
ПИД регулирование для чайников
Техничка
Подпишитесь на автора
Подписаться
Не хочу
3
Не знаю имеется ли в этом смысл но вот:
Закончил специальность АТП – автоматизирование технологических процессов, расчет регуляторов является большей частью для моей специальности.
Выходная точность зависит от 2 компонентов – качества измерительной техники и качества управляющей техники.
Измерительная составляющая.
Термистор EPCOS NTC G560 100K – такой стоит у меня в принтере.
Имеет класc точности (1), при разбросе измеряемых температур 355 имеет погрешность в 3,55 градуса.
Номинальное сопротивление имеет 100 ом – это сопротивление при 23.5 градусах, замеряется скорее всего ток (так как плата имеет источник напряжение на входовыходах), в среднем типовые амперметры имеют класс точности 1,5 – это 200мА и 3мА погрешности (1 – 1,5 градуса).
В сумме имеем погрешность в 5 градусов Цельсия.
Немного полиграфии:
Пропорционально-интегро-дифференцирующий (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования.
И по делу:
Пропорциональная составляющая в логическом смысле нас не интересует.
Интегральная составляющая нужна для устранения статической ошибки (без нее регулируемая величина может иметь фиксированное отклонение, что-то вроде +5 градусов на все время регулирования).
Дифференциальная составляющая – это достаточно забавный способ регулирования. Для расчета значения в момент времени Т, она использует значение величины в момент времени Т+1.
Это был небольшой вводный курс в ТАУ.
Есть множество вариантов расчетов ПИД регуляторов, чаще всего используют метод Зиглера, есть уже готовые калькуляторы на матлабе и маткаде.
Если бы мы имели большую вычислительную емкость, на нашей плате, можно было бы использовать опытную схему регулирования (гигантские таблицы с входными изменениями и ответной регулировкой на них). Самый оптимум так как там можно задать воздействия куллера.
Подведу итог : Погрешность измерительных приборов и датчиков сводит на нет точность настройки ПИД регулятора, Если вы закажете высокоточные датчики сразу с преобразованием в hart протокол, rs232 или какой либо еще, и сможете настроить его на своей плате, у вас появится смысл точной (до 0,02) настройки ПИД.
Наиболее удачным вариантом для стабилизации температуры – это материал сопла с высокой теплоемкостью (будет долго нагревается но и колебаться температура будет меньше). Из опыта могу предложить изолировать сопло от ветра(хоть тем же каптоновым скотчем слоев на 20).
Надеюсь я ответил на большинство вопросов по этой теме.
Подпишитесь на автора
Подписаться
Не хочу
3
что это такое, регулирование температуры ПИД регулятором
Содержание:
ПИД регулятор — прибор, встроенный в управляющий контур, с обязательной обратной связью. Он предназначен для поддержания установленных уровней задаваемых величин, например, температуры воздуха.
Устройство подает управляющий или выходной сигнал на устройство регулирования, на основании полученных данных от датчиков или сенсоров. Контроллеры обладают высокими показателями точности переходных процессов и качеством выполнения поставленной задачи.
Контроллеры обладают высокими показателями точности переходных процессов и качеством выполнения поставленной задачи.
Три коэффициента ПИД регулятора и принцип работы
Работа ПИД-регулятора заключается в подаче выходного сигнала о силе мощности, необходимой для поддержания регулируемого параметра на заданном уровне. Для вычисления показателя используют сложную математическую формулу, в составе которой есть 3 коэффициента — пропорциональный, интегральный, дифференциальный.
Возьмем в качестве объекта регулирования ёмкость с водой, в которой необходимо поддерживать температуру на заданном уровне с помощью регулирования степени открытия клапана с паром.
Пропорциональная составляющая появляется в момент рассогласования с вводными данными. Простыми словами это звучит так — берется разница между фактической температурой и желаемой, умножается на настраиваемый коэффициент и получается выходной сигнал, который должен подаваться на клапан. Т.е. как только градусы упали, запускается процесс нагрева, поднялись выше желаемой отметки — происходит выключение или даже охлаждение.
Дальше вступает интегральная составляющая, которая предназначена для того, чтобы компенсировать воздействие окружающей среды или других возмущающих воздействий на поддержание нашей температуры на заданном уровне. Поскольку всегда присутствуют дополнительные факторы, влияющие на управляемые приборы, в момент поступления данных для вычисления пропорциональной составляющей, цифра уже меняется. И чем больше внешнее воздействие, тем сильнее происходят колебания показателя. Происходят скачки подаваемой мощности.
Интегральная составляющая пытается на основе прошлых значений температуры, вернуть её значение, если оно поменялось. Подробнее процесс описан в видео ниже.
А дальше выходной сигнал регулятора, согласно коэффициенту, подается для повышения или понижения температуры. Со временем подбирается та величина, которая компенсирует внешние факторы, и скачки исчезают.
Интеграл используется для исключения ошибок путем расчета статической погрешности. Главное в этом процессе — подобрать правильный коэффициент, иначе ошибка (рассогласование) будет влиять и на интегральную составляющую.
Третий компонент ПИД — дифференцирующий. Он предназначен для компенсации влияния задержек, возникающих между воздействием на систему и обратной реакцией. Пропорциональный регулятор подает мощность до тех пор, пока температура не достигнет нужной отметки, но при прохождении информации к прибору, особенно при больших значениях, ошибки всегда возникают. Это может привести к перегреву. Дифференциал прогнозирует отклонения, вызванные задержками или воздействием внешней среды, и снижает подаваемую мощность заранее.
Назначение ПИД регулятора
ПИД регулятор предназначен для поддержания на требуемом уровне некой величины — температуры, давления, уровня в резервуаре, расхода в трубопроводе, концентрации чего-либо и т.д., изменением управляющего воздействия на исполнительные механизмы, такие как автоматические регулирующие клапана, используя для этого пропорциональную, интегрирующую, дифференцирующую величины для своей настройки.
Целью использования является получение точного управляющего сигнала, который способен контролировать большие производства и даже реакторы электростанций.
Система управления
Прежде чем переходить непосредственно к пиду, очень важно понять и запомнить несколько базовых понятий, из которых состоит автоматическая система. В первую очередь это регулятор, который всем заправляет и находится в центре системы. Регулятор в данном понимании – математический алгоритм или часть программы, которая крутится на микроконтроллере. Регулятор, как алгоритм, работает с обычными числами. Объект управления – это девайс, которым мы управляем, например печка или мотор. Для этого у нас есть управляющее устройство, например диммируемый тен или драйвер мотора. Управляющее устройство получает от регулятора управляющий сигнал, то есть конкретное число. Это может быть заполнение шим сигнала, от 0 до 255, а может быть угол поворота сервомашинки от 0 до 180, потому что регулятору без разницы чем управлять. В объекте управления у нас стоит датчик, с которого регулятор получает управляемую величину, то есть текущий сигнал с датчика. Это – обратная связь, которая и даёт возможность системе ирчно поддержать заданное значение. В случае с печкой это температура, а с мотором – частота оборотов. Ну и наконец регулятор получает установку (уставку), то есть число, к которому он должен привести текущее значение с датчика. Установка может задаваться каким угодно образом: крутилкой, ползунком, энкодером, кнопками, да хоть смской или голосовым вводом. Регулятору это неважно, для него это просто цифра. Задача регулятора состоит в том, чтобы сравнивать текущее значение с установкой и выдавать управляющий сигнал на управляющее устройство. То есть в программе это будет выглядеть условно так: регулятор получил установку, регулятор получил значение с датчика, регулятор выполнил вычисления и выдал нам управляющий сигнал, опять же число. Если это шим – мы его подаём через функцию генерации шим. Есть ещё один момент – регулятор должен делать расчёты и применять управляющий сигнал через равные промежутки времени, то есть с равным периодом или частотой. Эта частота называется частотой дискретизации системы, а период обозначается как dt, прямо как период интегрирования.
В случае с печкой это температура, а с мотором – частота оборотов. Ну и наконец регулятор получает установку (уставку), то есть число, к которому он должен привести текущее значение с датчика. Установка может задаваться каким угодно образом: крутилкой, ползунком, энкодером, кнопками, да хоть смской или голосовым вводом. Регулятору это неважно, для него это просто цифра. Задача регулятора состоит в том, чтобы сравнивать текущее значение с установкой и выдавать управляющий сигнал на управляющее устройство. То есть в программе это будет выглядеть условно так: регулятор получил установку, регулятор получил значение с датчика, регулятор выполнил вычисления и выдал нам управляющий сигнал, опять же число. Если это шим – мы его подаём через функцию генерации шим. Есть ещё один момент – регулятор должен делать расчёты и применять управляющий сигнал через равные промежутки времени, то есть с равным периодом или частотой. Эта частота называется частотой дискретизации системы, а период обозначается как dt, прямо как период интегрирования.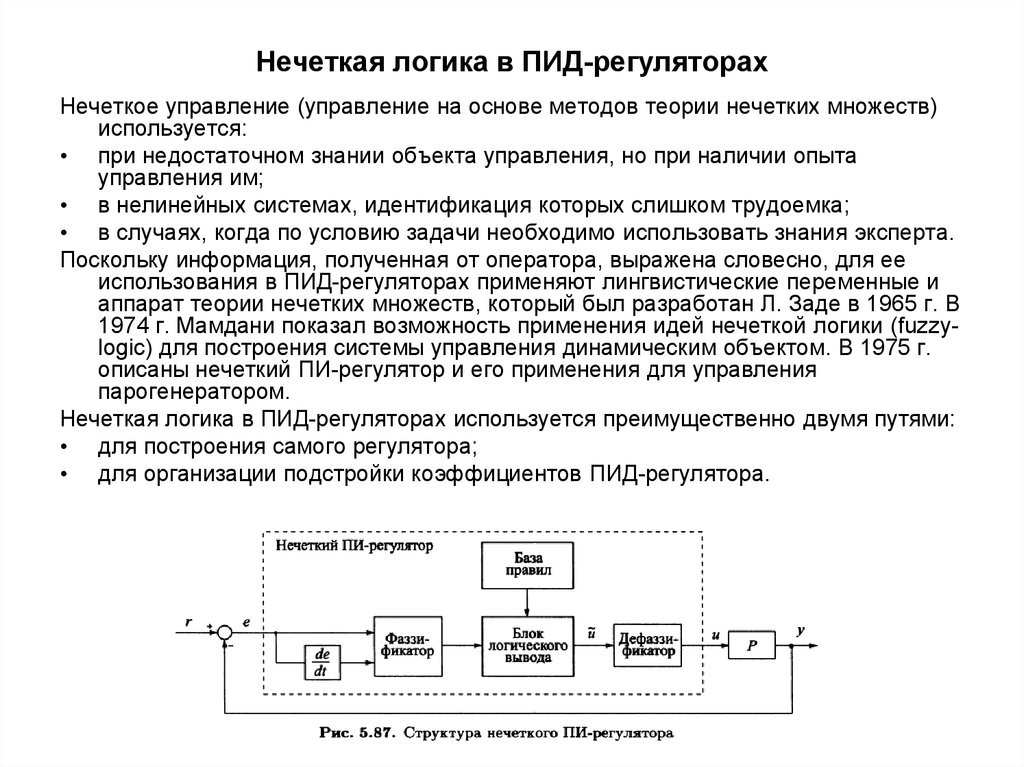
Теория о PID, параметры и как это работает
PID — это аббревиатура из 3 слов:
- Proportional;
- Integral;
- Deriative.
PID — это такая функция в полетном контроллере, которая считывает информацию с датчиков (как правило это гироскоп и акселерометр), обрабатывает и вносит корректировки, а затем отправляет команды регуляторам оборотов (ESC), а они в свою очередь управляют двигателями (быстрее или медленнее им крутиться).
Так вот, самый главный параметр в PID это Proportional. С помощью этого параметра (буду называть параметром) колебания при полете снижаются до минимума.
Колебания — внешние факторы, которые влияют на квадрокоптер в полете (ветер, притяжение и так далее), а также вибрация и дрожание.
В некотором смысле, P пропорциональна степени контроля над осью (под осью понимается PITCH или ROLL или YAW).
Чем меньше Р, тем меньше контроля над осями, чем больше Р, тем больше контроля со стороны этой функции.
Проблема при завышенном параметре Р в том, что он начинает перевыполнять ожидаемый контроль и это начинает приводить к колебаниям.
Качественные регуляторы оборотов (ESC), а также большая скорость вычисления PID-контуров (скрин ниже, помните же такую настройку?) помогает полетному контроллеру гораздо быстрее и эффективнее вносить корректировки в полет для избавления от колебаний.
Скорость обновления PID
А вот I и D участвуют только для исправления оставшихся кусочков ошибок, с которыми не смог или не успел справиться параметр P:
I собирает за Р накопленные ошибки (дрифт), с которыми не справился вовремя Р и исправляет их. Поэтому, если ваш дрон меняет угол наклона после резкой смены положения стика газа (дали резко газ или сбросили), то следует увеличить параметр I. НО, сначала попробуйте увеличить сам Р, вдруг он для вашего дрона слишком низкий и по этому не выполняет свою работу.
D контролирует насколько быстро ось достигает нужного значения. Например, если вы дали квадрокоптеру команду очень быстро остановить двигатели (газ в 0), значение Р при корректировке может проскочить и не внести корректировки. Если вы замечаете такие «симптомы» после резкой смены уровня газа, то увеличение D может помочь снизить колебания, которые возникают сразу после резкой смены уровня газа.
Например, если вы дали квадрокоптеру команду очень быстро остановить двигатели (газ в 0), значение Р при корректировке может проскочить и не внести корректировки. Если вы замечаете такие «симптомы» после резкой смены уровня газа, то увеличение D может помочь снизить колебания, которые возникают сразу после резкой смены уровня газа.
Важно не увеличивать слишком сильно параметр D! Чрезмерное увеличение D приводит к увеличению шума и перегреву двигателей и возможному их возгоранию.
Как настроить PID по шагам
- Убедитесь, что двигатели сбалансированы и у квадрокоптера нет вибрации настолько, насколько есть возможность ее снизить. Попытка настроить PID без «чистого» гироскопа (балансировка и снижение вибрации делается для того, чтобы гироскоп работал без помех) — это все равно, что строить дом без хорошего фундамента. Это видео расскажет вам о простом способе проверки вибрации. Отрегулируйте настройки низкочастотного фильтра (lowpass filter) по мере необходимости, чтобы достигнуть «чистого» сигнала гироскопа.

- Важно, чтобы этот шаг выполнялся в режиме Акро, даже если вы всегда летаете в режиме стабилизации/горизонта. Режимы AngleHorizont имеют свои значения и мешают настройке PID. Пример параметров PID ниже соответствует Rewrite PID (PID controller #1). При выполнении этой первоначальной настройки установите значение TPA равным 0. При необходимости TPA может быть добавлен позже.
- Начинать настройки нужного с маленьких изменений настроек по умолчанию. и начинать нужно с коэффициента Р. Значение Р на Pitch и Roll равное 4.0 будет хорошей отправной точкой.Также, следует снизить I и D у Pitch и Roll для настройки Р с минимальными помехами. Поэтому рекомендуется установить для I — 20, а для D — 5. Для Yaw целесообразно взять значение по умолчанию и разделить на 2. и немного уменьшить значение I, чтобы исключить эту ось в качестве источника колебаний. Yaw настраивается последним.
- Во время тестовых полетов, увеличивайте параметр Р по оси Roll до тех пор пока не увидите колебания при приближении к полному газу, а также не услышите видимые и слышимые колебания.
 Затем установите значение параметра Р равным примерно 70% от значения вызвавшего колебания. Теперь думаю понятно, почему без опыта полетов на конкретном квадрокоптере у вас не получится настроить его PID’ы?
Затем установите значение параметра Р равным примерно 70% от значения вызвавшего колебания. Теперь думаю понятно, почему без опыта полетов на конкретном квадрокоптере у вас не получится настроить его PID’ы? - Повторите шаг 4 для оси Pitch.
- Проверьте, держит ли квадрокоптер нужный угол наклона Roll и не дрейфует ли он при крене (roll), а затем несколько раз дайте резкий газ вверх и резко отпустите его в 0. Вот тут обратите внимание — угол крена который вы сделали до игры газом не должен существенно меняться. Если угол отклонения кажется вам сильно отклонившимся (дрон начал дрейфовать), увеличьте параметр I. Если все ок и дрейфа нет, не меняйте I. Вы можете поменять «ощущение» своего дрона, подняв или опустив параметр I после достижения хороших настроек PID, так как I не влияет на конечные значения P и D.
- Повторите шаг 6 для оси Pitch.
- Параметр D следует увеличивать на каждой оси ТОЛЬКО до такой степени, чтобы он помогал уменьшить отдачу после флипов и роллов (флип — переворот вбок, ролл — переворот «вверх ногами»), а также после колебаний после свободного падения, когда вы делаете газ в 0 и дрон падает, затем запускаете двигатели газом и они начинают как бы проваливаться в воздухе и в этот момент дрон начинает мотать из стороны в сторону.
 Когда такие проблемы пропадут благодаря увеличению параметра D, снизьте этот параметр до уровня 80-90% от этого уровня.
Когда такие проблемы пропадут благодаря увеличению параметра D, снизьте этот параметр до уровня 80-90% от этого уровня.Примечание: слишком высокое значение параметра D может привести к нагреву двигателей. Чтобы проверить нагрев, нужно полетать 20-30 секунд, приземлиться и проверить руками двигатели. Если сможете держать пальцы на моторах, то они не будут сильно нагреваться.
- Часто настройка Yaw не нужна, либо она будет минимальной, так как все равно может вызывать колебания, если ничего не делать.
Начните с Yaw P и проверьте дрон на вибрации как в первом шаге, а также убедитесь, что нет вибраций, если вы дадите резкий и длинный газ или быстрый пролет вперед
Начните увеличивать Yaw Р с шагом 5 до тех пор, пока не увидите вибрации в видео с камеры при полете вперед или полном газе. После этого немного уменьшите значение.
Теперь нужно посмотреть данные в blackbox. Возможно, Yaw P будет немного колебаться, поэтому попробуйте увеличить Yaw gyro, чтобы посмотреть, действительно ли колебания доходят до гироскопа. Если Yaw gyro выглядит более менее ровным, то все в порядке.
Если Yaw gyro выглядит более менее ровным, то все в порядке.Примечание: поскольку yaw по своей природе имеет меньший контроль, нежели pitch и roll, то для этой оси допустимы широкие диапазоны значений. P и I могут быть высокие, а D — низким, это нормально.
- Теперь нужно настроить соотношение между P и I, то есть, будет ли квадрокоптер при резких поворотах сопротивляться или наоборот проваливаться в эти повороты. Очень низкие значения I приводят к смещению оси через некоторое время. Низкие значения I по оси также позволяют свободно менять положение, но при этом сохранять это положение. Более высокие значения по оси I будут хорошо держать позицию дрона, но могут иметь тенденцию сопротивляться движению + добавляется небольшое движение по инерции. Очень высокие значения приводят к «роботизированным» движениям дрона и создают колебания.
- После завершения настройки в режиме Акро, можно переходить к настройкам других режимов, например, Horizon (горизонт).

Помните, что не нужно слишком глубоко зарываться в изучение логов Blackbox для настройки идеальных PID. Если квадрокоптер летает хорошо и вас все устраивает, просто идите и летайте
Настраиваем пропорциональный коэффициент
Выставляем дифференциальный и интегральный коэффициенты в ноль, тем самым убирая соответствующие составляющие. Пропорциональный коэффициент выставляем в 1.
Далее нужно задать значение уставки температуры отличное от текущей и посмотреть, как регулятор будет менять мощность обогревателя, чтобы достичь заданного значения. Характер изменения можно отследить «визуально», если у вас получится мысленно представить этот график. Либо можно регистрировать в таблицу измеренное значение температуры каждые 5-10 секунд и по полученным значением построить график. Затем нужно проанализировать полученную зависимость в соответствии с рисунком:
При большом перерегулировании, необходимо уменьшать пропорциональный коэффициент, а если регулятор долго достигает уставки — увеличивать. Так убавляя-прибавляя коэффициент необходимо получить график регулирования как можно ближе к идеальному. Поскольку достичь идеала удастся вряд ли, лучше оставить небольшое перерегулирование (его можно будет скорректировать другими коэффициентами), чем длительное нарастание графика.
Так убавляя-прибавляя коэффициент необходимо получить график регулирования как можно ближе к идеальному. Поскольку достичь идеала удастся вряд ли, лучше оставить небольшое перерегулирование (его можно будет скорректировать другими коэффициентами), чем длительное нарастание графика.
Настраиваем дифференциальный коэффициент
Постепенно увеличивая дифференциальную составляющую, необходимо добиться уменьшения или полного исчезновения «скачков» графика (перерегулирования) перед выходом на уставку. При этом кривая должна стать еще больше похожа на идеальную. Если слишком сильно завысить дифференциальный коэффициент, температура при выходе на уставку будет расти не плавно, а скачками (как показано на рисунке).
При появлении таких скачков необходимо прекратить увеличение дифференциального коэффициента.
Настраиваем интегральный коэффициент
При настройке двух предыдущих коэффициентов можно получить практически идеальную кривую регулирования или близкую к ней кривую, удовлетворяющую условиям задачи. Однако, как правило возникает так называемая «статическая ошибка». При этом в нашем примере температура стабилизируется не на заданном значении 25 °С, а на несколько меньшем значении. Дело в том, что если температура станет равной уставке (то есть разность текущей и заданной температур станет равна 0), то пропорциональная и дифференциальная составляющая будут равны нулю ( см. функцию преобразования ПИД-регулятора ). При этом мощность регулятора тоже станет равна 0 и он начнёт остывать.
Однако, как правило возникает так называемая «статическая ошибка». При этом в нашем примере температура стабилизируется не на заданном значении 25 °С, а на несколько меньшем значении. Дело в том, что если температура станет равной уставке (то есть разность текущей и заданной температур станет равна 0), то пропорциональная и дифференциальная составляющая будут равны нулю ( см. функцию преобразования ПИД-регулятора ). При этом мощность регулятора тоже станет равна 0 и он начнёт остывать.
Для того чтобы исключить этот эффект, используют интегральную составляющую. Её необходимо постепенно увеличивать до исчезновение статической ошибки. Однако, чрезмерное её увеличение тоже может привести к возникновению скачков температуры.
Метод Циглера-Никольса.
- Для начала обнуляем все коэффициенты регулятора (пропорциональный, интегральный и дифференциальный)
- Постепенно начинаем увеличивать пропорциональный коэффициент и следим за реакцией системы. При определенном значении возникнут незатухающие колебания регулируемой величины.
- Фиксируем коэффициент K, при котором это произошло. Кроме того, замеряем период колебаний системы T.
Собственно, на этом практическая часть метода заканчивается. Из полученного коэффициента K рассчитываем пропорциональный коэффициент ПИД-регулятора:
K_п = 0.6cdot K
А из него получаем и остальные:
K_и = (2cdot K_п)medspace/medspace TK_д = (K_пcdot T)medspace/medspace 8
Метод довольно прост, но применить его можно далеко не всегда. Мне еще ни разу не приходилось на практике настраивать регулятор таким образом. Но тем не менее, этот метод является основным и, по большому счету, единственным широко известным. Просто подходит не всем и не всегда.
Что же делать, если метод Циглера-Никольса не сработал? Тут придет на помощь “аналитический” метод настройки
Опять же обнуляем все коэффициенты и начинаем увеличивать пропорциональный. Но теперь не ждем появления колебаний, а просто фиксируем поведение системы для каждого значения коэффициента (отличным вариантом будет построение графика величины, которую необходимо стабилизировать, для каждого значения коэффициента). Если видим, что, например, система очень медленно выходит на нужное значение, увеличиваем пропорциональный коэффициент. Система начинает сильно колебаться относительно нужной величины? Значит, коэффициент слишком велик, уменьшаем и переходим к настройке других составляющих.
Если видим, что, например, система очень медленно выходит на нужное значение, увеличиваем пропорциональный коэффициент. Система начинает сильно колебаться относительно нужной величины? Значит, коэффициент слишком велик, уменьшаем и переходим к настройке других составляющих.
Понимая, как работает ПИД-регулятор в целом, и представляя, как должна работать настраиваемая система, можно довольно-таки быстро и точно настроить коэффициенты регулятора. Особенно, если есть возможность построить графические зависимости и визуально следить за поведением системы.
Вот некоторые правила, которые могут помочь при настройке ПИД-регулятора:
- Увеличение пропорционального коэффициента приводит к увеличению быстродействия, но снижению устойчивости системы.
- Увеличение дифференциальной составляющей также приводит к значительному увеличению быстродействия.
- Дифференциальная составляющая призвана устранить затухающие колебания, возникающие при использовании только пропорциональной составляющей.

- Интегральная составляющая должна устранять остаточное рассогласование системы при настроенных пропорциональной и дифференциальной составляющих.
Кстати, стоит добавить, что не всегда необходимо использовать все три составляющие ПИД-регулятора, порой хватает пропорциональной и дифференциальной, например. В общем и целом, все сводится к тому, что для каждой системы необходим свой собственный подход при настройке и использовании ПИД-регулятора.
Составляющие сигнала ПИД-регулятора
Управляющий сигнал, формируемый ПИД-регулятором, сумма трех составляющих:
- Пропорциональной.
- Интегральной.
- Дифференциальной.
Пропорциональная составляющая формируется исходя из разницы заданной величины параметра и его фактического значения. Чем больше отклонение характеристики, тем выше уровень пропорционального сигнала. Устройства, управляющие системой, только по пропорциональному закону называются П-регуляторы.
Основной недостаток такого регулирования – статическая ошибка, которая указывает на величину остаточного отклонения параметра. Пропорциональные регуляторы имеют ограниченную точность.
Пропорциональные регуляторы имеют ограниченную точность.
Для ее устранения введена интегральная составляющая. Она пропорциональна интегралу по времени от отклонения величины контролируемой характеристики.
При отклонении параметра, пропорциональная составляющая возвращает его к прежнему значению. Уровень сигнала на выходе стремится к нулю, однако благодаря статической ошибке, регулируемый параметр не достигает заданной величины. Интегральная компонента обеспечивает компенсацию ошибки и позволяет возвращать характеристику к заданным значениям.
Пропорционально-интегральное управление обладает невысоким быстродействием и не подходит для регулирования динамичных систем. Накопление и суммирование ошибок приводит к росту управляющего сигнала. Система может «пойти в разнос».
Для увеличения быстродействия в конструкцию регулятора введена дифференциальная составляющая. Она увеличивается и уменьшается пропорционально скорости изменения контролируемого параметра.
Таким образом, результирующий сигнал на выходе ПИД-регулятора можно определить из выражения:
где Kp, Ki, Kd – пропорциональный, интегральный, дифференциальный коэффициенты соответственно, e(t) – ошибка рассогласования.
Пример применения ПИД-регулятора в частотно-регулируемом приводе насоса
Схемы преобразователей частоты содержат управляющие контроллеры, которые могут обеспечить работу устройства в режиме ПИ или ПИД-регулятора. Специализированные частотники часто уже имеют предустановленные настройки, которые корректируют после установки оборудования.
На рисунке представлена простейшая ПИД схема управления насосом по давлению. К аналоговым входам подключены датчик, установленный на напорном трубопроводе, и внешнее задающее устройство. Требуемое значение давления также можно задавать в настройках регулятора. При изменении регулируемого параметра на контроллере, сравнивающим сигнал обратной связи с заданным значением, формируется управляющий сигнал.
Преобразователь изменяет производительность насоса путем увеличения или снижения частоты питающего напряжения электродвигателя до тех пор, пока давление в системе не достигнет заданного значения. Таким образом, давление в системе не зависит от расхода.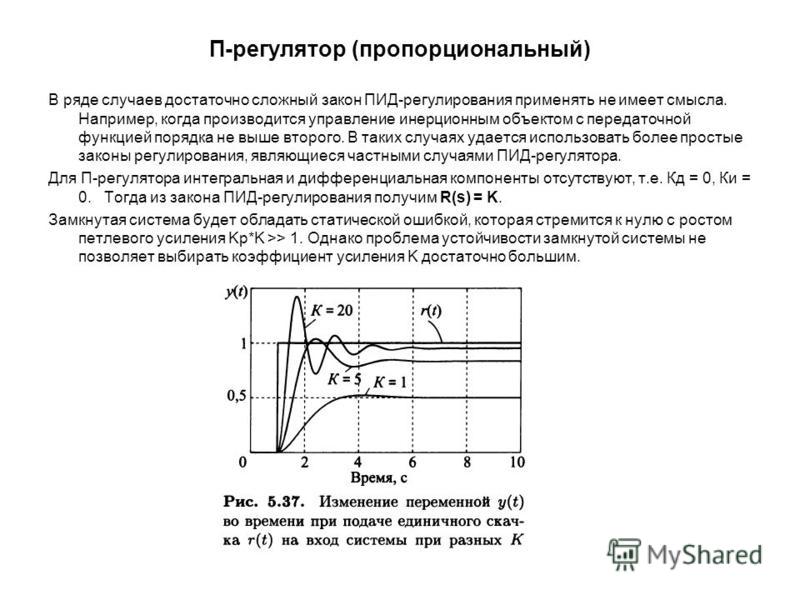
Приведенная схема сильно упрощена. Частотные преобразователи с ПИД-регулятором могут управлять производительностью по нескольким параметрам. Например, насосы в отопительных системах могут регулироваться по температуре теплоносителя и тепловому режиму на улице и в помещении и давлению.
Преобразователи частоты с функциями ПИД-регулятора применяют также в сложных системах регулирования тягодутьевых систем и других АСУТП.
Примечания и советы
В логах черного ящика высокие колебания P не выглядят как острые пики или большие волны. Эти колебания сначала проявляются в самом верху диапазона газа и выглядят как узкие синусоидные волны. Когда они появляются в логах, их еще не видно визуально или на слух, поэтому при начальной настройке (визуально и на слух) рекомендуется сначала достичь точки визуальных и звуковых колебаний, а затем снизить значения до 70%. К моменту, когда все колебания будут видны визуально или на слух, то в логах это тоже будет отчетливо отображаться.
Предыдущая
РазноеЭлектротехника для чайников. Как научиться разбираться в электрике: уроки для начинающих
Следующая
РазноеАвтоматический выключатель — от чего защищает и как он устроен
ПИД-регулятор для начинающих | by Gamze Yılan
В этой статье вы найдете самые основы ПИД-регуляторов.
ПИД-регулятор — это механизм, который используется для управления системой. Подумайте о кондиционере, который будет определять температуру в комнате и доводить ее до определенной температуры, которую вы выберете. Машина будет определять температуру в помещении, сравнивать ее с выбранной вами температурой и включать вентиляторы охлаждения/обогрева в соответствии с этим, верно? Что ж, все это происходит благодаря ПИД-регулятору!
ПИД-регулятор представляет собой систему с замкнутым контуром, что означает, что он работает как контур, как показано на схеме ниже.
Схема ПИД-регулятора Следуя диаграмме, вы увидите, что когда система получает команду, она проходит через контроллер. Контроллер будет выдавать сигнал, который будет обработан системой (или передан в нее), а выход будет использоваться в качестве обратной связи для контроллера, чтобы обновить себя и удовлетворить потребности системы, тем самым создавая «систему с замкнутым контуром».
Контроллер будет выдавать сигнал, который будет обработан системой (или передан в нее), а выход будет использоваться в качестве обратной связи для контроллера, чтобы обновить себя и удовлетворить потребности системы, тем самым создавая «систему с замкнутым контуром».
Таким образом, ПИД-регулятор будет использовать систему обратной связи для получения выходного сигнала и сравнения его с принятым сигналом (он же заданное значение). Разница между выходным значением и значением уставки даст нам ошибку, а цель ПИД-регулятора — минимизировать ошибку путем ее обработки.
Поясним это на примере переменного тока. Температура, которую мы решили, что мы хотим, будет Setpoint , а текущая температура в помещении будет Output 9.Значение 0016 (также называемое переменной процесса или PV), которое мы получаем из процесса . Процесс здесь будет термометром внутри системы переменного тока. В каждом цикле контроллер сравнивает текущую температуру (выход) с желаемой температурой (уставка) и вычисляет разницу (ошибку). Затем контроллер обработает ошибку, обновит себя, и этот цикл будет продолжаться до тех пор, пока система не достигнет минимального значения ошибки. Значение ошибки будет абсолютным числом.
Затем контроллер обработает ошибку, обновит себя, и этот цикл будет продолжаться до тех пор, пока система не достигнет минимального значения ошибки. Значение ошибки будет абсолютным числом.
PID является сокращением от P пропорционального I интегрального D производного, что означает, что контроллер использует три различные системы управления (пропорциональную, интегральную, производную) для минимизации ошибки. На схеме вы увидите основную логику работы каждой системы управления. После использования каждой системы управления выходные данные этих систем будут суммироваться и сравниваться с заданным значением для расчета ошибки. В зависимости от значения ошибки такие параметры, как Kp, Ki и Kd внутри ПИД-регулятора, будут обновляться до тех пор, пока не будет найдено идеальное значение, которое минимизирует ошибку.
Чтобы лучше усвоить следующее содержание, я бы хотел, чтобы вы представили машину как автомобиль, а ПИД-регулятор как драйвер.
1. Пропорциональное управление
Пропорциональное управление просто умножает значение сигнала ошибки на параметр Kp, чтобы минимизировать ошибку. Параметр Kp будет рассчитываться путем многократной отработки системы. Вы можете думать об этом как о рулевом колесе. Чем левее вы от дороги, тем больше вы будете поворачивать руль вправо и наоборот, пока не окажетесь прямо на дороге. Пропорциональное управление сравнивает выходной сигнал с сигналом заданного значения и меняет направление, играя со значением параметра Kp.
Однако, несмотря на то, что пропорциональное управление вносит наибольший вклад в коррекцию, и может использоваться отдельно, использование только этого типа управления будет недостаточным для управления выходным сигналом. Если вы используете только пропорциональное управление, вы столкнетесь с проблемой, называемой «перерегулированием», когда Kp выбирается слишком высоким, и в результате выходной сигнал будет намного выше заданного значения. Вы можете думать об этом как о том, что вы слишком сильно едете вправо от дороги, поворачиваете руль влево, но на этот раз в конечном итоге слишком сильно едете влево. Математически движение вправо может быть положительным значением Kp, и если это так, движение влево будет отрицательным значением Kp.
Вы можете думать об этом как о том, что вы слишком сильно едете вправо от дороги, поворачиваете руль влево, но на этот раз в конечном итоге слишком сильно едете влево. Математически движение вправо может быть положительным значением Kp, и если это так, движение влево будет отрицательным значением Kp.
Также, если вы используете только пропорциональное управление, период времени, необходимый для стабилизации нашего выходного сигнала, т. е. время урегулирования, будет слишком долго. Чтобы стабилизировать систему, нам также понадобится помощь некоторых других форм контроля, таких как интегральный контроль или производный контроль.
2. Интегральное управление
Разница между пропорциональным управлением и интегральным управлением заключается в том, что интегральное управление дает вам коррекцию, основанную на сумме всех ошибок с самого начала процесса, в то время как пропорциональное управление даст вам поправку, просто основанную на данных того самого момента. Думайте об интегральном контроле как о замечании того, что даже если вы пытаетесь ехать прямо по дороге, вы с самого начала едете немного вправо, и корректируете свое поведение в соответствии с этим.
Думайте об интегральном контроле как о замечании того, что даже если вы пытаетесь ехать прямо по дороге, вы с самого начала едете немного вправо, и корректируете свое поведение в соответствии с этим.
Интеграл, как вы, возможно, помните из уроков математики, представляет собой уравнение, которое дает нам сумму пространства под кривой. В этом контексте мы будем использовать интеграл для вычисления суммы интервала между сигналом заданного значения и выходным сигналом. Эта область даст нам ошибку, и для того, чтобы минимизировать ошибку, мы создадим новый сигнал, который даст нам точно такую же область на противоположной стороне сигнала заданного значения путем изменения параметра Ki.
Как и в случае с пропорциональным управлением, в зависимости от выбранного параметра Ki могут возникнуть такие проблемы, как перерегулирование и слишком длительное время установления. Однако Интегральный контроль даст нам лучшие результаты, так как он будет анализировать действия системы в широком промежутке времени.
3. Дифференциальное управление
Дифференциальное управление — это то, что поможет вам избежать проблемы с перерегулированием. Думайте об этом так: вы едете влево от дороги, вы повернули руль вправо. Чем ближе вы к дороге, тем меньше вы будете поворачивать руль вправо благодаря производному управлению.
Дифференциальное управление основано на изменении значения ошибки между моментами, поэтому его нельзя использовать отдельно, в отличие от других методов управления.
ПИД-регулятор — это механизм управления, который одновременно использует методы пропорционального, интегрального и дифференциального управления. Каждый метод управления по-разному влияет на систему. В данном контексте; вы обнаружите, что могут быть ПИ-регуляторы, ПД-регуляторы или ПИД-регуляторы в зависимости от требований системы.
Параметры Kp, Ki и Kd (также известные как коэффициенты усиления системы) будут варьироваться в зависимости от свойств системы, для которой используется контроллер.
ПИД-регулятор очень популярен среди других типов контроллеров, потому что его легко внедрить в систему и он очень эффективен.
Руководство для начинающих: ПИД-управление
ПИД-управление — это простой и практичный метод управления с обратной связью. ПИД-регулирование повсеместно используется во всех отраслях промышленности с долгой историей. Нам нужно понять, как ПИД-регуляторы работают в мире систем управления. В этой статье мы изучим основную концепцию ПИД-регулирования. Приветствуем всех, кто интересуется технологиями контроля с обратной связью!
Резюме
- ПИД-регулирование — это метод управления с обратной связью для систем управления. Основная цель управления — заставить систему управления работать таким образом, чтобы обеспечить желаемое поведение, например, отслеживание ссылок с хорошей точностью. Мы часто используем ключевые показатели/показатели производительности, такие как стабильность, установившаяся ошибка, переходная характеристика и надежность, для оценки производительности системы управления.

- Алгоритм ПИД-регулирования имеет простую структуру с тремя элементами: P (пропорциональный), I (интегральный) и D (дифференциальный/дифференциальный). У каждого термина разные роли. Усиления ПИД-регулятора настраиваются так, чтобы удовлетворять желаемому поведению системы управления.
- ПИД-регулирование долгое время занимало доминирующее положение в отрасли благодаря своей высокой практичности. Ключевые преимущества включают 1) общий и простой метод, 2) простоту реализации и обслуживания, 3) простоту настройки методом проб и ошибок и 4) практические характеристики управления.
- Пример управления скоростью двигателя постоянного тока показывает каждую роль терминов P, I и D. Мы наблюдаем временную характеристику скорости двигателя постоянного тока посредством моделирования. Правильно настроив усиление ПИД-регулятора, мы можем добиться хорошего баланса производительности с установившейся ошибкой и переходной характеристикой.
ПИД-регуляторы работают в системах управления с обратной связью
ПИД-регулирование — это метод управления с обратной связью. На рис. 1 показана блок-схема систем управления с обратной связью. Система состоит из установки (т. е. управляемого процесса) и ПИД-регулятора. Основная цель управления — заставить систему управления работать таким образом, чтобы обеспечить желаемое поведение, например, отслеживание ссылок с хорошей точностью. ПИД-регулятор автоматически обеспечивает действия по управлению, чтобы объект следовал заданным эталонным сигналам.
На рис. 1 показана блок-схема систем управления с обратной связью. Система состоит из установки (т. е. управляемого процесса) и ПИД-регулятора. Основная цель управления — заставить систему управления работать таким образом, чтобы обеспечить желаемое поведение, например, отслеживание ссылок с хорошей точностью. ПИД-регулятор автоматически обеспечивает действия по управлению, чтобы объект следовал заданным эталонным сигналам.
На рис. 1 мы измеряем производительность установки, т. е. контролируемые переменные, такие как положение, скорость, температура, давление, напряжение и все, что мы хотим контролировать. Восприятие — ценная технология в системе управления с обратной связью. Мы не всегда можем измерить. Затем измеренный выход объекта является обратной связью с ПИД-регулятором. Ошибка отслеживания между выходом объекта и заданием, введенным в ПИД-регулятор. Наконец, ПИД-регулятор вычисляет действие управления, чтобы уменьшить ошибку отслеживания.
Как мы оцениваем работу системы управления? Давайте посмотрим ключевые показатели/показатели производительности здесь.
Стабильность
Мы должны избегать выхода из строя системы управления во время работы системы управления. Однако это может произойти в системах управления с обратной связью. Если мы неправильно спроектируем контроллеры с обратной связью, система может попасть в нестабильную ситуацию, продолжая усиливать сигналы обратной связи в контуре обратной связи. В худшем случае это приводит к смертельному исходу. Поэтому инженеры по управлению тщательно проектируют и настраивают контур обратной связи для стабилизации системы. Теоретически мы можем анализировать устойчивость на основе критериев устойчивости в теории управления.
Установившаяся ошибка
Основная цель управления состоит в том, чтобы заставить выход объекта отслеживать заданные опорные сигналы. Установившаяся ошибка является мерой точности отслеживания, которая описывает отклонение от эталонного значения в установившемся режиме. Допустимая установившаяся ошибка отличается от спецификации систем управления. В ПИД-регуляторе член I (интегральный) играет центральную роль в снижении установившейся ошибки.
Допустимая установившаяся ошибка отличается от спецификации систем управления. В ПИД-регуляторе член I (интегральный) играет центральную роль в снижении установившейся ошибки.
Переходная характеристика
Перед тем, как система управления достигнет установившегося состояния, выходное поведение объекта находится в переходном состоянии. Переходная характеристика значительно влияет на производительность системы управления. Например, сколько времени потребуется, чтобы производительность установки достигла эталонного значения? Насколько выходная мощность установки превышает эталонное значение? Мы часто используем такие показатели производительности, как время нарастания, выброс и время установления для оценки во временной области.
Надежность для стабильности и управляемости
Чтобы повысить качество систем управления, мы должны поддерживать стабильность и контролировать производительность с учетом изменений и неопределенностей на предприятиях или во внешней среде. С этой целью мы оцениваем устойчивую устойчивость или характеристики управления в отношении возможного диапазона возмущений или неопределенностей объекта.
С этой целью мы оцениваем устойчивую устойчивость или характеристики управления в отношении возможного диапазона возмущений или неопределенностей объекта.
- Возмущения (например, трение, ветер, сила тяжести и нагрузка)
- Неопределенности установки: немоделированная динамика (например, режимы вибрации на высокой частоте), изменение физических свойств из-за производственных вариаций, изменения окружающей среды или деградации с течением времени 9t e(\tau) d\tau + K_d \frac{de}{dt}(t)\)
где \(e(t)\) – ошибка между выходом объекта \(y(t)\) и ссылка \(r(t)\). \(u(t)\) — это выход ПИД-регулятора, т. е. управляющая команда для объекта. Член P представляет собой текущую ошибку, член I представляет собой накопление прошлой ошибки (интеграл), а член D означает прогноз будущей ошибки. Производная подразумевает градиент сигнала, который предсказывает направление движения в ближайшем будущем. \(K_p\), \(K_i\) и \(K_d\) называются усилениями ПИД-регулятора, которые являются параметрами настройки.
 Инженеры/операторы системы управления настраивали эти три параметра во время разработки/эксплуатации, чтобы системы управления работали в соответствии с желаемым поведением.
Инженеры/операторы системы управления настраивали эти три параметра во время разработки/эксплуатации, чтобы системы управления работали в соответствии с желаемым поведением.P: пропорциональный (настоящий)
Член P обеспечивает управляющее действие для быстрого уменьшения ошибки с использованием имеющейся информации об ошибке e(t). Следует отметить, что мы не можем обязательно устранить установившуюся ошибку, используя только P-управление. Когда мы увеличиваем значения Kp, установившаяся ошибка может уменьшаться. Однако более высокое усиление P может ухудшить переходную характеристику с вибрацией и, возможно, привести к нестабильности контура обратной связи.I: Интеграл (Прошлое)
Член I работает над устранением установившейся ошибки, используя накопленную информацию об ошибке в вычислении интеграла. Поэтому мы используем термин I для повышения точности отслеживания. С другой стороны, член I замедляет управляющее воздействие и влияет на переходную характеристику. Интегральное действие вызывает отставание по фазе на 90 градусов в частотной области. Следовательно, мы должны настроить баланс между усилениями P и I для достижения желаемого поведения.
Интегральное действие вызывает отставание по фазе на 90 градусов в частотной области. Следовательно, мы должны настроить баланс между усилениями P и I для достижения желаемого поведения.D: Производная/дифференциальная (будущая)
Член I работает над устранением установившейся ошибки, используя накопленную информацию об ошибке в вычислении интеграла. Поэтому мы используем термин I для повышения точности отслеживания. С другой стороны, член I замедляет управляющее воздействие и влияет на переходную характеристику. Интегральное действие вызывает отставание по фазе на 90 градусов в частотной области. Следовательно, мы должны настроить баланс между усилениями P и I для достижения желаемого поведения.Передаточная функция
Мы можем преобразовать уравнение ПИД-регулятора во временной области в передаточную функцию в комплексной области, используя преобразование Лапласа.
\(u(s) = \underbrace{(K_p + K_i \frac{1}{s}+ K_d s)}_{C(s)}e(s)\)
В приведенном выше уравнении Интегральные и производные операции по времени исключаются и преобразуются в простую алгебраическую форму переменной s.
 В классической теории управления мы анализируем и разрабатываем системы управления в частотной области (s-мир), чтобы легко манипулировать уравнением системы с помощью передаточных функций. Пожалуйста, посетите статью ниже, если вы заинтересованы в основах преобразования Лапласа.
В классической теории управления мы анализируем и разрабатываем системы управления в частотной области (s-мир), чтобы легко манипулировать уравнением системы с помощью передаточных функций. Пожалуйста, посетите статью ниже, если вы заинтересованы в основах преобразования Лапласа.Руководство для начинающих: преобразование Лапласа
Преобразование Лапласапомогает нам решать инженерные задачи. Мы часто описываем и анализируем поведение физических систем, используя обыкновенные дифференциальные уравнения (ОДУ) для исследования и разработки технических продуктов. Преобразование Лапласа дает нам способ ее решения. В этой статье будет изложено основное понятие преобразования Лапласа…
Фильтр производной
В термине D мы обычно аппроксимируем вычисление производной с помощью фильтров, поскольку в действительности мы не можем точно вычислить производную поступающего сигнала ошибки. Кроме того, мы хотим избежать усиления шума или высокочастотной составляющей в сигнале ошибки при вычислении производной.
 Например, мы используем фильтр первого порядка ниже.
Например, мы используем фильтр первого порядка ниже.\(\frac{s}{T_fs+1}\) вместо \(s\) \(\quad\to\quad\) \(C(s) = K_p + K_i \frac{1}{s }+ K_d \frac{s}{T_fs+1}\)
где \(T_f\) — коэффициент фильтра для настройки полосы пропускания фильтра. На рис. 3 показано сравнение АЧХ идеального и отфильтрованного сигналов. На рисунке мы видим разницу в высокочастотной области. Идеальная производная показывает, что амплитуда увеличивается на 20 дБ каждые 10 раз больше частоты. Высокочастотные компоненты в сигнале ошибки чрезмерно усиливаются. Производный фильтр выглядит как фильтр верхних частот. Частотная характеристика аналогична идеальной частоте ниже 160 Гц (\(\приблизительно) 1000 рад/с). Тем не менее, амплитуда остается постоянной, чтобы исключить чрезмерное усиление выше 160 Гц.
Рис. 3: Частотная характеристика члена D.Преимущества ПИД-регулирования
Благодаря своей высокой практичности, ПИД-регулирование долгое время занимало подавляющую долю в обрабатывающей промышленности.
 Мы можем найти приложения ПИД-регулирования повсюду в автомобилях, самолетах, поездах, бытовой технике и промышленных машинах. Почему он так популярен в индустрии? Ключевые преимущества включают в себя:
Мы можем найти приложения ПИД-регулирования повсюду в автомобилях, самолетах, поездах, бытовой технике и промышленных машинах. Почему он так популярен в индустрии? Ключевые преимущества включают в себя:Общий и простой метод
Мы можем применить ПИД-регулирование к любому приложению. Универсальный метод управления имеет большое значение как элементарная технология для компаний, которые могут расширить свое применение.Простота реализации и обслуживания
Мы можем легко спроектировать и внедрить алгоритм ПИД-регулирования в вычислительных устройствах по низкой цене. Мы можем использовать простой алгоритм, не зависящий от спецификации и характеристик объекта, которые пересматриваются или изменяются в процессе разработки или эксплуатации продукта.Простая настройка методом проб и ошибок
Настройка параметров контроллеров с обратной связью является действительно важной задачей для обеспечения желаемого поведения во время разработки конечных продуктов или операций на месте.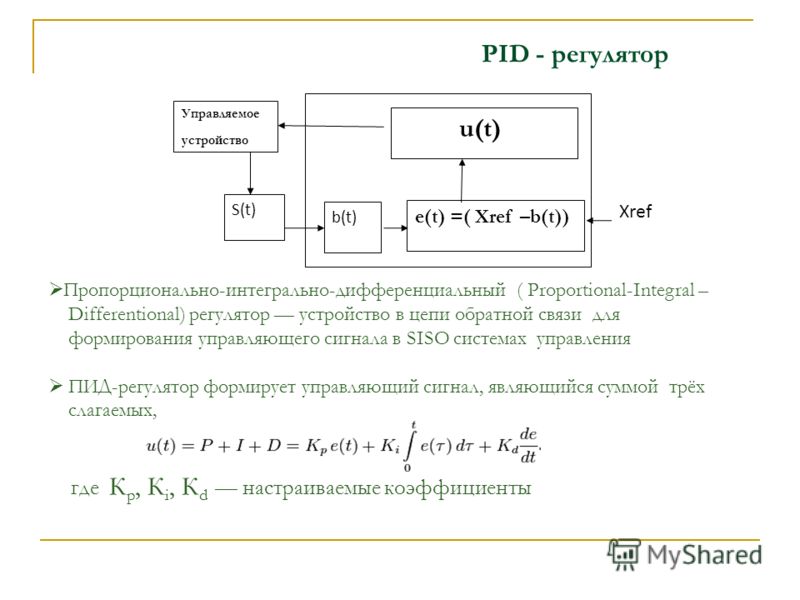 Нам нужна настройка на основе проб и ошибок с опытом и интуицией инженеров/операторов. ПИД-регулирование является дружественным подходом благодаря простому алгоритму с ограниченным числом настраиваемых параметров.
Нам нужна настройка на основе проб и ошибок с опытом и интуицией инженеров/операторов. ПИД-регулирование является дружественным подходом благодаря простому алгоритму с ограниченным числом настраиваемых параметров.Практические характеристики управления
Мы можем получить приемлемые характеристики системы управления, используя ПИД-регулятор. Для установок со сложной (нелинейной) динамикой достижение желаемых характеристик является непростой задачей для всех рабочих диапазонов. В этом случае мы преодолеваем это, используя сопоставленные или запланированные усиления ПИД-регулятора, чтобы гибко учитывать изменения в динамике объекта в каждой рабочей точке.Напротив, настройка ПИД-регулятора иногда требует много времени для сложных систем управления, содержащих сильно нелинейные объекты или многоконтурные ПИД-регуляторы. С теоретической точки зрения ПИД-регулирование является практичным, но не оптимальным методом (современная теория управления охватывает это).

Пример управления скоростью двигателя постоянного тока
Давайте узнаем больше о механизме ПИД-регулирования на простом примере. На рис. 4 показана система управления двигателем постоянного тока. Скорость двигателя постоянного тока регулируется для отслеживания опорной скорости 1 [рад/с] с помощью ПИД-регулятора. Мы можем измерить скорость двигателя с помощью датчика. ПИД-регулятор вычисляет команду напряжения для объекта, т. е. двигателя постоянного тока.
Рис. 4: Система управления двигателем постоянного тока. Рис. 5: Двигатель постоянного тока.Модель установки
Здесь мы создадим модель двигателя постоянного тока для моделирования с обратной связью. Объект представляет собой систему с одним входом и одним выходом (SISO), в которой входом и выходом являются напряжение [В] и скорость двигателя [рад/с] соответственно. Мы будем моделировать поведение двигателя постоянного тока с помощью обыкновенных дифференциальных уравнений (ОДУ), основанных на уравнении движения и уравнении цепи физических законов.

\(\frac{d\omega}{dt}(t) = -\frac{b}{J}\omega(t) + \frac{K_t}{J}i(t)\)
\ (\frac{di}{dt}(t) = -\frac{R}{L}i(t) – \frac{K_e}{L}\omega(t) + \frac{1}{L}v (т)\) 92]
0,02 \(b\) Коэффициент трения [Нм/с] 0,2 \(K_t\) 7 7 Коэффициент трения [Нм/с] 0,1 \(K_e\) Постоянная противо-ЭДС [В/с] 0,1 \(R\) Сопротивление якоря [Ом] 2,0 \ Арматура индуктивность [Гн] 0,5 Моделирование
Давайте подробнее рассмотрим, как члены P, I и D работают с помощью моделирования с обратной связью. Здесь мы увидим три случая: П-управление, ПИ-управление и ПИД-управление.
P-управление
Сначала мы применяем простой P-регулятор с различными коэффициентами P (Kp = 10, 15, 20, 25, 30).
Рис. 8: Результат моделирования П-регулятора.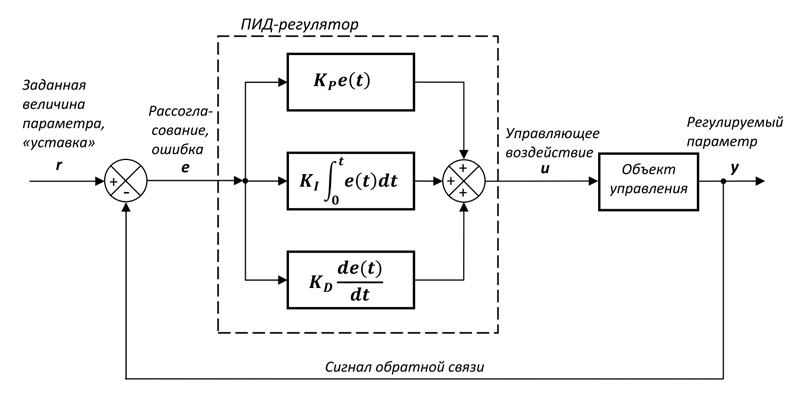 На рис. 8 показан результат моделирования скорости двигателя постоянного тока. Мы видим, что P-регулятор приближает скорость к эталонной 1 рад/с. Значение коэффициента усиления P увеличивается, а установившаяся ошибка уменьшается. Однако мы также можем наблюдать, что вибрационное поведение возникает при более высоком коэффициенте усиления P. В этом случае, используя только П-регулятор, нам трудно добиться хорошего баланса производительности между установившейся ошибкой и переходной характеристикой.
На рис. 8 показан результат моделирования скорости двигателя постоянного тока. Мы видим, что P-регулятор приближает скорость к эталонной 1 рад/с. Значение коэффициента усиления P увеличивается, а установившаяся ошибка уменьшается. Однако мы также можем наблюдать, что вибрационное поведение возникает при более высоком коэффициенте усиления P. В этом случае, используя только П-регулятор, нам трудно добиться хорошего баланса производительности между установившейся ошибкой и переходной характеристикой.ПИ-регулирование
Во-вторых, мы сравним П-регулятор (Kp=10) и ПИ-регулятор (Kp=10, Ki=30), чтобы понять роль интегрального члена. На рис. 9 показан результат моделирования. Как видно на рисунке, член I работает для устранения установившейся ошибки. Кроме того, реакции объекта требуется немного больше времени, чтобы прийти к установившемуся состоянию, в отличие от П-регулятора.
Рис. 9: Результат моделирования ПИ-регулятора (Kp=10, Ki=30).
