
Сервосила: Сервоприводы для мобильной робототехники
Сервоприводы Сервосила
Сервоприводы Сервовосила специально разработаны для применения в мобильных роботах, а это накладывает особые требования к конструкции сервоприводов:
- Малая масса сервоприводов. Малая масса важна для снижения переносимой массы робота, снижения энергопотребления, а также для уменьшения кинетической энергии манипуляторов типа “рука”, которые могут наносить травмы ударами при движении.
- Сервоприводы являются интеллектуальными и управляются по шине CAN или ШИМ, с отправкой обратно информации о текущем состоянии привода.
- Приводы имеют полые валы для пропуска кабелей или разъемы для сквозной проводки кабелей питания и кабелей информационных шин внутри руки. Скрытые внутри руки кабели хорошо защищены от повреждения при работе.
- Приводы герметичны, пыле- и водостойкие (класс IP68), работают при расширенном диапазоне температур вне помещений
- Через полые валы приводов можно проводить кабели, не относящиеся непосредственно к питанию или управлению сервоприводами.
 Например, если на конце манипулятора типа “рука” установлен дополнительный модуль целевой нагрузки, то через цепочку сервоприводов в руке можно протянуть кабели, необходимые этому модулю.
Например, если на конце манипулятора типа “рука” установлен дополнительный модуль целевой нагрузки, то через цепочку сервоприводов в руке можно протянуть кабели, необходимые этому модулю.
Интеллектуальные сервоприводы
В основе конструкции сервоприводов Сервосила лежат малогабаритные бесколлекторные двигатели, управляемые микропроцессорными контроллерами согласно векторному закону управления. Волновые редукторы обеспечивают минимальный люфт выходного вала, а также малые габариты и массу.Программное обеспечение микропроцессорного контроллера, встроенного в каждый из приводов обеспечивает управление приводом в режимах «по положению вала», «по скорости» и «по моменту». Регулирование основано на ПИД регуляторах, реализованных в программном обеспечении микропроцессорного контроллера привода.
Сервоприводы получают команды от бортового компьютера мобильного робота по шине CANbus и отсылают телеметрию обратно в бортовой компьютер.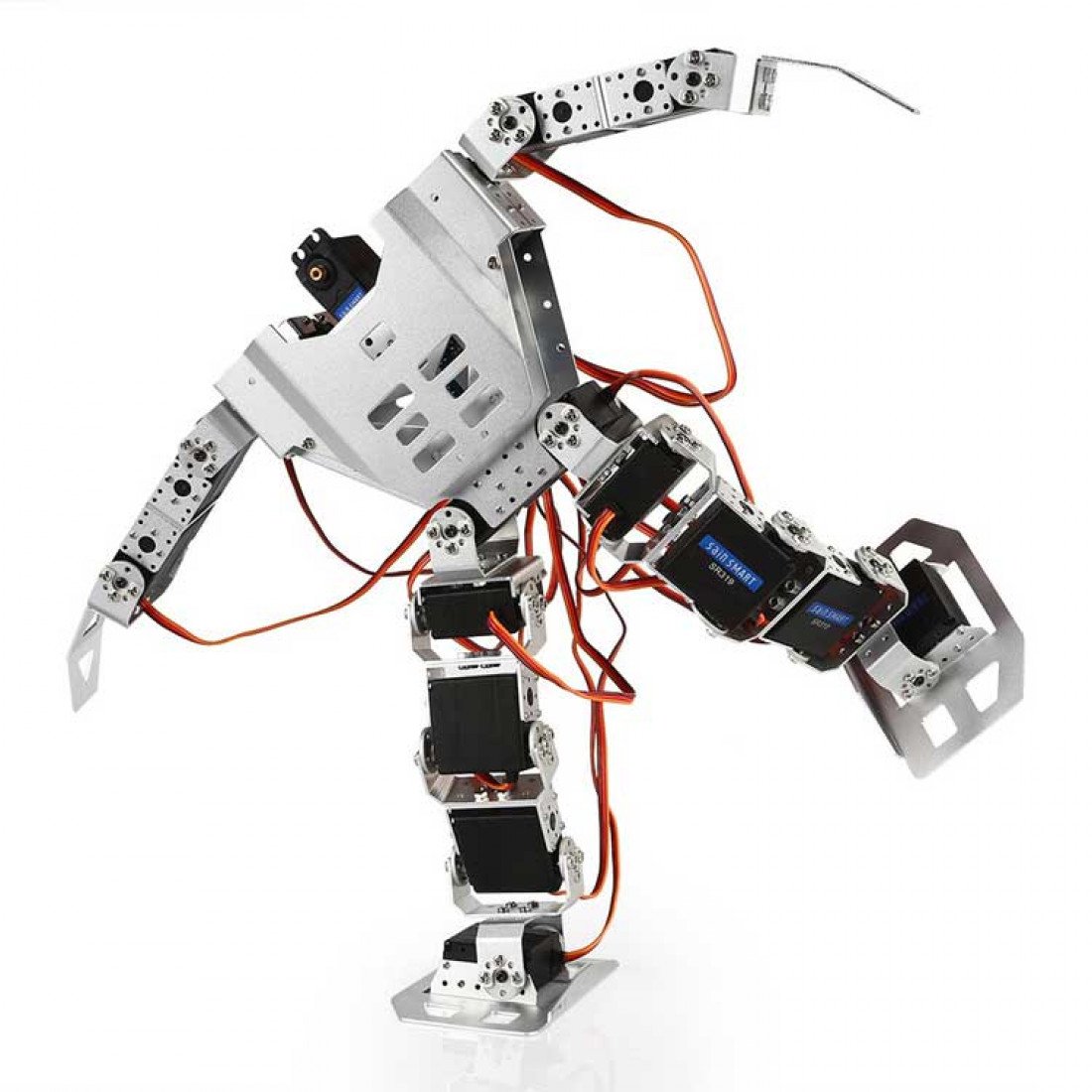
Описание
Компоновка сервоприводов оптимизирована для применения в робототехнических комплексах различного назначения.
Наличие полого вала обеспечивает возможность проводки любых кабелей через ось двигателя или сквозная проводка через центральный разъём, проводку кабелей шины питания и управления CAN через вращающийся вал и надежную защиту кабелей от механических повреждений.
Малый вес при большом крутящем моменте: конструкция оптимизирована для мобильных роботов.
Стандартный CANbus интерфейс и встроенный блок управления на основе микроконтроллера обеспечивают простое сопряжение с бортовыми компьютерами мобильных роботов.
Сервоприводы спроектированы для работы в широком диапазоне температур в полевых условиях, вне помещений, под дождем, в грязи, в снегу. Единый пыле- и водонепроницаемый разъем для шины питания и управления обеспечивает возможность работы в широком диапазоне внешних условий.
Возможность соединения до 15 приводов в цепочку. Интегрированный блок питания обеспечивает возможность перекомпоновки роботов в полевых условиях.
Характеристики
| Сервопривод 35Нм | Сервопривод 56Нм | Сервопривод 64Нм | |
| Крутящий момент, Нм | 35.0 | 56.0 | 64.0 |
| Масса, кг | 1.0 | 1.0 | 1.25 |
| Габаритные размеры, мм | |||
| CAD модель (файл *.STEP) | скачать | скачать | |
| Сквозная проводка | Через сквозные разъёмы | Через сквозные разъёмы | Через сквозные разъёмы |
| Время поворота вала на 90°, сек | 4. 2 2 | 6.0 | 9.0 |
| Угловая точность, градусы | ± 0.2 (более высокая точность – по запросу) | ± 0.2 (более высокая точность – по запросу) | ± 0.2 (более высокая точность – по запросу) |
| Входное напряжение, VDC | 18-36 | 18-36 | 18-36 |
| Номинальное напряжение, VDC | 24 | 24 | 24 |
| Средняя потребляемая мощность, Вт | 32 | 32 | 32 |
| Макс.количество приводов, соединенных в цепочку, шт | 15 | 15 | 15 |
| Интерфейс управления | CAN (RS232 или ШИМ опционально) | ||
| Степень защиты по классификации IP | IP68 (пыленепроницаемость, водонепроницаемость) | ||
| Рабочая температура, °С | -20…+65 | ||
Интерфейс управления по сети CANbus
Your browser does not support the video playback. Please visit our YouTube channel to watch the video.
Please visit our YouTube channel to watch the video.
Купить сервопривод
Стабильный робот кронштейна сервопривода с качественным звуком
Купите технологию нового поколения робот кронштейна сервопривода, которая сейчас доступна на Alibaba.com. Эти широко совместимые электронные устройства удовлетворят различные потребности клиентов. Эти уникальные робот кронштейна сервопривода имеют регулировку громкости, необходимую для различных случаев. Поскольку это электронное устройство широко применяется, покупатель может использовать его по своему усмотрению.
Максимальная защита гарантируется с помощью защиты по току, защиты от короткого замыкания и защиты от перенапряжения, установленных в этих устройствах. Эти мультибезопасные методы работают, чтобы уменьшить потерю этих высококачественных робот кронштейна сервопривода. Эти электронные устройства легкие и имеют интеллектуальный контроль температуры, который отлично подходит для отвода тепла благодаря высококачественному подшипнику, который отводит тепло. Это необходимо для надлежащих тепловых характеристик этих электронных устройств.
Это необходимо для надлежащих тепловых характеристик этих электронных устройств.
Это качество робот кронштейна сервопривода обеспечивает стабильную передачу благодаря встроенной усовершенствованной системе модуляции, которая обеспечивает качественный вывод звука , и они доступны на Alibaba.com. Статическая компенсация в этих электронных устройствах дает им чистый звук при прослушивании. Эти устройства мирового класса просты в использовании, поскольку они отображают сигнал передачи и другие необходимые команды с помощью светового дисплея. Эти огни также важны для видимости покупателя, особенно при использовании устройства в ночное время.
Чтобы узнать о самых удивительных робот кронштейна сервопривода на рынке, посетите Alibaba.com. Проверенные производители и поставщики на этом сайте всегда в курсе самых выгодных предложений по всему миру, сохраняя при этом высокое качество. Чтобы получить наилучший звук на рынке, посетите этот интернет-магазин.
ШАГАЮЩИЙ РОБОТ С СЕРВОПРИВОДАМИ
 Пульт сделан на PIC16F873A, blutooth модуль готовый, модели HC-05. Аккумулятор для пульта взял от мобильного телефона, на 4,2 В. Время потраченное на создание этого шагающего робота около 1,5 месяца, от задумки до результата.
Пульт сделан на PIC16F873A, blutooth модуль готовый, модели HC-05. Аккумулятор для пульта взял от мобильного телефона, на 4,2 В. Время потраченное на создание этого шагающего робота около 1,5 месяца, от задумки до результата.Фото готового робота
Видео работы гексапода
Передние светодиодные глаза выполнены на обычных LED элементах, гнездо в передней части – для красоты. Другие подробности можете узнать на форуме. Автор проекта – ukrnano.
Форум по роботам на МК
Форум по обсуждению материала ШАГАЮЩИЙ РОБОТ С СЕРВОПРИВОДАМИ
| |||

Сервопривод робота – Энциклопедия по машиностроению XXL
Работа сервопривода робота основана на использовании информации о скорости. Из известных методов измерения скорости, полу чивших широкое распространение (применение тахогенератор а пре образование выходного сигнала с датчика в скорость с помощью преобразователя частота — напряжение дифференцирование сигнала положения), ни один не применим для получения прецизионного сигнала скорости. Действительно, тахогенератор должен быть установлен на одной оси с двигателем, что приводит к увеличению размеров и снижает техническую эффективность малого робота преобразователь частота — напряжение не позволяет обнаружить изменения скорости в случае возрастания колебательности при снижении скорости использование информации о положении осложняется ее чувствительностью к шумам. Поэтому в данном случае наиболее приемлем идентификатор (рис.Сервопривод робота 125 Системы координат робота [c.263]
Поэтому при построении математической модели механической системы ПР целесообразно на основании экспериментальной информации о формах колебаний конструкции выбрать структуру системы дифференциальных уравнений, а значения параметров системы определить в соответствии с данными о значениях собственных частот. Методику составления математической модели механической системы промышленного робота рассмотрим на примере робота-манипулятора со складывающейся рукой, имеющего позиционную аналоговую систему управления с гидравлическим сервоприводом.
В простейшем случае параметрической адаптации стабилизирующие законы управления приводами манипулятора дополняются алгоритмами самонастройки, обеспечивающими автоматическое приспособление системы управления к изменению параметров (например, к изменению массо-инерционных характеристик груза). Для придания роботу способности к параметрической адаптации достаточно заменить его сервоприводы на самонастраивающиеся приводы. Отличительной чертой последних является нечувствительность (инвариантность) по отношению к параметрическим возмущениям.
[c.137]
Для придания роботу способности к параметрической адаптации достаточно заменить его сервоприводы на самонастраивающиеся приводы. Отличительной чертой последних является нечувствительность (инвариантность) по отношению к параметрическим возмущениям.
[c.137]
Более эффективным способом управления манипуляционными роботами является сервоуправление по программе. В его основе лежит идея отработки ПД с помощью сервоприводов, использующих обратную связь по фактическому состоянию манипулятора. При этом коэффициенты усиления в каналах обратной связи заранее рассчитываются так, чтобы обеспечить воспроизведение ПД с заданной точностью при наличии небольших начальных и параметрических возмущений. [c.161]
В современных промышленных роботах сервоуправление по программе обычно реализуется с помощью серийно выпускаемых сервоприводов с локальными обратными связями по положению и скорости. Двигательная система таких роботов представляет собой манипулятор с гп обобщенными координатами q ,. .., Qm, по каждой из которых действует свой сервопривод. Задача /-го сервопривода заключается в том, чтобы, используя обратную связь по qi (t), (t), обеспечить отработку программной уставки (i) с заданной точностью.
[c.161]
.., Qm, по каждой из которых действует свой сервопривод. Задача /-го сервопривода заключается в том, чтобы, используя обратную связь по qi (t), (t), обеспечить отработку программной уставки (i) с заданной точностью.
[c.161]
Поскольку исполнительный механизм (манипулятор) вместе с грузом является общей нагрузкой по отношению ко всем сервоприводам, двигательную систему робота следует рассматривать как многосвязную систему с перекрестными связями. Такая система включает т взаимосвязанных подсистем. На вход г-й подсистемы подается i-я компонента ПД (t), а выходом служит реальное значение обобщенной координаты qi (t). Взаимодействие подсистем происходит по каналам перекрестных связей. [c.161]
В практике проектирования сервоприводов для промышленных роботов широко применяется упрощенный метод расчета, основанный на выделении отдельных подсистем без учета явлений динамического взаимодействия [7, 16, 701.
 Такой подход позволяет расчленить многосвязную систему, движения которой в общем случае описываются нелинейными дифференциальными уравнениями высокого порядка вида (5.38), на т сравнительно простых локальных систем.
[c.161]
Такой подход позволяет расчленить многосвязную систему, движения которой в общем случае описываются нелинейными дифференциальными уравнениями высокого порядка вида (5.38), на т сравнительно простых локальных систем.
[c.161]Описанный приближенный метод расчета сервоприводов для промышленных роботов, несмотря на отсутствие строгого обоснования, на практике зачастую обеспечивает требуемую точность отработки ПД и приемлемое качество управления. Поэтому он используется при проектировании многих промышленных роботов с позиционными и контурными системами управления. [c.161]
На рис. 5.14 представлена структурная схема сервоуправления по программе с помощью сервоприводов, приводящих в движение исполнительный механизм робота. Здесь приняты следующие сокращения [c.162]
Информационная система размещена непосредственно на роботе. Трасса движения задается с помощью светоотражающей полосы. Для наведения на трассу используются фотодатчики. Сигналы обратной связи от этих датчиков поступают в сервоприводы ведущих колес, обеспечивающих перемещение робота вдоль трассы-полосы. Бортовая система адаптивного управления реализована на базе микроЭВМ Электроника-60 . Элементы интеллекта робота закладываются в программное обеспечение. Система управления робота имеет иерархическую структуру, включающую следующие программно-аппаратные модули
[c.214]
Сигналы обратной связи от этих датчиков поступают в сервоприводы ведущих колес, обеспечивающих перемещение робота вдоль трассы-полосы. Бортовая система адаптивного управления реализована на базе микроЭВМ Электроника-60 . Элементы интеллекта робота закладываются в программное обеспечение. Система управления робота имеет иерархическую структуру, включающую следующие программно-аппаратные модули
[c.214]
На рис. 1 представлена схема, характерная для большинства промышленных роботов. Робот состоит из исполнительной части (ИЧ), системы датчиков положения звеньев (ЦП) и вычислительной машины (ВМ), включающей в себя запоминающее устройство (ЗУ), управляющее устройство (УУ) и преобразователи аналог—код (АК) VL код—аналог (КЛ), Исполнительная часть робота состоит из манипулятора (руки с захватами) и системы сервоприводов (для неподвижных роботов). У подвижных роботов в исполнительную часть входит также механизм перемещения самого робота. [c.429]
Робот имеет напольное и подвесное исполнение, щесть степеней подвижности, сервопривод постоянного тока.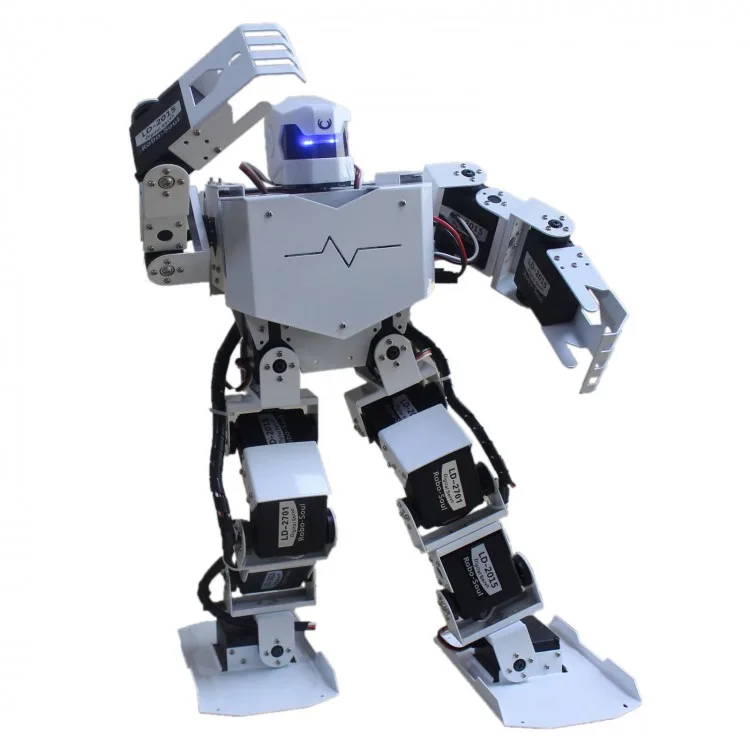 [c.472]
[c.472]
Современные изделия целесообразно разрабатывать целыми гаммами, группами (например, гамма многоцелевых станков для изготовления деталей различных габаритных размеров или гамма роботов, гамма сервоприводов разной мощности и т.п.). При едином конструктивном подходе создаются благоприятные условия для унификации и стандартизации элементов конструкции, а, следовательно, и условия для их автоматической сборки. [c.47]
На самом деле рассмотренный выше цикловой робот также предполагался обученным, хотя это выглядело не столь явно процесс обучения циклового робота состоит в настройке фиксаторов, ограничивающих движения манипулятора по каждой из степеней подвижности, однако ввиду относительной простоты этой операции ее часто упускают из вида. Тогда, если учесть это обстоятельство, исчезает разница между цикловым манипулятором и манипулятором с сервоприводом ее не существует для уровня логического управления, который рассматривает тот и другой манипулятор как конечный автомат.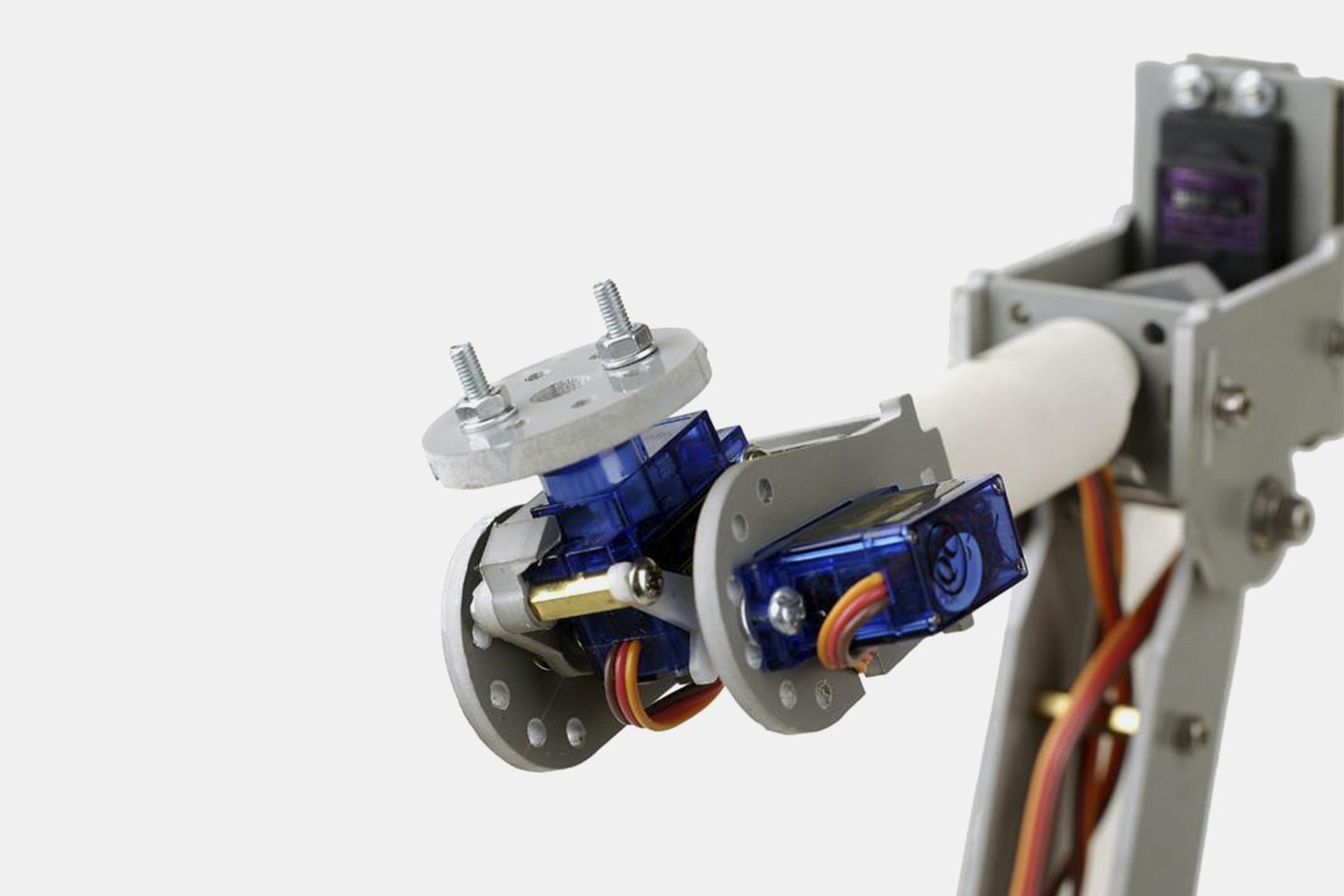 [c.151]
[c.151]
В манипуляторах с автоматическим управлением звенья исполнительного механизма получают движения от сервоприводов, работающих по заданной программе подобно станкам с програм-ным управлением. Управляющий механизм служит в этом случае только для выработки программы работы исполнительного механизма. Все действия оператора, связанные с перемещением звеньев управляющего механизма, преобразуются посредством датчиков перемещений в электрические или механические сигналы и записываются на магнитную ленту или перфоленту. Полученная программа может многократно использоваться для управления манипуляторо.м. Манипуляторы с автоматическим управлением могут использоваться не только для работы во вредных условиях, но и для механизации однообразных и утомительных операций при обработке и сборке изделий. В этих случаях манипуляторы с автоматическим управ-, лением называют промышленными роботами (см. 32). [c.263]
Робот I типа включает в себя манипулятор, состоящий из стойки и консольной руки, позиционер (манипулятор изделия) с планшайбой, на которой крепится сварочный кондуктор, блок управления, пульт дистанционного управления, устройство стыковки.
 Робот имеет пять степеней подвижности перемещение стола по осям X и Y, перемещение руки по оси Z, поворот планшайбы стола по оси а, поворот горелки по оси ф. Он обеспечивает 16 значений линейных скоростей в пределах 3—16 (через 1 мм/с), 20 и 75 мм/с. Угловая скорость по оси ф постоянна и равна 0,487 рад/с (28 град/с). Сервопривод — электродвигатели постоянного тока, система программного управления — контурная. Микропроцессор управления роботом позволяет выполнять разные функции интерполяции (дуговая и прямолинейная) и обеспечить легкость обучения робота. Память системы построена на интегральных схемах, емкость памяти 470 точек, способ регулирования — от точки к точке. Робот предназначен для электродуговой сваркп в среде СО2 сложных ферменных конструкций массой не более 150 кг, включая массу сварочного кондуктора. Точность позиционирования + 0,5 мм.
[c.82]
Робот имеет пять степеней подвижности перемещение стола по осям X и Y, перемещение руки по оси Z, поворот планшайбы стола по оси а, поворот горелки по оси ф. Он обеспечивает 16 значений линейных скоростей в пределах 3—16 (через 1 мм/с), 20 и 75 мм/с. Угловая скорость по оси ф постоянна и равна 0,487 рад/с (28 град/с). Сервопривод — электродвигатели постоянного тока, система программного управления — контурная. Микропроцессор управления роботом позволяет выполнять разные функции интерполяции (дуговая и прямолинейная) и обеспечить легкость обучения робота. Память системы построена на интегральных схемах, емкость памяти 470 точек, способ регулирования — от точки к точке. Робот предназначен для электродуговой сваркп в среде СО2 сложных ферменных конструкций массой не более 150 кг, включая массу сварочного кондуктора. Точность позиционирования + 0,5 мм.
[c.82]На сгшом деле нет четкой границы между перечисленными выше тремя поколениями роботов даже программный робот, снабженный манипулятором с сервоприводами, является адаптивным в том смысле, что его система управления приводами, построенная по принципу обратной связи, способна парировать некоторые возмущения, возникающие в процессе движения исполнительного механизма (например, переменные моменты инерции звеньев, различные массы грузов в захвате и т. д.), при этом такая компонента адаптивного робота, как система очувствления, представлена здесь датчиками положения (и, возможно, скорости), установленными в подвижных сочленениях. Ясно, что в этом случае реализуется адаптация самого низкого уровня.
[c.10]
д.), при этом такая компонента адаптивного робота, как система очувствления, представлена здесь датчиками положения (и, возможно, скорости), установленными в подвижных сочленениях. Ясно, что в этом случае реализуется адаптация самого низкого уровня.
[c.10]
Манипулятор адаптивного робота чаще всего представляет собой сложный многозвенный механизм с антропоморфной кинематикой. Так, в состав одного из наиболее распространенных в настоящее время промышленных роботов Puma фирмы Юним.ейшн (США) входит 6- или 5-степенной антропоморфный манипулятор, оснащенный электромеханическими сервоприводами. Каждая степень подвижности управляется двигателем постоянного тока, оснащена потенциометрами обратной связи и кодовыми датчиками. Манипулятор имеет грузоподъемность 1—10 кг (в зависимости от модели), повторяемость +0,1 мм и максимальную скорость перемещения захвата 1 м/с. Робот может быть использован на операциях сборки, дуговой [c.11]
Как говорилось выше, исполнительный механизм адаптивного робота — это чаще всего манипулятор, снабженный сервоприводами. Это вполне естественно, поскольку адаптивные свойства робота, как правило, проявляются в коррекции двилieния манипулятора в соответствии с показаниями системы очувствления. Однако иногда в состав адаптивного робота могут входить н цикловые манипуляторы, причем адаптация в этом случае заключается в смене последовательности обхода наперед известных точек позиционирования.
[c.12]
Это вполне естественно, поскольку адаптивные свойства робота, как правило, проявляются в коррекции двилieния манипулятора в соответствии с показаниями системы очувствления. Однако иногда в состав адаптивного робота могут входить н цикловые манипуляторы, причем адаптация в этом случае заключается в смене последовательности обхода наперед известных точек позиционирования.
[c.12]
TA0262 Arduino Robot ARM 4 DOF Mechanical Claw Kit Manual
Робот Arduino ARM 4
Обзор
В этой инструкции мы познакомим вас с забавным проектом Arduino Robot Arm 4DOF Mechanical Claw Kit. Этот набор роботов Bluetooth DIY на базе Arduino UNO основан на плате разработки Arduino Uno. Этот очень простой и легкий в сборке комплект – идеальный проект Arduino для начинающих и отличная платформа для обучения робототехнике и инженерии.
Робот-манипулятор поставляется в плоском корпусе для сборки и требует минимальной пайки для запуска и работы. Интегрирует 4 сервопривода SG90, которые допускают движение на 4 градуса и могут захватывать легкие предметы когтями. Управление рычагом может осуществляться с помощью 4 потенциометров. Давайте начнем!
Управление рычагом может осуществляться с помощью 4 потенциометров. Давайте начнем!
Начало работы: Arduino Robot Arm 4dof Mechanical Claw Kit
Что такое Ардуино?
Arduino – это электронная платформа с открытым исходным кодом, основанная на простом в использовании аппаратном и программном обеспечении. Платы Arduino могут считывать входные данные – свет на датчике, палец на кнопке или сообщение Twitter – и превращать его в выход – активировать двигатель, включать светодиод, публиковать что-то в Интернете. Вы можете указать своей плате, что делать, отправив набор инструкций микроконтроллеру на плате. Для этого вы используете язык программирования Arduino (на основе проводки) и программное обеспечение Arduino (IDE), основанное на обработке.
Что такое IDUINO UNO?
IDuino Uno находится на ATmega328. Он имеет 14 цифровых входов / выходов (из которых 6 могут использоваться как выходы ШИМ), 6 аналоговых входов, керамический резонатор на 16 МГц, соединение USB, разъем питания, разъем ICSP и кнопку сброса. Он содержит все необходимое для поддержки микроконтроллера; просто подключите его к компьютеру с помощью кабеля USB или включите адаптер переменного тока в постоянный или аккумулятор, чтобы начать работу.
Он содержит все необходимое для поддержки микроконтроллера; просто подключите его к компьютеру с помощью кабеля USB или включите адаптер переменного тока в постоянный или аккумулятор, чтобы начать работу.
Установка программного обеспечения
В этом разделе мы познакомим вас с платформой разработки, где вы переводите творческий ум в коды и позволяете ему летать.
Программное обеспечение Arduino / IDE
Откройте приложение для Windows, дважды щелкнув его, и следуйте инструкциям для завершения (не забудьте установить все драйверы для Arduino). Легкий!
Рисунок 1 Установка драйверов
Подключение платы UNO к компьютеру
Подключите UNO к компьютеру с помощью синего USB-кабеля, и при правильном подключении вы увидите, что загорится зеленый светодиодный индикатор питания, а другой оранжевый светодиод будет мигать.
Рисунок 2 Проверьте свой специальный COM-порт и запишите его номер
Найдите свой серийный номер COM и запишите его.
Нам нужно выяснить, по какому каналу COM в настоящее время обменивается данными между ПК и UNO. По пути: Панель управления | Оборудование и звук | Устройства и принтеры | Диспетчер устройств | Порты (COM и LPT) | Arduino UNO (COMx)
Запишите номер COM, так как он нам понадобится позже. Поскольку COM-порт может время от времени меняться, этот шаг очень важен. В этом случае в демонстрационных целях мы используем COM 4.
Поиграйте со своим первым светодиодным «Hello World» example
Во-первых, давайте сообщим IDE, где найти наш порт Arduino и какую плату вы сейчас используете: Следующая инструкция (рис. 3 и 4) показывает подробности:
Конфигурация портов
Конфигурация платы
Пришло время поиграть с тобой в первую простую бывшуюampле Следуя по пути File | Бывшийamples | 01. Основы | Моргай. Появится новое окно кода, нажмите на стрелку, чтобы загрузить. Вы заметите, что оранжевый светодиод мигает почти каждую секунду.
Установка оборудования
| |
В упаковке-стойке слева направо:
|
 Решение по питанию)
Решение по питанию)Схема пайки
Этот комплект робота-манипулятора требует минимальной пайки, чтобы все работало и работало. Плата расширения руки робота используется для подключения интерфейса между контроллером, в этом проекте, четырьмя потенциометрами и платой Iduino UNO.
Предупреждение: Будьте осторожны при использовании горячего паяльника.
Рисунок 3 Базовая иллюстрация платы ARM робота.
Подготовить:
- Плата расширения одной руки робота
- Один черный разъем питания 12 В
- Заголовки контактов 52P
- Один синий интерфейс внешнего источника питания
- Один черный интерфейс Bluetooth
Затем припаяйте контакты для сервоприводов и разъема питания.
Имейте в виду, что контакты для сервоинтерфейса обращены вверх, а для интерфейса Iduino – вниз.
Затем припаиваем четыре потенциометра.
Крышка перемычки используется для ярлыка платы расширения руки робота и платы Iduino UNO, что означает, что вам не нужно отдельно запитывать плату Iduino UNO.
Вставьте перемычку, так как мы используем один внешний источник питания, аккумуляторный блок на 12 В.
Затем наденьте четыре серебряных крышки на обнаженные потенциометры. Теперь вы завершили пайку!
Отладка программного обеспечения
Загрузка кода Arduino UNO
Робот будет действовать так, как он запрограммирован. Понимание и усвоение того, что находится внутри платы Iduino UNO, т.е. программного кода, является важной частью процесса обучения. В этом разделе наша конечная цель – убедиться, что сервоприводы и потенциометры работают нормально.
Если это ваш первый проект Arduino, внимательно следуйте инструкциям. Во-первых, загрузите соответствующие коды с нашего webсайт.
- Дважды щелкните значок, чтобы открыть программу, и откройте file в пути: File | Открытым
- Откройте me_arm3.0 Arduino file
Отладка программного обеспечения
Нажмите кнопку загрузки со стрелкой вправо на панели инструментов, чтобы загрузить свой file в ООН
Статус загрузки завершен, если нет, проверьте плату и порты в Раздел 3.2, чтобы убедиться, что вы правильно подключаете UNO
Отладка сервопривода
Затем давайте проверим наши сервоприводы, чтобы убедиться, что они работают плавно. Сервоприводы должны вращаться плавно, когда вы играете с соответствующими потенциометрами. Если нет, убедитесь, что вы правильно загрузили свой код с помощью знака «Готово загрузка», описанного выше, и плотно вставьте сервоплату в плату UNO, чтобы каждый из контактов был правильно выровнен. Самое главное, правильно подключите надежный блок питания, где инструкции по блоку питания будут проиллюстрированы в следующей части. Внимательно прочтите его, иначе вы можете сжечь свой микроконтроллер ядра Arduino.
Внимательно прочтите его, иначе вы можете сжечь свой микроконтроллер ядра Arduino.
Сервопривод имеет три контакта:
Угол поворота регулируется скважностью сигнала ШИМ (широтно-импульсной модуляции). Частота ШИМ обычно находится в диапазоне от 30 до 60 Гц – это так называемая частота обновления. Если эта частота обновления слишком мала, тогда точность сервопривода снижается, поскольку он начинает периодически терять свое положение, если частота слишком высока, тогда сервопривод может начать дребезжать. Важно выбрать оптимальную скорость, чтобы серводвигатель мог зафиксировать свое положение.
Убедитесь, что каждый сервопривод работает хорошо, так как их трудно удалить..
Подключите сервоинтерфейс к серво-разъему UNO по одному, от слота 4 к слоту 1, которые контролируются соответствующим потенциометром.
Подключите блок питания 9-12 В 2A к разъему питания Arduino с перемычкой (сервоплата) на
Источник питания
Электроэнергия играет жизненно важную роль в работе системы робота-манипулятора, поскольку недостаток питания может привести к дрожанию сервоуправляющего механизма, и программа будет работать ненормально. Потребуются два независимых источника питания: один для управления макетной платой Uno, а другой – для сервоконтроллеров потенциометров. В этом разделе для вашего удобства мы представим вам несколько альтернативных источников питания:
Потребуются два независимых источника питания: один для управления макетной платой Uno, а другой – для сервоконтроллеров потенциометров. В этом разделе для вашего удобства мы представим вам несколько альтернативных источников питания:
- (Рекомендуется) Используйте адаптер питания 5 В, 2 А и подключите его к разъему постоянного тока 2.1 мм на плате потенциометра.
- (В качестве альтернативы) используйте источник питания 5 В 2 А и подключите его к синей клеммной колодке на плате потенциометра.
- (Рекомендуется) Используйте адаптер питания от 9 до 12 В для платы разработки Arduino UNO через гнездо постоянного тока 2.1 мм на плате Uno.
- (В качестве альтернативы) используйте входящий в комплект кабель USB A – B (кабель принтера), чтобы обеспечить стабильный вход питания 5 В на плату Uno от зарядного устройства UB, ПК или ноутбука.
ПРИМЕЧАНИЕ: При внесении изменений в код на плате Uno, пожалуйста, убедитесь, что вы сняли плату сервоконтроллера руки робота с платы разработки Uno и отсоедините источник питания платы Uno. В противном случае это может привести к непоправимому повреждению вашего робота и ПК, так как через USB-порт может протекать большой ток.
В противном случае это может привести к непоправимому повреждению вашего робота и ПК, так как через USB-порт может протекать большой ток.
Отладка системы
Монтаж в стойку
В этом разделе мы проведем вас через установку робота-манипулятора и стойки.
- Снимите защитную бумагу с основания стойки.
Подготовьте предметы:
- Система исчисления
- 4 гайки M3
- 4 винта M3 * 30 мм
- Соберите детали, как показано слева.
Подготовьте предметы:
- 4 гайки M3
- 4 x M3 * 10 мм
- винты
- Затяните винты и гайки, как показано слева, которые используются для крепления нашей платы Iduino UNO.
Затем подготовьте предметы:
- 2x винта M3 * 8 мм
- Держатель сервопривода черный
- Стойка для сервопривода черного цвета
- Протяните резьбу кабеля через отверстие кронштейна сервопривода, как требуется для подключения к плате Iduino UNO, выполнив следующие действия.

Затем вставьте держатель кронштейна сервопривода в верхнюю часть держателя сервопривода. Теперь вы можете видеть, что сервопривод закреплен и зажат между держателем и кронштейном.
- Это должно выглядеть так
- Затем закрепите его, как показано слева.
- Это должно выглядеть так
Затем подготовьте предметы для сборки предплечья робота.
- 2 винта M3 * 8 мм
- Один кронштейн сервопривода
- Один сервопривод SG90
- Одна черная основа для основной руки
- Закрепите сервопривод с помощью кронштейна и основания таким же образом, как указано в последнем сервоприводе.
- Подготовьте предметы:
- 1 самонарезающий винт M2.5
- Один сервопривод
- Закрепите рог на черном акриле основного рычага с помощью самонарезающего винта M2.
 5.
5.
- Вставьте главный рычаг в сервопривод и поверните его по часовой стрелке, пока он не перестанет вращаться, поскольку он запрограммирован на вращение против часовой стрелки.
- Вытяните главный рычаг и верните его в горизонтальное положение, чтобы убедиться, что сервопривод повернет антиколот.kwise от этой самой точки (0 градусов) и не сломать руку при включении питания, чтобы вращать
- Возьмите саморез из упаковки стойки и закрепите, как показано слева.
- Соедините два активных соединения винтом, помните, что не затягивайте винты слишком сильно, так как они должны свободно вращаться.
- Подготовьте предметы:
- 2 x M3 * 10 мм
- Гайки м3
- Две черные вагонки из акрила
- Поместите два акрила Clapboard в соответствующий паз крыла.
- Сначала вставьте вагонку в соответствующие пазы, и на следующих этапах она будет закреплена одним винтом и гайкой с каждой стороны.

- Затем вставьте основание стойки в соответствующий паз между двумя вагонками.
- Это должно выглядеть так
- Закрепите обшивку на основании основного рычага одной парой винта и гайки.
Совет: Удерживая гайку в пазу, вверните M3.
- Закрепите вагонку с обеих сторон, как показано слева.
- Закрепите акрил позвоночника между предплечьем и основной рукой следующим образом:
- 2 x M3 * 10 мм
- два ореха
Совет: Удерживая гайку в пазу, вверните M3.
- Исправьте и другую сторону
- Затем подготовьте винт M3 * 6 мм и один акрил с длинной ручкой.
- Закрепите его в правом нижнем углу.
- Затем используйте другую длинную черную руку с тремя активными суставами, чтобы соединить два сустава предплечья.

- Затяните винты в правильной последовательности. Основа акрила в нижней части предплечья посередине, а другая лежит наверху.
- Подготовьте элементы для сборки правой боковой опоры:
- Два M3 * 8
- Одна черная круглая распорка
- Один черный опорный рычаг
- Один черный треугольный поддерживающий соединитель
- Закрепите первый винт, как показано слева. Круглая распорка находится посередине.
Пожалуйста, не затягивайте винты слишком сильно, так как есть активные соединения, так как они должны свободно вращаться, не теряя прилегающие акриловые материалы.
- Другой конец закрепите черным опорным кронштейном.
- Должно получиться вот так. Теперь у предплечья все еще есть три свободных конца, которые в конечном итоге соединяются для фиксации когтевой части.
- Подготовьте детали сервопривода когтя:
- Два квадратных кронштейна сервопривода
- 4 винта M3 * 8 мм
- Один сервопривод
- Два аксессуара для разъемов
- Поместите квадратный кронштейн внизу и вытяните кабели, как требуется для подключения к расширительной плате робота.

- Это должно выглядеть так
- Поместите прямоугольный кронштейн в верхнюю часть сервопривода и закрепите сервопривод четырьмя винтами M3 * 8 мм.
- Закрепите два зажима на прямоугольном кронштейне сервопривода двумя винтами M3 * 6 мм.
Не забудьте поставить одну черную круглую прокладку между ними, чтобы уменьшить трение.
- Затем соберите:
- 4 винта M3 * 8 мм
- Один короткий разъем
- Одна круглая распорка
- Закрепите его с левой стороны зажима, как показано слева.
Не забудьте поставить проставку между
- Подготовьте следующее подключить разъем коготь и треугольник поддержки:
- Два винта M3 * 8 мм
- Одна распорка
- Один опорный рычаг
- Закрепите опорный рычаг на треугольном соединителе.

- Затем можно закрепить всю часть когтя тремя свободно свисающими концами предплечья.
Не затягивайте винты активных соединений.
- Подготовьте самонарезающий винт в пакете сервопривода и рог сервопривода.
- Закрепите рог с помощью самонарезающего винта, как показано слева.
- Широко раскройте когти, а затем вставьте короткий рычаг, который мы создали на последнем этапе, и плотно прикрутите его.
- Закрепите плату Iduino UNO на базе
- Поместите плату расширения руки робота на верхнюю часть платы Iduino UNO.
Убедитесь, что контакты подключены правильно.
- Затем поместите систему робота-манипулятора на стойку сервопривода основания и закрепите ее на сервоприводе основания с помощью самонарезающего винта.
Теперь вы закончили установку!
Отладка стойки
Пришло время подключить сервоприводы к Arduino UNO.
Сервопривод 1 | Сервопривод когтя |
Сервопривод 2 | Главный сервопривод |
Сервопривод 3 | Сервопривод предплечья |
Сервопривод 4 | Сервопривод вращения |
Не торопитесь и выполните правильную проводку, следуя приведенным выше инструкциям.
Сервопривод имеет три контакта:
Общая отладка системы
Прежде чем мы включим питание, нам еще нужно проверить несколько вещей:
- Убедитесь, что каждое соединение может вращаться плавно, иначе в сервоприводе будет протекать большой ток, что приведет к «заблокированной» ситуации, и сервоприводы могут легко сгореть.

- Отрегулируйте потенциометр, чтобы он соответствовал удобному рабочему диапазону сервопривода. Сервопривод может работать под углом: 0 ~ 180 градусов без каких-либо ограничений, но для этого конкретного проекта сервопривод не может из-за механической конструкции. Таким образом, очень важно установить потенциометр в правильное положение. В противном случае, если любой из четырех сервоприводов застрянет, сервопривод будет истощать большой ток, который может вызвать непоправимый ущерб сервоприводам.
- Плавно и медленно меняйте потенциометр, так как сервоприводам требуется время для поворота.
- Варианты электропитания: обеспечивают постоянное и стабильное электропитание для работы сервоприводов
Веселитесь со своим ручным роботом
Ручное управление
Для ручного управления; с перемычкой, вставленной на плату расширения руки робота, вы можете управлять рукой робота, регулируя четыре потенциометра.
Интерфейс управления ПК
В этом разделе вы можете управлять своим роботом-манипулятором, подключив USB-порт к плате Iduino UNO Board.![]() При последовательной связи через USB-кабель команда отправляется из программного обеспечения верхнего уровня, которое на данный момент доступно только для пользователей Windows.
При последовательной связи через USB-кабель команда отправляется из программного обеспечения верхнего уровня, которое на данный момент доступно только для пользователей Windows.
Во-первых, скопируйте новый управляющий код программного обеспечения верхнего уровня на плату Arduino UNO.
Дважды щелкните
«Upper_Computer_Softwa re_Control.ino».
Затем нажмите кнопку загрузки.
Загрузите программное обеспечение с здесь: http://microbotlabs.com/ so ftware.html, кредит на microbotlab.com
- Откройте приложение и нажмите ОК, чтобы продолжить.
- Пожалуйста, подключите Arduino USB перед запуском программного обеспечения Mecon для автоматического определения портов или используйте кнопку «Сканировать порты», чтобы обновить доступные порты. Выберите порт USB.
- В этом случае для демонстрации мы используем COM6.
Этот номер COM может варьироваться от случая к случаю. Проверьте правильность номера COM-порта в диспетчере устройств.
Проверьте правильность номера COM-порта в диспетчере устройств.
- Управляйте рукой робота, сдвигая стержни сервопривода 1/2/3/4
Пришло время повеселиться! Включите питание и посмотрите, как работает ваш робот-манипулятор Arduino! После окончательной сборки и активации может потребоваться регулировка и отладка манипулятора робота. Робот будет действовать так, как он запрограммирован. Выяснение того, что делает код, – это часть процесса обучения. Откройте снова свою Arduino IDE, и мы заверяем, что вы многому научитесь, как только углубитесь в код.
Пожалуйста, отсоедините плату датчика от платы Arduino UNO и отсоедините блок питания 18650, чтобы изменить код.. В противном случае это может нанести непоправимый вред вашему роботу и ПК, поскольку может пропускать большой ток через порт USB.
Этот комплект является лишь отправной точкой и может быть расширен за счет включения других датчиков и модулей. Вы ограничены своим воображением.
TA0262 Arduino Robot ARM 4 DOF Механический комплект когтей Руководство – Скачать [оптимизировано]
TA0262 Arduino Robot ARM 4 DOF Механический комплект когтей Руководство – Скачать
Связанные руководства / ресурсы
Питание мобильного робота ардуино
Правильное питание мобильного робота на Arduino.
В этой статье мы узнаем, как правильно питать мобильного робота на Arduino. На соревнования роботов на arduino, таких как движение по линии требуется обеспечение стабильного питания робота ардиуно, подвижной платформы и всех подключенных устройств датчиков, шаговых двигателей, сервоприводов. Если всего робота ардуино питать от одного батарейного отсека, то роботу может не хватить питания, аккумуляторы быстро разрядятся и робот будет двигаться нестабильно.
На данной схеме представлен робот ардуино сортировщик с не правильно организованным питанием. Все датчики моторы сервопривод подключен к 5V и GND через плату ардуино. В таком случае подключения аккумуляторы робота быстро разрядятся и не будет хватать питания для поворота сервопривода.
Неправильное питание мобильного робота ардуино. Все запитывается от одного отсека через плату Arduino
Смысл правильного питания роботов на Arduino заключается в том, что каждый элемент робота такие как моторы, сервоприводы и т.д. должен снабжаться индивидуальным источником электроэнергии. На данном рисунке показано правильное питание робота ардуино. Сервопривод, Arduino и драйвер моторов питаются от отдельных источников питания, через стабилизатор напряжения. Стабилизатор напряжения выравнивает напряжение и обеспечивает одинаковое напряжение. При этом следует обратить внимание, что суммарное напряжение аккумуляторов в отсеке питания подключенного к стабилизатору напряжения должен превышать на1 В а лучше 1.5 В от требуемого. Выставлять требуемое напряжение на стабилизаторе напряжения можно с помощью подстрочного резистора микро отвёрткой, выставленное напряжение отражается на экране стабилизатора напряжения.
Правильная схема питания мобильного робота ардуино. Каждое устройство запитывается отдельно через стабилизатор напряжения
Каждое устройство запитывается отдельно через стабилизатор напряжения
Для правильного подключения напряжения для драйвера моторов надо соблюдать полярность и входы и выходы.
in- подключается к – батарейного отсека
in+ подключается к + батарейного отсека
out- подключается к – драйвера моторов
out+ подключается к + драйвера моторов
Питание Arduino.
может осуществляться не только через разъём, но и через плату.
К GND ардуино подключается – батарейного отсека.
К VIN ардуино подключается + батарейного отсека.
Правильное подключение сервопривода рассматривается на уроке Подключение сервопривода к ардуино
Вернуться к содержанию
Полезно почитать по теме мобильные роботы arduino
Сборка и программирование мобильного робота arduino с motorshield
Сборка и программирование мобильного робота arduino с драйвером l289
Подключение к arduino и калибровка датчиков линии
Поделиться:
Разработка роботов » Servo
| Угол поворота (гр) | 300 | |
| Масса (гр) | 55 | |
| Передаточное отношение | 1/254 | |
| Входное напряжение | at 7V | at 10V |
Максимальный момент (kgf. cm) cm) | 12 | 16.5 |
| Быстродействие Sec/60degree | 0.269 | 0.196 |
Способ управления: цифровой пакет
Скорости управления до 1 Мбит полудуплекс ТТЛ
Ток потребления до 1.5 А
Обратные связи: момент, положение, скорость, температура, входное напряжение
В этой статье мы продолжаем речь о данной линейке цифровых сервоприводов. Поговорим о том, какие подводные камни ждут пользователя при использовании этого продукта. Также расскажем, где купить, что обязательно докупить и что можно приобрести к ним опционально при желании.
Итак, начнем, в нашей предыдущей статье уже было рассказано о характеристиках и управлении, был выложен код, который мы использовали в проекте Евробот 2011. Читать полностью »
В этой статье мы поговорим о сервоприводах Dynamixel компании Robotis. Приводы Dynamixel – это сервоприводы для робототехники, обеспечивающие высокий выходной момент, хорошую точность позиционирования, управляются цифровыми пакетами и обладают гибкой настройкой, также эти приводы можно объединять в сеть. Компания Robotis выпускает целую линейку приводов с различными параметрами выходного момента. Приводы стоят от 50 до 500 долларов США за штуку в зависимости от модели. Используя сервоприводы Dynamixel как базовый элемент создано большое количество роботов-игрушек: роботы пауки, шагающие роботы, манипуляторы. Компания производит компактный модуль управления для этого чуда и поставляет некоторые библиотеки с помощью которых можно управлять с компьютера. Также для роботов, созданных целиком из этих сервоприводов, Robotis разработала среду разработки где можно с легкостью создавать различные алгоритмы движения робота. Закончим краткое описание и перейдем к использованию этого маленького чуда.
Приводы Dynamixel – это сервоприводы для робототехники, обеспечивающие высокий выходной момент, хорошую точность позиционирования, управляются цифровыми пакетами и обладают гибкой настройкой, также эти приводы можно объединять в сеть. Компания Robotis выпускает целую линейку приводов с различными параметрами выходного момента. Приводы стоят от 50 до 500 долларов США за штуку в зависимости от модели. Используя сервоприводы Dynamixel как базовый элемент создано большое количество роботов-игрушек: роботы пауки, шагающие роботы, манипуляторы. Компания производит компактный модуль управления для этого чуда и поставляет некоторые библиотеки с помощью которых можно управлять с компьютера. Также для роботов, созданных целиком из этих сервоприводов, Robotis разработала среду разработки где можно с легкостью создавать различные алгоритмы движения робота. Закончим краткое описание и перейдем к использованию этого маленького чуда.
Для подключения сервоприводов к компьютеру потребуется переходник. Я использовал фирменный переходник USB2Dynamixel. Как понятно из названия переходник подключается к компьютеру через USB. В зависимости от того какие вы используете сервоприводы у них может отличаться интерфейс подключения. Это будет либо TTL – что-то похожее на UART только с одним проводом или RS485. Читать полностью »
Почему они полезны в робототехнике
Твитнуть:
#Servo #motors используются в роботизированных приложениях, требующих точного позиционирования. #motioncontrol
В самом простом виде, #servo – это точный и мощный способ преобразования вращательного движения в линейное! #motioncontrol
Серводвигателииспользуются в роботизированных приложениях, требующих точного позиционирования. Прежде чем слишком глубоко погрузиться в способы использования сервоприводов в робототехнике, полезно сначала узнать об основных функциях и форме этих критических компонентов управления движением.
Что такое сервопривод?
По своей сути сервопривод – это точный и мощный способ преобразования вращательного движения в линейное. Сервопривод (или серводвигатель, как его иногда называют) состоит из:
- Электронный узел , который состоит из электродвигателя переменного или постоянного тока, платы контроллера и потенциометра.
- Корпус , пластиковый корпус для двигателя и других компонентов.
- Приводные шестерни , которые снижают выходную мощность двигателя на высокой скорости до более низкой скорости и высокого крутящего момента на выходе сервопривода.
- Выходной шлиц , который прикреплен к выходному валу и является конечной точкой взаимодействия между сервоприводом и объектом движения, которое он создает. Хороший пример – сервопривод в самолете с дистанционным управлением. Выходной шлиц сервопривода может быть прикреплен через тягу управления к поверхности управления, такой как элерон или руль направления. Следовательно, движение сервопривода вызовет эквивалентное движение самого самолета.
Как работает сервопривод?
- Сервопривод получает сигнал от контроллера движения.
- В зависимости от широтно-импульсной модуляции (ШИМ) входного сигнала сервопривод будет вращаться на определенную величину. В состоянии покоя выходной шлиц сервопривода обычно находится под углом 0 °. Исходя из ожидаемой частоты импульсов 20 миллисекунд (мс), ширина импульса 1,5 мс заставит выходной шлиц повернуться на 90 ° в одном направлении. Ширина импульса 2 мс заставит выходной шлиц продолжать вращаться на 90 ° до положения 180 °. Ширина импульса 1 мс заставит выходной шлиц повернуться на 180 ° назад в начальное положение 0 °.
- Потенциометр постоянно контролирует положение выходного шлица. Когда выходной шлиц достигает желаемого положения, питание двигателя отключается, и сервопривод будет удерживать это положение до тех пор, пока не получит сигнал не делать этого. При остановке в заданном положении серводвигатель будет активно пытаться удерживать это положение.
- Ключевой особенностью сервоприводов является пропорциональная работа. Серводвигатель будет работать ровно настолько быстро, насколько это необходимо для того, чтобы повернуться из текущего положения в желаемое.Если сервопривод остановлен в положении 180 °, но должен быть в положении 0 °, двигатель будет вращаться очень быстро, чтобы добраться туда. Если остановиться в положении, которое уже близко к 0 °, двигатель будет вращаться намного медленнее, чтобы добраться до этого места.
Чем полезны сервоприводы в робототехнике?
Серводвигателиобеспечивают множество преимуществ в робототехнических приложениях. Они маленькие, мощные, легко программируемые и точные. Но что наиболее важно, они обеспечивают почти идеальную повторяемость движения.Они используются в роботизированных приложениях, таких как:
Роботизированная сварка: серводвигатели установлены в каждом стыке роботизированной сварочной руки, приводя в действие движение и повышая маневренность.
Роботизированные транспортные средства: сервоприводы используются в системах рулевого управления автономных транспортных средств, используемых для обезвреживания и уничтожения бомб.
Посетите Motion Control Online, чтобы найти серводвигатели, поставляемые компаниями-членами MCMA.
Учебные пособия по сборке робота
Цифровые сервоприводы и аналоговые сервоприводы
В чем разница между аналоговым и цифровым сервоприводом?
Цифровые сервоприводы со стороны пользователя управляются так же, как аналоговые сервоприводы.Разница в том, как серводвигатель управляется через печатную плату (усилитель). Двигатель аналогового сервопривода получает сигнал от усилителя 30 раз в секунду или 30 Гц. Этот сигнал позволяет усилителю обновлять положение двигателя. Цифровые сервоприводы используют высокочастотный усилитель, который обновляет положение серводвигателя 300 раз в секунду или с частотой 300 Гц. За счет более частого обновления положения двигателя цифровой сервопривод может выдавать полный крутящий момент. от начала движения и увеличивает удерживающую способность сервопривода.Быстрый Обновление также позволяет цифровому сервоприводу иметь более узкую зону нечувствительности.
За исключением более высокой стоимости , цифровые сервоприводы имеют только преимущества перед аналоговыми сервоприводами.
Цифровой микропроцессор в 10 раз быстрее , чем аналоговый сервопривод. Это приводит к гораздо более быстрой реакции сервопривода с самого начала. развивая весь номинальный крутящий момент на 1 градус от центральной точки. Быть в курсе что этот более быстрый отклик также приводит к более высоким пусковым токам, поэтому убедитесь, что Ваши батареи справятся с этим.
Цифровые сервоприводы можно запрограммировать на направление вращения, центр. и конечные точки, вариант отказоустойчивости, регулировка скорости и мертвой полосы. Это отлично подходит для согласования наборов сервоприводов по ширине зоны нечувствительности, центральной и конечной точкам в гигантские авиационные приложения, а также для реверсирования цифрового сервопривода, когда два используются на Y-образной привязи (изображение ниже).
Если вы не хотите иметь дело с дополнительными сложностями, связанными с программирование, не беспокойтесь! Цифровые сервоприводы Hitec будут работать как стандартные сервоприводы коробки.Перед использованием их не нужно программировать.
Постоянный крутящий момент цифрового сервопривода в 3 раза больше, чем у его аналогового аналога. Это означает, что цифровые сервоприводы обычно меньше по размеру и имеют больший крутящий момент.
А как насчет модификации сервопривода? Цифровые сервоприводы также можно изменять, просто проверьте данные , чтобы убедиться.
Hitec против Futaba
На самом деле существует четыре основных производителя сервоприводов – Hitec, Futaba, Airtronics и JR Radios.Последние два сегодня необычны, поэтому я не буду о них говорить.
Сервоприводы Hitec и Futaba работают одинаково, но есть несколько интерфейсов.
различия, о которых вам следует знать.
Первый – , цвет провода , так как Hitec использует желтый сигнальный провод, а у Футаба белый. Порядок подключения такой же, только разные цвета.
Второй – это разъем совместимость. Futaba (тип J) имеет специальный фланец, а Hitec (тип S, универсальный) – нет.У Futaba есть дополнительный фланец, чтобы помочь пользователь правильно подключает сервопривод, хотя есть только два способа сделать это и неправильное подключение сервопривода на самом деле ничего не повредит. Если вы хотите подключить сервопривод Futaba к устройству Hitec, просто закрепите фланец выключите и используйте наждачную бумагу, чтобы отпилить ее до тех пор, пока она не встанет на место. Если вам когда-нибудь понадобится подключить разъем Hitec к чему-то Futaba, просто используйте наждачную бумагу, чтобы уменьшить ширину разъема, пока он не подходит.
Третий – цена .Все осталось по-прежнему: сервоприводы Hitec дешевле сервоприводов Futaba. Но не позволяйте этому быть вашим единственным определяющим фактором в вашем решении, поскольку у Futaba есть сервопривод . размеры , которых нет у Hitec.
Последнее существенное различие – в шлице . Шлиц является выходным валом сервопривода. Здесь вы можете прикрепить сервопривод или сервомеханизм . Стандартные шлицы Hitec имеют 24 зубьев, а стандартные шлицы Futaba – 25 зубьев.Что делает это важным, так это то, что сервоприводы, построенные для одного, не будут работать с другим.
Безопасность | Стеклянная дверь
Подождите, пока мы убедимся, что вы настоящий человек. Ваш контент появится в ближайшее время. Если вы продолжаете видеть это сообщение, напишите нам чтобы сообщить нам, что у вас проблемы.
Nous aider à garder Glassdoor sécurisée
Nous avons reçu des activités suspectes venant de quelqu’un utilisant votre réseau internet.Подвеска Veuillez Patient que nous vérifions que vous êtes une vraie personne. Вотре содержание apparaîtra bientôt. Si vous continuez à voir ce message, veuillez envoyer un электронная почта à pour nous informer du désagrément.
Unterstützen Sie uns beim Schutz von Glassdoor
Wir haben einige verdächtige Aktivitäten von Ihnen oder von jemandem, der in ihrem Интернет-Netzwerk angemeldet ist, festgestellt. Bitte warten Sie, während wir überprüfen, ob Sie ein Mensch und kein Bot sind.Ihr Inhalt wird в Kürze angezeigt. Wenn Sie weiterhin diese Meldung erhalten, informieren Sie uns darüber bitte по электронной почте: .
Мы вернемся к активным действиям в области Glassdoor с помощью команды IEmand die uw internet netwerk deelt. Een momentje geduld totdat, мы узнали, что u daadwerkelijk een persoon bent. Uw bijdrage zal spoedig te zien zijn. Als u deze melding blijft zien, электронная почта: om ons te laten weten dat uw проблема zich nog steeds voordoet.
Hemos estado detectando actividad sospechosa tuya o de alguien con quien compare tu red de Internet. Эспера mientras verificamos que eres una persona real. Tu contenido se mostrará en breve. Si Continúas recibiendo este mensaje, envía un correo electrónico a para informarnos de que tienes problemas.
Hemos estado percibiendo actividad sospechosa de ti o de alguien con quien compare tu red de Internet. Эспера mientras verificamos que eres una persona real.Tu contenido se mostrará en breve. Si Continúas recibiendo este mensaje, envía un correo electrónico a para hacernos saber que estás teniendo problemas.
Temos Recebido algumas atividades suspeitas de voiceê ou de alguém que esteja usando a mesma rede. Aguarde enquanto confirmamos que Você é Uma Pessoa de Verdade. Сеу контексто апаресера эм бреве. Caso продолжить Recebendo esta mensagem, envie um email para пункт нет informar sobre o проблема.
Abbiamo notato alcune attività sospette da parte tua o di una persona che condivide la tua rete Internet.Attendi mentre verifichiamo Che sei una persona reale. Il tuo contenuto verrà visualizzato a breve. Secontini visualizzare questo messaggio, invia un’e-mail all’indirizzo per informarci del проблема.
Пожалуйста, включите куки и перезагрузите страницу.
Это автоматический процесс. Ваш браузер в ближайшее время перенаправит вас на запрошенный контент.
Подождите до 5 секунд…
Перенаправление…
Заводское обозначение: CF-102 / 6bb8eb55d927163a.
Сервопривод интеллектуального робота– REV Robotics
Интеллектуальный сервопривод робота REV Robotics (SRS) – это конфигурируемый сервопривод с металлическим редуктором, который устраняет догадки при выравнивании и настройке механизмов на основе сервоприводов.Один SRS можно использовать в качестве стандартного углового сервопривода, пользовательского углового сервопривода и сервопривода непрерывного вращения, просто изменив его настройки.
Работа по умолчанию
По умолчанию SRS работает как стандартный сервопривод 270 °, реагируя на RC сервоимпульс 500–2500 мкс.
Интеллектуальные функцииРазблокировать интеллектуальные функции просто с помощью программатора REV SRS (продается отдельно).
- Угловой режим
Одним нажатием кнопки программатор SRS может установить пользовательские пределы угла, не снимая SRS с механизма.Эти настраиваемые ограничения устраняют необходимость возиться с сервоприводами или рычагами. - Режим непрерывного вращения
Щелчком переключателя на программаторе SRS SRS может переключаться из углового режима в режим непрерывного вращения. SRS экономит время и деньги, предотвращая постоянную модификацию стандартных сервоприводов.
Технические характеристики
- Размер: 40,2 мм x 20,0 мм x 38,0 мм
- Вес: 2,05 унции.
- Скорость: 0,14 с / 60 ° (при 6 В) – обратите внимание, что эта скорость немного выше для текущего инвентаря, чем заявлено ранее (.14 с / 60 ° по сравнению с 0,13 / 60 °)
- Момент опрокидывания: 13,5 кг-см / 187,8 унций на дюйм (при 6 В)
- Ток опрокидывания: 2 А (при 6 В)
- Номинальное напряжение: 4,8 В – 7,4 В , Номинальное напряжение 6 В
- Диапазон входных импульсов: 500 мкс – 2500 мкс
- Угловой диапазон по умолчанию: 270 °
- Максимальный программируемый диапазон в угловом режиме – 280 °
- Материал шестерни: металл
- Тип шлицевого соединения – 25 зуб.
- Размер внутренней резьбы шлицевого соединения: M3
- Шлицевая внутренняя резьба Глубина: 6 мм
- Не превышайте эту глубину, так как это может повредить сервопривод.
Содержимое комплекта
- REV Smart Robot Servo
- Набор для сервопривода (рычага)
- Крепежное оборудование для сервопривода
Совместимость с контроллерами
SRS имеет широкий диапазон входных сигналов, которые некоторые контроллеры могут не выдавать.Кроме того, выходной импульс может быть выделен за несколько уровней кода, так что неясно, что это за импульс на самом деле. Если движения на 180 ° не наблюдается, проверьте ширину импульса, создаваемую контроллером.
Документация
CAD
- SKU-STP
- AllREVPartsSTEPzip
Стабильный серво-робот с качественным звуком, готовый к отправке в течение 7 дней
Alibaba.com предлагает вам одни из самых впечатляющих и оптимальных по качеству серво-роботов . хорошо провести время.Этот передовой и прочный серво-робот представляет собой надежные и привлекательные игрушки с высоким уровнем моделирования, которые очень нравятся детям и взрослым и служат долго. Эти продукты являются экологически чистыми и не содержат никаких небезопасных материалов, которые могут нанести вред окружающей среде. Этот фантастический серво-робот представляет собой игрушки с дистанционным управлением, которые поставляются с мощными батареями и имеют красивый дизайн. Ведущие поставщики и оптовые торговцы на сайте предлагают эти умопомрачительные товары по доступным ценам и по выгодным ценам.Великолепный серво-робот изготовлен из прочных материалов, таких как АБС-пластик и металл, для обеспечения долговечности и долговечности. Они могут выдерживать все типы внешних воздействий и имеют водонепроницаемые покрытия, предотвращающие повреждение машин. Серво-робот обладает хорошей термостойкостью, а некоторые даже оснащены современными технологиями, которые помогают им летать, делать фотографии и многое другое. От наземных игрушек до воздушных дронов, на сайте доступны все виды серво-роботов .
Alibaba.com предлагает множество усовершенствованных серво-роботов , доступных в различных цветах, дизайнах, формах, размерах и характеристиках в зависимости от моделей, и они являются фаворитами для всех возрастных групп. Серво-робот – умные игрушки, которые можно использовать в качестве обучающих игрушек и пробудить интерес к технологиям у детей. Многие уникальные сервоботы оснащены камерами для изображений и видео высокой четкости и обладают увеличенной дальностью полета.
Посетите Alibaba.com, чтобы ознакомиться с различными сериями серво-роботов и купить продукты в рамках своего бюджета.Эти продукты доступны в виде заказов OEM и ODM вместе с послепродажным обслуживанием. Они также имеют сертификаты ISO, CE, ROHS.
Сервопривод – Магазин навыков роботов – Продукты
Походка – это модель движения конечностей животных, в том числе роботов, во время передвижения. Этот навык робота позволяет роботам иметь настраиваемый сервопривод …
Этот навык автоматически освобождает указанные сервоприводы через определенное время после их последнего движения.Это очень полезно, когда дело доходит до …
В отличие от стандартного сервопривода, у непрерывного сервопривода изменено внутреннее устройство, чтобы обеспечить непрерывное вращение на 360 градусов. Две части, которые снимаются с …
Подключайте сервоприводы Robotis Dynamixel к ARC и управляйте ими. Этот плагин с открытым исходным кодом преобразует виртуальные сервопорты на ARC (v0-v99) для управления Robotis Dynamixel …
Используйте протокол управления SM40BL для сервоприводов Feetech RS485.
Управляйте сервоприводами последовательной шины Feetech через UART или COM-порт ПК.
Этот навык сервопривода позволяет вам перемещать мышь по горизонтали (влево и вправо) на дисплее, чтобы перемещать положение горизонтального сервопривода. Горизонтальный сервопривод будет только …
Управление сервоприводами Kondo KRS с протоколом ICS 2 и 3.5
Управляйте цифровыми сервоприводами LewanSoul через последовательный порт EZ-B UART или COM
Компактные модульные приводы, которые были разработаны как эволюция стандартного сервопривода RC для использования в роботах с несколькими степенями свободы, аниматронике, пользовательских RC…
Этот элемент управления позволит сервомашинам с ШИМ иметь позиционную обратную связь в ARC.
Он получает данные АЦП от Arduino сервоприводов через I2C в EZ-B.
Серво-роботы Yushin премиум-класса с дистанционным управлением для литья под давлением
Характеристики
Yushin – это новейшая линейка выносных роботов с полным сервоприводом, серия RC была создана, чтобы воплотить в жизнь концепции скорости, надежности и эффективности.Серия RC также оснащена новым контроллером E-touch II.
Скорость
Оснащенные серводвигателями с вертикальной осью и осью смещения на полный размер больше, чем наша предыдущая линейка роботов, серия RC сокращает время выгрузки до 13% и обеспечивает повышенную производительность для своих владельцев.
Надежность
Благодаря повышенной жесткости конструкции и новой антивибрационной системе серия RC обеспечивает точный и бесшумный выгрузку и выпуск продукта для более эффективного производства.
Эффективность
Стандартная функция «ECO Vacuum» значительно снижает количество сжатого воздуха, необходимого для всасывания продукта во время разгрузки. Благодаря этой и другим функциям энергосбережения владельцы смогут снизить эксплуатационные расходы.
Новый инновационный контроллер
Новый контроллер E-touch II серии RC делает работу еще проще благодаря новой панели оператора, звуковым подсказкам, анимированным диаграммам на основе значков и многому другому.
Контроллер E-touch II
Брошюра по контроллеруE Touch II
E-touch II – это усовершенствованный контроллер, который используется с серией RCII и, в варианте K, с серией сверхвысоких скоростей HSA.Этот контроллер в полной мере использует свой полноцветный сенсорный экран с диагональю 10,4 дюйма, чтобы максимально эффективно отображать графический интерфейс пользователя. В дополнение к реальным кнопкам управления, расположенным вокруг экрана, на экране используются графические сенсорные кнопки для предоставления ряда опций, которые всегда актуальны для вашей текущей задачи.
Те, кто занимается программированием, найдут в E-touch II множество полезных функций:
Lead Through Teaching
Это приложение упрощает задачу редактирования программы, позволяя вам записывать ручные операции, а также использовать / изменять стандартные движения шаблона по любой оси для получения необходимого результата.Lead Through Teaching позволяет получать результаты с помощью робота без специальных знаний или использования внешнего компьютера.
Easy Teaching / Easy Screen
Приложение Easy Teaching еще больше упрощает задачи программирования за счет объединения настроек положения, скорости и таймера на одном экране. Используя встроенный дисплей диаграммы действий, вы можете просто выбрать один из отображаемых значков, чтобы создать желаемую последовательность ходов. Операторам доступен соответствующий режим Easy Screen, который аналогичным образом упрощает опции в выбираемые экранные подсказки.
Трехмерный симулятор
Встроенный трехмерный графический симулятор позволяет вам проверить результат вашей новой программы перед отправкой его роботу. Эта функция является ценным инструментом для экономии времени при совершенствовании новых процедур, а также значительно снижает вероятность повреждения из-за неправильных команд.
Автоматическое замедление
Если эта функция включена, используются пользовательские алгоритмы для автоматического уменьшения скорости движения любой оси непосредственно перед размещением детали.Это может значительно снизить вибрацию инструмента и исключает необходимость задержек во время выполнения программы, что позволяет сократить общее время цикла.
Режим поиска и устранения неисправностей
Дополнительную помощь оказывает режим поиска и устранения неисправностей, который можно использовать для выявления ошибок или проблем с запрограммированной операцией.
Характеристики
- Полноцветный сенсорный дисплей с диагональю 10,4 дюйма
- «Настоящие» кнопки навигации и управления
- Контекстно-зависимые экранные кнопки
- Выступающая красная кнопка остановки безопасности
- Совместимость с Compact Flash, USB, Smart Media и картами памяти SD для хранения и передачи программ
- Достаточно внутренней памяти для 300 установок пресс-формы
- Lead Through Teaching для прямого программирования
- Позиционирование хода на экране
- Подключение Ethernet
- Дистанционное управление, передача данных и обновления программ доступны через ресурсы онлайн-поддержки
- Обновления программ и услуг доступны через ресурсы онлайн-поддержки
- Приложение Easy Teaching для программирования
- Система помощи оператору Easy Screen
- Экран 3D-симулятора работы робота
- Режим автоматического замедления снижает скорость движения непосредственно перед размещением детали для освобождения от вибрации
- Режим поиска и устранения неисправностей позволяет отслеживать ошибки / проблемы
- Простота использования с рук
- Защитные резиновые кромки
- Дополнительный монитор контура всасывания вакуума
