
подключение, управление, примеры работы [Амперка / Вики]
Познакомимся поближе с сервоприводами. Рассмотрим их разновидности, предназначение, подсказки по подключению и управлению.
Что такое сервопривод?
Сервопривод — это мотор с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения. Сервомотором является любой тип механического привода, имеющий в составе датчик положения и плату управления.
Простыми словами, сервопривод — это механизм с электромотором, который может поворачиваться в заданный угол и удерживать текущее положение.
Элементы сервопривода
Рассмотрим составные части сервопривода.
Электромотор с редуктором
За преобразование электричества в механический поворот в сервоприводе отвечает электромотор. В асинхронных сервоприводах установлен коллекторный мотор, а в синхронных — бесколлекторный.
Однако зачастую скорость вращения мотора слишком большая для практического использования, а крутящий момент — наоборот слишком слабый.
Включая и выключая электромотор, вращается выходной вал — конечная шестерня редуктора, к которой можно прикрепить нечто, чем мы хотим управлять.
Позиционер
Для контроля положения вала, на сервоприводе установлен датчик обратной связи, например потенциометр или энкодер. Позиционер преобразует угол поворота вала обратно в электрический сигнал.
Плата управления
За всю обработку данных в сервоприводе отвечает плата управления, которая сравнивает внешнее значения с микроконтроллера со показателем датчика обратной связи, и по результату соответственно включает или выключает мотор.
Выходной вал
Вал — это часть редуктора, которая выведена за пределы корпуса мотора и непосредственно приводиться в движение при подаче управляющих сигналов на сервопривод. В комплектации сервомоторов идут качельки разных формфакторов, которые одеваются на вал сервопривода для дальнейшей коммуникации с вашими задумками.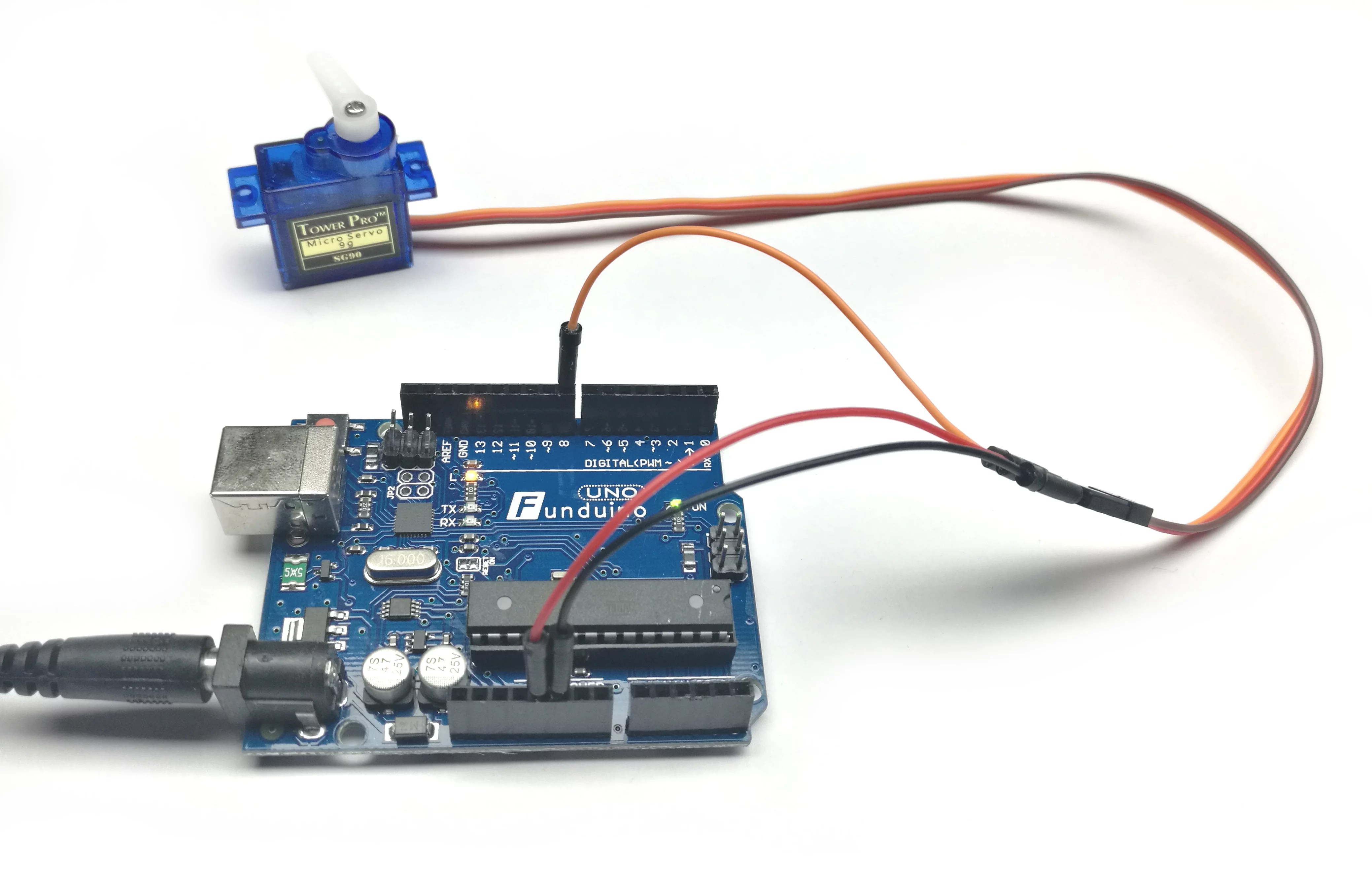
Выходной шлейф
Для работы сервопривода его необходимо подключить к источнику питания и к управляющей плате. Для коммуникации от сервопривода выходит шлейф из трёх проводов:
Красный — питание сервомотора. Подключите к плюсовому контакту источнику питания. Значения напряжение смотрите в характеристиках конкретно вашего сервопривода.
Чёрный — земля. Подключите к минусовому контакту источника питания и земле микроконтроллера.
Жёлтый — управляющий сигнал. Подключите к цифровому пину микроконтроллера.
Если сервопривод питается напряжением от 5 вольт и потребляет ток менее 500 мА, то есть возможность обойтись без внешнего источника питания и подключить провод питания сервомотора непосредственно к питанию микроконтроллера.
Управление сервоприводом
Алгоритм работы
Сервопривод получает на вход управляющие импульсы, которые содержат:
Для простых сервоприводов: значение угла поворота.
Для сервоприводов постоянного вращения: значения скорости и направления вращения.
Плата управления сравнивает это значение с показанием на датчике обратной связи.
На основе результата сравнения привод производит некоторое действие: например, поворот, ускорение или замедление так, чтобы значение с внутреннего датчика стало как можно ближе к значению внешнего управляющего параметра.
Интерфейс управления
Чтобы указать сервоприводу желаемое состояние, по сигнальному проводу необходимо посылать управляющий сигнал — импульсы постоянной частоты и переменной ширины.
То, какое положение должен занять сервопривод, зависит от длины импульсов. Когда сигнал от микроконтроллера поступает в управляющую схему сервопривода, имеющийся в нём генератор импульсов производит свой импульс, длительность которого определяется через датчик обратной связи. Далее схема сравнивает длительность двух импульсов:
Если длительность разная, включается электромотор с направлением вращения определяется тем, какой из импульсов короче.

Если длины импульсов равны, электромотор останавливается.
Для управления хобби-сервоприводами подают импульсы с частотой 50 Гц, т.е. период равен 20 мс:
1540 мкс означает, что сервопривод должен занять среднее положение.
544 мкс — для 0°
2400 мкс — для 180°.
Обратите внимание, что на вашем конкретном устройстве заводские настройки могут оказаться отличными от стандартных. Некоторые сервоприводы используют ширину импульса 760 мкс. Среднее положение при этом соответствует 760 мкс, аналогично тому, как в обычных сервоприводах среднему положению соответствует 1520 мкс.
Это всего лишь общепринятые длины. Даже в рамках одной и той же модели сервопривода может существовать погрешность, допускаемая при производстве, которая приводит к тому, что рабочий диапазон длин импульсов отличается. Для точной работы каждый конкретный сервопривод должен быть откалиброван: путём экспериментов необходимо подобрать корректный диапазон, характерный именно для него.
Часто способ управления сервоприводами называют PWM (Pulse Width Modulation) или PPM (Pulse Position Modulation). Это не так, и использование этих способов может даже повредить привод. Корректный термин — PDM (Pulse Duration Modulation) в котором важна длина импульсов, а не частота.
Характеристики сервопривода
Рассмотрим основные характеристики сервоприводов.
Крутящий момент
Момент силы или крутящий момент показывает, насколько тяжёлый груз сервопривод способен удержать в покое на рычаге заданной длины. Если крутящий момент сервопривода равен 5 кг×см, то это значит, что сервопривод удержит на весу в горизонтальном положении рычаг длины 1 см, на свободный конец которого подвесили 5 кг. Или, что эквивалентно, рычаг длины 5 см, к которому подвесили 1 кг.
Скорость поворота
Скорость сервопривода — это время, которое требуется выходному валу повернуться на 60°. Характеристика 0,1 с/60° означает, что сервопривод поворачивается на 60° за 0,1 с.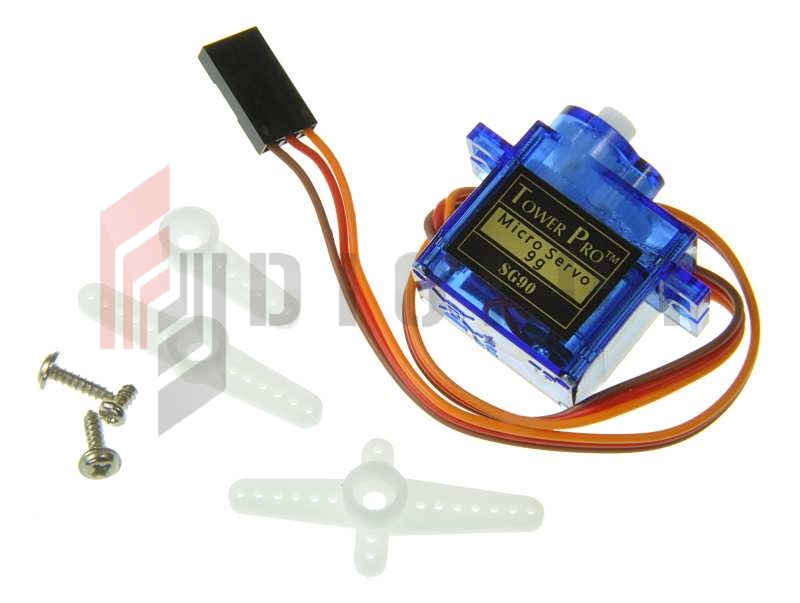 Из неё можно вычислить скорость в оборотах в минуту, но так сложилось, что при описании сервоприводов чаще всего используют именно интервал времени за 60°.
Из неё можно вычислить скорость в оборотах в минуту, но так сложилось, что при описании сервоприводов чаще всего используют именно интервал времени за 60°.
Форм-фактор
Сервоприводы различаются по размерам. И хотя официальной классификации не существует, производители давно придерживаются нескольких размеров с общепринятым расположением крепёжных элементов.
| Форм-фактор | Вес | Размеры |
|---|---|---|
| Микро | 8-25 г | 22×15×25 мм |
| Стандартный | 40-80 г | 40×20×37 мм |
| Большой | 50-90 г | 49×25×40 мм |
Внутренний интерфейс
Сервоприводы бывают аналоговые и цифровые. Так в чём же их отличия, достоинства и недостатки?
Внешне они ничем не отличаются: электромоторы, редукторы, потенциометры у них одинаковые, различаются они лишь внутренней управляющей электроникой.
Оба типа сервопривода принимают одинаковые управляющие импульсы. После этого аналоговый сервопривод принимает решение, надо ли изменять положение, и в случае необходимости посылает сигнал на мотор. Происходит это обычно с частотой 50 Гц. Таким образом получаем 20 мс — минимальное время реакции. В это время любое внешнее воздействие способно изменить положение сервопривода. Но это не единственная проблема. В состоянии покоя на электромотор не подаётся напряжение, в случае небольшого отклонения от равновесия на электромотор подаётся короткий сигнал малой мощности. Чем больше отклонение, тем мощнее сигнал. Таким образом, при малых отклонениях сервопривод не сможет быстро вращать мотор или развивать большой момент.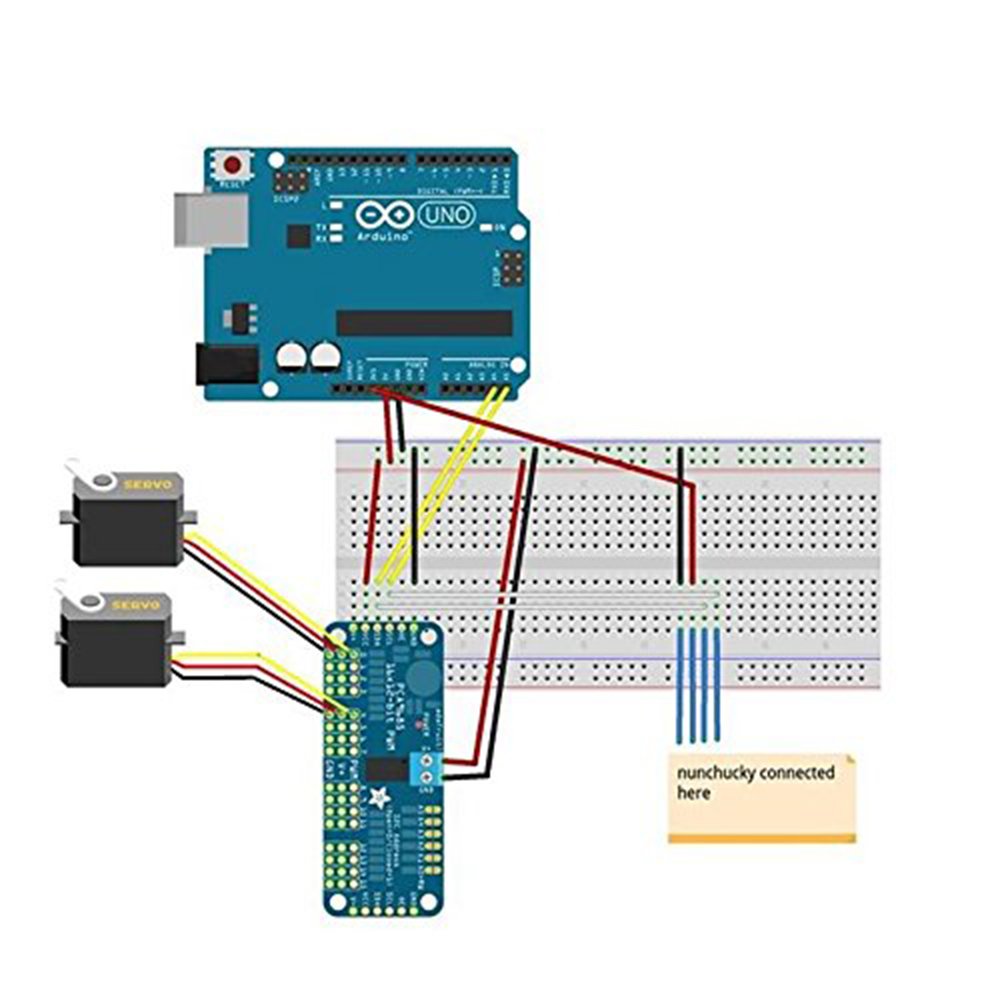
Эти проблемы можно решать за счёт увеличения частоты приёма, обработки сигнала и управления электромотором. Цифровые сервприводы используют специальный процессор, который получает управляющие импульсы, обрабатывает их и посылает сигналы на мотор с частотой 200 Гц и более. Получается, что цифровой сервопривод способен быстрее реагировать на внешние воздействия, быстрее развивать необходимые скорость и крутящий момент, а значит, лучше удерживать заданную позицию, что хорошо. Конечно, при этом он потребляет больше электроэнергии. Также цифровые сервоприводы сложнее в производстве, а потому стоят заметно дороже. Собственно, эти два недостатка — все минусы, которые есть у цифровых сервоприводов. В техническом плане они безоговорочно побеждают аналоговые сервоприводы.
Материалы шестерней
Шестерни для сервоприводов бывают из разных материалов: пластиковые, карбоновые, металлические. Все они широко используются, выбор зависит от конкретной задачи и от того, какие характеристики требуются в установке.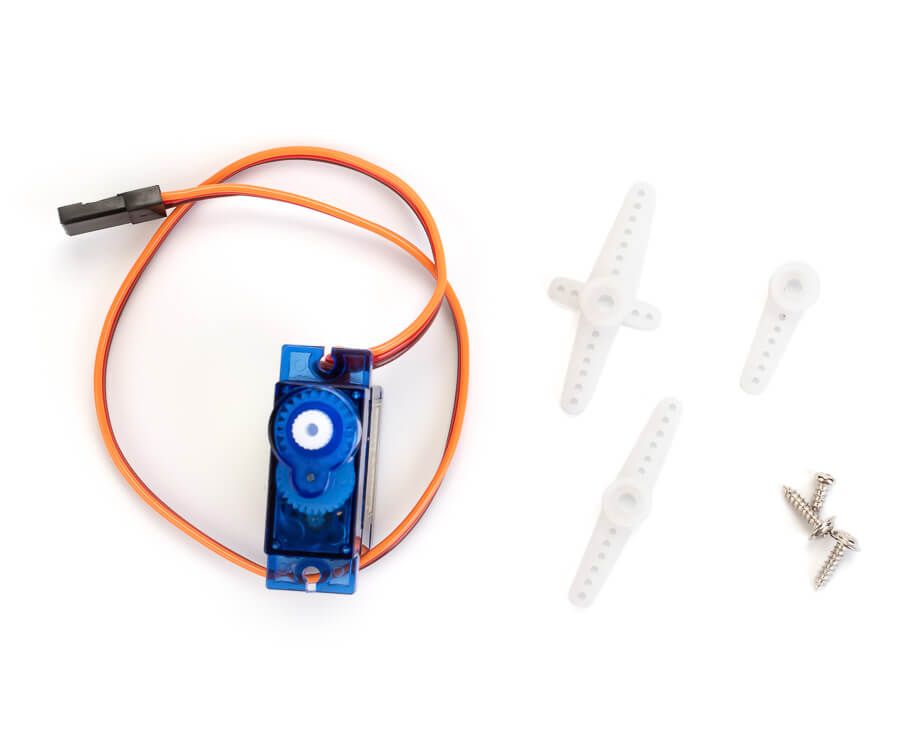
Пластиковые, чаще всего нейлоновые, шестерни очень лёгкие, не подвержены износу, более всего распространены в сервоприводах. Они не выдерживают больших нагрузок, однако если нагрузки предполагаются небольшие, то нейлоновые шестерни — лучший выбор.
Карбоновые шестерни более долговечны, практически не изнашиваются, в несколько раз прочнее нейлоновых. Основной недостатой — дороговизна.
Металлические шестерни являются самыми тяжёлыми, однако они выдерживают максимальные нагрузки. Достаточно быстро изнашиваются, так что придётся менять шестерни практически каждый сезон. Шестерни из титана — фавориты среди металлических шестерней, причём как по техническим характеристикам, так и по цене. К сожалению, они обойдутся вам достаточно дорого.
Коллекторные и бесколлекторные моторы
Существует три типа моторов сервоприводов: обычный мотор с сердечником, мотор без сердечника и бесколлекторный мотор.
Обычный мотор с сердечником (справа) обладает плотным железным ротором с проволочной обмоткой и магнитами вокруг него.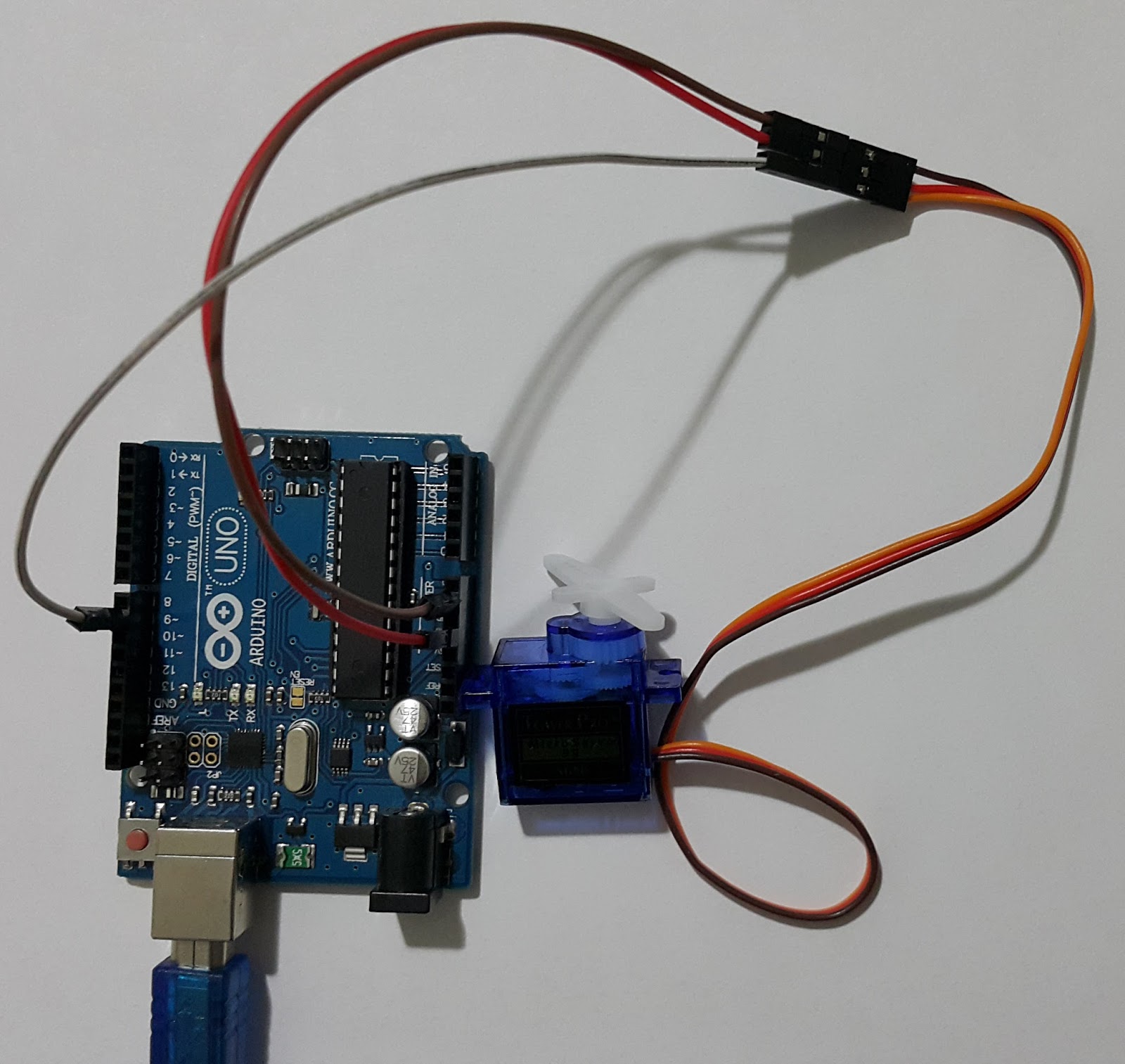 Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
Сервоприводы с бесколлекторным мотором появились сравнительно недавно. Преимущества те же что и у остальных бесколлекторных моторов: нет щёток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Сервоприводы с бесколлекторным мотором — самые дорогие сервоприводы, однако при этом они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.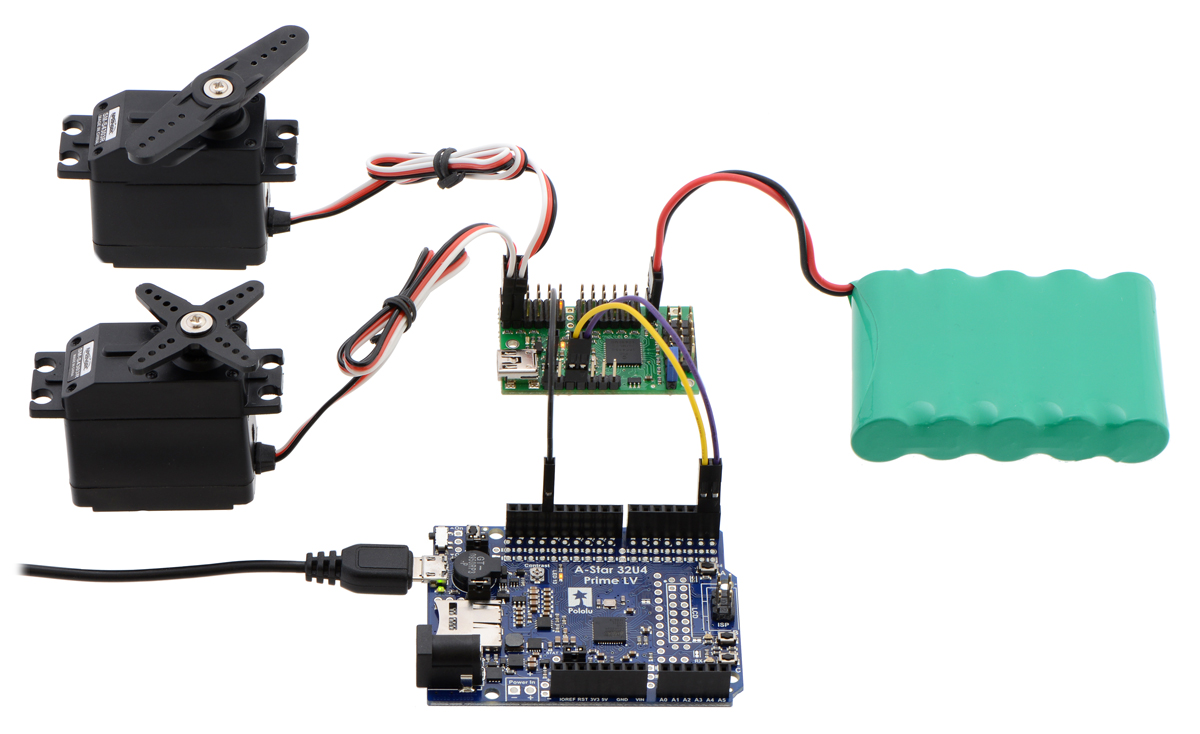
Сервопривод постоянного вращения
Сервоприводы обычно имеют ограниченный угол вращения 180 градусов, их так и называют «сервопривод 180°».
Но существуют сервоприводы с неограниченным углом поворота оси. Это сервоприводы постоянного вращения или «сервоприводы 360°».
Сервопривод постоянного вращения можно управлять с помощью библиотек Servo или Servo2. Отличие заключается в том, что функция Servo.write(angle) задаёт не угол, а скорость вращения привода:
| Функция Arduino | Сервопривод 180° | Сервопривод 360° |
|---|---|---|
| Servo.write(0) | Крайне левое положение | Полный ход в одном направлении |
| Servo.write(90) | Середнее положение | Остановка сервопривода |
| Servo.write(180) | Крайне правое положение | Полный ход в обратном направлении |
Для иллюстрации работы с сервами постоянного вращения мы собрали двух мобильных ботов — на Arduino Uno и Iskra JS. Инструкции по сборке и примеры скетчей смотрите в статье собираем ИК-бота.
Инструкции по сборке и примеры скетчей смотрите в статье собираем ИК-бота.
Примеры работы с Arduino
Схема подключения
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
красный — питание; подключается к контакту
5Vили напрямую к источнику питаниякоричневый или чёрный — земля
жёлтый или белый — сигнал; подключается к цифровому выходу Arduino.
Для подключения к Arduino будет удобно воспользоваться платой-расширителем портов, такой как Troyka Shield. Хотя с несколькими дополнительными проводами можно подключить серву и через breadboard или непосредственно к контактам Arduino.
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека Servo.
Ограничение по питанию
Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
Рассмотрим на примере подключения 12V сервопривода:
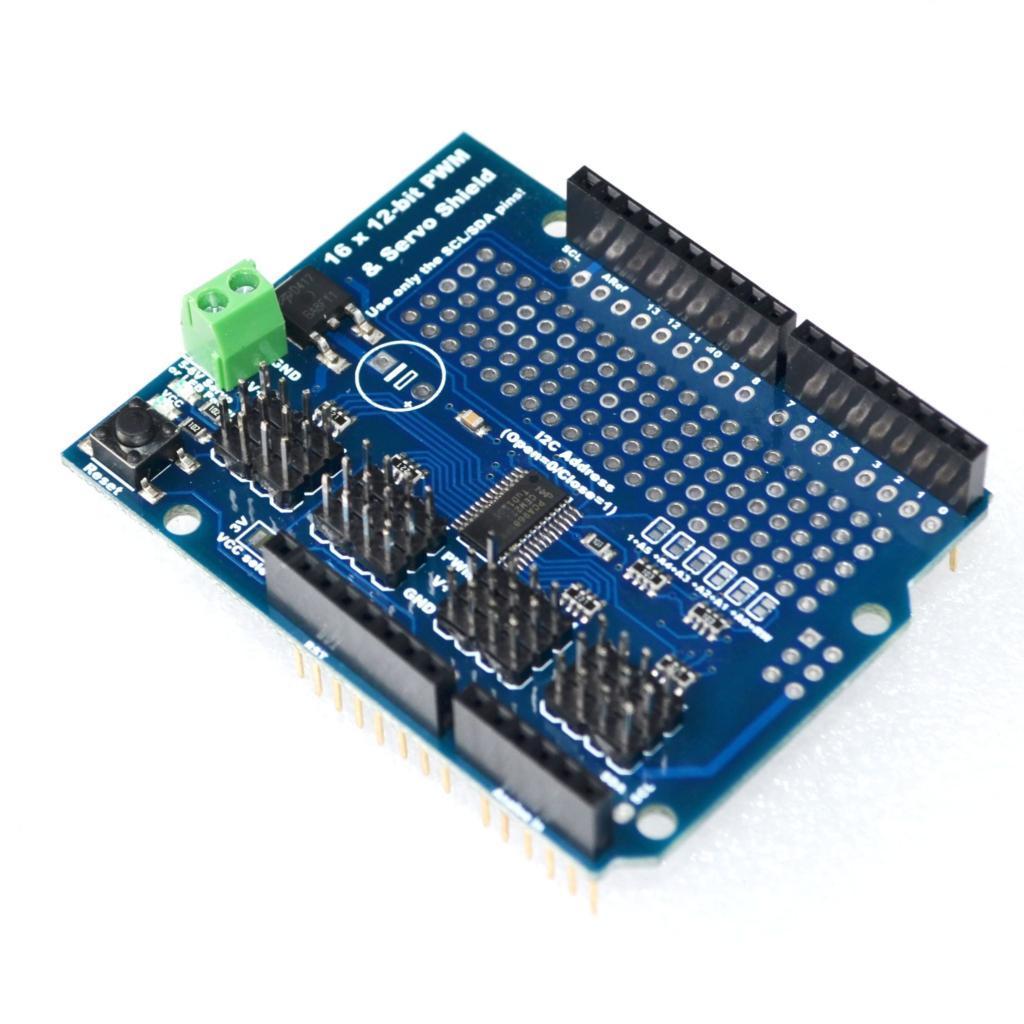
Ограничение по количеству подключаемых сервоприводов
На большинстве плат Arduino библиотека Servo поддерживает управление не более 12 сервоприводами, на Arduino Mega это число вырастает до значения 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite() на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite() на 11 и 12 контактах.
Пример использования библиотеки Servo
- servo_example.
 ino
ino // подключаем библиотеку для работы с сервоприводами #include <Servo.h> // создаём объект для управления сервоприводом Servo myservo; void setup() { // подключаем сервопривод к 9 пину myservo.attach(9); } void loop() { // устанавливаем сервопривод в серединное положение myservo.write(90); delay(500); // устанавливаем сервопривод в крайнее левое положение myservo.write(0); delay(500); // устанавливаем сервопривод в крайнее правое положение myservo.write(180); delay(500); }
По аналогии подключим 2 сервопривода
- 2servo_example.ino
// подключаем библиотеку для работы с сервоприводами #include <Servo.h> // создаём объекты для управления сервоприводами Servo myservo1; Servo myservo2; void setup() { // подключаем сервоприводы к 11 и 12 пину myservo1.attach(11); myservo2.attach(12); } void loop() { // устанавливаем сервопривод в серединное положение myservo1.write(90); myservo2. write(90);
delay(500);
// устанавливаем сервопривод в крайнее левое положение
myservo1.write(0);
myservo2.write(0);
delay(500);
// устанавливаем сервопривод в крайнее правое положение
myservo1.write(180);
myservo2.write(180);
delay(500);
}
write(90);
delay(500);
// устанавливаем сервопривод в крайнее левое положение
myservo1.write(0);
myservo2.write(0);
delay(500);
// устанавливаем сервопривод в крайнее правое положение
myservo1.write(180);
myservo2.write(180);
delay(500);
}
Библиотека Servo не совместима с библиотекой VirtualWire для работы с приёмником и передатчиком на 433 МГц.
Альтернативная библиотека Servo2
Библиотеки для управления сервоприводами (Servo) и для работы с приёмниками / передатчиками на 433 МГц VirtualWire используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2.
Все методы библиотеки Servo2 совпадают с методами Servo.
Пример использования библиотеки Servo
- servo2_example.ino
// подключаем библиотеку для работы с сервоприводами // данная библиотека совместима с библиотекой «VirtualWire» // для работы с приёмником и передатчиком на 433 МГц #include <Servo2.
 h>
// создаём объект для управления сервоприводом
Servo2 myservo;
void setup()
{
// подключаем сервопривод к 9 пину
myservo.attach(9);
}
void loop()
{
// устанавливаем сервопривод в серединное положение
myservo.write(90);
delay(500);
// устанавливаем сервопривод в крайнее левое положение
myservo.write(0);
delay(500);
// устанавливаем сервопривод в крайнее правое положение
myservo.write(180);
delay(500);
}
h>
// создаём объект для управления сервоприводом
Servo2 myservo;
void setup()
{
// подключаем сервопривод к 9 пину
myservo.attach(9);
}
void loop()
{
// устанавливаем сервопривод в серединное положение
myservo.write(90);
delay(500);
// устанавливаем сервопривод в крайнее левое положение
myservo.write(0);
delay(500);
// устанавливаем сервопривод в крайнее правое положение
myservo.write(180);
delay(500);
}
Примеры работы с Espruino
Примеры работы с Raspberry Pi
Вывод
Сервоприводы бывают разные, одни получше — другие подешевле, одни надёжнее — другие точнее. И перед тем, как купить сервопривод, стоит иметь в виду, что он может не обладать лучшими характеристиками, главное, чтобы подходил для вашего проекта. Удачи в ваших начинаниях!
Ресурсы
С помощью программы ServoStudio 12 и платы Arduino можно создать своего робота, не написав единой строчки кода
Наверное многие из тех, кто открыл для себя мир электроники, рано или поздно задумываются о том чтоб создать некого своего робота, либо просто бытовую автоматику или радиоуправляемые модели. Но если с механикой было все более-менее понятно – то разработка программы для управления таким устройством, в котором слажено должны работать большое количество сервоприводов, вызывала не мало сложностей. Программно–аппаратный комплекс ServoStudio 12 как раз позволит управлять таким устройством, управлять одновременно 12 сервоприводами, создавать последовательности движений при помощи визуального редактора. Также данный комплекс станет удобным инструментом при отладке механики устройства и создания своей программы.
Но если с механикой было все более-менее понятно – то разработка программы для управления таким устройством, в котором слажено должны работать большое количество сервоприводов, вызывала не мало сложностей. Программно–аппаратный комплекс ServoStudio 12 как раз позволит управлять таким устройством, управлять одновременно 12 сервоприводами, создавать последовательности движений при помощи визуального редактора. Также данный комплекс станет удобным инструментом при отладке механики устройства и создания своей программы.
При необходимости, созданную последовательность движений можно экспортировать как скетч Arduino IDE, для автономной работы, без ПК. Либо просто как массив значений ключевых точек для дальнейшего использования в своей программе. ServoStudio 12 обладает интуитивно понятным интерфейсом и разобраться в ней может даже новичок. А использование платы Arduino в качестве исполнительного устройства управления – сделало данную систему легко доступной в повторении и изготовлении.
Немного предыстории. Вдохновившись идеей создания удобного тестера сервоприводов от Сергея Грищенко, я решил создать свою систему, которая была б проста в использовании и одновременно удобна и функциональна. В отличии от вышеуказанного тестера сервоприводов, за все управление отвечает программное обеспечение ServoStudio 12, на персональном компьютере, и плата Arduino поддерживает работу до 12 сервоприводов одновременно. Аппаратная часть же являет собой широко распространённую плату Arduino Nano либо Arduino Uno. Так же данное ПО додерживает работу с вышеуказанным тестером сервоприводов.
Изначально планировал создать небольшую программу, в которой бы по очереди воспроизводилась последовательность значений управляющего сигнала сервоприводов, но по ходу разработки у меня появлялись новые идеи, и простая программа переросла в полноценный блок управления механикой робота, с возможностью установки скорости перемещений и воспроизведением движений при помощи горячих клавиш.
Сервопривод – в отличии от коллекторного мотора, позволяет делать поворот на определенный угол. Угол поворота задается шириной импульсов управляющего сигнала. Ширина этих импульсов может меняться в пределах 800 – 2300 мкс.
Для начала работы нам потребуется следующее:
- Плата Arduino Nano/Uno.
- Arduino IDE, чтоб запрограммировать данную плату.
- И ПО ServoStudio 12.
Схема подключения очень проста. Выводы D2-D13 подключаются к управляющим входам сервоприводов. Питание подключается к выводам питания Arduino.
При большом потреблении тока сервоприводами- необходимо подключить внешний источник питания.Первым делом в меню программы ServoStudio 12 необходимо выбрать пункт «Генератор кода» и подпункт «Создать скетч ServoStudio HardWare», сохранить данный скетч на диск и открыть в Arduino IDE и залить в Arduino Nano/Uno. Все, аппаратная часть готова! Данное действие производится всего один раз, с новой платой Arduino.
Для начала работы необходимо создать новый проект (меню Файл / Новый). В диалоговом окне выбрать необходимое количество ШИМ каналов (количество сервоприводов), выбрать тип платы тестера и написать имя своего устройства (для удобства).
Теперь об интерфейсе программы
В нижней части расположены инструменты для создания последовательности ключевых точек. Перемещая ползунки регуляторов для соответствующих каналов задается значение ширины импульсов управляющего сигнала (угол поворота сервопривода) на соответствующем канале. Если установить флажок «управлять в реальном времени»- то при перемещении ползунка регулятора будет двигаться сервопривод, подключённый к данному каналу, что очень удобно, так как сразу наглядно видно положение привода в данной точке. После того как установили управляющий сигнал на всех необходимых каналах, нужно создать следующий «кадр» (следующую ключевую точку), при помощи кнопки «Добавить». И таким же образом, при помощи регуляторов, создать новую ключевую точку, и так сколько необходимо. Время, за которое сервоприводы должны повернуться на данный угол, выставляется для каждого кадра отдельно, в поле «время шага», время задается в миллисекундах. Чем больше данное значение– тем медленнее будет перемещение, чем меньше– тем быстрее. В поле «шаг» отображается текущий кадр последовательности. При необходимости, изменяя номер шага в данном поле, можно отредактировать предыдущие шаги. Для удобства, имена каналов можно менять, кликнув 2 раза на названии канала, слева от регулятора.
Время, за которое сервоприводы должны повернуться на данный угол, выставляется для каждого кадра отдельно, в поле «время шага», время задается в миллисекундах. Чем больше данное значение– тем медленнее будет перемещение, чем меньше– тем быстрее. В поле «шаг» отображается текущий кадр последовательности. При необходимости, изменяя номер шага в данном поле, можно отредактировать предыдущие шаги. Для удобства, имена каналов можно менять, кликнув 2 раза на названии канала, слева от регулятора.
В Верхней части, на графике, визуально отображается изменение ширины управляющего сигнала сервоприводов.
И когда создано какое-то законченное движение (например, шаг вперед), можно сохранить текущую последовательность как отдельную законченную последовательность, нажав кнопку «добавить» на панели «Последовательности», в правой части окна программы. Можно на пример создать несколько последовательностей, для движения вперед, назад, влево, вправо, итд. И эти последовательности можно воспроизводить независимо друг от друга, по двойному щелчку мыши, или из контекстного меню, а также из окна «пульт управления» (но об этом позже). Таким образом, воспроизводя эти последовательности, осуществляется управление устройством (роботом). Так же можно добавлять сохраненные последовательности в основную последовательность, создавая одну большую последовательность действий. Это может быть очень полезно для демонстрации работы устройства.
Таким образом, воспроизводя эти последовательности, осуществляется управление устройством (роботом). Так же можно добавлять сохраненные последовательности в основную последовательность, создавая одну большую последовательность действий. Это может быть очень полезно для демонстрации работы устройства.
Так же основную последовательность (которая в данный момент открыта в редакторе), можно экспортировать как скетч для Arduino IDE, для автономного воспроизведения платой Arduino, без участия ПК. Для этого в меню «Генератор кода» необходимо выбрать пункт «Экспорт последовательности» и в диалоговом окне нажать кнопку «Генерировать», после чего данный скетч можно скопировать в буфер обмена, либо сохранить как скетч для Arduino IDE. Дальше этот скетч можно залить обычным образом в контроллер платы Arduino.
Есть возможность воспроизводить данную последовательность циклично либо только один раз, установкой или снятием флажка «повторять циклично». Так же есть возможность экспорта в массив ключевых точек, это может быть полезно, если у вас уже есть своя программа для микроконтроллера и Вам необходимо в ней задать движения, при чем опционально можно добавлять в массив значения времени установки позиции, при помощи установки соответствующего флажка. Если, после прошивки данным скетчем, плату Arduino нужно опять использовать с программой ServoStudio 12 то необходимо опять в меню выбрать пункт «Генератор кода» и подпункт «Создать скетч ServoStudio HardWare», сохранить данный скетч на диск и открыть в Arduino IDE и залить в Arduino Nano/Uno.
Если, после прошивки данным скетчем, плату Arduino нужно опять использовать с программой ServoStudio 12 то необходимо опять в меню выбрать пункт «Генератор кода» и подпункт «Создать скетч ServoStudio HardWare», сохранить данный скетч на диск и открыть в Arduino IDE и залить в Arduino Nano/Uno.
Окно «пульт управления»
Позволяет использовать горячие клавиши для воспроизведения отдельных последовательностей. Для начала нужно нажать кнопку «Назначить клавиши», выбрать из выпадающего списка необходимую последовательность и назначить ей горячую клавишу. Когда все установлено- необходимо нажать кнопку «Запомнить». Теперь, пока открыто это окно, при нажатии на горячую клавишу будет воспроизводится назначенная ей последовательность.
Не маловажным есть пункт меню «Исходная позиция» — это положение сервоприводов при включении, либо просто «нормальное положение» для угла поворота сервоприводов. Другими словами, если не хотите, чтоб вашего робота перекосило при включении нужно регуляторами выбрать для него оптимальное положение и выбрать пункт меню «Записать текущий кадр в EEPROM Arduino как исходную позицию», данная функция доступна только для плат Arduino. Так же есть пункты «Записать текущий кадр как исходную позицию» и «Вставить исходную позицию в текущий кадр», это будет очень полезно, если нужно начать новую последовательность и исходной точки. Исходная позиция сохраняется в файле проекта и доступна при открытии файла, так что её не нужно будет заново подбирать.
Так же есть пункты «Записать текущий кадр как исходную позицию» и «Вставить исходную позицию в текущий кадр», это будет очень полезно, если нужно начать новую последовательность и исходной точки. Исходная позиция сохраняется в файле проекта и доступна при открытии файла, так что её не нужно будет заново подбирать.
В программе есть так же возможность ассоциировать файлы проекта с ServoStudio 12. Для этого ее нужно 1 раз запустить с правами администратора. ServoStudio 12 – полностью Portable, состоит из 1 файла (при закрытии программы еще создается файл последнего открытого проекта) и не требует установки.
Более подробно о работе можно посмотреть в видео.
Ссылка на скачивание ПО ServoStudio 12
Немного о планах на будущее:
- Хочу создать приложение для Android, которое могла б открывать файл проекта и можно б было использовать телефон для управления роботом. Управление осуществлять по BlueTooth или WiFi через TCP-UART переходник.
- Так же хочу создать версию на большее количество каналов, для управления более сложными устройствами.

- Добавить обработку сигналов с подключённых датчиков (на пример если впереди препятствие- обойти его).
- Добавить возможность управления цифровыми выходами (на пример для включения светодиодов или чего-то другого)
Но останутся ли эти планы только планами либо выйдут в следующем релизе программы – на прямую зависит от интереса к данному комплексу.
Манипулятор с захватом 2 DOF [База знаний “УмныеЭлементы”]
Описание
Набор предназначен для самостоятельной сборки манипулятора на 2 степени свободы с механическим захватом. Первая степень отвечает за наклон захвата, вторая непосредственно отвечает за работу захвата. С помощью захвата можно перемещать различные предметы. Максимальная рабочая ширина захвата 55 мм. Манипулятор может быть установлен на шасси робота.
Манипулятор приводится в движение с помощью сервоприводов. Всего в данном манипуляторе их используется 2. Чем мощнее сервоприводы, тем больший груз сможет переместить манипулятор. Например, при использовании сервоприводов с крутящим моментом около 10 кг⋅см – грузоподъемность захвата будет около 300 грамм. Мы специально не стали добавлять сервоприводы в данный набор, чтобы каждый смог подобрать их под свои индивидуальные требования.
Например, при использовании сервоприводов с крутящим моментом около 10 кг⋅см – грузоподъемность захвата будет около 300 грамм. Мы специально не стали добавлять сервоприводы в данный набор, чтобы каждый смог подобрать их под свои индивидуальные требования.
Для работы с манипулятором подойдут сервоприводы стандартного типоразмера 54х20 мм с 4 посадочными отверстиями 50х10 мм. К таковым относятся MG995, MG996R, S3003, DS04-NFC 360, TD8120 и многие другие. Подбор сервоприводов должен осуществляться на основе необходимых требований к грузоподъемности, причем чем больше рабочее плечо, тем мощнее должен быть сервопривод. Например, для работы захвата может быть использован менее мощный сервопривод, а для его наклона потребуется наоборот более мощный, поскольку рабочее плечо уже будет больше.
Максимальная длина манипулятора составляет 21 см.
Манипулятор выполнен из сплава алюминия с нанесенным защитным покрытием. Общий вес манипулятора без сервоприводов составляет 140 г.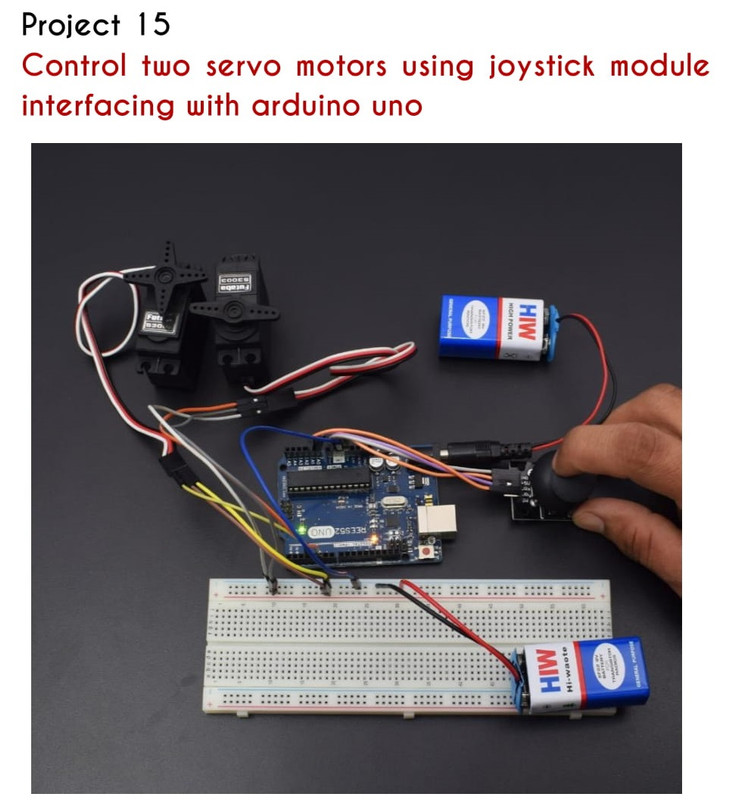
Набор для сборки манипулятора выполнен в формате конструктора, все его детали можно комбинировать друг с другом в различном порядке и последовательности, отличном от стандартной конструкции. Вы сможете добавить дополнительные новые элементы или наоборот убрать ненужные.
Обратите внимание, что при использовании мощных сервоприводов потребуется внешнее питание – подключать все сервоприводы напрямую к контроллеру небезопасно. Требуемая мощность источника тока определяется на основе выбранных вами сервоприводов.
Для управления манипулятором можно использовать любой контроллер, в том числе и Arduino. Для удобства работы с Arduino Uno и Arduino Mega используйте модуль джойстика – с его помощью можно управлять манипулятором вручную. Также вы можете задать программно определенный алгоритм работы манипулятора без ручного управления.
Комплектация
комплект деталей для сборки манипулятора x1
инструкция по сборке х1
пакет упаковочный х1
Сервоприводы в комплект не входят.

Ресурсы для загрузки:
Пример работы с манипулятором
Пример №1
Описание: В примере управление сервоприводами манипулятора производится с помощью модуля джойстика. Каждое изменение положения джойстика, влияет на поворот сервопривода.
Для примера понадобится:
#include <Servo.h> // подключение библиотеки для работы с сервоприводом
#define SERVOS_COUNT 2 // количество сервоприводов
Servo myservos[SERVOS_COUNT]; // создание объектов для работы с сервоприводами
int servos_pins[SERVOS_COUNT] = {6, 5}; // выводы подключения сервоприводов
int joy_pins[SERVOS_COUNT] = {A0, A1}; // выводы подключения джойстика
void setup() {
for (byte i = 0; i < SERVOS_COUNT; i++) { // цикл по количеству сервоприводов
myservos[i].attach(servos_pins[i], 500, 2500); // подключение и инициализация сервоприводов
}
}
void loop() {
for (byte i = 0; i < SERVOS_COUNT; i++) { // в цикле:
int ang = analogRead(joy_pins[i]); // получить текущее значение от джойстика
ang = map(ang, 0, 1024, 0, 180); // ограничить значение от 0 до 180
myservos[i]. write(ang); // повернуть сервопривод на полученное значение
}
}
write(ang); // повернуть сервопривод на полученное значение
}
}Минусом данного варианта управления джойстиком является то, что когда джойстик возвращается «домой», сервопривод повторяет его движение. Таким образом невозможно зафиксировать положение манипулятора. Исправить эту особенность мы постараемся в примере №2.
Пример №2
Описание: В примере управление сервоприводами манипулятора производится с помощью модуля джойстика. Каждое изменение положения джойстика, влияет на поворот сервопривода, но при этом одно сервопривод фиксируется в определённом положении. Каждое движение джойстика, поворачивает сервопривод на ту или иную позицию.
Для примера понадобится:
#include <Servo.h> // подключение библиотеки для работы с сервоприводом
#define SERVOS_COUNT 2 // количество сервоприводов
Servo myservos[SERVOS_COUNT]; // создание объектов для работы с сервоприводами
int servos_pins[SERVOS_COUNT] = {6, 5}; // выводы подключения сервоприводов
int joy_pins[SERVOS_COUNT] = {A0, A1}; // выводы подключения джойстика
int angs[SERVOS_COUNT] = {90, 90}; // хранение текущих углов поворота
void setup() {
Serial. begin(9600); // инициализация сериал порта для вывода отладочной информации
for (byte i = 0; i < SERVOS_COUNT; i++) { // в цикле
myservos[i].attach(servos_pins[i], 500, 2500); // подключение сервопривода
}
}
void loop() {
for (byte i = 0; i < SERVOS_COUNT; i++) { // в цикле (по количеству сервоприводов)
int x = analogRead(joy_pins[i]); // получение текущей позиции джойстика
int new_ang = angs[i]; // чтение текущего угла поворота сервопривода
if (x < 100) { // если значение джойстика меньше 100
new_ang += 1; // увеличить угол на 1 градус
} else if (x > 924) { // если значение джойстика больше 924
new_ang -= 1; // уменьшить угол на 1 градус
} else { // иначе
continue; // считается что джойстик не двигался
}
if (i == 0) { // если это первый сервопривод (сам захват)
new_ang = constrain(new_ang, 80, 145); // то ограничить угол между 80 и 145 градусами
} else { // иначе
new_ang = constrain(new_ang, 0, 180); // ограничить между 0 и 180
}
if (new_ang != angs[i]) { // если новый угол отличается от старого
angs[i] = new_ang; // зафиксировать новое значение
Serial.
begin(9600); // инициализация сериал порта для вывода отладочной информации
for (byte i = 0; i < SERVOS_COUNT; i++) { // в цикле
myservos[i].attach(servos_pins[i], 500, 2500); // подключение сервопривода
}
}
void loop() {
for (byte i = 0; i < SERVOS_COUNT; i++) { // в цикле (по количеству сервоприводов)
int x = analogRead(joy_pins[i]); // получение текущей позиции джойстика
int new_ang = angs[i]; // чтение текущего угла поворота сервопривода
if (x < 100) { // если значение джойстика меньше 100
new_ang += 1; // увеличить угол на 1 градус
} else if (x > 924) { // если значение джойстика больше 924
new_ang -= 1; // уменьшить угол на 1 градус
} else { // иначе
continue; // считается что джойстик не двигался
}
if (i == 0) { // если это первый сервопривод (сам захват)
new_ang = constrain(new_ang, 80, 145); // то ограничить угол между 80 и 145 градусами
} else { // иначе
new_ang = constrain(new_ang, 0, 180); // ограничить между 0 и 180
}
if (new_ang != angs[i]) { // если новый угол отличается от старого
angs[i] = new_ang; // зафиксировать новое значение
Serial.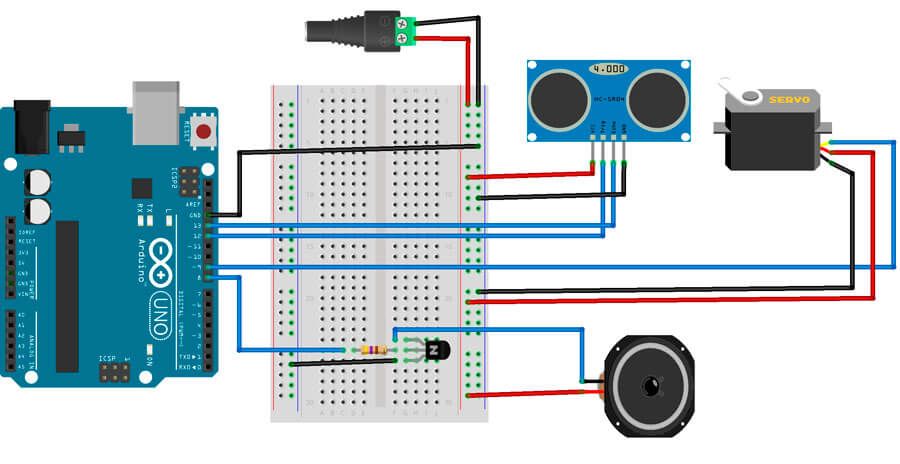 print("New ang joy #"); // вывести отладочную информацию
Serial.print(i); // вывести отладочную информацию
Serial.print(" is "); // вывести отладочную информацию
Serial.println(new_ang); // вывести отладочную информацию
myservos[i].write(new_ang); // повернуть сервопривод на новый угол
}
}
}
print("New ang joy #"); // вывести отладочную информацию
Serial.print(i); // вывести отладочную информацию
Serial.print(" is "); // вывести отладочную информацию
Serial.println(new_ang); // вывести отладочную информацию
myservos[i].write(new_ang); // повернуть сервопривод на новый угол
}
}
}класс по робототехнике «Управление сервоприводом через потенциометр»
Всем привет! В этой статье мы научим вас управлять сервоприводом SG90 через Потенциометр!
Краткая справка:
Сервопривод – электромеханический мотор, который имеет выходной вал, способный вращаться вокруг своей оси. Мы в своих проектах используем сервоприводы SG90, в роборуке, например, таких аж 4 штуки! Такое сервопривод имеет пластиковый редуктор, из-за чего при большом усилии шестеренки могут сломаться, поэтому лучше не проворачивайте выходной вал мотора вручную, а используйте для этого команды с микроконтроллера:)
Потенциометр – (он же реостат) – резистор с переменным сопротивлением. Вращая ручку потенциометра, можно менять размер проводящего участка, таким образом меняя сопротивление элемента. Собственно, принцип сегодняшнего мастер-класса будет основан на считывании положения ручки потенциометра и в перевод полученного значения в угол Сервомотора.
Вращая ручку потенциометра, можно менять размер проводящего участка, таким образом меняя сопротивление элемента. Собственно, принцип сегодняшнего мастер-класса будет основан на считывании положения ручки потенциометра и в перевод полученного значения в угол Сервомотора.
Для работы нам понадобятся:
– макетная плата
– плата Arduino Nano
– 6 проводов «Папа-Папа»
– Потенциометр на 100 кОм
– Сервопривод SG90
Для начала, соберем схему подключения Сервопривода к плате Arduino Nano. Крайние контакты потенциометра необходимо подключить на контакты 5V и GND на плате (какой из крайних куда не принципиально). Центральный контакт, который как раз подключен к вращающейся ручке потенциометра, подключаем на любой из аналоговых пинов Arduino, мы подключили на пин A0. Схема подключения выглядит так:
В реальной жизни, выглядит так:
Отлично! Теперь нам необходимо написать программу для считывания показаний потенциометра через аналоговый пин A0.
Теперь, когда мы умеем извлекать данные с потенциометра, давайте научимся переводить их в углы для сервомотора. Для этого подключим к нашей схеме Сервомотор.
Фото схемы:
Для управление сервой, необходимо написать код, который будет переводить показания от потенциометра (0 – 1023) в углы Сервомотора (0 – 90 градусов).
Для этого вводим переменную «Коэффициент», равную отношению «Максимального значения потенциометра» к «Максимальному углу сервомотора». В цикл добавляем команду управление сервомотором, угол определяем как считанное значение потенциометра скорректированное (поделенное) на «Коэффициент». Готовый скетч можно скачать по ссылке.
Готово! Теперь при вращении ручки потенциометра, мы вращаем выходной вал Сервомотора! Для того, чтобы наглядно показать практическую пользу от мастер-класса, мы решили подключить к схеме сервопривод, отвечающий за клешню нашей Роборуки.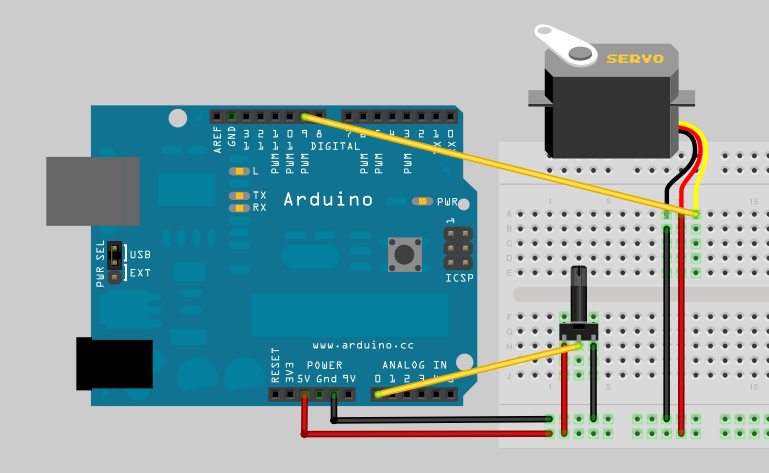 Вот как это выглядит:
Вот как это выглядит:
Если вы хотите повторить всё проделанное самостоятельно – все необходимые компоненты есть в нашем курсе «Легкий Старт»
Если хотите попробовать немного попрограммировать RobotON Studio – регистрируйтесь на бесплатное занятие:)
Дом Знаний
Станьте специалистом в сфере Internet of things (IoT) с нуля и создайте сеть умных гаджетов. Изучите С, механизмы отладки и программирования микроконтроллеров. Вы получите опыт применения технологий Wi-Fi, Bluetooth для построения современных встраиваемых систем.
________________________________________
Урок 1
Знакомимся с Arduino
Основные элементы конструктора Arduino UNO
Редактор программ Arduino IDE
Основы программирования
Подключение светодиода
Урок 2
Изучаем схемотехнику
Базовые элементы для создания схем
Работа с цифровыми и аналоговыми входами
Построение первой схемы
Проект «Светофор»
Кнопки и потенциометры
Урок 3
Делаем проект умное мусорное ведро
Принцип работы ультразвукового датчика расстояния
Подключение датчика расстояния
Принцип работы сервопривода
Разработка корпуса умного мусорного ведра
Урок 4
Проект умная дверь
Шаговый двигатель
Подключение шагового двигателя к драйверу
Управление с помощью комбинаций
Работа с управлением с помощью пароля
Урок 5
Проект сигнализация
Принцип работы фоторезистором
Управление с помощью света
Оптика
Управление пищалкой
Урок 6
Проект автомат для напитков
Работа с реле
Работа с потенциометром
Работа с лед дисплеем
Урок 7
Продолжаем проект автомат для напитков
Управление моторчиками
Подключение светодиода
ШИМ- широтно-импульсная модуляция
Работа с сервоприводом
Урок 8
Мозговой шторм (придумываем проекты для самостоятельной работы)
Повторяем пройденные уроки
Обсуждаем идеи будущего проекта
Начинаем делать свои проекты
Урок 9
Работа над личными проектами
Обзор и анализ личных проектов
Дорабатываем проект и подводим итоги
Исправляем возможные ошибки
Готовимся к презентации проекта
Урок 10
Презентация проекта
На последнем занятии ребята показывают свои проекты. Все ученики получат цифровые сертификаты о прохождении обучения.
Все ученики получат цифровые сертификаты о прохождении обучения.
Сервопривод SG90
Сервопривод SG90 используется в основном для управления небольшими легкими механизмами, угол поворота которых ограничен диапазоном от 0 до 180 градусов.
Технические характеристики
| Рабочее напряжение | 4.8В (5В) |
| Угол поворота | 0…1805В° |
| Угловая скорость | 1 сек/60° |
| Материал шестеренок | пластмасса |
| Рекомендуемый драйвер | |
| Размеры устройства | 22мм x 11.5мм x 22.5мм |
| Вес | 9 грамм |
| Температура использования | от -0 до +55°С |
Подключение сервопривода
| Коричневый провод | Земля (подключается к пину GND на плате Arduino) |
| Красный провод | Питание +5 V (подключается к пину 5V на плате Arduino) |
| Желтый провод | Сигнал управления (подключается к цифровому пину Arduino) |
Сложности при работе с сервоприводами
Недорогие сервоприводы не обеспечивают точных настроек начальной и конечной позиций.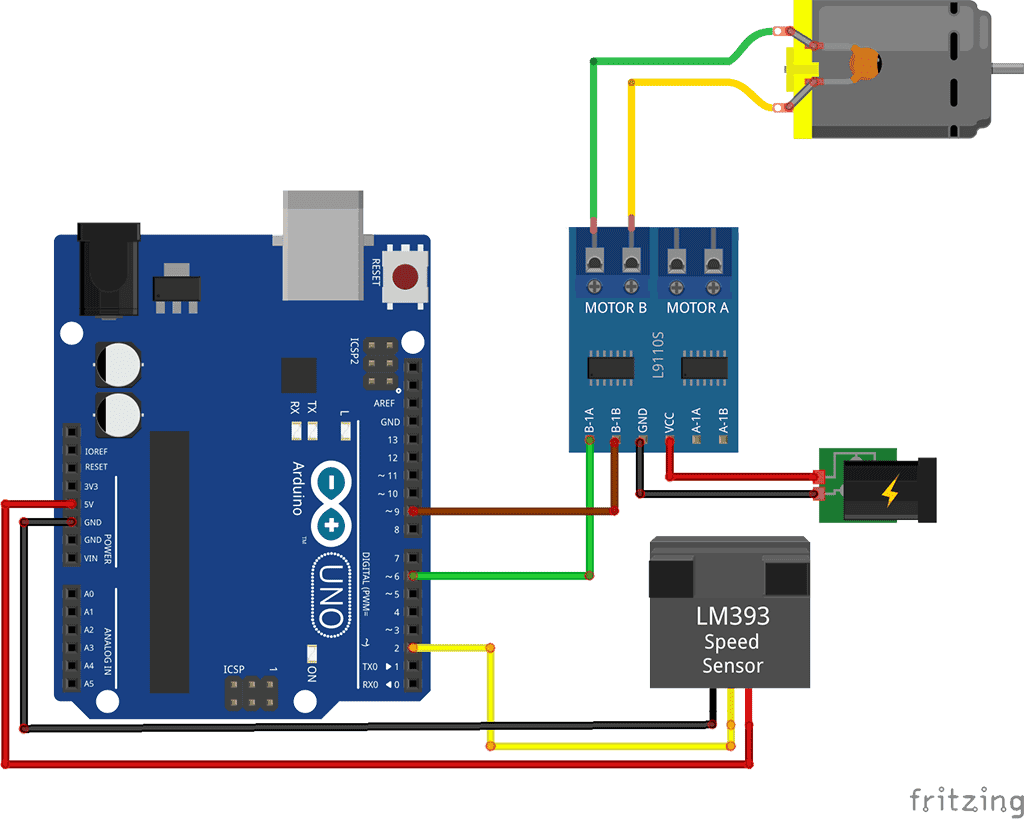 Часто в положении 0 и 180 градусов слышен характерный треск или жужжание. Это говорит о том, что механическая часть сервопривода уже находиться в предельной позиции, но датчик считает, что заданная позиция еще не достигнута.
Часто в положении 0 и 180 градусов слышен характерный треск или жужжание. Это говорит о том, что механическая часть сервопривода уже находиться в предельной позиции, но датчик считает, что заданная позиция еще не достигнута.
Проблему можно решить подбором скорректированных позиций. Например, часто вместо позиции 0 градусов нужно использовать позицию поворота сервопривода в 10-15 градусов, а конечную 165-170 градусов. Это позволит избежать лишних перегрузок и шума при достижении крайних точек.
Следует обращать внимание на напряжение, которое используется при работе сервопривода. Если значение напряжения превышает допустимые значения из технических характеристик сервопривода, механические части могут выйти из строя или зубчатые колеса сервопривода провернутся в положение превышающее максимальные значения и механизм не сможет продолжать движение в обратном направлении. Иными словами, завышенное напряжение скорее всего не приведет к сгоранию мотора сервопривода, но повредит механические части зубчатых механизмов.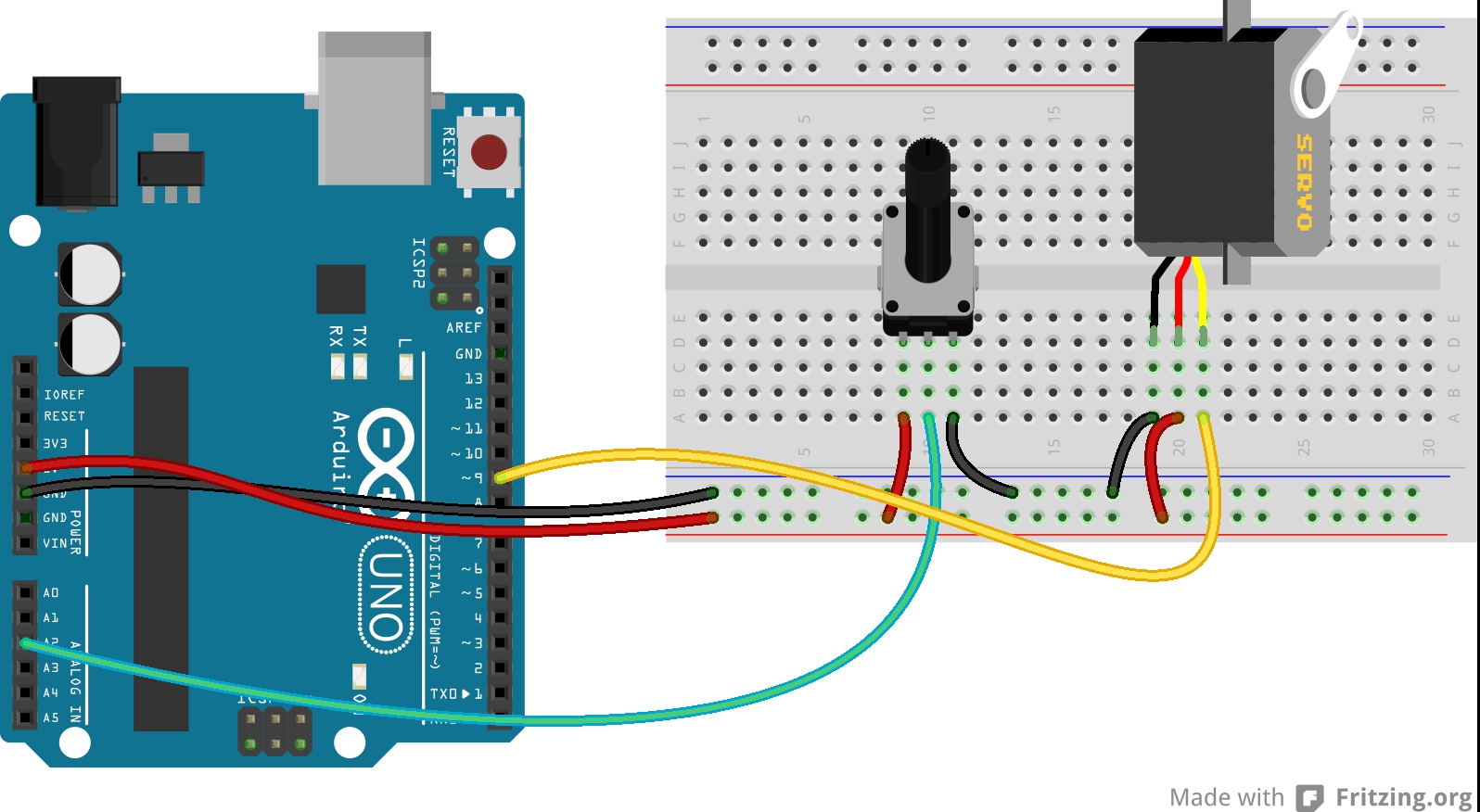
С помощью программы ServoStudio 12 и платы Arduino можна создать своего робота, не написав единой строчки кода
Наверное многие из тех, кто открыл для себя мир электроники, рано или поздно задумываются о том чтоб создать некого своего робота, либо просто бытовую автоматику или радиоуправляемые модели. Но если с механикой было все более-менее понятно – то разработка программы для управления таким устройством, в котором слажено должны работать большое количество сервоприводов, вызывала не мало сложностей. Программно–аппаратный комплекс ServoStudio 12 как раз позволит управлять таким устройством, управлять одновременно 12 сервоприводами, создавать последовательности движений при помощи визуального редактора. Также данный комплекс станет удобным инструментом при отладке механики устройства и создания своей программы.
При необходимости, созданную последовательность движений можно экспортировать как скетч Arduino IDE, для автономной работы, без ПК. Либо просто как массив значений ключевых точек для дальнейшего использования в своей программе. ServoStudio 12 обладает интуитивно понятным интерфейсом и разобраться в ней может даже новичок. А использование платы Arduino в качестве исполнительного устройства управления – сделало данную систему легко доступной в повторении и изготовлении.
ServoStudio 12 обладает интуитивно понятным интерфейсом и разобраться в ней может даже новичок. А использование платы Arduino в качестве исполнительного устройства управления – сделало данную систему легко доступной в повторении и изготовлении.
Немного предыстории. Вдохновившись идеей создания удобного тестера сервоприводов от Сергея Грищенко, я решил создать свою систему, которая была б проста в использовании и одновременно удобна и функциональна. В отличии от вышеуказанного тестера сервоприводов, за все управление отвечает программное обеспечение ServoStudio 12, на персональном компьютере, и плата Arduino поддерживает работу до 12 сервоприводов одновременно. Аппаратная часть же являет собой широко распространённую плату Arduino Nano либо Arduino Uno. Так же данное ПО додерживает работу с вышеуказанным тестером сервоприводов.
Изначально планировал создать небольшую программу, в которой бы по очереди воспроизводилась последовательность значений управляющего сигнала сервоприводов, но по ходу разработки у меня появлялись новые идеи, и простая программа переросла в полноценный блок управления механикой робота, с возможностью установки скорости перемещений и воспроизведением движений при помощи горячих клавиш.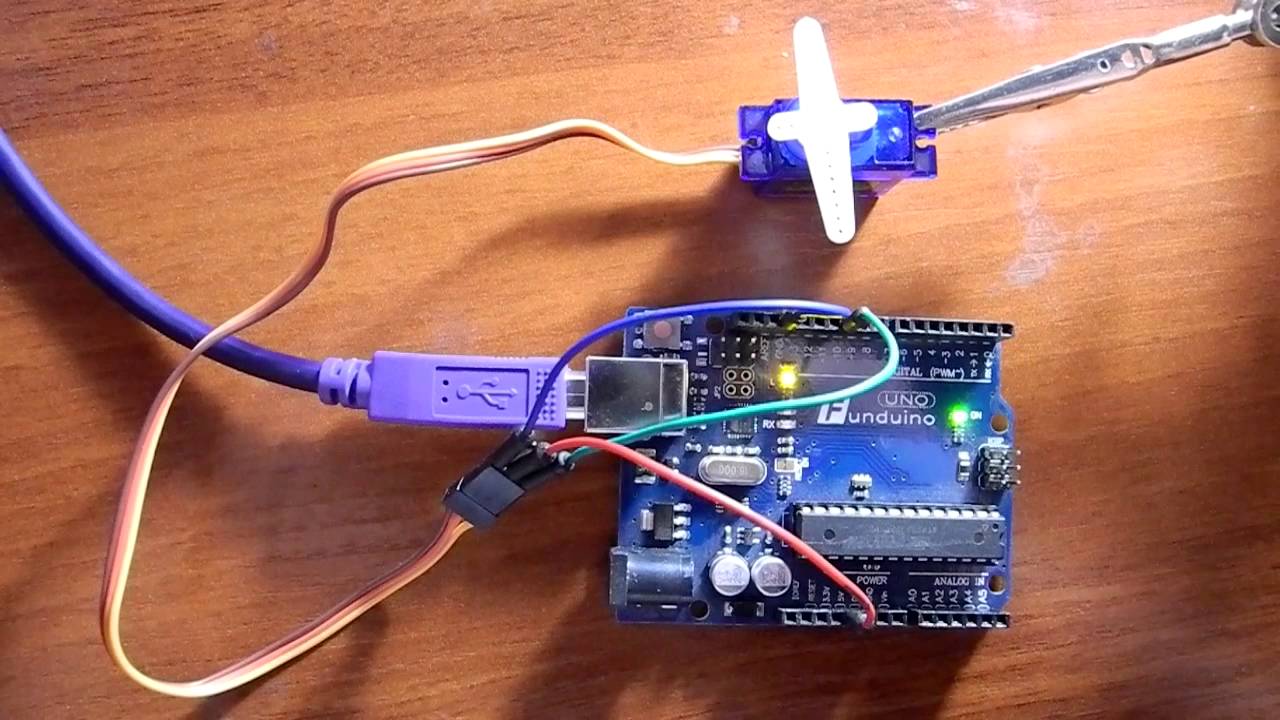
Сервопривод – в отличии от коллекторного мотора, позволяет делать поворот на определенный угол. Угол поворота задается шириной импульсов управляющего сигнала. Ширина этих импульсов может меняться в пределах 800 – 2300 мкс.
Для начала работы нам потребуется следующее:
- Плата Arduino Nano/Uno.
- Arduino IDE, чтоб запрограммировать данную плату.
- И ПО ServoStudio 12.
Схема подключения очень проста. Выводы D2-D13 подключаются к управляющим входам сервоприводов. Питание подключается к выводам питания Arduino. При большом потреблении тока сервоприводами- необходимо подключить внешний источник питания.
Первым делом в меню программы ServoStudio 12 необходимо выбрать пункт «Генератор кода» и подпункт «Создать скетч ServoStudio HardWare», сохранить данный скетч на диск и открыть в Arduino IDE и залить в Arduino Nano/Uno. Все, аппаратная часть готова! Данное действие производится всего один раз, с новой платой Arduino.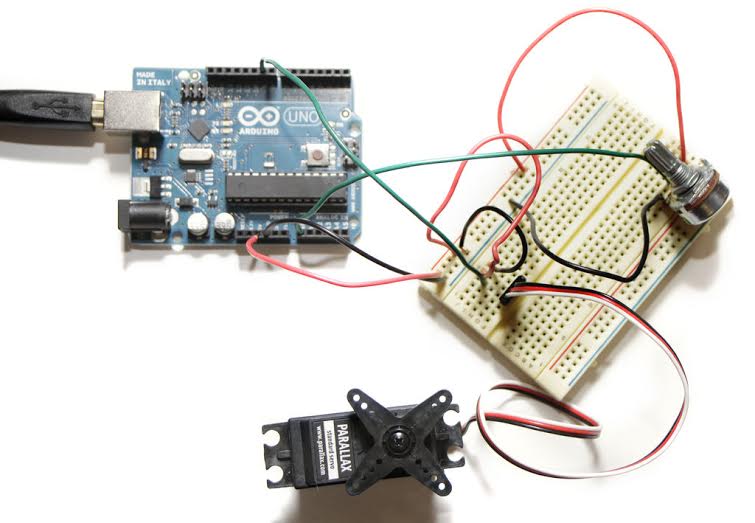
Для начала работы необходимо создать новый проект (меню Файл / Новый). В диалоговом окне выбрать необходимое количество ШИМ каналов (количество сервоприводов), выбрать тип платы тестера и написать имя своего устройства (для удобства).
Теперь об интерфейсе программы.
В нижней части расположены инструменты для создания последовательности ключевых точек. Перемещая ползунки регуляторов для соответствующих каналов задается значение ширины импульсов управляющего сигнала (угол поворота сервопривода) на соответствующем канале. Если установить флажок «управлять в реальном времени»- то при перемещении ползунка регулятора будет двигаться сервопривод, подключённый к данному каналу, что очень удобно, так как сразу наглядно видно положение привода в данной точке. После того как установили управляющий сигнал на всех необходимых каналах, нужно создать следующий «кадр» (следующую ключевую точку), при помощи кнопки «Добавить». И таким же образом, при помощи регуляторов, создать новую ключевую точку, и так сколько необходимо. Время, за которое сервоприводы должны повернуться на данный угол, выставляется для каждого кадра отдельно, в поле «время шага», время задается в миллисекундах. Чем больше данное значение– тем медленнее будет перемещение, чем меньше– тем быстрее. В поле «шаг» отображается текущий кадр последовательности. При необходимости, изменяя номер шага в данном поле, можно отредактировать предыдущие шаги. Для удобства, имена каналов можно менять, кликнув 2 раза на названии канала, слева от регулятора.
Время, за которое сервоприводы должны повернуться на данный угол, выставляется для каждого кадра отдельно, в поле «время шага», время задается в миллисекундах. Чем больше данное значение– тем медленнее будет перемещение, чем меньше– тем быстрее. В поле «шаг» отображается текущий кадр последовательности. При необходимости, изменяя номер шага в данном поле, можно отредактировать предыдущие шаги. Для удобства, имена каналов можно менять, кликнув 2 раза на названии канала, слева от регулятора.
В Верхней части, на графике, визуально отображается изменение ширины управляющего сигнала сервоприводов.
И когда создано какое-то законченное движение (например, шаг вперед), можно сохранить текущую последовательность как отдельную законченную последовательность, нажав кнопку «добавить» на панели «Последовательности», в правой части окна программы. Можно на пример создать несколько последовательностей, для движения вперед, назад, влево, вправо, итд. И эти последовательности можно воспроизводить независимо друг от друга, по двойному щелчку мыши, или из контекстного меню, а также из окна «пульт управления» (но об этом позже). Таким образом, воспроизводя эти последовательности, осуществляется управление устройством (роботом). Так же можно добавлять сохраненные последовательности в основную последовательность, создавая одну большую последовательность действий. Это может быть очень полезно для демонстрации работы устройства.
Таким образом, воспроизводя эти последовательности, осуществляется управление устройством (роботом). Так же можно добавлять сохраненные последовательности в основную последовательность, создавая одну большую последовательность действий. Это может быть очень полезно для демонстрации работы устройства.
Так же основную последовательность (которая в данный момент открыта в редакторе), можно экспортировать как скетч для Arduino IDE, для автономного воспроизведения платой Arduino, без участия ПК. Для этого в меню «Генератор кода» необходимо выбрать пункт «Экспорт последовательности» и в диалоговом окне нажать кнопку «Генерировать», после чего данный скетч можно скопировать в буфер обмена, либо сохранить как скетч для Arduino IDE. Дальше этот скетч можно залить обычным образом в контроллер платы Arduino.
Есть возможность воспроизводить данную последовательность циклично либо только один раз, установкой или снятием флажка «повторять циклично». Так же есть возможность экспорта в массив ключевых точек, это может быть полезно, если у вас уже есть своя программа для микроконтроллера и Вам необходимо в ней задать движения, при чем опционально можно добавлять в массив значения времени установки позиции, при помощи установки соответствующего флажка. Если, после прошивки данным скетчем, плату Arduino нужно опять использовать с программой ServoStudio 12 то необходимо опять в меню выбрать пункт «Генератор кода» и подпункт «Создать скетч ServoStudio HardWare», сохранить данный скетч на диск и открыть в Arduino IDE и залить в Arduino Nano/Uno.
Если, после прошивки данным скетчем, плату Arduino нужно опять использовать с программой ServoStudio 12 то необходимо опять в меню выбрать пункт «Генератор кода» и подпункт «Создать скетч ServoStudio HardWare», сохранить данный скетч на диск и открыть в Arduino IDE и залить в Arduino Nano/Uno.
Окно «пульт управления»
Позволяет использовать горячие клавиши для воспроизведения отдельных последовательностей. Для начала нужно нажать кнопку «Назначить клавиши», выбрать из выпадающего списка необходимую последовательность и назначить ей горячую клавишу. Когда все установлено- необходимо нажать кнопку «Запомнить». Теперь, пока открыто это окно, при нажатии на горячую клавишу будет воспроизводится назначенная ей последовательность.
Не маловажным есть пункт меню «Исходная позиция» — это положение сервоприводов при включении, либо просто «нормальное положение» для угла поворота сервоприводов. Другими словами, если не хотите, чтоб вашего робота перекосило при включении нужно регуляторами выбрать для него оптимальное положение и выбрать пункт меню «Записать текущий кадр в EEPROM Arduino как исходную позицию», данная функция доступна только для плат Arduino. Так же есть пункты «Записать текущий кадр как исходную позицию» и «Вставить исходную позицию в текущий кадр», это будет очень полезно, если нужно начать новую последовательность и исходной точки. Исходная позиция сохраняется в файле проекта и доступна при открытии файла, так что её не нужно будет заново подбирать.
Так же есть пункты «Записать текущий кадр как исходную позицию» и «Вставить исходную позицию в текущий кадр», это будет очень полезно, если нужно начать новую последовательность и исходной точки. Исходная позиция сохраняется в файле проекта и доступна при открытии файла, так что её не нужно будет заново подбирать.
В программе есть так же возможность ассоциировать файлы проекта с ServoStudio 12. Для этого ее нужно 1 раз запустить с правами администратора. ServoStudio 12 – полностью Portable, состоит из 1 файла (при закрытии программы еще создается файл последнего открытого проекта) и не требует установки.
Более подробно о работе можно посмотреть в видео.
Ссылка на скачивание ПО ServoStudio 12
Немного о планах на будущее:
- Хочу создать приложение для Android, которое могла б открывать файл проекта и можно б было использовать телефон для управления роботом.
 Управление осуществлять по BlueTooth или WiFi через TCP-UART переходник.
Управление осуществлять по BlueTooth или WiFi через TCP-UART переходник. - Так же хочу создать версию на большее количество каналов, для управления более сложными устройствами.
- Добавить обработку сигналов с подключённых датчиков (на пример если впереди препятствие- обойти его).
- Добавить возможность управления цифровыми выходами (на пример для включения светодиодов или чего-то другого)
Но останутся ли эти планы только планами либо выйдут в следующем релизе программы – на прямую зависит от интереса к данному комплексу.
Сервопривод– Ссылка Arduino
Позволяет платам Arduino управлять различными серводвигателями.
Эта библиотека может управлять большим количеством сервоприводов.
Он осторожно использует таймеры: библиотека может управлять 12 сервоприводами, используя только 1 таймер.
На Arduino Due вы можете контролировать до 60 сервоприводов.
Эта библиотека совместима с avr, megaavr, sam, samd, nrf52, stm32f4, mbed, mbed_nano, mbed_portenta, mbed_rp2040 архитектуры так что вы должен иметь возможность использовать его на следующие платы Arduino:
Чтобы использовать эту библиотеку, откройте Диспетчер библиотек в
в
Arduino IDE и установите ее оттуда.
Использование
Эта библиотека позволяет плате Arduino управлять серводвигателями RC (хобби). Сервоприводы имеют встроенные шестерни и вал, которым можно точно управлять. Стандартные сервоприводы позволяют расположить вал под разными углами, обычно от 0 до 180 градусов. Сервоприводы непрерывного вращения позволяют устанавливать различные скорости вращения вала.
Библиотека Servo поддерживает до 12 двигателей на большинстве плат Arduino и 48 на Arduino Mega. На платах, отличных от Mega, использование библиотеки отключает функцию analogWrite () (PWM) на контактах 9 и 10, независимо от того, есть ли на этих контактах сервопривод.На Mega можно использовать до 12 сервоприводов, не мешая функциональности ШИМ; использование двигателей от 12 до 23 отключит ШИМ на контактах 11 и 12.
Для использования этой библиотеки:
Схема
Серводвигатели имеют три провода: питание, заземление и сигнал. Провод питания обычно красного цвета и должен быть подключен к выводу 5V на плате Arduino. Заземляющий провод обычно бывает черного или коричневого цвета и должен быть подключен к контакту заземления на плате Arduino. Сигнальный контакт обычно желтого, оранжевого или белого цвета и должен быть подключен к цифровому контакту на плате Arduino.Обратите внимание, что сервоприводы потребляют значительную мощность, поэтому, если вам нужно управлять более чем одним или двумя, вам, вероятно, потребуется запитать их от отдельного источника (то есть не от вывода 5 В на вашем Arduino). Обязательно соедините заземление Arduino и внешнего источника питания вместе.
Заземляющий провод обычно бывает черного или коричневого цвета и должен быть подключен к контакту заземления на плате Arduino. Сигнальный контакт обычно желтого, оранжевого или белого цвета и должен быть подключен к цифровому контакту на плате Arduino.Обратите внимание, что сервоприводы потребляют значительную мощность, поэтому, если вам нужно управлять более чем одним или двумя, вам, вероятно, потребуется запитать их от отдельного источника (то есть не от вывода 5 В на вашем Arduino). Обязательно соедините заземление Arduino и внешнего источника питания вместе.
Примеры
- Ручка: управление валом серводвигателя поворотом потенциометра
- Sweep: перемещает вал серводвигателя вперед и назад
Smart Servo Shield для Arduino (совместим с сервоприводами Dynamixel AX / MX)
Smart Servo Shield для Arduino (совместим с сервоприводами Dynamixel AX / MX): обменивайтесь данными с любым необходимым количеством сервоприводов!
Создайте гирляндное соединение между вашим Arduino и сервоприводами Dynamixel AX и MX с помощью DFRobot Arduino Smart Servo Shield.Идея довольно проста: экран содержит полудуплексную схему, которая позволяет передавать каждую операцию, передаваемую по вашему кабелю UART, на все ваши серводвигатели. Но поскольку сообщение содержит идентификатор конкретного сервопривода, только этот сервопривод будет выполнять запрошенную операцию.
Еще лучше, поскольку сервоприводы могут быть подключены через последовательную шину, все они могут передавать данные о своем положении, скорости, крутящем моменте, токе и температуре двигателя, как если бы ваши сервоприводы были мотор-редукторами.
И если вы предпочитаете роботов, установленных на гусеницах, а не на колесах, нет проблем, Arduino Smart Servo Shield тоже может это сделать!
Используется для Servo Shield для Arduino (совместим с сервоприводами Dynamixel AX / MX)
С помощью этого вида аксессуаров вы позволите своему Arduino управлять многочисленными и мощными сервоприводами (до 200 сервоприводов или даже больше!) Быстро и легко. Dynamixel Servo Shield совместим с сервоприводами Dynamixel AX (такими как AX-12 и CDS55xx) и сервоприводами Dynamixel MX.
Вы можете использовать этот щит не только для ваших собственных творений (роботизированная собака, гексапод, четвероногий робот, робот-гуманоид, роботизированная рука и т. Д.), Но также для демонстрации ваших учеников, поскольку Smart Servo Shield для Arduino позволяет вам получать точные данные о движении и положении всех ваших серводвигателей.
Технические характеристики Smart Servo Shield для Arduino (совместимого с сервоприводами Dynamixel AX / MX)
- Процессор: ATmega8
- Поставка: 6 шт.5–12 В
- Совместимость с Arduino R3
- Интерфейс SPI с Arduino (цифровой 10, 11, 12, 13)
- Удобство для основного пользователя
- Интерфейс UART для более глубокого развития
- 7 каналов подключения сервоприводов
- Интегрированная полудуплексная схема
- Поверхность доски: иммерсионное золото
- Размеры: 59 x 53 мм
Ресурсы для Smart Servo Shield для Arduino (совместимые с сервоприводами Dynamixel AX / MX)
Мы собрали следующие ссылки, чтобы помочь вам расширить свои знания о DRI0027 Shield.
СхемаSmart Servo Shield для Arduino
ServoCds55 V2 программный код
Сервоконтроллеры роботов
Простое управление роботом с сервоконтроллерами Robotio USB
ROBOTIO NANO USB СЕРВО-КОНТРОЛЛЕРЫ ДЛЯ РОБОТОТЕХНИКИ
Простое управление сервоприводом, датчиком и общим вводом-выводом для ваших робототехнических, мехатронных или аниматронных проектов. Управляйте своим роботом через Micro USB, Serial UART Tx, Rx Pins или с помощью дополнительного модуля Bluetooth BluBerry.Программирование, совместимое с Arduino, для гибкого пользовательского кодирования или использование онлайн-приложения SERVO-MATIC для генерации кода для управления от 1 до 12 серводвигателей. Устанавливается непосредственно на комплекты манипуляторов Arm.Uno для аккуратного подключения кабелей через стандартные 3-контактные разъемы (заземление, питание, сигнал). Также отлично подходит для любого проекта или комплекта, использующего стандартные серводвигатели RC-типа, а также для общих экспериментов и проектов Arduino. Купите доску для мозга ROBOTIO NANO на Amazon
.Доступны два уникальных варианта:
Robotio Red – версия повышенной мощности для больших сервоприводов.Требуется отдельный источник питания сервопривода для соответствия нагрузке двигателя и напряжению.
Robotio Blue – бортовой источник питания двигателя 5 В при 2 А упрощает настройку и позволяет использовать удобные литий-ионные батареи 7,4 В.
Управляющее программное обеспечение:
Используйте любое устройство или программное обеспечение, способное отправлять простые текстовые команды (пример: «78,99,110,58x») на порт USB Robotio или его контакты UART. MeCon для Windows в настоящее время является самым популярным управляющим программным обеспечением.
НОВИНКА! Веб-приложение Servo Commander Online Роботизированное сервоуправление с помощью Bowser, Mac OS и Windows!
пакетов командной строки:
Платы сервоконтроллераRobotio USB используют протокол простой текстовой строки для отправки информации о положении серводвигателя в виде серии целых чисел, разделенных запятой и оканчивающихся строчной буквой «x».Целые числа представляют положение сервопривода в градусах и должны находиться в диапазоне 1–180.
Каждое целое число в строке представляет значение положения для 1 серводвигателя. Таким образом, командная строка «55,88,112,67x» будет позиционировать 4 серводвигателя, «45,145x» будет позиционировать 2 серводвигателя, подключенных к жестко запрограммированным номерам контактов в вашем коде эскиза Robotio или Arduino.
Протестированные коммуникационные устройства и программное обеспечение включают:
ЖК-модули Nextion HMI, программное обеспечение MeCon для Windows, веб-приложение Robotio Commander (для браузеров Mac OS и Windows OS), Lazarus Pascal в системах Windows и Raspberry Pi, Python в системе Windows, обработка в Mac OS, системах Windows и Raspberry Pi, Delphi в системах Windows, B4J Java в системе Windows и MIT Android App Inventor в сочетании с модулем Bluetooth в системах Android.
Примеры и руководства по использованию вышеуказанного программного обеспечения и устройств будут доступны, если позволит время.
Проверьте страницу «Программное обеспечение», чтобы узнать, что доступно в настоящее время. Если у вас есть интерес к любому из вышеперечисленного или предложение по другому языку программного обеспечения или программе, которая, по вашему мнению, будет подходящей, пожалуйста, свяжитесь со мной через «Электронное письмо о помощи по комплекту», которое прилагается к вашей покупке комплекта, и я расставлю приоритеты над работой над этот учебник или предложение, если я согласен, что он подходит.
USB Ch440 Com Port Драйверы:
На самых последних компьютерах уже установлены необходимые драйверы. Если ваш компьютер не распознает плату контроллера USB Robotio при подключении с помощью кабеля micro USB, вам, вероятно, потребуется установить правильный драйвер устройства. следующие ссылки загрузят правильный драйвер для вашего компьютера.
Драйвер для Windows 32 и 64 – Драйвер для Mac OS – Драйвер для Linux
RCArduino: проблемы сервопривода с Arduino
Проблемы сервопривода – одна из наиболее часто обсуждаемых тем в сообществе Arduino.Хотя проблемы могут возникать из-за программирования, проектирования схем и неисправного оборудования, подавляющее большинство проблем являются результатом недостаточной мощности или неправильно подключенного питания.
Управление без мощности – ничто!
Сама Arduino очень хороша в управлении сервоприводами, библиотека сервоприводов позволит одному Arduino управлять до 12 сервоприводами без дополнительного оборудования.
http://rcarduino.blogspot.com/2012/01/can-i-control-more-than-x-servos-with.html
Arduino не может подавать питание на 12 сервоприводов. Arduino может надежно подавать питание даже на один сервопривод.
Мощность – не все сервоприводы созданы равными
Создавая схему для картинок в этом посте, я решил
Измерьте ток, потребляемый каждым из тестовых сервоприводов без приложенной нагрузки.
Каждый из сервоприводов имеет стандартный размер, используемый в радиоуправляемых автомобилях.
все они – сервоприводы низкого уровня, доступные по цене от 10 до 15 долларов.
Ток холостого хода тестовых сервоприводов, мА
Bluebird потребляет в пять раз больше тока без нагрузки, чем Futaba, он также менее плавный и самый дешевый из протестированных сервоприводов.
Ток без нагрузки имеет значение только в небольшом количестве приложений, все сервоприводы потребляли больше, чем максимальное значение 250 мА, которое я смог измерить, когда подвергался легкой нагрузке в виде давления пальцем.
Мне будет интересно продолжить этот тест в будущем посте с использованием различных повторяемых нагрузок для сравнения производительности сервоприводов и потребляемого тока. Тот факт, что самый дешевый сервопривод потребляет в пять раз больше тока, чем сервопривод Futaba, предполагает, что это будет серьезной проблемой для более крупных автономных проектов, которые должны будут работать как на собственном питании, так и под нагрузкой.
Обратите внимание, что при управлении всеми четырьмя сервоприводами Arduino потребляла только 10 мА от отдельного источника питания.
Итак, как можно успешно управлять множеством сервоприводов с помощью Arduino?
Проблема с питанием легко решается добавлением «силовой цепи». Это может быть всего лишь четыре одноразовых батарейки типа АА, например, которые вы можете использовать в фотоаппарате или игрушечной машине.
4 бытовые батарейки AA в держателе
Перезаряжаемые AA – еще лучший вариант, они хранят столько же заряда, выдают столько же тока и могут использоваться снова и снова.
Для крупных проектов, которым необходимо работать на собственном источнике энергии, основная концепция остается той же, однако выбор технологии аккумуляторов будет другим. См. Раздел «Производительная мощность» в Части 2.
Так зачем нам две цепи питания?
Arduino имеет узкое рабочее напряжение около 5 В (в некоторых случаях 3,3 В) и чувствительно к изменениям этого напряжения. Дизайн Arduino основан на предположении, что стабильный источник питания 5 В будет питать чип, лежащий в основе Arduino.В случае популярного UNO эта регулируемая мощность 5 В подается через USB-соединение или через регулятор, встроенный в плату.
Встроенный регулятор предназначен для подачи питания на Arduino и вспомогательные схемы. Он не предназначен для питания внешних устройств, и попытки сделать это – единственная наиболее частая причина неудач с сервоприводами. «Не предназначен для питания внешних устройств» также относится к проектам, подключенным через USB.
В оставшейся части этого поста рассматривается настройка примера сервопривода Arduino, который будет управлять четырьмя сервоприводами от Arduino с использованием отдельного блока питания для удовлетворения требований к питанию сервоприводов.
Прохождение сервопривода Arduino –
1) Включите Arduino
Для пошагового руководства я использую Arduino UNO с питанием от 9-вольтовой батареи PP3.В Arduino загружен мой пример скетча Multi Sweep, ссылка приведена в конце.
Во время работы сервоприводов Arduino потреблял только 10 мА. Хороший PP3 может питать Arduino в течение нескольких дней, в конце концов, они питают дымовые извещатели в течение нескольких месяцев.
См. Примечание ниже, чтобы узнать больше о PP3 и о том, почему его батарея не подходит для использования в других местах в ваших проектах.
Примечание – PP3 – плохой выбор батареи для большинства приложений, он имеет небольшую емкость заряда (время работы) и не может обеспечивать более высокие токи, необходимые для привода сервоприводов или двигателей, однако обеспечиваемые им 9 вольт отлично подходят для питания Arduino. через бортовой регулятор. Поскольку Arduino так мало требует батареи, PP3 является обычным и практичным выбором для питания Arduino – только без экранов, двигателей, сервоприводов, передатчиков и т. Д. Это неподходящий выбор для обеспечения цепи питания в наших проектах, обычная батарея AA – гораздо лучшая альтернатива.В случае сервоприводов напряжение 9 В, подаваемое нерегулируемым PP3, превышает рекомендуемый рабочий диапазон от 4,8 до 6 В и приведет к немедленному повреждению сервопривода. Опять же, батареи AA – лучший выбор, так как четыре из них обеспечат полезные 6 Вольт для нашей цепи сервопривода и лучшее время работы.
У меня это не сработает, мне нужен USB для последовательного вывода –
Это совсем не проблема, вы можете просто подключить USB-кабель к Arduino, как обычно.Это обеспечит питание Arduino, поэтому вам не нужно использовать батарею 9V PP3.
Вы все равно должны использовать отдельное питание сервопривода, и это будет работать при условии, что заземление от аккумуляторной батареи подключено к Arduino.
2) Питание сервоприводов В качестве сервопривода я использую четыре одноразовых батарейки AA. Это версии с большой емкостью, которые продаются для камер, которые обеспечивают достаточный ток и заряд (время работы) для наших сервоприводов.
Каждая батарея AA содержит 1.5 вольт, всего 6 вольт (4 * 1,5).
Большинство сервоприводов рассчитаны на работу от 4,8 до 6 вольт. Подача большего напряжения может привести к немедленному повреждению. Четыре батарейки AA дают нам полезные 6 вольт.
Я подключил батарейки AA к шинам питания (красный) и заземления (черный) на своей макетной плате.
Обратите внимание на черную перемычку, идущую от макетной платы к Arduino?
Это следующая наиболее распространенная ошибка в проектах сервопривода, когда люди вводят серво блок питания, они забывают подключить общую землю.
Вы должны подключить заземляющий провод между цепью питания и Arduino (цепью управления), без этого подключения ваша цепь не будет работать. Это применимо независимо от того, питаете ли вы Arduino от розетки, USB-порта или аккумулятора.
На картинке вы можете видеть, где я просто соединил две цепи через черную перемычку, идущую от черной шины заземления макетной платы к контакту заземления (GND) на Arduino рядом с контактом 13.
Все из выводов заземления на Arduino соединены, поэтому используйте наиболее удобный вывод GND.
Эти две схемы теперь имеют общую землю, что позволяет нам добавить несколько сервоприводов.
2) Подключение отдельного сервопривода
Я добавил 3-контактную секцию заголовка печатной платы, чтобы упростить подключение гнездового разъема сервопривода к гнездовой макетной плате.Рядом с этим вы можете видеть, что я добавил зеленую перемычку от шины заземления аккумуляторной батареи к контакту 1 разъема, это общая земля между Arduino, аккумуляторной батареей и сервоприводом.
Затем я добавил желтую перемычку от шины питания – 6 В от батарейного блока AA – к центральному контакту разъема.Это обеспечит питание сервопривода напрямую от батарейного блока AA, а не от Arduino или его 9-вольтовой батареи PP3.
Последний вывод – это сигнальный вывод, это вывод, который Arduino будет использовать, чтобы сообщить сервоприводу, какое положение удерживать.
Помните – без точки соприкосновения между Arduino и батарейным блоком Servo AA ваш проект не будет работать. На рисунке это общее заземление обеспечивается черным проводом, соединяющим шину заземления макета с контактом GND рядом с контактом 13 Arduino.
3) Добавление сервопривода
Все, что нам нужно сделать сейчас, это подключить наш первый сервопривод –
Вы также можете видеть, что я добавил заголовки еще для трех сервоприводов, следуя тому же условию: желтый для питания 6 В от батарейного блока AA и зеленый для общего заземления блока батарей Arduino / AA.
Сервопривод получает свои сигналы положения от Arduino через белую перемычку, подключенную к контакту 13. Помните – без общего заземления (черный провод), соединяющего контакт Arduino GND с землей (-) для аккумуляторной батареи через черный заземляющая рейка макета, это не сработает!
Если вы загрузили скетч с примером нескольких разверток, ссылка на который приведена в конце этого поста, вы должны увидеть, как ваш сервопривод перемещается вперед и назад.
4) Добавление дополнительных сервоприводов
После того, как у вас есть один сервопривод, вы можете добавить еще, следуя тому же соглашению – подключите штекер сервопривода к заголовку так, чтобы конец с черным проводом был прикреплен к контакту заголовка с зеленым проводом.Затем вы можете добавить соединение от сигнального контакта к любому из цифровых контактов Arduino 2-13, и вы должны увидеть, что ваши дополнительные сервоприводы следуют той же схеме развертки, что и первый сервопривод –
Пример скетча Multi Sweep, использованный в этом видео, см. В сообщении – Могу ли я управлять более чем X сервоприводами с помощью Arduino?
Выводы –
Arduino может управлять большим количеством сервоприводов без дополнительного оборудования при условии, что для сервоприводов выделен отдельный источник питания.
Четыре одноразовые или перезаряжаемые батареи AA – хороший выбор для обеспечения такого питания в небольших проектах.
Для больших проектов потребуются аккумуляторные батареи или фиксированные источники питания. Во второй части будут рассмотрены некоторые из этих вариантов и требования к мощности тестовых сервоприводов при различных нагрузках.
Используемые модели сервоприводов и потребляемый ток без нагрузки –
Ток сервоприводов мА
| Futaba S3003 | 55 |
| HITEC HS-322HD | 75 |
| ACE S1903 | 90 |
| Синяя птица BMS410 | 250 |
Duane B
Lynxmotion – Интеллектуальный сервопривод Lynxmotion (LSS)
|
Модуль Lynxmotion (LSS) – 2IO, совместимая с Arduino Модуль («Lynxmotion Smart Servo To Input / Output») был разработан как универсальная плата, предназначенная для «преодоления разрыва» между последовательной шиной Lynxmotion Smart Servo (LSS). и обычные 3-контактные сервоприводы RC и датчики 5V.Поскольку LSS-2IO фактически является платой микроконтроллера, совместимой с Arduino, ее также можно перепрограммировать с помощью стандартного программного обеспечения Arduino IDE для связи с цифровыми, аналоговыми или I2C датчиками, действующими как стандартная плата Arduino. Его также можно использовать в качестве адаптера USB-to-Serial для прямого управления Lynxmotion Smart Servo через USB.
Технические характеристики
- Микроконтроллер: ATMega328P
- ИС USB-последовательный порт: Ch440E (загрузка драйвера)
- Логическое напряжение: 5 В
- Аналоговая шина напряжения: 5 В
- Максимальный ток логики 5 В: 200 мА
- Максимальный ток аналоговой шины 5 В: 1.2 А
- Количество аналоговых выводов: 3
- Количество цифровых контактов ввода-вывода: 3
- Входное напряжение через разъем LSS: 6 – 12 В
- Максимальный номинальный ток через разъемы LSS: 2 А
- Скорость передачи данных по умолчанию в режиме 2RC (с предварительно загруженной программой LSS-2IO Arduino): 115200
Что входит в комплект
- 1x модуль LSS-2IO
- 1x последовательный кабель LSS 150 мм
- 1x перемычка на 2 штуки.Штифты 54мм
- 3x 2-56 x 1/4 “- Винты с крестообразным шлицем – Черный
Вики
Lynxmotion Wiki – Главная страницаLynxmotion Wiki – Плата LSS 2IO
Сервоуправление кнопочным переключателем arduino
В этом проекте движение вала сервопривода по часовой стрелке и против часовой стрелки контролируется двумя кнопками с помощью Arduino; см .: Как использовать сервопривод с Arduino.
В схеме положительный источник питания с выхода + 5V подключен к одной клемме переключателя SPST.Другая сторона клемм подключена к цифровым контактам 2 и 3 платы Arduino с помощью понижающих резисторов 1 кОм (подключенных между входными контактами и клеммой GND). Таким образом, всякий раз, когда нажимаются переключатели, цифровые контакты получают активный вход высокого состояния.
Если первый переключатель нажат, контакт 2 будет находиться в активном высоком состоянии, тогда положение сервопривода начинает увеличиваться, пока переключатель удерживается в положении ON, пока не достигнет значения 180 градусов. Точно так же сервопривод сохраняет уменьшение до 0 градусов при нажатии второго переключателя.
Скорость сервопривода можно контролировать, регулируя функцию задержки времени; В функции delay () время задержки указывается в миллисекундах. Скорость вращения обратно пропорциональна значению выдержки времени.
Здесь сервопривод перемещается только тогда, когда на входе активный высокий уровень. Как только кнопка отпускается, движение руки останавливается в текущем положении. И при повторном нажатии переключателя движение продолжается с той же позиции. Если сервопривод либо увеличивает, либо уменьшает, нажатую в данный момент кнопку необходимо отпустить, чтобы прочитать состояние другого переключателя.
Код
#include < Servo .h>
int pos = 0;
Сервопривод Сервопривод ;
void setup () {
pinMode (2, ВХОД);
pinMode (3, ВХОД);
сервопривод (9);
}
void loop () {
while (digitalRead (2) == HIGH && pos <180) {
pos ++;
серво. запись (поз.);
задержка (15);
}
while (digitalRead (3) == HIGH && pos> 0) {
pos--;
сервопривод.написать (pos);
задержка (15);
}
}
Сервоуправление с Arduino – Arduino и программирование
Маниту,
Это поучительное обсуждение. Я благодарю тебя.
Я вижу, что вы упомянули, что в конце развертки часто наблюдается наибольшее дрожание, но в моем случае ваш график ТОЧНО отражает движение, которое совершает мой сервопривод LB по мере его прохождения через полный диапазон движения. Наибольшее дрожание происходит в направлении ЦЕНТРАЛЬНОЙ линии развертки, а наименьшее – в сторону хвостовых концов каждой развертки.Для приложения, которое нужно моей дочери, этот эндогенный джиттер может оказаться очень полезным. Так что я думаю, что мы можем жить с этим, даже если модификации не могут компенсировать это.
Тем не менее, между моментом этой моей новой публикации и моей предыдущей публикацией я просмотрел ссылку, которую вы мне прислали, а также прочитал сообщения на различных форумах Arduino и r / c в Интернете, и ваше сообщение является отличным краткое изложение многого, с чем я столкнулся. Большое спасибо за подробность, лаконичность и организованность темы.И, что более важно, ваш график действительно стоит тысячи слов.
Тем не менее, я не уверен, что полностью понимаю график. Пожалуйста, помоги мне. Вы назвали это:
«v = analogRead (A2) / 4; и распечатал i и v ».
Итак, что конкретно представляют собой оси графика?
x = ток с y = выходное напряжение?
Или, X – это угол развертки с y = выходным напряжением (которое колеблется вверх и вниз)?
Теперь для решений:
- Программа
: как вы указываете, я постараюсь повозиться с задержкой в вашем скетче.
- Аппаратное обеспечение
: я читал, что более дорогие сервоприводы обычно работают с меньшим джиттером, потому что их потенциометры более точны с большим разрешением, а также сделаны из более качественной подложки. Но для такого решения мне пришлось бы выйти за рамки оборудования LB и начать подключаться к дополнительным контактам на LB arduino. Кроме того, отображение 25–255 на развертке 145 градусов обеспечивает внутреннее ограничение разрешения (если мои расчеты верны) чуть больше половины градуса за шаг.
Я купил комплект разработчика оборудования LB, так что это может быть выход.
многие сайты предлагают открыть сервопривод и очистить потенциометр, предполагая, что горшок может иметь окисленные поверхности или мусор. Я не могу себе представить, что это вероятная проблема, поскольку они совершенно новые (хотя на заводах случались и более странные вещи). Кроме того, данные, которые вы ловко собрали, передавая d5 в a2 и analogRead (a2), полностью отражают то, что я субъективно вижу, и, следовательно, предполагают, что проблема заключается либо в LB Arduino, либо в источнике питания USB.
Я исключил источник питания USB как источник зашумленного тока (или это напряжение?), Заменив источник питания на батарею 9 В. Тем не менее, даже с батареей 9 В сервопривод дрожит в одинаковой степени во всем диапазоне движения.некоторые сайты предполагают, что:
a) размещение крошечного нанофарадного конденсатора (или даже резисторов) между «разными» (я использую «разные», чтобы указать на мое недоумение относительно того, проблема ли это с сигналом или проблема с питанием), это сгладит электрические помехи. происходящий из Arduino, который вы отобразили на своем графике i, v (что мне неловко сказать, что я не совсем понимаю).
b) размещение конденсатора большего уровня микрофарад будет дополнять любое начальное снижение тока, которое сервопривод может вызывать каждый раз, когда он начинает движение.
Все это вызывает вопрос, адресованный непосредственно Little Bits, Inc. Может ли Little Bits рассмотреть возможность создания комбинации сервопривода и Arduino, которая решает эту проблему из коробки, чтобы нам не приходилось это делать? Я довольно образованный человек, новичок в программировании и микроконтроллерах, но вполне способен учиться, имея за плечами пару курсов физики, математики и компьютера на уровне колледжа и профессиональную медицинскую степень (от 20 лет назад), и мне это довольно сложно.Для меня это весело, но я думаю, что это было бы королевским отказом для многих детей, у которых есть второстепенный интерес к полезности информатики. Я говорю, конечно, о моей очень умной дочери, которая больше заинтересована в применении LB Arduino для решения ее зарождающихся ветеринарных амбиций.
