
История создания электродвигателя
Электромеханика является относительно молодой, по историческим меркам, отраслью науки и техники.
1800, Вольта
Итальянский физик, химик и физиолог, Алессандро Вольта, первый в мире создал химический источник тока.
1820, Эрстед
Датский ученый, физик, Ханс Кристиан Эрстед, обнаружил на опыте отклоняющее действие тока на магнитную стрелку.
1821, Фарадей
Первый электродвигатель Фарадея, 1821 г.
Британский физик-экспериментатор и химик, Майкл Фарадей, опубликовал трактат “О некоторых новых электромагнитных движениях и о теории магнетизма”, где описал, как заставить намагниченную стрелку непрерывно вращаться вокруг одного из магнитных полюсов. Эта конструкция впервые реализовала непрерывное преобразование электрической энергии в механическую. Принято считать ее первым электродвигателем в истории.
1822, Ампер
Французский физик, Андре Мари Ампер, открыл магнитный эффект соленоида (катушки с током), откуда следовала идея эквивалентности соленоида постоянному магниту.
1822, Барлоу
Английский физик и математик, Питер Барлоу, изобрел колесо Барлоу, по сути, униполярный электродвигатель.
1825, Араго
Французский физик и астроном, Доминик Франсуа Жан Араго, опубликовал опыт показывающий, что вращающийся медный диск заставляет вращаться магнитную стрелку, подвешенную над ним.
1825, Стёрджен
Британский физик, электротехник и изобретатель, Уильям Стёрджен, в 1825 изготовил первый электромагнит, который представлял из себя согнутый стержень из мягкого железа с обмоткой из толстой медной проволоки.
Вращающееся устройство Йедлика, 1827/28 гг.
1827, Йедлик
Венгерский физик и электротехник, Аньош Иштван Йедлик, изобрел первую в мире динамо-машину (генератор постоянного тока), однако практически не объявлял о своем изобретении до конца 1850-х годов.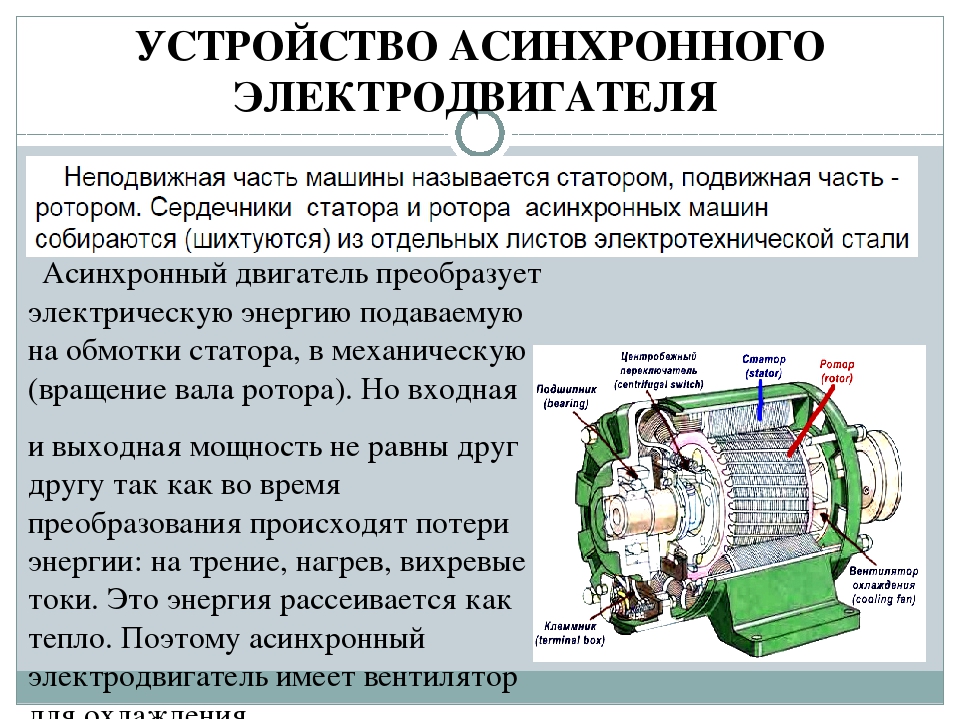
1831, Фарадей
Английский физик, Майкл Фарадей, открыл электромагнитную индукцию, то есть явление возникновения электрического тока в замкнутом контуре при изменении магнитного потока, проходящего через него. Формулировка закона электромагнитной индукции.
1831, Генри
Американский физик, Джозеф Генри, независимо от Фарадея обнаружил взаимоиндукцию, но Фарадей раньше опубликовал свои результаты.
1832, Пикси
Генератор постоянного тока Пикси
Француз, Ипполит Пикси, сконструировал первый генератор переменного тока. Устройство состояло из двух катушек индуктивности с железным сердечником напротив которых располагался вращающийся магнит подковообразной формы, который приводился в движение вращением рычага. Позже для получения постоянного пульсирующего тока к этому устройству был добавлен коммутатор.
Электродвигатель Стёрджена
Strurgejn’s Annals of Electricity, 1836/37, vol. 1
1
1833, Стёрджен
Британский физик, Уильям Стёрджен, публично продемонстрировал электродвигатель на постоянном токе в Марте 1833 года в Аделаидской галерее практической науки в Лондоне. Данное изобретение считается первым электродвигателем, который можно было использовать.
1833, Ленц
В начале в электромеханике разграничивали магнито-электрические машины (электрические генераторы) и электро-магнитные машины (электрические двигатели). Российский физик (немецкого происхождения), Эмилий Христианович Ленц, опубликовал статью о законе взаимности магнито-электрических явлений, то есть о взаимозаменяемости электрического двигателя и генератора.
Май 1834, Якоби
Первый вращающийся электродвигатель. Якоби, 1834
Немецкий и русский физик, академик Императорской Санкт-Петербургской Академии Наук, Борис Семенович (Мориц Герман фон) Якоби, изобрел первый в мире электродвигатель с непосредственным вращением рабочего вала.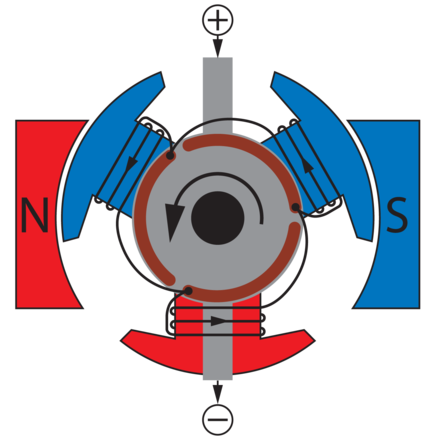 Мощность двигателя составляла около 15 Вт, частота вращения ротора 80-120 оборотов в минуту. До этого изобретения существовали только устройства с возвратно-поступательным или качательным движением якоря.
Мощность двигателя составляла около 15 Вт, частота вращения ротора 80-120 оборотов в минуту. До этого изобретения существовали только устройства с возвратно-поступательным или качательным движением якоря.
1836 – 1837, Дэвенпорт
Проводя эксперименты с магнитами, американский кузнец и изобретатель, Томас Дэвенпорт, создает свой первый электромотор в июле 1834 года. В декабре этого же года он впервые продемонстрировал свое изобретение. В 1837 году Дэвенпорт получил первый патент (патент США №132) на электрическую машину.
1839, Якоби
Используя электродвигатель питающийся от 69 гальванических элементов Грове и развивающий 1 лошадиную силу, в 1839 г. Якоби построил лодку способную двигаться с 14 пассажирами по Неве против течения. Это было первое практическое применение электродвигателя.
1837 – 1842, Дэвидсон
Шотландский изобретатель, Роберт Дэвидсон, занимался разработкой электродвигателя с 1837 года. Он сделал несколько приводов для токарного станка и моделей транспортного средства. Дэвидсон изобрел первый электрический локомотив.
Дэвидсон изобрел первый электрический локомотив.
1856, Сименс
Немецкий инженер, изобретатель, ученый, промышленник, основатель фирмы Siemens, Вернер фон Сименс изобрел электрический генератор с двойным T-образным якорем. Он первый разместил обмотки в пазах.
1861-1864, Максвелл
Британский физик, математик и механик, Джеймс Клерк Максвелл, обобщил знания об электромагнетизме в четырех фундаментальных уравнениях. Вместе с выражением для силы Лоренца уравнения Максвелла образуют полную систему уравнений классической электродинамики.
1871-1873, Грамм
Бельгийский изобретатель, Зеноб Теофил Грамм, устранил недостаток электрических машин с двух-Т-образным якорем Сименса, который заключался в сильных пульсациях вырабатываемого тока и быстром перегреве. Грамм предложил конструкцию генератора с самовозбуждением, который имел кольцевой якорь.
1885, Феррарис
Итальянский физик и инженер, Галилео Феррарис, изобрел первый двухфазный асинхронный электродвигатель. Однако Феррарис думал, что такой двигатель не сможет иметь КПД выше 50%, поэтому он потерял интерес и не продолжал улучшать асинхронный электродвигатель. Считается, что Феррарис первым объяснил явление вращающегося магнитного поля.
Однако Феррарис думал, что такой двигатель не сможет иметь КПД выше 50%, поэтому он потерял интерес и не продолжал улучшать асинхронный электродвигатель. Считается, что Феррарис первым объяснил явление вращающегося магнитного поля.
1887, Тесла
1889-1891, Доливо-Добровольский
Русский электротехник польского происхождения, Михаил Осипович Доливо-Добровольский, прочитав доклад Феррариса о вращающемся магнитном поле изобрел ротор в виде “беличьей клетки”. Дальнейшая работа в этом направлении привела к разработке трехфазной системы переменных токов и трехфазного асинхронного электродвигателя, получившего широкое применение в промышленности и практически не изменившегося до нашего времени.
Широкое внедрение электромеханических устройств в России начинается после Октябрьской революции 1917 г., когда электрификация всей страны стала основой технической политики нового государства. Можно сказать, что XX век стал веком становления и широкого распространения электромеханики.
Выбор между двухфазной и трехфазной системой
Доливо-Добровольский справедливо считал, что увеличение числа фаз в двигателе улучшает распределение намагничивающей силы по окружности статора. Переход к трехфазной системы от двухфазной уже дает большой выигрыш в этом отношении. Дальнейшее увеличение числа фаз нецелесообразно, так как приводит к значительному увеличению расходов металла на провода.
Для Теслы же казалось очевидным, что чем меньше число фаз, тем меньше требуется проводов, и следовательно тем дешевле устройство электропередачи. При этом двухфазная система передачи требовала применения четырех проводов, что представлялось не желательным в сравнении с двух проводными системами постоянного или однофазного переменного токов.
Таким образом трехфазная система токов предложенная Доливо-Добровольским была оптимальной для передачи энергии. Она практически сразу нашла широкое применение в промышленности и до наших дней является основной системой передачи электрической энергии во всем мире.
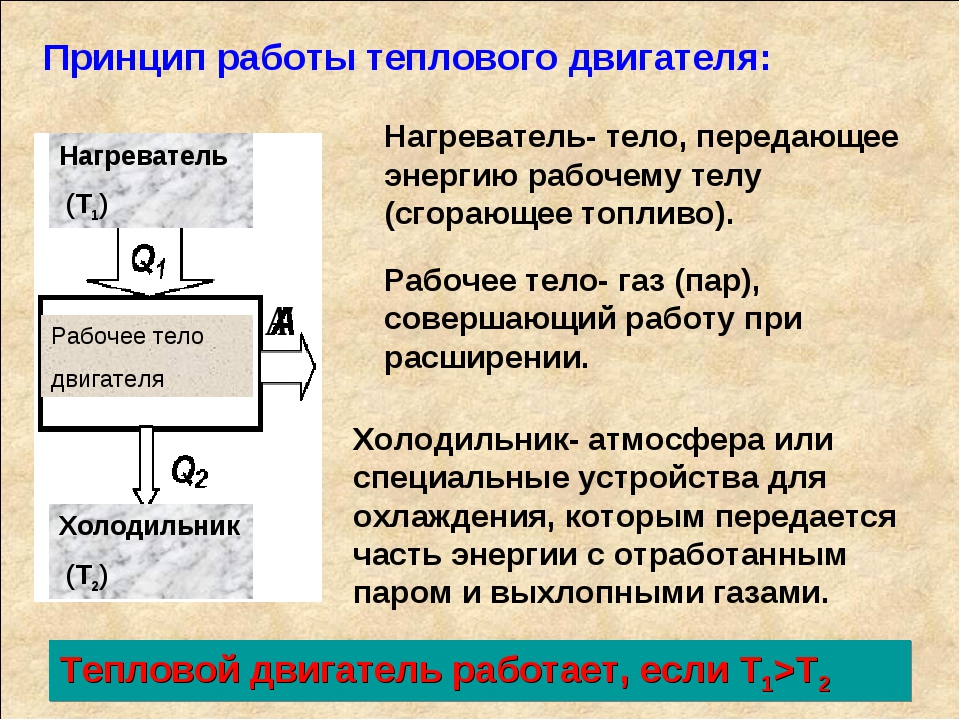
Электродвигатель постоянного тока: принцип работы и действия, устройство, характеристики
Сейчас невозможно представить нашу жизнь без электродвигателей. Они приводят в действие станки, бытовую технику и инструменты, поезда, трамваи и троллейбусы, компьютеры, игрушки и разные подвижные механизмы, устанавливаются на производственных станках, если частоту вращения рабочего вала требуется регулировать в широком диапазоне. Агрегаты для преобразования электрической энергии в механическую представлены множеством видов и моделей (синхронные, асинхронные, коллекторные и т.
Краткая история создания
Разные ученые пытались создать экономичный и мощный двигатель еще с первой половины 19 века. Основой послужило открытие М.Фарадея, сделанное в 1821 г. Он обнаружил, что помещенный в магнитное поле проводник вращается. Отталкиваясь от этого, в 1833 г изобретатель Томас Дэвенпорт смог сконструировать двигатель постоянного тока, а позже, в 1834 г, ученый Б.С.Якоби придумал прообраз современной модели двигателя с вращающимся валом. Устройство, более похожее на современные агрегаты, появилось в 1886 г, и до сегодняшнего дня электродвигатель продолжает совершенствоваться.
Принцип действия электродвигателя постоянного тока
На мысль о создании двигателя ученых натолкнуто следующее открытие. Помещенная в магнитное поле проволочная рамка с пропущенным по ней током начинает вращаться, создавая механическую энергию. Принцип действия электродвигателя постоянного тока основывается на взаимодействии магнитных полей рамки и самого магнита.
Вместо рамок в двигателе используется набор проводников, на которые подается ток, и якорь. При запуске вокруг него возбуждается магнитное поле, взаимодействующее с полем обмотки. Это заставляет якорь повернуться на определенный угол. Подача тока на следующие проводники приводит к следующему повороту якоря, и далее процесс продолжается.
Магнитное поле создается либо с помощью постоянного магнита (в маломощных агрегатах), либо с помощью индуктора/обмотки возбуждения (в более мощных устройствах).
Попеременную зарядку проводников якоря обеспечивают щетки, сделанные из графита или сплава графита и меди. Они служат контактами, замыкающими электрическую сеть на выводы пар проводников. Изолированные друг от друга выводы представляют собой кольцо из нескольких ламелей, которое находится на оси вала якоря и называется коллекторным узлом. Благодаря поочередному замыканию ламелей щетками двигатель вращается равномерно. Степень равномерности работы двигателя зависит от количества проводников (чем больше, тем равномернее).
Благодаря поочередному замыканию ламелей щетками двигатель вращается равномерно. Степень равномерности работы двигателя зависит от количества проводников (чем больше, тем равномернее).
Устройство электродвигателя постоянного тока
Теперь, когда вы знаете, как работает электродвигатель постоянного тока, пора ознакомиться с его конструкцией.
Как и у других моделей, основу двигателя составляют статор (индуктор) – неподвижная часть, и якорь вкупе с щеточноколлекторным узлом – подвижная часть. Обе части разделены воздушным зазором.
В состав статора входят станина, являющаяся элементом магнитной цепи, а также главные и добавочные полюса. Обмотки возбуждения, необходимые для создания магнитного поля, находятся на главных полюсах. Специальная обмотка, улучшающая условия коммутации, расположена на добавочных полюсах.
Якорь представляет собой узел, состоящий из магнитной системы (она собрана из нескольких листов), набора обмоток (проводников), уложенных в пазы, и коллектора, который подводит постоянный ток к рабочей обмотке.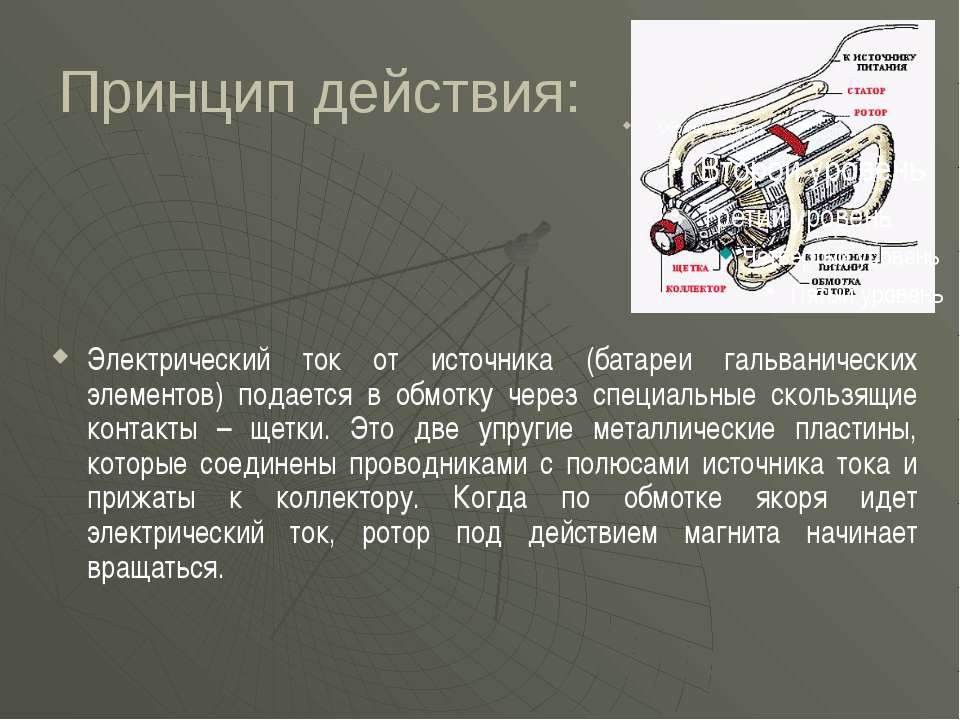
Коллектор имеет вид цилиндра, собранного из изолированных медных пластин. Он насажен на вал двигателя и имеет выступы, к которым подходят концы секций обмотки якоря. Щетки снимают ток с коллектора, входя с ним в скользящий контакт. Удержание щеток в нужном положении и обеспечение их нажатия на коллектор с определенной силой осуществляется щеткодержателями.
Многие модели двигателей оснащены вентилятором, задача которого – охлаждение агрегата и увеличение продолжительности рабочего периода.
Особенности и характеристики электродвигателя постоянного тока
Эксплуатационные характеристики электродвигателя постоянного тока позволяют широко использовать это устройство в самых разных сферах – от бытовых приборов до транспорта. К его преимуществам можно отнести:
- Экологичность. При работе не выделяются вредные вещества и отходы.
- Надежность. Благодаря довольно простой конструкции он редко ломается и служит долго.
- Универсальность. Он может использоваться в качестве как двигателя, так и генератора.

- Простота управления.
- Возможность регулирования частоты и скорости вращения вала – достаточно подключить агрегат в цепь переменного сопротивления.
- Легкость запуска.
- Небольшие размеры.
- Возможность менять направление вращения вала. В двигателе с последовательным возбуждением нужно изменить направление тока в обмотке возбуждения, во всех остальных типах – в якоре.
Как и любое устройство, электродвигатели постоянного тока имеют и «слабые стороны»:
- Их себестоимость, следовательно, и цена достаточно высока.
- Для подключения к сети необходим выпрямитель тока.
- Самая уязвимая и быстроизнашивающаяся деталь – щетки – требует периодической замены.
- При сильной перегрузке может случиться возгорание. Если соблюдать правила эксплуатации, такая возможность исключена.
Но, как видите, достоинства явно перевешивают, поэтому на данный момент электродвигатель является одним из наиболее экономичных и эффективных устройств. Зная устройство и принцип работы электродвигателя постоянного тока, вы сможете самостоятельно собрать и разобрать его для техосмотра, чистки или устранения неисправностей.
Зная устройство и принцип работы электродвигателя постоянного тока, вы сможете самостоятельно собрать и разобрать его для техосмотра, чистки или устранения неисправностей.
Устройство и принцип работы электродвигателя переменного тока
Электродвигатель – это электротехническое устройство для преобразования электрической энергии в механическую. Сегодня повсеместно применяются электромоторы в промышленности для привода различных станков и механизмов. В домашнем хозяйстве они установлены в стиральной машине, холодильнике, соковыжималке, кухонном комбайне, вентиляторах, электробритвах и т. п. Электродвигатели приводят в движение, подключенные к ней устройства и механизмы.
В этой статье Я расскажу о самых распространенных видах и принципах работы электрических двигателей переменного тока, широко используемых в гараже, в домашнем хозяйстве или мастерской.
Как работает электродвигатель
Двигатель работает на основе эффекта, обнаруженного Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита может возникнуть непрерывное вращение.
Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита может возникнуть непрерывное вращение.
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться. В результате рамка повернется в горизонтальное положения, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент. На рисунке это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
В быту же постоянные магниты используются в детских игрушках на батарейках.
В других же более мощных двигателях используются только электромагниты или обмотки. Вращающаяся часть с ними называется ротор, а неподвижная- статор.
Виды электродвигателей
Сегодня существуют довольно много электродвигателей разных конструкций и типов. Их можно разделить по типу электропитания:
- Переменного тока, работающие напрямую от электросети.
- Постоянного тока, которые работают от батареек, АКБ, блоков питания или других источников постоянного тока.
По принципу работы:
- Синхронные, в которых есть обмотки на роторе и щеточный механизм для подачи на них электрического тока.
- Асинхронные, самый простой и распространенный вид мотора. В них нет щеток и обмоток на роторе.
Синхронный мотор вращается синхронно с магнитным полем, которое его вращает, а у асинхронного ротор вращается медленнее вращающегося магнитного поля в статоре .
Принцип работы и устройство асинхронного электродвигателя
В корпусе асинхронного двигателя укладываются обмотки статора (для 380 Вольт их будет 3), которые создают вращающееся магнитное поле. Концы их для подключения выводятся на специальную клеммную колодку. Охлаждаются обмотки, благодаря вентилятору, установленному на вале в торце электродвигателя.
Ротор, являющиеся одним целым с валом, изготавливается из металлических стержней, которые замыкаются между собой с обоих сторон, поэтому он и называется короткозамкнутым.
Благодаря такой конструкции отпадает необходимость в частом периодическом обслуживании и замене токоподающих щеток, многократно увеличивается надежность, долговечность и безотказность.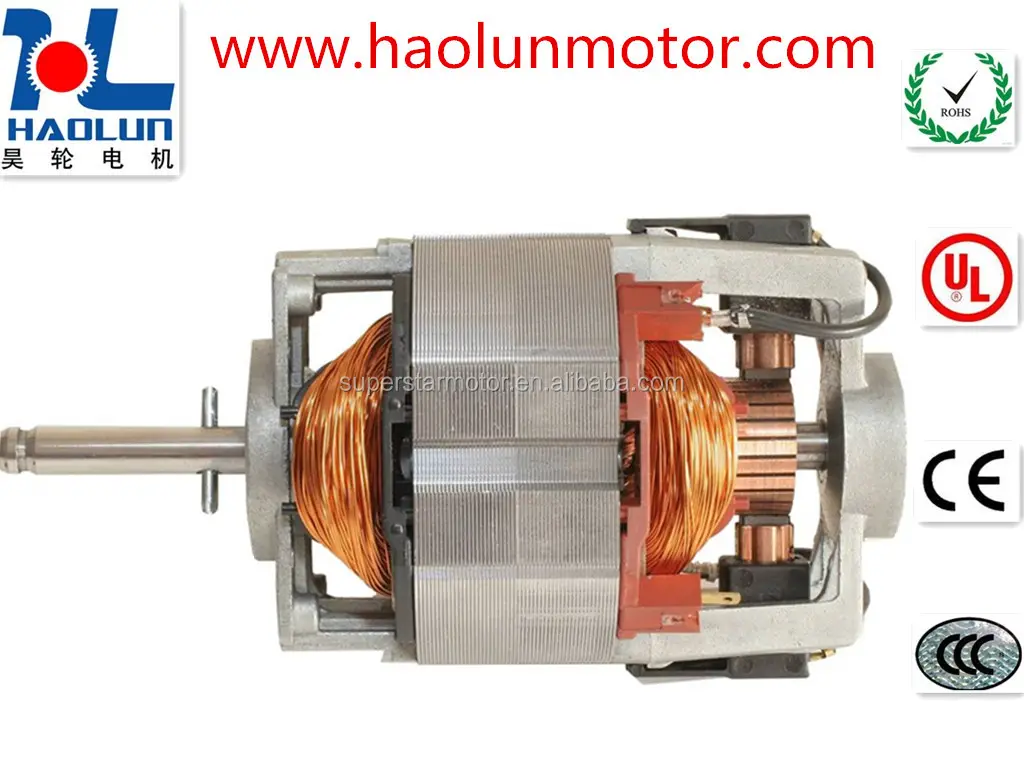
Как правило, основной причиной поломки асинхронного мотора является износ подшипников, в которых вращается вал.
Принцип работы. Для того что бы работал асинхронный двигатель необходимо, что бы ротор вращался медленнее электромагнитного поля статора, в результате чего наводится ЭДС (возникает электроток) в роторе. Здесь важное условие, если бы ротор вращался с такой же скоростью как и магнитное поле, то в нем по закону электромагнитной индукции не наводилось бы ЭДС и, следовательно не было бы вращения. Но в реальности, из-за трения подшипников или нагрузки на вал, ротор всегда будет вращаться медленнее.
Магнитные полюса постоянно вращаются в обмотках мотора, и постоянно меняется направление тока в роторе. В один момент времени, например направление токов в обмотках статора и ротора изображено схематично в виде крестиков (ток течет от нас) и точек (ток на нас). Вращающееся магнитное поле изображено изображено пунктиром.

Например, как работает циркулярная пила. Наибольшие обороты у нее без нагрузки. Но как только мы начинаем резать доску, скорость вращения уменьшается и одновременно с этим ротор начинает медленнее вращаться относительно электромагнитного поля и в нем по законам электротехники начинает наводится еще большей величины ЭДС. Вырастает потребляемый ток мотором и он начинает работать на полной мощности. Если же нагрузка на вал будет столь велика, что его застопорит, то может возникнуть повреждение короткозамкнутого ротора из-за максимальной величины наводимой в нем ЭДС. Вот почему важно подбирать двигатель, подходящей мощности. Если же взять большей, то неоправданными будут энергозатраты.
Скорость вращения ротора зависит от количества полюсов. При 2 полюсах скорость вращения будет равна скорости вращения магнитного поля, равного максимум 3000 оборотов в секунду при частоте сети 50 Гц. Что бы понизить скорость вдвое, необходимо увеличить количество полюсов в статоре до четырех.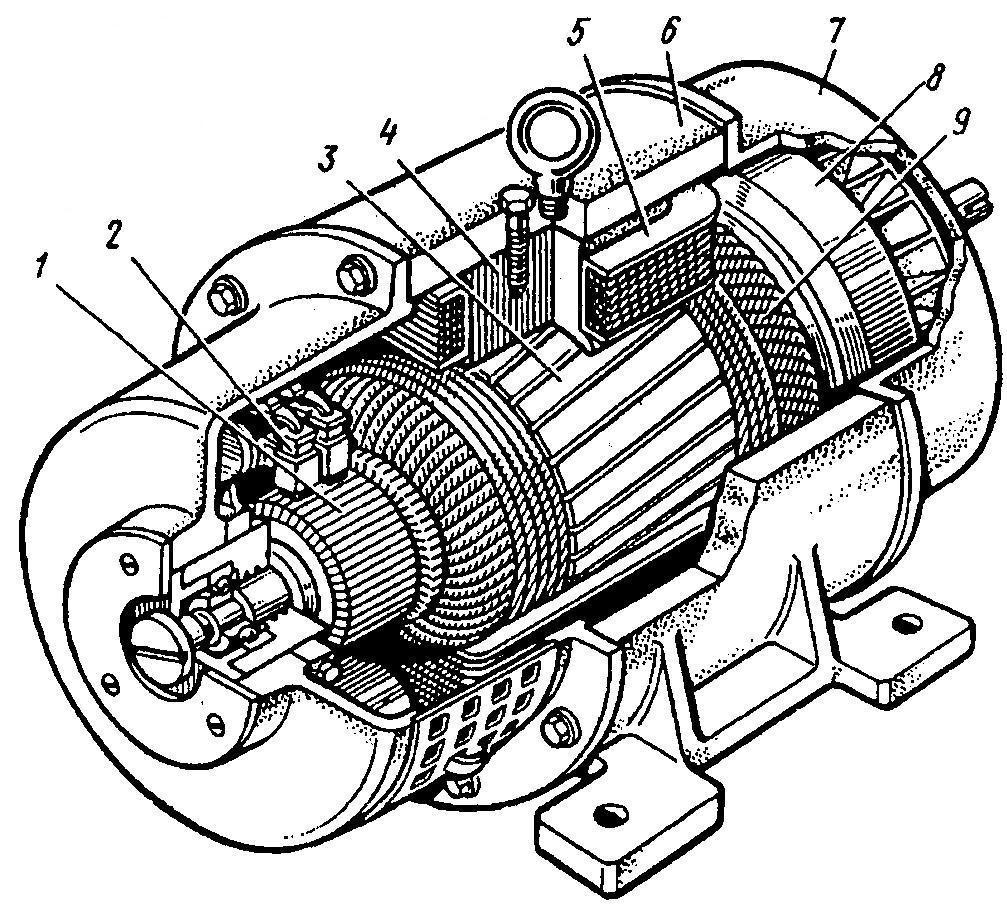
Весомым недостатком асинхронных двигателей является то, что они подаются регулировке скорости вращения вала только при помощи изменения частоты электрического тока. А так не возможно добиться постоянной частоты вращения вала.
Принцип работы и устройство синхронного электродвигателя переменного тока
Данный вид электродвигателя используется в быту там, где необходима постоянная скорость вращения, возможность ее регулировки, а так же если необходима скорость вращения более 3000 оборотов в минуту (это максимум для асинхронных).
Синхронные моторы устанавливаются в электроинструменте, пылесосе, стиральной машине и т. д.
В корпусе синхронного двигателя переменного тока расположены обмотки (3 на рисунке), которые также намотаны и на ротор или якорь (1). Их выводы припаяны к секторам токосъемного кольца или коллектора (5), на которые при помощи графитовых щеток (4) подается напряжение. При чем выводы расположены так, что щетки всегда подают напряжение только на одну пару.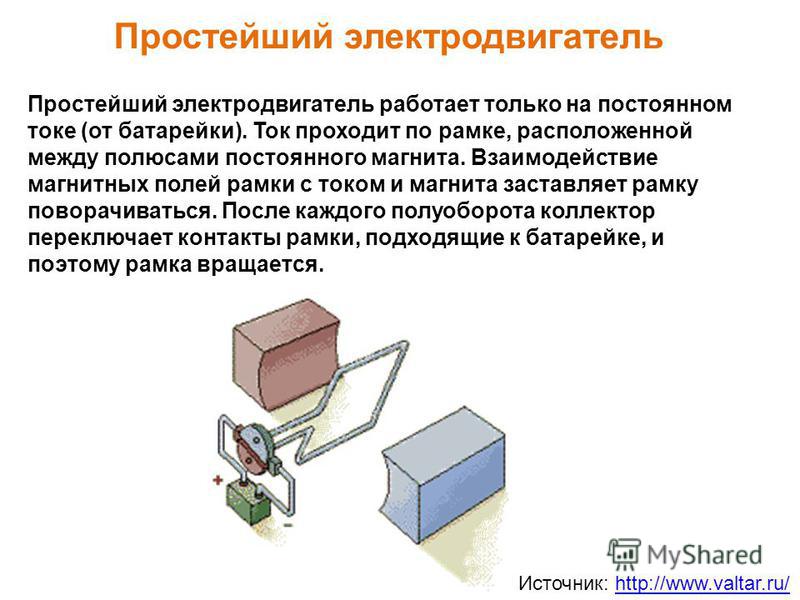
Наиболее частыми поломками коллекторных двигателей является:
- Износ щеток или их плохой их контакт из-за ослабления прижимной пружины.
- Загрязнение коллектора. Чистите либо спиртом или нулевой наждачной бумагой.
- Износ подшипников.
Принцип работы. Вращающий момент в электромоторе создается в результате взаимодействия между током тока якоря и магнитным потоком в обмотке возбуждения. С изменением направления переменного тока будет меняться и направление магнитного потока одновременно в корпусе и якоре, благодаря чему вращение всегда будет в одну сторону.
Регулировка скорости вращения меняется методом изменения величины подаваемого напряжения. В дрелях и пылесосах для этого используется реостат или переменное сопротивление.
Изменение направления вращения происходит также как и у двигателей постоянного тока, о которых Я расскажу в следующей статье.
Самое главное о синхронных двигателях Я постарался изложить, более подробно Вы можете прочитать на них на Википедии.
Режимы работы электродвигателя в следующей статье.
Принцип действия электродвигателя
Электродвигателем называется устройство, принцип действия которого преобразование электрической энергии в механическую. Такое преобразование используется для запуска в работу всевозможных видов техники, начиная от самого простого рабочего оборудования и заканчивая автомобилями. Однако при всей полезности и продуктивности такого преобразования энергий, в данном свойстве есть небольшой побочный эффект, который проявляется в повышенном выделении тепла. Именно поэтому электрические двигатели оснащаются дополнительным оборудованием, которое способно охладить его и позволить работать в бесперебойном режиме.
Принцип работы электродвигателя – основные функциональные элементы
Любой электрический двигатель состоит из двух основных элементов, один из которых является неподвижным, такой элемент называется статором.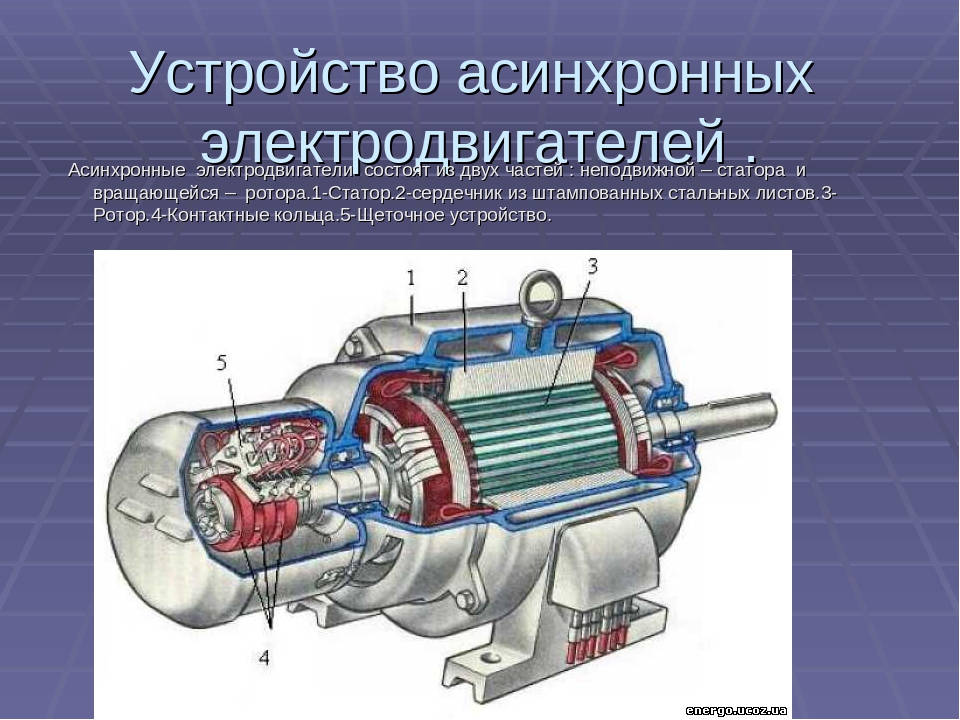 Второй элемент является подвижным, эта часть двигателя называется ротором. Ротор электрического двигателя может быть выполнен в двух вариантах, а именно может быть короткозамкнутым и с обмоткой. Хотя последний тип на сегодняшний день является достаточно большой редкостью, поскольку сейчас повсеместно используются такие устройства, как частотные преобразователи.
Второй элемент является подвижным, эта часть двигателя называется ротором. Ротор электрического двигателя может быть выполнен в двух вариантах, а именно может быть короткозамкнутым и с обмоткой. Хотя последний тип на сегодняшний день является достаточно большой редкостью, поскольку сейчас повсеместно используются такие устройства, как частотные преобразователи.
Принцип действия электродвигателя основана на выполнении следующих этапов работы. Во время включения в сеть, в статоре начинает осуществлять вращение возникшее поле магнитного типа. Оно действует на обмотку статора, в которой при этом возникает ток индукционного типа. Согласно закону Ампера, ток начинает действовать на ротор, который под этим действием начинает свое вращение. Непосредственно частота вращения ротора напрямую зависит от того, какой силы действия возникает ток, а так же от того, какое количество полюсов при этом возникает.
Принцип работы электродвигателя – разновидности и типы
На сегодняшний день наиболее распространенными считаются двигатели, которые имеют магнитоэлектрический тип. Есть еще тип электродвигателей, которые называют гистерезисные, однако они не являются распространенными. Первый тип электродвигателей, магнитоэлектрического вида, могут подразделяться еще на два подтипа, а именно электродвигатели постоянного тока и двигатели переменного тока.
Первый вид двигателей осуществляет свою работу от постоянного тока, эти типы электродвигателей используются тогда, когда возникает необходимость регулировки скоростей. Данные регулировки осуществляются посредством изменений напряжения в якоре. Однако сейчас существует большой выбор всевозможных преобразователей частот, поэтому такие двигатели стали применяться все реже и реже.
Двигатели переменного тока соответственно работают посредством действия тока переменного типа. Здесь так же имеется своя классификация, и двигатели делятся на синхронные и асинхронные. Их основным различием становится разница во вращении необходимых элементов, в синхронном движущая гармоника магнитов движется с той же скоростью, что и ротор. В асинхронных двигателях наоборот, ток возникает за счет разницы в скоростях движения магнитных элементов и ротора.
Благодаря своим уникальным характеристикам и принципам действия электродвигатели на сегодняшний день распространенны гораздо больше, чем скажем двигатели внутреннего сгорания, поскольку они обладают рядом преимуществ перед ними. Так коэффициент полезного действия электродвигателей является очень высоким, и может достигать почти 98%. Так же электродвигатели отличаются высоким качеством и очень долгим рабочим ресурсом, они не издают много шума, и во время работы практически не вибрируют. Большим преимуществом такого типа двигателей является то, что они не нуждаются в топливе, и как результат не выделяют в атмосферу никаких загрязняющих веществ. К тому их использование является намного более экономичным, по сравнению с двигателями внутреннего сгорания.
Бесколлекторный двигатель постоянного тока: особенности и принцип работы
Как работает бесколлекторный двигатель?Бесколлекторный двигатель постоянного тока имеет на статоре трёхфазную обмотку, и постоянный магнит на роторе. Вращающееся магнитное поле создаётся обмоткой статора, при взаимодействии с которым магнитный ротор приходит в движение. Для создания вращающегося магнитного поля на обмотку статора подаётся система трёхфазных напряжений, которая может иметь различную форму и формируется различными способами. Формирование питающих напряжений (коммутация обмоток) для бесколлекторного двигателя постоянного тока производиться специализированными блоками электроники – контроллером двигателя.
Заказать бесколлекторный двигатель в нашем каталоге
В простейшем случае обмотки попарно подключаются к источнику постоянного напряжения и по мере того как ротор поворачивается в направлении вектора магнитного поля обмотки статора производится подключение напряжения к другой паре обмоток. Вектор магнитного поля статора при этом занимает другое положение и вращение ротора продолжается. Для определения нужного момента подключения следующих обмоток используется датчик положения ротора, чаще других используются датчики Холла.
Выпускаемые сейчас бесколлекторные двигатели могут иметь самую разную конструкцию.
По исполнению статорной обмотки можно выделить двигатели с классической обмоткой, намотанной на стальной сердечник, и двигатели с полой цилиндрической обмоткой без стального сердечника. Классическая обмотка обладает значительно большей индуктивностью, чем полая цилиндрическая обмотка, и соответственно большей постоянной времени. Из-за этого с одной стороны, полая цилиндрическая обмотка допускает более динамичное изменение тока (а, следовательно, и момента), с другой стороны при работе от контроллера двигателя, использующего ШИМ-модуляцию невысокой частоты для сглаживания пульсаций тока, требуются фильтрующие дроссели большего номинала (а соответственно и большего размера). Кроме того, классическая обмотка, как правило, имеет заметно больший момент магнитной фиксации, а также меньший КПД, чем полая цилиндрическая обмотка.
Ещё одно отличие, по которому разделяются различные модели двигателей – это взаимное расположение ротора и статора – существуют двигатели с внутренним ротором и двигатели с внешним ротором. Двигатели с внутренним ротором, как правило, имеют более высокие скорости и меньший момент инерции ротора, чем модели с внешним ротором. Благодаря этому двигатели с внутренним ротором имеют более высокую динамику. Двигатели с внешним ротором часто имеют несколько больший номинальный момент при том же наружном диаметре двигателя.
Отличия от других типов двигателейОтличия от коллекторных ДПТ. Размещение обмотки на роторе позволило отказаться от щёток и коллектора и избавиться тем самым от подвижного электрического контакта, который значительно снижает надёжность ДПТ с постоянными магнитами. По этой же причине скорость у бесколлекторных двигателей, как правило, значительно выше, чем у ДПТ с постоянными магнитами. С одной стороны это позволяет увеличить удельную мощность бесколлекторного двигателя, с другой стороны не для всех применений такая высокая скорость является действительно необходимой
Отличия от синхронных двигателей с постоянными магнитами. Синхронные двигатели с постоянными магнитами на роторе очень похожи на бесколлекторные ДПТ по конструкции, однако есть и ряд различий. Во-первых термин синхронный двигатель объединяет в себе много различных видов двигателей, часть из которых предназначены для непосредственной работы от стандартной сети переменного тока, другая часть (например синхронные серводвигатели) может работать только от преобразователей частоты (контроллеров двигателей). Бесколлекторные двигатели, хотя и имеют на статоре трёхфазную обмотку, не допускают непосредственную работу от сетевого напряжения, и обязательно требуют наличия соответствующего контроллера. Кроме того синхронные двигатели предполагают питание напряжением синусоидальной формы в то время как бесколлекторные двигатели допускают питание переменным напряжением ступенчатой формы (блочная коммутация) и даже предполагают его использование в номинальных режимах работы.
Когда нужен бесколлекторный двигатель?Ответ на этот вопрос достаточно прост – в тех случаях, когда он имеет преимущество перед остальными типами двигателей. Так, например, практически невозможно обойтись без бесколлекторного двигателя в применениях, где требуются большие скорости вращения: свыше 10000 об/мин. Оправдано применение бесколлекторных двигателей также и в тех случаях, когда требуется высокий срок службы двигателя. В тех случаях, когда требуется применять сборку из двигателя с редуктором, однозначно оправдано применение низкоскоростных бесколлекторных двигателей (с большим числом полюсов). Высокоскоростные бесколлекторные двигатели в этом случае будут иметь скорость выше, чем предельно допустимая скорость редуктора, и по этой причине не будет возможности использовать их мощность полностью. Для применений, где требуется максимально простое управление двигателем (без использования контроллера двигателя) естественным выбором будет коллекторный ДПТ.
С другой стороны, в условиях повышенной температуры или повышенной радиации проявляется слабое место бесколлекторных двигателей – датчики Холла. Стандартные модели датчиков Холла имеют ограниченную стойкость к радиации и диапазон рабочих температур. Если в подобном применении всё же имеется необходимость использовать бесколлекторный двигатель, то неизбежными становятся заказные исполнения с заменой датчиков Холла на более стойкие к указанным факторам, что увеличивает цену двигателя и сроки поставки.
Электродвигатель. Виды и применение. Работа и устройство
Электродвигатель представляет электромашину, перестраивающую электрическую энергию в механическую. Обычно электрическая машина реализует механическую работу благодаря потреблению приложенной к ней электроэнергии, преобразовывающейся во вращательное движение. Ещё в технике есть линейные двигатели, способные создавать сразу поступательное движение рабочего органа.
Особенности конструкции и принцип действия
Не важно какое конструктивное исполнение, но устройство любых электродвигателей однотипное. Ротор и статор находятся внутри цилиндрической проточки. Вращение ротора возбуждают магнитное поле, отталкивающее его полюса от статора (неподвижной обмотки). Сохранять постоянное отталкивание можно путём перекоммутации обмоток ротора, или образовав вращающееся магнитное поле непосредственно в статоре. Первый способ присущий коллекторным электродвигателям, а второй — асинхронным трехфазным.
Корпус любых электродвигателей обычно чугунный или выполнен из сплава алюминия. Однотипные двигатели, не смотря на конструкцию корпуса производятся с одинаковыми установочными размерами и электрическими параметрами.
Работа электродвигателя базируется на принципах электромагнитной индукции. Магнитная и электрическая энергия создают электродвижущуюся силу в замкнутом контуре, проводящем ток. Это свойство заложено в работу любой электромашины.
На движущийся электроток в середине магнитного поля постоянно воздействует механическая сила, стремительно пытающаяся отклонить направление зарядов в перпендикулярной силовым магнитным линиям плоскости. Во время прохождения электротока по металлическому проводнику либо катушке, механическая сила норовит подвинуть или развернуть всю обмотку и каждый проводник тока.
Назначение и применение электродвигателейЭлектрические машины имеют много функций, они способны усиливать мощность электрических сигналов, преобразовывать величины напряжения либо переменный ток в постоянный и др. Для выполнения таких разных действий существуют многообразные типы электромашин. Двигатель представлят тип электрических машин, рассчитанных для преобразования энергии. А именно, этот вид устройств превращает электроэнергию в двигательную силу или механическую работу.
Он пользуется большим спросом во многих отраслях. Их широко используется в промышленности, на станках различного предназначения и в других установках. В машиностроении, к примеру, землеройных, грузоподъёмных машинах. Также они распространены в сферах народного хозяйства и бытовых приборах.
Классификация электродвигателейЭлектродвигатель, является разновидностью электромашин по:
- Специфике, создающегося вращательного момента:
— гистерезисные;
— магнитоэлектрические. - Строению крепления:
— с горизонтальным расположением вала;
— с вертикальным размещением вала. - Защите от действий внешней среды:
— защищённые;
— закрытые;
— взрывонепроницаемые.
В гистерезисных устройствах вращающий момент образуется путём перемагничивания ротора или гистерезиса (насыщения). Эти двигатели мало эксплуатируются в промышленности и не считаются традиционными. Востребованными являются магнитоэлектрические двигатели. Существует много модификаций этих двигателей.
Их разделяют на большие группы по типу протекающего тока:
- Постоянного тока.
- Переменного тока.
- Универсальные двигатели (работают на постоянном переменном токе).
С помощью двигателей постоянного тока создают регулируемые электрические приводы с высокими эксплуатационными и динамическими показателями.
Типы электродвигателей:
- С электромагнитами.
- С постоянными магнитами.
Группа электродвигателей, питание которых выполняется постоянным током, подразделяется на подвиды:
- Коллекторные. В этих электроприборах присутствует щёточно-коллекторный узел, обеспечивающий электрическое соединение неподвижной и вращающейся части двигателя. Устройства бывают с самовозбуждением и независимым возбуждением от постоянных магнитов и электромагнитов.
- Выделяют следующие виды самовозбуждения двигателей:
— параллельное;
— последовательное;
— смешанное. - Коллекторные устройства имеют несколько минусов:
— низкая надёжность приборов;
— щёточно-коллекторный узел довольно сложная в обслуживании составляющая часть магнитоэлектрического двигателя. - Безколлекторные (вентильные). Это двигатели с замкнутой системой, работающие по аналогичному принципу работы синхронных устройств. Оснащены датчиком положения ротора, преобразователем координат, а также инвертором силовым полупроводниковым преобразователем.
Эти машины выпускаются различных размеров от самых маленьких низковольтных до громадных размеров (в основном до мегаватта). Миниатюрными электродвигателями оснащены компьютеры, телефоны, игрушки, аккумуляторные электроинструменты и т.п.
Применение, плюсы и минусы электродвигателей постоянного токаЭлектромашины постоянного тока применяют в разных областях. Ими комплектуют подъёмно-транспортные, красочно-отделочные производственные машины, а также полимерное, бумажное производственное оборудование и т.д. Часто электрический двигатель этого типа встраивают в буровые установки, вспомогательные агрегаты экскаваторов и другие виды электротранспорта.
Преимущества электрических двигателей:
- Лёгкость в управлении и регулировании частоты вращения.
- Простота конструкции.
- Отменные пусковые свойства.
- Компактность.
- Возможность эксплуатации в разных режимах (двигательном и генераторном).
Минусы двигателей:
- Коллекторные двигатели требуют трудное профилактическое обслуживание щёточно-коллекторных узлов.
- Дороговизна производства.
- Коллекторные устройства имеют не большой срок службы из-за изнашивания самого коллектора.
В электродвигателях переменного тока электроток описывается по синусоидальному гармоническому закону, периодично меняющему свой знак (направление).
Статор этих устройств изготавливают из ферромагнитных пластинок, имеющих пазы для помещения в них витков обмотки с конфигурацией катушки.
Электродвигатели по принципу работы бывают синхронными и асинхронными. Главным их отличием является то, что скорость магнитодвижущей силы статора в синхронных приборах равна скорости вращения ротора, а в асинхронных двигателях эти скорости не совпадают, обычно ротор вращается медленнее поля.
Синхронный электродвигательИз-за одинакового (синхронного) вращения ротора с магнитным полем, аппараты именуют синхронными электродвигателями. Их подразделяют на подвиды:
- Реактивный.
- Шаговый.
- Реактивно-гистерезисный.
- С постоянными магнитами.
- С обмотками возбуждения.
- Вентильный реактивный.
- Гибридно-реактивный синхронный двигатель.
Большая часть компьютерной техники оснащена шаговыми электродвигателями. Преобразование энергии в этих устройствах основано на дискретно угловом передвижении ротора. Шаговый электродвигатель имеет высокую продуктивность, независящую от их мизерных размеров.
Достоинства синхронных двигателей:
- Стабильность частоты вращения, что не зависит от механических нагрузок на валу.
- Низкая чувствительность к скачкам напряжения.
- Могут выступать в роли генератора мощности.
- Снижают потребление мощности, предоставляемой электростанциями.
Недостатки в синхронных устройствах:
- Сложности с запуском.
- Сложность конструкции.
- Затруднения в регулировки частоты вращения.
Недостатки синхронного двигателя, делают более выгодным для использования электродвигатель асинхронного типа. Тем не менее, большинство синхронных двигателей из-за их работы с постоянной скоростью востребованы для установок в компрессоры, генераторы, насосы, а также крупные вентиляторы и пр. оборудование.
Асинхронный электродвигательСтатор асинхронных двигателей представляет распределённую двухфазную, трехфазную, реже многофазную обмотку. Ротор выполняют в виде цилиндра, используя медь, алюминий либо металл. В его пазы залиты либо запрессованные токопроводящие жилы к оси вращения под определённым углом. Они соединяются в одно целое на торцах ротора. Противоток возбуждается в роторе от переменного магнитного поля статора.
По конструктивным особенностям выделяют два вида асинхронных двигателей:
- С фазным ротором.
- С короткозамкнутым ротором.
В остальном конструкция приборов не имеет отличий, статор у них абсолютно одинаковый. По числу обмоток выделяют такие электродвигатели:
- Однофазные. Этот тип двигателей самостоятельно не запускается, ему требуется стартовый толчок. Для этого применяется пусковая обмотка либо фазосдвигающая цепь. Также приборы запускаются вручную.
- Двухфазные. В этих устройствах присутствуют две обмотки со смещёнными на угол фазами. В приборе возникает вращающееся магнитное поле, напряженность которого в полюсах одной обмотки нарастает и синхронно спадает в другой.
Двухфазный электродвигатель может самостоятельно запускаться, но с реверсом присутствуют сложности. Часто этот тип устройств подключают к однофазным сетям, включая вторую фазу через конденсатор. - Трехфазные. Достоинством этих типов электродвигателей является легкий реверс. Основные части двигателя – это статор с тремя обмотками и ротор. Позволяет плавно регулировать скорость ротора. Эти приборы довольно востребованы в промышленности и технике.
- Многофазные. Состоят эти устройства из встроенной многофазной обмотки в пазах статора на его внутренней поверхности. Эти двигатели гарантируют высокую надёжность при эксплуатации и считаются усовершенствованными моделями двигателей.
Асинхронные электрические двигатели значительно облегчают работу людей, поэтому они незаменимы во многих сферах.
Достоинствами этих приборов, которые сыграли роль в их популярности, являются следующие моменты:
- Простота производства.
- Высокая надёжность.
- Не нуждаются в преобразователях для включения в сеть.
- Небольшие расходы при эксплуатации.
Ко всему этому, можно добавить относительную стоимость асинхронных приборов. Но они также имеют и недостатки:
- Невысокий коэффициент мощности.
- Трудность в точной регулировке скорости.
- Маленький пусковой момент.
- Зависимость от напряжения сети.
Но благодаря питанию электродвигателя с помощью частотного преобразователя, некоторые недостатки устройств устраняются. Поэтому потребность асинхронных моторов не падает. Их применяют в приводах разных станков в областях металлообработки, деревообработки и пр. В них нуждаются ткацкие, швейные, землеройные, грузоподъёмные и другие виды машин, а также вентиляторы, насосы, центрифуги, разные электроинструменты и бытовые приборы.
Похожие темы:
Устройство и принцип работы электроинструмента
Содержание:
- 1. Коллекторный электродвигатель постоянного тока
- 1.1. Принцип действия
- 1.2. Недостатки
- 2. Бесколлекторный двигатель
- 3. Редуктор
- 3.1. Особенности редукторов
- 4. Устройства управления
- 5. Для безопасной работы
Двигатель, редуктор, устройства управления и детали для безопасной работы — вот основные узлы каждого электроинструмента. Для ручной машины важно, что бы она была как можно легче и меньше. Кроме того, от нее требуется высокая скорость, которую можно регулировать. Этим условиям отвечают двигатели постоянного тока. Они подразделяются на коллекторные и вентильные.
Коллекторный электродвигатель постоянного тока
Что бы понять, как электрическая энергия превращается в механическую, познакомимся с устройством двигателя. Его основные узлы: статор (индуктор), ротор (якорь) и примыкающий к нему щеточноколлекторный узел.
Статор — неподвижная стальная деталь, к которой прикрепляются главные и добавочные полюсы. Обмотка главных полюсов создает магнитное поле, а добавочная улучшает работу коллектора.
Вращающийся ротор устанавливается на валу. Он состоит из сердечника и обмотки. Ее концы соединяются с пластинами коллектора, к которому, в свою очередь, примыкают щетки – через них обмотка якоря соединяется с внешней цепью. Щетки занимают определенное положение по отношению к полюсам двигателя. В некоторых электроинструментах имеется поворотный щеткодержатель-траверса, благодаря ему положение щеток можно изменять. Это позволяет сохранить мощность при работе в режиме реверса. В остальных случаях вращение в обратном режиме включают электронные магнитные пускатели.
Принцип действия
Двигатель работает за счет электромагнитной индукции. При подаче напряжения на графитовые щетки, они замыкаются с ротором. По его обмотке проходит электрический ток. Так как ротор находится внутри магнитного поля статора, на него начинают действовать силы Ампера. На концах якоря они направлены в противоположные стороны, что создает крутящий момент. Ротор поворачивается на 180°. В этот момент крутящий момент становится равным нулю. Что бы вращение продолжалось необходимо переключить направление тока — провести коммутацию. По коллектору, который начал вращаться вместе с ротором, скользят щетки, в нужный момент они переходят с одной пластины на другую, меняя направление тока в обмотках ротора.
Частота вращения двигателя регулируется за счет изменения магнитного поля статора, которое в свою очередь генерируется током возбуждения двигателя. На этот ток можно повлиять реостатом, транзистором, т. е. любым устройством с активным сопротивлением. Таким образом, осуществляется электронная регулировка скорости.
Недостатки
Слабое место коллекторного двигателя — графитовые щетки, в процессе эксплуатации они истираются. При интенсивной нагрузке их приходится часто заменять. Кроме того, такой двигатель шумит и вибрирует во время работы, особенно на больших скоростях. Бороться с этими недостатками помогает использование в конструкциях качественных деталей и внешних антивибрационных элементов.
Бесколлекторный двигатель
Существует вид двигателей постоянного тока, в которых отсутствует щеточно-коллекторный узел. Ток в них изменяется с помощью электронных переключателей, что избавляет конструкцию от наличия щеток. Такие моторы называют вентильными. Принцип их работы аналогичен описанному выше. От коллекторных их отличает конструкция: магниты размещены на роторе, а обмотка на статоре.
Датчик углового положения ротора указывает электронному блоку, когда нужно менять направление тока. Единственный недостаток вентильного двигателя — дорогостоящие детали. По этой причине в ручных электроинструментах в основном используются коллекторные двигатели, с вентильным — лишь единичные модели: компании Makita и Hitachi предлагают аккумуляторные ударные шуруповерты, называя их инструментами будущего.
Редуктор
Механическую энергию, которую вырабатывает двигатель, нужно передать на рабочий орган машины (шпиндель). Эту функцию выполняет редуктор. Часто его называют понижающим. Скорость вращения входного вала высокая, механическая передача (одна или несколько) преобразует ее так, что на выходном валу получается меньшее число оборотов, но высокий крутящий момент.
В ручных машинах применяют разнообразные виды механических передач: зубчатая, ременная, цепная, планетарная. В большинстве случаев на выходе получается вращение. Но есть инструменты, в которых этот вид движения преобразуется в другой.
Ударный механизм перфоратора работает следующим образом. На валу установлен «пьяный» подшипник — качающийся привод, которой преобразует вращательное движение от двигателя в поступательное – цилиндра. В пространстве между цилиндром, поршнем и бойком, находится воздух. Он сжимается и заставляет поршень перемещаться сначала вперед к бойку, а затем возвращает его в исходное положение.
Редуктор электролобзика преобразует вращение вала двигателя в возвратно-поступательное движение ползуна. Расположенный вертикально ползун перемещает пилку вниз и вверх. Пилка опирается на опорный ролик. Наличие функции маятникового хода означает, что опорный ролик и вилка, на которой он держится, могут отклоняться назад. В результате пилка, кроме основного, совершает движение вперед и назад. Это увеличивает скорость прямолинейного реза. Ступени маятникового хода задаются степенью отклонения ролика.
В вибрационных шлифмашинах эксцентрик, установленный на валу, так преобразует вращательное движение, что подошва всего лишь колеблется с маленькой амплитудой. В эксцентриковых шлифовальных машинах вращательное движение рабочего органа сохраняется, но эксцентрик добавляет ему колебания. Такие преобразования позволяют выполнять с помощью этих инструментов тонкую шлифовку.
Особенности редукторов
Для пользователя имеет значение, из каких деталей изготовлен редуктор, от этого зависит его надежность и срок службы всего электроинструмента. В моделях бытового класса часто используются шестерни из пластмассы, в профессиональных — редуктор полностью металлический. Преимуществом считается, если и корпус то же выполнен из металла. В этом случае инструмент лучше выдерживает большие нагрузки и удары.
Важной функцией, которую может выполнять редуктор, является ступенчатое изменение частоты вращения выходного вала. Она доступна на отдельных моделях дрелей, шуруповертов. Механическое переключение скоростей позволяет работать с меньшей скоростью и большим крутящим моментом на первой передаче и с более высоким числом оборотов – на второй. Если сравнить технические характеристики в цифрах, то можно сразу заметить, что инструменты с двухскоростным (трехскоростные встречаются редко) редуктором отличаются большим числом оборотов по сравнению с обычными моделями, в которых обороты регулируются только электроникой. Эта особенность обеспечивает высокую производительность и оптимальный подбор режима работы.
Устройства управления
Для питания двигателя в электроинструментах используются различные схемы, в том числе микропроцессорные электроприводы. Обязательным элементом любой системы является выпрямитель. Он преобразует переменный ток сети в постоянный, который подается на электродвигатель. В аккумуляторных инструментах, которые питаются от батарей, выпрямитель не требуется.
Скорость вращения регулирует преобразователь частоты. Самый простой его вариант — это несколько реле, с помощью которых число оборотов можно установить вручную. В систему так же могут входить магнитные пускатели с кнопкой для изменения направления вращения двигателя (функция реверса). Устройство управления двигателем размещают под рукояткой или вблизи нее, где на корпус выводятся курок-выключатель, колесико регулировки скорости, кнопка реверса.
Для безопасной работы
К ручным инструментам предъявляются особые требования, связанные с безопасностью работы. Электропроводящие детали покрывают специальным материалом для защиты пользователя от поражения током. Многие производители, кроме основной изоляции, на случай ее повреждения, применяют дополнительную, получая, таким образом, двойную. Остальные защитные устройства, такие как муфты, фиксаторы применяются в зависимости от вида инструмента.
Двигатели постоянного тока| Принцип работы | Ресурсы для инженеров
Электродвигатели, работающие на электромагнетизме. Однако существуют и другие типы двигателей, в которых используются электростатические силы или пьезоэлектрический эффект. В случае двигателя PMDC (постоянного магнита постоянного тока) движение создается электромагнитом (якорем), взаимодействующим с магнитом с фиксированным полем (корпус в сборе).
В щеточном двигателе электрический ток протекает через клеммы двигателя в узле торцевой крышки, который входит в контакт с коммутатором в узле якоря через угольные щетки или щеточные листы.Электрический ток питает катушки, создавая магнитное поле, заставляющее якорь вращаться, когда он взаимодействует с магнитами, заключенными в корпус в сборе. Правило левой руки Флемминга помогает определить направление силы, тока и магнитного потока.
В бесщеточном двигателе, когда электричество подается на вывод двигателя, ток течет через фиксированное поле статора и взаимодействует с движущимся постоянным магнитом или движущимся индуцированным магнитным полем внутри ротора / якоря.После того, как движение и силовая нагрузка будут удовлетворены доступным источником тока, он возвращается обратно к источнику, выходящему из двигателя.
Ключевые элементы, взаимодействующие для создания движения
Магнитный поток – Двигатель может иметь катушку с фиксированной обмоткой или статор с постоянным магнитом и якорь с подвижной обмоткой или ротор с постоянными магнитами, которые будут иметь взаимодействующие поля магнитного потока для создания силы и движения.
Сила – Величина тока, протекающего через электромагнитное поле, пропорциональна величине силы взаимодействующего электромагнитного поля, необходимой для достижения противоположной рабочей нагрузки.Помимо силы и движения, необходимых для устройства, необходимо учитывать любую потерю эффективности при преобразовании электроэнергии в механическую работу (ватты).
Обзор шагового двигателя
Что такое шаговый двигатель
Шаговые двигатели работают иначе, чем другие двигатели постоянного тока, которые просто вращаются при подаче напряжения. Вращательный шаговый двигатель – это электромеханическое устройство, которое может разделить один полный оборот (360 °) на большое количество шагов вращения. Шаговые двигатели управляются электроникой и не требуют дорогостоящих устройств обратной связи.Линейный шаговый двигатель подобен вращающемуся двигателю, за исключением того, что вал движется линейно или продольно. Оба типа имеют две схемы обмотки для своих электромагнитных катушек: униполярную и биполярную. Униполярный означает, что каждый конец катушки имеет одну полярность. Рекомендуемый стабилитрон используется для обеспечения быстрого спада тока в отключенной катушке. Это приведет к увеличению крутящего момента двигателя, особенно на более высоких частотах.
Биполярный означает, что каждый конец катушки имеет обе полярности.Катушка будет положительной и отрицательной во время каждого цикла движения. Поскольку каждая катушка используется полностью, двигатель имеет более высокий крутящий момент по сравнению с униполярной катушкой. Биполярный драйвер может включать в себя возможность управления постоянным током, называемую приводом прерывателя. Это обеспечит увеличенный выходной крутящий момент на более высоких частотах и снизит влияние колебаний температуры и напряжения питания.
Основы шагового двигателя
Шаговый двигатель PM или «консервная банка» – это недорогое решение для ваших приложений позиционирования с типичным углом шага 7.5 ° – 15 °. Меньшие углы шага можно получить с помощью Microstepping. Вал двигателя перемещается с определенным шагом при подаче электрических управляющих импульсов. Текущая полярность и частота подаваемых импульсов определяют направление и скорость движения вала.
Одним из наиболее значительных преимуществ шагового двигателя является его способность точно регулироваться в системе с разомкнутым контуром. Управление без обратной связи означает, что обратная связь о положении вала не требуется.Этот тип управления устраняет необходимость в дорогостоящих устройствах обратной связи, просто отслеживая входные ступенчатые импульсы. Шаговый двигатель – хороший выбор, когда требуется контролируемое движение. Они рекомендуются в приложениях, где необходимо контролировать угол поворота, скорость, положение и синхронизм. Возможности фиксации, удержания, втягивания и извлечения крутящего момента, скорости (об / мин) и шагов на оборот (угол шага) характеризуют шаговый двигатель.
Момент фиксации – определяет максимальный крутящий момент, который может быть приложен к обесточенному двигателю, не вызывая вращения двигателя.
Удерживающий момент – определяет максимальный крутящий момент, с которым двигатель, находящийся под напряжением, может быть нагружен, не вызывая вращательного движения.
Pull-In – производительность определяет способность двигателя запускаться или останавливаться. Это максимальная частота, при которой двигатель может запускаться или останавливаться мгновенно с приложенной нагрузкой без потери синхронизации.
Pull-Out определяет максимальный крутящий момент при применении рампы ускорения / замедления без потери шагов.Он определяет максимальную частоту, на которой двигатель может работать без потери синхронизма.
Наш шаговый двигатель можно комбинировать с полной линейкой редукторов для увеличения крутящего момента и снижения скорости.
Электродвигатель– Принципы работы трехфазного двигателя – роторный, полевой, синхронный и магнитный
Основное различие между двигателями переменного и постоянного тока заключается в том, что магнитное поле, создаваемое статором, вращается в корпусе переменного тока. Через клеммы вводятся три электрические фазы, каждая фаза питает отдельный полюс поля.Когда каждая фаза достигает своего максимального тока, магнитное поле на этом полюсе достигает максимального значения. По мере уменьшения тока уменьшается и магнитное поле. Поскольку каждая фаза достигает своего максимума в разное время в пределах цикла тока, тот полюс поля, магнитное поле которого является наибольшим, постоянно изменяется между тремя полюсами, в результате чего магнитное поле, видимое ротором, вращается. Скорость вращения магнитного поля, известная как синхронная скорость, зависит от частоты источника питания и количества полюсов, создаваемых обмоткой статора.Для стандартного источника питания 60 Гц, используемого в США, максимальная синхронная скорость составляет 3600 об / мин.
В трехфазном асинхронном двигателе обмотки ротора не подключены к источнику питания, а по сути являются короткозамкнутыми. Самый распространенный тип обмотки ротора, обмотка с короткозамкнутым ротором, очень напоминает ходовое колесо, используемое в клетках для домашних животных песчанок . Когда двигатель первоначально включен, а ротор неподвижен, проводники ротора испытывают изменяющееся магнитное поле, распространяющееся с синхронной скоростью.Согласно закону Фарадея, эта ситуация приводит к индукции токов вокруг обмоток ротора; величина этого тока зависит от импеданса обмоток ротора. Поскольку условия для работы двигателя теперь выполнены, то есть проводники с током находятся в магнитном поле, ротор испытывает крутящий момент и начинает вращаться. Ротор никогда не может вращаться с синхронной скоростью, потому что не будет относительного движения между магнитным полем и обмотками ротора, и ток не может быть индуцирован.Асинхронный двигатель имеет высокий пусковой момент.
В двигателях с короткозамкнутым ротором скорость двигателя определяется нагрузкой, которую он передает, и числом полюсов, создающих магнитное поле в статоре. Если некоторые полюса включаются или выключаются, скорость двигателя можно регулировать с приращением. В двигателях с фазным ротором сопротивление обмоток ротора может быть изменено извне, что изменяет ток в обмотках и, таким образом, обеспечивает непрерывное регулирование скорости.
Трехфазные синхронные двигатели сильно отличаются от асинхронных двигателей.В синхронном двигателе ротор использует катушку под напряжением постоянного тока для создания постоянного магнитного поля. После того, как ротор приближается к синхронной скорости двигателя, северный (южный) полюс магнита ротора блокируется с южным (северным) полюсом вращающегося поля статора, и ротор вращается с синхронной скоростью. Ротор синхронного двигателя обычно включает в себя обмотку с короткозамкнутым ротором, которая используется для запуска вращения двигателя до подачи питания на катушку постоянного тока. Беличья клетка не действует на синхронных скоростях по причине, описанной выше.
Однофазные асинхронные и синхронные двигатели, используемые в большинстве бытовых ситуаций, работают по принципам, аналогичным принципам, описанным для трехфазных двигателей. Однако для создания пусковых моментов необходимо внести различные модификации, поскольку одна фаза не будет генерировать только вращающееся магнитное поле. Следовательно, в асинхронных двигателях используются конструкции с расщепленной фазой, пуском конденсатора , или заштрихованными полюсами. Синхронные однофазные двигатели, используемые для таймеров, часов, магнитофонов и т. Д., полагайтесь на конструкции сопротивления или гистерезиса.
Принцип электродвигателя – HiSoUR – Hi So You Are
🔊 АудиочтениеЭлектродвигатель – это электромеханический преобразователь (электрическая машина), преобразующий электрическую энергию в механическую. В обычных электродвигателях генерируются магнитные поля в катушках с токонесущими проводниками, силы взаимного притяжения и отталкивания которых реализуются в движении. Таким образом, электродвигатель является аналогом очень похожего по конструкции генератора, который преобразует мощность двигателя в электрическую.Электродвигатели обычно генерируют вращательные движения, но их также можно использовать для поступательных движений (линейный привод). Электродвигатели используются для привода многих видов оборудования, машин и транспортных средств.
Принцип действия
Электродвигатели – это устройства, преобразующие электрическую энергию в механическую. Средством преобразования энергии в электродвигателях является магнитное поле. Существуют разные типы электродвигателей, и каждый тип имеет разные компоненты, структура которых определяет взаимодействие электрических и магнитных потоков, которые вызывают силу или крутящий момент двигателя.
Фундаментальный принцип, который описывает, как сила вызывается взаимодействием точечного электрического заряда q в электрическом и магнитном полях, – это закон Лоренца:
где:
q: точечный электрический заряд
E: электрическое поле
v: скорость частицы
B: плотность магнитного поля
В случае чисто электрического поля выражение уравнения сводится к:
Сила в этом случае определяется только зарядом q и электрическим полем E.Это кулоновская сила, которая действует вдоль проводника, порождающего электрический поток, например, в катушках статора асинхронных машин или в роторе двигателей постоянного тока.
В случае чисто магнитного поля:
Сила определяется зарядом, плотностью магнитного поля B и скоростью груза v. Эта сила перпендикулярна магнитному полю и направлению скорости груза. Обычно в движении находится много грузов, поэтому выражение удобно переписать в терминах плотности заряда Fv (сила на единицу объема):
Для продукта это известно как плотность тока J (ампер на квадратный метр):
Тогда полученное выражение описывает силу, создаваемую взаимодействием тока с магнитным полем:
Это основной принцип, объясняющий, как возникают силы в электромеханических системах, таких как электродвигатели.Однако полное описание каждого типа электродвигателя зависит от его компонентов и конструкции.
Линейный двигатель
Линейный двигатель – это, по сути, любой электродвигатель, который был «раскручен» так, что вместо создания крутящего момента (вращения) он создает прямолинейную силу по всей своей длине.
Линейные двигатели чаще всего представляют собой асинхронные двигатели или шаговые двигатели. Линейные двигатели обычно используются во многих американских горках, где быстрое движение безмоторного железнодорожного вагона контролируется рельсом.Они также используются в поездах на магнитной подвеске, где поезд «летает» над землей. В меньшем масштабе перьевой плоттер HP 7225A 1978 года использовал два линейных шаговых двигателя для перемещения пера по осям X и Y.
Электромагнетизм
Сила и крутящий момент
Основной целью подавляющего большинства электродвигателей в мире является электромагнитное индуцирование относительного движения в воздушном зазоре между статором и ротором для создания полезного крутящего момента или линейной силы.
Согласно закону силы Лоренца сила проводника обмотки может быть просто выражена как:
или более широко, для работы с проводниками любой геометрии:
Наиболее общие подходы к вычислению сил в двигателях используют тензоры.
Мощность
Где об / мин – частота вращения вала, а T – крутящий момент, механическая выходная мощность двигателя Pem определяется выражением
в британских единицах с T, выраженным в фут-фунтах,
(лошадиные силы) и,
в единицах СИ с угловой скоростью вала, выраженной в радианах в секунду, и T, выраженным в ньютон-метрах,
(Вт).
Для линейного двигателя с силой F, выраженной в ньютонах, и скоростью v, выраженной в метрах в секунду,
(Вт).
В асинхронном или асинхронном двигателе соотношение между скоростью двигателя и мощностью воздушного зазора без учета скин-эффекта определяется следующим образом:
, где
Rr – сопротивление ротора
I r 2 – квадрат индуцированного тока в роторе
s – скольжение двигателя; я.е., разница между синхронной скоростью и скоростью скольжения, которая обеспечивает относительное движение, необходимое для индукции тока в роторе.
Задний ЭДС
Поскольку обмотки якоря двигателя постоянного тока или универсального двигателя движутся через магнитное поле, в них возникает индуцированное напряжение. Это напряжение имеет тенденцию противодействовать напряжению питания двигателя и поэтому называется «противоэлектродвижущей силой (ЭДС)». Напряжение пропорционально скорости вращения двигателя. Обратная ЭДС двигателя плюс падение напряжения на внутреннем сопротивлении обмотки и щетках должны равняться напряжению на щетках.Это обеспечивает основной механизм регулирования скорости в двигателе постоянного тока. Если механическая нагрузка увеличивается, двигатель замедляется; в результате возникает ЭДС нижней части спины, и больше тока потребляется от источника питания. Этот увеличенный ток обеспечивает дополнительный крутящий момент для уравновешивания новой нагрузки.
В машинах переменного тока иногда полезно учитывать источник обратной ЭДС внутри машины; Например, это особенно важно при точном регулировании скорости асинхронных двигателей на частотно-регулируемых приводах.
Потери
Потери электродвигателя в основном связаны с резистивными потерями в обмотках, потерями в сердечнике и механическими потерями в подшипниках, а также имеют место аэродинамические потери, особенно при наличии охлаждающих вентиляторов.
Потери также возникают при коммутации, искрообразовании в механических коммутаторах и электронных коммутаторах, а также при рассеивании тепла.
КПД
Для расчета КПД двигателя механическая выходная мощность делится на входную электрическую:
,
где – эффективность преобразования энергии, – входная электрическая мощность и – механическая выходная мощность:
где – входное напряжение, – входной ток, T – выходной крутящий момент и – выходная угловая скорость.Можно аналитически вывести точку максимальной эффективности. Обычно он составляет менее 1/2 крутящего момента при остановке.
Различные регулирующие органы во многих странах приняли и внедрили законы, поощряющие производство и использование электродвигателей с более высоким КПД.
Фактор качества
Эрик Лэйтуэйт предложил метрику для определения «качества» электродвигателя:
Где:
– коэффициент качества (коэффициенты выше 1, вероятно, будут эффективными)
– площади поперечного сечения магнитной и электрической цепи
– длины магнитной и электрической цепей
– проницаемость сердечника
– угловая частота двигатель приводится в движение на
Из этого он показал, что наиболее эффективные двигатели, вероятно, будут иметь относительно большие магнитные полюса.Однако это уравнение напрямую относится только к двигателям без ПМ.
Рабочие параметры
Допустимый крутящий момент типов двигателей
Все электромагнитные двигатели, включая упомянутые здесь типы, получают крутящий момент из векторного произведения взаимодействующих полей. Для расчета крутящего момента необходимо знать поля в воздушном зазоре. После того, как они были установлены с помощью математического анализа с использованием FEA или других инструментов, крутящий момент может быть вычислен как интеграл всех векторов силы, умноженный на радиус каждого вектора.Ток, протекающий в обмотке, создает поля, и для двигателя, использующего магнитный материал, поле не линейно пропорционально току. Это затрудняет расчет, но компьютер может выполнить множество необходимых расчетов.
Как только это будет сделано, число, связывающее ток с крутящим моментом, можно использовать в качестве полезного параметра для выбора двигателя. Максимальный крутящий момент двигателя будет зависеть от максимального тока, хотя обычно его можно использовать только до тех пор, пока не будут преобладать тепловые соображения.
При оптимальном проектировании в пределах заданного ограничения по насыщению сердечника и для заданного активного тока (т. Е. Тока крутящего момента), напряжения, числа пар полюсов, частоты возбуждения (т. Е. Синхронной скорости) и плотности магнитного потока в воздушном зазоре, все категории электрических двигатели или генераторы будут демонстрировать практически одинаковый максимальный постоянный крутящий момент на валу (то есть рабочий крутящий момент) в пределах заданной области воздушного зазора с пазами обмотки и глубиной задней части, которая определяет физический размер электромагнитного сердечника.Для некоторых приложений требуются всплески крутящего момента, превышающие максимальный рабочий крутящий момент, например, короткие всплески крутящего момента для ускорения электромобиля с места. Всегда ограниченная насыщением магнитного сердечника или безопасным повышением рабочей температуры и напряжения, способность выдерживать скачки крутящего момента сверх максимального рабочего крутящего момента значительно различается между категориями электродвигателей или генераторов.
Способность к скачкам крутящего момента не следует путать с возможностью ослабления поля. Ослабление поля позволяет электрической машине работать за пределами расчетной частоты возбуждения.Ослабление поля выполняется, когда максимальная скорость не может быть достигнута путем увеличения приложенного напряжения. Это относится только к двигателям с полями, управляемыми током, и поэтому не может быть достигнуто с двигателями с постоянными магнитами.
Электрические машины без трансформаторной топологии схемы, такие как WRSM или PMSM, не могут реализовать всплески крутящего момента, превышающие максимальный расчетный крутящий момент, без насыщения магнитного сердечника и без того, чтобы любое увеличение тока было бесполезным. Кроме того, узел постоянного магнита PMSM может быть непоправимо поврежден, если будут предприняты попытки увеличения крутящего момента, превышающего максимально допустимый рабочий крутящий момент.
Электрические машины с топологией трансформаторной схемы, такие как асинхронные машины, индукционные электрические машины с двойным питанием, а также асинхронные или синхронные машины с двойным питанием с фазным ротором (WRDF), демонстрируют очень высокие всплески крутящего момента, потому что наведенный ЭДС активный ток на обе стороны трансформатора противостоят друг другу и, таким образом, не вносят никакого вклада в плотность потока магнитного сердечника трансформатора, что в противном случае привело бы к насыщению сердечника.
Электрические машины, основанные на индукционных или асинхронных принципах, закорачивают один порт цепи трансформатора, и в результате реактивное сопротивление цепи трансформатора становится доминирующим по мере увеличения скольжения, что ограничивает величину активного (т.е.е., реальный) ток. Тем не менее, всплески крутящего момента, которые в два-три раза превышают максимальный расчетный крутящий момент, возможны.
Бесщеточная машина с синхронным двойным питанием с фазным ротором (BWRSDF) – единственная электрическая машина с действительно двухпортовой топологией трансформаторной схемы (т. Е. Оба порта возбуждаются независимо без короткозамкнутого порта). Топология схемы с двумя портами трансформатора, как известно, нестабильна и требует многофазного узла контактного кольца-щетки для передачи ограниченной мощности на обмотку ротора.Если бы были доступны прецизионные средства для мгновенного управления углом крутящего момента и скольжением для синхронной работы во время движения или генерации, одновременно обеспечивая бесщеточную мощность для обмотки ротора, активный ток машины BWRSDF не зависел бы от реактивного сопротивления цепи трансформатора и всплески крутящего момента, значительно превышающие максимальный рабочий крутящий момент и намного превосходящие практические возможности любого другого типа электрической машины, были бы возможны.Были рассчитаны всплески крутящего момента, превышающие рабочий крутящий момент в восемь раз.
Постоянная плотность крутящего момента
Постоянная плотность крутящего момента обычных электрических машин определяется размером области воздушного зазора и глубиной задней части, которые определяются номинальной мощностью комплекта обмотки якоря, скоростью машины, и достижимая плотность потока в воздушном зазоре до насыщения сердечника. Несмотря на высокую коэрцитивную силу неодимовых или самариево-кобальтовых постоянных магнитов, постоянная плотность крутящего момента практически одинакова для электрических машин с оптимально спроектированными наборами обмоток якоря.Постоянная плотность крутящего момента относится к способу охлаждения и допустимому периоду эксплуатации до разрушения из-за перегрева обмоток или повреждения постоянного магнита.
Другие источники утверждают, что различные топологии электронных машин имеют разную плотность крутящего момента. Один источник показывает следующее:
| Тип электрической машины | Удельная плотность крутящего момента (Нм / кг) |
|---|---|
| SPM – бесщеточный переменный ток, токопроводимость 180 ° | 1,0 |
| SPM – бесщеточный переменный ток, токопроводимость 120 ° | 0.9-1,15 |
| ИМ, асинхронная машина | 0,7–1,0 |
| IPM, машина с внутренним постоянным магнитом | 0,6-0,8 |
| VRM, машина двойного вылета | 0,7–1,0 |
где – удельная плотность крутящего момента нормирована на 1,0 для SPM – бесщеточный переменный ток, токопроводимость 180 °, SPM – это машина с поверхностным постоянным магнитом.
Плотность крутящего момента для электродвигателей с жидкостным охлаждением примерно в четыре раза больше, чем для электродвигателей с воздушным охлаждением.
Источник, сравнивающий постоянный ток (DC), асинхронные двигатели (IM), синхронные двигатели с постоянными магнитами (PMSM) и реактивные реактивные двигатели (SRM), показал:
| Характеристика | постоянного тока | IM | PMSM | SRM |
|---|---|---|---|---|
| Плотность крутящего момента | 3 | 3,5 | 5 | 4 |
| Плотность мощности | 3 | 4 | 5 | 3.5 |
Другой источник отмечает, что синхронные машины с постоянными магнитами мощностью до 1 МВт имеют значительно более высокую плотность крутящего момента, чем асинхронные машины.
Постоянная плотность мощности
Постоянная плотность мощности определяется произведением постоянной плотности крутящего момента и диапазона скорости постоянного крутящего момента электрической машины.
Специальные магнитные двигатели
Поворотный
Двигатель с ротором без сердечника или без сердечника.
Ни в одном из описанных выше двигателей не требуется, чтобы железные (стальные) части ротора действительно вращались.Если магнитомягкий материал ротора выполнен в виде цилиндра, то (за исключением эффекта гистерезиса) крутящий момент действует только на обмотки электромагнитов. Преимущество этого факта – двигатель постоянного тока без сердечника или железа, специализированная форма двигателя постоянного тока с постоянными магнитами. Эти двигатели, оптимизированные для быстрого разгона, имеют ротор без железного сердечника. Ротор может иметь форму цилиндра, заполненного обмоткой, или самонесущей конструкции, содержащей только магнитный провод и связующий материал.Ротор может помещаться внутри магнитов статора; магнитомягкий неподвижный цилиндр внутри ротора обеспечивает обратный путь для магнитного потока статора. Во втором устройстве корзина обмотки ротора окружает магниты статора. В этой конструкции ротор помещается внутри магнитомягкого цилиндра, который может служить корпусом для двигателя, а также обеспечивает обратный путь для магнитного потока.
Поскольку ротор намного легче по весу (массе), чем обычный ротор, сформированный из медных обмоток на стальных пластинах, ротор может ускоряться намного быстрее, часто достигая механической постоянной времени менее одной мс.Это особенно верно, если в обмотках используется алюминий, а не более тяжелая медь. Но поскольку в роторе нет металлической массы, которая могла бы служить радиатором, даже небольшие двигатели без сердечника часто должны охлаждаться принудительным воздухом. Перегрев может быть проблемой для двигателей постоянного тока без сердечника. Современное программное обеспечение, такое как Motor-CAD, может помочь повысить тепловой КПД двигателей еще на стадии проектирования.
Среди этих типов есть типы дискового ротора, более подробно описанные в следующем разделе.
Виброзвонок сотовых телефонов иногда генерируется крошечными цилиндрическими типами постоянного магнита, но есть также дискообразные типы, которые имеют тонкий многополярный дисковый магнит поля и намеренно несбалансированную конструкцию ротора из формованного пластика с двумя соединенными катушками без сердечника. . Металлические щетки и плоский коммутатор переключают питание на катушки ротора.
Соответствующие приводы с ограниченным ходом не имеют сердечника и катушки, размещенной между полюсами тонких постоянных магнитов с высокой магнитной индукцией.Это быстрые позиционеры головки для жестких дисков («жестких дисков»). Хотя современный дизайн значительно отличается от громкоговорителей, он все еще свободно (и неправильно) называется структурой «звуковой катушки», потому что некоторые более ранние головки жестких дисков двигались по прямым линиям и имели структуру привода, очень похожую на что из громкоговорителя.
Двигатель с цилиндрическим или осевым ротором.
Якорь с печатным рисунком или двигатель с осевым ротором имеет обмотки в форме диска, перемещающегося между группами магнитов с большим магнитным потоком.Магниты расположены по кругу, обращенному к ротору, с промежутком между ними, образуя осевой воздушный зазор. Эта конструкция широко известна как двигатель-блинчик из-за ее плоского профиля. С момента своего создания у технологии было много торговых марок, таких как ServoDisc.
Якорь с печатным рисунком (первоначально сформированный на печатной плате) в двигателе с печатным рисунком якоря изготовлен из перфорированных медных листов, которые ламинированы вместе с использованием современных композитных материалов, чтобы сформировать тонкий жесткий диск. Печатный якорь имеет уникальную конструкцию в мире щеточных двигателей, поскольку он не имеет отдельного кольцевого коммутатора.Щетки движутся непосредственно по поверхности якоря, что делает всю конструкцию очень компактной.
Альтернативный метод производства заключается в использовании намотанного медного провода, уложенного плоско с центральным обычным коммутатором, в форме цветка и лепестка. Обмотки обычно стабилизируются электрическими системами заливки эпоксидной смолой. Это эпоксидные смолы с наполнителем, которые имеют умеренную смешанную вязкость и длительное время гелеобразования. Они отличаются низкой усадкой и низким экзотермическим эффектом и, как правило, признаны UL 1446 в качестве заливочного компаунда с изоляцией до 180 ° C, класс H.
Уникальным преимуществом двигателей постоянного тока без железа является отсутствие зубцов (изменения крутящего момента, вызванные изменением притяжения между железом и магнитами). Паразитные вихревые токи не могут образовываться в роторе, поскольку он полностью не содержит железа, хотя железные роторы являются слоистыми. Это может значительно повысить эффективность, но контроллеры с регулируемой скоростью должны использовать более высокую частоту переключения (> 40 кГц) или постоянный ток из-за уменьшения электромагнитной индукции.
Изначально эти двигатели были изобретены для привода приводов магнитных лентопротяжных устройств, где минимальное время для достижения рабочей скорости и минимальный тормозной путь были критическими.Блинные двигатели широко используются в высокопроизводительных сервоуправляемых системах, роботизированных системах, промышленной автоматизации и медицинских устройствах. Из-за разнообразия конструкций, доступных в настоящее время, технология используется в приложениях от высокотемпературных военных до недорогих насосов и базовых сервоприводов.
Другой подход (Magnax) заключается в использовании одного статора, зажатого между двумя роторами. Одна такая конструкция обеспечивает пиковую мощность 15 кВт / кг, постоянную мощность около 7,5 кВт / кг. Этот двигатель с осевым потоком без ярма обеспечивает более короткий путь потока, удерживая магниты дальше от оси.Конструкция позволяет иметь нулевой вылет обмотки; Активны 100 процентов обмоток. Это усиливается за счет использования медного провода прямоугольного сечения. Двигатели можно штабелировать для параллельной работы. Нестабильность сводится к минимуму за счет того, что два диска ротора прикладывают равные и противоположные силы к диску статора. Роторы напрямую соединены друг с другом через кольцо вала, что нейтрализует магнитные силы.
Размеры двигателейMagnax варьируются от 15 до 5,4 метра (5,9–17 футов 8,6 дюйма) в диаметре.
Серводвигатель
Серводвигатель – это двигатель, очень часто продаваемый в виде готового модуля, который используется в системе управления положением или скоростью с обратной связью. Серводвигатели используются в таких приложениях, как станки, перьевые плоттеры и другие технологические системы. Двигатели, предназначенные для использования в сервомеханизмах, должны иметь хорошо задокументированные характеристики скорости, крутящего момента и мощности. Кривая зависимости скорости от крутящего момента очень важна и является высоким соотношением для серводвигателя. Также важны характеристики динамического отклика, такие как индуктивность обмотки и инерция ротора; эти факторы ограничивают общую производительность контура сервомеханизма.В больших, мощных, но медленно реагирующих сервоконтурах могут использоваться обычные двигатели переменного или постоянного тока и приводные системы с обратной связью по положению или скорости на двигателе. Поскольку требования к динамическому отклику возрастают, используются более специализированные конструкции двигателей, такие как двигатели без сердечника. Превосходные характеристики плотности мощности и ускорения двигателей переменного тока по сравнению с двигателями постоянного тока, как правило, благоприятствуют применению синхронных двигателей с постоянными магнитами, BLDC, индукционных приводов и приводов SRM.
Сервосистема отличается от некоторых приложений с шаговыми двигателями тем, что обратная связь по положению является непрерывной, пока двигатель работает.Шаговая система по своей сути работает с разомкнутым контуром – полагаясь на двигатель, который не «пропускает шаги» для кратковременной точности – с любой обратной связью, такой как «исходный» переключатель или датчик положения, являющиеся внешними по отношению к двигательной системе. Например, когда запускается типичный компьютерный принтер с точечной матрицей, его контроллер заставляет шаговый двигатель печатающей головки приводиться к левому пределу, где датчик положения определяет исходное положение и останавливает шаг. Пока питание включено, двунаправленный счетчик в микропроцессоре принтера отслеживает положение печатающей головки.
Шаговый двигатель
Шаговый двигатель – это тип двигателя, который часто используется, когда требуется точное вращение. В шаговом двигателе внутренний ротор, содержащий постоянные магниты, или магнитно-мягкий ротор с явными полюсами управляется набором внешних магнитов, которые переключаются электронно. Шаговый двигатель также можно рассматривать как нечто среднее между электродвигателем постоянного тока и вращающимся соленоидом. Поскольку каждая катушка поочередно получает питание, ротор выравнивается с магнитным полем, создаваемым обмоткой возбуждения под напряжением.В отличие от синхронного двигателя, шаговый двигатель не может вращаться непрерывно; вместо этого он «шагает» – запускается и затем быстро останавливается – от одного положения к другому, поскольку обмотки возбуждения последовательно включаются и отключаются. В зависимости от последовательности, ротор может вращаться вперед или назад, и он может произвольно менять направление, останавливаться, ускоряться или замедляться в любое время.
Простые драйверы шаговых двигателей полностью включают или полностью обесточивают обмотки возбуждения, приводя ротор к «зубчатой передаче» в ограниченное количество положений; более сложные драйверы могут пропорционально управлять мощностью обмоток возбуждения, позволяя роторам располагаться между точками зубчатых колес и, таким образом, вращаться чрезвычайно плавно.Этот режим работы часто называют микрошагом. Шаговые двигатели с компьютерным управлением – одна из самых универсальных форм систем позиционирования, особенно когда они являются частью цифровой системы с сервоуправлением.
Шаговые двигателимогут легко поворачиваться на определенный угол дискретными шагами, и, следовательно, шаговые двигатели используются для позиционирования головки чтения / записи в дисководах компьютерных гибких дисков. Они использовались для той же цели в компьютерных дисковых накопителях до гигабайтной эры, где точность и скорость, которые они предлагали, были достаточными для правильного позиционирования головки чтения / записи жесткого диска.По мере увеличения плотности накопителей, ограничения точности и скорости шаговых двигателей сделали их устаревшими для жестких дисков – ограничение точности сделало их непригодными для использования, а ограничение скорости сделало их неконкурентоспособными – таким образом, в новых жестких дисках используются системы привода головки на основе звуковой катушки. (Термин «звуковая катушка» в этой связи является историческим; он относится к структуре в типичном (конусном) громкоговорителе. Эта структура некоторое время использовалась для размещения головок. Современные приводы имеют поворотное крепление катушки; катушка качается вперед и назад, что-то вроде лопасти вращающегося вентилятора.Тем не менее, подобно звуковой катушке, современные проводники катушки исполнительного механизма (магнитный провод) движутся перпендикулярно магнитным силовым линиям.)
Шаговые двигатели были и до сих пор часто используются в компьютерных принтерах, оптических сканерах и цифровых копировальных аппаратах для перемещения оптического сканирующего элемента, каретки печатающей головки (матричных и струйных принтеров), а также валика или подающих роликов. Точно так же многие компьютерные плоттеры (которые с начала 1990-х были заменены широкоформатными струйными и лазерными принтерами) использовали роторные шаговые двигатели для перемещения пера и валика; типичными альтернативами здесь были либо линейные шаговые двигатели, либо серводвигатели с аналоговыми системами управления с обратной связью.
Так называемые кварцевые аналоговые наручные часы содержат самые маленькие обычные шаговые двигатели; у них одна катушка, они потребляют очень мало энергии и имеют ротор с постоянными магнитами. Такой же двигатель приводит в действие кварцевые часы с батарейным питанием. Некоторые из этих часов, например хронографы, содержат более одного шагового двигателя.
По конструкции тесно связаны с трехфазными синхронными двигателями переменного тока, шаговые двигатели и SRM классифицируются как двигатели с регулируемым сопротивлением. Шаговые двигатели были и до сих пор часто используются в компьютерных принтерах, оптических сканерах и станках с числовым программным управлением (ЧПУ), таких как маршрутизаторы, плазменные резаки и токарные станки с ЧПУ.
Немагнитные двигатели
Электростатический двигатель основан на притяжении и отталкивании электрического заряда. Обычно электростатические двигатели являются двойными по сравнению с обычными двигателями с катушкой. Обычно для них требуется высоковольтный источник питания, хотя в очень маленьких двигателях требуется более низкое напряжение. Вместо этого обычные электродвигатели используют магнитное притяжение и отталкивание и требуют высокого тока при низких напряжениях. В 1750-х годах Бенджамин Франклин и Эндрю Гордон разработали первые электростатические двигатели.Сегодня электростатический двигатель часто используется в микроэлектромеханических системах (МЭМС), где их управляющее напряжение ниже 100 вольт, а при движении заряженные пластины гораздо проще изготовить, чем катушки и железные сердечники. Кроме того, молекулярные механизмы, управляющие живыми клетками, часто основаны на линейных и вращающихся электростатических двигателях.
Пьезоэлектрический двигатель или пьезодвигатель – это тип электродвигателя, основанный на изменении формы пьезоэлектрического материала при приложении электрического поля.Пьезоэлектрические двигатели используют обратный пьезоэлектрический эффект, при котором материал производит акустические или ультразвуковые колебания для создания линейного или вращательного движения. В одном механизме удлинение в одной плоскости используется для последовательного растяжения и удержания положения, подобно тому, как движется гусеница.
В двигательной установке космического корабля с электроприводом используется технология электродвигателя для приведения космического корабля в космическое пространство, большинство систем основано на электрическом приводе топлива в высокую скорость, а некоторые системы основаны на принципах электродинамической привязки движения к магнитосфере.
Источник из Википедии
Каков принцип электродвигателя?
– Реклама –
Все мы слышали об электродвигателях, но всегда возникал вопрос: «Каков принцип электродвигателя»? Электродвигатель – это устройство, преобразующее электрическую энергию в механическую. В основном существует три типа электродвигателей.
- Двигатель постоянного тока.
- Асинхронный двигатель.
- Синхронный двигатель.
Все эти двигатели работают по более или менее одинаковому принципу.Работа электродвигателя в основном зависит от взаимодействия магнитного поля с током.
Принцип действия электродвигателя: движение электродвигателя за счет электромагнетизма
Основная идея электродвигателя действительно проста: вы помещаете в него электричество на одном конце, а ось (металлический стержень) вращается на другом конце, давая вам возможность управлять какой-либо машиной. Как это работает на практике? Как именно преобразовать электричество в движение? Чтобы найти ответ на этот вопрос, нам нужно вернуться почти на 200 лет назад.
Предположим, вы берете кусок обычного провода, превращаете его в большую петлю и прокладываете его между полюсами мощного постоянного подковообразного магнита. Теперь, если вы подключите два конца провода к батарее, провод ненадолго подпрыгнет. Удивительно, когда видишь это впервые. Это похоже на волшебство! Но есть научное объяснение.
Когда электрический ток начинает течь по проводу, он создает вокруг него магнитное поле. Если вы поместите провод рядом с постоянным магнитом, это временное магнитное поле будет взаимодействовать с полем постоянного магнита.Вы знаете, что два расположенных рядом магнита либо притягиваются, либо отталкиваются. Точно так же временный магнетизм вокруг провода притягивает или отталкивает постоянный магнетизм от магнита, и это то, что заставляет провод подпрыгивать.
Принцип действия электродвигателя: правило левой руки Флеминга
Вы можете определить направление, в котором будет прыгать провод, используя удобную мнемонику (вспомогательное средство для запоминания), называемую правилом левой руки Флеминга (иногда называемым правилом моторики).
Вытяните большой, указательный и второй пальцы левой руки так, чтобы все три были под прямым углом.Если вы укажете пальцем C ond в направлении тока C (который течет от положительного к отрицательному полюсу батареи), а первый палец F – в направлении поля F (который течет от северного полюса магнита к южному), ваш thu M b покажет направление, в котором движется провод M .
Это…
- F Первый палец = F ield
- Se C Прямой палец = C Текущая
- Чт M b = M otion
Принцип действия электродвигателя: принцип работы электродвигателя
Теоретически предположим, что мы сгибаем наш провод в квадратную U-образную петлю, так что фактически через магнитное поле проходят два параллельных провода.Один из них отводит от нас электрический ток по проводу, а другой возвращает ток обратно. Поскольку ток течет в проводах в противоположных направлениях, правило левой руки Флеминга говорит нам, что два провода будут двигаться в противоположных направлениях. Другими словами, когда мы включаем электричество, один из проводов будет двигаться вверх, а другой – вниз.
Если бы катушка с проволокой могла продолжать двигаться вот так, она бы вращалась непрерывно – и мы были бы на пути к созданию электродвигателя.Но этого не может произойти с нашей нынешней настройкой: провода быстро запутаются. Более того, если бы катушка могла вращаться достаточно далеко, произошло бы кое-что еще.
Когда катушка достигает вертикального положения, она переворачивается, поэтому электрический ток течет через нее в противоположном направлении. Теперь силы на каждой стороне катушки меняются местами. Вместо того, чтобы постоянно вращаться в одном и том же направлении, он движется назад в том направлении, откуда только что пришел! Представьте себе электропоезд с таким двигателем: он продолжает двигаться вперед и назад на месте, фактически никуда не уезжая.
На практике есть два способа решить эту проблему. Один из них – использовать электрический ток, который периодически меняет направление, известный как переменный ток (AC). В небольших двигателях с батарейным питанием, которые мы используем дома, лучшее решение – добавить на концы катушки компонент, называемый коммутатором.
Не беспокойтесь о бессмысленном техническом названии: это немного старомодное слово «коммутация» немного похоже на слово «коммутируют». Это просто означает движение вперед и назад так же, как поездка на работу означает движение туда и обратно.В своей простейшей форме коммутатор представляет собой металлическое кольцо, разделенное на две отдельные половины, и его задача – реверсировать электрический ток в катушке каждый раз, когда катушка вращается на пол-оборота. Один конец катушки прикреплен к каждой половине коммутатора.
Электрический ток от аккумуляторной батареи подключается к электрическим клеммам двигателя. Они подают электроэнергию в коммутатор через пару незакрепленных соединителей, называемых щетками, сделанных либо из кусочков графита (мягкий углерод, похожий на «грифель» карандаша), либо из тонких кусков упругого металла, который (как следует из названия) «задевает» коммутатор.Когда коммутатор установлен, при прохождении электричества по цепи катушка будет постоянно вращаться в одном и том же направлении.
Такой простой экспериментальный двигатель, как этот, не способен развивать большую мощность. Мы можем увеличить вращающую силу (или крутящий момент), которую может создать двигатель, тремя способами: либо у нас может быть более мощный постоянный магнит, либо мы можем увеличить электрический ток, текущий через провод, либо мы можем сделать катушку так, чтобы она много «витков» (петель) очень тонкой проволоки вместо одного «витка» толстой проволоки.
На практике двигатель также имеет постоянный магнит, изогнутый в форме круга, поэтому он почти касается катушки с проволокой, которая вращается внутри него. Чем ближе друг к другу магнит и катушка, тем большую силу может создать двигатель.
Хотя мы описали несколько различных частей, вы можете представить двигатель как имеющий всего два основных компонента:
- По краю корпуса двигателя находится постоянный магнит (или магниты), который остается статичным, поэтому его называют статором двигателя.
- Внутри статора находится катушка, установленная на оси, которая вращается с высокой скоростью, и это называется ротором. Ротор также включает в себя коммутатор.
Вы можете посмотреть здесь, чтобы получить более наглядное представление о принципе работы электродвигателей.
Подробнее о Linquip
Простое руководство по эффективности двигателя: что это такое и что делатьПринцип работы электродвигателя: работа двигателей постоянного тока
Принцип работы двигателя постоянного тока в основном зависит от правила левой руки Флеминга.В базовом двигателе постоянного тока между магнитными полюсами размещен якорь. Если обмотка якоря питается от внешнего источника постоянного тока, ток начинает течь по проводникам якоря. Поскольку проводники проводят ток внутри магнитного поля, они испытывают силу, которая стремится вращать якорь.
Предположим, что проводники якоря под N полюсами полевого магнита проводят ток вниз (крестики), а проводники под S полюсами проводят ток вверх (точки).Применяя правило левой руки Флеминга, можно определить направление силы F, испытываемой проводником под N полюсами, и силу, испытываемую проводниками под S-полюсами. Обнаружено, что в любой момент силы, действующие на проводники, имеют такое направление, что они стремятся вращать якорь.
Опять же, из-за этого вращения проводники под N-полюсами попадают под S-полюс, а проводники под S-полюсами – под N-полюс. В то время как проводники идут от N-полюса к S-полюсу и S-полюса к N-полюсу, направление тока через них меняется на противоположное с помощью коммутатора.
Из-за этого реверсирования тока все проводники проходят под N-полюсами, переносят ток в нисходящем направлении, а все проводники, проходящие под S-полюсами, переносят ток в восходящем направлении, как показано на рисунке. Следовательно, каждый проводник находится под N-полюсом, испытывающим силу в одном и том же направлении, и то же самое верно для проводников, проходящих под S-полюсами. Это явление помогает развивать постоянный и однонаправленный крутящий момент.
Принцип работы электродвигателя: работа асинхронных двигателей
Работа электродвигателя в случае асинхронного двигателя немного отличается от электродвигателя постоянного тока.В однофазном асинхронном двигателе, когда на обмотку статора подается однофазное питание, создается пульсирующее магнитное поле, а в трехфазном асинхронном двигателе, когда трехфазное питание подается на трехфазную обмотку статора, возникает вращающееся магнитное поле. производится.
Ротор асинхронного двигателя может быть с обмоткой или с короткозамкнутым ротором. Каким бы ни был тип ротора, проводники на нем закорочены на концах, образуя замкнутый контур. Из-за вращающегося магнитного поля поток проходит через воздушный зазор между ротором и статором, проходит мимо поверхности ротора и, таким образом, разрезает проводник ротора.
Следовательно, согласно закону электромагнитной индукции Фарадея, в проводниках замкнутого ротора будет циркулировать индуцированный ток. Величина наведенного тока пропорциональна скорости изменения магнитной связи во времени. Опять же, эта скорость изменения магнитной связи пропорциональна относительной скорости между ротором и вращающимся магнитным полем. Согласно закону Ленца, ротор будет пытаться уменьшить все причины возникновения в нем тока. Следовательно, ротор вращается и пытается достичь скорости вращающегося магнитного поля, чтобы уменьшить относительную скорость между ротором и вращающимся магнитным полем.
Принцип работы электродвигателя: работа синхронных двигателей
В синхронном двигателе, когда на неподвижную трехфазную обмотку статора подается сбалансированное трехфазное питание, создается вращающееся магнитное поле, которое вращается с синхронной скоростью. Теперь, если внутри этого вращающегося магнитного поля поместить электромагнит, он будет магнитно заблокирован с вращающимся магнитным полем, и первый будет вращаться с вращающимся магнитным полем с той же скоростью, что и с синхронной скоростью.
– Объявление –
Как работает двигатель постоянного тока?
Теоретически одна и та же машина постоянного тока может использоваться в качестве двигателя или генератора. Следовательно, конструкция двигателя постоянного тока такая же, как и у генератора постоянного тока.
Принцип работы двигателя постоянного тока
Электродвигатель – это электрическая машина, преобразующая электрическую энергию в механическую. Основной принцип работы двигателя постоянного тока : « всякий раз, когда проводник с током помещается в магнитное поле, он испытывает механическую силу». Направление этой силы задается правилом левой руки Флеминга, а ее величина определяется как F = BIL. Где B = плотность магнитного потока, I = ток и L = длина проводника в магнитном поле.
Правило левой руки Флеминга : Если мы вытянем первый, второй и большой пальцы левой руки перпендикулярно друг другу, а направление магнитного поля будет представлено первым пальцем, направление тока будет представлено как второй палец, затем большой палец представляет направление силы, действующей на проводник с током.
| Анимация: Работа двигателя постоянного тока (предоставлено Lookang) |
Анимация, приведенная выше, помогает понять принцип работы двигателя постоянного тока . Когда обмотки якоря подключены к источнику постоянного тока, в обмотке возникает электрический ток. Магнитное поле может создаваться обмоткой возбуждения (электромагнетизм) или постоянными магнитами. В этом случае проводники якоря с током испытывают силу магнитного поля в соответствии с принципом, изложенным выше.
Коммутаторвыполнен сегментированным для достижения однонаправленного крутящего момента. В противном случае направление силы менялось бы каждый раз, когда направление движения проводника менялось на противоположное в магнитном поле. Так работает двигатель постоянного тока !
Задняя ЭДССогласно фундаментальным законам природы, преобразование энергии невозможно, пока есть что-то, что препятствует преобразованию. В случае генераторов это противодействие обеспечивается магнитным сопротивлением, а в случае двигателей постоянного тока – противоэдс .
Когда якорь двигателя вращается, проводники также разрезают линии магнитного потока и, следовательно, согласно закону электромагнитной индукции Фарадея, в проводниках якоря индуцируется ЭДС. Направление этой наведенной ЭДС таково, что она противодействует току якоря (I a ). На схеме ниже показано направление обратной ЭДС и тока якоря. Величина обратной ЭДС может быть задана уравнением ЭДС генератора постоянного тока.
Значение обратной ЭДС:
Величина обратной ЭДС прямо пропорциональна скорости двигателя. Представьте, что нагрузка на двигатель постоянного тока внезапно уменьшилась. В этом случае требуемый крутящий момент будет мал по сравнению с текущим крутящим моментом. Скорость двигателя начнет увеличиваться из-за превышения крутящего момента. Следовательно, величина обратной ЭДС пропорциональна скорости. С увеличением обратной ЭДС ток якоря начнет уменьшаться. Поскольку крутящий момент пропорционален току якоря, он также будет уменьшаться, пока не станет достаточным для нагрузки.Таким образом, скорость мотора будет регулироваться.
С другой стороны, если двигатель постоянного тока внезапно нагружается, эта нагрузка вызовет снижение скорости. Из-за уменьшения скорости обратная ЭДС также уменьшится, что приведет к увеличению тока якоря. Повышенный ток якоря увеличит крутящий момент, чтобы удовлетворить требованиям нагрузки. Следовательно, наличие обратной ЭДС делает двигатель постоянного тока «саморегулирующимся» .
Типы двигателей постоянного тока
Двигатели постоянного тока обычно классифицируются в зависимости от конфигурации возбуждения:- С отдельным возбуждением (обмотка возбуждения питается от внешнего источника)
- Самовозбуждение –
- Последовательная обмотка (обмотка возбуждения включена последовательно с якорем)
- Шунтовая обмотка (обмотка возбуждения включена параллельно якорю)
- Сложная рана –
См. Схему классификации машин постоянного тока здесь.
Запишите принцип работы электромотора класса 12 по физике CBSE
Подсказка: Электродвигатель можно определить как электрическое устройство, преобразующее электрическую энергию в механическую. Большинство электродвигателей работают на основе взаимодействия между магнитным полем электродвигателя и электрическим током в проволочной обмотке, что является основным принципом для создания силы в виде крутящего момента, приложенного к валу электродвигателя. Полный пошаговый ответ:
Электродвигатель работает по принципу магнитного воздействия тока.Его принцип заключается в том, что когда прямоугольная катушка помещается в магнитное поле и через нее пропускается ток, катушка вращается в результате сил, действующих на катушку.
Следующие части являются частями электродвигателя:
Источник питания постоянного тока: это компонент, в котором генерируется рабочий источник энергии.
Коммутатор: направление электрического источника, обеспечиваемого источником питания, поддерживается этой частью электродвигателя.
Якорь ротора: он непрерывно вращается при работающем двигателе.Он также предназначен для помощи в перемещении и подаче электроэнергии на другие части двигателя и транспортного средства.
Ось: Ось электрического транспортного средства содержит часть основного источника энергии, который обеспечивает возможность управления транспортным средством посредством рулевого управления и использования передач.
Полевой магнит: полевой магнит находится внутри электродвигателя и создает магнитное поле, которое позволяет внутреннему проводу катушки в двигателе постоянного тока вращаться.
Основная идея электродвигателя действительно очень проста: вы помещаете в него электричество на одном конце, а металлический стержень вращается на другом конце, давая вам возможность приводить в движение любую машину.
Примечание: Электродвигатели настолько важны, что влияют практически на все аспекты современной жизни. Холодильники, пылесосы, кондиционеры, вентиляторы, жесткие диски компьютеров, автоматические стеклоподъемники и многие другие приборы и устройства используют электродвигатели для преобразования электрической энергии в полезную механическую энергию.
Принцип работы двигателя постоянного тока
Двигатель постоянного тока – это электрическая машина, которая преобразует электрическую энергию в механическую энергию .
Работа двигателя постоянного тока основана на том принципе, что когда проводник с током помещается в магнитное поле, он испытывает механическую силу.
Направление механической силы задается правилом левой руки Флеминга , а ее величина определяется как F = BIL Ньютон.
Принципиальной разницы в конструкции генератора постоянного тока и двигателя постоянного тока нет. Фактически, одна и та же машина постоянного тока может использоваться взаимозаменяемо как генератор или как двигатель.
Как и генераторы, существуют различные типы двигателей постоянного тока, которые также подразделяются на с параллельной обмоткой, с последовательной обмоткой и с комбинированной обмоткой .
Двигатели постоянного тока редко используются в обычных приложениях, потому что все компании, занимающиеся электроснабжением, поставляют переменный ток.
Однако для специальных применений, таких как сталелитейные заводы , шахты и электропоезда , выгодно преобразовывать переменный ток в постоянный, чтобы использовать двигатели постоянного тока.Причина в том, что скорость / крутящий момент характеристики двигателей постоянного тока намного превосходят характеристики двигателей переменного тока.
Поэтому неудивительно, что для промышленных приводов двигатели постоянного тока так же популярны, как и трехфазные асинхронные двигатели.
Принцип действия двигателя постоянного тока
Машина, преобразующая электрическую мощность постоянного тока в механическую, называется двигателем постоянного тока.
Работа двигателя постоянного тока основана на том принципе, что когда проводник с током помещается в магнитное поле, на проводник действует механическая сила.
Направление этой силы задается правилом левой руки Флеминга , а величина определяется как;
F = BIL Ньютоны
Согласно правилу левой руки Флеминга, когда электрический ток проходит через катушку в магнитном поле, магнитная сила создает крутящий момент, который вращает двигатель постоянного тока.
Направление этой силы перпендикулярно как проводу, так и магнитному полю.
Правило левой руки FlemingsВ принципе, конструктивных различий между двигателем постоянного тока и генератором постоянного тока нет.Та же машина постоянного тока может работать как генератор или двигатель.
Поперечное сечение машины постоянного токаРабота двигателя постоянного тока
Рассмотрим часть многополюсного двигателя постоянного тока , как показано на рисунке ниже. Когда клеммы двигателя подключены к внешнему источнику питания постоянного тока:
,- ,
- , полевые магниты , возбуждаются, образуя чередующиеся северный и южный полюса ,
- , проводники якоря , проводят ток.
Все проводники под северным полюсом переносят ток в одном направлении, а все проводники под южным полюсом несут токи в противоположном направлении.
Проводники якоря под N-полюсом переносят токи в плоскость бумаги (обозначенную на рисунке как ⊗). А проводники под S-полюсом выводят токи из плоскости бумаги (обозначенной на рисунке как ⨀).
Поскольку каждый проводник якоря проводит ток и находится в магнитном поле, на него действует механическая сила .
При применении правила левой руки Флеминга становится ясно, что сила, действующая на каждый проводник, имеет тенденцию вращать якорь против часовой стрелки.Все эти силы в сумме создают крутящий момент , приводящий к вращению якоря.
Когда проводник перемещается от одной стороны щетки к другой, ток в этом проводнике меняется на противоположный. В то же время он попадает под влияние следующего полюса противоположной полярности. Следовательно, направление силы на проводник остается таким же, как .
Следует отметить, что функция коммутатора в двигателе такая же, как и в генераторе.Путем изменения направления тока в каждом проводнике при его переходе от одного полюса к другому, это помогает развивать непрерывный и однонаправленный крутящий момент .
