
Особенности П, ПИ и ПИД регулирования
Особенности П, ПИ и ПИД регулирования
Наличие в приборах функции выходного устройства ПИД регулирования подразумевает возможность реализации трех типов регулирования: П-, ПИ- и ПИД регулирования.
П регулирование. Выходная мощность прямопропорциональна ошибке регулирования. Чем больше коэффициент пропорциональности, тем меньше выходная мощность при одной и той же ошибке регулирования. Пропорциональное регулирование можно рекомендовать для малоинерционных систем с большим коэффициентом передачи. Для настройки пропорционального регулятора следует сначала установить коэффициент пропорциональности максимальным, при этом выходная мощность регулятора уменьшится до нуля. После стабилизации измеренного значения, следует установить заданное значение и постепенно уменьшать коэффициент пропорциональности, при этом ошибка регулирования будет уменьшаться.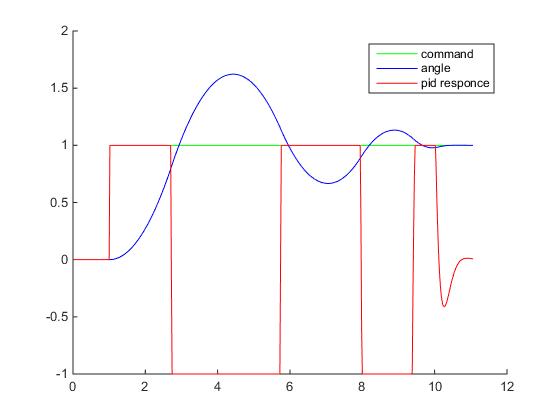
ПИ регулирование. Выходная мощность равна сумме пропорциона- льной и интегральной составляющих. Чем больше коэффициент пропор- циональности, тем меньше выходная мощность при одной и той же ошибке регулирования, чем больше постоянная времени интегрирования, тем медленее накапливается интегральная составляющая. ПИ регулирование обеспечивает нулевую ошибку регулирования и нечувствительно к помехам измерительного канала. Недостатком ПИ регулирования является медленная реакция на возмущающие воздействия. Для настройки ПИ регулятора следует сначала установить постоянную времени интегрирования равный нулю, а коэффициент пропорциональности – максимальным. Затем как при настройке пропорционального регулятора, уменьшением коэффициента пропорциональности нужно добиться появления в системе незатухающих колебаний.
ПИД регулирование. Выходная мощность равна сумме трех состав- ляющих: пропорциональной, интегральной и дифференциальной. Чем больше коэффициент пропорциональности, тем меньше выходная мощность при одной и той же ошибке регулирования, чем больше постоянная времени интегрирования, тем медленее накапливается интегральная составляющая, чем больше постоянная времени дифференцирования, тем сильнее реакция системы на возмущающее воздействие. ПИД-регулятор применяется в инерционных системах с относительно малым уровнем помех измерительного канала. Достоинством ПИД регулятора является быстрый выход на режим, точное удержание заданной температуры и быстрая реакция на возмущающие воздействия. Ручная настройка ПИД является крайне сложной, поэтому рекомендуется использовать функцию автонастройки.
Автонастройка ПИД регулирования в приборах ЧАО “ТЭРА”:
Главное, что определяет качество ПИД регулятора – это его способность точно и быстро выходить на заданную температуру, для чего у всех современных ПИД регуляторов обязательно присутствует функция автонастройки. Стандартных алгоритмов автонастройки ПИД не существуют, на практике каждый производитель применяет свой собственный алгоритм. Поэтому, пользователь, приобретая один и тот же товар под названием “ПИД регулятор” у разных производителей, на своем объекте может получить совсем разные результаты их применения. Основными достоинствами алгоритма автонастройки в ПИД регуляторах ЧАО “ТЭРА” являются:
- автонастройка и выход на регулирование без перерегулирования (у стандартных ПИД регуляторов перерегулирование может достигать 50-70% от заданной температуры, что на некоторых объектах регулирования технологически нежелательно или вообще запрещено)
- продолжительность автонастройки в среднем в 2 раза короче, чем у других производителей (крайне важная характеристика для объектов регулирования с часто изменяемыми свойствами, особенно для инерционных объектов)
Автонастройку можно производить при любом стабильном состоянии объекта регулирования. Кроме того, чем больше разность между начальной и заданной температурой, тем точнее определяются коэффициенты ПИД регулятора. Все коэффициенты ПИД хранятся в энергонезависимой памяти прибора.
Кроме того, чем больше разность между начальной и заданной температурой, тем точнее определяются коэффициенты ПИД регулятора. Все коэффициенты ПИД хранятся в энергонезависимой памяти прибора.
Автонастройку необходимо повторить, если:
- изменилась мощность исполнительного устройства
- изменились физические свойства объекта регулирования (масса, емкость, теплообмен и т.п.)
- объект регулирования заменен другим неидентичным
- при значительном изменении заданной температуры
ПИД-регулятор и встроенный и внешний потенциометр. Что это такое, какой принципы работы? Когда и для каких целей их используют?
Выбирая частотный преобразователь, в технических характеристиках к нему, мы часто видим такие обозначения, как встроенный или внешний «Потенциометр», встроенный «ПИД-регулятор. Рассмотрим, для чего они необходимы, в чём их удобство, преимущество.
Встроенный или внешний потенциометр применяется для оперативного регулирования, настройки выходной частоты частотного преобразователя, которая линейно зависит от его положения относительно нулевой точки.
Второе положение потенциометра, соответствует положению потенциометра, когда его сопротивление максимально, что обычно соответствует максимально заданной частоте, которую можно обычно задать в настройках частотного преобразователя. Максимальную частоту,также задают в зависимости от особенностей электропривода, большинство двигателей сохраняют момент и при работе на частоте сети 60 Гц, что даёт +20% прироста частоты вращения электродвигателя.
Сопротивление внешнего потенциометра выбирается из диапазона 1-10 кОм, характеристику изменения сопротивления от положения ручки желательно выбирать линейную (бывают логарифмические, обратнологарифмические, синусоидальные, косинусоидальные). Подключать, при удалении более чем на один метр, желательно экранированным сигнальным кабелем. И чем дальше мы планируем вынести потенциометр, тем с меньшим сопротивлением его желательно выбрать. Программирование аналогового входа с подключенным к нему потенциометром, обычно заключается в установлении верхнего или нижнего и верхнего пределов регулирования.
Подключать, при удалении более чем на один метр, желательно экранированным сигнальным кабелем. И чем дальше мы планируем вынести потенциометр, тем с меньшим сопротивлением его желательно выбрать. Программирование аналогового входа с подключенным к нему потенциометром, обычно заключается в установлении верхнего или нижнего и верхнего пределов регулирования.
ПИД-регулятор, это программно-аппаратный реализуемый алгоритм обработки входного аналогового сигнала, несущего информацию о состоянии конкретной физической величины (давление, температура, влажность),зависящей от числа оборотов электродвигателя. Основное назначение ПИД-регулятора поддерживать точное значение или удерживать в диапазоне значений управляемой частотным преобразователем физической величины. Девяносто процентов использования ПИД-регуляторов приходится на поддержание постоянного давления в различных гидравлических системах. Расшифруем само понятие ПИД-регулятор – Пропорционально-интегрально-дифференциальный регулятор.
Теперь о его работе.
ПИД – регулятор обеспечивает обратную связь между измеряемой физической величиной и числом оборотов двигателя. Выходное значение ПИД регулятора показывает на какое значение и в какую сторону нужно изменить частоту, чтобы значение физической величины осталось постоянным. Т.е. если ничего не надо менять,на выходе ПИД- регулятора будет ноль.
Пропорциональное звено определяет пропорцию между входным и выходным сигналом. Чем больше мы устанавливаем коэффициент пропорциональности, тем на большее число оборотов, при разнице текущего значения физической величины от заданного, изменится частота вращения двигателя за один такт, при регулировании частотным преобразователем со встроенным ПИД-регулятором. С одной стороны меньше тактов- лучше, а если частоту нужно было уменьшить на 100 Гц, а уменьшили , благодаря завышенному коэффициенту пропорциональности на 200, потом надо поднять опять на 100, а мы можем поднять из-за коэффициента пропорциональности на 200?? Возникает автоколебательный процесс. Можно, конечно точно подбирать, но для всех изменений подобрать его не реально. Для этого существует интегральное звено.
Можно, конечно точно подбирать, но для всех изменений подобрать его не реально. Для этого существует интегральное звено.
Интегральное звено вычисляет действующее значение разницы между заданным и текущим значением физической величины за интегральное время (интегральный коэффициент). Т.е он позволяет найти перерегулирование или недорегулирование на каждом такте, и в зависимости от значения интегрального коэффициента за определенное число тактов свести разницу между заданной и текущей физической величиной к нулю. Допустим мы имели перерегулирование 100 Гц и автоколебательный процесс с неизвестным периодом. Т.е. то больше, то меньше. Если мы возьмём интегральное время меньше чем период автоколебаний, то разовая коррекция будем меньше амплитуды, например – 20 Гц. И за пять тактов постепенно отнимая в каждом такте по 20 Гц, мы добьемся необходимой выходной частоты. (На самом деле пропорциональная, интегральная, составляющая вычисляется на каждом такте, и постоянно корректируется).
Дифференциальное звено измерят скорость изменения отклонения физической величины, и позволяет учитывать это при коррекции выходной частоты. Допустим пропорциональное звено выдало регулирование 200 Гц, необходимо 100 Гц, это нам скорректировало интегральное звено, отняло 100, но на следующем такте отклонение уже изменилось так, что необходимо скорректировать не на 100 Гц , а на 400. У дифференциального звена тоже есть свое время дифференцирования, дифференциальный коэффициент. Поставим большое, можем потерять процесс быстрого изменения отклонения физической величины, поставим малое – придётся больше тактов регулировать. При малом времени, необходимые 400 Гц, будут скорректированы за несколько тактов, а при большом мы можем не увидеть изменения.
У дифференциального звена тоже есть свое время дифференцирования, дифференциальный коэффициент. Поставим большое, можем потерять процесс быстрого изменения отклонения физической величины, поставим малое – придётся больше тактов регулировать. При малом времени, необходимые 400 Гц, будут скорректированы за несколько тактов, а при большом мы можем не увидеть изменения.
Существуют общие правила для программирования всех ПИД-регуляторов.
- Увеличьте пропорциональный коэффициент насколько возможно без возникновения эффекта самовозбуждения.
- Уменьшите интегральное время насколько возможно без возникновения самовозбуждения.
- Увеличьте дифференциальное время насколько возможно без возникновения эффекта самовозбуждения.
Тут есть определённые противоречия, но большинство частотных преобразователей идёт уже с перенастроенными ПИД-регуляторами под работу с насосами. На основании вышеизложенного и пользуясь инструкцией к конкретному преобразователю частоты, можно настроить ПИД-регулятор под необходимый технологический процесс.
принцип работы, схемы, примеры и т.д.
ПИД-регулятор — это прибор для управления технологическим процессом, который используется в методе ПИД-регулирования, основанном на трех законах регулирования: пропорциональном, интегральном и дифференциальном.
ПИД-регуляторОбратите внимание на теорию автоматического регулирования и на приборы для регулирования.
Принцип действия ПИД-регулятора
Интегральный сильфон и переменное ограничение позволяет обеспечить интегральное регулирование. Два дифференциальных сильфона и другое переменное ограничение дает возможность регулятору осуществлять дифференциальное регулирование.
Если выход увеличивается, то входной сильфон и нижний дифференциальный сильфон расширяются. Верхний дифференциальный сильфон расширяется позднее из-за переменного ограничения. Балансир поворачивается, и выход немедленно повышается.
Когда входной сигнал полностью перетечет в верхний дифференциальный сильфон, этот сильфон приложит силу, которая уничтожит силу, приложенную нижним дифференциальным сильфоном. На этой точке дифференциальное регулирование прекращается. В то же время, когда это происходит, сильфон обратной связи расширяется в результате изменения выхода. Изменение выхода подается на интегральный сильфон, который вызывает силу, стремящуюся удержать клапан ближе к соплу. Это действие держит выход на высоком уровне в течение времени, когда переменная процесса не равна уставке. Выход будет продолжать увеличиваться до тех пор, пока переменная процесса не вернется в заданному значению уставки.
На этой точке дифференциальное регулирование прекращается. В то же время, когда это происходит, сильфон обратной связи расширяется в результате изменения выхода. Изменение выхода подается на интегральный сильфон, который вызывает силу, стремящуюся удержать клапан ближе к соплу. Это действие держит выход на высоком уровне в течение времени, когда переменная процесса не равна уставке. Выход будет продолжать увеличиваться до тех пор, пока переменная процесса не вернется в заданному значению уставки.
Где применяется ПИД-регулятор
ПИД-регулятор будет хорошим выбором для работающей на газе печи для подогрева нефти, потому что последующий процесс, куда поступает подогретая нефть, допускает лишь очень маленькие отклонения температуры нефти от заданного значения, а большие запаздывания в процессе подогрева делают очень трудной задачу определения и устранения отклонений.
Газовая печь для подогрева нефтиОдна из причин запаздывания — емкость. Печь имеет способность сохранять большое количество тепла внутри своих стенок. Накопленная теплота передается к нефти, но передача не происходит мгновенно. Если внутренние стенки нагреты слишком сильно, потребуется некоторое время для понижения их температуры, в течение которого нефть может быть перегрета. Если внутренние стенки не достаточно нагреты, то нефть может не получить достаточно тепла.
Накопленная теплота передается к нефти, но передача не происходит мгновенно. Если внутренние стенки нагреты слишком сильно, потребуется некоторое время для понижения их температуры, в течение которого нефть может быть перегрета. Если внутренние стенки не достаточно нагреты, то нефть может не получить достаточно тепла.
Дифференциальная составляющая ПИД-регулятора помогает преодолевать запаздывания посредством выработки эффективных упреждающих воздействий. Интегральная составляющая непрерывно корректирует выходной сигнал при наличии смещения пока регулируемая температура не возвращается к уставке.
Настройка ПИД-регулятора приточной установки | vent-proffi
Настройка ПИД-регулятора (для примера рассмотрим приточную вентиляционную установку с калорифером и системами защиты) производится с одной единственной целью: подобрать его коэффициенты для данной задачи таким образом, чтобы регулятор поддерживал величину физического параметра (температуру приточного воздуха) на заданном уровне.
Допустим текущая температура в помещении 10 °С, а мы хотим, чтобы было 25°С. Мы запускаем вентиляционную установку и регулятор посредством исполнительного механизма (КЗР), начинает управлять степенью нагрева калорифера таким образом, чтобы температура приточного воздуха достигла требуемого уровня. Посмотрим, как это может выглядеть.
На данном рисунке красным цветом показана идеальная кривая изменения температуры в помещении при работе регулятора.
Температура плавно, без скачков, но в тоже время достаточно быстро подходит к заданному значению. Оптимальное время, за которое температура может достигнуть заданной отметки, определить довольно сложно, но по факту должно быть в пределах 15-20 минут.
Оно зависит от многих параметров: размеров помещения, мощности и производительности вентустановки и др. В теории это время можно рассчитать, но на практике чаще всего это определяется экспериментально.
Чёрным цветом показан график изменения температуры в том случае, если коэффициенты подобраны совсем плохо.
Система теряет устойчивость. Регулятор при этом разбалансируется и значение температуры попадает в диапазон защиты вентиляционной установки от заморозки (если работа в зимнем режиме), что приводит к остановке и перезапуску вентиляционной системы согласно прописанному алгоритму.
На этом рисунке показаны графики, далёкие от идеального. В первом случае наблюдается сильное перерегулирование: температура слишком долго «скачет» относительно уставки, прежде чем достичь её.
Во втором случае регулирование происходит плавно, но слишком медленно. Данные кривые тоже не идеальны, но могут быть сочтены за удовлетворительные.
В процессе настройки регулятора, пользователю необходимо стремиться получить кривую, близкую к идеальной. Однако, в реальных условиях сделать это не так-то просто — приходится долго подбирать коэффициенты.
Поэтому зачастую останавливаются на «приемлемой» кривой регулирования. Например, в нашем случае нас могли бы устроить коэффициенты регулятора, при которых заданная температура достигалась бы за 15-20 минут с максимальным перерегулированием (максимальными «скачками» температуры) 2 °С.
А вот более длительное время достижение уставки — более часа и максимальные «скачки» температуры 5 °С — нас бы не устроили.
Далее поговорим о том, как подобрать коэффициенты для достижения оптимального регулирования. Порядок настройки коэффициентов:
Пропорциональный коэффициент.
Выставляем дифференциальный и интегральный коэффициенты в ноль, тем самым убирая соответствующие составляющие.
Пропорциональный коэффициент выставляем в 1. Далее нужно задать значение уставки температуры отличное от текущей и посмотреть, как регулятор будет менять степень нагрева калорифера, чтобы достичь заданного значения.
Характер изменения можно отследить «визуально», либо можно регистрировать в таблицу измеренное значение температуры каждые 1-2 минуты и по полученным значением построить график.
Затем нужно проанализировать полученную зависимость в соответствии с рисунком:
при большом перерегулировании, необходимо уменьшать пропорциональный коэффициент, а если регулятор долго достигает уставки — увеличивать.
Так убавляя-прибавляя коэффициент необходимо получить график регулирования как можно ближе к идеальному. Поскольку достичь идеала удастся вряд ли, лучше оставить небольшое перерегулирование (его можно будет скорректировать другими коэффициентами), чем длительное нарастание графика.
Настраиваем дифференциальный коэффициент.
Постепенно увеличивая дифференциальную составляющую, необходимо добиться уменьшения или полного исчезновения «скачков» графика (перерегулирования) перед выходом на уставку.
При этом кривая должна стать еще больше похожа на идеальную. Если слишком сильно завысить дифференциальный коэффициент, температура при выходе на уставку будет расти не плавно, а скачками (как показано на рисунке).
Настраиваем интегральный коэффициент
При настройке двух предыдущих коэффициентов можно получить практически идеальную или близкую к ней кривую регулирования, удовлетворяющую требуемым условиям.
Однако, как правило возникает так называемая «статическая ошибка». При этом в нашем примере температура стабилизируется не на заданном значении 25 °С, а на несколько меньшем значении.
При этом в нашем примере температура стабилизируется не на заданном значении 25 °С, а на несколько меньшем значении.
Дело в том, что если температура станет равной уставке (то есть разность текущей и заданной температур станет равна 0), то пропорциональная и дифференциальная составляющая будут равны нулю (см. функцию преобразования ПИД-регулятора).
При этом мощность регулятора тоже станет равна нулю и исполнительный механизм (КЗР) закроет подачу теплоносителя в калорифер, и он начнёт остывать.
Для того чтобы исключить этот эффект, используют интегральную составляющую. Её необходимо постепенно увеличивать до исчезновение статической ошибки. Однако, чрезмерное её увеличение тоже может привести к возникновению скачков температуры.
Действительно, ПИД — это классика регулирования, но требует для каждого конкретного объекта регулирования нахождения (чаще всего эмпирического) коэффициентов всех трех составляющих.
Если коэффициенты пропорциональной и дифференциальной части еще как-то можно прикинуть, то коэффициент интегральной части определяется экспериментально по времени реакции объекта на единичное воздействие.
Чаще всего достаточно добиться такого вида переходного процесса, который устроит пользователя в условиях текущей задачи.
|
В самом простом варианте ПИД-регулятор имеет два входа. На один вход поступает сигнал задания величины параметра технологического процесса, этот сигнал задания еще называют «уставкой». На второй вход ПИД-регулятора преобразователя частоты поступает сигнал обратной связи. В зависимости от величины и знака рассогласования между этими сигналами на выходе ПИД-регулятора формируется сигнал, который изменяет выходную частоту преобразователя частоты таким образом, чтобы заданное значение технологического параметра поддерживалось с заданной точностью и с заданным качеством. Например, если давление в водопроводе будет меньшим, нежели мы задали, то ПИД-регулятор увеличит выходную частоту преобразователя частоты, что приведет к увеличению скорости и, соответственно, производительности насоса и давление в системе начнет увеличиваться. Если же давление будет больше величины уставки, то ПИД-регулятор уменьшит выходную частоту и давление уменьшится. Это самое простое объяснение принципа работы ПИД-регулятора, хотя в действительности необходимо учитывать еще некоторые моменты, которые мы рассмотрим ниже. Выходной сигнал ПИД-регулятора преобразователя частоты состоит из суммы трех составляющих: пропорциональной, интегральной и дифференциальной составляющей. О пропорциональной составляющей мы упоминали выше – это рассогласование между величиной уставки и сигналом обратной связи. Не вдаваясь в подробности, просто примем к сведению, что при использовании только пропорциональной составляющей всегда будет иметь место статическая ошибка. Например, в замкнутой системе поддержания давления в системе водоснабжения реальное давление будет меньше заданного. Однако чрезмерное увеличение коэффициента усиления пропорционального регулятора преобразователя частоты приводит к автоколебаниям и к неустойчивой работе замкнутой системы регулирования. Поэтому на практике поступают следующим образом: увеличивают коэффициент усиления пропорциональной составляющей до появления автоколебаний, и после этого уменьшают этот коэффициент на 20 – 30%. Для устранения статической ошибки используют интегральный регулятор, в котором, изменяя время интегрирования, получают требуемую точность и качество регулирования. Что касается дифференциальной составляющей ПИД-регулятора преобразователя частоты, то она используется только в высоко динамичных системах регулирования скорости, положения, синхронизации и т.д. Поэтому во многих преобразователях частоты используются только ПИ-регуляторы, которых вполне достаточно для решения большинства задач, возникающих в замкнутых системах регулирования. Мы привыкли к тому, что системы управления современных преобразователей частоты, в том числе и ПИД-регуляторы, реализованы на микропроцессорной технике. Однако ПИД-регуляторы могут быть не только цифровыми, но и аналоговыми, о которых буквально несколько слов. В свое время автор этих строк занимался разработкой ПИД-регуляторов на операционных усилителях для прецизионных лентопротяжных механизмов. И вот, один главный-конструктор, программист по образованию, не мог терпеть аналоговую схемотехнику и решил разработать цифровой регулятор скорости. Где-то с полгода его программисты «возились» с цифровым ПИД-регулятором и в конце концов этот главный-конструктор вынужден был обратиться к нам, потому, что его цифровой регулятор скорости не обеспечивал необходимое качество регулирования. Буквально через неделю мы разработали, изготовили и настроили аналоговый регулятор скорости, который удовлетворял все требования технического задания. И каково же было удивление этого главного-конструктора, когда он увидел, что регулятор скорости был реализован буквально на одном операционном усилителе. При регулировании скорости может оказаться так, что скорость двигателя будет поддерживаться с заданной точностью, но несколько оборотов будет с большой скоростью, а несколько с меньшей. Или пол-оборота с большей, а пол-оборота с меньшей скоростью, а в сумме получается требуемая точность. Для прецизионных механизмов важна не только точность поддержания скорости, но и коэффициент нестабильности скорости, который как раз и показывает, как изменяется скорость в течение одного оборота. Для того, чтобы ПИД-регулятор мог эффективно реагировать на самые малые изменения скорости ему нужен сигнал обратной связи, точность измерения скорости которого на порядок выше требуемого коэффициента нестабильности скорости. Вот именно поэтому в регуляторах скорости в качестве датчика обратной связи используются цифровые датчики скорости с высокой разрешающей способностью, которые еще называют энкодерами. Не сложно подсчитать, что 10% времени контроллер ПИД-регулятора «не видит» датчика скорости, а это значит, что какими бы «крутыми» небыли программисты, какую б высокую разрешающую способность не имел энкодер, а получить коэффициент нестабильности скорости меньше 10% не получится. Вот именно поэтому у того главного-конструктора цифровой регулятор скорости не смог обеспечить требуемое качество регулирования. Некоторые разработчики шкафов управления используют внешний ПИД-регулятор, хотя преобразователи частоты имеют штатные ПИД-регуляторы, которые ничем не хуже, а в большинстве случаев намного лучше внешних. А некоторые преобразователи частоты вообще имеют функцию автоматической настройки ПИД-регулятора, что само по себе очень удобно для потребителя. Использование внешних регуляторов только удорожает частотно-регулируемый электропривод на базе преобразователей частоты и может быть использовано только в тех случаях, когда внешний контроллер, на котором реализован ПИД-регулятор, обрабатывает не только сигнал обратной связи, но и еще какие-то сигналы, которые каким-то образом влияют на качество регулирования. В системах автоматического регулирования с очень большой постоянной времени может оказаться, что штатный ПИД-регулятор будет работать неудовлетворительно. В заключение хочу сказать, что все преобразователи частоты и все их ПИД-регуляторы в той или в иной мере хороши, но при их покупке не ставьте во главу угла минимальную стоимость, а в первую очередь оценивайте их технические характеристики. |
 Для того, чтобы уменьшить статическую ошибку необходимо увеличить коэффициент усиления П-регулятора.
Для того, чтобы уменьшить статическую ошибку необходимо увеличить коэффициент усиления П-регулятора.
 Однако это совсем не говорит о том, что его программисты были плохими, а мы «крутыми», просто при подходе к выбору схемотехнического решения не было учтено одно очень важное обстоятельство, о котором очень коротко в следующем абзаце.
Однако это совсем не говорит о том, что его программисты были плохими, а мы «крутыми», просто при подходе к выбору схемотехнического решения не было учтено одно очень важное обстоятельство, о котором очень коротко в следующем абзаце. А теперь давайте, обратим внимание на время, через которое микропроцессор ПИД-регулятора будет считывать показания датчика скорости. В современном «навороченном» преобразователе частоты FC 302 компании Данфосс время сканирования на вход составляет одна миллисекунда (1 ms), в более старых разработках – 10 ms. Я не думаю, что в те далекие времена, когда главный-конструктор пытался разработать цифровой регулятор скорости, время сканирования на вход было меньшим 10 ms и для примера возьмем именно 10 ms. Пусть двигатель вращается со скоростью 10 оборотов за секунду, тогда время, в течение которого двигатель сделает один оборот, составит 100 ms.
А теперь давайте, обратим внимание на время, через которое микропроцессор ПИД-регулятора будет считывать показания датчика скорости. В современном «навороченном» преобразователе частоты FC 302 компании Данфосс время сканирования на вход составляет одна миллисекунда (1 ms), в более старых разработках – 10 ms. Я не думаю, что в те далекие времена, когда главный-конструктор пытался разработать цифровой регулятор скорости, время сканирования на вход было меньшим 10 ms и для примера возьмем именно 10 ms. Пусть двигатель вращается со скоростью 10 оборотов за секунду, тогда время, в течение которого двигатель сделает один оборот, составит 100 ms. В аналоговом регуляторе скорости «обрабатывается» каждый импульс энкодера, что позволят получить более высокое качество регулирования скорости.
В аналоговом регуляторе скорости «обрабатывается» каждый импульс энкодера, что позволят получить более высокое качество регулирования скорости. Например, на очистных сооружениях с помощью преобразователя частоты регулируют производительность воздуходувки для поддержания оптимального уровня кислорода в воде, при котором аэробные бактерии «работают» наиболее эффективно. Если в качестве обратной связи использовать датчик содержания кислорода в воде, то обычный ПИД-регулятор будет работать практически в старт/стопном режиме. То есть, при пониженном содержании кислорода ПИД-регулятор повысит скорость воздуходувки до номинальной, на которой она будет работать достаточно длительное время, ведь вода насыщается кислородом очень медленно. Как только уровень кислорода достигнет заданного значения – то воздуходувка остановится. Такой режим работы частотно-регулируемого электропривода не дает экономии электроэнергии и в таких случаях использование внешнего контроллера, на котором реализованы совсем другие подходы к регулированию, оправдано.
Например, на очистных сооружениях с помощью преобразователя частоты регулируют производительность воздуходувки для поддержания оптимального уровня кислорода в воде, при котором аэробные бактерии «работают» наиболее эффективно. Если в качестве обратной связи использовать датчик содержания кислорода в воде, то обычный ПИД-регулятор будет работать практически в старт/стопном режиме. То есть, при пониженном содержании кислорода ПИД-регулятор повысит скорость воздуходувки до номинальной, на которой она будет работать достаточно длительное время, ведь вода насыщается кислородом очень медленно. Как только уровень кислорода достигнет заданного значения – то воздуходувка остановится. Такой режим работы частотно-регулируемого электропривода не дает экономии электроэнергии и в таких случаях использование внешнего контроллера, на котором реализованы совсем другие подходы к регулированию, оправдано. Может оказаться, что очень хороший преобразователь частоты на «три копейки» дороже, но он окупится быстрее и даст большую экономию электроэнергии. Покупайте преобразователи частоты в нашем сервисном центре – и дешевле и надежнее.
Может оказаться, что очень хороший преобразователь частоты на «три копейки» дороже, но он окупится быстрее и даст большую экономию электроэнергии. Покупайте преобразователи частоты в нашем сервисном центре – и дешевле и надежнее.ПИД регулирование в частотных преобразователях. Настройка
Для процессов системы требуется способность параметров к реагированию на внешнее действие и поддержание системных постоянных величин. Для примера, система насосов с клапанами отвода. Для каждого клапана поддержание потока в постоянном виде обеспечивает постоянное давление в трубах. Помпа в системе приводится в действие приводом, при открывании клапана скорость двигателя увеличивается и снижается при закрытии, чтобы поддерживать давление в трубах на одном уровне.
Настраивание ПИД-регулятора общего вида
Для такого поддержания давления существует прибор, который называется регулятором задания. Давление в трубах на датчике идет в сравнение с параметром заданного давления. Регулятор сравнивает системное давление с давлением задания, определяет задачу скорости для двигателя для изменения ошибки. Простой вид регулятора применяет план действий ПИД-регулирования. В нем применяются три составляющие типа регуляторов для удаления ошибки: дифференциальный, интегральный и пропорциональный регулятор.
Регулятор сравнивает системное давление с давлением задания, определяет задачу скорости для двигателя для изменения ошибки. Простой вид регулятора применяет план действий ПИД-регулирования. В нем применяются три составляющие типа регуляторов для удаления ошибки: дифференциальный, интегральный и пропорциональный регулятор.
Регулятор пропорционального типа
Такой регулятор – главный, скорость задается в прямой зависимости от ошибки. При применении пропорционального регулятора система будет иметь ошибку. Малые значения коэффициента регулятора пропорционального типа дают вялость системы, а высокие параметры к колебаниям и нестабильности системы.
Регулятор интегрального типа
Такой регулятор применяется для удаления ошибки. Скорость увеличится до удаления ошибки (снизится при негативной ошибке). Небольшие значения суммирующей составляющей слишком оказывают влияние на деятельность регулятора в общем. При установлении больших значений происходит промахивание системы, она функционирует с перерегулированием.
Регулятор дифференциального типа
Такой регулятор измеряет скорость корректировки ошибки, применяет для повышения системного быстродействия, увеличивает регуляторное быстродействие в общем. Во время увеличения быстродействия регулятора повышается перерегулирование. Это обуславливает к системной нестабильности. Во многих случаях составляющая дифференциальная становится равной нулю или близкой к наименьшему значению для того, чтобы предотвратить это состояние. Она бывает полезной в позиционирующей системе.
Работа регулятора в обратном и прямом действии
Множество регуляторов имеют принцип прямого действия. Повышение скорости двигателя приводит к повышению переменной величины процесса. Это случай в системе насосов, давление это величина переменная процесса. Повышение скорости двигателя обуславливает повышение давления. Во многих системах повышение скорости двигателя обуславливает к снижению параметра переменной процесса. Температура вещества, которое обдувается вентиляционной системой теплообменника – процессная переменная величина: при повышении скорости вентиляционной системы температура вещества снижается. В этом разе нужно применить регулятор действия обратного вида.
В этом разе нужно применить регулятор действия обратного вида.
Настраивание ПИД-регулятора
Для моторной управляемости системы настраивание ПИД-регулятора бывает сложным процессом. Расскажем, какие шаги для настройки могут сделать проще эту процедуру.
- Определите значение дифференциальной и интегральной равной нулю. Определите наибольшую скорость и контролируйте системную реакцию.
- Повышайте составляющую прямопропорционально и выполните первый пункт. Продолжайте действия до момента начала процесса с автоматическими колебаниями возле точки определения скорости.
- Снижайте пропорциональную величину, пока система не стабилизируется. Волны колебаний начнут затухать.
- Определите пропорциональную величину около 15% меньше этого постоянного пункта.
- Определяйте наибольшую скорость прерывисто, повышайте суммирующую составляющую до начала уменьшения колебаний скорости перед стабильным состоянием системы. Снижайте суммирующую составляющую до достижения системой определенной скорости без ошибки и колебаний.

- Во многих системах настраивание составляющей дифференциального вида не нужно. Если нужно быстродействие системы больше, то можно достигнуть этого путем настройки составляющей дифференциального вида. Устанавливайте скорость по интервалам, повышайте составляющую дифференциального вида, пока не стабилизируется система с наименьшим временем действия (повышайте медленно, избегая состояния нестабильности). Система станет оптимальной при одном перерегулировании.
- Контролируйте стабильность системы, устанавливая значения скорости с интервалами и периодами для гарантированной стабильности системы при плохом исполнении задания.
Настраивание датчика на 20 миллиампер ПИД-регулированием
1. Действия в программном меню
Управляющая панель частотного преобразователя А300 состоит из 3-уровневой структуры:
- Группы опциональных значений (1 уровень).
- Опциональные значения (2 уровень).
- Параметр опционального значения.
2.
 Настраивание характеристик электромотора и определение направления момента
Настраивание характеристик электромотора и определение направления моментаУстановить метод управления частотником в значении Р0-02:
- Р0-02=0 (настройка завода, пульт преобразователя).
- Р0-02=1 (входные команды внешнего управления D1-D7).
Установить характеристики номинального значения электромотора (применяйте параметры с таблички и паспорта электромотора):
- Мощность номинала Р1-01= установите значения.
- Напряжение номинала Р1-02= установите значения (по заводским настройкам 380 вольт).
- Ток номинала Р1-03= установите значения.
- Частота номинала Р1-04= установите значения (по заводским настройкам 50 герц).
- Обороты номинального значения Р1-05= установите значения.
После подсоединения и введения параметров нужно проконтролировать направление вращающего момента электромотора. После отключения меню программы на экране покажется 50 герц, клавишей «вниз» установите наименьшую частоту для задания направления вращающего момента. Для пуска мотора нажмите клавишу «пуск» (параметр Р0-02=0), определите направление момента вращения, затормозите мотор, нажав клавишу «стоп».
Для пуска мотора нажмите клавишу «пуск» (параметр Р0-02=0), определите направление момента вращения, затормозите мотор, нажав клавишу «стоп».
Если вращение не совпадает с направлением, то измените две любые фазы питания мотора (замену фаз производить при отключенном частотнике) или поменяйте параметр настройки Р0-09= (0-вперед, 1-назад). Еще раз проконтролируйте момент вращения, нажав клавишу «пуск», если направление момента вращения совпадает, то затормозите мотор, нажав клавишу «стоп». Нажмите клавишу «вверх» и возвратите настроенную частоту 50 герц.
3. Подсоединение датчика (выход на 20 миллиампер)
- Установку производить при выключенном питании частотного преобразователя.
- Напряжение датчика подсоединить к контакту «+24В», сигнал соединить с контактом «AI1», установить перемычку на контакты «COM» и «GND».
Переставить соединение «J1» в состояние «I».
4. Контроль обратной связи
- Подключите напряжение на частотный преобразователь, на экране возникнет подсветка 50 герц.
- Нажмите клавишу «сдвиг» 2 раза.
- На экране будет параметр обратной связи в интервале 0-10 (0-20 мА), зависит от настраиваемого параметра.
Связь обратного вида (4 мА).
- После подтверждения обратной связи нажмите три раза клавишу «сдвиг», появится на экране 50 герц.
- Установите наименьшее значение сигнала входа в величине Р4-13=2.00 (4 мА).
5.Как настраивать значение параметра ПИД-регулирования.
- Установите источник основной частоты Р0-03=8 (частоту определяет ПИД-регулятор).
- Поставьте значение ПИД-регулятора в значение РА-01= результат поддерживаемой величины в процентах (от 0 до 100%) от интервала датчика, РА-01= (результат поддерживаемого параметра/интервал датчика)*100%.
Пример установки значения:
Подсоединен датчик давления на 16 бар с сигналом выхода от 4 до 20 мА. Для давления в 10 бар нужно установить значение
РА-01=(10/16)*100%=62,5%
Произведите тестовый пуск. Проверяйте поддерживаемое значение параметра по приборам, дублирующим измерения (ротаметр, термометр, манометр). Если система регулировки функционирует нестабильно или долгий отклик на замену проверяемого параметра, то применяйте настройки значений РА-05, -06, -07. Эти значения предназначены для точной настройки ПИД-регулятора.
Если система регулировки функционирует нестабильно или долгий отклик на замену проверяемого параметра, то применяйте настройки значений РА-05, -06, -07. Эти значения предназначены для точной настройки ПИД-регулятора.
Пример использования регулирования ПИД
Данные
- Механизм вентиляторного управления.
- Характеристика градуировочная датчика давления, интервал 1000-5000 Па, ток 4-20 мА.
- Значение давления 1500 Па.
- Мощность механизма и инерционные данные вентилятора отсутствуют.
Наружные подключения
Датчик обратной связи подсоединен к токовому входу аналогового типа, датчик значения уставки к входу аналогового типа напряжения.
Обратная связь
Датчик связи определен по токовому выходу, входом связи обратного вида применяется токовый вход. Задается РR.10-00=02 (обратная связь с минусом по входу, повышение частоты выхода, повышает давление).
Отградуированная характеристика датчика
Сигнал связи обратного вида в масштабе
Вход связи обратного вида не создает масштаб по усилению и смещению. Применяя параметр PR10-01 можно изменять значение сигнала связи обратного вида в расчетах.
Применяя параметр PR10-01 можно изменять значение сигнала связи обратного вида в расчетах.
Применение параметра PR10-01 для корректировки значения сигнала связи обратного типа.
Значением PR10-01 можно корректировать значение сигнала связи обратного вида, который применяется в вычислениях. Интервал пропорциональности 0-10, по настройкам завода 1.
Сигнал связи обратного вида повышается в 2 раза перед установкой в ПИД-регулятор. Это равно снижению интервала входа в 2 раза.
Сигнал связи обратного вида снижается в 2 раза перед установкой в регулятор, это эквивалентно увеличению интервала входа в 2 раза. Сейчас интервал ограничен значением датчика.
Пример установки значения параметра PR10-01 (масштаб усиления обратной связи).
Интервал действия датчика:
-1000Ра – 5000Ра.
Наибольшее давление функционирования: 2000Ра.
Применяемая часть интервала работы датчика (закрепленная): -1000Ра-2000Ра.
Это будет равно: 2000Ра –(-1000Ра)
5000Ра –(-1000Ра) = 50%
Если интервал действия не больше 2000Ра с датчиком, то величина параметра
PR10-01 = 1/50%=2
Формула вычисления параметра PR10-01.

Наибольший сигнал датчика: MaxVal
Наименьший сигнал датчика: MinVal
Наибольший нужный сигнал связи обратного вида MaxFBVal
Величина значения ПИД (установленная частота).
Установленную частоту можно изменять операторами наклона и перемещения опции преобразования.
Направление момента вращения установки вентилятора не изменяется, лучше применять AVI вход с заданием значения PR 02-00=01.
PR10-01 (наибольшая частота).
Задать в PR01-00 величину наибольшей частоты механизма вентиляции (PR01-00 = 50 герц).
Наименьшая частота.
Наименьшая частота не оказывает влияния на действие регулировки.
Наклон и перемещение опции преобразования.
Задать PR04-00 AVI перемещение интервала.
PR04-01 AVI полярность.
PR04-02 AVI корректировка наклона.
Вращение производится в одну сторону, PR04-03 = 0 (по заводским настройкам).
Величина уставки.
Для установки величины входа интервал частоты рассчитывается 0-100%.
Установка значения уставки.
При функционировании вентилятора давлению в 1500 Ра равен сигнал датчика 10,67 мА. Величине уставки 1500 Ра равна частота выхода 42%*50 герц = 21 герц и 84%*50 герц = 42 герц.
Можно устанавливать значение в Ра. Если 100% интервала равно 2000 Ра, то при коэффициенте 00-05 = 2000/Fmax = 2000/50 = 40, установленная величина 1500 и задается 1500 Ра.
Интервал частоты выхода.
Верхняя граница частоты выхода при регулировке определяется формулой:
Fmax=Pr01-00хPr10-07.
ПИД-регулирование
Ускорение – замедление.
При взаимодействии с регулированием ПИД нужно время ускорения и замедления устанавливать минимальным для качественной регулировки.
Настраивание регулятора:
- Задать величину I для легкого отклика, без перерегулировки.
- Значение параметра для вентилятора не нужно, из-за замедления процесса.
- Задать другие значения величин.
Советы по настраиванию:
- Повышение Р разгоняет процесс, снижает ошибки.

- При большом Р появляется неустойчивость процесса.
- Снижение величины I ускоряет процесс, делает нестабильным.
- Быстрота дает снижение Р и I.
- Замедление вентилятора определяет большего значения Р.
- Задайте время ускорения и замедления наименьшим.
: типы, что это такое и как работает
ПИД-регулятор – это прибор, используемый в приложениях промышленного управления для регулирования температуры, расхода, давления, скорости и других переменных процесса. PID, что означает пропорциональная интегральная производная, контроллеры используют механизм обратной связи контура управления для управления переменными процесса и являются наиболее точным и стабильным контроллером. В этой статье более подробно объясняется, как работает PID.
ПИД-регулирование – это хорошо зарекомендовавший себя способ привести систему к заданному положению или уровню.Это практически повсеместное средство контроля температуры и находит применение во множестве химических и научных процессов, а также в автоматизации.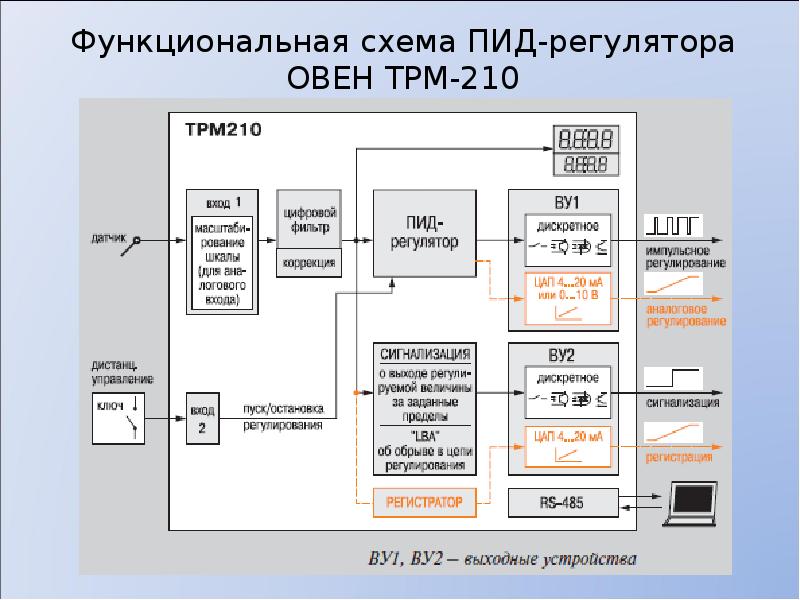 ПИД-регулирование использует обратную связь управления с обратной связью, чтобы поддерживать фактический выходной сигнал процесса как можно ближе к целевому или заданному выходному значению.
ПИД-регулирование использует обратную связь управления с обратной связью, чтобы поддерживать фактический выходной сигнал процесса как можно ближе к целевому или заданному выходному значению.
Что такое ПИД-регулятор температуры?
ПИД-регулятор температуры, как следует из его названия, представляет собой инструмент, используемый для регулирования температуры, в основном без значительного участия оператора.ПИД-регулятор в системе контроля температуры принимает датчик температуры, такой как термопара или RD, в качестве входного сигнала и сравнивает фактическую температуру с желаемой контрольной температурой или заданным значением. Затем он предоставит вывод для элемента управления.
Что такое цифровой ПИД-регулятор?
Цифровой ПИД-регулятор считывает сигнал датчика, обычно с термопары или RTD, и связывает измерения с техническими единицами измерения, такими как градусы Фаренгейта или Цельсия, которые затем отображаются в цифровом формате.
История ПИД-регулятора
Первая эволюция ПИД-регулятора была разработана в 1911 году Элмером Сперри. Однако только в 1933 году компания Taylor Instrumental Company (TIC) представила первый пневматический контроллер с полностью настраиваемым пропорциональным контроллером. Несколько лет спустя инженеры по управлению устранили ошибку установившегося состояния, обнаруженную в пропорциональных контроллерах, установив точку на какое-то искусственное значение, пока ошибка не была равна нулю. Этот сброс «интегрировал» ошибку и стал известен как пропорционально-интегральный регулятор.Затем, в 1940 году, компания TIC разработала первый пневматический контроллер ПИД-регулятора с производным действием, который уменьшил проблемы с перерегулированием. Однако только в 1942 году, когда были введены правила настройки Зиглера и Николса, инженеры смогли найти и установить соответствующие параметры ПИД-регуляторов. К середине 1950-х годов автоматические ПИД-регуляторы получили широкое распространение в промышленности.
Однако только в 1933 году компания Taylor Instrumental Company (TIC) представила первый пневматический контроллер с полностью настраиваемым пропорциональным контроллером. Несколько лет спустя инженеры по управлению устранили ошибку установившегося состояния, обнаруженную в пропорциональных контроллерах, установив точку на какое-то искусственное значение, пока ошибка не была равна нулю. Этот сброс «интегрировал» ошибку и стал известен как пропорционально-интегральный регулятор.Затем, в 1940 году, компания TIC разработала первый пневматический контроллер ПИД-регулятора с производным действием, который уменьшил проблемы с перерегулированием. Однако только в 1942 году, когда были введены правила настройки Зиглера и Николса, инженеры смогли найти и установить соответствующие параметры ПИД-регуляторов. К середине 1950-х годов автоматические ПИД-регуляторы получили широкое распространение в промышленности.
Практическая динамика процесса ПИД-регулирования с пропорциональными регуляторами давления
Рационально мыслящие инженеры-конструкторы понимают важность компетентных инженеров по контролю, когда приходит время реализовать разработанный ими процесс. Потратив месяцы или годы на проектирование, спецификацию и обеспечение необходимого оборудования, инженеры-проектировщики должны доверить инженеру по системам управления реализацию концепции и автоматизацию повторяемого процесса. В то время как сотрудничество между инженерными дисциплинами обязательно продолжается, инженеры-проектировщики, которые развивают практическое понимание управления контурами ПИД-регулирования, лучше всего подходят для определения и обеспечения оптимального оборудования, что повышает вероятность успешных внедрений и может значительно сократить время возврата инвестиций.
Потратив месяцы или годы на проектирование, спецификацию и обеспечение необходимого оборудования, инженеры-проектировщики должны доверить инженеру по системам управления реализацию концепции и автоматизацию повторяемого процесса. В то время как сотрудничество между инженерными дисциплинами обязательно продолжается, инженеры-проектировщики, которые развивают практическое понимание управления контурами ПИД-регулирования, лучше всего подходят для определения и обеспечения оптимального оборудования, что повышает вероятность успешных внедрений и может значительно сократить время возврата инвестиций.
Каждый раз, когда мы изменяем наше поведение на основе предыдущего результата, мы создаем контур управления. Как люди, мы постоянно создаем новые контуры управления и настраиваем старые, пытаясь регулировать наш опыт. Мы регулируем скорость наших автомобилей, варьируя расход топлива на основе показаний спидометра. Мы гуляем на улице, измеряем температуру и добавляем или убираем одежду, чтобы создать комфорт. Человеческий мозг – самый плодовитый контроллер петель из существующих. Естественно, мы применяем аналогичные методы для управления нашими производственными и производственными процессами.
Человеческий мозг – самый плодовитый контроллер петель из существующих. Естественно, мы применяем аналогичные методы для управления нашими производственными и производственными процессами.
В подавляющем большинстве промышленных контуров управления используется комбинация ПИД-регулирования. PID – это аббревиатура от «пропорциональный», «интегральный» и «производный». Эти математические термины справочные алгоритмы, которые инженеры по контролю используют для управления сигналами срабатывания для достижения желаемых результатов процесса. Контуры промышленных процессов включают в себя несколько датчиков и различные клапаны, цилиндры или другие устройства, требующие срабатывания. Типичное использование контура ПИД включает температуру, давление, расход, химический состав, скорость и уровень.Инженер по управлению использует алгоритмы ПИД для записи данных процесса и расчета уставок для различных исполнительных устройств. Задача состоит в том, чтобы преодолеть множество переменных и достичь желаемой уставки в нужное время с минимальным превышением или недостижением.
Обычным компонентом многих процессов контура управления является пропорциональный контроллер. Это устройство требует уставки от главного контроллера, ожидая, что он будет генерировать одинаковый выходной сигнал. Главный контроллер может использовать ПИД-регулятор для вычисления уставки пропорционального регулятора.Однако современные пропорциональные контроллеры включают в себя собственный регулируемый контур ПИД-регулирования для достижения заданной уставки.
Именно в контексте пропорциональных регуляторов в данной статье исследуется и обсуждается практическая динамика процесса ПИД-регулирования.
Понимая основную теорию ПИД-регулирования и поведенческие тенденции, инженеры-конструкторы могут оценить нюансы и приоритеты каждого конкретного процесса и выбрать оптимальные пропорциональные регуляторы. Скорость, точность, разрешение и стабильность влияют друг на друга, и каждый из них изменяется при изменении настроек PID.Какой из них самый важный? Аналоговые пропорциональные контроллеры работают быстро, но предлагают ли устройства на базе микроконтроллеров какие-либо преимущества? Может ли пропорциональный контроллер обеспечить гибкость и производительность?
Контуры ПИД-регулятора предоставляют инженерам системы управления настраиваемый метод управления многочисленными условиями, от скорости до температуры и всего, что между ними. Авторитет цикла изменяет поведение устройства для поддержания стабильного вывода и повышения скорости отклика. Наиболее распространенными пропорциональными регуляторами являются электронные регуляторы давления (EPR), состоящие из наполняющих и выпускных клапанов, встроенного датчика и ПИД-регуляторов для регулировки характеристик отклика.EPR требует только внешней команды уставки, чтобы стать схемой управления с обратной связью. Уставка постоянно сравнивается с показаниями бортового преобразователя для получения «ошибки». Особая цель промышленных контуров ПИД-регулирования состоит в том, чтобы постоянно уменьшать и поддерживать значение ошибки на уровне нуля или близком к нему. Итак, как каждый алгоритм способствует достижению этой цели?
Авторитет цикла изменяет поведение устройства для поддержания стабильного вывода и повышения скорости отклика. Наиболее распространенными пропорциональными регуляторами являются электронные регуляторы давления (EPR), состоящие из наполняющих и выпускных клапанов, встроенного датчика и ПИД-регуляторов для регулировки характеристик отклика.EPR требует только внешней команды уставки, чтобы стать схемой управления с обратной связью. Уставка постоянно сравнивается с показаниями бортового преобразователя для получения «ошибки». Особая цель промышленных контуров ПИД-регулирования состоит в том, чтобы постоянно уменьшать и поддерживать значение ошибки на уровне нуля или близком к нему. Итак, как каждый алгоритм способствует достижению этой цели?
Вклад пропорционального алгоритма
Как первый компонент в нашем контуре управления, пропорциональный алгоритм обычно является наиболее действенным и наиболее важным из трех.Компонент P отвечает за регулировку переменной управления пропорционально величине вычисленной ошибки в процессе. Расчет для выхода P прост: «текущая ошибка» x Kp (константа пропорционального усиления). Регулировка значения P-усиления увеличивает или уменьшает скорость отклика. В некоторых процессах используется схема управления только для P. Однако, если пропорциональный алгоритм является единственным элементом, задействованным в системе, может произойти стабильная работа, но установившаяся ошибка сохраняется, и колебания могут стать неотъемлемой частью процесса.
Расчет для выхода P прост: «текущая ошибка» x Kp (константа пропорционального усиления). Регулировка значения P-усиления увеличивает или уменьшает скорость отклика. В некоторых процессах используется схема управления только для P. Однако, если пропорциональный алгоритм является единственным элементом, задействованным в системе, может произойти стабильная работа, но установившаяся ошибка сохраняется, и колебания могут стать неотъемлемой частью процесса.
Рассмотрим аналогию с квадрокоптером-дроном. Эти летательные аппараты используют сложные алгоритмы PID, которые используют данные бортовых датчиков для расчета скорости вращения двигателей, чтобы поддерживать желаемое положение самолета. В этом примере алгоритм P представляет собой настройку отзывчивости и чувствительности, и он определяет, насколько активно контроллер работает для исправления ошибки. В общем, низкая настройка P кажется мягкой и неряшливой на элементах управления, а высокая настройка P кажется резкой и резкой. Однако, если установка P слишком высока, она корректирует и превышает заданное значение, создавая высокочастотные колебания. Эти колебания можно сбросить и смещать вручную, но для автоматического устранения установившейся ошибки, присущей колебаниям, интеграл должен вносить свою функцию в схему управления.
Эти колебания можно сбросить и смещать вручную, но для автоматического устранения установившейся ошибки, присущей колебаниям, интеграл должен вносить свою функцию в схему управления.
Вклад интегрального алгоритма
Интеграл – это совокупность всех записанных значений с момента начала отсчета времени до его остановки. Компонент I регистрирует все ошибки выше или ниже нуля (по сравнению с заданным значением) и постоянно стремится уменьшить его до нуля или около нуля.Поскольку интеграл со временем компилирует ошибки, он устраняет любую установившуюся ошибку в системе. В то время как P мгновенно реагирует на уравновешивание ошибки в определенный момент времени, I компенсирует все ошибки за все известное время. Вычисление интеграла – это «накопленная ошибка» x K i (постоянная интегрального усиления).
Что касается квадрокоптера, интегральная настройка наиболее соответствует ощущению жесткости. Он отвечает за поддержание высоты дрона против внешних сил, таких как ветер или дополнительный вес. Если дует устойчивый ветер, компонент I обеспечивает все более стабильную высоту, поскольку накопление исторических ошибок усредняется и реализуется. Однако, если возникает неожиданный порыв ветра, отклика I может быть недостаточно для компенсации, и активируется производный алгоритм.
Если дует устойчивый ветер, компонент I обеспечивает все более стабильную высоту, поскольку накопление исторических ошибок усредняется и реализуется. Однако, если возникает неожиданный порыв ветра, отклика I может быть недостаточно для компенсации, и активируется производный алгоритм.
График интеграла
Интеграл – это совокупность всех записанных значений с момента начала отсчета времени до его остановки.
Вклад производного алгоритма
Если пропорциональная величина – это коррекция текущей ошибки, а интеграл – это коррекция прошлой ошибки, то производная представляет собой коррекцию будущей ошибки.Компонент D является наиболее сложным и обычно не требуется в большинстве приложений. Фактически, большинство пропорциональных контроллеров используют только контур управления PI. Однако действие D полезно в приложениях управления движением, поскольку оно связано с мгновенной скоростью изменения (производной) записанной ошибки. Если нет изменений в ошибке, выходная производная равна нулю.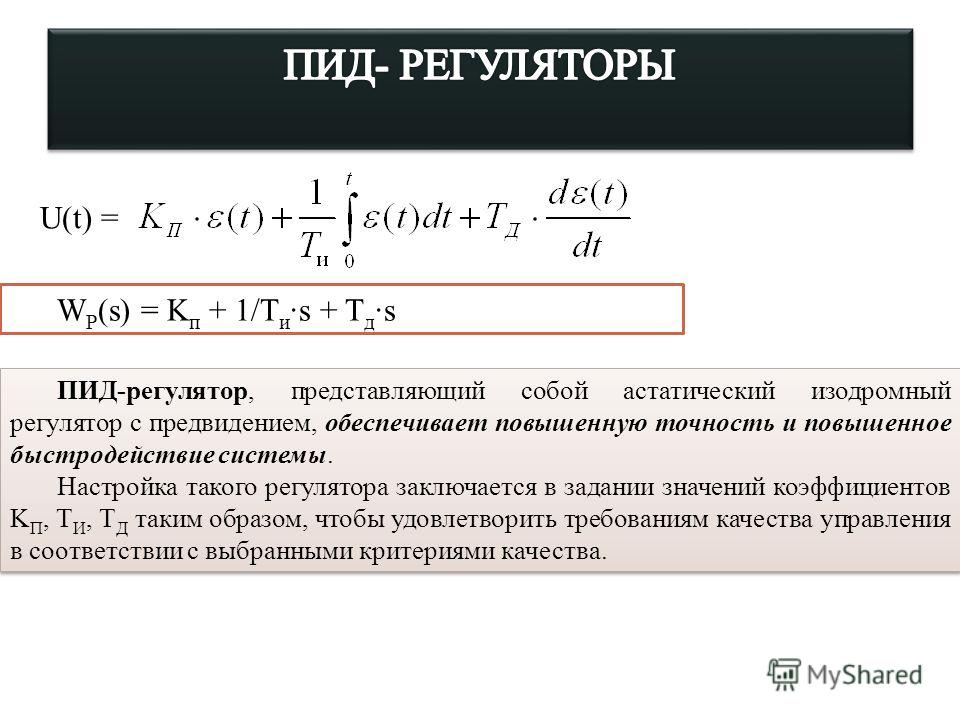 Если скорость изменения увеличивается или уменьшается, выводится производная, соответствующая величине мгновенного изменения ошибки.Вклад D наиболее эффективен, когда вклады P и I малы. В этом состоянии, если количество ошибок возрастает, компонентам P и I может потребоваться слишком много времени, чтобы отреагировать. Тем не менее, пик – это то, что ищет компонент D, и поэтому он немедленно реагирует и компенсирует. Расчет производной – это «производная ошибки» x Kd (константа усиления производной).
Если скорость изменения увеличивается или уменьшается, выводится производная, соответствующая величине мгновенного изменения ошибки.Вклад D наиболее эффективен, когда вклады P и I малы. В этом состоянии, если количество ошибок возрастает, компонентам P и I может потребоваться слишком много времени, чтобы отреагировать. Тем не менее, пик – это то, что ищет компонент D, и поэтому он немедленно реагирует и компенсирует. Расчет производной – это «производная ошибки» x Kd (константа усиления производной).
Если на дрон обрушивается значительный порыв ветра, активируется производное действие, чтобы компенсировать внезапное изменение скорости по ошибке.Выход D пытается ослабить чрезмерную коррекцию от P-компоненты путем смягчения и нейтрализации чрезмерного действия P-выхода. Большинство промышленных процессов с обратной связью не всегда сталкиваются с ситуациями, требующими действий D. таким образом, чаще всего используется ПИ-регулятор.
Простое устранение неполадок PI
Приведенная выше аналогия с дроном уместна, потому что она ссылается на чувства и ощущения, понятные каждому. Однако инженер по системам управления не «чувствует» повышение температуры и не «чувствует» падение давления; они используют необработанные данные и инструменты построения графиков для сопоставления показаний датчиков и сравнения с заданными значениями.
Однако инженер по системам управления не «чувствует» повышение температуры и не «чувствует» падение давления; они используют необработанные данные и инструменты построения графиков для сопоставления показаний датчиков и сравнения с заданными значениями.
При настройке контуров управления PI требуется много проб и ошибок для набора настроек. По этой причине настройка контуров PI – это не только наука, но и искусство. На графиках ниже показано типичное поведение PI, наблюдаемое с пропорциональными контроллерами, и рекомендуемые действия по их настройке.
Знайте приоритеты своего процесса
При обсуждении приложений пропорционального регулятора и того, как работают регуляторы давления, следует помнить о четырех поведенческих различиях при настройке контуров PI для обеспечения оптимальной производительности.В зависимости от процесса электронным пневматическим контроллерам может потребоваться повышенная скорость, более высокая точность, лучшее разрешение или более высокая стабильность. Возникает вопрос: что является приоритетным для того или иного процесса?
Возникает вопрос: что является приоритетным для того или иного процесса?
Например, традиционный контроль температуры насыщенного пара требует хорошей точности при стабильных температурах. Однако этого нельзя добиться быстро по нескольким причинам. Типичная установка включает термопару, измеряющую температуру на выходе, и ПИ-регулятор, вычисляющий уставку для технологического клапана (пропорциональный контроллер) на основе показаний температуры от термопары.Поскольку пропорциональный контроллер просто открывает и закрывает клапан, чтобы позволить большему или меньшему количеству пара на выходе, температура непрерывно колеблется вверх и вниз вокруг желаемой уставки. В конце концов, температура на выходе становится равной уставке, но для этого требуется от 45 минут до часа. Жертвовать скоростью для достижения стабильной и точной температуры остается приоритетом для многих приложений с температурой пара.
Как знание приоритетов процесса дает инженерам-разработчикам возможность определять оптимальное оборудование?
Скорость – это параметр, который больше всего влияет на другие параметры. Чем быстрее должен быть процесс, тем сложнее поддерживать точность, разрешение и стабильность. Понимая несущественность (с точки зрения физики и технологий) скорости в регулировании температуры пара, можно выбрать меньший (Cv) технологический клапан, оставляя больший бюджет для более качественной термопары.
Чем быстрее должен быть процесс, тем сложнее поддерживать точность, разрешение и стабильность. Понимая несущественность (с точки зрения физики и технологий) скорости в регулировании температуры пара, можно выбрать меньший (Cv) технологический клапан, оставляя больший бюджет для более качественной термопары.
Что, если бы скорость не была постоянной и корректировки происходили бы предсказуемо?
Например, микрофлюидика – это процесс, предназначенный для транспортировки отдельных клеток через микроскопические каналы для разнообразного спектра задач анализа – обеспечение стабильной скорости является обязательным условием.Однако часто предпочтительна низкая регулируемая скорость. Электронные регуляторы давления (EPR) часто используются для управления давлением различных жидкостей, каждая из которых имеет разную вязкость, плотность и другие непохожие характеристики. Если переменные процесса, такие как жидкость, давление и объем, изменяются, настройки PI требуют перенастройки для достижения оптимальной производительности.
Многие регуляторы давления работают хорошо при правильной настройке, но легко ли изменить настройки PI при изменении параметров? Доступны как цифровые, так и аналоговые пропорциональные контроллеры, следует ли отдавать предпочтение одной технологии перед другой?
Короткий ответ – да! Инженеры по системам управления предпочитают одну из этих технологий, и вскоре инженеры-конструкторы тоже.
Сравнение цифрового и аналогового ПИД-регулирования
Аналоговый пропорциональный контроллер
Преимущества и ограничения
Аналоговые пропорциональные контроллеры обладают двумя потенциальными преимуществами перед цифровыми (микроконтроллерными) устройствами. Во-первых, аналоговые схемы имеют более высокую скорость, чем цифровые. Однако это не имеет отношения к пропорциональным контроллерам, потому что независимо от того, насколько быстро электрический сигнал открывает или закрывает клапан, жидкость, проходящая через клапан, всегда медленнее реагирует, сводя на нет ощутимое преимущество. Во-вторых, на рынке преобладает аналоговая технология, и для ее внедрения и эксплуатации требуется меньше времени. Хотя это потенциально текущее преимущество, очевидно, что тенденция к цифровым технологиям. Оба упомянутых преимущества лишь подчеркивают отсутствие единственного аналогового преимущества, имеющего отношение к данной статье: ПИД-регулирования.
Во-вторых, на рынке преобладает аналоговая технология, и для ее внедрения и эксплуатации требуется меньше времени. Хотя это потенциально текущее преимущество, очевидно, что тенденция к цифровым технологиям. Оба упомянутых преимущества лишь подчеркивают отсутствие единственного аналогового преимущества, имеющего отношение к данной статье: ПИД-регулирования.
Преимущества цифрового ПИД-регулирования
Понимание предпочтения цифровых и аналоговых устройств сводится к пониманию конкретной технологии управления, которую использует устройство.Схема аналоговая или микроконтроллер на плате управляет работой устройства? В то время как преобладание аналоговых устройств на рынке может сделать выбор аналогового оборудования решением по умолчанию, цифровые пропорциональные микроконтроллеры предлагают многочисленные улучшения по сравнению со своими аналоговыми аналогами, особенно в контексте расширенной функциональности ПИД.
Общая схематическая структура ПИД-контура
Простота настройки ПИД-регулятора
Настройка параметров ПИД-регулятора некоторых аналоговых электронных регуляторов давления – утомительный и трудоемкий процесс, требующий от оператора вращения крошечных потенциометров вручную. Однако изменение параметров цифрового ПИД-регулятора выполняется с помощью простого программного интерфейса, позволяющего оператору напрямую управлять настройками с клавиатуры, пока устройство не достигнет желаемых рабочих характеристик. Этого единственного различия достаточно, чтобы заинтересовать любого инженера по контролю и сократить количество рабочих часов.
Однако изменение параметров цифрового ПИД-регулятора выполняется с помощью простого программного интерфейса, позволяющего оператору напрямую управлять настройками с клавиатуры, пока устройство не достигнет желаемых рабочих характеристик. Этого единственного различия достаточно, чтобы заинтересовать любого инженера по контролю и сократить количество рабочих часов.
Безопасность, отслеживаемость и подотчетность
Безопасность PID – это дополнительное преимущество устройств, управляемых микроконтроллером. Когда заводские настройки ПИД-регулятора приводят к нежелательным характеристикам процесса, операторы могут вмешиваться в потенциометры ПИД-регулятора аналогового контроллера, создавая дополнительные проблемы.После изменения настроек ПИД-регулятора сложно вернуть устройство к первоначальной калибровке. Однако изменения PID микроконтроллера требуют программного интерфейса, который сохраняет все изменения в настройках PID, обеспечивая учет и упрощая возврат к заводским настройкам, если новые значения работают плохо.
Реакция динамического процесса
В мире электронных регуляторов давления (EPR) некоторые приложения являются статическими и требуют только простого контроля давления в замкнутом объеме.Однако многие приложения являются динамическими с различными уставками, входным давлением, объемом, противодавлением и утечками. Обнаружение значений ПИД-регулятора, которые обеспечивают хорошее поведение аналогового управления давлением в динамических условиях, сложно, если вообще возможно. Пропорциональный микроконтроллер может изменять значения PID в любое время с помощью метода, называемого планированием усиления, когда микроконтроллер выбирает новые значения на основе изменений (триггеров) в реальном времени в рабочих условиях. Таким образом, цифровой микроконтроллер обеспечивает лучшую стабильность и воспроизводимость в более широком диапазоне рабочих условий, чем аналоговый контроллер.
Изложенная выше базовая теория контура ПИД-регулирования не предназначена для предоставления инженерам-проектировщикам достаточных знаний для настройки контуров ПИД-регулирования. Тем не менее, он предназначен для того, чтобы дать представление об искусстве и процессе настройки ПИД-регулятора в том, что касается пропорциональных контроллеров. Отмеченные различия между настройкой ПИД-регулятора аналогового или цифрового пропорционального регулятора широки и открывают глаза. Цифровой микроконтроллер экономит огромное количество времени инженерам по контролю и обеспечивает большую адаптируемость и гибкость при разработке в будущем без необходимости закупки дополнительных продуктов.
Если у вас есть вопросы о цифровом пропорциональном управлении или вам нужна информация о новых электронных пропорциональных регуляторах давления Cordis от Clippard, свяжитесь с Clippard сегодня.
Связанное содержимое
Современная промышленная рабочая лошадка: ПИД-регуляторы
Пропорционально-интегрально-производные (ПИД) регуляторы сегодня используются в большинстве приложений автоматического управления технологическими процессами в промышленности для регулирования расхода, температуры, давления, уровня и многих других переменных промышленных процессов.
Они датируются 1939 годом, когда инструментальные компании Taylor и Foxboro представили первые два ПИД-регулятора. Все современные контроллеры основаны на этих исходных пропорциональных, интегральных и производных режимах.
ПИД-регуляторы – это рабочая лошадка современных систем управления технологическими процессами, поскольку они автоматизируют задачи регулирования, которые в противном случае пришлось бы выполнять вручную. Хотя режим пропорционального управления является основной движущей силой в контроллере, каждый режим выполняет уникальную функцию.Пропорциональный и интегральный режимы управления важны для большинства контуров управления, в то время как производный режим отлично подходит для управления движением. Контроль температуры – типичное приложение, в котором используются все три режима управления.
Ручное управление
Рис. 1. Оператор, выполняющий ручное управление Без ПИД-регулятора ручное управление температурой воды является утомительным процессом. Например, чтобы поддерживать постоянную температуру воды, выпускаемой из промышленного газового обогревателя, оператор должен следить за датчиком температуры и соответствующим образом регулировать клапан топливного газа (Рисунок 1).Если температура воды становится слишком высокой, оператор должен закрыть газовый клапан ровно настолько, чтобы вернуть температуру к желаемому значению. Если вода становится слишком холодной, он должен открыть газовый кран.
Например, чтобы поддерживать постоянную температуру воды, выпускаемой из промышленного газового обогревателя, оператор должен следить за датчиком температуры и соответствующим образом регулировать клапан топливного газа (Рисунок 1).Если температура воды становится слишком высокой, оператор должен закрыть газовый клапан ровно настолько, чтобы вернуть температуру к желаемому значению. Если вода становится слишком холодной, он должен открыть газовый кран.
Задача управления, выполняемая оператором, называется управлением с обратной связью, потому что оператор изменяет скорость стрельбы на основе обратной связи от процесса через датчик температуры. Оператор, клапан, технологический процесс и датчик температуры образуют контур управления. Любое изменение, которое оператор вносит в газовый клапан, влияет на температуру, которая возвращается оператору, тем самым замыкая контур.
Автоматическое управление
Для автоматизации регулирования температуры с помощью ПИД-регулятора необходимо следующее:
- Установить электронное устройство измерения температуры
- Автоматизировать клапан, добавив привод (и, возможно, позиционер), чтобы он мог управляться электроникой
- Установите контроллер и подключите его к устройству измерения температуры и автоматическому регулирующему клапану.
СВЯЗАННЫЕ СТАТЬИ В ПИД-КОНТРОЛЛЕРАХ. систем управления с обратной связью
Оператор устанавливает заданное значение (SP) ПИД-регулятора на желаемую температуру, а выход контроллера (CO) устанавливает положение регулирующего клапана.Измерение температуры, называемое технологической переменной (PV), затем передается на ПИД-регулятор, который сравнивает его с уставкой и вычисляет разницу или ошибку (E) между двумя сигналами. Основываясь на ошибке и константах настройки контроллера, контроллер вычисляет соответствующий выходной сигнал контроллера, чтобы установить регулирующий клапан в правильное положение, чтобы поддерживать температуру на заданном уровне (рисунок 2). Если температура поднимется выше заданного значения, контроллер снизит положение клапана и наоборот.
Каждый из трех режимов контроллера по-разному реагирует на ошибку. Степень отклика, производимого каждым режимом управления, регулируется путем изменения настроек контроллера.
Режим пропорционального управления
Режим пропорционального управления изменяет выходной сигнал контроллера пропорционально ошибке. Если ошибка увеличивается, регулирующее воздействие увеличивается пропорционально.
Регулируемая настройка для пропорционального управления называется усилением контроллера (Kc).Более высокое усиление регулятора увеличивает степень пропорционального управляющего воздействия для данной ошибки. Если коэффициент усиления регулятора установлен слишком высоким, контур управления начнет колебаться и станет нестабильным. Если установлено слишком низкое значение, контур управления не будет адекватно реагировать на возмущения или изменения уставки.
Для большинства контроллеров регулировка усиления контроллера влияет на величину отклика в интегральном и производном режимах управления.
Пропорциональный контроллер
ПИД-регулятор можно настроить на выполнение только пропорционального действия, отключив интегральный и производный режимы.Пропорциональные контроллеры просты для понимания и настройки: выходной сигнал контроллера представляет собой просто ошибку управления, умноженную на коэффициент усиления контроллера, плюс смещение. Смещение необходимо, чтобы контроллер мог поддерживать ненулевой выходной сигнал, пока ошибка равна нулю (переменная процесса в заданном значении). Недостатком является смещение, которое является устойчивой ошибкой, которую нельзя устранить одним только пропорциональным управлением. При только пропорциональном управлении смещение будет присутствовать до тех пор, пока оператор вручную не изменит смещение на выходе контроллера, чтобы удалить смещение.Это называется ручным сбросом контроллера.
Режим интегрального управления
Рисунок 3. (слева) Алгоритм неинтерактивного ПИД-регулятора; (справа) параллельный алгоритм ПИД-регулятораНеобходимость ручного сброса привела к развитию автоматического сброса, известного как режим интегрального управления. Функция режима интегрального управления заключается в увеличении или уменьшении выходного сигнала контроллера с течением времени для уменьшения ошибки, пока присутствует какая-либо ошибка (переменная процесса не соответствует заданному значению).По прошествии достаточного времени интегральное действие будет управлять выходом контроллера до тех пор, пока ошибка не станет нулевой.
Если ошибка большая, интегральный режим будет увеличивать / уменьшать выходной сигнал контроллера с высокой скоростью; если ошибка небольшая, изменения будут медленными. Для данной ошибки скорость интегрального действия задается настройкой интегрального времени контроллера (Ti). Если время интегрирования установлено слишком большим, контроллер будет работать медленно; если он установлен слишком коротким, контур управления будет колебаться и станет нестабильным.
В большинстве контроллеров в качестве единицы измерения интегрального управления используется время интегрирования в минутах. Некоторые используют время интегрирования в секундах, а некоторые контроллеры используют интегральное усиление (Ki) в повторениях в минуту.
Пропорциональный + интегральный контроллер
Обычно называемый ПИ-регулятором, выход пропорционального + интегрального регулятора состоит из суммы пропорциональных и интегральных управляющих воздействий.
После сбоя в интегральном режиме увеличивается выход контроллера до тех пор, пока он не устранит все смещения и не вернет температуру на выходе нагревателя к заданному значению.
Режим производного управления
Производное управление редко используется в процессах управления, хотя часто используется в управлении движением. Он очень чувствителен к шуму измерения, затрудняет настройку методом проб и ошибок и не является абсолютно необходимым для управления технологическим процессом. Однако использование производного режима контроллера может заставить определенные типы контуров управления – например, регулирование температуры – реагировать быстрее, чем при использовании только ПИ-регулирования.
В режиме управления производной вырабатывается выходной сигнал, основанный на скорости изменения ошибки.Если ошибка изменяется быстрее, она производит больше управляющих воздействий; если нет изменений в ошибке, действие производной равно нулю. В этом режиме есть регулируемая настройка, которая называется Derivative Time (Td). Чем больше значение производной времени, тем больше производное действие. Однако, если время производной установлено слишком большим, будут возникать колебания, и контур управления будет нестабильным. Установка Td на ноль эффективно отключает режим производной. Для производной настройки контроллера используются две единицы измерения: минуты и секунды.
Пропорциональный + интегральный + производный контроллер
Рис. 4. Реакция ПИД-, ПИД- и ПИД-регуляторов на возмущениеВыход ПИД-регулятора состоит из суммы пропорциональных, интегральных и производных управляющих воздействий. Алгоритмы ПИД-регулирования бывают разных конструкций, включая неинтерактивный алгоритм и параллельный алгоритм. Оба показаны на рисунке 3.
В ПИД-регуляторе производный режим обеспечивает большее управляющее воздействие раньше, чем это возможно при П или ПИ-регулировании.Это снижает влияние помех и сокращает время, необходимое для возврата уровня к заданному значению.
На рис. 4 сравнивается время восстановления температуры на выходе технологического нагревателя после резкого изменения давления топливного газа при P, PI и PID-регулировании.
Настройка контроллера
ПИД-регуляторы требуют настройки, но когда они впервые появились на рынке, не было четких инструкций, как это сделать. Настройка производилась методом проб и ошибок до 1942 года, когда два метода настройки были опубликованы Дж.Г. Зиглер и Н. Б. Николс из компании Taylor Instruments.
Эти правила настройки хорошо работают с процессами с очень большими постоянными времени относительно их мертвого времени и с контурами управления уровнем, которые содержат процесс интеграции. Они плохо работают с контурами управления, которые содержат саморегулирующиеся процессы, такие как расход, температура, давление, скорость и состав.
Саморегулирующийся процесс всегда стабилизируется в некоторой точке равновесия, которая зависит от конструкции процесса и выходных данных контроллера; если на выходе контроллера установлено другое значение, процесс отреагирует и стабилизируется в новой точке равновесия.
Большинство контуров управления содержат саморегулирующиеся процессы, и для них были разработаны методы настройки. Например, правила настройки Коэна-Куна хорошо работают практически на всех контурах управления с саморегулирующимися процессами. Эти правила изначально были разработаны для очень быстрого отклика, но это привело к появлению петель с высоким колебательным откликом. При небольшом изменении правил контуры управления по-прежнему быстро реагируют, но гораздо менее подвержены колебаниям. Сегодня существует более 100 методов настройки контроллеров, каждый из которых предназначен для достижения определенной цели.
Заключение
Современные системы управления технологическим процессом не могут существовать без ПИД-регуляторов, так как все функции управления должны выполняться вручную. Каждый из режимов пропорционального, интегрального и производного управления выполняет уникальную функцию, и правила настройки были разработаны для обеспечения эффективного управления процессом для всех типов контуров и приложений.
Эту статью написал Ли Пейн, генеральный директор Dataforth Corporation, Тусон, Аризона. Для получения дополнительной информации щелкните здесь .
Ресурсы
Для получения информации о промышленной системе сбора данных и управления Dataforth MAQ ® 20 загрузите Каталог.
Ссылки
- an122: Введение в ПИД-регулирование
- an123: Настройка контуров управления для быстрого реагирования
- an124: Настройка контуров управления с помощью метода настройки IMC 3
- : 3 Петли
- an126: Настройка контуров контроля уровня в расширительных баках
NASA Tech Briefs Magazine
Эта статья впервые появилась в июльском выпуске журнала NASA Tech Briefs за июль 2014 г.
Читать статьи в этом выпуске Вот.
Другие статьи из архивов читайте здесь.
ПОДПИСАТЬСЯ
Работа ПИД-регулятора / регулятора температуры
Что такое ПИД-регулирование?
Как следует из названия, эта статья даст точное представление о структуре и работе ПИД-регулятора. Однако, чтобы вдаваться в подробности, давайте рассмотрим введение в ПИД-регуляторы.
ПИД-регуляторы используются в широком спектре приложений для управления промышленными процессами.Около 95% операций с обратной связью системы промышленной автоматизации используют ПИД-регуляторы. PID означает пропорционально-интегрально-производная. Эти три контроллера объединены для создания управляющего сигнала.
Как контроллер возврата, он обеспечивает управляющий выход на желаемых уровнях. До изобретения микропроцессоров ПИД-регулирование осуществлялось с помощью аналоговых электронных компонентов. Но сегодня все ПИД-регуляторы обрабатываются микропроцессорами. Программируемые контроллеры также имеют встроенные инструкции от контроллеров ПИД.Из-за гибкости и надежности ПИД-регуляторов они традиционно используются в приложениях управления технологическими процессами.
Работа ПИД-регулятора
При использовании простого и недорогого контроллера ВКЛ-ВЫКЛ возможны два состояния управления, например, полностью или полностью выключено. Он используется для приложения с ограниченным управлением, когда этих двух состояний управления достаточно для достижения цели управления. Однако колебательный характер этой команды ограничивает ее использование и поэтому заменяется ПИД-регуляторами.
ПИД-регулятор поддерживает выходной сигнал таким образом, чтобы не было ошибки между переменной процесса и желаемой уставкой / выходом во время операций с обратной связью. ПИД-регулятор использует три основных режима управления, которые описаны ниже.
Регулятор – P:
Пропорциональный или П-регулятор выдает выходной сигнал, пропорциональный текущей ошибке e (t). Он сравнивает желаемую точку или уставку с фактическим значением или значением процесса обратной связи.Результирующая ошибка умножается на пропорциональную константу для получения выходного сигнала. Если значение ошибки равно нулю, выход контроллера равен нулю.
Этот контроллер требует ручного смещения или сброса при использовании отдельно. Это потому, что он никогда не достигает состояния устойчивого состояния. Он обеспечивает стабильную работу, но всегда поддерживает стабильное состояние ошибки. Скорость отклика увеличивается с увеличением пропорциональной постоянной Kc.
Регулятор– PI:
Из-за ограничений p-контроллера, когда все еще есть смещение между переменной процесса и уставкой, требуется I-контроллер, который обеспечивает действие, необходимое для устранения ошибки установившегося состояния.Он интегрирует ошибку за период времени, пока значение ошибки не достигнет нуля. Он содержит значение конечного устройства контроля, при котором ошибка становится равной нулю.
Полный контроль снижает выходную мощность в случае отрицательной ошибки. Это ограничивает скорость ответа и влияет на стабильность системы. Скорость отклика увеличивается за счет уменьшения интегрального усиления Ki.
На рисунке выше, когда коэффициент усиления контроллера I уменьшается, ошибка установившегося состояния также уменьшается.В большинстве случаев используется ПИ-регулятор, особенно когда не требуется высокая скорость реакции.
При использовании ПИ-регулятора выход I-регулятора ограничивается определенным расстоянием, чтобы преодолеть условия интеграла обмотки, интегральный выход увеличивается даже в состоянии нулевой ошибки из-за нелинейности установки .
Регулятор – PID:
I-контроллер не имеет возможности прогнозировать поведение ошибок в будущем. Таким образом, он нормально реагирует на изменение уставки.D-контроллер преодолевает эту проблему, предвидя будущее поведение ошибки. Его выход зависит от скорости изменения ошибки по времени, умноженной на производную константу. Он стартует к выходу, тем самым увеличивая реакцию системы.
На приведенном выше рисунке реакция контроллера D больше, чем реакция контроллера PI, и время установления выхода также уменьшено. Это улучшает стабильность системы за счет компенсации фазового сдвига, вызванного контроллером I.Увеличение производного усиления увеличивает скорость отклика.
Итак, мы наконец обнаружили, что, объединив эти три контроллера, мы можем получить желаемый отклик для системы. Разные производители разрабатывают разные алгоритмы ПИД-регулирования.
Методы настройки ПИД-регулятора
Прежде чем ПИД-регулятор заработает, он должен быть адаптирован к динамике контролируемого процесса. Разработчики приводят значения по умолчанию для терминов P, I и D. Эти значения не могли обеспечить желаемую производительность и иногда приводили к нестабильности и снижению производительности управления.Для настройки ПИД-регуляторов разработаны различные типы методов регулировки, которые требуют особого внимания со стороны оператора для выбора наилучших значений пропорционального, интегрального и производного усиления. Некоторые из них приведены ниже.
Метод проверки и ошибок: это простой метод настройки ПИД-регулятора. Когда система или контроллер работают, мы можем настроить контроллер. В этом методе мы должны сначала установить значения Ki и Kd равными нулю и увеличивать пропорциональный член (Kp) до тех пор, пока система не достигнет колебательного поведения.Когда он начнет колебаться, отрегулируйте Ki (интегральный член), чтобы остановить колебания, затем отрегулируйте D, чтобы получить быстрый отклик.
Метод кривой реакции процесса: Это метод регулировки разомкнутого контура. Он дает ответ, когда к системе применяется пошаговый ввод. Первоначально нам нужно вручную применить к системе определенные управляющие выходы и записать кривую отклика.
После этого мы должны рассчитать наклон, мертвое время, время нарастания кривой и, наконец, подставить эти значения в уравнения P, I и D, чтобы получить значения усиления в терминах PID.
Метод Цейглера-Николса: Цейглер-Николс предложил методы с обратной связью для настройки ПИД-регулятора. Это метод непрерывного цикла и метод затухающих колебаний. Процедуры для этих двух методов идентичны, но поведение при колебаниях различается. Для этого мы должны сначала определить константу контроллера p, Kp, на конкретном значении, в то время как значения Ki и Kd равны нулю. Пропорциональное усиление увеличивается до тех пор, пока система не начнет колебаться с постоянной амплитудой.
Коэффициент усиления, при котором система производит постоянные колебания, называется конечным коэффициентом усиления (Ku), а период колебаний называется конечным периодом (Pc). Достигнув этого, мы можем ввести значения P, I и D в ПИД-регулятор благодаря таблице Цейглера-Николса, которая зависит от используемого регулятора, например, P, PI или PID, как показано ниже.
Структура ПИД-регулятора
ПИД-регулятор включает три элемента: пропорциональное управление, интегральное управление и производное управление.Комбинированная работа этих трех контроллеров обеспечивает стратегию управления процессом. ПИД-регулятор управляет переменными процесса, такими как давление, скорость, температура, расход и т. Д. Некоторые приложения используют ПИД-регуляторы в каскадных сетях, где для выполнения управления используются два или более ПИД-регуляторов.
На рисунке выше показана структура ПИД-регулятора. Он состоит из блока PID, который передает свой вывод блоку процесса. Процесс / установка состоит из оконечных устройств управления, таких как приводы, регулирующие клапаны и другие устройства управления для управления различными промышленными процессами / установками.
Обратный сигнал от очистного сооружения сравнивается с заданным значением или с опорным сигналом u (t), и соответствующий сигнал ошибки e (t) передается в алгоритм ПИД. Основываясь на расчетах пропорционального, интегрального и производного алгоритмов, контроллер вырабатывает комбинированный ответ или управляемый выходной сигнал, который подается на устройства управления объекта.
Не всем приложениям управления нужны все три элемента управления. Комбинации, такие как команды PI и PD, очень часто используются в практических приложениях.
Мы надеемся, что смогли предоставить базовые, но точные знания о ПИД-регуляторах. Вот простой вопрос для всех вас. Какой из различных методов регулировки предпочтительно использовать для достижения оптимальной работы ПИД-регулятора и почему?
Буква «D» в PID означает: Не использовать (иногда)!
Производный член – это не только последняя буква в ПИД-регуляторе (т.е. пропорционально-интегральная-производная), но и наиболее злокачественная из трех. Пропорциональный член с его большим толчком обеспечивает немедленную коррекцию изменений в управлении, и он явно является звездой ПИД-регулятора.Точно так же интегральному члену приписывают упорную коррекцию смещения и стабильное возвращение петли к заданному значению. А еще есть дверь №3: скромный производный термин. Производная работает, чтобы противодействовать скорости изменения переменной процесса.
Практикующие специалисты в целом правильно оценивают производные инструменты и по уважительной причине избегают их использования в промышленных приложениях. В частности, Derivative чаще может быть помехой, чем помочь. Это может быть связано не столько с тем, как он функционирует, сколько с приложениями, в которых оно применяется.Мы больше не живем в эпоху пневматических контроллеров, а цифровая эпоха ставит некоторые уникальные проблемы для приложений Derivative. Рассмотрим следующее:
- Производная была введена как реакция на скорость изменения ошибки. В своем стремлении устранить смещение интегральный член выполняет замечательную работу, но часто приводит к колебаниям из-за перерегулирования и часто требует чрезмерного времени на установление. Действительно, производный член имеет наибольшее влияние, когда переменная процесса быстро изменяется в связи с колебательной природой интегрального отклика.
- Мы живем в эпоху цифровых технологий, и обрабатываемые данные подвержены значительному шуму. Одна особенность производного термина заключается в том, что он плохо реагирует при применении в шумных условиях. Случайная ошибка в сигнале процесса приводит к кажущимся постоянным резким изменениям направления переменной процесса (PV). При каждом развороте соответствующий расчет наклона приближается к бесконечности, что дает производный результат, который может быть чрезмерно изменчивым.
- Производная предназначена для реагирования на скорость изменения переменной процесса.В его наиболее распространенном применении, регулирование температуры, производная используется для борьбы с инерцией, которую создает регулятор температуры. Например, когда вы увеличиваете нагрев печи, температура естественным образом начинает расти. Если вы быстро перестанете добавлять тепло, температура будет продолжать повышаться в течение короткого времени, прежде чем стабилизироваться. Без производной пропорциональный и интегрирующий члены обычно применяют слишком большую коррекцию и не откатываются достаточно быстро, что вызывает перерегулирование.Член производной отходит немного быстрее, так как производная связана с ограничением скорости изменения, а не с достижением заданного значения.
Не поймите меня неправильно. Существует множество промышленных приложений, в которых использование Derivative не только хорошо, но и идеально. Обычно это процессы, которые ограничивают шум и имеют большую постоянную времени. Подумайте о процессах контроля температуры, которые включают в себя значительный контроль массы или pH. В этих приложениях Derivative может использоваться для противодействия инерции процесса, не внося ни нестабильности, ни вреда для связанного оборудования процесса.
Управление на основе модели в сравнении с ПИД-регулированием
Задача
Для демонстрации значительных преимуществ модельно-ориентированного управления (MBC) над стандартным ПИД-регулированием в отношении производительности и надежности.
Фон
Многие современные системы термической обработки включают контроль температуры нагреваемых пластин. Обычно эти пластины нагреваются инфракрасным излучением от горячих волокон (включая вольфрамовые галогенные лампы), а температура измеряется с помощью пирометров.Во многих случаях температура системы регулируется с помощью пропорционально-интегрально-производного (ПИД) регулятора. Однако есть приложения, в которых необходимо быстро повышать (или понижать) температуру, сохраняя при этом хорошую однородность температуры и жесткие пределы производительности. В этих случаях может быть трудно или даже невозможно достичь желаемой производительности с помощью ПИД-регуляторов. Кроме того, динамический отклик этих систем обычно значительно меняется в зависимости от рабочих условий, таких как температура, состав технологического газа, коэффициент излучения пластины или коэффициент излучения стенок (например,g., в системах, где стены покрываются в процессе осаждения). Эти изменяющиеся рабочие условия могут затруднить настройку ПИД-регулятора для достижения желаемой производительности в широком диапазоне рабочих условий.
Чтобы улучшить производительность в таких ситуациях, ПИД-регуляторы часто планируют усиление с использованием разных коэффициентов усиления ПИД для разных рабочих условий. Однако ограничения ПИД-регулирования по-прежнему применяются, и планирование усиления увеличивает количество усилий, необходимых для настройки коэффициентов усиления.В качестве альтернативы можно разработать даже более сложные контроллеры, такие как линейно-квадратичные гауссовские (LQG) контроллеры, но для этого требуется активное участие специалиста в области систем и управления, что непрактично на фабриках.
Решение
SC Solutions разработала и усовершенствовала подход к управлению на основе моделей, который может обеспечить хорошие характеристики в широком диапазоне рабочих условий. В этом подходе, например, для регулирования температуры математическая модель соответствующей физики системы непосредственно включается в контроллер обратной связи.Таким образом, контроллер включает в себя информацию о том, как динамика системы изменяется в зависимости от рабочей температуры.
После разработки модели предприятия с использованием информации о геометрии камеры, свойствах материала и т. Д. Конструкция контроллера становится относительно простой по сравнению с контроллером LQG. Конструкция контроллера сводится к нескольким простым вариантам выбора, например, к выбору полосы пропускания желаемой системы с обратной связью. Набор графиков на двух рисунках ниже показывает превосходные характеристики контроллера MBC по сравнению со стандартным ПИД-регулятором для нагреваемой пластины.
ПИД-регулирование и производная измерения – Control Guru
Как и ПИ-регулятор, пропорционально-интегрально-производный (ПИД) регулятор вычисляет выходной сигнал контроллера (СО) для конечного элемента управления каждый раз выборки T.
ПИД-регулятор представляет собой «трехрежимный» регулятор. То есть его активность и производительность основаны на значениях, выбранных для трех параметров настройки, каждый из которых номинально связан с пропорциональным, интегральным и производным членами.
Как мы обсуждали ранее, ПИ-регулятор представляет собой достаточно простое уравнение с двумя регулируемыми параметрами настройки. Количество различных способов, которыми коммерческие поставщики могут реализовать форму PI, довольно ограничено, и все они обеспечивают одинаковую производительность при правильной настройке.
С добавлением третьего регулируемого параметра настройки количество перестановок алгоритма заметно увеличивается. И есть даже разные формы самого уравнения ПИД. Это создает дополнительные проблемы при проектировании и настройке контроллера.
Здесь мы сосредоточимся на том, что такое производная, как она вычисляется и что она означает для управления. Мы также исследуем, почему производная от измерения широко рекомендуется в производственной практике.
В этой статье мы сужаем наш мир и сосредотачиваемся на зависимой, идеальной форме контроллера. В следующих статьях мы вернемся и поговорим о различных формах алгоритмов, методах проектирования и настройки, ограничениях алгоритмов и других практических вопросах.
Форма зависимого идеального ПИД-регулятора
Популярный способ, которым поставщики выражают зависимый идеальный ПИД-регулятор:
Где:
CO = выходной сигнал контроллера (выход провода)
CO смещение = смещение контроллера; задается безударной передачей
e (t) = ошибка регулятора тока, определяемая как SP – PV
SP = уставка
PV = измеряемая переменная процесса (входной провод)
Kc = усиление регулятора, параметр настройки
T i = время сброса, параметр настройки
T d = время производной, параметр настройки
Первые три члена справа от знака равенства идентичны ПИ-регулятору, который мы уже подробно исследовали.
Режим производной ПИД-регулятора – это дополнительный и отдельный член, добавляемый в конец уравнения, который учитывает производную (или скорость изменения) ошибки, поскольку она изменяется во времени.
Вклад производного члена
Пропорциональный член учитывает , как далеко PV от SP в любой момент времени. Его вклад в СО основан на размере e (t) только в момент времени t. По мере того, как e (t) увеличивается или уменьшается, влияние пропорционального члена немедленно и пропорционально увеличивается или уменьшается.
Интегральный член указывает , как долго и как далеко PV был от SP. Интегральный член непрерывно суммирует e (t). Таким образом, даже небольшая ошибка, если она сохраняется, будет иметь общую сумму, которая будет расти с течением времени, и влияние интегрального члена также будет расти.
Производная описывает крутизну кривой. Точнее, производная описывает наклон или скорость изменения кривой сигнала в определенный момент времени. Соответственно, член производной в приведенном выше уравнении PID учитывает , насколько быстро , или скорость, с которой изменяется ошибка (или PV, как мы обсудим далее) в текущий момент.
Производная на PV противоположна, но равна
Хотя пропорциональные и интегральные члены уравнения PID определяются ошибкой контроллера, e (t), вычисление производной во многих коммерческих реализациях должно основываться на самом значении PV.
Производная e (t) математически идентична отрицательной производной PV везде, кроме случаев изменения уставки. А при изменении уставки производная по ошибке приводит к нежелательному управляющему действию, которое называется выбросом производной .
| Математическое примечание: математическое обоснование того, что «производная e (t) равна отрицательной производной PV, когда SP постоянна», считает, что, поскольку e (t) = SP – PV, следующее уравнение следует. То есть производная ошибки равна производной уставки минус переменная процесса. Производная постоянной равна нулю, поэтому, когда SP является постоянным, математически производная (или крутизна, или скорость изменения) ошибки контроллера равна производной (или крутизна или скорость изменения) измеряемой переменной процесса, PV, за исключением противоположного знака. |
Рисунки ниже (щелкните, чтобы увеличить) наглядно демонстрируют, что производная e (t) является отрицательной величиной производной PV.
Верхний график показывает измеренную кривую PV после шага уставки. Нижний график показывает кривую e (t) = SP – PV для того же события.
Если мы сравним два графика после шага SP в момент времени t = 10, мы увидим, что кривая PV на верхнем графике является точным отражением кривой e (t) на нижнем графике.Кривая PV поднимается, достигает пика и затем стабилизируется, в то время как в отраженном образце кривая e (t) опускается, спадает и затем стабилизируется.
Математически это «зеркальное отображение» формы трассы означает, что производные (или наклоны, или скорости изменения) одинаковы везде после шага SP, за исключением того, что они противоположны по знаку.
Производная от PV, используемая на практике
Хотя форма e (t) и PV противоположна, но одинакова везде после шага уставки, существует важное различие в момент изменения SP.Нижний график показывает вертикальный всплеск e (t) в этот момент. На графике PV нет соответствующего всплеска.
Производная (или наклон) вертикального всплеска в теоретическом мире приближается к бесконечности. В реальном мире это как минимум очень большое число. Если T d достаточно велик, чтобы обеспечить какой-либо значимый вес производному члену, это огромное значение производной вызовет крупную и внезапную манипуляцию в CO. Эта большая манипуляция в CO, именуемая производным ударом , почти всегда нежелательна. .
Пока время выборки цикла T задано правильно, кривая PV будет следовать постепенному и непрерывному отклику, избегая резких вертикальных всплесков, очевидных на кривой e (t).
Поскольку производная по e (t) идентична производной по PV во все времена, кроме случаев, когда SP изменяется, и когда уставка действительно изменяется, производная по ошибке предоставляет информацию, которую мы не хотим, чтобы наш контроллер использовал, мы заменяем « математическое примечание »в желтом поле выше для получения ПИД-регулятора с производной на контроллере измерения:
Производная на PV не «пинает»
Ниже мы показываем пример использования теплообменника при ПИД-регулировании с использованием зависимой, идеальной формы алгоритма и умеренных значений настройки, вычисленных в этой статье.
Первые шаги уставки слева на графике ниже (щелкните, чтобы увеличить) показывают производительность контура при использовании ПИД-регулятора с производной при ошибке. Шаги уставок вправо представляют идентичный сценарий, за исключением того, что используется ПИД-регулятор с производной по измерению.
«Удар», который преобладает на трассе CO при использовании производной по ошибке, довольно драматичен и несколько тревожит. Хотя он существует только в течение короткого времени и не влияет на производительность в этом примере, мы не должны предполагать, что это всегда будет так.В любом случае такое действие в конечном итоге скажется на механических конечных элементах управления.
Основываясь на предыдущем обсуждении, мы рекомендуем использовать производную по измеренной PV, если наш поставщик предоставляет такую возможность (к счастью, большинство из них). Значения настройки остаются одинаковыми для обоих алгоритмов.
Общие сведения о производном действии
Быстро меняющаяся PV имеет крутой наклон, что приводит к большой производной. Это верно независимо от того, началось ли динамическое событие только что или продолжается уже некоторое время.
На графике ниже (щелкните для увеличения) производная dPV / dt описывает наклон или «крутизну» PV во время реакции процесса.
В начале отклика наклон большой и положительный, когда кривая PV быстро увеличивается. Когда PV уменьшается, производная (наклон) отрицательна. И когда PV проходит через пик или впадину, наступает момент времени, когда производная равна нулю.
Чтобы понять влияние этой изменяющейся производной, предположим для обсуждения, что:
| ▪ | Коэффициент усиления регулятора, Kc, положительный. |
| ▪ | Время производной, T d (всегда положительно) достаточно велико, чтобы придать значимый вес производному члену. В конце концов, если T d очень мало, член производной имеет небольшое влияние, независимо от наклона PV. |
Отрицательный знак перед членом производной ПИД с производной на контроллере измерения (и с учетом приведенных выше допущений) означает, что влияние на СО от члена производной будет противоположно знаку наклона:
Таким образом, когда dPV / dt велико и положительно, член производной имеет большое влияние и стремится уменьшить CO.
И наоборот, когда dPV / dt отрицательно, член производной стремится к увеличению CO.
Интересно отметить, что член производной не учитывает, движется ли PV к или от заданной точки (независимо от того, является ли e (t) положительным или отрицательным). Единственное, что нужно учитывать, это то, идет ли PV вверх или вниз и как быстро.
В результате производное действие направлено на подавление быстрых движений в ЛВ. Это может быть особенно полезной характеристикой при попытке ослабить колебания в PV, которые имеют тенденцию усиливаться интегральным действием.К сожалению, как мы обсудим, потенциальная выгода имеет свою цену.
.