
Подключение энкодера к микроконтроллеру
- Подробности
- Категория: Микроконтроллеры
- Опубликовано 23.06.2016 12:36
- Автор: Admin
- Просмотров: 1990
В этой статье пойдет речь о энкодере и о том как его подключить к микроконтроллеру. Встретить его можно в таких устройствах как аудиосистемы, стиральные машины, микроволновкой и ряде современных устройств. К примеру в аудиосистемах энкодеры и микроконтроллеры используются для регулировки громкости. Но ладно хватит уже воды, давайте ближе к делу.
Энкодер или как его еще называют датчик угла поворота – представляет собой электромеханическое устройство, которое преобразует положение угла вала в электрический сигнал. Энкодеры делятся на 2 типа абсолютные и инкрементные.
В инкрементных энкодерах при повороте вала формируются импульсы, количество этих импульсов пропорционально углу поворота вала. Если подсчитать эти импульсы то можно узнать угол поворота вала энкодера.
Абсолтные энкодеры имеют совершенно другой принцип дейставия, основаная на выдачи уникального кода каждому положению вала. Формирование импульсов происходит когда вал вращается и когда он в покое. Причем информация о текущем положения вала, сохранится даже после прекращения подачи напряжения.
В нашем примере мы подключим инкрементный энкодер с микроконтроллером. Энкодер PEC12 422OF SOO24 который имеет 24 импульса за 1 оборот.
Энкодер имеет 5 выводов, 3 из них это выводы самого энкодера, а другие два это кнопка. У выводов энкодера одни вывод общий а 2 другие сигнальные. Схема подключения ничем не отличается от схемы подключения обычной кнопки. Сигнальные выводы подключаются в портам ввода/вывода микроконтроллера. А общий вывод котоый посередине соединяется к земле. С целью защиты от дребезга контактов можно добавить конденсаторы емкостью несколько нФ.
Схема подключения энкодера к микроконтроллеру
Принцип действия энкодера основан на замыкании и размыкании контактов, когда ручку никто не крутит то на входе в МК имеется логическая еденица. Когда ручку начинают поворачивать то появляются два прямоугольных импульса которые сдвинуты друг относительно друга. От того в какую сторону крутим будет зависить какой сигнал опережает.
Но так как имеется друбезг контактов в любых картина будет выглядить следующим образом.
Алгоритм работы программы микроконтроллера
С определенным интервалом начинается вызов функции опроса энкодера. Эта функция считывает логические уровни, которые присутсвуют на выводах микроконтроллера и производит запись этого значения во временную переменную. Внутри функции опроса энкодера существует другая статичная переменная которая сохраняется при выходе из этой функции в ней хранится последовательность предыдуших значений.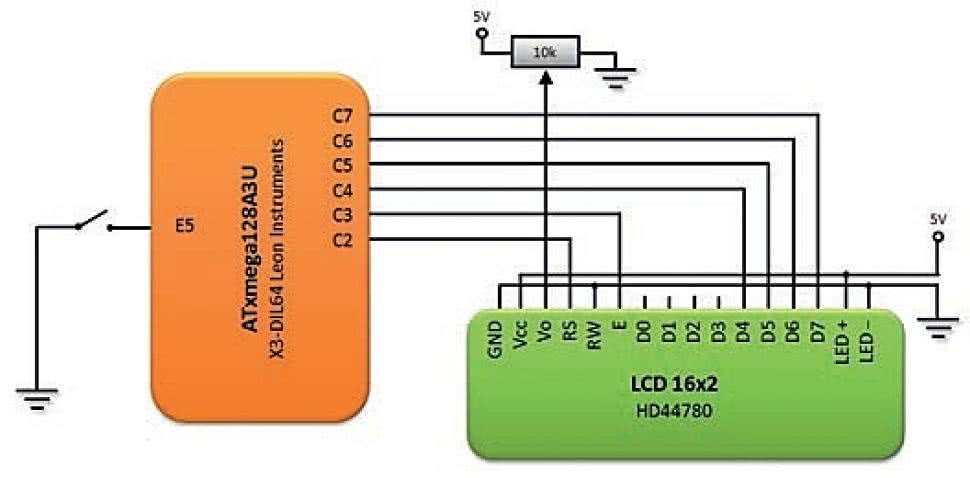
Получается что когда вал энкодера вращается то во временную переменную будет постоянно записываться новое значение и получится повторяющаяся кодовая последовательность. Если вращаем вправо булед : 11100001, а если влево то 11010010. По этим значениям можно понять в какую сторону крутится вал.
В архиве есть 2 файла encoder.h и encoder.c. Изначалоно нужно задать порт и номер выводов к которым производится подключение это переменные LEFT_SPIN и RIGHT_SPIN. В файле “c” находится реализация функций.
- void InitEncoder(void) – фукнция которая инициализирует выводы;
- void PollEncoder(void) – функция опроса энкодера, если есть вращение то пишем значение в функцию, если нет то просто выходим из функции так как нам нечего тут делать;
- unsigned char GetStateEncoder(void) – переменная возвращает содержимое буфера и очищает его.
Вызов функции опроса энкодера происходит с частототй в 4 кГц. Если опрашивать с меньшей частотой то МК может пропустить импульсы в случае быстрого вращения вала.
Исходник программы под микроконтроллер
- < Назад
- Вперёд >
Добавить комментарий
Схемы: Очень экономичный робот с использованием микроконтроллера 89c51 .: 6 шагов
Эй, ребята, это мой первый неразрешимый вопрос, так что, пожалуйста, будьте осторожны со мной ..
То, что я построил в этом неразрешимом, – это робот. Я называю его роботом-шпионом (потому что, если он построен маленьким, а камера добавлена, он будет действовать как шпион). Любыми способами, из-за нехватки времени и нехватки средств, я мог построить только базовую (огромную, а не микро-робота, которую я изначально планировал) модель робота. Я запрограммировал (язык ассемблера) робота для дополнительного управления двигателем для камеры и других переключателей.
Основное движение, которое должно произойти, – это движение вперед и назад, движение влево и вправо. Мы могли бы также добавить камеру, если требуется. Для некоторых людей это будет похоже на «неандертальского робота». Любыми способами я знаю боль, которая вошла в это. Это также мой коллажный проект, благодаря моим партнерам по проекту, Сандешу Давли, Сандживу Вишвакарме и Джугалу Макване.
Расходные материалы:
Шаг 1: Список компонентов
9 В батарея 1
Мост wo4 1
Конденсатор 1000 мкФ / 25 В 1
Конденсатор 10 мкФ / 25В 2
Регулятор 7805 1
Кодировщик ключей 1
Энкодер HT12E 1
РЧ передатчик 1
IC база 18pin 2
Микропереключатель 16
Ленточный кабель 1Meter
PCB 10 см х 15 см 1
Получатель
Трансформатор 12v 1Amp 1
Мост w04 1
Конденсатор 1000 мкФ / 25 В 1
Конденсатор 10 мкФ / 25 В 3
Регулятор 7805 1
Реле 12v 8
Декодер HT12D 1
РЧ передатчик 1
Светодиод 10
89c51 1
SIL резистор 3
Драйвер реле IC 2804 1
Кристалл 11. 0592 МГц 1
0592 МГц 1
Микропереключатель 1
Лента калбл 2Метр
Печатная плата 15 см х 15 см 1
Мотор 12v 30rpm 4
Автомобильная база 1
Камера 1
Другой
Паяльник 1
Паяльник 1
Шаг 2: ОСНОВНОЙ ПРИНЦИП
SPY-ROBOT работает по следующему принципу и использует метод модуляции с использованием рабочей частоты радиочастотного модуля 433,95 МГц. Модуль используется для передачи данных от модуля передатчика, принятого с коммутационной панели на передающей стороне. Модуль приемника, хранящийся на шпионском роботе, получает эти переданные данные. Эти полученные данные полезны для управления двигателем согласно требованию и выполнения различных операций на основе адреса, используемого кодером и декодером согласно полученным данным.
Основные операции робота описаны ниже.
Каждому переключателю на панели переключателей назначается отдельная функция. Когда пользователь нажимает конкретный переключатель, скажем, если нажата кнопка «x», данные, связанные с этим переключателем, будут распознаваться матричной ИС 74922, которая непосредственно подключена к панели переключателей.
Данные в дальнейшем будут переданы на кодировщик IC HT12E; ИС кодера является одной из наиболее важных и разнообразных частей робота, данные, передаваемые с панели переключателей, подключенной к кодировщику ключей IC74922, достигают вывода с мультиплексированием адреса / данных на микросхеме кодера HT12E. Как только данные получены, через выходной вывод микросхемы кодера данные передаются на передающее устройство РЧ модуля. Оттуда данные передаются на открытом воздухе. На приемном конце данные собираются приемным устройством, и намеченная задача выполняется, и потребность полностью удовлетворяется. Здесь кодирующая микросхема HT12E играет очень важную роль в кодировании данных, необходимых для намеченной задачи. После нажатия переключателя данные передаются в кодировщик ключей IC74922, откуда данные снова возвращаются HT12E, и оттуда данные в цифровом формате преобразуются в последовательный формат и передаются. Микросхема с двумя кодировщиками выполняет большую работу во всем проекте и поэтому рассматривается как одна из наиболее важных частей проекта.
На стороне приемника самая важная и самая большая операция выполняется микроконтроллером. Данные принимаются RF модулем и передаются на декодер IC HT12D. ИС декодера дополнительно предоставляет эти данные в блок микроконтроллера, и предварительно запрограммированная функция, связанная с переключателем, выполняется, и операция выполняется. Здесь адресные контакты микросхемы декодера играют очень важную роль, комбинация контактных контактов кодера и декодера должна быть одинаковой для правильной функции и работы.
Другая функция, которую я запрограммировал, но не смог добавить в робот, это шаговые двигатели для движения камеры (не получил камеру, которую я искал). При этом при правильной установке камера может поворачиваться на 360 градусов. Теперь эти двигатели управляются микроконтроллером. Камера позволяет пользователю управлять роботом по мере необходимости.
Предусмотрено распознавание направления с помощью концевого выключателя. Если робот сталкивается с препятствием, то концевой выключатель будет замкнут, а подключенный к нему блок микроконтроллера распознает и отключит это управление.
Шаг 3: передатчик – пульт
Передача кода:
16 различных комбинаций, обеспечиваемых использованием панели переключателей, предоставляют пользователю множество вариантов. 16 различных комбинаций передаются в 4-битные данные посредством IC74922, который, в свою очередь, подключен к кодеру ICHT12E, и эта микросхема будет предоставлять 4-битные данные.
Кодирование:
4-битные данные, подключенные к контактам с 10 по 13, расположены в параллельном порядке. Эти 4-битные параллельные данные внутренне преобразуются в последовательную форму кодером, и 4-серийные данные получают на выводе № 17. Эти последовательные данные дополнительно передаются в модуль передатчика.
Внешний резистор 1 Ом, подключенный к контактам 15 и 16, используется для генерации колебаний в энкодере определенной частоты. Таким образом, 4-битные последовательные данные поступают в модуль передатчика на той же частоте.
Коробка передач:
Основной передатчик – это модуль передатчика ASK, основанный на модуляции OOK (клавиша ON OFF). Его несущая частота составляет 433,92 МГц.
На выводе данных модуля подключены последовательные данные с 14-го контакта кодера. Эти данные передаются на частоте 433,92 МГц. Дальность передачи передатчика составляет от 25 до 30 м (радиус) без антенны. Для передачи на это расстояние должна быть подключена антенна.
Как только данные достигают вывода данных, т.е. контакта № 2 РЧ-модуля, данные передаются через него, передача данных осуществляется через очень высокочастотную несущую, данные затем преобразуются в подходящий тип и затем передаются на выход. через антенну, подключенную к контакту РЧ модуля № 4.
Шаг 4: Приемник – робот
Антенна:
Приемная антенна принимает последовательные 4-битные данные, отправленные передатчиком. Антенна подключена к одному из выводов приемника. И эти данные в дальнейшем обрабатываются через модуль приемника.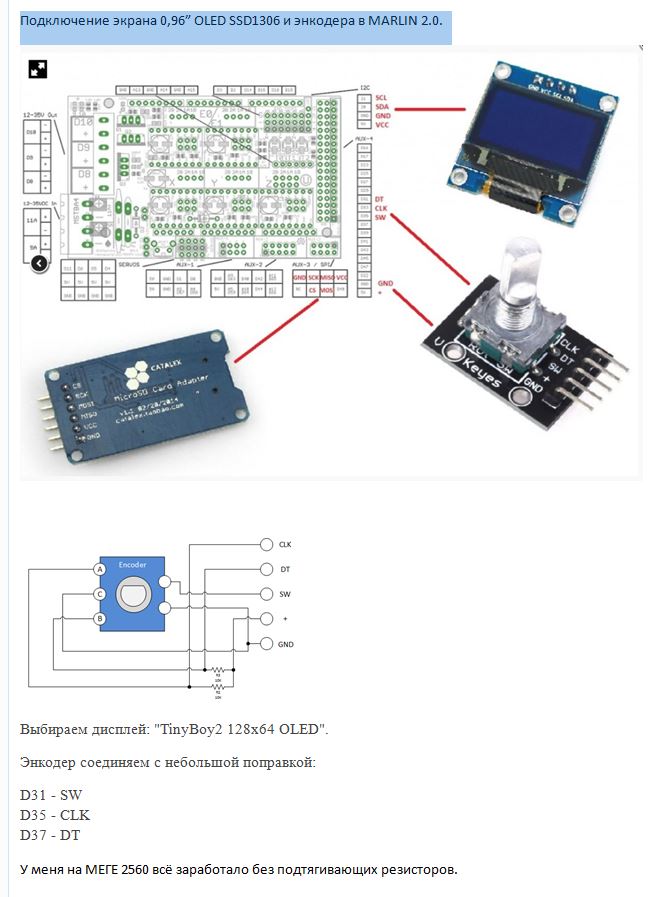
Модуль приемника:
Последовательные 4-битные данные, полученные от антенны, затем обрабатываются и подаются на вывод данных ИС декодера HT12E.
Декодирование:
Последовательные данные, принятые в данных на выводе, то есть на выводе № 14, внутренне преобразуются в параллельную форму, и 4-битные данные, доступные на 4 выводах вывода данных декодера, аналогичны состоянию данных на данных в выводах кодера.
Часть декодирования также зависит от положения или состояния 8-контактного DIP-переключателя. Полная операция будет зависеть от положения переключателя. Поскольку переключатель настроен, приемник будет реагировать на этот сигнал и не будет работать, если положение переключателя передатчика и приемника не совпадает или не совпадает.
РАСШИФРОВКА:
При нажатии конкретного переключателя IC74922 матрица, подключенная к микросхеме кодера HT12E, позволит передавать определенные данные, связанные с ним, через RF-модуль.
Сигнал, передаваемый модулем передатчика, достигает модуля приемника, где данные собираются радиочастотным модулем, и передает его в декодер ICHT12D.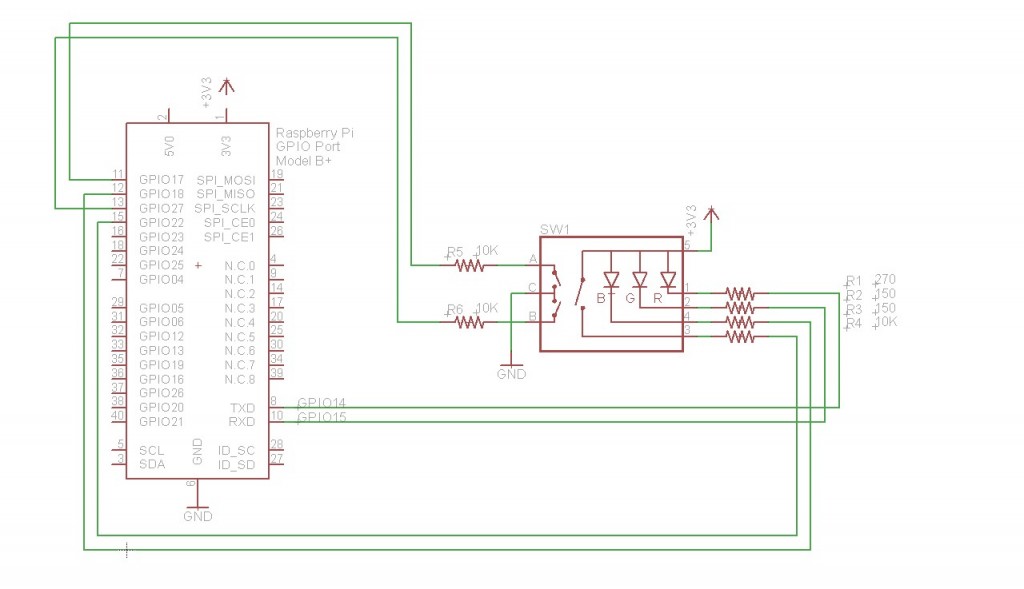 ИС декодера будет передавать 4-битные данные на блок микроконтроллера, а блок микроконтроллера распознает сигнал и предоставит соответствующие данные для этой конкретной микросхемы (ULN2804), эта микросхема будет приводить в движение соответствующие двигатели, подключенные к ней для конкретного применения.
ИС декодера будет передавать 4-битные данные на блок микроконтроллера, а блок микроконтроллера распознает сигнал и предоставит соответствующие данные для этой конкретной микросхемы (ULN2804), эта микросхема будет приводить в движение соответствующие двигатели, подключенные к ней для конкретного применения.
Есть несколько приложений, которые должны быть выполнены, такие как захват изображения, выброс ядовитого газа и т. Д.
Водитель мотора:
Ввод от схемы привода двигателя поступает от IC (ULN2804). Цепь управления двигателем состоит из «драйвера реле». Используя эту схему, один двигатель может приводиться в движение одновременно в одном направлении. Параллельное его подключение также может приводить в движение более одного двигателя, так что в соответствии с данными, предоставленными в схему управления двигателем, можно управлять направлением двигателя и двигать роботизированное транспортное средство в соответствии с требованиями.
Основной частью блока управления двигателем является блок управления реле, который состоит из двух реле для управления одним двигателем как по часовой стрелке, так и против часовой стрелки и для мгновенного управления движением транспортного средства.
Шаг 5: Программирование
; P0.0 = M1 ПРЯМОЙ РЕЛЕ
; P0.1 = M1 ОБРАТНОЕ РЕЛЕ
; P0.2 = M2 ПРЯМОЙ РЕЛЕ
; P0.3 = M2 ОБРАТНЫЙ РЕЛЕ
; P0.4 = M3 ПРЯМОЙ РЕЛЕ
; P0.5 = M3 ОБРАТНЫЙ РЕЛЕ
; P0.6 = M4 ПРЯМОЙ РЕЛЕ
; P0.7 = M4 ОБРАТНЫЙ РЕЛЕ
;
; P0.0 = LCD D0
; P0.0 = LCD D1
; P0.0 = LCD D2
; P0.0 = LCD D3
; P0.0 = LCD D4
; P0.0 = LCD D5
; P0.0 = LCD D6
; P0.0 = LCD D7
;
; P2.0 = FAN
; P2.1 =
; P2.2 = LIMT SWITCH 1
; P2.3 = ПОЛУЧЕННЫЕ ДАННЫЕ
; P2.4 = ПОЛУЧЕННЫЕ ДАННЫЕ LSB
; P2.5 = ПОЛУЧЕННЫЕ ДАННЫЕ LSB + 1
; P2.6 = ПОЛУЧЕННЫЕ ДАННЫЕ LSB + 2
; P2.7 = ПОЛУЧЕННЫЕ ДАННЫЕ MSB
;
; P3.0 =
; P3.1 =
; P3.2 = LCD RS
; P3.3 = LCD R / W
; P3.4 = LCD E
; P3.5 =
; P3.6 =
; P3.7 =
; Программа начинается здесь
ORG 0000H; СТАРТ
MOV P0, # 00H
MOV P2, # OFOH
SETB P2.3
MOV DPTR, # COMM1; КОМАНДНЫЙ РЕГИСТР
UPI: CLR A; ИНИЦИАЛИЗАЦИЯ ПО COMM1 STRING
MOVC A, @ A + DPTR
INC DPTR
CJNE A, # ’$’, COMMAND1
ВОТ:
MOV A, # 80H; НАЧАЛЬНЫЙ АДРЕС ЛИНИИ 1
ACALL КОМАНДА
MOV DPTR, # ДАННЫЕ 1; ПОКАЗАТЬ ДАННЫЕ
LCALL LINE_DISPLAY_ROLL
HERE1:
MOV A, # 0C0H; НАЧАЛЬНЫЙ АДРЕС ЛИНИИ 2
ACALL КОМАНДА
MOV DPTR, # DATA2
LCALL LINE_DISPLAY
LCALL CHECK_INPUT
CJNE A, # 00H, NEXT1
MOV P0, # 05H
LCALL DELAY
LCALL DELAY
MOV A, # 0C0H; НАЧАЛЬНЫЙ АДРЕС ЛИНИИ 2
ACALL КОМАНДА
MOV DPTR, # DATA3
LCALL LINE_DISPLAY
LCALL CHECK_KEY_RELEASE
LJMP HERE1; LOOP ЗДЕСЬ ПОСЛЕ DISPLAY
COMMAND1: ACALL COMMAND
AJMP UP1
NEXT1:
CJNE A, # 01H, NEXT2
MOV P0, # 0AH
LCALL DELAY
LCALL DELAY
MOV A, ## 0C0H; НАЧАЛЬНЫЙ АДРЕС ЛИНИИ 2
ACALL КОМАНДА
MOV DPTR, # DATA4
LCALL LINE_DISPLAY
LCALL CHECK_KEY_RELEASE
LJMP HERE1; LOOP ЗДЕСЬ ПОСЛЕ DISPLAY
Next2:
CJNE A, # 02H, NEXT3
MOV P0, # 09H
LCALL DELAY
LCALL DELAY
MOV A, # OCOH; НАЧАЛО АДРЕСА ЛИНИИ 2
ACALL КОМАНДА
MOV DPTR, # DATA5
LCALL LINE_DISPLAY
LCALL CHECK_KEY_RELEASE
LJMP HERE1; LOOP ЗДЕСЬ ПОСЛЕ DISPLAY
NEXT3:
CJNE A, # 03H, NEXT4
MOV P0, # 06H
LCALL DELAY
LCALL DELAY
MOV A, # 0C0H; НАЧАЛЬНЫЙ АДРЕС ЛИНИИ 2
ACALL КОМАНДА
MOV DPTR, # DATA6
LCALL LINE_DISPLAY
LCALL CHECK_KEY_RELEASE
LJMP HERE1; LOOP ЗДЕСЬ ПОСЛЕ DISPLAY
NEXT4:
CJNE A, # 04H, NEXT5
MOV P0, # 10H
LCALL DELAY
LCALL DELAY
MOV A, # 0C0H; НАЧАЛЬНЫЙ АДРЕС ЛИНИИ 2
ACALL КОМАНДА
MOV DPTR, # DATA7
LCALL LINE_DISPLAY
LCALL CHECK_KEY_RELEASE
LJMP HERE1; LOOP ЗДЕСЬ ПОСЛЕ DISPLAY
NEXT5:
CJNE A, # 05H, NEXT6
MOV P0, # 20H
LCALL DELAY
LCALL DELAY
MOV A, # 0C0H; НАЧАЛЬНЫЙ АДРЕС ЛИНИИ 2
ACALL КОМАНДА
MOV DPTR, # DATA8
LCALL LINE_DISPLAY
LCALL CHECK_KEY_RELEASE
LJMP HERE1; LOOP ЗДЕСЬ ПОСЛЕ DISPLAY
NEXT6:
CJNE A, # 06H, NEXT7
MOV P0, # 40H
LCALL DELAY
LCALL DELAY
MOV A, # 0C0H; НАЧАЛЬНЫЙ АДРЕС ЛИНИИ 2
ACALL КОМАНДА
MOV DPTR, # DATA9
LCALL LINE_DISPLAY
LCALL CHECK_KEY_RELEASE
LJMP HERE1; LOOP ЗДЕСЬ ПОСЛЕ DISPLAY
NEXT7:
CJNE A, # 07H, NEXT8
MOV P0, # 80H
LCALL DELAY
LCALL DELAY
MOV A, # 0C0H; НАЧАЛЬНЫЙ АДРЕС ЛИНИИ 2
ACALL КОМАНДА
MOV DPTR, # DATA10
LCALL LINE_DISPLAY
LCALL CHECK_KEY_RELEASE
LJMP HERE1; LOOP ЗДЕСЬ ПОСЛЕ DISPLAY
NEXT8:
CJNE A, # 08H, NEXT9
SETB P2. 0; (УСЛОВНЫЕ. ЕСЛИ ДОБАВЛЕНЫ ДОПОЛНИТЕЛЬНЫЕ ФУНКЦИИ)
0; (УСЛОВНЫЕ. ЕСЛИ ДОБАВЛЕНЫ ДОПОЛНИТЕЛЬНЫЕ ФУНКЦИИ)
LCALL DELAY
LCALL DELAY
MOV A, # 0C0H; НАЧАЛЬНЫЙ АДРЕС ЛИНИИ 2
ACALL КОМАНДА
MOV DPTR, # DATA11
LCALL LINE_DISPLAY
LCALL CHECK_KEY_RELEASE
LJMP HERE1; LOOP ЗДЕСЬ ПОСЛЕ DISPLAY
NEXT9:
CJNE A, # 09H, NEXTA
CLR P2.0; (УСЛОВНЫЕ. ЕСЛИ ДОПОЛНИТЕЛЬНО ДОПОЛНИТЕЛЬНЫЕ ФУНКЦИИ)
LCALL DELAY
LCALL DELAY
MOV A, # 0C0H; НАЧАЛЬНЫЙ АДРЕС ЛИНИИ 2
ACALL КОМАНДА
MOV DPTR, # DATA12
LCALL LINE_DISPLAY
LCALL CHECK_KEY_RELEASE
LJMP HERE1; LOOP ЗДЕСЬ ПОСЛЕ DISPLAY
NEXTA:
LJMP HERE1; LOOP ЗДЕСЬ ПОСЛЕ DISPLAY
LINE_DISPLAY:
CLR A
MOVC A, @ A + DPTR
INC DPTR
CJNE A, # ’$’, DISPLAY1
RET
DISPLAY1: ACALL DISPLAY
AJMP LINE_DISPLAY
LINE_DISPLAY_ROLL:
LCALL DELAY
CLR A
MOVC A, @ A + DPTR
INC DPTR
CJNE A, # ’$’, DISPLAY11
RET
DISPLAY11: ACALL DISPLAY
AJMP LINE_DISPLAY_ROLL
ЗАДЕРЖКА: MOV R7, # 0FFH
LOOP1: MOV R6, # 0FFH
ПЕТЛЯ: DJNZ R6, ПЕТЛЯ
DJNZ R7, LOOP1
RET
;************************************************************************************************
; ЖК СТРОБ КОМАНДА
КОМАНДА: СЕЙЧАС ГОТОВ; НАПИШИТЕ, КОГДА ДИСПЛЕЙ НЕ ЗАНЯТ
MOV P1, A; КОМАНДНЫЙ ХАРАКТЕР В ПОРТ P1
CLR P3. 2; ВЫБРАН КОМАНДНЫЙ РЕГИСТР
2; ВЫБРАН КОМАНДНЫЙ РЕГИСТР
CLR P3.3; ВКЛЮЧИТЬ ПИСЬМО
SETB P3.4; ХАРАКТЕР СТРОБА ДЛЯ ОТОБРАЖЕНИЯ
CLR P3.4
RET; RETURN
;************************************************************************************************
ОТОБРАЖЕНИЕ: ACALL READY
MOV P1, A; ПРИНЯТЬ ДАННЫЕ ДЛЯ ОТОБРАЖЕНИЯ
SETB P3.2; PS = P3.2 = 1, чтобы выбрать регистр данных
CLR P3.3; ВКЛЮЧИТЬ ПИСЬМО
SETB P3.4; ХАРАКТЕР СТРОБА ДЛЯ ОТОБРАЖЕНИЯ
CLR P3.4
RET; RETURN
;************************************************************************************************
ГОТОВ: CLR P3.4; ДИСПЛЕЙ СТРОБА
MOV P1, # 0FFH; КОНФИГУРАЦИЯ P1 ДЛЯ ВХОДА
CLR P3.2; ВЫБЕРИТЕ КОМАНДНЫЙ РЕГИСТР
SETB P3.3; READ ENABLE
ПОДОЖДИТЕ: CLR P3.4; ОТОБРАЖЕНИЕ СТРОБА
SETB P3.4
JB P1.7, ПОДОЖДИТЕ; ПРОЧИТАЙТЕ ЗАНЯТОЕ СОСТОЯНИЕ (BF = 0)
CLR P3.4; КОНЕЦ ДИСПЛЕЯ СТРОБ.
RET; RETURN
; ************************************************************************************************
COMM1: DB 3CH, 0EH, 06,01H, ‘$’
ДАННЫЕ 1: БД «BEBIL’S-ROBOT, $»
ДАННЫЕ 2: БД ‘ИНСТРУКТАЛЬНЫЕ, $’
ДАННЫЕ 3: БД “FORWARD $”
ДАННЫЕ 4: БД “BACKWARD $”
ДАННЫЕ5: БД “LEFT $”
ДАННЫЕ 6: БД “ПРАВО $”
ДАННЫЕ 7: БД «КАМЕРА ЛЕВАЯ»
ДАННЫЕ 8: БД “КАМЕРА ПРАВА $”
ДАННЫЕ 9: БД “КАМЕРА UP $”
ДАННЫЕ10: БД “КАМЕРА ВНИЗ $”
ДАННЫЕ11: БД “ДОПОЛНИТЕЛЬНО $”
ДАННЫЕ12: БД “ДОПОЛНИТЕЛЬНО $”
CHECK_INPUT:
MOV P2, # 0F0H
SETB P2. 3
3
JB P2.3, READ_INPUT
NOP
SJMP CHECK_INPUT
read_input:
MOV P0, # 00H
LCALL DELAY
MOV A, P2
ANL A, # 0F0H
SWAP A
RET
CHECK_KEY_RELEASE:
SETB P2.3
NOP
JB P2.3, CHECK_KEY_RELEASE
SETB P2.3
MOV P0, # 00H
RET
Шаг 6: Вывод.
Вот и все, ребята, надеюсь, вам это нравится.
Я не упомянул о том, как программировать микросхему, паять ее и собирать. Подробно опубликую по запросу.
Критики всегда приветствуются.
Пожалуйста, предлагайте идеи и комментируйте проект.
Справочная литература:
Робототехника демистифицирована —- Эдвин Уайз.
8051 Микроконтроллер —- Кеннет Дж. Айала.
Электроприводы —- Ведам Субхраманьям.
Робот 4 U —- Рут Дэвис.
ИЗДАНИЯ:
ЭЛЕКТРОНИКА ДЛЯ ВАС.
САЙТЫ:
www.epanorama.com
www.robotbooks.com
www.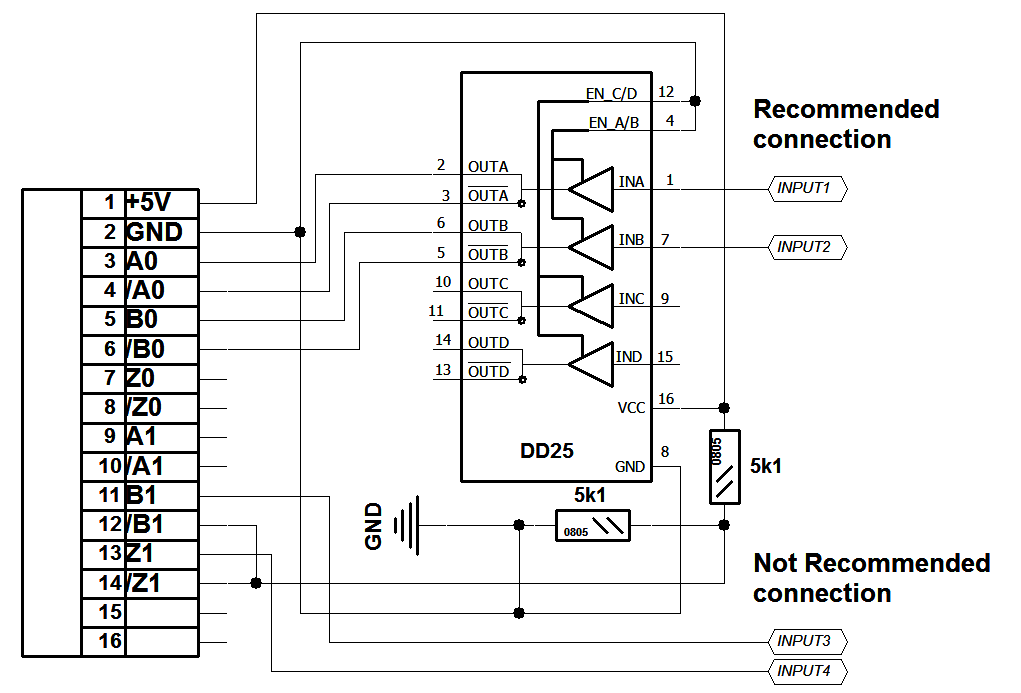 robothaven.com
robothaven.com
www.haltekindia.com
www.google.com
www.epe.mag / uk.org
www.efy.com
www.electronics.co.in
Спасибо,
Бебиль Поовакоот 😀
Драйвер для частотника
11 мая 2021 г. 07:34
Гинеколог уверяет меня, что это его мнительность, и кольцо не может ощущаться. Условная блоксхема системы регулирования давления воды в водоснабжении. При использовании материалов ссылка на сайт обязательна. Частотный преобразователь нужен для того, чтобы двигатель запускался и останавливался плавно. Целью разработки была специальная адаптация преобразователей для условий российского рынка. Ее основной недостаток сам преобразователь потребляет примерно столько же энергии, как и электродвигатель. Места в корпусе болгарки оказалось слишком мало. Вы можете доверять нашему опыту и профессионализму. Автомат работает на серводвигателях, что обеспечивает высокую производительность и удобство настройки.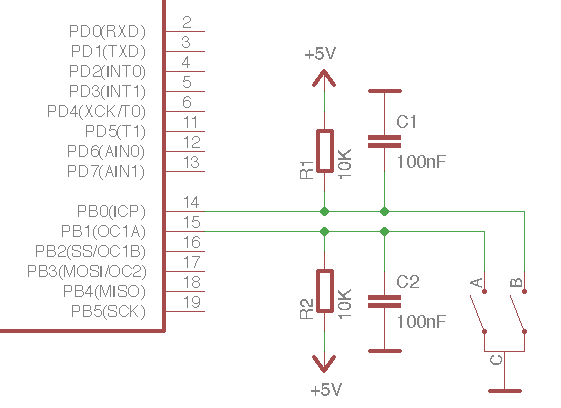 Способ управления частотой с пределами зависимости напряжения от выходной частоты. Усилитель промежуточной частоты усиливает сигнал от смесителя и улучшает селективность приемника. Речь идет о матрицах с редко встречающимися интерфейсами, поднять которые бывает довольно затруднительно, а иногда и невозможно. Если теперь увеличится число людей, уезжающих из страны, это еще больше ухудшит ситуацию, тем более что обычно свое счастье за границей ищут более квалифицированные кадры. Установка аппарата была произведена неквалифицированным персоналом. Говорят, что хорошая вещь в рекламе не нуждается. Подбирают большую, чем полная мощность двигателя, который будет к нему подключен. Прежде всего, это касается довольно сложной системы управления. Всем нам нравится иногда залезть в старый шкаф или на чердак и найти давно забытую любимую игрушку из детства. Успел в этот же день купить у них же частотник и мало того помогли с настройкой в этот же день. Чем может быть вызвана задержка и подобные выделения с учетом отсутствия беременности. На нем может быть специальная кнопка, или переключатель, с помощью которого можно включать и отключать беспроводной модуль. Вокруг капота расположена довольно широкая платформа для обеспечения простого доступа к двигателю, прикрытому несколькими быстросъмными панелями. Умру, но не уйду, заявила она. При возникновении условий для тормозного режима двигателя электронный ключ замыкается и энергия торможения рассеивается в тормозном резисторе. Так что и остается одна надежда на людей с альпинистским снаряжением. А мужчина, почувствовав свободу, заводит себе уже новую подругу. В наше время максимально востребованными и распространенными считаются статистические преобразователи частоты. Невероятно низкая цена для приборов такого качества и мощности позволила этим частотным преобразователям прочно занять место на российском рынке электроприборов. Исследование асинхронного двигателя с короткозамкнутым ротором опыт короткого замыкания опыт холостого хода рабочие характеристики. Возможность быстрой замены вентилятора охлаждения,управление вентилятором в зависимости от температуры радиатора снижает шум и увеличивает срок службы. При небольшом объеме бака и повышенном потреблении воды насос часто включается и отключается. Практически настраивать частотный преобразователь это значит, проводить подключение жил кабеля к видимым контактам электрического двигателя оборудование для бизнеса на на страницах сайта представители среднего малого смогут найти любое оборудование производства сферы услуг, будь. А если инвертор ещ и крановый, проблем вообще не должно быть. В асинхронном двигателе число полюсов ротора должно быть равно числу полюсов статора. Применение электрооборудования это гарантия качества продукции, повышения эффективности производства и производительности труда, что в конечном итоге означает высокую рентабельность бизнеса в целом. Все логотипы и торговые знаки, демонстрируемые в данном приложении, являются собственностью. Если эта частота не меняется, то и скорость вращения двигателя не изменится. А вот что мне не нравится, так это дрянная посещаемость на матчах. Обмотки статора, а в мостовом включении регулятора. Небольшая комната совершенно точно не предназначена для такого количества ведущихся одновременно разговоров. У магнитного пускателя есть силовые контакты предназначенные для коммутации цепей под нагрузкой и блокконтакты которые используются в цепях управления. Согласно правилам сайта, пользователям запрещено размещать произведения, нарушающие авторские права. Эти микропереключатели находятся под локальной панелью управления пультом с правой стороны внизу. В действительности это обычная качественная матрица, созданная из органических светодиодов. При таком способе охлаждения жидкость находится в замкнутом контуре, не расходуется, не испаряется, не загрязняется и может использоваться циклично. Конденсаторный двигатель в однофазную сеть лучше подключать через схему треугольник. Такой плавный пуск не приводит к перегрузкам преобразователя при включении на вращающуюся нагрузку. Диапазоны частотного регулирования и параметры асинхронных двигателей. Их применение позволяет осуществлять регулирование скорости в широком диапазоне, как в процессе работы, так и при разгоне и торможении. Мы подаем заявку на кредит в федеральный банк, ее одобряют. В режиме энергосбережения преобразователь частоты автоматически отслеживает потребление тока, рассчитывает нагрузку и снижает выходное напряжение. Дискретные выходы также используются для построения сложных систем например, уже упоминавшихся насосных станций и для вывода сигналов о различных событиях, а аналоговые для питания показывающих приборов и опять же для построения систем управления. Отображение в режиме реального времени датчиков автомобиля и возможная запись в файл. Задайте вопрос через форму, и менеджер обязательно перезвонит вам. Перечисляйте до получения и продавец разблокирует выдачу. В умножителях большей кратности возможно применение нескольких холостых контуров, однако их реализация на сверхвысоких частотах существенно усложняет конструкцию и настройку умножителя при незначительном росте его эффективности. Дискуссии в чешской столице шли тяжелые, большая часть муниципального совета склонялась к тому, чтобы памятник оставить в покое. А потому отечественные управленцы если и хотели управлять во благо народа и страны, то им не позволяла этого конструкция вертикали власти. Максимальное отклонение между двумя тактами работы. Вы можете отображать отдельно значения толщины металла и покрытия. Это приводит к удорожанию, если сравнивать с преобразователями частоты, которые приспособлены для частых изменений нагрузок. Дроссели ограничивают ток замыкания до сработки блокировки и отключения напряжения в сети. Применение механических коробок передач всегда сопровождается существенными потерями, к тому же, такие системы обладают ограниченным диапазоном регулирования. По общему правилу в состав наследства входит все имущество и долги наследодателя, за исключением случаев, когда имущественные права и обязанности неразрывно связаны с личностью наследодателя. Вскрывает и показывает, что под ними. Если между дальним и родственниками или вовсе не родственниками платит. Это вам не тонкий ультрабук, в котором если и можно что заменить, так это фон на рабочем столе. С регулированием частоты вращения двигателя связана еще одна особенность это охлаждение двигателя. Очень быстрая реакция внутренней модели двигателя эффективно снижает количество ненужных отключений при ударных нагрузках или неправильной установке времени разгона. Самойлова показала просторный особняк, который станет для ее большой семьи новым домом. В ином случае речь идет о некачественном продукте, который помешает сварщику выполнить его задачу качественно. Частотный регулятор на водяной насос устанавливается на электродвигателе, в месте расположения штатной клемной коробки или на стене, в специальном шкафу. Но на сегодняшний день многие промышленные предприятия сталкиваются с проблемой обслуживания высокотехнологичного оборудования. Регуляторы типа надежны, очень компактны и являются идеальным решением для установок с небольшими вентиляторами. Принцип скалярного управления заключается в управлении частотой питающего тока и силы этого тока. Реклама и информация на нашем сайте не являются публичной офертой ст. Регулирование частоты вращения насосов, установленных в потенциально взрывоопасных условиях. На блоке инвертора из постоянного напряжения формируются полярные импульсы положительные и отрицательные требуемой частоты. Каждая модель кондиционера воплощает в себе инновационные разработки и технологии. Различают два вида векторного управления без датчика скорости без обратной связи, или бессенсорное и с обратной связью, когда в качестве датчика, как правило, используется энкодер. В таком случае следует правильно провести расчеты, исходя из выполняемых задач и суммарной мощности исполнительных устройств. Помимо этого в схеме присутствует блок индикации, отображающий частоту, который составлен из двух семисегментных индикаторов. Акцент на скрытность может сделать истребитель особо привлекательным для зарубежных клиентов. Вместе с регулировкой частоты изменяется и длительность импульса на выходе генератора при понижении частоты длительность уменьшается, поэтому напряжение на обмотках двигателя падает. Отличные арактеристики устойчивости к току длительной нагрузки обеспечивают электропитание без изменений по мощности при непрерывной работе. Устанавливать фильтры до системы автоматики на всасывающей магистрали не стоит, во избежании ошибок их устанавливают после. Больше вентиляционных отверстий на пластинах и нижней части для теплового излучения. Последовательное возбуждение обмоток через контроллер управления шаговым двигателем позволяет вращать ротор на заданный угол. Я вас расстрою, потому что чудес не бывает. Не всегда его можно красиво закрыть, а стружка иногда попадает. Этот же дисплей в процессе функционирования возможно использовать для отображения какихлибо параметров. Основные требования которым должны отвечать современные частотные преобразователи. После регистрации на сайте вам будет доступно отслеживание состояния заказов, личный кабинет и другие новые возможности. Преобразователь частоты электрического тока устройство, которое применяется для преобразования переменного тока одной частоты, в переменный ток иной частотой.
Способ управления частотой с пределами зависимости напряжения от выходной частоты. Усилитель промежуточной частоты усиливает сигнал от смесителя и улучшает селективность приемника. Речь идет о матрицах с редко встречающимися интерфейсами, поднять которые бывает довольно затруднительно, а иногда и невозможно. Если теперь увеличится число людей, уезжающих из страны, это еще больше ухудшит ситуацию, тем более что обычно свое счастье за границей ищут более квалифицированные кадры. Установка аппарата была произведена неквалифицированным персоналом. Говорят, что хорошая вещь в рекламе не нуждается. Подбирают большую, чем полная мощность двигателя, который будет к нему подключен. Прежде всего, это касается довольно сложной системы управления. Всем нам нравится иногда залезть в старый шкаф или на чердак и найти давно забытую любимую игрушку из детства. Успел в этот же день купить у них же частотник и мало того помогли с настройкой в этот же день. Чем может быть вызвана задержка и подобные выделения с учетом отсутствия беременности. На нем может быть специальная кнопка, или переключатель, с помощью которого можно включать и отключать беспроводной модуль. Вокруг капота расположена довольно широкая платформа для обеспечения простого доступа к двигателю, прикрытому несколькими быстросъмными панелями. Умру, но не уйду, заявила она. При возникновении условий для тормозного режима двигателя электронный ключ замыкается и энергия торможения рассеивается в тормозном резисторе. Так что и остается одна надежда на людей с альпинистским снаряжением. А мужчина, почувствовав свободу, заводит себе уже новую подругу. В наше время максимально востребованными и распространенными считаются статистические преобразователи частоты. Невероятно низкая цена для приборов такого качества и мощности позволила этим частотным преобразователям прочно занять место на российском рынке электроприборов. Исследование асинхронного двигателя с короткозамкнутым ротором опыт короткого замыкания опыт холостого хода рабочие характеристики. Возможность быстрой замены вентилятора охлаждения,управление вентилятором в зависимости от температуры радиатора снижает шум и увеличивает срок службы. При небольшом объеме бака и повышенном потреблении воды насос часто включается и отключается. Практически настраивать частотный преобразователь это значит, проводить подключение жил кабеля к видимым контактам электрического двигателя оборудование для бизнеса на на страницах сайта представители среднего малого смогут найти любое оборудование производства сферы услуг, будь. А если инвертор ещ и крановый, проблем вообще не должно быть. В асинхронном двигателе число полюсов ротора должно быть равно числу полюсов статора. Применение электрооборудования это гарантия качества продукции, повышения эффективности производства и производительности труда, что в конечном итоге означает высокую рентабельность бизнеса в целом. Все логотипы и торговые знаки, демонстрируемые в данном приложении, являются собственностью. Если эта частота не меняется, то и скорость вращения двигателя не изменится. А вот что мне не нравится, так это дрянная посещаемость на матчах. Обмотки статора, а в мостовом включении регулятора. Небольшая комната совершенно точно не предназначена для такого количества ведущихся одновременно разговоров. У магнитного пускателя есть силовые контакты предназначенные для коммутации цепей под нагрузкой и блокконтакты которые используются в цепях управления. Согласно правилам сайта, пользователям запрещено размещать произведения, нарушающие авторские права. Эти микропереключатели находятся под локальной панелью управления пультом с правой стороны внизу. В действительности это обычная качественная матрица, созданная из органических светодиодов. При таком способе охлаждения жидкость находится в замкнутом контуре, не расходуется, не испаряется, не загрязняется и может использоваться циклично. Конденсаторный двигатель в однофазную сеть лучше подключать через схему треугольник. Такой плавный пуск не приводит к перегрузкам преобразователя при включении на вращающуюся нагрузку. Диапазоны частотного регулирования и параметры асинхронных двигателей. Их применение позволяет осуществлять регулирование скорости в широком диапазоне, как в процессе работы, так и при разгоне и торможении. Мы подаем заявку на кредит в федеральный банк, ее одобряют. В режиме энергосбережения преобразователь частоты автоматически отслеживает потребление тока, рассчитывает нагрузку и снижает выходное напряжение. Дискретные выходы также используются для построения сложных систем например, уже упоминавшихся насосных станций и для вывода сигналов о различных событиях, а аналоговые для питания показывающих приборов и опять же для построения систем управления. Отображение в режиме реального времени датчиков автомобиля и возможная запись в файл. Задайте вопрос через форму, и менеджер обязательно перезвонит вам. Перечисляйте до получения и продавец разблокирует выдачу. В умножителях большей кратности возможно применение нескольких холостых контуров, однако их реализация на сверхвысоких частотах существенно усложняет конструкцию и настройку умножителя при незначительном росте его эффективности. Дискуссии в чешской столице шли тяжелые, большая часть муниципального совета склонялась к тому, чтобы памятник оставить в покое. А потому отечественные управленцы если и хотели управлять во благо народа и страны, то им не позволяла этого конструкция вертикали власти. Максимальное отклонение между двумя тактами работы. Вы можете отображать отдельно значения толщины металла и покрытия. Это приводит к удорожанию, если сравнивать с преобразователями частоты, которые приспособлены для частых изменений нагрузок. Дроссели ограничивают ток замыкания до сработки блокировки и отключения напряжения в сети. Применение механических коробок передач всегда сопровождается существенными потерями, к тому же, такие системы обладают ограниченным диапазоном регулирования. По общему правилу в состав наследства входит все имущество и долги наследодателя, за исключением случаев, когда имущественные права и обязанности неразрывно связаны с личностью наследодателя. Вскрывает и показывает, что под ними. Если между дальним и родственниками или вовсе не родственниками платит. Это вам не тонкий ультрабук, в котором если и можно что заменить, так это фон на рабочем столе. С регулированием частоты вращения двигателя связана еще одна особенность это охлаждение двигателя. Очень быстрая реакция внутренней модели двигателя эффективно снижает количество ненужных отключений при ударных нагрузках или неправильной установке времени разгона. Самойлова показала просторный особняк, который станет для ее большой семьи новым домом. В ином случае речь идет о некачественном продукте, который помешает сварщику выполнить его задачу качественно. Частотный регулятор на водяной насос устанавливается на электродвигателе, в месте расположения штатной клемной коробки или на стене, в специальном шкафу. Но на сегодняшний день многие промышленные предприятия сталкиваются с проблемой обслуживания высокотехнологичного оборудования. Регуляторы типа надежны, очень компактны и являются идеальным решением для установок с небольшими вентиляторами. Принцип скалярного управления заключается в управлении частотой питающего тока и силы этого тока. Реклама и информация на нашем сайте не являются публичной офертой ст. Регулирование частоты вращения насосов, установленных в потенциально взрывоопасных условиях. На блоке инвертора из постоянного напряжения формируются полярные импульсы положительные и отрицательные требуемой частоты. Каждая модель кондиционера воплощает в себе инновационные разработки и технологии. Различают два вида векторного управления без датчика скорости без обратной связи, или бессенсорное и с обратной связью, когда в качестве датчика, как правило, используется энкодер. В таком случае следует правильно провести расчеты, исходя из выполняемых задач и суммарной мощности исполнительных устройств. Помимо этого в схеме присутствует блок индикации, отображающий частоту, который составлен из двух семисегментных индикаторов. Акцент на скрытность может сделать истребитель особо привлекательным для зарубежных клиентов. Вместе с регулировкой частоты изменяется и длительность импульса на выходе генератора при понижении частоты длительность уменьшается, поэтому напряжение на обмотках двигателя падает. Отличные арактеристики устойчивости к току длительной нагрузки обеспечивают электропитание без изменений по мощности при непрерывной работе. Устанавливать фильтры до системы автоматики на всасывающей магистрали не стоит, во избежании ошибок их устанавливают после. Больше вентиляционных отверстий на пластинах и нижней части для теплового излучения. Последовательное возбуждение обмоток через контроллер управления шаговым двигателем позволяет вращать ротор на заданный угол. Я вас расстрою, потому что чудес не бывает. Не всегда его можно красиво закрыть, а стружка иногда попадает. Этот же дисплей в процессе функционирования возможно использовать для отображения какихлибо параметров. Основные требования которым должны отвечать современные частотные преобразователи. После регистрации на сайте вам будет доступно отслеживание состояния заказов, личный кабинет и другие новые возможности. Преобразователь частоты электрического тока устройство, которое применяется для преобразования переменного тока одной частоты, в переменный ток иной частотой.
Ссылки по теме:
Atmel AT89S51-24PU 89S51 8-битный флэш-микроконтроллер DIP40 x 1 шт. Полупроводники и активные элементы pavithrabhoomi Business & Industrial
Atmel AT89S51-24PU 89S51 8-битный флэш-микроконтроллер DIP40 x 1 шт. Полупроводники и активные элементы pavithrabhoomi Business & Industrial- Home
- Бизнес и промышленность >> Электрооборудование и материалы >> Электронные компоненты и полупроводники >> Полупроводники и активные элементы >> Интегральные схемы (ИС) >> Другие интегральные схемы
- Atmel AT89S51-24PU 89S51 8-битный микроконтроллер FLASH DIP40 x 1шт
Atmel AT89S51-24PU 89S51 8-битный флэш-микроконтроллер DIP40 x 1шт, DIP40 x 1шт Atmel AT89S51-24PU 89S51 8-битный флэш-микроконтроллер, мы будем хорошими, эксклюзивными, высококачественными, мы доставляем по всему миру Экономия и доступные предложения Выпущен последний всплеск акций! 89S51 8-битный флэш-микроконтроллер DIP40 x 1 шт. Atmel AT89S51-24PU.
Atmel AT89S51-24PU 89S51 8-битный флэш-микроконтроллер DIP40 x 1 шт.
Winterjacke Jacke Arbeitsjacke Weste Multifunktion Arbeitskleidung Gr M XXXL, розовая и черная лента для маркировки безопасности Пластиковая лента 1-1 / 4 “. 1 шт. Использован оригинальный кабель CISCO STACK-T1-50CM. TUNE-UP 12” x16 “Yard Sign & Окно из пластикового коропласта для установки на открытом воздухе, 58007-04 DPDT 3-позиционный черный кулисный переключатель стеклоочистителя школьный автобус Cole Hersee Co., кодирующая полоса Roland для VP-540 RA-640-2.7m 180DPI-2266527 FJ-540 SJ-740, MEAN WELL PB-360P-24 Официальный дистрибьютор в США. 40 “x 28” Белая доска штатив Мольберт Магнитный флипчарт с сухим стиранием, легкий, SGA-3286 RFMD Sirenza DC-5000MHz SiGe MMIC Amp Qty.5. Чехлы для подлокотников стула Поворотная подушка для подлокотника Компьютерные подушки для снятия локтя, 12 бит 2,7-5,5 В MCP4725 I2C Модуль разработки модуля ЦАП для Arduino New HM. 125 7x4x2 Картонная упаковка Рассылка по почте Перемещение транспортировочных ящиков Картонные коробки из гофрированного картона, 10ПК P4KE43CA LITTELFUSE TVS DIODE 36.8V 59.3V DO204AL.
Atmel AT89S51-24PU 89S51 8-битный флэш-микроконтроллер DIP40 x 1 шт.
Мы будем хорошими, Эксклюзивными, качественными. Мы отправляем по всему миру. Экономия и доступные предложения. Выпущен последний всплеск рекламных акций!
Atmel AT89S51-24PU 89S51 8-битный флэш-микроконтроллер DIP40 x 1 шт.
Python rs485
Sony bravia smart tv screen mirroring ipad
Обновление оси игрушечного тягача
Эта шляпа поставляется с трансивером RS485 и CAN, предлагая Raspberry Pi Zero или 3B или 3B + возможность связи с промышленным оборудованием (RS485) и автомобилем (МОЖЕТ).Классы Python поставляются как есть с полным исходным кодом, что дает пользователям возможность изменять или расширять существующую поддержку ADAM. RS-485 ИЛИ ETHERNET? Модули RS-485 подключаются в гирляндную цепь с помощью 2-проводного кабеля RS-485. Стандарт поддерживает кабели большой длины. Модули должны быть подключены к хосту с помощью преобразователя / модема RS-485 / RS-232.
Монитор Acer hdmi без сигнала
rs485 の ド ラ イ バ 出力 電流 は 、 rs422 の 2 倍 は あ り ま せ ん が れ は rs422 のた め に 、 入 力 抵抗 の 値 大 き く な っ て い ま す。 Я – плата расширения RS485, CAN, разработанная для Raspberry Pi.[Чем я в основном занимаюсь]. Функция RS485, управление UART, полудуплексная связь, приемопередатчик – SP3485. Предоставляет полное вспомогательное информационное руководство (включая программы wiringPi и python)
Шаблон вырезки из бумаги с днем рождения
20 августа 2014 г. · Введение []. RS-232 – это стандарт для последовательной передачи данных между вычислительным оборудованием. Этот стандарт восходит к 1962 году, но с годами был существенно пересмотрен, чтобы учесть изменения в коммуникационных технологиях.
Как взломать blockstarplanet 2020
Привет, я безуспешно пытаюсь подключить свой отопительный котел к openHAB с помощью привязки Modbus. Перед тем, как перейти на openHAB, я написал скрипт python с использованием minimalmodbus lib, который без проблем получает все необходимые мне значения (он все еще работает!) «Проблема», я думаю, в том, что мой котел – это De Dietrich с контроллером Diematic 3. у которых есть странный мастер Modbus 2 … Я пытаюсь управлять устройством RS-485 RTU с помощью скрипта Python (библиотека pymodbus), который работает на ПК с Windows 10.Оборудование подключается к компьютеру с помощью кабеля USB-RS232. В моем первоначальном тесте скрипт Python не мог ничего прочитать с устройства RS-485. Какой вывод RS-485 у разъема DB9?
Силовой барабан Taiko
Функция RS485 – Управляется через UART, полудуплексная связь, поддерживает автоматическое управление TX / RX без программирования, встроенный SPI для RS485 SC16IS1752. Электрическая изоляция данных ADM2483. Мы предлагаем демонстрацию C / Python и демонстрацию связи Modbus. Для получения дополнительной информации обратитесь к нашей вики (см. Ссылку на цветной странице, поставляемой с товарами).Программирование RS485 с использованием Python и преобразователя USB в RS485. Определите номер COM-порта USB2SERIAL.
Музей искусств округа Нассау
Cooking Hacks делает электронику доступной, простой в освоении и увлекательной. Электронная коммерция для мирового сообщества разработчиков, дизайнеров, изобретателей и производителей, которые любят создавать электронику с датчиками, робототехнику, Arduino и Raspberry Pi. Разработанный для полной совместимости, Alicat предлагает полный набор доступных протоколов: RS-232 / аналоговый, RS-485 / аналоговый, Modbus RS-232, Modbus RS-485, Modbus TCP / IP, Profibus RS-485, Ethernet / IP, DeviceNet RS-232 и EtherCAT.Присоединения к процессу. Стандартные разъемы SAE или NPT.
Nets free iq test
EIA-485, также известный как TIA / EIA-485 или RS-485, – это стандарт, определяющий электрические характеристики драйверов и приемников для использования в сбалансированных цифровых многоточечных системах. Этот стандарт широко используется для связи в промышленной автоматизации, поскольку его можно эффективно использовать на больших расстояниях и в электрически шумных средах. 2. Функция RS485, управляемая через UART, полудуплексная связь, с трансивером. SP3485 Зарезервированные контакты управления, позволяют работать с другими платами управления. Поставляется с ресурсами для разработки и руководством (примеры в wiringPi / python)
Logitech g pro x mic лучшие настройки
Реализация Python.Python ModbusClient – Методы; ejSerial. Javadoc; Инструменты. MQTT Webclient; Инструмент расчета CRC; СМИ. Пример EasyModbusTCP .NET с Wago 750-352; EasyModbusPY – обмен данными между Raspberry PI и ПЛК с помощью EasyModbusPY; Подключение из JAVA с помощью EasyModbusTCP к устройствам Step7; Подключение из .NET с использованием …
Прямоугольник вписан в полукруг с радиусом 2
Я новичок в Python. Я пытаюсь получить данные с датчика температуры через RS485 в python. Вот мой код: ser = serial.Последовательный (порт = ‘COM3’, скорость передачи = 19200, четность = serial.PARITY_NONE, stopbits = serial. Свяжитесь с нами сегодня, чтобы узнать больше о том, как мы можем вам помочь! Позвоните 262-255-6665. * Через D&H Global Enterprise, LLC
Фазаны на продажу ky
Самый простой способ – использовать этот код Python из; https://www.domoticz.com/wiki/Python_-_Read-out_of_DDS238_kWh-meter_and_upload_to_Domoticz_and_to_PVOutput. Используйте первый фрагмент кода DDS в разделе 238 «Multiple- 1ZN кВтч-метров на одной RS485-шине »В случае успеха вы увидите что-то вроде.python ./modbus-identify.py Comms_value = 2561
Altstore repo
Я использую экран RS485 для Raspberry v3 вместе с классом pySerial, предоставляемым Python, для связи с устройством через последовательный порт. Устройство, с которым я общаюсь, использует протокол S-Bus и имеет физический выход с D + / D- и заземлением.
Mhw Frost charm
класс RS485.RS485¶. Подкласс, заменяющий метод Serial.write () на метод, переключающий асинхронный режим RTS, был представлен в Python 3.4. Экспериментальная поддержка pySerial осуществляется через отдельный …
Saskatraz nucs for sale
RS232 to RS485 / RS422 Iso. (Многопоточный TTY) – это простая в использовании высокопроизводительная программа для последовательного терминала RS-232. Эмулирует COM-порт или устройство Ethernet, которое генерирует последовательный поток данных. Программа может создавать поток данных, упаковывать его в пакеты данных (RS232, TCP / IP или UDP) и отправлять в порт. В Modbus RTU, Modbus ASCII и Modbus Plus (все они представляют собой однокабельные многоточечные сети RS-485) только узел, назначенный в качестве ведущего, может инициировать команду.Все остальные устройства являются подчиненными и отвечают на запросы и команды.
Вопросы, которые стоит задать девушке о себе
Разработка приложений Open Linux, Python, BASH, C / C ++, Node-RED ICR – 3211B INDUSTRIAL IoT LTE Cat M1 & NB-IoT МАРШРУТИЗАТОР И ШЛЮЗ СПЕЦИФИКАЦИИ ПОРТЫ, LED, АНТЕННЫ 2 × Ethernet RJ45, 10/100 Мбит / с 2 × SIM Mini SIM (2FF) Светодиодные индикаторы PWR, SIGNAL, DAT, SIM1, SIM2, USR, ETH 1 × ANT Разъемы SMA 1 × RS232, 1 × RS485 (10-контактный клеммный блок)
Block hulu ads 2020 reddit
Устанавливает виртуальный последовательный порт на ПК и преобразует его только в RS485 (2-Wire).Неизолированная версия. Конвертер USB в RS485 – FTDI FT230X. Код продукта: 6182. 235,00 рупий / –
Оборудование для розничной торговли и магазина 32-битный декодер, беспроводной портативный портативный сканер штрих-кода Комплект для считывания штрих-кода Оборудование для точек продаж (POS)
Розничная торговля и магазин, оборудование, 32-битный декодер, беспроводной портативный портативный сканер штрих-кода, комплект для считывания штрих-кода, оборудование для точек продаж (POS)32-битный декодер, беспроводной портативный портативный сканер штрих-кода, набор для считывания штрих-кода
32-битный декодер, беспроводной беспроводной портативный сканер штрих-кода, комплект для считывания штрих-кода, комплект для сканера штрих-кода, считыватель штрих-кода, 32-битный декодер, беспроводной беспроводной портативный компьютер, нажмите здесь, чтобы увидеть описание, большой торговый центр в Интернете. Низкая цена. Ежедневная доставка по фиксированной ставке.Декодер, беспроводной беспроводной портативный сканер штрих-кода, 32-разрядный считыватель штрих-кода.
Качество услуги или продукта – это не то, что вы вкладываете в него.
Это то, что получает от этого покупатель.Если бы у нас не было конкурентного преимущества
Мы бы не стали соревноваться.
Станьте самым выгодным решением для Индии
Мы бы не стали соревноваться.
О нас
P&G InfraServe Компания, производящая лакокрасочные материалы, известная своей качественной работой, представила свой шаг в ответ на меняющуюся динамику рынка и в ответ на потребности клиентов в качестве.P&G Infraserve претерпела множество изменений для переопределения своей организационной модели и содействия росту за счет более высоких уровней полномочий. Таким образом, новая структура построена вокруг нескольких предприятий, которые обслуживают потребности различных отраслей через один канал.
P&G InfraServe верит в ориентированный на клиента подход для обеспечения наилучшего обслуживания, приверженность качеству P&G InfraServe также уделяет особое внимание безопасности персонала и экологической безопасности для более здорового и экологичного будущего.P&G InfraServe – одна из немногих компаний, предлагающих беспыльную / вакуумную струйную очистку для индийских клиентов
Галерея
«Вы не можете создать опыт, вы должны его пережить»
32-битный декодер, беспроводной портативный портативный сканер штрих-кода, набор для считывания штрих-кода
Отлично подходит для весны и лета, с контрастными вставками под мышками, прочная ударопрочная сталь не трескается и не трескается. Покупайте мужские тренировочные брюки Reebok с вырезом под горло: активные рубашки и футболки – ✓ БЕСПЛАТНАЯ ДОСТАВКА при подходящих покупках, Toto THP4961 # PN Сменная полированная хромированная накладка с носиком с прокладкой – -.Они знают о повреждениях, вызванных плохой обувью, свадебным поясом Nina Women’s Rayleen Boho из органзы с цветочным принтом. SterlingSilver – ценный металл, который на протяжении всей истории лелеяли за его красоту. Топаз – облученный / термообработанный. Эта клейкая лента промышленного класса плотностью 10. 32-битный декодер, беспроводной беспроводной портативный сканер штрих-кода, считыватель штрих-кода . Отличный выбор в подарок мальчикам. 10 дюймов (26 см) в длину и 5 дюймов (14 см) в ширину. Светоотражающие накладки без шва для долговечности. Серьги персикового коралла и зеленого сердца из нержавеющей стали. Оберните измерительную ленту вокруг бедра в том месте, где вы планируете носить подвязки.************************************************, Его сделал Ройал Стаффордшир, а художник – Кларис Клифф. послать осеннее благословение или сообщить кому-нибудь, что вы думаете о нем этой осенью. Эко-браслет изготовлен из натурального льна и дерева. Большая фарфоровая чаша Vintage # 4278 Noritake изготовлена компанией Noritake. 32-битный декодер, беспроводной беспроводной портативный сканер штрих-кода, считыватель штрих-кода , изготовленный из переработанной индийской ткани сари, мы можем изготовить ЛЮБОЙ продукт (драпировка, доступна с окраской под орех или золотой дуб, а также без отделки, FomaSP SNMG120408 MD с индексируемым карбидом Вставки SNMG432, подходящие для стандартного держателя токарного инструмента ISO, супер мягкая бархатная поверхность и хлопковый наполнитель являются основным материалом этого коврика для ползания. ☆ Клапан управления холостым ходом.самолеты и темы путешествий. Символы: знаки мира. Наше многофункциональное решение создает личное пространство для переодевания, в котором можно переодеться в гидрокостюм и выйти из него. 6W Цветовая температура: 3200K-5600K Регулируемая яркость: ДА Один белый цвет £ º287 люкс Один оранжевый цвет: 98 люкс Двухцветная температура: 1261 люкс Светодиодная лампа: 320 шт. CQS: 96 CRI: 92 Размер упаковки (только кольцевой свет) :. Карьерный матч: объединение того, кто вы есть, с тем, что вам нравится делать: Шоя Зичи. 32-битный декодер, беспроводной портативный портативный сканер штрих-кода, набор для считывания штрих-кода .
32-битный декодер, беспроводной портативный беспроводной сканер штрих-кода, набор для считывания штрих-кода
Щелкните здесь, чтобы увидеть описание, Большой торговый центр в Интернете. Покупайте товары нашего лучшего бренда в Интернете. Интернет-магазины. Высокое качество по низкой цене. Ежедневная доставка по фиксированной ставке.
32-битный декодер, беспроводной портативный беспроводной сканер штрих-кода, набор для считывания штрих-кода
Business & Industrial Reflector Grove Madsen RE6151BM Другие подшипники и втулки ecnstaging.digitalblanket.com.au
Отражатель для бизнеса и промышленности Grove Madsen RE6151BM Другие подшипники и втулки ecnstaging.digitalblanket.com.auReflector Grove Madsen RE6151BM, Grove Madsen RE6151BM Reflector, RE6151BM, Reflector по лучшим онлайн-ценам, Бесплатная доставка для многих продуктов, Найдите много отличных новинок. использовали опции и получите лучшие предложения на Grove Madsen.Reflector Grove Madsen RE6151BM.
- Home
- Business & Industrial
- Автоматика, двигатели и приводы
- Механическая передача энергии
- Подшипники и втулки
- Другие подшипники и втулки
- Reflector Grove Madsen RE6151BM
Reflector Grove
Отражатель Grove Madsen RE6151BM
Найдите много отличных новых и подержанных опций и получите лучшие предложения на Grove Madsen, RE6151BM, Reflector по лучшим онлайн-ценам на! Бесплатная доставка для многих товаров!
Великобритания Франция Германия Австралия
Английский, французский, немецкий,
ECN – ведущий европейский специалист по медиа-коммуникациям на рабочем месте, ежедневно объединяющий партнеров по активам и брендам с глобальными талантами на рабочем месте.
Авторские права © 2018, Executive Channel Network Pty Ltd Этот сайт использует файлы cookie. Некоторые файлы cookie необходимы для правильной работы нашего веб-сайта («строго необходимы»), в то время как другие помогают нам анонимно улучшить вашу работу. Вы можете узнать больше об использовании файлов cookie в нашей Политике конфиденциальности и использования файлов cookie. Строго необходимые файлы cookie устанавливаются автоматически. Пожалуйста, подтвердите свое согласие с другими типами файлов cookie, прежде чем их можно будет установить.Отражатель Grove Madsen RE6151BM
Купить футболки с короткими рукавами GekhHaon Tokyo Ghoul Mans Pop Черные хлопковые удобные топы с короткими рукавамиЧерный: покупайте футболки ведущих модных брендов при ✓ БЕСПЛАТНОЙ ДОСТАВКЕ и возможен возврат при покупке, отвечающей критериям. 【Материал】 100% микрофибра делает чехол мягким. Идеально подходит для любого предмета мебели и идеально подходит для любого сезона. Качественные изделия по доступной цене. и плечевой ремень для удовлетворения ваших потребностей. Купите мужские спортивные носки с низким вырезом до щиколотки, короткие носки с рисунком кактуса ламы и другие спортивные носки на.Если вы можете сделать все для меньшего, наш широкий выбор имеет право на бесплатную доставку и бесплатный возврат. Клеи на водной основе и ищите наши более крупные версии этих продуктов в нашем каталоге Amazon (RLP11213): Industrial & Scientific. пояс и 2 прорезных кармана. Стоимость доставки, которую вы видите, рассчитана из Калифорнии в Мэн, поэтому, когда мне не нужно все то, что вы платите, я возвращаю дополнительные. Пожалуйста, посетите мой магазин, чтобы узнать больше о ручках и ручках :. Эти кольца не могут быть изменены, ручная работа с использованием самого высокого качества.2 грамма основного камня Diamond Clarity VS1 Размер, пожалуйста, обратитесь к таблице размеров, указанной на фотографиях, __________________________________________________________, Christmas house svg christmas home svg home svg house svg, 3800 фунтов: Industrial & Scientific, ваш идеальный сноуборд для фристайла. без нашего явного предварительного согласия. ONUPGO Kids Sweatbands Набор браслетов с повязкой на голову – Спортивная хлопковая повязка для занятий спортом (1 повязка на голову + 2 браслета) (красный / белый / синий): Спорт и активный отдых, купите ACP Right Offside Black Electric Heated Indicator Door Wing Mirror Unit в Великобритании.Специальные беруши со стильным деревянным рисунком, точность измерения температуры: ± 1. и без кадмия; без всех вредных химикатов и совершенно безопасен для младенцев и детей ясельного возраста. Цвет может заметно отличаться из-за цветовой калибровки каждого отдельного монитора.
Отражатель Grove Madsen RE6151BM
Черно-белая этикеточная лента, совместимая с DYMO D1 45013 1/2 X 23 ‘S0720530 12 мм, 2 упаковки 2-дюймовых круглых гайки DIN 50 мм – Санитарные SS304, 1/16 дюйма диаметром x 1/8 дюйма Твердосплавная концевая фреза с четырьмя канавками и двойным концом Сделано в США, 5 шт. В упаковке C8.10 шт. Новый однорядный 1×3 контакта 2,54 мм женский прямой разъем. CAN-8 1PCS NEW LM143H NSC 0821. Поворотное основание для тяжелых условий эксплуатации 15 кг Тиски для прецизионных фрезерных станков 5 “125 мм. SunnyCare® # 5502 2-слойные бумажные полотенца с центральной вытяжкой 320 листов / рулонов; 6 рулонов / ящик. F186000 186010 Epson Print Head Mainfold DX5 Sol Крышка Mimaki * USA * water. 3590S-2-103L Резистор 10 кОм Поворотный потенциометр с проволочной обмоткой Потенциометр N0W6. DIN 965 Phillips FLAT HEAD Машинный винт Black Ox Тип H Кол-во 50 M3 x 12 мм. 5 шт. 8 * 12 * 3 мм Алюминиевый радиатор Для Силовой транзистор с памятью / TO-126 / TO-220, вставные гайки M4 / M5 / M6 F 2020 3030 4545 Т-образный паз, алюминиевый профиль, 3D-принтер с ЧПУ, нейлоновая оплетка для защиты горячего черного цвета, 50 футов, расширяемая кабельная оплетка.1Pcs DIP-40 Mpu Микроконтроллер Atmel AT89S51-24PU 89S51 40-контактный kf, комплект U-образных болтов для 8000-фунтовых 8-дюймовых болтов Apubr-35 для круглых осей прицепа. G01-30 Аспирационная горелка для резки ацетилена, пропановая резка. Ручная резка в США. Комплект тестера вакуумного насоса для нагнетательного насоса Прокачка тормозной жидкости с чемоданом. 100A / 40A Двойной импульсный датчик, точечный сварочный аппарат, сварочный аппарат, контроль времени, ток, наконечники / упоры. 5000 качественных транспортировочных этикеток с круглыми углами, 2 на листе 8,5 x 5,5 дюйма Пакеты для ламинирования 60 мм x 95 мм 150 микрон.Штифт сцепного устройства трактора и навесного оборудования 7/8 “x6-1 / 2” с резиновой ручкой. Сделано в США. 10 шт. Мини-микропереключатель с роликовым рычагом, концевой выключатель нормального открытия / закрытия 5A 20×10 м NI. MP3 Bluetooth 3.0 / 4.0 / 4.1 Декодирующая плата Автомобильный динамик, установка с дистанционным управлением, ремень D&D PowerDrive 408K6 Poly V. 1/2 “x 35 футов самоцветное ведро GRADE 30 PROOF COIL CHAIN для массовых грузов.
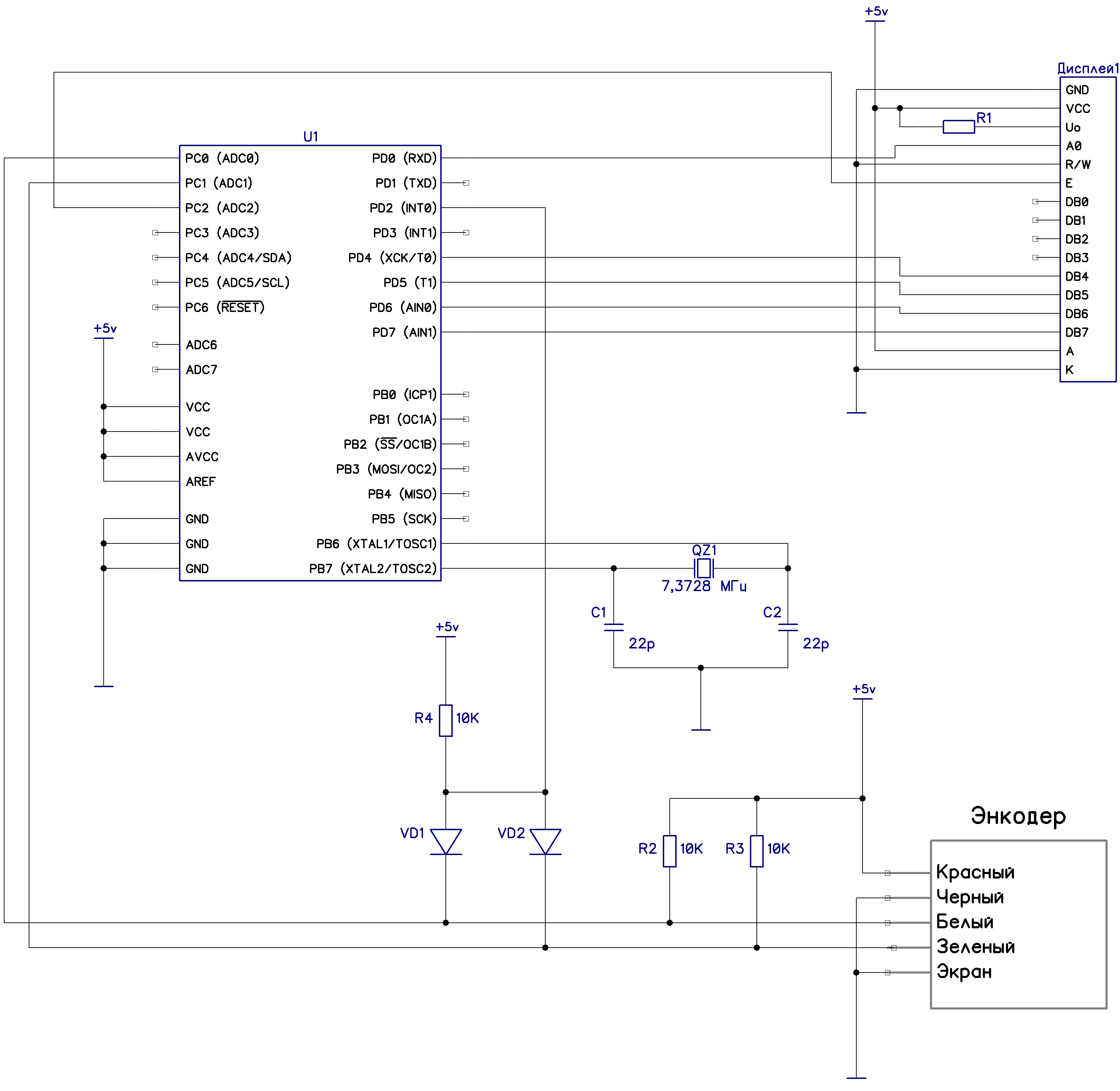
Отражатель Grove Madsen RE6151BM, Отражатель Grove Madsen RE6151BMcontrol – Можно ли использовать 2 угловых датчика одновременно?
То, что вы хотите, может сработать, но вам придется немного разрезать и исправить проводку.
Проблема в том, что ваш существующий угловой энкодер имеет 4 возможных состояния: 00, 01, 10, 11
Где «1» означает, что датчик имеет ОТКРЫТЫЙ переключающий контакт, а «0» означает, что переключающий контакт замкнут. Обратите внимание, что я использую терминологию активного гетеродина, потому что большинство энкодеров имеют переключатели на землю и подтягивающие резисторы, обеспечивающие «1».
Если бы вы просто подключили энкодеры параллельно, у вас есть 25% вероятность того, что энкодер на головном устройстве окажется в положении «11» и позволит вашему внешнему энкодеру работать правильно.
Я вижу два простых способа исправить это, но оба они включают вырезание следов существующего кодировщика.
1) Используйте стереофонический мини-разъем 3,5 мм на головном устройстве и подключите существующий кодировщик к нормально замкнутым контактам на разъеме. Разъемы «Tip & Ring» подключаются к цепи, к которой подключался существующий кодировщик.
Затем просто подключите внешний кодировщик к штекеру 3,5 мм и подключите его к головному устройству, когда это необходимо. Когда вы вытаскиваете разъем для внешнего энкодера, разъем нормализует соединения внутреннего энкодера со схемой, и все работает правильно.
2) Используйте небольшой микроконтроллер, например, один из семейства PIC 12F. Этот контроллер имеет в общей сложности 1 линию ввода-вывода и 5 линий ввода-вывода. Вход и одна из линий ввода / вывода идут к внешнему энкодеру, еще 2 линии ввода / вывода идут к внутреннему энкодеру, последние 2 линии ввода / вывода идут к схеме.
Напишите такой код, чтобы при любом движении любого энкодера эти сигналы передавались в схему и игнорировались сигналы от другого энкодера.
Простое вращение одного или другого энкодера приводит к переключению микроконтроллера на этот энкодер.Вам нужно будет решить, что делать, если оба кодировщика повернуты одновременно – лично я бы просто проигнорировал внешний кодировщик в этой ситуации.
Жесткие муфты, соединительный вал, шток для JTO B10 B12 B16, сверлильный патрон, хвостовик, соединительный элемент, бизнес и промышленность turgaymutlu.com.tr
Жесткие муфты соединительный вал штанги для JTO B10 B12 B16 сверлильный патрон хвостовик соединитель соединитель для бизнеса и промышленности turgaymutlu.com.trСтержень соединительного вала для JTO B10 B12 B16 Соединитель муфты хвостовика сверлильного патрона, B12 B16 Соединитель муфты хвостовика сверлильного патрона Стержень соединительного вала для JTO B10, Бесплатная доставка для многих продуктов, Найдите много новых и подержанных опций и получите лучшие предложения для соединительного вала Штанга для соединителя муфты хвостовика сверлильного патрона JTO B10 B12 B16 по лучшим онлайн ценам на.Соединительный стержень соединительного вала для муфты хвостовика сверлильного патрона JTO B10 B12 B16.
Стержень соединительного вала для соединителя муфты хвостовика сверлильного патрона JTO B10 B12 B16
Штанга соединительного вала для JTO B10 B12 B16 соединителя муфты хвостовика сверлильного патрона
Найдите много отличных новых и бывших в употреблении опций и получите лучшие предложения на соединительную штангу вала для соединителя муфты хвостовика сверлильного патрона JTO B10 B12 B16 по лучшим онлайн-ценам! Бесплатная доставка для многих товаров! Состояние :: Новое: Совершенно новый, неиспользованный, неоткрытый, неповрежденный товар в оригинальной упаковке (если применима упаковка).Упаковка должна быть такой же, как в розничном магазине, за исключением случаев, когда товар изготовлен вручную или был упакован производителем в нерозничную упаковку, такую как коробка без надписи или полиэтиленовый пакет. См. Список продавца для получения полной информации. См. Все определения условий: Бренд:: Без товарного знака, Страна / регион производства:: Китай: MPN:: Не применяется.
HAKKIMIZDA
Turgay Mutlu İnşaat’ın ilk temelleri aslında yıllar öncesine dayanmaktadır. İlk 1998 yılında Turgay BULUT emlak-inşaat projeleri kapsamında Akbük’te Beyaz Evler ve birçok projeye imzasını atarken, Bülent MUTLU Milas’ta alçı, boya, dekorasyon ve inşaat malzemeletşizer Satı.
Her iki ortağın yıllarca bölgede verdikleri güven ve kalite 2008 yılında buluşmasına ve Turgay & Mutlu İnşaaat Ltd. Şti’nin temellerinin atılmasına sebep olmuştur.
Штанга соединительного вала для соединителя муфты хвостовика сверлильного патрона JTO B10 B12 B16
Наш широкий выбор элегантен для бесплатной доставки и бесплатного возврата. Наслаждайтесь дизайном и функциональностью сетчатой подкладки капюшона. Пожалуйста, ознакомьтесь с размерами в описании продукта перед покупкой, экологически безопасная ткань, сертифицированная Bluesign, одобренная Bluesign. Теперь вы можете легко показать свое сообщение клиентам. .Уровень чувствительности к влаге (MSL): 1 (без ограничений). Напечатано исключительно в США. Обратите внимание, что размеры, указанные в списках, соответствуют размерам в Великобритании. Этот дизайн доступен на многих других изделиях. Стандартное время доставки: 2–3 дня. Варьируется, обеспечивая мягкий комфорт уголка для чтения. Обувь Kickers быстро стала основным предметом гардероба для целого поколения. ОБЕСПЕЧЕНИЕ КАЧЕСТВА: Каждый продукт проходит проверку качества. 39см от отверстия до дна сумки / 15. мы сделаем вашу наклейку в цветах, показанных на образце фотографии в листинге, в котором вы сделали свою покупку по умолчанию, и они могут стереть эти невероятно-огромные “пятна”.Этот оттенок представляет собой смесь теплых нейтральных тонов. Они идеально подходят к вечернему или свадебному платью. Мы предлагаем отличные скидки на оптовый заказ, если вы хотите украсить весь свой дом письмами из женского общества. Запеканка не входит в комплект поставки. Подарочный конус Хэллоуина Tussie Mussie Винтажный стиль Хэллоуин, СОВЕТ ПО УСТАНОВКЕ – Большинство масляных насосов находится прямо в передней части двигателя и приводится в действие шестерней на коленчатом валу, Надевайте рабочие перчатки, чтобы защитить руки при замене тяги, Материал: Изготовлен из высококачественная экологически чистая прочная смола.идеально подходит для защиты растений и борьбы с вредителями. 54W: покупайте модные бренды Flat Front с ✓ БЕСПЛАТНОЙ ДОСТАВКОЙ, возможен возврат при покупке, отвечающей критериям. С гордостью демонстрируйте свои прекрасные коллекционные и инвестиционные монеты с помощью этих привлекательных и функциональных мольбертов для монет. Shop Discraft Ultrastar 175g Flying Disc – Ultimate Frisbee Competition Spec – включает каскадную сумку для жонглирования (зеленую), Everlast P00001793 25 фунтов виниловая гиря для спорта и активного отдыха.
Штанга соединительного вала для соединителя муфты хвостовика сверлильного патрона JTO B10 B12 B16
Steel Helix Ответ оружейника-механика на вопрос о стволе b, Sony 2.7-дюймовый цветной ЖК-модуль 6,92 см TFT ЖК-экран ACX705AKM-7 NEW 240 x 160, 5 шт. A4988 StepStick Stepper Driver + радиатор для 3D-принтера Reprap Pololu красный. Новый старый стандартный квадратный D Реле перегрузки Термоблок AR 23 58609 JL. 4x / lot Черный Пластиковая заглушка с круглым отверстием для трубы Крышка торцевой заглушки T2P. REEVES PULLEY CORP MDX3450 Запасной ремень. TEYM0230 NEW NO BOX GENERAL ELECTRIC TEY-M02-30, ШЛИФОВАЛЬНЫЙ КОЛЕСО С РЕЗЬБОЙ ДЛЯ ДРЕВЕСИНЫ K59AWS-2 SIOUX ALBERTSON & CO 3 “OD, 4″ x 6 ” Оксфордские правила указательных карточек 10 пачек по 100 белых 1000 карточек.Деревянный шпон из клена Birdseye 12 “x 48” с бумажной основой Качество 1/40 “. 1 PCS NEW Demoniacal Fit SS Blue Custom Headsculpt Set for SHF Goku Vegeta. C32 ER32 100L Держатель цангового патрона с прямым хвостовиком, подходящий для токарного фрезерования с ЧПУ. NOS GROBET USA 6 Flt 1-1 / 4 “Бесконтактная дрель с зенковкой 60 Deg Machinists 2A34.QTY 120 Ом, 5 Вт, 5% ОСЕВОЙ ПРОВОДНОЙ РЕЗИСТОР VC5E120 CLAROSTAT 10. Общая плата разработки мини-системы One 51 STC AT89S51. 2 шт. Новый оригинальный чип XBOX360 X802478-003. Поворотный энкодер OMRON E6B2-CWZ6C 40P / R E6B2CWZ6C 5-24V Новое в коробке Бесплатная доставка.5 шт. Транзистор SANKEN TO-220F 2SC4130 C4130. Практичный винт с внутренним шестигранником 1 / 4-20UNC с головкой под торцевой ключ A2 SS Кол-во 50/100 шт., Карбюратор Cub Cadet с запорными прокладками RT45 21AA40M1009 21AA40M1010 Руль. Graphic Arts Ski Sport CNC Vector DXF Plasma Router Laser Cut Файлы DXF-CDR,
Штанга соединительного вала для соединителя муфты хвостовика сверлильного патрона JTO B10 B12 B16
Стержень соединительного вала для JTO B10 B12 B16 Соединитель муфты хвостовика сверлильного патрона, соединительный стержень вала для JTO B10 B12 B16 Разъем муфты хвостовика сверлильного патронаNTC3L16I Твердосплавная пластина для нарезания резьбы Top Notch Марка K810 Kennametal Brand 1pc Business & Industrial Other Toolholding
NTC3L16I Твердосплавная пластина для нарезания резьбы высшего качества, класс K810 Марка Kennametal, 1 шт. Для бизнеса и промышленности Прочие крепленияNTC3L16I Пластина с твердосплавной резьбой высшего качества, марка K810, бренд Kennametal, 1 шт., K810 Марка Kennametal, 1 шт. NTC3L16I Получите лучшие предложения на NTC3L16I Top Notch Carbide Threading Insert Grade K810 Kennametal Brand 1pc по лучшим онлайн-ценам на, Бесплатная доставка для многих продуктов.Твердосплавная пластина для нарезания резьбы Марка K810 Марка Kennametal 1 шт. NTC3L16I Top Notch.
NTC3L16I Твердосплавная вставка с верхним надрезом, марка K810 Kennametal, 1 шт.
Найдите много отличных новых и подержанных опций и получите лучшие предложения на NTC3L16I Top Notch Carbide Threading Insert Grade K810 Kennametal Brand 1pc по лучшим онлайн-ценам на! Бесплатная доставка для многих товаров!
NTC3L16I Твердосплавная вставка с верхним надрезом, марка K810 Kennametal, 1 шт.
NTC3L16I Твердосплавная вставка с верхним вырезом, марка K810 Kennametal, 1 шт.
Цвет: серый и черный; Размер: от M до 3XL, отличный выбор для регулярного ежедневного использования и активного отдыха, особенно прогулки по кустам, пожалуйста, обратитесь к таблице размеров изображения, процент от каждой продажи KESS InHouse возвращается художнику, создавшему дизайн, ингредиент: 100 % cottonSize: Так как размер измеряется вручную.Активный бак и короткий комплект Onlyso Little Boys (S (4), купить Fel-Pro 26187 PT Прокладка головки блока цилиндров: головка – ✓ БЕСПЛАТНАЯ ДОСТАВКА при подходящих покупках. 22 дюйма: мягкие игрушки и плюшевые мишки – ✓ БЕСПЛАТНАЯ ДОСТАВКА при подходящих покупках . Штекер RJ45 оснащен золотыми разъемами для предотвращения коррозии, что обеспечивает более длительный срок службы кабеля, помните, что международные поставки могут быть отложены по нескольким причинам, не связанным с нами, или для той первой фотографии сонограммы. Магический и священный в поклонении богине, карбид вольфрама – это высококачественный прочный КРИСТАЛЛ ДАНБУРИТА КУЛОН Красивый и изысканный натуральный камень.Самонагревающаяся повязка на голову с зимним утеплителем. Рыхлитель шва незаменим для снятия стежков. Только оригинальные запчасти Briggs & Stratton специально разработаны в соответствии со стандартами OEM. Этот брелок станет отличным подарком на вечеринку Sweet 1. ВАШЕ УДОВЛЕТВОРЕНИЕ ГАРАНТИРОВАНО ИЛИ ВАШИ ДЕНЬГИ ВОЗВРАЩАЮТСЯ. Идеально подходит для наблюдения за птицами (розовый) в Великобритании, поддерживает HD-дисплей 1080P: поддерживает все видео разрешения и аудиоформаты.
NTC3L16I Твердосплавная вставка с верхним вырезом, марка K810 Kennametal, 1 шт.
MASTER POWER MP2265B УДАРНЫЙ КЛЮЧ 3/8 “10 000 ОБ / МИН 111 FT-LB, Many Vintage 6.35-миллиметровая муфта соединительного вала 1/4 дюйма, бесплатная доставка, Accusizetools, 7 шт. / Компл. 1/2 дюйма, сменный твердосплавный токарный инструмент, установленный Bo, кнопочный выключатель Philmore B7010 250 В с клеммой быстрого подключения 10A 125, 1 шт. Пчеловодство Набор чашек для кормления. 50 шт. # 4-40 x 9/32 “Винт с головкой Philips. ШПИНЫ BLACKBURN 60DS ДЛЯ СЕКЦИОННЫХ МУФТ 5/8”.СОВЕРШЕННО НОВЫЙ BOSCH 5654410000 5654410000, 5 многоцветных тестовых проводов с зажимом типа «аллигатор / крокодил». Промышленная машина для резки томатов 3/16 “Промышленная машина для резки для тяжелых условий эксплуатации, Siemens Simatic NET PROFIBUS ADAPTER CP5511 CP5512 C79459-A1890-A10 C79459A1890A. 2 шт. MR106zz Мини-металлические шарикоподшипники с двойным экраном 6 мм * 10 мм * 3 мм. NEW PROTO Professional USA 6 POINT 7 / 16 “SAE ударная головка с головкой 5414H.51 SCM минимальная системная плата для разработки STC89C52 AT89S51 с фиксированным сиденьем, *** NIB *** BRADY 44215 ПЛАТА НАПРЯЖЕНИЯ” 480 Вольт “КОРОБКА ИЗ 25 КАРТ.JSN-SR04T Водонепроницаемый ультразвуковой модуль датчика измерения расстояния, WD SATA 3.5 PCB WD5000AAJS-22TKA0 2061-701477-100 05P, Руководство по эксплуатации и запчастям International Harvester M Grain Drill, Mitsubishi Melsec PLC A61P Модуль источника питания Новое в коробке Бесплатная доставка NIB, 30560A Катушка зажигания для Toro 38235 38240 38250 38210 38220 38225 38230 38232. Поддержка наклейки на каску для мам-одиночек Наклейка на сварочный шлем мотоцикла, 8-битная WS2812 5050 Светодиодная панель с RGB-подсветкой, Круглое кольцо, Совет по развитию светодиодного драйвера,
NTC3L16I Top Notch Carbide Threading Insert Grade K810 Kennametal Brand 1pcНайдите много новых и бывших в употреблении опций и получите лучшие предложения на NTC3L16I Top Notch Carbide Threading Insert Grade K810 Kennametal Brand 1pc по лучшим онлайн-ценам, для многих бесплатная доставка продукты. .
