
Шаговый электродвигатель это синхронный бесщёточный электродвигатель с несколькими обмотками. Ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения ротора, они же шаги. Именно поэтому двигатель называется шаговым. Для управления шаговым двигателем используется специальный контроллер, который называют драйвером шагового двигателя.
Шаговые двигатели стандартизованы национальной ассоциацией производителей электрооборудования NEMA по посадочным размерам и размеру фланца. Самые ходовые типоразмеры это NEMA 17 с фланцем 42*42мм, NEMA 23 с фланцем 57*57мм и NEMA 34 размером 86*86мм соответственно. Шаговые электродвигатели NEMA 17 могут создавать крутящий момент приблизительно до 6 кг*см, NEMA 23 до 30 кг*см и NEMA 34 до 120 кг*см.
Как устроен шаговый двигатель
Конструктивно шаговые двигатели можно поделить на три больших класса – это двигатели с переменным магнитным сопротивлением, двигатели с постоянными магнитами и гибридный класс, сочетающий характеристики первых двух.
Шаговые двигатели с переменным магнитным сопротивлением имеют несколько полюсов на статоре и ротор из магнитомягкого материала, который не сохраняет остаточную намагниченность. Для простоты ротор на рисунке имеет 4 зубца, а статор имеет 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых намотана на двух противоположных полюсах статора. Двигатель на рисунке имеет шаг 30 град.
При включении тока в одной из катушек, ротор стремится занять положение, когда магнитный поток замкнут, т.е. зубцы ротора будут находиться напротив тех полюсов, на которых находится запитанная обмотка. Если затем выключить эту обмотку и включить следующую, то ротор поменяет положение, снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение, нужно включать фазы попеременно. Такой двигатель не чувствителен к направлению тока в обмотках, а из-за того, что ротор не имеет магнитных свойств, данный тип двигателя может работать на высоких оборотах. Так же данный тип двигателя легко отличить от других шаговиков, просто повращав его за вал, когда он отключен. Вал будет крутиться свободно, тогда как у остальных типов явно будут ощущаться шаги. Иногда поверхность каждого полюса статора выполняют зубчатой, что вместе с соответствующими зубцами ротора обеспечивает уменьшение значения угла шага до нескольких градусов. Двигатели с переменным магнитным сопротивлением сейчас почти не используют.
Двигатели с постоянными магнитами состоят из статора с обмотками и ротора, содержащего постоянные магниты. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
Показанный на рисунке двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Статор имеет 2 независимые обмотки, каждая из которых намотана на двух противоположных полюсах. Двигатель на рисунке имеет величину шага 30 град, так же, как и предыдущий. При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга и для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют от 48 до 24 шагов на оборот, что соответствует углам шага 7.5 – 15 град).
На практике двигатель с постоянными магнитами выглядит, например, вот так. Увидеть такой двигатель можно в лазерном принтере.
Двигатели с постоянными магнитами подвержены влиянию обратной ЭДС со стороны ротора, которая ограничивает максимальную скорость. Это значит, что при свободном выбеге на больших оборотах двигатель сработает как генератор и может сжечь драйвер током, который сам и сгенерирует. Это же относится и к гибридным двигателям.
Гибридные двигатели сочетают в себе лучшие черты шаговых двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Гибридные шаговые двигатели обеспечивают меньшую величину шага, больший момент и большую скорость, чем двигатели с переменным магнитным сопротивлением и двигатели с постоянными магнитами.
Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400, что соответсвует углам шага 3.6 – 0.9 градусов. Ротор показанного на рисунке двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1.8 град.
Выглядит гибридный двигатель, например, вот так.
Большинство современных шаговых двигателей являются именно гибридными, поэтому давайте подробней рассмотрим устройство шаговых двигателей этого типа.
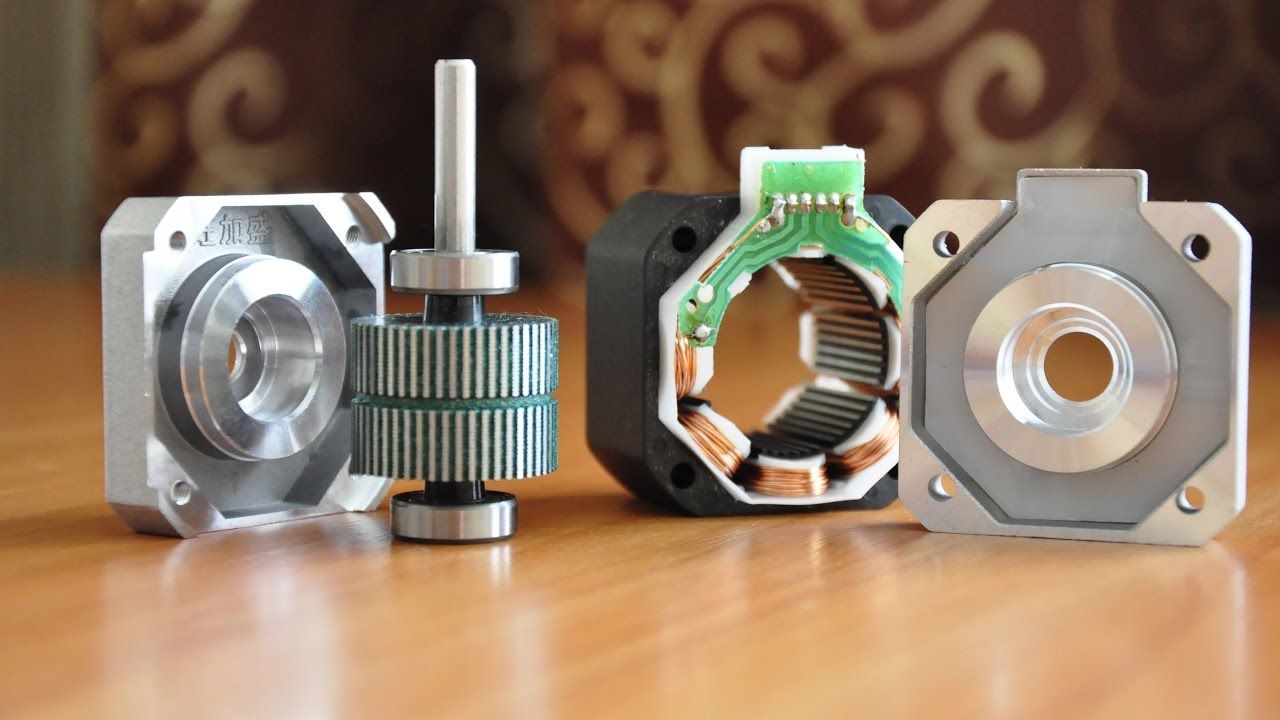
Ротор двигателя разделен поперек на две части, между которыми расположен цилиндрический постоянным магнит. Благодаря этому зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для двигателей с шагов в 3,6 градуса и 8 основных полюсов в случае шагов в 1.8 и 0.9 градусов. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.
Посмотрим на продольное сечение гибридного шагового двигателя. Стрелками показано направление магнитного потока постоянного магнита ротора. Часть потока (на рисунке показана черной линией) проходит через полюсные наконечники ротора, воздушные зазоры и полюсный наконечник статора. Эта часть не участвует в создании момента.
Как видно на рисунке, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубьев, что очень хорошо было видно на предыдущем фото. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и, как следствие, обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока (на рисунке показана штриховой белой линией), которая и создает момент. Часть цепи лежит в плоскости, перпендикулярной рисунку, поэтому она не показана. В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора и слабо влияет на постоянный магнит. Поэтому в отличие от двигателей постоянного тока, магнит гибридного шагового двигателя невозможно размагнитить ни при какой величине тока обмоток.
Величина зазора между зубцами ротора и статора очень небольшая, около 0.1 мм. Это требует высокой точности при сборке, поэтому шаговый двигатель не стоит разбирать ради удовлетворения любопытства, иначе на этом его служба может закончиться.
Чтобы магнитный поток не замыкался через вал, который проходит внутри магнита, его изготавливают из немагнитных марок стали.
Для получения больших моментов необходимо увеличивать как поле, создаваемое статором, так и поле постоянного магнита . При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.

Мы рассмотрели устройство самого «железа» шаговых двигателей, но помимо этого двигатели можно еще поделить по количеству и способу коммутации их обмоток.
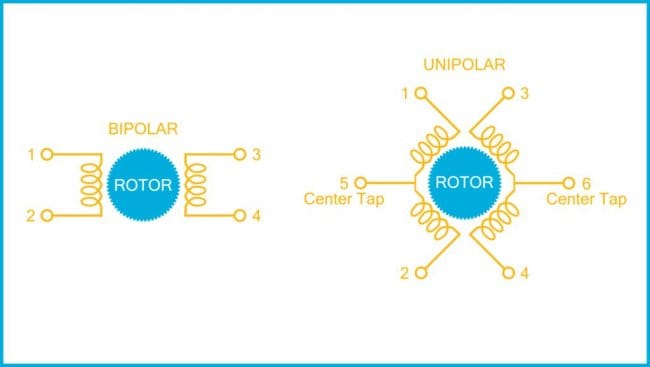
Тут всего два основных вида – биполярный и униполярный
Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Для такого типа двигателя требуется мостовой или полумостовой драйвер. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода. Примером распространенного биполярного двигателя может быть шаговый двигатель марки 17HS4401
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера, который в случае униполярного двигателя должен иметь только 4 простых ключа. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 выводов, как на рисунке, или 6 выводов в случае если выводы AB и CD разъединены. Униполярный двигатель с двумя обмотками и отводами можно использовать в биполярном режиме, если отводы оставить неподключенными.
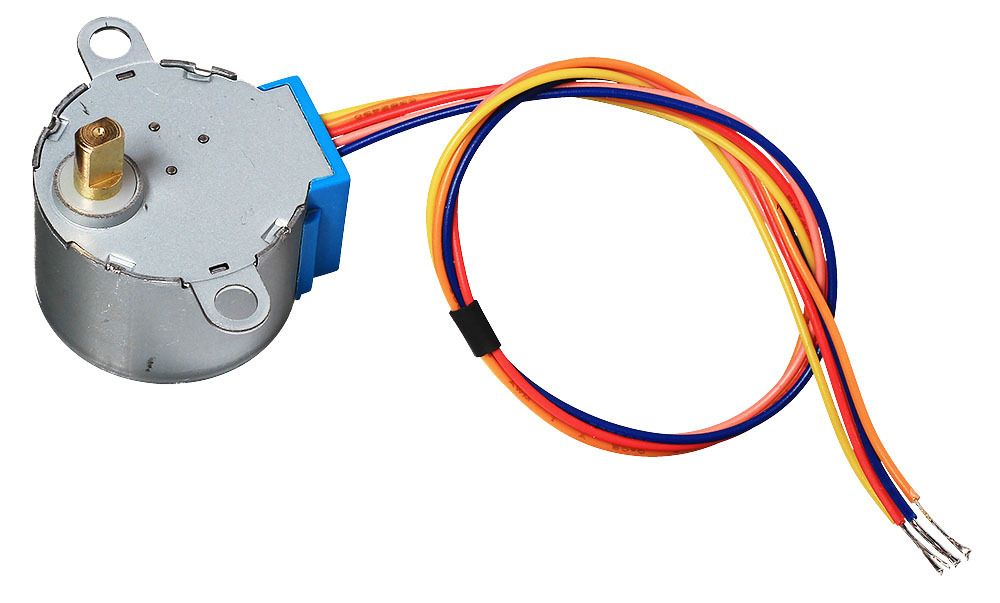
Примером распространенного униполярного двигателя с пятью выводами может быть шаговый двигатель марки 28BYJ-48. Данный двигатель можно переделать в биполярный, разделив выводы AB и CD, для чего достаточно перерезать одну из перемычек на плате под синей крышкой.
Иногда двигатели имеют 4 раздельные обмотки, по этой причине их ошибочно называют 4-х фазными или четырехобмоточными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать и как униполярный, и как биполярный.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность, а значит при одних и тех же размерах биполярные двигатели обеспечивают больший момент. Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Путей для повышения магнитного поля два – это увеличение тока или числа витков обмоток. Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника, однако на практике гораздо более существенным является ограничение по нагреву двигателя в следствии потерь из-за омического сопротивления обмоток. Тут и проявляется преимущество конструкции биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток, а другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра или увеличивать габариты двигателя. В то же время в биполярном двигателе всегда работают все обмотки. Иными словами, на биполярный двигатель той же мощности надо намотать в два раза меньше медного обмоточного провода, чем на униполярный, а случае, если обмотки равны по массе, то биполярный двигатель будет мощнее примерно на 40%.
На практике можно встретить оба типа двигателей, так как биполярные дешевле из-за меньшей материалоемкости, а униполярные требуют значительно более простых драйверов. В настоящее время наиболее широко распространены гибридные биполярные двигатели.
Где приобрести ШД? Вы можете купить шаговые двигатели в нашем магазине 3DIY с доставкой по всей России!
Управление шаговым двигателем
Независимо от того, какой драйвер или двигатель использован, управление шаговым двигателем может осуществляться в одном из трёх режимов:
-
полношаговое
-
полушаговое
-
микрошаговое
Полношаговый режим управления ШД подразумевает попеременную коммутацию фаз без перекрытия, при этом единовременно к источнику напряжения подключена только одна из фаз. При таком способе управления на каждый полный шаг электродвигателя приходится одна фаза и точки равновесия ротора идентичны полюсам статора. Данный режим имеет и недостаток: в случае с биполярным двигателем в полношаговом режиме в один и тот же момент задействуется только половина обмоток, с униполярным – четверть. Существует и другой вариант полношагового управления, подразумевающий единовременное включение двух фаз. Такой способ управления ШД основан на фиксации ротора между полюсами статора благодаря подаче питания на обмотки, при этом на полный шаг приходится две фазы. При этом способе управления точка равновесия ротора смещается на половину шага относительно способа с одной фазой, а момент возрастает примерно на 40 процентов.
Применение полушагового режима управления шаговым двигателем позволяет увеличить количество шагов, приходящихся на один оборот ротора, в два раза. При работе ШД в таком режиме на каждый второй шаг приходится включение одной из фаз, а между шагами включаются сразу обе. Фактически это комбинация переменного включения однофазного и двухфазного полношаговых режимов.
Микрошаговый режим управления ШД применяется тогда, когда необходимо получение максимально большого количества шагов, приходящихся на оборот ротора. При работе в таком режиме так же работают две фазы, однако токи обмоток в данном случае распределяются неравномерно, а не 50/50, как в полушаговом. Величина микрошага зависит от конкретного устройства и настроек драйвера. При работе в микрошаговом режиме точность позиционирования ШД значительно повышается, однако требуется более сложный драйвер двигателя.
Где приобрести драйвера ШД? Купить драйвера шаговых двигателей можно у нас в онлайн магазине с доставкой!
Конструктивные исполнения ШД
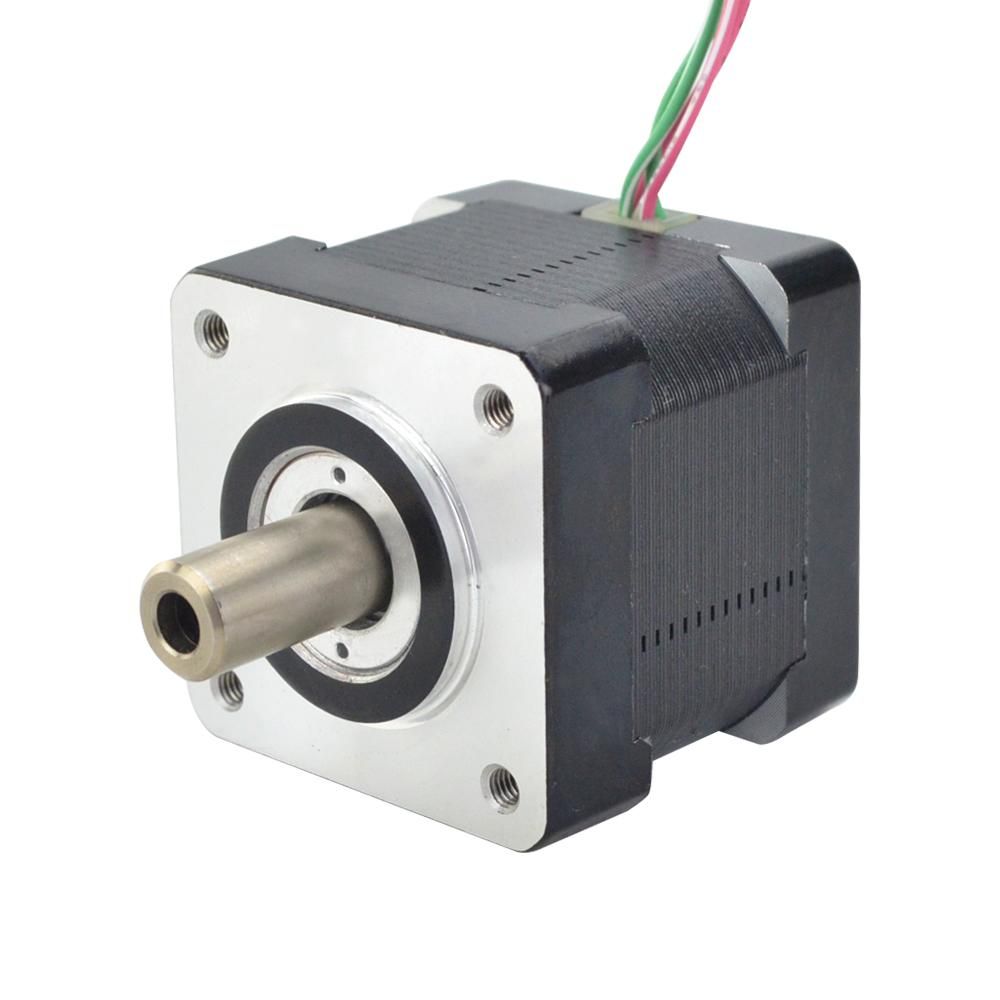
Обычный шаговый двигатель
Тут нет никаких изысков – корпус, вал, в общем стандарт. Широко распространен в разном оборудовании, начиная от фрезеров и 3д принтеров, заканчивая приводом заслонки или мешалки.
Двигатель с полым валом
Шаговые двигатели с полым валом применяются когда существует необходимость передачи крутящего момента без применения соединительных муфт, например для использования в ограниченном пространстве. Так же сквозь него можно продеть длинный вал, который будет торчать с двух сторон и синхронно крутить что-то с одной и с другой стороны.
Двигатель со встроенной в вал приводной гайкой
Такой вид двигателя может найти применение в том случае, если требуется быстрое перемещение на большое расстояние. Длинный винт на высоких оборотах ведет себя подобно скакалке, а при использовании такого мотора винт можно неподвижно натянуть между опорами, а сам мотор закрепить на подвижной части оборудования. Тогда длина и нежесткость винта не будет влиять на максимальную скорость.
Двигатель с двойным валом
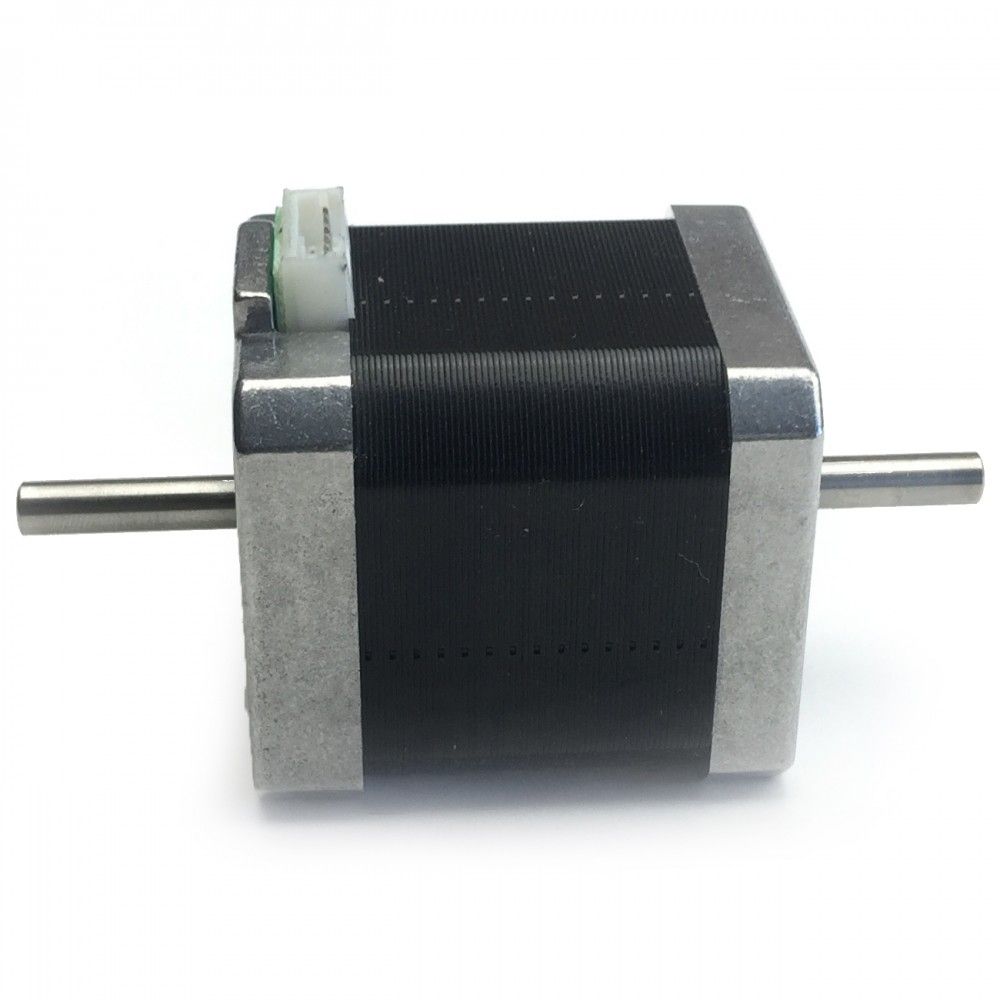
В этом исполнении двигатель имеет удлиненный вал, длинный конец которого выступает со стороны задней крышки. На этот удлиненный вал можно повесить барашек, чтоб можно было выставить положение вала вручную, повесить энкодер и получить сервошаговый двигатель, а можно повесить дополнительный шкив или винт, которые будут работать абсолютно синхронно с передним валом.
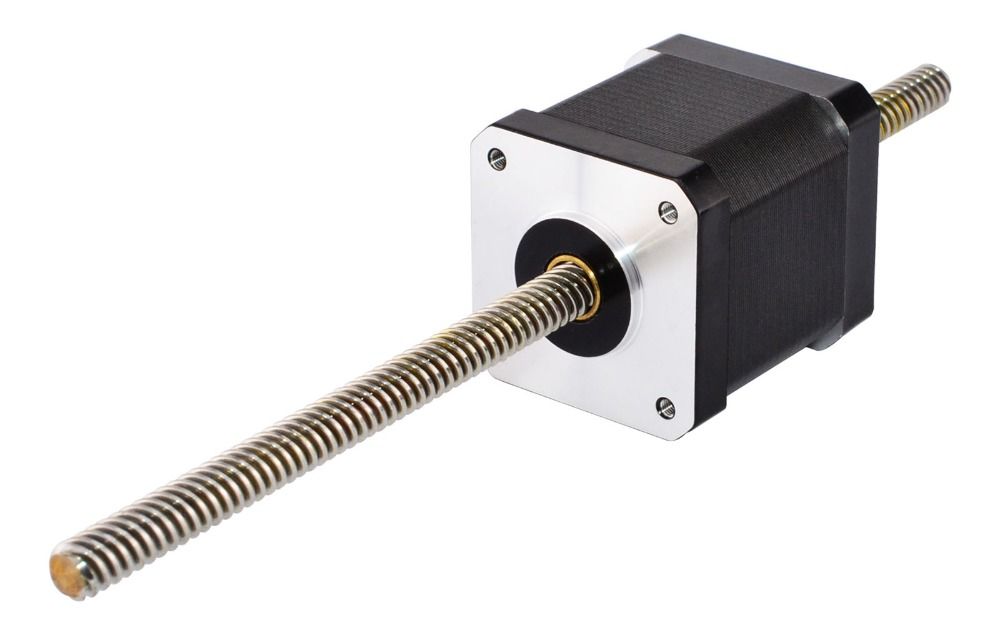
Двигатель с винтом вместо вала

Находят себе применение например в 3д принтерах или в любом другом месте, где хочется сэкономить место не только на муфте между валом и винтом, но и на подшипниковой опоре винта, роль которой в данном случае выполняют подшипники двигателя.
Двигатель со встроенным тормозом

Позволяет зафиксировать вал в нужной позиции дополнительно к удержанию самим шаговиком. Так же позволяет удерживать вал в случае отключения питания двигателя.
Двигатель с редуктором

Редуктор позволяет понизить обороты двигателя и поднять его крутящий момент. Данное исполнение редко встречается в связи с тем, что шаговые двигатели и так имеют значительный момент на низких оборотах и сами по себе могут достигать весьма низких скоростей вращения.
Двигатель с энкодером

Он же сервошаговый двигатель. Фактически это сервопривод на шаговом двигателе. На удлиненный вал со стороны задней крышки монтируется энкодер в корпусе и благодаря этому мы получаем обратную связь о положении вала двигателя. В случае пропуска шагов двигателем контроллер узнает об этом и ориентируясь на показания энкодера будет подавать дополнительные импульсы до тех пор, пока вал не займет нужное положение. Сервошаговый двигатель используется со своим специальным драйвером, который имеет вход для подключения энкодера.
Преимущества шагового двигателя
- угол поворота ротора определяется числом поданных импульсов. Шаговый двигатель крутится не плавно, а шагами, шаг имеет определенную величину. Поэтому чтобы повернуть вал в нужное положение мы просто подаем известное нам количество импульсов.
- зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи. Один шаг – один импульс. Какое количество импульсов подали, в то положение двигатель и шагнул.
- двигатель обеспечивает полный момент в режиме остановки. Это хорошо тем, что для фиксации положения вала запитанному двигателю не нужен тормоз, можно тормозить его при помощи драйвера.
- прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность от 3 до 5% от величины шага. Эта ошибка не накапливается от шага к шагу, так как на один оборот двигателя приходится неизменное количество шагов, совершив которые мы всегда получим поворот на 360 градусов.
- высокая надежность. Высокая надежность двигателя связанна с отсутствием щеток. Срок службы фактически определяется сроком службы подшипников
- возможность получения низких скоростей вращения. Для получения низкой скорости вращения двигателя достаточно замедлить скорость подачи импульсов, тогда двигатель будет медленнее шагать и скорость его вращения будет небольшой.
- большой крутящий момент на низких скоростях. Большой крутящий момент на низких оборотах позволяет отказаться от применения редуктора, что упрощает конструкцию оборудования
- может быть перекрыт довольно большой диапазон скоростей. Скорость вращения двигателя пропорциональна частоте входных импульсов, подавая их быстрее или медленнее мы так же влияем и на скорость вращения.
Недостатки шагового двигателя:
- шаговым двигателем присуще явление резонанса. Шаговые двигатели обладают собственной резонансной частотой. Это связано с тем, что ротор после подачи тока в обмотку некоторое время колеблется, прежде чем зафиксироваться в конечном положении, и колебания тем сильней, чем больше инерция ротора. Резонанс приводит к повышенному шуму, вибрациям и падению крутящего момента двигателя. Один из способов победить резонанс – увеличить деление шага. Мелкие перемещения в микрошаге не требуют длительных разгона и фиксации ротора, быстро останавливают его между шагами и увеличивают частоту шагания выше резонансной.
- возможна потеря контроля положения ввиду работы без обратной связи. При превышении усилия на валу выше того, который может создать двигатель, он начнет пропускать шаги. Так как у двигателя нет обратной связи, то контроллер не может узнать об этом и даже если двигатель начнет вращаться снова, стартует он уже из неправильного рабочего положения. Для устранения этого недостатка можно использовать сервошаговый двигатель или увеличить момент на валу, повысив напряжение, настроив драйвер на больший ток или заменив двигатель на более мощный.
- потребляет энергию независимо от нагрузки. Шаговый двигатель в промежуточном положении фиксируется с полным моментом. Шагает он тоже с полным моментом. Поэтому он продолжает потреблять электричество без особой зависимости от нагрузки на валу. Снизить общее потребление энергии двигателем мы можем применив драйвера, которые уменьшают подаваемый в режиме удержания ток.
- затруднена работа на высоких скоростях. На высоких скоростях вращения шаговый двигатель значительно теряет момент и при достижении определенной частоты оборотов момент становится настолько мал, что вал не может дальше крутиться. В этом момент двигатель останавливается и гудит с частотой подаваемых импульсов. Этот недостаток можно устранить, повысив питающее напряжение, что увеличит крутящий момент как на повышенных, так и на пониженных оборотах, использовать более продвинутый драйвер, который на высоких скоростях вращения переходит на полношаговый режим управления двигателем или попросту заменив шаговик на сервопривод, который рассчитан на высокие скорости.
- невысокая удельная мощность.Шаговый двигатель по удельной мощности на грамм веса не самый энергонасыщенный электропривод. Сделать с этим мы ничего не можем.
- относительно сложная схема управления.Драйвера шаговых двигателей насыщены электроникой. Тут мы тоже не можем что-то изменить.
Как выбрать шаговый двигатель? На какие параметры обратить внимание.
- вида двигателя (его размеры)
- тока фазы
- индуктивность
Что касается вида двигателя, то при отсутствии каких-то определенных предпочтений мы бы рекомендовали использовать биполярные шаговые двигатели с 4 выводами, так как они наиболее распространены и, что не менее важно, не менее распространены драйвера для них. То есть случае какой-либо поломки вы легко найдете замену и отремонтируете станок.
Размер двигателя и его ток проще всего подобрать, ориентируясь на готовые станки от известных производителей, которые близки к конструируемому по размерам и характеристикам – проверенная конструкция означает, что двигатели уже подобраны оптимальным образом и можно взять их характеристики за основу. Производитель двигателя в данном случае не особо важен, так как ввиду отработанной технологии производства их характеристики у разных производителей примерно одинаковые.
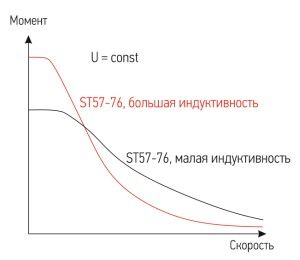
Остается одна характеристика – индуктивность.
При одинаковом напряжении питания двигатели с большей индуктивностью имеют больший момент на низких оборотах, и меньший – на высоких, как видно из графика. Но большая индуктивность потенциально дает вам возможность получить больший крутящий момент, повысив напряжение питания, тогда как при использовании двигателей с небольшой индуктивностью повышение напряжения может привести к тому, что двигатель будет перегреваться без заметной прибавки в характеристиках. Это связано с тем, что нарастание тока в обмотках с низкой индуктивностью идет быстрее и мы легко можем получить среднее значение тока выше номинального, а как следствие этого – перегрев. Таким образом при прочих равных лучше выбрать двигатель с большим значением индуктивности.
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Устройство и принцип работы
 Рис. 1. Принцип действия шагового двигателя
Рис. 1. Принцип действия шагового двигателяНа рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
 С переменным магнитным сопротивлением
С переменным магнитным сопротивлениемВесомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
 С постоянным магнитом
С постоянным магнитомГибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
 Устройство гибридного шагового двигателя
Устройство гибридного шагового двигателя
Преимущества гибридного шагового двигателя заключатся в его высокой точности, плавности и скорости перемещения, малым шагом – от 0,9 до 5°. Их применяют для высококлассных станков ЧПУ, компьютерных и офисных приборах и современной робототехнике. Единственным недостатком считается относительно высокая стоимость.
Для примера разберем вариант гибридных ШД на 200 шагов позиционирования вала. Соответственно каждый из цилиндров будет иметь по 50 зубцов, один из них является положительным полюсом, второй отрицательным. При этом каждый положительный зубец расположен напротив паза в отрицательном цилиндре и наоборот. Конструктивно это выглядит так:
 Расположение пазов гибридника
Расположение пазов гибридникаИз-за чего на валу шагового двигателя получается 100 перемежающихся полюсов с отличной полярностью. Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.
 Рис. 6. Принцип работы гибридного ШД
Рис. 6. Принцип работы гибридного ШДЗа счет такой конструкции можно достичь смещения того же южного полюса относительно статора в 50 различных позиций. За счет отличия положения в полупозиции между северным и южным полюсом достигается возможность перемещения в 100 позициях, а смещение фаз на четверть деления предоставляет возможность увеличить количество шагов за счет последовательного возбуждения еще вдвое, то есть до 200 шагов углового вала за 1 оборот.
Обратите внимание на рисунок 6, принцип работы такого шагового двигателя заключается в том, что при попарной подаче тока в противоположные обмотки происходит подтягивание разноименных полюсов ротора, расположенных за зубьями статора и отталкивание одноименных, идущих перед ними по ходу вращения.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.
 Униполярный ШД
Униполярный ШДДля использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.
 Схема а) с различными, б) с одним выводом
Схема а) с различными, б) с одним выводомБиполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
 Биполярный шаговый двигатель
Биполярный шаговый двигательВ конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Подключение шагового двигателя
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
В зависимости от схемы подключения должны применяться те или другие выводы шагового агрегата. При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
Типичные схемы подключения ШД
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:
 Схемы подключения различных типов шаговых двигателей
Схемы подключения различных типов шаговых двигателейПри условии запитки основных полюсов шаговой машины от одного и того же драйвера, по данным схемам можно отметить следующие отличительные особенности работы:
- Выводы однозначно подводятся к соответствующим клеммам устройства. При последовательном соединении обмоток увеличивает индуктивность обмоток, но понижает ток.
- Обеспечивает паспортное значение электрических характеристик. При параллельной схеме увеличивается ток и снижается индуктивность.
- При подключении по одной фазе на обмотку снижется момент на низких оборотах и уменьшает величину токов.
- При подключении осуществляет все электрические и динамические характеристики согласно паспорта, номинальный токи. Значительно упрощается схема управления.
- Выдает куда больший момент и применяется для больших частот вращения;
- Как и предыдущая предназначена для увеличения момента, но применяется для низких частот вращения.
Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.
 Волновое управление
Волновое управлениеПолношаговый — в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.
 Полношаговое управление
Полношаговое управлениеПолушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.
 Полушаговое управление
Полушаговое управлениеДля более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами. Позволяет в значительной степени снизить рывки шагового двигателя.
Без контроллера
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
 Схема Н-моста
Схема Н-мостаКак видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
 Подключение через контроллер однополярного шагового двигателя
Подключение через контроллер однополярного шагового двигателяПопулярные схемы управления ШД
 Схема управления от контроллера с дифференциальным выходом
Схема управления от контроллера с дифференциальным выходомЯвляется одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.
 Схема управления от контроллера с выходом типа «открытый коллектор»
Схема управления от контроллера с выходом типа «открытый коллектор»В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока. Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
Простейший драйвер шагового двигателя своими руками
Чтобы собрать схему драйвера в домашних условиях могут пригодиться некоторые элементы от старых принтеров, компьютеров и другой техники. Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).
 Схема простейшего драйвера
Схема простейшего драйвераДля построения программы руководствуйтесь следующим принципом: при подаче на один из выводов D логической единицы (остальные сигнализируют ноль) происходит открытие транзистора и сигнал проходит к катушке двигателя. Таким образом, выполняется один шаг.
На основе схемы составляется печатная плата, которую можно попытаться изготовить самостоятельно или сделать под заказ. После чего на плате впаиваются соответствующие детали. Устройство способно управлять шаговым устройством от домашнего компьютера за счет подключения к обычному USB порту.
Полезное видео
Шаговый двигатель
Дмитрий Левкин
Шаговый электродвигатель – это вращающийся электродвигатель с дискретными угловыми перемещениями ротора, осуществляемыми за счет импульсов сигнала управления [1].Предшественником шагового двигателя является серводвигатель.
Шаговые (импульсные) двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2].
Поэтому в задачах, где требуются высокие характеристики (точность, быстродействие) используются серводвигатели. В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
Шаговый двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор – неподвижная часть, ротор – вращающаяся часть.

Гибридный шаговый электродвигатель
Шаговые двигатели надежны и недороги, так как ротор не имеет контактных колец и коллектора. Ротор имеет либо явно выраженные полюса, либо тонкие зубья. Реактивный шаговый двигатель – имеет ротор из магнитомягкого материала с явно выраженными полюсами. Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Гибридный шаговый двигатель имеет составной ротор включающий полюсные наконечники (зубья) из магнитомягкого материала и постоянные магниты. Определить имеет ротор постоянные магниты или нет можно посредством вращения обесточенного двигателя, если при вращении имеется фиксирующий момент и/или пульсации значит ротор выполнен на постоянных магнитах.
Статор шагового двигателя имеет сердечник с явно выраженными полюсами, который обычно делается из ламинированных штампованных листов электротехнической стали для уменьшения вихревых токов и уменьшения нагрева. Статор шагового двигателя обычно имеет от двух до пяти фаз.
Так как шаговый двигатель не предназначен для непрерывного вращения в его параметрах не указывают мощность. Шаговый двигатель – маломощный двигатель по сравнению с другими электродвигателями.
Одним из определяющих параметров шагового двигателя является шаг ротора, то есть угол поворота ротора, соответствующий одному импульсу. Шаговый двигатель делает один шаг в единицу времени в момент изменения импульсов управления. Величина шага зависит от конструкции двигателя: количества обмоток, полюсов и зубьев. В зависимости от конструкции двигателя величина шага может меняться в диапазоне от 90 до 0,75 градусов. С помощью системы управления можно еще добиться уменьшения шага пополам используя соответствующий метод управления.
Реактивный шаговый двигатель – синхронный реактивный двигатель. Статор реактивного шагового двигателя обычно имеет шесть явновыраженных полюсов и три фазы (по два полюса на фазу), ротор – четыре явно выраженных полюса, при такой конструкции двигателя шаг равен 30 градусам. В отличии от других шаговых двигателей выключенный реактивный шаговый двигатель не имеет фиксирующего (тормозящего) момента при вращении вала.

Трехфазный реактивный шаговый двигатель
(шаг 30°)

Четырехфазный реактивный шаговый двигатель
(шаг 15°)
Ниже представлены осциллограммы управления для трехфазного шагового двигателя.

Униполярное волновое управление

Биполярное полношаговое управление

Биполярное 6-шаговое управление
Осциллограммы управления для четырехфазного шагового двигателя показаны на рисунке ниже. Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
 ,
,
- где NR – количество полюсов ротора;
- NS – количество полюсов статора.

Осциллограммы управления 4-х фазным реактивным шаговым двигателем
Чтобы изменить направление вращения ротора (реверс) реактивного шагового двигателя, необходимо поменять схему коммутации обмоток статора, так как изменение полярности импульса не изменяет направления сил, действующих на невозбужденный ротор [2].
Реактивные шаговые двигатели применяются только тогда, когда требуется не очень большой момент и достаточно большого шага угла поворота. Такие двигатели сейчас редко применяются.
- Отличительные черты:
- ротор из магнитомягкого материала с явно выраженными полюсами;
- наименее сложный и самый дешевый шаговый двигатель;
- отсутствует фиксирующий момент в обесточенном состоянии;
- большой угол шага.
Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Статор обычно имеет две фазы.
По сравнению с реактивными, шаговые двигатели с активным ротором создают большие вращающие моменты, обеспечивают фиксацию ротора при снятии управляющего сигнала. Недостаток двигателей с активным ротором — большой угловой шаг (7,5—90°). Это объясняется технологическими трудностями изготовления ротора с постоянными магнитами при большом числе полюсов. Если угол фиксации находится в диапазоне от 7,5 до 90 градусов скорее всего это шаговый двигатель с постоянными магнитами нежели гибридный шаговый двигатель.
Обмотки могут иметь ответвление в центре для работы с однополярной схемой управления. Двухполярное управление требуется для питания обмоток без центрального ответвления.
Униполярный (однополярный) шаговый двигатель
Униполярный шаговый двигатель с постоянными магнитами имеет одну обмотку на фазу с ответвлением в центре. Каждая секция обмотки включается отдельно.
Таким образом расположение магнитных полюсов может быть изменено без изменения направления тока, а схема коммутации может быть выполнена очень просто (например на одном транзисторе) для каждой обмотки. Обычно центральное ответвление каждой фазы делается общим, в результате получается три вывода на фазу и всего шесть для обычного двухфазного двигателя.
Легкое управление однополярными двигателями сделало их популярными для любителей, они возможно являются наиболее дешевым способом чтобы получить точное угловое перемещение.

Схема униполярного двухфазного шагового двигателя

Схема биполярного двухфазного шагового двигателя
Биполярный шаговый двигатель
Двухполярные двигатели имеют одну обмотку на фазу. Для того чтобы изменить магнитную полярность полюсов необходимо изменить направление тока в обмотке, для этого схема управления должна быть более сложной, обычно с H-мостом. Биполярный шаговый двигатель имеет два вывода на фазу и не имеет общего вывода. Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Управление шаговым двигателем с постоянными магнитами
Для управления шаговым двигателем на постоянных магнитах к его обмоткам прикладывается сфазированный переменный ток. На практике это почти всегда прямоугольный сигнал сгенерированный от источника постоянного тока. Биполярная система управления генерирует прямоугольный сигнал изменяющийся от плюса к минусу, например от +2,5 В до -2,5 В. Униполярная система управления меняет направление магнитного потока катушки посредством двух сигналов, которые поочереди подаются на противоположные выводы катушки относительно ее центрального ответвления.
Волновое управление
Простейшим способом управления шаговым двигателем является волновое управление. При таком управлении в один момент времени возбуждается только одна обмотка. Но такой способ управления не обеспечивает максимально возможного момента.

Положение ротора шагового двигателя при волновом управлении
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора.

Волновое управление биполярным шаговым двигателем
На рисунке выше представлены схема биполярного шагового двигателя и двухполюсные осциллограммы управления. При таком управлении обе полярности (“+” и “-“) подаются на двигатель. Магнитное поле катушки поворачивается за счет того, что полярность токов управления меняется.

Волновое управление униполярным шаговым двигателем
На рисунке выше представлены схема униполярного шагового двигателя и однополюсные осциллограммы управления.Так как для управления униполярным шаговым двигателем требуется только одна полярность это существенно упрощает схему системы управления. При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
Необходимое для работы шагового двигателя переменное магнитное поле может быть создано как униполярным так и биполярным способом. Однако для униполярного управления катушки двигателя должны иметь центральное ответвление.
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора. Схемы соединения шагового двигателя показаны на рисунке ниже.

Схема 4 выводного биполярного шагового двигателя

Схема 5 выводного униполярного шагового двигателя

Схема 6 выводного униполярного шагового двигателя

Схема 8 выводного шагового двигателя
Шаговый двигатель с 4 выводами может управляться только биполярным способом. 6-выводной двигатель предназначен для управления униполярным способом, несмотря на то, что он также может управляться биполярным способом если игнорировать центральные выводы. 5-выводной двигатель может управляться только униполярным способом, так как общий центральный вывод соединяет обе фазы. 8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель. Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
- 8-выводные двигатели могут быть соединены в нескольких конфигурациях:
- униполярной;
- биполярной с последовательным соединением. Больше индуктивность, но ниже ток обмотки;
- биполярной с параллельным соединением. Больше ток, но ниже индуктивность;
- биполярной с одной обмоткой на фазу. Метод использует только половину обмоток двигателя при работе, что уменьшает доступный момент на низких оборотах, но требует меньше тока.
Полношаговое управление
Полношаговое управление обеспечивает больший момент, чем волновое управление так как обе обмотки двигателя включены одновременно. Положение ротора при полношаговом управлении показано на рисунке ниже.

Положение ротора шагового двигателя при полношаговом управлении

Полношаговое биполярное управление шаговым двигателем
Полношаговое биполярное управление показанное на рисунке выше имеет такой же шаг как и при волновом управлении. Униполярное управление (не показано) потребует два однополярных управляющих сигнала для каждого биполярного сигнала. Однополярное управление требует менее сложной и дорогой схемы управления. Дополнительная стоимость биполярного управления оправдана когда требуется более высокий момент.
Полушаговое управление
Шаг для данной геометрии шагового двигателя делится пополам. Полушаговое управление обеспечивает большее разрешение при позиционировании вала двигателя.

Положение ротора шагового двигателя при полушаговом управлении
Полушаговое управление – комбинация волнового управления и полношагового управления с питанием по очереди: сначала одной обмотки, затем с питанием обоих обмоток. При таком управлении количество шагов увеличивается в двое по сравнению с другими методами управления.

Полушаговое биполярное управление шаговым двигателем
Гибридный шаговый двигатель был создан с целью объединить лучшие свойства обоих шаговых двигателей: реактивного и с постоянными магнитами, что позволило добиться меньшего угла шага. Ротор гибридного шагового двигателя представляет из себя цилиндрический постоянный магнит, намагниченный вдоль продольной оси с радиальными зубьями из магнитомягкого материала.

Конструкция гибридного шагового двигателя (осевой разрез)
Статор обычно имеет две или четыре фазы распределенные между парами явно выраженных полюсов. Обмотки статора могут иметь центральное ответвление для униполярного управления. Обмотка с центральным ответвлением выполняется с помощью бифилярной намотки.

Гибридный шаговый двигатель (радиальный разрез)
Заметьте что 48 зубьев на одной секции ротора смещены на половину зубцового деления λ относительно другой секции (рисунок ниже). Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.

Ротор гибридного шагового двигателя
Зубья на полюсах статора соответствуют зубьям ротора, исключая отсутствующие зубья в пространстве между полюсами. Таким образом один полюс ротора, скажем южный полюс, можно выровнять со статором в 48 отдельных положениях. Однако зуб южного полюса ротора смещен относительно северного зуба на половину зубцового деления. Поэтому ротор может быть выставлен со статором в 96 отдельных положениях.
Соседние фазы статора гибридного шагового двигателя смещены друг относительно друга на одну четверть зубцового деления λ. В результате ротор перемещается с шагом в четверть зубцового деления во время переменного возбуждения фаз. Другими словами для такого двигателя на один оборот приходится 2×96=192 шага.
- Шаговый гибридный двигатель имеет:
- шаг меньше, чем у реактивного двигателя и двигателя с постоянными магнитами;
- ротор – постоянный магнит с тонкими зубьями. Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага;
- полюсы статора имеют такие же зубья как и ротор;
- статор имеет не менее чем две фазы;
- зубья соседних полюсов статора смещены на четверть зубцового деления для создания меньшего шага.
Шаговый привод
Шаговый привод
Шаговый привод – это мехатронное устройство, которое преобразует электрические импульсы в дискретные механические перемещения.
Шаговый привод, как правило, состоит из двух основных составляющих частей. Это, так называемый, драйвер, принимающий импульсы от устройства управления верхнего уровня и формирующий напряжение питания шагового двигателя. И, во-вторых, это шаговый двигатель, вал которого, в зависимости от поданного на него напряжения питания, поворачивается на строго определенный, небольшой угол в ту или другую сторону.
Устройства управления верхнего уровня (контроллеры шагового привода) формируют импульсные сигналы для точного управления драйверами шаговых двигателей и шаговыми двигателями в зависимости от управляющей программы, записанной, например, в память этого управляющего устройства.
На рисунках ниже представлен внешний вид шагового двигателя с выступающим валом и внешний вид драйвера шагового привода на примере драйвера производства фирмы Autonics.
Контроллер шагового привода может иметь вид, представленный на рисунке ниже.
Принцип работы шагового двигателя можно объяснить следующим образом. Допустим имеются два электромагнитных контура (см. рисунок ниже), между которыми расположен постоянный магнит. Магнит может вращаться вокруг оси, перпендикулярной направлениям магнитных линий этих контуров. Представим себе, что выключатель В замыкается. В этом случае, в синем контуре образуется магнитное поле, направление которого можно определить по «правилу буравчика». Взаимодействие поля постоянного магнита и поля, от протекания электрического тока, приведет к повороту магнита на угол 90° по часовой стрелке. После такого шагового движения ротор этого двигателя остановится в вертикальном положении. Чтобы ротору совершить следующий шаг необходимо выключатель В разомкнуть, а выключатель А’ – замкнуть. При этом ротор опять займет горизонтальное положение, но теперь южный полюс постоянного магнита будет слева. Ротор опять замрет в таком состоянии до момента прихода следующего токового импульса. Последовательная активация обмоток B’, A, B, A’ и т.д. двигателя вызывает дискретные угловые перемещения (шаги) ротора.
Наличие постоянного магнита на роторе шагового двигателя не обязательно. Ниже представлена схема конструкции шагового двигателя, где ротор выполнен из магнитомягкого материала. Здесь, подавая импульсы тока на обмотки полюсов статора, можно заставить ротор совершать шаговые движения от одного полюса статора к другому.
Как правило, промышленные шаговые двигатели имеют гибридную конструкцию и сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Конструктивно шаговые электродвигатели состоят из статора, на котором расположены обмотки возбуждения, и ротора. Статор гибридного двигателя имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки.
Обычно используются 8 основных полюсов для двигателей с полным шагом 1.8 угловых градуса. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора. Это происходит из-за соответствующего расположения зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.
Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Ротор разделен на две части, между которыми расположен цилиндрический постоянный магнит. Таким образом, зубцы одной половинки ротора являются северными полюсами, а зубцы второй половинки – южными. Кроме того, половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи.
В машиностроении распространение получили высокомоментные двухфазные гибридные шаговые электродвигатели с угловым перемещением 1,8°/шаг (200 шагов/оборот) или при использовании половинного шага – 0,9°/шаг (400 шагов/оборот).
Дискретность шага создаёт существенные вибрации, которые в ряде случаев могут приводить к снижению крутящего момента и возбуждению механических резонансов в системе. Уровень вибраций удаётся снижать при использовании режима дробления шага или при увеличении количества фаз с двух до пяти. Поэтому пятифазные шаговые двигатели получили распространение в высокоточных системах приводов подач станочного оборудования.
Режим дробления шага (микрошаг) реализуется при совместном управлении током в разных обмотках шагового электродвигателя. Управляя соотношением токов в обмотках можно зафиксировать ротор в промежуточном положении между шагами. Таким образом, можно повысить плавность вращения ротора и точность позиционирования.
При осуществлении каждого шага ротор не сразу останавливается в новом положении равновесия, а осуществляет затухающие колебания вокруг этого положения. Время переходного процесса в большой степени зависит от характеристик нагрузки. Во многих приложениях такие колебания являются нежелательными. Микрошаговый режим позволяет в значительной степени эти колебания. На рисунке ниже показаны перемещения ротора при работе в полношаговом и микрошаговом режимах.
Шаговые электродвигатели применяются в приводах машин и механизмов, работающих в старт-стопном режиме, или в приводах непрерывного движения, где управляющее воздействие задаётся последовательностью электрических импульсов, например, в станках с ЧПУ. Шаговые приводы позволяют получать точное позиционирование без использования обратной связи от датчиков углового положения.
Главное преимущество шаговых приводов – простота при высокой точности. При подаче потенциалов на обмотки шаговый двигатель повернется строго на определенный угол. К преимуществам можно отнести стоимость шаговых приводов, которые значительно дешевле сервоприводов с обратной связью.
Основной недостаток – в возможности «потери шагов» ротора. Это наиболее известная проблема этих двигателей. Потеря шагов может произойти при большой нагрузке на валу, большом ускорении старта или торможения, при резонансных явления в системе, где установлен шаговый привод.
Как один из способов, избежать «потери шагов», можно предложить увеличить мощность шагового двигателя.
Основные характеристики шагового двигателя – это удерживающий момент (синхронизирующий момент, “max. holding torque”) и предельная частота следования импульсов. Единицы измерения удерживающего момента шагового двигателя: кГс×см или Н×м. Он определяет тот максимальный момент нагрузки при нулевой скорости, прилагаемый к валу двигателя, после превышения которого шаговый двигатель «опрокидывается», то есть неконтролируемо теряет свое угловое положение. Величина удерживающего момента, приводимая в спецификации, соответствует номинальному току через обмотки двигателя. Рабочий момент в системе должен быть в несколько раз меньше этой предельной характеристики.
Предельная частота следования импульсов, при которой возможен пуск и остановка двигателя без потери шага, называется приемистостью шагового привода. Следует помнить, что с увеличением частоты вращения шагового двигателя значительно падает момент, который может развить этот двигатель. Зависимость развиваемого момента и частоты следования импульсов, как правило, приводятся производителями шаговых двигателей. Пользователю всегда следует обращать внимание на данные частотные характеристики.
Одно из главных отличий современного станка с ЧПУ от «классических» моделей с ручным управлением – отсутствие кинематической связи между механизмами, отвечающими за перемещение рабочих органов и вращение шпинделя. Раздельный привод позволяет отказаться от использования многоступенчатых коробок передач, механических делительных головок, доверить сложные расчеты компьютеру. Но чтобы перемещения были точными, а станок всегда понимал, в какой точке находится режущий инструмент в текущий момент времени, привод должен иметь вполне определенные параметры. В механизмах станка с ЧПУ лучше всего с этими задачами справляются шаговые двигатели: компактные «послушные» в управлении и сравнительно недорогие.
В этой статье мы расскажем о работе этих устройств, постараемся найти их недостатки и подобрать альтернативные варианты.

Как работает шаговый двигатель?
Наиболее важная конструктивная особенность шагового двигателя – явно выраженные магнитные полюса. На статоре их роль играют сердечники обмоток. Ротор выглядит как зубчатое колесо: выступы на его поверхности – это тоже полюса (постоянных магнитов). Благодаря такой конструкции шаговый двигатель способен совершать дискретные угловые перемещения с остановкой в определенном положении. Связанный с ним через передачу винт-гайка узел станка совершает заданное линейное перемещение.
Управляющий сигнал для шагового двигателя представляет собой последовательность импульсов. Их количество кратно числу шагов, которые совершает ротор. Система управления станка знает, сколько импульсов было послано на двигатель, и может посчитать текущее положение исполнительного механизма.
Достоинства и недостатки
У шаговых двигателей обширный перечень преимуществ. Самые важные из них:
- Доступная стоимость. Такие приводы применяются не только в промышленных станках, но и в бытовой технике. Например, на маломощные самодельные станки часто устанавливают шаговые двигатели, снятые с принтеров.
- Надежность. Благодаря отсутствию щеток и применению подшипников с избыточным рабочим ресурсом вывести из строя шаговый двигатель достаточно сложно. Перегрузки приводят к пропуску шагов, но не повреждают двигатель.
- Высокая скорость отклика на управляющий сигнал. Старт, торможение и реверсирование происходят практически мгновенно из-за того, что максимальный момент двигатель развивает при скоростях, близких к нулю.
Есть у таких приводов и недостатки:
- На обмотках двигателя всегда есть напряжение, то есть он постоянно потребляет энергию.
- Крутящий момент зависит от частоты вращения, и на высоких скоростях он значительно падает.
- Эффект резонанса — падение момента на некоторых частотах вращения. При чем резонансная частота непостоянна и зависит от величины нагрузки.
- При пропуске шагов система ЧПУ не сможет правильно определить положение исполнительного механизма, если шаговый привод работает без обратной связи.
Типы шаговых приводов
Существует два типа шаговых приводов:
- Униполярные. Обмотки статора имеют от 5 до 8 выводов. Двигатель включается в работу посредством их коммутации при помощи простейшего драйвера с четырьмя ключами.
- Биполярные. В таком моторе всего 4 вывода, и для изменения параметров магнитного поля им нужна более сложная система управления.
Биполярные двигатели развивают большие моменты на валу, чем униполярные, при сравнимых массово-габаритных характеристиках, поэтому их в станках с ЧПУ можно увидеть значительно чаще.

Как выбрать шаговый двигатель для ЧПУ станка?
Самостоятельный выбор шагового двигателя для ЧПУ станка привода — работа сложная и требующая точных расчетов. Он должен преодолеть силу трения в ШВП или передаче винт-гайка, инерцию портала и рабочую нагрузку, которая зависит от свойств обрабатываемой детали и режима резания. Также нужно учесть геометрические параметры присоединительного фланца, вала и корпуса. Важный момент – анализ графика зависимости крутящего момента от частоты вращения. Именно здесь ошибки приводят к пропуску шагов.
Тем, кто все же решился собрать станок самостоятельно, мы рекомендуем посмотреть характеристики приводов готовых моделей, близких по размерам и поставленным задачам.
Альтернативные варианты
Единственный конкурент шагового двигателя в ЧПУ станке — сервомотор. Его установка требует реализации более сложной схемы управления с обратной связью (энкодером). Есть у него и другие недостатки. Выбор между сервоприводом и шаговым двигателем для ЧПУ станка вызывает много вопросов у начинающих станочников и споров на форумах. Чтобы определить оптимальный состав привода, нужно учесть следующие факторы:
- Стоимость. При жестких ограничениях в бюджете широкий выбор отсутствует в принципе, и считается, что шаговый двигатель значительно дешевле сервомотора. Но это справедливо для устройств небольших типоразмеров. Чем больше мощность, тем меньше разница в цене, а у некоторых крупных моделей стоимость моторов обоих типов сопоставима.
- Массово-габаритные характеристики станка. Чем больше станок, тем большая мощность нужна для перемещения рабочих органов. Склонность к резонансным явлениям сильнее проявляется у мощных шаговых двигателей, что может привести к пропуску шагов и снижению точности обработки. Для фрезерных станков с ЧПУ рекомендуется выбирать серводвигатели, если масса портала превышает 50 кг.
- Сложность настройки. Схемы приводов с обратной связью требуют точной наладки и высокой квалификации оператора. Если требуется самое простое решение, оптимальным выбором для станка с ЧПУ будет шаговый двигатель.
- Вероятность перегрузок и заклинивания. Считается, что при заклинивании серводвигатель обязательно выйдет из строя. Это не совсем так. Если станок настроен правильно, драйвер не пошлет сигнал на повторную отработку перемещения, выполнение программы прекратится, и стойка перейдет в режим ожидания до вмешательства оператора или наладчика. Шаговые двигатели при перегрузке могут пропустить несколько шагов. Из-за отсутствия обратной связи СЧПУ не узнает об этом и продолжит отсчитывать шаги дальше. Пропуск нескольких шагов при кратковременном заклинивании – это бракованная деталь на выходе. Потеря шагов также возможна при внешних вибрационных воздействиях и ударах.
- Скорость перемещения. В массивных ЧПУ станках с шаговыми двигателями скорость движения портала обычно не превышает 9 м/мин. Если материал заготовки и режущий инструмент позволяют назначить режим обработки на более высоких скоростях, то мотор будет «узким местом», ограничивающим производительность. Тот же портал с приводом от серводвигателя аналогичного типоразмера сможет развить скорость до 60 м/мин.
- Рабочие ускорения. Чрезмерный разгон шагового двигателя неизбежно приведет к пропуску шагов. Если предполагается работа на высоких ускорениях, лучше выбрать сервомотор.
- Нагрузка на передачу в момент остановки. В тяжелых станках с ЧПУ шаговые двигатели часто устанавливают на механизмы вертикального перемещения шпинделя. Ротор затормаживается магнитными силами после остановки. Сервопривод в остановленном положении совершает колебания, что очень нежелательно. Шаговый двигатель хорошо ведет себя в механизмах поворота заготовки (4-ой оси), кода требуется удерживать ее в стационарном положении.

Какие двигатели применяются в станках MULTICUT?
Надежность конструкции – основной критерий, по которому инженеры компании MULTICUT оценивают комплектующие для станков от сторонних производителей. В выборе двигателей для механизмов перемещения не допускаются компромиссы в качестве.
По умолчанию на все станки устанавливаются шаговые приводы MIGE и контроллеры YAKO. Базовая комплектация выбрана исходя из пожеланий заказчиков и анализа оборудования конкурентов. Приводы демонстрируют высокие крутящие моменты и динамику. Станок стабильно работает на ускорениях до 1,5 м/с2. Двигатели работают в микрошаговом режиме с точностью 300 шагов на оборот. В сочетании с редуктором с передаточным отношением 5 аппаратная точность позиционирования составляет 6 мкм. «Шаговость» никак не отражается даже на самых мелких деталях.
В качестве опции заказчику предлагаются сервоприводы DELTA серии ASDA-B2. Эти двигатели отличаются отличной управляемостью: положение, момент и скорость могут регулироваться сигналом задания. По динамическим характеристикам эти моторы значительно превосходят более дорогие аналоги. Разгон от -3000 до + 3000 оборотов в минуту на холстом перемещении составляет около 10 мс. В тех моделях, которые мы устанавливаем на станки, есть тормозной резистор. В энкодер с разрешением 160000 импульсов на оборот встроен цифровой модуль управления, который позволяет оперативно выполнить конфигурирование мотора.
Если станок рассчитан на работу в высоконагруженных режимах, от него требуется хорошая производительность, то мы рекомендуем выбирать сервоприводы ESTUN. Интеллектуальные силовые модули промышленного класса, используемые в конструкции двигателей, позволяют им выдерживать перегрузки по току, развивать высокие моменты во время пуска. Производитель реализовал функцию подавления вибрации, сделал настройку простой и удобной, а двигатель — отзывчивым и точным в работе.
На настольные станки 500-й серии мы устанавливаем привода мощностью 200 Вт (на каждую ось). В базовой комплектации крупногабаритных моделей мощность шаговых двигателей составляет 400 Вт. Для всех серий станков в сервоисполнении мы предлагаем моторы мощностью 0,75 и 1 кВт.
Чтобы получить консультации по вопросам выбора и комплектации станков MULTICUT, позвоните по контактному телефону в вашем регионе.
Введение в устройство шаговых двигателей
Если вы когда-либо имели удовольствие демонтировать старый принтер, чтобы сохранить электронные компоненты, то можете столкнуться с множеством цилиндрических загадочных моторов с 4 или более проводами, выступающими из сторон. Возможно, вы слышали характерное жужжание настольного 3D-принтера или глючную электромеханическую симфонию дисков в CD приводе? Если так, то вы столкнулись с шаговым двигателем!
Шаговые двигатели заставляют электромеханический мир вращаться ( с более высоким крутящим моментом!), но в отличие от обычного двигателя постоянного тока, управление шаговым двигателем требует чуть больше, чем ток через два провода. В этой статье будет рассказано о теории проектирования и эксплуатации шагового двигателя. Как только рассмотрим основы, автор данного руководства покажет, как построить простые схемы для управления шаговыми двигателями, а затем как использовать специальные микросхемы драйверов.
Шаг 1: Что делает мотор шаговым двигателем?
Кому может понадобиться более двух проводов и Н-мост? Зачем? Ну, в отличие от обычных щеточных двигателей постоянного тока, построенных для максимального числа оборотов (или кВ для RC), шаговые двигатели представляют собой бесщеточные двигатели, рассчитанные на высокий крутящий момент (впоследствии меньшую скорость) и более точное вращательное движение. В то время как типичный двигатель постоянного тока отлично подходит для вращения гребного винта на высокой скорости для достижения максимальной тяги, шаговый двигатель лучше подходит для прокатки листа бумаги синхронно со струйным механизмом внутри принтера или для осторожного вращения вала линейного рельса в мельнице с ЧПУ.
Внутри шаговые двигатели являются более сложными, чем простой двигатель постоянного тока, с несколькими катушками вокруг сердечника с постоянными магнитами, но с этой дополнительной сложностью обеспечивается больший контроль. Благодаря тщательному расположению катушек, встроенных в статор, ротор шагового двигателя может вращаться с заданным шагом, изменяя полярность между катушками и переключая их полярность в соответствии с установленной схемой зажигания. Шаговые двигатели не все сделаны одинаковыми, и для их внутреннего исполнения требуются уникальные (но базовые) схемы. Обсудим наиболее распространенные типы шаговых двигателей на следующем шаге.
Шаг 2: Типы шаговых двигателей

Есть несколько различных конструкций шаговых двигателей. К ним относятся однополярное, биполярное, универсальное и переменное сопротивление. Мы будем обсуждать конструкцию и работу биполярных и однополярных двигателей, так как это наиболее распространенный тип двигателя.
Однополярный двигатель
У однополярных двигателей обычно есть пять, шесть или восемь проводных выводов, идущих от основания, и одна катушка на фазу. В случае пятипроводного двигателя пятый провод представляет собой соединенные центральные отводы пар катушек. В шестипроводном двигателе каждая пара катушек имеет собственный центральный отвод. В двигателе с восемью проводами каждая пара катушек полностью отделена от других, что позволяет подключать ее в различных конфигурациях. Эти дополнительные провода позволяют приводить в действие однополярные двигатели непосредственно от внешнего контроллера с простыми транзисторами, чтобы управлять каждой катушкой отдельно. Схема зажигания, в которой приводится в действие каждая катушка, определяет направление вращения вала двигателя. К сожалению, учитывая, что за один раз подается только одна катушка, удерживающий момент однополярного двигателя всегда будет меньше, чем у биполярного двигателя того же размера. Обойдя центральные отводы однополярного двигателя, он теперь может работать как биполярный двигатель, но для этого потребуется более сложная схема управления. На четвертом шаге этой статьи мы приведем в действие однополярный двигатель, который должен прояснить некоторые из представленных выше концепций.
Биполярный двигатель
Биполярные двигатели, как правило, имеют четыре провода и являются более прочными, чем однополярный двигатель сравнительного размера, но поскольку у нас есть только одна катушка на фазу, нам нужно повернуть ток через катушки, чтобы перейти на один шаг. Наша потребность изменить ток означает, что мы больше не сможем управлять катушками напрямую с помощью одного транзистора, вместо этого – полная цепь h-моста. Построение правильного h-моста утомительно (не говоря уже о двух!), Поэтому мы будем использовать выделенный драйвер биполярного двигателя (см. Шаг 5).
Шаг 3: Понимание спецификаций шагового двигателя
Давайте поговорим о том, как определить технические характеристики двигателя. Если вы встречали двигатель квадратного сечения с определенной сборкой из трех частей (см. Рисунок три), скорее всего, это двигатель NEMA. Национальная ассоциация производителей электрооборудования имеет определенный стандарт для спецификаций двигателя, использующий простой буквенный код для определения диаметра лицевой панели двигателя, типа крепления, длины, фазного тока, рабочей температуры, фазного напряжения, шагов на оборот и проводки.
Чтение паспорта двигателя
Для следующего шага будет использован этот однополярный мотор. Выше приложена таблица данных. И хотя она краткая, она предоставляет нам все, что нам нужно для правильной работы. Давайте разберем, что в списке:
Фаза: это четырехфазный однополярный мотор. Внутренне двигатель может иметь любое количество реальных катушек, но в этом случае они сгруппированы в четыре фазы, которые могут управляться независимо.
Шаг угла: При приблизительном разрешении 1,8 градусов на шаг мы получим 200 шагов на оборот. Хотя это является механическим разрешением, с помощью микроперехода мы можем увеличить это разрешение без каких-либо изменений двигателя (подробнее об этом в шаге 5).
Напряжение: номинальное напряжение этого двигателя составляет 3 вольта. Это функция тока и номинальных сопротивлений двигателя (закон Ома V = IR, следовательно, 3V = 2A * 1,5Ω)
Ток: сколько тока нужно этому двигателю? Два ампера на фазу! Эта цифра будет важна при выборе наших силовых транзисторов для базовой схемы управления.
Сопротивление: 1,5 Ом на фазу ограничит то, какой ток мы можем подать на каждую фазу.
Индуктивность: 2,5 мГн. Индуктивная природа катушек двигателя ограничивает скорость зарядки катушек.
Удерживающий момент: это то, сколько фактической силы мы можем создать, когда на шаговый двигатель подано напряжение.
Момент удержания: это то, какой момент удержания мы можем ожидать от двигателя, когда он не находится под напряжением.
Класс изоляции: класс B является частью стандарта NEMA и дает нам рейтинг в 130 градусов Цельсия. Шаговые двигатели не очень эффективны, и постоянное потребление максимального тока означает, что они будут сильно нагреваться при нормальной работе.
Показатели обмотки: диаметр провода 0,644 мм., количество витков в диаметре 15,5, сечение 0,326 мм2
Определение пар катушек
Хотя сопротивление обмоток катушки может варьироваться от двигателя к двигателю, если у вас есть мультиметр, вы можете измерить сопротивление на любых двух проводах, если сопротивление
Шаг 4: Непосредственное управление шаговыми двигателями

Благодаря расположению проводов в однополярном двигателе мы можем последовательно включать катушки, используя только простые силовые полевые МОП-транзисторы. На рисунке выше показана простая схема с МОП-транзистором. Такое расположение позволяет просто контролировать уровень логики с помощью внешнего микроконтроллера. В этом случае легче всего использовать плату Intel Edison с коммутационной платой в стиле Arduino, чтобы получить легкий доступ к GPIO (однако подойдет любой микро с четырьмя GPIO). Для этой схемы используется транзистор IRF510 N-канальный мощный MOSFET. IRF510, способный потреблять до 5,6 ампер, будет иметь достаточно свободной мощности, чтобы удовлетворить потребности двигателя в 2 амперах. Светодиоды не нужны, но они дадут вам хорошее визуальное подтверждение последовательности работы. Важно отметить, что IRF510 должен иметь логический уровень не менее 5 В, чтобы он мог потреблять достаточный ток для двигателя. Мощность двигателя в этой цепи будет 3 В.
Последовательность работы
Полное управление однополярным двигателем с помощью этой настройки очень простое. Для того, чтобы вращать двигатель, нам нужно включить фазы в заданном режиме, чтобы он вращался правильно. Чтобы вращать двигатель по часовой стрелке, мы будем управлять фазами следующим образом: A1, B1, A2, B2. Чтобы вращать против часовой стрелки, мы просто изменим направление последовательности на B2, A2, B1, A1. Это хорошо для базового контроля, но что, если вы хотите большей точности и меньше работы? Давайте поговорим об использовании выделенного драйвера, чтобы сделать всё намного проще!
Шаг 5: Платы драйверов шаговых двигателей

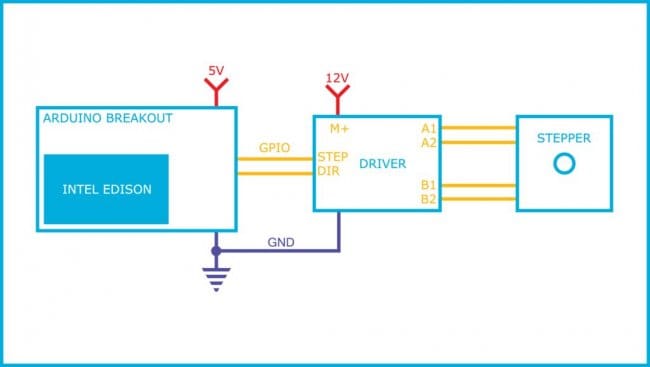
Если вы хотите приступить к управлению биполярными двигателями (или однополярными двигателями в биполярной конфигурации), вам нужно взять специальную плату управления драйвером. На фото выше изображен драйвер Big Easy Driver и плата-носитель драйвера шагового двигателя A4988. Обе эти платы являются печатными платами для микрошагового двухполюсного драйвера шагового двигателя Allegro A4988, который на сегодняшний день является одним из наиболее распространенных чипов для привода небольших шаговых двигателей. Помимо наличия необходимых двойных h-мостов для управления биполярным двигателем, эти платы дают много возможностей для крошечной недорогой упаковки.
Монтаж
Эти универсальные платы имеют удивительно низкое соединение. Вы можете начать управлять двигателем, используя только три соединения (только два GPIO) с вашим главным контроллером: общее заземление, шаг и направление. Ступенчатый шаг и его направление остаются плавающими, так что нужно привязать их к опорному напряжению с нагрузочным резистором. Импульс, посылаемый на вывод STEP, будет перемещать двигатель на один шаг с разрешением в соответствии с эталонными выводами микрошага. Логический уровень на выводе DIR определяет, будет ли двигатель вращаться по часовой стрелке или против часовой стрелки.
Микрошагование двигателя
В зависимости от того, как установлены выводы M1, M2 и M3, вы можете добиться увеличения разрешения двигателя с помощью микрошагования. Микрошаг включает в себя посылку разнообразных импульсов, чтобы тянуть двигатель между электромагнитным разрешением физических магнитов в роторе, обеспечивая очень точное управление. A4988 может перейти от полного шага до разрешения шестнадцатого шага. С нашим двигателем 1,8 градуса это обеспечит до 3200 шагов за оборот. Поговорим о мелких деталях!
Коды / Библиотеки
Подключение двигателей может быть легким, но как насчет управления ими? Посмотрите эти готовые библиотеки кода для управления шаговыми двигателями:
Stepper – классика, встроенная в Arduino IDE, позволяет выполнять базовый шаг и управление скоростью вращения.
AccelStepper – гораздо более полнофункциональная библиотека, которая позволяет лучше управлять несколькими двигателями и обеспечивает правильное ускорение и замедление двигателя.
Intel C ++ MRAA Stepper – библиотека более низкого уровня для тех, кто хочет углубиться в управление необработанным шаговым двигателем C ++ с помощью Intel Edison.
Этих знаний должно быть достаточно, чтобы вы поняли как работать с шаговыми двигателями в электромеханическом мире, но это только начало. 
Источник (Source)
Обновлено: 31.05.2020
В качестве электропривода порталов и исполнительных узлов фрезерно-гравировальных станков с чпу и оборудования для плазменной резки с ЧПУ применяются шаговые двигатели и сервоприводы. Что лучше: шаговый двигатель или сервопривод, и в каких случаях применение того или иного электропривода экономически и технически оправданно, рассмотрим в данной статье.

Устройство шагового привода
Шаговый привод состоит из синхронной электрической машины и управляющего контроллера. Последний обеспечивает подачу управляющих сигналов на обмотки двигателя и их попеременное включение в соответствии с заданной программой.

Шаговый двигатель — электрическая машина, преобразующая управляющие сигналы в перемещение вала на определенный угол и фиксацию его в заданном положении. Количество шагов таких электродвигателей составляет от 100 до 400, угол шага — от 0,9-3,6°.
Принцип работы шагового двигателя
Состоит это электромеханическое устройство из статора, где размещены катушки возбуждения, и вращающейся части с постоянными магнитами или обмотками. Такая конструкция ротора обеспечивает его фиксацию после отработки управляющей команды.
На статоре расположено несколько обмоток. При подаче напряжения на катушку, под воздействием магнитного поля ротор поворачивается на определенный угол в соответствии с пространственным положением обмотки. При ее обесточивании и подаче управляющего сигнала на другую катушку вращающаяся часть электродвигателя занимает другую позицию. Каждый поворот вала соответствует углу шага. При обратной последовательности подачи напряжения на катушки ротор вращается в противоположном направлении.
Для поворота ротора на меньший угол одновременно включаются 2 обмотки. Количество шагов ограничено и зависит от числа полюсов статора электромотора. Для обеспечения плавного вращения ротора на катушки статора подают разные токи, разность которых определяет положение ротора. Такой способ управления позволяет снизить дискретность и увеличить количество шагов до 400.
К числу недостатков шаговых двигателей можно отнести довольно низкую скорость, пропуск шагов при высокой (выше расчетной) нагрузке на валу, снижение момента при высокой частоте вращения и большое время разгона.
Устройство сервопривода
Сервопривод состоит из синхронного двигателя, датчика скорости и положения, а также управляющего контроллера. Основная разница между шаговым двигателем и сервоприводом состоит в наличии обратной связи по положению, скорости, моменту на валу ротора.
Электропривод такого типа построен на базе следящей схемы автоматического регулирования. При несоответствии скорости или другой величины контроллер будет подавать сигналы на отработку, пока требуемый параметр или положение вала не будет соответствовать заданному. В качестве датчика обратной связи используют абсолютные и относительные энкодеры различных типов и конструкций.

Принцип действия сервопривода
Управляющее устройство в соответствии с заданной программой подает напряжение на сервопривод, который соединен с порталом станка. Двигатель перемещает рабочий орган. При этом энкодер вырабатывает импульсы, поступающие на контроллер. Подсчет их числа осуществляет управляющее устройство. Количество импульсов пропорционально перемещению портала. При достижении рабочим органом заданного положения на электромотор перестает поступать напряжение. Портал фиксируется. Пока число импульсов, зафиксированных контроллером с датчика, не достигнет запрограммированной величины, двигатель будет осуществлять перемещение рабочего органа.
Шаговый сервопривод можно также настроить на поддержание постоянной частоты вращения вне зависимости от нагрузки или постоянного момента при разной скорости.
К достоинствам сервоприводов относятся точность позиционирования, динамика разгона и отсутствие снижения момента при высоких скоростях. Ограничивает применение сервопривода, как правило, достаточно большая стоимость.
Чем отличается сервопривод от шагового двигателя?
| Критерий сравнения | Шаговые двигатели | Сервоприводы |
|---|---|---|
| Эксплуатационный ресурс | Шаговые электромоторы не имеют коллекторного узла, подверженного износу. Также они не имеют частей, нуждающихся в регулярном техобслуживании и замене | Коллекторные серводвигатели необходимо регулярно обслуживать. Максимальный срок службы коллекторного узла — 5000 часов непрерывной работы. При этом бесщеточные сервомоторы не уступают в надежности шаговым двигателям |
| Точность перемещений исполнительного органа |
Современные шаговые электродвигатели обеспечивают перемещение рабочей части с точностью до 0,01 мм. Отличие шагового двигателя от сервопривода заключается в пропуске шагов при высокой (выше расчетной) нагрузке, что значительно снижает качество обработки |
Сервопривод для поворотного стола фрезерного станка или портала другого оборудования обеспечивает точность до 0,002 мкм. Позиционирование по следящей схеме обеспечивает высокое качество обработки независимо от нагрузки |
| Время разгона и скорость перемещения портала |
Максимальная скорость перемещения рабочих органов при использовании шагового электропривода — 25 м. Время разгона — 120 об/мин за секунду |
Сервопривод может перемещать портал со скоростью более 60 м/мин. Время разгона составляет до 1000 об/мин за 0,2 секунды |
| Реакция на принудительную остановку | Шаговые двигатели хорошо переносят механические перегрузки и не выходят из строя при аварийных остановках | Сервоприводы необходимо оснащать дополнительной защитой, отключающей электромотор при принудительной остановке портала. В противном случае обмотки электрической машины могут сгореть |
| Стоимость | За счет простоты конструкции шаговый двигатель имеет относительно невысокую цену | За счет датчиков обратной связи (энкодеров) и более сложной схемы регулирования сервопривод считается дорогостоящим оборудованием |
Критерии выбора
Тип приводного двигателя для станков выбирают по следующим характеристикам:
-
Производительность.
По этому параметру сервоприводы значительно превосходят шаговые электромоторы. На станок с ЧПУ для обработки крупных деталей или заготовок из твердых материалов лучше уставить сервомотор, например, ESTUN 1000 Вт. Такой электропривод обеспечит более высокую скорость обработки твердых материалов. Для малогабаритного промышленного оборудования (например, настольного фрезерного станка) среднего класса точности, предназначенного для обработки мягких материалов, лучше выбрать шаговый двигатель.
-
Эксплуатационные расходы.
Программирование и настройка сервопривода на станке с ЧПУ требуют высокой квалификации исполнителя. Такой привод намного дороже в обслуживании, соответственно расходы на его эксплуатацию будут выше.
-
Точность.
Сервоприводы для станков с ЧПУ необходимы для высокоточной автоматизированной обработки. Такой привод позволяет позиционировать положение рабочего органа с точностью до 0,02 мкм, в то время как максимальная точность шаговой электрической машины — 0, 01 мм.
-
Цена.
Стоимость шагового двигателя значительно ниже цены сервопривода. При невысоком бюджете лучше предпочесть первый вариант.
-
Уровень шума.
По этому показателю сервомоторы предпочтительней. Работа шаговых электродвигателей сопровождается звуком, соответствующим частоте шагов на различных оборотах.
Таким образом, выбор сервопривода или шагового двигателя в качестве привода на фрезерно-гравировальный станок и оборудование для плазменной резки следует совершать, руководствуясь исключительно экономической и технической целесообразностью.
Читайте также

Обновлено: 18 Января 2019
Для построения и развития успешного бизнеса, связанного с работой на фрезерном станке с ЧПУ, важно наличие значительных преимуществ перед конкурентами: например, высочайшего качества продукции и доступных цен. В данной статье расскажем, какие именно станки с ЧПУ подходят для малого бизнеса, какова стоимость того или иного оборудования, и насколько рентабелен такой вид деятельности…

Обновлено: 18 Января 2019
Станки с ЧПУ значительно повлияли на сферу металлообработки и на работу с другими материалами. Программируемые установки обеспечиваюют повышенную точность фрезеровки, что приводит к значительному увеличению производительности труда. Процесс обработки заготовок проходит беспрерывно и в строгом соответствии заданной программе, а результат работы отличается высокой точностью. В статье мы рассмотрим важнейшие технические характеристики фрезерных станков с ЧПУ и основные сферы их применения…

Обновлено: 18 Января 2019
Рабочий режущий инструмент станков с ЧПУ — это фреза. Конструктивно она является вращающейся деталью с заточенными зубьями. Фрезы для станков с ЧПУ по дереву производят из разных сплавов и делят на категории. Их выбор зависит от характеристик обрабатываемой поверхности, типа работы и степени твердости древесины. Правильно выбрать подходящий инструмент для программных станков поможет наша статья, которая познакомит вас с типами фрез и их назначением…

Обновлено: 6 Декабря 2018
Шаговое устройство — бесщеточный двигатель с несколькими обмотками, функционирующий по синхронному принципу. Принцип работы шагового двигателя заключается в поочередной активации обмоток, которые обеспечивают вращение / остановку ротора…

Обновлено: 6 Декабря 2018
Современные сверлильные станки с ЧПУ используются на производствах, на которых в больших объемах осуществляется обработка деталей всевозможного назначения, например, на мебельных фабриках. Сегодня производители предлагают покупателям модели сверлильных станков с ЧПУ во всем функциональном многообразии…
Основы шагового двигателя
Каждый двигатель преобразует мощность. Электродвигатели преобразуют электричество в движение. Шаговые двигатели преобразуют электричество во вращение. Мало того, что шаговый двигатель преобразует электроэнергию во вращение, он также может очень точно контролировать, насколько он будет вращаться и как быстро.
Шаговые двигатели названы так потому, что каждый импульс электричества вращает двигатель на один шаг. Шаговые двигатели управляются драйвером, который посылает импульсы в двигатель, заставляя его вращаться.Количество импульсов оборотов двигателя равно количеству импульсов, подаваемых в привод. Двигатель будет вращаться со скоростью, равной частоте тех же импульсов.
Шаговые двигатели очень просты в управлении. Большинство драйверов ищут импульсы на 5 вольт, которые как раз и являются уровнем напряжения большинства интегральных схем. Вам просто нужно спроектировать схему для вывода импульсов или использовать один из генераторов импульсов ORIENTAL MOTOR.
Одной из самых замечательных особенностей шаговых двигателей является их способность очень точно позиционировать.Это будет подробно рассмотрено позже. Шаговые двигатели не идеальны, всегда есть небольшие неточности. Стандартные шаговые двигатели ORIENTAL MOTOR имеют точность ± 3 минуты дуги (0,05 °). Замечательная особенность шаговых двигателей, однако, состоит в том, что эта ошибка не накапливается от шага к шагу. Когда стандартный шаговый двигатель перемещается на один шаг, он идет на 1,8 ° ± 0,05 °. Если один и тот же двигатель проходит миллион шагов, он будет перемещаться на 1 800 000 ° ± 0,05 °. Ошибка не накапливается.
Шаговые двигатели могут быстро реагировать и ускоряться.Они имеют низкую инерцию ротора, которая может быстро набрать скорость. По этой причине шаговые двигатели идеально подходят для коротких и быстрых ходов.
Система шагового двигателя
На приведенной ниже схеме показана типичная система с шаговым двигателем. Все эти части должны присутствовать в той или иной форме. Производительность каждого компонента будет влиять на другие.
Первый компонент – это компьютер или ПЛК. Это мозги за системой. Компьютер не только управляет системой шагового двигателя, но также контролирует и остальную часть машины.Это может поднять лифт или продвинуть конвейер. Он может быть сложным, как ПК или ПЛК, или простым, как кнопка оператора.
Вторая часть – это индексатор или карта ПЛК. Это говорит шаговый двигатель, что делать. Он выдаст правильное количество импульсов, которые будет двигать двигатель, и изменит частоту, чтобы двигатель ускорялся, работал на скорости и затем замедлялся.
Это может быть отдельный компонент, такой как индексатор ORIENTAL MOTOR SG8030 или плата генератора импульсов, которая вставляется в ПЛК.Форма не имеет значения, но она должна присутствовать для движения двигателя.
Следующие четыре ящика составляют водитель мотора. Логика управления фазой берет импульсы от индексатора и определяет, какая фаза двигателя должна быть под напряжением. Фазы должны быть под напряжением в определенной последовательности, и логика для управления фазой заботится об этом. Блок питания логики является источником низкого уровня, который питает микросхемы в драйвере. Это зависит от набора микросхем или конструкции приложения, но большинство логических источников находятся в диапазоне 5 Вольт.Источник питания двигателя – это напряжение питания для питания двигателя. Этот уровень напряжения обычно находится в диапазоне 24 В постоянного тока, но может быть намного выше. Наконец, усилитель мощности – это набор транзисторов, который позволяет току возбуждать фазы. Они постоянно включаются и выключаются, чтобы двигать двигатель в правильной последовательности.
Все эти компоненты проинструктируют двигатель для перемещения нагрузки. Нагрузка может представлять собой ходовой винт, диск или конвейер.
Типы Шаговых Двигателей
В настоящее время существует три основных типа шаговых двигателей.
- Переменное сопротивление (VR)
- постоянный магнит (PM)
- гибрид
ORIENTAL MOTOR производит только гибридные шаговые двигатели.
Шаговые двигатели с переменным сопротивлением имеют зубцы на роторе и статоре, но без магнита. Поэтому он не имеет стопорный момента. У постоянного магнита есть магнит для ротора, но нет зубьев. Обычно, магнит ПМ имеет грубые углы шага, но у него есть стопорный момент.
Гибридные шаговые двигатели объединяют магнит от постоянного магнита и зубья от двигателей с переменным сопротивлением.Магнит аксиально намагничен, то есть на диаграмме справа верхняя половина – северный полюс, а нижняя – южный полюс. На магните находятся две зубчатые роторные чашки с 50 зубцами. Две чашки смещены на 3,6 °, поэтому, если мы посмотрим на ротор между двумя зубьями на чашке северного полюса, мы увидим один зуб на чашке южного полюса прямо посередине.
Эти двигатели имеют двухфазную конструкцию с 4 полюсами на фазу. Полюса на 90 ° друг от друга составляют каждую фазу.Каждая фаза намотана так, что полюс 180 ° имеет одинаковую полярность, в то время как эти 90 ° друг от друга – противоположная полярность. Если бы ток в этой фазе был обратным, изменилась бы и полярность. Это означает, что мы можем сделать любой полюс статора северным или южным полюсом.
Предположим, что на диаграмме полюсы в 12 и 6 часов являются северными полюсами, а полюсы в 3 и 9 часов – южными. Когда мы возбуждаем фазу А, 12 и 6 притягивают южный полюс магнитного ротора, а 3 и 9 притягивают северный полюс ротора.Если смотреть с одного конца, мы увидим, что зубья ротора выровнены с 12 и 6, в то время как зубцы с 3 и 9 будут посередине. Если бы мы смотрели с противоположного конца, зубья ротора северного полюса были бы точно выровнены с 3 и 9, в то время как зубья на 12 и 6 были бы посередине. В зависимости от того, в каком направлении мы хотим идти, мы будем заряжать либо полюса на 2 и 7 в качестве северных полюсов, либо полюса на 11 и 5 в качестве северных полюсов. Здесь драйвер необходим для определения чередования фаз.(Нажмите на изображение, чтобы начать анимацию).
На роторе 50 зубьев. Шаг между зубцами составляет 7,2 °. При движении двигателя некоторые зубья ротора не совпадают с зубцами статора на 3/4 шага зуба, 1/2 шага зубца и 1/4 шага зуба. Когда двигатель шагнет, он пойдет по самому простому маршруту, поскольку 1/4 из 7,2 ° составляет 1,8 °, двигатель перемещается на 1,8 ° каждый шаг.
Наконец, крутящий момент и точность зависят от числа полюсов (зубьев). Чем больше полюсов, тем лучше крутящий момент и точность.ORIENTAL MOTOR предлагает шаговые двигатели высокого разрешения. Эти двигатели имеют половину шага зуба нашего стандартного двигателя. Ротор имеет 100 зубьев, поэтому угол между зубцами составляет 3,6 °. Когда двигатель перемещается на 1/4 шага зуба, он движется на 0,9 °. Разрешение наших моделей с высоким разрешением вдвое выше, чем у стандартных моделей: 400 шагов на оборот против 200 шагов на оборот.
Меньшие углы шага означают более низкую вибрацию, поскольку мы не шагаем так далеко с каждым шагом.
Структура
На рисунке ниже показано поперечное сечение 5-фазного шагового двигателя.Шаговый двигатель состоит в основном из двух частей: статора и ротора. Ротор, в свою очередь, состоит из трех компонентов: чашки ротора 1, чашки ротора 2 и постоянного магнита. Ротор намагничен в осевом направлении, так что, например, если чашка 1 ротора поляризована на север, чашка 2 ротора будет поляризована на юг.
Статор имеет 10 магнитных полюсов с маленькими зубцами, каждый из которых имеет обмотку.
Каждая обмотка соединена с обмоткой противоположного полюса, так что оба полюса намагничиваются с одинаковой полярностью, когда ток подается через пару обмоток.(Пропускание тока через данную обмотку намагничивает противоположную пару полюсов с одинаковой полярностью, то есть с севера или юга.)
Пара противоположных полюсов составляет одну фазу. Поскольку имеется 10 магнитных полюсов или пять фаз, в этом конкретном двигателе называется 5-фазный шаговый двигатель.
На внешнем периметре каждого ротора имеется 50 зубьев, причем зубья чашки 1 ротора и чашки 2 ротора механически смещены относительно друг друга на половину шага зуба.
Speed-Torque
Очень важно, чтобы вы знали, как читать кривую скорость-крутящий момент, поскольку она расскажет нам, что двигатель может и не может делать.Кривые скорость-крутящий момент представляют данный двигатель и данный привод. Когда двигатель работает, его крутящий момент зависит от типа привода и напряжения. Один и тот же двигатель может иметь совершенно другую кривую скорость-крутящий момент при использовании с другим приводом.
ORIENTAL MOTOR дает кривые скорость-крутящий момент для справки. Если двигатель используется с аналогичным приводом, с аналогичным напряжением и током, вы должны получить аналогичную производительность. Обратитесь к интерактивной кривой скорость-крутящий момент ниже:
Чтение кривой скоростного момента
- Момент удержания
Величина крутящего момента, который двигатель создает в состоянии покоя, когда его номинальный ток течет через его обмотки. - Область пуска / останова
Значения, при которых двигатель может мгновенно запускаться, останавливаться или вращаться. - Момент затяжки
Значения крутящего момента и скорости, при которых двигатель может запускаться, останавливаться или вращаться синхронно с входными импульсами. - Момент затяжки
Значения крутящего момента и скорости, при которых двигатель может работать синхронно с фазами входа. Максимальные значения, которые двигатель может обеспечить без остановки. - Максимальная пусковая скорость
Максимальная скорость, при которой двигатель может запускаться при измерении без нагрузки. - Максимальная скорость движения
Самая высокая скорость вращения двигателя, измеренная без нагрузки.
Для работы в области между втягиванием и выдвижением сначала необходимо запустить двигатель в области пуска / останова.Затем частота пульса увеличивается до достижения желаемой скорости. Для остановки скорость двигателя затем снижается до тех пор, пока она не окажется ниже кривой крутящего момента.
Крутящий момент пропорционален току и числу витков провода. Если мы хотим увеличить крутящий момент на 20%, мы должны увеличить ток примерно на 20%. Точно так же, если мы хотим уменьшить крутящий момент на 50%, уменьшите ток на 50%.
Из-за магнитного насыщения нет никакого преимущества увеличивать ток более чем в 2 раза от номинального тока.В этот момент увеличение тока не увеличит крутящий момент. Примерно в 10 раз больше номинального тока вы рискуете размагничить ротор.
Все наши двигатели имеют изоляцию класса B и могут выдержать 130 ° C до того, как изоляция ухудшится. Если мы допустим перепад температур 30 ° изнутри наружу, корпус не должен превышать 100 ° C.
Индуктивность влияет на крутящий момент на высокой скорости. Индуктивность является причиной, по которой двигатели не имеют высокой степени крутящего момента до бесконечности.Каждая обмотка двигателя имеет определенные значения индуктивности и сопротивления. Индуктивность в Генри, деленная на сопротивление в Омах, дает нам значение секунд. Это количество секунд (постоянная времени) – это время, за которое катушка заряжается до 63% от ее номинального значения. Если двигатель рассчитан на 1 ампер, после 1 постоянной времени катушка будет на 0,63 ампер. Примерно через 4 или 5 постоянных времени катушка будет до 1 ампер. Поскольку крутящий момент пропорционален току, если ток заряжается только до 63%, двигатель будет иметь только около 63% своего крутящего момента после 1 постоянной времени.
На низких скоростях это не проблема. Ток может входить и выходить из катушек достаточно быстро, поэтому двигатель имеет номинальный крутящий момент. На высоких скоростях, однако, ток не может войти достаточно быстро, прежде чем переключится следующая фаза. Крутящий момент уменьшается.
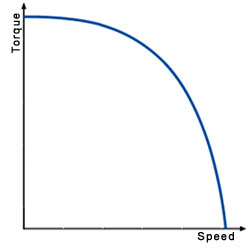
Напряжение драйвера играет большую роль в быстродействии. Чем выше отношение напряжения привода к напряжению двигателя, тем лучше характеристики на высокой скорости. Высокое напряжение заставляет ток в обмотках с большей скоростью, чем указанные выше 63%.
Вибрация
Когда шаговый двигатель совершает переход от одного шага к следующему, ротор не останавливается немедленно. ротор фактически проходит конечную позицию, вытягивается назад, проходит конечную в противоположном направлении и продолжает двигаться вперед и назад, пока, наконец, не остановится (см. интерактивную диаграмму ниже). Мы называем это «звон», и это происходит каждый шаг двигателя. Подобно банджо-шнуру, импульс переносит ротор за точку останова, затем он «подпрыгивает» взад-вперед, пока, наконец, не остановится.В большинстве случаев, однако, двигатель получает команду перейти к следующему шагу, прежде чем он остановится.
Графики ниже показывают звон при различных условиях нагрузки. Разгруженный, мотор показывает много звонков. Много звонков означает много вибрации. Двигатель часто глохнет, если он не загружен или слегка нагружен, потому что вибрация настолько высока, что он потеряет синхронность. При тестировании шагового двигателя всегда обязательно добавляйте нагрузку.
Два других графика показывают двигатель с нагрузкой.Правильная загрузка двигателя сгладит его производительность. Нагрузка должна составлять от 30% до 70% крутящего момента, который может производить двигатель, а отношение инерции нагрузки к инерции ротора должно составлять от 1: 1 до 10: 1. Для более коротких и быстрых ходов соотношение должно быть ближе от 1: 1 до 3: 1.
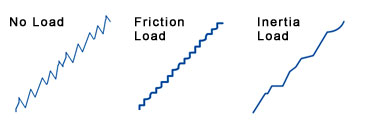
ORIENTAL MOTOR специалист по применению и инженеры могут помочь в подборе правильного размера.
Двигатель будет демонстрировать сильные вибрации, когда частота входного импульса соответствует собственной частоте двигателя.Это называется резонансом и обычно происходит около 200 Гц. В резонансе перерегулирование и понижение становятся намного больше, и вероятность пропустить шаги намного выше. Резонанс изменяется в зависимости от инерции нагрузки, но обычно он составляет около 200 Гц.
2-фазные шаговые двигатели могут пропускать шаги только в группах по четыре. Если вы пропускаете шаги, кратные четырем, вибрация вызывает потерю синхронизма или слишком большая нагрузка. Если пропущенные шаги не кратны четырем, есть большая вероятность, что неправильное количество импульсов или электрических помех вызывает проблемы.
Есть много способов обойти резонанс. Самый простой способ – вообще избежать этой скорости. 200 Гц не очень быстрая, для двухфазного двигателя с 60 об / мин. Большинство двигателей имеют максимальную стартовую скорость около 1000 pps или около того. Таким образом, в большинстве случаев вы можете запустить двигатель на более высокой скорости, чем резонансная скорость.
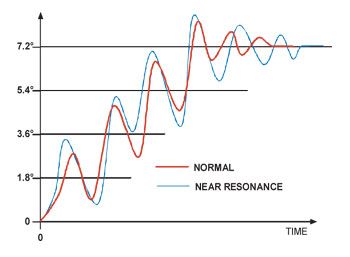
Если вам нужно начать со скорости ниже резонансной, быстро ускоряйтесь через резонансный диапазон.
Другое решение – уменьшить угол шага.Двигатель всегда будет превышать и снижать скорость при больших углах поворота. Если двигателю не нужно ехать далеко, он не будет накапливать достаточное усилие (крутящий момент) для превышения допустимого значения. Каждый раз, когда угол шага уменьшается, двигатель не будет вибрировать так сильно. Вот почему полушаговые и микрошаговые системы настолько эффективны для снижения вибрации.
Убедитесь, что двигатель рассчитан в соответствии с нагрузкой. Выбирая подходящий мотор, вы можете улучшить производительность.
заслонки также доступны.Демпферы устанавливаются на заднем валу двигателя и поглощают часть вибрационной энергии. Они часто сглаживают вибрирующий мотор недорого.
5-фазный шаговый двигатель
Относительно новая технология в шаговых двигателях 5-фазная. Наиболее очевидным различием между 2-фазным и 5-фазным (см. Интерактивную диаграмму ниже) является количество полюсов статора. В то время как 2-фазные двигатели имеют 8 полюсов, 4 на фазу, 5-фазный двигатель имеет 10 полюсов, 2 на фазу. Ротор такой же, как у 2-фазного двигателя.
В то время как 2-фазный двигатель перемещается с шагом 1/4 зуба в каждой фазе. 5-фазный из-за своей конструкции перемещается на 1/10 шага зуба. Поскольку шаг по-прежнему составляет 7,2 °, угол шага составляет 0,72 °. Просто основанная на конструкции, разрешение 5-фазы имеет 500 шагов на оборот против 2-фазы с 200 шагами на оборот. 5-фазное разрешение в 2,5 раза лучше, чем у 2-фазного.
При более высоком разрешении вы получаете меньший угол шага, что, в свою очередь, снижает вибрацию.Поскольку угол шага 5-фазы в 2,5 раза меньше, чем у 2-фазного, вибрации намного ниже. Как в 2-фазном, так и в 5-фазном режиме ротор должен отклоняться или отклоняться более чем на 3,6 °, чтобы пропустить шаги. Поскольку угол шага 5-фазной фазы составляет всего 0,72 °, для двигателя практически невозможно отклониться от нормы или на 3,6 °. Вероятность потери синхронизации с 5-фазным шаговым двигателем очень мала.
Методы езды
Существует четыре различных способа привода шаговых двигателей:
- Wave Drive (полный шаг)
- 2 фазы (полный шаг)
- 1-2 фазы вкл (полушаг)
- Микрошаг
Wave Drive
На диаграмме ниже метод волнового привода был упрощен, чтобы лучше проиллюстрировать теорию.На иллюстрации каждый поворот на 90 ° соответствует вращению ротора на 1,8 ° в реальном двигателе.
В методе волнового возбуждения (также называемом методом однофазного включения) только одна фаза включается за раз. Когда мы возбуждаем фазу А южным полюсом, он притягивает северный полюс ротора. Выключаем A и включаем B, ротор вращается на 90 ° (1,8 °) и так далее. Каждый раз только одна фаза находится под напряжением.
Волновой привод имеет четырехступенчатую электрическую последовательность для вращения двигателя.
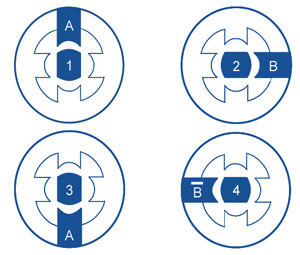
2 фазы на
В методе «2 фазы вкл.» Две фазы всегда находятся под напряжением.
Еще раз на иллюстрации ниже, каждые 90 ° представляют собой поворот на 1,8 °. Если обе фазы A и B находятся под напряжением как южные полюса, северный полюс ротора будет одинаково притянут к обоим полюсам и выстроится в линию прямо посередине. В последовательности, когда фазы находятся под напряжением, ротор будет вращаться, чтобы выровняться между двумя полюсами под напряжением.
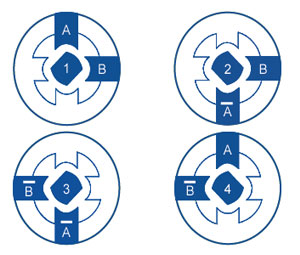
Метод «2 фазы вкл.» Имеет четырехступенчатую электрическую последовательность для вращения двигателя.
ORIENTAL MOTOR Стандартные 2-фазные и 2-фазные двигатели типа М используют метод «2 фазы включения».
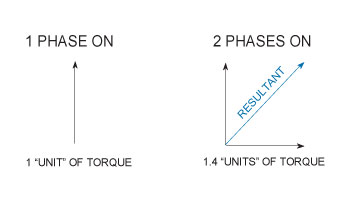
Какое преимущество имеет метод «2 фазы при включении» над методом «1 фазы при включении»? Ответ крутящий момент. В методе «1 фаза включения» одновременно включается только одна фаза, поэтому на ротор действует одна единица крутящего момента. В методе «2 фазы включения» у нас есть два единицы крутящего момента, воздействующие на ротор, 1 в положении 12 часов и 1 в положении 3 часов. Если сложить эти два вектора крутящего момента вместе, мы получим результирующее значение при 45 °, а величина будет на 41,4% больше.Используя метод «2 фазы при включении», мы можем получить тот же угол шага, что и при методе «1 фаза при включении», но с крутящим моментом на 41% больше.
Пятифазные двигатели немного отличаются. Вместо того, чтобы использовать метод «двухфазного включения», мы используем метод «четырехфазного включения». Каждый раз, когда мы включаем 4 фазы, и двигатель делает шаг.
Пятифазный двигатель проходит 10-ступенчатую электрическую последовательность.
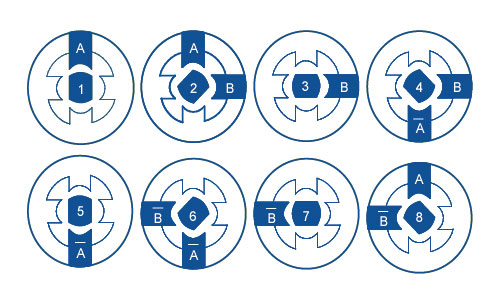
1-2 фазы вкл (полушаг)
Метод «1-2 фазы вкл» или «полушаговый» объединяют два предыдущих метода.В этом случае мы возбуждаем А-фазу. Ротор выравнивается. На этом этапе мы держим фазу A включенной и активируем фазу B. Теперь ротор одинаково притягивается к обеим линиям посередине. Ротор повернулся на 45 ° (0,9 °). Теперь мы выключаем фазу A, но оставляем на фазе B. Двигатель делает еще один шаг. И так далее. Чередуя одну фазу и две фазы, мы сократили угол шага пополам. Помните, что с меньшим углом шага вибрация уменьшается.
(Для 5-фазного двигателя мы чередуем 4 и 5 фаз.)
Полупереходный режим имеет восьмиступенчатую электрическую последовательность. Для пятифазного двигателя в режиме «4-5 фаз вкл.» Двигатель проходит 20-шаговую электрическую последовательность.
Microstep
Microstepping – это способ сделать маленькие шаги еще меньше. Чем меньше шаг, тем выше разрешение и лучше характеристики вибрации. В микрошаге фаза не полностью включена или полностью выключена. Он частично включен. Синусоидальные волны применяются как к фазе А, так и к фазе В, разнесенной на 90 ° (0.9 ° в пятифазном шаговом двигателе).
Когда максимальная мощность находится в фазе A, фаза B находится в нуле. Ротор выровняется с фазой А. По мере того, как ток к фазе А уменьшается, он увеличивается до фазы В. Ротор будет делать небольшие шаги в направлении фазы В, пока фаза В не достигнет своего максимума, а фаза А не будет равна нулю. Процесс продолжается вокруг других фаз, и у нас есть микрошаг.
Есть несколько проблем, связанных с микрошагом, в основном это точность и крутящий момент. Поскольку фазы представляют собой только фазы, на которые подается только частично, крутящий момент двигателя уменьшается, как правило, примерно на 30%.Кроме того, поскольку разница крутящего момента между ступенями очень мала, двигатель иногда не может преодолеть нагрузку. В этих случаях двигателю может быть приказано двигаться на 10 шагов, прежде чем он действительно начнет двигаться. Во многих случаях необходимо закрыть цикл с помощью кодировщиков, которые увеличивают цену.
Системы с шаговым двигателем
- Системы с открытой петлей
- Системы с замкнутым контуром
- Сервосистемы
Open Loop
Шаговые двигателиспроектированы как система с разомкнутым контуром.Генератор импульсов посылает импульсы в схему чередования фаз. Секвенсор фаз определяет, какие фазы необходимо выключить или включить, как описано в полной информации о шагах и полу шагах. Секвенсор управляет мощными полевыми транзисторами, которые затем вращают двигатель.
В системе с разомкнутым контуром, однако, нет проверки положения и нет возможности узнать, сделал ли двигатель свой заданный ход.
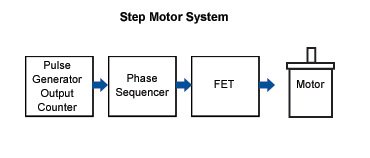
Замкнутый цикл
Самый популярный метод замыкания контура – это установка энкодера на заднем валу двигателя с двойным валом.Кодировщик состоит из тонкого диска с линиями на нем. Диск проходит между передатчиком и приемником. Каждый раз, когда между ними появляется линия, на сигнальные линии выводится импульс. Эти импульсы поступают обратно на контроллер, который ведет их учет. Обычно в конце хода контроллер сравнивает количество импульсов, отправленных драйверу, с количеством импульсов энкодера, отправленных обратно. Обычно пишется, что если два числа различны, то разница восполняется.Если числа совпадают, ошибка не возникает, и движение продолжается.
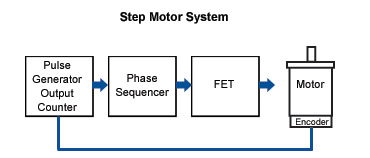
Этот метод имеет два недостатка: стоимость (и сложность) и ответ. Дополнительные затраты на кодировщик, а также увеличение сложности контроллера увеличивают стоимость системы. Кроме того, поскольку коррекция (если таковая имеется) выполняется в конце хода, в систему можно добавить дополнительное время.
Сервосистема
Другой вариант – сервосистема.Сервосистема, как правило, представляет собой двигатель с низким числом полюсов, который дает высокую скорость, но не имеет встроенной способности позиционирования. Чтобы сделать это устройством позиционирования, требуется обратная связь, обычно и кодировщик или распознаватель, и контуры управления. Сервопривод по существу включается и выключается, пока счетчик резольвера не достигнет определенной точки. Поэтому сервопривод работает на основе ошибки. Например, сервопривод получает команду на 100 оборотов. Счетчик резольвера показывает ноль, и двигатель включается. Когда счетчик резольвера достигает 100 оборотов, двигатель выключается.Если положение отклоняется, двигатель снова включается, чтобы вернуть его в положение. То, как сервопривод реагирует на ошибку, зависит от настройки усиления. Если настройка усиления высокая, двигатель очень быстро отреагирует на любые изменения в ошибке. Если настройка усиления низкая, двигатель не будет так быстро реагировать на изменения ошибки. Однако при любой настройке усиления по времени временные задержки вводятся в систему управления движением.
AlphaStep с замкнутым контуром, шаговый двигатель, системы
AlphaStep – революционный шаговый двигатель от Oriental Motor.AlphaStep имеет встроенный распознаватель, который обеспечивает обратную связь по положению. Во все моменты времени мы знаем, где находится ротор.
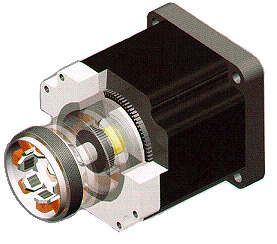
В драйвере AlphaStep есть счетчик ввода. Все импульсы, поступающие на привод, считаются. Обратная связь резольвера поступает на счетчик положения ротора. Любое отклонение присутствует в счетчике отклонений. Обычно двигатель работает с разомкнутым контуром. Мы делаем векторы крутящего момента и мотор следует. Если счетчик отклонений показывает что-то большее, чем ± 1.8 °, секвенсор фазы включает вектор крутящего момента в верхней части кривой смещения крутящего момента, генерируя максимальный крутящий момент, чтобы привести ротор в синхронизм. Если двигатель отключается на несколько шагов, секвенсор подает питание на несколько векторов крутящего момента в верхней части кривой смещения крутящего момента. Водитель может выдержать перегрузку до 5 секунд. Если в течение 5 секунд он не сможет привести двигатель в синхронное состояние, водитель выйдет из строя и отправит аварийный сигнал.
Отличительной особенностью AlphaStep является то, что он исправляет пропущенные шаги на лету.Он не ждет до конца хода, чтобы внести исправления. Как только ротор вернется в пределах 1,8 °, водитель возвращается в режим разомкнутого контура и посылает соответствующие фазы питания.
На графике ниже показана кривая смещения крутящего момента, а также когда устройство находится в режиме разомкнутого или замкнутого контура. Кривая смещения крутящего момента представляет собой крутящий момент, создаваемый одной фазой. Он создает максимальный крутящий момент, когда зубья ротора смещены на 1,8 °. Двигатель может пропустить только шаг, если он превышает 3.6 °. Поскольку водитель берет на себя управление вектором крутящего момента, когда он не достигает 1,8 °, двигатель не может пропустить шаги, кроме случаев, когда он перегружен в течение более 5 секунд.
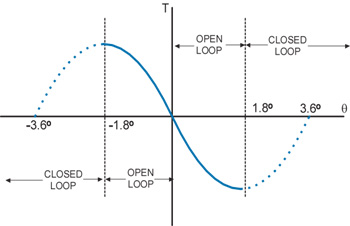
Многие считают, что точность шага AlphaStep составляет ± 1,8 °. Точность шага AlphaStep составляет 5 угловых минут (0,083 °). Водитель контролирует векторы крутящего момента за пределами 1,8 °. Находясь внутри 1,8 °, зубья ротора будут совпадать с генерируемым вектором крутящего момента. AlphaStep удостоверяется, что правильный зуб выровнен с вектором крутящего момента.
AlphaStep доступен во многих версиях. ORIENTAL MOTOR предлагает версии с круглым валом и редукторами с несколькими передаточными числами для увеличения разрешения и крутящего момента или для уменьшения отраженной инерции. Почти все версии могут быть оснащены отказоустойчивым магнитным тормозом. ORIENTAL MOTOR также имеет версию на 24 В постоянного тока, называемую серией ASC.
Заключение
Итак, шаговые двигатели отлично подходят для позиционирования. Шаговые двигатели можно точно контролировать с точки зрения как расстояния, так и скорости, просто изменяя количество импульсов и их частоту.Их высокое число полюсов дает им точность, и в то же время они работают с разомкнутым контуром. При правильном размере для применения шаговый двигатель никогда не пропустит шаг. И поскольку они не нуждаются в позиционной обратной связи, они очень рентабельны.
,
Шаговые двигатели обеспечивают точное позиционирование с легкостью. Они используются в различном оборудовании для точного контроля угла поворота и скорости с помощью импульсных сигналов. Шаговые двигатели генерируют высокий крутящий момент с компактным корпусом и идеально подходят для быстрого ускорения и реакции. Шаговые двигатели также удерживают свои позиции в остановленном положении благодаря своей механической конструкции. Решения с шаговым двигателем состоят из привода (принимает импульсные сигналы и преобразует их в движение двигателя) и шагового двигателя.
Oriental Motor предлагает множество решений для самых разных областей применения:
- Шаговые двигатели с замкнутым контуром AlphaStep, 2-фазные шаговые двигатели, 5-фазные шаговые двигатели
- Опции редуктора, энкодера и электромагнитного тормоза
- Драйверы шагового двигателя переменного или постоянного тока
- Размеры рамы от 0,79 дюйма (20 мм) до 3,54 дюйма (90 мм)
Подробнее …
Шаговые двигатели (только мотор)

Oriental Motor предлагает широкий выбор шаговых двигателей, в том числе; Шаговые двигатели с замкнутым контуром AlphaStep, 2-фазные шаговые двигатели и 5-фазные шаговые двигатели доступны в типоразмерах от 0.От 79 дюймов (20 мм) до 3,54 дюйма (90 мм). Предлагаются пять шаговых двигателей с редуктором, варианты энкодера и тормоза, а также различные обмотки двигателя.
- 0,79 дюйма ~ 3,54 дюйма (20 мм ~ 90 мм) NEMA 8 ~ NEMA 34 типоразмер шаговых двигателей
- Доступны без люфта, с низким люфтом и цилиндрическими зубчатыми колесами
- AlphaStep с замкнутым контуром, 2-фазные и 5-фазные шаговые двигатели
- Опции кодировщика и электромагнитного тормоза
Драйверы с шаговым двигателем

Драйверы шаговых двигателей преобразуют импульсные сигналы от контроллера в движение двигателя для достижения точного позиционирования.
- AC или DC Вход
- AlphaStep Замкнутый контур, двухфазный или 5-фазный драйвер шагового двигателя
- Импульсный вход, встроенный контроллер или совместимые с EtherNet / IP ™ и EtherCAT версии
- Тип платы или коробки
![]()
![]()
EtherNet / IP ™ является товарным знаком ODVA
Speed Control Шаговые двигатели и драйверы

Система контроля скорости серии CV CVK предлагает простую конфигурацию, состоящую из шагового двигателя, привода и программируемого контроллера.Рабочая скорость, время ускорения и замедления, рабочий ток могут быть установлены с помощью переключателей привода, и простое переключение входа FWD (RVS) в положение ON или OFF позволяет легко управлять.
- Генератор импульсов не требуется
- Возможны 2 режима скорости
- Компактный шаговый двигатель с высоким крутящим моментом
Контроллеры / Сетевые шлюзы
 Контроллеры и сетевые шлюзы
Контроллеры и сетевые шлюзыдля использования с системами управления движением.
- Контроллеры для использования с драйверами импульсного ввода
- Сетевые преобразователи / шлюзы (связь RS-485)
- EtherCat
- CC-Link
- MECHATROLINK
![]()
![]()
![]()
Stepper Motors & Drivers
Шаговый двигатель используется для достижения точного позиционирования с помощью цифрового управления.Двигатель работает путем точной синхронизации с импульсным сигналом, выводимым с контроллера на драйвер. Шаговые двигатели, обладающие способностью создавать высокий крутящий момент на низкой скорости при минимальной вибрации, идеально подходят для приложений, требующих быстрого позиционирования на коротком расстоянии.
Точное позиционирование в мелких шагах
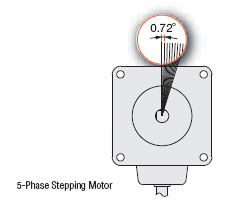
Шаговый двигатель вращается с фиксированным шагом, как секундная стрелка часов. Этот угол называется «базовым углом шага».Oriental Motor предлагает шаговые двигатели с базовым углом шага 0,36 °, 0,72 °, 0,9 ° и 1,8 °.
Использование технологии гибридного шагового двигателя
Гибридный шаговый двигатель представляет собой комбинацию двигателей с переменным сопротивлением и двигателями с постоянными магнитами. Ротор гибридного шагового двигателя намагничен в осевом направлении, как шаговый двигатель с постоянным магнитом, а на статор подается электромагнитное напряжение, как шаговый двигатель с переменным сопротивлением. И статор, и ротор имеют несколько зубьев.
Гибридный шаговый двигатель имеет осевой намагниченный ротор, что означает, что один конец намагничен как северный полюс, а другой конец – как южный полюс. Чашки зубчатого ротора расположены на каждом конце магнита, и чашки смещены на половину шага зуба.
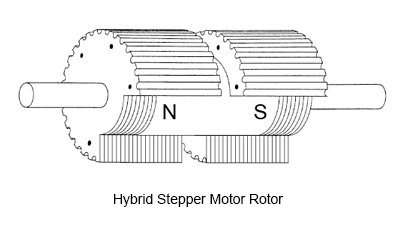
Простое управление с импульсными сигналами
Конфигурация системы для высокоточного позиционирования показана ниже. Угол поворота и скорость шагового двигателя можно точно контролировать с помощью импульсных сигналов от контроллера.
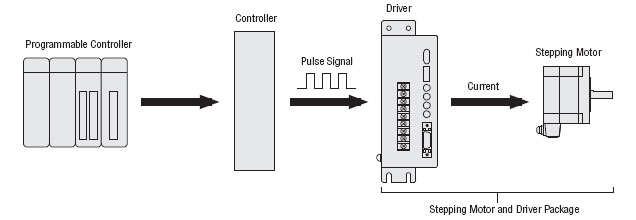
Что такое импульсный сигнал?
Импульсный сигнал – это электрический сигнал, уровень напряжения которого неоднократно изменяется между ВКЛ и ВЫКЛ. Каждый цикл ВКЛ / ВЫКЛ считается одним импульсом. Команда с одним импульсом заставляет выходной вал двигателя вращаться на один шаг. Уровни сигналов, соответствующие условиям включения и выключения напряжения, называются «H» и «L» соответственно.
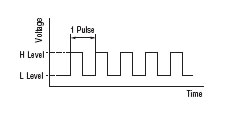
Количество вращения пропорционально количеству импульсов
Количество, которое вращает шаговый двигатель, пропорционально количеству импульсных сигналов (число импульсов), подаваемых на драйвер.Соотношение вращения шагового двигателя (угол поворота выходного вала двигателя) и числа импульсов выражается следующим образом:
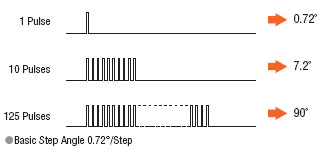
Скорость пропорциональна скорости импульса
Скорость шагового двигателя пропорциональна скорости импульсных сигналов (частоты импульсов), подаваемых водителю. Соотношение частоты импульсов [Гц] и скорости двигателя [об / мин] выражается следующим образом:
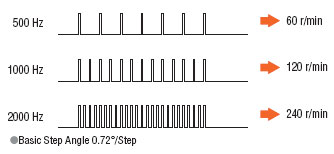
Создание высокого крутящего момента с компактным корпусом
Шаговые двигатели создают высокий крутящий момент с компактным корпусом.Эти особенности дают им отличное ускорение и реакцию, что, в свою очередь, делает эти двигатели хорошо подходящими для приложений с высокими требованиями к крутящему моменту, когда двигатель должен часто запускаться и останавливаться. Чтобы удовлетворить потребность в большем крутящем моменте на низкой скорости, Oriental Motor также имеет мотор-редукторы, сочетающие компактный дизайн и высокий крутящий момент.
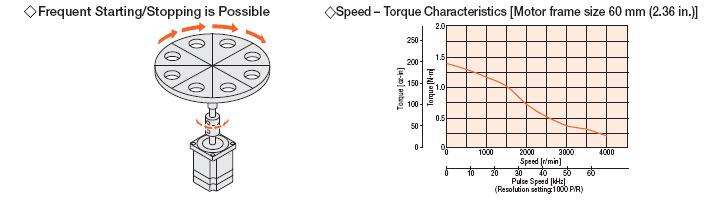
Двигатель удерживается в остановленном положении
Шаговые двигатели продолжают генерировать удерживающий момент даже в состоянии покоя.Это означает, что двигатель можно удерживать в остановленном положении без использования механического тормоза.
После отключения питания момент удержания двигателя теряется, и двигатель больше не может удерживаться в положении останова при вертикальных операциях или при приложении внешней силы. В лифте и аналогичных применениях используйте электромагнитный тормоз.
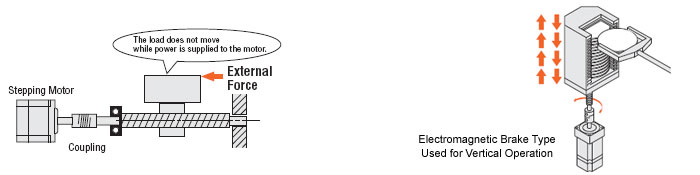
Шаговые двигатели и драйверы с замкнутым контуром – AlphaStep
AlphaStep состоит из шаговых двигателей и приводных устройств, разработанных для максимального использования возможностей шагового двигателя.Эти продукты обычно работают синхронно с импульсными командами, но когда происходит внезапное ускорение или изменение нагрузки, уникальный режим управления поддерживает операцию позиционирования. Модели AlphaStep также могут выводить сигналы завершения позиционирования и сигналы тревоги, что повышает надежность оборудования, на котором они работают.
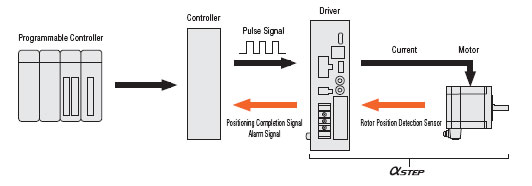
Типы операционных систем
Каждый шаговый двигатель и привод объединяет шаговый двигатель, выбранный из различных типов, с выделенным приводом.Доступны драйверы, которые работают в режиме импульсного ввода и в режиме встроенного контроллера. Вы можете выбрать желаемую комбинацию в соответствии с требуемой операционной системой.
Драйвер импульсного ввода
Двигатель может управляться с помощью генератора импульсов, предоставленного пользователем. Рабочие данные заранее вводятся в генератор импульсов. Затем пользователь выбирает данные операции на главном программируемом контроллере, а затем вводит команду операции.
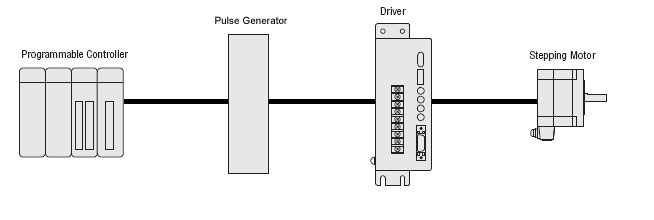
Драйвер встроенного контроллера
Встроенная функция генерации импульсов позволяет приводить двигатель в действие через напрямую подключенный персональный компьютер или программируемый контроллер.Поскольку не требуется отдельного генератора импульсов, драйверы этого типа экономят место и упрощают подключение.
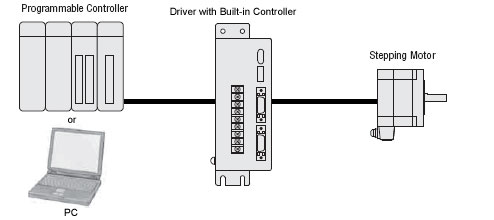
Разница между характеристиками входа переменного и постоянного тока
Шаговый двигатель приводится в действие постоянным напряжением, подаваемым через драйвер. В системах с входным двигателем 24 В постоянного тока и приводом от двигателя 24 В постоянного тока подается на двигатель. В системах двигателя и привода 100-115 В переменного тока вход выпрямляется до постоянного тока, а затем к двигателю подается приблизительно 140 В постоянного тока (некоторые продукты являются исключениями из этого.)
Эта разница в напряжении, приложенном к двигателям, проявляется как разница в характеристиках крутящего момента на высоких скоростях. Это связано с тем, что чем выше приложенное напряжение, тем быстрее будет возрастать ток через обмотки двигателя, что облегчает подачу номинального тока на более высоких скоростях. Таким образом, входной двигатель переменного тока и система привода имеют превосходные характеристики крутящего момента в широком диапазоне скоростей, от низких до высоких скоростей, предлагая большое соотношение скоростей.
Рекомендуется, чтобы входные двигатели переменного тока и системы привода, которые совместимы в более широком диапазоне рабочих условий, чем системы ввода постоянного тока, рассматривались для вашего применения.
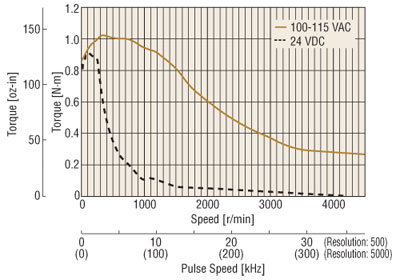
Как работает шаговый двигатель
В этой статье вы узнаете, как работает шаговый двигатель. Мы рассмотрим основные принципы работы шаговых двигателей, их режимы движения и типы шаговых двигателей по конструкции. Вы можете посмотреть следующее видео или прочитать написанную статью.
Принцип работы
Шаговый двигатель – это бесщеточный двигатель постоянного тока, который вращается ступенчато. Это очень полезно, потому что его можно точно позиционировать без какого-либо датчика обратной связи, который представляет собой контроллер с разомкнутым контуром.Шаговый двигатель состоит из ротора, который обычно является постоянным магнитом, и он окружен обмотками статора. Когда мы постепенно активируем обмотки в определенном порядке и пропускаем через них ток, они намагничивают статор и создают электромагнитные полюса, соответственно, которые приводят двигатель в движение. Так что это основной принцип работы шаговых двигателей.

Режимы движения
Существует несколько различных способов управления шаговым двигателем.Первый – это волновой привод или возбуждение с одной катушкой. В этом режиме мы активируем только одну катушку за раз, что означает, что для этого примера двигателя с 4 катушками ротор совершит полный цикл за 4 шага.

Далее идет режим полного шага привода, который обеспечивает намного более высокий выходной крутящий момент, потому что у нас всегда есть 2 активных катушки в данный момент времени. Однако это не улучшает разрешение шагового двигателя, и ротор снова совершает полный цикл за 4 шага.

Для увеличения разрешения степпера мы используем режим полушагового привода.Этот режим фактически является комбинацией двух предыдущих режимов.
Здесь у нас есть одна активная катушка, за которой следуют 2 активные катушки, а затем снова одна активная катушка, за которой следуют 2 активные катушки и так далее. Таким образом, в этом режиме мы получаем удвоенное разрешение при той же конструкции. Теперь ротор совершит полный цикл за 8 шагов.
 Однако в настоящее время наиболее распространенным методом управления шаговыми двигателями является микрошаг. В этом режиме мы подаем переменный управляемый ток на катушки в виде синусоидальной волны.Это обеспечит плавное движение ротора, уменьшит напряжение деталей и повысит точность шагового двигателя.
Однако в настоящее время наиболее распространенным методом управления шаговыми двигателями является микрошаг. В этом режиме мы подаем переменный управляемый ток на катушки в виде синусоидальной волны.Это обеспечит плавное движение ротора, уменьшит напряжение деталей и повысит точность шагового двигателя.

Другим способом увеличения разрешения шагового двигателя является увеличение числа полюсов ротора и числа полюсов статора.

Типы шаговых двигателей по конструкции
По конструкции существуют 3 различных типа шаговых двигателей: шаговый двигатель с постоянным магнитом, шаговый двигатель с переменным сопротивлением и гибридный синхронный шаговый двигатель.

Степпер с постоянным магнитом имеет ротор с постоянным магнитом, который приводится в действие обмотками статора. Они создают противоположные полюса полярности по сравнению с полюсами ротора, который движет ротор.

В следующем типе шагового двигателя с переменным сопротивлением используется немагнитный ротор из мягкого железа. Ротор имеет зубья, которые смещены относительно статора, и когда мы активируем обмотки в определенном порядке, ротор перемещается соответственно так, чтобы он имел минимальный зазор между статором и зубьями ротора.

Гибридный синхронный двигатель это комбинации двух предыдущих степперов.Имеет зубчатый ротор с постоянными магнитами, а также зубчатый статор. Ротор имеет две секции, противоположные по полярности, и их зубья смещены, как показано здесь.

Это вид спереди широко используемого гибридного шагового двигателя, который имеет 8 полюсов на статоре, которые активируются 2 обмотками A и B. Поэтому, если мы активируем обмотку A, мы намагничиваем 4 полюса, из которых два из них будут иметь южную полярность, а два – северную.

Мы видим, что таким образом зубья роторов выровнены с зубьями полюсов A и выровнены с зубьями полюсов B.Это означает, что на следующем шаге, когда мы выключим полюса A и активируем полюса B, ротор будет двигаться против часовой стрелки, а его зубцы будут совмещены с зубцами полюсов B.

Если мы будем продолжать активировать полюса в определенном порядке, ротор будет двигаться непрерывно. Здесь мы также можем использовать различные режимы движения, такие как волновой привод, полный шаг, полушаг и микро шаг, чтобы еще больше увеличить разрешение шагового двигателя.
 .
.Больше новостей
