
FAQ • Что такое драйвер шагового двигателя?
Драйвер шагового двигателя – электронное устройство, которое заставляет шаговый двигатель “шагать” по сигналам управления. Стандартом де-факто в области управления ШД являются сигналы STEP/DIR/ENABLE. STEP это сигнал шага, DIR это сигнал направления вращения, ENABLE это сигнал включения драйвера.
Более научное определение – драйвер шагового двигателя это электронное силовое устройство, которое на основании цифровых сигналов управления управляет сильноточными/высоковольтными обмотками шагового двигателя и позволяет шаговому двигателю делать шаги (вращаться).
Управлять ШД намного сложнее чем обычным коллекторным двигателем — нужно в определенной последовательности переключать напряжения в обмотках с одновременным контролем тока. Поэтому для управления ШД разработаны специальные устройства — драйверы ШД. Драйвер ШД позволяет управлять вращением ротора ШД в соответствии с сигналами управления и электронным образом делить физический шаг ШД на более мелкие дискреты.
К драйверу ШД подключается источник питания, сам ШД (его обмотки) и сигналы управления. Стандартом по сигналам управления является управление сигналами STEP/DIR или CW/CCW и сигнал ENABLE.
Протокол STEP/DIR:
Сигнал STEP — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т.д.). Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал DIR — Потенциальный сигнал, сигнал направления. Логическая единица — ШД вращается по часовой стрелке, ноль — ШД вращается против часовой стрелки, или наоборот. Инвертировать сигнал DIR обычно можно либо из программы управления или поменять местами подключение фаз ШД в разъеме подключения в драйвере.
Протокол CW/CCW:
Сигнал CW — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т.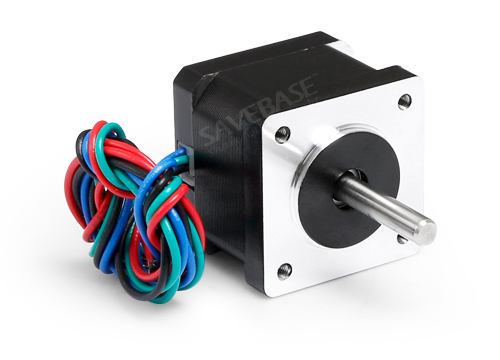 д.) по часовой стрелке. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
д.) по часовой стрелке. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал CW — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т. д.) против часовой стрелки. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал ENABLE — Потенциальный сигнал, сигнал включения/выключения драйвера. Обычно логика работы такая: логическая единица (подано 5В на вход) — драйвер ШД выключен и обмотки ШД обесточены, ноль (ничего не подано или 0В на вход) — драйвер ШД включен и обмотки ШД запитаны.
Драйверы ШД могут иметь дополнительные функции:
• Контроль перегрузок по току.
• Контроль превышения напряжения питания, защита от эффекта обратной ЭДС от ШД. При замедлении вращения, ШД вырабатывает напряжение, которое складывается с напряжением питания и кратковременно увеличивает его.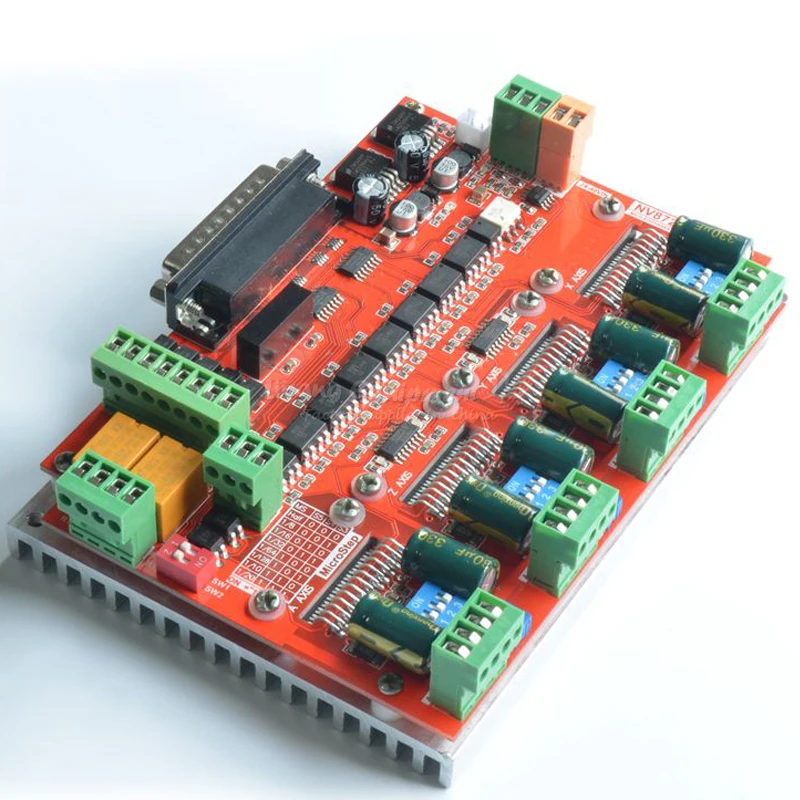 При более быстром замедлении, напряжение обратной ЭДС больше и больше скачок напряжения питания. Этот скачок напряжения питания может привести к выходу из строя драйвера, поэтому драйвер имеет защиту от скачков питающего напряжения. При превышении порогового значения напряжения питания драйвер отключается.
При более быстром замедлении, напряжение обратной ЭДС больше и больше скачок напряжения питания. Этот скачок напряжения питания может привести к выходу из строя драйвера, поэтому драйвер имеет защиту от скачков питающего напряжения. При превышении порогового значения напряжения питания драйвер отключается.
• Контроль переполюсовки при подключении сигналов управления и питающих напряжений.
• Режим автоматического снижения тока обмотки при простое (отсутствии сигнала STEP) для снижения нагрева ШД и потребляемого тока (режим AUTO-SLEEP).
• Автоматический компенсатор среднечастотного резонанса ШД. Резонанс обычно проявляется в диапазоне 6-12 об/сек, ШД начинает гудеть и ротор останавливается. Начало и сила резонанса сильно зависит от параметров ШД и его механической нагрузки. Автоматический компенсатор среднечастотного резонанса позволяет полностью исключить резонирование ШД и сделать его вращение равномерным и устойчивым во всем диапазоне частот.
• Схему изменения формы фазовых токов с увеличением частоты (морфинг, переход из режима микрошага в режим шага при увеличении частоты). ШД способен отдать заявленный в ТХ момент только в режиме полного шага, поэтому в обычном драйвере ШД без морфинга при использовании микрошага ШД работает на 70% от максимальной мощности. Драйвер ШД с морфингом позволяет получить от ШД максимальную отдачу по моменту во всем диапазоне частот.
• Встроенный генератор частоты STEP – удобная функция для пробного запуска драйвера без подключения к ПК или другому внешнему генератору частоты STEP. Также генератор будет полезен для построения простых систем перемещения без применения ПК.
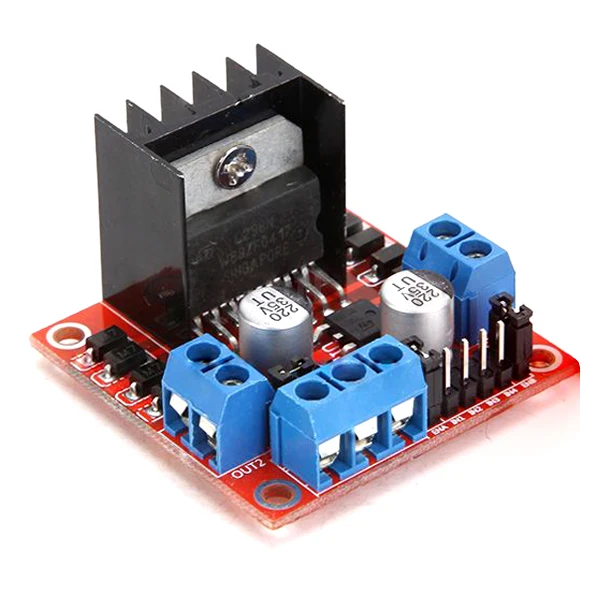
Драйверы и контроллеры шагового двигателя
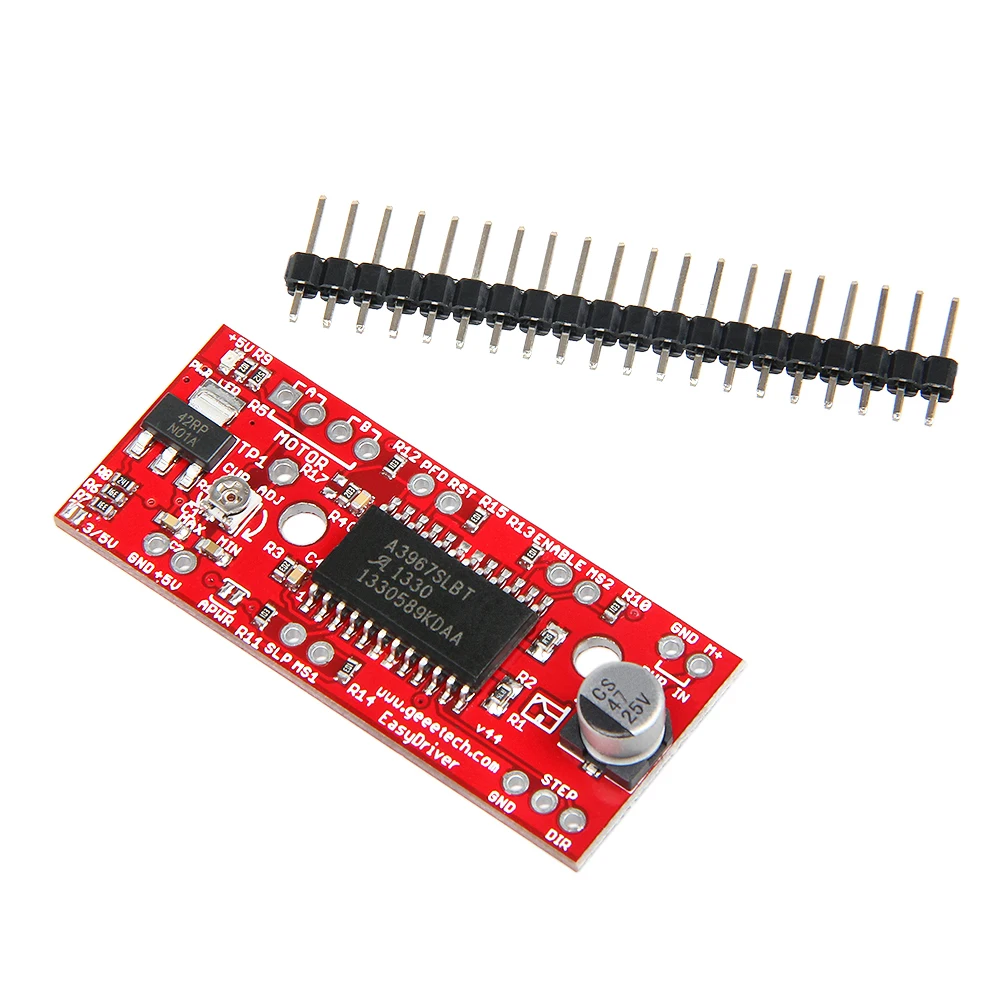
Для управления приводами требуется специальный драйвер шагового двигателяДрайвер представляет собой силовую часть со встроенным простейшим интерфейсом, основанным на комбинации ШАГ–НАПРАВЛЕНИЕ.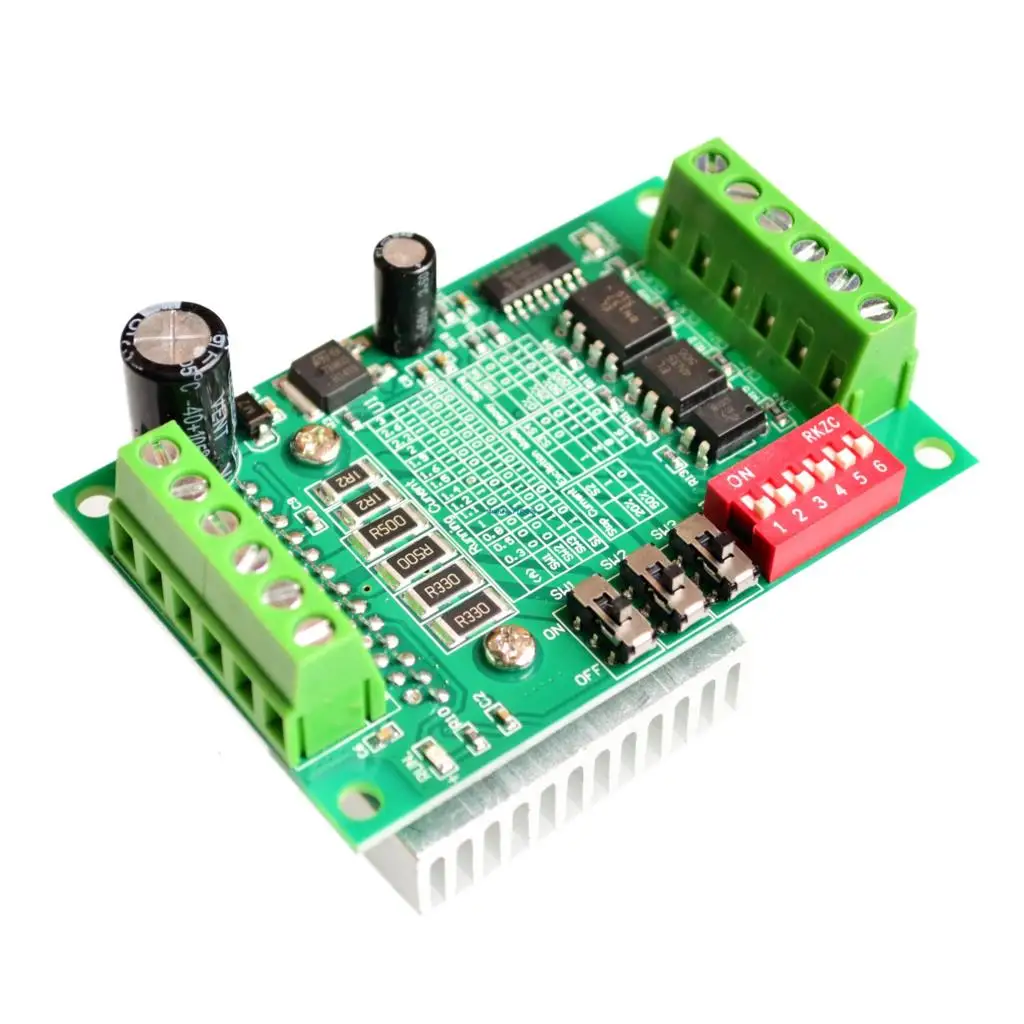
Драйвер шагового двигателя еще и усилитель мощности, который преобразует импульсы, получаемые от источника электрического тока, в перемещение вала. При этом каждый импульс вызывает перемещение вала на 1 шаг (или на 1 микрошаг).
Драйвер шагового двигателя снабжён специальной схемой, которая служит для выполнения трёх основных задач:
- Включать и выключать ток в обмотках, а также менять его направление. При выполнении этой задачи системы управления электроприводом работают без сбоев.
- Поддерживать заданное значение тока.
- Обеспечивать как можно более быстрое нарастание и спад тока для достижения требуемых скоростных характеристик. Скоростные характеристики в свою очередь качественным образом влияют на управление шаговым двигателем.
Драйверы подразделяются на несколько типов, каждый из которых определяет мощность вала двигателя.
Следует отметить, что современные технологии, по которым изготавливается привод шагового двигателя, постоянно совершенствуются.%20.jpg)
Кроме того, одной из основных деталей является контроллер управления шаговым двигателем. Как правило, контроллеры для шагового двигателя изготавливаются на базе промышленных микроконтроллеров и могут быть как программными, так и аппаратными. Программные контроллеры для шагового двигателя применяются тогда, когда круг решаемых ими задач небольшой. Цена такого программного контроллера намного ниже аппаратного.
Контроллеры для шагового двигателя могут предназначаться как для униполярных двигателей, так и для двигателей других типов. При этом средний ток обмотки может достигать 2,5 А.
Контроллер шагового двигателя представляет собой комплект из силовой части (драйвер) и устройство, расширяющее возможности управления двигателем (интеллектуальная часть).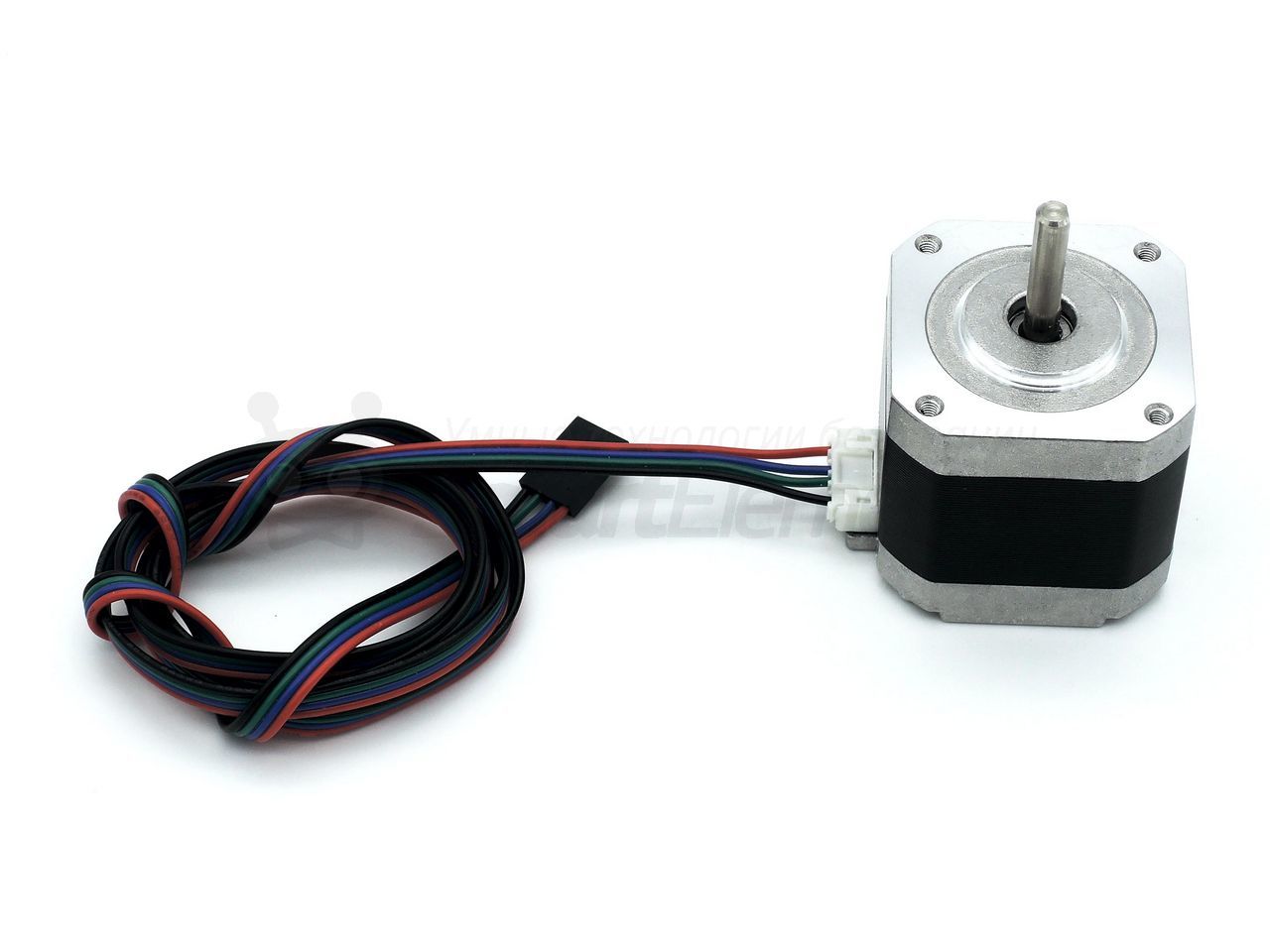
Данный компонент шагового двигателя обладает рядом достоинств. Прежде всего, контроллер управления шаговым двигателем имеет возможность передавать сигналы ШАГ–НАПРАВЛЕНИЕ.
Преимущества использования контроллеров для шагового двигателя:
- Возможность подключения к компьютеру. В зависимости от модели и конструкции контроллер управления шаговым двигателем подключается к компьютеру и регулируется с его помощью.
- Многократное перепрограммирование. В настоящее время достаточно купить только один контроллер шагового двигателя. При этом при переориентации производства или расширении перечня задач его можно перепрограммировать для выполнения новых функций.
- Широкий модельный ряд контроллеров как отечественных, так и зарубежных производителей позволяет купить контроллер шагового двигателя с расширенными функциями. Контроллеры с расширенными функциями имеют в своем составе программируемый логический контроллер (привод работает в автономном режиме по записанной в него программе, это позволяет получить готовое устройство для выполнения определённого технологического процесса на основе одного только контроллера шагового двигателя).

Устройство управления электроприводом, оснащенное контроллером, решает следующие задачи:
- Достижение высокой точности. Это связано с конструкцией, благодаря которой устройства управления шаговыми двигателями делают до 20000 шагов за оборот за счет микрошага.
- Работа с программным обеспечением. К ним относятся производственные программы типа Kcam и Mach.
- Работа в различных режимах.
Устройства управления шаговыми двигателями могут функционировать как on-line (то есть подчиняясь командам компьютера) так и off-line (при помощи программы с внешнего устройства, например, флеш-накопителя). Применяется также совмещённый режим (он особенно выгоден при управлении одинаковыми процессами с меняющимися параметрами, управлении контрольными процедурами и опросе параметров, осуществляемом с вашего компьютера)
Блок управления шаговым двигателем.
Вместе с шаговым двигателем работает блок управления шаговым двигателем, который является источником тока для двигателя, осуществляет при необходимости дробление основного углового шага и выполняет коммутацию фаз двигателя.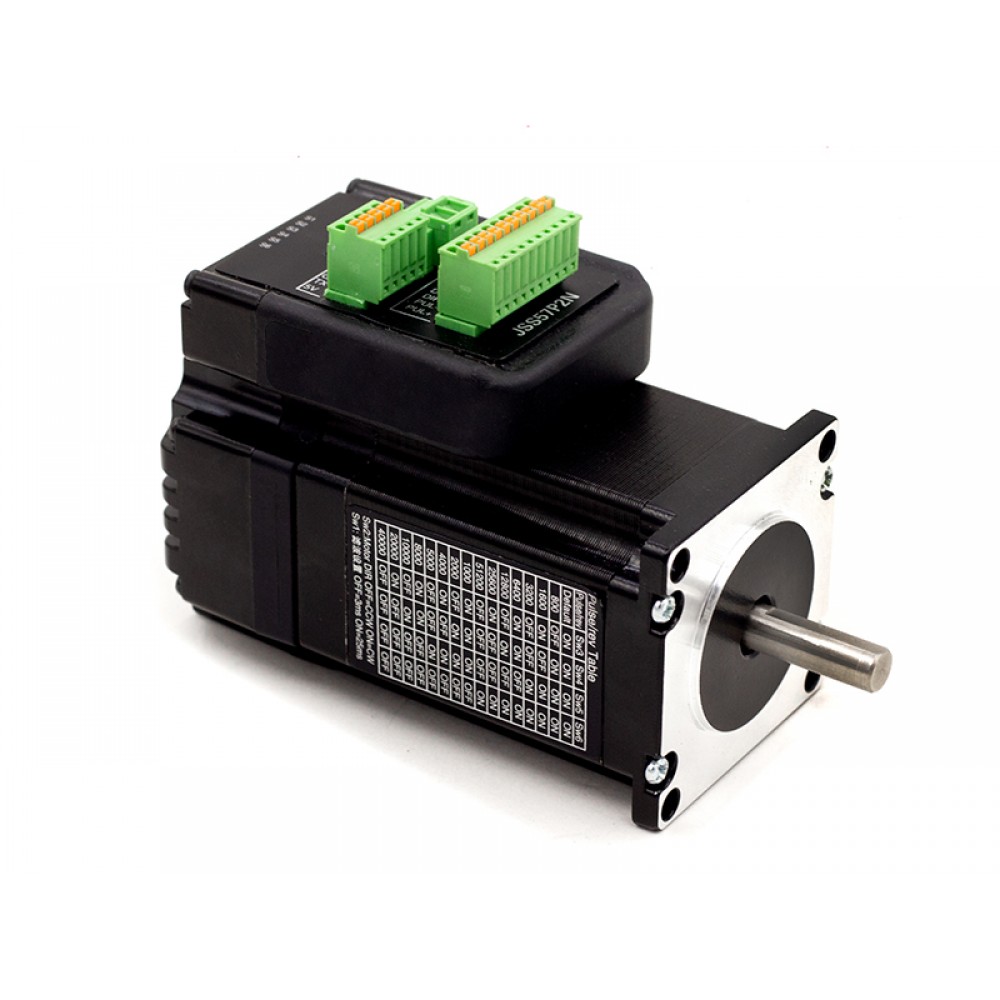 Блок управления обычно поддерживает как ручное, так и автоматическое управление электроприводами.
Блок управления обычно поддерживает как ручное, так и автоматическое управление электроприводами.
Современный блок управления электроприводом одновременно является и многофункциональным устройством – с возможностью программирования и синхронизации с другими устройствами, а также с возможностью включить автоматическое управление электроприводами. Существуют решения, при которых блок управления электроприводом программируемый.
В частности, блок управления шаговым двигателем может управляться с помощью компьютера. Подключение происходит через LPT-порт (в том числе и с программами для станков с ЧПУ), через COM-порт – получая специальные команды для определения характера (и алгоритма) движения шагового двигателя, в автономном автоматическом режиме без помощи компьютера или внешнего контроллера (если требуется автоматическое управление электроприводами технологических процессов) или в ручном режиме, когда скорость движения регулируется потенциометром, а направление движения – датчиком реверса.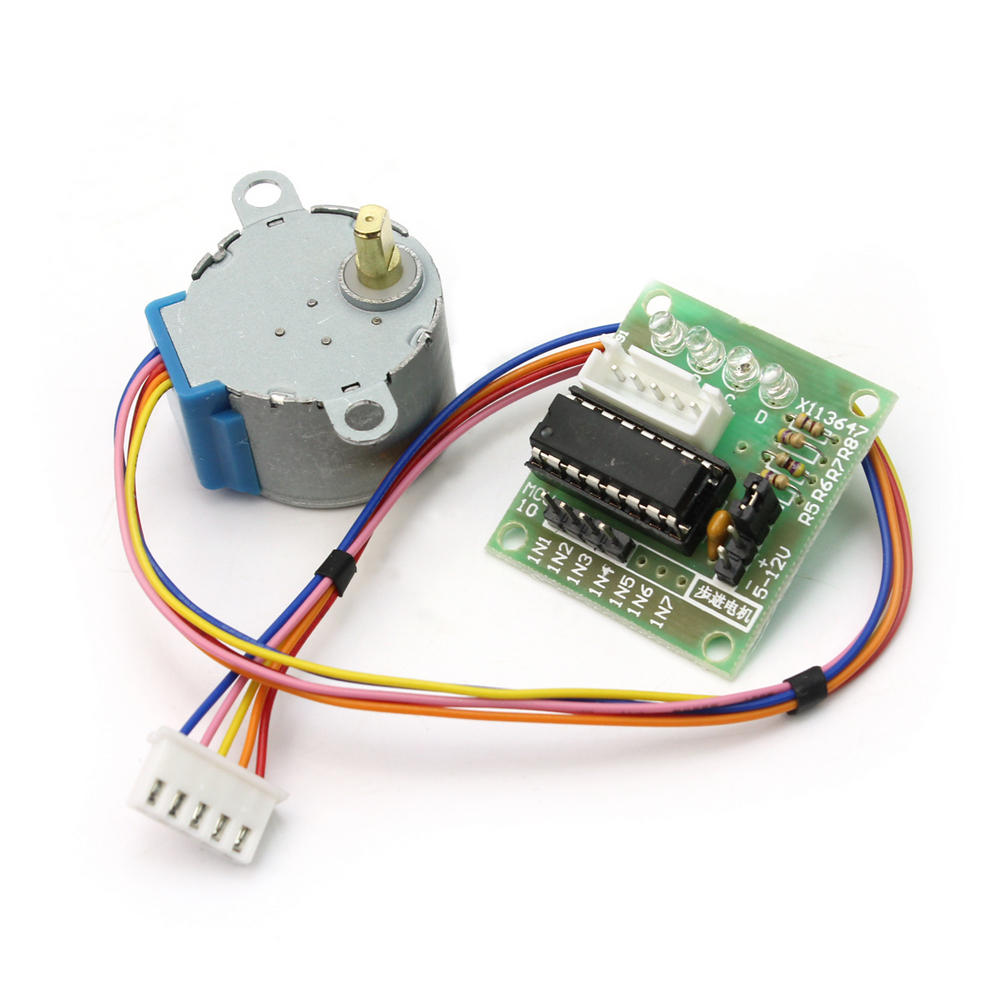
Учитывая разнообразие шаговых двигателей, их управление зависит от типа самого двигателя. И в соответствии с этим и выбирается блок управления электроприводом.
Биполярный привод шагового двигателя и его управление.
Помимо биполярных двигателей существуют так же униполярные двигатели, обмотки которых имеют средние отводы, служащие для подключения к общему проводу – «земле».
Полный оборот выходного вала двигателя состоит из N-ного количества шагов. Большинство двигателей рассчитаны на шаг 1,8 градуса, таким образом, полный оборот выходного вала будет совершён за 360/1,8 = 200 шагов.
Привод шагового двигателя меняет положение выходного вала на один шаг при подаче на одну из обмоток напряжения питания. Направление протекания тока через обмотку при этом указывает на направление вращения. Для совершения следующего шага необходимо выключить первую обмотку и подать питание на вторую, соблюдая направление тока через обмотку. Итого за 100 полных циклов поочерёдной запитки обмоток мотор сделает ровно один оборот выходного вала.
Поэтому для направления токов требуются устройства управления шаговыми двигателями.
Способы управления электроприводом.
Для управления приводами существует ряд способов, применяемых в зависимости от характера решаемых задач и назначения шагового двигателя в разных областях промышленности.
- Одиночные импульсы. Данный способ управления электроприводом считается самым простым. Он основан на одновременном подключении только одной катушки. Для совершения полного оборота ротора требуется 48 импульсов. При этом каждый перемещает ротор на 7,5 градусов.
- Двойной импульс. В этом случае системы управления шаговыми двигателями основаны на одновременном подключении двух соседних катушек. Для полного оборота ротора требуется также 48 импульсов. Каждый импульс перемещает ротор на 7,5 градусов.
- Комбинированные импульсы. Суть в том, что устройство управления электроприводом чередует первый и второй способы. Двигателю требуется 96 импульсов, чтобы совершить один оборот.
 Каждый импульс перемещает ротор на 3,75 градуса.
Каждый импульс перемещает ротор на 3,75 градуса.
Остались вопросы касательно управления электроприводом? Задайте их сотрудникам компании «Степмотор» и примите решение о приобретении системы управления шаговыми двигателями! Ведь купить контроллер шагового двигателя именно у нас – значит, получить качественный промышленный продукт за разумную цену.
Драйверы и контроллеры шаговых двигателей
Драйверы и контроллеры шаговых двигателей- Фрезерно-гравировальныe станки
- Лазерные станки с ЧПУ
- Станок плазменной резки
- 3D Принтеры
- Покрасочный станок
- Комплектующие к ЧПУ
- Комплектующие для лазерных станков
- Комплектующие для волоконных лазеров
- Готовые модули
- Режущий инструмент
- Фрезы ARDEN для ручных и ЧПУ фрезеров
- Фрезы пазовые прямые
- Фрезы для выравнивания поверхности
- Фрезы V-образные
- Фрезы кромочные прямые
- Фрезы для врезания петель и замков
- Фрезы пазовые галтельные
- Фрезы радиусные полукруглые
- Фрезы “Ласточкин хвост”
- Фрезы пазовые
- Фрезы четвертные
- Фрезы профильные
- Фреза “Гусёк” (псевдофилёнка), 222 серия
- Фрезы “Гусёк” 210 серия
- Фрезы “Тройной внешний радиус”, 323 серия
- Фрезы “Декоративный гусёк” 212 серия
- Фрезы “Классический узор”, 211 серия
- Фрезы “Тройной внутренний радиус”, 324 серия
- Фрезы “Шар” 208 серия
- Фрезы Бычий нос “Катушка”, 330 серия
- Фрезы внешнее и внутреннее скругление 2 в 1
- Фрезы для скругления удлиненные
- Фрезы мультипрофильные (Карниз), 351 серия
- Фрезы овальное скругление (Жалюзи)
- Фрезы превсофиленка “Волна-1”
- Фрезы профильные “Ручка” 502 серии
- Фрезы профильные “Углубленный шар”, 329 серия
- Фрезы профильные “Французская классика”, 352 серия
- Фрезы профильные для плинтусов, 403 серия
- Фрезы фигурные “Классический гусёк”, 311 серия
- Фрезы филёночные, 416 серия
- Фрезы для сращивания и мебельной обвязки
- Комплектующие к фрезам ARDEN
- Набор радиальных и фасочных фрез
- Комплектующие для плазменной резки
- Пневматическое оборудование
- Дисковые пилы
- Оборудование для покраски
- Ручной инструмент
Драйвер шагового двигателя A4988 с радиатором
Драйвер шагового двигателя A4988 – простой и доступный способ управления шаговыми двигателями, может использоваться в маломощных станках ЧПУ, 3D принтерах и других устройствах с применением шаговых двигателей.
Параметры драйвера:
- Напряжения питания шаговых двигателей: 8…35 вольт постоянного тока
- Дробление шага: в 1, 1/2, 1/4, 1/8, 1/16 раз
- Протокол управления: STEP/DIR
- Напряжение питания логики микросхемы: 3…5.5 вольт постоянного тока
- Защита от
- перегрева
- перегрузки по току
- пониженного напряжения
- короткого замыкания на землю
- короткого замыкания обмоток двигателя
- Максимальный ток на фазу: до 1 ампер без радиатора, до 2 ампер с радиатором
- Интеллектуальное управление режимом затухания тока
- Габариты модуля: 20*15*10 мм
- Габариты радиатора: 9*5*9 мм
В основе драйвера шагового двигателя – специализированная микросхема А4988, которая включает в себя транслятор интерфеса STEP/DIR , калькулятор микрошага, схему огрнаичения тока, два Н-моста из полевых транзисторов в защитными диодами и драйверы для них.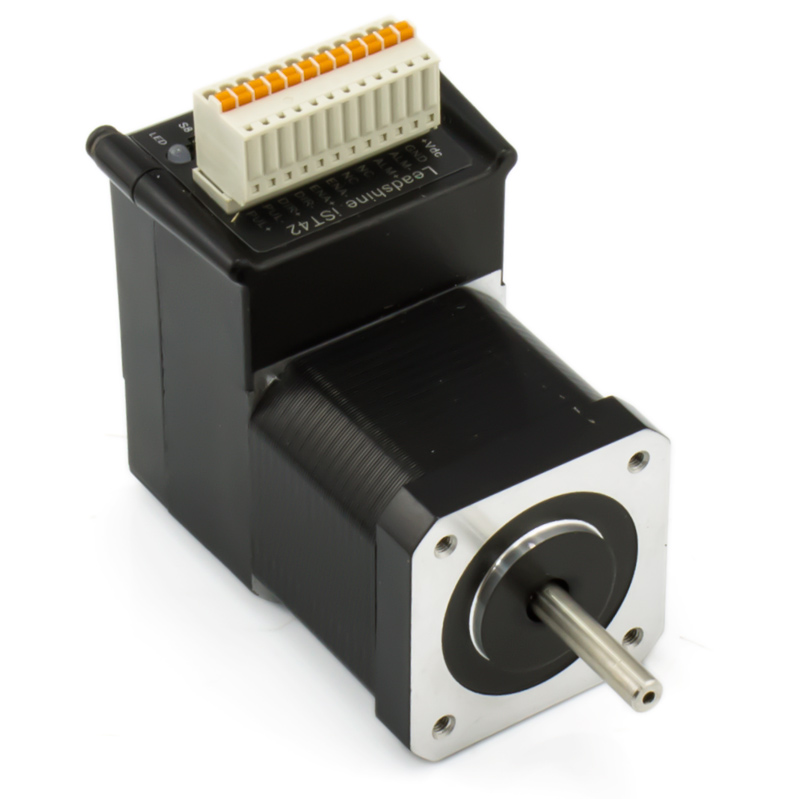
Диаграма А4988:
Рекомендуемая даташитом схема подключения микросхемы А4988:
Реальная принципиальная схема драйвера А4988:
Расположение выводов:
Подключение драйвера (на примере использования ШД NEMA17 и Arduino Uno в качестве управляющего микроконтроллера):
Чтобы использовать драйвер необходимо выполнить следующие действия:
1. Подключить шаговый двигатель.
Подключение шагового двигателя производится напрямую к выводом драйвера 1A-1B и 2A-2B. Стоит отметить, что драйвер предназначен для подключения биполярных шаговых двигателей, имеющих две обмотки. Но этот драйвер также можно использовать и с униполярными двигателями. Как подключить униполярные двигатели к биполярному шаговому двигателю читайте в статье на нашем сайте.
2. Подать питание.
Драйвер требует двойного питания: 3-5 вольт для работы логической части микросхемы (выводы Vdd и GND) и 8-35 вольт (в зависимости от используемого шагового двигателя) для силовой части (выводы Vmot и GND). На примере выше питание логической части осуществляется от платы Arduino Uno и составляет 5 вольт. Питание силовой части рекомендуется осуществлять от отдельного блока питания. Кроме того, рекомендуется устанавливать электролитический конденсатор в цепи питания силовой части, емкостью не менее 470 микрафарад и рабочим напряжением выше напряжения питания силовой части.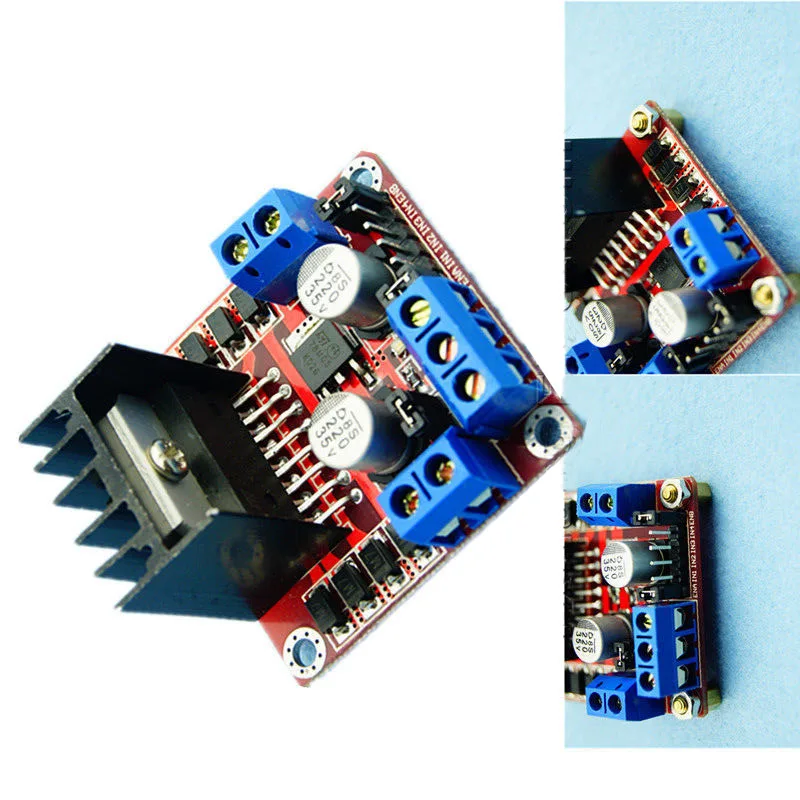
3. Установить режим микрошага.
Современные шаговые двигатели позволяют управлять углом поворота оси с достаточно большой точностью. Например, шаговый двигатель типоразмера NEMA17 имеет показатель в 200 шагов на оборот вала двигателя, что соответствует минимальному углу 1.8 градуса. Для некоторых задач такой точности может оказаться недостаточно. Более того, сейчас ещё можно встретить устаревшие шаговые двигатели (как правило униполярные, применявшиеся в матричных принтерах), которые имеют всего 48 шагов на оборот (7.5 градусов на шаг). К тому же шаговый двигатель между этими фиксированными положениями перемещается рывками. Для увеличения точности позиционирования и уменьшения рывков при перемещении используют функцию микрошага – разбиение одного шага на несколько частей. Драйвет А4988 способен делить шаги двигателя в 2, 4, 8 или 16 раз, что позволяет получить до 16 раз более точное позиционирование угла поворота (0.1125 градуса при делении на 16) и сгладить рывки перемещения. Для установки микрошага используются выводы MS1-3. Эти выводы подтянуты к “земле” встроенными в драйвер резисторами и по умолчанию принимают значение логического нуля. Для активации дробления шага необходимо подключить выводы MS1-3 к положительному полюсу питания логической части (3-5 вольт). Для вычисления величины деления микрошага используется следующая таблица:
Для установки микрошага используются выводы MS1-3. Эти выводы подтянуты к “земле” встроенными в драйвер резисторами и по умолчанию принимают значение логического нуля. Для активации дробления шага необходимо подключить выводы MS1-3 к положительному полюсу питания логической части (3-5 вольт). Для вычисления величины деления микрошага используется следующая таблица:
|
На примере подключения выше все конфигурационные выводы подтянуты к положительному полюсу питания логической части, что дает дробление шага в 16 раз. При включении дробления шага сигнал на выходе силовой части драйвера принимает форму ступенчатой синусоиды (изображена зеленым цветом), пример на изображении ниже. Сигнал на входе STEP изображен в нижней части осциллограммы синим цветом и представляет собой прямоугольные импульсы. Данная осциллограмма отлично иллюстрирует функцию дробления шага драйверами шагового мотора.
При включении дробления шага сигнал на выходе силовой части драйвера принимает форму ступенчатой синусоиды (изображена зеленым цветом), пример на изображении ниже. Сигнал на входе STEP изображен в нижней части осциллограммы синим цветом и представляет собой прямоугольные импульсы. Данная осциллограмма отлично иллюстрирует функцию дробления шага драйверами шагового мотора.
Более подробные осциллограммы для каждого режима дробления шага приведены на страницах 14-16 даташита на микросхему А4988.
4. Установить конфигурацию работы драйвера.
Кроме входов MS1-3 драйвер А4988 имеет три входа конфигурации, которые управляют питанием драйвера:
- SLEEP – подача низкого логического уровня переводит микросхему драйвера в спящий режим, подача высокого логического уровня выводит драйвер из спящего режима. Но на самом деле подача высокого логического уровня не нужна,так-как вывод SLEEP подтянут к положительному полюсу логической части питания драйвера через внутренний резистор.
- RESET – подача низкого логического уровня сбрасывает логику микросхемы (транслятор) в предопределенное состояние. Также, пока на выводе RESET присутствует логическая единица драйвер игнорирует все входящщие сигналы управления. Зачастую вход RESET не используют для сброса транслятора и соединяют его с выводом SLEEP на котором присутствует логическая 1, что и изображено на вышепреведенной схеме подключения.
- ENABLE – вход включения драйвера, активируется логическим 0 (присутствует по умолчанию), логическая 1 запрещает работу драйвера. Данный вывод можно не использовать, так как встроенный подтягивающий резистор всегда разрешает работу драйвера, тем не менее в ЧПУ станках и 3D принтерах данный вывод активно используется для разблокировки шаговых двигателей для ручного перемещения без обесточивания всего станка, либо для снижения энергопотребления.
5. Настроить ограничение силы тока шаговых двигателей.
Важно ограничить силу тока, протекающего через обмотки шагового двигателя. Для этого на плате драйвера предусмотрен подстроечный резистор, который задает опорное напряжение на выводе 17 микросхемы А4988. Далее, микросхема A4988 на основе опорного напряжения и данных, полученных по каналам обратной связи, ограничивает силу тока на обмотках шагового двигателя.
Для этого на плате драйвера предусмотрен подстроечный резистор, который задает опорное напряжение на выводе 17 микросхемы А4988. Далее, микросхема A4988 на основе опорного напряжения и данных, полученных по каналам обратной связи, ограничивает силу тока на обмотках шагового двигателя.
Правильно установить силу тока нам поможет даташит, который предлагает формулу для расчета тока: ITripMAX = Vref / ( 8 * Rs), где Vref – напряжение на входе 17 микросхемы драйвера, Rs – номинал резисторов R7 и R8 (см. принципиальную схему драйвера), которые могут иметь номинал 0,1 или 0,05 Ом. Необходимую силу тока можно получить из даташита на шаговый двигатель, номинал сопротивления Rs также известен, поэтому формула приобретает вид Vref = ITripMAX * 8 * Rs
Для примера я приведу расчет опорного напряжения для шагового двигателя NEMA 17 OK42STh43-1334A, который имеет номинальный ток 1.33A. Сопротивления Rs в моем случае имеют номинал 0,1 Ом, поэтому опорное напряжение равно 1,33*0,1*8= 1,064 вольт. Но в таком случае шаговый двигатель будет работать не пределе своих возможностей, поэтому рекомендуется ограничить ток 70% от максимального, а это значит, что полученное опорное напряжение необходимо умножить на 0.7, и в итоге я получаю 1,064*0,7 = 0,7448 вольт.
Но в таком случае шаговый двигатель будет работать не пределе своих возможностей, поэтому рекомендуется ограничить ток 70% от максимального, а это значит, что полученное опорное напряжение необходимо умножить на 0.7, и в итоге я получаю 1,064*0,7 = 0,7448 вольт.
Чтобы измерить опорное напряжение, необходимо измерить напряжение между выводом GND и центральной частью подстроечного резистора, при необходимости подстраивая резистор в определенное положение.
Работа без радиатора допустима при токе не более 1 ампера, но в любом случае мы рекомендуем использовать радиатор, поставляющийся в комплекте с драйвером, а при необходимости использовать активное воздушное охлаждение.
6. Подать управляющие сигналы.
Управление мотором осуществляется по протоколу STEP/DIR, сигналы которого подаются на одноименные выводы драйвера.
- DIR (direction) – задает направление вращения шагового двигателя.
 Направление вращения зависит не только от значения на входе DIR, но и от полярности подключения обмоток шагового двигателя. Если шаговый двигатель вращается не в ту сторону, то можно изменить значение на входе DIR, либо поменять местами выводы одной из обмоток шагового двигателя.
Направление вращения зависит не только от значения на входе DIR, но и от полярности подключения обмоток шагового двигателя. Если шаговый двигатель вращается не в ту сторону, то можно изменить значение на входе DIR, либо поменять местами выводы одной из обмоток шагового двигателя. - STEP – импульс шага, представляет собой прямоугольные импульсы. Один импульс шага поварачивает вал шагового двигателя на определенный угол, например, для двигателей типоразмера Nema17 на 1.8 градусов при отключенном дроблении шага. При включенном дроблении шага угол поворота на один шаг уменьшается пропорционально значению дробления шага.
Стоит отметить, что напряжение импульсов STEP/DIR не должно превышать 5,5 вольт. Источниками управляющих импульсов могут служить как микроконтроллеры, так и простые генераторы прямоугольных импульсов, например, мультивибраторы.
В случае использования драйвера А4988 со специализированными платами для управления станками ЧПУ и 3D принтерами из всех вышеперечисленных шагов подключения драйвера необходимо только осуществить настройку силы тока, так-как остальные нюансы подключения шагового двигателя учтены при проектировании печатной платы.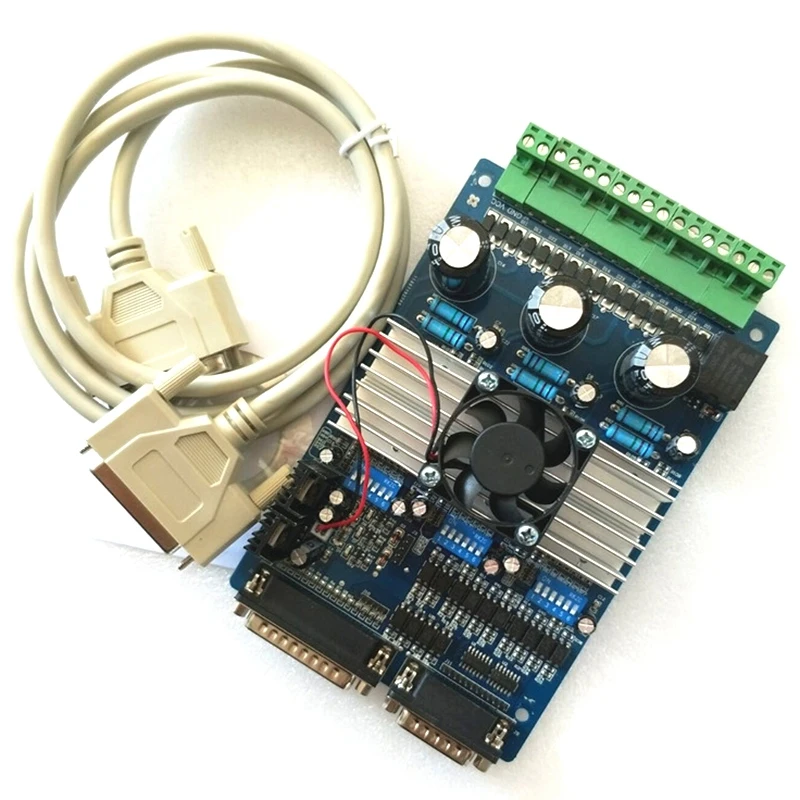
Шаговый привод для станков с ЧПУ
Драйвер 3DM2283 – цифровой блок управления трехфазным шаговым двигателем с питанием от сети ~220 В. Благодаря большому току фаз и напряжению питания 220 В драйвер 3DM2283 способен управлять широким диапазоном 3х-фазных шаговых двигателей 90…
Артикул: Art-291 Наличие Много
Ток до 4,2 А, напряжение 20-50 В. Драйвер DМ542 – популярный и общедоступный микро шаговый драйвер шагового двигателя. Драйвер DМ542 произведен с использованием современных технологий. Оптимально подходит для широкого спектра шаговых двигат…
Артикул: Art-014 Наличие Много
Драйвер DM542-05 Leadshine предназначент для управления шаговым двигателем с фланцем Nema17 и Nema23 и рабочим током до 4,2 А. Драйвер DM542-05 Leadshine – популярный драйвер шагового двигателя, произведен с использованием современных техно…
Драйвер DM542-05 Leadshine – популярный драйвер шагового двигателя, произведен с использованием современных техно…
Артикул: Art-164 Наличие Много
Драйвер DM556 предназначен для управления шаговым двигателем Nema 23 с рабочим током до 5,6 А. Драйвер DM556 – это современный цифровой драйвер шагового двигателя с возможностью точной настройки параметров через порт RS232 и компь…
Артикул: Art-311 Наличие Много
Ток до 7,2 А, напряжение 24-110 В. Драйвер DM860H предназначен для управления шаговым двигателем Nema34 с фланцем 86 мм и рабочим током до 7,2 А. Драйвер DM860H – популярный цифровой драйвер шагового двигателя, произведен с использованием с…
Артикул: Art-171 Наличие Много
Ток до 8,2 А, напряжение 30-100 В постоянного тока или 20-70 В переменного тока. Драйвер HB860H – микрошаговый драйвер шагового двигателя с энкодером. Драйвер HB860H предназначен для управления шаговым двигателем Nema34 с рабочим током до 8…
Драйвер HB860H – микрошаговый драйвер шагового двигателя с энкодером. Драйвер HB860H предназначен для управления шаговым двигателем Nema34 с рабочим током до 8…
Артикул: Art-258 Наличие Много
Ток до 8,0 А, напряжение 20-60 В постоянного тока. Драйвер HBS57 – микрошаговый драйвер шагового двигателя с энкодером. Драйвер HBS57 предназначен для управления шаговым двигателем Nema23 с рабочим током до 8,0 А. Драйвер HBS57 совместно с …
Артикул: Art-197 Наличие Много
Ток до 8,2 А, напряжение 24-100 В постоянного тока или 18-70 В переменного тока.
Драйвер HBS86H (для ШД с энкодером) – микрошаговый драйвер шагового двигателя с энкодером, произведен с использованием современных технологий. Драйвер HBS86H с…
Драйвер HBS86H с…
Артикул: Art-151 Наличие Много
Ток до 7,2 А, напряжение 24-80 В. Драйвер MA860 – популярный и общедоступный микро шаговый драйвер шагового двигателя. Драйвер MA860 произведен с использованием современных технологий. Оптимально подходит для широкого спектра шаговых двигат…
Артикул: Art-015 Наличие Много
ZDM-2HA865 – это цифровой шаговый драйвер нового поколения с обратной связью через энкодер. Драйвер ZDM-2HA865 использует передовые технологии управления векторного типа, что значительно улучшает работу шагового двигателя, снижает степень н…
Артикул: Art-305 Наличие Много
Драйвер ТВ6600 (ток до 4 А, напряжение 12 – 40 В. ) – электронный блок, бюджетной серии, управления шаговым двигателем.
Драйвер шагового двигателя ТВ6600 стал популярным драйвером среди производителей самодельных систем с ЧПУ.
Все управляющи…
) – электронный блок, бюджетной серии, управления шаговым двигателем.
Драйвер шагового двигателя ТВ6600 стал популярным драйвером среди производителей самодельных систем с ЧПУ.
Все управляющи…
Артикул: Art-016 Наличие Много
Шаговый двигатель 57EBP143ALC-TF0B с энкодером и тормозом. Nema 23 фланец 57 х 57 мм, момент на валу 3 Нм, длина корпуса 176 мм. Характеристики шагового двигателя 57EBP143ALC: Момент удержания 3 Нм, Ток фазы 4 А, Напряжение 24-48 В, Индукт…
Артикул: Art-320 Наличие Много
Шаговый двигатель 57HSE2N-D25 с энкодером. Nema 23 фланец 57 х 57 мм, длина корпуса – 99 мм.
Характеристики шагового двигателя 57HSE2N-D25:
Момент удержания 2.0 Нм,
Ток фазы 4.2 А,
Шаг 1. 8 град.
Шаговый двигатель 57HSE2N-D25 с энкодером при…
8 град.
Шаговый двигатель 57HSE2N-D25 с энкодером при…
Артикул: Art-198 Наличие Много
Шаговый двигатель 86EBP147ALC-TK0B с энкодером и тормозом. Nema 34 фланец 86 х 86 мм, момент на валу 8.5 Нм, длина корпуса – 190 мм. Характеристики шагового двигателя 86EBP147ALC: Момент удержания 8,5 Нм, Ток фазы 6 А, Напряжение 24-110 В,…
Артикул: Art-307 Наличие Много
Шаговый двигатель 86HSE4N-BC38 с энкодером. Nema 34 фланец 86 х 86 мм, длина корпуса – 101 мм. Характеристики шагового двигателя 86HSE4N-BC38: Момент удержания 4,5 Нм, Ток фазы 6 А, Индуктивность 3.7 мГн, Сопротивление обмотки 0,45 Ом, Шаг …
Артикул: Art-152 Наличие Много
Шаговый двигатель 86HSE8N-B32 с энкодером.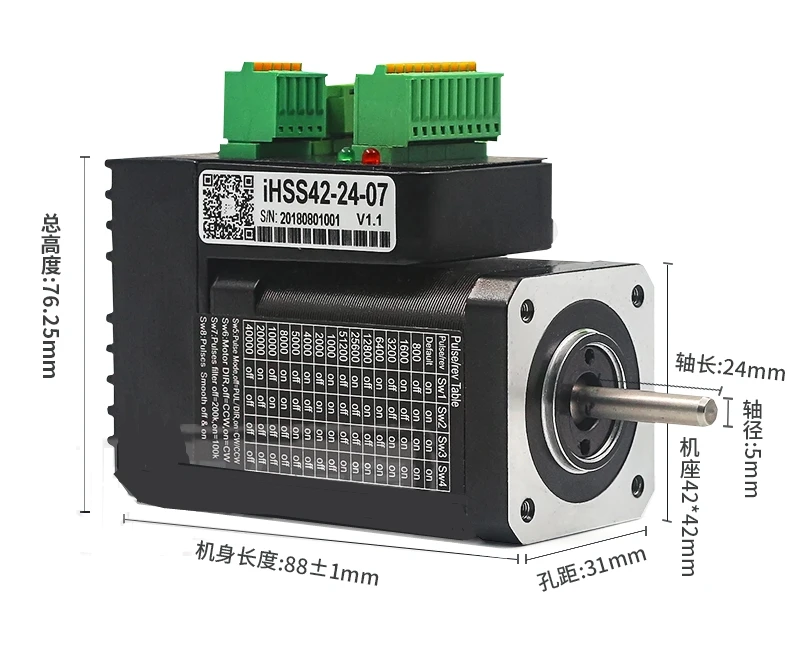 Nema 34 Фланец 86 х 86 мм, длина корпуса – 137 мм.
Характеристики шагового двигателя 86HSE8N-B32:
Момент удержания 8,0 Нм,
Ток фазы 6 А,
Индуктивность 3.7 мГн,
Сопротивление обмотки 0,44 Ом,
Шаг 1….
Nema 34 Фланец 86 х 86 мм, длина корпуса – 137 мм.
Характеристики шагового двигателя 86HSE8N-B32:
Момент удержания 8,0 Нм,
Ток фазы 6 А,
Индуктивность 3.7 мГн,
Сопротивление обмотки 0,44 Ом,
Шаг 1….
Артикул: Art-153 Наличие Много
Шаговый двигатель J-5718HBS3401 с энкодером. Nema 23 фланец 57 х 57 мм, Момент на валу 2,3 Нм, Длина корпуса 106,5 мм, Ток фазы 4,4 А, Индуктивность 2,5 мГн, Сопротивление обмотки 0,76 Ом, Шаг 1.8 град. Шаговый серво-двигатель с энкодером …
Артикул: Art-272 Наличие Много
Шаговый двигатель J-5718HBS6401 с энкодером.
Фланец NEMA 23 (57 х 57 мм),
Момент на валу 3.6 Нм,
Длина корпуса 144 мм,
Ток фазы 4 А,
Индуктивность 4.5 мГн,
Сопротивление обмотки 1,16 Ом,
Шаг 1. 8 град. Шаговый двигатель с энкодером J-5718HB…
8 град. Шаговый двигатель с энкодером J-5718HB…
Артикул: Art-273 Наличие Много
Шаговый двигатель J-8618HBS5401 с энкодером. Nema 34 фланец 86 х 86 мм, длина корпуса – 180 мм (без энкодера 159 мм). Характеристики шагового двигателя J-8618HBS5401: Момент удержания 12,0 Нм. Ток фазы – 6 А. Индуктивность 10.1 мГн. Сопроти…
Артикул: Art-257 Наличие Много
Трёхфазный шаговый двигатель 110ВYG350C для станка с ЧПУ. Фланец Nema 42 (110 x 100 мм). Двигатель 110ВYG350C обладает высоким моментом на валу 16 Нм при высокой скорости. Благодаря этим характеристикам данный шаговый двигатель примени…
Артикул: Art-292 Наличие Много
Шаговый двигатель J-5718HB3401, Nema 23 фланец 57 х 57 мм, длина корпуса 76 мм. Характеристики шагового двигателя J-5718HB3401:
Момент удержания 2,3 Нм,
Ток фазы 4,4 А,
Индуктивность 2.5 мГн,
Сопротивление обмотки 0,76 Ом,
Шаг 1.8 град.
Шаг…
Характеристики шагового двигателя J-5718HB3401:
Момент удержания 2,3 Нм,
Ток фазы 4,4 А,
Индуктивность 2.5 мГн,
Сопротивление обмотки 0,76 Ом,
Шаг 1.8 град.
Шаг…
Артикул: Art-168 Наличие Много
Шаговый двигатель J-5718HB6401, Nema 23 фланец 57 х 57 мм, длина корпуса – 113 мм. Характеристики шагового двигателя J-5718HB6401: Момент удержания 3,6 Нм, Ток фазы 4 А, Индуктивность 4.5 мГн, Сопротивление обмотки 1,16 Ом, Шаг 1.8 град, Ве…
Артикул: Art-147 Наличие Много
Шаговый двигатель J-8618HB2401. Nema 34 фланец 86 х 86 мм, длина корпуса – 96 мм.
Характеристики шагового двигателя J-8618HB2401:
Момент удержания 6,08 Нм,
Ток фазы 6 А,
Индуктивность 4.7 мГн,
Сопротивление обмотки 0,46 Ом,
Шаг 1. 8 град.
Ша…
8 град.
Ша…
Артикул: Art-163 Наличие Много
Шаговый двигатель J-8618HB3401, Nema 34 фланец 86 х 86 мм, длина корпуса 119,5 мм. Характеристики шагового двигателя J-8618HB3401: Момент на валу 8,0 Нм, Длина корпуса 119,5 мм, Ток фазы 6 А, Индуктивность 7 мГн, Сопротивление обмотки 0,62…
Артикул: Art-271 Наличие Много
Шаговый двигатель J-8618HB5401. Nema 34, фланец 86 х 86 мм, длина корпуса 159 мм. Характеристики шагового двигателяJ-8618HB5401: Момент удержания 12,0 Нм, Ток фазы 6,0 А, Индуктивность 10.1 мГн, Сопротивление обмотки 0,85 Ом, Диаметр вала 1…
Артикул: Art-265 Наличие Много
Шаговый двигатель J-8618HB6401, фланец Nema 34 (86 х 86 мм), длина корпуса 79,5 мм. Характеристики шагового двигателя J-8618HB6401:
Момент на валу 4,0 Нм,
Ток фазы 6 А,
Индуктивность 15,2 мГн,
Сопротивление обмотки 1,6 Ом,
Шаг 1.8 град. Ш…
Характеристики шагового двигателя J-8618HB6401:
Момент на валу 4,0 Нм,
Ток фазы 6 А,
Индуктивность 15,2 мГн,
Сопротивление обмотки 1,6 Ом,
Шаг 1.8 град. Ш…
Артикул: Art-270 Наличие Много
Трёхфазный шаговый двигатель 110ВYG350CS с тормозом на валу. Фланец Nema 42 (110 x 100 мм). Двигатель 110ВYG350CS имеет три обмотки, соединенные в треугольник с напряжением питания 220 В, поэтому этому он обладает высоким моментом на валу п…
Артикул: Art-293 Наличие Много
Шаговый двигатель J-8618HBR3401 с тормозом, Nema 34 фланец 86 х 86 мм, общая длина корпуса 153,5 мм. Характеристики шагового двигателя J-8618HBR3401:
Момент на валу 8,0 Нм,
Длина корпуса 119,5 мм,
Ток фазы 6 А,
Индуктивность 7 мГн,
Сопроти. ..
..
Артикул: Art-282 Наличие Много
Шаговый двигатель J-8618HBR6401 с тормозом. Тип Nema 34 фланец 86 х 86 мм, общая длина корпуса 113,5 мм. Характеристики шагового двигателя J-8618HBR36401: Момент на валу 4,0 Нм, Длина корпуса 79,5 мм, Ток фазы 6 А, Индуктивность 15,2 мГн, …
Артикул: Art-268 Наличие Много
Шаговый двигатель
Дмитрий Левкин
Шаговый электродвигатель – это вращающийся электродвигатель с дискретными угловыми перемещениями ротора, осуществляемыми за счет импульсов сигнала управления [1].Предшественником шагового двигателя является серводвигатель.
Шаговые (импульсные) двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи.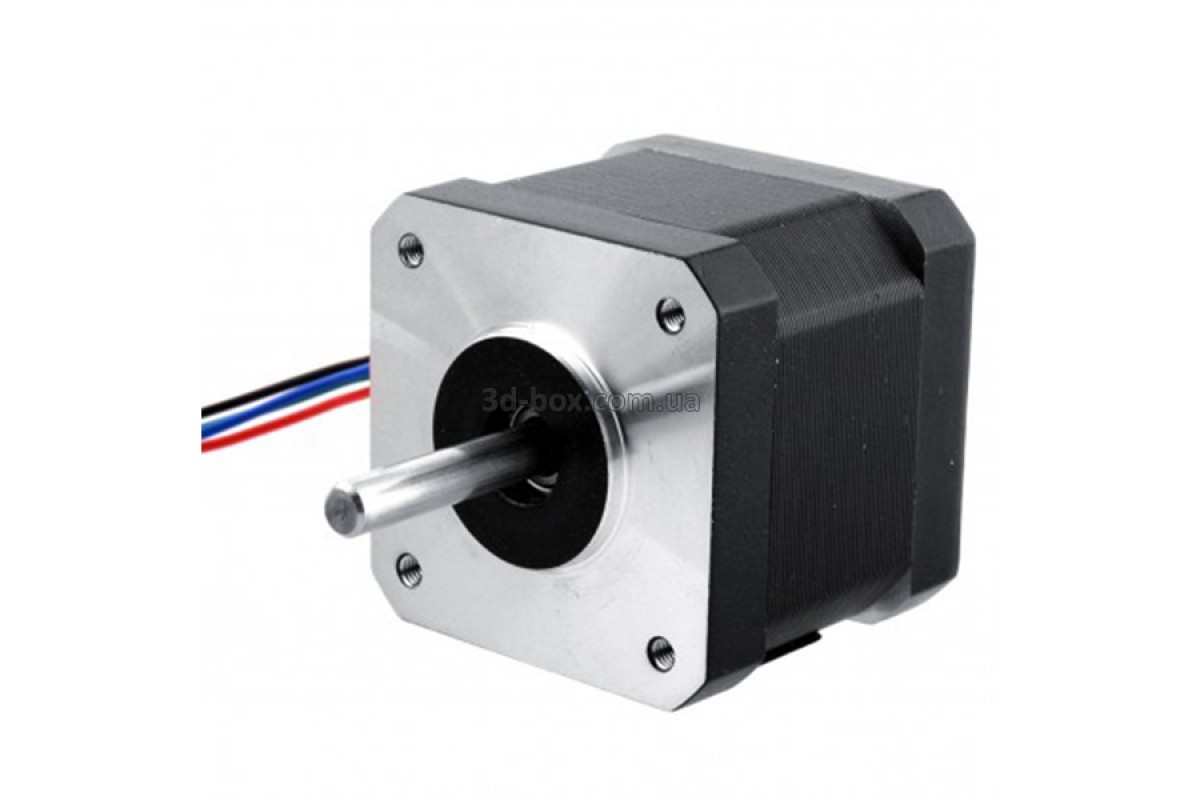 Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2].
Поэтому в задачах, где требуются высокие характеристики (точность, быстродействие) используются серводвигатели. В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
Шаговый двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор – неподвижная часть, ротор – вращающаяся часть.
Гибридный шаговый электродвигатель
Шаговые двигатели надежны и недороги, так как ротор не имеет контактных колец и коллектора. Ротор имеет либо явно выраженные полюса, либо тонкие зубья. Реактивный шаговый двигатель – имеет ротор из магнитомягкого материала с явно выраженными полюсами. Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Гибридный шаговый двигатель имеет составной ротор включающий полюсные наконечники (зубья) из магнитомягкого материала и постоянные магниты. Определить имеет ротор постоянные магниты или нет можно посредством вращения обесточенного двигателя, если при вращении имеется фиксирующий момент и/или пульсации значит ротор выполнен на постоянных магнитах.
Ротор имеет либо явно выраженные полюса, либо тонкие зубья. Реактивный шаговый двигатель – имеет ротор из магнитомягкого материала с явно выраженными полюсами. Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Гибридный шаговый двигатель имеет составной ротор включающий полюсные наконечники (зубья) из магнитомягкого материала и постоянные магниты. Определить имеет ротор постоянные магниты или нет можно посредством вращения обесточенного двигателя, если при вращении имеется фиксирующий момент и/или пульсации значит ротор выполнен на постоянных магнитах.
Статор шагового двигателя имеет сердечник с явно выраженными полюсами, который обычно делается из ламинированных штампованных листов электротехнической стали для уменьшения вихревых токов и уменьшения нагрева. Статор шагового двигателя обычно имеет от двух до пяти фаз.
Так как шаговый двигатель не предназначен для непрерывного вращения в его параметрах не указывают мощность. Шаговый двигатель – маломощный двигатель по сравнению с другими электродвигателями.
Одним из определяющих параметров шагового двигателя является шаг ротора, то есть угол поворота ротора, соответствующий одному импульсу. Шаговый двигатель делает один шаг в единицу времени в момент изменения импульсов управления. Величина шага зависит от конструкции двигателя: количества обмоток, полюсов и зубьев. В зависимости от конструкции двигателя величина шага может меняться в диапазоне от 90 до 0,75 градусов. С помощью системы управления можно еще добиться уменьшения шага пополам используя соответствующий метод управления.
Реактивный шаговый двигатель – синхронный реактивный двигатель. Статор реактивного шагового двигателя обычно имеет шесть явновыраженных полюсов и три фазы (по два полюса на фазу), ротор – четыре явно выраженных полюса, при такой конструкции двигателя шаг равен 30 градусам. В отличии от других шаговых двигателей выключенный реактивный шаговый двигатель не имеет фиксирующего (тормозящего) момента при вращении вала.
Трехфазный реактивный шаговый двигатель
(шаг 30°)
Четырехфазный реактивный шаговый двигатель
(шаг 15°)
Ниже представлены осциллограммы управления для трехфазного шагового двигателя.
Униполярное волновое управление
Биполярное полношаговое управление
Биполярное 6-шаговое управление
Осциллограммы управления для четырехфазного шагового двигателя показаны на рисунке ниже. Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
,
- где NR – количество полюсов ротора;
- NS – количество полюсов статора.
Осциллограммы управления 4-х фазным реактивным шаговым двигателем
Чтобы изменить направление вращения ротора (реверс) реактивного шагового двигателя, необходимо поменять схему коммутации обмоток статора, так как изменение полярности импульса не изменяет направления сил, действующих на невозбужденный ротор [2].
Реактивные шаговые двигатели применяются только тогда, когда требуется не очень большой момент и достаточно большого шага угла поворота. Такие двигатели сейчас редко применяются.
- Отличительные черты:
- ротор из магнитомягкого материала с явно выраженными полюсами;
- наименее сложный и самый дешевый шаговый двигатель;
- отсутствует фиксирующий момент в обесточенном состоянии;
- большой угол шага.
Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Статор обычно имеет две фазы.
По сравнению с реактивными, шаговые двигатели с активным ротором создают большие вращающие моменты, обеспечивают фиксацию ротора при снятии управляющего сигнала. Недостаток двигателей с активным ротором — большой угловой шаг (7,5—90°). Это объясняется технологическими трудностями изготовления ротора с постоянными магнитами при большом числе полюсов. Если угол фиксации находится в диапазоне от 7,5 до 90 градусов скорее всего это шаговый двигатель с постоянными магнитами нежели гибридный шаговый двигатель.
Обмотки могут иметь ответвление в центре для работы с однополярной схемой управления. Двухполярное управление требуется для питания обмоток без центрального ответвления.
Униполярный (однополярный) шаговый двигатель
Униполярный шаговый двигатель с постоянными магнитами имеет одну обмотку на фазу с ответвлением в центре. Каждая секция обмотки включается отдельно.
Таким образом расположение магнитных полюсов может быть изменено без изменения направления тока, а схема коммутации может быть выполнена очень просто (например на одном транзисторе) для каждой обмотки. Обычно центральное ответвление каждой фазы делается общим, в результате получается три вывода на фазу и всего шесть для обычного двухфазного двигателя.
Легкое управление однополярными двигателями сделало их популярными для любителей, они возможно являются наиболее дешевым способом чтобы получить точное угловое перемещение.
Схема униполярного двухфазного шагового двигателя
Схема биполярного двухфазного шагового двигателя
Биполярный шаговый двигатель
Двухполярные двигатели имеют одну обмотку на фазу. Для того чтобы изменить магнитную полярность полюсов необходимо изменить направление тока в обмотке, для этого схема управления должна быть более сложной, обычно с H-мостом. Биполярный шаговый двигатель имеет два вывода на фазу и не имеет общего вывода. Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Управление шаговым двигателем с постоянными магнитами
Для управления шаговым двигателем на постоянных магнитах к его обмоткам прикладывается сфазированный переменный ток. На практике это почти всегда прямоугольный сигнал сгенерированный от источника постоянного тока. Биполярная система управления генерирует прямоугольный сигнал изменяющийся от плюса к минусу, например от +2,5 В до -2,5 В. Униполярная система управления меняет направление магнитного потока катушки посредством двух сигналов, которые поочереди подаются на противоположные выводы катушки относительно ее центрального ответвления.
Волновое управление
Простейшим способом управления шаговым двигателем является волновое управление. При таком управлении в один момент времени возбуждается только одна обмотка. Но такой способ управления не обеспечивает максимально возможного момента.
Положение ротора шагового двигателя при волновом управлении
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора.
Волновое управление биполярным шаговым двигателем
На рисунке выше представлены схема биполярного шагового двигателя и двухполюсные осциллограммы управления. При таком управлении обе полярности (“+” и “-“) подаются на двигатель. Магнитное поле катушки поворачивается за счет того, что полярность токов управления меняется.
Волновое управление униполярным шаговым двигателем
На рисунке выше представлены схема униполярного шагового двигателя и однополюсные осциллограммы управления.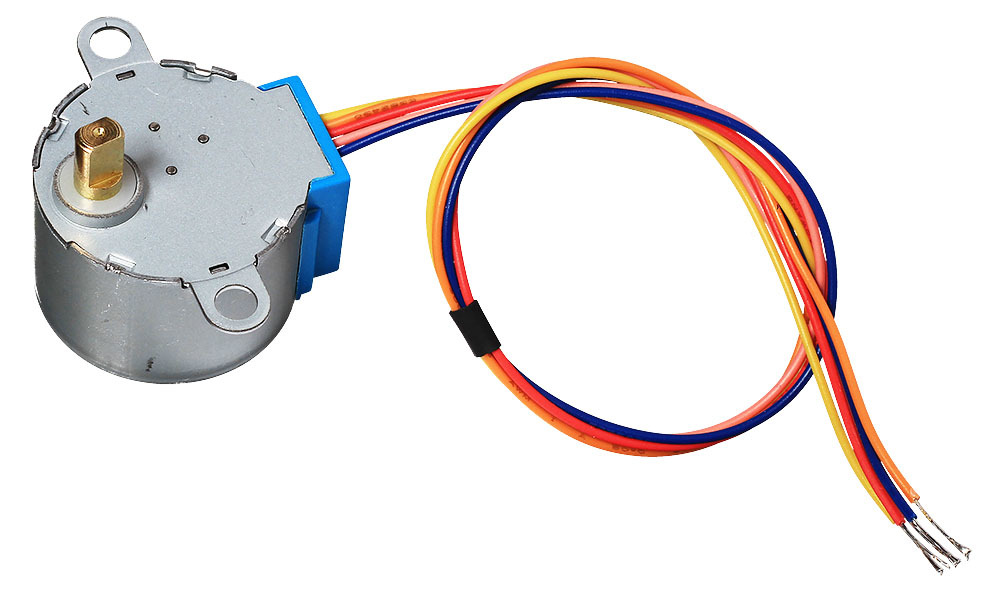 Так как для управления униполярным шаговым двигателем требуется только одна полярность это существенно упрощает схему системы управления. При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
Так как для управления униполярным шаговым двигателем требуется только одна полярность это существенно упрощает схему системы управления. При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
Необходимое для работы шагового двигателя переменное магнитное поле может быть создано как униполярным так и биполярным способом. Однако для униполярного управления катушки двигателя должны иметь центральное ответвление.
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора. Схемы соединения шагового двигателя показаны на рисунке ниже.
Схема 4 выводного биполярного шагового двигателя
Схема 5 выводного униполярного шагового двигателя
Схема 6 выводного униполярного шагового двигателя
Схема 8 выводного шагового двигателя
Шаговый двигатель с 4 выводами может управляться только биполярным способом. 6-выводной двигатель предназначен для управления униполярным способом, несмотря на то, что он также может управляться биполярным способом если игнорировать центральные выводы. 5-выводной двигатель может управляться только униполярным способом, так как общий центральный вывод соединяет обе фазы. 8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель. Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
6-выводной двигатель предназначен для управления униполярным способом, несмотря на то, что он также может управляться биполярным способом если игнорировать центральные выводы. 5-выводной двигатель может управляться только униполярным способом, так как общий центральный вывод соединяет обе фазы. 8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель. Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
- 8-выводные двигатели могут быть соединены в нескольких конфигурациях:
- униполярной;
- биполярной с последовательным соединением. Больше индуктивность, но ниже ток обмотки;
- биполярной с параллельным соединением. Больше ток, но ниже индуктивность;
- биполярной с одной обмоткой на фазу. Метод использует только половину обмоток двигателя при работе, что уменьшает доступный момент на низких оборотах, но требует меньше тока.
Полношаговое управление
Полношаговое управление обеспечивает больший момент, чем волновое управление так как обе обмотки двигателя включены одновременно. Положение ротора при полношаговом управлении показано на рисунке ниже.
Положение ротора шагового двигателя при полношаговом управлении
Полношаговое биполярное управление шаговым двигателем
Полношаговое биполярное управление показанное на рисунке выше имеет такой же шаг как и при волновом управлении. Униполярное управление (не показано) потребует два однополярных управляющих сигнала для каждого биполярного сигнала. Однополярное управление требует менее сложной и дорогой схемы управления. Дополнительная стоимость биполярного управления оправдана когда требуется более высокий момент.
Полушаговое управление
Шаг для данной геометрии шагового двигателя делится пополам. Полушаговое управление обеспечивает большее разрешение при позиционировании вала двигателя.
Положение ротора шагового двигателя при полушаговом управлении
Полушаговое управление – комбинация волнового управления и полношагового управления с питанием по очереди: сначала одной обмотки, затем с питанием обоих обмоток. При таком управлении количество шагов увеличивается в двое по сравнению с другими методами управления.
Полушаговое биполярное управление шаговым двигателем
Гибридный шаговый двигатель был создан с целью объединить лучшие свойства обоих шаговых двигателей: реактивного и с постоянными магнитами, что позволило добиться меньшего угла шага. Ротор гибридного шагового двигателя представляет из себя цилиндрический постоянный магнит, намагниченный вдоль продольной оси с радиальными зубьями из магнитомягкого материала.
Конструкция гибридного шагового двигателя (осевой разрез)
Статор обычно имеет две или четыре фазы распределенные между парами явно выраженных полюсов. Обмотки статора могут иметь центральное ответвление для униполярного управления. Обмотка с центральным ответвлением выполняется с помощью бифилярной намотки.
Обмотка с центральным ответвлением выполняется с помощью бифилярной намотки.
Гибридный шаговый двигатель (радиальный разрез)
Заметьте что 48 зубьев на одной секции ротора смещены на половину зубцового деления λ относительно другой секции (рисунок ниже). Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.
Ротор гибридного шагового двигателя
Зубья на полюсах статора соответствуют зубьям ротора, исключая отсутствующие зубья в пространстве между полюсами. Таким образом один полюс ротора, скажем южный полюс, можно выровнять со статором в 48 отдельных положениях. Однако зуб южного полюса ротора смещен относительно северного зуба на половину зубцового деления. Поэтому ротор может быть выставлен со статором в 96 отдельных положениях.
Соседние фазы статора гибридного шагового двигателя смещены друг относительно друга на одну четверть зубцового деления λ. В результате ротор перемещается с шагом в четверть зубцового деления во время переменного возбуждения фаз.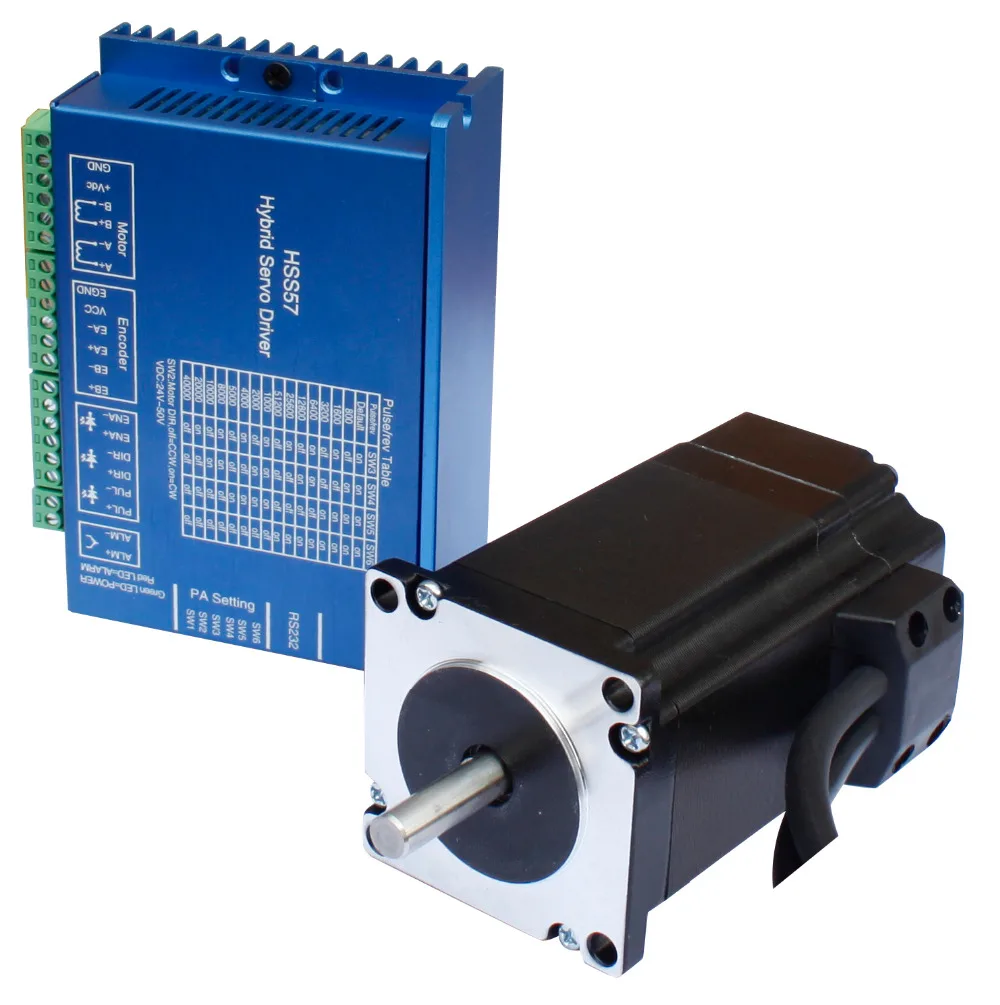 Другими словами для такого двигателя на один оборот приходится 2×96=192 шага.
Другими словами для такого двигателя на один оборот приходится 2×96=192 шага.
- Шаговый гибридный двигатель имеет:
- шаг меньше, чем у реактивного двигателя и двигателя с постоянными магнитами;
- ротор – постоянный магнит с тонкими зубьями. Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага;
- полюсы статора имеют такие же зубья как и ротор;
- статор имеет не менее чем две фазы;
- зубья соседних полюсов статора смещены на четверть зубцового деления для создания меньшего шага.
Приводы с шаговым двигателем и гидравлическим усилителем
Самая простая система управления получается при использовании силового шагового двигателя (СШД), однако с повышением выходной мощности СШД их динамические характеристики значительно ухудшаются это вызывает необходимость применения гидравлического усилителя мощности при средних и больших мощностях приводов. [c.119]
[c.119]Основные характеристики приводов с шаговым двигателем и гидравлическим усилителем мощности [c.186]
Шаговый двигатель используется для управления положением золотника 7, являющегося в рассматриваемой системе гидравлическим усилителем вращающего момента. При повороте золотника жидкость, нагнетаемая насосом, поступает в гидравлический ротационный двигатель плунжерного типа и приводит его в действие, заставляя перемещать салазки в требуемом направлении. [c.317]
Привод с растормаживанием основан на том, что под действием системы управления вспомогательное устройство в течение определенного времени пропускает движение от основного электрического, гидравлического или механического двигателя (рис. 210). Дискретное управление растормаживанием от шаговых двигателей дает возможность применять подобные приводы в станках с программным управлением. Тормозящие устройства нередко называют механическими усилителями мощности, имея в виду, что управлять приходится мощностью двигателя во много раз меньшей, чем мощность основного двигателя. Коэффициент усиления мощности
[c.245]
Коэффициент усиления мощности
[c.245]
В копировальных станках с программным управлением находят применение гидравлические усилители, которые позволяют незначительные силы (порядка Зн) ощупывающих механических систем и маломощных шаговых двигателей (порядка 150 Вт) увеличивать до величин, достаточных для перемещения рабочих органов станка. Усилительное гидравлическое устройство, сообщающее ведомому звену исполнительного механизма движения, согласованные с перемещением ведущего звена чувствительного элемента, называют гидравлическим усилителем или следящим приводом. Обладая высокой точностью согласованных движений, надежностью работы, быстродействием, малыми размерами, большим коэффициентом усиления. [c.290]
Привод состоит из шагового электродвигателя и гидравлического усилителя момента (рис. 19.И). Шаговый двигатель М отрабатывает импульсы, поступаюш,ие из системы ЧПУ. При обработке импульса вал 1, поворачиваясь, через редуктор 2 заставляет вращаться винт 3, ввернутый в гайку 4, жестко соединенную с ротором гидромотора 5. При неподвижном гидромоторе поворот винта переместит соединенный с ним запорно-регулирующий элемент 6, например, вправо от среднего положения, в результате чего в магистрали 7, идущей от направляющего гидрораспределителя к гидромотору, давление повысится, а в магистрали 8 понизится, и образовавшийся перепад давлений создаст крутящий момент на гидромоторе. Поворачиваясь, ротор гидромотора повернет гайку 4, которая через винт 3 возвратит запорно-регулирующий элемент в среднее положение. При непрерывной подаче импульсов на шаговый двигатель вал гидромотора будет вращаться со скоростью, пропорциональной частоте импульсов, а запорно-регулирующий элемент будет смещен из среднего положения на величину, обеспечивающую пропуск расхода масла, необходимого для вращения мотора.
[c.361]
При неподвижном гидромоторе поворот винта переместит соединенный с ним запорно-регулирующий элемент 6, например, вправо от среднего положения, в результате чего в магистрали 7, идущей от направляющего гидрораспределителя к гидромотору, давление повысится, а в магистрали 8 понизится, и образовавшийся перепад давлений создаст крутящий момент на гидромоторе. Поворачиваясь, ротор гидромотора повернет гайку 4, которая через винт 3 возвратит запорно-регулирующий элемент в среднее положение. При непрерывной подаче импульсов на шаговый двигатель вал гидромотора будет вращаться со скоростью, пропорциональной частоте импульсов, а запорно-регулирующий элемент будет смещен из среднего положения на величину, обеспечивающую пропуск расхода масла, необходимого для вращения мотора.
[c.361]
В этом случае шаговые двигатели управляют лишь поворотами крановых золотников гидравлических усилителей, которые приводят во вращение ходовые винты, перемещающие продольные и поперечные салазки и шпиндельную головку станка.
 [c.263]
[c.263]В электрических приводах кроме асинхронных применяют и другие типы электродвигателей. В ПР это прежде всего дискретный (шаговый) привод, имеющий две разновидности привод с управляющим шаговым двигателем (ШД) и промежуточным усилителем момента, выполненным в виде следящей гидравлической системы привод с силовым шаговым двигателем. Применяют следящие приводы на- базе электродвигателей [c.196]
Различают два типа приводов подачи дискретные (шаговые) и следящие (непрерывные). В свою очередь приводы подач дискретного типа делятся на две группы 1) приводы с силовым шаговым двигателем (ЩД), соединенным через кинематическую цепь с исполнительным механизмом 2) приводы с управляющим ЩД (играющим роль задатчика угла поворота) и усилителем крутящего момента, выполненным в виде автономной следящей системы, обычно гидравлической. [c.277]
В этом случае управляющим сигналом служит серия импульсов, частота которых является мерой выходной скорости, а число соответствует требуемой конечной позиции.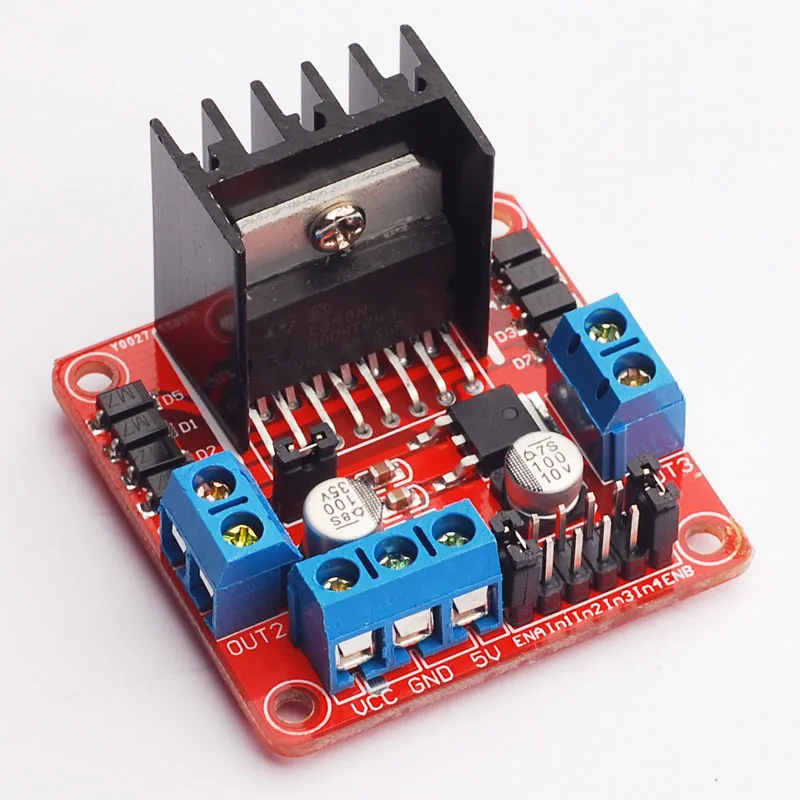 В специальном блоке электронного коммутатора ЭК эта последовательность импульсов преобразуется в многофазную систему токов, служащую для управления шаговым двигателем ШД. Для получения большей мощности между шаговым двигателем и исполнительным органом ИО вводят гидравлический усилитель воздействия ГУ. Принципиальным звеном, осуществляющим слежение, является шаговый двигатель, определяющий и статическую ошибку и быстродействие привода.
[c.23]
В специальном блоке электронного коммутатора ЭК эта последовательность импульсов преобразуется в многофазную систему токов, служащую для управления шаговым двигателем ШД. Для получения большей мощности между шаговым двигателем и исполнительным органом ИО вводят гидравлический усилитель воздействия ГУ. Принципиальным звеном, осуществляющим слежение, является шаговый двигатель, определяющий и статическую ошибку и быстродействие привода.
[c.23]
В позиционных и контурных СЧПУ чаще всего встречаются два типа приводов. Первым и наиболее простейшим вариантом исполнительного позиционного привода подач является электрический шаговой привод. Шаговые приводы используют несиловые и силовые шаговые двигатели. При применении несилового шагового двигателя в состав привода входит гидравлический усилитель крутящего момента. Выходной вал силового шагового двигателя непосредственно соединяется с ходовым винтом или редуктором механизма подачи. [c.322]
Совокупность вариантов приводов подач рабочих органов станков и роботов с ЧПУ представим в виде обобщенной схемы (рис. 81). Основу каждого привода составляет исполнительный механизм, включающий исполнительный двигатель ИД и редуктор Р. Имеется отрицательная связь по нагрузке Я. Контур, имеющий исполнительный механизм и усилитель мощности УМ, называют силовой частью привода или силовым приводом. Некоторые гидравлические приводы подач строят на основе силового привода, охваченного жесткой обратной связью ЖОС, и золотникового шагового задатчика. Если в приводе не используется ЖОС, то обычно формируется скоростной контур, где датчиком скорости является тахогенератор. Основным контуром привода
[c.124]
С гидравлическими усилителями крутящих моментов. Шаговые двигатели вращают лишь краны золотников гидроусилителей, “необходимый же для перемещения крутящий момент создается гидравлическими двигателями. Схема гидравлической системы станка приведена на рис. 135. Она работает от лопастного насоса, который рассчитан на давление 50 кгс/см. В приводе вертикального перемещения пиноли шпинделя управляющий золотник И отделен от гидродвигателя 10.YLBS,cgMWvK!~~60_57.JPG) Это сделано для того, чтобы уменьшить общую высоту станка. Кинематически они соединены зубчатой пёредачей 12 с регулируемым боковым зазором между зубьями.
[c.215]
Это сделано для того, чтобы уменьшить общую высоту станка. Кинематически они соединены зубчатой пёредачей 12 с регулируемым боковым зазором между зубьями.
[c.215]
В случае применения шагового двигателя привод может быть выполнен на основе а) силового шагового двигателя, который через безлюфтовый редуктор и шариковую винтовую пару перемещает стол станка б) маломощного шагового двигателя с гидравлическим усилителем мощности. [c.122]
Принципиальная схема привода, состоящего из шагового электродвигателя и гидравлического усилителя момента, показана на рис. 294. Шаговый двигатель ШД отрабатывает импульсы, поступающие из системы ЧПУ. При обработке импульса вал /, поворачиваясь, через редуктор 2 заставляет вращаться винт 3, ввернутый в гайку 4, жестко соединенную с ротором гидромотора 5. При неподвижном гидромоторе поворот винта переместит соединенный с ним запорно-регулирующий элемент 6, например, вправо от среднего положения, в результате чего в магистрали 7, идущей от направляющего гидрораспределителя к гидромотору, повысится, а в магистрали 8 понизится давление, и образовавшийся перепад давлений создаст кpyтяш й момент на гидромоторе. Поворачиваясь, ротор гидромотора повернет гайку 4, которая [c.367]
Основным элементом электрогидравлического шагового привода является гидравлический усилитель 5, представляющий собой ак-сиальио-порпиювой гидромотор со следящим управлением. Гидромотор управляется следящим золотником 10 осевого типа, который приводится в движение от шагового двигателя 13. Выходной конец вала гидромотора черёз безлюфтовую понижающую зубчатую пере- [c.111]
На рис. 7, а представлена схема делительного механизма с электро-гидравлическим приводом. В данном случае для выполнения прерывистого периодического углового поворота используется шаговый электродвигатель /, работающий совместно с гидравлическим аксиально-порщневым двигателем 2. Гидравлический двигатель служит в качестве усилителя момента вращения, передаваемого червячному делительному колесу 4 от червяка 3. В шаговых электродвигателях цепь питания включается периодически, и при каждом включении ротор поворачивается на определенный, точно установленный угол. Если единичный угол поворота при одном включении равен а, то минимальный угол поворота червячного колеса будет равен [c.13]
Драйвер шагового двигателя
| Дешевый лучший драйвер шагового двигателя оптом …
Что такое драйвер шагового двигателя?
Драйвер шагового двигателя – это привод, который может преобразовывать импульсный сигнал в сигнал углового смещения. Драйверы шагового двигателя приводят в действие шаговые двигатели для вращения на угол, называемый углом шага, в заданном направлении при получении импульсного сигнала. Скорость двигателя соответствует частоте импульсов, заданной контроллером, а смещение определяется количеством импульсов, подаваемым контроллером.Шаговая система состоит из шагового двигателя и шагового драйвера. Производительность шаговой системы зависит не только от двигателя, но и от шагового драйвера.
Типы драйверов шагового двигателя
STEPPERONLINE предлагает три типа драйверов шаговых двигателей:
Цифровой шаговый драйвер
Цифровой шаговый драйвер разработан с использованием усовершенствованного алгоритма управления DSP, основанного на новейшей технологии управления движением. Это идеальный выбор для решений с шаговыми двигателями.Его высокое качество, высокая производительность и долгий срок службы впечатляют многих клиентов.
Подробнее ►
Драйвер шагового двигателя с замкнутым контуром
Шаговые драйверы с обратной связью работают с шаговыми двигателями с обратной связью с энкодером для получения сигнала положения. Он обеспечивает более высокие диапазоны пикового крутящего момента на высокой скорости и большую производительность машины, а также более тихую работу и меньшее энергопотребление.
Подробнее ►
Интегрированный шаговый драйвер
Интегрированные шаговые драйверы – драйверы, которые могут быть установлены на шаговых двигателях.Самым большим преимуществом встроенного шагового двигателя является пространство и большая надежность. В настоящее время STEPPERONLINE предлагает три типа интегрированных шаговых двигателей:
b. Шаговый двигатель + шаговый драйвер + контроллер
c. Шаговый двигатель + шаговый драйвер + кодировщик
STEPPERONLINE всегда предлагает драйверы шагового двигателя лучшего качества по лучшей цене. Если у вас есть какие-либо вопросы о том, как выбрать подходящий драйвер шагового двигателя, свяжитесь с нами.Мы всегда готовы дать вам наиболее подходящую рекомендацию.
Сортировать по: DefaultName (A – Z) Имя (Z – A) Цена (Низкая> Высокая) Цена (Высокая> Низкая) Рейтинг (Наивысший) Рейтинг (Наименьший) Модель (A – Z) Модель (Z – A)
Показывать: 20255075100
-22%
Артикул: DM320T 17,00 долл. 13,30 долл. США Начиная с: 12,70 $
-21%
Артикул: DM332TЭто цифровой шаговый привод с передовой технологией управления шаговым двигателем.Он прост в использовании и может использоваться для плавного управления 2-фазными и 4-фазными двигателями (от Nema 17-Nema 23) с меньшим нагревом и шумом. Оно работает ..
$ 19,50 $ 15,50 Начиная с: 14,82 $
В основном используется в медицинском оборудовании, дозирующих машинах, гравировальных станках, лазерном оборудовании, этикетировочных машинах, электронном оборудовании, рекламном оборудовании и другом оборудовании для автоматизации. Особенно эффективен при применении.
16 долларов.24 Начиная с: 14,33 $
-20%
Артикул: DM542T 25,00 долл. 19,90 долл. США Начиная с: 19,05 $
В основном используется в медицинском оборудовании, дозирующих машинах, гравировальных станках, лазерном оборудовании, этикетировочных машинах, электронном оборудовании, рекламном оборудовании и другом оборудовании для автоматизации. Особенно эффективен при применении.
24,36 $ Начиная с: 21,50 $
-21%
Артикул: DM556T 28 долларов.00 22,05 долл. США Начиная с: 21,18 $
-20%
Артикул: DM860I 40,50 долл. США 32,31 долл. США Начиная с: 30,92 $
В основном используется в медицинском оборудовании, дозирующих машинах, гравировальных станках, лазерном оборудовании, этикетировочных машинах, электронном оборудовании, рекламном оборудовании и другом оборудовании для автоматизации. Особенно эффективен при применении.
27,07 долл. США Начиная с: 23,88 $
-20%
Артикул: DM860T $ 46.50 $ 37,40 Начиная с: 35,79 $
В основном используется в медицинском оборудовании, дозирующих машинах, гравировальных станках, лазерном оборудовании, этикетировочных машинах, электронном оборудовании, рекламном оборудовании и другом оборудовании для автоматизации. Особенно эффективен при применении.
40,60 долл. США Начиная с: 35,83 $
Артикул: CL57T43,31 $ Начиная с: 38,22 $
Артикул: CL86T56,85 долл. США От 50 долларов.16
Артикул: ISD02ISD02 – это серия миниатюрных высокопроизводительных драйверов шагового двигателя с параллельным портом управления, главной особенностью которой является небольшой размер и высокая управляемость. Его толщина менее 14 мм. Их можно установить прямо на ..
25,48 долл. США Начиная с: 21,50 $
Артикул: ISD04ISD04 представляет собой серию миниатюрных высокопроизводительных драйверов шаговых двигателей с параллельным портом управления. Самая большая их особенность – небольшой размер и высокая управляемость.Их толщина менее 14 мм. Их можно устанавливать непосредственно на NE ..
40,76 долл. США Начиная с: 34,39 $
Артикул: ISD08ISD08 – это серия миниатюрных высокопроизводительных драйверов шагового двигателя с параллельным портом управления. Самая большая его особенность – небольшой размер и отличная управляемость. Его толщина менее 14 мм. Их можно установить прямо на ..
56,05 долл. США Начиная с: 47,29 $
-24%
Артикул: ISC02ISC02 – это встроенный микропроцессор, регулятор напряжения, миниатюрный контроллер шагового двигателя.Он полностью разработан для установки на шаговые двигатели и прост в управлении. С ISC02 скорость двигателя можно контролировать с помощью аналогового ..
26,26 долл. США 19,99 долл. США Начиная с: 19,99 $
ISC02 – это встроенный микропроцессор, регулятор напряжения, миниатюрный контроллер шагового двигателя. Он полностью разработан для установки на шаговые двигатели и прост в управлении. С ISC02 скорость двигателя можно контролировать с помощью аналогового ..
27 долларов.07 Начиная с: 23,09 $
Артикул: ISC04ISC04 – это встроенный микропроцессор, регулятор напряжения, миниатюрный контроллер шагового двигателя. Он полностью разработан для установки на шаговые двигатели и прост в управлении. С ISC04 скорость двигателя можно контролировать с помощью аналогового ..
40,60 долл. США Начиная с: 34,63 $
Артикул: ISC08ISC08 – это встроенный микропроцессор, регулятор напряжения, миниатюрный контроллер шагового двигателя. Он полностью разработан для установки на шаговые двигатели и прост в управлении.С ISC08 скорость двигателя можно контролировать с помощью аналого ..
59,55 долл. США Начиная с: 50,79 $
Шаговые двигатели, драйверы шаговых двигателей, контроллеры шаговых двигателей и шаговые двигатели с регулировкой скорости
Шаговые двигателис легкостью обеспечивают точное позиционирование. Они используются в различных типах оборудования для точного контроля угла поворота и скорости с помощью импульсных сигналов. Шаговые двигатели генерируют высокий крутящий момент с компактным корпусом и идеально подходят для быстрого ускорения и реакции.Шаговые двигатели также сохраняют свое положение при остановке благодаря своей механической конструкции. Решения с шаговыми двигателями состоят из драйвера (принимает импульсные сигналы и преобразует их в движение двигателя) и шагового двигателя.
Oriental Motor предлагает множество решений для широкого спектра применений:
- Шаговые двигатели AlphaStep с замкнутым контуром, 2-фазные шаговые двигатели, 5-фазные шаговые двигатели
- Опции редуктора, энкодера и электромагнитного тормоза
- Драйверы шаговых двигателей переменного или постоянного тока
- Размеры рамы от 0.От 79 дюймов (20 мм) до 3,54 дюйма (90 мм)
Подробнее …
Шаговые двигатели (только двигатели)
Oriental Motor предлагает широкий спектр шаговых двигателей, включая; Шаговые двигатели AlphaStep с обратной связью, 2-фазные шаговые двигатели и 5-фазные шаговые двигатели доступны в размерах от 0,79 дюйма (20 мм) до 3,54 дюйма (90 мм). Предлагаются пять вариантов шаговых двигателей редукторного типа, опции энкодера и тормоза, а также различные обмотки двигателя.
- 0.79 ~ 3,54 дюйма (20 ~ 90 мм) Шаговые двигатели NEMA 8 ~ NEMA 34 типоразмера
- Доступны шестерни без люфта, с низким люфтом и прямозубые шестерни
- Шаговые двигатели с замкнутым контуром AlphaStep, 2-фазные шаговые двигатели и 5-фазные шаговые двигатели
- Опции энкодера и электромагнитного тормоза
Драйверы шагового двигателя
Драйверы шагового двигателя преобразуют импульсные сигналы от контроллера в движение двигателя для достижения точного позиционирования.
- Вход переменного или постоянного тока
- Драйверы шаговых двигателей AlphaStep с замкнутым контуром, 2-фазных шаговых двигателей или 5-фазных шаговых двигателей
- Импульсный вход, встроенный контроллер или версии, совместимые с EtherNet / IP ™ и EtherCAT
- Тип платы или коробки
EtherNet / IP ™ является товарным знаком ODVA
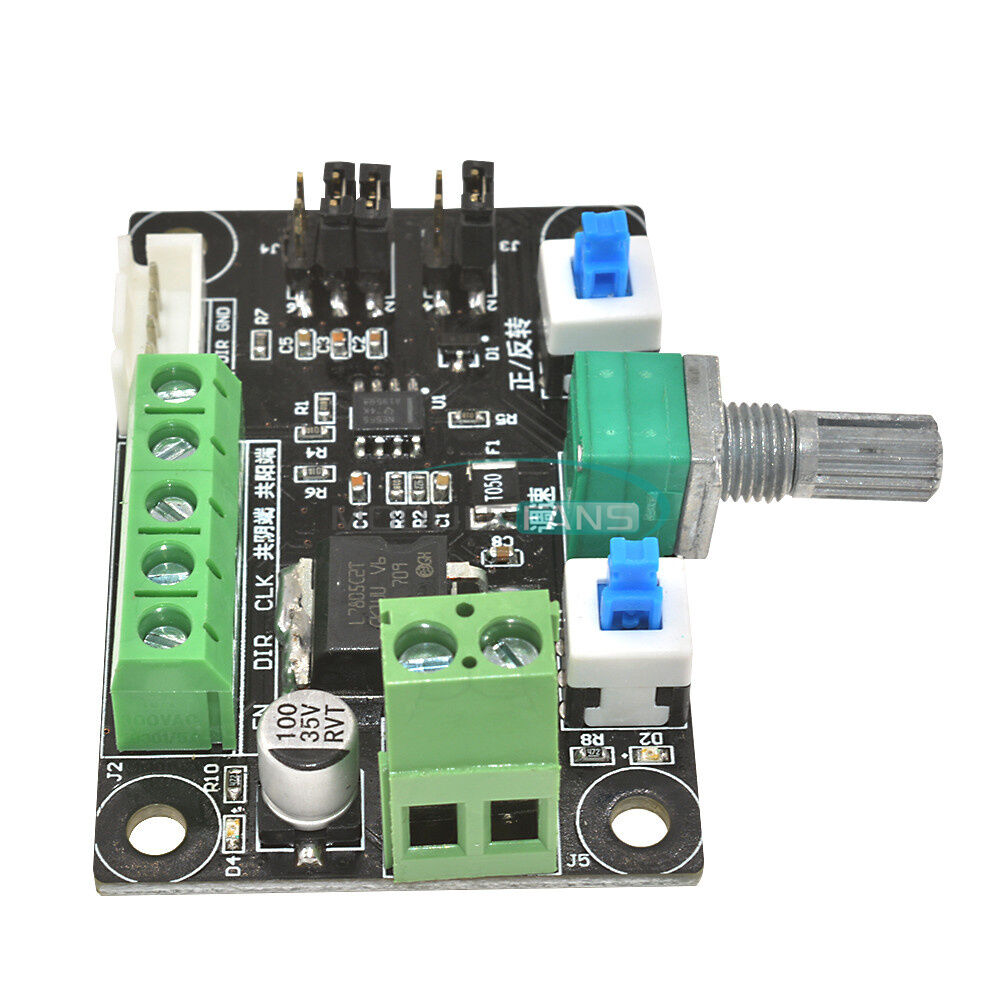
Шаговые двигатели и драйверы с регулировкой скорости
Система управления скоростью SC серии CVK предлагает простую конфигурацию, состоящую из шагового двигателя, драйвера и программируемого контроллера.Рабочую скорость, время ускорения и замедления, рабочий ток можно установить с помощью переключателей привода, а простое переключение входа FWD (RVS) в положение ON или OFF позволяет легко управлять.
- Генератор импульсов не требуется
- Возможны 2 настройки скорости
- Компактный шаговый двигатель с высоким крутящим моментом
Контроллеры / Сетевые шлюзы
Контроллерыи сетевые шлюзы для использования с системами управления движением.
- Контроллеры для использования с драйверами импульсного входа
- Сетевые преобразователи / шлюзы (связь RS-485)
- EtherCat
- CC-Link
- MECHATROLINK
Шаговые двигатели и драйверы
Шаговый двигатель используется для достижения точного позиционирования с помощью цифрового управления.Двигатель работает за счет точной синхронизации с выходным импульсным сигналом от контроллера к драйверу. Шаговые двигатели, с их способностью создавать высокий крутящий момент на низкой скорости при минимальной вибрации, идеально подходят для приложений, требующих быстрого позиционирования на короткое расстояние.
Точное позиционирование с точностью до шага
Шаговый двигатель вращается с фиксированным углом шага, как секундная стрелка часов. Этот угол называется «углом основного шага». Oriental Motor предлагает шаговые двигатели с базовым углом шага 0.36 °, 0,72 °, 0,9 ° и 1,8 °. 5-фазные шаговые двигатели имеют угол поворота 0,36 ° и 0,72 °, а 2-фазные шаговые двигатели – 0,9 ° и 1,8 °.
Использование технологии гибридных шаговых двигателей
Гибридный шаговый двигатель представляет собой комбинацию двигателей с переменным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного шагового двигателя намагничен в осевом направлении, как шаговый двигатель с постоянным магнитом, а на статор подается электромагнитное питание, как у шагового двигателя с переменным магнитным сопротивлением.И статор, и ротор имеют несколько зубьев.
Гибридный шаговый двигатель имеет намагниченный в осевом направлении ротор, что означает, что один конец намагничен как северный полюс, а другой конец – как южный полюс. Чашки зубчатого ротора размещены на каждом конце магнита, и чашки смещены на половину шага зубьев.
Простое управление с помощью импульсных сигналов
Конфигурация системы для высокоточного позиционирования показана ниже. Угол поворота и скорость шагового двигателя можно контролировать с высокой точностью с помощью импульсных сигналов от контроллера.
Что такое импульсный сигнал?
Импульсный сигнал – это электрический сигнал, уровень напряжения которого многократно меняется между ВКЛ и ВЫКЛ. Каждый цикл включения / выключения считается одним импульсом. Команда с одним импульсом заставляет выходной вал двигателя поворачиваться на один шаг. Уровни сигнала, соответствующие состояниям включения и выключения напряжения, обозначаются как «H» и «L» соответственно.
Величина вращения пропорциональна количеству импульсов
Величина вращения шагового двигателя пропорциональна количеству импульсных сигналов (количеству импульсов), подаваемых драйверу.Соотношение вращения шагового двигателя (угла поворота выходного вала двигателя) и количества импульсов выражается следующим образом:
Скорость пропорциональна скорости импульса
Скорость шагового двигателя пропорциональна скорости импульсных сигналов (частоты импульсов), подаваемых водителю. Соотношение скорости импульса [Гц] и скорости двигателя [об / мин] выражается следующим образом:
Создание высокого крутящего момента с помощью компактного корпуса
Шаговые двигателив компактном корпусе создают высокий крутящий момент.Эти характеристики обеспечивают им отличное ускорение и реакцию, что, в свою очередь, делает эти двигатели хорошо подходящими для приложений с высокими требованиями к крутящему моменту, когда двигатель должен часто запускаться и останавливаться. Чтобы удовлетворить потребность в увеличении крутящего момента на низкой скорости, Oriental Motor также предлагает мотор-редукторы, сочетающие компактную конструкцию и высокий крутящий момент.
Двигатель удерживается в остановленном положении
Шаговые двигатели продолжают создавать удерживающий момент даже в состоянии покоя.Это означает, что двигатель можно удерживать в остановленном положении без использования механического тормоза.
При отключении питания самоудерживающийся момент двигателя теряется, и двигатель больше не может удерживаться в остановленном положении при вертикальных операциях или при приложении внешней силы. В подъемниках и подобных устройствах используйте тормоз электромагнитного типа.
Шаговые двигатели с замкнутым контуром и драйверы – AlphaStep
AlphaStep состоит из шагового двигателя и драйверов, разработанных для раскрытия максимальных характеристик шагового двигателя.Эти изделия обычно работают синхронно с импульсными командами, но когда происходит внезапное ускорение или изменение нагрузки, уникальный режим управления поддерживает операцию позиционирования. Модели AlphaStep также могут выводить сигналы завершения позиционирования и аварийные сигналы, что повышает надежность оборудования, с которым они работают.
Типы операционных систем
Каждый шаговый двигатель и драйвер объединяют в себе шаговый двигатель, выбранный из различных типов, со специальным драйвером.Доступны драйверы, работающие в режиме импульсного ввода и в режиме встроенного контроллера. Вы можете выбрать желаемую комбинацию в соответствии с требуемой операционной системой.
Драйвер импульсного входа
Двигателем можно управлять с помощью генератора импульсов, предоставленного пользователем. Рабочие данные заранее вводятся в генератор импульсов. Затем пользователь выбирает рабочие данные на главном программируемом контроллере, затем вводит операционную команду.
Драйвер встроенного контроллера
Встроенная функция генерации импульсов позволяет управлять двигателем через подключенный напрямую персональный компьютер или программируемый контроллер.Поскольку отдельный генератор импульсов не требуется, драйверы этого типа экономят место и упрощают электромонтаж.
Разница между характеристиками входа переменного и постоянного тока
Шаговый двигатель приводится в действие напряжением постоянного тока, подаваемым через драйвер. В двигателях и драйверах Oriental Motor с входным напряжением 24 В постоянного тока на двигатель подается 24 В постоянного тока. В двигателях и драйверах на 100-115 В переменного тока на входе выпрямляется постоянный ток, а затем на двигатель подается примерно 140 В постоянного тока (исключение составляют некоторые изделия.)
Эта разница в напряжении, подаваемом на двигатели, проявляется как разница в характеристиках крутящего момента на высоких скоростях. Это связано с тем, что чем выше приложенное напряжение, тем быстрее будет нарастание тока через обмотки двигателя, что облегчает приложение номинального тока на более высоких скоростях. Таким образом, входной двигатель переменного тока и система привода имеют превосходные характеристики крутящего момента в широком диапазоне скоростей, от низких до высоких, обеспечивая большое передаточное отношение.
Рекомендуется, чтобы для вашего приложения были рассмотрены системы двигателя и привода переменного тока, которые совместимы в более широком диапазоне рабочих условий, чем системы ввода постоянного тока.
Драйверы шаговых двигателей – Драйверы шаговых двигателей переменного и постоянного тока
Драйверы шаговых двигателей переменного тока
Драйверы шаговых двигателей с входом переменного токаобеспечивают превосходные характеристики крутящего момента в широком диапазоне скоростей, от низких до высоких, обеспечивая большое передаточное отношение. Поддерживает управление по замкнутому контуру без настройки усиления или проблем с поиском при использовании с двигателем AlphaStep AZ Series (абсолютный механический энкодер) или двигателем AlphaStep AR Series (встроенный резольвер) для превосходного управления.Серия RKII (разомкнутый контур) идеально подходит для требовательных приложений, где обратная связь не требуется.
Все драйверы шаговых двигателей с входом переменного тока оснащены опережающим микрошаговым управлением Oriental Motor (Smooth Drive). Эти драйверы доступны с импульсным входом или с сохраненными данными (сеть) через нашу группу продуктов FLEX и предлагают управление электромагнитным тормозом для вертикальных операций.
Используйте драйверы AlphaStep Closed Loop на всех наших продуктах на основе приводов в качестве общей платформы для упрощения электромонтажа, повышения производительности машины и сетевого взаимодействия.
- Импульсный вход, импульсный вход со связью RS-485, сохраненные данные (сеть), типы, совместимые с EtherNet / IP ™ или EtherCAT
- Однофазный или трехфазный вход
- Замкнутый контур или Открытый контур
EtherNet / IP ™ является товарным знаком ODVA
Драйверы шаговых двигателей с входом постоянного тока
Доступные для широкого диапазона напряжений постоянного тока, наши драйверы шаговых двигателей постоянного тока доступны с теми же функциями, что и наши популярные драйверы входа переменного тока.
Кроме того, мы предлагаем драйверы ввода постоянного тока, специально разработанные для OEM-приложений. Плата CVD – это превосходный микрошаговый драйвер, обеспечивающий лучшую в отрасли характеристику крутящего момента, высокую точность даже при микрошагах и сверхнизкие характеристики вибрации с помощью усовершенствованной функции микрошага (плавного движения). Доступен в 2-фазном или 5-фазном исполнении.
Используйте драйверы замкнутого контура на всех наших продуктах на основе приводов в качестве общей платформы для упрощения проводки, повышения производительности машины и сетевого взаимодействия.
- OEM (тип платы / карты) или тип коробки
- Импульсный вход, импульсный вход со связью RS-485, сохраненные данные с связью RS-485, EtherNet / IP ™, совместимые с EtherCAT типы или многоосевые * типы
- AlphaStep Closed Loop, 2-фазные и 5-фазные шаговые двигатели
- Вход 24 В, 48 или 75 В постоянного тока
*
Типы драйверов шаговых двигателей
Доступны драйверы, работающие в режиме импульсного входа и в режиме встроенного контроллера.Вы можете выбрать желаемую комбинацию в соответствии с требуемой операционной системой.
Драйверы импульсного входа
Шаговым двигателем можно управлять с помощью генератора импульсов, предоставленного пользователем. Рабочие данные заранее вводятся в генератор импульсов. Затем пользователь выбирает рабочие данные на главном программируемом контроллере, затем вводит операционную команду.
Встроенный контроллер (хранимые данные или хранимая программа) Драйверы типа
Встроенная функция генерации импульсов позволяет управлять двигателем через подключенный напрямую персональный компьютер или программируемый контроллер.Поскольку отдельный генератор импульсов не требуется, драйверы этого типа экономят место и упрощают электромонтаж.
Разница между характеристиками входа переменного и постоянного тока
Шаговый двигатель приводится в действие напряжением постоянного тока, подаваемым через драйвер. В двигателях и драйверах Oriental Motor с входным напряжением 24 В постоянного тока на двигатель подается 24 В постоянного тока. В двигателях и драйверах на 100-115 В переменного тока на входе выпрямляется постоянный ток, а затем на двигатель подается примерно 140 В постоянного тока (исключение составляют некоторые изделия.)
Эта разница в напряжении, подаваемом на двигатели, проявляется как разница в характеристиках крутящего момента на высоких скоростях. Это связано с тем, что чем выше приложенное напряжение, тем быстрее будет нарастание тока через обмотки двигателя, что облегчает приложение номинального тока на более высоких скоростях. Таким образом, входной двигатель переменного тока и система привода имеют превосходные характеристики крутящего момента в широком диапазоне скоростей, от низких до высоких, обеспечивая большое передаточное отношение.
Рекомендуется, чтобы для вашего приложения были рассмотрены системы двигателя и привода переменного тока, которые совместимы в более широком диапазоне рабочих условий, чем системы ввода постоянного тока.
Шаговые двигатели Сравнение продуктов
Серия продуктов | Серия AZ Абсолютные шаговые двигатели с замкнутым контуром | Серия AR Шаговые двигатели с замкнутым контуром | 2-фазные биполярные шаговые двигатели серии PKP | Двухфазные униполярные шаговые двигатели серии ПКП | 5-фазные шаговые двигатели серии RKII | 5-фазные шаговые двигатели серии ПКП |
Характеристики | Замкнутый контур, | Замкнутый контур, | High Torque, | High Torque, | Высокоэффективный | High Torque, |
Угол основного шага | 0.36 ° | 0,36 ° | 1,8 °, 0,9 ° | 1,8 °, 0,9 ° | 0,72 ° | 0,72 °, 0,36 ° |
Требуется драйвер | AZ Серия | Серия AR | Биполярная серия CVD | CMD серии униполярный | Серия РКИИ | Серия CVD, 5 фаз |
Вход питания драйвера | переменного или постоянного тока | переменного или постоянного тока | постоянного тока | постоянного тока | AC | постоянного тока |
Размеры рамы | 0.79 дюймов (20 мм) | 1,10 дюйма (28 мм) | 0,79 дюйма (20 мм) | 0.79 дюймов (20 мм) | 1,65 дюйма (42 мм) | 1,10 дюйма (28 мм) |
Доступные опции | Редукторный тип | Тип редуктора | Редукторный тип | Редукторный тип | Редукторный тип | Редукторный тип |
Макс.Удерживающий момент | 2,8 унции на дюйм до 752 фунта дюйм | 42 унции до 442 фунтов | 2,8 унции на дюйм до 1062 фунта дюйм | 2,8 унции до 64 фунтов | 19,8 унций на дюйм до 460 фунтов на дюйм | 7,3 унции до 53 фунтов |
0,02 Н · м до 85 Н · м | 0.От 3 Н · м до 50 Н · м | 0,02 Н · м до 120 Н · м | от 0,02 Н · м до 7,3 Н · м | 0,14 Н · м до 52 Н · м | 0,052 Н · м до 6 Н · м | |
Подробнее | Серия AZ Абсолютные шаговые двигатели с замкнутым контуром | AR Шаговые двигатели с замкнутым контуром серии | 2-фазные биполярные шаговые двигатели серии PKP | Двухфазные униполярные шаговые двигатели серии ПКП | 5-фазные шаговые двигатели серии RKII | 5-фазные шаговые двигатели серии ПКП |
Руководство по выбору приводов шаговых двигателей: типы, характеристики, применение
Приводы шаговых двигателей – это устройства, используемые для питания и управления шаговыми двигателями.В то время как некоторые базовые приводы только обеспечивают питание, многие имеющиеся в продаже приводы также включают электронику контроллера в полный комплект. Эта электроника включает в себя логический секвенсор, переключающие компоненты и источник тактовых импульсов для определения скорости шага.
Типы приводов
Приводыс шаговыми двигателями в первую очередь отличаются тремя отдельными свойствами: расположением обмоток двигателя, схемой привода и пошаговым режимом. Тип драйвера имеет большое влияние на общую производительность системы шагового двигателя, в частности, на его крутящий момент, выходную мощность и скорость.Различие между различными типами важно для определения того, какой драйвер лучше всего подходит для приложения.
Обмотка
В двухфазных шаговых двигателях используются две основные схемы обмоток. Приводы с шаговыми двигателями можно классифицировать по конструкции, для которой они предназначены.
Режим привода | Количество проводов (выводов) | Основные характеристики |
Униполярный | 5, 6 или 8 | Недорогой, прочный, простой, лучший на низких скоростях |
Биполярная серия | 4, 6 или 8 | Высокий крутящий момент на низкой скорости, низкий крутящий момент на высокой скорости |
Биполярный параллельный | 4 или 8 | Более плоский профиль крутящий момент-скорость, более высокий крутящий момент на высокой скорости |
Униполярные приводы предназначены для униполярных двигателей, которые представляют собой двигатели с 6 выводами (катушки с центральным отводом).Вместо того, чтобы реверсировать ток в каждой фазе, привод просто переключает ток с одной катушки на другую в каждой фазе. Из-за конфигурации обмотки это переключение меняет магнитные поля в двигателе на противоположные. Режим однополярного двигателя проще в эксплуатации и дешевле, но он генерирует примерно на 30% меньше крутящего момента, чем эквивалентный биполярный двигатель, поскольку в любой момент времени используется только половина обмоток. Униполярные двигатели лучше всего использовать в низкоскоростных приложениях.
Биполярные приводы предназначены для биполярных двигателей, то есть двигателей с четырьмя выводами.Электроника в драйвере / контроллере поочередно меняет направление тока в каждой фазе для приведения в движение ротора. Биполярные двигатели создают больший крутящий момент, чем однополярные. Однако механизм немного сложнее, что делает электронику более сложной, а иногда и более дорогой. В биполярной схеме двигатель может быть подключен параллельно или последовательно. Последовательное подключение обеспечивает более высокий крутящий момент на низкой скорости, в то время как параллельное соединение может создавать высокий крутящий момент на высокой скорости.
Схемы подключения проводов для биполярных и униполярных устройств » Кредит: Osmtech
Схема привода
Характеристики шагового двигателятакже сильно зависят от схемы привода, которая может быть настроена как на постоянное напряжение, так и на постоянный ток.
Управляющие схемы L / R называются приводами с постоянным напряжением, потому что положительное или отрицательное напряжение прикладывается к каждой обмотке для установки положения шага. L / R обозначает электрическое отношение индуктивности (L) к сопротивлению (R), которое описывает скорость изменения тока в двигателях L / R цепи. Импеданс обмотки двигателя в зависимости от скорости шага также определяется этими параметрами. Цепи привода L / R могут быть настроены для работы как биполярных, так и униполярных шаговых двигателей. Электроника также проще и дешевле, чем в схемах управления прерывателями.
Совет по выбору: Привод L / R должен «согласовывать» выходное напряжение источника питания с номинальным напряжением обмотки двигателя для непрерывной работы. Большинство опубликованных кривых характеристик двигателя основаны на полном номинальном напряжении, приложенном к его выводам. Уровень выходного напряжения источника питания должен быть установлен достаточно высоким, чтобы учесть электрические падения в схеме привода для оптимальной непрерывной работы.
Цепи привода прерывателя являются приводами постоянного тока, потому что они генерируют относительно постоянный ток в каждой обмотке.Прерыватель получил свое название от техники быстрого включения и выключения выходного напряжения (прерывания) для управления током двигателя. Для этой установки наилучшие характеристики обеспечиваются катушками двигателя с низким импедансом и доступным источником питания с максимальным напряжением. Цепи привода прерывателя используются почти исключительно для биполярных двигателей. По сравнению с приводом L / R, привод измельчителя позволяет шаговому двигателю поддерживать больший крутящий момент или усилие на более высоких скоростях, хотя и с дополнительной электроникой для контроля и управления переключением.
Совет по выбору: Как правило, для достижения оптимальной производительности рекомендуемое соотношение между напряжением источника питания и номинальным напряжением двигателя должно быть не менее восьми к одному.
Пошаговый режим
«Шаговые режимы» шагового двигателя включают полный, половинный и микрошаговый. Шаговые режимы являются определяющим фактором выходного крутящего момента шагового двигателя и его разрешающей способности (количество градусов, на которые вал двигателя вращается за импульс). Некоторые приводы с шаговыми двигателями могут иметь переключаемые ступенчатые режимы между полушагом и полным шагом.Микрошаговые приводы могут обеспечивать разрешение, выбираемое переключателем или программно.
Шаговые двигатели с полным шагом перемещаются с приращениями фактических магнитных «фиксированных» положений, что означает отсутствие электронного или управляющего повышения разрешения. В полношаговом режиме один цифровой импульс от драйвера эквивалентен одному шагу. Обычно это достигается за счет подачи питания на обе обмотки при попеременном реверсировании тока. Двигатели в полношаговом режиме развивают свой полный номинальный крутящий момент.
В полушаге привод / управление, одна обмотка запитывается, а затем две обмотки запитываются поочередно, заставляя ротор вращаться на половину расстояния. Таким образом, угловое разрешение во время движения увеличивается вдвое, и двигатель переходит к следующему магнитному положению при отключении питания. Хотя он обеспечивает примерно на 30% меньший крутящий момент, полушаговый режим обеспечивает более плавное движение, чем полушаговый режим с более высоким разрешением. Еще одно преимущество полушага состоит в том, что электроника привода не требует изменений, чтобы поддерживать его.
Microstep – это относительно новый шаговый режим шагового двигателя, включенный во многие биполярные двигатели. Этот режим электронно регулирует ток в обмотке двигателя до такой степени, что дополнительно подразделяет количество позиций между полюсами, впоследствии разделяя полный шаг на более мелкие. Как и полушаговый режим, микрошаговый режим обеспечивает примерно на 30% меньше крутящего момента, чем полушаговый режим. Кроме того, некумулятивный процент ошибок на каждом микрошаге немного больше, чем на одном полном шаге.Микрошаг обычно используется в приложениях, требующих точного позиционирования и более плавного движения в широком диапазоне скоростей.
Требования к питанию
Также важно учитывать требования к мощности привода шагового двигателя в процессе выбора. Наиболее важные характеристики:
- Напряжение питания – диапазон входного напряжения, при котором будет работать привод или контроллер, выраженное в вольтах переменного или постоянного тока.
- Входная фаза – входная фаза переменного тока, однофазная или трехфазная. Однофазный тип переменного тока является более часто используемым, обычно, но не исключительно, для приложений с более низким напряжением. Трехфазный вход обычно используется для источников питания высокого напряжения.
- Входная частота – входная частота переменного тока, выраженная в Гц.
- Непрерывный выходной ток – рабочий или предполагаемый ток, протекающий через привод, выраженный в амперах.
- Пиковый выходной ток – мощность для токового выхода привода на очень короткий период.
Рабочие параметры
Существует ряд рабочих параметров, которые являются второстепенными важными факторами при выборе приводов с шаговыми двигателями.
Рассмотрим настройку и управление привода. Это включает в себя то, как программы и информация конфигурируются и хранятся (дискеты, слоты PMCIA, компьютерный интерфейс и т. Д.), И как управляют приводом (вручную, джойстик, портативный контроллер, панель управления и т.
Следует также учитывать механизм обратной связи и режим обратной связи .Механизм – это средство, с помощью которого определяется и измеряется положение в двигателе. Типы механизмов включают датчики на эффекте Холла, резольверы, инкрементальные или абсолютные энкодеры, аналоговые датчики положения и тахометры. Режим определяет средства, с помощью которых информация передается и обрабатывается контроллером. Режимы обратной связи включают цифровую обратную связь, аналоговую обратную связь, текущий режим, режим напряжения и режим скорости.
Диапазон рабочих температур источника питания также важно учитывать, чтобы предотвратить перегрев во время работы двигателя.
Связь
При выборе привода с шаговым двигателем также важно учитывать совместимость с компьютерной шиной или архитектурой, используемой в системе. Некоторые из наиболее распространенных стандартов связи для систем с шаговыми двигателями – это Ethernet, RS232, RS485, TTL и USB.
Список литературы
Astrosyn International Technology Ltd.
Шаговый двигатель и выбор драйвера – Техасский университет (pdf)
Изображение предоставлено:
Osmtech | Национальные инструменты | GlobalSpec
| Шаговый двигатель – это бесщеточный синхронный электродвигатель, который преобразует цифровые импульсы в механическое вращение вала.Каждый оборот шагового двигателя делится на дискретное количество шагов, во многих случаях 200 шагов, и для каждого шага двигателю необходимо посылать отдельный импульс. Шаговый двигатель может делать только один шаг за раз, и каждый шаг одинакового размера. Поскольку каждый импульс заставляет двигатель вращаться на точный угол, обычно 1,8 °, положением двигателя можно управлять без какого-либо механизма обратной связи. По мере увеличения частоты цифровых импульсов шаговое движение переходит в непрерывное вращение, при этом скорость вращения прямо пропорциональна частоте импульсов.Шаговые двигатели используются каждый день как в промышленных, так и в коммерческих целях из-за их низкой стоимости, высокой надежности, высокого крутящего момента на низких скоростях и простой и прочной конструкции, которая работает практически в любых условиях.
ПОЛНЫЙ ШАГ ПОЛУШАГ МИКРОСТЕП
|
| 12-42 В постоянного тока | 0.4-3,5 А / фаза | NA | № | 317,00 долл. США | |||
| 12-42 В постоянного тока | 0,4-3,5 А / фаза | NA | № | $ 388,00 | |||
| 12-42 В постоянного тока |
| 0,21-3,5 А / фаза | RS-232 | № | 512 долларов.00 | ||
| 24-48 В постоянного тока |
| 0,1-5,0 А / фаза | RS-232 | № | $ 247,00 | ||
| 24-48 В постоянного тока |
| 0.1-5,0 А / фаза | RS-232 | № | $ 247,00 | ||
| 24-48 В постоянного тока |
| 0,1-5,0 А / фаза | RS-232 | № | 560 долларов.00 | ||
| 24-48 В постоянного тока |
| 0,1-5,0 А / фаза | RS-232 | Да | $ 560,00 | ||
| 24-48 В постоянного тока |
| 0.1-5,0 А / фаза | RS-232, RS-485 | № | $ 560,00 | ||
| 24-48 В постоянного тока |
| 0,1-5,0 А / фаза | RS-232, RS-485 | Да | 560 долларов.00 | ||
| 24-48 В постоянного тока | 0,1-5,0 А / фаза | RS-232 | № | $ 588,00 | |||
| 24-48 В постоянного тока | 0,1-5,0 А / фаза | RS-232 | NA | $ 588,00 | |||
| 24-80 В постоянного тока |
| 0.1-10,0 А / фаза | RS-232 | № | $ 247,00 | ||
| 24-80 В постоянного тока |
| 0,1-10,0 А / фаза | RS-232 | № | $ 247,00 | ||
| 24-80 В постоянного тока |
| 0.1-10,0 А / фаза | RS-232 | № | $ 560,00 | ||
| 24-80 В постоянного тока |
| 0,1-10,0 А / фаза | RS-232 | Да | 560 долларов.00 | ||
| 24-80 В постоянного тока |
| 0,1-10,0 А / фаза | RS-232, RS-485 | № | $ 560,00 | ||
| 24-80 В постоянного тока |
| 0.1-10,0 А / фаза | RS-232, RS-485 | Да | $ 560,00 | ||
| 24-80 В постоянного тока | 0,1-10,0 А / фаза | RS-232 | № | $ 588,00 | |||
| 24-80 В постоянного тока | 0,1-10,0 А / фаза | RS-232 | Да | $ 588,00 | |||
| 94-135 В переменного тока |
| 0.5-6,0 А / фаза | RS-232, RS-485 | Да | $ 984,00 | ||
| 24-48 В постоянного тока | 1,12-4,5 А / фаза | NA | № | 107,00 $ | |||
| 12-42 В постоянного тока |
| 0,1-1,2 А / фаза | RS-232 | № | 395 долларов.00 | ||
| 12-42 В постоянного тока | 0,1-1,2 А / фаза | RS-485 | № | $ 462,00 | |||
| 12-35 В постоянного тока | 0,125-2,0 А / фаза | NA | № | $ 217,00 | |||
| 12-35 В постоянного тока |
| 0.1-2,0 А / фаза | RS-232 | № | $ 348,00 | ||
| 24-75 В постоянного тока | 2.35-8.0 А / фаза | NA | № | 107,00 $ | |||
| 94-135 В переменного тока |
| 0.5-6,0 А / фаза | RS-232, RS-485 | Да | $ 984,00 | ||
| 94-135 В переменного тока |
| 0,5-6,0 А / фаза | RS-232, RS-485 | Да | $ 1170,00 | ||
| 94-135 В переменного тока | 0.5-6,0 А / фаза | RS-232, RS-485 | Да | $ 1292,00 | |||
| 94-265 В переменного тока |
| 0,5-3,2 А / фаза | RS-232, RS-485 | Да | $ 1168,00 | ||
| 94-265 В переменного тока |
| 0.5-3.2 А / фаза | RS-232, RS-485 | Да | $ 1168,00 | ||
| 94-264 В переменного тока | 0,5-3,2 А / фаза | RS-232, RS-485 | Да | $ 1446,00 | |||
| 24-48 В постоянного тока |
| 0.1-5,0 А / фаза | Ethernet | № | $ 677,00 | ||
| 24-48 В постоянного тока |
| 0,1-5,0 А / фаза | Ethernet | Да | 677 долларов.00 | ||
| 24-48 В постоянного тока | 0,1-5,0 А / фаза | RS-232, CANopen | № | $ 649,00 | |||
| 24-48 В постоянного тока | 0,1-5,0 А / фаза | RS-232, CANopen | Да | $ 649,00 | |||
| 24-80 В постоянного тока |
| 0.1-10,0 А / фаза | Ethernet | № | $ 677,00 | ||
| 24-80 В постоянного тока |
| 0,1-10,0 А / фаза | Ethernet | Да | 677 долларов.00 | ||
| 24-80 В постоянного тока | 0,1-10,0 А / фаза | RS-232, CANopen | № | $ 649,00 | |||
| 24-80 В постоянного тока | 0,1-10,0 А / фаза | RS-232, CANopen | Да | $ 649,00 | |||
| 24-80 В постоянного тока |
| 0.1-10,0 А / фаза | Ethernet, EtherNet / IP | Да | $ 677,00 | ||
| 24-80 В постоянного тока |
| 0,1-10,0 А / фаза | Ethernet, EtherNet / IP | № | $ 677,00 | ||
| 24-48 В постоянного тока |
| 0.1-5,0 А / фаза | Ethernet, EtherNet / IP | Да | $ 677,00 | ||
| 24-48 В постоянного тока |
| 0,1-5,0 А / фаза | Ethernet, EtherNet / IP | № | $ 677,00 | ||
| 94-135 В переменного тока |
| 0.5-5,0 А / фаза | Ethernet, EtherNet / IP | Да | $ 486,00 | ||
| 94-265 В переменного тока |
| 0,5-2,55 А / фаза | Ethernet, EtherNet / IP | Да | $ 486,00 | ||
| 12-48 В постоянного тока | 0.3-2.2 А / фаза | NA | № | $ 98,00 | |||
| 94-265 В переменного тока |
| 0,5-3,2 А / фаза | RS-232, RS-485 | Да | $ 1354,00 | ||
| 12-48 В постоянного тока | 0.3-3,0 А / фаза | NA | № | $ 90,00 | |||
| 90-240 В переменного тока | 0,5-2,5 А / фаза | NA | № | 390,00 долл. США | |||
| 90-240 В переменного тока | 0,5-8,0 А / фаза | NA | № | $ 462,00 | |||
| 12-48 В постоянного тока |
| 0.1-3,0 А / фаза | RS-485, CANopen, Ethernet, EtherNet / IP, EtherCAT, Ethernet, двухпортовый | № | $ 154,00 | ||
| 12-48 В постоянного тока |
| 0,1-6,0 А / фаза | RS-485, CANopen, Ethernet, EtherNet / IP, EtherCAT, Ethernet, двухпортовый | № | 154 доллара.00 | ||
| 24-70 В постоянного тока |
| 0,1-10,0 А / фаза | RS-485, CANopen, Ethernet, EtherNet / IP, EtherCAT, Ethernet, двухпортовый | № | 176,00 $ |
