
Регулятор оборотов электродвигателя постоянного тока 12В: схема своими руками
На простых механизмах удобно устанавливать аналоговые регуляторы тока. К примеру, они могут изменить скорость вращения вала мотора. С технической стороны выполнить такой регулятор просто (потребуется установка одного транзистора). Применим для регулировки независимой скорости моторов в робототехнике и источниках питания. Наиболее распространены два варианта регуляторов: одноканальные и двухканальные.
Видео №1. Одноканальный регулятор в работе. Меняет скорость кручения вала мотора посредством вращения ручки переменного резистора.
Видео №2. Увеличение скорости кручения вала мотора при работе одноканального регулятора. Рост числа оборотов от минимального до максимального значения при вращении ручки переменного резистора.
Видео №3. Двухканальный регулятор в работе. Независимая установка скорости кручения валов моторов на базе подстроечных резисторов.
Видео №4. Напряжение на выходе регулятора измерено цифровым мультиметром. Полученное значение равно напряжению батарейки, от которого отняли 0,6 вольт (разница возникает из-за падения напряжения на переходе транзистора). При использовании батарейки в 9,55 вольт, фиксируется изменение от 0 до 8,9 вольт.
Полученное значение равно напряжению батарейки, от которого отняли 0,6 вольт (разница возникает из-за падения напряжения на переходе транзистора). При использовании батарейки в 9,55 вольт, фиксируется изменение от 0 до 8,9 вольт.
Функции и основные характеристики
Ток нагрузки одноканального (фото. 1) и двухканального (фото. 2) регуляторов не превышает 1,5 А. Поэтому для повышения нагрузочной способности производят замену транзистора КТ815А на КТ972А. Нумерация выводов для этих транзисторов совпадает (э-к-б). Но модель КТ972А работоспособна с токами до 4А.
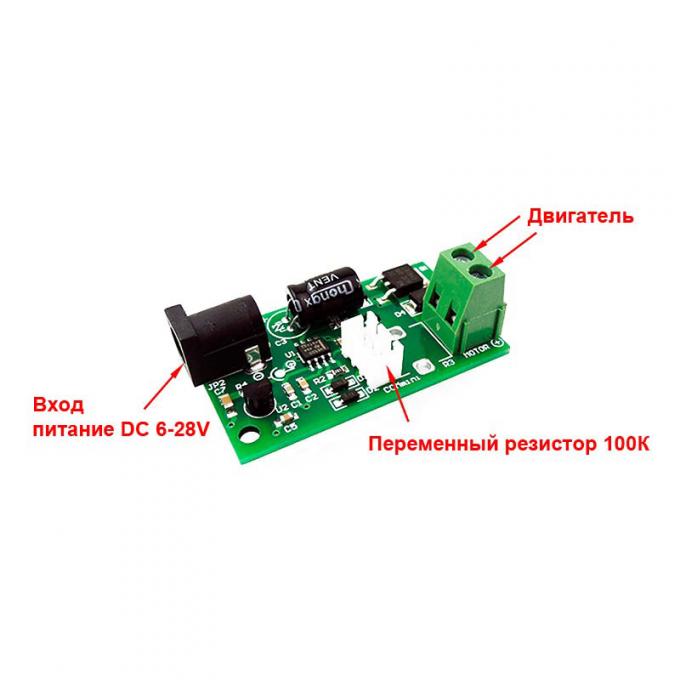
Одноканальный регулятор для мотора
Устройство управляет одним мотором, питание осуществляется от напряжения в диапазоне от 2 до 12 вольт.
Конструкция устройства
Основные элементы конструкции регулятора представлены на фото. 3. Устройство состоит из пяти компонентов: два резистор переменного сопротивления с сопротивлением 10 кОм (№1) и 1 кОм (№2), транзистор модели КТ815А (№3), пара двухсекционных винтовых клеммника на выход для подключения мотора (№4) и вход для подключения батарейки (№5).
Примечание 1. Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Принцип работы
Порядок работы регулятора мотора описывает электросхема (рис. 1). С учетом полярности на разъем ХТ1 подают постоянное напряжение. Лампочку или мотор подключают к разъему ХТ2. На входе включают переменный резистор R1, вращение его ручки изменяет потенциал на среднем выходе в противовес минусу батарейки. Через токоограничитель R2 произведено подключение среднего выхода к базовому выводу транзистора VT1. При этом транзистор включен по схеме регулярного тока. Положительный потенциал на базовом выходе увеличивается при перемещении вверх среднего вывода от плавного вращения ручки переменного резистора. Происходит увеличение тока, которое обусловлено снижением сопротивления перехода коллектор-эмитттер в транзисторе VT1. Потенциал будет уменьшаться, если ситуация будет обратной.
Материалы и детали
Необходима печатная плата размером 20х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита (допустимая толщина 1-1,5 мм). В таблице 1 приведен список радиокомпонентов.
Примечание 2. Необходимый для устройства переменный резистор может быть любого производства, важно соблюсти для него значения сопротивления тока указанные в таблице 1.
Примечание 3. Для регулировки токов выше 1,5А транзистор КТ815Г заменяют на более мощный КТ972А (с максимальным током 4А). При этом рисунок печатной платы менять не требуется, так как распределение выводов у обоих транзисторов идентично.
Процесс сборки
Для дальнейшей работы нужно скачать архивный файл, размещенный в конце статьи, разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора (файл termo1), а монтажный чертеж (файл montag1) – на белом листе офисной (формат А4).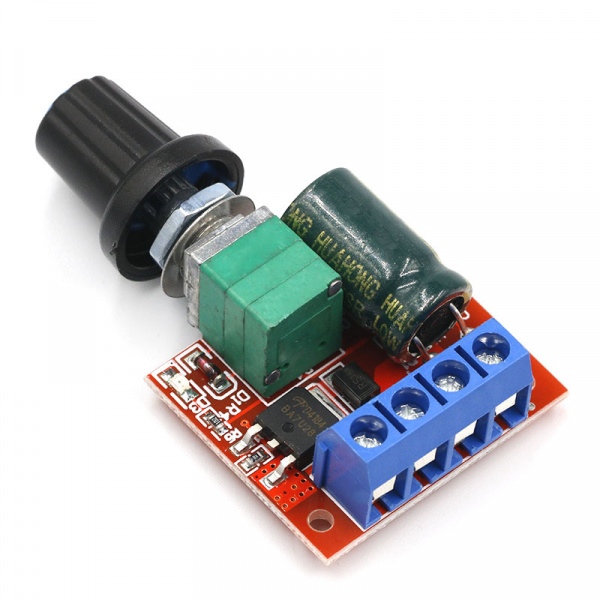
Далее чертеж монтажной платы (№1 на фото. 4) наклеивают к токоведущим дорожкам на противоположной стороне печатной платы (№2 на фото. 4). Необходимо сделать отверстия (№3 на фото. 14) на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпадать. На фото.5 показана цоколёвка транзистора КТ815.
Вход и выход клеммников-разъемов маркируют белым цветом . Через клипсу к клеммнику подключается источник напряжения. Полностью собранный одноканальный регулятор отображен на фото. Источник питания (батарея 9 вольт) подключается на финальном этапе сборки. Теперь можно регулировать скорость вращения вала с помощью мотора, для этого нужно плавно вращать ручку регулировки переменного резистора.
Для тестирования устройства необходимо из архива распечатать чертеж диска. Далее нужно наклеить этот чертеж (№1) на плотную и тонкую картонную бумагу (№2 ). Затем с помощью ножниц вырезается диск (№3).![]()
Полученную заготовку переворачивают (№1 ) и к центру крепят квадрат черной изоленты (№2) для лучшего сцепления поверхности вала мотора с диском. Нужно сделать отверстие (№3) как указано на изображении. Затем диск устанавливают на вал мотора и можно приступать к испытаниям. Одноканальный регулятор мотора готов!
Двухканальный регулятор для мотора
Используется для независимого управления парой моторов одновременно. Питание осуществляется от напряжения в диапазоне от 2 до 12 вольт. Ток нагрузки рассчитан до 1,5А на каждый канал.
Конструкция устройства
Основные компоненты конструкции представлены на фото.10 и включают: два подстроечных резистора для регулировки 2-го канала (№1) и 1-го канала (№2), три двухсекционных винтовых клеммника для выхода на 2-ой мотор (№3), для выхода на 1-ый мотор (№4) и для входа (№5).
Примечание.1 Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Принцип работы
Схема двухканального регулятора идентична электрической схеме одноканального регулятора. Состоит из двух частей (рис.2). Основное отличие: резистор переменного сопротивления замен на подстроечный резистор. Скорость вращения валов устанавливается заранее.
Примечание.2. Для оперативной регулировки скорости кручения моторов подстроечные резисторы заменяют с помощью монтажного провода с резисторами переменного сопротивления с показателями сопротивлений, указанными на схеме.
Материалы и детали
Понадобится печатная плата размером 30х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита толщиной 1-1,5 мм. В таблице 2 приведен список радиокомпонентов.
Процесс сборки
После скачивания архивного файла, размещенного в конце статьи, нужно разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора для термоперевода (файл termo2), а монтажный чертеж (файл montag2) – на белом листе офисной (формат А4).
Чертеж монтажной платы наклеивают к токоведущим дорожкам на противоположной стороне печатной платы . Формируют отверстия на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпасть. Производится цоколёвка транзистора КТ815. Для проверки нужно временно соединить монтажным проводом входы 1 и 2 .
Любой из входов подключают к полюсу источника питания (в примере показана батарейка 9 вольт). Минус источника питания при этом крепят к центру клеммника. Важно помнить: черный провод «-», а красный «+».
Моторы должны быть подключены к двум клеммникам, также необходимо установить нужную скорость. После успешных испытаний нужно удалить временное соединение входов и установить устройство на модель робота. Двухканальный регулятор мотора готов!
В АРХИВЕ представленные необходимые схемы и чертежи для работы. Эмиттеры транзисторов помечены красными стрелками.
Источник: servodroid.ru Дополнительная статья ЧИТАТЬ
Регулятор скорости двигателя постоянного тока
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.
Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.
Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
Существует много схем для генерации ШИМ сигнала. Одна из самых простых – это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
Напряжение питания схемы VCC может быть в диапазоне 5 – 16 Вольт. В качестве диодов VD1 – VD3 можно взять практически любые диоды.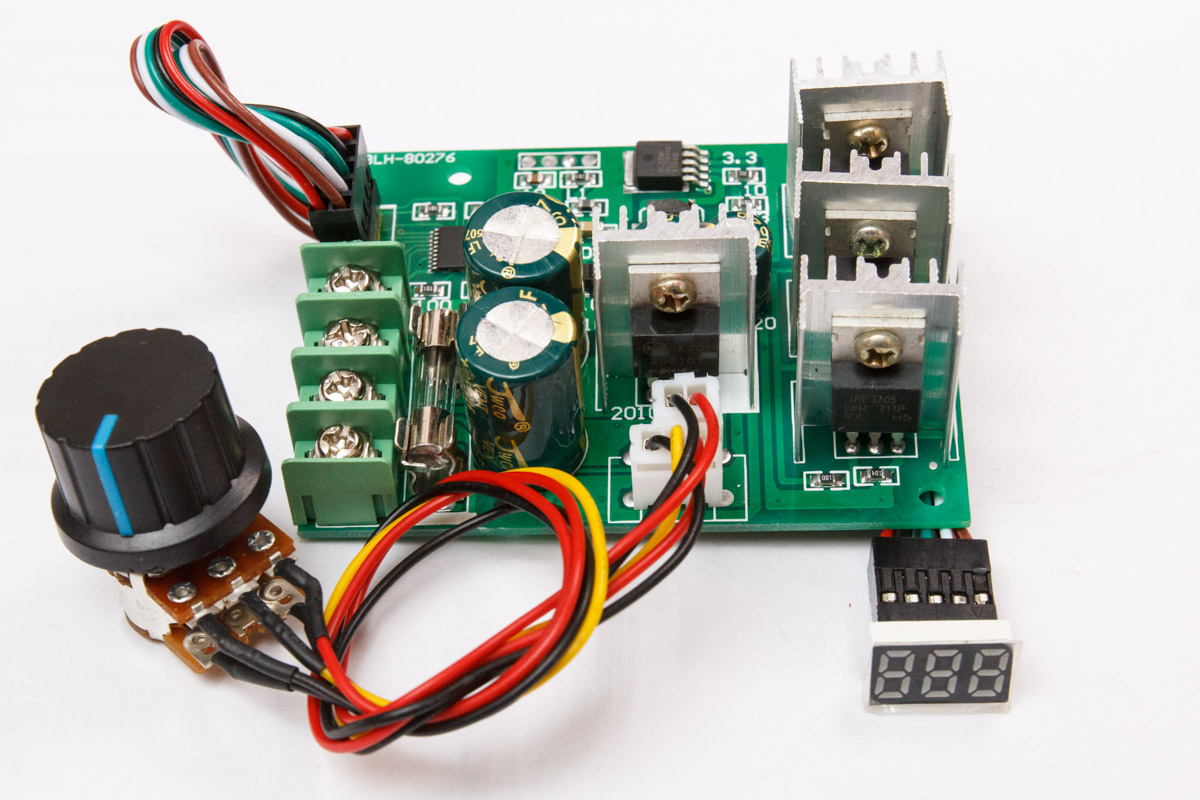
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.
Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень.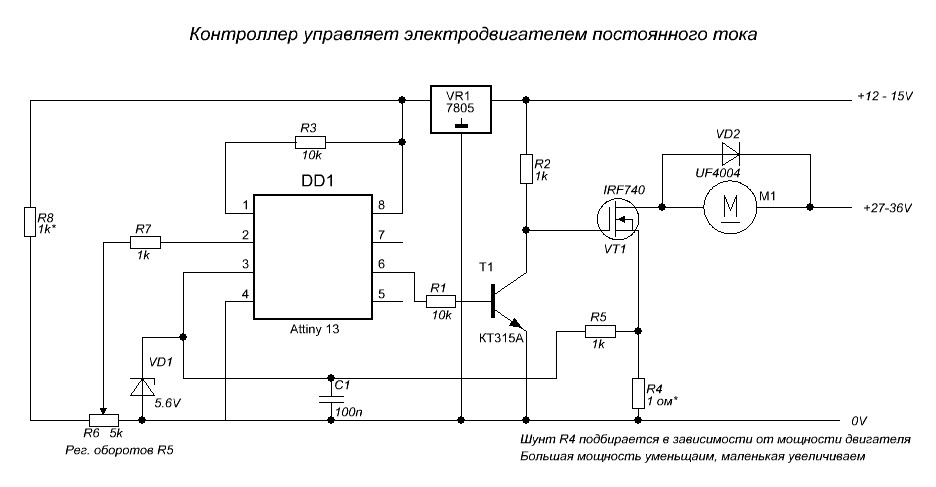 Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д.
VT1 – полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.
Регулятор оборотов электродвигателя от 10 до 50 вольт 40 ампер
Выберите категорию:
Все
Запчасти для газовых котлов
» Запчасти универсальные для котлов (взаимозаменяемые)
» Запчасти для напольных котлов
» Запчасти Navien
» Запчасти Daewoo (ДЕУ)
» Запчасти Master Gas Seul
» Запчасти Ferroli
»» Ferroli Arena
»» Ferroli Fortuna
»» Ferroli Domina/Pro
»» Ferroli Divatech
»» Ferroli DOMIPROJECT
»» Ferroli Divatop
» Запчасти Beretta
» Запчасти для Bosch, Junkers
» Запчасти Arderia
» Запчасти BAXI
» Запчасти Аристон
» Запчасти VIESSMANN
» Запчасти VAILLANT
» Запчасти Балтгаз (BaltGaz), Нева Люкс (NevaLux)
» Immergas
» Запчасти Chaffoteaux
» Запчасти для газовых горелок
» Запчасти Hermann
Запчасти для электрических котлов и водонагревателей
Запчасти для газовых колонок
Запчасти на газовые и электрические плиты
Отопительное оборудование
» Котлы газовые
»» Настенные газовые котлы
»»» Котлы газовые настенные Navien
»»»» Серия NAVIEN DELUXE
»»»» Серия NAVIEN DELUXE PLUS
»»»» Серия NAVIEN ATMO
»»» Котлы газовые настенные NEVA (Нева)
»»» Котлы газовые настенные Arderia
»»» Котлы газовые настенные Ferroli
»»» Котлы газовые настенные Daewoo
»»» Котлы газовые настенные Vaillant
»»» Котлы газовые настенные BAXI
»»»» Настенные
»»»» Настенные конденсационные
»»» Котлы газовые настенные OASIS
»»» Настенные газовые котлы Olical JLG (КНР)
»»» Котлы газовые Vissmann
»» Напольные газовые котлы
»»» Котлы напольные одноконтурные
»»» Котлы напольные двухконтурные
»»» Аппараты АОГВ
»» Парапетные котлы
»» Дымоходы, комплектующие дымоход для газовых котлов
» Газовые конвекторы
» Котлы электрические
» Котлы на отработке
» Котлы напольные твердотопливные
»» Котлы пиролизные
»» Твердотопливные котлы
»»» Твердотопливные стальные котлы
»»» Твердотопливные чугунные котлы
»»» Газогорелочные устройства – горелки
»»» Пеллетные горелки
»» Котлы пилетные
» Обогреватели на жидком топливе
» Расширительные баки для систем отопления
» Печи отопительные твёрдотопливные
» Группы безопасности
Товар со скидкой (Распродажа)
Бытовая сантехника
» Аксессуары для ванных комнат и туалетов
»» Аксессуары D-Lin
»» Аксессуары FRAP
» Мойки кухонные
» Полотенцесушители
» Смесители
»» Запасные части для смесителей
» Сифоны, комплектующие
» Комплектующие для спускных бачков
Водонагреватели
Газовые шланги, гибкая подводка для воды, шланги для полива
Дымоходы
» Одностенные Дымоходы
» Двухстенные дымоходы
Запорно-регулирующая арматура
» Газовые краны
» Вентили, латунные, чугунные.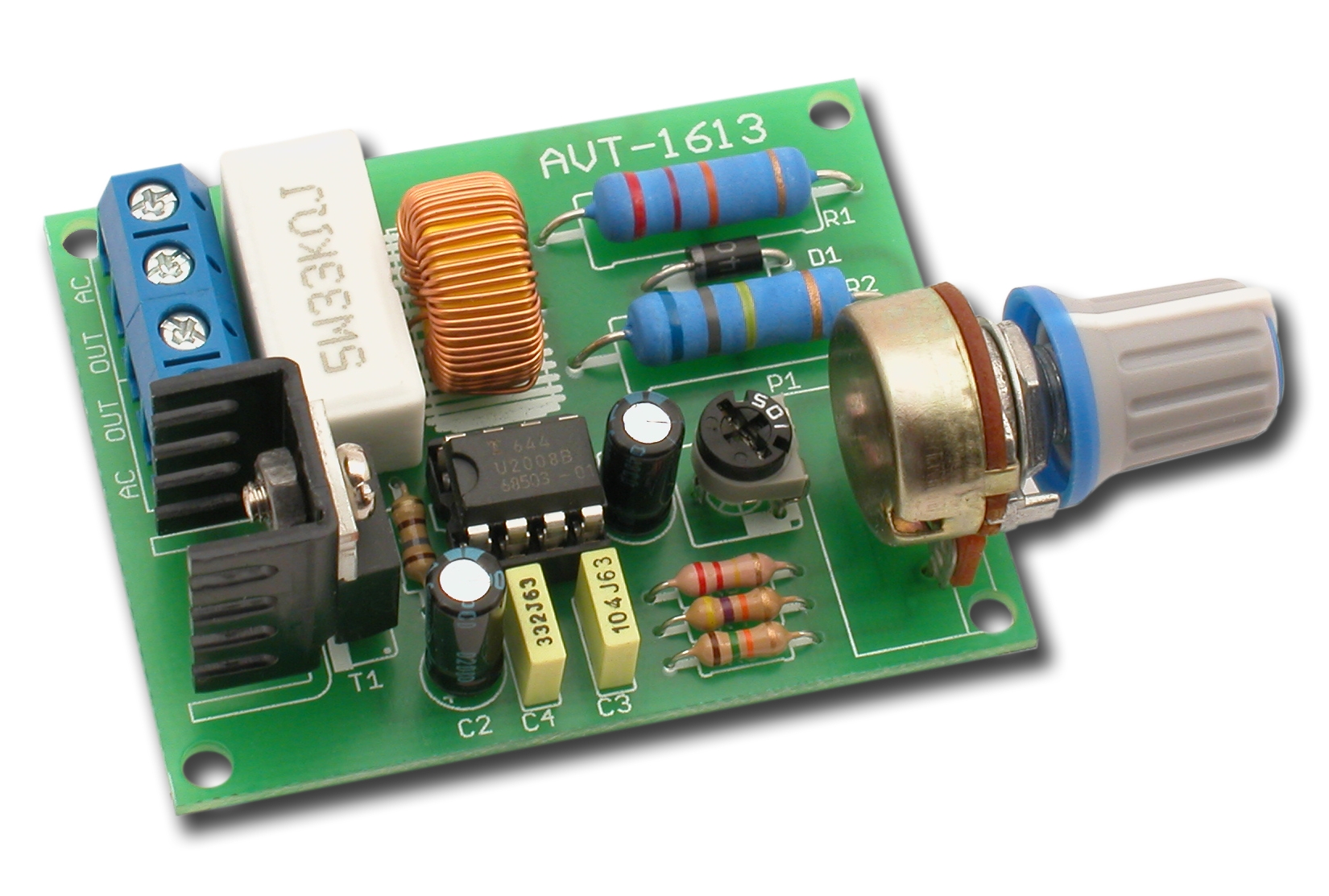
Производитель:
Все”WIKA Alexander Wiegand GmbH & Co. “, Германия.AEG (Китай)Altoen DaewooAXIS, РоссияBAXIBeretta, ИталияBONOMINI, ИталияBugatti, ИталияD-LIN (Китай)FerroliFimeFIV, ИталияFRAP (Китай)GrundfosGrundfos, ДанияHaierHONEYWELLHONEYWELLHoneywell, Csech RepublicIMITItaltehnica ИталияJet-line Varmega, ИталияMeerPlastMORA (Чехия)OpenTherm (starclima) италияOstendorf, ГерманияRBM, ИталияRiello, ИталияSIT GRUP EUSohonThermoWatt, ИталияTIM, КитайUnipump РоссияVaillantWatss ГерманияWilo ГерманияZilmetАнипласт, РоссияБалтГазВенгрияГерманияГреция HalcorЖМЗ, РоссияЗАВОД ТЕПЛОВОГО ОБОРУДОВАНИЯ “ПЕЛЛЕТРОН” Дамир тел. 8-912-292-23-59 +WhatsAppИталияКитайКореяЛуч (Таганрог)Мимакс Таганрог (8634) 38-16-13, 38-02-80 [email protected], Ип СупруновНева (Балтгаз)НидерландыОООПолитэк, РоссияПольшаРБМ, ТулаРоссияРоссия, г. ЭнгельсРоссия, г.ТаганрогРоссия, Московская областьРоссия, Челябинск.РязаньРязань ООО”РОСТ”Санкт-Петербург, РоссияСАНПОЛИМЕР РоссияСанполимер, РоссияТепловодомер, РоссияТурцияТурцияУклад, ПсковФинляндияФранцияЧистополь, РоссияШвеция SWEPЭван (Россия)Япония
Двунаправленный регулятор скорости двигателя постоянного тока.
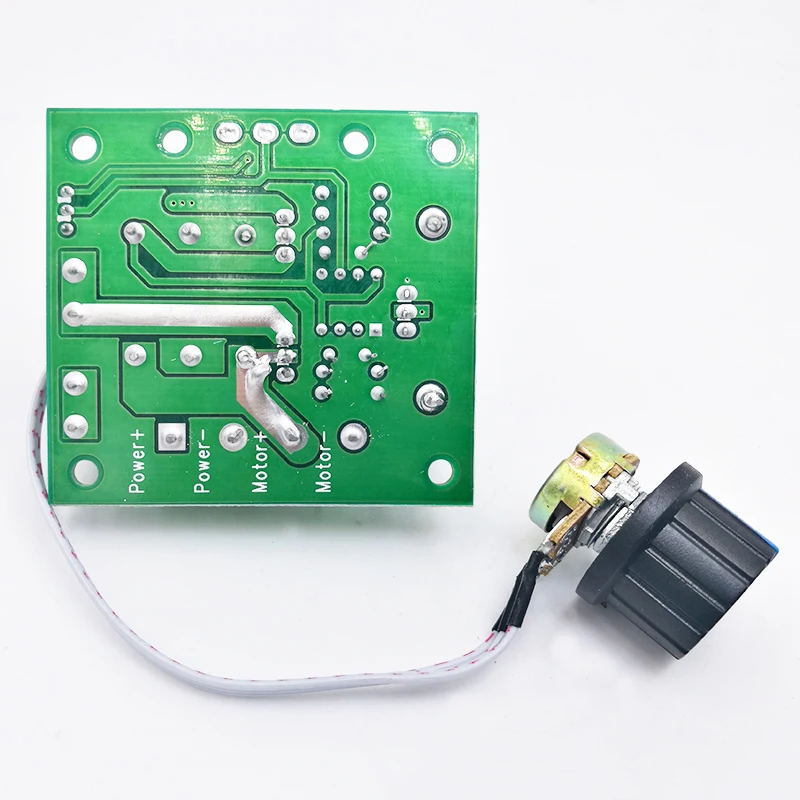 Схема и описание
Схема и описаниеИзменение скорости двигателя постоянного тока является фундаментальной задачей во многих устройствах, в которых используются двигатели.
В статье представлен несложный, а главное — «не микроконтроллерный» двунаправленный регулятор скорости вращения двигателя постоянного тока с использованием метода ШИМ.
Цифровой мультиметр AN8009
Большой ЖК-дисплей с подсветкой, 9999 отсчетов, измерение TrueRMS…
В этом устройстве для установки скорости двигателя используется потенциометр. В крайних положениях двигатель работает на максимальной скорости в заданном направлении. Двигатель останавливается и тормозит, когда потенциометр находится в среднем положении.
Изменение направления вращения выполняется автоматически в зависимости от положения потенциометра. В крайних положениях сигнал ШИМ имеет 100% заполнение, что обеспечивает минимальные потери при максимальной скорости. «Нулевое» положение имеет мертвую зону, что способствует стабильной остановке двигателя.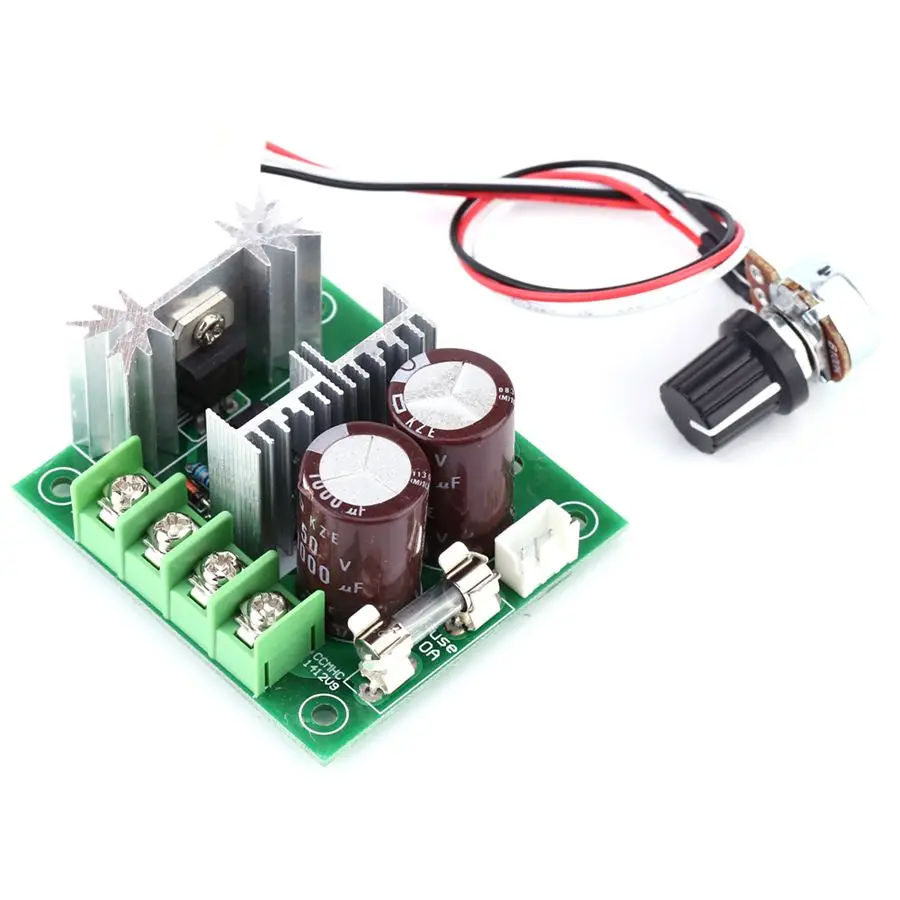
На контроллер можно подавать напряжение в диапазоне 8 … 30 В постоянного тока, что обеспечивает совместимость с типичными двигателями постоянного тока. Максимальная допустимая нагрузка по току составляет 2 А.
Принципиальная схема регулятора скорости вращения двигателя показана на рисунке ниже.
Регулятор состоит из четырех функциональных блоков:
- ШИМ генератор (0 … 100%), управляемый напряжением — интегральная схема LTC6992-1 (DD1).
- Блок обработки управляющего сигнала на микросхеме LM324 (DA1).
- Детектор направления и логическое управление приводом двигателя на микросхеме 74HC00 (DD2).
- Драйвер двигателя с защитой — интегральная микросхема DRV8871 (DD3).
Устройство питается от стабилизатора LM317 (DA2). Схема драйвера двигателя собрана на специализированной интегральной схеме DRV8871 (DD3). Блок-схема данной микросхемы показана на следующем рисунке.
Стенд для пайки со светодиодной подсветкой
Материал: АБС + металл + акриловые линзы.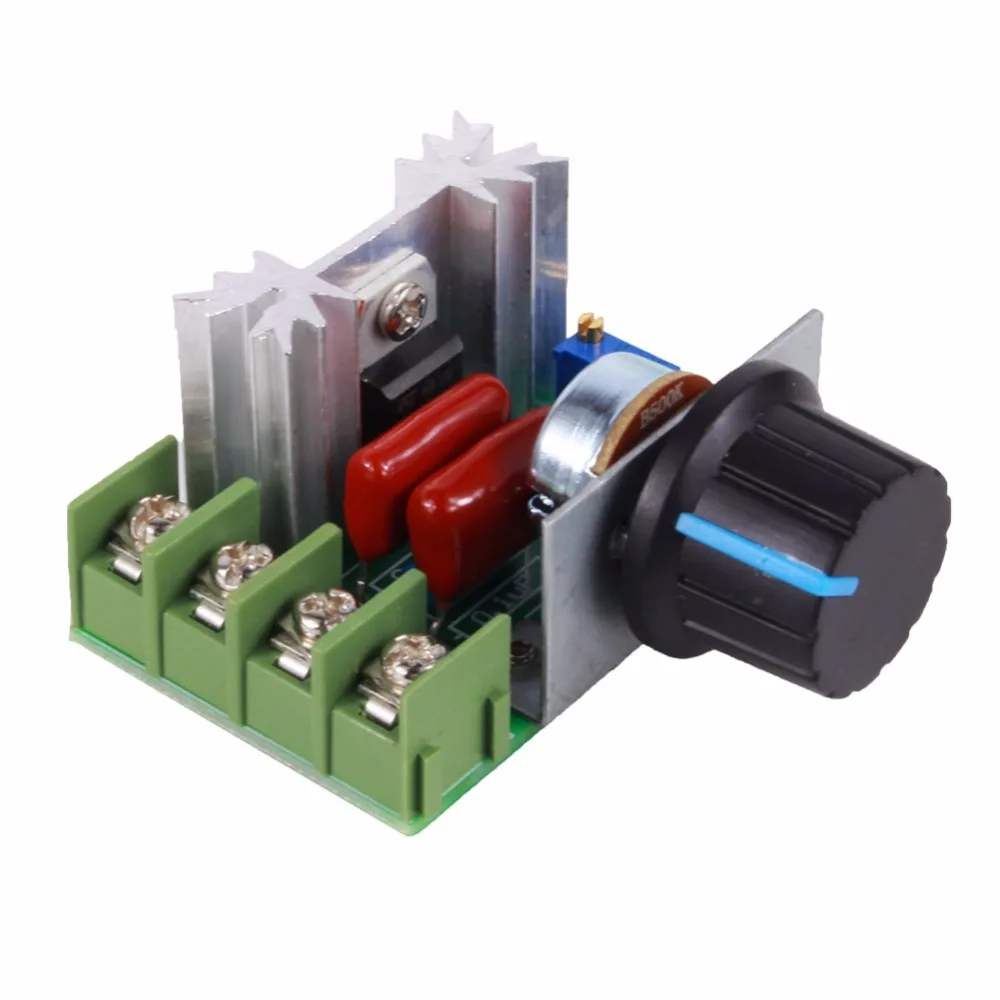 Светодиодная подсветка…
Светодиодная подсветка…
Микросхема DRV8871 содержит все компоненты, необходимые для реализации управления щеточным электродвигателем постоянного тока:
- два MOSFET полумоста с низким сопротивлением Rdson и систему измерения тока двигателя, для которой не требуются внешние компоненты
- защитную логику
- зарядовый насос для управления силовыми транзисторами,
- встроенную систему защиты от перегрузки
- тепловую защиту
- логику управления входом
Встроенный датчик тока двигателя не требует внешнего измерительного резистора, но по-прежнему можно изменить максимальный ток обмотки путем подключения соответствующего резистора к выводу Ilim, в соответствии с формулой:
Ilim = 64 / R8
В прототипе ток был установлен на уровне 2 А, что соответствует сопротивлению R8 около 33 кОм. Минимальное значение резистора составляет 15 кОм. Резистор следует подобрать в зависимости от используемого двигателя.
Направление вращения двигателя регулируется с использованием входов IN1 / IN2. Логические схемы, построенные с использованием микросхемы DD2 (74HC00), меняют способ управления на стандарт PWM/DIR. Двухцветный светодиод LED1 указывает на направление вращения и индикацию заполнения ШИМ.
Компаратор на операционном усилителе DA1.1 сравнивает напряжение с ползунка потенциометра ШИМ с опорным напряжением REF = 2,5 В, генерируя внутренний сигнал DIR, определяющий направление вращения двигателя.
Опорное напряжение является производным от напряжения питания 5 В (стабилизированный DA2) через резистивный делитель R23 / R24 и буферизуется через DA1.2.
Когда заполнение сигнала ШИМ равно 0%, двигатель останавливается, т. е. замыкается встроенными ключами к массе. Сигнал ШИМ генерируется микросхемой LTC6992-1 (DD1), блок-схема которой показана на следующем рисунке.
Данная микросхема содержит все блоки, необходимые для реализации генератора ШИМ с фиксированной частотой и регулируемым рабочим циклом. Опорная частота
СХЕМА РЕГУЛЯТОРА ОБОРОТОВ ДВИГАТЕЛЯ
Регулятор для двигателя переменного тока
На основе мощного симистора BT138-600, можно собрать схему регулятора скорости вращения двигателя переменного тока. Эта схема предназначена для регулирования скорости вращения электродвигателей сверлильных машин, вентиляторов, пылесосов, болгарок и др. Скорость двигателя можно регулировать путем изменения сопротивления потенциометра P1. Параметр P1 определяет фазу запускающего импульса, который открывает симистор. Схема также выполняет функцию стабилизации, которая поддерживает скорость двигателя даже при большой его нагрузке.
Принципиальная схема регулятора электромотора переменного питания
Например, когда мотор сверлильного станка тормозит из-за повышенного сопротивления металла, ЭДС двигателя также уменьшается. Это приводит к увеличению напряжения в R2-P1 и C3 вызывая более продолжительное открывание симистора, и скорость соответственно увеличивается.
Регулятор для двигателя постоянного тока
Наиболее простой и популярный метод регулировки скорости вращения электродвигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). При этом напряжение питания подается на мотор в виде импульсов. Частота следования импульсов остается постоянной, а их длительность может меняться — так меняется и скорость (мощность).
Для генерации ШИМ сигнала можно взять схему на основе микросхемы NE555. Самая простая схема регулятора оборотов двигателя постоянного тока показана на рисунке:
Принципиальная схема регулятора электромотора постоянного питания
Здесь VT1 — полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.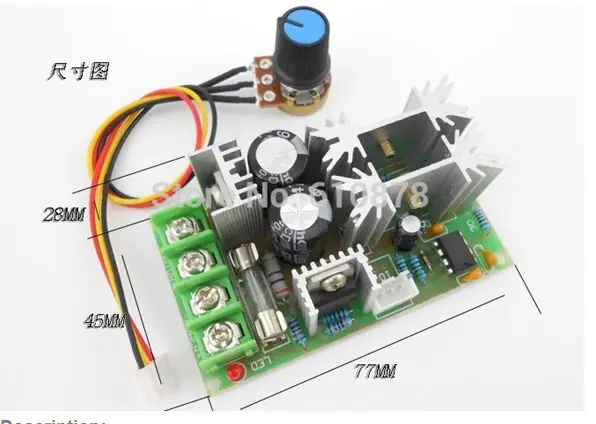 Частоту ШИМ сигнала можно рассчитать по формуле:
Частоту ШИМ сигнала можно рассчитать по формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 290 Гц.
Стоит отметить, что даже современные устройства, в том числе и высокой мощности управления, используют в своей основе именно такие схемы. Естественно с использованием более мощных элементов, выдерживающих большие токи.
Originally posted 2019-07-09 23:13:31. Republished by Blog Post Promoter
Регулирование скорости вращения коллекторного двигателя постоянного тока
Для подачи питания на обмотки ротора коллекторного двигателя постоянного тока используется встроенный коммутатор, получивший наименование коллектор. Конструктивный элемент состоит из медных пластин, изолированных друг от друга с помощью диэлектрика. По пластинам скользят графитовые щетки, попеременно подавая электрическое напряжение на разные обмотки ротора. В результате образуется переменное магнитное поле, взаимодействующее с постоянным полем статора. Так электрическая энергия преобразуется в механическую и вал двигателя начинает вращаться. На производстве и в быту применяется мотор-редуктор — система, состоящая из электродвигателя и редуктора. В качестве примера можно привести схему движения щеток лобового стекла автомобиля. Вращение ротора передается на цилиндрические колеса с косыми зубьями, которые приводят дворники в рабочее положение.
Регулирование оборотов двигателя постоянного тока методом ШИМ
Главные характеристики электродвигателя — мощность, скорость вращения и крутящий момент (иногда еще выделяют момент инерции ротора). От этих величин зависит, сможет ли электропривод справиться с возложенными на него задачами. В большинстве электрических сетей используется переменный ток, который перед подачей на щетки электромотора нужно сделать постоянным. Для этого используют выпрямители, в их схеме нередко предусмотрена возможность добавления дополнительных сегментов для регулировки напряжения. Основной недостаток выпрямителя заключается в том, что при его работе происходит существенная потеря мощности, а значит, снижается КПД и часть электроэнергии уходит в никуда.
Основной недостаток выпрямителя заключается в том, что при его работе происходит существенная потеря мощности, а значит, снижается КПД и часть электроэнергии уходит в никуда.
Для того, чтобы управление двигателем постоянного тока было эффективным, применяют широтно-импульсную модуляцию, сокращенно ШИМ. Принцип действия ШИМ можно объяснить на простом примере: если взять электрический мотор малой мощности и запитать его от батарейки, вал двигателя будет вращаться с максимальной скоростью, но если попеременно замыкать и размыкать контакты, идущие к источнику питания, частота вращения ротора изменится, какое-то время он будет двигаться по инерции. На щетки коллектора подается полное напряжение, а ШИМ позволяет установить точное время подачи. Способ дает возможность управлять вращением вала с применением цифровых микроконтроллеров.
Изменение скорости вращения ротора
Регулятор оборотов коллекторного двигателя подает на щетки импульсы.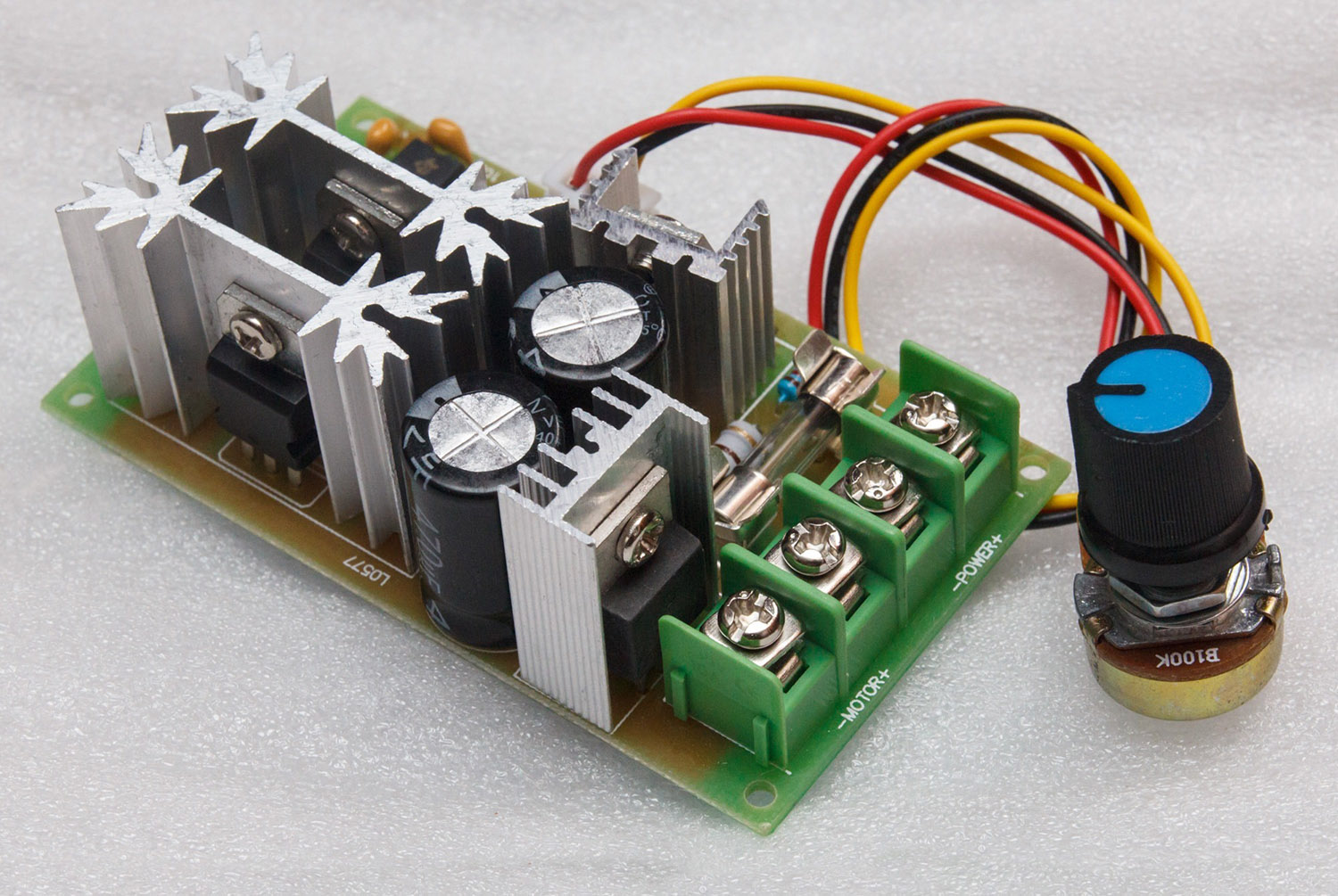 Например, максимальное напряжение электромотора 12 Вольт, а нам нужно, чтобы он работал в половину своей силы. Как реализовать это на практике, используя широтно-импульсную модуляцию? Для этого нужно рассмотреть понятие импульса — всплеска напряжения. Если таких всплесков в течение 1 секунды случается 10, то говорят о том, что частота импульсов составляет 10 Герц. То есть, за секунду на щетки электродвигателя 10 раз подается полное напряжение. Для начала нужно определить период следования импульсов T по формуле:
Например, максимальное напряжение электромотора 12 Вольт, а нам нужно, чтобы он работал в половину своей силы. Как реализовать это на практике, используя широтно-импульсную модуляцию? Для этого нужно рассмотреть понятие импульса — всплеска напряжения. Если таких всплесков в течение 1 секунды случается 10, то говорят о том, что частота импульсов составляет 10 Герц. То есть, за секунду на щетки электродвигателя 10 раз подается полное напряжение. Для начала нужно определить период следования импульсов T по формуле:
T=1/F,
где F — это частота. В нашем случае частота равна 10 Гц, тогда:
T=1/10=0,1 с,
то есть, напряжение поднимается от 0 Вольт до 12 и снова опускается до 0 за 0,1 секунды.
Еще одной важной характеристикой импульса является скважность S — это отношение периода следования к продолжительности импульса, не имеющее единиц измерения. Параметр определяется по формуле:
S=T/t,
где t — длина импульса. В нашем случае длина импульса составит половину от периода следования импульса, ведь нам нужен мотор, работающий вполсилы. Тогда получим:
В нашем случае длина импульса составит половину от периода следования импульса, ведь нам нужен мотор, работающий вполсилы. Тогда получим:
S=0,1/0,05=2.
Теперь вычислим, сколько процентов от максимального числа оборотов мы получим с нашими показателями, для этого найдем коэффициент заполнения D, выражаемый в процентах и вычисляемый по формуле:
D=1/S,
где S — полученная ранее скважность. Выполняем подсчет:
D=1/2=0,5.
Вычисляем проценты:
0,5*100=50%.
Если в течение секунды на обмотку электродвигателя мы 10 раз подадим напряжение, которое будет длиться 0,05 секунды, то получим скорость вращения, соответствующую 6 Вольтам напряжения. В нашем случае периоды подачи и отсутствия напряжения равны, но если нужно получить повышенное количество оборотов ротора, длину импульса t нужно увеличивать. Например, необходимо получить 75% от максимальной скорости вращения вала, тогда длина импульса t должна быть равна:
t=T-25%=0,1–25%=0,075 с,
то есть 75% времени периода следования импульсов нужно подавать ток.
Найдем скважность:
S=0,1/0,075=1,33.
Теперь вычислим коэффициент заполнения:
D=1/1,33=0,75*100=75%.
Это наглядный пример. В реальности после завершения подачи тока на щетки, вал электродвигателя продолжает двигаться по инерции, поэтому если угловая скорость ротора растет и не успевает уменьшиться в течение паузы, регулирование потеряет свою эффективность.
Способы торможения двигателя
Если используется мотор-редуктор, или электродвигатель с нагрузкой на вал, обеспечивающей быстрое торможение, то в принципиальной схеме ШИМ достаточно предусмотреть ключ и один диод. Во время работы ключ подает импульс на коллектор, отчего происходит разгон ротора, после прекращения подачи питания, вал затормаживается самостоятельно, благодаря статической нагрузке. При этом существует 2 основных режима работы:
- Режим непрерывного тока. Ток в якоре хотя и уменьшается во время паузы, но все же продолжает протекать в прежнем направлении.
- Режим прерывистого тока. Ток в якоре течет только во время действия импульса, на паузе напряжение равняется нулю.
На двигателях, которые работают без статической нагрузки, необходимо применять электрическое торможение. Для этого в принципиальную схему включают сопротивление. Во время паузы, ключ присоединяет якорь мотора к сопротивлению, для запуска процесса динамического торможения.
Виды преобразователей
Широтно-импульсные преобразователи, осуществляющие управление двигателем постоянного тока, состоят из силовой части, схемы управления и подразделяются на следующие виды:
- Тиристорные. Дополняются схемами с параллельной и последовательной искусственной коммутацией.
- С запираемыми тиристорами. Схема работы мало отличима от транзисторных.
- Транзисторные. Характеризуются низкой инерционностью и минимальным внутренним сопротивлением.
Широтно-импульсный регулятор оборотов коллекторного двигателя позволяет гибко настраивать скорость вращения ротора с минимальным показателем рассеивания мощности.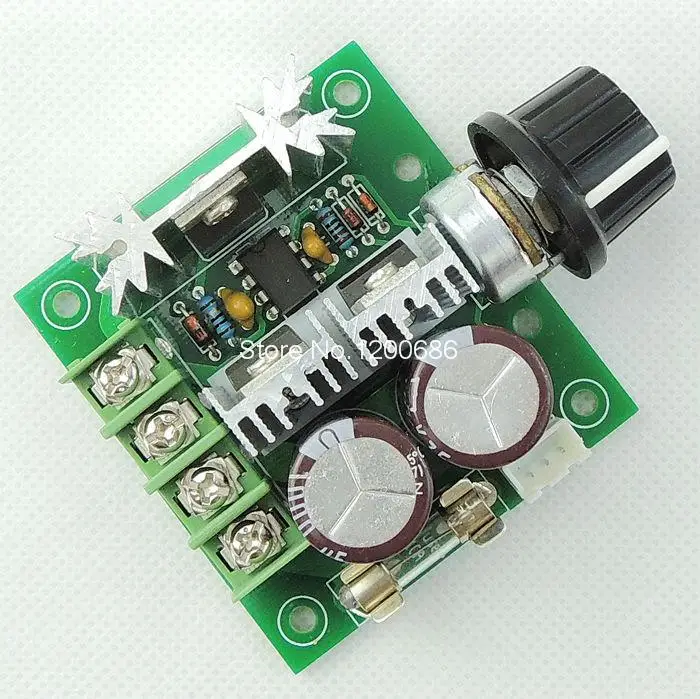
Так же по теме ШИМ регулирования предлагаем статью “Регулирование скорости вращения коллекторного двигателя постоянного тока”
ZK-MG, ШИМ регулятор оборотов двигателя постоянного тока в корпусе
Описание ZK-MG, ШИМ регулятор оборотов двигателя постоянного тока в корпусе
ШИМ контроллер двигателя ZK-MG в корпусе. Регулирует скорость мотора, индицирует на цифровой дисплей мощность в процентах, отличается возможность програмнно изменять частоту работы ШИМ.
1. Основные характеристики продукта:
1,1 оснащен контактами старт-стоп, и может быть подключен к внешним переключателем управления, чтобы удовлетворить различные требования к контролю вращения.
1,2 функция мягкого пуска двигателя. При запуске двигателя ток медленно увеличивается, и нет тока удара, который может эффективно защитить двигатель и продлить срок его службы
1,3 Рабочий цикл, верхний и нижний предел рабочего цикла и рабочая частота могут быть установлены для облегчения работы клиентов и использования их двигателей в соответствии с их рабочими характеристиками.
1,3 ручка цифрового кодировщика регулирует скорость двигателя, которая является более точной и последовательной, чем обычный потенциометр.
1,4 со стандартным корпусом 5135, удобным для установки клиентом.
2. Технические параметры: Модель: ZK-MG
2,1 Рабочее напряжение: 5 в пост. Тока ~ 30 В, защита от обратного подключения
2,2 Номинальный ток: при 30в= 5A максимальный ток 15A при 5 в.
2,3 Максимальная мощность: 150 Вт
2,2 Рабочая частота: 1 кГц ~ 99 кГц регулируемая, 1 кГц шаг, частота по умолчанию 20 кГц, точность около 1%
2,3 Рабочий цикл: 0-100%, 1% шаг
2,4 размер изделия: 79 мм * 43 мм * 26 мм
2,5 Вес изделия: 41 г
2,6 упаковка: картонная упаковка
3. Инструкции по эксплуатации:
3,2 управление цифровой ручкой кодировщика
В интерфейсе по умолчанию: (рабочий цикл отображается по умолчанию)
Короткое нажатие-переключатель запуска и остановки двигателя
Длительное нажатие-для входа в интерфейс настройки
Вращение против часовой стрелки-коэффициент нагрузки уменьшается
Вращение по часовой стрелке-увеличенный рабочий цикл
Под настройкой экрана:
Короткое нажатие-Выберите параметры настройки и переключитесь между нижним пределом рабочего цикла, верхним пределом рабочего цикла и рабочей частотой. Форма отображения нижнего предела рабочего цикла-«L» + две цифры, форма отображения верхнего предела рабочего цикла-«H» + две цифры или «100», И форма отображения рабочей частоты-«F» + две цифры.
Форма отображения нижнего предела рабочего цикла-«L» + две цифры, форма отображения верхнего предела рабочего цикла-«H» + две цифры или «100», И форма отображения рабочей частоты-«F» + две цифры.
Длительное нажатие-выход из интерфейса настройки
Вращение против часовой стрелки-соответствующие настройки уменьшены
Вращение по часовой стрелке-параметры настройки увеличиваются соответственно
3,3 задний стоп-порт
Клавиша переключения или уровень 3,3 В могут быть внешне подключены. Переключайте состояние запуска/остановки двигателя при закрытии ключа или снижении уровня 3,3 В.
Комплект поставки: контроллер двигателя постоянного тока
50A Регулятор скорости двигателя (PWM)
от CanaKit
- Напряжение питания / нагрузки: от 9 до 24 В постоянного тока (рекомендуется 12 В постоянного тока)
- Дополнительный ЖК-модуль
- Функция плавного пуска
- Максимальный длительный ток: 50 А при 100 Гц
- Частота:
- Фиксированная (100 Гц)
- Регулируемая ( 244 Гц до 3.
 125 кГц)
125 кГц) - Диапазон рабочего цикла ШИМ: 0% – 100%
- Высокоэффективная конструкция с использованием мощного полевого МОП-транзистора для охлаждения
- Включает большие двойные лопаточные клеммы для простоты подключения проводов
- Включает радиатор
- Включает вентилятор 12 В постоянного тока , В комплекте ручки
Описание товара
Управляйте скоростью двигателя постоянного тока без ущерба для крутящего момента.Этот контроллер двигателя постоянного тока с широтно-импульсной модуляцией (ШИМ) может обеспечивать максимальный непрерывный ток до 50 А для вашего двигателя постоянного тока или другой нагрузки постоянного тока благодаря конструкции на основе цифрового микроконтроллера (PIC) и высокоэффективному полевому МОП-транзистору высокой мощности для работы в режиме охлаждения. Также доступен дополнительный ЖК-модуль (деталь CanaKit # LCD1133), который будет точно указывать текущую установленную частоту и рабочий цикл для точного управления ШИМ-сигналом. Контроллер имеет два режима работы: фиксированная или регулируемая частота.В режиме работы с фиксированной частотой контроллер работает на частоте 100 Гц. В режиме работы с переменной частотой частота регулируется от 244 Гц до 3,125 кГц. Рабочий цикл полностью регулируется от 0% до 100% в обоих режимах. Контроллер также предлагает встроенную функцию плавного пуска, которая значительно снижает механическую нагрузку на двигатель, а также электродинамическую нагрузку на подключенные кабели и батарею, что увеличивает время автономной работы. продолжительность жизни всей системы. Когда питание подключено к цепи, рабочий цикл начинается с 0% и повышается до заданного значения примерно от 1 до 1.5 секунд. Вентилятор 12 В постоянного тока входит в комплект поставки контроллера мотора для надежной и надежной непрерывной работы при высоких нагрузках. Обратите внимание, что вентилятор постоянного тока рассчитан только на работу с напряжением питания до 12 В постоянного тока. Области применения: управление двигателем, HHO, диммер постоянного / светодиодного света, управление нагревом и т.
Контроллер имеет два режима работы: фиксированная или регулируемая частота.В режиме работы с фиксированной частотой контроллер работает на частоте 100 Гц. В режиме работы с переменной частотой частота регулируется от 244 Гц до 3,125 кГц. Рабочий цикл полностью регулируется от 0% до 100% в обоих режимах. Контроллер также предлагает встроенную функцию плавного пуска, которая значительно снижает механическую нагрузку на двигатель, а также электродинамическую нагрузку на подключенные кабели и батарею, что увеличивает время автономной работы. продолжительность жизни всей системы. Когда питание подключено к цепи, рабочий цикл начинается с 0% и повышается до заданного значения примерно от 1 до 1.5 секунд. Вентилятор 12 В постоянного тока входит в комплект поставки контроллера мотора для надежной и надежной непрерывной работы при высоких нагрузках. Обратите внимание, что вентилятор постоянного тока рассчитан только на работу с напряжением питания до 12 В постоянного тока. Области применения: управление двигателем, HHO, диммер постоянного / светодиодного света, управление нагревом и т.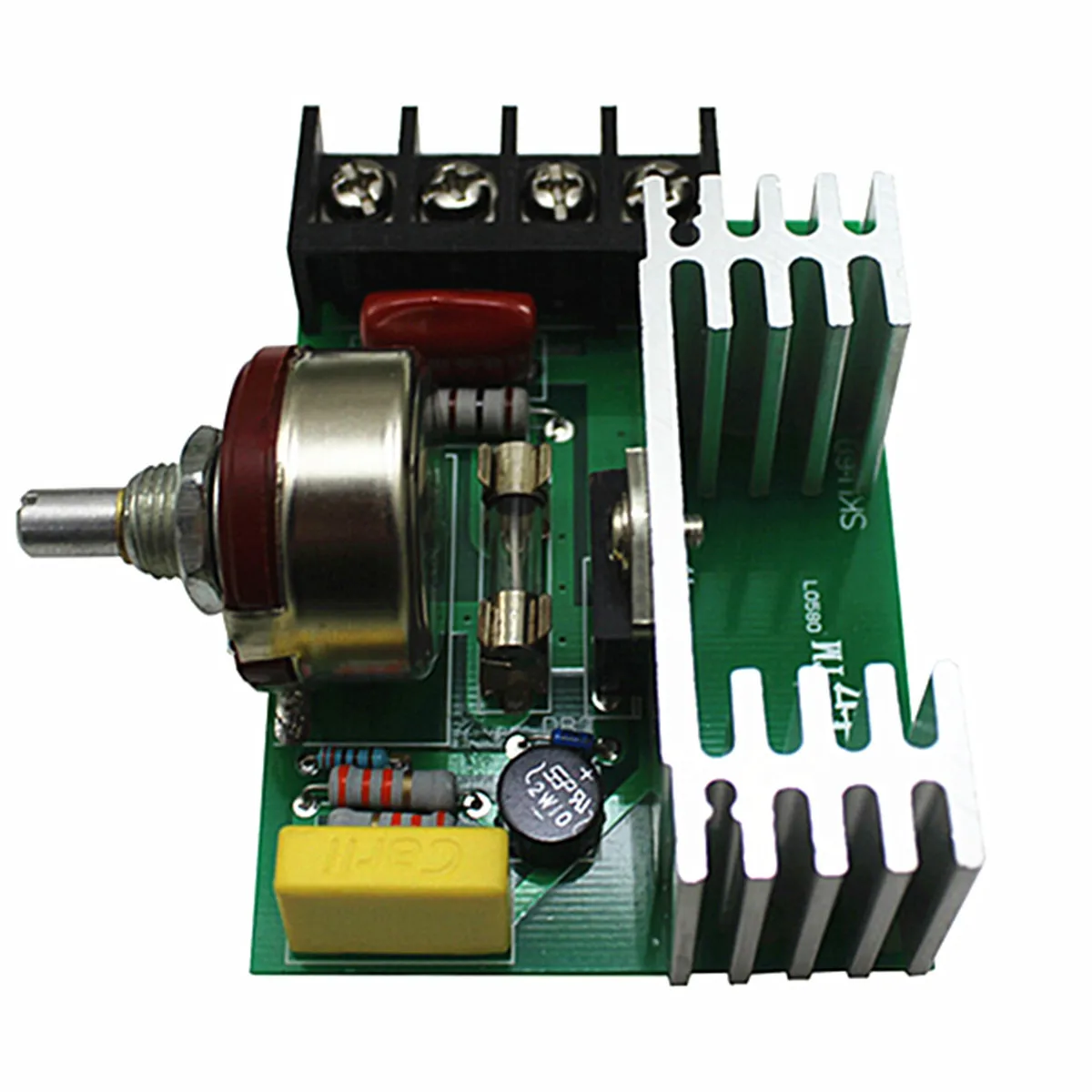 Д. Размеры: 4,03 “x 2,82”
Д. Размеры: 4,03 “x 2,82”
Как управляются двигатели постоянного тока? – Контроль скорости двигателей постоянного тока
Электродвигателипостоянного тока питаются от постоянного тока.Они имеют широкий спектр применения в таких продуктах, как бытовая техника, автомобили и фабрики. Можно сказать, что они играют жизненно важную роль в нашей жизни.
Однако многие пользователи выражают неуверенность в том, как управлять скоростью двигателей постоянного тока. На этой странице представлено простое введение в то, как это делается.
Что такое двигатель постоянного тока?
Во-первых, электродвигатель – это машина, которая использует электричество для вращения вала, тем самым преобразуя электрическую энергию в механическую.Электродвигатели в общих чертах делятся на следующие три типа.
- Двигатели постоянного тока
- Двигатели переменного тока
- Шаговые двигатели
переменного тока приводятся в движение переменным током, а шаговые двигатели – импульсами электроэнергии. С другой стороны, двигатели постоянного тока питаются от постоянного тока и имеют следующие особенности.
С другой стороны, двигатели постоянного тока питаются от постоянного тока и имеют следующие особенности.
- Высокий пусковой момент и возможность вращения на высоких скоростях
- Мощность двигателя пропорциональна приложенному напряжению
подразделяются на щеточные двигатели постоянного тока и бесщеточные двигатели постоянного тока.Щеточные двигатели постоянного тока имеют катушки в роторе и изменяют способ протекания тока через катушки на основе механизма с использованием коммутаторов и щеток. Щеточные двигатели постоянного тока генерируют электрический и акустический шум и требуют частого обслуживания, поскольку их щетки и коммутатор являются расходными частями. Но они также имеют простую конструкцию и могут работать без электронной схемы привода, если регулирование скорости не требуется.
Бесщеточный двигатель постоянного тока, напротив, избавляет от необходимости в коммутаторе и щетках за счет наличия постоянного магнита в роторе. Это, однако, означает, что они требуют схемы возбуждения. Они также отличаются низкими эксплуатационными расходами, бесшумной работой и длительным сроком службы.
Это, однако, означает, что они требуют схемы возбуждения. Они также отличаются низкими эксплуатационными расходами, бесшумной работой и длительным сроком службы.
Характеристики двигателей постоянного тока
В отличие от двигателей переменного тока, двигатели постоянного тока очень просты в использовании из-за легкости изменения их скорости. Итак, как этого добиться на практике? Следующее объяснение начинается с рассмотрения характеристик двигателя постоянного тока.
Характеристики двигателя постоянного тока представлены кривой крутящего момента-скорости, которая наклоняется вниз вправо, с крутящим моментом в качестве горизонтальной оси и скоростью в качестве вертикальной оси.Скорость максимальна при отсутствии нагрузки, снижаясь вправо до достижения максимального крутящего момента при нулевой скорости.
Крутящий момент и скорость меняются в зависимости от нагрузки, как показано этой кривой крутящего момента-скорости. Глядя на график ниже, давайте рассмотрим двигатель, вращающийся со скоростью ω0 с крутящим моментом T0. Если крутящий момент нагрузки затем увеличивается до T1, скорость двигателя будет следовать за крутящим моментом до новой скорости ω1. Аналогично, если крутящий момент нагрузки затем увеличивается до T2, скорость падает до ω2.
Если крутящий момент нагрузки затем увеличивается до T1, скорость двигателя будет следовать за крутящим моментом до новой скорости ω1. Аналогично, если крутящий момент нагрузки затем увеличивается до T2, скорость падает до ω2.
Крутящий момент и скорость двигателя постоянного тока
Взгляд на соотношение между крутящим моментом и током показывает, что они пропорциональны друг другу.Отношение между ними является постоянным для двигателя, причем соотношение остается неизменным независимо от изменений скорости двигателя или напряжения привода. Это означает, что измерения силы тока двигателя достаточно для определения крутящего момента двигателя.
Кривая крутящего момента-скорости двигателя постоянного тока и крутящего момента-тока
Что происходит при изменении напряжения привода?
Итак, что происходит с кривой крутящий момент-скорость, когда изменяется напряжение, используемое для привода двигателя постоянного тока? На приведенном ниже графике показаны кривые крутящий момент-скорость для различных напряжений. Удвоение напряжения привода увеличивает вдвое как скорость двигателя без нагрузки, так и пусковой крутящий момент (крутящий момент, когда двигатель заблокирован в положении). Другими словами, увеличение напряжения сдвигает кривую крутящий момент-скорость параллельно вверх. Кривая крутящего момента-скорости для двигателя постоянного тока может быть отрегулирована по желанию путем изменения напряжения, подаваемого на двигатель.
Удвоение напряжения привода увеличивает вдвое как скорость двигателя без нагрузки, так и пусковой крутящий момент (крутящий момент, когда двигатель заблокирован в положении). Другими словами, увеличение напряжения сдвигает кривую крутящий момент-скорость параллельно вверх. Кривая крутящего момента-скорости для двигателя постоянного тока может быть отрегулирована по желанию путем изменения напряжения, подаваемого на двигатель.
Кривая напряжения и крутящего момента привода двигателя
Как заставить двигатель постоянного тока вращаться с необходимой скоростью
Теперь, учитывая эти характеристики, как можно вращать двигатель с требуемой скоростью при любом заданном моменте нагрузки?
Кривая крутящего момента двигателя постоянного тока преобразуется с изменениями напряжения привода.Это означает, что вышеуказанная цель может быть достигнута путем простой регулировки напряжения возбуждения. Если посмотреть на график ниже, если требуется вращение со скоростью ω1, когда крутящий момент нагрузки равен T0, например, напряжение привода V4 слишком низкое, что приводит к скорости ω2. Напряжение возбуждения V0 слишком велико, что приводит к скорости ω0. Однако управление двигателем при промежуточном напряжении V3 является правильным для достижения желаемой скорости ω1.
Напряжение возбуждения V0 слишком велико, что приводит к скорости ω0. Однако управление двигателем при промежуточном напряжении V3 является правильным для достижения желаемой скорости ω1.
Напряжение и скорость привода двигателя
Регулируя таким образом напряжение привода, двигатель постоянного тока может вращаться с желаемой скоростью независимо от момента нагрузки.
Методы контроля напряжения привода
Два способа регулировки напряжения привода: линейное управление и ШИМ-управление.
Линейное управление работает путем включения переменного резистора последовательно с двигателем и регулировки сопротивления для изменения напряжения на двигателе. Хотя в качестве последовательно подключенного переменного резистора можно использовать транзистор или другое полупроводниковое устройство, этот подход имеет низкую эффективность из-за большого количества тепла, выделяемого сопротивлением (полупроводник), и поэтому в наши дни он редко используется.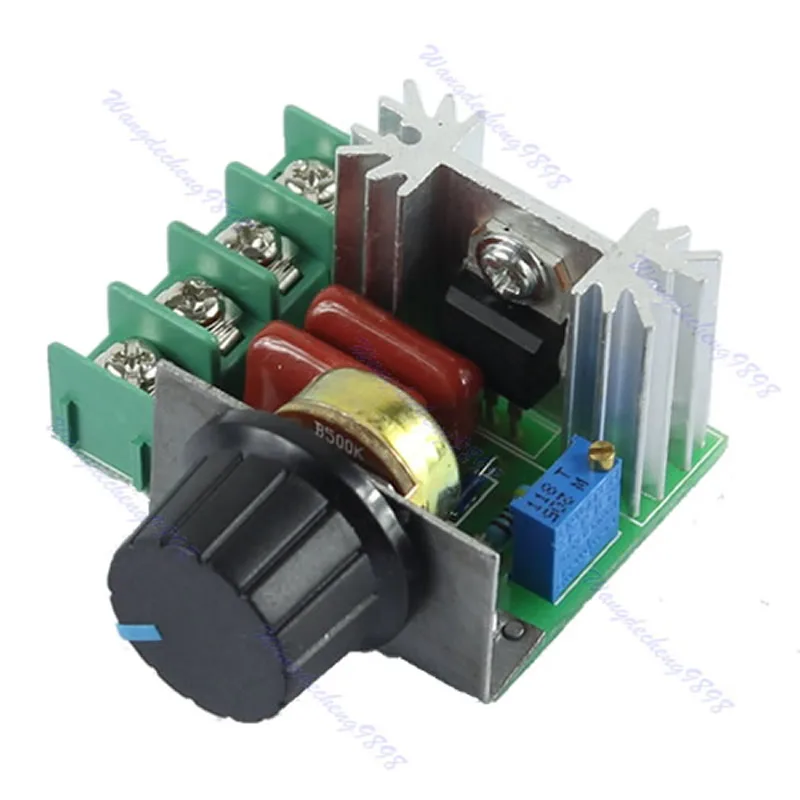
Альтернативный способ – управление ШИМ. Напряжение, подаваемое на двигатель, можно изменять путем включения и выключения полупроводникового переключателя (например, транзистора или полевого транзистора) на высокой скорости, при этом напряжение определяется шириной импульса включения и выключения. Высокая эффективность этого метода делает его наиболее распространенным в настоящее время.
Линейное управление
ШИМ-контроль
Контроль скорости двигателя
Использование этих методов позволяет гибко регулировать скорость двигателя постоянного тока.Однако требуется дополнительный контроль, чтобы двигатель работал с постоянной скоростью. Это связано с тем, что момент нагрузки двигателя изменяется из-за самой нагрузки, а также других факторов, таких как температура, влажность и изменения во времени. Простое управление двигателем с постоянным напряжением приведет к колебаниям его скорости при изменении нагрузки.
Поддержание постоянной скорости, несмотря на переменную нагрузку, требует постоянной регулировки напряжения привода в ответ на эти изменения нагрузки. На приведенном ниже графике показан пример, в котором момент нагрузки для двигателя, работающего со скоростью ω0, уменьшается с T1 до T0, и в этом случае уменьшение напряжения привода до V0 поддерживает скорость двигателя на уровне ω0. Если вместо этого крутящий момент увеличивается до T2, поддержание постоянной скорости двигателя ω0 требует увеличения напряжения привода до V2.
На приведенном ниже графике показан пример, в котором момент нагрузки для двигателя, работающего со скоростью ω0, уменьшается с T1 до T0, и в этом случае уменьшение напряжения привода до V0 поддерживает скорость двигателя на уровне ω0. Если вместо этого крутящий момент увеличивается до T2, поддержание постоянной скорости двигателя ω0 требует увеличения напряжения привода до V2.
Контроль скорости
Скорость измеряется датчиком, прикрепленным к двигателю. Вычисляется разница между измеренной и желаемой скоростью двигателя (погрешность скорости), и напряжение привода регулируется таким образом, что оно увеличивается, если скорость слишком низкая, и уменьшается, если скорость слишком высокая.Это позволяет поддерживать постоянную скорость двигателя. В то время как в прошлом для управления напряжением привода использовались операционные усилители или другие аналоговые схемы, в последние годы использование микрокомпьютеров стало нормой.
Принципиальная схема управления скоростью двигателя постоянного тока
Схема управления скоростью бесщеточного двигателя постоянного тока
- Датчик скорости
Выводит сигнал, указывающий скорость двигателя.
 Для этого используются датчики на эффекте Холла, энкодеры и тахогенераторы.
Для этого используются датчики на эффекте Холла, энкодеры и тахогенераторы. - Цепь определения скорости
Рассчитывает скорость двигателя по сигналу датчика скорости.
- Задание скорости
Выводит заданную скорость двигателя.
- Компаратор
Вычисляет разницу между заданной скоростью и измеренной скоростью.
- Схема расчета управляющего напряжения
Рассчитывает напряжение привода двигателя на основе вычисленной ошибки скорости.
- Цепь привода
Схема, которая регулирует напряжение, подаваемое на двигатель, в соответствии с сигналом напряжения привода.
Двигатель постоянного тока может достигать устойчивой работы, контролируя его скорость, чтобы оставаться постоянной независимо от изменений нагрузки.Эти двигатели также подходят для самых разных методов управления, которые можно реализовать с помощью микрокомпьютера. Двигатели постоянного тока находят применение во многих различных приложениях, в которых используется простота управления.
Двигатели постоянного тока: простые в использовании двигатели с простой регулировкой частоты вращения
Двигателипостоянного тока питаются от постоянного тока, и, в отличие от двигателей переменного тока, их скорость легко регулируется. Характеристики двигателя постоянного тока представлены его кривой крутящего момента-скорости, в которой скорость и крутящий момент нагрузки обратно пропорциональны.Эта кривая крутящего момента-скорости транслируется с изменениями напряжения привода. Соответственно, регулируя напряжение, подаваемое на двигатель постоянного тока, можно заставить его работать с любой скоростью независимо от момента нагрузки.
Для изменения напряжения привода двигателя можно использовать линейное или ШИМ-управление. ШИМ-управление стало преобладать в последние годы из-за его превосходной эффективности. ШИМ-управление изменяет напряжение путем включения и выключения полупроводникового переключателя с высокой скоростью таким образом, чтобы изменение ширины импульса включения и выключения изменяло напряжение.
Преодоление проблем с бесщеточными двигателями постоянного тока
ASPINA поставляет не только автономные бесщеточные двигатели постоянного тока, но и системные продукты, которые включают системы привода и управления, а также механическую конструкцию. Они подкреплены всесторонней поддержкой, которая простирается от прототипирования до коммерческого производства и послепродажного обслуживания.
ASPINA может предложить решения, адаптированные к функциям и характеристикам, требуемым для различных отраслей промышленности, приложений и продуктов клиентов, а также для конкретных производственных условий.
ASPINA поддерживает не только клиентов, которые уже знают свои требования или спецификации, но и тех, кто сталкивается с проблемами на ранних этапах разработки. Вы боретесь со следующими проблемами?
- Выбор двигателя
- У вас еще нет подробных спецификаций или чертежей, но нужна консультация по двигателям?
- У вас нет сотрудников, имеющих опыт работы с двигателями, и вы не можете определить, какой тип двигателя лучше всего подойдет для вашего нового продукта?
- Разработка двигателей и связанных компонентов
- Хотите сосредоточить свои ресурсы на основных технологиях и передать на аутсорсинг приводные системы и разработку двигателей?
- Хотите сэкономить время и силы, связанные с изменением конструкции существующих механических компонентов при замене двигателя?
- Уникальное требование
- Нужен нестандартный двигатель для вашего продукта, но ваш обычный поставщик отказался от него?
- Не можете найти двигатель, который дает вам необходимый контроль, и вот-вот теряете надежду?
Ищете ответы на эти проблемы? Свяжитесь с ASPINA, мы здесь, чтобы помочь.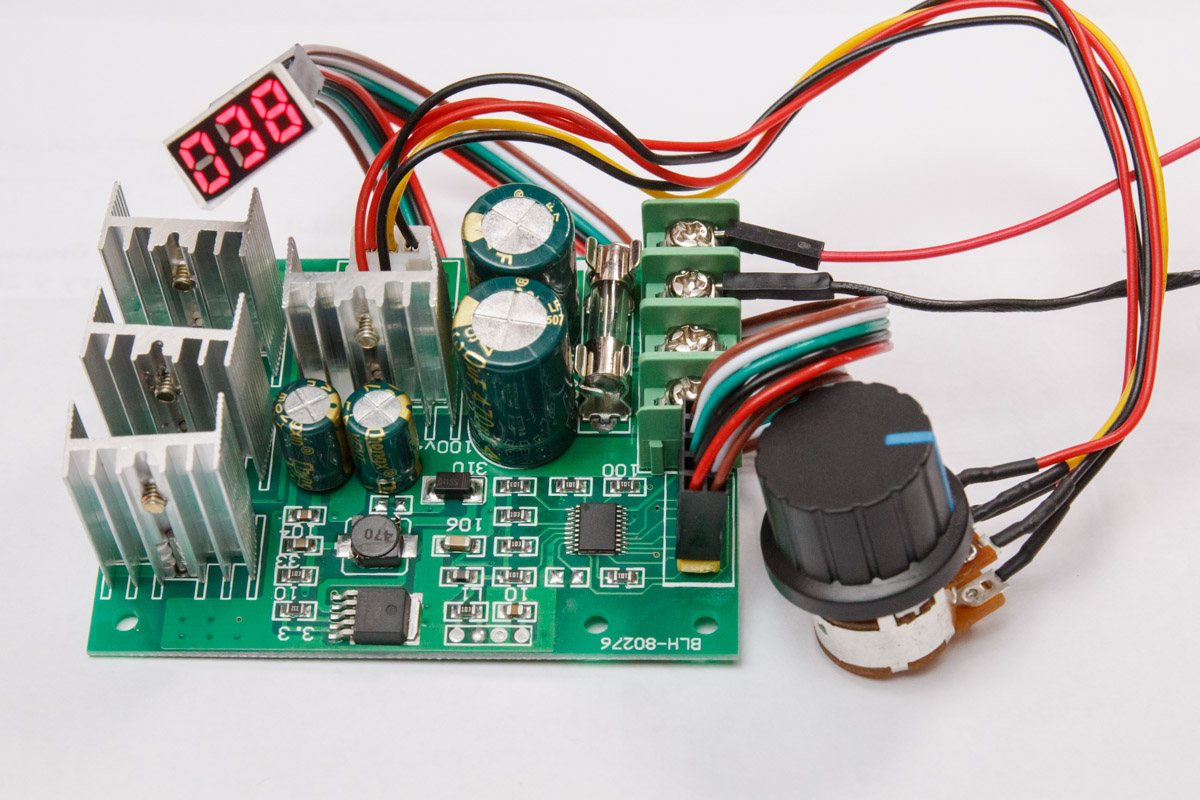
Ссылки на глоссарий и страницы часто задаваемых вопросов
Контроллеры скоростидля двигателей постоянного тока и BL
Контроллеры скорости FAULHABER специально разработаны для получения максимальной отдачи от двигателей FAULHABER DC и BL. Они компактны, просты в эксплуатации и обеспечивают точное и эффективное управление скоростью. Индивидуальное регулирование скорости можно легко настроить с помощью компьютера и бесплатного программного обеспечения «FAULHABER Motion Manager».
Speed Control от FAULHABER – это высокодинамичные контроллеры скорости для управления:
В зависимости от размера и состояния поставки на контроллере скорости могут использоваться различные комбинации двигателей и датчиков.Различные размеры, а также гибкие возможности подключения открывают широкий спектр применений в таких областях, как лабораторная техника и производство оборудования, технологии автоматизации, манипуляционные и инструментальные устройства, станки или насосы.
от FAULHABER могут быть адаптированы к данному приложению с помощью программного обеспечения FAULHABER Motion Manager. С помощью контроллеров скорости можно настроить рабочий режим, параметры контроллера, а также тип и масштаб спецификации уставки.Для настройки контроллеров скорости используется USB-адаптер для программирования.
Режимы работы двигателей в сочетании с регуляторами скорости
Скорость двигателя регулируется с помощью ПИ-регулятора с изменяемыми параметрами. В зависимости от версии, скорость в регуляторе скорости определяется через подключенную сенсорную систему или без сенсора по току двигателя. Задание уставки может быть выполнено с использованием аналогового значения или сигнала ШИМ. Направление вращения меняется на противоположное с помощью отдельного переключающего входа.Кроме того, можно считывать сигнал скорости контроллера скорости через частотный выход. Двигатели могут дополнительно работать в качестве регулятора напряжения или в режиме фиксированной скорости.
FAULHABER Регуляторы скорости определяют температуру обмотки двигателя по его нагрузочной характеристике. Динамически в результате доступен пиковый ток, который обычно в 2 раза больше, чем постоянный ток.При постоянно более высокой нагрузке ток ограничивается установленным постоянным током. В случае частого реверсирования с большими присоединенными массами рекомендуется использовать контроллер движения.
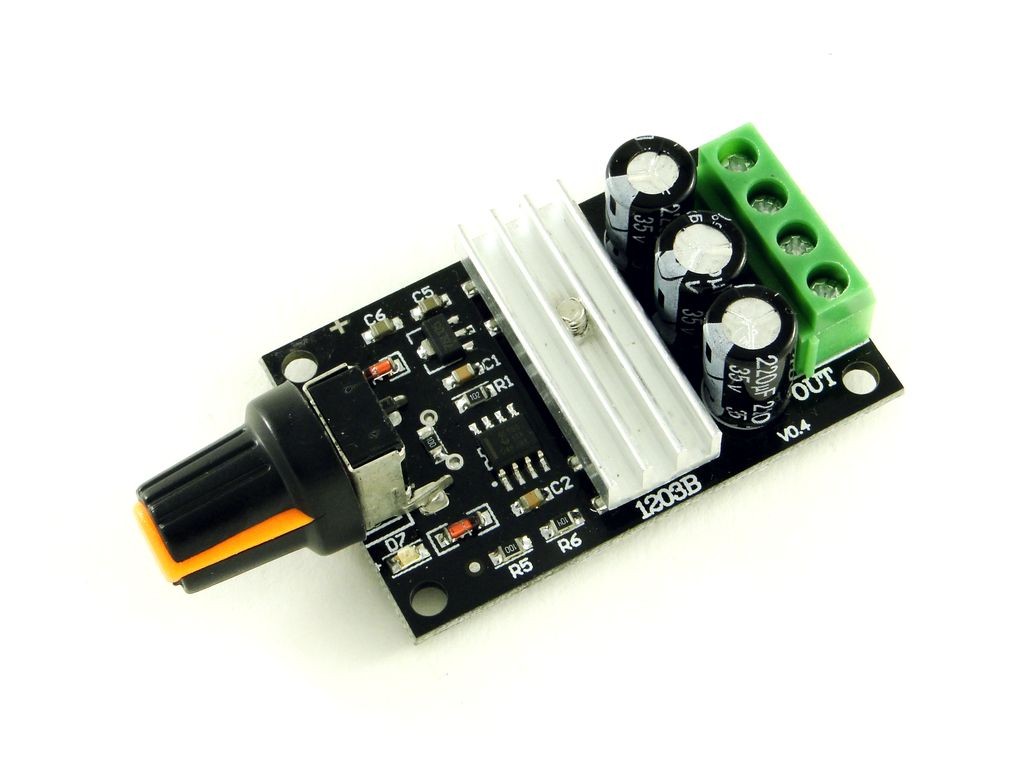
Купить 1,8 – 12В 2A ШИМ-контроллер скорости двигателя постоянного тока онлайн
ШИМ-регулятор скорости двигателя постоянного тока 1.8V, 3V, 5V, 6V, 12V-2A Функция переключателя управления скоростью для двигателей постоянного тока позволяет управлять направлением двигателя постоянного тока с помощью широтно-импульсной модуляции (PWM) постоянного напряжения с рабочим циклом полностью регулируемый от 0% до 100%.
Контроллер скорости двигателя может легко обеспечить постоянный ток 2А для вашего двигателя постоянного тока или другой нагрузки постоянного тока. Этот контроллер скорости двигателя позволяет управлять направлением двигателя постоянного тока с помощью напряжения постоянного тока с широтно-импульсной модуляцией (ШИМ).
Этот контроллер скорости двигателя позволяет управлять направлением двигателя постоянного тока с помощью напряжения постоянного тока с широтно-импульсной модуляцией (ШИМ).
С самовосстанавливающимся предохранителем он может автоматически разрывать соединение и автоматически восстанавливать его. Со светодиодным индикатором и поворотным переключателем, удобно использовать.
Инструкция по эксплуатации: 1. Подключите двигатель постоянного тока (или нагрузку постоянного тока) к клеммам двигателя, как показано на схеме подключения.
2. Подключите к цепи напряжение 1,8–15 В постоянного тока, соблюдая полярность подключения. Обратите внимание, что напряжение, приложенное к двигателю, будет напряжением питания, приложенным к цепи.
3. Теперь вы можете контролировать скорость двигателя с помощью потенциометра .
Характеристики:
- Выходной ток: 2А (макс.
 ).
). - С самовосстанавливающимся предохранителем.
- Оборудован светодиодным индикатором.
- Потенциометр с функцией переключения для регулировки ШИМ.
В коплект входит:
1 x ШИМ-регулятор скорости двигателя постоянного тока
Гарантия 15 днейНа этот товар распространяется стандартная гарантия сроком 15 дней с момента доставки только в отношении производственных дефектов. Эта гарантия предоставляется клиентам Robu в отношении любых производственных дефектов. Возмещение или замена производятся в случае производственных дефектов.
Что аннулирует гарантию:
Если продукт подвергся неправильному использованию, вмешательству, статическому разряду, аварии, повреждению водой или огнем, использованию химикатов, пайке или каким-либо изменениям.
Контроллеры электродвигателей постоянного тока, потенциометр электродвигателя, контроллер постоянного тока 12 В
Несмотря на то, что электродвигатели являются одной из самых старых конструкций электродвигателей, электродвигатели постоянного тока по-прежнему актуальны и регулярно используются в современной промышленности. Их управляемость является залогом их долговечности – даже самая простая машина может преобразовать постоянный ток в механическое вращение.
Их управляемость является залогом их долговечности – даже самая простая машина может преобразовать постоянный ток в механическое вращение.
Продолжение производства двигателей постоянного тока привело к производству контроллеров двигателей постоянного тока, которые часто имеют простую конструкцию, но обеспечивают отличную производительность. Если вы ищете программируемый контроллер двигателя для вашего приложения или проекта, вы найдете то, что вам нужно, здесь, в Allied Electronics.
Прочтите, чтобы узнать больше о контроллерах двигателей постоянного тока и их использовании.
Что такое контроллеры двигателей постоянного тока?
Контроллеры двигателей постоянного тока – это устройства, которые могут управлять положением, скоростью или крутящим моментом двигателя постоянного тока.Существует ряд контроллеров, от щеточных и бесщеточных до универсальных, каждый из которых позволяет оператору настраивать желаемое поведение двигателя с помощью своих механизмов.
Кривая крутящего момента двигателя постоянного тока обратно линейна, что означает, что их крутящий момент пропорционально уменьшается с увеличением числа оборотов двигателя. Это упрощает управление ими с помощью программируемого контроллера мотора, так как снижение их скорости увеличивает их крутящий момент, и наоборот.
Для чего используются контроллеры двигателей постоянного тока?
Благодаря функциональности контроллеров двигателей постоянного тока они идеально подходят для ряда приложений.Их часто можно увидеть в солнечных панелях или батареях благодаря их превосходной способности запускать высокий крутящий момент и управлять высокоинерционными нагрузками, их скорость намного легче контролировать по сравнению с двигателями переменного тока.
Если вы хотите изменить направление своего приложения или проекта, вам подойдут двигатели постоянного тока и программируемые контроллеры двигателей. В отличие от двигателей переменного тока, вы можете быстро и легко запускать и останавливать двигатели постоянного тока.
Почему стоит выбрать Allied Electronics для контроллеров двигателей постоянного тока?
Allied Electronics предлагает широкий выбор контроллеров двигателей постоянного тока, благодаря чему вы можете сузить область поиска до нужного вам типа.Функция поиска позволяет выполнять фильтрацию по таким параметрам, как фаза, стиль монтажа, номинальный ток и номинальное напряжение, поэтому вы можете легко использовать это, чтобы найти точное соответствие для работы, над которой вы работаете.
Мы являемся ведущим авторизованным дистрибьютором контроллеров двигателей постоянного тока 12 В и других программируемых контроллеров двигателей в Северной Америке. У нас есть товары ведущих производителей, включая Siemens, Arcus Technology, Carlo Gavazzi и Adafruit Industries. Выбирая Allied Electronics, вы инвестируете в надежный и долговечный продукт.
Если у вас возникнут какие-либо вопросы, наша команда всегда готова помочь, так почему бы не связаться с вами, и мы сможем помочь вам в выборе продуктов. Вы также можете найти совет в нашем центре содержания для экспертов.
Все о контроллерах двигателей постоянного тока
Двигатели постоянного тока по-прежнему актуальны в современной промышленности, даже несмотря на то, что они являются одними из старейших электродвигателей. Как они выдержали испытание временем, особенно против всех удивительных новых машин 21 века?
Есть много потенциальных ответов на этот вопрос, но их хорошая управляемость является основной причиной того, что двигатели постоянного тока сохранились.Эта простая машина преобразует постоянный ток в механическое вращение, которым можно управлять, просто изменяя входное напряжение или меняя местами его провода. Элегантность двигателей постоянного тока привела к производству многих контроллеров двигателей постоянного тока, которые часто имеют простую конструкцию и обеспечивают адекватную производительность при их стоимости. В этой статье мы рассмотрим некоторые распространенные контроллеры двигателей постоянного тока, как они работают, и обсудим, какие приложения наиболее популярны для этих систем.
Что такое контроллеры двигателей постоянного тока?
Проще говоря, контроллер двигателя постоянного тока – это любое устройство, которое может управлять положением, скоростью или крутящим моментом двигателя постоянного тока.Существуют контроллеры для щеточных двигателей постоянного тока, бесщеточных двигателей постоянного тока, а также универсальных двигателей, и все они позволяют операторам устанавливать желаемое поведение двигателя, даже если их механизмы для этого различаются.
Наши статьи о параллельных двигателях постоянного тока, двигателях постоянного тока с последовательной обмоткой и бесщеточных двигателях постоянного тока содержат подробные объяснения того, как работают машины постоянного тока. Подводя итог, можно сказать, что кривая скорость / крутящий момент двигателей постоянного тока обратно линейна, что означает, что их крутящий момент пропорционально уменьшается с увеличением числа оборотов двигателя.Это позволяет упростить управление, так как снижение скорости приведет к увеличению крутящего момента, и наоборот. Кроме того, в отличие от некоторых двигателей переменного тока, двигатели постоянного тока легко реверсируются простым переключением их проводов, так что постоянный ток течет в противоположном направлении. Контроллеры двигателей постоянного тока используют эти характеристики уникальным образом, и в этой статье будут рассмотрены наиболее популярные методы.
Типы контроллеров двигателей постоянного тока
Ниже приведены некоторые распространенные методы управления двигателем постоянного тока. Обратите внимание, что эти методы не являются исчерпывающими и что двигателями постоянного тока можно управлять разными способами, включая контроллеры серводвигателей (подробнее см. В нашей статье о контроллерах серводвигателей):
Контроллер направления: H-мост
Н-мостовая схема – один из простейших методов управления двигателем постоянного тока.На рисунке 1 ниже показана упрощенная принципиальная схема H-моста:
Рисунок 1: Н-мостовая схема для управления направлением двигателя постоянного тока.
Четыре переключателя управляются парами (1 и 4, 2 и 3), и когда любая из этих пар замыкается, они замыкают цепь и приводят двигатель в действие. Следовательно, четырехквадрантный двигатель может быть создан путем соединения определенных переключателей вместе, при этом изменение полярности будет по-разному влиять на двигатель. По сути, эта схема переключает выводы двигателя постоянного тока, который по команде меняет направление вращения.Они легко продаются в виде микросхем и могут быть найдены в большинстве контроллеров на основе микропроцессоров, поскольку H-мост может быть уменьшен с помощью транзисторов до очень малых размеров.
Н-мосты не только могут изменять направление вращения двигателя, но также могут использоваться для регулирования скорости. Если требуется только направленное управление, тогда H-мост будет использоваться в качестве так называемого безрегенеративного привода постоянного тока. Однако создание рекуперативных приводов постоянного тока может быть усложнено. На рисунке 2 показан график, показывающий, как работают рекуперативные приводы:
Рис. 2: графики, представляющие направление скорости и крутящего момента при изменении полярности двигателя постоянного тока.Обратите внимание, как создается движение, когда они работают в одном направлении, и как достигается разрыв, когда они находятся в оппозиции.
Большинство двигателей постоянного тока замедляются за счет отключения питания двигателя; Рекуперативные приводы включают возможность торможения, когда переключение полярностей во время работы двигателя вызывает замедление. Квадранты 1 и 3 считаются «автомобильными» квадрантами, где двигатель обеспечивает ускорение в любом направлении, и это то, что контролируют нерегенеративные приводы.Квадранты 2 и 4 считаются «тормозными» квадрантами, в которых двигатель замедляется, и именно от них выигрывают рекуперативные приводы. Когда скорость двигателя противоположна крутящему моменту двигателя, двигатель становится генератором, в котором его механическая энергия направляет ток обратно к источнику питания (известное как «рекуперативное торможение»). Эта функция снижает потери энергии и может подзаряжать источник питания, эффективно увеличивая КПД двигателя. На рисунке 3 показана упрощенная принципиальная схема для каждого квадранта, а также то, как квадранты 2 и 4 отправляют ток обратно в источник для регенерации энергии:
Рисунок 3: Принципиальные схемы для каждого квадранта, показывающие величины напряжения двигателя и напряжения питания.Обратите внимание, как направление тока (I
a ) перемещается от двигателя к источнику питания в квадрантах 2 и 4.Когда двигатель замедляется, E a (напряжение, создаваемое / используемое двигателем) больше, чем напряжение питания (V a ), и ток будет течь обратно в источник питания. В настоящее время изучается регенеративное торможение в электромобилях и других приложениях, требующих максимальной эффективности. Этот метод не только обеспечивает управление двигателем постоянного тока, но также обеспечивает разумный способ снижения энергопотребления.
Регулятор скорости: широтно-импульсная модуляция (ШИМ)
PWM может использоваться во многих типах двигателей, как показано в нашей статье о контроллерах двигателей переменного тока. По сути, схемы ШИМ изменяют скорость двигателя, моделируя уменьшение / увеличение напряжения питания. Контроллеры привода с регулируемой скоростью отправляют на двигатель периодические импульсы, которые в сочетании с эффектом сглаживания, вызванным индуктивностью катушки, заставляют двигатель работать так, как будто он питается от более низкого / более высокого напряжения. Например, если на двигатель 12 В подается сигнал ШИМ, высокий (12 В) в течение двух третей каждого периода и низкий (0 В) в остальное время, двигатель будет эффективно работать при двух третях полного напряжения, или 8 В.Следовательно, процент снижения напряжения или «рабочий цикл» ШИМ изменяет скорость двигателя. ШИМ легко и недорого реализовать, и можно выбрать практически любой рабочий цикл, что позволяет практически непрерывно контролировать скорость двигателя. ШИМ часто сочетается с Н-мостами, чтобы обеспечить управление скоростью, направлением и торможением.
Контроллер якоря: переменное сопротивление
Другой способ повлиять на скорость двигателя постоянного тока – это изменить ток, протекающий через катушку возбуждения или через якорь.Скорость выходного вала изменится при изменении тока через эти катушки, так как его скорость пропорциональна силе магнитного поля якоря (продиктованного током). Переменные резисторы или реостаты, включенные последовательно с этими катушками, могут использоваться для изменения тока и, следовательно, скорости. Пользователи могут увеличивать сопротивление катушки якоря, чтобы уменьшить скорость, или увеличивать сопротивление статора, чтобы увеличить его, и все это путем регулирования сопротивления. Обратите внимание, что этот метод приводит к неэффективности двигателя, поскольку увеличение сопротивления означает потерю большего количества энергии на тепло, и именно поэтому ШИМ является предпочтительным типом контроллера двигателя постоянного тока.
Заявки и критерии выбора
При рассмотрении вопроса о покупке контроллера двигателя постоянного тока есть несколько ключевых вопросов, на которые следует ответить либо вашему исследованию, либо поставщику. Контроллеры двигателей постоянного тока может быть сложно указать из-за их разнообразия, поэтому список вопросов ниже будет надежным инструментом при выборе контроллера для вашего проекта. Обязательно найдите самую последнюю информацию о новейших доступных технологиях, связавшись с вашим поставщиком, и используйте эти вопросы, чтобы сделать осознанный выбор:
- Каков номинальный диапазон напряжения используемого двигателя и какие части этого диапазона он будет использовать?
- Какой тип управления желателен (скорость, крутящий момент, направление или все три)?
- Какой тип двигателя контролируется?
- Какой длительный ток может подавать контроллер, и соответствует ли он длительному потреблению тока двигателем под нагрузкой?
- Имеется ли в системе встроенная максимальная токовая / тепловая защита?
- Какой будет метод управления при использовании микропроцессорных приводов (ШИМ, ПДУ, аналоговое напряжение и т. Д.))? Программное обеспечение необходимо?
- Вам нужен контроллер с двумя двигателями (один контроллер для двух независимых двигателей)?
Контроллеров двигателей постоянного тока доступно столько же, сколько самих двигателей постоянного тока; их изменчивость – одно из их сильнейших преимуществ. Их приложения также многочисленны, поскольку большинство разработчиков извлекают выгоду из какого-либо пользовательского ввода в их двигатель постоянного тока. В сферах робототехники, производства, военных приложений, автомобилей и многих других используются контроллеры двигателей постоянного тока с отличными результатами.В зависимости от того, как они используются, контроллеры двигателей постоянного тока могут предоставить простые средства управления с хорошей точностью по приемлемой цене.
Сводка
В этой статье представлено понимание того, что такое контроллеры двигателей постоянного тока и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- http: // srjcstaff.santarosa.edu/~lwillia2/2B/2Bch30.pdf
- https://itp.nyu.edu/physcomp/lessons/dc-motors/dc-motors-the-basics/
- https://www.ece.uvic.ca
- https://www.tigoe.com/pcomp/code/circuits/motors/controlling-dc-motors/
- https://www.elprocus.com/what-are-the-best-ways-to-control-the-speed-of-dc-motor/
- https://www.robotshop.com/community/tutorials/show/how-to-make-a-robot-lesson-5-choosing-a-motor-controller
Прочие изделия для двигателей
Больше от Instruments & Controls
Произошла ошибка
Повторите попытку позже или попробуйте нашу домашнюю страницу еще раз.
Bitte versuchen Sie es später oder schauen Sie ob die Homepage funktioniert.
Ошибка: E1020
Австралия Электронная почта
Максон Мотор Австралия Пти Лтд
Unit 1, 12-14 Beaumont Road
Гора Куринг-Гай Новый Южный Уэльс 2080
Австралия
Benelux Электронная почта
maxon motor benelux B.V.
Йосинк Колквег 38
7545 PR Enschede
Нидерланды
Китай Электронная почта
Максон Мотор (Сучжоу) Ко., Лтд
江兴东 路 1128 号 1 号楼 5 楼
215200 江苏 吴江
中
Германия Электронная почта
максон мотор гмбх
Truderinger Str. 210
81825 München
Deutschland
Индия Электронная почта
maxon precision motor India Pvt.ООО
Niran Arcade, № 563/564
Новая Бел Роад,
RMV 2-я ступень
Бангалор – 560 094
Индия
Италия Электронная почта
maxon motor italia S.r.l.
Società Unipersonale
Via Sirtori 35
20017 Rho MI
Италия
Япония Электронная почта
マ ク ソ ン ジ ャ パ ン 株式会社
東京 都 新宿 区 新宿 5-1-15
〒 160-0022
日本
Корея Электронная почта
㈜ 맥슨 모터 코리아
서울시 서초구
반포 대로 14 길 27, 한국 137-876
Португалия Электронная почта
maxon motor ibérica s.а
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Швейцария Электронная почта
максон мотор аг
Брюнигштрассе 220
Постфах 263
6072 Sachseln
Schweiz
Испания Электронная почта
maxon motor ibérica s.a. Испания (Барселона)
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Тайвань Электронная почта
maxon motor Тайвань
8F.-8 №16, переулок 609 сек. 5
П. 5, Chongxin Rd.
Sanchong Dist.
Нью-Тайбэй 241
臺灣
Великобритания, Ирландия Электронная почта
максон мотор великобритания, лтд
Maxon House, Hogwood Lane
Finchampstead
Беркшир, RG40 4QW
Соединенное Королевство
США (Восточное побережье) Электронная почта
прецизионные двигатели maxon, inc.
