
П, ПИ, ПИД. Основные законы регулирования
Среди множества приборов, предназначенных для коммутации, управления и выполнения других функций хочется отметить ПИД-регулятор, используемый в цепях обратной связи. Он устанавливается в системы с автоматическим управлением и поддерживает на определенном уровне значение какого-либо параметра. В большинстве случаев ПИД-регулятор участвует в регулировке температурных режимов и других величин, участвующих в различных процессах.
Общие сведения о ПИД-регуляторе
Аббревиатура ПИД происходит от английского понятия PID, и расшифровывается как Proportional, Integral, Derivative. На русском языке это сокращение включает в себя три компонента или составляющие: пропорциональную, интегрирующую, дифференцирующую.
Принцип работы ПИД-регулятора наилучшим образом подходит для контуров управления, схема которых оборудована звеньями обратной связи. В первую очередь, это различные автоматические системы где формируются сигналы управления, обеспечивающие высокое качество и точность переходных процессов.
В состав управляющего сигнала ПИД-регулятора входят три основных компонента, складывающиеся между собой. Каждый из них находится в пропорции с определенной величиной:
- Первый – с сигналом рассогласования.
- Второй – с интегралом сигнала рассогласования.
- Третий – с производной сигнала рассогласования.
Если какой-либо компонент выпадет из этого процесса, то данный регулятор уже не будет представлять собой ПИД. В этом случае его схема будет просто пропорциональной, пропорционально-дифференцирующей, пропорционально-интегрирующей.
Поскольку эти приборы чаще всего используются для поддержания заданного уровня температуры, в том числе для чайников, целесообразно ПИД-регулятор рассматривать на практических примерах именно в этом ракурсе.
В самом процессе будет участвовать объект, на котором должна поддерживаться заданная температура. Все регулировки осуществляются извне. Другой составляющей будет само устройство с микроконтроллером, которое непосредственно решает имеющуюся задачу.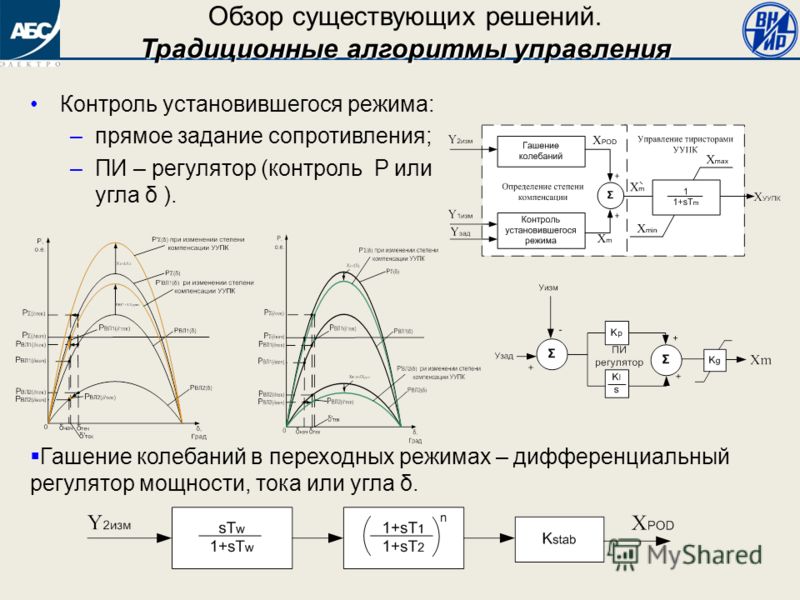
Таким образом, исходными данными служат следующие температурные показатели: текущее значение и уровень, до которого должен нагреться или остыть рассматриваемый объект. На выходе должна получиться величина мощности, передаваемой к нагревательному элементу. Именно она обеспечивает необходимый температурный режим, позволяющий выполнить поставленную задачу. Для ее решения будут задействованы все три компонента, рассмотренные выше.
Три составляющих рабочего процесса ПИД-регулятора
Формирование выходного сигнала осуществляет пропорциональная составляющая. Данный сигнал удерживает входную величину, подлежащую регулировке, на нужном уровне и не дает ей отклоняться. С повышением этого отклонения возрастает и уровень сигнала.
Если на входе регулируемая величина сравняется с заданным значением, то уровень выходного сигнала будет равен нулю. Однако на практике невозможно отрегулировать нужную величину с помощью лишь одной пропорциональной составляющей и стабилизировать ее на определенном уровне. Всегда существует вероятность статической ошибки, равной величине отклонения, поэтому стабилизация выходного сигнала останавливается на этом значении.
Данная проблема решается за счет использования второго, интегрирующего компонента. Его основным элементом является интеграл по времени, взятый от общей величины рассогласования. То есть, интегральная составляющая находится в пропорции с этим интегралом. Данный компонент способен ликвидировать статическую ошибку, так как регулятор постепенно накапливает учет статической погрешности.
Таким образом, при отсутствии внешних воздействий, через определенный период времени регулируемая величина будет приведена в стабильное состояние на отметке правильного значения.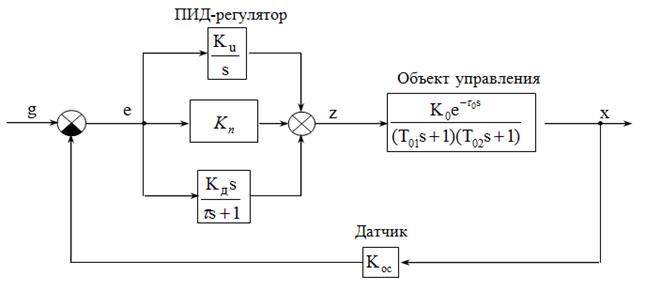 В этом случае величина пропорциональной составляющей будет нулевой, а интегрирующая полностью обеспечивает точность выходных данных. Однако и она может вызвать неточности, требующие исправления, в случае неправильного выбора коэффициента.
В этом случае величина пропорциональной составляющей будет нулевой, а интегрирующая полностью обеспечивает точность выходных данных. Однако и она может вызвать неточности, требующие исправления, в случае неправильного выбора коэффициента.
Эти отклонения устраняются за счет третьих – дифференциальных составляющих, пропорциональных с темпом изменяющегося отклонения величины. Она препятствует отклонениям, возможным в перспективе под влиянием задержек или внешних воздействий. Все три компонента дискретно связаны между собой.
Теория и практика использования ПИД-устройств
ПИД-регулятор температуры способен поддерживать заданное значение какой-то величины на протяжении определенного промежутка времени. С этой целью используется изменение напряжения и других величин, которые можно рассчитать по специальным формулам. При этом учитывается величина уставки и заданного значения, а также разница или рассогласование.
1.
2.
В идеальном варианте напряжение u задается с помощью формулы 1. В ней хорошо просматриваются коэффициенты пропорциональности ПИД-регулятора, предусмотренные для каждого компонента. На практике используется другая формула 2 с коэффициентом усиления, подходящим к любому из трех составляющих.
В ней хорошо просматриваются коэффициенты пропорциональности ПИД-регулятора, предусмотренные для каждого компонента. На практике используется другая формула 2 с коэффициентом усиления, подходящим к любому из трех составляющих.
На практике ПИД-регулирование систем в теоретическом плане анализируются довольно редко. Это связано с недостатком информации о характеристиках регулируемого объекта, нелинейностью и нестабильностью всей системы, когда невозможно использовать дифференцирующий компонент.
Рабочий диапазон устройств, функционирующих на практике, обычно ограничивается верхним и нижним пределами. В связи с нелинейностью, каждая настройка выполняется экспериментально, при подключении объекта к системе управления.
Величина, образуемая с помощью программного алгоритма управления, имеет специфические особенности. Например, для нормальной регулировки температуры может потребоваться вместо одного сразу два прибора: один будет управлять нагревом, а другой – охлаждением.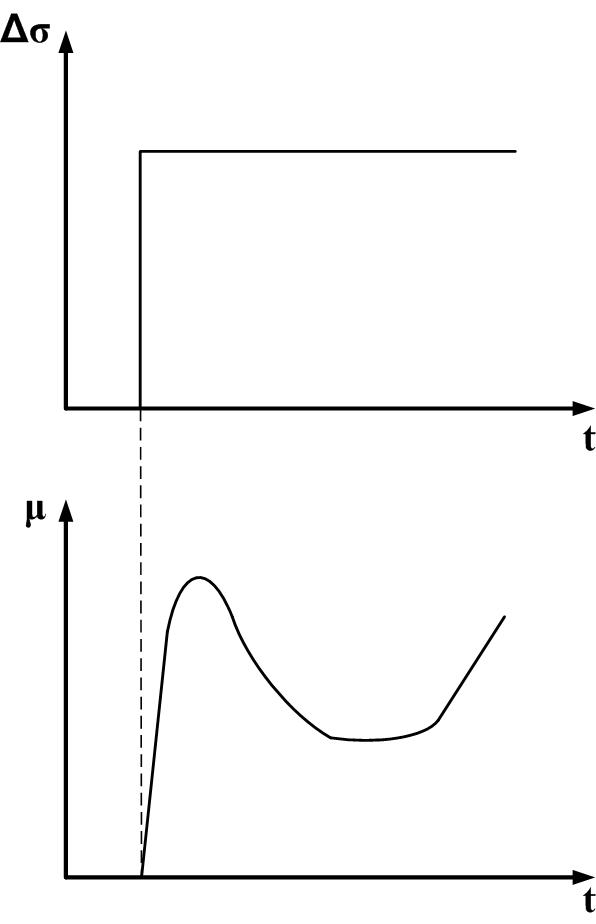 В первом случае осуществляется подача разогретого теплоносителя, а во втором – хладагента. Самым современным прибором считается цифровой ПИД-регулятор, воплотивший в своей конструкции все варианты практических регулировочных решений.
В первом случае осуществляется подача разогретого теплоносителя, а во втором – хладагента. Самым современным прибором считается цифровой ПИД-регулятор, воплотивший в своей конструкции все варианты практических регулировочных решений.
П-регулятор – Это регулятор, у которого μ пропорционально σ, т.е.μ = – Кσ.
При скачке входной величины σ на значение (–10ºС) затвор регулирующего органа переходит в новое μ – положение скачком (рис.2.10).
Рис.2.10. Закон регулирования П-регулятора.
Достоинство такого регулирования: регулирующий орган быстро перемещается на новое положение, т.е. высокая скорость регулирования (t – время).
Недостаток: имеет место остаточное отклонение, т.е. имеет место некоторая ошибка регулирования.
И-регулятор Это регулятор, у которого μ пропорционально интегралу σ
При скачке входной величины на значение (–10ºС) затвор регулирующего органа медленно переходит в новое положение (рис.2.11).
Рис.2.11.
Закон регулирования И-регулятора.
Достоинство:отсутствие остаточного отклонения регулируемого параметра от зад-го знч-я.
Недостаток: низкая скорость рег-я, т.е. затвор в новое положение перемещается медленно.
ПИ-регулятор – это параллельное соединение
предыдущих двух регуляторов (П и И – регуляторов). Этот регулятор сочетает положительные моменты П и И -регуляторов. У ПИ-регулятора (рис.2.12) регулирующее воздействие μ перемещает затвор пропорционально отклонению параметра σ и интегралу отклонения σ.Где: К, Т и – параметры настройки регулятора. Как видим, формула данного закона – это сумма двух предыдущих формул. Затвор регулирующего органа часть пути пройдет скачком по П-закону, а оставшуюся часть – медленно по И – закону.
Рис.2.12. Закон регулирования ПИ-регулятора
Регуляторы с предварением
ПД-регулятор – это такой регулятор (рис.2.13), у которого выходной сигнал μ пропорционален входному сигналу σ и производной dσ/dt, т.е..
Рис.2.13.
Закон регулирования ПД-регулятора.
Производная dσ/dt характеризует тенденцию изменения (отклонения) регулируемой величины. Величина и знак воздействия от производной позволяют регулятору
Сначала затвор скачком переходит из точки а в точку в (П – закон), т.е. больше чем надо, затем отскакивает назад в точку б (дифференциальное действие), и остаётся в этом положении.
ПИД-регулятор .
У него 3 родителя: П-регулятор, И-регулятор, ПД-регулятор. Соответственно складываются 3 формулы (рис.2.14.)
.
Здесь: К, Т и, Т д – параметры настройки, которые можно настроить вручную.
Рис.2.14. Закон регулирования ПИД-регулятора.
ПИД
– закон используется во всех контроллерах.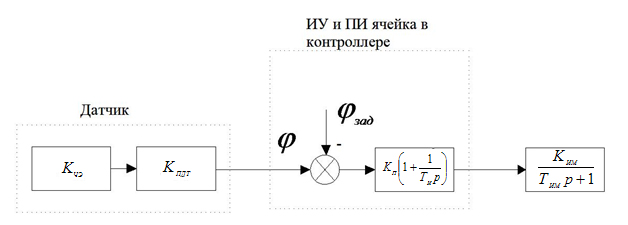
ПИД (от англ. P-proportional, I-integral, D-derivative) — регулятором называется устройство, применяемое в контурах управления, оснащенных звеном обратной связи. Данные регуляторы используют для формирования сигнала управления в автоматических системах, где необходимо достичь высоких требований к качеству и точности переходных процессов.
Управляющий сигнал ПИД-регулятора получается в результате сложения трех составляющих: первая пропорциональна величине сигнала рассогласования, вторая — интегралу сигнала рассогласования, третья — его производной. Если какой-то из этих трех компонентов не включен в процесс сложения, то регулятор будет уже не ПИД, а просто пропорциональным, пропорционально-дифференцирующим или пропорционально-интегрирующим.
Первый компонент — пропорциональный
Выходной сигнал дает пропорциональная составляющая. Сигнал этот приводит к противодействию текущему отклонению входной величины, подлежащей регулированию, от установленного значения. Чем больше отклонение — тем больше и сигнал. Когда на входе значение регулируемой величины равно заданному, то выходной сигнал становится равным нулю.
Если оставить только эту пропорциональную составляющую, и использовать только ее, то значение величины, подлежащей регулированию, не стабилизируется на правильном значении никогда. Всегда есть статическая ошибка, равная такому значению отклонения регулируемой величины, что выходной сигнал стабилизируется на этом значении.
К примеру, терморегулятор управляет мощностью нагревательного прибора. Выходной сигнал уменьшается по мере приближения требуемой температуры объекта, и сигнал управления стабилизирует мощность на уровне тепловых потерь. В итоге заданного значения температура так и не достигнет, ибо нагревательный прибор в просто должен будет быть выключен, и начнет остывать (мощность равна нулю).
Больше коэффициент усиления между входом и выходом — меньше статическая ошибка, но если коэффициент усиления (по сути — коэффициент пропорциональности) будет слишком большим, то при условии наличия задержек в системе (а они зачастую неизбежны), в ней вскоре начнутся автоколебания, а если увеличить коэффициент еще больше — система попросту утратит устойчивость.
Или пример позиционирования двигателя с редуктором. При малом коэффициенте нужное положение рабочего органа достигается слишком медленно. Увеличить коэффициент — реакция получится более быстрая. Но если увеличивать коэффициент дальше, то двигатель «перелетит» правильную позицию, и система не перейдет быстро к требуемому положению, как хотелось бы ожидать. Если теперь увеличивать коэффициент пропорциональности дальше, то начнутся осцилляции около нужной точки — результат снова не будет достигнут…
Второй компонент – интегрирующий
Интеграл по времени от величины рассогласования — есть основная часть интегрирующей составляющей. Она пропорциональна этому интегралу. Интегрирующий компонент используется как раз для исключения статической ошибки, поскольку регулятор со временем учитывает статическую погрешность.
Она пропорциональна этому интегралу. Интегрирующий компонент используется как раз для исключения статической ошибки, поскольку регулятор со временем учитывает статическую погрешность.
В отсутствие внешних возмущений, через какое-то время подлежащая регулированию величина будет стабилизирована на правильном значении, когда пропорциональная составляющая окажется равной нулю, и точность выхода будет целиком обеспечена интегрирующей составляющей. Но интегрирующая составляющая тоже может породить осцилляции около точки позиционирования, если коэффициент не подобран правильно.
Третий компонент — дифференцирующий
Темпу изменения отклонения величины, подлежащей регулированию, пропорциональна третья — дифференцирующая составляющая. Она необходима для того, чтобы противодействовать отклонениям (вызванным внешними воздействиями или задержками) от правильного положения, прогнозируемого в будущем.
Как вы уже поняли, ПИД-регуляторы применяют для поддержания заданного значения х0 некоторой одной величины, благодаря изменению значения u другой величины. Есть уставка или заданное значение х0, и есть разность или невязка (рассогласование) е = х0-х. Если система линейна и стационарна (практически это вряд ли возможно), то для задания u справедливы нижеследующие формулы:
Есть уставка или заданное значение х0, и есть разность или невязка (рассогласование) е = х0-х. Если система линейна и стационарна (практически это вряд ли возможно), то для задания u справедливы нижеследующие формулы:
В этой формуле вы видите коэффициенты пропорциональности для каждого из трех слагаемых.
Практически в ПИД-регуляторах используют для настройки другую формулу, где коэффициент усиления применен сразу ко всем компонентам:
Практическая сторона ПИД-регулирования
Практически теоретический анализ ПИД-регулируемых систем редко применяют. Сложность состоит в том, что характеристики объекта управления неизвестны, и система практически всегда нестационарна и нелинейна.
Реально работающие ПИД-регуляторы всегда имеют ограничение рабочего диапазона снизу и сверху, это принципиально объясняет их нелинейность. Настройка поэтому практически всегда и везде производится экспериментальным путем, когда объект управления подключен к системе управления.
Использование величины, формируемой программным алгоритмом управления, обладает рядом специфических нюансов. Если речь, например, о регулировке температуры, то часто требуется все же не одно, а сразу два устройства: первое управляет нагревом, второе — охлаждением. Первое подает разогретый теплоноситель, второе — хладагент. Три варианта практических решений может быть рассмотрено.
Первый — близок к теоретическому описанию, когда выход – аналоговая и непрерывная величина. Второй — выход в форме набора импульсов, например для управления шаговым двигателем. Третий — , когда выход с регулятора служит для задания ширины импульсов.
Сегодня системы автоматизации практически все строятся , и ПИД-регуляторы представляют собой специальные модули, добавляемые к управляющему контроллеру или вообще реализуемые программно путем загрузки библиотек. Для правильной настройки коэффициентов усиления в таких контроллерах, их разработчики предоставляют специальное ПО.
Андрей Повный
П, ПД, ПИ, ПИД регуляторы. Они же P, PD, PI, PID регуляторы.
Они же P, PD, PI, PID регуляторы.
Во первых, упомянем, что сами понятия П, ПД, ПИ, ПИД (P, PD, PI, PID) регуляторы являются неким сокращением от понятия: “устройство регулирования () обеспечивающие на своем выходе регулируемого параметра, или его изменения, описываемую типа П, ПИ и т.д……. “. При этом:
- П, (P) – означает “пропорциональный”
- И(I) – “интегральный”
- Д(D) – “дифференциальный”
- ПИ (PI) – “пропорциональный и интегральный”
- ПД (PD) – “пропорциональный и дифференциальный”
- ПИД (PID) – “пропорциональный, интегральный и дифференциальный”
Очень важное замечание – в подавляющем большинстве случаев эти регуляторы обеспечивают изменения регулируемого параметра на регулирующий параметр (воздействие). Для ясности в данной статье мы будем говорить о регулировании комнатной температуры (поддержании ее значения X градусов) с помощью некоего комнатного электронагревателя, выходная мощность которого зависит от уровня входного сигнала. Т.е. при изменении температуры на некую положительную величину e (при повышении температуры до уровня X+e ) к стандартному входному сигналу U нагревателя будет добавлен отрицательный сигнал регулятора u . Результирующим сигналом на входе нагревателя будет, таким образом, U-u , что уменьшит выходную мощность нагревателя, и, следовательно, комнатную температуру.
Очень часто e называют “ошибкой” или “отклонением”, Х – “заданным уровнем” или “заданным значением”, причем Х , в общем случае, может быть и регулируемым сигналом в каком-то другом контуре регулирования. ! Во избежания автоколебательных явлений желательно, чтобы “верхний” контур регулирования был “медленным” по отношению к нижнему!
Рассмотрим работу ПИД (PID) регулятора , как наиболее универсального представителя класса. Любой другой может быть получен путем обнуления коэффициента передачи при соответствующем слагаемом передаточной функции. Итак,
Передаточная функция ПИД регулятора описывается уравнением:
где “тау” – время с того момента, как изменение e регулируемой величины стало отличным от нуля (значимо отличным), а жаргон инженеров-автоматчиков еще требует нижеследующих названий для компонент уравнения и их производных величин:
- Kp – пропорциональный коэффициент усиления
- Pb=1/Kp – относительный диапазон регулирования
- Ki – интегральный коэффициент усиления
- Ti=1/Ki – постоянная интегрирования (размерность – время)
- Kd – дифференциальный коэффициент усиления
- Td=Kd – постоянная дифференицирования (размерность – время)
Очевидно, что функция содержит 3 слагаемых, первое – пропорциональное к изменению заданного параметра, второе – интегральное, а третье – дифференциальное. В дальнейшем будем использовать в рассуждениях обозначения из уравнения (2). Рассмотрим, что это такое по порядку:
Пропорциональное регулирование (П или P регуляторы) : – величина поправки в регулирующее воздействие пропорциональна величине отклонения. Логично, чем больше отклонение температуры в компате от заданного уровня, тем сильнее следует изменить мощность нагревателя для компенсации изменения. u(t)=P (коэффициенты Kd и Ki уравнения (2) равны нулю).
Интегральное регулирование: – величина поправки в регулирующее воздействие зависит от накопленного действия отклонения регулируемой величины. Спокойно, тут ничего нет сложного. Рассмотрим наш пример -если в комнате низкая температура недопустима, ибо на подоконнике находятся ценные теплолюбивые кактусы, а какой-то клоун открыл окно зимой, то пропорциональное регулирование в силу разумности своих настроек попросту не позволяет прогреть комнату. Если накопленное действие пониженной температуры растет (интеграл от изменения) , то это слагаемое даст дополнительное приращение мощности нагревателя.
Дифференциальное регулирование: – величина поправки в регулирующее воздействие зависит от скорости изменения регулируемого параметра. Тут ничего сложного нет, поскольку – если, например, температура на улице резко упала, то лучше поскорее прогреть комнату и стены, и не дать им набрать влажность. ! В гидравлических системах и в системах, имеющих собственные частоты колебаний близкие к характерным временам запуска процессов регулирования, данный вид регулирования малоприменим, так как легко вызывает гироудары или резонансы!
ПД или PD регуляторы, описать просто: Передаточная функция П (P) регулятора описывается уравнением: u(t)=P+D
ПИ или PI регуляторы описываются тоже просто: Передаточная функция П (P) регулятора описывается уравнением: u(t)=P+I (коэффициент Ki уравнения (2) равен нулю).
Уравнение (2), для целей упрощения настройки часто может быть записано как:
тут нет никакого подвоха, все то же самое, просто другая запись.
ПИД-регулятор. Описание и принцип работы.
Сегодняшняя статья будет посвящена такой замечательной вещи, как ПИД-регулятор. По определению, пропорционально-интегрально-дифференциальный регулятор — устройство в цепи обратной связи, используемое в системах автоматического управления для поддержания заданного значения измеряемого параметра. Чаще всего можно встретить примеры, где ПИД-регулятор используется для регулировки температуры, и, на мой взгляд, этот пример прекрасно подходит для изучения теории и понимания принципа работы регулятора. Поэтому именно задачу регулировки температуры и будем сегодня рассматривать.
Итак, что у нас имеется?
Во-первых, объект, температуру которого необходимо поддерживать на заданном уровне, кроме того, эту температуру необходимо регулировать извне. Во-вторых, наше устройство на базе микроконтроллера, с помощью которого мы и будем решать поставленную задачу. Кроме того, у нас есть измеритель температуры (он сообщит контроллеру текущую температуру) и какое-нибудь устройство для управления мощностью нагревателя. Ну и поскольку необходимо как-то задавать температуру, подключим микроконтроллер к ПК.
Таким образом, у нас есть входные данные:
- текущая температура,
- температура, до которой необходимо нагреть/остудить объект.
А на выходе мы должны получить значение мощности, которое необходимо передать на нагревательный элемент. И для такой задачи, да и вообще любой похожей задачи, отличным решением будет использование пропорционально-интегрально-дифференциального регулятора 🙂
Начнем с пропорциональной составляющей. Здесь все просто, берем значение нужной нам температуры (уставку) и вычитаем из него значение текущей температуры. Получаем рассогласование (невязку). Умножаем полученную невязку на коэффициент и получаем значение мощности, которое и передаем на нагреватель. Вот и все!
Но при использовании только пропорциональной составляющей есть два больших минуса. Во-первых, эффект от нашего воздействия наступает не моментально, а с запаздыванием. И, во-вторых, пропорциональная составляющая никак не учитывает воздействие окружающей среды на объект.
Например, когда мы добились того, чтобы температуры объекта была равна нужному нам значению, невязка стала равна нулю. А вместе с ней и выдаваемая мощность стала нулевой. Но температура не может просто так оставаться постоянной, поскольку происходит теплообмен с окружающей средой и объект охлаждается. Таким образом, при использовании только пропорциональной составляющей температура будет колебаться около нужного нам значения.
Давайте разбираться, как ПИД-регулятор решает две выявленные проблемы.
Для решения первой используется дифференциальная составляющая. Она противодействует предполагаемым отклонениям регулируемой величины, которые могут произойти в будущем. Каким образом? Сейчас разберемся!
Итак, пусть у нас текущая температура меньше нужного нам значения. Пропорциональная составляющая начинает выдавать мощность и нагревать объект. Дифференциальная составляющая вносит свой вклад в мощность и представляет из себя производную невязки, взятую также с определенным коэффициентом. Температура растет и приближается к нужному значению, а следовательно невязка в предыдущий момент больше текущего значения невязки, а производная отрицательная. Таким образом, дифференциальная составляющая начинает постепенно снижать мощность до того, как температура достигла необходимого значения.
С этим вроде разобрались, вспоминаем про вторую проблему регулятора 🙂
А с ней нам поможет справиться интегральная составляющая. Как нам в программе получить интеграл? А легко — просто суммированием (накоплением) значений невязки, на то он и интеграл! Возвращаемся к нашему примеру. Температура ниже значения уставки, начинаем подогревать. Пока мы нагреваем, значение невязки положительное и накапливается в интегральной составляющей. Когда температура «дошла» до нужного нам значения, пропорциональная и дифференциальная составляющая стали равны нулю, а интегральная перестала изменяться, но ее значение не стало равным нулю.
Таким образом, благодаря накопленному интегралу мы продолжаем выдавать мощность и нагреватель поддерживает нужную нам температуру, не давая объекту охлаждаться. Вот так вот просто и эффективно 🙂
В итоге мы получаем следующую формулу ПИД-регулятора:
Тут u(t) — искомое выходное воздействие, а e(t) — значение невязки. Частенько формулу преображают к следующему виду, но суть от этого не меняется:
Пожалуй, на этом закончим, разобрались мы сегодня как работает ПИД-регулятор, а в ближайшее время разберемся еще и как произвести настройку коэффициентов ПИД-регулятора!
Рекомендации по настройке ПИД-регуляторов в контроллере АГАВА 6432.20 — ООО КБ АГАВА
Введение
1. Согласно теории автоматического регулирования параметры регулятора однозначно связаны с характеристиками объекта регулирования. Поскольку изготовитель автоматики не имеет информации об этих характеристиках, заводские настройки контроллера выбраны для некого абстрактного объекта, и задача наладчика состоит в том, чтобы подобрать оптимальные параметры регулятора для конкретного котла или печи.
Ниже приведены две методики настройки ПИД-регулятора:
Методика №1 – параметры объекта оцениваются в процессе самой настройки;
Методика №2 – параметры объекта определяются путем анализа переходной характеристики.
2. В программе контроллера АГАВА 6432.20 (с версии 08.30) реализованы два независимых алгоритма регулирования:
1) позиционный ПИД-регулятор для исполнительного механизма (ИМ) с аналоговым управлением (например, ЧРП):
2) скоростной ПИД-регулятор для ИМ типа МЭО:
где:
outn – выходной сигнал ПИД регулятора от 0 до 100% значения тока, выдаваемое на исполнительный механизм, в текущем периоде регулирования;
Kp – коэффициент пропорциональности;
Kd – коэффициент дифференцирования, с;
Ki – коэффициент интегрирования, с;
En – текущее значение ошибки (от -100 до 100 %),
En-1 –значение ошибки в предыдущем периоде регулирования (от -100 до 100 %),
En-2 –значение ошибки на n-2 шаге (от -100 до 100 %).
T – период регулирования, с.
Примечание. Длительность импульса, выдаваемая на исполнительный механизм типа МЭО в скоростном ПИД-регуляторе равна:
где:
tn – длительность управляющего импульса на МЭО
yn – рассчитанная длительность текущего импульса, %;
Тмэо – время полного хода исполнительного механизма, с;
МЕТОДИКА №1
Суть предлагаемой методики заключается в том, что параметры объекта непосредственно не определяются, а в скрытой форме оцениваются в процессе самой настройки, когда контур регулирования уже замкнут, но ещё не настроен.
ВНИМАНИЕ!!!
Настройку параметров регулирования следует производить после наладки режимов горения и соотношения топливо/воздух. Указанные операции осуществляют при отключенных регуляторах.
Последовательность настройки
Определяют значение Tmeo. Для этого при помощи секундомера замеряют время хода исполнительного механизма в зоне регулирования;
Примечание. для ЧРП допускается время хода взять равным “Времени разгона ЧРП” из настроек ЧРП.
Рассчитывают значение периода регулирования, исходя из соотношения: Т=(0,05÷0,1)Тmeo
В соответствующих пунктах меню настроек контроллера устанавливают рассчитанное и измеренное значения T и Tmeo.
Примечание. Для ЧРП устанавливают только T.
Переводят выбранный контур в режим П-регулятора, для чего отключают интегральную и дифференциальную компоненты, т.е. устанавливают значение Ti максимально возможным, а значение Td – минимально возможным.
Контур регулирования выводят на границу устойчивости. Для этого постепенно увеличивают коэффициент пропорциональности Kp до критического значения (Kp крит), при котором контур войдет в режим колебаний (см. рис. 1).
Рис.1Определяют период колебаний Tк и критическое значение Kp крит. Далее, по приведённым ниже формулам, рассчитывают требуемые значения параметров:
для П-регулятора: Kp = 0,5 Kp крит;
для ПИ-регулятора: Kp = 0,45 Kp крит и Ti = 0,83Tк;
для ПИД-регулятора: Kp = 0,60 Kp крит, Ti = 0,50Tк и Td = 0,125Tк.
Замечания, касающиеся выбора значения T:
- Увеличение периода регулирования T по отношению к Tmeo (п.2) приводит к росту динамической ошибки. С другой стороны, чрезмерно заниженное абсолютное значение T не позволяет минимизировать величину статической ошибки.
- Если расчетное значение T (п.2) получилось слишком малым необходимо применить более медленный исполнительный механизм, или изменить размеры сопрягающих рычагов.
МЕТОДИКА №2
В основе данной методики лежит анализ переходной характеристики (Рис 1).
Сигнал, вырабатываемый ПИД-регулятором, определяется тремя компонентами:
ВНИМАНИЕ!!!
Настройку параметров регулирования следует производить после наладки режимов горения и соотношения топливо/воздух. Указанные операции осуществляют при отключенных регуляторах.
Этап 1. Настройка пропорциональной компоненты ПИД-регулятора
Перед настройкой пропорциональной компоненты регулятора интегральная и дифференциальная компоненты отключаются, либо значение Ki устанавливается максимально возможным, а значение Kd – минимально возможным.
Устанавливают первоначальное значение коэффициента пропорциональности Kp, Tmeo, T, руководствуясь “Рекомендациями по настройке ПИД-регуляторов в контроллере “АГАВА 6432.20” или используя заводские настройки контроллера.
Экспериментально снимается (если это допустимо по технологическим условиям) и регистрируется при помощи программы ” АГАВА РТ ” характеристика переходного процесса.
Возможные варианты кривых переходной характеристики приведены на рис.2.
Рис.2
Переходная характеристика 1
Значение коэффициента пропорциональности очень велико, переходная характеристика (а значит, и настройка регулятора) далека от оптимальной. Коэффициент пропорциональности следует уменьшить. При этом надо иметь в виду, что варьировать пропорциональную компоненту можно двумя переменными: в явном виде, изменяя Kp и подбирая период регулирования T. Исходное значение T рассчитывают по формуле:
Т=(0,05÷0,1)Тmeo
Переходная характеристика 2
Для этой кривой характерны затухающие колебания (3-5 периодов). Если в дальнейшем предполагается использовать и дифференциальную компоненту ПИД-регулятора, то выбранное значение коэффициента пропорциональности является оптимальным. Для этого случая настройка пропорциональной компоненты считается законченной.
Если дифференциальная компонента использоваться не будет, то рекомендуется еще уменьшить Kp так, чтобы получились переходные характеристики типа 3 или 4.
Переходная характеристика 3
В этой переходной характеристике имеет место небольшой выброс и быстро затухающие колебания (1-2 периода). Этот тип переходной характеристики обеспечивает хорошее быстродействие и быстрый выход на заданную температуру. В большинстве случаев его можно считать оптимальным, если в системе допускаются выбросы при переходе с одной уставки на другую или при резком изменении нагрузок, например, при изменении расхода пара.
Выбросы можно устранить дополнительным уменьшением Kp так, чтобы получилась переходная характеристика типа 4.
Переходная характеристика 4
Регулируемый параметр плавно подходит к установившемуся значению без выбросов и колебаний. Эта тип переходной характеристики также можно считать оптимальным, однако быстродействие регулятора несколько снижено.
Переходная характеристика 5
Сильно затянутый подход к установившемуся значению говорит о том, что коэффициент пропорциональности чрезмерно занижен. Динамическая и статическая точность регулирования здесь мала. Рекомендуется увеличить значение Kp.
Следует обратить внимание на два обстоятельства. Во-первых, во всех рассмотренных выше случаях установившееся значение параметра в системе не совпадает со значением уставки. Чем меньше коэффициент пропорциональности, тем больше остаточное рассогласование.
Во-вторых, чем меньше коэффициент пропорциональности, тем больше длительность переходных процессов.
Однако остаточное рассогласование, характерное для чисто пропорциональных регуляторов (П-регуляторов), минимизируется интегральной компонентой регулятора (ПИ-регулятор).
Выводы:
- Во всех рассмотренных выше случаях установившееся значение параметра в системе не совпадает со значением уставки. Чем меньше коэффициент пропорциональности, тем больше остаточное рассогласование.
- Чем меньше коэффициент пропорциональности, тем больше длительность переходных процессов.
- Остаточное рассогласование, характерное для чисто пропорциональных регуляторов (П-регуляторов), минимизируется интегральной компонентой регулятора (ПИ-регулятор).
Этап 2. Настройка коэффициента дифференцирования Кd
Рис.3
- Этот этап присутствует только в том случае, если применяется полнофункциональный ПИД-регулятор. Если дифференциальная компонента применяться не будет (используется ПИ-регулятор), то следует сразу перейти к этапу 3 (Настройка интегральной компоненты Кi).
- Устанавливают первоначальное значение Кd. При этом можно использовать «Рекомендации по настройке ПИД-регуляторов в контроллере “АГАВА 6432.20” или применить заводские настройки контроллера.
- Предположим, что на этапе 1 установлен коэффициент пропорциональности, соответствующий переходной характеристике типа 1 показанной на рис.3, в которой присутствуют затухающие колебания. В этом случае следует выбрать такое значение Кd, чтобы переходная характеристика имела вид кривой 2 на рис.3. В качестве первого приближения, постоянную времени дифференцирования можно рассчитать по формуле:
Кd = 0,2 x Tk
где Tk – период колебания (Рис.1).
Вывод: Дифференциальная компонента устраняет затухающие колебания и делает переходную характеристику, похожей на тип 2 (см. рис.3). Это значит, что динамическая точность регулирования при наличии дифференциальной компоненты (ПД-регулятор) может быть выше, чем для П-регулятора.
Этап 3. Настройка величины коэффициента интегрирования Кi
После настройки пропорциональной и, при необходимости и дифференциальной компоненты, получается переходная характеристика 1, показанная на рис 4.
Рис.4
- Начальное значение постоянной времени интегрирования следует установить, руководствуясь “Рекомендациями по настройке ПИД-регуляторов в контроллере “АГАВА 6432.20” или используя заводские настройки контроллера.
- Возможные варианты кривых приведены на рис.4.
Переходная характеристика 1
Значение Кi выбрано слишком большим, следует уменьшить значение коэффициента интегрирования Кi.
Переходная характеристика 2
Такая кривая получается при чрезмерно большой величине коэффициента интегрирования. Выход на уставку оказывается затянутым и длится примерно (3…4) х Кi. В этом случае рекомендуется уменьшить значение коэффициента интегрирования Кi.
Переходная характеристика 4
Получается при слишком малой величине коэффициента интегрирования. Выход на уставку также длится (3…4) x Кi. Если коэффициента интегрирования уменьшить еще, то в системе могут возникнуть колебания. Следует увеличить значение коэффициента интегрирования Кi.
Переходная характеристика 3
Значение коэффициента интегрирования Кi выбрано оптимально.
Выводы: Интегральная компонента позволяет минимизировать остаточное рассогласование между установившимся в системе значением регулируемого параметра и уставкой.
Практические советы по настройке ПИД-регулятора
В данной статье приведены основные принципы и правила настройки коэффициентов ПИД-регулятора сточки зрения практического применения. Теоретические основы можно прочитать вот в этой статье.
Для простоты изложения рассмотрим настройку регулятора на примере. Допустим, необходимо поддерживать температуру в помещении с помощью обогревателя, управляемого регулятором. Для измерения текущей температуры используем термопару.
Задача настройкиНастройка регулятора производится с одной единственной целью: подобрать его коэффициенты для данной задачи таким образом, чтобы регулятор поддерживал величину физического параметра на заданном уровне. В нашем примере физическая величина — это температура.
Допустим текущая температура в помещении 10 °С, а мы хотим, чтобы было 25°С. Мы включаем регулятор и он начинает управлять мощностью обогревателя таким образом, чтобы температура достигла требуемого уровня. Посмотрим как это может выглядеть.
На данном рисунке красным цветом показана идеальная кривая изменения температуры в помещении при работе регулятора. Физическая величина плавно, без скачков, но в тоже время достаточно быстро подходит к заданному значению. Оптимальное время, за которое температура может достигнуть заданной отметки, определить довольно сложно. Оно зависит от многих параметров: размеров комнаты, мощности обогревателя и др. В теории это время можно рассчитать, но на практике чаще всего это определяется экспериментально.
Чёрным цветом показан график изменения температуры в том случае, если коэффициенты подобраны совсем плохо. Система теряет устойчивость. Регулятор при этом идёт «в разнос» и температура «уходит» от заданного значения.
Рассмотрим более благоприятные случаи.
На этом рисунке показаны графики, далёкие от идеального. В первом случае наблюдается сильное перерегулирование: температура слишком долго «скачет» относительно уставки, прежде чем достичь её. Во втором случае регулирование происходит плавно, но слишком медленно.
А вот и приемлемые кривые:
Данные кривые тоже не идеальны, но могут быть сочтены за удовлетворительные.
В процессе настройки регулятора, пользователю необходимо стремиться получить кривую, близкую к идеальной. Однако, в реальных условиях сделать это не так-то просто — приходится долго и мучительно подбирать коэффициенты. Поэтому зачастую останавливаются на «приемлемой» кривой регулирования. Например, в нашем примере нас могли бы устроить коэффициенты регулятора, при которых заданная температура достигалась бы за 15-20 минут с максимальным перерегулированием (максимальными «скачками» температуры) 2 °С. А вот время достижение уставки более часа и максимальные «скачки» температуры 5 °С — нас бы не устроили.
Далее поговорим о том, как подобрать коэффициенты для достижения оптимального регулирования. Рекомендуется настраивать коэффициенты в том же порядке, в котором это описано.
Настраиваем пропорциональный коэффициентВыставляем дифференциальный и интегральный коэффициенты в ноль, тем самым убирая соответствующие составляющие. Пропорциональный коэффициент выставляем в 1.
Далее нужно задать значение уставки температуры отличное от текущей и посмотреть, как регулятор будет менять мощность обогревателя, чтобы достичь заданного значения. Характер изменения можно отследить «визуально», если у вас получится мысленно представить этот график. Либо можно регистрировать в таблицу измеренное значение температуры каждые 5-10 секунд и по полученным значением построить график. Затем нужно проанализировать полученную зависимость в соответствии с рисунком:
При большом перерегулировании, необходимо уменьшать пропорциональный коэффициент, а если регулятор долго достигает уставки — увеличивать. Так убавляя-прибавляя коэффициент необходимо получить график регулирования как можно ближе к идеальному. Поскольку достичь идеала удастся вряд ли, лучше оставить небольшое перерегулирование (его можно будет скорректировать другими коэффициентами), чем длительное нарастание графика.
Настраиваем дифференциальный коэффициентПостепенно увеличивая дифференциальную составляющую, необходимо добиться уменьшения или полного исчезновения «скачков» графика (перерегулирования) перед выходом на уставку. При этом кривая должна стать еще больше похожа на идеальную. Если слишком сильно завысить дифференциальный коэффициент, температура при выходе на уставку будет расти не плавно, а скачками (как показано на рисунке).
При появлении таких скачков необходимо прекратить увеличение дифференциального коэффициента.
Настраиваем интегральный коэффициентПри настройке двух предыдущих коэффициентов можно получить практически идеальную кривую регулирования или близкую к ней кривую, удовлетворяющую условиям задачи. Однако, как правило возникает так называемая «статическая ошибка». При этом в нашем примере температура стабилизируется не на заданном значении 25 °С, а на несколько меньшем значении. Дело в том, что если температура станет равной уставке (то есть разность текущей и заданной температур станет равна 0), то пропорциональная и дифференциальная составляющая будут равны нулю (см. функцию преобразования ПИД-регулятора). При этом мощность регулятора тоже станет равна 0 и он начнёт остывать.
Для того чтобы исключить этот эффект, используют интегральную составляющую. Её необходимо постепенно увеличивать до исчезновение статической ошибки. Однако, чрезмерное её увеличение тоже может привести к возникновению скачков температуры.
ЗаключениеНастройка ПИД-регулятора довольно сложный и трудоёмкий процесс. На практике достаточно тяжело достичь оптимального регулирования и зачастую в этом нет необходимости. Чаще всего достаточно добиться такого вида переходного процесса, который устроит пользователя в условиях текущей задачи.
ПИД-регулятор в преобразователях частоты ABB серии ACS355
11.07.2017
Тематика: Полезная информация
Введение
Преобразователи частоты ABB серии ACS355 оснащены встроенным ПИД-регулятором («ПИД-регулятор» расшифровывается как «пропорционально-интегрально-дифференциальный регулятор»).
Основные примеры применения ПИД-регулятора в преобразователе частоты – это процессы поддержания заданного давления в водяной магистрали, температуры воздуха в конденсаторе охлаждения, давления воздуха компрессора и пр.
Компания Овердрайв-Электро предлагает частотно-регулируемые приводы ABB со склада в Минске:
Что такое ПИД-регулятор в преобразователе частоты?
ПИД-регулятор является одним из основных узлов замкнутой системы регулирования: давления, расхода, уровня, скорости, положения, температуры и т.д., и используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимой точности и должного качества переходного процесса регулирования.
Рис.1. Условная схема ПИД-регулятора в преобразователе частоты ACS355 ABB.
ПИД-регулятор преобразователя частоты условно имеет два входа (см. рис. 1).
На первый вход подается сигнал задания величины параметра технологического процесса, например, необходимая величина давления или температуры. Этот сигнал задания часто называют «уставкой».
На второй вход ПИД-регулятора преобразователя частоты поступает сигнал обратной связи (например, сигнал 4..20mA от пропорционального датчика давления).
В зависимости от величины и знака рассогласования между этими сигналами на выходе ПИД-регулятора, формируется сигнал, который изменяет выходную частоту преобразователя таким образом, чтобы заданное значение технологического параметра (например, давление в трубопроводе) поддерживалось с заданной точностью и с заданным качеством.
Объяснение принципа работы ПИД-регулятора простым языком выглядит следующим образом. Например, необходимо регулировать давление в водопроводе при помощи насоса с преобразователем частоты и пропорционального датчика обратной связи по давлению.
Если давление в водопроводе будет меньшим, чем уставка, то ПИД-регулятор сформирует выходной сигнал для увеличения выходной частоты преобразователя. Это приведёт к увеличению производительности (расхода) насоса и давление в водопроводе начнет увеличиваться.
Если давление в водопроводе будет больше величины, установленной заданием (уставки), то ПИД-регулятор сформирует управляющий сигнал на уменьшение выходной частоты преобразователя и давление в трубопроводе уменьшится.
Принципы ПИД-регулирования в преобразователях частоты
Выходной сигнал ПИД-регулятора преобразователя частоты представляет собой управляющий сигнал, являющийся суммой трёх слагаемых (составляющих):
- Пропорциональная составляющая (П) – пропорциональна разности входного сигнала и сигнала обратной связи (сигнал рассогласования).
- Интегральная составляющая (И) — интеграл сигнала рассогласования.
- Дифференциальная составляющая (Д) — производная сигнала рассогласования.
Пропорциональная составляющая (П) – это рассогласование между величиной уставки и сигналом обратной связи. При использовании только пропорциональной составляющей всегда будет иметь место статическая ошибка. Например, в замкнутой системе поддержания давления в системе водоснабжения реальное давление будет меньше заданного. Для того, чтобы уменьшить статическую ошибку необходимо увеличить коэффициент усиления П-регулятора (пропорциональной составляющей).
Чрезмерное увеличение коэффициента усиления пропорциональной составляющей ПИД-регулятора преобразователя частоты приводит к автоколебаниям и к неустойчивой работе замкнутой системы регулирования. Поэтому, на практике поступают так: увеличивают коэффициент усиления пропорциональной составляющей (П) до появления автоколебаний, и после этого, уменьшают этот коэффициент на 20 – 30%.
Для устранения статической ошибки изменяют интегральную (И) составляющую ПИД-регулятора. Таким образом, изменяя время интегрирования, получают требуемую точность и качество регулирования.
Дифференциальная составляющая (Д) используется редко – обычно, только в высоко динамичных системах регулирования скорости, положения, синхронизации и т.д.
В целом, для настройки ПИД-регулятора не требуется отличного понимания формальной теории управления системами. При этом использование ПИД-регулятора позволяет решить около 90% всех задач управления простыми системами замкнутого цикла.
Применение преобразователей частоты ACS355 с ПИД-регулятором в водоснабжении
На рис.2 и рис.3 приведены условные блок-схемы систем регулирования давления воды в водоснабжении с использованием преобразователей частоты ABB серии ACS355.
Рис.2. Условная блок-схема системы регулирования давления воды в водоснабжении.
Рис.3. Пример применения ПИД-регулятора на базе ПЧ ACS355 в водоснабжении.
(ПИД-регулятор контролирует скорость вращения насоса подкачки, в зависимости от измеренного и заданного давления.)
Преобразователи частоты ABB серии ACS355
Преобразователи частоты ABB серии ACS355 – оптимальный выбор по соотношению «цена-качество» для решения задач с ПИД-регулированием. Общий вид приводов ACS355 показан на рис.4.
Частотные приводы ACS355 обладают широким набором параметров и возможностей. Настроить необходимый режим работы возможно как с панели управления преобразователем, так и при помощи персонального компьютера, посредством специализированного программного обеспечения DriveWindow Light.
Рис.4. Преобразователи частоты ABB серии ACS355 с базовой панелью управления.
В данной статье, для примера, рассмотрен вариант настройки ПИД-регулятора преобразователя ACS355 при помощи панели управления.
Панель управления к частотному приводу ACS355 предлагается в двух вариантах исполнения: базовая панель и интеллектуальная панель управления (см. рис.5).
Рис.5. Варианты панелей управления к преобразователям частоты ABB серии ACS355.
Интеллектуальная панель управления частотным приводом ACS355 имеет встроенный мастер запуска (настройки) и интерактивную справку. С помощью этих инструментов настройку преобразователя частоты ACS355 на режим ПИД-регулирования можно выполнить без особых временных затрат и не пользуясь руководством по эксплуатации.
При использовании базовой панели управления встроенных удобных инструментов, указанных выше, нет.
Настройка ПИД-регулятора в преобразователе ACS355
Для простоты настройки режима ПИД-регулирования в преобразователе частоты ACS355 (с базовой или интеллектуальной панелью управления) ниже изложен минимально необходимый перечень параметров, на которые необходимо обратить внимание (см. таблицу 1).
Таблица 1: Список параметров для настройки режима ПИД-регулирования в преобразователе частоты ACS355
| Номер и название параметра | Описание функции параметра | Значение параметра | Описание выбранного значения параметра |
| Выбор макроса ПИД-регулятор | |||
| 9902 ПРИКЛ. МАКРОС | Выбирает прикладной макрос | 6 (ПИД-РЕГУЛЯТ) | ПИД-регулирование. Для приложений, в которых привод регулирует параметр технологического процесса. |
| Переходим на внешний 2 (ЦВ1 – автоматический режим) | |||
| 1002 КОМАНДЫ ВНЕШН. 2 | Определяет способ подключения и источник команд пуска, останова и направления вращения для внешнего устройства управления 2 (ВНЕШНИЙ2) | 1 (ЦВХ1) | Команды пуска и останова подаются через цифровой вход 1 (0 = останов, 1= пуск). Направление вращения фиксируется в соответствии с параметром 1003 НАПРАВЛЕНИЕ (установка ВПЕРЕД, НАЗАД= ВПЕРЕД) |
| Управление по каналу Внешний 2 (там есть ПИД) | |||
| 1102 ВЫБОР ВНЕШН. 1/2 | Определяет источник, с которого привод считывает сигнал, выбирается одно из двух внешних устройств управления (ВНЕШНИЙ1 или ВНЕШНИЙ2). | 7 (ВНЕШНИЙ2) | Активно внешнее устройство управления 2. Источники управляющих сигналов определяются параметрами 1002 КОМАНДЫ ВНЕШН. 2 и 1106 ИСТОЧН. ЗАДАНИЯ 2. |
| Выход ПИД1 подключаем в работу | |||
| 1106 ИСТОЧН. ЗАДАНИЯ2 | Выбор источника сигнала для внешнего задания 2 (ЗАДАНИЕ2) | 19 (ВЫХ. ПИД1) | Выход регулятора ПИД1 См. группы параметров 40 ПИД РЕГУЛЯТОР1 и 41 ПИД РЕГУЛЯТОР2 |
| Выбор направления вращения | |||
| 1003 НАПРАВЛЕНИЕ | Разрешает управление направлением вращения двигателя или фиксирует направление | 1 (ВПЕРЕД) | Направление вращения – только вперед |
| Разрешение на запуск привода | |||
| 1601 РАЗРЕШЕНИЕ РАБОТЫ | Выбирает источник внешнего сигнала разрешения работы. | 0 (НЕ ВЫБРАН) | Позволяет запуск привода без внешнего сигнала разрешения работы. |
| Запуск без намагничивания постоянным током | |||
| 2101 РЕЖИМ ПУСКА | Выбор способа пуска двигателя | 1 (АВТОМАТ) | Привод запускает двигатель сразу же с нулевой частоты, если для параметра 9904 РЕЖИМ УПР.ДВИГ. установлено значение СКАЛЯР: ЧАСТ. Если требуется пуск на ходу, выберите ПУСК СКАН. Если для параметра 9904 РЕЖИМ УПР.ДВИГ. установлено значение ВЕКТОР: СКОРОСТЬ или ВЕКТОР: МОМЕНТ, перед пуском привод предварительно намагничивает двигатель постоянным током. Время предварительного намагничивания определяется значением параметра 2103 ВРЕМЯ ПОДМАГНИЧ. См. значение НАМАГН.ПТ. |
| Выбор режима останова | |||
| 2102 РЕЖИМ ОСТАНОВА | Выбор режима останова двигателя | 1 (ВЫБЕГ) | Останов двигателя путем отключения питания. Двигатель вращается по инерции до остановки. |
| Выбираем единицы измерения и формат отображения | |||
| 4006 ЕДИНИЦЫ ИЗМЕР | Выбирает единицу измерения для текущих значений (регулируемой величины) ПИД-регулятора. | 4 (%) | процент |
| 22 (бар) | бар | ||
| 40(куб.м/мин) | кубометр в минуту | ||
| 4007 ПОЛОЖ.ДЕС. ТОЧКИ | Определяет положение десятичной точки для регулируемых ПИД регулятором величин. | 1 | |
| 4008 ЗНАЧЕНИЕ 0% | Вместе с параметром 4009 ЗНАЧЕНИЕ 100 % определяет масштабирование регулируемых ПИД регулятором величин. | ||
| 4009 ЗНАЧЕНИЕ 100% | Вместе с параметром 4008 ЗНАЧЕНИЕ 0% определяет масштабирование регулируемых ПИД-регулятором величин. | ||
| Выбор сигнала уставки | |||
| 4010 ВЫБОР УСТАВКИ | Определяет источник сигнала задания для ПИД-регулятора технологического процесса. | 0 (ПАНЕЛЬ УПРАВ) | Панель управления |
| 1 (AI1) | Аналоговый вход АВХ1 | ||
| 2 (AI2) | Аналоговый вход АВХ2 | ||
| 19(ВНУТРЕННИЙ) | Фиксированное значение, определяемое параметром 4011 ВНУТР. УСТАВКА. | ||
| 4011 ВНУТР. УСТАВКА | Выбирает фиксированное значение в качестве задания ПИД-регулятора процесса, когда параметр 4010 ВЫБОР УСТАВКИ установлен на ВНУТРЕННИЙ. | 40 | Значение этого пункта необходимо изменять в случае, когда параметр 4011 равен 19 и устанавливать необходимое для технологического процесса значение. |
| 1 (AI1) | Аналоговый вход АВХ1 | ||
| 2 (AI2) | Аналоговый вход АВХ2 | ||
| 19(ВНУТРЕННИЙ) | Фиксированное значение, определяемое параметром 4011 ВНУТР. УСТАВКА. | ||
| 1107 МИН. ЗАДАНИЯ2 | Определяет минимальную величину внешнего задания 2 (ЗАДАНИЕ2). Соответствует минимальной установке для используемого источника сигнала. | 0,00% | |
| 1108 МАКС. ЗАДАНИЯ2 | Определяет максимальную величину внешнего задания2 (ЗАДАНИЕ2). Соответствует максимальной установке для используемого источника сигнала. | 100,00% | |
| Выбор сигнала ОС | |||
| 4016 ВХОД СИГН.1 | Определяет источник действительной величины 1 (СИГН.1). См. также параметр 4018 СИГН.1 МИН | 2 (АВХ2) | Используется аналоговый вход АВХ2 для СИГН.1 |
| Инвертирование сигнала ОС | |||
| 4005 ИНВЕРТ. ОШИБКИ | Выбирается зависимость между сигналом обратной связи и скоростью привода. | 0 (НЕТ) | Прямая зависимость: уменьшение сигнала обратной связи приводит к увеличению скорости привода. Ошибка= Задание- Обратная связь |
| Настройки ПИД-регулятора | |||
| 4001 КОЭФ. УСИЛЕНИЯ | Определяет коэффициент усиления ПИД-регулятора технологического процесса. | 1 | Этот параметр настройки ПИД-регулятора подбирается для каждой системы индивидуально при наладке. |
| 4002 ВРЕМЯ ИНТЕГРИР | Определяет время интегрирования ПИД-регулятора1 технологического процесса. | 10,0с | Этот параметр настройки ПИД-регулятора подбирается для каждой системы индивидуально при наладке. |
| 4003 ВРЕМЯ ДИФФЕРЕНЦ | Определяет время дифференцирования ПИД-регулятора технологического процесса. | 0 | Этот параметр настройки ПИД-регулятора подбирается для каждой системы индивидуально при наладке. |
| Параметры управления | |||
| 2202 ВРЕМЯ УСКОР. 1 | Определяет время ускорения1 | 5,0 с | |
| 2203 ВРЕМЯ ЗАМЕДЛ. 1 | Определяет время замедления1 | 5,0 с | |
Данный базовый набор параметров позволяет запустить преобразователь частоты ABB серии ACS355 в режиме ПИД-регулирования в общем случае. Изучив руководство по эксплуатации, пользователь может выполнить более тонкую настройку, оптимально подходящую для конкретного применения.
Руководство по эксплуатации на русском языке в печатном виде поставляется вместе с преобразователем частоты ACS355 в одной коробке. Также руководство на русском языке можно скачать в электронном варианте здесь.
Блок-схема настройки ПИД-регулятора ПЧ ACS355
Блок-схема настройки регулятора технологического процесса PID1 (ПИД-регулятора) преобразователя частоты ABB серии ACS355 показана на рис.6.
Рис.6. Блок-схема настройки регулятора технологического процесса PID1 (ПИД-регулятора) в преобразователях частоты ABB серии ACS355.
На блок-схеме указаны номера параметров и номера групп параметров из руководства по эксплуатации преобразователя частоты.
Выводы
Преобразователи частоты ABB серии ACS355 имеют удобную настройку ПИД-регулятора (мастер запуска) и интерактивную русскоязычную справку. Это позволяет адаптировать преобразователь под широкий спектр задач и быстро ввести привод в эксплуатацию. Возможность настройки преобразователя частоты, как через панель управления, так и при помощи компьютера, добавляет гибкости и удобства в использовании ПЧ ACS355.
РадиоКот :: ПИ регулятор температуры
РадиоКот >Схемы >Цифровые устройства >Автоматика >ПИ регулятор температуры
Началось все с необходимости в создании сушилки для плат с нанесенным аэрозольным фоторезистом.
Для этих целей был собран вот такой нагреватель:
намотанный нихромовой нитью, при этом потребляемый ток от 12 В блока питания составляет 3,6 А.
Накрывается эта вся конструкция коробочкой, и температура внутри достигает через несколько минут до 70 градусов.
Поскольку такой нагреватель хоть и выполняет свои функции, но был довольно скучен, поэтому было решено собрать ПИД регулятор температуры для данного нагревателя.
После некоторых размышлений по поводу ПИД регулирования и взирая на текущую деятельность связаную с мощным и несовсем насосным оборудованием которое управляется частотниками, кстати все они настроены на ПИ регулирование. Собственно температура как и давление не может изменится мгновенно и поэтому Д составляющую было решено выкинуть из системы регулирования.
Мощность в нагрузке будет регулироваться ШИМом так что вообщем ничего особенного, силовой ключ IRFZ44N, управляющий контроллер Atmega8, 4 кнопки, UART для общения с ПК, ЖКИ дисплей 1602 для отображения, DS18B20 для измерения температуры.
Здесь роль нагрузки выпала на долю двигателя, в жизни там включен нагреватель.
Если со схемой все понятно, то с программой не все так гладко, как хотелось бы.
ПИД в пидивикии
Мы применяем рекуррентную формулу:
и для своего случая выбрасываем Д составляющую, получаем:
E(n)=X(n)-X0(n) – невязка;
X(n) – текущее значение параметра;
X0(n) – заданое значение, к которому стремится система;
Kp – коэффициент пропорционального регулятора, задается вручную;
Ki – коэффициент интегрального регулятора, задается вручную;
В грамотной реализации программы для регулятора очень помогло использование хабр
Кроме всех упомянутых по ссылке выше фич и багов, в регуляторе еще организовано ограничение управляющей переменной в пределах 0-255, при попадании текущей температуры в пределы +1/-1 градус, для более быстрого выхода температуры на заданное значение, фактически отбрасывается накопленое значение.
Хорошо написана программа должна реализовывать переходную характеристику 3 или 4, при правильно настроенных коэффициентах.
Управление осуществляется 4 кнопками ентер (En), ескейп (Es), плюс (+), минус (-). Подача питания при зажатой кнопке En это вход в меню, где можно настроить температуру уставки и коэффициенты Kp и Ki. Так же для ПК написана програма через которую можно смотреть уставку так и менять ее, а также каждые 2 с при запущенной программе текущая температура записывается в екселевский файл, при отсутствии связи с устройством записываются нули.
И так с программой и схемой все понятно, настала очередь печатной платы. Дисплей соединяется с основной платой шлейфом, кнопки размещаются на отдельной плате и подключаются к внешнему разъему как и датчик температуры, нагреватель. Так же на внешний разъем выведен UART для фозможности связи с ПК.
Печатная плата клавиатуры
Дисплей приклеен на термоклей к корпусу, кстати с прорезью под дисплей накосячил, должно закрыться фальшпанелью, кнопки размещены на верхней грани корпуса, плата приклеена термоклеем, под кнопки прорезаны отверстия, тоже закроются фальшпанелью, на нижней грани корпуса выведены клемники для подключения периферии. Здесь есть светодиод зеленый для индикации работы прибора. Шлейф клавиатуры припаян сразу к главной плате, клемник для подключения внешней клавиатуры остался, но не используется.
Нагреватель накрывается сверху коробкой с отверстием сверху где ставленый датчик температуры.
Картинка поясняющая настройки меню регулятора:
Я настраивал регулятор по методике которая описана здесь
График температуры нагрева от комнатной температуры до 40 градусов при коэфициентах П=40 и И=0,55
Поскольку система не имеет охладителя то переход по температуре вниз осуществляется за счет естественного остывания всмей системы и является весьма длительным.
При правильно настроеных коэфициентах стабильность температуры держится в пределах 0,1 градуса:
Регулирование температуры уставки можно осуществлять по средством программы на ПК, для этого необходим переходник USB-UART или COM-UART, программа стабильно работает с WinXP и WIN7, с остальными не проверял. Так же программа создает в текущей папке файл temperature.xls в который каждые 2 с пишется текущее значение температуры.
При обрыве связи с устройством:
Новая уставка вводится в специальное поле и после нажатия кнопки “Установить” передается в прибор.
Все значения введеные с клавиатуры после нажатия кнопки En после выбора значения записываются в ЕЕПРОМ и при новом включении прибора остаются, значение уставки введеные с ПК после сброса питания устройства не сохраняются.
Недоработки по устройству которые при желании можно устранить:
– отсутсвует регулированое охлаждение;
– уставка введеная с ПК не сохраняется при сбросе устройства;
– нет возможности настраивать устройство с ПК.
– в файл с температурой не пишется время выборки.
Несколько фото того что получилось:
Старая версия:
Видео работы устройства:
График построенный по режиму снятому на видео:
Я прошивал через бутлоудер chip45boot2. Для загрузки прошивки на контроллер достаточно иметь переходник USB-UART или COM-UART, так же данный бутлоудер поддерживает загрузку прошивки по RS-485, но перед этим придется прошить контроллер обычным программатором. Бутлоудер позволит обновлять прошивку при выходе новой версии без дополнительных мучений. Вы можете использовать любой другой бутлоудер, который работает с UART или не пользоватся им вовсе.
Фьюзы:
Естественно применять ПИ регулятор для сушки фоторезиста это чересчур, но возможных применений для него весьма много.
Доп. ссылки на видео, если нормально не вставилось:
часть1
часть2
Файлы:
схема, проект для протеуса
прошивка бутлоадером для 8 меги
Печатные платы
Файлы прошивок
Описание бутлоадера
Все вопросы в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
Векторное управление
Дмитрий Левкин
Главная идея векторного управления заключается в том, чтобы контролировать не только величину и частоту напряжения питания, но и фазу. Другими словами контролируется величина и угол пространственного вектора [1]. Векторное управление в сравнении со скалярным обладает более высокой производительностью. Векторное управление избавляет практически от всех недостатков скалярного управления.
- Преимущества векторного управления:
- высокая точность регулирования скорости;
- плавный старт и плавное вращение двигателя во всем диапазоне частот;
- быстрая реакция на изменение нагрузки: при изменении нагрузки практически не происходит изменения скорости;
- увеличенный диапазон управления и точность регулирования;
- снижаются потери на нагрев и намагничивание, повышается КПД электродвигателя.
- К недостаткам векторного управления можно отнести:
- необходимость задания параметров электродвигателя;
- большие колебания скорости при постоянной нагрузке;
- большая вычислительная сложность.
Общая функциональная схема векторного управления
Общая блок-диаграмма высокопроизводительной системы управления скорости бесщеточного двигателя переменного тока показана на рисунке выше. Основой схемы являются контуры контроля магнитного потокосцепления и момента вместе с блоком оценки, который может быть реализован различными способами. При этом внешний контур управления скоростью в значительной степени унифицирован и генерирует управляющие сигналы для регуляторов момента М* и магнитного потокосцепления Ψ* (через блок управления потоком). Скорость двигателя может быть измерена датчиком (скорости / положения) или получена посредством оценщика, позволяющего реализовать бездатчиковое управление.
Классификация методов векторного управления
Начиная с семидесятых годов двадцатого века было предложено множество способов управления моментом. Не все из них нашли широкое применение в промышленности. Поэтому, в данной статье рассматриваются только самые популярные методы управления. Обсуждаемые методы контроля момента представлены для систем управления асинхронными двигателями и синхронными двигателями с постоянными магнитами с синусоидальной обратной ЭДС.
Существующие методы управления моментом могут быть классифицированы различным способом.
- Чаще всего методы управления моментом разделяют на следующие группы:
- линейные (ПИ, ПИД) регуляторы;
- нелинейные (гистерезисные) регуляторы.
| Метод управления | Диапазон регулирования скорости | Погрешность скорости3, % | Время нарастания момента, мс | Пусковой момент | Цена | Описание | ||
|---|---|---|---|---|---|---|---|---|
| Скалярный | 1:101 | 5-10 | Не доступно | Низкий | Очень низкая | Имеет медленный отклик при изменении нагрузки и небольшой диапазон регулирования скорости, но при этом прост в реализации. | ||
| Векторный | Линейный | Полеориентированное управление | >1:2002 | 0 | Высокий | Высокая | Позволяет плавно и быстро управлять основными параметрами двигателя – моментом и скоростью. Для работы данного метода требуется информация о положении ротора. | |
| Прямое управление моментом с ПВМ | >1:2002 | 0 | Высокий | Высокая | Гибридный метод, разработанный для того чтобы объединить преимущества ПОУ и ПУМ. | |||
| Нелинейный | Прямое управление моментом с таблицей включения | >1:2002 | 0 | Высокий | Высокая | Имеет высокую динамику и простую схему, но характерной особенностью его работы являются высокие пульсации тока и момента. | ||
| Прямое самоуправление | >1:2002 | 0 | Высокий | Высокая | Имеет частоту переключения инвертора ниже чем у других методов и предназначен для уменьшения потерь при управлении электродвигателями большой мощности. | |||
Примечание:
- Без обратной связи.
- С обратной связью.
- В установившемся режиме
Среди векторного управления наиболее широко используются полеориентированное управление (FOC – field oriented control) и прямое управление моментом (DTC – direct torque control).
Линейные регуляторы момента работают вместе с широтно-импульсной модуляцией (ШИМ) напряжения. Регуляторы определяют требуемый вектор напряжения статора усредненный за период дискретизации. Вектор напряжения окончательно синтезируется методом ШИМ, в большинстве случаев используется пространственно векторная модуляция (ПВМ). В отличие от нелинейных схем управления моментом, где сигналы обрабатываются по мгновенным значениям, в линейных схемах контроля момента, линейный регулятор (ПИ) работает с значениями усредненными за период дискретизации. Поэтому частота выборки может быть уменьшена с 40 кГц у нелинейных регуляторов момента до 2-5 кГц в схемах линейных регуляторов момента.
Полеориентированное управление
Полеориентированное управление (ПОУ, англ. field oriented control, FOC) – метод регулирования, который управляет бесщеточным электродвигателем переменного тока (СДПМ, АДКР), как машиной постоянного тока с независимым возбуждением, подразумевая, что поле и момент могут контролироваться отдельно.Полеориентированное управление, предложенное в 1970 году Блашке [3] и Хассе [4] основано на аналогии с механически коммутируемым коллекторным двигателем постоянного тока с независимым возбуждением. В этом двигателе разделены обмотки возбуждения и якоря, потокосцепление контролируется током возбуждения индуктора, а момент независимо управляется регулировкой тока якоря. Таким образом, токи потокосцепления и момента электрически и магнитно разделены.
Общая функциональная схема бездатчикового полеориентированного управления1
С другой стороны бесщеточные электродвигатели переменного тока (АДКР, СДПМ) чаще всего имеют трехфазную обмотку статора, и вектор тока статора Is используется для контроля и потокосцепления и момента. Таким образом, ток возбуждения и ток якоря объединены в вектор тока статора и не могут контролироваться раздельно. Разъединение может быть достигнуто математически – разложением мгновенного значения вектора тока статора Is на две компоненты: продольную составляющую тока статора Isd (создающую поле) и поперечную составляющую тока статора Isq (создающую момент) во вращающейся dq системе координат ориентированной по полю ротора (R-FOC – rotor flux-oriented control) – рисунок выше. Таким образом, управление бесщеточным двигателем переменного тока становится идентичным управлению КДПТ с независимым возбуждением и может быть осуществлено используя инвертер ШИМ с линейным ПИ регулятором и пространственно-векторной модуляцией напряжения.
В полеориентированном управлении момент и поле контролируются косвенно посредством управления составляющими вектора тока статора.
Мгновенные значения токов статора преобразовываются к dq вращающейся системе координат с помощью преобразования Парка αβ/dq, для выполнения которого также требуется информации о положении ротора. Поле контролируется через продольную составляющую тока Isd, в то время как момент контролируется через поперечную составляющую тока Isq. Обратное преобразование Парка (dq/αβ), математический модуль преобразования координат, позволяет вычислить опорные составляющие вектора напряжения Vsα* и Vsβ*.
Формы сигналов на разных этапах преобразования
Для определения положения ротора используется либо датчик положения ротора установленный в электродвигателе либо реализованный в системе управления бездатчиковый алгоритм управления, который вычисляет информацию о положении ротора в режиме реального времени на основании тех данных, которые имеются в системе управления.
Прямое управление моментом с пространственно векторной модуляцией
Прямое управление моментом с пространственно векторной модуляцией осуществляется в прямоугольной системе координат ориентированной по полю статора, следовательно для данного управления не требуется информация о положении ротора.
В частности данный метод реализует бездатчиковое управление синхронным электродвигателем с постоянными магнитами во всем диопазоне скоростей, включая низкую скорость, без необходимости накладывать высокочастотный сигнал и изменять конструкцию ротора, как это делается в бездатчиковом полеориентированном управлении электродвигателем с постоянными магнитами.
Прямое управление моментом с пространственно векторной модуляцией напряжения
Блок-схема прямого управления моментом с пространственно векторной модуляцией с регулировкой момента и потокосцепления с обратной связью работающей в прямоугольной системе координат ориентированной по полю статора представлена на рисунке ниже. Выходы ПИ регуляторов момента и потокосцепления интерпретируются как опорные составляющие напряжения статора Vψ* и VM* в системе координат dq ориентированной по полю статора (англ. stator flux-oriented control, S-FOC). Эти команды (постоянные напряжения) затем преобразуются в неподвижную систему координат αβ, после чего управляющие значения Vsα* и Vsβ* поступают на модуль пространственно векторной модуляции.
Функциональная схема прямого управления моментом с пространственно векторной модуляцией напряжения
Обратите внимание, что данная схема может рассматриваться как упрощенное управление ориентированное по полю статора (S-FOC) без контура управления током или как классическая схема прямого управления моментом с таблицей включения (ПУМ-ТВ, англ. switching table DTC, ST DTC) в которой таблица включения заменена модулятором (ПВМ), а гистерезисный регулятор момента и потока заменены линейными ПИ регуляторами.
В схеме прямого управления моментом с пространственно векторной модуляцией (ПУМ-ПВМ) момент и потокосцепление напрямую управляются в замкнутом контуре, поэтому необходима точная оценка потока и момента двигателя. В отличии от классического алгоритма гистерезисного прямого управления моментом, ПУМ-ПВМ работает на постоянной частоте переключения. Это значительно повышает характеристики системы управления: уменьшает пульсации момента и потока, позволяет уверенно запускать двигатель и работать на низких оборотах. Но при этом снижаются динамические характеристики привода.
Прямое управление моментом с пространственно векторной модуляцией потока
Прямое управление моментом с пространственно векторной модуляцией потока представляет собой упрощенный вариант схемы прямого управления моментом с пространственно векторной модуляцией напряжения. В данном случае при управлении не осуществляется преобразование из неподвижной системы координат во вращающуюся (αβ -> dq).
Функциональная схема прямого управления моментом с пространственно векторной модуляцией потока
Для управления моментом электродвигателя используется ПИ регулятор контролирующий приращение угла крутящего момента Δδ при заданном изменении крутящего момента ΔM на входе. Использование ПИ регулятора обусловлено тем, что связь между изменением крутящего момента ΔM и приращением угла крутящего момента Δδ сложна и нелинейна [7]. Затем приращение угла момента Δδ добовляется к углу вектора потока статора θs в прямоугольной системе координат ориентированной по полю статора α, β, чтобы вычислить управляющий вектор потока статора ψs*. Полученное значение управляющего вектора потока статора сравнивается с оцененным потоком после чего полученная разница Δψs используется блоком ПВМП для рассчета управляющего вектора напряжения статора и вычисления состояний включения ключей инвертора [8]. В данной схеме благодаря наличию цикла управления потоком статора используемого для вычисления Δψs, использование ПИ регулятора потока не требуется.
Представленная группа регуляторов момента отходит от идеи преобразования координат и управления по аналогии с коллекторным двигателем постоянного тока, являющегося основой для полеориентированного управления. Нелинейные регуляторы предлагают заменить раздельное управление на непрерывное (гистерезисное) управление, которое соответствует идеологии работы (включено-выключено) полупроводниковых устройств инвертора.
В сравнении с полеориентированным управлением схемы прямого управления моментом имеют следующие характеристики:
- Преимущества:
- простая схема управления;
- отсутствуют контуры тока и прямое регулирование тока;
- не требуется преобразование координат;
- отсутствует отдельная модуляция напряжения;
- датчик положения не требуется;
- хорошая динамика.
- Недостатки:
- требуется точная оценка вектора магнитного потокосцепления статора и момента;
- сильные пульсации момента и тока из-за нелинейного (гистерезисного) регулятора и переменной частоты переключения ключей;
- шум с широким спектром из-за переменной частоты переключения.
Прямое управление моментом
Впервые метод прямого управления моментом с таблицей включения был описан Такахаси и Ногучи в статье IEEJ представленной в сентябре 1984 года и позже в статье IEEE опубликованной в сентябре 1986 года [5]. Схема классического метода прямого управления моментом (ПУМ) на много проще, чем у метода управления по полю (ПОУ), так как не требуется преобразования систем координат и измерения положения ротора. Схема метода прямого управления моментом (рисунок ниже) содержит оценщик момента и потокосцепления статора, гистерезисные компараторы момента и потокосцепления, таблицу включения и инвертор.
Принцип метода прямого управления моментом заключается в выборе вектора напряжения для одновременного управления и моментом и потокосцеплением статора. Измеренные токи статора и напряжение инвертора используются для оценки потокосцепления и момента. Оцененные значения потокосцепления статора и момента сравниваются с управляющими сигналами потокосцепления статора ψs* и момента двигателя M* соответственно посредством гистерезисного компаратора. Требуемый вектор напряжения управления электродвигателем выбирается из таблицы включения исходя из оцифрованных ошибок потокосцепления dΨ и момента dM генерируемых гистерезисными компараторами, а также исходя из сектора положения вектора потокосцепления статора полученного исходя из его углового положения . Таким образом, импульсы SA, SB и SC для управления силовыми ключами инвертора генерируются посредством выбора вектора из таблицы.
Классическая схема прямого управления моментом с таблицей включения с датчиком скорости
- Характерные черты схемы ПУМ-ТВ:
- синусоидальные формы потокосцепления и токов статора с коэффициентом гармоник определяемым зоной гистерезиса (зоной нечувствительности) регуляторов потокосцепления и момента;
- отличная динамика момента;
- зоны гистерезиса потокосцепления и момента определяют частоту переключения инвертора, которая изменяется с изменением синхронной скорости и изменением нагрузки [2].
Имеется множество вариаций классической схемы ПУМ-ТВ нацеленых на улучшение пуска, условий перегрузки, работы на очень низких скоростях, уменьшение пульсаций момента, работу на переменной частоте переключения и уменьшение уровня шумов.
Недостатком классического метода прямого управления моментом является наличие высоких пульсаций тока и момента в установившемся состоянии. Проблема устраняется повышением рабочей частоты инвертора выше 40кГц, что увеличивает общую стоимость системы управления [1].
Прямое сомоуправление
Заявка на патент метода прямого самоуправления была подана Депенброком в октябре 1984 года [6]. Блок схема прямого самоуправления показана ниже.
Основываясь на командах потокосцепления статора ψs* и текущих фазовых составляющих ψsA, ψsB и ψsC компараторы потокосцепления генерируют цифровые сигналы dA, dB и dC, которые соответствуют активным состояниям напряжений (V1 – V6). Гистерезисный регулятор момента имеет на выходе сигнал dM, который определяет нулевые состояния. Таким образом, регулятор потокосцепления статора задает отрезок времени активных состояний напряжений, которые перемещают вектор потокосцепления статора по заданной траектории, а регулятор момента определяет отрезок времени нулевых состояний напряжений, которые поддерживают момент электродвигателя в определенном гистерезисом поле допуска.
Схема прямого самоуправления
- Характерными особенностями схемы прямого самоуправления являются:
- несинусоидальные формы потокосцепления и тока статора;
- вектор потокосцепления статора перемещается по шестиугольной траектории;
- нет запаса по напряжению питания, возможности инвертора используются полностью;
- частота переключения инвертора ниже чем у прямого управления моментом с таблицей включения;
- отличная динамика в диапазонах постоянного и ослабленного поля.
Заметьте, что работа метода прямого самоуправления может быть воспроизведена с помощью схемы ПУМ-ТВ при ширине гистерезиса потока 14%.
- Cristian Busca. Open loop low speed control for PMSM in high dynamic application.- Aalborg, Denmark.: Aalborg universitet, 2010
- Marian P. Kazmierkowski, Leopoldo G. Franquelo, Jose Rodriguez, Marcelo A. Perez, Jose I. Leon. High-Performance Motor Drives: IEEE Industrial Electronics, vol. 5, no. 3, pp. 6-26, Sep.2011
- F. Blaschke. The principle of field-orientation as applied to the transvector closed loop control system for rotating-field machines: Siemens Rev., vol. 34, no. 1, pp. 217–220, 1972.
- K. Hasse. Drehzahlgelverfahren fur schnelle Umkehrantriebe mit strom-richtergespeisten Asynchron-Kurzchlusslaufermotoren: Reglungstechnik, vol. 20, no. 2, pp. 60–66, 1972.
- I. Takahashi, and T. Noguchi. A new quick response and high-efficiency control strategy of an induction motor: IEEE Trans. Ind. Applicat., vol. IA-22, no. 5, pp. 820–827, Sept./Oct. 1986.
- M. Depenbrock. Direct self control of the flux and rotary moment of a rotary-field machine: US4678248, 1987.
- L. Xu, and M. Fu. A sensorless direct torque control technique for permanent magnet synchronous motors: IEEE Industry Applications Conference, 1999
- G. S. Buja and M. P. Kazmierkowski. Direct torque control of PWM inverter-fed AC motors — A survey: IEEE Trans. Ind. Electron, 2004
Библиографический список
Как работают ПИД-регуляторы
Пропорционально-интегрально-производный (ПИД) регулятор может использоваться как средство управления температурой, давлением, расходом и другими параметрами процесса. Как следует из названия, ПИД-регулятор сочетает в себе пропорциональное управление с дополнительными интегральными и производными регулировками, которые помогают устройству автоматически компенсировать изменения в системе.
Основы ПИД-регулятора
Назначение ПИД-регулятора – заставить обратную связь соответствовать заданному значению, например, термостату, который заставляет блок нагрева и охлаждения включаться или выключаться в зависимости от заданной температуры.ПИД-регуляторы лучше всего использовать в системах, которые имеют относительно небольшую массу и быстро реагируют на изменения энергии, добавляемой к процессу. Его рекомендуется использовать в системах, где нагрузка часто изменяется, и ожидается, что контроллер будет автоматически выполнять компенсацию из-за частых изменений уставки, количества доступной энергии или массы, которую необходимо контролировать.
Принцип работы ПИД-регулятора
Принцип работы ПИД-регулятора заключается в том, что пропорциональные, интегральные и производные члены должны быть индивидуально отрегулированы или «настроены».«На основе разницы между этими значениями вычисляется поправочный коэффициент, который применяется к входным данным. Например, если духовка холоднее, чем требуется, нагрев будет увеличиваться. Вот три шага:
- Пропорциональная настройка включает корректировку цели пропорционально разнице. Таким образом, целевое значение никогда не достигается, потому что, когда разница приближается к нулю, то же самое происходит и с применяемой коррекцией.
- Интегральная настройка пытается исправить это, эффективно суммируя ошибку, полученную в результате действия “P”, для увеличения поправочного коэффициента.Например, если температура в духовке остается ниже температуры, «I» будет действовать для увеличения напора. Однако вместо того, чтобы останавливать нагрев при достижении цели, «I» пытается снизить совокупную ошибку до нуля, что приводит к выбросу.
- Производная настройка пытается минимизировать это перерегулирование путем снижения поправочного коэффициента, применяемого по мере приближения к цели.
Принцип работы ПИД-регулятора температуры
Пропорционально-интегрально-производный (ПИД) регулятор может использоваться как средство управления температурой, давлением, расходом и другими параметрами процесса.Как следует из названия, ПИД-регулятор сочетает в себе пропорциональное управление с дополнительными интегральными и производными регулировками, которые помогают устройству автоматически компенсировать изменения в системе.
Техническое обучение Техническое обучение Разъяснение теории ПИД-регулирования– NI
Основная идея ПИД-регулятора заключается в считывании показаний датчика, затем вычислении желаемого выходного сигнала привода путем вычисления пропорционального, интегрального и производного откликов и суммирования этих трех компонентов для вычисления выходного сигнала.Прежде чем мы начнем определять параметры ПИД-регулятора, мы увидим, что такое замкнутая система, и некоторые термины, связанные с ней.
Система с замкнутым контуром
В типичной системе управления технологическая переменная – это системный параметр, который необходимо контролировать, например температура (ºC), давление (psi) или расход (литры / минуту). Датчик используется для измерения переменной процесса и обеспечения обратной связи с системой управления. Уставка – это желаемое или командное значение для переменной процесса, например 100 градусов Цельсия в случае системы контроля температуры.В любой данный момент разница между переменной процесса и уставкой используется алгоритмом системы управления (компенсатором) для определения желаемой выходной мощности исполнительного механизма для управления системой (установкой). Например, если измеряемая температура технологической переменной составляет 100 ºC, а желаемая уставка температуры составляет 120 ºC, то выход исполнительного механизма , заданный алгоритмом управления, может приводить в действие нагреватель. Приведение в действие исполнительного механизма для включения нагревателя приводит к нагреванию системы и увеличению температуры технологической переменной.Это называется системой управления с обратной связью, потому что процесс считывания показаний датчиков для обеспечения постоянной обратной связи и вычисления желаемой выходной мощности привода повторяется непрерывно и с фиксированной скоростью цикла, как показано на рисунке 1.
Во многих случаях выходной сигнал привода равен не единственный сигнал, влияющий на систему. Например, в температурной камере может быть источник холодного воздуха, который иногда вдувает в камеру и нарушает температуру. Такой термин обозначается как нарушение .Обычно мы стараемся спроектировать систему управления, чтобы минимизировать влияние возмущений на переменную процесса.
Рисунок 1: Блок-схема типичной замкнутой системы.
Определение терминологии
Процесс разработки средств управления начинается с определения требований к рабочим характеристикам. Производительность системы управления часто измеряется путем применения ступенчатой функции в качестве переменной команды уставки, а затем измерения реакции переменной процесса. Обычно отклик количественно оценивается путем измерения определенных характеристик формы волны.Время нарастания – это время, необходимое системе для перехода от 10% до 90% от установившегося или конечного значения. Процент превышения – это величина, на которую переменная процесса превышает конечное значение, выраженное в процентах от конечного значения. Время установления – это время, необходимое для того, чтобы переменная процесса установилась в пределах определенного процента (обычно 5%) от окончательного значения. Ошибка устойчивого состояния – это последняя разница между переменной процесса и уставкой. Обратите внимание, что точное определение этих количеств будет варьироваться в зависимости от отрасли и академических кругов.
Рисунок 2: Реакция типичной замкнутой системы ПИД-регулирования.
После использования одной или всех этих величин для определения требований к характеристикам системы управления полезно определить условия наихудшего случая, при которых ожидается, что система управления будет соответствовать этим проектным требованиям. Часто в системе возникает сбой, который влияет на параметр процесса или на измерение параметра процесса. Важно разработать систему управления, которая удовлетворительно работает в наихудших условиях.Мера того, насколько хорошо система управления способна преодолевать эффекты возмущений, называется отклонением возмущения системы управления.
В некоторых случаях реакция системы на заданный управляющий выход может изменяться со временем или в зависимости от некоторой переменной. Нелинейная система – это система, в которой параметры управления, которые дают желаемый отклик в одной рабочей точке, могут не давать удовлетворительного отклика в другой рабочей точке.Например, камера, частично заполненная жидкостью, будет гораздо быстрее реагировать на мощность нагревателя, когда она почти пуста, чем когда она почти заполнена жидкостью. Мера того, насколько хорошо система управления будет выдерживать возмущения и нелинейности, называется устойчивостью системы управления.
Некоторые системы демонстрируют нежелательное поведение, называемое мертвым временем . Мертвое время – это задержка между изменением переменной процесса и моментом, когда это изменение можно наблюдать.Например, если датчик температуры расположен далеко от впускного клапана холодной воды, он не будет сразу измерять изменение температуры, если клапан открывается или закрывается. Мертвое время также может быть вызвано системой или выходным исполнительным механизмом, который медленно реагирует на команду управления, например, клапан, который медленно открывается или закрывается. Обычным источником простоя на химических предприятиях является задержка, вызванная протеканием жидкости по трубам.
Цикл цикла также является важным параметром замкнутой системы.Интервал времени между вызовами алгоритма управления – это время цикла цикла. Системы, которые быстро меняются или имеют сложное поведение, требуют более высокой скорости контура управления.
Рисунок 3: Реакция замкнутой системы с мертвым временем.
После определения требований к производительности пора проверить систему и выбрать подходящую схему управления. В подавляющем большинстве приложений ПИД-регулирование обеспечивает требуемые результаты
Принцип работы пневматического ПИД-регулятора
Пневматические ПИД-регуляторы (ПИД означает пропорционально-интегрально-производная) – это элементы управления, которые используют систему заслонки-сопло для создания выходного давления.Существует широкий спектр промышленных ПИД-контроллеров для контроля температуры, влажности, давления, расхода или любых измеряемых переменных, которыми можно управлять с помощью переключателей или алгоритмов ПИД.
Как и диапазон от 4 до 20 миллиампер для электронной системы управления, пневматическая система имеет диапазон от 3 до 15 фунтов на квадратный дюйм (psi).
N1050 Настраиваемый ПИД-регулятор температуры с ЖК-дисплеем
Регулируемая подача давления, обычно 20 фунтов на квадратный дюйм, обеспечивает источник воздуха через дроссель.Сопло открыто на том конце, где существует зазор между соплом и заслонкой, и воздух выходит в этой области.
Если заслонка опускается и закрывает отверстие форсунки, чтобы не было утечки воздуха, сигнальное давление повысится до давления подачи. По мере удаления заслонки сигнальное давление будет падать из-за утечки воздуха. Наконец, когда заслонка находится далеко, давление стабилизируется на некотором значении, определяемом максимальной утечкой через сопло.
Как и в электронном контроллере, пневматический ПИД-регулятор может быть только пропорциональным (P), пропорционально-производным (PD), пропорционально-интегральным (PI) или пропорционально-интегрально-производным (PID).Давайте посмотрим на каждый элемент.
Пропорциональный элемент пневматического ПИД-регулятора
Пропорциональный элемент пневматического ПИД-регулятора применяет прямое изменение выходного значения после считывания ошибки между вашей уставкой (SP) и вашей переменной процесса (PV) . Взгляните на это изображение, чтобы понять, что я имею в виду.
Любезно предоставлено IAMechatronicsЗдесь у вас есть два давления, приложенных к правому концу рычага. Разница между этими двумя давлениями представляет собой ошибку нашей системы.Увеличение PV приведет к смещению правой стороны вверх, в результате чего перегородка приблизится к соплу. Это изменение увеличивает давление в сильфоне обратной связи, который вернет заслонку в исходное положение (или очень близко к нему).
Обратите внимание, что изменение PV напрямую влияет на выходное давление. Увеличение PV приводит к увеличению выпуска. Если мы хотим изменить действие, то поменяем местами входы давления на сильфоны справа.
Теперь вы можете спросить: «Как мне изменить коэффициент усиления в этой системе?» Для этого вам придется изменить части вашей системы, например, поменять сильфон или переместить точку опоры.
Автоматический и ручной режимы
Автоматический режим означает, что уставка (SP) и переменная процесса (PV) определяют выход, а в ручном режиме выход настраивается оператором. Эта картинка покажет вам весь механизм.
Любезно предоставлено IAMechatronicsДля перехода с автоматического режима на ручной оператор должен проверить индикатор баланса . Перед переключением вы должны увидеть нулевую разницу давлений между выходным сильфоном и выходным регулятором.В этот момент оператор может переключить передаточный клапан в ручной режим. Тогда выход больше не будет реагировать на изменения PV или SP.
Чтобы переключиться обратно в автоматический режим, оператор повторяет процесс, переключая перепускной клапан обратно, когда система находится на нуле. Теперь контроллер снова будет реагировать на изменения PV и SP.
Производный элемент пневматического ПИД-регулятора
Чтобы добавить производное действие к вашему пневматическому ПИД-регулятору, вам необходимо установить ограничительный клапан между трубкой сопла и выходным сильфоном.Это заставит сильфон менять свое давление медленнее, как показано здесь.
Любезно предоставлено IAMechatronicsС добавлением этого клапана, если происходит внезапное изменение в PV или SP, выходное давление должно сначала достичь насыщения, прежде чем выходной сильфон сможет уравнять давление с выходной сигнальной трубкой. Следовательно, вы увидите всплеск выходного давления с этим шагом , изменением на входе.
При изменении линейного изменения на PV или SP выходной сигнал будет сдвигаться прямо пропорционально.Однако вы увидите смещение выходного давления, чтобы воздух проходил через выходной сильфон и уравновешивал изменяющийся сигнал. Таким образом, действие производной смещает выходное давление больше, чем пропорциональный элемент для линейного входа.
Хорошо, теперь перейдем к интегральному действию.
Неотъемлемый элемент пневматического ПИД-регулятора
Для встроенного элемента пневматического ПИД-регулятора требуется не только другой ограничительный клапан, но и еще один сильфон.Они называются сильфонами сброса , и должны располагаться напротив сильфонов обратной связи по выходу, как вы можете видеть здесь.
Предоставлено IAMechatronicsПоначалу эта установка может показаться нелогичной. Однако этот клапан вызывает задержку наполнения сильфона сброса. Таким образом, система работает аналогично схеме резистор-конденсатор (RC) на электронном контроллере.
По мере того, как сильфон сброса медленно заполняется выходным давлением, изменение давления на рычаг заставляет выходной сильфон опережать сильфон сброса за счет постоянного наполнения.Понятно? Нет? Хорошо, посмотрим, как это работает на практике.
Принцип работы пневматического ПИД-регулятора
Взгляните на это изображение. Мы упростили систему до встроенных компонентов пневматического ПИД-регулятора.
Любезно предоставлено IAMechatronicsЗдесь у нас SP составляет 4 фунта на квадратный дюйм, а значение PV показывает 7 фунтов на квадратный дюйм, что дает нам ошибку в 3 фунта на квадратный дюйм. Предположим, расположение точки опоры дает нам коэффициент усиления 1. Ошибка заставляет механизм мгновенно реагировать с выходным давлением 3 фунта на квадратный дюйм на сильфон обратной связи.Давайте также полностью закроем клапан сброса. При закрытом клапане сброса и отсутствии давления в сильфоне сброса система работает как простой пропорциональный регулятор.
Теперь давайте немного приоткроем клапан сброса. По мере заполнения сильфона сброса они нажимают на левую сторону рычага. Эта сила заставляет перегородку приближаться к соплу, увеличивая давление в выходной линии. Стандартный выходной сильфон не имеет ограничительного клапана, замедляющего его наполнение. Следовательно, он сразу же прилагает восходящую силу к рычагу с повышением выходного давления.При таком увеличении выходного давления сильфон сброса имеет еще большее «конечное» давление, которое необходимо достичь, что заставляет его продолжать заполнение.
N1200 Самонастраивающийся ПИД-регулятор с дисплеем для мониторинга процесса
Результат
Хорошо, но зачем нам эти две противостоящие силы? Одна из этих сил возникает мгновенно, а другая имеет задержку из-за своего клапана.Эта задержка заставляет выходной сильфон всегда оставаться на три фунта на кв. Дюйм впереди сильфона сброса для поддержания баланса. Это создает постоянный перепад давления в 3 фунта на квадратный дюйм на клапане сброса, что приводит к постоянному потоку в сильфон сброса.
В конечном итоге это приведет к насыщению выходного давления до максимума. Однако до тех пор механизм демонстрирует интегральную реакцию управления на постоянную ошибку между PV и SP.
Любезно предоставлено IAMechatronicsЧем больше разница между SP и PV, тем больше будет падать давление на ограничительном клапане.Чем быстрее заполняется сильфон сброса, тем быстрее изменяется выходное давление. И снова мы видим, что пневматические и электронные контроллеры работают очень похоже, где величина ошибки определяет скорость выходного сигнала.
Купить промышленный терморегулятор в нашем интернет-магазине
С любыми вопросами по пневматическому ПИД-регулятору и принципу его работы вы можете связаться с нашими инженерами
Что такое интегральная ликвидация?
ПИД-регулятор играет важную роль в управлении параметрами процесса в обрабатывающих отраслях промышленности.Он состоит из пропорционального члена, интегрального члена и производного члена, которые в совокупности уменьшают переходную ошибку и ошибку установившегося состояния. В установившемся режиме, т.е. когда ошибка стремится к нулю, выходной сигнал ПИД равен интегральному члену ПИД.
Если ошибка = 0
, затем
PID = Kc * error + Ki (предыдущий интеграл + ошибка) + Kd (ошибка – последний)
= 0 + Ki (предыдущий интеграл + ошибка) + 0
= Ki (предыдущий интеграл + ошибка)
проведенным выше анализом доказано, что выход ПИД-регулятора в установившемся состоянии равен интегральному члену, который действует как компонент сброса регулятора.Это иллюстрирует важность встроенного регулятора в ПИД-регуляторе. Благодаря преимуществу скорости сброса контроллера и минимизации ошибки до нуля в установившемся режиме, существует серьезный недостаток интегрального члена, то есть прекращение работы интегрального компонента.
Встроенная намотка:
Интегральное нарастание – это процесс накопления интегральной составляющей за пределами насыщения конечного элемента управления. Формула интегральной составляющей в ПИД-регуляторе:
.Интегральная составляющая = (Ts / Ti) * погрешность
Где Ts = временной цикл
Ti = интегральная постоянная времени или частота сброса
Если уставка внезапно повышается или фактическое значение внезапно падает, тогда будет большая ошибка между уставкой и фактическим значением.Эта ошибка приводит к тому, что интегральный компонент накапливается с периодом времени, чтобы вернуть фактическое значение, близкое к заданному. В результате выход контроллера может выйти за пределы насыщения конечного элемента управления. Интегральный компонент все еще может накапливаться за пределами насыщения конечного элемента управления из-за ошибки. Каким бы ни было интегральное значение, конечный элемент или привод не может открываться / закрываться за пределами своего значения насыщения. Эта концепция поясняется на следующем примере
.Считайте, что ПИ-регулятор размещен для управления уровнем жидкости в контроллере, который управляет потоком на входе в резервуар, регулируя положение впускного клапана.Теперь, если уставка повышается оператором из диспетчерской, то ПИ-регулятор рассчитывает новое положение привода в соответствии с ошибкой. Интегральный компонент ПИ-регулятора, который добавляет частоту сброса, будет накапливаться в соответствии с заданными временными циклами. Если выходной сигнал ПИ-регулятора составляет 120% для регулятора, что является вышеуказанным пределом насыщения привода, потому что привод не может открыться за пределы положения 100%. В полном положении клапана также все еще, если ошибка существует, дополнительно увеличивает значение интегральной составляющей.
В это время, если заданное значение понижается оператором, контроллер не может закрыть клапан для уменьшения расхода из-за большого накопления интегрального значения. Как только интегральный компонент достигает своего нормального значения с накоплением отрицательной ошибки, только выход PI будет приводить привод в движение в закрытом направлении. Это интегральное накопление за пределами насыщения конечного элемента управления называется интегральным нарастанием, которое дает плохой отклик контроллера в динамических условиях.
Пример
Рассмотрим приведенный выше пример ПИ-регулятора, используемого для управления уровнем жидкости в резервуаре.
Начальная уставка уровня жидкости = 50%
выход ПИ-регулятора (установившееся состояние) = Рекламный термин + интегральный член
= 0 + 60
= 60
Положение клапана (линейное) = 60 (0-100)
Теперь, если оператор внезапно поднял уставку до 90%, тогда в соответствии с ошибкой ПИ-регулятор увеличивает выход, чтобы открыть клапан, чтобы обеспечить больший поток жидкости.
выход ПИ-регулятор = Рекламный термин + интегральный член
= 20 + 80
= 100
Клапан полностью открывается, даже если уровень жидкости не достигает заданного значения, что приводит к ошибке ввода для ПИ-регулятора.
выход ПИ-регулятор = Условие предложения + интегральное условие
= 10 + 140
= 150
Даже если выходное значение ПИ-регулятора равно 150, клапан может открываться только до 100% открытия.то есть это называется верхним пределом насыщения клапана. Если ошибка все еще не уменьшена, интегральный компонент будет продолжать накапливаться, чтобы ограничить ошибку. Допустим, интегральная составляющая накопилась до 180.
Теперь, если оператор снизил уставку до 50%, то ошибка уровня жидкости составит -40%. Тогда, если пропорциональное усиление равно 0,5, то
выход ПИ-регулятор = Условие предложения + интегральное условие
= -20 + 170
= 150
Положение клапана = 100 (верхний предел насыщения)
Опять же, выход ПИ-регулятора будет меньше 100, чтобы закрыть клапан, когда интегральная составляющая достигает значения меньше 100.Это приводит к плохому контролю уровня жидкости. Чтобы исключить это интегральное накопление за пределами насыщения конечного элемента управления, при проектировании контроллера следует использовать метод предотвращения закручивания.
Также читайте: Безударный переход ПИД-регулятора
Интегральный контроллер– обзор
14.4.1 Качество управления
Если параметры ПИД-регулятора (пропорциональные, интегральные и производные члены) выбраны неправильно, вход управляемого процесса может быть нестабильным; я.е. его выход расходится с колебаниями или без них и ограничивается только насыщением или механическим повреждением. Настройка контура управления – это корректировка его параметров управления (усиление / зона пропорциональности, интегральное усиление / сброс, производное усиление / скорость) до лучших значений для желаемой реакции управления.
Хороший контроль процесса начинается в поле, а не в диспетчерской. Датчики и измерения должны находиться в подходящих местах, а клапаны должны иметь правильный размер с соответствующей регулировкой. Конечные элементы управления, такие как регулирующие клапаны, выполняют изменения, необходимые для управления предпочтительными параметрами процесса, такими как расход, температура, давление, уровень и соотношение.Если приборы в полевых условиях не работают должным образом, нельзя ожидать, что общий контроль процесса будет работать оптимально. Настройка должна быть изменена по мере изменения или ухудшения процесса и оборудования.
Управляемость процесса зависит от коэффициента усиления, который можно использовать. Более высокое усиление обеспечивает лучшее подавление помех и более быструю реакцию на изменения уставки. Преобладающая задержка основана на самой большой задержке в системе. Подчиненное отставание основано на мертвом времени и всех других задержках.Максимальный коэффициент усиления, который можно использовать, зависит от отношения преобладающего запаздывания к подчиненному. Из этого соотношения можно сделать два вывода: (1) уменьшение мертвого времени увеличивает максимальное усиление и управляемость, и (2) увеличение отношения самого длинного запаздывания ко второму по величине увеличивает управляемость. В общем, для управления самым жестким контуром усиление динамического регулятора должно быть как можно большим, не вызывая нестабильности контура.
Настройка контроллера требует установки трех констант в алгоритме ПИД-регулятора для обеспечения управляющего воздействия, разработанного для конкретных требований процесса.Производительность контроллера оценивается с точки зрения его реакции на ошибку, степени превышения контроллером заданного значения и степени колебаний системы. Обратите внимание, что использование алгоритма PID для управления не гарантирует оптимального управления системой.
Наилучшая реакция на изменение процесса или изменение уставки зависит от приложения. Некоторые процессы не должны допускать выхода переменной процесса за пределы уставки, если, например, это было бы небезопасно.Другие процессы должны минимизировать энергию, затрачиваемую на достижение новой уставки. Обычно требуется стабильность реакции (обратная нестабильности), и процесс не должен колебаться при любой комбинации условий процесса и заданных значений. Некоторые процессы обладают некоторой степенью нелинейности, поэтому параметры, которые хорошо работают в условиях полной нагрузки, не работают, когда процесс запускается без нагрузки.
Произошла ошибка при настройке пользовательского файла cookie
Этот сайт использует файлы cookie для повышения производительности.Если ваш браузер не принимает файлы cookie, вы не можете просматривать этот сайт.
Настройка вашего браузера на прием файлов cookie
Существует множество причин, по которым cookie не может быть установлен правильно. Ниже приведены наиболее частые причины:
- В вашем браузере отключены файлы cookie. Вам необходимо сбросить настройки своего браузера, чтобы он принимал файлы cookie, или чтобы спросить вас, хотите ли вы принимать файлы cookie.
- Ваш браузер спрашивает вас, хотите ли вы принимать файлы cookie, и вы отказались.Чтобы принять файлы cookie с этого сайта, нажмите кнопку «Назад» и примите файлы cookie.
- Ваш браузер не поддерживает файлы cookie. Если вы подозреваете это, попробуйте другой браузер.
- Дата на вашем компьютере в прошлом. Если часы вашего компьютера показывают дату до 1 января 1970 г., браузер автоматически забудет файл cookie. Чтобы исправить это, установите правильное время и дату на своем компьютере.
- Вы установили приложение, которое отслеживает или блокирует установку файлов cookie.Вы должны отключить приложение при входе в систему или проконсультироваться с системным администратором.
Почему этому сайту требуются файлы cookie?
Этот сайт использует файлы cookie для повышения производительности, запоминая, что вы вошли в систему, когда переходите со страницы на страницу. Чтобы предоставить доступ без файлов cookie потребует, чтобы сайт создавал новый сеанс для каждой посещаемой страницы, что замедляет работу системы до неприемлемого уровня.
Что сохраняется в файле cookie?
Этот сайт не хранит ничего, кроме автоматически сгенерированного идентификатора сеанса в cookie; никакая другая информация не фиксируется.
Как правило, в cookie-файлах может храниться только информация, которую вы предоставляете, или выбор, который вы делаете при посещении веб-сайта. Например, сайт не может определить ваше имя электронной почты, пока вы не введете его. Разрешение веб-сайту создавать файлы cookie не дает этому или любому другому сайту доступа к остальной части вашего компьютера, и только сайт, который создал файл cookie, может его прочитать.
(PDF) Регулятор напряжения с использованием ПИ-регулятора
8. ЗАКЛЮЧЕНИЕ
Большинство промышленных контроллеров по своей природе являются P-I-D.Основными причинами популярности контроллера P-I-D
являются его простота в конструкции и применимость к различным процессам.
Более того, контроллер можно настроить на процесс, даже без детальной математической
модели процесса. Однако правильная настройка параметров контроллера требует обширных экспериментов
. Методы настройки контроллера будут обсуждены в следующем уроке.
Грубо говоря, желаемые характеристики замкнутого контура, такие как быстрый отклик, установившаяся нулевая ошибка состояния
и меньшее количество перерегулирований, достигаются за счет включения действий
P, I и D соответственно.Но выбор структуры P-D, P-I или P-I-D зависит от типа процесса
, который мы собираемся контролировать.
9. ОБЪЕМ БУДУЩЕЙ РАБОТЫ
Существует несколько способов проведения исследований для расширения возможностей предлагаемых схем управления
. Из-за «явления намотки» любой контроллер с интегральным действием
может давать большие переходные процессы при насыщении привода. Для системы управления
с широким диапазоном рабочих условий может случиться так, что регулирующая переменная достигнет
пределов привода.Когда это происходит, контур обратной связи разрывается, и система работает как
в разомкнутом контуре, потому что исполнительный механизм остается на своем пределе независимо от выхода процесса
. Если используется контроллер с интегрирующим действием, ошибка будет продолжать интегрироваться.
Вместо ПИ-регулятора можно использовать ПИД-регулятор для улучшения переходной характеристики.
СПРАВКА
[1].
