
устройство, принцип работы, типы, схемы подключения
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Что такое шаговый двигатель?
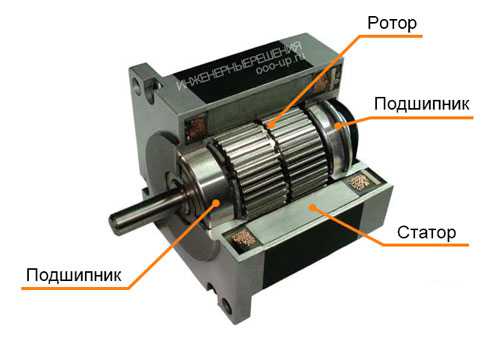
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Устройство и принцип работы
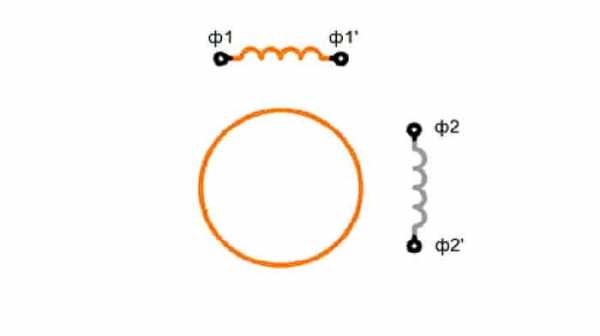
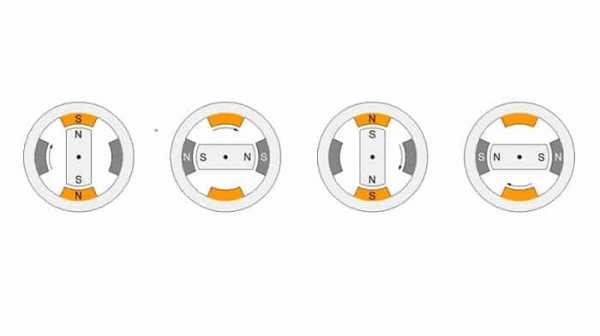
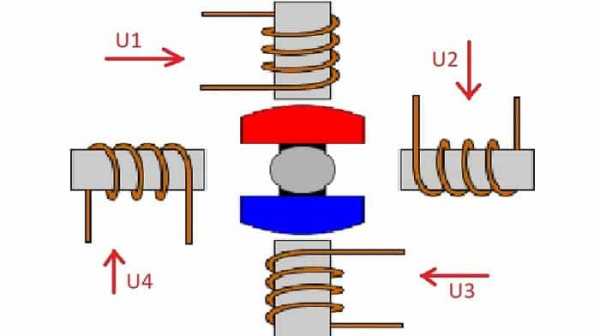 Рис. 1. Принцип действия шагового двигателя
Рис. 1. Принцип действия шагового двигателяНа рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
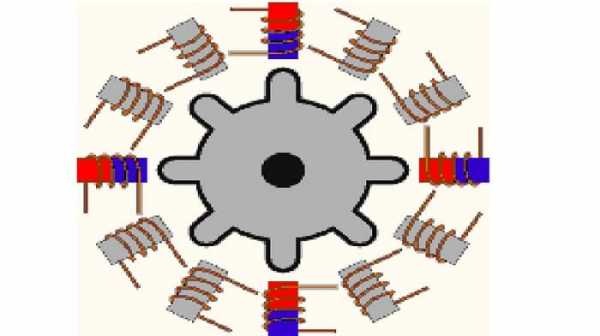
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
 С переменным магнитным сопротивлением
С переменным магнитным сопротивлениемВесомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
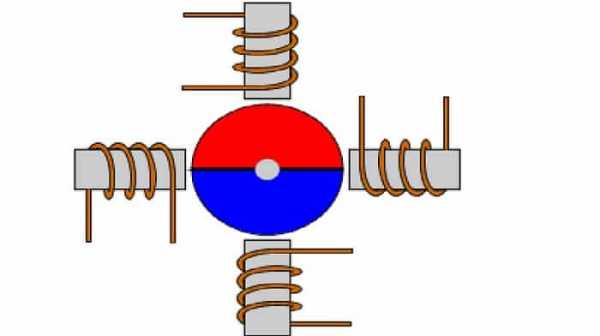
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
 С постоянным магнитом
С постоянным магнитомГибридные
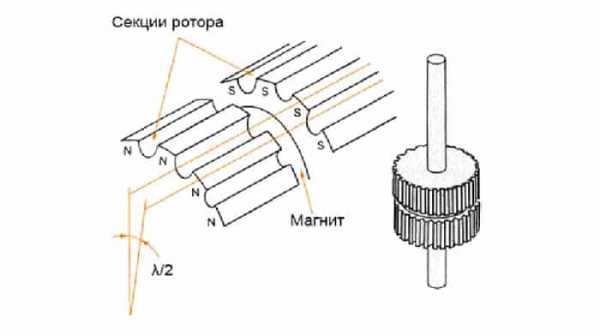
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
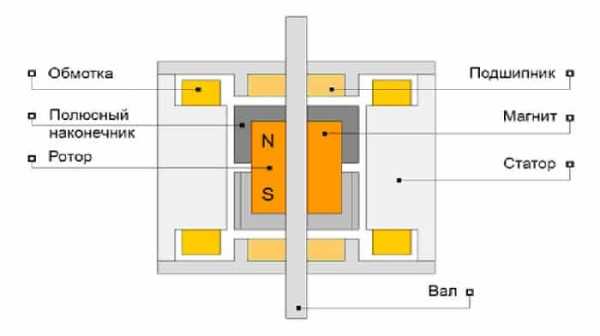 Устройство гибридного шагового двигателя
Устройство гибридного шагового двигателя
Преимущества гибридного шагового двигателя заключатся в его высокой точности, плавности и скорости перемещения, малым шагом – от 0,9 до 5°. Их применяют для высококлассных станков ЧПУ, компьютерных и офисных приборах и современной робототехнике. Единственным недостатком считается относительно высокая стоимость.
Для примера разберем вариант гибридных ШД на 200 шагов позиционирования вала. Соответственно каждый из цилиндров будет иметь по 50 зубцов, один из них является положительным полюсом, второй отрицательным. При этом каждый положительный зубец расположен напротив паза в отрицательном цилиндре и наоборот. Конструктивно это выглядит так:
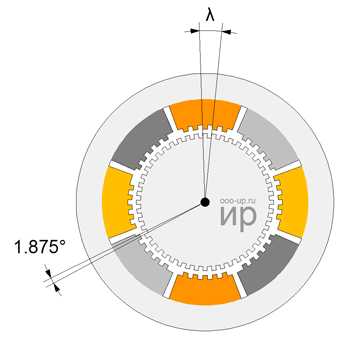
 Расположение пазов гибридника
Расположение пазов гибридникаИз-за чего на валу шагового двигателя получается 100 перемежающихся полюсов с отличной полярностью. Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.
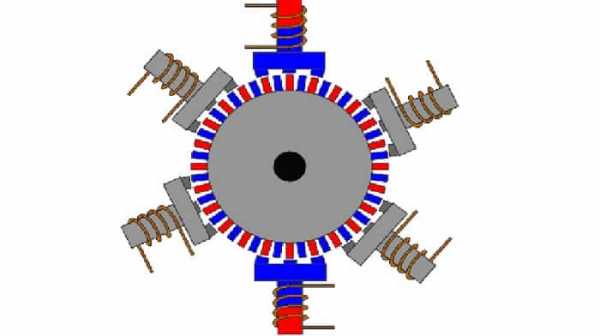 Рис. 6. Принцип работы гибридного ШД
Рис. 6. Принцип работы гибридного ШДЗа счет такой конструкции можно достичь смещения того же южного полюса относительно статора в 50 различных позиций. За счет отличия положения в полупозиции между северным и южным полюсом достигается возможность перемещения в 100 позициях, а смещение фаз на четверть деления предоставляет возможность увеличить количество шагов за счет последовательного возбуждения еще вдвое, то есть до 200 шагов углового вала за 1 оборот.
Обратите внимание на рисунок 6, принцип работы такого шагового двигателя заключается в том, что при попарной подаче тока в противоположные обмотки происходит подтягивание разноименных полюсов ротора, расположенных за зубьями статора и отталкивание одноименных, идущих перед ними по ходу вращения.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.
 Униполярный ШД
Униполярный ШДДля использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.
Биполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
 Биполярный шаговый двигатель
Биполярный шаговый двигательВ конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Подключение шагового двигателя
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
В зависимости от схемы подключения должны применяться те или другие выводы шагового агрегата. При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
Типичные схемы подключения ШД
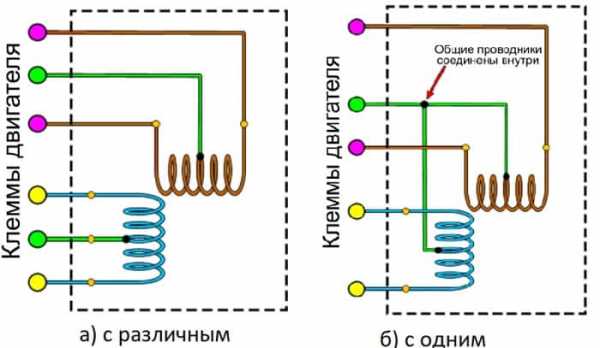
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:
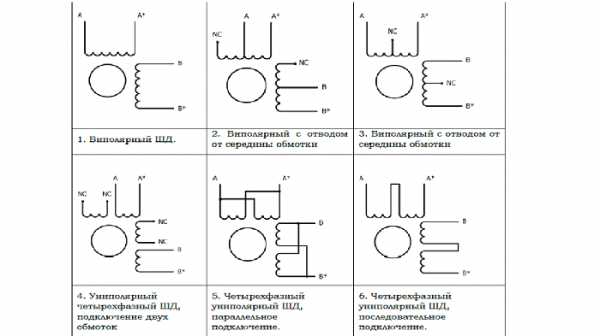 Схемы подключения различных типов шаговых двигателей
Схемы подключения различных типов шаговых двигателей- Выводы однозначно подводятся к соответствующим клеммам устройства. При последовательном соединении обмоток увеличивает индуктивность обмоток, но понижает ток.
- Обеспечивает паспортное значение электрических характеристик. При параллельной схеме увеличивается ток и снижается индуктивность.
- При подключении по одной фазе на обмотку снижется момент на низких оборотах и уменьшает величину токов.
- При подключении осуществляет все электрические и динамические характеристики согласно паспорта, номинальный токи. Значительно упрощается схема управления.
- Выдает куда больший момент и применяется для больших частот вращения;
- Как и предыдущая предназначена для увеличения момента, но применяется для низких частот вращения.
Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.
 Волновое управление
Волновое управлениеПолношаговый — в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.
 Полношаговое управление
Полношаговое управлениеПолушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.
 Полушаговое управление
Полушаговое управлениеДля более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами. Позволяет в значительной степени снизить рывки шагового двигателя.
Без контроллера
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
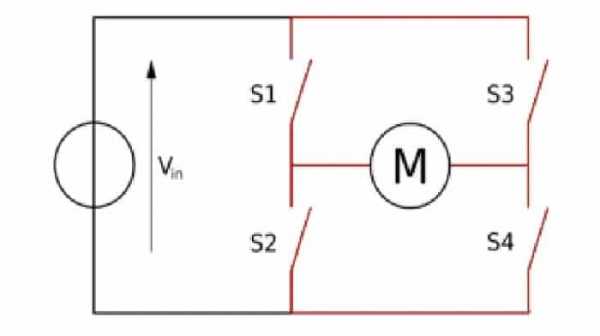 Схема Н-моста
Схема Н-мостаКак видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
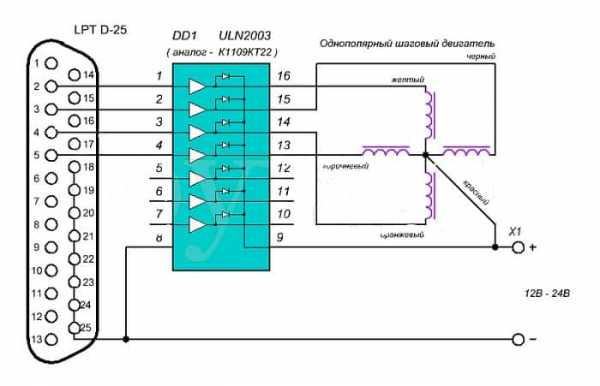 Подключение через контроллер однополярного шагового двигателя
Подключение через контроллер однополярного шагового двигателяПопулярные схемы управления ШД
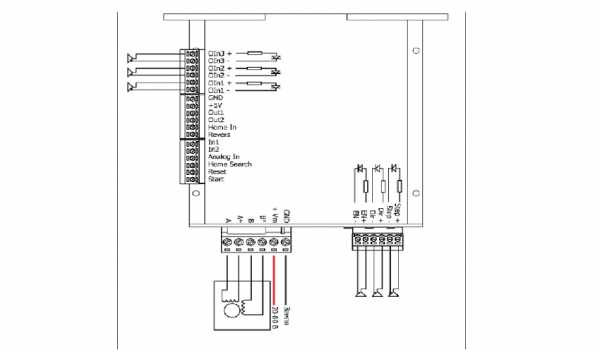 Схема управления от контроллера с дифференциальным выходом
Схема управления от контроллера с дифференциальным выходомЯвляется одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.
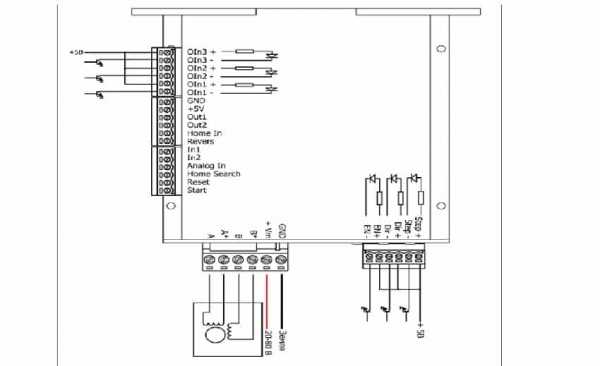 Схема управления от контроллера с выходом типа «открытый коллектор»
Схема управления от контроллера с выходом типа «открытый коллектор»В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока. Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
Простейший драйвер шагового двигателя своими руками
Чтобы собрать схему драйвера в домашних условиях могут пригодиться некоторые элементы от старых принтеров, компьютеров и другой техники. Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).
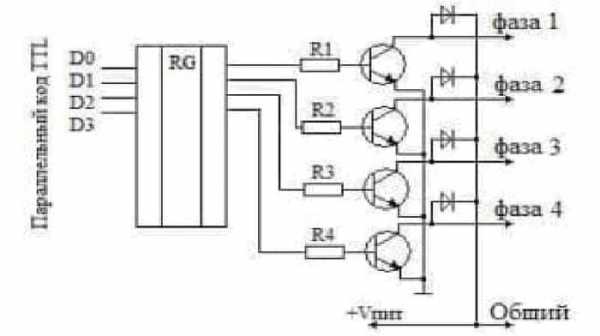 Схема простейшего драйвера
Схема простейшего драйвераДля построения программы руководствуйтесь следующим принципом: при подаче на один из выводов D логической единицы (остальные сигнализируют ноль) происходит открытие транзистора и сигнал проходит к катушке двигателя. Таким образом, выполняется один шаг.
На основе схемы составляется печатная плата, которую можно попытаться изготовить самостоятельно или сделать под заказ. После чего на плате впаиваются соответствующие детали. Устройство способно управлять шаговым устройством от домашнего компьютера за счет подключения к обычному USB порту.
Полезное видео
www.asutpp.ru
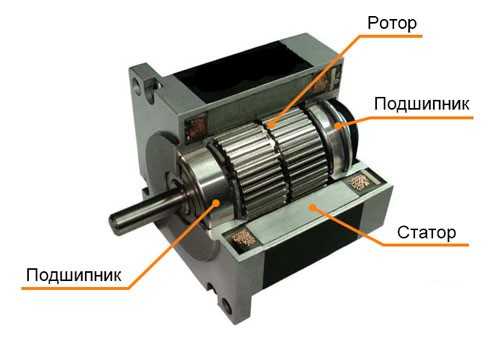
Шаговый двигатель
Дмитрий Левкин
Шаговый электродвигатель – это вращающийся электродвигатель с дискретными угловыми перемещениями ротора, осуществляемыми за счет импульсов сигнала управления [1].Предшественником шагового двигателя является серводвигатель.
Шаговые (импульсные) двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2].
Поэтому в задачах, где требуются высокие характеристики (точность, быстродействие) используются серводвигатели. В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
Шаговый двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор – неподвижная часть, ротор – вращающаяся часть.
Гибридный шаговый электродвигатель
Шаговые двигатели надежны и недороги, так как ротор не имеет контактных колец и коллектора. Ротор имеет либо явно выраженные полюса, либо тонкие зубья. Реактивный шаговый двигатель – имеет ротор из магнитомягкого материала с явно выраженными полюсами. Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Гибридный шаговый двигатель имеет составной ротор включающий полюсные наконечники (зубья) из магнитомягкого материала и постоянные магниты. Определить имеет ротор постоянные магниты или нет можно посредством вращения обесточенного двигателя, если при вращении имеется фиксирующий момент и/или пульсации значит ротор выполнен на постоянных магнитах.
Статор шагового двигателя имеет сердечник с явно выраженными полюсами, который обычно делается из ламинированных штампованных листов электротехнической стали для уменьшения вихревых токов и уменьшения нагрева. Статор шагового двигателя обычно имеет от двух до пяти фаз.
Так как шаговый двигатель не предназначен для непрерывного вращения в его параметрах не указывают мощность. Шаговый двигатель – маломощный двигатель по сравнению с другими электродвигателями.
Одним из определяющих параметров шагового двигателя является шаг ротора, то есть угол поворота ротора, соответствующий одному импульсу. Шаговый двигатель делает один шаг в единицу времени в момент изменения импульсов управления. Величина шага зависит от конструкции двигателя: количества обмоток, полюсов и зубьев. В зависимости от конструкции двигателя величина шага может меняться в диапазоне от 90 до 0,75 градусов. С помощью системы управления можно еще добиться уменьшения шага пополам используя соответствующий метод управления.
Реактивный шаговый двигатель – синхронный реактивный двигатель. Статор реактивного шагового двигателя обычно имеет шесть явновыраженных полюсов и три фазы (по два полюса на фазу), ротор – четыре явно выраженных полюса, при такой конструкции двигателя шаг равен 30 градусам. В отличии от других шаговых двигателей выключенный реактивный шаговый двигатель не имеет фиксирующего (тормозящего) момента при вращении вала.
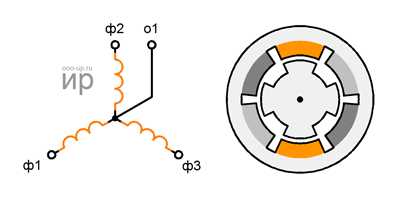
Трехфазный реактивный шаговый двигатель
(шаг 30°)
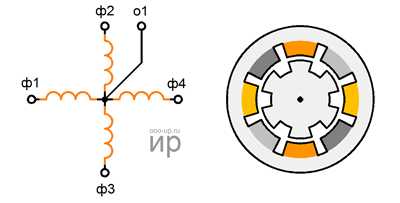
Четырехфазный реактивный шаговый двигатель
(шаг 15°)
Ниже представлены осциллограммы управления для трехфазного шагового двигателя.
Униполярное волновое управление
Биполярное полношаговое управление
Биполярное 6-шаговое управление
Осциллограммы управления для четырехфазного шагового двигателя показаны на рисунке ниже. Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
,
- где NR – количество полюсов ротора;
- NS – количество полюсов статора.
Осциллограммы управления 4-х фазным реактивным шаговым двигателем
Чтобы изменить направление вращения ротора (реверс) реактивного шагового двигателя, необходимо поменять схему коммутации обмоток статора, так как изменение полярности импульса не изменяет направления сил, действующих на невозбужденный ротор [2].
Реактивные шаговые двигатели применяются только тогда, когда требуется не очень большой момент и достаточно большого шага угла поворота. Такие двигатели сейчас редко применяются.
- Отличительные черты:
- ротор из магнитомягкого материала с явно выраженными полюсами;
- наименее сложный и самый дешевый шаговый двигатель;
- отсутствует фиксирующий момент в обесточенном состоянии;
- большой угол шага.
Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Статор обычно имеет две фазы.
По сравнению с реактивными, шаговые двигатели с активным ротором создают большие вращающие моменты, обеспечивают фиксацию ротора при снятии управляющего сигнала. Недостаток двигателей с активным ротором — большой угловой шаг (7,5—90°). Это объясняется технологическими трудностями изготовления ротора с постоянными магнитами при большом числе полюсов. Если угол фиксации находится в диапазоне от 7,5 до 90 градусов скорее всего это шаговый двигатель с постоянными магнитами нежели гибридный шаговый двигатель.
Обмотки могут иметь ответвление в центре для работы с однополярной схемой управления. Двухполярное управление требуется для питания обмоток без центрального ответвления.
Униполярный (однополярный) шаговый двигатель
Униполярный шаговый двигатель с постоянными магнитами имеет одну обмотку на фазу с ответвлением в центре. Каждая секция обмотки включается отдельно.
Таким образом расположение магнитных полюсов может быть изменено без изменения направления тока, а схема коммутации может быть выполнена очень просто (например на одном транзисторе) для каждой обмотки. Обычно центральное ответвление каждой фазы делается общим, в результате получается три вывода на фазу и всего шесть для обычного двухфазного двигателя.
Легкое управление однополярными двигателями сделало их популярными для любителей, они возможно являются наиболее дешевым способом чтобы получить точное угловое перемещение.
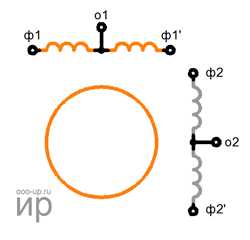
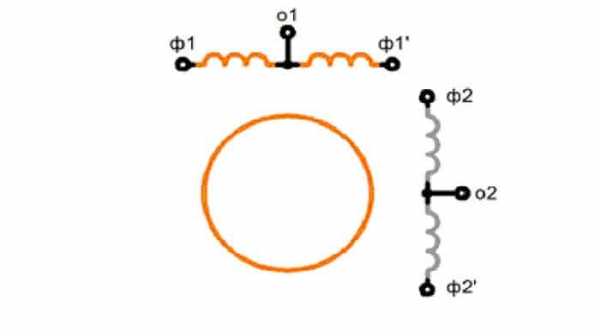
Схема униполярного двухфазного шагового двигателя
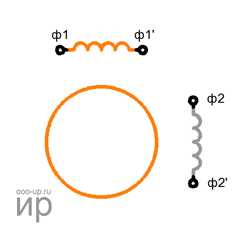
Схема биполярного двухфазного шагового двигателя
Биполярный шаговый двигатель
Двухполярные двигатели имеют одну обмотку на фазу. Для того чтобы изменить магнитную полярность полюсов необходимо изменить направление тока в обмотке, для этого схема управления должна быть более сложной, обычно с H-мостом. Биполярный шаговый двигатель имеет два вывода на фазу и не имеет общего вывода. Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Управление шаговым двигателем с постоянными магнитами
Для управления шаговым двигателем на постоянных магнитах к его обмоткам прикладывается сфазированный переменный ток. На практике это почти всегда прямоугольный сигнал сгенерированный от источника постоянного тока. Биполярная система управления генерирует прямоугольный сигнал изменяющийся от плюса к минусу, например от +2,5 В до -2,5 В. Униполярная система управления меняет направление магнитного потока катушки посредством двух сигналов, которые поочереди подаются на противоположные выводы катушки относительно ее центрального ответвления.
Волновое управление
Простейшим способом управления шаговым двигателем является волновое управление. При таком управлении в один момент времени возбуждается только одна обмотка. Но такой способ управления не обеспечивает максимально возможного момента.
Положение ротора шагового двигателя при волновом управлении
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора.
Волновое управление биполярным шаговым двигателем
На рисунке выше представлены схема биполярного шагового двигателя и двухполюсные осциллограммы управления. При таком управлении обе полярности (“+” и “-“) подаются на двигатель. Магнитное поле катушки поворачивается за счет того, что полярность токов управления меняется.
Волновое управление униполярным шаговым двигателем
На рисунке выше представлены схема униполярного шагового двигателя и однополюсные осциллограммы управления.Так как для управления униполярным шаговым двигателем требуется только одна полярность это существенно упрощает схему системы управления. При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
Необходимое для работы шагового двигателя переменное магнитное поле может быть создано как униполярным так и биполярным способом. Однако для униполярного управления катушки двигателя должны иметь центральное ответвление.
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора. Схемы соединения шагового двигателя показаны на рисунке ниже.
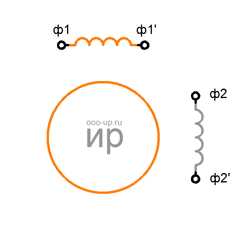
Схема 4 выводного биполярного шагового двигателя
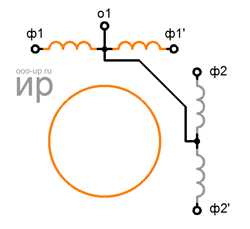
Схема 5 выводного униполярного шагового двигателя
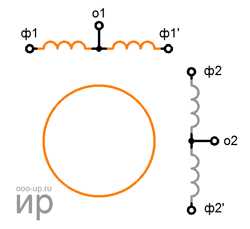
Схема 6 выводного униполярного шагового двигателя
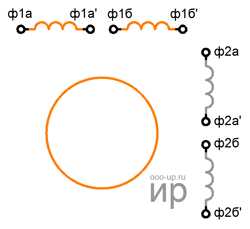
Схема 8 выводного шагового двигателя
Шаговый двигатель с 4 выводами может управляться только биполярным способом. 6-выводной двигатель предназначен для управления униполярным способом, несмотря на то, что он также может управляться биполярным способом если игнорировать центральные выводы. 5-выводной двигатель может управляться только униполярным способом, так как общий центральный вывод соединяет обе фазы. 8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель. Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
- 8-выводные двигатели могут быть соединены в нескольких конфигурациях:
- униполярной;
- биполярной с последовательным соединением. Больше индуктивность, но ниже ток обмотки;
- биполярной с параллельным соединением. Больше ток, но ниже индуктивность;
- биполярной с одной обмоткой на фазу. Метод использует только половину обмоток двигателя при работе, что уменьшает доступный момент на низких оборотах, но требует меньше тока.
Полношаговое управление
Полношаговое управление обеспечивает больший момент, чем волновое управление так как обе обмотки двигателя включены одновременно. Положение ротора при полношаговом управлении показано на рисунке ниже.
Положение ротора шагового двигателя при полношаговом управлении
Полношаговое биполярное управление шаговым двигателем
Полношаговое биполярное управление показанное на рисунке выше имеет такой же шаг как и при волновом управлении. Униполярное управление (не показано) потребует два однополярных управляющих сигнала для каждого биполярного сигнала. Однополярное управление требует менее сложной и дорогой схемы управления. Дополнительная стоимость биполярного управления оправдана когда требуется более высокий момент.
Полушаговое управление
Шаг для данной геометрии шагового двигателя делится пополам. Полушаговое управление обеспечивает большее разрешение при позиционировании вала двигателя.
Положение ротора шагового двигателя при полушаговом управлении
Полушаговое управление – комбинация волнового управления и полношагового управления с питанием по очереди: сначала одной обмотки, затем с питанием обоих обмоток. При таком управлении количество шагов увеличивается в двое по сравнению с другими методами управления.
Полушаговое биполярное управление шаговым двигателем
Гибридный шаговый двигатель был создан с целью объединить лучшие свойства обоих шаговых двигателей: реактивного и с постоянными магнитами, что позволило добиться меньшего угла шага. Ротор гибридного шагового двигателя представляет из себя цилиндрический постоянный магнит, намагниченный вдоль продольной оси с радиальными зубьями из магнитомягкого материала.
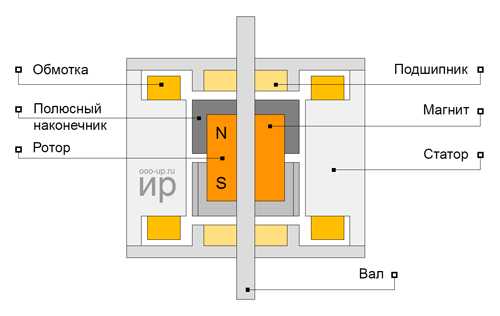
Конструкция гибридного шагового двигателя (осевой разрез)
Статор обычно имеет две или четыре фазы распределенные между парами явно выраженных полюсов. Обмотки статора могут иметь центральное ответвление для униполярного управления. Обмотка с центральным ответвлением выполняется с помощью бифилярной намотки.
Гибридный шаговый двигатель (радиальный разрез)
Заметьте что 48 зубьев на одной секции ротора смещены на половину зубцового деления λ относительно другой секции (рисунок ниже). Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.
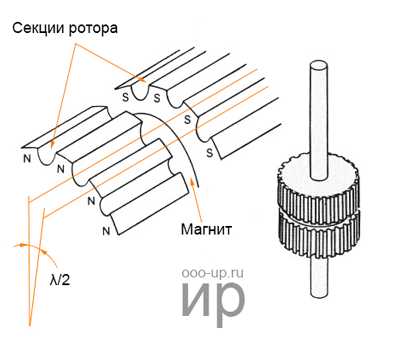
Ротор гибридного шагового двигателя
Зубья на полюсах статора соответствуют зубьям ротора, исключая отсутствующие зубья в пространстве между полюсами. Таким образом один полюс ротора, скажем южный полюс, можно выровнять со статором в 48 отдельных положениях. Однако зуб южного полюса ротора смещен относительно северного зуба на половину зубцового деления. Поэтому ротор может быть выставлен со статором в 96 отдельных положениях.
Соседние фазы статора гибридного шагового двигателя смещены друг относительно друга на одну четверть зубцового деления λ. В результате ротор перемещается с шагом в четверть зубцового деления во время переменного возбуждения фаз. Другими словами для такого двигателя на один оборот приходится 2×96=192 шага.
- Шаговый гибридный двигатель имеет:
- шаг меньше, чем у реактивного двигателя и двигателя с постоянными магнитами;
- ротор – постоянный магнит с тонкими зубьями. Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага;
- полюсы статора имеют такие же зубья как и ротор;
- статор имеет не менее чем две фазы;
- зубья соседних полюсов статора смещены на четверть зубцового деления для создания меньшего шага.
engineering-solutions.ru
Шаговые двигатели. Принцип работы и управление
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определяется выражением:
αш = 360 / Kt * Zр
В выражении для KT величину n2 следует брать равной 1, так как изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышения степени редукции шаговых двигателей как активного, так и реактивного типа, можно достичь применением двух-, трех- и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов — два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время, роторы-звездочки каждого из пакетов не имеют пространственного сдвига, то есть оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной. Кроме того, она требует сложного коммутатора.
Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага — больший синхронизирующий момент, лучшие энергетические и динамические характеристики.
purelogic.ru
Управление шаговым двигателем | Электроника для всех
Рано или поздно, при постройке робота, возникнет нужда в точных перемещениях, например, когда захочется сделать манипулятор. Вариантов тут два — сервопривод, с обратными связями по току, напряжению и координате, либо шаговый привод. Сервопривод экономичней, мощней, но при этом имеет весьма нетривиальную систему управления и под силу далеко не всем, а вот шаговый двигатель это уже ближе к реальности.Шаговый двигатель это, как понятно из его названия, двигатель который вращается дискретными перемещениями. Достигается это за счет хитрой формы ротора и двух (реже четырех) обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения.
В среднем, у шагового двигателя на один оборот вала, приходится около ста шагов. Но это сильно зависит от модели двигателя, а также от его конструкции. Кроме того, существуют полушаговый и микрошаговый режим, когда на обмотки двигателя подают ШИМованное напряжение, заставляющее ротор встать между шагами в равновесном состоянии, которое поддерживается разным уровнем напряжения на обмотках. Эти ухищрения резко улучшают точность, скорость и бесшумность работы, но снижается момент и сильно увеличивается сложность управляющей программы — надо ведь расчитывать напряжения для каждого шага.
Один из недостатков шаговиков, по крайней мере для меня, это довольно большой ток. Так как на обмотки напруга подается все время, а такого явления как противоЭДС в нем, в отличии от коллекторных двигателей, не наблюдается, то, по сути дела, мы нагружаемся на активное сопротивление обмоток, а оно невелико. Так что будь готов к тому, что придется городить мощный драйвер на MOSFET транзисторах или затариваться спец микросхемами.
Типы шаговых двигателей
Если не углубляться во внутреннюю конструкцию, число шагов и прочие тонкости, то с пользовательской точки зрения существует три типа:
- Биполярный — имеет четыре выхода, содержит в себе две обмотки.
- Униполярный — имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины.
- Четырехобмоточный — имеет четыре независимые обмотки. По сути дела представляет собой тот же униполярник, только обмотки его разделены. Вживую не встречал, только в книжках.
Где взять шаговый двигатель.
Вообще шаговики встречаются много где. Самое хлебное место — пятидюймовые дисководы и старые матричные принтеры. Еще ими можно поживиться в древних винчестерах на 40Мб, если, конечно, рука поднимется покалечить такой антиквариат.
А вот в трехдюймовых флопарях нас ждет облом — дело в том, что там шаговик весьма ущербной конструкции — у него только один задний подшипник, а передним концом вал упирается в подшипник закрепленный на раме дисковода. Так что юзать его можно только в родном креплении. Либо городить высокоточную крепежную конструкцию. Впрочем, тебе может повезет и ты найдешь нетипичный флопарь с полноценным движком.
Схема управления шаговым двигателем
Я разжился контроллерами шаговиков L297 и мощным сдвоенным мостом L298N.
Лирическое отступление, при желании можно его пропустить
Именно на нем был сделан мой первый силовой блок робота. Кроме него там еще два источника питания на 5 и на 3.3 вольта, а также контроллер двух движков на L293 (такой же как и во второй реализации силового блока). В качестве контроллера тогда был выбран АТ89С2051. Это антикварный контроллер архитектуры MSC-51 в котором из периферии только два таймера, порты да UART, но я его люблю нежно и трепетно, так как первая любовь не проходит никогда =). К сожалению исходники его мега прошивки канули в Лету вместе с убившимся винтом, так что я не могу поделиться теми извращенскими алгоритмами, которые были туда засунуты. А там был и двухканальный ШИМ, и I2C Slave протокол, и контроль за положением шаговика с точным учетом его перемещения. Короче, знатный был проект. Ныне валяется трупом, т.к. все лень запустить Keil uVision и написать новую прошивку. Да и ассемблер С51 я стал уже забывать.
Схема включения L298N+L297 до смешного проста — надо тупо соединить их вместе. Они настолько созданы друг для друга, что в даташите на L298N идет прямой отсыл к L297, а в доке на L297 на L298N.
 |
Осталось только подключить микроконтроллер.
- На вход CW/CCW подаем направление вращения — 0 в одну сторону, 1 — в другую.
- на вход CLOCK — импульсы. Один импульс — один шаг.
- вход HALF/FULL задает режим работы — полный шаг/полушаг
- RESET сбрасывает драйвер в дефолтное состояние ABCD=0101.
- CONTROL определяет каким образом задается ШИМ, если он в нуле, то ШИМ образуется посредством выходов разрешения INh2 и INh3, а если 1 то через выходы на драйвер ABCD. Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INh2/INh3 будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема.
- На вход Vref надо подать напряжение с потенциометра, которое будет определять максимальную перегрузочную способность. Подашь 5 вольт — будер работать на пределе, а в случае перегрузки сгорит L298, подашь меньше — при предельном токе просто заглохнет. Я вначале тупо загнал туда питание, но потом передумал и поставил подстроечный резистор — защита все же полезная вещь, плохо будет если драйвер L298 сгорит.
Если же на защиту пофигу, то можешь заодно и резисторы, висящие на выходе sense выкинуть нафиг. Это токовые шунты, с них L297 узнает какой ток течет через драйвер L298 и решает сдохнет он и пора отрубать или еще протянет. Там нужны резисторы помощней, учитывая что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении в 0.5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.
Документация по микросхемам:
easyelectronics.ru
FAQ • Шаговые двигатели или серводвигатели?
Отличия
Основное отличие шаговых двигателей от серводвигателей – то, что шаговые двигатели работают без обратной связи, т.е. нет контроля – сделал ШД шаг или нет. Драйвер серводвигателя считывает показания датчика положения вала и корректирует его положение. На самом деле, отсутствие обратной связи в случае с ШД не является минусом, т.к. при правильно спроектированной и настроенной системе шаговые двигатели не пропускают шагов, т.е. пользователь не нуждается в таком контроле.
Достоинства и недостатки
Достоинства ШД:
- Точность и стабильность шага, ШД может работать с инерционными нагрузками.
- Не нужна обратная связь. ШД сам по себе это датчик положения.
- ШД – самый доступный, бюджетный, стандартный электродвигатель. Прост в подключении и настройке.
- ШД имеет долгий срок службы.
- ШД безопасен, имеет конечный момент – он останавливается в случае заклинивания передачи.
- ШД имеет хороший момент на низких оборотах, это позволяет обойтись без редуктора.
Достоинства серводвигателей (щеточных):
- Высокая отдаваемая мощность, сравнительно с электродвигателями других типов такого же размера и веса.
- Точность позиционирования определяется установленным энкодером.
- Высокий КПД, до 90% с легкими нагрузками.
- Может быстро ускоряться.
- Может кратковременно отдать повышенную мощность (2-3 раза) и повышенный момент (5-10 раза)
- Двигатель не нагревается, потребляется ток пропорционально нагрузке.
- На высоких скоростях не шумит.
- Не резонирует и не вибрирует во всем диапазоне частот вращения.
Недостатки шаговых двигателей:
- Низкий КПД. ШД потребляет достаточно энергии не зависимо от нагрузки.
- Низкая отдаваемая мощность, сравнительно с электродвигателями других типов такого же размера и веса.
- Крутящий момент сильно зависит от оборотов вращения, сильно падает с увеличением частоты вращения.
- Склонность к резонированию. Требует микрошагового управления для плавного вращения и техник подавления резонансов.
- Отсутствие обратной связи для контроля за пропуском шагов.
- Не может быстро ускоряться.
- ШД сильно нагревается при оптимальном использовании.
- При кратковременной перегрузке, ШД остановится и не сможет восстановить положение вала.
- ШД достаточно шумный (звуковой шум)
Недостатки серводвигателей (щеточных):
- Более высокая стоимость, сравнительно с ШД.
- Система с серводвигателем требует настройки.
- Сложная система. Много соединительных проводов. Наличие энкодера.
- Небезопасная система, если нарушается обратная связь – серводвигатель может провернуть передачу. Требуются системы экстренного отключения.
- Щетки изнашиваются. После 2000 часов работы, требуется их замена.
- Серводвигатель может перегореть при постоянной перегрузке.
- Требуется мощный источник питания, чтобы система была устойчива к кратковременным перегрузкам.
- Серводвигатель отдает максимальный момент на высоких оборотах, поэтому может потребоваться редуктор.
- Серводвигатели плохо охлаждаются. Серводвигатели с вентиляционными отверстиями быстро засоряются продуктами обработки материалов.
Выбор – ШД или серводвигатели
При разработке станка и выборе электродвигателей в первую очередь необходимо рассчитать, какая мощность N(Вт) требуется для управления вашим механизмом. Мы не рекомендуем сначала приобретать электродвигатель а потом пытаться его “приладить” к своей конструкции. Мы рекомендуем использовать шаговые электродвигатели, если расчетная мощность <100Вт и серводвигатели если расчетная мощность >200Вт. Если расчетная мощность находится в диапазоне 100…200Вт – подойдет и шаговый и серводвигатель, выбор ложится на пользователя. При выборе шагового двигателя стоит учитывать тот факт, что у него момент падает с увеличением частоты вращения, согласно приведенным в ТХ графикам.
Метод расчета мощности: Допустим у вас есть ЧПУ плазморез с ременной передачей или подобный ЧПУ станок с малой рабочей нагрузкой (нет усилия для фрезеровки, нужно только перемещать головку плазмореза или лазера). Вам необходимо рассчитать мощность для перемещения оси Y. Допустим Ваша расчетная скорость подачи f=10000 мм/мин, масса перемещаемой конструкции с запасом m=20кг. По инженерной формуле, потребуется мощность N=(f*m)/6120=33Вт. В данном случае можно использовать шаговый двигатель.
Проведем расчет для фрезерного станка ЧПУ. Пусть у вас установлен винт ШВП 1605 – с шагом n=5мм на оборот. Пусть вам необходима скорость подачи f=3000 мм/мин. Рассчитаем необходимые обороты электродвигателя с прямым приводом на винт ШВП RPM=f/n=600 об/мин. Необходимо определить вращающий момент, который нужно приложить к винту ШВП чтобы обеспечить необходимое усилие на фрезе, пусть это будет момент M. Размерность момента Н*м=(кг*см)/10 – масса в кг, которую нужно приложить к рычагу длиной 1см. Пусть в данном случае нам необходим момент 35кг*см=3,5Н*м. Мощность рассчитывается по формуле N=M*RPM*pi/30=220Вт. В данном случае нужно использовать серводвигатель.
purelogic.ru
какова разница и что выбрать? — MULTICUT
31.01.2019
В качестве электропривода порталов и исполнительных узлов фрезерно-гравировальных станков и оборудования для плазменной резки с ЧПУ применяются шаговые двигатели и сервоприводы. Что лучше: шаговый двигатель или сервопривод, и в каких случаях применение того или иного электропривода экономически и технически оправданно, рассмотрим в данной статье.

Устройство шагового привода
Шаговый привод состоит из синхронной электрической машины и управляющего контроллера. Последний обеспечивает подачу управляющих сигналов на обмотки двигателя и их попеременное включение в соответствии с заданной программой.
Шаговый двигатель — электрическая машина, преобразующая управляющие сигналы в перемещение вала на определенный угол и фиксацию его в заданном положении. Количество шагов таких электродвигателей составляет от 100 до 400, угол шага — от 0,9-3,6°.
Принцип работы шагового двигателя
Состоит это электромеханическое устройство из статора, где размещены катушки возбуждения, и вращающейся части с постоянными магнитами или обмотками. Такая конструкция ротора обеспечивает его фиксацию после отработки управляющей команды.
На статоре расположено несколько обмоток. При подаче напряжения на катушку, под воздействием магнитного поля ротор поворачивается на определенный угол в соответствии с пространственным положением обмотки. При ее обесточивании и подаче управляющего сигнала на другую катушку вращающаяся часть электродвигателя занимает другую позицию. Каждый поворот вала соответствует углу шага. При обратной последовательности подачи напряжения на катушки ротор вращается в противоположном направлении.
Для поворота ротора на меньший угол одновременно включаются 2 обмотки. Количество шагов ограничено и зависит от числа полюсов статора электромотора. Для обеспечения плавного вращения ротора на катушки статора подают разные токи, разность которых определяет положение ротора. Такой способ управления позволяет снизить дискретность и увеличить количество шагов до 400.
К числу недостатков шаговых двигателей можно отнести довольно низкую скорость, пропуск шагов при высокой (выше расчетной) нагрузке на валу, снижение момента при высокой частоте вращения и большое время разгона.

Устройство сервопривода
Сервопривод состоит из синхронного двигателя, датчика скорости и положения, а также управляющего контроллера. Основная разница между шаговым двигателем и сервоприводом состоит в наличии обратной связи по положению, скорости, моменту на валу ротора.
Электропривод такого типа построен на базе следящей схемы автоматического регулирования. При несоответствии скорости или другой величины контроллер будет подавать сигналы на отработку, пока требуемый параметр или положение вала не будет соответствовать заданному. В качестве датчика обратной связи используют абсолютные и относительные энкодеры различных типов и конструкций.
Принцип действия сервопривода
Управляющее устройство в соответствии с заданной программой подает напряжение на сервопривод, который соединен с порталом станка. Двигатель перемещает рабочий орган. При этом энкодер вырабатывает импульсы, поступающие на контроллер. Подсчет их числа осуществляет управляющее устройство. Количество импульсов пропорционально перемещению портала. При достижении рабочим органом заданного положения на электромотор перестает поступать напряжение. Портал фиксируется. Пока число импульсов, зафиксированных контроллером с датчика, не достигнет запрограммированной величины, двигатель будет осуществлять перемещение рабочего органа.
Шаговый сервопривод можно также настроить на поддержание постоянной частоты вращения вне зависимости от нагрузки или постоянного момента при разной скорости.
К достоинствам сервоприводов относятся точность позиционирования, динамика разгона и отсутствие снижения момента при высоких скоростях. Ограничивает применение сервопривода, как правило, достаточно большая стоимость.
Чем отличается сервопривод от шагового двигателя?
| Критерий сравнения | Шаговые двигатели | Сервоприводы |
|---|---|---|
| Эксплуатационный ресурс | Шаговые электромоторы не имеют коллекторного узла, подверженного износу. Также они не имеют частей, нуждающихся в регулярном техобслуживании и замене | Коллекторные серводвигатели необходимо регулярно обслуживать. Максимальный срок службы коллекторного узла — 5000 часов непрерывной работы. При этом бесщеточные сервомоторы не уступают в надежности шаговым двигателям |
| Точность перемещений исполнительного органа | Современные шаговые электродвигатели обеспечивают перемещение рабочей части с точностью до 0,01 мм. Отличие шагового двигателя от сервопривода заключается в пропуске шагов при высокой (выше расчетной) нагрузке, что значительно снижает качество обработки |
Сервопривод для поворотного стола фрезерного станка или портала другого оборудования обеспечивает точность до 0,002 мкм. Позиционирование по следящей схеме обеспечивает высокое качество обработки независимо от нагрузки |
| Время разгона и скорость перемещения портала | Максимальная скорость перемещения рабочих органов при использовании шагового электропривода — 25 м. Время разгона — 120 об/мин за секунду |
Сервопривод может перемещать портал со скоростью более 60 м/мин. Время разгона составляет до 1000 об/мин за 0,2 секунды |
| Реакция на принудительную остановку | Шаговые двигатели хорошо переносят механические перегрузки и не выходят из строя при аварийных остановках | Сервоприводы необходимо оснащать дополнительной защитой, отключающей электромотор при принудительной остановке портала. В противном случае обмотки электрической машины могут сгореть |
| Стоимость | За счет простоты конструкции шаговый двигатель имеет относительно невысокую цену | За счет датчиков обратной связи (энкодеров) и более сложной схемы регулирования сервопривод считается дорогостоящим оборудованием |

Критерии выбора
Тип приводного двигателя для станков выбирают по следующим характеристикам:
Производительность.
По этому параметру сервоприводы значительно превосходят шаговые электромоторы. На станок с ЧПУ для обработки крупных деталей или заготовок из твердых материалов лучше уставить сервомотор, например, ESTUN 1000 Вт. Такой электропривод обеспечит более высокую скорость обработки твердых материалов. Для малогабаритного промышленного оборудования среднего класса точности, предназначенного для обработки мягких материалов, лучше выбрать шаговый двигатель.
Эксплуатационные расходы.
Программирование и настройка сервопривода на станке с ЧПУ требуют высокой квалификации исполнителя. Такой привод намного дороже в обслуживании, соответственно расходы на его эксплуатацию будут выше.
Точность.
Сервоприводы для станков с ЧПУ необходимы для высокоточной автоматизированной обработки. Такой привод позволяет позиционировать положение рабочего органа с точностью до 0,02 мкм, в то время как максимальная точность шаговой электрической машины — 0, 01 мм.
Цена.
Стоимость шагового двигателя значительно ниже цены сервопривода. При невысоком бюджете лучше предпочесть первый вариант.
Уровень шума.
По этому показателю сервомоторы предпочтительней. Работа шаговых электродвигателей сопровождается звуком, соответствующим частоте шагов на различных оборотах.
Таким образом, выбор сервопривода или шагового двигателя в качестве привода на фрезерно-гравировальный станок и оборудование для плазменной резки следует совершать, руководствуясь исключительно экономической и технической целесообразностью.
Читайте также

18 Января 2019
Для построения и развития успешного бизнеса, связанного с работой на фрезерном станке с ЧПУ, важно наличие значительных преимуществ перед конкурентами: например, высочайшего качества продукции и доступных цен. В данной статье расскажем, какие именно станки с ЧПУ подходят для малого бизнеса, какова стоимость того или иного оборудования, и насколько рентабелен такой вид деятельности…

18 Января 2019
Станки с ЧПУ значительно повлияли на сферу металлообработки и на работу с другими материалами. Программируемые установки обеспечиваюют повышенную точность фрезеровки, что приводит к значительному увеличению производительности труда. Процесс обработки заготовок проходит беспрерывно и в строгом соответствии заданной программе, а результат работы отличается высокой точностью. В статье мы рассмотрим важнейшие технические характеристики фрезерных станков с ЧПУ и основные сферы их применения…
18 Января 2019
Рабочий режущий инструмент станков с ЧПУ — это фреза. Конструктивно она является вращающейся деталью с заточенными зубьями. Фрезы для станков с ЧПУ по дереву производят из разных сплавов и делят на категории. Их выбор зависит от характеристик обрабатываемой поверхности, типа работы и степени твердости древесины. Правильно выбрать подходящий инструмент для программных станков поможет наша статья, которая познакомит вас с типами фрез и их назначением…

6 Декабря 2018
Шаговое устройство — бесщеточный двигатель с несколькими обмотками, функционирующий по синхронному принципу. Принцип работы шагового двигателя заключается в поочередной активации обмоток, которые обеспечивают вращение / остановку ротора…

6 Декабря 2018
Современные сверлильные станки с ЧПУ используются на производствах, на которых в больших объемах осуществляется обработка деталей всевозможного назначения, например, на мебельных фабриках. Сегодня производители предлагают покупателям модели сверлильных станков с ЧПУ во всем функциональном многообразии…
www.multicut.ru
Выбор сервопривода
Шаговый электропривод – это исполнительное электромеханическое устройство, предназначенное для осуществления мерного перемещения исполнительного органа какого-либо механизма. В отдельных случаях с помощью шагового привода осуществляют регулирование скорости вращения механизма. Электрический шаговый привод – комплектное устройство, состоящее из шагового двигателя и драйвера шагового привода. Драйвер шагового привода, как правило, является связующим элементом между обмотками шагового двигателя, питающей сетью и контроллером верхнего уровня, который осуществляет управление приводом.
По сравнению с сервоприводами с обратной связью (с энкодерами на вале двигателя) шаговый привод решает ту же задачу позиционирования, однако он более дешевый
Шаговые приводы обладают некоторыми характеристиками, значение и смысл которых представлены ниже.
Шаговый двигатель характеризуется удерживающим моментом (синхронизирующий момент, holding torque). Удерживающий момент – предельный момент в остановившемся состоянии, и протекании номинального тока. При приложении к валу момента равного удерживающему шаговый двигатель перестает работать. Рабочий нагрузочный момент двигателя должен быть, по крайней мере, в 2 – 3 раза меньше значения удерживающего момента.
Уменьшение предельного вращающегося момента в зависимости от скорости. Важная характеристика, учет которой позволяет обеспечить работоспособность шагового привода во всем диапазоне рабочих скоростей. Производитель, как правило, дает зависимость момента на валу шагового двигателя от частоты полных – full (или половинных – half) его шагов. При этом следует помнить, что указывается предельный момент на валу, и что максимальный рабочий нагрузочный момент должен быть в 2 – 3 раза меньше этого предельного значения
Номинальный рабочий ток двигателя. Ток, который может протекать через обмотки шагового двигателя в длительном режиме работы. Этот ток создаёт удерживающий момент, значение которого определено в спецификациях шагового двигателя. Величина тока пропорциональна значению удерживающего момента. Температура корпуса шагового двигателя, при протекании через его обмотки тока с номинальным значением, может достигать температуры 70…80 °C. Этот факт необходимо учитывать в прецизионных системах, когда такой нагрев двигателя может привести к не желаемым температурным деформациям других элементов системы.
Рабочий ток привода в остановленном состоянии. В некоторых драйверах шагового привода имеется настройка этого тока (STOP current) отдельно от настройки рабочего тока в состоянии движения (RUN current). Это сделано для того, чтобы уменьшить тепловые нагрузки на шаговый двигатель в остановленном состоянии, когда уменьшенного тока хватает для того, чтобы обеспечить «стояние» двигателя под нагрузкой. При возобновлении движения ток снова возрастает до уровня рабочего тока.
Количество фаз шагового двигателя. Различают 2-х, 3-х и 5-ти фазные шаговые двигатели. Увеличение количества фаз двигателя улучшает плавность хода привода, и, что особенно важно, подавляет резонансные явления в приводной системе, однако увеличивает стоимость не только двигателя, но и шагового драйвера. Определить количество фаз шагового двигателя возможно по значению полного шага: 0.9° и 1.8° соответствуют 2-х фазному двигателю, 1.2° и 1.5° – трехфазному, 0.72° – пятифазному. Значение полного шага обычно приводится в паспортной табличке двигателя.
Количество выводов обмоток. Для двухфазных шаговых двигателей, как правило, различают – 4-х выводные двигатели, 6-ти выводные и 8 выводные. Наиболее универсальные – это 8-ми выводные двигатели. Если выводы такого двигателя соответствующим образом соединить, то можно получить аналог как 6-ти выводного двигателя, так и 4-х выводного. Более того, полу обмотки 8-ми выводного двигателя можно соединять как последовательно, так и параллельно, и тем самым получать шаговый двигатель либо с большим моментом, либо с большей скоростью вращения. Однако эта универсальность является и недостатком, поскольку имеется вероятность неправильного подключения полу обмоток не совсем опытным пользователем. Большинство недорогих драйверов китайского производства имеют 4-е выходные клеммы для подключения обмоток шаговых двигателей.
Трехфазные двигатели шаговые двигатели имеют либо три вывода, либо шесть. В последнем случае обмотки можно включать по схемам «звезда/треугольник (delta)» изменяя соотношение момент/скорость такого двигателя. Один из наиболее известных производителей, использующий 3-х фазный шаговый привод – Siemens. Однако с драйвером Siemens хорошо работают трехфазные шаговые двигатели китайских производителей.
Пятифазные шаговые двигатели могут иметь либо пять выводов, либо десять. В последнем случае обмотки можно включать по схемам «звезда/пентагон», изменяя соотношение момент/скорость такого двигателя. Пятифазные шаговые приводы широко представлены на российском рынке продукцией южно-корейской фирмы Autonics. Как плавило, данный тип продукции используется в приводных высокоточных системах.
Напряжение электропитания драйвера шагового привода. Различают драйверы шагового привода, которые могут питаться от сети с напряжением 220В переменного тока, так и драйверы с питанием от шин постоянного тока с различной величиной напряжения (наиболее часто используется напряжение 24В). Драйверы с напряжением питания 220В переменного тока – наиболее дорогие, однако, обеспечивают наиболее широкий диапазон скоростей вращения шагового двигателя. Существенный недостаток таких драйверов – они приводят к повышенному нагреву шагового двигателя. Это происходит из-за повышенной пульсации тока в обмотках двигателя. Питание повышенным напряжением постоянного тока (до 80 вольт и более) также приводит к широкому диапазону достигаемых скоростей в приводе, однако требует специального вторичного источника питания для этих целей.
Микрошаг. Режим микрошага (иногда этот режим называют режимом дробления шага двигателя) используют для увеличения плавности хода и уменьшения резонансных явлений приводной шаговой системы (и как следствие этого, увеличения быстродействия). Можно говорить и об увеличении точности позиционирования, но только в том случае, если шаговый двигатель сильно недогружен, практически отсутствует сухое трение, и в кинематической цепочке от вала шагового двигателя до исполнительного органа приводного механизма нет упругих инерционных элементов.
Формат управляющих импульсов. Различают следующие форматы управляющих командных импульсов, поступающих от контролера верхнего уровня на командные входы драйвера шагового привода:
– P/D (pulse/direction, puls/sign, импульс/направление, 1P) – управляющие импульсы представлены двумя последовательностями импульсов, первая из которых задаёт величину перемещения, а вторая определяет направление перемещения;
– CW / CCW (по часовой стрелке / против часовой стрелки, 2P) – управляющие импульсы представлены двумя последовательностями импульсов, первая из которых задаёт величину перемещения при вращении в одну сторону, а вторая – величину перемещения при вращении в другую сторону;
– A&B (A/B, квадратурный формат, мастер-энкодер, две сдвинутых меандры) – управляющие импульсы представлены двумя последовательностями, количество фронтов сигналов в которых задают величину перемещения (иногда количество импульсов только одной из последовательностей задаёт величину перемещения, в этом случае эффекта «учетверения импульсов» не происходит), а опережение фазы одной из последовательностей по сравнению с другой – определяет направление вращения двигателя.
Большинство драйверов шагового привода способны работать с любым из вышеперечисленных форматов командных импульсов. «Вес» каждого управляющего импульса (то есть, величина перемещения вала шагового двигателя от действия одного импульса на командных входах драйвера) определяется коэффициентом дробления шага (величиной микрошага), который устанавливается в драйвере шагового привода либо с помощью микропереключателей, либо путем программирования этого драйвера. Дискрета перемещения зависит не только от коэффициента дробления шага, но и от типа двигателя, величины его полного шага. Например, при величине полного шага 1.8° и коэффициенте дробления шага – 256, при подаче одного управляющего импульса вал двигателя должен повернуться на 25,31 угловые секунды
Максимальная частота командных импульсов. Предельная частота импульсов, до которой драйвер шагового привода способен работать не «проглатывая» их. При этом скорость вращения шагового двигателя не обязательно будет близка к предельным значениям, поскольку эта скорость связана с частотой командных импульсов через коэффициент дробления шага двигателя.
Частота приёмистости (стартовая частота) – это частота подачи управляющих импульсов, соответствующая частоте полных (или половинных) шагов, с которой двигатель может сразу начать движение. В паспортных данных приводится частота приемистости соответствующая «пустому» двигателю, то есть, без нагрузки на вале, в том числе инерционной. При увеличении нагрузки частота приёмистости падает. Определить теоретически, какую частоту можно подавать в качестве стартовой, невозможно. Значение этой частоты для конкретной нагрузки определяется методом «проб и ошибок» при настройке системы.
Режим работы. Различают режимы:
– управления положением;
– регулирования скорости.
Управление положением осуществляется шаговым приводом с помощью управляющих импульсов того или иного формата, поступающих от контроллера верхнего уровня (host controller). Однако некоторые производители шаговых проводов предлагают режим регулирования скорости вращения шагового двигателя. Сигнал задания скорости в этом случае является аналоговым сигналом. Двигатель вращается со скоростью пропорциональной величине аналогового сигнала. Перенастройка величины скорости может осуществляться как в режиме реального времени, так и априори, только до момента пуска привода в работу.
Шаговый привод в режиме регулировки скорости может быть использован, например, как простой привод, вращающий нагрузку с постоянной медленной скоростью, без каких либо дополнительных управляющих устройств верхнего уровня.
Дискретные входы. Эти входы воспринимают 2-х уровневый электрический сигнал. Сигналы позволяют управлять драйвером шагового привода. По умолчанию дискретные входы воспринимают отсутствие сигнала, как неактивный уровень сигнала. С помощью этих входов можно осуществить: пуск привода, сбросить аварийное состояние привода, блокировать действие поступающих командных импульсов, изменить направление вращения двигателя и пр.
Степень защиты корпуса. Определяет защиту корпуса от проникновения внутрь твердых предметов, пыли, а также воды. Защита обозначается двумя цифрами после латинских букв IP. Чем больше цифры, тем сильнее защита. Степень – IP20 говорит о том, что для защиты прибора требуется установка его в шкаф, оболочка последнего обеспечивает защиту приборов от пыли и влаги.
www.shop.zetek.ru
