
Вращающий момент – это… Что такое Вращающий момент?
Момент силы (синонимы: крутящий момент; вращательный момент; вращающий момент) — физическая величина, характеризующая вращательное действие силы на твёрдое тело.
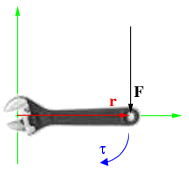
Момент силы приложенный к гаечному ключу

Отношение между векторами силы, момента силы и импульса во вращающейся системе
Момент силы
В физике момент силы можно понимать как «вращающая сила». В системе СИ единицами измерения для момента силы является ньютон-метр, хотя сантиньютон-метр (cN•m), футо-фунт (ft•lbf), дюйм-фунт (lbf•in) и дюйм-унция (ozf•in) также часто используются для выражения момента силы. Символ момента силы τ (тау). Момент силы иногда называют моментом пары сил, это понятие возникло в трудах Архимеда над рычагами. Вращающиеся аналоги силы, массы и ускорения есть момент силы, момент инерции и угловое ускорение соответственно. Сила, приложенная к рычагу, умноженная на расстояние до оси рычага, есть момент силы. Например, сила в 3 ньютона, приложенная к рычагу, расстояние до оси которого 2 метра, это то же самое, что 1 ньютон, приложенный к рычагу, расстояние до оси которого 6 метров. Более точно, момент силы частицы определяется как векторное произведение:

где  — сила, действующая на частицу, а
— сила, действующая на частицу, а  — радиус-вектор частицы!
— радиус-вектор частицы!
Предыстория
Строго говоря, вектор, обозначающий момент сил, введен искуственно, так как является удобным при вычислении работы по криволинейному участку относительно неподвижной оси и удобен при вычислении общего момента сил всей системы, так как может суммироваться. Для того, чтобы понять откуда появилось обозначение момента сил и как до него додумались, стоит рассмотреть действие силы на рычаг, относительно неподвижной оси.
Работа, совершаемая при действии силы  на рычаг
на рычаг  , совершающего вращательное движение вокруг неподвижной оси, может быть рассчитана исходя из следующих соображений.
, совершающего вращательное движение вокруг неподвижной оси, может быть рассчитана исходя из следующих соображений.
Пусть под действием этой силы конец рычага смещается на бесконечно малый отрезок  , которому соответствует бесконечно малый угол
, которому соответствует бесконечно малый угол 
 вектор, который направлен вдоль бесконечно малого отрезка и равен ему по модулю. Угол между вектором силы и вектором равен
вектор, который направлен вдоль бесконечно малого отрезка и равен ему по модулю. Угол между вектором силы и вектором равен  , а угол
, а угол  и вектором силы .
и вектором силы .Следовательно, бесконечно малая работа  , совершаемая силой на бесконечно малом участке равна скалярному произведению вектора и вектора силы, то есть
, совершаемая силой на бесконечно малом участке равна скалярному произведению вектора и вектора силы, то есть  .
.
Теперь попытаемся выразить модуль вектора
, а проекцию вектора силы на вектор , через угол .В первом случае, используя теорему Пифагора, можно записать следующее равенство  , где в случае малого угла справедливо
, где в случае малого угла справедливо 

Для проекции вектора силы на вектор , видно, что угол  , так как для бесконечно малого перемещения рычага , можно считать, что траектория перемещения перпендикулярна рычагу
, так как для бесконечно малого перемещения рычага , можно считать, что траектория перемещения перпендикулярна рычагу
 , получаем, что
, получаем, что  .
.Теперь запишем бесконечно малую работу через новые равенства  или
или  .
.
Теперь видно, что произведение  есть ни что иное как модуль векторного произведения векторов
есть ни что иное как модуль векторного произведения векторов
, то есть  , которое и было принято обозначить за момент силы
, которое и было принято обозначить за момент силы  или модуля вектора момента силы
или модуля вектора момента силы  .
.И теперь полная работа записывается очень просто 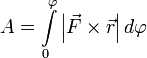 или
или 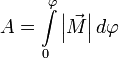 .
.
Единицы
Момент силы имеет размерность сила на расстояние, и в системе СИ единицей момента силы является «ньютон-метр». Джоуль, единица СИ для энергии и работы, тоже определяется как 1Н*м, но эта единица не используется для момента силы. Когда энергия представляется как результат «сила на расстояние», энергия скалярная, тогда как момент силы — это «сила, векторно умноженная на расстояние» и таким образом она (псевдо) векторная величина. Конечно, совпадение размерности этих величин не простое совпадение; момент силы 1Н*м, приложенный через целый оборот, требует энергии как раз 2*π джоулей. Математически
 ,
,
где Е — энергия, τ — вращающий момент, θ — угол в радианах.
Специальные случаи
Формула момента рычага
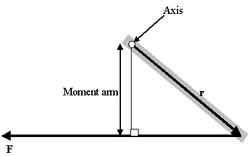
Момент рычага
Очень интересен особый случай, представляемый как определение момента силы в поле:
- τ = МОМЕНТ РЫЧАГА * СИЛУ
Проблема такого представления в том, что оно не дает направления момента силы, а только его величину, поэтому трудно рассматривать в.м. в 3-хмерном случае. Если сила перпендикулярна вектору r, момент рычага будет равен расстоянию до центра и момент силы будет максимален
 = РАССТОЯНИЕ ДО ЦЕНТРА * СИЛУ
= РАССТОЯНИЕ ДО ЦЕНТРА * СИЛУ
Сила под углом
Если сила F направлена под углом θ к рычагу r, то τ = r*F*sinθ, где θ это угол между рычагом и приложенной силой
Статическое равновесие
Для того чтобы объект находился в равновесии, должна равняться нулю не только сумма всех сил, но и сумма всех моментов силы вокруг любой точки. Для 2-хмерного случая с горизонтальными и вертикальными силами: сумма сил в двух измерениях ΣH=0, ΣV=0 и момент силы в третьем измерении Στ=0.
Момент силы как функция от времени
Момент силы — производная по времени от момент импульса,
 ,
,
где L — момент импульса. Момент импульса твердого тела может быть описан через произведение момента инерции и угловой скорости.
 ,
,
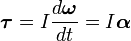
То есть если I постоянная, то
 ,
,
где α — угловое ускорение, измеряемое в радианах в секунду за секунду.
Отношение между моментом силы и мощностью
Если сила совершает действие на каком-либо расстоянии, то она совершает механическую работу. Также если момент силы совершает действие через угловое расстояние, он совершает работу.
 = МОМЕНТ СИЛЫ * УГЛОВАЯ СКОРОСТЬ
= МОМЕНТ СИЛЫ * УГЛОВАЯ СКОРОСТЬ
В системе СИ мощность измеряется в Ваттах, момент силы в ньютон-метрах, а УГЛОВАЯ СКОРОСТЬ в радианах в секунду.
Отношение между моментом силы и работой
 = МОМЕНТ СИЛЫ * УГОЛ
= МОМЕНТ СИЛЫ * УГОЛ
В системе СИ работа измеряется в Джоулях, момент силы в Ньютон * метр, а УГОЛ в в радианах.
Обычно известна угловая скорость  в радианах в секунду и время действия МОМЕНТА
в радианах в секунду и время действия МОМЕНТА  .
.
Тогда совершенная МОМЕНТОМ силы РАБОТА рассчитывается как:
- = МОМЕНТ СИЛЫ * *
Момент силы относительно точки
Если имеется материальная точка  , к которой приложена сила , то момент силы относительно точки
, к которой приложена сила , то момент силы относительно точки  равен векторному произведению радиус-вектора , соединяющий точки O и OF, на вектор силы :
равен векторному произведению радиус-вектора , соединяющий точки O и OF, на вектор силы :
 .
.
Момент силы относительно оси
Моментом силы относительно оси называется момент проекции силы на плоскость, перпендикулярную оси относительно точки пересечения оси с этой плоскостью.
Единицы измерения
Момент силы измеряется в ньютон-метрах. 1 Н•м — момент силы, который производит сила 1 Н на рычаг длиной 1 м.
Измерение момента
На сегодняшний день измерение момента силы осуществляется с помощью тензометрических, оптических и индуктивных датчиков нагрузки. В России при решении задач измерения момента в основном используется оборудование зарубежных производителей (HBM (Германия), Kyowa (Япония), Dacell (Корея) и ряда других).
См. также
Wikimedia Foundation. 2010.
dic.academic.ru
15.Вращательное движение. Момент силы и момент импульса.
Враща́тельное движе́ние — вид механического движения. При вращательном движении абсолютно твёрдого тела его точки описывают окружности, расположенные в параллельных плоскостях. Центры всех окружностей лежат при этом на одной прямой, перпендикулярной к плоскостям окружностей и называемой осью вращения. Ось вращения может располагаться внутри тела и за его пределами. Ось вращения в данной системе отсчёта может быть как подвижной, так и неподвижной. Например, в системе отсчёта, связанной с Землёй, ось вращения ротора генератора на электростанции неподвижна.
Кинетические характеристики:
Вращение
твердого тела, как целого характеризуется
углом  ,
измеряющегося в угловых градусах или
радианах, угловой скоростью (измеряется
в рад/с)
,
измеряющегося в угловых градусах или
радианах, угловой скоростью (измеряется
в рад/с) и
угловым ускорением
и
угловым ускорением (единица
измерения — рад/с²).
(единица
измерения — рад/с²).
При равномерном вращении (T оборотов в секунду):
Частота
вращения — число оборотов тела в единицу
времени.-
,
Период
вращения — время одного полного оборота.
Период вращения T и его частота связаны
соотношением .
Линейная
скорость точки, находящейся на расстоянии
R от оси вращения
Угловая
скорость вращения тела 
Момент силы (синонимы: крутящий момент, вращательный момент, вертящий момент, вращающий момент) — векторная физическая величина, равная векторному произведению радиус-вектора (проведённого от оси вращения к точке приложения силы — по определению), на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело.
Момент силы измеряется в ньютон-метрах. 1 Н·м — момент силы, который производит сила 1 Н на рычаг длиной 1 м. Сила приложена к концу рычага и направлена перпендикулярно ему.

Моме́нт и́мпульса (кинетический момент, угловой момент, орбитальный момент, момент количества движения) характеризует количество вращательного движения. Величина, зависящая от того, сколько массы вращается, как она распределена относительно оси вращения и с какой скоростью происходит вращение. Момент импульса замкнутой системы сохраняется

Зако́н сохране́ния моме́нта и́мпульса (закон сохранения углового момента) — один из фундаментальных законов сохранения. Математически выражается через векторную сумму всех моментов импульса относительно выбранной оси для замкнутой системы тел и остается постоянной, пока на систему не воздействуют внешние силы. В соответствии с этим момент импульса замкнутой системы в любой системе координат не изменяется со временем.
Закон сохранения момента импульса есть проявление изотропности пространства относительно поворота.
16.Уравнение динамики вращательного движения. Момент инерции.
Основное уравнение динамики вращательного движения материальной точки – угловое ускорение точки при ее вращении вокруг неподвижной оси пропорционально вращающему моменту и обратно пропорционально моменту инерции.
М
= E*J или E = M/J 

Сравнивая полученное выражение со вторым законом Ньютона с поступательным законом, видим, что момент инерции J является мерой инертности тела во вращательном движении. Как и масса величина аддитивная.
Момент инерции — скалярная (в общем случае — тензорная) физическая величина, мера инертности во вращательном движении вокруг оси, подобно тому, как масса тела является мерой его инертности в поступательном движении. Характеризуется распределением масс в теле: момент инерции равен сумме произведений элементарных масс на квадрат их расстояний до базового множества (точки, прямой или плоскости).
Единица измерения СИ: кг·м².Обозначение: I или J.
Различают несколько моментов инерции — в зависимости от многообразия, от которого отсчитывается расстояние точек.
Свойства момента инерции:
1.Момент инерции системы равен сумме момента инерции её частей.
2.Момент инерции тела является величиной, иманентно присущей этому телу.
Момент инерции твердого тела – это велина, характеризующая распределение массы в теле и являющаяся мерой инертности тела при вращательном движении.
Формула момента инерции:

Теорема Штейнера:
Момент
инерции тела относительно какой-либо
оси равен моменту инерции относительно
параллельной оси, проходящей через
центр инерции, сложенной с величиной
m*(R*R), где R – расстояние между осями. 
Моментом
инерции механической системы относительно
неподвижной оси («осевой момент инерции»)
называется величина Ja, равная сумме
произведений масс всех n материальных
точек системы на квадраты их расстояний
до оси:
Осевой
момент инерции тела Ja является мерой
инертности тела во вращательном движении
вокруг оси подобно тому, как масса тела
является мерой его инертности в
поступательном движении.
Центральный момент инерции (или момент инерции относительно точки O) — это величина
 .
.
studfile.net
8 Расчет крутящих моментов на валах
8.1 Расчет крутящего момента на валу электродвигателя
Для определения крутящего момента на валу электродвигателя привода главного движения используется номинальная мощность и номинальная частота вращения:

где  – мощность электродвигателя, кВт:
– мощность электродвигателя, кВт:
 –номинальная
частота вращения электродвигателя,
мин-1:
–номинальная
частота вращения электродвигателя,
мин-1:
 .
.
 .
.
8.2 Расчет крутящего момента на валах привода
Крутящий момент на валах привода рассчитывается по формуле:

где  – мощность электродвигателя, кВт:
– мощность электродвигателя, кВт: 
 –КПД
участка привода от электродвигателя
до соответствующего вала;
–КПД
участка привода от электродвигателя
до соответствующего вала;
 –расчетная
частота вращения соответствующего
вала, принимается по графику частот,
мин-1.
–расчетная
частота вращения соответствующего
вала, принимается по графику частот,
мин-1.
8.3 Расчет крутящего момента на первом валу привода
Крутящий момент на первом валу привода рассчитывается по формуле:
где  – мощность электродвигателя, кВт:
– мощность электродвигателя, кВт:
 –КПД
участка привода от электродвигателя
до 1-го вала;
–КПД
участка привода от электродвигателя
до 1-го вала;
 –расчетная
частота вращения на 1-ом валу, принимаем
по графику частот, мин-1:
–расчетная
частота вращения на 1-ом валу, принимаем
по графику частот, мин-1:  = 2850 мин-1.
= 2850 мин-1.
КПД участка привода до первого вала рассчитывается по формуле:

где  – КПД зубчатой муфты;
– КПД зубчатой муфты;
 –КПД
пары подшипников;
–КПД
пары подшипников; 


8.4 Расчет крутящего момента на втором валу привода
Крутящий момент на втором валу привода рассчитывается по формуле:
где  – мощность электродвигателя, кВт:
– мощность электродвигателя, кВт:
 –КПД
участка привода от электродвигателя
до 2-го вала;
–КПД
участка привода от электродвигателя
до 2-го вала;
 –расчетная
частота вращения на 1-ом валу, принимаем
по графику частот, мин-1:
–расчетная
частота вращения на 1-ом валу, принимаем
по графику частот, мин-1:  = 630 мин-1.
= 630 мин-1.
КПД участка привода до второго вала рассчитывается по формуле:

где  –
КПД зубчатой муфты;
–
КПД зубчатой муфты;
 –КПД
пары подшипников;
–КПД
пары подшипников;
 –
КПД зацепления зубчатых колес;
–
КПД зацепления зубчатых колес;  .
.


8.5 Расчет крутящего момента на третьем валу привода
Крутящий момент на третьем валу привода рассчитывается по формуле:
где  – мощность электродвигателя, кВт:
– мощность электродвигателя, кВт:
 –КПД
участка привода от электродвигателя
до 3-го вала;
–КПД
участка привода от электродвигателя
до 3-го вала;
 –расчетная
частота вращения на 1-ом валу, принимаем
по графику частот, мин-1:
–расчетная
частота вращения на 1-ом валу, принимаем
по графику частот, мин-1:  = 160 мин-1.
= 160 мин-1.
КПД участка привода до третьего вала рассчитывается по формуле:

где  –
КПД зубчатой муфты;
–
КПД зубчатой муфты;
 –КПД
пары подшипников;
–КПД
пары подшипников; 
 –
КПД зацепления зубчатых колес;
–
КПД зацепления зубчатых колес;  .
.


8.6 Расчет крутящего момента на четвертом валу привода
Крутящий момент на четвертом валу привода рассчитывается по формуле:

где  – мощность электродвигателя, кВт:
– мощность электродвигателя, кВт:
 –КПД
участка привода от электродвигателя
до 4-го вала;
–КПД
участка привода от электродвигателя
до 4-го вала;
 –расчетная
частота вращения на 4-ом валу, определяется
по формуле:
–расчетная
частота вращения на 4-ом валу, определяется
по формуле:
где  – минимальная частота вращения четвертого
вала, мин-1:
– минимальная частота вращения четвертого
вала, мин-1:
 мин-1;
мин-1;
 –максимальная
частота вращения четвертого вала, мин-1:
–максимальная
частота вращения четвертого вала, мин-1:
 мин-1.
мин-1.
КПД участка привода до четвертого вала рассчитывается по формуле:

где  –
КПД зубчатой муфты;
–
КПД зубчатой муфты;
 –КПД
пары подшипников;
–КПД
пары подшипников; 
 –КПД
зацепления зубчатых колес;
–КПД
зацепления зубчатых колес;  .
.


8.7 Расчет крутящего момента на шпинделе
Крутящий момент на шпинделе рассчитывается по формуле:
где  – мощность электродвигателя, кВт:
– мощность электродвигателя, кВт:
 –КПД
участка привода от электродвигателя
до шпинделя;
–КПД
участка привода от электродвигателя
до шпинделя;
 –расчетная
частота вращения шпинделя, определяется
по формуле:
–расчетная
частота вращения шпинделя, определяется
по формуле:

где  – минимальная частота вращения четвертого
вала, мин-1:
– минимальная частота вращения четвертого
вала, мин-1:
 мин-1;
мин-1;
 –диапазон
регулирования частот вращения шпинделя:
–диапазон
регулирования частот вращения шпинделя: 

КПД участка привода до шпинделя рассчитывается по формуле:

где  –
КПД зубчатой муфты;
–
КПД зубчатой муфты;
 –КПД
пары подшипников;
–КПД
пары подшипников; 
 –КПД
зацепления зубчатых колес;
–КПД
зацепления зубчатых колес;  .
.


9 Проектный расчет передач
9.1 Расчет цилиндрической прямозубой постоянной передачиz1–z2
9.1.1 Исходные данные
1. Расчетный крутящий момент на первом валу привода, H·м:
Т1 = 13 Н·м;
2. Число зубьев шестерни: z1 = 18;
3. Число зубьев колеса: z2 = 83;
4. Передаточное число передачи: u1 = 4,76.
9.1.2 Выбор материала и термической обработки зубчатых колес
В качестве материала для зубчатых колес передачи выбираем сталь 40Х, которая отвечает необходимым техническим и эксплуатационным требованиям. В качестве термической обработки выбираем объемную закалку, позволяющую получить твердость зубьев 40..50HRCэ.
9.1.3
Проектный расчет постоянной прямозубой
зубчатой передачи  на контактную выносливость
на контактную выносливость
Диаметр
начальной окружности шестерни  рассчитывается по формуле:
рассчитывается по формуле:
где  вспомогательный
коэффициент: для прямозубых передач
вспомогательный
коэффициент: для прямозубых передач
 –
расчётный крутящий момент на первом
валу, Н·м: Т1=13
Н·м;
–
расчётный крутящий момент на первом
валу, Н·м: Т1=13
Н·м;
 коэффициент
нагрузки для шестерни, равный 1,3..1,5:
принимаем
коэффициент
нагрузки для шестерни, равный 1,3..1,5:
принимаем 
 –
передаточное число:
–
передаточное число: 
 отношение
рабочей ширины венца передачи к начальному
диаметру шестерни:
отношение
рабочей ширины венца передачи к начальному
диаметру шестерни: 
 допускаемое
контактное напряжение, МПа.
допускаемое
контактное напряжение, МПа.
Допускаемое контактное напряжение для прямозубых передач рассчитывается по формуле:

где  базовый
предел контактной выносливости
поверхностей зубьев, соответствующий
базовому числу циклов перемены напряжений,
МПа;
базовый
предел контактной выносливости
поверхностей зубьев, соответствующий
базовому числу циклов перемены напряжений,
МПа;
 МПа;
МПа;
SH – коэффициент безопасности: SH = 1,1.

Коэффициент отношения рабочей ширины венца передачи к начальному диаметру шестерни может приниматься в пределах
 или
определяется
по формуле:
или
определяется
по формуле:

 отношение
рабочей ширины венца передачи к модулю:
отношение
рабочей ширины венца передачи к модулю:  принимаем
принимаем
 число
зубьев шестерни: z1 = 18.
число
зубьев шестерни: z1 = 18.

что
находится в допустимых пределах  .
.
Таким образом, диаметр начальной окружности шестерни равен:

Модуль постоянной прямозубой передачи определяется из условия расчета на контактную выносливость зубьев по рассчитанному значению диаметра начальной окружности шестерни по формуле:

где  диаметр
начальной окружности шестерни, мм:dw1 =
38,75 мм;
диаметр
начальной окружности шестерни, мм:dw1 =
38,75 мм;
 число
зубьев шестерни: z1 = 18.
число
зубьев шестерни: z1 = 18.
studfile.net
Мощность и вращающий момент электродвигателя. Что это такое?
Мощность и вращающий момент электродвигателя
Данная глава посвящена вращающему моменту: что это такое, для чего он нужен и др. Мы также разберём типы нагрузок в зависимости от моделей насосов и соответствие между электродвигателем и нагрузкой насоса.
Вы когда-нибудь пробовали провернуть вал пустого насоса руками? Теперь представьте, что вы поворачиваете его, когда насос заполнен водой. Вы почувствуете, что в этом случае, чтобы создать вращающий момент, требуется гораздо большее усилие.
А теперь представьте, что вам надо крутить вал насоса несколько часов подряд. Вы бы устали быстрее, если бы насос был заполнен водой, и почувствовали бы, что потратили намного больше сил за тот же период времени, чем при выполнении тех же манипуляций с пустым насосом. Ваши наблюдения абсолютно верны: требуется большая мощность, которая является мерой работы (потраченной энергии) в единицу времени. Как правило, мощность стандартного электродвигателя выражается в кВт.
Вращающий момент (T) – это произведение силы на плечо силы. В Европе он измеряется в Ньютонах на метр (Нм).
Как видно из формулы, вращающий момент увеличивается, если возрастает сила или плечо силы – или и то и другое. Например, если мы приложим к валу силу в 10 Н, эквивалентную 1 кг, при длине рычага (плече силы) 1 м, в результате, вращающий момент будет 10 Нм. При увеличении силы до 20 Н или 2 кг, вращающий момент будет 20 Нм. Таким же образом, вращающий момент был бы 20 Нм, если бы рычаг увеличился до 2 м, а сила составляла 10 Н. Или при вращающем моменте в 10 Нм с плечом силы 0,5 м сила должна быть 20 Н.
Работа и мощность
Теперь остановимся на таком понятии как «работа», которое в данном контексте имеет особое значение. Работа совершается всякий раз, когда сила – любая сила – вызывает движение. Работа равна силе, умноженной на расстояние. Для линейного движения мощность выражается как работа в определённый момент времени.
Если мы говорим о вращении, мощность выражается как вращающий момент (T), умноженный на частоту вращения (w).
Частота вращения объекта определяется измерением времени, за которое определённая точка вращающегося объекта совершит полный оборот. Обычно эта величина выражается в оборотах в минуту, т.е. мин-1 или об/мин. Например, если объект совершает 10 полных оборотов в минуту, это означает, что его частота вращения: 10 мин-1 или 10 об/мин.
Итак, частота вращения измеряется в оборотах в минуту, т.е. мин-1.
Приведем единицы измерения к общему виду.
Для наглядности возьмём разные электродвигатели, чтобы более подробно проанализировать соотношение между мощностью, вращающим моментом и частотой вращения. Несмотря на то, что вращающий момент и частота вращения электродвигателей сильно различаются, они могут иметь одинаковую мощность.
Например, предположим, что у нас 2-полюсный электродвигатель (с частотой вращения 3000 мин-1) и 4-полюсной электродвигатель (с частотой вращения 1500 мин-1). Мощность обоих электродвигателей 3,0 кВт, но их вращающие моменты отличаются.
Таким образом, вращающий момент 4-полюсного электродвигателя в два раза больше вращающего момента двухполюсного электродвигателя с той же мощностью.
Как образуется вращающий момент и частота вращения?
Теперь, после того, как мы изучили основы вращающего момента и скорости вращения, следует остановиться на том, как они создаются.
В электродвигателях переменного тока вращающий момент и частота вращения создаются в результате взаимодействия между ротором и вращающимся магнитным полем. Магнитное поле вокруг обмоток ротора будет стремиться к магнитному полю статора. В реальных рабочих условиях частота вращения ротора всегда отстаёт от магнитного поля. Таким образом, магнитное поле ротора пересекает магнитное поле статора и отстает от него и создаёт вращающий момент. Разницу в частоте вращения ротора и статора, которая измеряется в %, называют скоростью скольжения.
Скольжение является основным параметром электродвигателя, характеризующий его режим работы и нагрузку. Чем больше нагрузка, с которой должен работать электродвигатель, тем больше скольжение.
Помня о том, что было сказано выше, разберём ещё несколько формул. Вращающий момент индукционного электродвигателя зависит от силы магнитных полей ротора и статора, а также от фазового соотношения между этими полями. Это соотношение показано в следующей формуле:
Сила магнитного поля, в первую очередь, зависит от конструкции статора и материалов, из которых статор изготовлен. Однако напряжение и частота тока также играют важную роль. Отношение вращающих моментов пропорционально квадрату отношения напряжений, т.е. если подаваемое напряжение падает на 2%, вращающий момент, следовательно, уменьшается на 4%.
Потребляемая мощность электродвигателя
Ток ротора индуцируется через источник питания, к которому подсоединён электродвигатель, а магнитное поле частично создаётся напряжением. Входную мощность можно вычислить, если нам известны данные источника питания электродвигателя, т.е. напряжение, коэффициент мощности, потребляемый ток и КПД.
В Европе мощность на валу обычно измеряется в киловаттах. В США мощность на валу измеряется в лошадиных силах (л.с.).
Если вам необходимо перевести лошадиные силы в киловатты, просто умножьте соответствующую величину (в лошадиных силах) на 0,746. Например, 20 л.с. равняется (20 • 0,746) = 14,92 кВт.
И наоборот, киловатты можно перевести в лошадиные силы умножением величины в киловаттах на 1,341. Это значит, что 15 кВт равняется 20,11 л.с.
Момент электродвигателя
Мощность [кВт или л.с.] связывает вращающий момент с частотой вращения, чтобы определить общий объём работы, который должен быть выполнен за определённый промежуток времени.
Рассмотрим взаимодействие между вращающим моментом, мощностью и частотой вращения, а также их связь с электрическим напряжением на примере электродвигателей Grundfos. Электродвигатели имеют одну и ту же номинальную мощность как при 50 Гц, так и при 60 Гц.
Это влечёт за собой резкое снижение вращающего момента при 60 Гц: частота 60 Гц вызывает 20%-ное увеличение числа оборотов, что приводит к 20%-ному уменьшению вращающего момента. Большинство производителей предпочитают указывать мощность электродвигателя при 60 Гц, таким образом, при снижении частоты тока в сети до 50 Гц электродвигатели будут обеспечивать меньшую мощность на валу и вращающий момент. Электродвигатели обеспечивают одинаковую мощность при 50 и 60 Гц.
Графическое представление вращающего момента электродвигателя изображено на рисунке.
Иллюстрация представляет типичную характеристику вращающий момент/частота вращения. Ниже приведены термины, используемые для характеристики вращающего момента электродвигателя переменного тока.
Пусковой момент (Мп): Механический вращающий момент, развиваемый электродвигателем на валу при пуске, т.е. когда через электродвигатель пропускается ток при полном напряжении, при этом вал застопорен.
Минимальный пусковой момент (Ммин): Этот термин используется для обозначения самой низкой точки на кривой вращающий момент/частота вращения электродвигателя, нагрузка которого увеличивается до полной скорости вращения. Для большинства электродвигателей Grundfos величина минимального пускового момента отдельно не указывается, так как самая низкая точка находится в точке заторможенного ротора. В результате для большинства электродвигателей Grundfos минимальный пусковой момент такой же, как пусковой момент.
Блокировочный момент (Мблок): Максимальный вращающий момент – момент, который создаёт электродвигатель переменного тока с номинальным напряжением, подаваемым при номинальной частоте, без резких скачков скорости вращения. Его называют предельным перегрузочным моментом или максимальным вращающим моментом.
Вращающий момент при полной нагрузке (Мп.н.): Вращающий момент, необходимый для создания номинальной мощности при полной нагрузке.
Нагрузка насосов и типы нагрузки электродвигателя
Выделяют следующие типы нагрузок:
Постоянная мощность
Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п.
Постоянный вращающий момент
Как видно из названия – «постоянный вращающий момент» – подразумевается, что величина вращающего момента, необходимого для приведения в действие какого- либо механизма, постоянна, независимо от скорости вращения. Примером такого режима работы могут служить конвейеры.
Переменный вращающий момент и мощность
«Переменный вращающий момент» – эта категория представляет для нас наибольший интерес. Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы.
Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности.
Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия, которые описывают соотношение между разностями давления и расходами.
Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
Во-вторых, напор насоса будет меняться пропорционально квадрату изменения скорости вращения. Если частота вращения увеличивается на 25%, напор возрастает на 56%.
В-третьих, что особенно интересно, мощность пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая частота вращения уменьшается на 50%, это равняется 87,5%-ному уменьшению потребляемой мощности.
Итак, законы подобия объясняют, почему использование приводов с переменной частотой вращения более целесообразно в тех областях применения, где требуются переменные значения расхода и давления. Grundfos предлагает ряд электродвигателей со встроенным частотным преобразователем, который регулирует частоту вращения для достижения именно этой цели.
Так же как подача, давление и мощность, потребная величина вращающего момента зависит от скорости вращения.
На рисунке показан центробежный насос в разрезе. Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения – мал, а потребный вращающий момент при высокой частоте вращения – велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность – кубу скорости вращения.
Это можно проиллюстрировать на примере характеристики вращающий момент/частота вращения, которую мы использовали ранее, когда рассказывали о вращающем моменте электродвигателя:
Когда электродвигатель набирает скорость от нуля до номинальной скорости, вращающий момент может значительно меняться. Величина вращающего момента, необходимая при определённой нагрузке, также изменяется с частотой вращения. Чтобы электродвигатель подходил для определённой нагрузки, необходимо чтобы величина вращающего момента электродвигателя всегда превышала вращающий момент, необходимый для данной нагрузки.
В примере, центробежный насос при номинальной нагрузке имеет вращающий момент, равный 70 Нм, что соответствует 22 кВт при номинальной частоте вращения 3000 мин-1. В данном случае насосу при пуске требуется 20% вращающего момента при номинальной нагрузке, т.е. приблизительно 14 Нм. После пуска вращающий момент немного падает, а затем, по мере того, как насос набирает скорость, увеличивается до величины полной нагрузки.
Очевидно, что нам необходим насос, который будет обеспечивать требуемые значения расход/напор (Q/H). Это значит, что нельзя допускать остановок электродвигателя, кроме того, электродвигатель должен постоянно ускоряться до тех пор, пока не достигнет номинальной скорости. Следовательно, необходимо, чтобы характеристика вращающего момента совпадала или превышала характеристику нагрузки на всём диапазоне от 0% до 100% скорости вращения. Любой «избыточный» момент, т.е. разница между кривой нагрузки и кривой электродвигателя, используется как ускорение вращения.
Соответствие электродвигателя нагрузке
Если нужно определить, отвечает ли вращающий момент определённого электродвигателя требованиям нагрузки, Вы можете сравнить характеристики скорости вращения/вращающего момента электродвигателя с характеристикой скорости вращения/ вращающего момента нагрузки. Вращающий момент, создаваемый электродвигателем, должен превышать потребный для нагрузки вращающий момент, включая периоды ускорения и полной скорости вращения.
Характеристика зависимости вращающего момента от скорости вращения стандартного электродвигателя и центробежного насоса.
Если мы посмотрим на характеристику , то увидим, что при ускорении электродвигателя его пуск производится при токе, соответствующем 550% тока полной нагрузки.
Когда двигатель приближается к своему номинальному значению скорости вращения, ток снижается. Как и следовало ожидать, во время начального периода пуска потери на электродвигателе высоки, поэтому этот период не должен быть продолжительным, чтобы не допустить перегрева.
Очень важно, чтобы максимальная скорость вращения достигалась как можно точнее. Это связано с потребляемой мощностью: например, увеличение скорости вращения на 1% по сравнению со стандартным максимумом приводит к 3%-ному увеличению потребляемой мощности.
Потребляемая мощность пропорциональна диаметру рабочего колеса насоса в четвертой степени.
Уменьшение диаметра рабочего колеса насоса на 10% приводит к уменьшению потребляемой мощности на (1- (0.9 * 0.9 * 0.9 * 0.9)) * 100 = 34%, что равно 66% номинальной мощности. Эта зависимость определяется исключительно на практике, так как зависит от типа насоса, конструкции рабочего колеса и от того, насколько вы уменьшаете диаметр рабочего колеса.
Время пуска электрдвигателя
Если нам необходимо подобрать типоразмер электродвигателя для определённой нагрузки, например для центробежных насосов, основная наша задача состоит в том, чтобы обеспечить соответствующий вращающий момент и мощность в номинальной рабочей точке, потому что пусковой момент для центробежных насосов довольно низкий. Время пуска достаточно ограниченно, так как вращающий момент довольно высокий.
Нередко для сложных систем защиты и контроля электродвигателей требуется некоторое время для их пуска, чтобы они могли замерить пусковой ток электродвигателя. Время пуска электродвигателя и насоса рассчитывается с помощью следующей формулы:
tпуск = время, необходимое электродвигателю насоса, чтобы достичь частоты вращения при полной нагрузке
n = частота вращения электродвигателя при полной нагрузке
Iобщ = инерция, которая требует ускорения, т.е. инерция вала электродвигателя, ротора, вала насоса и рабочих колёс.
Момент инерции для насосов и электродвигателей можно найти в соответствующих технических данных.
Мизб = избыточный момент, ускоряющий вращение. Избыточный момент равен вращающему моменту электродвигателя минус вращающий момент насоса при различных частотах вращения.
Мизб можно рассчитать по следующим формулам:
Как видно из приведённых вычислений, выполненных для данного примера с электродвигателем мощностью 4 кВт насоса CR, время пуска составляет 0,11 секунды.
Число пусков электродвигателя в час
Современные сложные системы управления электродвигателями могут контролировать число пусков в час каждого конкретного насоса и электродвигателя. Необходимость контроля этого параметра состоит в том, что каждый раз, когда осуществляется пуск электродвигателя с последующим ускорением, отмечается высокое потребление пускового тока. Пусковой ток нагревает электродвигатель. Если электродвигатель не остывает, продолжительная нагрузка от пускового тока значительно нагревает обмотки статора электродвигателя, что приводит к выходу из строя электродвигателя или сокращению срока службы изоляции.
Обычно за количество пусков, которое может выполнить электродвигатель в час, отвечает поставщик электродвигателя. Например, Grundfos указывает максимальное число пусков в час в технических данных на насос, так как максимальное количество пусков зависит от момента инерции насоса.
Мощность и КПД (eta) электродвигателя
Существует прямая связь между мощностью, потребляемой электродвигателем от сети, мощностью на валу электродвигателя и гидравлической мощностью, развиваемой насосом.
При производстве насосов используются следующие обозначения этих трёх различных типов мощности.
P1 (кВт) Входная электрическая мощность насосов – это мощность, которую электродвигатель насоса получает от источника электрического питания. Мощность P! равна мощности P2, разделённой на КПД электродвигателя.
P2 (кВт) Мощность на валу электродвигателя – это мощность, которую электродвигатель передает на вал насоса.
Р3 (кВт) Входная мощность насоса = P2, при условии, что соединительная муфта между валами насоса и электродвигателя не рассеивает энергию.
Р4 (кВт) Гидравлическая мощность насоса.
www.eti.su
определения, единица измерения, примеры, относительно оси и точки
В статье мы расскажем про момент силы относительно точки и оси, определения, рисунки и графики, какая единица измерения момента силы, работа и сила во вращательном движении, а также примеры и задачи.
Момент силы представляет собой вектор физической величины, равный произведению векторов плеча силы (радиус-вектор частицы) и силы, действующей на точку. Силовой рычаг представляет собой вектор, соединяющий точку, через которую проходит ось вращения твердого тела с точкой, к которой приложена сила.

где: r — плечо силы, F — сила приложенная на тело.
Направление вектора силы момента всегда перпендикулярно плоскости, определяемой векторами r и F.
Главный момент — любая система сил на плоскости относительно принятого полюса называется алгебраическим моментом момента всех сил этой системы относительно этого полюса.
Во вращательных движениях важны не только сами физические величины, но и то, как они расположены относительно оси вращения, то есть их моменты. Мы уже знаем, что во вращательном движении важна не только масса, но и момент инерции. В случае силы, ее эффективность для запуска ускорения определяется способом приложения этой силы к оси вращения.

Взаимосвязь между силой и способом ее применения описывает МОМЕНТ СИЛЫ. Момент силы — это векторное произведение силового плеча R на вектор силы F:


Как в каждом векторном произведении, так и здесь



Следовательно, сила не будет влиять на вращение, когда угол между векторами силы F и рычагом R равен 0o или 180o. Каков эффект применения момента силы М?
Мы используем второй Закон движения Ньютона и связь между канатом и угловой скоростью v = Rω в скалярной форме, действительны, когда векторы R и ω перпендикулярны друг другу

Умножив обе части уравнения на R, получим

Поскольку mR 2 = I, мы заключаем, что

Вышеуказанная зависимость справедлива и для случая материального тела. Обратите внимание, что в то время как внешняя сила дает линейное ускорение a, момент внешней силы дает угловое ускорение ε.

Единица измерения момента силы
Основной мерой измерения момента силы в системной координате СИ является: [M]=Н•м
В СГС: [M]=дин•см
Работа и сила во вращательном движении
Работа в линейном движении определяется общим выражением,

но во вращательном движении,

а следовательно

Исходя из свойств смешанного произведения трех векторов, можно записать

Поэтому мы получили выражение для работы во вращательном движении:

Мощность во вращательном движении:

Момент силы пример и решение задач относительно точки
Найдите момент силы, действующей на тело в ситуациях, показанных на рисунках ниже. Предположим, что r = 1m и F = 2N.

а) поскольку угол между векторами r и F равен 90°, то sin(a)=1:
M = r • F = 1м • 2N = 2Н • м
б) потому что угол между векторами r и F равен 0°, поэтому sin(a)=0:
M = 0
да направленная сила не может дать точке вращательное движение.
c) поскольку угол между векторами r и F равен 30°, то sin(a)=0.5:
M = 0,5 r • F = 1Н • м.
Таким образом, направленная сила вызовет вращение тела, однако ее эффект будет меньше, чем в случае a).
Момент силы относительно оси
Предположим, что данные являются точкой O (полюс) и мощность P. В точке O мы принимаем начало прямоугольной системы координат. Момент силы Р по отношению к полюсным O представляет собой вектор М из (Р), (рисунок ниже).

Любая точка A на линии P имеет координаты (xo , yo , zo ).
Вектор силы P имеет координаты Px , Py, Pz. Комбинируя точку A (xo, yo, zo ) с началом системы, мы получаем вектор p. Координаты вектора силы P относительно полюса O обозначены символами Mx, My, Mz. Эти координаты могут быть вычислены как минимумы данного определителя, где ( i, j, k) — единичные векторы на осях координат (варианты): i, j, k

После решения определителя координаты момента будут равны:

Координаты вектора моментов Mo (P) называются моментами силы относительно соответствующей оси. Например, момент силы P относительно оси Oz окружает шаблон:
Mz = Pyxo — Pxyo
Этот паттерн интерпретируется геометрически так, как показано на рисунке ниже.

На основании этой интерпретации момент силы относительно оси Oz можно определить, как момент проекции силы P на перпендикуляр оси Oz относительно точки проникновения этой плоскости осью. Проекция силы P на перпендикуляр оси обозначена Pxy, а точка проникновения плоскости Oxy — осью Oс символом O.
Из приведенного выше определения момента силы относительно оси следует, что момент силы относительно оси равен нулю, когда сила и ось равны, в одной плоскости (когда сила параллельна оси или когда сила пересекает ось).
Используя формулы на Mx, My, Mz, мы можем рассчитать значение момента силы P относительно точки O и определить углы, содержащиеся между вектором M и осями системы:

Если сила лежит в плоскости Oxy, то zo = 0 и Pz = 0 (см. Рисунок ниже).

Момент силы P по отношению к точке (полюсу) O составляет:
Mx = 0,
My = 0,
Mo (P) = Mz = Pyxo — Pxyo.

Метка крутящего момента:
плюс (+) — вращение силы вокруг оси O по часовой стрелке,
минус (-) — вращение силы вокруг оси O против часовой стрелки.
meanders.ru
Вращательный момент – это… Что такое Вращательный момент?
Момент силы (синонимы: крутящий момент; вращательный момент; вращающий момент) — физическая величина, характеризующая вращательное действие силы на твёрдое тело.
Момент силы приложенный к гаечному ключу
Отношение между векторами силы, момента силы и импульса во вращающейся системе
Момент силы
В физике момент силы можно понимать как «вращающая сила». В системе СИ единицами измерения для момента силы является ньютон-метр, хотя сантиньютон-метр (cN•m), футо-фунт (ft•lbf), дюйм-фунт (lbf•in) и дюйм-унция (ozf•in) также часто используются для выражения момента силы. Символ момента силы τ (тау). Момент силы иногда называют моментом пары сил, это понятие возникло в трудах Архимеда над рычагами. Вращающиеся аналоги силы, массы и ускорения есть момент силы, момент инерции и угловое ускорение соответственно. Сила, приложенная к рычагу, умноженная на расстояние до оси рычага, есть момент силы. Например, сила в 3 ньютона, приложенная к рычагу, расстояние до оси которого 2 метра, это то же самое, что 1 ньютон, приложенный к рычагу, расстояние до оси которого 6 метров. Более точно, момент силы частицы определяется как векторное произведение:
где — сила, действующая на частицу, а — радиус-вектор частицы!
Предыстория
Строго говоря, вектор, обозначающий момент сил, введен искуственно, так как является удобным при вычислении работы по криволинейному участку относительно неподвижной оси и удобен при вычислении общего момента сил всей системы, так как может суммироваться. Для того, чтобы понять откуда появилось обозначение момента сил и как до него додумались, стоит рассмотреть действие силы на рычаг, относительно неподвижной оси.
Работа, совершаемая при действии силы на рычаг , совершающего вращательное движение вокруг неподвижной оси, может быть рассчитана исходя из следующих соображений.
Пусть под действием этой силы конец рычага смещается на бесконечно малый отрезок , которому соответствует бесконечно малый угол . Обозначим через вектор, который направлен вдоль бесконечно малого отрезка и равен ему по модулю. Угол между вектором силы и вектором равен , а угол и вектором силы .
Следовательно, бесконечно малая работа , совершаемая силой на бесконечно малом участке равна скалярному произведению вектора и вектора силы, то есть .
Теперь попытаемся выразить модуль вектора через радиус вектор , а проекцию вектора силы на вектор , через угол .
В первом случае, используя теорему Пифагора, можно записать следующее равенство , где в случае малого угла справедливо и следовательно
Для проекции вектора силы на вектор , видно, что угол , так как для бесконечно малого перемещения рычага , можно считать, что траектория перемещения перпендикулярна рычагу , а так как , получаем, что .
Теперь запишем бесконечно малую работу через новые равенства или .
Теперь видно, что произведение есть ни что иное как модуль векторного произведения векторов и , то есть , которое и было принято обозначить за момент силы или модуля вектора момента силы .
И теперь полная работа записывается очень просто или .
Единицы
Момент силы имеет размерность сила на расстояние, и в системе СИ единицей момента силы является «ньютон-метр». Джоуль, единица СИ для энергии и работы, тоже определяется как 1Н*м, но эта единица не используется для момента силы. Когда энергия представляется как результат «сила на расстояние», энергия скалярная, тогда как момент силы — это «сила, векторно умноженная на расстояние» и таким образом она (псевдо) векторная величина. Конечно, совпадение размерности этих величин не простое совпадение; момент силы 1Н*м, приложенный через целый оборот, требует энергии как раз 2*π джоулей. Математически
- ,
где Е — энергия, τ — вращающий момент, θ — угол в радианах.
Специальные случаи
Формула момента рычага
Момент рычага
Очень интересен особый случай, представляемый как определение момента силы в поле:
- τ = МОМЕНТ РЫЧАГА * СИЛУ
Проблема такого представления в том, что оно не дает направления момента силы, а только его величину, поэтому трудно рассматривать в.м. в 3-хмерном случае. Если сила перпендикулярна вектору r, момент рычага будет равен расстоянию до центра и момент силы будет максимален
- = РАССТОЯНИЕ ДО ЦЕНТРА * СИЛУ
Сила под углом
Если сила F направлена под углом θ к рычагу r, то τ = r*F*sinθ, где θ это угол между рычагом и приложенной силой
Статическое равновесие
Для того чтобы объект находился в равновесии, должна равняться нулю не только сумма всех сил, но и сумма всех моментов силы вокруг любой точки. Для 2-хмерного случая с горизонтальными и вертикальными силами: сумма сил в двух измерениях ΣH=0, ΣV=0 и момент силы в третьем измерении Στ=0.
Момент силы как функция от времени
Момент силы — производная по времени от момент импульса,
- ,
где L — момент импульса. Момент импульса твердого тела может быть описан через произведение момента инерции и угловой скорости.
- ,
То есть если I постоянная, то
- ,
где α — угловое ускорение, измеряемое в радианах в секунду за секунду.
Отношение между моментом силы и мощностью
Если сила совершает действие на каком-либо расстоянии, то она совершает механическую работу. Также если момент силы совершает действие через угловое расстояние, он совершает работу.
- = МОМЕНТ СИЛЫ * УГЛОВАЯ СКОРОСТЬ
В системе СИ мощность измеряется в Ваттах, момент силы в ньютон-метрах, а УГЛОВАЯ СКОРОСТЬ в радианах в секунду.
Отношение между моментом силы и работой
- = МОМЕНТ СИЛЫ * УГОЛ
В системе СИ работа измеряется в Джоулях, момент силы в Ньютон * метр, а УГОЛ в в радианах.
Обычно известна угловая скорость в радианах в секунду и время действия МОМЕНТА .
Тогда совершенная МОМЕНТОМ силы РАБОТА рассчитывается как:
- = МОМЕНТ СИЛЫ * *
Момент силы относительно точки
Если имеется материальная точка , к которой приложена сила , то момент силы относительно точки равен векторному произведению радиус-вектора , соединяющий точки O и OF, на вектор силы :
.
Момент силы относительно оси
Моментом силы относительно оси называется момент проекции силы на плоскость, перпендикулярную оси относительно точки пересечения оси с этой плоскостью.
Единицы измерения
Момент силы измеряется в ньютон-метрах. 1 Н•м — момент силы, который производит сила 1 Н на рычаг длиной 1 м.
Измерение момента
На сегодняшний день измерение момента силы осуществляется с помощью тензометрических, оптических и индуктивных датчиков нагрузки. В России при решении задач измерения момента в основном используется оборудование зарубежных производителей (HBM (Германия), Kyowa (Япония), Dacell (Корея) и ряда других).
См. также
Wikimedia Foundation. 2010.
dic.academic.ru
Момент силы – Лекции и примеры решения задач технической механики
Моментом силы называют вращательное усилие создаваемое вектором силы относительно другого объекта (оси, точки).
Размерность — [Н∙м] (Ньютон на метр) либо кратные значения [кН∙м]
Аналогом момента силы является момент пары сил.
Обязательным условием возникновения момента является то, что точка, относительно которой создается момент не должна лежать на линии действия силы.
Определение
Момент определяется как произведение силы F на плечо h:
M(F)=F∙h
Плечо силы h, определяется как кратчайшее расстояние от точки до линии действия силы.
Например, сила величиной 7 кН приложенная на расстоянии 35см от рассматриваемой точки дает момент M=7×0,35=2,45 кНм.
Пример момента силы
Наиболее наглядным примером момента силы может служить поворачивание гайки гаечным ключом.
Гайки заворачиваются вращением, для этого к ним прикладывается момент, но сам момент возникает при воздействии нашей силы на гаечный ключ.
Вы конечно интуитивно понимаете — для того чтобы посильнее закрутить гайку надо взяться за ключ как можно дальше от нее.
В этом случае, прикладывая ту же силу, мы получаем большую величину момента за счет увеличения её плеча (h3>h2).
Плечом при этом служит расстояние от центра гайки до точки приложения силы.
Плечо момента силы
Рассмотрим порядок определения плеча h момента:
Пусть заданы точка A и некоторая произвольная сила F, линия действия которой не проходит через эту точку. Требуется определить момент силы.
Покажем линию действия силы F (штриховая линия)
Проведем из точки A перпендикуляр h к линии действия силы
Длина отрезка h есть плечо момента силы F относительно точки A.
Момент принимается положительным, если его вращение происходит против хода часовой стрелки (как на рисунке).
Так принято для того, чтобы совпадали знаки момента и создаваемого им углового перемещения.
Примеры расчета момента силы
Сила расположена перпендикулярно оси стержня
Расстояние между точками A и B — 3 метра.
Момент силы относительно точки A:
МA=F×AB=F×3м
Сила расположена под углом к оси стержня
Момент силы относительно точки B:
MB=F×cos300×AB=F×cos300×3м
Известно расстояние от точки до линии действия силы
Момент силы относительно точки B:
MB=F×3м
См. также:
isopromat.ru
