Все про широтно-импульсную модуляцию (ШИМ)
Широтно-импульсная модуляция (ШИМ) – это метод преобразования сигнала, при котором изменяется длительность импульса (скважность), а частота остаётся константой. В английской терминологии обозначается как PWM (pulse-width modulation). В данной статье подробно разберемся, что такое ШИМ, где она применяется и как работает.
Область применения
С развитием микроконтроллерной техники перед ШИМ открылись новые возможности. Этот принцип стал основой для электронных устройств, требующих, как регулировки выходных параметров, так и поддержания их на заданном уровне. Метод широтно-импульсной модуляции применяется для изменения яркости света, скорости вращения двигателей, а также в управлении силовым транзистором блоков питания (БП) импульсного типа.
Широтно-импульсная (ШИ) модуляция активно используется в построении систем управления яркостью светодиодов. Благодаря низкой инерционности, светодиод успевает переключаться (вспыхивать и гаснуть) на частоте в несколько десятков кГц. Его работа в импульсном режиме воспринимается человеческим глазом как постоянное свечение. В свою очередь яркость зависит от длительности импульса (открытого состояния светодиода) в течение одного периода. Если время импульса равно времени паузы, то есть коэффициент заполнения – 50%, то яркость светодиода будет составлять половину от номинальной величины. С популяризацией светодиодных ламп на 220В стал вопрос о повышении надёжности их работы при нестабильном входном напряжении. Решение было найдено в виде универсальной микросхемы – драйвера питания, работающего по принципу широтно-импульсной или частотно-импульсной модуляции. Схема на базе одного из таких драйверов детально описана здесь.
Его работа в импульсном режиме воспринимается человеческим глазом как постоянное свечение. В свою очередь яркость зависит от длительности импульса (открытого состояния светодиода) в течение одного периода. Если время импульса равно времени паузы, то есть коэффициент заполнения – 50%, то яркость светодиода будет составлять половину от номинальной величины. С популяризацией светодиодных ламп на 220В стал вопрос о повышении надёжности их работы при нестабильном входном напряжении. Решение было найдено в виде универсальной микросхемы – драйвера питания, работающего по принципу широтно-импульсной или частотно-импульсной модуляции. Схема на базе одного из таких драйверов детально описана здесь.
Подаваемое на вход микросхемы драйвера сетевое напряжение постоянно сравнивается с внутрисхемным опорным напряжением, формируя на выходе сигнал ШИМ (ЧИМ), параметры которого задаются внешними резисторами. Некоторые микросхемы имеют вывод для подачи аналогового или цифрового сигнала управления. Таким образом, работой импульсного драйвера можно управлять с помощью другого ШИ-преобразователя. Интересно, что на светодиод поступают не высокочастотные импульсы, а сглаженный дросселем ток, который является обязательным элементом подобных схем.
Интересно, что на светодиод поступают не высокочастотные импульсы, а сглаженный дросселем ток, который является обязательным элементом подобных схем.
Масштабное применение ШИМ отражено во всех LCD панелях со светодиодной подсветкой. К сожалению, в LED мониторах большая часть ШИ-преобразователей работает на частоте в сотни Герц, что негативно отражается на зрении пользователей ПК.
Микроконтроллер Ардуино тоже может функционировать в режиме ШИМ контроллера. Для этого следует вызвать функцию AnalogWrite() с указанием в скобках значения от 0 до 255. Ноль соответствует 0В, а 255 – 5В. Промежуточные значения рассчитываются пропорционально.
Повсеместное распространение устройств, работающих по принципу ШИМ, позволило человечеству уйти от трансформаторных блоков питания линейного типа. Как результат – повышение КПД и снижение в несколько раз массы и размеров источников питания.
ШИМ-контроллер является неотъемлемой частью современного импульсного блока питания. Он управляет работой силового транзистора, расположенного в первичной цепи импульсного трансформатора. За счёт наличия цепи обратной связи напряжение на выходе БП всегда остаётся стабильным. Малейшее отклонение выходного напряжения через обратную связь фиксируется микросхемой, которая мгновенно корректирует скважность управляющих импульсов. Кроме этого современный ШИМ-контроллер решает ряд дополнительных задач, способствующих повышению надёжности источника питания:
Он управляет работой силового транзистора, расположенного в первичной цепи импульсного трансформатора. За счёт наличия цепи обратной связи напряжение на выходе БП всегда остаётся стабильным. Малейшее отклонение выходного напряжения через обратную связь фиксируется микросхемой, которая мгновенно корректирует скважность управляющих импульсов. Кроме этого современный ШИМ-контроллер решает ряд дополнительных задач, способствующих повышению надёжности источника питания:
- обеспечивает режим плавного пуска преобразователя;
- ограничивает амплитуду и скважность управляющих импульсов;
- контролирует уровень входного напряжения;
- защищает от короткого замыкания и превышения температуры силового ключа;
- при необходимости переводит устройство в дежурный режим.
Принцип работы ШИМ контроллера
Задача ШИМ контроллера состоит в управлении силовым ключом за счёт изменения управляющих импульсов. Работая в ключевом режиме, транзистор находится в одном из двух состояний (полностью открыт, полностью закрыт). В закрытом состоянии ток через p-n-переход не превышает несколько мкА, а значит, мощность рассеивания стремится к нулю. В открытом состоянии, несмотря на большой ток, сопротивление p-n-перехода чрезмерно мало, что также приводит к незначительным тепловым потерям. Наибольшее количество тепла выделяется в момент перехода из одного состояния в другое. Но за счёт малого времени переходного процесса по сравнению с частотой модуляции, мощность потерь при переключении незначительна.
В закрытом состоянии ток через p-n-переход не превышает несколько мкА, а значит, мощность рассеивания стремится к нулю. В открытом состоянии, несмотря на большой ток, сопротивление p-n-перехода чрезмерно мало, что также приводит к незначительным тепловым потерям. Наибольшее количество тепла выделяется в момент перехода из одного состояния в другое. Но за счёт малого времени переходного процесса по сравнению с частотой модуляции, мощность потерь при переключении незначительна.
Широтно-импульсная модуляция разделяется на два вида: аналоговая и цифровая. Каждый из видов имеет свои преимущества и схемотехнически может реализовываться разными способами.
Аналоговая ШИМ
Принцип действия аналогового ШИ-модулятора основан на сравнении двух сигналов, частота которых отличается на несколько порядков. Элементом сравнения выступает операционный усилитель (компаратор). На один из его входов подают пилообразное напряжение высокой постоянной частоты, а на другой – низкочастотное модулирующее напряжение с переменной амплитудой. Компаратор сравнивает оба значения и на выходе формирует прямоугольные импульсы, длительность которых определяется текущим значением модулирующего сигнала. При этом частота ШИМ равна частоте сигнала пилообразной формы.
Элементом сравнения выступает операционный усилитель (компаратор). На один из его входов подают пилообразное напряжение высокой постоянной частоты, а на другой – низкочастотное модулирующее напряжение с переменной амплитудой. Компаратор сравнивает оба значения и на выходе формирует прямоугольные импульсы, длительность которых определяется текущим значением модулирующего сигнала. При этом частота ШИМ равна частоте сигнала пилообразной формы.
Цифровая ШИМ
Широтно-импульсная модуляция в цифровой интерпретации является одной из многочисленных функций микроконтроллера (МК). Оперируя исключительно цифровыми данными, МК может формировать на своих выходах либо высокий (100%), либо низкий (0%) уровень напряжения. Однако в большинстве случаев для эффективного управления нагрузкой напряжение на выходе МК необходимо изменять. Например, регулировка скорости вращения двигателя, изменение яркости светодиода. Что делать, чтобы получить на выходе микроконтроллера любое значение напряжения в диапазоне от 0 до 100%?
Вопрос решается применением метода широтно-импульсной модуляции и, используя явление передискретизации, когда заданная частота переключения в несколько раз превышает реакцию управляемого устройства. Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки. Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки. Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
- высокой эффективности преобразования сигнала;
- стабильность работы;
- экономии энергии, потребляемой нагрузкой;
- низкой стоимости;
- высокой надёжности всего устройства.
Получить на выводах микроконтроллера ШИМ сигнал можно двумя способами: аппаратно и программно. В каждом МК имеется встроенный таймер, который способен генерировать ШИМ импульсы на определённых выводах. Так достигается аппаратная реализация. Получение ШИМ сигнала с помощью программных команд имеет больше возможностей в плане разрешающей способности и позволяет задействовать большее количество выводов. Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Примечательно, что в цифровой ШИМ количество импульсов за период может быть различным, а сами импульсы могут быть расположены в любой части периода. Уровень выходного сигнала определяется суммарной длительностью всех импульсов за период. При этом следует понимать, что каждый дополнительный импульс – это переход силового транзистора из открытого состояния в закрытое, что ведёт к росту потерь во время переключений.
Пример использования ШИМ регулятора
Один из вариантов реализации ШИМ простого регулятора уже описывался ранее в этой статье. Он построен на базе микросхемы NE555 и имеет небольшую обвязку. Но, несмотря на простату схемы, регулятор имеет довольно широкую область применения: схемы управления яркости светодиодов, светодиодных лент, регулировка скорость вращения двигателей постоянного тока.
ШИМ – широтно-импульсная модуляция – Help for engineer
ШИМ – широтно-импульсная модуляция
Широтно-импульсная модуляция применяется в технике для преобразования переменного напряжения в постоянное, с изменением его среднего значения (Ud). Управление средним значением напряжения происходит путем изменения скважности импульсов.
Управление средним значением напряжения происходит путем изменения скважности импульсов.
Скважность – это отношение одного периода, к времени действия (длительности) импульса в нем. В англоязычной литературе часто встречается понятие коэффициент заполнения, который обратно пропорционален скважности. Формула скважности:
где T – длительность периода, с;
t – время действия импульса (длительность), с;
D – коэффициент заполнения.
То есть, не смотря на то, что скважность и коэффициент заполнения могут использоваться в одинаковом контексте, физический смысл их отличается. Эти величины безразмерны. Коэффициент заполнения обычно отображают в процентах (%).
Рисунок 1 – Скважность импульсов
На приведенном выше рисунке изображены импульсы, которые возникают с определенной периодичностью. Длительность импульса равна ¼ периода Т, это означает, что коэффициент заполнения равен 25%, а скважность – 4. Специфическое название имеется у набора импульсов c коэффициентом заполнения – 50%, такой сигнал называется меандр.
Существуют цифровые и аналоговые ШИМ. Принцип их работы остается одинаковым вне зависимости от исполнения и заключается в сравнении двух видов сигналов:
Uоп – опорное (пилообразное, треугольное) напряжение;
Uупр – входное постоянное напряжение.
Cигналы поступают на компаратор, где они сравниваются, а при их пересечении возникает / исчезает (или становится отрицательным) сигнал на выходе ШИМ.
Выходное напряжение Uвых ШИМ имеет вид импульсов, изменяя их длительность, мы регулируем среднее значение напряжения (Ud) на выходе ШИМ:
Рисунок 2 – Скважность сигнала при однополярной ШИМ
Однополярная модуляция означает, что происходит формирование импульсов только положительной величины и имеет место нулевое значение напряжения. Осуществить такую модуляцию в некоторых схемах невозможно, преимущество однополярной модуляции: малое амплитудное значение высокочастотных гармоник.
В двухполярной модуляции вместо нулевого длительного напряжения формируется отрицательное напряжение, она проиллюстрирована на рисунке 4.![]()
Преимущество использования ШИМ – это легкость изменения величины напряжения при минимальных потерях. Конечно же, можно, применять делитель напряжения, но его работа основана на применении резисторов, а на них происходит рассеивание энергии, что в свою очередь вызывает нагрев и неэкономичность (преобразование электрической энергии в тепловую).
Работа широтно-импульсного преобразователя реализуется с помощью полупроводниковых приборов – транзисторов. Максимальные потери на транзисторах бывают при их полуоткрытом состоянии. Поэтому используют два крайних положения: полностью открыты или закрыты, тогда потери минимальны. Частота срабатывания транзисторов очень большая, то есть переходные состояния имеют мало времени и потери, фактически, сводятся к нулю.
ШИМ нашел широкое применение как регулятор оборотов двигателей постоянного тока (ДПТ).
Рисунок 3 – Схема ШИМ регулятора для ДПТ
Схема ШИМ управления двигателя постоянного тока состоит из тиристорного преобразователя VS1÷VS6, сглаживающего конденсатора С.![]()
Принцип работы схемы основан на двухполярной модуляции:
Рисунок 4 – Двухполярная широтно-импульсная модуляция
Недостаточно прав для комментирования
принцип действия и сфера применения. Принцип работы ШИМ контроллера
Широкое применение таймер 555 находит в устройствах регулирования, например, в ШИМ – регуляторах оборотов двигателей постоянного тока.
Все, кто когда – либо пользовался аккумуляторным шуруповертом, наверняка слышали писк, исходящий изнутри. Это свистят обмотки двигателя под воздействием импульсного напряжения, порождаемого системой ШИМ.
Другим способом регулировать обороты двигателя, подключенного к аккумулятору, просто неприлично, хотя вполне возможно.
Вариант ШИМ – регулятора на основе таймера 555 показан на рисунке 1.
Схема достаточно проста и базируется все на мультивибраторе, правда переделанном в генератор импульсов с регулируемой скважностью, которая зависит от соотношения скорости заряда и разряда конденсатора C1.
Заряд конденсатора происходит по цепи: +12V, R1, D1, левая часть резистора P1, C1, GND. А разряжается конденсатор по цепи: верхняя обкладка C1, правая часть резистора P1, диод D2, вывод 7 таймера, нижняя обкладка C1. Вращением движка резистора P1 можно изменять соотношение сопротивлений его левой и правой части, а следовательно время заряда и разряда конденсатора C1, и как следствие скважность импульсов.
Рисунок 1. Схема ШИМ – регулятора на таймере 555
Схема эта настолько популярна, что выпускается уже в виде набора, что и показано на последующих рисунках.
Рисунок 2. Принципиальная схема набора ШИМ – регулятора.
Здесь же показаны временные диаграммы, но, к сожалению, не показаны номиналы деталей. Их можно подсмотреть на рисунке 1, для чего он, собственно, здесь и показан. Вместо биполярного транзистора TR1 без переделки схемы можно применить мощный полевой, что позволит увеличить мощность нагрузки.
Кстати, на этой схеме появился еще один элемент – диод D4. Его назначение в том, чтобы предотвратить разряд времязадающего конденсатора C1 через источник питания и нагрузку – двигатель. Тем самым достигается стабилизация работы частоты ШИМ.
Кстати, с помощью подобных схем можно управлять не только оборотами двигателя постоянного тока, но и просто активной нагрузкой – лампой накаливания или каким-либо нагревательным элементом.
Рисунок 3. Печатная плата набора ШИМ – регулятора.
Если приложить немного труда, то вполне возможно такую воссоздать, используя одну из программ для рисования печатных плат. Хотя, учитывая немногочисленность деталей, один экземпляр будет проще собрать навесным монтажом.
Хотя, учитывая немногочисленность деталей, один экземпляр будет проще собрать навесным монтажом.
Рисунок 4. Внешний вид набора ШИМ – регулятора.
Правда, уже собранный фирменный набор, смотрится достаточно симпатично.
Вот тут, возможно, кто-то задаст вопрос: «Нагрузка в этих регуляторах подключена между +12В и коллектором выходного транзистора. А как быть, например, в автомобиле, ведь там все уже подключено к массе, корпусу, автомобиля?»
Да, против массы не попрешь, тут можно только рекомендовать переместить транзисторный ключ в разрыв «плюсового» провода. Возможный вариант подобной схемы показан на рисунке 5.
Рисунок 5.
На рисунке 6 показан отдельно выходной каскад на транзисторе MOSFET. Сток транзистора подключен к +12В аккумулятора, затвор просто «висит» в воздухе (что не рекомендуется), в цепь истока включена нагрузка, в нашем случае лампочка. Такой рисунок показан просто для объяснения, как работает MOSFET транзистор.
Рисунок 6.
Для того, чтобы MOSFET транзистор открыть, достаточно относительно истока подать на затвор положительное напряжение. В этом случае лампочка зажжется в полный накал и будет светить до тех пор, пока транзистор не будет закрыт.
На этом рисунке проще всего закрыть транзистор, замкнув накоротко затвор с истоком. И такое вот замыкание вручную для проверки транзистора вполне пригодно, но в реальной схеме, тем более импульсной придется добавить еще несколько деталей, как показано на рисунке 5.
Как было сказано выше, для открывания MOSFET транзистора необходим дополнительный источник напряжения. В нашей схеме его роль выполняет конденсатор C1, который заряжается по цепи +12В, R2, VD1, C1, LA1, GND.
Чтобы открыть транзистор VT1, на его затвор необходимо подать положительное напряжение от заряженного конденсатора C2. Совершенно очевидно, что это произойдет только при открытом транзисторе VT2. А это возможно лишь в том случае, если закрыт транзистор оптрона OP1. Тогда положительное напряжение с плюсовой обкладки конденсатора C2 через резисторы R4 и R1 откроет транзистор VT2.
Тогда положительное напряжение с плюсовой обкладки конденсатора C2 через резисторы R4 и R1 откроет транзистор VT2.
В этот момент входной сигнал ШИМ должен иметь низкий уровень и шунтировать светодиод оптрона (такое включение светодиодов часто называют инверсным), следовательно, светодиод оптрона погашен, а транзистор закрыт.
Чтобы закрыть выходной транзистор, надо соединить его затвор с истоком. В нашей схеме это произойдет, когда откроется транзистор VT3, а для этого требуется, чтобы был открыт выходной транзистор оптрона OP1.
Сигнал ШИМ в это время имеет высокий уровень, поэтому светодиод не шунтируется и излучает положенные ему инфракрасные лучи, транзистор оптрона OP1 открыт, что в результате приводит к отключению нагрузки – лампочки.
Как один из вариантов применения подобной схемы в автомобиле, это дневные ходовые огни. В этом случае автомобилисты претендуют на пользование лампами дальнего свете, включенными вполнакала. Чаще всего эти конструкции на микроконтроллере, в интернете их полно, но проще сделать на таймере 555.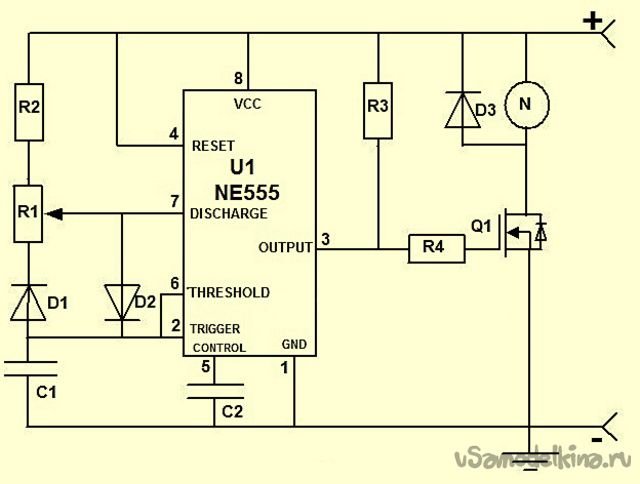
Драйверы для транзисторов MOSFET на таймере 555
Еще одно применение интегральный таймер 555 нашел в трехфазных инверторах, или как их чаще называют частотно – регулируемых приводах. Основное назначение «частотников» – это регулирование частоты вращения трехфазных асинхронных двигателей. В литературе и в интернете можно найти немало схем самодельных частотных приводов, интерес к которым не пропадает до настоящего времени.
В целом идея такова. Выпрямленное сетевое напряжение с помощью контроллера преобразуется в трехфазное, как в промышленной сети. Но частота этого напряжения может меняться под воздействием контроллера. Способы изменения различны, – просто от ручного управления до регулирования системой автоматики.
Блок схема трехфазного инвертора показана на рисунке 1. Точками A,B,C показаны три фазы, к которым подключается асинхронный двигатель. Эти фазы получаются при коммутации транзисторных ключей, в качестве которых на этом рисунке показаны специальные транзисторы IGBT.
Рисунок 1. Блок схема трехфазного инвертора
Между устройством управления (контроллером) и силовыми ключами установлены драйверы силовых ключей инвертора. В качестве драйверов используются специализированные микросхемы типа IR2130, позволяющие подключить к контроллеру сразу все шесть ключей,- три верхних и три нижних, а кроме этого еще обеспечивает целый комплекс защит. Все подробности об этой микросхеме можно узнать в Data Sheet.
И все бы хорошо, но для домашних опытов такая микросхема слишком дорогая. И тут на помощь опять приходит наш старый знакомый интегральный таймер 555, он же КР1006ВИ1. Схема одного плеча трехфазного моста показана на рисунке 2.
Рисунок 2. Драйверы для транзисторов MOSFET на таймере 555
В качестве драйверов верхних и нижних ключей силовых транзисторов используются КР1006ВИ1, работающие в режиме триггера Шмитта. При использовании таймера в таком режиме достаточно просто получить импульсный ток открывания затвора не менее 200мА, что обеспечивает быстрое переключение выходных транзисторов.
Транзисторы нижних ключей соединены непосредственно с общим проводом контроллера, поэтому никаких трудностей в управлении драйверами не возникает, – нижние драйверы управляются непосредственно от контроллера логическими сигналами.
Несколько сложнее обстоит дело с верхними ключами. Прежде всего, следует обратить внимание на то, как осуществляется питание драйверов верхних ключей. Такой способ питания называется «бустрепным». Смысл его в следующем. Питание микросхемы DA1 осуществляется от конденсатора C1. А вот каким образом он может зарядиться?
Когда откроется транзистор VT2 минусовая обкладка конденсатора C1 практически связана с общим проводом. В это время конденсатор C1 заряжается от источника питания через диод VD1 до напряжения +12В. Когда транзистор VT2 закроется, будет закрыт и диод VD1, но запаса энергии в конденсаторе C1 достаточно для срабатывания микросхемы DA1 в следующем цикле. Для осуществления гальванической развязки от контролера и между собой управление верхними ключами приходится осуществлять через оптрон U1.
Такой способ питания позволяет избавиться от усложнения блока питания, обойтись всего одним напряжением. В противном случае потребовались бы три изолированных обмотки на трансформаторе, три выпрямителя и три стабилизатора. Более подробно с таким способом питания можно ознакомиться в описаниях специализированных микросхем.
Борис Аладышкин, http://electrik.info
Широтно-импульсная модуляция (ШИМ) – это метод преобразования сигнала, при котором изменяется длительность импульса (скважность), а частота остаётся константой. В английской терминологии обозначается как PWM (pulse-width modulation). В данной статье подробно разберемся, что такое ШИМ, где она применяется и как работает.
Область применения
С развитием микроконтроллерной техники перед ШИМ открылись новые возможности. Этот принцип стал основой для электронных устройств, требующих, как регулировки выходных параметров, так и поддержания их на заданном уровне. Метод широтно-импульсной модуляции применяется для изменения яркости света, скорости вращения двигателей, а также в управлении силовым транзистором блоков питания (БП) импульсного типа.
Широтно-импульсная (ШИ) модуляция активно используется в построении систем управления яркостью светодиодов. Благодаря низкой инерционности, светодиод успевает переключаться (вспыхивать и гаснуть) на частоте в несколько десятков кГц. Его работа в импульсном режиме воспринимается человеческим глазом как постоянное свечение. В свою очередь яркость зависит от длительности импульса (открытого состояния светодиода) в течение одного периода. Если время импульса равно времени паузы, то есть коэффициент заполнения – 50%, то яркость светодиода будет составлять половину от номинальной величины. С популяризацией светодиодных ламп на 220В стал вопрос о повышении надёжности их работы при нестабильном входном напряжении. Решение было найдено в виде универсальной микросхемы – драйвера питания, работающего по принципу широтно-импульсной или частотно-импульсной модуляции. Схема на базе одного из таких драйверов детально описана .
Подаваемое на вход микросхемы драйвера сетевое напряжение постоянно сравнивается с внутрисхемным опорным напряжением, формируя на выходе сигнал ШИМ (ЧИМ), параметры которого задаются внешними резисторами. Некоторые микросхемы имеют вывод для подачи аналогового или цифрового сигнала управления. Таким образом, работой импульсного драйвера можно управлять с помощью другого ШИ-преобразователя. Интересно, что на светодиод поступают не высокочастотные импульсы, а сглаженный дросселем ток, который является обязательным элементом подобных схем.
Некоторые микросхемы имеют вывод для подачи аналогового или цифрового сигнала управления. Таким образом, работой импульсного драйвера можно управлять с помощью другого ШИ-преобразователя. Интересно, что на светодиод поступают не высокочастотные импульсы, а сглаженный дросселем ток, который является обязательным элементом подобных схем.
Масштабное применение ШИМ отражено во всех LCD панелях со светодиодной подсветкой. К сожалению, в LED мониторах большая часть ШИ-преобразователей работает на частоте в сотни Герц, что негативно отражается на зрении пользователей ПК.
Микроконтроллер Ардуино тоже может функционировать в режиме ШИМ контроллера. Для этого следует вызвать функцию AnalogWrite() с указанием в скобках значения от 0 до 255. Ноль соответствует 0В, а 255 – 5В. Промежуточные значения рассчитываются пропорционально.
Повсеместное распространение устройств, работающих по принципу ШИМ, позволило человечеству уйти от трансформаторных блоков питания линейного типа. Как результат – повышение КПД и снижение в несколько раз массы и размеров источников питания.
Как результат – повышение КПД и снижение в несколько раз массы и размеров источников питания.
ШИМ-контроллер является неотъемлемой частью современного импульсного блока питания. Он управляет работой силового транзистора, расположенного в первичной цепи импульсного трансформатора. За счёт наличия цепи обратной связи напряжение на выходе БП всегда остаётся стабильным. Малейшее отклонение выходного напряжения через обратную связь фиксируется микросхемой, которая мгновенно корректирует скважность управляющих импульсов. Кроме этого современный ШИМ-контроллер решает ряд дополнительных задач, способствующих повышению надёжности источника питания:
- обеспечивает режим плавного пуска преобразователя;
- ограничивает амплитуду и скважность управляющих импульсов;
- контролирует уровень входного напряжения;
- защищает от короткого замыкания и превышения температуры силового ключа;
- при необходимости переводит устройство в дежурный режим.
Принцип работы ШИМ контроллера
Задача ШИМ контроллера состоит в управлении силовым ключом за счёт изменения управляющих импульсов.![]() Работая в ключевом режиме, транзистор находится в одном из двух состояний (полностью открыт, полностью закрыт). В закрытом состоянии ток через p-n-переход не превышает несколько мкА, а значит, мощность рассеивания стремится к нулю. В открытом состоянии, несмотря на большой ток, сопротивление p-n-перехода чрезмерно мало, что также приводит к незначительным тепловым потерям. Наибольшее количество тепла выделяется в момент перехода из одного состояния в другое. Но за счёт малого времени переходного процесса по сравнению с частотой модуляции, мощность потерь при переключении незначительна.
Работая в ключевом режиме, транзистор находится в одном из двух состояний (полностью открыт, полностью закрыт). В закрытом состоянии ток через p-n-переход не превышает несколько мкА, а значит, мощность рассеивания стремится к нулю. В открытом состоянии, несмотря на большой ток, сопротивление p-n-перехода чрезмерно мало, что также приводит к незначительным тепловым потерям. Наибольшее количество тепла выделяется в момент перехода из одного состояния в другое. Но за счёт малого времени переходного процесса по сравнению с частотой модуляции, мощность потерь при переключении незначительна.
Широтно-импульсная модуляция разделяется на два вида: аналоговая и цифровая. Каждый из видов имеет свои преимущества и схемотехнически может реализовываться разными способами.
Аналоговая ШИМ
Принцип действия аналогового ШИ-модулятора основан на сравнении двух сигналов, частота которых отличается на несколько порядков. Элементом сравнения выступает операционный усилитель (компаратор). На один из его входов подают пилообразное напряжение высокой постоянной частоты, а на другой – низкочастотное модулирующее напряжение с переменной амплитудой. Компаратор сравнивает оба значения и на выходе формирует прямоугольные импульсы, длительность которых определяется текущим значением модулирующего сигнала. При этом частота ШИМ равна частоте сигнала пилообразной формы.
На один из его входов подают пилообразное напряжение высокой постоянной частоты, а на другой – низкочастотное модулирующее напряжение с переменной амплитудой. Компаратор сравнивает оба значения и на выходе формирует прямоугольные импульсы, длительность которых определяется текущим значением модулирующего сигнала. При этом частота ШИМ равна частоте сигнала пилообразной формы.
Цифровая ШИМ
Широтно-импульсная модуляция в цифровой интерпретации является одной из многочисленных функций микроконтроллера (МК). Оперируя исключительно цифровыми данными, МК может формировать на своих выходах либо высокий (100%), либо низкий (0%) уровень напряжения. Однако в большинстве случаев для эффективного управления нагрузкой напряжение на выходе МК необходимо изменять. Например, регулировка скорости вращения двигателя, изменение яркости светодиода. Что делать, чтобы получить на выходе микроконтроллера любое значение напряжения в диапазоне от 0 до 100%?
Вопрос решается применением метода широтно-импульсной модуляции и, используя явление передискретизации, когда заданная частота переключения в несколько раз превышает реакцию управляемого устройства. Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки. Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки. Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
- высокой эффективности преобразования сигнала;
- стабильность работы;
- экономии энергии, потребляемой нагрузкой;
- низкой стоимости;
- высокой надёжности всего устройства.
Получить на выводах микроконтроллера ШИМ сигнал можно двумя способами: аппаратно и программно. В каждом МК имеется встроенный таймер, который способен генерировать ШИМ импульсы на определённых выводах. Так достигается аппаратная реализация. Получение ШИМ сигнала с помощью программных команд имеет больше возможностей в плане разрешающей способности и позволяет задействовать большее количество выводов. Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Примечательно, что в цифровой ШИМ количество импульсов за период может быть различным, а сами импульсы могут быть расположены в любой части периода. Уровень выходного сигнала определяется суммарной длительностью всех импульсов за период. При этом следует понимать, что каждый дополнительный импульс – это переход силового транзистора из открытого состояния в закрытое, что ведёт к росту потерь во время переключений.
Пример использования ШИМ регулятора
Один из вариантов реализации ШИМ простого регулятора уже описывался ранее в . Он построен на базе микросхемы и имеет небольшую обвязку. Но, несмотря на простату схемы, регулятор имеет довольно широкую область применения: схемы управления яркости светодиодов, светодиодных лент, регулировка скорость вращения двигателей постоянного тока.
Читайте так же
Широтно – импульсные регуляторы постоянного тока
Необходимость регулировки постоянного напряжения для
питания мощных инерционных нагрузок чаще всего возникает у владельцев
автомобилей и другой авто-мото техники. Например, появилось
желание плавно менять яркость ламп освещения салона, габаритных
огней, автомобильных фар или вышел из строя узел регулирования
оборотов вентилятора автомобильного кондиционера, а замены нет.
Осуществить такое желание иногда нет возможности из-за большого тока
потребления этими устройствами – если устанавливать транзисторный
регулятор напряжения, компенсационный или параметрический, на регулирующем
транзисторе будет выделяться очень большая мощность, что потребует установки
больших радиаторов или введения принудительного охлаждения с помощью
малогабаритного вентилятора от компьютерных устройств. Выходом из
положения является применение широтно – импульсных схем, управляющих
мощными полевыми силовыми транзисторами
MOSFET
.
Эти транзисторы могут коммутировать очень большие токи (до 160А и более)
при напряжении на затворе 12 – 15 В. Сопротивление открытого транзистора
очень мало, что позволяет заметно снизить рассеиваемую мощность. Схемы
управления должны обеспечивать разность напряжений между затвором и истоком не
менее 12 .
Например, появилось
желание плавно менять яркость ламп освещения салона, габаритных
огней, автомобильных фар или вышел из строя узел регулирования
оборотов вентилятора автомобильного кондиционера, а замены нет.
Осуществить такое желание иногда нет возможности из-за большого тока
потребления этими устройствами – если устанавливать транзисторный
регулятор напряжения, компенсационный или параметрический, на регулирующем
транзисторе будет выделяться очень большая мощность, что потребует установки
больших радиаторов или введения принудительного охлаждения с помощью
малогабаритного вентилятора от компьютерных устройств. Выходом из
положения является применение широтно – импульсных схем, управляющих
мощными полевыми силовыми транзисторами
MOSFET
.
Эти транзисторы могут коммутировать очень большие токи (до 160А и более)
при напряжении на затворе 12 – 15 В. Сопротивление открытого транзистора
очень мало, что позволяет заметно снизить рассеиваемую мощность. Схемы
управления должны обеспечивать разность напряжений между затвором и истоком не
менее 12 . .. 15 В, в противном случае сопротивление канала сильно увеличивается
и рассеиваемая мощность значительно возрастает, что может привести
перегреву транзистора и выходу его из строя. Для широтно –
импульсных автомобильных низковольтных регуляторов
выпускаются специализированные микросхемы, например U
6080B
… U6084B
, L9610, L9611,
которые содержат узел повышения выходного напряжения до 25 -30 В при
напряжении питания 7 -14 В, что позволяет включать выходной транзистор по
схеме с общим стоком, чтобы можно было подключать нагрузку с общим
минусом, но достать их практически невозможно. Для большинства нагрузок,
которые потребляют ток не более 10А и не могут вызвать просадку бортового
напряжения можно использовать простые схемы без дополнительного узла повышения
напряжения. Такие схемы рассмотрены в этом разделе.
.. 15 В, в противном случае сопротивление канала сильно увеличивается
и рассеиваемая мощность значительно возрастает, что может привести
перегреву транзистора и выходу его из строя. Для широтно –
импульсных автомобильных низковольтных регуляторов
выпускаются специализированные микросхемы, например U
6080B
… U6084B
, L9610, L9611,
которые содержат узел повышения выходного напряжения до 25 -30 В при
напряжении питания 7 -14 В, что позволяет включать выходной транзистор по
схеме с общим стоком, чтобы можно было подключать нагрузку с общим
минусом, но достать их практически невозможно. Для большинства нагрузок,
которые потребляют ток не более 10А и не могут вызвать просадку бортового
напряжения можно использовать простые схемы без дополнительного узла повышения
напряжения. Такие схемы рассмотрены в этом разделе.
Первый ШИМ регулятор собран на
инверторах логической КМОП
микросхемы. Схема представляет собой генератор прямоугольных
импульсов на двух логических элементах, в котором за счёт диодов
раздельно меняется постоянная времени заряда и разряда
частотозадающего конденсатора, что позволяет изменять скважность
выходных импульсов и значение эффективного напряжения на нагрузке.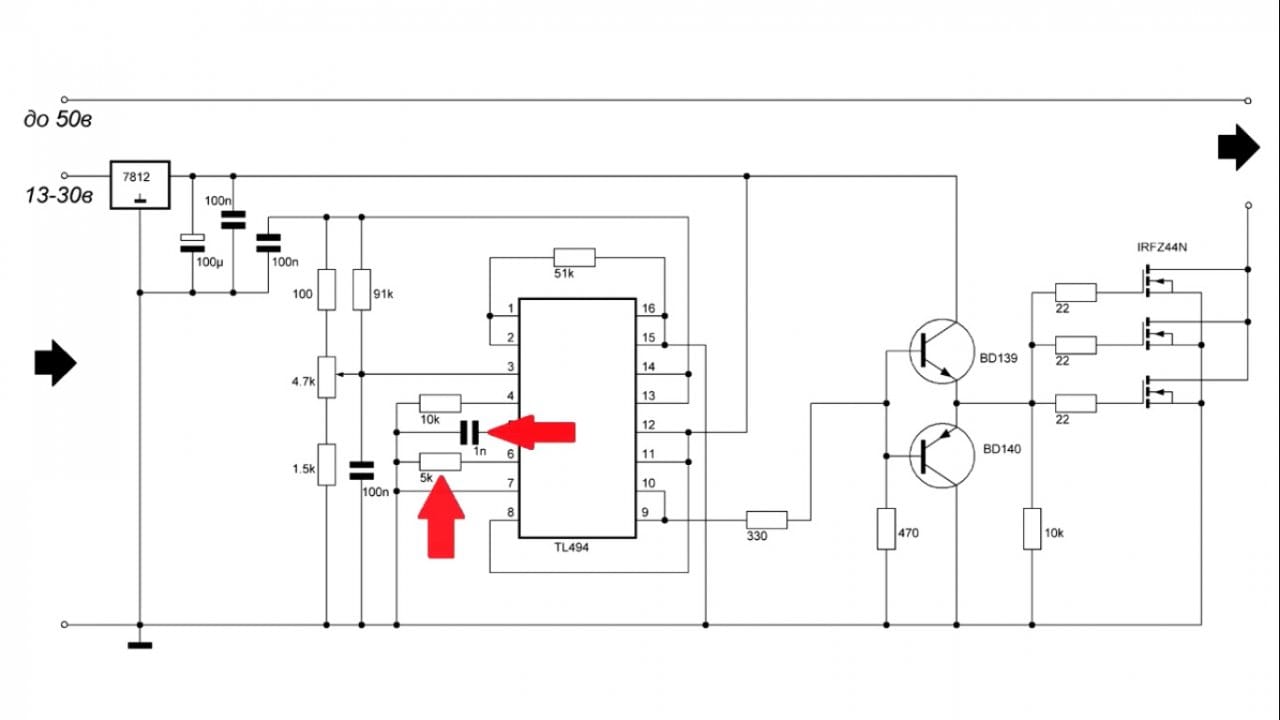 В схеме можно использовать любые инвертирующие КМОП элементы, например
К176ПУ2, К561ЛН1, а также любые элементы И, ИЛИ-НЕ, например
К561ЛА7, К561ЛЕ5 и подобные, соответственно сгруппировав их входы.
Полевой транзистор может быть любым из
MOSFET
,
которые выдерживают максимальный ток нагрузки, но желательно
использовать транзистор с как можно большим максимальным током, т.к. у
него меньшее сопротивление открытого канала, что уменьшает рассеиваемую
мощность и позволяет использовать радиатор меньшей площади.
Достоинство схемы – простота и доступность элементов, недостатки – диапазон изменения выходного напряжения чуть
меньше 100% и невозможно доработать схему с целью
введения дополнительных режимов, например плавного автоматического
увеличения или понижения напряжения на нагрузке, т.к. регулирование производится путём изменения
сопротивления переменного резистора, а не изменением уровня
управляющего напряжения.
В схеме можно использовать любые инвертирующие КМОП элементы, например
К176ПУ2, К561ЛН1, а также любые элементы И, ИЛИ-НЕ, например
К561ЛА7, К561ЛЕ5 и подобные, соответственно сгруппировав их входы.
Полевой транзистор может быть любым из
MOSFET
,
которые выдерживают максимальный ток нагрузки, но желательно
использовать транзистор с как можно большим максимальным током, т.к. у
него меньшее сопротивление открытого канала, что уменьшает рассеиваемую
мощность и позволяет использовать радиатор меньшей площади.
Достоинство схемы – простота и доступность элементов, недостатки – диапазон изменения выходного напряжения чуть
меньше 100% и невозможно доработать схему с целью
введения дополнительных режимов, например плавного автоматического
увеличения или понижения напряжения на нагрузке, т.к. регулирование производится путём изменения
сопротивления переменного резистора, а не изменением уровня
управляющего напряжения.
Гораздо лучшими характеристиками обладает вторая схема, но количество
элементов в ней чуть больше.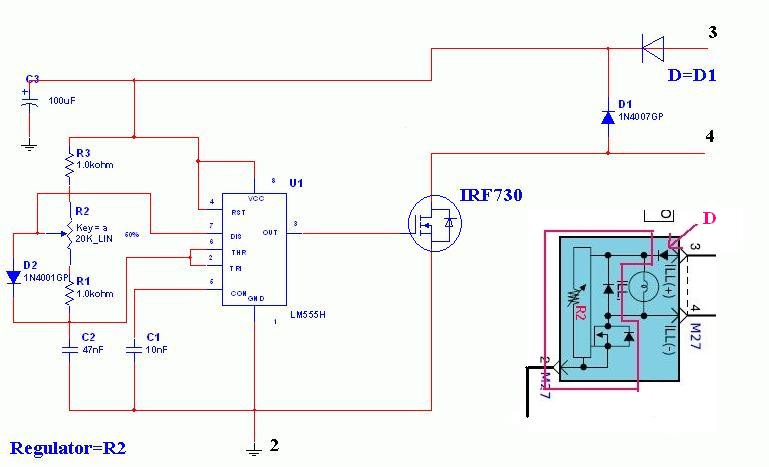 Регулировка эффективного значения
напряжения на нагрузке от 0 до 12 В производится изменением
напряжения на управляющем входе от 8 до 12 В. Диапазон
регулировки напряжения практически 100%. Максимальный
ток нагрузки полностью определяется типом силового полевого
транзистора и может быть очень значительным. Так как выходное напряжение
пропорционально входному управляющему напряжению, схема может
использоваться как составная часть системы регулирования,
например системы поддержания заданной температуры, если в
качестве нагрузки использовать нагреватель, а датчик
температуры подключить к простейшему пропорциональному регулятору, выход
которого подключается к управляющему входу устройства. Описанные
устройства имеют в основе несимметричный мультивибратор, но ШИМ
регулятор можно построить на микросхеме ждущего мультивибратора, как
показано на следующей странице.
Регулировка эффективного значения
напряжения на нагрузке от 0 до 12 В производится изменением
напряжения на управляющем входе от 8 до 12 В. Диапазон
регулировки напряжения практически 100%. Максимальный
ток нагрузки полностью определяется типом силового полевого
транзистора и может быть очень значительным. Так как выходное напряжение
пропорционально входному управляющему напряжению, схема может
использоваться как составная часть системы регулирования,
например системы поддержания заданной температуры, если в
качестве нагрузки использовать нагреватель, а датчик
температуры подключить к простейшему пропорциональному регулятору, выход
которого подключается к управляющему входу устройства. Описанные
устройства имеют в основе несимметричный мультивибратор, но ШИМ
регулятор можно построить на микросхеме ждущего мультивибратора, как
показано на следующей странице.
С аналоговым интегральным таймером SE555/NE555 (КР1006), выпускаемым компанией Signetics Corporation с далекого 1971 года прекрасно знакомо большинство советских и зарубежных радиолюбителей. Трудно перечислить, для каких только целей не использовалась эта недорогая, но многофункциональная микросхема за почти полувековой период своего существования. Однако, даже несмотря на быстрое развитие электронной промышленности в последние годы, она по-прежнему продолжает пользоваться популярностью и выпускается в значительных объемах.
Предлагаемая Jericho Uno простенькая схемка автомобильного ШИМ-регулятора – не профессиональная, полностью отлаженная разработка, отличающаяся своей безопасностью и надежностью. Это всего лишь небольшой дешевый эксперимент, собранный на доступных бюджетных деталях и вполне удовлетворяющий минимальным требованиям. Поэтому его разработчик не берет на себя ответственности за все то, что может произойти с вашим оборудованием при эксплуатации смоделированной схемы.
Схема ШИМ регулятор на NE555
Для создания ШИМ-устройства вам понадобится:- электропаяльник;
- микросхема NE555;
- переменный резистор на 100 кОм;
- резисторы на 47 Ом и 1 кОм по 0,5W;
- конденсатор на 0,1 мкФ;
- два диода 1N4148 (КД522Б).
Пошаговая сборка аналоговой схемы
Построение цепи начинаем с установки перемычек на микросхему. Используя паяльник, замыкаем между собой следующие контакты таймера: 2 и 6, 4 и 8.Дальше, руководствуясь направлением движения электронов, распаиваем на переменном резисторе «плечи» диодного моста (проход тока в одну сторону). Номиналы диодов подобраны из имеющихся в наличие, недорогих. Можно заменить их любыми другими – это практически не повлияет на работу схемы.
Во избежание короткого замыкания и перегорания микросхемы при выкручивании переменного резистора в крайнее положение, ставим по питанию шунтирующее сопротивление в 1 кОм (контакты 7-8).
Поскольку NE555 выступает в роли генератора пилы, для получения схемы с заданной частотой, длительностью импульса и паузой, осталось подобрать резистор и конденсатор. Неслышных 18 кГц нам даст конденсатор 4,7 нФ, но такое малое значение емкости вызовет перекос плеч при работе микросхемы. Ставим оптимальную в 0,1 мкФ (контакты 1-2).

Избежать противного «пищания» схемы и подтянуть выход к высокому уровню можно чем-то низкоомным, например резистором 47-51 Ом.
Осталось подключить питание и нагрузку. Схема рассчитана на входное напряжение бортовой сети автомобиля 12V постоянного тока, но для наглядной демонстрации вполне запустится и от 9V батареи. Подключаем ее на вход микросхемы, соблюдая полярность (плюс на 8 ножку, минус на 1 ножку).
Осталось разобраться с нагрузкой. Как видно из графика, при понижении переменным резистором выходного напряжения до 6V пила на выходе (ножки 1-3) сохранилась, то есть NE555 в данной схеме и генератор пилы и компаратор одновременно. Ваш таймер работает в а-стабильном режиме и имеет коэффициент заполнения меньше 50%.
Модуль выдерживает 6-9 А проходного постоянного тока, так что при минимальных потерях можно подключить к нему как светодиодную полосу в автомобиле, так и маломощный двигатель, который и дым развеет и лицо в жару обдует. Примерно так:
Или так:
Принцип работы ШИМ регулятора
Работа ШИМ регулятора достаточно проста.Смотирте видео работы ШИМ регулятора
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.
Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет “воспринимать” среднее значение подводимой к нему энергии.
Грубо говоря, двигатель будет “воспринимать” среднее значение подводимой к нему энергии.
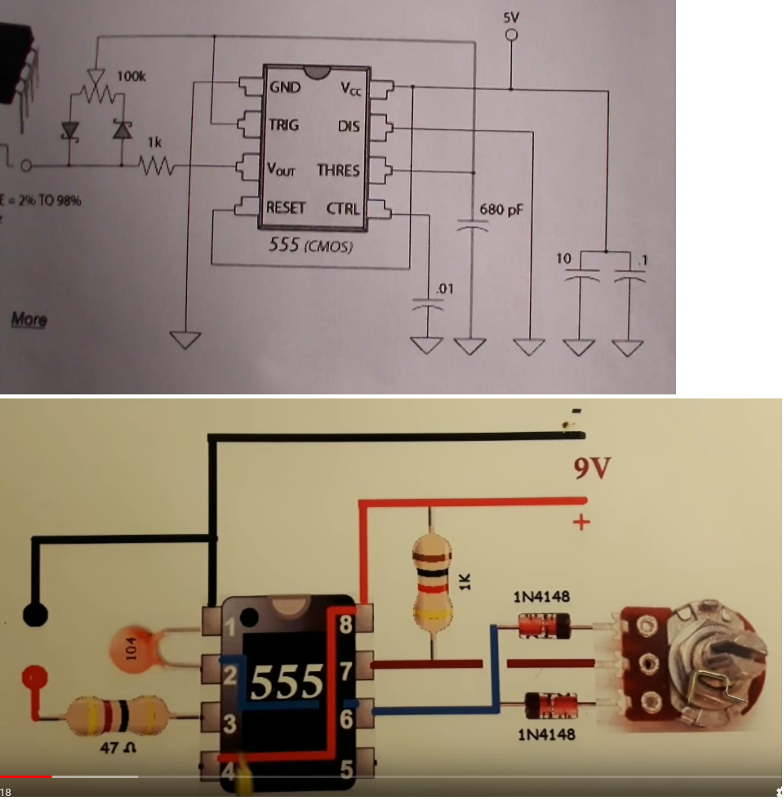
Существует много схем для генерации ШИМ сигнала. Одна из самых простых – это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
Напряжение питания схемы VCC может быть в диапазоне 5 – 16 Вольт. В качестве диодов VD1 – VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.
Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д.
VT1 – полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.
Широтно-импульсный модулятор, принцип работы и схема
Широтно-импульсная модуляция (ШИМ, английская аббревиатураPWM – Pulse-Width Modulation) – это способ кодирования аналогового сигнала путем изменения ширины (длительности) прямоугольных импульсов несущей частоты. На рис.1 представлены типичные графики ШИМ-сигнала.
Так как при ШИМ частота импульсов, а значит, и период (Т) остаются неизменными, то при уменьшении ширины импульса (t) увеличивается пауза между импульсами (рис.16) и наоборот, при расширении импульса пауза сужается (рис.1в).
Если ШИМ-сигнал пропустить через фильтр низших частот (ФНЧ), то уровень постоянного напряжения на выходе фильтра будет определяться скважностью импульсов ШИМ. Скважность Q – это отношение периода импульсов Т к их длительности t, т.е. Формула:
Величина, обратная скважности, которая также встречается в литературе, называется “коэффициентом заполнения” (К3). Назначение ФНЧ – не пропускать на выход несущую частоту ШИМ.
Сам фильтр может состоять из простейшей интегрирующей RC-цепочки или же отсутствовать вовсе, например, если нагрузка имеет достаточную инерцию.
Рис. 1. Графики работы ШИМ.
Таким образом, с помощью двух логических уровней “1 ” и “0” можно получить любое промежуточное значение аналогового сигнала. Широтно-импульсная модуляция широко используется в современной электронике, например, в импульсных источниках питания или в устройствах цифровой обработки звуковых сигналов. В [1] описан широтно-импульсный модулятор на одной КМОП-микросхеме.
Он выполнен на основе двух логических элементов (рис.2) микросхемы К176ЛП1 (рис.За), которая называется универсальным логическим элементом (зарубежный аналог – CD4007).
Универсальность ИМС заключается в том, что она может быть использована и как три самостоятельных элемента НЕ, и как элемент ЗИЛИ-НЕ (рис.Зб), и как элемент НЕ с большим коэффициентом разветвпения (рис.Зв).
Рис. 2. Широтно-импульсный модулятор на одной КМОП-микросхеме.
Рис. 3. Структура микросхемы К176ЛП1.
Микросхема содержит шесть МОП-транзисторов, три из которых (VT1…VT3) – с п-каналом, три других (VT4… VT6)-с р-каналом. Напряжение питания подают на выводы 14 (+9 В) и 7 (общий), выводы 6, 3 и 10 – входы, остальные – выходы.
Разные по функциональному назначению логические элементы получают путем соответствующих соединений входных и выходных выводов. Модулятор (рис.2) изменяет коэффициент заполнения импульсов автогенератора в соответствии с управляющим напряжением.
Регулирование коэффициента заполнения обеспечивается шунтированием времязадающего резистора R2 сопротивлением каналов полевых транзисторов VТ1 и VТ2, входящих в состав микросхемы.
Коэффициент заполнения изменяется в пределах от 1 до 99% периода рабочей частоты. Недостатком этого генератора является ненадежный запуск при уменьшении емкости времязадающего конденсатора С1 (при увеличении частоты генерации).
Для устранения этого недостатка предлагаю выполнить широтно-импульсный модулятор на трех логических элементах (рис. 4). Трехэлементный генератор запускается в любом случае, а конденсатор просто снижает его частоту. Широтно-импульсный модулятор построен на микросхеме DD2 и инверторе DD1.
4). Трехэлементный генератор запускается в любом случае, а конденсатор просто снижает его частоту. Широтно-импульсный модулятор построен на микросхеме DD2 и инверторе DD1.
Полевые транзисторы VТ1 и VТ2 из состава микросхемы подключены через диоды VD1 и VD2 параллельно резистору R2.
Рис. 4. Широтно-импульсный модулятор на трех логических элементах.
При высоком уровне на выходе генератора диод VD2 открывается, т.е. сопротивление п-канала VТ2 включается параллельно R2. Подобным образом сопротивление р-канала VТ1 включается через VD1 параллельно R2 при низком уровне на выходе генератора.
Широтно-импульсный модулятор измененяет коэффициент заполнения импульсов генератора в соответствии с управляющим напряжением. Само изменение частоты колебаний минимально зависит от коэффициента заполнения, т.к. сопротивление канала одного транзистора возрастает, а другого уменьшается при любой величине управляющего напряжения. Таким образом, среднее за период значение шунтирующего резистор R2 сопротивления остается постоянным.
Увеличение управляющего напряжения, поступающего на модулятор, приводит к увеличению длительности выходных импульсов, уменьшение – наоборот. Частота колебаний остается неизменной. Данный генератор может генерировать сигнал частотой до 10 МГц.
В. Калашник, г. Воронеж. E-mail: kalaviv[a]mail.ru. РМ-07-12.
Литература:
- Широтно-импульсный модулятор на одной КМОП микросхеме. – Электроника, 1977, №13, С.55.
- Генераторы на элементах КМОП. – Схемотехника, 2007, №6, С.37.
СХЕМА ШИМ РЕГУЛЯТОРА
Регулировка оборотов электродвигателей в современной электронной технике достигается не изменением питающего напряжения, как это делалось раньше, а подачей на электромотор импульсов тока, разной длительности. Для этих целей и служат, ставшие в последнее время очень популярными – ШИМ (широтно-импульсно модулируемые) регуляторы. Схема универсальная – она же и регулятор оборотов мотора, и яркости ламп, и силы тока в зарядном устройстве.
Схема ШИМ регулятора
Указанная схема отлично работает, печатная плата прилагается.
Без переделки схемы напряжение можно поднимать до 16 вольт. Транзистор ставить в зависимости от мощности нагрузки.
Можно собрать ШИМ регулятор и по такой электрической схеме, с обычным биполярным транзистором:
А при необходимости, вместо составного транзистора КТ827 поставить полевой IRFZ44N, с резистором R1 – 47к. Полевик без радиатора, при нагрузке до 7 ампер, не греется.
Работа ШИМ регулятора
Таймер на микросхеме NE555 следит за напряжением на конденсаторе С1, которое снимает с вывода THR. Как только оно достигнет максимума – открывается внутренний транзистор. Который замыкает вывод DIS на землю. При этом на выходе OUT появляется логический ноль. Конденсатор начинает разряжаться через DIS и когда напряжение на нем станет равно нулю – система перекинется в противоположное состояние — на выходе 1, транзистор закрыт. Конденсатор начинает снова заряжаться и все повторяется вновь.
Конденсатор начинает снова заряжаться и все повторяется вновь.
Заряд конденсатора С1 идет по пути: «R2->верхнее плечо R1 ->D2«, а разряд по пути: D1 -> нижнее плечо R1 -> DIS. Когда вращаем переменный резистор R1, у нас меняются соотношения сопротивлений верхнего и нижнего плеча. Что, соответственно, меняет отношение длины импульса к паузе. Частота задается в основном конденсатором С1 и еще немного зависит от величины сопротивления R1. Меняя отношение сопротивлений заряда/разряда – меняем скважность. Резистор R3 обеспечивает подтяжку выхода к высокому уровню — так так там выход с открытым коллектором. Который не способен самостоятельно выставить высокий уровень.
Рекомендации по сборке и настройке
Диоды можно ставить любые, конденсаторы примерно такого номинала, как на схеме. Отклонения в пределах одного порядка не влияют существенно на работу устройства. На 4.7 нанофарадах, поставленных в С1, например, частота снижается до 18кГц, но ее почти не слышно.
Если после сборки схемы греется ключевой управляющий транзистор, то скорее всего он полностью не открывается. То есть на транзисторе большое падение напряжения (он частично открыт) и через него течет ток. В результате рассеивается большая мощность, на нагрев. Желательно схему параллелить по выходу конденсаторами большой емкости, иначе будет петь и плохо регулировать. Чтобы не свистел – подбирайте С1, свист часто идет от него. В общем область применения очень широкая, особенно перспективным будет её использование в качестве регулятора яркости мощных светодиодных ламп, LED лент и прожекторов, но про это в следующий раз. Статья написана при поддержке ear, ur5rnp, stalker68.
Форум по широтно-импульсным регуляторам
Форум по обсуждению материала СХЕМА ШИМ РЕГУЛЯТОРА
Регулятор напряжения на шим контроллере. Широтно-импульсный регулятор для автомобиля
С микросхемой NE555 (аналог КР1006) знаком каждый радиолюбитель.
Её универсальность позволяет конструировать самые разнообразные самоделки: от простого одновибратора импульсов с двумя элементами в обвязке до многокомпонентного модулятора. В данной статье будет рассмотрена схема включения таймера в режиме генератора прямоугольных импульсов с широтно-импульсной регулировкой.
Схема и принцип её работы
С развитием мощных светодиодов NE555 снова вышла на арену в роли регулятора яркости (диммера), напомнив о своих неоспоримых преимуществах. Устройства на её основе не требуют глубоких знаний электроники, собираются быстро и работают надёжно.
Известно, что управлять яркостью светодиода можно двумя способами: аналоговым и импульсным. Первый способ предполагает изменение амплитудного значения постоянного тока через светодиод. Такой способ имеет один существенный недостаток – низкий КПД. Второй способ подразумевает изменение ширины импульсов (скважности) тока с частотой от 200 Гц до нескольких килогерц. На таких частотах мерцание светодиодов незаметно для человеческого глаза. Схема ШИМ-регулятора с мощным выходным транзистором показана на рисунке. Она способна работать от 4,5 до 18 В, что свидетельствует о возможности управления яркостью как одного мощного светодиода, так и целой светодиодной лентой. Диапазон регулировки яркости колеблется от 5 до 95%. Устройство представляет собой доработанную версию генератора прямоугольных импульсов. Частота этих импульсов зависит от ёмкости C1 и сопротивлений R1, R2 и определяется по формуле: f=1/(ln2*(R1+2*R2)*C1), Гц
Схема ШИМ-регулятора с мощным выходным транзистором показана на рисунке. Она способна работать от 4,5 до 18 В, что свидетельствует о возможности управления яркостью как одного мощного светодиода, так и целой светодиодной лентой. Диапазон регулировки яркости колеблется от 5 до 95%. Устройство представляет собой доработанную версию генератора прямоугольных импульсов. Частота этих импульсов зависит от ёмкости C1 и сопротивлений R1, R2 и определяется по формуле: f=1/(ln2*(R1+2*R2)*C1), Гц
Принцип действия электронного регулятора яркости заключается в следующем. В момент подачи напряжения питания начинает заряжаться конденсатор по цепи: +Uпит – R2 – VD1 –R1 –C1 – -U пит. Как только напряжение на нём достигнет уровня 2/3U пит откроется внутренний транзистор таймера и начнется процесс разрядки. Разряд начинается с верхней обкладки C1 и далее по цепи: R1 – VD2 –7 вывод ИМС – -U пит. Достигнув отметки 1/3U пит транзистор таймера закроется и C1 вновь начнет набирать ёмкость. В дальнейшем процесс повторяется циклически, формируя на выводе 3 прямоугольные импульсы.![]()
Изменение сопротивления подстроечного резистора приводит к уменьшению (увеличению) времени импульса на выходе таймера (вывод 3), и как следствие, уменьшается (увеличивается) среднее значение выходного сигнала. Сформированная последовательность импульсов через токоограничивающий резистор R3 поступает на затвор VT1, который включен по схеме с общим истоком. Нагрузка в виде светодиодной ленты или последовательно включенных мощных светодиодов включается в разрыв цепи стока VT1.
В данном случае установлен мощный MOSFET транзистор с максимальным током стока 13А. Это позволяет управлять свечением светодиодной ленты длиной в несколько метров. Но при этом транзистору может потребоваться теплоотвод.
Блокирующий конденсатор C2 исключает влияние помех, которые могут возникать по цепи питания в моменты переключения таймера. Величина его ёмкости может быть любой в пределах 0,01-0,1 мкФ.
Плата и детали сборки регулятора яркости
Односторонняя печатная плата имеет размер 22х24 мм.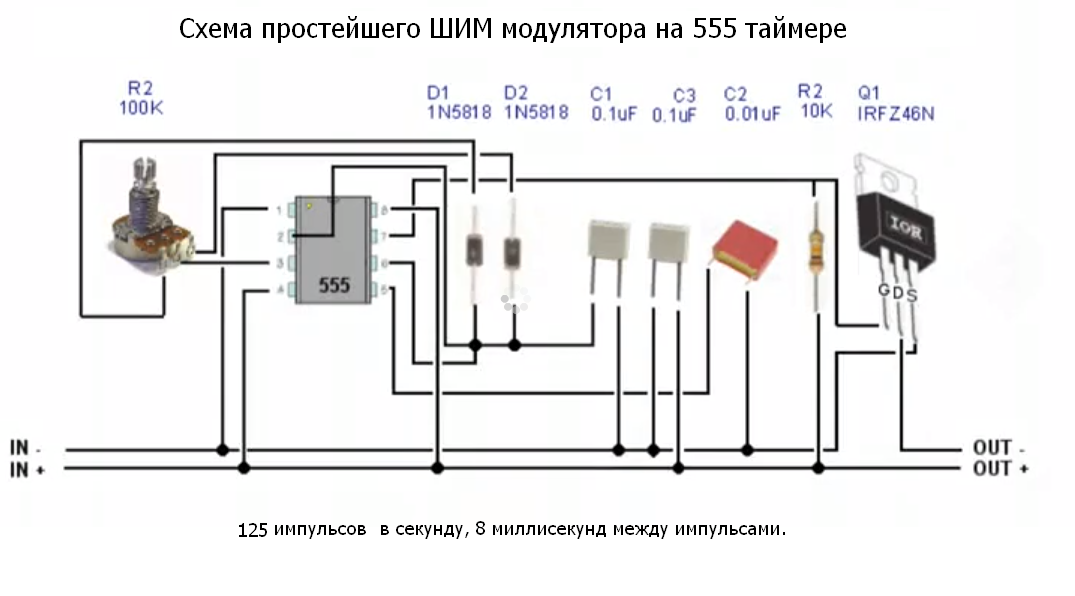 Как видно из рисунка на ней нет ничего лишнего, что могло бы вызвать вопросы.
Как видно из рисунка на ней нет ничего лишнего, что могло бы вызвать вопросы.
После сборки схема ШИМ-регулятора яркости не требует наладки, а печатная плата легка в изготовке своими руками. В плате, кроме подстроечного резистора, используются SMD элементы.
- DA1 – ИМС NE555;
- VT1 – полевой транзистор IRF7413;
- VD1,VD2 – 1N4007;
- R1 – 50 кОм, подстроечный;
- R2, R3 – 1 кОм;
- C1 – 0,1 мкФ;
- C2 – 0,01 мкФ.
Транзистор VT1 должен подбираться в зависимости от мощности нагрузки. Например, для изменения яркости одноваттного светодиода достаточно будет биполярного транзистора с максимально допустимым током коллектора 500 мА.
Управление яркостью светодиодной ленты должно осуществляться от источника напряжения +12 В и совпадать с её напряжением питания. В идеале регулятор должен питаться от стабилизированного блока питания, специально предназначенного для ленты.
Нагрузка в виде отдельных мощных светодиодов запитывается иначе. В этом случае источником питания диммера служит стабилизатор тока (его еще называют драйвер для светодиода). Его номинальный выходной ток должен соответствовать току последовательно включенных светодиодов.
В этом случае источником питания диммера служит стабилизатор тока (его еще называют драйвер для светодиода). Его номинальный выходной ток должен соответствовать току последовательно включенных светодиодов.
Читайте так же
Широтно – импульсные регуляторы постоянного тока
Необходимость регулировки постоянного напряжения для
питания мощных инерционных нагрузок чаще всего возникает у владельцев
автомобилей и другой авто-мото техники. Например, появилось
желание плавно менять яркость ламп освещения салона, габаритных
огней, автомобильных фар или вышел из строя узел регулирования
оборотов вентилятора автомобильного кондиционера, а замены нет.
Осуществить такое желание иногда нет возможности из-за большого тока
потребления этими устройствами – если устанавливать транзисторный
регулятор напряжения, компенсационный или параметрический, на регулирующем
транзисторе будет выделяться очень большая мощность, что потребует установки
больших радиаторов или введения принудительного охлаждения с помощью
малогабаритного вентилятора от компьютерных устройств. Выходом из
положения является применение широтно – импульсных схем, управляющих
мощными полевыми силовыми транзисторами
MOSFET
.
Эти транзисторы могут коммутировать очень большие токи (до 160А и более)
при напряжении на затворе 12 – 15 В. Сопротивление открытого транзистора
очень мало, что позволяет заметно снизить рассеиваемую мощность. Схемы
управления должны обеспечивать разность напряжений между затвором и истоком не
менее 12 … 15 В, в противном случае сопротивление канала сильно увеличивается
и рассеиваемая мощность значительно возрастает, что может привести
перегреву транзистора и выходу его из строя. Для широтно –
импульсных автомобильных низковольтных регуляторов
выпускаются специализированные микросхемы, например U
6080B
… U6084B
, L9610, L9611,
которые содержат узел повышения выходного напряжения до 25 -30 В при
напряжении питания 7 -14 В, что позволяет включать выходной транзистор по
схеме с общим стоком, чтобы можно было подключать нагрузку с общим
минусом, но достать их практически невозможно.
Выходом из
положения является применение широтно – импульсных схем, управляющих
мощными полевыми силовыми транзисторами
MOSFET
.
Эти транзисторы могут коммутировать очень большие токи (до 160А и более)
при напряжении на затворе 12 – 15 В. Сопротивление открытого транзистора
очень мало, что позволяет заметно снизить рассеиваемую мощность. Схемы
управления должны обеспечивать разность напряжений между затвором и истоком не
менее 12 … 15 В, в противном случае сопротивление канала сильно увеличивается
и рассеиваемая мощность значительно возрастает, что может привести
перегреву транзистора и выходу его из строя. Для широтно –
импульсных автомобильных низковольтных регуляторов
выпускаются специализированные микросхемы, например U
6080B
… U6084B
, L9610, L9611,
которые содержат узел повышения выходного напряжения до 25 -30 В при
напряжении питания 7 -14 В, что позволяет включать выходной транзистор по
схеме с общим стоком, чтобы можно было подключать нагрузку с общим
минусом, но достать их практически невозможно. Для большинства нагрузок,
которые потребляют ток не более 10А и не могут вызвать просадку бортового
напряжения можно использовать простые схемы без дополнительного узла повышения
напряжения. Такие схемы рассмотрены в этом разделе.
Для большинства нагрузок,
которые потребляют ток не более 10А и не могут вызвать просадку бортового
напряжения можно использовать простые схемы без дополнительного узла повышения
напряжения. Такие схемы рассмотрены в этом разделе.
Первый ШИМ регулятор собран на
инверторах логической КМОП
микросхемы. Схема представляет собой генератор прямоугольных
импульсов на двух логических элементах, в котором за счёт диодов
раздельно меняется постоянная времени заряда и разряда
частотозадающего конденсатора, что позволяет изменять скважность
выходных импульсов и значение эффективного напряжения на нагрузке.
В схеме можно использовать любые инвертирующие КМОП элементы, например
К176ПУ2, К561ЛН1, а также любые элементы И, ИЛИ-НЕ, например
К561ЛА7, К561ЛЕ5 и подобные, соответственно сгруппировав их входы.
Полевой транзистор может быть любым из
MOSFET
,
которые выдерживают максимальный ток нагрузки, но желательно
использовать транзистор с как можно большим максимальным током, т.к. у
него меньшее сопротивление открытого канала, что уменьшает рассеиваемую
мощность и позволяет использовать радиатор меньшей площади.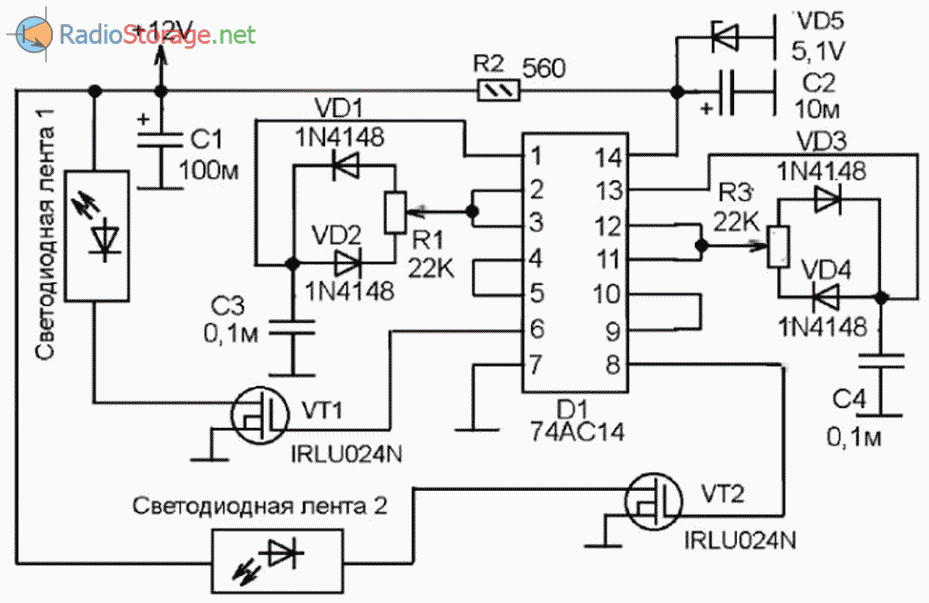 Достоинство схемы – простота и доступность элементов, недостатки – диапазон изменения выходного напряжения чуть
меньше 100% и невозможно доработать схему с целью
введения дополнительных режимов, например плавного автоматического
увеличения или понижения напряжения на нагрузке, т.к. регулирование производится путём изменения
сопротивления переменного резистора, а не изменением уровня
управляющего напряжения.
Достоинство схемы – простота и доступность элементов, недостатки – диапазон изменения выходного напряжения чуть
меньше 100% и невозможно доработать схему с целью
введения дополнительных режимов, например плавного автоматического
увеличения или понижения напряжения на нагрузке, т.к. регулирование производится путём изменения
сопротивления переменного резистора, а не изменением уровня
управляющего напряжения.
Гораздо лучшими характеристиками обладает вторая схема, но количество
элементов в ней чуть больше. Регулировка эффективного значения
напряжения на нагрузке от 0 до 12 В производится изменением
напряжения на управляющем входе от 8 до 12 В. Диапазон
регулировки напряжения практически 100%. Максимальный
ток нагрузки полностью определяется типом силового полевого
транзистора и может быть очень значительным. Так как выходное напряжение
пропорционально входному управляющему напряжению, схема может
использоваться как составная часть системы регулирования,
например системы поддержания заданной температуры, если в
качестве нагрузки использовать нагреватель, а датчик
температуры подключить к простейшему пропорциональному регулятору, выход
которого подключается к управляющему входу устройства. Описанные
устройства имеют в основе несимметричный мультивибратор, но ШИМ
регулятор можно построить на микросхеме ждущего мультивибратора, как
показано на следующей странице.
Описанные
устройства имеют в основе несимметричный мультивибратор, но ШИМ
регулятор можно построить на микросхеме ждущего мультивибратора, как
показано на следующей странице.
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Фото – мощный регулятор для асинхронного двигателяСамый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Фото – регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств. В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
- Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.

Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
Фото – шим контроллер оборотов
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Фото – схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Фото – синусоида нормальной работы электродвигателя
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
- Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе.
 Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт; - Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
Фото – схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
Фото – схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
ШИМ регулятор предназначен для регулирования скорости вращения полярного двигателя,яркости освещения лампочки или мощностью нагревательного элемента.
Преимущества:
1 Простота изготовления
2 Доступность компонентов(стоимость не превышает 2$)
3 Широкое применение
4 Для новичков лишний раз потренироваться и порадовать себя=)
Однажды понадобился мне “девайс” для регулировки скорости вращения кулера. Для чего именно уже не помню. С начала пробовал через обычный переменный резистор, он сильно грелся и это было не приемлемо для меня. В итоге покопавшись в интернете нашел схему на мне уже знакомой микросхеме NE555. Это была схема обычного ШИМ регулятора с скважностью (длительностью) импульсов равной или меньше 50% (позже приведу графики как это работает). Схема оказалось очень простой и не требовала настройки, главное было не накосячить с подключением диодов и транзистора. Первый раз его собрал на макетной плате и испытал, все заработало с пол оборота. Позже уже развел небольшую печатную плату и аккуратнее все выглядело=) Ну теперь взглянем на саму схему!
В итоге покопавшись в интернете нашел схему на мне уже знакомой микросхеме NE555. Это была схема обычного ШИМ регулятора с скважностью (длительностью) импульсов равной или меньше 50% (позже приведу графики как это работает). Схема оказалось очень простой и не требовала настройки, главное было не накосячить с подключением диодов и транзистора. Первый раз его собрал на макетной плате и испытал, все заработало с пол оборота. Позже уже развел небольшую печатную плату и аккуратнее все выглядело=) Ну теперь взглянем на саму схему!
Схема ШИМ регулятора
Из нее мы видим что это обычный генератор с регулятором скважности импульсов собранный по схеме из даташита. Резистором R1 мы и меняем эту скважность, резистор R2 служит нам защитой от КЗ, так как 4 вывод микросхемы через внутренний ключ таймера подключен на землю и при крайнем положении R1 он просто замкнет. R3 это подтягивающий резистор. С2 это задающий частоту конденсатор. Транзистор IRFZ44N – это N канальный мосфет.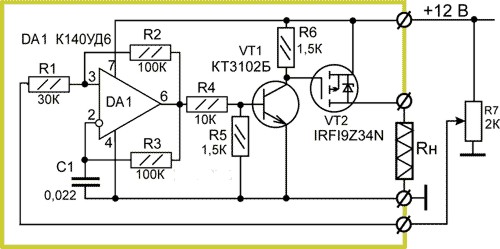 D3 – это защитный диод который предотвращает выхода из строя полевик при обрыве нагрузки. Теперь немного о скважности импульсов. Скважность импульса – это отношение его периода следования (повторения) к длительности импульса, то есть через определенный промежуток времени будет происходить переход от (грубо говоря) плюса к минусу, а точнее от логической единицы к логическому нулю. Так вот этот промежуток времени между импульсами и есть та самая скважность.
D3 – это защитный диод который предотвращает выхода из строя полевик при обрыве нагрузки. Теперь немного о скважности импульсов. Скважность импульса – это отношение его периода следования (повторения) к длительности импульса, то есть через определенный промежуток времени будет происходить переход от (грубо говоря) плюса к минусу, а точнее от логической единицы к логическому нулю. Так вот этот промежуток времени между импульсами и есть та самая скважность.
Скважность при среднем положении R1
Скважность при крайнем левом положении R1
Скважность при крайнем правом положении R
Ниже приведу печатные платы с расположением деталей и без них
Теперь немного о деталях и их вид. Сама микросхема выполнена в DIP-8 корпусе, конденсаторы керамические малогабаритные, резисторы на 0,125-0,25 ватт. Диоды обычные выпрямительные на 1А (самое доступное это 1N4007 их везде навалом). Так же микросхему можно устанавливать на панельку, если в будущем вы хотите ее использовать в других проектах и лишний раз не выпаивать ее.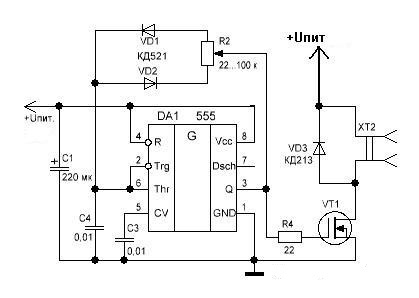 Ниже приведу фотографии деталей.
Ниже приведу фотографии деталей.
Цифровой ШИМ регулятор оборотов коллекторного двигателя. kirich56 пишет в 9 июня, 2015
CCM5D Digital DC Motor Speed Controller/PWM Stepless Speed Control Switch Black Цена $14.47
Товар получен бесплатно для обзора
Еще один обзор на тему всяких вещей для самоделок. На этот раз я расскажу о цифровом регуляторе оборотов. Вещица по своему интересная, но хотелось большего.
Кому интересно, читайте дальше:)
Имея в хозяйстве некоторые низковольтные устройства типа небольшой шлифовальной машинки и т.п. я захотел немного увеличить их функциональный и эстетический вид. Правда это не получилось, хотя я надеюсь все таки добиться своего, возможно в другой раз, на за саму вещицу расскажу сегодня.
Производитель данного регулятора фирма Maitech, вернее именно это название часто встречается на всяких платках и блочках для самоделок, хотя сайт этой фирмы почему то мне не попался.
Из-за того, что я не сделал в итоге то, что хотел, обзор будет короче обычного, но начну как всегда с того, как это продается и присылается.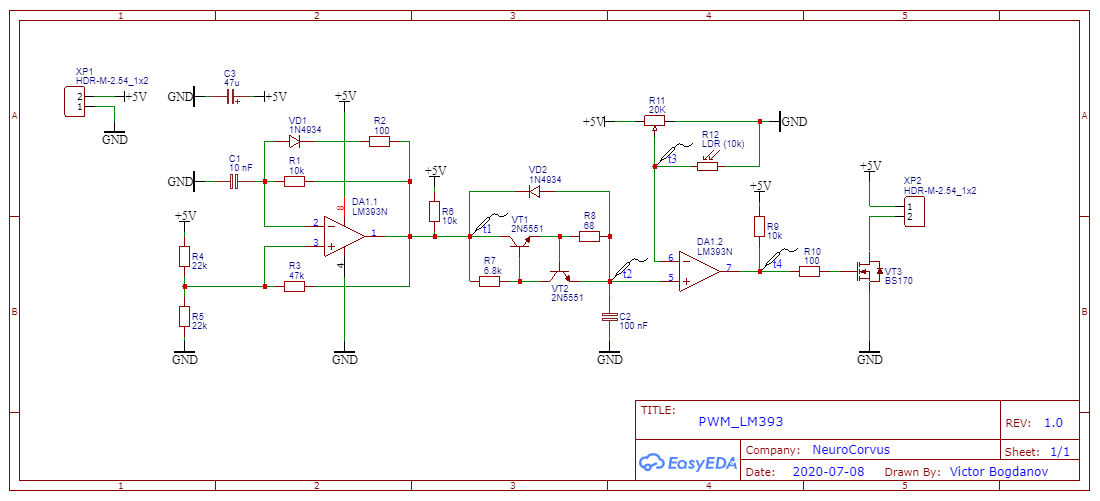
В конверте лежал обычный пакетик с защелкой.
В комплекте только регулятор с переменным резистором и кнопкой, жесткой упаковки и инструкции нет, но доехало все целым и без повреждений.
Сзади присутствует наклейка, заменяющая инструкцию. В принципе большего для такого устройства и не требуется.
Указан рабочий диапазон напряжения 6-30 Вольт и максимальный ток в 8 Ампер.
Внешний вид весьма неплох, темное “стекло”, темно-серый пластик корпуса, в выключенном состоянии кажется вообще черным. По внешнему виду зачет, придраться не к чему. Спереди была приклеена транспортировочная пленка.
Установочные размеры устройства:
Длина 72мм (минимальное отверстие в корпусе 75мм), ширина 40мм, глубина без учета передней панели 23мм (с передней панелью 24мм).
Размеры передней панели:
Длина 42.5,мм ширина 80мм
Переменный резистор идет в комплекте с ручкой, ручка конечно грубовата, но для применения вполне сойдет.
Сопротивление резистора 100КОм, зависимость регулировки – линейная.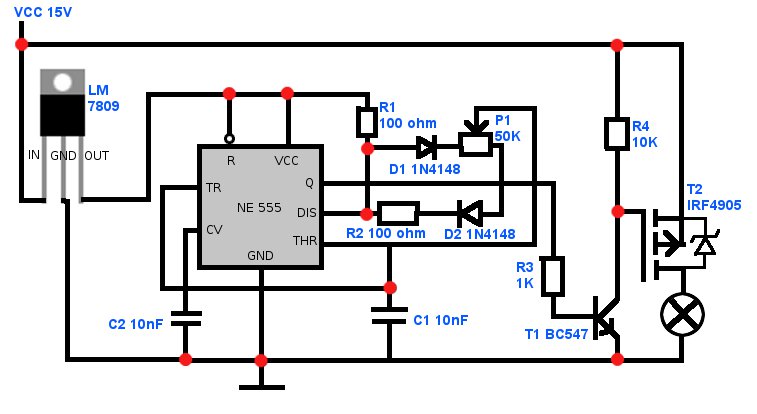
Как потом выяснилось, 100КОм сопротивление дает глюк. При питании от импульсного БП невозможно выставить стабильные показания, сказывается наводка на провода к переменному резистору, из-за чего показания скачут +\- 2 знака, но ладно бы скакали, вместе с этим скачут обороты двигателя.
Сопротивление резистора высокое, ток маленький и провода собирают все помехи вокруг.
При питании от линейного БП такая проблема отсутствует полностью.
Длина проводов к резистору и кнопке около 180мм.
Кнопка, ну тут ничего особенного. Контакты нормально открытые, установочный диаметр 16мм, длина 24мм, подсветки нет.
Кнопка выключает двигатель.
Т.е. при подаче питания индикатор включается, двигатель запускается, нажатие на кнопку его выключает, второе нажатие включает опять.
Когда двигатель выключен то индикатор так же не светится.
Под крышкой находится плата устройства.
На клеммы выведены контакты питания и подключения двигателя.
Плюсовые контакты разъема соединены вместе, силовой ключ коммутирует минусовой провод двигателя.
Подключение переменного резистора и кнопки разъемное.
На вид все аккуратно. Выводы конденсатора немного кривоваты, но я думаю что это можно простить:)
Индикатор довольно большой, высота цифры 14мм.
Размеры платы 69х37мм.
Плата собрана аккуратно, около контактов индикатора присутствуют следы флюса, но в целом плата чистая.
На плате присутствуют: диод для защиты от переполюсовки, стабилизатор 5 Вольт, микроконтроллер, конденсатор 470мкФ 35 Вольт, силовые элементы под небольшим радиатором.
Так же видны места под установку дополнительных разъемов, назначение их непонятно.
Набросал небольшую блок-схему, просто для примерного понимания что и как коммутируется и как подключается. Переменный резистор так и включен одной ногой к 5 Вольт, второй на землю. потому его можно спокойно заменить на более низкий номинал. На схеме нет подключений к нераспаянному разъему.
В устройстве использован микроконтроллер 8s003f3p6 производства STMicroelectronics.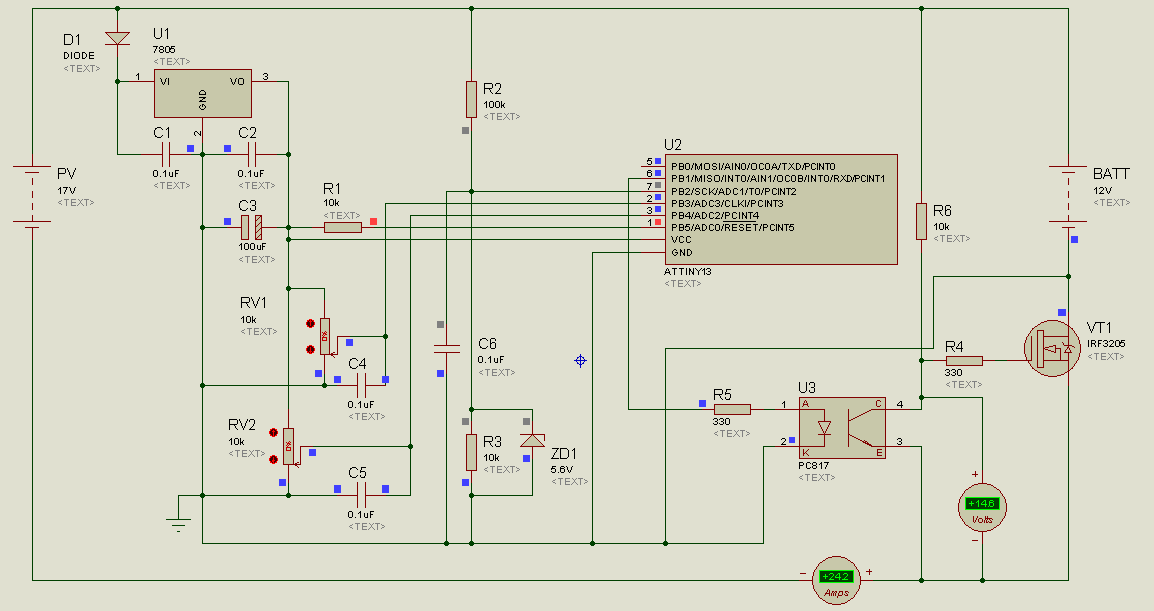 Насколько мне известно, этот микроконтроллер используется в довольно большом количестве разных устройств, например ампервольтметрах.
Насколько мне известно, этот микроконтроллер используется в довольно большом количестве разных устройств, например ампервольтметрах.
Стабилизатор питания 78M05 , при работе на максимальном входном напряжении нагревается, но не очень сильно.
Часть тепла от силовых элементов отводится на медные полигоны платы, слева видно большое количество переходов с одной стороны платы на другую, что помогает отводить тепло.
Так же тепло отводится при помощи небольшого радиатора, который прижат к силовым элементам сверху. Такое размещение радиатора кажется мне несколько сомнительным, так как тепло отводится через пластмассу корпуса и такой радиатор помогает несильно.
Паста между силовыми элементами и радиатором отсутствует, рекомендую снять радиатор и промазать пастой, хоть немного но станет лучше.
В силовой части применен транзистор IRLR7843 , сопротивление канала 3.3мОм, максимальный ток 161 Ампер, но максимальное напряжение всего 30 Вольт, потому я бы рекомендовал ограничивать входное на уровне 25-27 Вольт.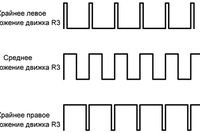 При работе на околомаксимальных токах присутствует небольшой нагрев.
При работе на околомаксимальных токах присутствует небольшой нагрев.
Так же рядом расположен диод, который гасит выбросы тока от самоиндукции двигателя.
Здесь применен STPS1045 10 Ампер, 45 Вольт. К диоду вопросов нет.
Первое включение. Так получилось, что испытания я проводил еще до снятия защитной пленки, потому на этих фото она еще есть.
Индикатор контрастный, в меру яркий, читается отлично.
Сначала я решил попробовать на мелких нагрузках и получил первое разочарование.
Нет, претензий к производителю и магазину у меня нет, просто я надеялся, что в таком относительно недешевом устройстве будет присутствовать стабилизация оборотов двигателя.
Увы, это просто регулируемый ШИМ, на индикаторе отображается % заполнения от 0 до 100%.
Мелкого двигателя регулятор даже не заметил, дня него это совсем смешной ток нагрузки:)
Внимательные читатели наверняка обратили внимание на сечение проводов, которыми я подключил питание к регулятору.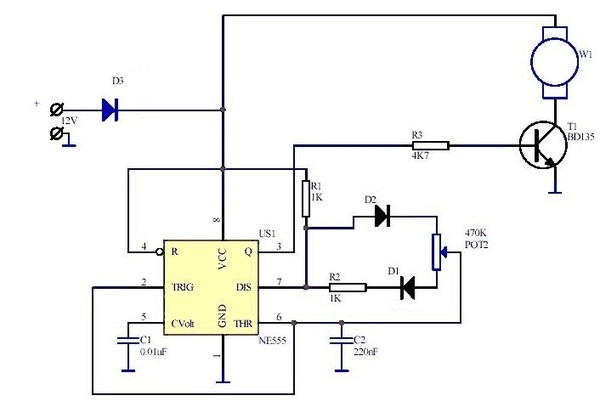
Да, дальше я решил подойти к вопросу более глобально и подключил более мощный двигатель.
Он конечно заметно мощнее регулятора, но на холостом ходу его ток около 5 Ампер, что позволило проверить регулятор на режимах более приближенных к максимальным.
Регулятор вел себя отлично, кстати я забыл указать что при включении регулятор плавно увеличивает заполнение ШИМ от нуля до установленного значения обеспечивая плавный разгон, на индикаторе при этом сразу показывается установленное значение, а не как на частотных приводах, где отображается реальное текущее.
Регулятор не вышел из строя, немного нагрелся, но не критично.
Так как регулятор импульсный, то я решил просто ради интереса потыкаться осциллографом и посмотреть что происходит на затворе силового транзистора в разных режимах.
Частота работы ШИМа около 15 КГц и не меняется в процессе работы. Двигатель заводится примерно при 10% заполнения.
Изначально я планировал поставить регулятор в свой старый (скорее уже древний) блок питания для мелкого электроинструмента (о нем как нибудь в другой раз). по идее он должен был стать вместо передней панели, а на задней должен был расположиться регулятор оборотов, кнопку ставить не планировал (благо при включении устройство сразу переходит в режим – включено).
по идее он должен был стать вместо передней панели, а на задней должен был расположиться регулятор оборотов, кнопку ставить не планировал (благо при включении устройство сразу переходит в режим – включено).
Должно было получиться красиво и аккуратно.
Но дальше меня ждало некоторое разочарование.
1. Индикатор хоть и был немного меньше по габаритам чем вставка передней панели, но хуже было то, что он не влазил по глубине упираясь в стойки для соединения половинок корпуса.
и если пластмассу корпуса индикатора можно было срезать, то не стал бы все равно, так как дальше мешала плата регулятора.
2. Но даже если бы первый вопрос я бы решил, то была вторая проблема, я совсем забыл как у меня сделан блок питания. Дело в том, что регулятор рвет минус питания, а у меня дальше по схеме стоит реле реверса, включения и принудительной остановки двигателя, схема управления всем этим. И с их переделкой оказалось все куда сложнее:(
Если бы регулятор был со стабилизацией оборотов, то я бы все таки заморочился и переделал схему управления и реверса, либо переделал регулятор под коммутацию + питания.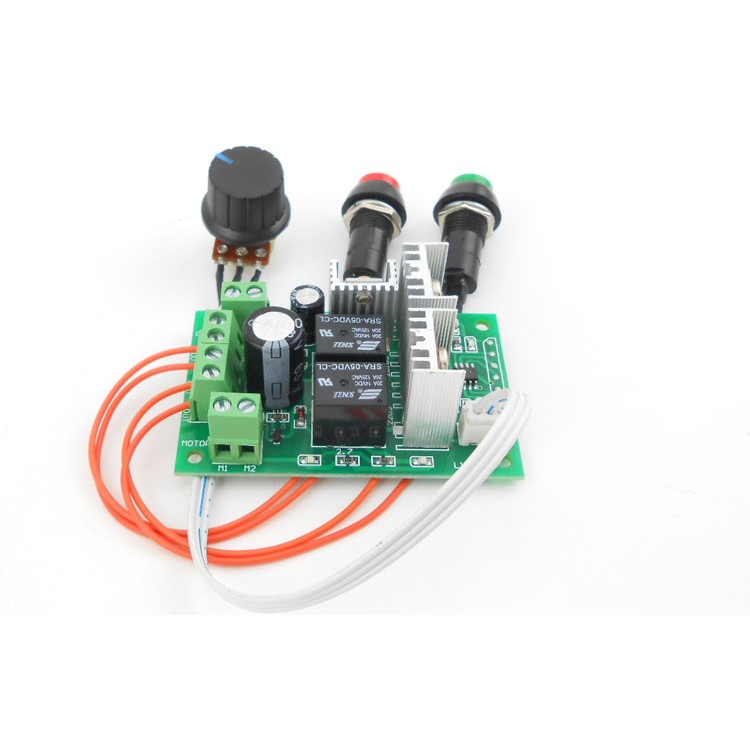 А так можно и переделаю, но уже без энтузиазма и теперь не знаю когда.
А так можно и переделаю, но уже без энтузиазма и теперь не знаю когда.
Может кому интересно, фото внутренностей моего БП, собирался он лет так около 13-15 назад, почти все время работал без проблем, один раз пришлось заменить реле.
Резюме.
Плюсы
Устройство полностью работоспособно.
Аккуратный внешний вид.
Качественная сборка
В комплект входит все необходимое.
Минусы
Некорректная работа от импульсных блоков питания.
Силовой транзистор без запаса по напряжению
При таком скромном функционале завышена цена (но здесь все относительно).
Мое мнение. Если закрыть глаза на цену устройства, то само по себе оно вполне неплохое, и выглядит аккуратно и работает нормально. Да, присутствует проблема не очень хорошей помехозащищенности, думаю что решить ее несложно, но немного расстраивает. Кроме того рекомендую не превышать входное напряжение выше 25-27 Вольт.
Больше расстраивает то, что я довольно много смотрел варианты всяких готовых регуляторов, но нигде не предлагают решение со стабилизацией оборотов. Возможно кто то спросит, зачем мне это. Объясню, как то попала в руки шлифовальная машинка со стабилизацией, работать гораздо приятнее чем обычной.
Возможно кто то спросит, зачем мне это. Объясню, как то попала в руки шлифовальная машинка со стабилизацией, работать гораздо приятнее чем обычной.
На этом все, надеюсь что было интересно:)
Motor Control: ШИМ-регулятор
Управление двигателем постоянного тока проще всего организовать с помощью ШИМ – регулятора. ШИМ – это широтно-импульсная модуляция, в английском языке это называется PWM — Pulse Width Modulation. Теорию я подробно объяснять не буду, информации полно в интернете. Своими словами – если у нас есть двигатель постоянного тока на 12 вольт – то мы можем регулировать обороты двигателя изменяя напряжение питания. Изменяя напряжение питания от нуля до 12 вольт будут изменятся обороты двигателя от нуля до максимальных. В случае с ШИМ-регулятором мы будем изменять скважность импульсов от 0 до 100 % и это будет эквивалентно изменению напряжения питания двигателя и соответственно будут изменятся обороты двигателя. Рассмотрим первый ШИМ-регулятор на 5 ампер. Есть такая самая любимая микросхема всех радиолюбителей – это таймер NE555 ( или советский аналог КР1006ВИ). Вот на этой микросхеме и собран ШИМ-регулятор. Кроме таймера здесь я использую стабилизатор на 9 вольт LM7809 , мощный полевой транзистор с N-каналом IRF540, сдвоенный диод Шоттки, а также другие мелкие детали. Схема по которой собран этот регулятор всем известна и очень популярна.
Есть такая самая любимая микросхема всех радиолюбителей – это таймер NE555 ( или советский аналог КР1006ВИ). Вот на этой микросхеме и собран ШИМ-регулятор. Кроме таймера здесь я использую стабилизатор на 9 вольт LM7809 , мощный полевой транзистор с N-каналом IRF540, сдвоенный диод Шоттки, а также другие мелкие детали. Схема по которой собран этот регулятор всем известна и очень популярна.
Печатку этой платы можно скачать – ШИМ 5А
В более мощном исполнении я применяю просто параллельное включение нескольких полевых транзисторов IRF540 и более мощный сдвоенный диод Шоттки. В остальном всё аналогично.
Печатку этой платы можно скачать – ШИМ 10А Подключение ШИМ-регулятора очень простое. Вы видите 4 клеммы – две клеммы для подачи питания и , и две клеммы для подключения мотора и .
Сделал ещё ШИМ-регулятор с защитой по току. Для этих целей использовал распространенный операционный усилитель LM358 и два оптрона PC817.
 При превышении тока, который мы задаём подстроечником R12, срабатывает триггер-защёлка на операционнике DA3.1, оптронах DA4 и DA5 и блокируется генерация импульсов по 5 ноге таймера NE555. Чтобы снова запустить генерацию нужно кратковременно снять питание со схемы с помощью кнопки S1.
При превышении тока, который мы задаём подстроечником R12, срабатывает триггер-защёлка на операционнике DA3.1, оптронах DA4 и DA5 и блокируется генерация импульсов по 5 ноге таймера NE555. Чтобы снова запустить генерацию нужно кратковременно снять питание со схемы с помощью кнопки S1.ШИМ-регуляторы все работоспособны , проверил их работу с помощью двигателя от шуруповёрта.
Снял видео –
Разработал нормальные платы по этим схемам и снял 2 новых видео.
Первое видео –
Второе видео –
Ссылки для заказа таких плат на сайте pcbway
| Определить языкАзербайджанскийАлбанскийАмхарскийАнглийскийАрабскийАрмянскийАфрикаансБаскскийБелорусскийБенгальскийБирманскийБолгарскийБоснийскийВаллийскийВенгерскийВьетнамскийГавайскийГаитянскийГалисийскийГолландскийГреческийГрузинскийГуджаратиДатскийЗулуИвритИгбоИдишИндонезийскийИрландскийИсландскийИспанскийИтальянскийЙорубаКазахскийКаннадаКаталанскийКиргизскийКитайский ТрадКитайский УпрКорейскийКорсиканскийКурманджиКхмерскийКхосаЛаосскийЛатинскийЛатышскийЛитовскийЛюксембургскийМакедонскийМалагасийскийМалайскийМалаяламМальтийскийМаориМаратхиМонгольскийНемецкийНепальскийНорвежскийПанджабиПерсидскийПольскийПортугальскийПуштуРумынскийРусскийСамоанскийСебуанскийСербскийСесотоСингальскийСиндхиСловацкийСловенскийСомалийскийСуахилиСунданскийТаджикскийТайскийТамильскийТелугуТурецкийУзбекскийУкраинскийУрдуФилиппинскийФинскийФранцузскийФризскийХаусаХиндиХмонгХорватскийЧеваЧешскийШведскийШонаШотландский (гэльский)ЭсперантоЭстонскийЯванскийЯпонский | АзербайджанскийАлбанскийАмхарскийАнглийскийАрабскийАрмянскийАфрикаансБаскскийБелорусскийБенгальскийБирманскийБолгарскийБоснийскийВаллийскийВенгерскийВьетнамскийГавайскийГаитянскийГалисийскийГолландскийГреческийГрузинскийГуджаратиДатскийЗулуИвритИгбоИдишИндонезийскийИрландскийИсландскийИспанскийИтальянскийЙорубаКазахскийКаннадаКаталанскийКиргизскийКитайский ТрадКитайский УпрКорейскийКорсиканскийКурманджиКхмерскийКхосаЛаосскийЛатинскийЛатышскийЛитовскийЛюксембургскийМакедонскийМалагасийскийМалайскийМалаяламМальтийскийМаориМаратхиМонгольскийНемецкийНепальскийНорвежскийПанджабиПерсидскийПольскийПортугальскийПуштуРумынскийРусскийСамоанскийСебуанскийСербскийСесотоСингальскийСиндхиСловацкийСловенскийСомалийскийСуахилиСунданскийТаджикскийТайскийТамильскийТелугуТурецкийУзбекскийУкраинскийУрдуФилиппинскийФинскийФранцузскийФризскийХаусаХиндиХмонгХорватскийЧеваЧешскийШведскийШонаШотландский (гэльский)ЭсперантоЭстонскийЯванскийЯпонский |
Звуковая функция ограничена 200 символами
Общие сведения о работе регулятора напряжения
Регулятор напряжения генерирует фиксированное выходное напряжение заданной величины, которое остается постоянным независимо от изменений входного напряжения или условий нагрузки.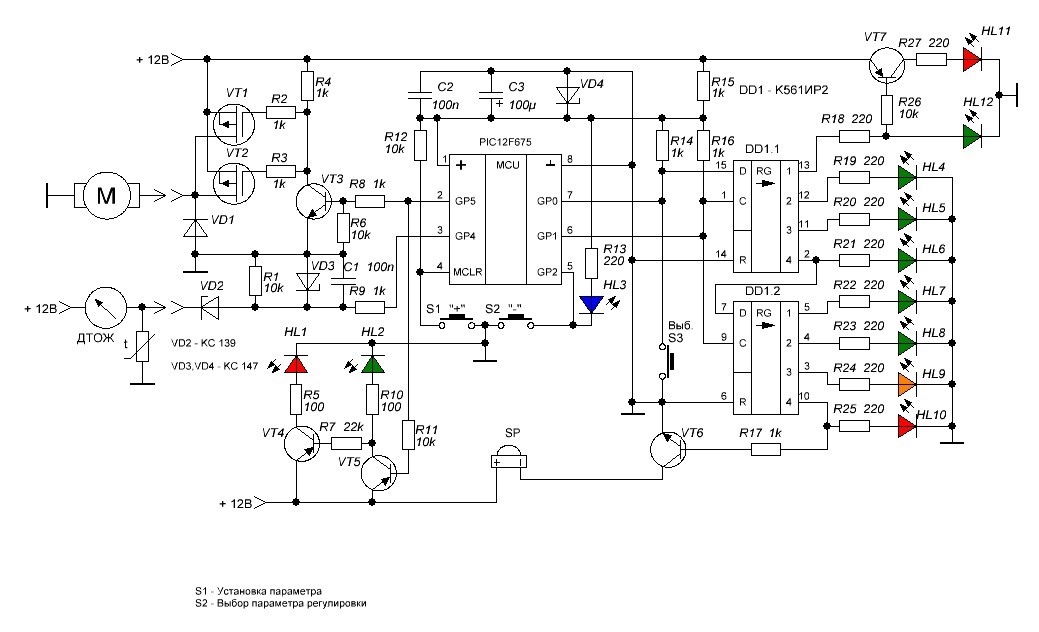 Есть два типа регуляторов напряжения: линейные и импульсные.
Есть два типа регуляторов напряжения: линейные и импульсные.
В линейном регуляторе используется устройство активного (BJT или MOSFET) прохода (последовательное или шунтирующее), управляемое дифференциальным усилителем с высоким коэффициентом усиления. Он сравнивает выходное напряжение с точным эталонным напряжением и регулирует проходное устройство для поддержания постоянного выходного напряжения.
Импульсный стабилизатор преобразует входное постоянное напряжение в коммутируемое напряжение, подаваемое на силовой MOSFET или BJT переключатель. Отфильтрованное выходное напряжение переключателя мощности возвращается в схему, которая управляет временем включения и выключения переключателя питания, так что выходное напряжение остается постоянным независимо от изменений входного напряжения или тока нагрузки.
Каковы некоторые топологии импульсных регуляторов?
Существует три распространенных топологии: понижающая (понижающая), повышающая (повышающая) и понижающая-повышающая (повышающая / понижающая).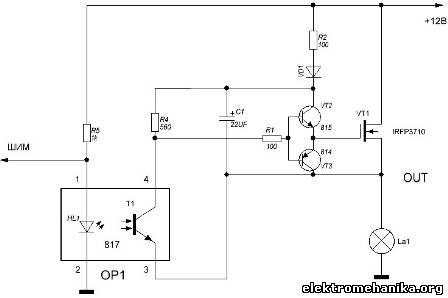 Другие топологии включают обратноходовые, SEPIC, Cuk, двухтактные, прямые, полномостовые и полумостовые топологии.
Другие топологии включают обратноходовые, SEPIC, Cuk, двухтактные, прямые, полномостовые и полумостовые топологии.
Как влияет на конструкцию регулятора частоты коммутации?
Более высокие частоты переключения означают, что в стабилизаторе напряжения можно использовать катушки индуктивности и конденсаторы меньшего размера. Это также означает более высокие коммутационные потери и больший шум в цепи.
Какие потери происходят с импульсным регулятором?
Потери возникают из-за мощности, необходимой для включения и выключения полевого МОП-транзистора, которые связаны с драйвером затвора полевого МОП-транзистора.Кроме того, потери мощности полевого МОП-транзистора возникают из-за того, что переключение из состояния проводимости в состояние непроводимости занимает конечное время. Потери также связаны с энергией, необходимой для заряда и разряда емкости затвора MOSFET между пороговым напряжением и напряжением затвора.
Каковы обычные применения линейных и импульсных регуляторов?
Рассеиваемая мощность линейного регулятора прямо пропорциональна его выходному току при заданном входном и выходном напряжении, поэтому типичный КПД может быть 50% или даже ниже. Используя оптимальные компоненты, импульсный регулятор может достигать КПД в диапазоне 90%. Однако выходной шум линейного регулятора намного ниже, чем импульсный стабилизатор с такими же требованиями к выходному напряжению и току. Обычно импульсный регулятор может управлять более высокими токовыми нагрузками, чем линейный регулятор.
Используя оптимальные компоненты, импульсный регулятор может достигать КПД в диапазоне 90%. Однако выходной шум линейного регулятора намного ниже, чем импульсный стабилизатор с такими же требованиями к выходному напряжению и току. Обычно импульсный регулятор может управлять более высокими токовыми нагрузками, чем линейный регулятор.
Как импульсный регулятор управляет своим выходом?
Для импульсных регуляторов требуются средства для изменения выходного напряжения в ответ на изменения входного и выходного напряжения.Один из подходов – использовать ШИМ, который управляет входом в соответствующий выключатель питания, который контролирует время его включения и выключения (рабочий цикл). Во время работы отфильтрованное выходное напряжение регулятора возвращается на ШИМ-контроллер для управления рабочим циклом. Если отфильтрованный выходной сигнал имеет тенденцию к изменению, обратная связь, подаваемая на ШИМ-контроллер, изменяет рабочий цикл, чтобы поддерживать постоянное выходное напряжение.
Какие проектные характеристики важны для ИС регулятора напряжения?
Среди основных параметров – входное напряжение, выходное напряжение и выходной ток.В зависимости от приложения могут быть важны другие параметры, такие как пульсации напряжения на выходе, переходная характеристика нагрузки, выходной шум и КПД. Важными параметрами линейного регулятора являются падение напряжения, PSRR (коэффициент отклонения источника питания) и выходной шум.
Рекомендации
Загрузить средства проектирования управления питанием
Инструмент для проектирования регуляторов напряжения ADIsimPower ™
Введение в широтно-импульсную модуляцию, управление скоростью и приложения
Использование ШИМ в качестве метода переключения
Широтно-импульсная модуляция (ШИМ) – это широко используемый метод для общего управления мощностью постоянного тока на электрическое устройство, реализованный на практике с помощью современной электронной энергетики переключатели. Однако он также находит свое место в прерывателях переменного тока. Среднее значение тока, подаваемого на нагрузку, регулируется положением переключателя и продолжительностью его состояния. Если период включения переключателя больше по сравнению с периодом выключения, нагрузка получает сравнительно более высокую мощность. Таким образом, частота переключения ШИМ должна быть выше.
Однако он также находит свое место в прерывателях переменного тока. Среднее значение тока, подаваемого на нагрузку, регулируется положением переключателя и продолжительностью его состояния. Если период включения переключателя больше по сравнению с периодом выключения, нагрузка получает сравнительно более высокую мощность. Таким образом, частота переключения ШИМ должна быть выше.
Обычно переключение должно производиться несколько раз в минуту в электрической плите, 120 Гц в диммере лампы, от нескольких килогерц (кГц) до десятков кГц для моторного привода.Частота коммутации усилителей звука и компьютерных блоков питания составляет от десяти до сотен кГц. Отношение времени включения к периоду времени импульса известно как рабочий цикл. Если рабочий цикл низкий, это означает низкую мощность.
Потери мощности в коммутационном устройстве очень малы из-за почти ничтожного количества тока, протекающего в выключенном состоянии устройства, и незначительного падения напряжения в выключенном состоянии.![]() Цифровое управление также использует метод ШИМ. ШИМ также использовался в некоторых системах связи, где его рабочий цикл использовался для передачи информации по каналу связи.
Цифровое управление также использует метод ШИМ. ШИМ также использовался в некоторых системах связи, где его рабочий цикл использовался для передачи информации по каналу связи.
ШИМ может использоваться для регулировки общего количества мощности, подаваемой на нагрузку, без потерь, обычно возникающих, когда передача мощности ограничивается резистивными средствами. Недостатками являются пульсации, определяемые рабочим циклом, частотой переключения и свойствами нагрузки. При достаточно высокой частоте переключения и, при необходимости, использовании дополнительных пассивных электронных фильтров последовательность импульсов может быть сглажена и восстановлена средняя аналоговая форма волны. Системы управления с высокочастотной ШИМ могут быть легко реализованы с помощью полупроводниковых переключателей.
Как уже было сказано выше, переключатель почти не рассеивает мощность ни в состоянии, ни в выключенном состоянии. Однако во время переходов между включенным и выключенным состояниями как напряжение, так и ток не равны нулю, и, таким образом, значительная мощность рассеивается в переключателях. К счастью, изменение состояния между полностью включенным и полностью выключенным происходит довольно быстро (обычно менее 100 наносекунд) по сравнению с типичным временем включения или выключения, поэтому средняя рассеиваемая мощность довольно низка по сравнению с мощностью, подаваемой даже при высоких частотах переключения. используются.
К счастью, изменение состояния между полностью включенным и полностью выключенным происходит довольно быстро (обычно менее 100 наносекунд) по сравнению с типичным временем включения или выключения, поэтому средняя рассеиваемая мощность довольно низка по сравнению с мощностью, подаваемой даже при высоких частотах переключения. используются.
Использование ШИМ для подачи питания постоянного тока на нагрузку
Большая часть производственных процессов требует выполнения определенных параметров, касающихся скорости привода. Системы электропривода, используемые во многих промышленных приложениях, требуют более высокой производительности, надежности, регулируемой скорости из-за простоты управления. Контроль скорости двигателя постоянного тока важен в приложениях, где точность и защита имеют решающее значение. Назначение регулятора скорости двигателя – принимать сигнал, представляющий требуемую скорость, и приводить двигатель в движение с этой скоростью.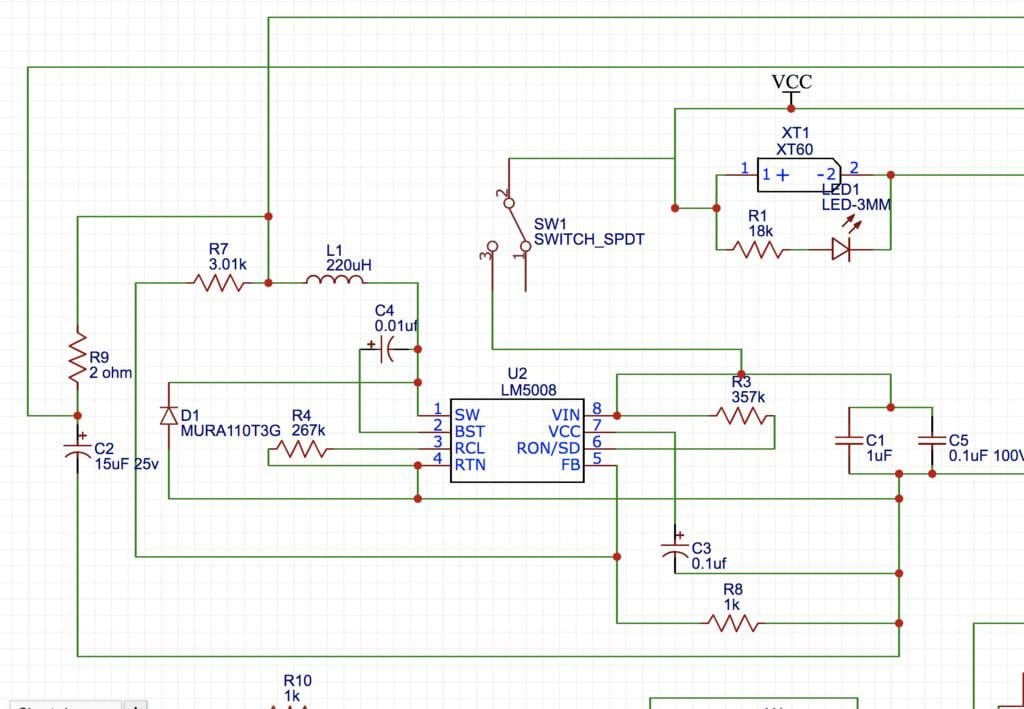
Широтно-импульсная модуляция (ШИМ) применительно к управлению двигателем – это способ передачи энергии посредством последовательности импульсов, а не непрерывно меняющегося (аналогового) сигнала. Увеличивая или уменьшая ширину импульса, контроллер регулирует поток энергии на вал двигателя. собственная индуктивность двигателя действует как фильтр, хранение энергии в течение цикла «ON», выпуская его со скоростью, соответствующей сигнал входного сигнала или эталонным. Другими словами, энергия поступает в нагрузку не столько переключения частоты, но на опорной частоте.
Схема используется для управления скоростью двигателя постоянного тока с помощью метода ШИМ. Серийный контроллер двигателя постоянного тока с регулируемой скоростью 12 В использует микросхему таймера 555 в качестве генератора импульсов ШИМ для регулирования скорости двигателя 12 В постоянного тока. IC 555 – это популярный чип таймера, используемый для создания схем таймера. Он был представлен в 1972 году компанией Signetics. Он называется 555, потому что внутри находятся три резистора по 5 кОм. ИС состоит из двух компараторов, цепи резисторов, триггера и выходного каскада. Он работает в трех основных режимах: нестабильный, моностабильный (в котором он действует как генератор однократных импульсов) и бистабильный режим.То есть, когда он срабатывает; выходной сигнал становится высоким в течение периода, зависящего от значений резистора синхронизации и конденсатора. В нестабильном режиме (AMV) ИС работает как автономный мультивибратор. Выходной сигнал постоянно меняется на высокий и низкий, давая пульсирующий выходной сигнал в качестве генератора. В бистабильном режиме, также известном как триггер Шмитта, ИС работает как триггер с высоким или низким выходом на каждом триггере и сбросе.
Он называется 555, потому что внутри находятся три резистора по 5 кОм. ИС состоит из двух компараторов, цепи резисторов, триггера и выходного каскада. Он работает в трех основных режимах: нестабильный, моностабильный (в котором он действует как генератор однократных импульсов) и бистабильный режим.То есть, когда он срабатывает; выходной сигнал становится высоким в течение периода, зависящего от значений резистора синхронизации и конденсатора. В нестабильном режиме (AMV) ИС работает как автономный мультивибратор. Выходной сигнал постоянно меняется на высокий и низкий, давая пульсирующий выходной сигнал в качестве генератора. В бистабильном режиме, также известном как триггер Шмитта, ИС работает как триггер с высоким или низким выходом на каждом триггере и сбросе.
В этой схеме используется МОП-транзистор IRF540. Это усовершенствованный N-канальный МОП-транзистор.Это усовершенствованный силовой полевой МОП-транзистор, разработанный, испытанный и гарантированно выдерживающий определенный уровень энергии в лавинном режиме пробоя. Эти силовые полевые МОП-транзисторы предназначены для таких приложений, как импульсные регуляторы, переключающие преобразователи, драйверы двигателей, драйверы реле и драйверы для мощных биполярных переключающих транзисторов, требующих высокой скорости и низкой мощности управления затвором. Эти типы могут управляться напрямую от интегральных схем. Рабочее напряжение этой цепи можно отрегулировать в соответствии с потребностями управляемого двигателя постоянного тока.Эта схема может работать от 5-18 В постоянного тока.
Эти силовые полевые МОП-транзисторы предназначены для таких приложений, как импульсные регуляторы, переключающие преобразователи, драйверы двигателей, драйверы реле и драйверы для мощных биполярных переключающих транзисторов, требующих высокой скорости и низкой мощности управления затвором. Эти типы могут управляться напрямую от интегральных схем. Рабочее напряжение этой цепи можно отрегулировать в соответствии с потребностями управляемого двигателя постоянного тока.Эта схема может работать от 5-18 В постоянного тока.
Вышеупомянутая схема, то есть управление скоростью двигателя постоянного тока с помощью метода ШИМ, изменяет рабочий цикл, который, в свою очередь, управляет скоростью двигателя. IC 555 подключен в нестабильном режиме к автономному мультивибратору. Схема состоит из потенциометра и двух диодов, которые используются для изменения рабочего цикла и поддержания постоянной частоты. Поскольку сопротивление переменного резистора или потенциометра изменяется, рабочий цикл импульсов, подаваемых на полевой МОП-транзистор, изменяется, и, соответственно, изменяется мощность постоянного тока на двигатель, и, таким образом, его скорость увеличивается с увеличением рабочего цикла.-750x750.jpg)
Использование ШИМ для подачи питания переменного тока на нагрузку
Современные полупроводниковые переключатели, такие как полевые МОП-транзисторы или биполярные транзисторы с изолированным затвором (IGBT), являются идеальными компонентами. Таким образом могут быть созданы контроллеры с высокой эффективностью. Обычно преобразователи частоты, используемые для управления двигателями переменного тока, имеют КПД выше 98%. Импульсные источники питания имеют более низкий КПД из-за низкого уровня выходного напряжения (часто требуется даже менее 2 В для микропроцессоров), но все же может быть достигнут КПД более 70-80%.
Этот вид управления переменным током является известным по мощности методом отложенного угла зажигания. Он дешевле и генерирует много электрических шумов и гармоник по сравнению с реальным ШИМ-управлением, которое создает незначительный шум.
Для многих приложений, таких как промышленное отопление, управление освещением, асинхронные двигатели с плавным пуском и регуляторы скорости для вентиляторов и насосов, требуется переменное напряжение переменного тока от постоянного источника переменного тока.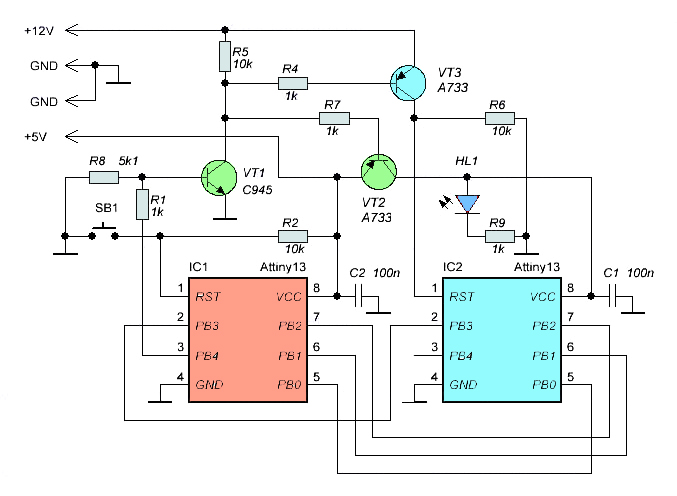 Для этих требований широко используется регулировка фазового угла регуляторов.Он предлагает некоторые преимущества, такие как простота и возможность экономичного управления большим количеством энергии. Однако запаздывающий угол зажигания вызывает прерывистость и обилие гармоник в токе нагрузки, а при увеличении угла зажигания на стороне переменного тока возникает запаздывающий коэффициент мощности.
Для этих требований широко используется регулировка фазового угла регуляторов.Он предлагает некоторые преимущества, такие как простота и возможность экономичного управления большим количеством энергии. Однако запаздывающий угол зажигания вызывает прерывистость и обилие гармоник в токе нагрузки, а при увеличении угла зажигания на стороне переменного тока возникает запаздывающий коэффициент мощности.
Эти проблемы можно решить, используя прерыватель переменного тока с ШИМ. Этот прерыватель переменного тока с ШИМ имеет несколько преимуществ, таких как синусоидальный входной ток с коэффициентом мощности, близким к единице. Однако, чтобы уменьшить размер фильтра и улучшить качество выходного регулятора, следует увеличить частоту переключения.Это вызывает большие потери при переключении. Другой проблемой является коммутация переключающего переключателя S1 с переключателем свободного хода S2. Это вызывает всплеск тока, если оба переключателя включены одновременно (короткое замыкание), и всплеск напряжения, если оба переключателя выключены (нет свободного пути).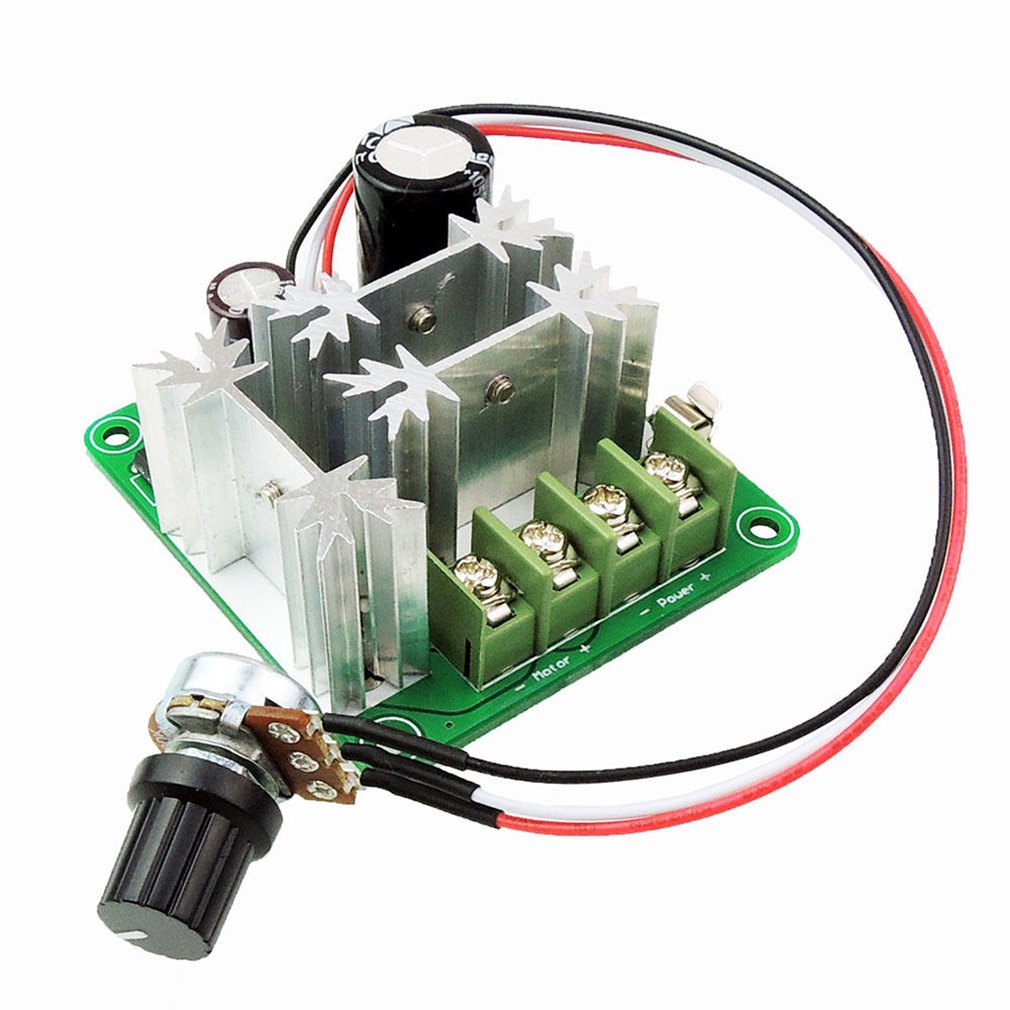 Чтобы избежать этих проблем, использовался демпфер RC. Однако это увеличивает потери мощности в цепи и является сложным, дорогим, громоздким и неэффективным для приложений с большой мощностью. Предлагается прерыватель переменного тока с переключением напряжения нулевого тока (ZCS-ZVS).Его регулятор выходного напряжения должен изменять время выключения, контролируемое ШИМ-сигналом. Таким образом, необходимо использовать регулирование частоты для достижения мягкого переключения, а в общих системах управления используются методы ШИМ, определяющие время включения. Этот метод имеет такие преимущества, как простое управление с сигма-дельта-модуляцией и постоянный входной ток. Ниже представлены особенности предлагаемой схемы и схемы с прерыванием ШИМ.
Чтобы избежать этих проблем, использовался демпфер RC. Однако это увеличивает потери мощности в цепи и является сложным, дорогим, громоздким и неэффективным для приложений с большой мощностью. Предлагается прерыватель переменного тока с переключением напряжения нулевого тока (ZCS-ZVS).Его регулятор выходного напряжения должен изменять время выключения, контролируемое ШИМ-сигналом. Таким образом, необходимо использовать регулирование частоты для достижения мягкого переключения, а в общих системах управления используются методы ШИМ, определяющие время включения. Этот метод имеет такие преимущества, как простое управление с сигма-дельта-модуляцией и постоянный входной ток. Ниже представлены особенности предлагаемой схемы и схемы с прерыванием ШИМ.
Руководство покупателя – нужен ли мне контроллер заряда солнечной энергии с ШИМ или MPPT?
Зачем нужен контроллер солнечного заряда
Посмотреть все контроллеры заряда от солнечных батарей: Щелкните здесь
Контроллер заряда солнечной батареи (часто называемый регулятором) похож на обычное зарядное устройство, т. е.е. он регулирует ток, протекающий от солнечной панели в батарею, чтобы избежать перезарядки батарей. (Если вам не нужно понимать причины, прокрутите до конца простую блок-схему) . Как и в обычном качественном зарядном устройстве, используются различные типы аккумуляторов, можно выбрать напряжение поглощения, напряжение холостого хода, а иногда также можно выбрать периоды времени и / или остаточный ток. Они особенно подходят для литий-железо-фосфатных батарей, поскольку после полной зарядки контроллер остается на установленном плавающем или удерживающем напряжении около 13.6 В (3,4 В на элемент) до конца дня.
е.е. он регулирует ток, протекающий от солнечной панели в батарею, чтобы избежать перезарядки батарей. (Если вам не нужно понимать причины, прокрутите до конца простую блок-схему) . Как и в обычном качественном зарядном устройстве, используются различные типы аккумуляторов, можно выбрать напряжение поглощения, напряжение холостого хода, а иногда также можно выбрать периоды времени и / или остаточный ток. Они особенно подходят для литий-железо-фосфатных батарей, поскольку после полной зарядки контроллер остается на установленном плавающем или удерживающем напряжении около 13.6 В (3,4 В на элемент) до конца дня.
Наиболее распространенный профиль заряда – это та же основная последовательность, что и на качественном сетевом зарядном устройстве, то есть объемный режим> режим поглощения> плавающий режим. Вход в режим оптовой заправки происходит по адресу:
- восход утром
- , если напряжение батареи падает ниже заданного значения в течение более заданного периода времени, например 5 секунд (повторный вход)
Этот повторный вход в режим большой емкости хорошо работает со свинцово-кислотными аккумуляторами, поскольку падение и падение напряжения хуже, чем для литиевых аккумуляторов, которые поддерживают более высокое и стабильное напряжение на протяжении большей части цикла разряда.
Литиевые батареи (LiFePO4) не получают выгоды от повторного входа в объемный режим в течение дня, так как внутреннее сопротивление литиевых батарей увеличивается при высоком (и низком) состоянии заряда, как показано оранжевыми вертикальными линиями в таблице ниже и необходимо только время от времени балансировать ячейки, что может быть сделано только вокруг напряжения поглощения. Связанная с этим причина состоит в том, чтобы избежать быстрых и больших колебаний напряжения, которые будут происходить в этих регионах при включении и выключении больших нагрузок.
Литиевые батареи не имеют определенного «напряжения холостого хода», и поэтому «напряжение холостого хода» контроллера должно быть установлено равным или чуть ниже «напряжения колена заряда» (как указано в таблице ниже) заряда LiFePO4. профиль, то есть 3,4 В на элемент или 13,6 В для аккумулятора 12 В. Контроллер должен удерживать это напряжение в течение оставшейся части дня после полной зарядки аккумулятора.![]()
Разница между контроллерами заряда солнечных батарей PWM и MPPT
Суть различия:
- С ШИМ-контроллером ток отводится от панели чуть выше напряжения батареи, тогда как
- С контроллером MPPT ток выводится из панели на панели «максимальное напряжение питания» (подумайте о контроллере MPPT как о «интеллектуальном преобразователе постоянного тока в постоянный»).
Вы часто видите лозунги, такие как «вы получите 20% или более энергии, получаемой от контроллера MPPT».Эта дополнительная плата на самом деле значительно варьируется, и ниже приводится сравнение, предполагая, что панель находится на полном солнце, а контроллер находится в режиме объемной зарядки. Игнорирование падений напряжения и использование простой панели и простой математики в качестве примера:
Максимальный ток питания панели (Имп.) = 5,0 А
Максимальное напряжение питания панели (Vmp) = 18 В
Напряжение аккумулятора = 13 В (напряжение аккумулятора может варьироваться от 10,8 В до 14,4 В в режиме абсорбционной зарядки).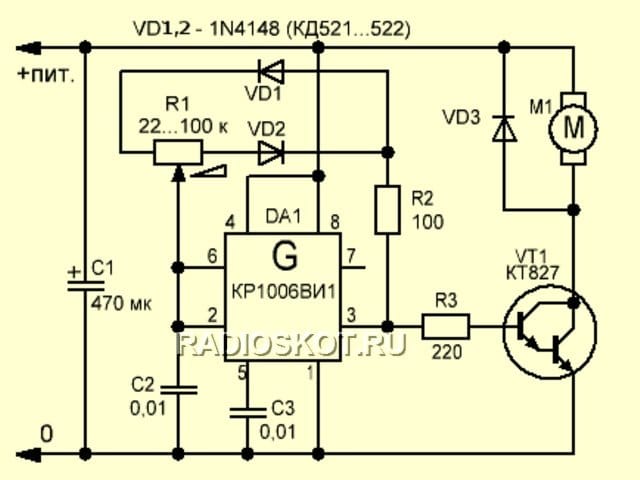 При 13 В усилитель панели будет немного выше, чем максимальный усилитель мощности, скажем, 5,2 А
При 13 В усилитель панели будет немного выше, чем максимальный усилитель мощности, скажем, 5,2 А
С контроллером PWM потребляемая мощность панели составляет 5,2 А * 13 В = 67,6 Вт. Это количество энергии будет потребляться независимо от температуры панели, при условии, что напряжение панели остается выше напряжения батареи.
С контроллером MPPT мощность панели составляет 5,0 А * 18 В = 90 Вт, т.е. на 25% больше. Однако это слишком оптимистично, поскольку напряжение падает с ростом температуры; Таким образом, если предположить, что температура панели повышается, скажем, на 30 ° C выше температуры стандартных условий испытаний (STC), равной 25 ° C, и напряжение падает на 4% на каждые 10 ° C, т.е.е. всего 12%, тогда мощность, потребляемая MPPT, будет 5 А * 15,84 В = 79,2 Вт, т.е. на 17,2% больше мощности, чем у ШИМ-контроллера.
Таким образом, наблюдается увеличение сбора энергии с помощью контроллеров MPPT, но процентное увеличение сбора значительно варьируется в течение дня.![]()
Различия в работе ШИМ и MPPT:
ШИМ:
Контроллер PWM (широтно-импульсной модуляции) можно рассматривать как (электронный) переключатель между солнечными панелями и батареей:
- Переключатель находится в положении ВКЛ, когда зарядка находится в режиме объемной зарядки
- Переключатель «щелкает» ВКЛ и ВЫКЛ по мере необходимости (широтно-импульсная модуляция), чтобы поддерживать напряжение батареи на уровне напряжения поглощения.
- Переключатель выключен в конце поглощения, а напряжение батареи падает до плавающего.
- Переключатель снова включается и выключается по мере необходимости (широтно-импульсная модуляция), чтобы удерживать напряжение батареи на уровне плавающего напряжения.
Обратите внимание, что когда переключатель находится в положении ВЫКЛ, напряжение панели будет равным напряжению холостого хода (Voc), а когда переключатель включен, напряжение панели будет равно напряжению батареи + напряжение между панелью и контроллером будет падать.

Лучшее соответствие панели для ШИМ-контроллера:
Лучше всего подходит панель для ШИМ-контроллера – это панель с напряжением, которое чуть выше, чем требуется для зарядки аккумулятора, и с учетом температуры, как правило, панель с Vmp (максимальное напряжение питания) около 18 В для зарядки Аккумулятор 12 В. Их часто называют панелями на 12 В, хотя их напряжение составляет около 18 В.
MPPT:
Контроллер MPPT можно рассматривать как «интеллектуальный преобразователь постоянного тока в постоянный», т.е.е. он снижает напряжение панели (следовательно, можно использовать «домашние панели») до напряжения, необходимого для зарядки аккумулятора. Ток увеличивается в той же пропорции, что и падение напряжения (без учета потерь на нагрев в электронике), как в обычном понижающем DC-DC преобразователе.
«Умный» элемент в преобразователе постоянного тока в постоянный – это мониторинг точки максимальной мощности панели, которая будет меняться в течение дня в зависимости от силы света и угла наклона, температуры панели, затенения и состояния панели (ей). Затем «умные устройства» регулируют входное напряжение преобразователя постоянного тока в постоянный – на «инженерном языке» он обеспечивает согласованную нагрузку на панель.
Затем «умные устройства» регулируют входное напряжение преобразователя постоянного тока в постоянный – на «инженерном языке» он обеспечивает согласованную нагрузку на панель.
Лучшая панель для контроллера MPPT:
Для согласования панели с контроллером MPPT рекомендуется проверить следующее:
- Напряжение холостого хода панели (Voc) должно быть ниже допустимого напряжения.
- Voc должен быть выше «пускового напряжения», чтобы контроллер «сработал».
- Максимальный ток короткого замыкания панели (Isc) должен находиться в пределах указанного диапазона
- Максимальная мощность массива – некоторые контроллеры допускают “завышение размера”, например.g Redarc Manager 30 может иметь до 520 Вт подключенного
Выбор подходящего солнечного контроллера / регулятора
ШИМ – хороший недорогой вариант:
• для небольших систем
• где эффективность системы не критична, например, капельная зарядка.
• для солнечных панелей с максимальным напряжением питания (Vmp) до 18 В для зарядки аккумулятора 12 В (36 В для аккумулятора 24 В и т. Д.).
Контроллер MPPT лучший:
• Для более крупных систем, в которых целесообразно использование дополнительных 20% * или более энергии
• Когда напряжение солнечной батареи существенно выше, чем напряжение батареи e.грамм. с помощью домашних панелей, для зарядки аккумуляторов 12В
* Контроллер MPPT даст более высокую отдачу по сравнению с контроллером PWM при увеличении напряжения панели. Т.е. панель eArche мощностью 160 Вт, использующая 36 обычных монокристаллических ячеек с максимальной мощностью 8,4 А, будет обеспечивать около 8,6 А при 12 В; в то время как панель 180 Вт, имеющая еще 4 ячейки, будет обеспечивать такую же силу тока, но 4 дополнительных ячейки увеличивают напряжение панели на 2 В. Контроллер PWM не будет собирать дополнительную энергию, но контроллер MPPT будет собирать дополнительные 11. 1% (4/36) от панели 180 Вт.
1% (4/36) от панели 180 Вт.
По тому же принципу для всех панелей, использующих элементы SunPower с более чем 32 ячейками, требуется контроллер заряда MPPT, в противном случае контроллер PWM будет собирать ту же энергию с панелей с 36, 40, 44 ячейками, что и с панели с 32 ячейками.
НАЖМИТЕ ЗДЕСЬ, чтобы увидеть продукты
Характеристики и опции солнечного контроллера заряда
Smart Bluetooth
КонтроллерыVictron SmartSolar имеют встроенный Bluetooth для удаленного мониторинга MPPT путем сопряжения его со смартфоном или другим устройством через приложение Victron.
НАЖМИТЕ ЗДЕСЬ, чтобы увидеть продукты
Контроллеры Boost MPPT
Контроллеры зарядаGenasun «Boost» MPPT позволяют заряжать аккумуляторы, которые имеют более высокое напряжение, чем панель.
НАЖМИТЕ ЗДЕСЬ, чтобы увидеть продукты
Комбинированное зарядное устройство MPPT и DC-DC
Функция MPPT является естественным дополнением к функции зарядного устройства DC-DC, и есть несколько качественных брендов, которые предоставляют ее в стадии разработки.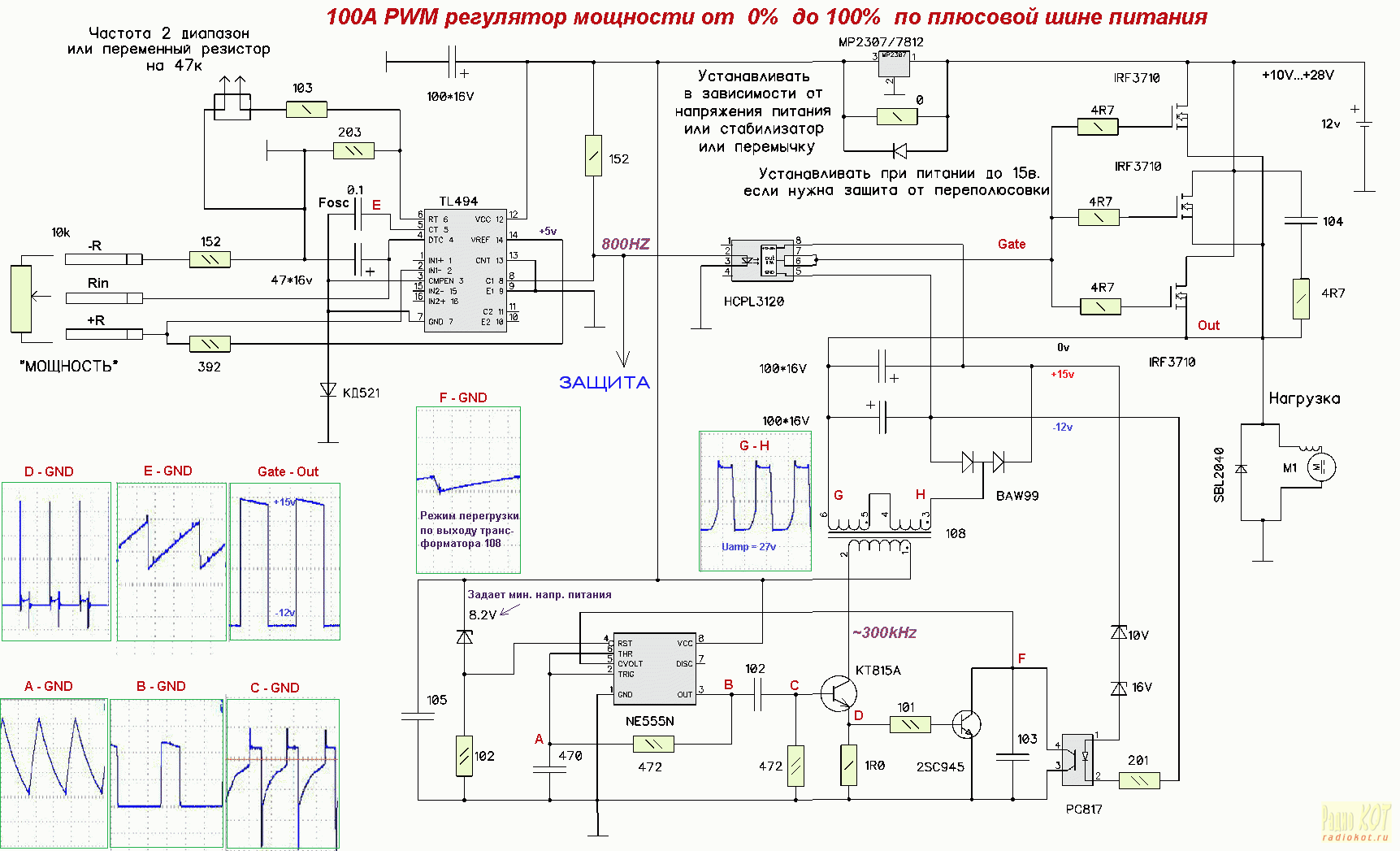
Отдельный блок можно использовать отдельно, поскольку он автоматически переключается между зарядкой генератора и зарядкой от солнечной энергии. Для более крупных систем мы предпочитаем использовать отдельный контроллер MPPT для фиксированных панелей на крыше и использовать комбинированный MPPT / DC-DC с переносными панелями. В этом случае соединитель Андерсона размещается снаружи дома на колесах, который затем подключается к солнечному входу блока MPPT / DC-DC.
Обратите внимание, что емкость аккумулятора должна быть достаточной, чтобы суммарный зарядный ток от одновременной зарядки от генератора переменного тока и солнечных панелей на крыше не превышал максимальный зарядный ток, рекомендованный производителями.
НАЖМИТЕ ЗДЕСЬ, чтобы увидеть продукты
Варианты дешевле
Дешевые контроллеры могут быть помечены как MPPT, но тестирование показало, что некоторые из них на самом деле являются контроллерами PWM.
Дешевые контроллеры могут не иметь защиты аккумулятора от перенапряжения, что может привести к перезарядке аккумулятора и потенциальному повреждению аккумулятора, поэтому покупатель остерегается.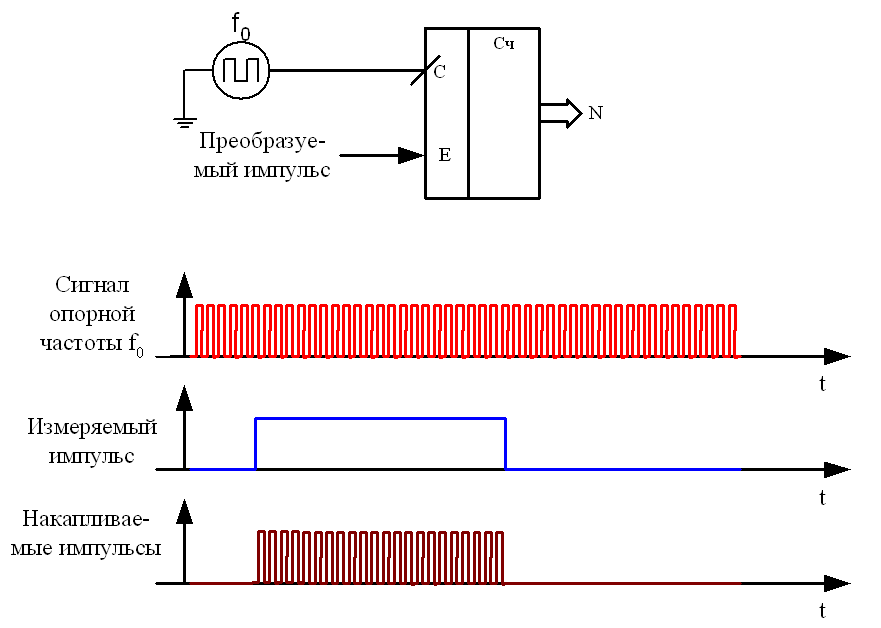
Несколько солнечных зарядных устройств
При правильном подключении можно добавить несколько солнечных зарядных устройств (любая комбинация типа и мощности) для зарядки аккумулятора.Правильная разводка означает, что каждое солнечное зарядное устройство в идеале подключается отдельно и непосредственно к клеммам аккумулятора. Этот идеальный случай означает, что каждый контроллер «видит» напряжение батареи и на него не влияет ток, исходящий от других контроллеров заряда. Контроллеры, очевидно, будут иметь разные характеристики зарядки и могут иметь разные настройки; и они будут заряжать в соответствии со своими запрограммированными характеристиками. Эта ситуация ничем не отличается от зарядки аккумулятора от сети / генератора одновременно с зарядкой от солнечной батареи.В современных контроллерах ток не будет течь обратно от батареи к контроллеру (за исключением очень небольшого тока покоя).
Простая блок-схема
Мне нужен контроллер солнечного заряда
Vmp солнечной панели больше:
– 19 В для батареи 12 В
– 34 В для батареи 24 В
– 49 В для батареи 36 В
– 64 В для батареи 48 В
Vmp солнечной панели находится в пределах:
– 17-19 В для батареи 12 В
– 30-34 В для батареи 24 В
– 43-49 В для батареи 36 В
– 56-64 В для батареи 48 В
Vmp солнечной панели меньше:
– 13 В для батареи 12 В
– 26 В для батареи 24 В
– 41 В для батареи 36 В
– 43 В для батареи 48 В
Щелкните ссылки для получения дополнительной информации о том, как выбирать между брендами.
(PDF) Динамический стабилизатор напряжения на основе преобразователя переменного тока с ШИМ-прерыванием: Топология и управление
, разработанные для повышения производительности преобразователя
. Когда происходят провалы и выбросы входного напряжения,
напряжение компенсации можно регулировать с помощью
, изменяя скважность сигналов ШИМ, чтобы поддерживать стабильное напряжение нагрузки
. Предлагаемый преобразователь и стратегия управления
демонстрируют преимущества быстрого динамического отклика
и эффективной компенсации колебаний напряжения
.Выполняется моделирование
для изучения характеристик предлагаемого преобразователя
. Прототип разработан с использованием DSP
для реализации алгоритмов управления. Моделирование
и результаты экспериментов показывают, что он имеет быструю переходную характеристику
и может эффективно поддерживать стабильное напряжение нагрузки
.![]()
Ссылки:
[1] Д. Сабин, Оценка качества электроэнергии распределительной системы
, Элект.Мощность Res. Inst., Palo
Alto, CA, EPRI Final Rep. TR-106294-V2, vol.
2, Сводный статистический отчет, май 1996 г.
[2] М. Х. Дж. Боллен, Понимание качества электроэнергии
Проблемы: провалы и прерывания напряжения, сер.
Серияпо энергетике. Нью-Йорк: IEEE
press, 2000.
[3] До-Хюн, Дж. И К. Гю-Ха, Повышающий / понижающий регулятор напряжения переменного тока
, использующий трансформатор с переключателем ответвлений
и прерывателем переменного тока с ШИМ, IEEE
Транзакции по промышленной электронике, Vol.45,
№ 6, стр. 905-911,1998
[4] Chung, YH, GH Kwon и др., Регулятор напряжения Dynamic
с твердотельным переключаемым ответвлением
Устройство смены качества и безопасности электроэнергии
Delivery Systems, Международный симпозиум CIGRE / IEEE PES –
, 2003
[5] Нильсен, Дж.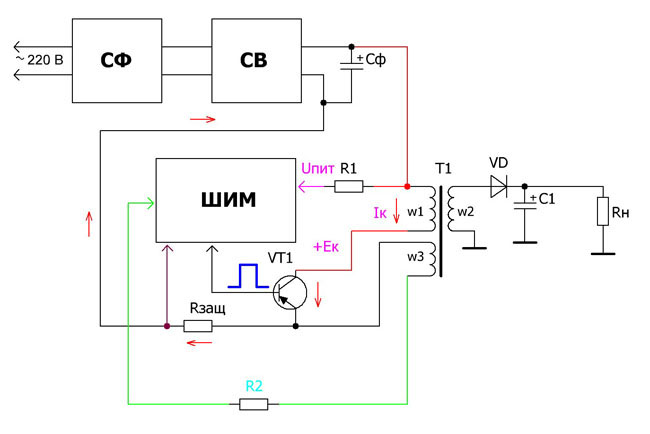 Г., М. Ньюман и др., Control и
Г., М. Ньюман и др., Control и
Испытания устройства динамического восстановления напряжения (DVR) на
средний уровень напряжения, IEEE Transactions on
Power Electronics, Vol.19, No. 3, pp.806-
813,2004
[6] Вилатгамува, DM, AADR Perera, et al.,
Компенсация провала напряжения с помощью энергии
Оптимизированный динамический восстановитель напряжения, IEEE
Транзакции на Power Delivery, Vol.18, No. 3,
pp.928-936, 2003
[7] BH Kwon, Gang Youl Jeong, Novel Line
Conditioner With Voltage Up / Down,
IEEE Transactions on Industrial Electronics,
Vol.49, No.5, pp. 1110-1119, 2002
[8] S.M. Хиетпас, М. Наден, Автоматический регулятор напряжения
с использованием преобразователя напряжения-переменного тока
, Приложение IEEE Transaction on Industry
, Том 36, № 1, стр. 33-38, 2000
[9] Веспреми К., Хуньяр М., Новое приложение
полей ШИМ-прерывателя переменного тока IGBT, Восьмая
Международная конференция силовой электроники
и приводов с регулируемой скоростью, стр. 46-51, 2000
46-51, 2000
[10] Бодур Х., Бакан А.Ф., Сарул М.Х., Универсальный
Управление скоростью двигателяс управлением по току
ШИМ-прерыватель переменного тока с использованием микроконтроллера,
Труды Международной конференции IEEE
по промышленной технологии, Том 2, стр.
2000
[11] Сундаресваран К., Раджасекар Н., Сридеви В.Т.,
Сравнение производительности конденсаторных асинхронных двигателей
, питаемых от регулятора напряжения переменного тока
и прерывателя переменного тока SPWM, IEEE
Транзакции по промышленной электронике, Vol.53,
pp.990-993, 2006
[12] Шиничиро Фудзикура, Акитеру Уэда и Акихиро
Torii, Анализ трехфазного понижающего повышения
Прерыватель переменного тока с двухфазным управлением, мощность
ПреобразованиеConference, pp. 824-830, 2007
[13] Джеральдо CR Sincero и Arnaldo José Perin,
Натриевая лампа высокого давления High Power
Факторные электронные балластыс использованием преобразователей AC – AC
, транзакции IEEE On Power
Электроника , Vol. 22, No. 3: 804-814,2007
22, No. 3: 804-814,2007
[14] Jin, Nan, Tang Houjun, et al. Анализ и контроль
регулятора напряжения типа Buck-Boost Chopper AC
. 6-я Международная конференция IEEE
Power Electronics and Motion Control
Conference, pp.1019-1023, 2009.
[15] Набил А. Ахмед, Кенджи Амей и Масааки
Сакуи, Новая конфигурация однофазного двигателя
Напряжение прерывателя переменного тока с симметричной ШИМ
Контроллер, транзакции IEEE в промышленных условиях
Electronics, Vol.46, No. 5, pp. 942-952, 1999
[16] Н.А. Ахмед, Кенджи Амей и Масааки Сакуи,
Улучшенная схема прерывателей переменного тока для однофазной системы
, Протоколы конференции IEEE
PCCON , vol.2, pp. 907-912, 1997
[17] Такаюки Синяма, Макото Кавай, Акихиро
Тории, Акитеру Уэда, Характеристики цепи прерывателя AC
с LC-фильтрами на входе
и на выходе , Электротехника в
Япония, Vol.155, No.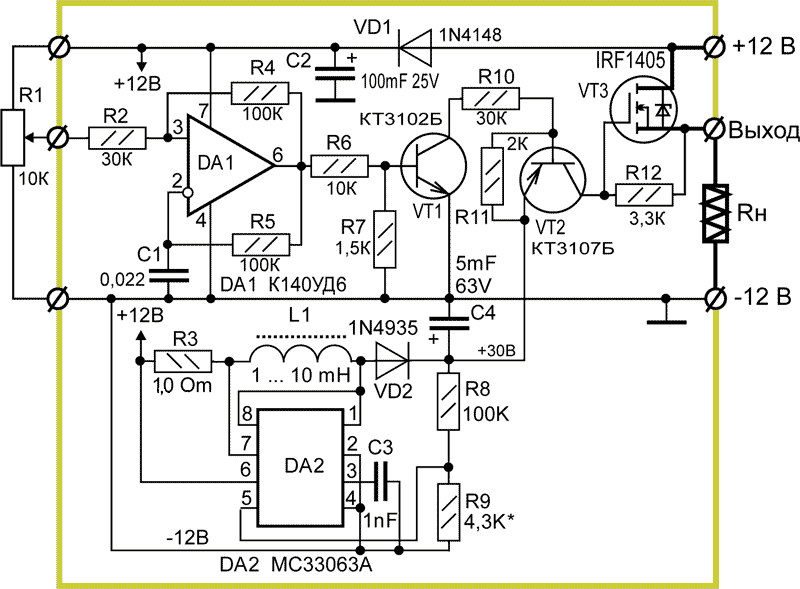 2, pp.45-52, 2006
2, pp.45-52, 2006
[18] B.H. Квон, Дж. Х. Юм, Дж. Х. Чой, Автоматический регулятор напряжения
с высокой динамической скоростью, IEE
Proceedings of Electrical Power Application,
Vol.146, No. 2, pp.201-207, 1999
[19] J.H. Ким, Б. Мин и Б. Kwon, A PWM
понижающе-повышающий прерыватель переменного тока, решающий проблему коммутации
, транзакции IEEE на
Industrial Electronics, Vol. 45, No. 5, pp. 832-
835, 1998
[20] Shinyama T., Ueda A, and Torii A, прерыватель переменного тока
с использованием четырех переключателей, Proceedings of Power
Conversion Conference, стр.1056-1060, 2002
ОПЕРАЦИИ WSEAS в СИСТЕМАХ
Цзинь Нан, Тан Хоу-Цзюнь, Лань Цзянь-Ю,
Яо Чен, Чен Вэй-Вэй, Ан Сяо-Ю
Выпуск 5, Том 9, май 2010 г.
Широтно-импульсная модуляция (ШИМ) | Видео о круговых навыках Collin Cunningham
ШИМ-контроллер: устройства управления с помощью цифрового сигнала
Автор Коллин Каннингем Широтно-импульсная модуляция (ШИМ) – очень умный способ использования электричества для управления аналоговыми устройствами с помощью цифрового сигнала. Это очень простой метод, который очень эффективен при управлении двигателями, лампами, светодиодами и многим другим!
Это очень простой метод, который очень эффективен при управлении двигателями, лампами, светодиодами и многим другим!
Прекрасным примером использования ШИМ является то, что вы когда-либо приглушали светодиод с помощью Arduino:
Затухание – Демонстрирует использование функции analogWrite () для затухания светодиода. AnalogWrite использует широтно-импульсную модуляцию (PWM), очень быстро включающую и выключающую цифровой вывод для создания эффекта затухания.
Однако вам не нужен микроконтроллер для генерации сигнала ШИМ.Микросхему таймера 555 можно настроить так, чтобы ее выходной рабочий цикл зависел от потенциометра – с помощью некоторых простых схем.
Создайте свой собственный комплект широтно-импульсного модулятора Навыки схем: видео с широтно-импульсной модуляцией
Для более надежного решения вы можете рассмотреть комплект модулятора ширины импульса постоянного тока, подходящий для передачи тока до 6,5 А и построенный на базе Motorola SG3525 – микросхемы посвященный искусству ШИМ.
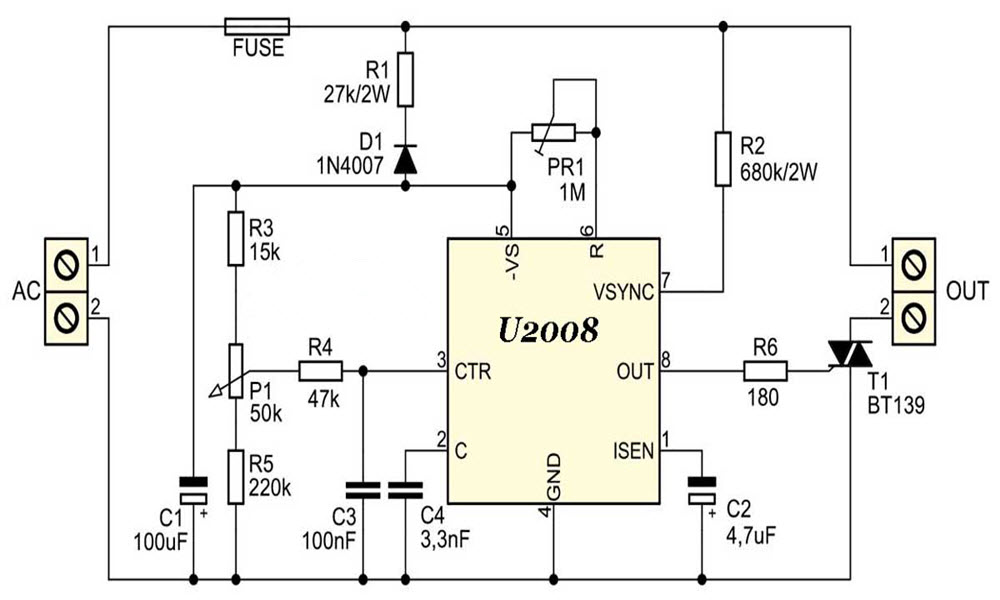
Конечно, Коллин отрицал бы свою природу, если бы не упомянул хотя бы одно приложение, связанное со звуком. ШИМ пригодится для генерации простых звуков и мелодий с микроконтроллера.
Arduino Simple Sounds
Wavetable Melody Generator
Щелкните здесь для просмотра технических данных Velleman K8004.
Видео «Сделай сам» по другим схемам от Коллина:
Травление печатной платы Функциональный генератори корпуса
Инфракрасный световой барьер
Цветной светодиодный орган
Прототипирование перфорированной платы
Блок питания
Устройства для поверхностного монтажа
Волоконно-оптический кабель
Комплект светодиодной матрицы
Если вы решите создать модульный комплект от постоянного тока до ширины импульса, мы хотели бы услышать о ваших результатах! Отправьте свою историю на [адрес электронной почты]
Введение в широтно-импульсную модуляцию
Рассмотрим мощный метод управления аналоговыми цепями с помощью цифровых выходов микропроцессора.
Широтно-импульсная модуляция (ШИМ) – это мощный метод управления аналоговыми цепями с помощью цифровых выходов микропроцессора. ШИМ используется в самых разных приложениях, от измерения и связи до управления мощностью и преобразования.
Аналоговые схемы
Аналоговый сигнал имеет постоянно меняющееся значение с бесконечным разрешением как по времени, так и по величине. Батарея на девять вольт является примером аналогового устройства, поскольку ее выходное напряжение не равно 9 В, изменяется со временем и может принимать любое числовое значение.Точно так же величина потребляемого от батареи тока не ограничивается конечным набором возможных значений. Аналоговые сигналы отличаются от цифровых сигналов, поскольку последние всегда принимают значения только из конечного набора заранее определенных возможностей, таких как набор {0V, 5V}.
Аналоговые напряжения и токи могут использоваться для непосредственного управления вещами, например, громкостью автомобильного радио. В простом аналоговом радиоприемнике ручка соединена с переменным резистором. Когда вы поворачиваете ручку, сопротивление увеличивается или уменьшается.При этом ток, протекающий через резистор, увеличивается или уменьшается. Это изменяет количество тока, подаваемого на динамики, тем самым увеличивая или уменьшая громкость. Аналоговая схема – это такая же схема, как радио, выход которой линейно пропорционален входу.
В простом аналоговом радиоприемнике ручка соединена с переменным резистором. Когда вы поворачиваете ручку, сопротивление увеличивается или уменьшается.При этом ток, протекающий через резистор, увеличивается или уменьшается. Это изменяет количество тока, подаваемого на динамики, тем самым увеличивая или уменьшая громкость. Аналоговая схема – это такая же схема, как радио, выход которой линейно пропорционален входу.
Каким бы интуитивным и простым ни казалось аналоговое управление, оно не всегда экономически привлекательно или практично. Во-первых, аналоговые схемы имеют тенденцию дрейфовать со временем, и поэтому их очень сложно настроить.Прецизионные аналоговые схемы, которые решают эту проблему, могут быть очень большими, тяжелыми (подумайте о старом домашнем стереооборудовании) и дорогими. Аналоговые схемы также могут сильно нагреваться; рассеиваемая мощность пропорциональна напряжению на активных элементах, умноженному на ток через них. Аналоговая схема также может быть чувствительной к шуму. Из-за бесконечного разрешения любое возмущение или шум аналогового сигнала обязательно изменяет текущее значение.
Из-за бесконечного разрешения любое возмущение или шум аналогового сигнала обязательно изменяет текущее значение.
Цифровое управление
Цифровое управление аналоговыми цепями позволяет значительно снизить стоимость системы и потребление энергии.Более того, многие микроконтроллеры и DSP уже включают в себя контроллеры PWM на кристалле, что упрощает реализацию.
Вкратце, ШИМ – это способ цифрового кодирования уровней аналогового сигнала. За счет использования счетчиков высокого разрешения рабочий цикл прямоугольной волны модулируется для кодирования определенного уровня аналогового сигнала. Сигнал PWM по-прежнему является цифровым, потому что в любой момент времени полное питание постоянного тока либо полностью включено, либо полностью отключено. Источник напряжения или тока подается на аналоговую нагрузку посредством повторяющейся серии импульсов включения и выключения.Время включения – это время, в течение которого питание постоянного тока подается на нагрузку, а время выключения – это период, в течение которого это питание отключено. При наличии достаточной полосы пропускания любое аналоговое значение может быть закодировано с помощью ШИМ.
При наличии достаточной полосы пропускания любое аналоговое значение может быть закодировано с помощью ШИМ.
На рисунке 1 показаны три различных сигнала ШИМ. На рисунке 1а показан выход ШИМ при рабочем цикле 10%. То есть сигнал включен 10% периода, а остальные 90% выключен. На рисунках 1b и 1c показаны выходы ШИМ при рабочем цикле 50% и 90% соответственно. Эти три выхода ШИМ кодируют три различных значения аналогового сигнала: 10%, 50% и 90% от полной мощности.Если, например, напряжение питания 9 В, а рабочий цикл 10%, будет получен аналоговый сигнал 0,9 В.
Рисунок 1: ШИМ-сигналы с различной скважностью
На рисунке 2 показана простая схема, которая может управляться с помощью ШИМ. На рисунке батарея 9 В питает лампочку накаливания. Если бы мы замкнули переключатель, соединяющий батарею и лампу, на 50 мс, лампочка в течение этого интервала будет получать 9 В. Если мы затем разомкнем выключатель на следующие 50 мс, лампа получит 0 В.Если мы будем повторять этот цикл 10 раз в секунду, лампочка будет гореть, как если бы она была подключена к батарее 4,5 В (50% от 9 В). Мы говорим, что рабочий цикл составляет 50%, а частота модуляции составляет 10 Гц.
Мы говорим, что рабочий цикл составляет 50%, а частота модуляции составляет 10 Гц.
Рисунок 2: Простая схема
Для большинства нагрузок, как индуктивных, так и емкостных, требуется гораздо более высокая частота модуляции, чем 10 Гц. Представьте, что наша лампа была включена на пять секунд, затем выключена на пять секунд, а затем снова включена. Рабочий цикл по-прежнему будет составлять 50%, но лампа будет ярко гореть в течение первых пяти секунд и выключаться в следующие.Для того чтобы лампочка могла видеть напряжение 4,5 В, период цикла должен быть коротким по сравнению со временем реакции нагрузки на изменение состояния переключателя. Чтобы добиться желаемого эффекта диммерной (но всегда горящей) лампы, необходимо увеличить частоту модуляции. То же самое и в других приложениях ШИМ. Общий диапазон частот модуляции от 1 кГц до 200 кГц.
Аппаратные контроллеры
Многие микроконтроллеры включают в себя контроллеры ШИМ. Например, Microchip PIC16C67 включает в себя два, каждый из которых имеет выбираемое время и период. Рабочий цикл – это отношение продолжительности включения к периоду; частота модуляции обратна периоду. Чтобы запустить ШИМ, в техническом паспорте указано, что программное обеспечение должно:
Рабочий цикл – это отношение продолжительности включения к периоду; частота модуляции обратна периоду. Чтобы запустить ШИМ, в техническом паспорте указано, что программное обеспечение должно:
- Установите период на встроенном таймере / счетчике, который обеспечивает модулирующую прямоугольную волну.
- Установите время включения в регистре управления ШИМ.
- Установите направление вывода ШИМ, который является одним из выводов ввода / вывода общего назначения.
- Запустить таймер.
- Включите ШИМ-контроллер.
Хотя конкретные контроллеры PWM действительно различаются по программным деталям, основная идея в целом одна и та же.
Связь и управление
Одним из преимуществ ШИМ является то, что сигнал остается цифровым на всем пути от процессора до управляемой системы; Цифро-аналоговое преобразование не требуется. Сохраняя цифровой сигнал, шумовые эффекты сводятся к минимуму. Шум может повлиять на цифровой сигнал только в том случае, если он достаточно силен, чтобы изменить логическую 1 на логический 0 или наоборот.
Повышенная помехозащищенность – еще одно преимущество выбора ШИМ над аналоговым управлением и основная причина, по которой ШИМ иногда используется для связи. Переход с аналогового сигнала на ШИМ может значительно увеличить длину канала связи. На приемном конце подходящая RC-цепь (резистор-конденсатор) или LC (индуктор-конденсатор) может удалить модулирующий прямоугольный сигнал высокой частоты и вернуть сигнал в аналоговую форму.
PWM находит применение в самых разных системах.В качестве конкретного примера рассмотрим тормоз с ШИМ-управлением. Проще говоря, тормоз – это устройство, которое сильно что-то зажимает. Во многих тормозах величина зажимного давления (или тормозного усилия) регулируется аналоговым входным сигналом. Чем больше напряжения или тока подается на тормоз, тем большее давление будет оказывать тормоз.
Выход контроллера ШИМ может быть подключен к переключателю между питанием и тормозом. Чтобы обеспечить большую тормозную способность, программному обеспечению нужно только увеличить рабочий цикл выхода ШИМ. Если требуется определенная величина тормозного давления, необходимо провести измерения для определения математической зависимости между рабочим циклом и давлением. (И полученные формулы или справочные таблицы будут изменены с учетом рабочей температуры, поверхностного износа и т. Д.)
Если требуется определенная величина тормозного давления, необходимо провести измерения для определения математической зависимости между рабочим циклом и давлением. (И полученные формулы или справочные таблицы будут изменены с учетом рабочей температуры, поверхностного износа и т. Д.)
Чтобы установить давление на тормоз, скажем, 100 фунтов на квадратный дюйм, программное обеспечение будет выполнять обратный поиск, чтобы определить рабочий цикл, который должен создавать такое количество силы. Затем он установит рабочий цикл ШИМ на новое значение, и тормоз отреагирует соответствующим образом.Если в системе имеется датчик, рабочий цикл можно регулировать с помощью управления с обратной связью, пока не будет точно достигнуто желаемое давление.
PWM экономичен, компактен и невосприимчив к шуму. И теперь это в твоей сумке уловок. Так что используйте это.
Майкл Барр – главный редактор ESP. Он также является автором книги «Программирование встроенных систем на C и C ++ » (O’Reilly, 1999) и членом дополнительного преподавателя Университета Мэриленда.
Пишите ему по адресу.
Вернуться к сентябрю 2001 г. Содержание
Продолжить чтение
Основы, работа, конструкция и эксплуатация
Много раз в мире электроники мы обнаруживали необходимость снизить одно постоянное напряжение до более низкого. Например, нам может потребоваться питание микроконтроллера 3,3 В от шины питания 12 В. Решение простое, мы просто добавляем 3.ИС линейного стабилизатора 3 В, такая как LD1117 с шиной 12 В и регулирует напряжение до 3,3 В. Мы уже узнали о работе регуляторов напряжения в нашей предыдущей статье.
Теперь предположим, что нам нужно запитать светодиодную ленту от той же шины 3,3 В. Светодиоды легко потребляют около 20 мА каждый, поэтому длинная полоса легко съела бы ампер или около того. Если посчитать мощность, рассеиваемую регулятором:
P = (V на выходе – V на выходе ) * I на выходе
Рассеиваемая мощность составляет около 8. 7 Вт! Теперь это ОЧЕНЬ много мощности для рассеивания небольшого линейного регулятора. Если мы посчитаем КПД, который представляет собой просто выходную мощность, деленную на входную, получатся жалкие 38% !. Обычно линейные регуляторы напряжения имеют очень низкий КПД по сравнению с импульсными регуляторами.
7 Вт! Теперь это ОЧЕНЬ много мощности для рассеивания небольшого линейного регулятора. Если мы посчитаем КПД, который представляет собой просто выходную мощность, деленную на входную, получатся жалкие 38% !. Обычно линейные регуляторы напряжения имеют очень низкий КПД по сравнению с импульсными регуляторами.
Теперь мы чувствуем острую необходимость найти что-то, что могло бы снизить напряжение постоянного тока и сделать это эффективно!
Понижающие преобразователи: знакомство
К счастью, такое устройство уже существует, и оно называется понижающим преобразователем или понижающим преобразователем .Это тип преобразователя постоянного тока , поэтому он выполняет эту задачу с помощью нескольких транзисторных ключей и катушки индуктивности. Типичная схема понижающего преобразователя показана на изображении выше.
Он очень похож на повышающий преобразователь, но расположение катушки индуктивности и транзистора меняется. Переключатель, показанный в приведенной выше схеме, обычно представляет собой переключатель силовой электроники, такой как MOSFET, IGBT или BJT. Переключатель будет переключаться (включаться и выключаться) с помощью сигнала ШИМ.
Переключатель, показанный в приведенной выше схеме, обычно представляет собой переключатель силовой электроники, такой как MOSFET, IGBT или BJT. Переключатель будет переключаться (включаться и выключаться) с помощью сигнала ШИМ.
Работа понижающего преобразователя немного похожа на «диммирование» ШИМ.Все мы слышали о том, что свет приглушается сигналом ШИМ. Небольшой рабочий цикл означает, что среднее напряжение, воспринимаемое нагрузкой, мало, а когда рабочий цикл высокий, среднее напряжение тоже высокое.
Но среднее напряжение – это не то, что нам нужно – необработанный сигнал PWN колеблется между высоким уровнем напряжения и землей, чего не хотелось бы никакой чувствительной нагрузке (например, микроконтроллеру). Конечно, подключение RC-фильтра к источнику прямоугольной волны делает выход чистым. Уровень напряжения фильтра зависит от скважности сигнала ШИМ – чем выше скважность, тем выше выходное напряжение.
Итак, теперь у нас есть чистое выходное напряжение.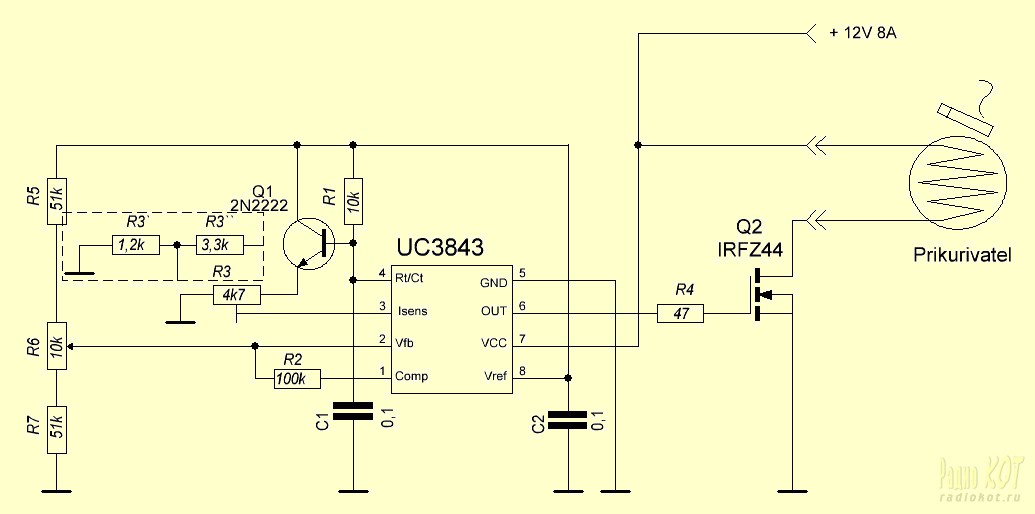 На приведенном ниже графике необработанный сигнал ШИМ показан синим цветом, а отфильтрованные выходные сигналы – красным и фиолетовым.
На приведенном ниже графике необработанный сигнал ШИМ показан синим цветом, а отфильтрованные выходные сигналы – красным и фиолетовым.
Теперь мы могли бы просто использовать его как понижающий преобразователь, но есть один серьезный недостаток – резистор в RC-фильтре ограничивает ток и расходует энергию в виде тепла, что не лучше, чем в примере линейного регулятора напряжения.
Чтобы решить эту проблему, мы обращаемся к другому типу фильтра напряжения, LC-фильтру, который выполняет ту же работу, что и RC-фильтр, но заменяет R на L, другими словами, резистор на катушку индуктивности.Катушка индуктивности сопротивляется изменениям тока, а конденсатор сопротивляется изменениям напряжения, что приводит к плавному постоянному току на выходе.
И теперь у нас есть преобразователь, способный понижать постоянное напряжение и делать это эффективно!
Работа понижающего преобразователя
Принцип работы понижающего преобразователя можно разбить на несколько этапов.
ШАГ – 1:
Переключатель включается и пропускает ток к выходному конденсатору, заряжая его.Поскольку напряжение на конденсаторе не может возрасти мгновенно, а индуктор ограничивает зарядный ток, напряжение на конденсаторе во время цикла переключения не является полным напряжением источника питания.
ШАГ – 2:
Теперь выключатель выключается. Поскольку ток в катушке индуктивности не может внезапно измениться, индуктор создает на ней напряжение. Это напряжение позволяет заряжать конденсатор и питать нагрузку через диод, когда переключатель выключен, поддерживая текущий выходной ток в течение всего цикла переключения.
Эти два шага повторяются много тысяч раз в секунду, что приводит к непрерывному выходу.
Разработка понижающего преобразователя
ШАГ – 1
Определите входное напряжение, а также выходное напряжение и ток.
Рабочий цикл преобразователя определяется выражением:
DC = V out / V in
ШАГ – 2
Определите выходную мощность, то есть произведение выходного напряжения и тока.![]() Это также входная мощность по закону сохранения энергии (хотя и не совсем так – ничто не является стопроцентно эффективным!).
Это также входная мощность по закону сохранения энергии (хотя и не совсем так – ничто не является стопроцентно эффективным!).
ШАГ – 3
Теперь разделите выходную мощность на выбранную частоту переключения, чтобы получить мощность, передаваемую за импульс.
Поскольку легче говорить об индукторах с точки зрения энергии, теперь мы можем предположить, что выходная мощность – это просто выходная энергия в секунду. Итак, если выходная мощность нашего преобразователя составляет 30 Вт, то мы можем сказать, что выходная энергия составляет тридцать Джоулей в секунду.
ШАГ – 4
Теперь, когда у нас есть энергия на импульс, мы можем рассчитать индуктивность, используя входной ток и энергию:
L = 2E / I 2
Где E – энергия, передаваемая за импульс, а I – квадрат входного тока.
Используя значения индуктивности, частоты и рабочего цикла, мы можем теперь приступить к созданию простого повышающего преобразователя.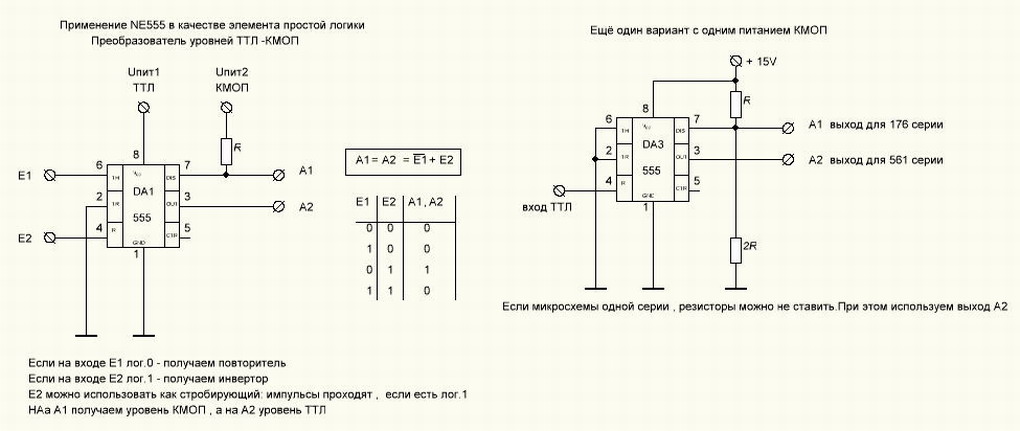
Выбор деталей
МОП-транзистор
Поскольку переключатель находится на высокой стороне, использование N-канального MOSFET или биполярного NPN-транзистора не будет работать, если у нас нет загрузочного драйвера затвора.Хотя это возможно, это довольно сложно.
В этих обстоятельствах рекомендуется использовать устройство с каналом P, они значительно упрощают требования к управлению, но помните, что они включаются, когда затвор низкий, поэтому может потребоваться инвертированный сигнал. Можно использовать IRF5210, он имеет приличное сопротивление 60 мОм и V DS -100 В, что должно быть достаточно для большинства приложений. Однако существует множество устройств получше, выбор полностью зависит от дизайнера в зависимости от конкретного приложения.
Не забудьте использовать драйвер затвора для уменьшения коммутационных потерь!
ДИОД
Поскольку этот диод не должен выдерживать очень высокие напряжения, довольно высокие токи, было бы хорошим выбором конструкции использовать диод Шоттки с низким прямым падением напряжения для обеспечения эффективности.