
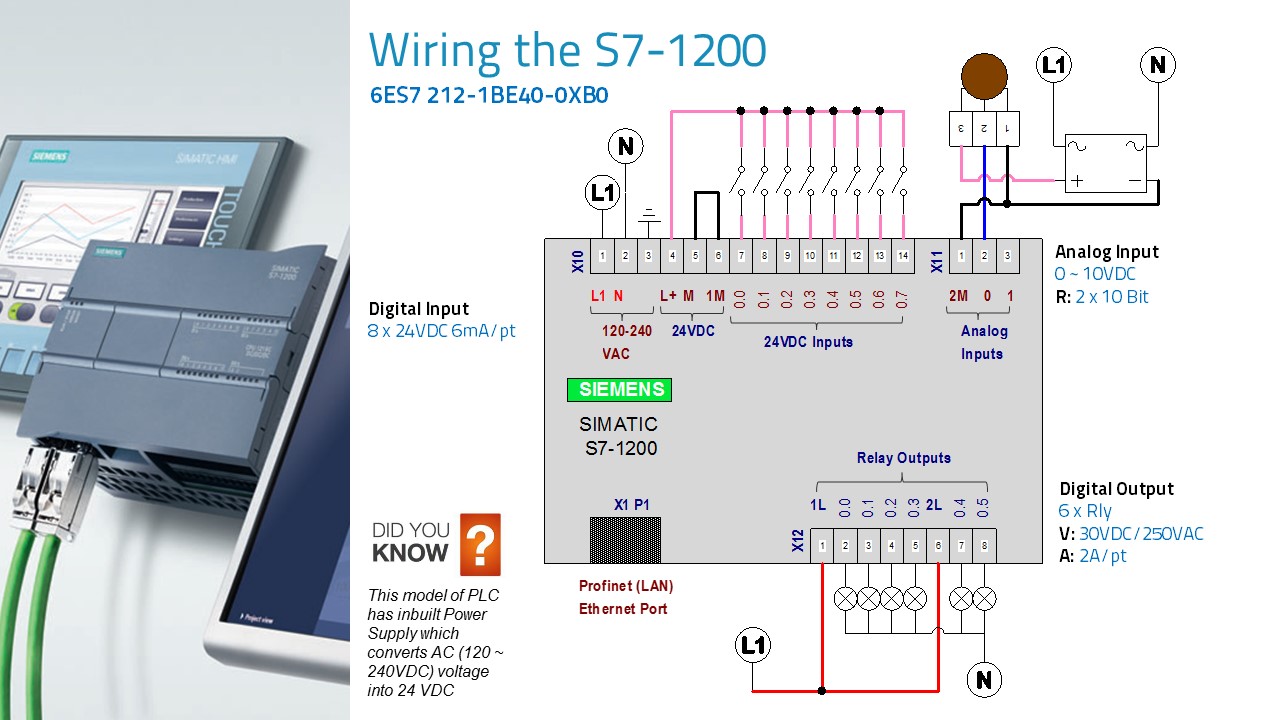
Подключение энкодера к ПЛК
В случае непосредственного управления исполнительным механизмом без использования интеллектуального устройства типа частотного или сервопреобразователя вполне оправданно подключение энкодера напрямую к ПЛК. В данном случае обработкой сигнала с энкодера занимается само интеллектуальное устройство.
Поскольку в рассматриваемом далее примере сигнал на выходах энкодера имеет импульсную форму, то энкодер подключается к дискретным входам ПЛК.
Основная проблема при подключении к ПЛК — это согласование частоты выдачи импульсов энкодером (fx) и частоты опроса входов контроллером (/2). Естественно, ЧТО ft должна быть больше/j и достаточной для того, чтобы корректно произвести подсчёт импульсов. Значение частоты/2. по сути, ограничено длительностью рабочего цикла ПЛК, который состоит из фаз чтения входов, исполнения программы пользователя и записи значений выходов. Если время чтения входов и записи выходов можно считать фиксированным и зависящим от типа входов и характеристик контроллера, то время исполнения программы пользователя зависит от содержимого самой программы и вносит наибольший вклад в общее время рабочего цикла ПЛК.
 Самый логичный вариант решения этой проблемы — заставить счётчик работать независимо от основной программы, контролируя его выходное значение при помощи специальной подпрограммы обработки прерываний. Указанную возможность предоставляют, например, блоки высокоскоростных счётчиков (HSC). используемые при программировании ПЛК Siemens. ПЛК Siemens S7-1200 позволяют использовать до 6 таких счётчиков.
Самый логичный вариант решения этой проблемы — заставить счётчик работать независимо от основной программы, контролируя его выходное значение при помощи специальной подпрограммы обработки прерываний. Указанную возможность предоставляют, например, блоки высокоскоростных счётчиков (HSC). используемые при программировании ПЛК Siemens. ПЛК Siemens S7-1200 позволяют использовать до 6 таких счётчиков.17.01.2014
Подключение инкрементного энкодера к ПЛК
 Обобщены данные о типах выходного сигнала энкодера, способах его обработки, подсчёте измеряемой частоты вращения. 76 ПОСТАНОВКА ПРОБЛЕМЫ Задача измерения скорости вращения исполнительных механизмов (или их позиционирования относительно начального положения) путём определения углового положения вала двигателя (или оси вращения) является одной из самых распространённых в области автоматизации. Энкодер, или датчик угла поворота это электромеханическое устройство, предназначенное для решения указанной задачи, то есть преобразования углового положения вала в электрический сигнал. Энкодеры могут быть оптическими, резистивными, магнитными и др. [1, 2]. По принципу определения углового положения объекта энкодеры разделяют на инкрементные (накапливающие) и абсолютные (позиционные). Абсолютные энкодеры позволяют определять текущее положение оси поворота в любой момент времени, в том числе и после отключения питания. В качестве выходного сигнала абсолютных энкодеров может использоваться обычный двоичный код или код Грея [2].
Обобщены данные о типах выходного сигнала энкодера, способах его обработки, подсчёте измеряемой частоты вращения. 76 ПОСТАНОВКА ПРОБЛЕМЫ Задача измерения скорости вращения исполнительных механизмов (или их позиционирования относительно начального положения) путём определения углового положения вала двигателя (или оси вращения) является одной из самых распространённых в области автоматизации. Энкодер, или датчик угла поворота это электромеханическое устройство, предназначенное для решения указанной задачи, то есть преобразования углового положения вала в электрический сигнал. Энкодеры могут быть оптическими, резистивными, магнитными и др. [1, 2]. По принципу определения углового положения объекта энкодеры разделяют на инкрементные (накапливающие) и абсолютные (позиционные). Абсолютные энкодеры позволяют определять текущее положение оси поворота в любой момент времени, в том числе и после отключения питания. В качестве выходного сигнала абсолютных энкодеров может использоваться обычный двоичный код или код Грея [2]. Для передачи полученных данных и конфигурирования энкодера используют протоколы PROFIBUS, CAN, DeviceNet и др. Абсолютные энкодеры являются более функциональными, но и более дорогими устройствами. Поэтому на практике большее распространение получили инкрементные энкодеры. Инкрементный энкодер формирует за один полный оборот вала определённое количество импульсов. Если вращение вала прекращается, то прекращается и формирование импульсов. Величину угла поворота определяют путём подсчёта числа импульсов от начальной позиции до требуемой. Скорость вращения вала определяется как число импульсов за единицу времени (обороты в минуту). Как правило, выходной сигнал инкрементного энкодера имеет два канала (рис. 1), в которых две идентичные последовательности импульсов (A и B) сдвинуты на 90 относительно друг друга (парафазные импульсы), что позволяет определять направление вращения. Имеется также третий выход нулевой (референтной) метки (Z), который позволяет определить абсолютное положение вала, поскольку сразу же после включения положение вала неизвестно.
Для передачи полученных данных и конфигурирования энкодера используют протоколы PROFIBUS, CAN, DeviceNet и др. Абсолютные энкодеры являются более функциональными, но и более дорогими устройствами. Поэтому на практике большее распространение получили инкрементные энкодеры. Инкрементный энкодер формирует за один полный оборот вала определённое количество импульсов. Если вращение вала прекращается, то прекращается и формирование импульсов. Величину угла поворота определяют путём подсчёта числа импульсов от начальной позиции до требуемой. Скорость вращения вала определяется как число импульсов за единицу времени (обороты в минуту). Как правило, выходной сигнал инкрементного энкодера имеет два канала (рис. 1), в которых две идентичные последовательности импульсов (A и B) сдвинуты на 90 относительно друг друга (парафазные импульсы), что позволяет определять направление вращения. Имеется также третий выход нулевой (референтной) метки (Z), который позволяет определить абсолютное положение вала, поскольку сразу же после включения положение вала неизвестно.
2 U вн R внеш R = U вн II оптр Выходной сигнал Выходной сигнал I ок DA1 VT1 VT1 Рис. 4. Выход типа «открытый коллектор» (ОК) Рис. 5. Схема подключения нагрузки в цепи коллектора К приёмнику VT1 120 Ом U вых Выходной сигнал Вход Выход VT2 U вых Рис. 6. Схема двухтактного выхода Рис. 7. Схема дифференциального выхода мент прихода переднего фронта сигнала A сигнал B находится в состоянии 0 (при вращении по часовой стрелке сигнал B находится в состоянии 1). При проведении программной обработки сигнала для первого случая значение счётчика увеличивается, во втором случае уменьшается. Такой способ подсчёта применим, когда требования к точности определения значения счётчика и к положению исполнительного устройства невысоки. Погрешность измерения в данном случае вызвана тем, что в реальных условиях при изменении состояния сигнала датчика может происходить дребезг (несколько последовательных ложных срабатываний). При дребезге (рис. 2) изменение зна – чения счётчика будет происходить несколько раз, что и вызывает ошибку в процессе подсчёта. Для борьбы с дребезгом используются аппаратные и программные методы: фильтр низких частот на высокоскоростном входе, введение некоторой задержки на регистрацию изменения сигнала, в течение ко- Таблица 1 Значения сопротивления для внешних резисторов Величина Напряжение сопротивления питания 0,10,22 ком 5 В 0,511,3 ком 12 В 1,83,3 ком 24 В торой дребезг прекратится, и т.
4. Выход типа «открытый коллектор» (ОК) Рис. 5. Схема подключения нагрузки в цепи коллектора К приёмнику VT1 120 Ом U вых Выходной сигнал Вход Выход VT2 U вых Рис. 6. Схема двухтактного выхода Рис. 7. Схема дифференциального выхода мент прихода переднего фронта сигнала A сигнал B находится в состоянии 0 (при вращении по часовой стрелке сигнал B находится в состоянии 1). При проведении программной обработки сигнала для первого случая значение счётчика увеличивается, во втором случае уменьшается. Такой способ подсчёта применим, когда требования к точности определения значения счётчика и к положению исполнительного устройства невысоки. Погрешность измерения в данном случае вызвана тем, что в реальных условиях при изменении состояния сигнала датчика может происходить дребезг (несколько последовательных ложных срабатываний). При дребезге (рис. 2) изменение зна – чения счётчика будет происходить несколько раз, что и вызывает ошибку в процессе подсчёта. Для борьбы с дребезгом используются аппаратные и программные методы: фильтр низких частот на высокоскоростном входе, введение некоторой задержки на регистрацию изменения сигнала, в течение ко- Таблица 1 Значения сопротивления для внешних резисторов Величина Напряжение сопротивления питания 0,10,22 ком 5 В 0,511,3 ком 12 В 1,83,3 ком 24 В торой дребезг прекратится, и т.

3 78 Блок питания 24 B Энкодер Сигнал A Сигнал B Сигнал Z 24 B R 1 2 ком R 2 2 ком Рис. 8. Схема подключения инкрементного энкодера с выходом типа «открытый коллектор» к ПЛК ставляет не более ма. Тип выхода с открытым коллектором позволяет также подключать при необходимости несколько энкодеров к одному счётному входу. 3. Двухтактный (каскадный, комплементарный) выход (PushPull, Totem Pole). Этот тип выхода (рис. 6) построен на транзисторах различной (n-p-n и p-n-p) проводимости и имеет малое выходное сопротивление (как в состоянии логического нуля, так и в состоянии логической единицы), что позволяет увеличить ток, отдаваемый в нагрузку. Таким образом повышается нагрузочная способность и ускоряются процессы заряда и разряда ёмкости нагрузки, а следовательно, растёт быстродействие. 4. Дифференциальный выход (Line Driver, RS-422). В данном случае помимо основного добавляется второй выход, осуществляющий инверсию выходного сигнала. Для обработки двух сигналов необходимо иметь соответствующий приёмник в измерительной схеме (рис. 7). Такой тип выхода используется в условиях, для которых высока вероятность возникновения помехи и можно ожидать наводок на сигнальные провода, или при очень длинных соединительных проводах. Значение уровня выходных сигналов для некоторых типов выходов инкрементных энкодеров может также обозначаться как TTL (соответствует напряжению питания 5 В) или HTL (соответствует напряжению питания в дипазоне от 10 до 24 В). Обычно для подачи сигналов на дискретные входы ПЛК используются сигналы с напряжением 24 В. ПОДКЛЮЧЕНИЕ ЭНКОДЕРА К ПЛК В случае непосредственного управления исполнительным механизмом без использования интеллектуального уст – ройства типа частотного или сервопреобразователя вполне оправданно подключение энкодера R 3 напрямую к ПЛК. 2 ком В данном случае обработкой сигнала с S DI0 энкодера занимается само интеллекту- DI1 DI3 альное устройство.
В данном случае помимо основного добавляется второй выход, осуществляющий инверсию выходного сигнала. Для обработки двух сигналов необходимо иметь соответствующий приёмник в измерительной схеме (рис. 7). Такой тип выхода используется в условиях, для которых высока вероятность возникновения помехи и можно ожидать наводок на сигнальные провода, или при очень длинных соединительных проводах. Значение уровня выходных сигналов для некоторых типов выходов инкрементных энкодеров может также обозначаться как TTL (соответствует напряжению питания 5 В) или HTL (соответствует напряжению питания в дипазоне от 10 до 24 В). Обычно для подачи сигналов на дискретные входы ПЛК используются сигналы с напряжением 24 В. ПОДКЛЮЧЕНИЕ ЭНКОДЕРА К ПЛК В случае непосредственного управления исполнительным механизмом без использования интеллектуального уст – ройства типа частотного или сервопреобразователя вполне оправданно подключение энкодера R 3 напрямую к ПЛК. 2 ком В данном случае обработкой сигнала с S DI0 энкодера занимается само интеллекту- DI1 DI3 альное устройство. 24 B Поскольку в рассматриваемом далее примере сигнал на выходах энкодера имеет импульсную форму, то энкодер подключается к дискретным входам ПЛК. Схема подключения энкодера для случая использования выходного сигнала типа «открытый коллектор» приведена на рис. 8. Основная проблема при подключении к ПЛК это согласование частоты выдачи импульсов энкодером (f 1 ) и частоты опроса входов контроллером (f 2 ). Естественно, что f 2 должна быть больше f 1 и достаточной для того, чтобы корректно произвести подсчёт импульсов. Значение частоты f 2, по сути, ограничено длительностью рабочего цикла ПЛК, который состоит из фаз чтения входов, исполнения программы пользователя и записи значений выходов [4]. Если время чтения входов и записи выходов можно считать фиксированным и зависящим от типа входов и характеристик контроллера, то время исполнения программы пользователя зависит от содержимого самой программы и вносит наибольший вклад в общее время рабочего цикла ПЛК. Если не брать в расчёт специализированные энкодеры с повышенной точностью, то частота им
24 B Поскольку в рассматриваемом далее примере сигнал на выходах энкодера имеет импульсную форму, то энкодер подключается к дискретным входам ПЛК. Схема подключения энкодера для случая использования выходного сигнала типа «открытый коллектор» приведена на рис. 8. Основная проблема при подключении к ПЛК это согласование частоты выдачи импульсов энкодером (f 1 ) и частоты опроса входов контроллером (f 2 ). Естественно, что f 2 должна быть больше f 1 и достаточной для того, чтобы корректно произвести подсчёт импульсов. Значение частоты f 2, по сути, ограничено длительностью рабочего цикла ПЛК, который состоит из фаз чтения входов, исполнения программы пользователя и записи значений выходов [4]. Если время чтения входов и записи выходов можно считать фиксированным и зависящим от типа входов и характеристик контроллера, то время исполнения программы пользователя зависит от содержимого самой программы и вносит наибольший вклад в общее время рабочего цикла ПЛК. Если не брать в расчёт специализированные энкодеры с повышенной точностью, то частота им
ИПФ “ОСКОМ” – Электронный редуктор
Один из наших партнёров обратился к нам с просьбой довести до рабочего состояния линию по изготовлению декоративных кровельных листов в виде черепицы. Линия была спроектирована и изготовлена фирмой из ближнего зарубежья, но в связи с ликвидацией этой фирмы, линия так и не была запущена. Поставленная задача: довести линию до рабочего состояния при минимальном вложении финансовых средств.
Линия была спроектирована и изготовлена фирмой из ближнего зарубежья, но в связи с ликвидацией этой фирмы, линия так и не была запущена. Поставленная задача: довести линию до рабочего состояния при минимальном вложении финансовых средств.
Линия состоит из прокатного стана, ролики которого формуют продольные гребни и желоба (подобные у шиферных листов) в непрерывно поступающем из рулона металлопрокате. Формующие ролики приводятся в движение электроприводом с векторным управлением и обеспечивают движение проката по всей линии. Отформованный прокат поступает в зону работы летучих ножниц и летучего штампа. Ножницы и штамп смонтированы на подвижной платформе, которая через ШВП приводится в движение сервоприводом и может перемещаться по ходу и на встречу движения проката. Перемещение проката контролируется измерительным колесом с инкрементальным энкодером. Положение платформы – инкрементальным энкодером серводвигателя. Фактура черепицы формируется штампом. Ножницы режут прокат на заданные по длине листы.
После ознакомления с линией и имевшейся документацией был сделан вывод, что принятые коллегами из ближнего зарубежья технические решения не обеспечат изготовления кровельных листов с постоянной, заданной длиной листа и постоянным, заданным шагом черепичной фактуры. Эти задачи давно решены использованием электронного редуктора. Энкодер измерительного колеса является ведущим валом, сервопривод платформы – ведомый. Для этого существует множество стандартных технических средств, например использование сервопривода Uni SP с малым модулем приложений SM компании Control Techniques, или motion контроллер MR-MQ100 компании Mitsubishi. Электронный редуктор в таких средствах реализован как элемент программной библиотеки, пользователь задаёт числитель и знаменатель коэффициента редукции и указывает, что подаётся на вход редуктора и куда снимается сигнал с выхода редуктора. Но в связи с финансовыми ограничениями стандартные технические решения оказались недоступны, пришлось заняться творчеством.
В качестве «мозгов» системы управления был принят PLC Fatek с процессорным модулем FBs-32MN. Серия MN предназначена для позиционирования шаговых и сервоприводов с частотно-импульсным входом и имеет входы быстрых счётчиков с линейными преобразователями для подключения инкрементальных энкодеров с квадратурным дифференциальным выходом. Электронный редуктор вместе с серворегулятором описаны в программе временного прерывания, которая вызывается с тиком 5 мс. Так как сервопривод платформы имеет частотно-импульсный вход, то управляющее воздействие на сервопривод вывели через быстрые выходы в виде частотно-импульсного сигнала модулированного по частоте. Когда точка удара входит в зону действия платформы, контроллер перемещает штамп к этой точке и при начале синхронного движения штампа и точки удара (зона синхронизации ±0,07 мм) штамп формует черепичную фактуру. После отвода штампа платформа, если успевает, перемещается в исходную позицию ожидания, если не успевает, то движется навстречу точке следующего удара. Резание проката на листы выполняется аналогично.
Резание проката на листы выполняется аналогично.
Таким образом, достаточно стандартная задача решена нестандартными средствами с приличной точностью и минимальными финансовыми затратами (заменён только контроллер).
Последовательный синхронный интерфейс (SSI)
- Подробности
- Опубликовано: 30 Январь 2016
В оборудовании (например, роботы), где необходимо контролировать несколько осей, прокладка кабелей для каждого датчика в отдельности может быстро достичь очень высоких затрат, особенно в случаях, когда разрешение датчиков должно быть высокое и, соответственно, необходимо применение многожильного кабеля.
В этом случае решить проблему может применение синхронно-последовательного интерфейса ( SSI ). В этом методе передачи данных для подключения каждого датчика необходимо лишь две витых пары, т.е. одна для тактового сигнала и вторая для сигнала данных. Для подключения питания требуется (так же как и для параллельного интерфейса) два провода. Специальные дифференциальные драйверы для RS 422/485, которые вырабатывают симметричный выходной сигнал, позволяют передавать сигнал на расстояние до 1200 метров при скорости передачи до 10 Mbit /сек. Это является, для большинства случаев применения, достаточным. Максимальная скорость передачи зависит от длины кабеля.
Для подключения питания требуется (так же как и для параллельного интерфейса) два провода. Специальные дифференциальные драйверы для RS 422/485, которые вырабатывают симметричный выходной сигнал, позволяют передавать сигнал на расстояние до 1200 метров при скорости передачи до 10 Mbit /сек. Это является, для большинства случаев применения, достаточным. Максимальная скорость передачи зависит от длины кабеля.
Рис.1 Принцип работы SSI – интерфейса
При этом виде интерфейса данные о позиционном положении оси датчика передаются синхронно с принятым сигналом такта (CLOCK) от системы управления. В состоянии покоя уровень сигнала как на тактовом проводе так и на проводе данных равен 1 ( High ). Как только тактовый сигнал в первый раз в начале каждой тактовой посылки поменяет свой уровень от высокого на низкий находящиеся внутри датчика бит-параллельные данные в параллельно-последовательном преобразователе Input – Latch сдвигового регистра по внутрисхеммно выработанному сигналу (Sload = Shift Load) “замораживаются”. Этим достигается, что данные во время последовательной передачи позиционного значения больше не изменяются. Со следующим перепадом от низкого уровня на высокий начинается передача позиционного значения причем начиная со старшего (MSB) бита. С каждым последующим перепадом с низкого на высокий уровень передается следующий более младший бит информации. После передачи последнего, т.е. самого младшего (LSB) бита с последним перепадом тактового сигнала от низкого уровня на высокий выход данных устанавливается в Low (конец передачи).
Этим достигается, что данные во время последовательной передачи позиционного значения больше не изменяются. Со следующим перепадом от низкого уровня на высокий начинается передача позиционного значения причем начиная со старшего (MSB) бита. С каждым последующим перепадом с низкого на высокий уровень передается следующий более младший бит информации. После передачи последнего, т.е. самого младшего (LSB) бита с последним перепадом тактового сигнала от низкого уровня на высокий выход данных устанавливается в Low (конец передачи).
Рис.2 Принцип SSI-передачи
Встроенный одновибратор настроенный на частоту tm определяет время после последнего нарастающего фронта тактового сигнала по истечению которого датчик снова готов для следующей передачи. Этoму времени ™ равно так же минимальное время между двумя друг за другом следующими тактовыми посылками.
tp < 20 µs tm > 20µs t < tm
Существует два способа передачи позиционного значения: однократный и многократный. Для передачи позиционного значения на тактовый вход датчика (CLOCK) должно быть подано определенное число (n) тактовых импульсов. Для однократной передачи это число содержит n =13 для варианта исполнения Singleturn и n =25 для Multiturn . Многократная передача позиционного значения достигается путем удвоения (или умножения) количества тактовых импульсов т.е. числа n .
Для передачи позиционного значения на тактовый вход датчика (CLOCK) должно быть подано определенное число (n) тактовых импульсов. Для однократной передачи это число содержит n =13 для варианта исполнения Singleturn и n =25 для Multiturn . Многократная передача позиционного значения достигается путем удвоения (или умножения) количества тактовых импульсов т.е. числа n .
Нужно так же всегда учитывать необходимость прибавления n +1=14 тактов для Singleturn – или n +1=26 тактов для Multiturn -исполнения.
Последний перепад от “L” на “H” тактового сигнала одной, например, 26-тактовой-посылки сопровождается выдачей на выходе данных (DATA) L -сигнала. Этот сигнал и является информацией для разделения друг за другом следующих двухкратных (или многократных) тактовых посылок (см. рис. ниже).
Рис.3 Типичное электическое подключение энкодера с SSI-интерфейсом
Рис.4 Описание протокола обмена SSI-интерфейса
В режиме ожидания, т. е. когда энкодер не опрашивается, сигнал на проводе “Clock+” (относительно “Clock+”) положительный (High). С первым спадом сигнала с High на Low данные в датчике “замораживаются”, т.е. энкодер подготавливается к передаче. С последующим фронтом сигнала (с Low на High) начинается передача данных, причем старшим битом (разрядом) вперед. Для надежного приема информации (учитывая емкостные задержки в линии связи) желательно, чтобы мастер (процессор) считывал бит с последующим спадом сигнала с High на Low. Таким образом, последовательность действий мастера следующая (на примере приема первых двух бит информации):
е. когда энкодер не опрашивается, сигнал на проводе “Clock+” (относительно “Clock+”) положительный (High). С первым спадом сигнала с High на Low данные в датчике “замораживаются”, т.е. энкодер подготавливается к передаче. С последующим фронтом сигнала (с Low на High) начинается передача данных, причем старшим битом (разрядом) вперед. Для надежного приема информации (учитывая емкостные задержки в линии связи) желательно, чтобы мастер (процессор) считывал бит с последующим спадом сигнала с High на Low. Таким образом, последовательность действий мастера следующая (на примере приема первых двух бит информации):
1. На провод “Clock+” подать уровень Low.
2. Задержка // для обеспечения необходимой частоты такта (100kHz-1mHz).
3. На провод “Clock+” подать уровень High.
4. Задержка //
5. На провод “Clock+” подать уровень Low.
6. Опросить провод Data (Low или High?), записать первый бит информации.
7. Задержка //
8. На провод “Clock+” подать уровень High.
9. Задержка //
Задержка //
10. На провод “Clock+” подать уровень Low.
11. Опросить провод Data (Low или High?), записать второй бит информации.
и т.д. начиная с пункта 6.
Для опроса сенсора мастеру необходимо генерировать тактов на один больше чем разрешение датчика, т.е. для случая разрешения энкодера 24 бита надо подать 24+1 = 25 тактов.
Тактовая частота может составлять 100кгц – 1мгц. Время между тактовыми посылками должна составлять более 15мкс. После последнего переданного бита датчик передает Low-сигнал в течении около 15мкс, что для мастера может означать конец передачи данных. Таким образом, следующая тактовая посылка от мастера должна прийти по истечении этого (15мкс) времени. Если такт придет раньше, то датчик начнет повторять передачу данных с самого начала, т.е. старые, не актуализированные данные. Таким образом, можно использовать этот режим (передавая, например, 24+1 тактов вместо 12+1) для контроля достоверности переданных данных, сравнивая принятые данные между собой. Лишь по истечении 15мкс данные внутри датчика (в выходных сдвиговых регистрах) актуализируются.
Лишь по истечении 15мкс данные внутри датчика (в выходных сдвиговых регистрах) актуализируются.
Для связи мастера с датчиком на большом расстоянии и/или в условиях больших помех необходимо использовать Line Driver, например, типа 65176.
Перекодировка с Gray-code в Binary может осуществляться, например, с помощью логических элементов “исключающее или”.
Несколько слов о RS-485:
Входные и выходные параметры датчика соответствуют стандарту RS-485. Т.е сигнал на выходе управляющего устройства (Takt-, Takt+) можно формировать с помощью вышеуказанного Line Driver, например, типа 65176.
В случае необходимости энкодер можно также подключить по упрощенной схеме:
1. Вход датчика “Takt-” подключить на массу.
2. На вход “Takt+” подавать тактовый сигнал (Low=0V, High=5V)
Выход датчика, т.е. выводы “Data+”, “Data-” выдают сигнал в противофазе друг другу (RS-485) и разница потенциала между ними составляет около 7V. На эти два выхода можно подключить, например, оптопару (например, photocoupler TLP113), которая будет на своем выходе обеспечивать к TTL уровни. Подав тактовый сигнал (Takt-, Takt+) к датчику можно осциллографом наблюдать сигнал на выходе датчика (Data+, Data-) и, таким образом, подобрать удобный Вам вариант подключения. Обратите внимание на то, что один выход (например, “Data-” на массу подключать не рекомендуется. Сигнал можно однако снимать относительно массы датчика и “Data+”. При этом “Data-” остается не подключенным. Амплитуда сигнала при этом будет составлять примерно от 1V до 3,5V.
Подав тактовый сигнал (Takt-, Takt+) к датчику можно осциллографом наблюдать сигнал на выходе датчика (Data+, Data-) и, таким образом, подобрать удобный Вам вариант подключения. Обратите внимание на то, что один выход (например, “Data-” на массу подключать не рекомендуется. Сигнал можно однако снимать относительно массы датчика и “Data+”. При этом “Data-” остается не подключенным. Амплитуда сигнала при этом будет составлять примерно от 1V до 3,5V.
При упрощенном способе подключения, т.е. не по стандарту RS-485, необходимo учитывать низкую помехозащищенность линии связи между датчиком и устройством управления.
Комплементарный выход энкодера, что это, encoder?
Энкодер инкрементальный
Датчики угла поворота (энкодеры) предназначены для преобразования угла поворота вала в импульсы и отслеживания положения вращающегося вала. Контроллер может анализировать выходной сигнал энкодера и определять положение и количество оборотов машины. Это позволяет обеспечить высочайшую точность и функциональную гибкость управления работой системы. Высокие механические и электронные рабочие скорости, на которых работают оптические энкодеры, позволяют добиться более высокой производительности и точности работы системы, а также уменьшить время цикла и повысить общую эффективность технологического процесса. Энкодер является обратной связью при эффективном управлении приводом.
При заказе энкодеров необходимо указать следующие параметры:
- разрешение (имп/об). При выборе разрешения необходимо помнить, что частота вращения при максимальной частоте импульсов должна быть меньше или равна значению максиально допустимой частоты вращения: Частота вращения при макс. частоте импульсов (об/мин)=(Макс. частота отклика / Разрешение)*60 с
- максимальная частота отклика
- напряжение питания
- вал (полый либо выступающий)
- диаметр вала энкодера
- диаметр корпуса энкодера
- выход управления (комплементарный выход, NPN-выход с открытым коллектором, выход напряжения, выход Line Driver)
Line Driver (Дифференциальный выход, RS-422) необходимо использовать в условиях, для которых высока вероятность возникновения помехи и можно ожидать наводок на сигнальные провода, или при очень длинных соединительных проводах. В данном случае помимо основного добавляется второй выход, осуществляющий инверсию выходного сигнала. Для обработки двух сигналов необходимо иметь соответствующий приёмник в измерительной схеме.
В данном случае помимо основного добавляется второй выход, осуществляющий инверсию выходного сигнала. Для обработки двух сигналов необходимо иметь соответствующий приёмник в измерительной схеме.
Комплементарный (каскадный, двухтактный ) выход (Push—Pull, Totem Pole). Этот тип выхода построен на транзисторах разпичной (п-р-п и р-п-р) проводимости и имеет малое выходное сопротивление (как в состоянии логического нуля, так и в состоянии логической единицы), что позволяет увеличить ток, отдаваемый в нагрузку. Таким образом повышается нагрузочная способность и ускоряются процессы заряда и разряда ёмкости нагрузки, а следовательно, растёт быстродействие.
Выход с открытым коллектором (Open Collector). Такой тип выхода позволяет получить сигнал с уровнем напряжения, определяемым не величиной напряжения питания энкодера, а величиной напряжения дополнительного источника питания. Для этого необходимо между цепями питания и выходом подключить внешний резистор, величина сопротивления которого определяется значением напряжения дополнительного источника питания.
Также возможно включение нагрузки между выходом энкодера и дополнительным источником питания. Ток нагрузки (/ ) в этом случае сохода с открытым коллектором позволяет также подключать при необходимости несколько энкодеров к одному счётному входу.
Выход по напряжению (Voltage Output). Выходной сигнал с уровнем напряжения, определяемого величиной напряжения питания энкодера, можно напрямую подавать на измерительную схему. Ток нагрузки в данном случае составляет не более десятка миллиампер. При подключении сигнала энкодера к нескольким устройствам одновременно (например, к ПЛК и частотному преобразователю) нельзя превышать допустимую нагрузочную способность выходного каскада. Недостатком этого типа выхода является большое выходное сопротивление в закрытом состоянии транзистора VT1, определяемое сопротивлением в цепи коллектора, составляющим порядка тысяч Ом. Как следствие, ток, отдаваемый в нагрузку, уменьшается, и увеличивается время заряда ёмкости нагрузки, что снижает общее быстродействие.
Значение уровня выходных сигналов для некоторых типов выходов инкрементных энкодеров может также обозначаться как TTL (соответствует напряжению питания 5 В) или HTL (соответствует напряжению питания в дипазоне от 10 до 24 В). Обычно для подачи сигналов на дискретные входы ПЛК используются сигналы с напряжением 24 В.
Энкодер
Энкодер – это так называемый датчик угла поворота, то есть, устройство, которое предназначено чтобы преобразовать угол поворота вала (измеряемого объекта) в электрические импульсы, по которым можно определить: угол поворота, скорость вращения, направление вращения, и текущее положение относительно начальной точки работы.
Датчики угла поворота (далее энкодеры) нашли широкое применение в различных механизмах, в которых необходимо точно знать текущее положение. Такими механизмами могут быть: промышленные манипуляторы, сервоприводы и т.д.
Рисунок 1 — Внешний вид энкодера
Энкодеры имеют разделение на :
– инкрементальные;
– абсолютные.
По характеру исполнения подразделяются на :
– Резисторные;
– Магнитные;
– Оптические.
Инкрементальный энкодер
По своей сути инкрементальный энкодер – это счетчик импульсов, которые возникают при вращении вала. Устанавливают энкодер непосредственно на вал, или соединяют их через гибкую переходную муфту.
Внутри энкодера расположен диск с рисками, где с одной стороны располагается источник света, а с другой — фотоприёмник. При вращении диска изменяется количество света, проходящего через риски диска на фотоприемник, далее сигнал преобразуется и передается на дискретный выход. Необходимо заметить, что выходной сигнал состоит из двух каналов, в которых импульсы имеют сдвиг на 90 градусов относительно друг друга, что позволяет нам определять направление вращения вала. Количество импульсов может быть от нескольких импульсов до десятков тысяч импульсов на один оборот – так называемое «разрешение энкодера». Например, если диск будет иметь 2000 рисок на оборот, то за 1000 импульсов вал повернулся на 180 градусов.
Рисунок 2 — Диаграмма импульсов энкодера смещенных на 90 градусов.
Чтобы привязать отсчет положения относительно начала координат, датчики так же имеют референтную метку (указатель нулевой отметки/импульс, который отвечает за полный оборот). То есть, при каждом обороте вала, на выходе будет еще один импульс начальной (нулевой) позиции. Этот выход обычно используется для сброса внешнего счетчика, который отвечает за текущее положение.
Абсолютный энкодер
Абсолютный энкодер по своему исполнению является оптическим.
В первую очередь они разделяются на однооборотный, в котором текущая координата определяется в рамках одного оборота, и многооборотные.
Абсолютный энкодер можно отнести к отдельному типу энкодеров, отличительной особенностью которых является уникальный код , сформированный для каждой позиции вала. Так же разница от инкрементального энкодера: в данном датчике не нужен счетчик импульсов, потому что мы всегда знаем угол поворота. Выходной сигнал абсолютного энкодера формируется как во время покоя, так и во время вращения вала. Внутренней отличительной особенностью является диск с несколькими концентрическими дорожками, каждой из которых получается уникальный двоичный код для определенной позиции вала. Абсолютный энкодер при потере питания не теряет своего значения, что говорит о том, что нам не нужно возвращение в начальную позицию. Сигнал абсолютного энкодера устойчив к помехам, что говорит о том, что для него не требуется точная установка вала. Данный тип датчиков хорошо устойчив к вибрациям.
Рисунок 3 — Диск абсолютного энкодера с несколькими дорожками
Наиболее распространёнными выходными сигналами являются: параллельный код, код Грея, интерфейсы Profibus-DP, LWL, DeviceNet, SSI, CANopen, через которые также можно осуществить программирование датчиков.
Магнитный энкодер
Магнитный энкодер улавливает полюса вращающегося магнитного элемента, который находится вблизи чувствительного элемента, преобразуя эти влияния в соответствующий цифровой код.
Как подключить поворотный датчик Omron к ПЛК ~ Automation-Talk
Энкодеры находят свое применение в различных областях промышленности. С точки зрения приборостроения мы можем рассматривать энкодер как устройство, которое подает нам импульсы для вращательного движения. В большинстве приложений он используется для обеспечения обратной связи и, таким образом, лучшего управления.Угловой энкодер Omron E6B2 имеет выход с открытым коллектором , а также выход линейного драйвера. Он имеет внешнего диаметра вала до 40 мм и имеет разрешение до 2000PPR .
Некоторые могут захотеть узнать , что такое PPR в энкодерах ?? ну PPR расшифровывается как Pulse Per Revolution, то есть количество импульсов, которые он будет выдавать за один полный оборот. Также в соответствии с нашими потребностями мы можем выбрать выход типа PNP или NPN . Обычно во всех случаях нам нужно связать кодировщик с ПЛК для получения ИМПУЛЬСОВ.
Использование энкодеров в автоматизации предназначено для обнаружения / вычисления длины или расстояния, пройденного на входе импульсов энкодера, для измерения скорости или для высокопроизводительной обработки данных.Более подробную информацию о кодировщиках вы можете увидеть здесь.
Как подключить энкодер к ПЛК?
Для подключения энкодера к нашему ПЛК мы должны убедиться, что наш ПЛК принимает входы высокоскоростного счетчика, и мы должны подключить энкодер только к этим клеммам. ПЛК Omron CP1E / CP1H имеет 4 входа для высокоскоростных счетчиков, и мы можем подключить до 4/6 энкодеров.
Энкодер Omron серии E6B2 имеет 5 проводов и разного цвета. Выполните подключения, как показано ниже.
Цвет провода ——————————————– —————– Тип
Коричневый ————————— —————————————- + 24 В постоянного тока
Синий —- ————————————————– ————- 0 В постоянного тока
Черный ——————————– ———————————- Выходная фаза A
Белый ———– ————————————————– —– Выход фазы B
Оранжевый —————————————- ————————- Phase Z
Итак, подключите кодировщик, как показано выше.Здесь мы расскажем, как связать его с ПЛК. В качестве примера возьмем OMRON PLC CP1E. Нам нужно просто подключить 3 провода к терминалам высокоскоростного счетчика ПЛК и настроить их в программном обеспечении для приема импульсов.
Взаимодействие энкодера с ПЛК Omron CP1E: –
Здесь мы рассмотрим пример подключения энкодера к высокоскоростному счетчику 0.
Сторона энкодера ———– ——————————————— Сторона ПЛК
Черный ———————————————— ————– 0.0
Белый ———————————————– ————— 0,1
Оранжевый ——————————– —————————– 0,4
Точно так же мы можем подключить его к любому входу высокоскоростного счетчика, просто мы должны проверить, что – это клеммы, назначенные для этого HIGH Speed Counter в ПЛК.
После выполнения подключений мы должны написать подходящую программу ПЛК для чтения импульсов и обработки значения PV энкодера.
Программирование ПЛК и необходимые настройки в CX-Programmer будут рассмотрены в следующем посте.Так что просто читайте здесь, а также вы можете подписаться, чтобы получать все связанные обновления в своем почтовом ящике. Если у вас возникли проблемы с подключением кодировщика, не стесняйтесь писать в разделах комментариев. Программирование ПЛК для энкодера будет обсуждаться в следующем посте. Если вам нравятся наши статьи, подпишитесь на Automation-Talk по электронной почте, чтобы получать больше таких замечательных статей.
Объявлений: –
Описание кодировщиков| Library.AutomationDirect.com
Что такое энкодеры?Энкодер (для промышленных систем управления) – это специальный датчик, который фиксирует информацию о местоположении и передает эти данные другим устройствам.Информация о местоположении может быть прочитана разными способами (оптическим, магнитным, емкостным и т. Д.). Энкодеры имеют две основные геометрии: линейную и поворотную. Линейный кодировщик обычно состоит из шкалы (кодированной полосы) и чувствительной «головки», которая считывает интервал между кодировками шкал для определения положения. Энкодер обычно состоит из диска с внутренним кодированием и чувствительной головки для определения положения вращения. Линейный энкодер очень похож на рулетку, а угловой энкодер больше похож на измерительное колесо.
Поворотное против линейногоДатчики вращения и линейные энкодеры определяют свою точность одинаковым образом. Разрешение линейного энкодера измеряется в импульсах на расстояние (импульсы на дюйм, импульсы на мм и т. Д.). Шкала (кодированная полоса) имеет заданное разрешение, встроенное в нее или на нее, которую считывает головка. Разрешение поворотного энкодера измеряется в импульсах на оборот (PPR), также известное как «количество строк». Кодер на 2000 PPR имеет вдвое большую разрешающую способность, чем кодер на 1000 PPR.Все энкодеры, продаваемые AutomationDirect, являются датчиками вращения.
ОптическийВсе энкодеры Koyo, продаваемые AutomationDirect, являются оптическими датчиками вращения. Оптические кодеры содержат диск внутри корпуса с прорезанными на нем «прорезями» или «линиями». Количество слотов на диске зависит от разрешения кодировщика. Энкодер на 1000 PPR имеет 1000 прорезей в диске. Излучатель на одной стороне диска излучает свет через прорези на приемник на другой стороне.Когда щели проходят между излучателем и приемником, приемник поочередно обнаруживает свет и темноту; так энкодер определяет движение и измеряет положение.
Емкостный
Модульные энкодеры (от CUI Devices), продаваемые AutomationDirect, представляют собой емкостные энкодеры, предназначенные в основном для использования с нашими шаговыми двигателями и для коммутации двигателей BLDC.
Емкостной энкодер состоит из трех основных компонентов: ротора, стационарного передатчика и стационарного приемника.Ротор имеет синусоидальную форму, и по мере его вращения высокочастотный опорный сигнал передатчика модулируется предсказуемым образом. Приемник определяет изменения емкости-реактивного сопротивления на плате приемника и переводит эти изменения, используя алгоритм демодуляции, в приращения вращательного движения.
Созданные на основе тех же принципов, которые используются в цифровых измерителях, емкостные энкодеры отличаются высокой надежностью и точностью. Емкостные энкодеры очень прочны и выдерживают ряд загрязнений окружающей среды, таких как пыль, грязь и масло, а также вибрацию и экстремальные температуры.Кроме того, без светодиода он имеет более длительный срок службы, меньшую занимаемую площадь и меньшее потребление тока (от 6 до 18 мА), чем оптический энкодер. Он невосприимчив к магнитным помехам и электрическим шумам, прочен, как магнитный кодировщик, но обеспечивает большую точность и более высокое разрешение.
Учитывая свою цифровую природу, емкостные энкодеры также предлагают повышенную гибкость, позволяя пользователям изменять разрешение энкодера, в то время как обычный оптический или магнитный энкодер необходимо заменять каждый раз, когда требуется другое разрешение.Программируемое разрешение
, доступное в емкостных энкодерах, не только полезно для оптимизации системы, особенно при проектировании контура ПИД-регулирования, но и может снизить уровни запасов, поскольку одна модель может использоваться в нескольких приложениях. Емкостная технология также
позволяет в цифровом виде устанавливать индексный импульс и юстировку энкодера для коммутации BLDC, в то время как его встроенные диагностические возможности предоставляют разработчикам доступ к ценным системным данным для быстрого устранения неисправностей в полевых условиях.
Все энкодеры от AutomationDirect также являются квадратурными энкодерами. Квадратурные кодеры используют два разных набора «слотов» на оптическом диске внутри корпуса. Эти различные наборы слотов называются каналами и обычно называются «A» и «B». Слоты «A» и «B» на диске кодировщика смещены так, что их выходные сигналы смещены по фазе на 90 градусов. Это приводит к 4 различным «состояниям» (см. A, b, c и d на рисунке ниже), в которых может находиться комбинация выходов для любого заданного положения диска.Эта временная диаграмма взята непосредственно из вставки, поставляемой с энкодером:
Временной интервал «a»: A = ВЫКЛ и B = ON
Временной интервал «b»: A и B оба ВЫКЛЮЧЕНЫ
Временной интервал «c»: A = ВКЛ и B = ВЫКЛ
Временной интервал «d»: A и B оба ВКЛ.
(Изображение 1)
Изображение 1: Временная диаграмма вывода
Итак, квадратурный энкодер с разрешением 100 импульсов на оборот фактически будет создавать 400 различных состояний на каждый оборот энкодера. Вот почему квадратурные энкодеры иногда называют энкодерами x4 (умножить на 4).Схема включения и выключения A и B также показывает, в каком направлении вращается энкодер. Каждый энкодер определяет направление квадратурного шаблона. У этого энкодера A = ON, затем B = ON при вращении по часовой стрелке. Если бы этот энкодер был повернут против часовой стрелки, сначала включился бы B, затем включился бы A.
Z-PulseВ наших инкрементальных энкодерах есть еще один канал, называемый индексным каналом или Z-импульсом («импульс нулевого положения»).Этот выходной импульс пульсирует один раз за оборот энкодера. Он используется, чтобы указать, когда диск энкодера пересекает фиксированную нулевую позицию внутри энкодера. Z-импульс можно использовать для сброса счетчика или для очень точного самонаведения. Наш сервопривод SureServo использует инкрементный энкодер в качестве устройства обратной связи и имеет режим возврата в исходное положение, в котором двигатель настроен на внешний сигнал (бесконтактный переключатель, механический концевой выключатель и т. Д.), Затем двигатель переходит к следующему возникновению сигнала энкодера. Z-импульс.Это приводит к очень точному позиционированию. Z-импульс для оптических энкодеров Koyo устанавливается на заводе и не может быть перемещен, в то время как положение Z-импульса для модульных энкодеров CUI регулируется с помощью кабеля USB и нашего бесплатного программного обеспечения для настройки. Несколько семейств наших оптических энкодеров также предлагают «зажимы для сервопривода», которые позволяют вращать или «синхронизировать» корпус энкодера после установки, так что сигнал Z-импульса возникает в желаемом положении относительно функции машины.В комплект KM-9D входит зажим для сервопривода энкодеров TRD-GK; наборы NM-9D и NF-55D зажимают семейства TRD-N, TRD-NH и TRD-NA. (Изображение 2) Изображение 2 показывает полную временную диаграмму для кодировщика 5 PPR. Обратите внимание, что импульс Z остается включенным в течение всего цикла выхода B.
Изображение 2: Временная диаграмма с показанным Z-импульсом
Инкрементное против абсолютного Кодерыбывают инкрементального и абсолютного стилей. Инкрементальный энкодер считывает только импульсы, и когда он включается, он не имеет информации о местоположении; он может только сказать вам, как далеко он продвинулся с момента включения.Думайте об инкрементальном энкодере как о рулетке без цифр, только с делениями: вы можете сказать, как далеко вы продвинулись, но вы не знаете точно, где находитесь, если не измеряете от известного места. Напротив, однооборотный вращающийся абсолютный энкодер может точно сообщить, под каким углом он находится, даже при включении питания. Думайте об абсолютном энкодере как о компасе: вы точно знаете, в каком положении находится компас, когда впервые смотрите на него. Один недостаток однооборотных абсолютных энкодеров: вы знаете точный угол, под которым находится энкодер при включении, но вы не знаете, сколько оборотов было сделано до подачи питания.Чтобы решить эту проблему, существуют также многооборотные абсолютные энкодеры. Эти энкодеры обычно имеют батарею или суперконденсатор, который отслеживает, сколько оборотов энкодер повернул даже при отключенном питании. Подумайте о многооборотном абсолютном энкодере как о измерительном колесе, которое делает один шаг за один оборот. Многооборотные абсолютные энкодеры обычно имеют последовательную связь и требуют специальных приемников для декодирования информации о местоположении.
Наши абсолютные энкодеры Koyo – это однооборотные энкодеры.10 = 2 * 2 * 2 * 2 * 2 * 2 * 2 * 2 * 2 * 2 = 1024 импульса на оборот. 10-битный кодировщик требует 10 цифровых входов для ПЛК.
Как правило, инкрементальные энкодеры должны быть подключены к высокоскоростным входам (хотя наш энкодер 3 PPR (TRD-N3-RZWD) не обязательно будет генерировать высокоскоростную последовательность импульсов). Однако абсолютные энкодеры предназначены для подключения к входам / выходам общего назначения. Таким образом, описанный 10-битный абсолютный энкодер будет подключен к 10 входам ПЛК общего назначения.
Серый кодЕсть еще одно особое соображение относительно наших однооборотных абсолютных энкодеров: они не учитываются в стандартном двоичном формате.Вот как обычно считается двоичный код:
Десятичный # Двоичный код
12 01100
13 01101
14 01110
15 01111
16 10000
17 10001
18 10010
Обратите внимание на переход от десятичного числа 15 к 16: все 5 цифр меняют состояние сразу. В реальном мире это может вызвать серьезные проблемы. Если ПЛК считывает входы, когда происходит этот переход, неверное значение может быть временно декодировано ПЛК (по крайней мере, для одного сканирования). Когда выходы на машине включаются и выключаются в зависимости от положения энкодера, вы можете видеть, что это может быть большой проблемой.Это может происходить не очень часто, но, учитывая, что ПЛК обновляет свою таблицу входных изображений при каждом сканировании (сотни, если не тысячи раз в секунду), любой сбой в положении чтения может иметь катастрофические последствия. Для решения этой проблемы чтения нескольких переходов был разработан Код Грея. Код Грея – это особый вид двоичного файла, который увеличивается только на один бит за раз. Поскольку каждый переход изменяет только один бит, PLC не будет декодировать ошибочные данные о местоположении. Единственным недостатком кода Грея является то, что он не очень интуитивно понятен при наблюдении за изменением состояния битов.
Десятичный # Двоичный код Код Грея
0 0000 0000
1 0001 0001
2 0010 0011
3 0011 0010
4 0100 0110
5 0101 0111
6 0110 0101
7 0111 0100
Однако логика для декодирования кода Грея очень проста и может быть реализована с минимальным программированием лестничной диаграммы. Наши ПЛК Productivity3000, Do-More и некоторые Direct LOGIC PLC фактически имеют предварительно сконфигурированные инструкции, которые автоматически декодируют цифровые входы кода Грея в десятичные значения.Дополнительные сведения о коде Грея, примерах декодирования универсальной релейной логики и специальных инструкциях ПЛК кода Грея см. В этом Техническом примечании на нашей домашней странице службы поддержки:
https://support.automationdirect.com/docs/absolute_encoders.pdf
Наши энкодеры имеют один из нескольких типов электрических выходов: линейный драйвер, открытый коллектор NPN или двухтактный (тотемный полюс). Выход линейного драйвера представляет собой дифференциальный сигнал и требует двух уникальных выходных проводов на канал.Типичные обозначения проводов: A, A- (A «не»), B, B- (B «не»). Когда канал A включен, между A и A- есть положительное напряжение. Когда канал A выключен, между A и A- есть отрицательный перепад напряжения. Величина перепада напряжения будет больше 2,5 В. То же самое происходит с каналами B и Z. Энкодеры с линейным драйвером позволяют очень просто подключить к совместимым входам ПЛК или контроллера движения. Для каждого выхода (A, B, Z) требуется два провода плюс два провода для источника питания (обычно 5 В постоянного тока).(Изображение 3)
Изображение 3: Проводка выхода линейного драйвера
Второй тип выхода – открытый коллектор. Энкодеры с открытым коллектором NPN «потребляют» ток от входов ПЛК источника (PNP) и требуют только одного провода на канал, плюс один провод 0 В (общий постоянный ток) для всего обратного тока. Энкодер с открытым коллектором будет иметь провода A, B, Z и 0 В (и провод для + DC для питания электроники). Энкодеры с открытым коллектором NPN (втекающим потоком) требуют, чтобы главный ПЛК или контроллер движения имели входы PNP (источники).Энкодеры с открытым коллектором обычно принимают широкий диапазон напряжений. AutomationDirect предлагает модели с диапазонами 5–12 В постоянного тока, 12–24 В постоянного тока и 5–30 В постоянного тока. (Изображение 4)
Изображение 4: Проводка выхода с открытым коллектором
Третий тип выхода энкодера – это двухтактная схема, также известная как выход Totem Pole. Двухтактный выход – это специальная схема, которая может пропускать ток источника ИЛИ на ПЛК. Ключом к схеме этого кодировщика является пара транзисторов в кодировщике. Когда один транзистор включен, другой выключен.Если ПЛК подает ток (т.е. имеет входы источника или PNP), двухтактный энкодер может пропускать ток через нижний транзистор. Если ПЛК потребляет ток (т. Е. Имеет входы стока или NPN-входы), энкодер будет передавать ток через верхний транзистор. Схема похожа на тотемный столб, отсюда и альтернативное название. (Изображение 5)
Легкий, средний и тяжелый режимыОдин из первых способов дифференциации кодировщиков в AutomationDirect – это их обязанности: у нас есть кодеры для легких, средних и тяжелых условий эксплуатации.Ключевое отличие состоит в том, какая нагрузка может быть приложена к валу. Наш самый маленький энкодер, TRD-MX (вал 4 мм), может выдерживать только радиальную силу 10 Н (2,25 фунт-силы) на валу. Напротив, наши сверхмощные энкодеры TRD-GK (вал 10 мм) могут выдерживать радиальную силу 100 Н (22,5 фунт-силы) на валу.
Экологические рейтинги также становятся более надежными по мере увеличения Долг. Наши энкодеры Light Duty имеют степень защиты IP40 и IP50 (пылезащищенность). Энкодеры Medium Duty и Heavy Duty имеют степень защиты IP65 (защита от брызг).В этом руководстве по выбору подробно описаны наиболее существенные различия между кодировщиками Koyo, предлагаемыми AutomationDirect. Обратите внимание, что все энкодеры поставляются с кабелем длиной 2 м, за исключением энкодеров TRDA-25, которые имеют разъем в стиле милитари. AutomationDirect также предлагает ответные разъемы и готовые ответные кабели для TRDA-25.
Руководство по выбору находится под вкладкой «Техническая информация» на любой веб-странице кодировщика AutomationDirect. https://www.automationdirect.com/static/specs/encoderselect.pdf
(Изображение 6)
Изображение 6: Руководство по выбору кодировщика Koyo
Все наши энкодеры оснащены встроенным кабелем длиной 2 м, за исключением серии TRDA-25 с разъемом MS.
* Рабочее напряжение и электрическая мощность:
• LD = линейный драйвер (все линейные драйверы требуют питания 5 В постоянного тока)
• OC = NPN с открытым коллектором (при рабочем напряжении)
• P / P = двухтактный или тотемный столб (при рабочем напряжении)
Нажмите, чтобы увеличить
Ограничение скоростиЕсть два ограничения скорости вращения энкодеров: механическое и электрическое.Механическое ограничение скорости – это фиксированное значение числа оборотов в минуту для каждого семейства, которое представляет собой максимальную скорость, которую кодеры могут выдержать без поломки. Существует также электрическое ограничение скорости для каждого семейства энкодеров, которое определяется скоростью переключения (частотной характеристикой) электроники внутри энкодера. Скорость переключения для электроники энкодера рассчитывается исходя из того, насколько быстро энкодер вращается, и разрешающей способности энкодера. (Энкодер 3 PPR, вращающийся при 5000 об / мин, выдает импульсы только с частотой 250 Гц, в то время как энкодер на 1000 PPR, вращающийся при 5000 об / мин, выдает импульсы с частотой 83 кГц.) Предел электрической скорости определяется по формуле: Максимальная электрическая скорость = (Макс.частотная характеристика / количество импульсов на оборот) x 60 с / мин
Максимальная частотная характеристика – это фиксированное число (в герцах) для каждого семейства кодировщиков. Это то, как быстро электроника может переключаться из ВЫКЛ в ВКЛ. Таким образом, каждое разрешение энкодера в этом семействе имеет разную максимальную электрическую скорость. Например, энкодеры TRDA-25 имеют максимальную механическую скорость 3000 об / мин. Максимальная частотная характеристика (электрическая скорость) двухтактных моделей составляет 100 кГц.
Итак, максимальная скорость, которую может вращать энкодер TRDA-25 на 100 PPR из-за скорости электроники, составляет (100 кГц / 100 PPR) x 60 с / мин = 60 000 об / мин (намного выше механического предела 3000 об / мин). Максимальная скорость, которую может вращать кодировщик TRDA-25 на 2500 PPR из-за скорости электроники, составляет (100 кГц / 2500 PPR) x 60 с / мин = 2400 об / мин (ниже механического предела 3000 об / мин).
Итак, если приложение требует высокой скорости или высокого разрешения, необходимо учитывать как механические, так и электрические ограничения скорости энкодера.
Хотя приведенная выше информация в основном предназначена для инкрементальных энкодеров, те же вычисления справедливы и для абсолютных энкодеров. Одно дополнительное соображение для абсолютных энкодеров заключается в том, что входы постоянного тока общего назначения не являются входами с высокой скоростью. Время отклика при выключении-включении и включении-выключении универсальных входных плат постоянного тока может ограничивать скорость абсолютного энкодера больше, чем частота переключения энкодера.
Прочие нотыНекоторые другие характеристики кодировщиков, предлагаемых в AutomationDirect:
Кодеры серии- TRD имеют метрические размеры. Энкодеры серии
- TRDA имеют размеры SAE (дюймы). Номера деталей кодировщика
- с буквой «V» в суффиксе относятся к моделям линейного драйвера.
- Все энкодеры Koyo поставляются со встроенным 2-метровым кабелем, кроме энкодеров TRDA-25: они имеют разъем MS (доступны отдельные соединительные кабели и разъемы).
- Муфты вала доступны для всех семейств энкодеров: метрических и метрических, дюйм-дюйм и метрических-дюймовых.
- Также доступны угловые монтажные кронштейны и различные круглые и квадратные фланцы
Джо Кимбрелл
Менеджер по продукции, Motion Products
Сообщение: 1 марта 2013 г.Проверено / обновлено 22 января 2021 г.
Найдите нужный интерфейс! Интерфейсы кодировщика
: Найдите нужный интерфейс! ПОЗИТАЛЬНЫЙНеверный адрес электронной почты или пароль. Пожалуйста, попробуйте еще раз.
PositalУчитывая широкий спектр приложений, которые относятся к категории «управление движением», очевидно, что не существует единого лучшего решения для всех проблем. Industrial Ethernet предлагает расширенные функции, которые чрезвычайно важны для разработчиков больших и сложных заводских систем.Однако для небольших, более автономных приложений подходят более простые технологии, такие как полевая шина (CANopen, PROFIBUS) или двухточечная проводка (SSI, Bit-Parallel или даже аналоговая). Датчики положения и движения POSITAL, включая угловые энкодеры IXARC, инклинометры TILTIX и датчики линейного положения LINARIX, доступны с полным набором интерфейсов связи.
Инкрементальные интерфейсы для энкодеров
Инкрементальные энкодеры генерируют выходной сигнал каждый раз, когда вал поворачивается на определенную величину.Количество сигналов на оборот определяет разрешение устройства.
HTL (Push-Pull) и TTL (RS422) – это формы последовательных соединений, которые подходят для непрерывных потоков данных, например, генерируемых инкрементным энкодером (т. Е. Энкодером, который выдает сигнал каждый раз, когда вал вращается через определенный угол.)
Подробнее об инкрементальном интерфейсе
Интерфейсы полевой шины для энкодеров
СетиFieldbus были разработаны для систем автоматизации транспортных средств, рабочих участков и заводов.Области применения варьируются от конвейеров и производственных объектов до мобильного оборудования, медицинского оборудования, ветряных турбин и солнечных батарей. Эти сети основаны на шинной топологии, которая упрощает разводку для систем со значительным количеством устройств. Они также поддерживают мощные диагностические инструменты, помогающие при настройке системы и устранении неисправностей.
Profibus доступен на многих ПЛК и является одной из наиболее распространенных технологий полевых шин в автоматизации производства и других областях. Он основан на RS485.
Подробнее об интерфейсе Profibus
CANopen – это протокол полевой шины, использующий сети CAN. CANopen доступен на многих ПЛК и широко используется в промышленной автоматизации и мобильных машинах.
Подробнее об интерфейсе CANopen
DeviceNet – это система fieldbus, основанная на сетях CAN и протоколе CIP. DeviceNet управляется ODVA, широко используется в автоматизации производства и доступна на многих ПЛК.
Подробнее об интерфейсе DeviceNet
Структура безопасности CANopen для связи, связанной с безопасностью, является дополнением к прикладному уровню CANopen и профилю связи.
Другие кодеры безопасности CANopen
CANopen Lift – это протокол полевой шины для лифтов. Он похож на CANopen и основан на использовании сетей CAN.
Другие энкодеры CANopen Lift
Interbus – это технология fieldbus, разработанная Phoenix Contact. Он был популярен на автомобильных заводах. Он может быть основан на разных электрических сетях и оптоволокне.
Подробнее об интерфейсе полевой шины
Интерфейсы IO-Link для энкодеров
IO-Link – это система связи, разработанная для упрощения соединений между крупномасштабными сетями fieldbus или промышленными сетями Ethernet и датчиками или исполнительными устройствами, расположенными на заводе.На одной стороне главного шлюза IO-Link находится интерфейс для сети предприятия, а на другой стороне имеется несколько соединений точка-точка с отдельными сенсорными устройствами.
IO-Link – это двухточечный интерфейс, позволяющий передавать данные процесса, диагностики и конфигурации, делая устройства готовыми к Индустрии 4.0.
Подробнее о кодерах IO-Link
Аналоговые интерфейсы для энкодеров
Аналоговые интерфейсы могут быть рентабельными для простых систем управления.Используя двухточечную проводку, их легко реализовать для небольших сетей (1-5 датчиков). Аналоговые установки распространены в таких приложениях, как автомобили, медицинское оборудование и управление энергопотреблением.
Промышленные интерфейсы Ethernet для энкодеров
В то время как промышленные системы Ethernet используют ту же базовую технологию, что и «офисный» Ethernet, они включают в себя специальное оборудование и программное обеспечение, обеспечивающие надежность и производительность «промышленного уровня». Industrial Ethernet поддерживает более крупные и сложные сети.Он также обеспечивает бесшовное соединение между заводской сетью (Industrial Ethernet) и корпоративной сетью (офисный Ethernet), что может упростить интеграцию систем производства, управления запасами и управления предприятием.
EtherNet / IP – это промышленный протокол связи, разработанный Rockwell Automation и управляемый ODVA. Он основан на протоколах CIP и TCP / IP.
Подробнее о кодерах EthernetNet / IP
EtherCAT – это открытая высокопроизводительная система Fieldbus на базе Ethernet.EtherCAT требует короткого времени обновления данных с низким джиттером связи и низкими затратами на оборудование.
Другие кодеры EtherCAT
Последовательные интерфейсы для энкодеров
Последовательные интерфейсы используют системы двухточечной проводки, но с цифровым интерфейсом, который подключается непосредственно к цифровым ПЛК или микроконтроллерам. Они предлагают хорошую скорость, высокое разрешение, гибкие кабели и надежную связь на расстоянии до нескольких сотен метров.
SSI – это широко используемый последовательный интерфейс с двухточечным соединением между ПЛК / главным устройством и кодировщиком.Он основан на стандарте RS422.
Подробнее об интерфейсе SSI
Параллельные интерфейсы для энкодеров
Параллельные интерфейсы могут обеспечивать очень высокоскоростную связь на короткие расстояния, но для этого требуются громоздкие кабели с отдельными проводами для каждого бита.
Загрузки
POSITAL Product Finders
Большой выбор – легко выбрать
БольшеКонтакт
Найдите ПОЗИТАЛЬНОГО партнера в вашем регионе!
Больше© FRABA B.В., Все права защищены.
Угловой энкодер и схема подключения ПЛК
автор: : HENGXIANG 2020-11-08
Как подключиться к датчику вращения PLC? Электронный сбор следующей информации, надеюсь, поможет вам в дизайне! Энкодер – это своего рода устройство измерения вращения, оно будет преобразовано в цифровые сигналы, непосредственно измеряющие угловое смещение ( Высокоскоростной импульсный сигнал) 。 Таким образом, выходной импульсный сигнал энкодера может быть напрямую введен в ПЛК, используя высокоскоростной счетчик ПЛК для подсчета импульсного сигнала, чтобы получить результаты измерений.В разных моделях поворотного энкодера количество фаз выходного импульса различается, некоторые угловые энкодеры выдают трехфазный импульс A, B и Z, некоторые только фазу A и B двухфазную, простейший – только фазу A. Как показано выше, энкодер с двумя импульсными выходами и схема подключения ПЛК серии FX. Есть четырехжильный кодер, 2 – линия импульсного выхода, 1 – обратная линия COM, 1 – шнур питания. Питание энкодера может быть внешним источником питания, также можно напрямую использовать источник питания PLC DC24V.Мощность ‘- «конец к концевому соединению COM энкодера», «+» подключен к концу источника питания энкодера. COM-конец энкодера, подключенный к входному COM-порту ПЛК, линия двухфазного импульсного выхода A, B напрямую соединена с входным концом ПЛК, чтобы обратить внимание на время отклика входного соединения ПЛК. Некоторый поворотный энкодер и экранирующая линия, экранирующий провод, который будет использоваться при заземлении. Шанхайский завод электроники, специализирующийся на производстве магнитоэлектрических энкодеров, энкодер широко используется в роботах, автоматических производственных линиях, автоматических сборочных машинах, лифтах, текстильном оборудовании, швейном оборудовании, упаковочном и полиграфическом оборудовании, станках с ЧПУ, картографах и приборах для измерения углов. , так далее.Магнитоэлектрический кодировщик также может быть в приложении ПЛК в качестве высокоскоростного элемента ввода сигнала, что позволяет ПЛК более быстро и точно реализовать управление с обратной связью. Найдите производителя магнитоэлектрического кодировщика, который ищет электронику.
mycnc: rotary_encoder_connection_and_setup [онлайн-документация myCNC]
В подвесках и панелях оператора широко используются 2 типа поворотных энкодеров:
Оба типа могут быть подключены к контроллеру myCNC и использовать панель управления оператора.
Подключение энкодера EN11
Энкодеры могут быть подключены к гальванически изолированным двоичным входам. 2 входа используются для подключения каждого энкодера.
Кодер следует настроить в Config> Inputs / Outputs / Sensors> MPG через диалоговое окно конфигурации двоичных входов .
Контроллеры myCNC поддерживают до 4 программных кодировщиков, определяемых через двоичные входы.
Настройка медленных энкодеров контроллера ET7
Плата управления myCNC-ET7 имеет 2 кодера (Encoder # 0, # 1), зарезервированные на постоянной основе.Эти энкодеры должны быть установлены на панели клавиатуры ET7-KEY и подключены к 20-контактному разъему X4 на плате управления ET7. Можно использовать внешние энкодеры без панели управления ET7-key и подключить их напрямую к контактам 11,12,13,14 и 19 X4. Дополнительную информацию о таблице выводов X4 в ET7 см. В таблице ниже:
| Разъем X4 для внешней 25-клавишной клавиатуры | ||
|---|---|---|
| Pin # | Имя | Комментарии |
| 11 | E # 0 | Двоичный вход # 16, En # 0 A |
| 12 | E # 1 | Двоичный вход # 17, En # 0 B |
| 13 | E # 2 | Двоичный вход # 18, En # 1 A |
| 14 | E # 3 | Двоичный вход # 19, En # 1 B |
| 19 | ЗЕМЛЯ |
Эти контакты на самом деле являются двоичными входами # 16, # 17, # 18, # 19, которые постоянно сконфигурированы как Encoder # 0 и Encoder # 1 в прошивке контроллера myCNC-ET7.По этой причине конфигурация Slow Encoders # 0, # 1 для контроллера ET7 в программном обеспечении myCNC игнорируется и может быть пропущена. Однако энкодер №2, энкодер №3 можно подключить к любому или двоичному входу и соответствующим образом сконфигурировать при использовании платы ET7.
Для всех остальных плат управления (ЕТ6, ЕТ10 и ЕТ15) конфигурации медленных энкодеров №0-3 активны и могут использоваться пользователями.
Пример настройки поворотных энкодеров показан на картинке ниже.
К входам №0,1,2,3 прикреплены 2 кодировщика, которые настраиваются в диалоговом окне.
Для контроллера ET7 энкодеры №0 и №1 подключаются к контактам 11–14 разъема X4 (или через клавиатуру ET7-KEY) и настраиваются, несмотря на то, что они отключены в окне настроек myCNC.
Настройка подключения энкодера через диалоговое окно конфигурации.
Энкодер общего назначения можно подключить к одной из системных переменных для удобного управления.
Существует диалоговое окно конфигурации (описанное далее в руководстве MyCNC Configuration Dialogs), которое можно использовать для установки связи между значениями медленного датчика положения и параметрами ЧПУ.
Источник – источник подключения – может быть энкодером, АЦП, контактом ввода / вывода, ШИМ, глобальной переменной или другими параметрами
Источник / Параметр – адрес источника. Это может быть номер кодировщика, номер входного контакта, адрес глобальной переменной и т. Д.
Назначение – соединение назначения
Destination / Parameter – адрес назначения
К – коэффициент назначения. Например, скорость шпинделя будет увеличиваться на 100 об / мин при каждом щелчке энкодера, если «K = 100».
K0 – передаточное число сдвига назначения. Обычно оставляют равным 0 (поле остается пустым).
Накладные поворотные энкодеры в основном используются для оперативного управления следующими значениями:
Поворотный энкодер должен быть подключен к элементу конфигурации XML «motion-overspeed» для управления превышением скорости [%]
Регистр глобальных переменных 7011 используется для изменения высоты резки на лету (эталонное напряжение дуги THC)
Чтобы изменить скорость шпинделя, можно использовать элемент XML «spindle-default-speed».
Дополнительную подборку часто используемых элементов можно найти в руководстве «Список общих элементов».
Устаревший метод установки соединения через файл конфигурации “cnc-variables.xml”.
Этот метод использовался до того, как был выпущен описанный выше диалог. Используется только в старых устаревших версиях программного обеспечения
Назначение подключения можно записать непосредственно в файле конфигурации cnc-variables.xml. Например:
<значение name = "cnc-connection-item-002" source = "кодировщик: 3" dest = "item: motion-overspeed"> 0
Энкодер №3 подключен к переменной превышения скорости движения .Значение превышения скорости (%) будет изменено вращением энкодера.
<значение name = "cnc-connection-item-003" source = "кодировщик: 2" dest = "item: cnc-gvariable-7012"> 0
источник = «энкодер: 2» – энкодер №2 определен как источник
dest = «item: cnc-gvariable-7012» – Глобальная переменная для THC Arc Voltage Adjustment, значение является местом назначения для соединения
Энкодер №2 подключен к регулятору напряжения THC Arc.Регулировка Значение дуги будет изменяться на «+1» или «-1» при каждом щелчке энкодера.
Устранение неполадок подключения энкодера
- Перейдите на страницу диагностики в программном обеспечении myCNC и проверьте, к каким двоичным входным контактам подключен кодировщик. Для этого контролируйте раздел двоичных входов на странице диагностики при повороте энкодера – соответствующие входные контакты должны мигать при перемещении диска энкодера. В этом примере используются входные контакты №18 и №19, как показано на следующем рисунке:
Убедитесь, что значения «Slow Encoder» изменяются при повороте энкодера.
Убедитесь, что значение пункта назначения изменилось при повороте энкодера.
После завершения проверки перезагрузите программу, чтобы обновить настройки до последней конфигурации.
mycnc / rotary_encoder_connection_and_setup.txt · Последнее изменение: 30.12.2019, 11:47, автор: ivan
IFM Encoder to S7-1200 HSC (S50A)
Узнайте, как подключить и использовать энкодер с входом высокоскоростного счетчика S7-1200 на портале TIA в этом выпуске шоу автоматизации.
Для получения дополнительной информации ознакомьтесь с разделом «Показать заметки», расположенным под видео.
The Automation Show, Episode 50A Show Notes:
Огромное спасибо IFM за отправку кодировщика RVP510 и компании Siemens за отправку нам S7-1200 для использования на выставке!Поддержите наш сайт и получите ранний доступ к нашим видео, бесплатные загрузки и многое другое!
Теперь вы можете поддержать наш сайт небольшим ежемесячным взносом и, в свою очередь, получать мгновенные вознаграждения! Чтобы узнать больше, посетите https: // Patreon.com / Автоматизация.
Вы также можете приобрести весь сезон The Automation Show за единовременное пожертвование в размере 30 долларов США по адресу https://vimeo.com/ondemand/theautomationshow.
Заранее благодарим за вашу поддержку!
Продавцов: Хотели бы вы, чтобы ваш продукт был представлен на шоу, подкастах и блогах? Если хотите, свяжитесь со мной по адресу: https://theautomationblog.com/contact
С уважением,
Шон Тирни
Инструктор по автоматизации и блоггер
Есть вопрос или комментарий по этой статье? Присоединяйтесь к нашему сообществу, чтобы принять участие в обсуждении! Вы также найдете все мои курсы в TheAutomationSchool.com. (345 просмотров)
Шон начал программировать еще подростком в начале 80-х, а после получения степени в области электроники проработал 25 лет специалистом по автоматизации. В 1999 году Шон запустил свой первый веб-сайт, который был предшественником TheAutomationBlog.com, который он запустил в 2013 году. Сегодня Шон продолжает публиковать и редактировать контент для The Automation Blog, а также преподает курсы PLC, HMI и SCADA на TheAutomationSchool.com.
Последние сообщения от Шона Тирни (посмотреть все)Связанные
1734-UM006B, Модули кодировщика / счетчика Руководство пользователя
% PDF-1.6 % 904 0 объект > endobj 907 0 объект > endobj 924 0 объект > endobj 901 0 объект > поток Acrobat Distiller 5.0.5 (Windows) 1734-IJ, 1734-IK2005-08-12T13: 07: 23Z2008-06-27T18: 40: 30-04: 002008-06-27T18: 40: 30-04: 00FrameMaker 7.0приложение / pdf
