так ли страшен чёрт, как его малюют? Часть 1. Одноконтурная система / Хабр
Эта статья открывает цикл статей, посвященных автоматизированным способам настройки ПИД-регуляторов в среде Simulink. Сегодня разберемся, как работать с приложением PID Tuner.
Введение
Наиболее популярным типом применяемых в промышленности регуляторов в системах управления замкнутыми системами можно считать ПИД-регуляторы. И если структуру и принцип действия контроллера инженеры помнят еще со студенческой скамьи, то его настройка, т.е. расчет коэффициентов регулятора, до сих пор является проблемой. Существует огромное количество литературы, как зарубежной (например, [1, 2]), так и отечественной (например, [3, 4]), где настройка регуляторов объясняется на достаточно непростом языке теории автоматического управления.
В этой серии статей будут описываться автоматизированные способы настройки ПИД-регуляторов с помощью инструментов среды Simulink, таких как:
- PID Tuner
- Response Optimizer
- Control System Tuner
- Frequency Response Based PID Tuner
- Closed-Loop PID Autotuner
В качестве объекта системы управления будет выступать электропривод на базе двигателя постоянного тока с возбуждением от постоянных магнитов, работающий совместно с редуктором на инерционную нагрузку, со следующими параметрами:
- напряжение питания двигателя, ;
- активное сопротивление обмотки якоря двигателя, ;
- индуктивное сопротивление обмотки якоря двигателя, ;
- коэффициент момента двигателя, ;
- момент инерции ротора двигателя, .


Параметры нагрузки и редуктора:
- момент инерции нагрузки, ;
- передаточное число редуктора, .
Статьи практически не содержат математических формул, однако желательно, чтобы читатель обладал базовыми знаниями в теории автоматического управления, а также имел опыт моделирования в среде Simulink для понимания предлагаемого материала.
Модель системы
Рассмотрим линейную систему управления угловой скоростью следящего электропривода, упрощенная структурная схема которой представлена ниже.
В соответствии с приведенной структурой в среде Simulink была построена модель такой системы.
Модели электропривода (подсистема Electric actuator) и инерционной нагрузки (подсистема Load) созданы с помощью блоков библиотеки физического моделирования Simscape:
- модель электропривода,
- модель инерционной нагрузки.
Модели электропривода и нагрузки также включают подсистемы датчиков различных физических величин:
- тока, протекающего в обмотке якоря двигателя (подсистема А),
- напряжения на его обмотке (подсистема V),
- угловой скорости объекта управления (подсистема Ω).

Перед настройкой параметров ПИД-регулятора запустим модель на расчет, приняв передаточную функцию регулятора . Результаты моделирования при отработке входного сигнала 150 об/мин показаны ниже.
Из анализа приведенных графиков видно, что:
- выходная координата системы управления не достигает заданного значения, т.е. в системе присутствует статическая ошибка;
- напряжение на обмотках двигателя достигает значения 150 В в начале моделирования, что повлечет за собой выход его из строя вследствие подачи на его обмотку напряжения больше номинального (24 В).
Пусть реакция системы на единичный импульс должна соответствовать следующим требованиям:
- перерегулирование (Overshoot) не более 10%,
- время нарастания (Rise time) менее чем 0.8 с,
- время переходного процесса (Settling time) менее чем 2 с.
Кроме того, регулятор должен ограничивать напряжение, подаваемое на обмотку двигателя, до значения напряжения питания.
Настраиваем контроллер
Настройка параметров регулятора осуществляется с помощью инструмента PID Tuner, который доступен непосредственно в окне параметров блока PID Controller.
Приложение запускается нажатием на кнопку Tune…, расположенную на панели Automated tuning. Стоит отметить, что до выполнения этапа настройки параметров контроллера необходимо выбрать его вид (П, ПИ, ПД и др.), а также его тип (аналоговый или дискретный).
Поскольку одним из требований является ограничение его выходной координаты (напряжения на обмотке двигателя), то следует задать допустимый диапазон напряжений. Для этого:
- Переходим во вкладку Output Saturation.
- Нажимаем на флаговую кнопку Limit output, в результате чего активируются поля для задания верхней (Upper limit) и нижней (Lower limit) границы диапазона выходной величины.
- Устанавливаем границы диапазона.
Корректная работа блока регулятора в составе системы предполагает использования методов, направленных на борьбу с интегральным насыщением. В блоке реализованы два метода: back-calculation и clamping. Подробная информация о данных методах располагается здесь. Выпадающее меню выбора метода расположено на панели Anti-windup.
В блоке реализованы два метода: back-calculation и clamping. Подробная информация о данных методах располагается здесь. Выпадающее меню выбора метода расположено на панели Anti-windup.
В рассматриваемом случае запишем значения 24 и -24 в поля Upper limit и Lower limit соответственно, а также используем метод clamping для исключения интегрального насыщения.
Можно заметить, что внешний вид блока регулятора изменился: появился знак насыщения рядом с выходным портом блока.
Далее, приняв все изменения нажатием кнопки Apply
, возвращаемся во вкладку Main и нажимаем кнопку Tune…, в результате чего откроется новое окно приложения PIDTuner.В графической области окна отображаются два переходных процесса: при текущих параметрах регулятора, т.е. для ненастроенного регулятора, и при значениях, подобранных автоматически. Новые значения параметров можно посмотреть, нажав на кнопку Show Parameters, расположенную на панели инструментов. При нажатии на кнопку появятся две таблицы: подобранные параметры регулятора (Controller Parameters) и произведенные оценки характеристик переходного процесса при подобранных параметрах (Performance and Robustness).
При нажатии на кнопку появятся две таблицы: подобранные параметры регулятора (Controller Parameters) и произведенные оценки характеристик переходного процесса при подобранных параметрах (Performance and Robustness).
Как видно из значений второй таблицы, автоматически рассчитанные коэффициенты регулятора удовлетворяют всем требованиям.
Настройка регулятора завершается нажатием на кнопку с зеленым треугольником, расположенной справа от кнопки
Результаты моделирования системы с настроенным регулятором для нескольких входных сигналов показаны ниже. При больших уровнях входных сигналов (голубая линия) система будет работать в режиме с насыщением по напряжению.
Отметим, что инструмент PID Tuner подбирает коэффициенты регулятора по линеаризованной модели, поэтому при переходе к нелинейной модели требуется уточнять его параметры. В этом случае можно воспользоваться приложением Response Optimizer.
В этом случае можно воспользоваться приложением Response Optimizer.
Литература
- Handbook of PI and PID Controller Tuning Rules. Aidan O’Dwyer
- PID Control System Design and Automatic Tuning using MATLAB, Simulink. Wang L.
- ПИД-управление в нестрогом изложении. Карпов В.Э.
- ПИД-регуляторы. Вопросы реализации. Части 1, 2. Денисенко В.
|
Коды для заказа Структурная схема собственных каналов Структурная схема шины расширения Карта адресов MODBUS Программа конфигурирования Программа чтения архивов Назначение и область примененияБАЗИС-21.РР — это многоканальный многофункциональный промышленный регулирующий контроллер (ПИД-, ПИ-регулятор), предназначенный для:
Контроллер имеет взрывозащищенные модификации с маркировкой взрывозащиты [Exia]IIC и модификации без взрывозащиты. Контроллер соответствует требованиям «Общих правил взрывобезопасности для взрывопожароопасных химических, нефтехимических и нефтеперерабатывающих производств» и пригоден для использования в системах дискретного управления и автоматического регулирования компрессоров, насосов и другого технологического оборудования в различных областях промышленности. Входные каналыКонтроллер в зависимости от модификации может иметь до 56 двухпозиционных или до 24 аналоговых собственных входных каналов. Посмотреть структурную схему собственных входных/выходных каналов (новое окно). Посмотреть структурную схему шины расширения (новое окно).
Контроллер может принимать сигналы (в том числе искробезопасные) от следующих видов датчиков: двухпозиционных дискретных/токовых,
термопарных, термометров сопротивлений 3-х и 4-х проводных, токовых пассивных (с запиткой от контроллера). Контроллер также может принимать искроопасные сигналы от токовых активных датчиков (без запитки от контроллера) и датчиков напряжения постоянного тока. Выходные каналыКонтроллер в зависимости от модификации может иметь до 42 собственных выходных каналов, из них до 34 дискретных или до 16 аналоговых. Посмотреть структурную схему собственных входных/выходных каналов (новое окно). Контроллер в зависимости от модификации может иметь следующие виды выходных каналов: реле перекидной контакт (~220 В, 5 А), реле нормально разомкнутый контакт (~220, 5 А), транзисторный (=24 В, 100 мА), токовый (800 Ом, 4—20 мА). ТрендыКонтроллер может иметь до 72 трендов (аналоговых и дискретных): до 16 групп по 8 трендов в каждой.
Дискретность опроса тренда — от 0,5 с до 5 мин. Общее количество памяти для хранения трендов — до 24 млн точек. Контура регулированияКонтроллер может иметь до 4-х контуров с простой и до 4-х контуров с каскадной схемой регулирования. Контроллер поддерживает следующие типы выходов контуров регулирования: токовый (4—20 мА), ШИМ (релейный, симисторный, транзисторный), ШИМ для управления реверсивными исполнительными механизмами (релейный, симисторный, транзисторынй). Контроллер реализует следующие законы регулирования: ПИ, ПИД, специальные алгоритмы. В контроллере реализованы следующие режимы работы контуров регулирования: ручной, автоматический, каскадный, функция задания, программый задатчик, регулирования соотношения и косвенное задание. Прочие характеристикиКонтроллер имеет:
В контроллере реализована циклическая программа, которая может состоять из 12 рабочих стадий и стадии Ожидание. На стадиях циклограммы можно изменять алгоритмы работы выходных каналов и контуров регулирования. Контроллер обеспечивает архивирование событий. Обьем архива для исполнения — до 1000 событий. Модификации
Контроллер выпускается в различных модификациях в зависимости от основного блока,
а также от количества и видов входных и выходных модулей. Посмотреть кодирование модификаций (новое окно). ДокументацияВ состав руководства по эксплуатации на контроллер входит следующая документация: Книга 1, часть 1 (Общая информация) | Книга 1, часть 2 (общая часть для контроллеров с цв. ЖКИ) Книга 2, часть 5 (Функционирование в рабочих режимах) Книга 3, часть 9 (Программирование с передней панели) | Книга 3, часть 10 (Программирование при помощи компьютера) Программное обеспечениеДля полноценной работы с контроллером может потребоваться следующее программное обеспечение: Программа конфигурирования устройств серии БАЗИС Программа чтения архивов устройств серии БАЗИС Встроенное ПОТекущая версия встроенного ПО контроллера — 3.06.023 [список изменений].
Запрос на обновление направляйте по адресу support@ecoresurs. См. такжеСтраница с описанием ОРС-сервера Страница с описанием программы-эмулятора контроллеров БАЗИС-21 Общие функциональные возможности контроллеров серии БАЗИС
Общие технические характеристики контроллеров серии БАЗИС
Входные модули (схемы открываются в новом окне):
Выходные модули (схемы открываются в новом окне):
Прочие подключения:
Для проектных огранизаций и отделовСмотри такжеКодирование модификаций (новое окно). Входные модули снятые с производства (схемы открываются в новом окне):
|
 2РР (многоконтурный регулирующий контроллер)
2РР (многоконтурный регулирующий контроллер)
 Длительность хранения тренда — от 1 сут до 1 г.
Длительность хранения тренда — от 1 сут до 1 г.

 ru
с указанием заводского номера контроллера.
ru
с указанием заводского номера контроллера.
 цв.)
цв.) алгоритмы, самонастройка)
алгоритмы, самонастройка) 2 (по ГОСТ 15150—69);
2 (по ГОСТ 15150—69);
 сопротивления 3-х проводн. (3, С) — 8 термопреобразователей сопротивления 3-х проводных;
сопротивления 3-х проводн. (3, С) — 8 термопреобразователей сопротивления 3-х проводных;
Что такое ПИД-регулирование? – MATLAB & Simulink
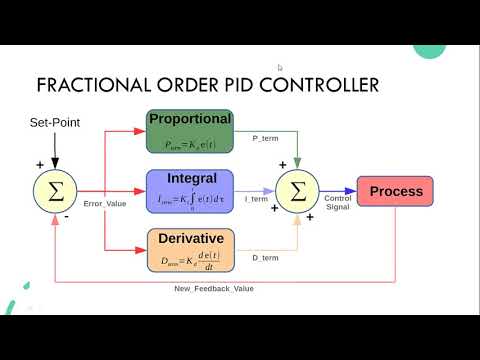
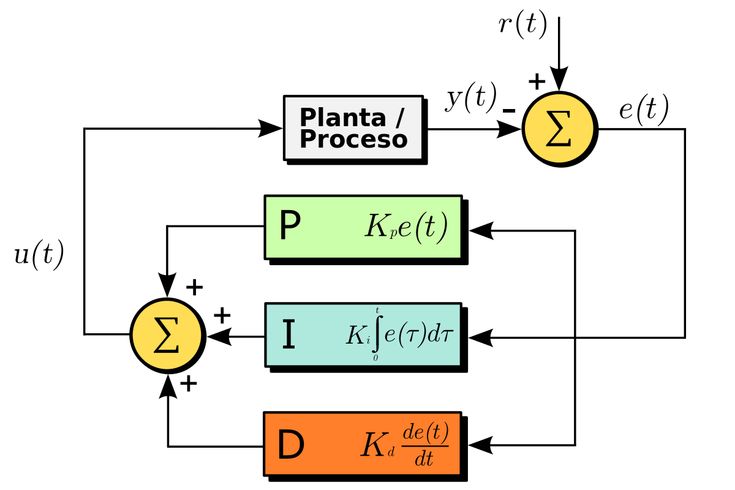
ПИД-регулирование означает соответственно пропорциональное, интегральное и производное управление и является наиболее часто используемым методом управления в промышленности. В следующем видеоролике объясняется, как работает ПИД-регулятор, и обсуждается влияние пропорциональных, интегральных и производных составляющих контроллера на отклик системы с обратной связью. Чтобы узнать, как проектировать и внедрять ПИД-регуляторы, ознакомьтесь с ресурсами под видео.
В следующем видеоролике объясняется, как работает ПИД-регулятор, и обсуждается влияние пропорциональных, интегральных и производных составляющих контроллера на отклик системы с обратной связью. Чтобы узнать, как проектировать и внедрять ПИД-регуляторы, ознакомьтесь с ресурсами под видео.
11:41 Продолжительность видео 11:41.
ПИД-регулирование включает в себя несколько задач, включая:
- Выбор подходящего алгоритма ПИД (P, PI или PID)
- Настройка усиления контроллера
- Моделирование контроллера на модели установки
- Реализация контроллера на целевом процессоре
Хотя в теории проектирование и реализация ПИД-регуляторов просты, на практике они могут оказаться сложными и трудоемкими.
MATLAB и дополнительные продукты повышают эффективность этих задач проектирования, позволяя:
- Настройте блок ПИД-регулятора Simulink для алгоритма ПИД (P, PI или PID), формы контроллера (параллельный или стандартный), защиты от циклов (вкл.
 или выкл.) и насыщения выхода контроллера (вкл. или выкл.)
или выкл.) и насыщения выхода контроллера (вкл. или выкл.) - Автоматическая настройка коэффициентов усиления контроллера в соответствии с моделью объекта и интерактивная точная настройка проекта
- Контроллер автонастройки выигрывает в реальном времени по сравнению с физической установкой
- Настройка нескольких контроллеров в пакетном режиме
- Запустите симуляцию системы с обратной связью, подключив блок ПИД-регулятора к модели объекта
- Автоматически генерировать код C для микроконтроллера
- Автоматически генерировать структурированный текст IEC 61131 для ПЛК или PAC
- Автоматическое масштабирование коэффициентов усиления контроллера для реализации вашего контроллера на процессоре с арифметикой с фиксированной точкой
Примеры и инструкции
Рабочий процесс
- От ПИД-управления к адаптивному управлению: систематическое проектирование контроллеров в Simulink (47:13) – Видео
- Проектирование ПИД-регулятора стало проще – Статья
Моделирование
- Антизаключительное управление с помощью ПИД-регулятора – Пример
- Безударный переход между ручным и ПИД-регулированием – Пример
- ПИД-регулятор с двумя степенями свободы для отслеживания уставки – Пример
Настройка ПИД-регулятора по модели установки
- Проектирование ПИД-регулятора с помощью Control System Toolbox (2:22) – Видео
- Настройка ПИД-регулятора на основе измеренных данных ввода-вывода (3:52) – Видео
- Проектирование ПИД для подавления помех с помощью ПИД-тюнера – Пример
- Проектирование каскадной системы управления с ПИД-регулятором – Пример
- Управление процессами с длительным временем простоя: предиктор Смита – Пример
Управление двигателем
- ПИД-управление бесщеточным двигателем постоянного тока (5:41) – Видео
- Проект ПИД-регулятора для двигателя постоянного тока (3:53) – Видео
- Управление скоростью двигателя BLDC с помощью каскадных ПИ-контроллеров – Пример
- Поле-ориентированное управление асинхронными двигателями с помощью Simulink, часть 3: автоматическая настройка поле-ориентированных контроллеров для асинхронного двигателя (5:25) – Видео
Преобразование мощности
- Активная коррекция коэффициента мощности (7:39) – Видео
- Настройка ПИД-регулятора для понижающего преобразователя (6:31) – Видео
- Настройка ПИД-регулятора для модели с разрывами (5:40) – Видео
- Спроектируйте ПИД-регуляторы для трехфазного выпрямителя Используя блок автотюнера ПИД с обратной связью – Пример
- Спроектируйте ПИД-регулятор Используя симулированные данные ввода/вывода – Пример
Робототехника
- Многоконтурное ПИ-управление роботом-манипулятором – Пример
- Как автоматически настраивать ПИД-регуляторы (6:00) – Видео
Химические процессы
- Планирование усиления ПИД-регуляторов (4:51) – Видео
- Проектирование семейства контроллеров для нескольких рабочих точек – Пример
Механический
- Автоматическая настройка ПИД-регулятора – Пример
- Проектирование ПИД-регулятора с помощью расчетной частотной характеристики – Пример
Автонастройка ПИД-регулятора в реальном времени
- Встроенный автотюнер PID (6:35) – Видео
- Настройте ПИД-регулятор в режиме реального времени Используя блок автонастройки ПИД-регулятора с обратной связью – Пример
- Настройте ПИД-регулятор в режиме реального времени Используя блок автонастройки ПИД-регулятора с разомкнутым циклом – Пример
- Вопросы и ответы по настройке и проектированию ПИД-регуляторов – МАТЛАБ Ответы
Учебники
- Учебное пособие по PID Университета Карнеги-Меллона – Руководство
Справочник по программному обеспечению
Моделирование
- Блок ПИД-регулятора в Simulink – Документация
- Блок ПИД-регулятора (2DOF) – Документация
- ПИД – Документация
Настройка ПИД-регулятора
- Настройка ПИД-регулятора с помощью Control System Toolbox – Документация
- Автоматическая настройка ПИД-регулятора с Simulink Control Design – Документация
- Автонастройка ПИД-регулятора в реальном времени – Документация
- Автонастройка ПИД-регулятора с обратной связью – Документация
- Автонастройка ПИД-регулятора с разомкнутым контуром – Документация
См. также: Системы контроля, проектирование и моделирование системы, физическое моделирование, линеаризация, оценка параметров, настройка ПИД, программное обеспечение для проектирования управления, сюжет Боде, корневой локус, видео ПИД-управления, полеориентированное управление, управление двигателем BLDC, моделирование двигателя для проектирования управления двигателем, коррекция коэффициента мощности, анализ малых сигналов, Оптимальный контроль
также: Системы контроля, проектирование и моделирование системы, физическое моделирование, линеаризация, оценка параметров, настройка ПИД, программное обеспечение для проектирования управления, сюжет Боде, корневой локус, видео ПИД-управления, полеориентированное управление, управление двигателем BLDC, моделирование двигателя для проектирования управления двигателем, коррекция коэффициента мощности, анализ малых сигналов, Оптимальный контроль
Настройка ПИД-регулятора в Simulink – MATLAB & Simulink
В этом примере показано, как автоматически настроить блок PID Controller с помощью PID Tuner .
Знакомство с ПИД-тюнером
ПИД-тюнер обеспечивает быстрый и широко применимый одноконтурный метод настройки ПИД-регулятора для блоков ПИД-регулятора Simulink®. С помощью этого метода вы можете настроить параметры ПИД-регулятора для получения надежной конструкции с желаемым временем отклика.
Типичный рабочий процесс проектирования с помощью PID Tuner включает следующие задачи:
(1) Запуск PID Tuner . При запуске программное обеспечение автоматически вычисляет линейную модель объекта из модели Simulink и проектирует начальный контроллер.
(2) Настройте контроллер в ПИД-тюнере путем ручной настройки критериев проектирования в двух режимах проектирования. Тюнер вычисляет параметры PID, которые надежно стабилизируют систему.
(3) Экспортируйте параметры разработанного контроллера обратно в блок ПИД-регулятора и проверьте производительность контроллера в Simulink.
Откройте модель
Откройте модель управления частотой вращения двигателя с блоком ПИД-регулятора и уделите несколько минут ее изучению.
open_system('scdspeedctrlpidblock')
Обзор проекта
В этом примере вы разрабатываете ПИ-регулятор в контуре управления частотой вращения двигателя.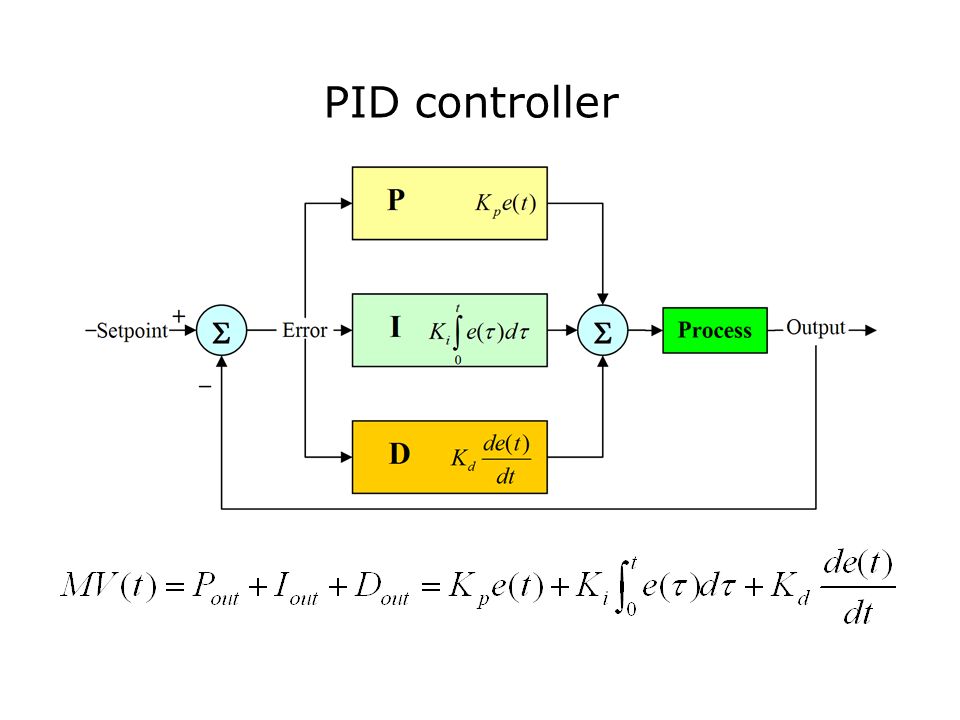 Цель проекта состоит в том, чтобы отслеживать эталонный сигнал от блока шагов Simulink
Цель проекта состоит в том, чтобы отслеживать эталонный сигнал от блока шагов Simulink scdspeedctrlpidblock/Speed Reference . Требования к проекту:
В этом примере вы стабилизируете контур обратной связи и достигаете хороших характеристик отслеживания задания, разрабатывая ПИ-регулятор scdspeedctrl/ПИД-регулятор в ПИД-тюнере .
Open PID Tuner
Чтобы запустить PID Tuner , дважды щелкните блок PID Controller, чтобы открыть его диалоговое окно блока. На вкладке Main щелкните Tune .
Первоначальный проект ПИД-регулятора
При запуске ПИД-тюнера программное обеспечение вычисляет линеаризованную модель объекта, видимую контроллером. Программное обеспечение автоматически идентифицирует вход и выход объекта и использует текущую рабочую точку для линеаризации. На заводе может быть любой заказ и могут быть временные задержки.
ПИД-тюнер вычисляет исходный ПИ-регулятор для достижения разумного компромисса между производительностью и надежностью. По умолчанию производительность отслеживания шага отображается на графике.
По умолчанию производительность отслеживания шага отображается на графике.
На следующем рисунке показано диалоговое окно PID Tuner с первоначальным проектом:
Показать параметры ПИД
Щелкните Показать параметры , чтобы просмотреть параметры контроллера P и I, а также набор измерений производительности и надежности. В этом примере первоначальная конструкция ПИ-регулятора дает время установления 2 секунды, что соответствует требованию.
Настройка ПИД-регулятора в ПИД-тюнере
Выход за пределы отклика отслеживания задания составляет около 7,5 %. Поскольку у нас еще есть место для достижения предела времени установления, вы можете уменьшить перерегулирование, увеличив время отклика. Переместите ползунок времени отклика влево, чтобы увеличить время отклика замкнутого контура. Обратите внимание, что когда вы корректируете время отклика, график отклика, параметры контроллера и измерения производительности обновляются.
На следующем рисунке показан скорректированный ПИД-регулятор с выбросом нуля и временем установления 4 секунды. Разработанный контроллер фактически становится интегральным контроллером.
Полный проект ПИД-регулятора с компромиссом в производительности
Чтобы добиться нулевого перерегулирования при сокращении времени установления менее 2 секунд, вам необходимо использовать преимущества обоих ползунков. Вам необходимо ускорить отклик управления, чтобы сократить время установления, и повысить устойчивость, чтобы уменьшить перерегулирование. Например, вы можете уменьшить время отклика с 3,4 до 1,5 секунды и повысить надежность с 0,6 до 0,72.
На следующем рисунке показана реакция замкнутого контура со следующими настройками:
Запись настроенных параметров в блок ПИД-регулятора
После того, как вы довольны работой контроллера на линейной модели объекта, вы можете протестировать конструкцию на нелинейной модели. Для этого нажмите Блок обновления в PID Tuner .