
Частотный преобразователь: полный обзор функций частотника
Преобразователем частоты именуют статическую преобразовательную конструкцию, используемую с целью регуляции скорости вращения асинхронного электрического двигателя. Устройства данного типа, работающие на переменном токе, гораздо проще сконструированы, и их легче эксплуатировать в сравнении с двигателями, использующими постоянный ток. Это способствует популяризации асинхронного электродвигателя.
Преобразователь частоты обеспечивает плавность пуска и остановки электрического двигателя. Наиболее уместно его использование для крупного электродвигателя с большой мощностью.
Кроме частотного преобразователя для регуляции вращательной скорости могут применяться: механические вариаторы, гидравлические муфты и т. д. Однако, такие компоненты имеют ряд недостатков:
- Низкий уровень качества;
- Сложная конструкция;
- Высокая себестоимость;
- Узкий диапазон вариантов рабочей частоты.
Частотный преобразователь для электродвигателя, регулирующий уровень напряжения питающего тока и его частоту, по данным пунктам явно отличается в лучшую сторону. Как результат, КПД преобразования стремится к ста процентам при достаточно низкой угрозе поломок.
Как результат, КПД преобразования стремится к ста процентам при достаточно низкой угрозе поломок.
Классификация преобразователей частоты
Согласно типу питающего напряжения необходимого для работы частотного преобразователя, существуют устройства следующих групп:
- Однофазные;
- Трёхфазные;
- Высоковольтные.
Преобразователь может быть подключён к электродвигателям следующих типов:
- Однофазным, имеющим расщеплённые полюса, и однофазным конденсаторным;
- Трёхфазным, асинхронного типа, работающим с использованием переменного тока.
- Оснащённых постоянными магнитами.
Существует несколько сфер использования частотного преобразователя:
- Общепромышленная;
- Векторное преобразование частоты;
- Механизмы с насосно-вентиляторным типом нагрузки;
- Преобразователи частоты в кранах и иных подъёмных механизмах;
Также существуют взрывозащищённые преобразователи, ориентированные на тяжёлые условия эксплуатации, и децентрализованные модели, которые устанавливаются прямо на базе асинхронного электродвигателя.
Особенности устройства преобразователя частоты
Типичная схема, свойственная частотному преобразователю, основана на построении двойного преобразования. Это означает, что устройство состоит из:
- Звена постоянного тока, также сформированного из неуправляемого выпрямителя и фильтра;
- Силового импульсного инвентора;
- Системы управления.
Первый компонент отвечает за преобразование переменного сетевого напряжения в постоянное. После неуправляемого выпрямителя движения тока происходит через транзисторные ключи, обеспечивающие подключение обмотки асинхронного двигателя к положительным и отрицательным выводам звена постоянного тока. Эти транзисторы вместе называются силовым импульсным инвентором. Трёхфазный инвентор, состоящий из шести, осуществляет преобразование выпрямленного напряжения соответственно в трёхфазное переменное значение необходимой частоты и амплитуды, передаваемое на обмотку статора электрического двигателя.
Для компоновки импульсного инвентора предпочтительно использование IGBT-транзисторов (биполярные, имеют затвор), поскольку они являются обладателями достаточно высокой частоты переключения. Это позволяет формировать на выходе синусоидальный сигнал с минимальными искажениями.
Это позволяет формировать на выходе синусоидальный сигнал с минимальными искажениями.
Принципы функционирования частотного преобразователя
Регуляция пускового тока может осуществляться вручную, но это увеличивает затраты электропотребления и снижает срок эксплуатации асинхронного двигателя. Обычно без преобразователя напряжения показания до семи раз превышают значение номинала. Определённо, это не самые лучшие условия для эксплуатации.
Принцип работы преобразователей частоты связан со спецификой действия асинхронного электродвигателя. У двигателя подобного вида наблюдается зависимость между вращательной частотой магнитного поля и частотой напряжения питающего тока. В данном моменте и заключается смысл методики частотного управления. Изменяемая преобразователем входная частота напряжения отвечает за регуляцию частоты вращения. Таким образом, диапазон значений выходного напряжения весьма широк.
По принципу работы силового элемента частотные преобразователи можно отнести к следующим категориям:
- Конструкции, имеющие выраженный промежуточный неуправляемый выпрямитель.
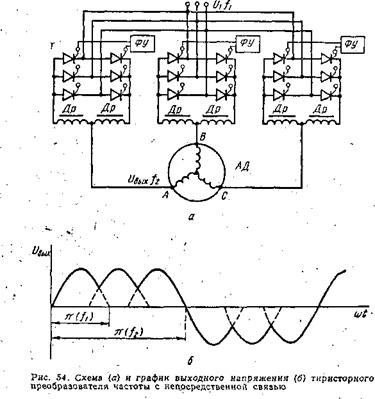
- Конструкции, имеющие непосредственную связь (без промежуточного звена).
Частотники второго типа появились гораздо раньше, в них силовой компонент представлен управляемым выпрямителем, сконструированным из тиристоров. Формирование выходного сигнала происходит при поочерёдном отпирании тиристоров управляющим узлом. На сегодняшний день такие приборы потеряли свою актуальность.
Что касается частотного преобразователя первого типа, то он примечателен тем, что его можно запитать через внешнее звено постоянного тока. Сам частотник при этом защищается предохранителем быстрого действия. Однако, это делает нежелательным применение контакторов, поскольку данная разновидность коммутации провоцирует возникновение повышенного зарядного тока и выгорание предохранителей.
Работа частотного преобразователя связана с принципом двойного преобразования напряжения:
- Регуляция сетевого напряжения через выпрямление и фильтрование (для этого используются конденсаторные системы).
- Задействуется электронное управление, устанавливающее заблаговременно выбранную частоту тока.
- Происходит образование прямоугольных импульсов, корректируемых при помощи обмотки статора. В результате они преобразуются в синусоиду.
Содержание двух принципов управления преобразователем частоты
Существует диада основных принципов регуляции частотных преобразователей:
- Принцип скалярного управления.
Преобразователи частоты управляемые по данному принципу имеют низкую себестоимость. Часто применяются в приводах устройств, где степень частоты вращения может регулироваться в соотношении 1:40. Это позволяет адекватно управлять работой насосов, компрессоров, вентиляторов. К тому скалярный метод позволяет осуществлять регуляцию работы сразу нескольких электродвигателей.
- Векторный принцип.
Имеют максимальное совпадение характеристик асинхронных электроприводов с параметрами приводов ПТ. Этому способствует разделение регуляционных каналов, связанных с потокосцеплением и вращательной скоростью асинхронного двигателя. Частотники, работающие в рамках данной системы управления, более дорогие по цене и применяются в устройствах требующих высокоточного регулирования скорости: станках, лифтах, кранах.
Частотники, работающие в рамках данной системы управления, более дорогие по цене и применяются в устройствах требующих высокоточного регулирования скорости: станках, лифтах, кранах.
Как и где следует применять частотный преобразователь
Частотный преобразователь позволяет регулировать скорость действия следующих механизмов:
- Насосов, перекачивающих горячую или холодную воду по системе водоснабжения и обогрева;
- Вспомогательных агрегатов котельных, тепловых электростанций, ТЭЦ и т.д.;
- Дробилках, мельницах, мешалках;
- Песковых и пульповых насосов, используемых на обогатительных фабриках;
- Лифтовых установок;
- Разнотипных центрифуг;
- Производственных линий, создающих ленточные материалы;
- Кранового и эскалаторного оборудования;
- Устройств, обеспечивающих силовые манипуляции;
- Приводов на буровых станках, специализированных приборов и так далее.
Наиболее очевидна польза частотных преобразователей с точки зрения экономии:
- Оптимальный уровень КПД позволяет вдвое экономить электроэнергию.

- Количество и качество конечного продукта в производственной значительно возрастает.
- Комплектующие механизма меньше изнашиваются;
- Общая длительность эксплуатации оборудования также возрастает.
Как итог, частотный преобразователь отвечает за эффективность и продуктивность функционирования механизмов.
Тонкости выбора частотного преобразователя
Основным значимым параметром, при выборе той или иной модели преобразователя частоты, на сегодняшний день является именно его стоимость. Это обусловлено тем, что только для дорогого устройства характерна максимальная функциональность. Но это не отменяет наличие специфических требований в зависимости от того, для механизма какой категории подбирается преобразователь, поэтому необходимо учитывать:
- Разновидность и данные по мощности асинхронного электродвигателя, к которому подключается частотник;
- Насколько точно и в каком диапазоне можно регулировать скорость;
- Насколько точно осуществляется поддержание момента и скорости вращения на валу электрического двигателя;
- Соответствие конструкции (формы, размера, пульта управления и так далее) индивидуальным требованиям.
Обязательно также обратить внимание на значение мощности асинхронного электрического двигателя, с которым будет взаимодействовать преобразователь частоты. Если один из параметров (например: величина пускового момента, затрачиваемое на разгон или торможение время) должен соответствовать каким-то особым требованиям, то нужно выбрать устройство более высокого класса, чем потенциально подходящее.
Самостоятельная сборка преобразователя
Чтобы механизм адекватно функционировал, сеть должна обладать весьма широкой вариацией значений напряжения. Это снижает риск поломки устройства при резких скачках.
Частота должна соответствовать производственным запросам. Нижний предел этого параметра позволяет ориентироваться в спектре возможностей регулирования скорости привода. В случае, если требуется расширить частотный диапазон относительно уже имеющегося, то необходимо подобрать модель частотного преобразователя, принцип работы которой относится к векторному типу.
Однако, стандартный рабочий диапазон составляет 10-60 Герц и лишь иногда доходит до 100 Герц.
Далее следует обратить внимание на входы и выходы управления. Процесс применения устройств с достаточно большим количеством разъёмов гораздо более удобен. Но и стоимость от этого возрастает, кроме того, затрудняется настройка. Подобные приборы могут быть оснащены дискретными, цифровыми или аналоговыми разъёмами.
Использование дискретного разъёма позволяет вводить управляющие команды и выводить информацию о течении процесса. Цифровой разъём обеспечивает введение сигналов, подаваемых цифровыми датчиками. Аналоговый разъём предназначен для введения сигнала обеспечивающего обратную связь.
Также следует проверять соответствие характеристик шины управления и возможностей преобразователя. В первую очередь это можно понять по соответствию числа разъёмов. По возможности их должно быть даже больше, чем требуется, чтобы имелся простор для модернизирования.
Если говорить о перегрузочных способностях, то следует предпочесть модели, которые имеют уровень мощности на 15% превышающий данные по мощности у двигателя.
В любом случае всегда нужно как следует изучать прилагающуюся к частотнику документацию. Там можно найти все требуемые сведения о параметрах и характеристиках.
Схема сборки
Следующая последовательность подойдёт для проводки, функционирующей с уровнем напряжения в 220 вольт и на одной фазе. Схема рассчитана на двигатель уровнем мощности не более 1 кВт.
В первую очередь осуществляется соединение обмоток двигателя по принципу “треугольник”.
В качестве фундамента преобразователя используется пара плат. Одна из них необходима для блока питания и драйвера. Также туда будут относиться транзисторы и силовые клеммы. Другую плату применяют, чтобы закрепить микроконтроллер и индикатор. Между собой платы контактируют посредством гибкого шлейфа.
Для моделирования импульсного блока питания понадобится стандартная схема, которую можно обнаружить в сети.
Для контроля работы двигателя и напряжения не нужно влиять на ток извне. Тем не менее вполне уместно ввести в устройство линейную развязку с микросхемой.
На общем радиаторе устройства фиксируются транзисторы и диодный мост.
Обязательно потребуются оптроны ОС2-4, которые используются для дублирования кнопок управления. А с помощью ОС-1 выполняются пользовательские функции.
Однофазный преобразователь частоты не нуждается в трансформаторе. В качестве альтернативы воспользоваться токовым шунтом, который при необходимости дополняется при помощи усилителя DA-1.
При мощности до 400 ватт схема для стабильной работы двигателя не требует установки термодатчика. Уровень сетевого напряжения вполне можно контролировать усилителем DA-1-2.
Для управляющих кнопок необходима защита в виде пластиковых толкателей. Сам процесс управления построен на опторазвязке.
При применении проводов чрезмерной длины, используются помехоподавляющие кольца.
Методика подключения преобразователя частоты к двигателю
Подключение преобразователя возможно только при соблюдении рекомендованной изготовителем комплектации устройства:
- Сечения определённых типов;
- Провода определённых типов;
- Дополнительное оборудование.

К дополнительному оборудованию можно отнести:
- Реактор ПТ;
- Тормозной блок;
- Фильтр (входной/выходной).
Не рекомендовано занижение номинала автоматического выключателя. Даже минимальное несоответствие может привести к хаотичному размыканию цепи, что зачастую сводит ситуацию к тому, что звено постоянного тока выходит из строя, и схема оказывается нарушена. Следует обращать внимание на то, чтобы наконечники проводов были хорошо обжаты.
Зачастую при самостоятельной установке входная и выходная клеммы оказываются перепутаны (хотя общепонятную маркировку преобразователя вполне можно увидеть). Поэтому нужно знать, схема формируется таким образом, что клеммы L1, L2, L3 используются для соединения с питающей сетью, а U, V, W – предназначаются для электродвигателя. Если не соблюсти этого правила, скорее всего придётся всё ремонтировать.
Ввод в эксплуатацию преобразователя частоты Danfoss VLT Micro Drive FC 51
Watch this video on YouTube
Также, поломка гарантирована, если на входы управляющего элемента осуществляется подача напряжения на 220 и 380 вольт.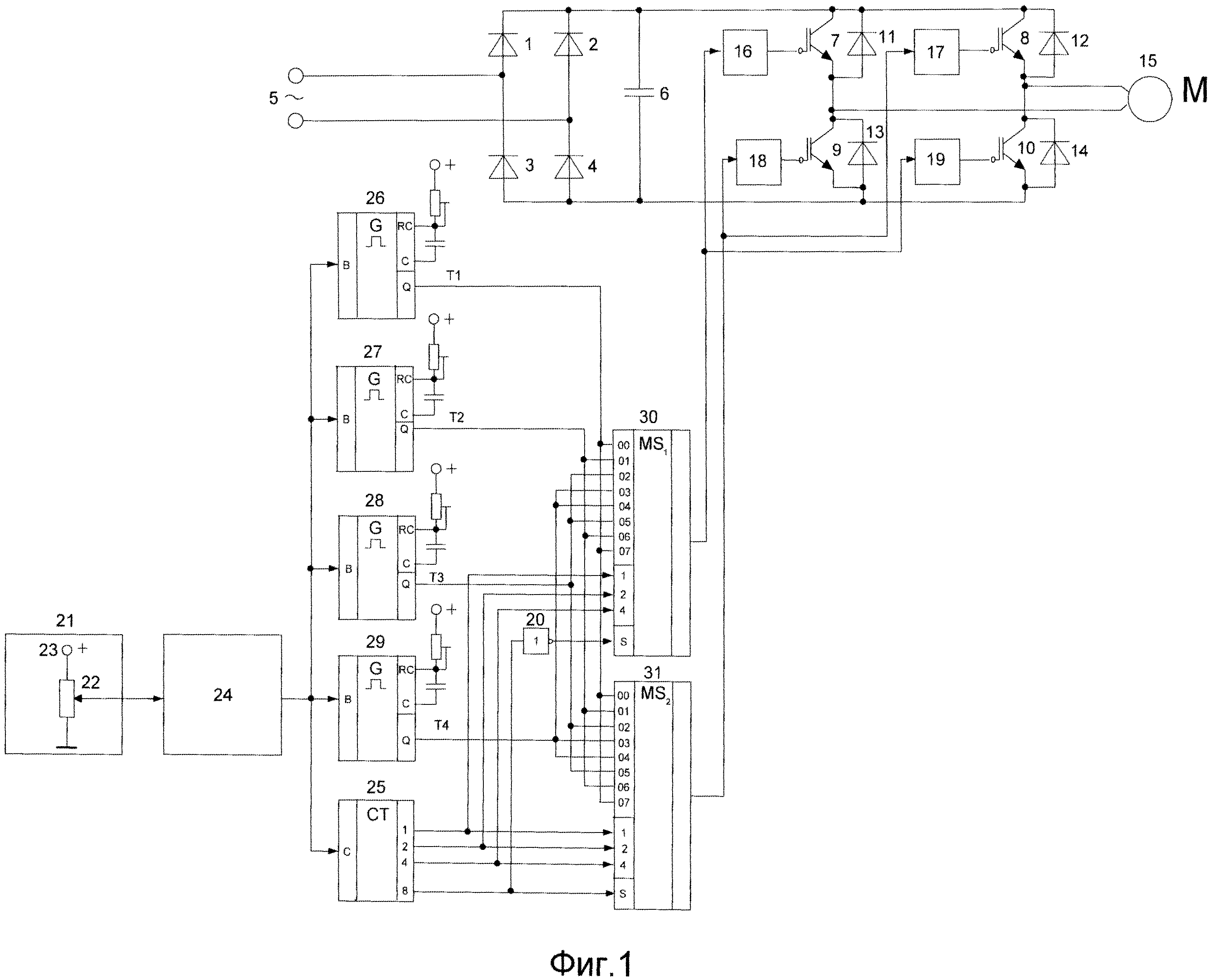
Уход за преобразователем
Чтобы продлить срок службы ПЧ следует осуществлять за ним соответствующий уход:
- Отслеживать оседание пыли на внутренних элементах и производить своевременную чистку устройства при помощи компрессора.
- Удостоверяться в работоспособности узлов, которые используются механизме, и производить их замену, если возникает такая необходимость.
- Соблюдать адекватную рабочую температуру (не более +40°С) механизма и уровень напряжения на управляющей шине.
- Регулярно (не реже одного раза за 3 года) обновлять слой термопасты на силовых компонентах устройства.
- По возможности соблюдать умеренный уровень влажности.
Частотный преобразователь: полный обзор функций частотника
Преобразователем частоты именуют статическую преобразовательную конструкцию, используемую с целью регуляции скорости вращения асинхронного электрического двигателя. Устройства данного типа, работающие на переменном токе, гораздо проще сконструированы, и их легче эксплуатировать в сравнении с двигателями, использующими постоянный ток. Это способствует популяризации асинхронного электродвигателя.
Это способствует популяризации асинхронного электродвигателя.
Преобразователь частоты обеспечивает плавность пуска и остановки электрического двигателя. Наиболее уместно его использование для крупного электродвигателя с большой мощностью.
Кроме частотного преобразователя для регуляции вращательной скорости могут применяться: механические вариаторы, гидравлические муфты и т. д. Однако, такие компоненты имеют ряд недостатков:
- Низкий уровень качества;
- Сложная конструкция;
- Высокая себестоимость;
- Узкий диапазон вариантов рабочей частоты.
Частотный преобразователь для электродвигателя, регулирующий уровень напряжения питающего тока и его частоту, по данным пунктам явно отличается в лучшую сторону. Как результат, КПД преобразования стремится к ста процентам при достаточно низкой угрозе поломок.
Классификация преобразователей частоты
Согласно типу питающего напряжения необходимого для работы частотного преобразователя, существуют устройства следующих групп:
- Однофазные;
- Трёхфазные;
- Высоковольтные.
Преобразователь может быть подключён к электродвигателям следующих типов:
- Однофазным, имеющим расщеплённые полюса, и однофазным конденсаторным;
- Трёхфазным, асинхронного типа, работающим с использованием переменного тока.
- Оснащённых постоянными магнитами.
Существует несколько сфер использования частотного преобразователя:
- Общепромышленная;
- Векторное преобразование частоты;
- Механизмы с насосно-вентиляторным типом нагрузки;
- Преобразователи частоты в кранах и иных подъёмных механизмах;
Также существуют взрывозащищённые преобразователи, ориентированные на тяжёлые условия эксплуатации, и децентрализованные модели, которые устанавливаются прямо на базе асинхронного электродвигателя.
Особенности устройства преобразователя частоты
Типичная схема, свойственная частотному преобразователю, основана на построении двойного преобразования. Это означает, что устройство состоит из:
- Звена постоянного тока, также сформированного из неуправляемого выпрямителя и фильтра;
- Силового импульсного инвентора;
- Системы управления.
Первый компонент отвечает за преобразование переменного сетевого напряжения в постоянное. После неуправляемого выпрямителя движения тока происходит через транзисторные ключи, обеспечивающие подключение обмотки асинхронного двигателя к положительным и отрицательным выводам звена постоянного тока. Эти транзисторы вместе называются силовым импульсным инвентором. Трёхфазный инвентор, состоящий из шести, осуществляет преобразование выпрямленного напряжения соответственно в трёхфазное переменное значение необходимой частоты и амплитуды, передаваемое на обмотку статора электрического двигателя.
Для компоновки импульсного инвентора предпочтительно использование IGBT-транзисторов (биполярные, имеют затвор), поскольку они являются обладателями достаточно высокой частоты переключения. Это позволяет формировать на выходе синусоидальный сигнал с минимальными искажениями.
Принципы функционирования частотного преобразователя
Регуляция пускового тока может осуществляться вручную, но это увеличивает затраты электропотребления и снижает срок эксплуатации асинхронного двигателя.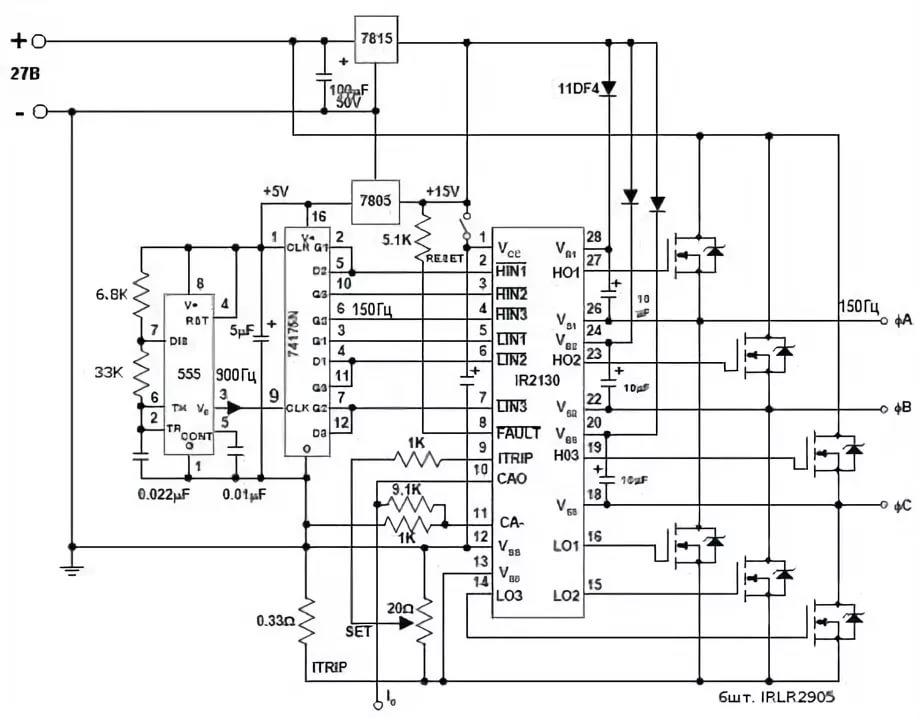 Обычно без преобразователя напряжения показания до семи раз превышают значение номинала. Определённо, это не самые лучшие условия для эксплуатации.
Обычно без преобразователя напряжения показания до семи раз превышают значение номинала. Определённо, это не самые лучшие условия для эксплуатации.
Принцип работы преобразователей частоты связан со спецификой действия асинхронного электродвигателя. У двигателя подобного вида наблюдается зависимость между вращательной частотой магнитного поля и частотой напряжения питающего тока. В данном моменте и заключается смысл методики частотного управления. Изменяемая преобразователем входная частота напряжения отвечает за регуляцию частоты вращения. Таким образом, диапазон значений выходного напряжения весьма широк.
По принципу работы силового элемента частотные преобразователи можно отнести к следующим категориям:
- Конструкции, имеющие выраженный промежуточный неуправляемый выпрямитель.
- Конструкции, имеющие непосредственную связь (без промежуточного звена).
Частотники второго типа появились гораздо раньше, в них силовой компонент представлен управляемым выпрямителем, сконструированным из тиристоров.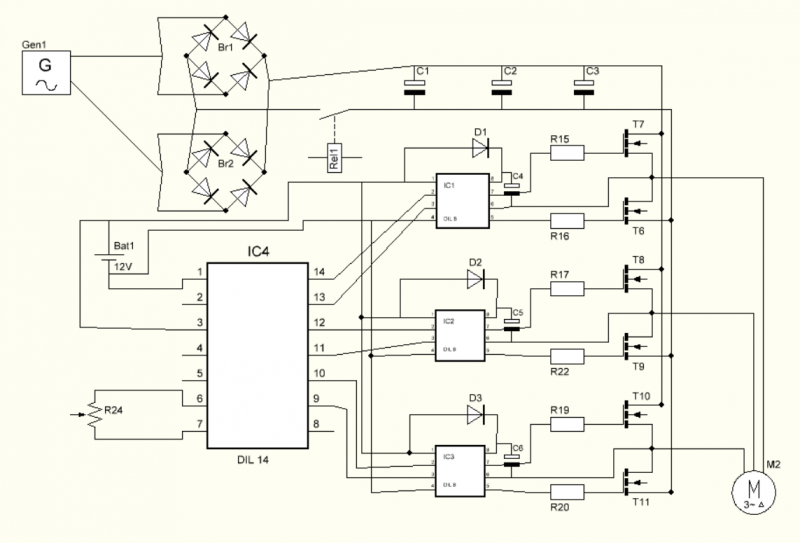 Формирование выходного сигнала происходит при поочерёдном отпирании тиристоров управляющим узлом. На сегодняшний день такие приборы потеряли свою актуальность.
Формирование выходного сигнала происходит при поочерёдном отпирании тиристоров управляющим узлом. На сегодняшний день такие приборы потеряли свою актуальность.
Что касается частотного преобразователя первого типа, то он примечателен тем, что его можно запитать через внешнее звено постоянного тока. Сам частотник при этом защищается предохранителем быстрого действия. Однако, это делает нежелательным применение контакторов, поскольку данная разновидность коммутации провоцирует возникновение повышенного зарядного тока и выгорание предохранителей.
Работа частотного преобразователя связана с принципом двойного преобразования напряжения:
- Регуляция сетевого напряжения через выпрямление и фильтрование (для этого используются конденсаторные системы).
- Задействуется электронное управление, устанавливающее заблаговременно выбранную частоту тока.
- Происходит образование прямоугольных импульсов, корректируемых при помощи обмотки статора. В результате они преобразуются в синусоиду.
Содержание двух принципов управления преобразователем частоты
Существует диада основных принципов регуляции частотных преобразователей:
- Принцип скалярного управления.
Преобразователи частоты управляемые по данному принципу имеют низкую себестоимость. Часто применяются в приводах устройств, где степень частоты вращения может регулироваться в соотношении 1:40. Это позволяет адекватно управлять работой насосов, компрессоров, вентиляторов. К тому скалярный метод позволяет осуществлять регуляцию работы сразу нескольких электродвигателей.
- Векторный принцип.
Имеют максимальное совпадение характеристик асинхронных электроприводов с параметрами приводов ПТ. Этому способствует разделение регуляционных каналов, связанных с потокосцеплением и вращательной скоростью асинхронного двигателя. Частотники, работающие в рамках данной системы управления, более дорогие по цене и применяются в устройствах требующих высокоточного регулирования скорости: станках, лифтах, кранах.
Как и где следует применять частотный преобразователь
Частотный преобразователь позволяет регулировать скорость действия следующих механизмов:
- Насосов, перекачивающих горячую или холодную воду по системе водоснабжения и обогрева;
- Вспомогательных агрегатов котельных, тепловых электростанций, ТЭЦ и т.д.;
- Дробилках, мельницах, мешалках;
- Песковых и пульповых насосов, используемых на обогатительных фабриках;
- Лифтовых установок;
- Разнотипных центрифуг;
- Производственных линий, создающих ленточные материалы;
- Кранового и эскалаторного оборудования;
- Устройств, обеспечивающих силовые манипуляции;
- Приводов на буровых станках, специализированных приборов и так далее.
Наиболее очевидна польза частотных преобразователей с точки зрения экономии:
- Оптимальный уровень КПД позволяет вдвое экономить электроэнергию.
- Количество и качество конечного продукта в производственной значительно возрастает.
- Комплектующие механизма меньше изнашиваются;
- Общая длительность эксплуатации оборудования также возрастает.
Как итог, частотный преобразователь отвечает за эффективность и продуктивность функционирования механизмов.
Тонкости выбора частотного преобразователя
Основным значимым параметром, при выборе той или иной модели преобразователя частоты, на сегодняшний день является именно его стоимость. Это обусловлено тем, что только для дорогого устройства характерна максимальная функциональность. Но это не отменяет наличие специфических требований в зависимости от того, для механизма какой категории подбирается преобразователь, поэтому необходимо учитывать:
- Разновидность и данные по мощности асинхронного электродвигателя, к которому подключается частотник;
- Насколько точно и в каком диапазоне можно регулировать скорость;
- Насколько точно осуществляется поддержание момента и скорости вращения на валу электрического двигателя;
- Соответствие конструкции (формы, размера, пульта управления и так далее) индивидуальным требованиям.

Обязательно также обратить внимание на значение мощности асинхронного электрического двигателя, с которым будет взаимодействовать преобразователь частоты. Если один из параметров (например: величина пускового момента, затрачиваемое на разгон или торможение время) должен соответствовать каким-то особым требованиям, то нужно выбрать устройство более высокого класса, чем потенциально подходящее.
Самостоятельная сборка преобразователя
Чтобы механизм адекватно функционировал, сеть должна обладать весьма широкой вариацией значений напряжения. Это снижает риск поломки устройства при резких скачках.
Частота должна соответствовать производственным запросам. Нижний предел этого параметра позволяет ориентироваться в спектре возможностей регулирования скорости привода. В случае, если требуется расширить частотный диапазон относительно уже имеющегося, то необходимо подобрать модель частотного преобразователя, принцип работы которой относится к векторному типу.
Однако, стандартный рабочий диапазон составляет 10-60 Герц и лишь иногда доходит до 100 Герц.
Далее следует обратить внимание на входы и выходы управления. Процесс применения устройств с достаточно большим количеством разъёмов гораздо более удобен. Но и стоимость от этого возрастает, кроме того, затрудняется настройка. Подобные приборы могут быть оснащены дискретными, цифровыми или аналоговыми разъёмами.
Использование дискретного разъёма позволяет вводить управляющие команды и выводить информацию о течении процесса. Цифровой разъём обеспечивает введение сигналов, подаваемых цифровыми датчиками. Аналоговый разъём предназначен для введения сигнала обеспечивающего обратную связь.
Также следует проверять соответствие характеристик шины управления и возможностей преобразователя. В первую очередь это можно понять по соответствию числа разъёмов. По возможности их должно быть даже больше, чем требуется, чтобы имелся простор для модернизирования.
Если говорить о перегрузочных способностях, то следует предпочесть модели, которые имеют уровень мощности на 15% превышающий данные по мощности у двигателя.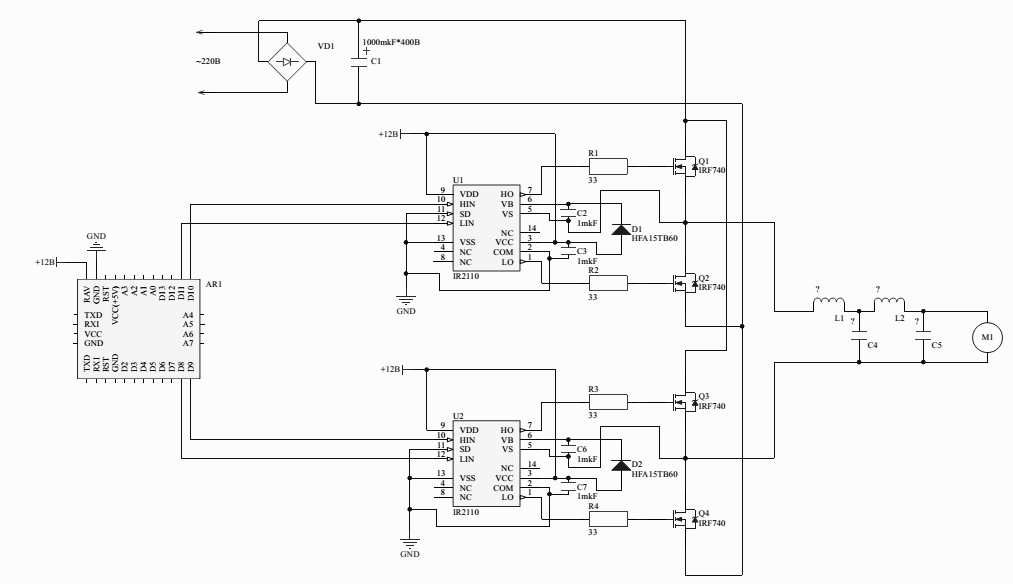
В любом случае всегда нужно как следует изучать прилагающуюся к частотнику документацию. Там можно найти все требуемые сведения о параметрах и характеристиках.
Схема сборки
Следующая последовательность подойдёт для проводки, функционирующей с уровнем напряжения в 220 вольт и на одной фазе. Схема рассчитана на двигатель уровнем мощности не более 1 кВт.
В первую очередь осуществляется соединение обмоток двигателя по принципу “треугольник”.
В качестве фундамента преобразователя используется пара плат. Одна из них необходима для блока питания и драйвера. Также туда будут относиться транзисторы и силовые клеммы. Другую плату применяют, чтобы закрепить микроконтроллер и индикатор. Между собой платы контактируют посредством гибкого шлейфа.
Для моделирования импульсного блока питания понадобится стандартная схема, которую можно обнаружить в сети.
Для контроля работы двигателя и напряжения не нужно влиять на ток извне. Тем не менее вполне уместно ввести в устройство линейную развязку с микросхемой.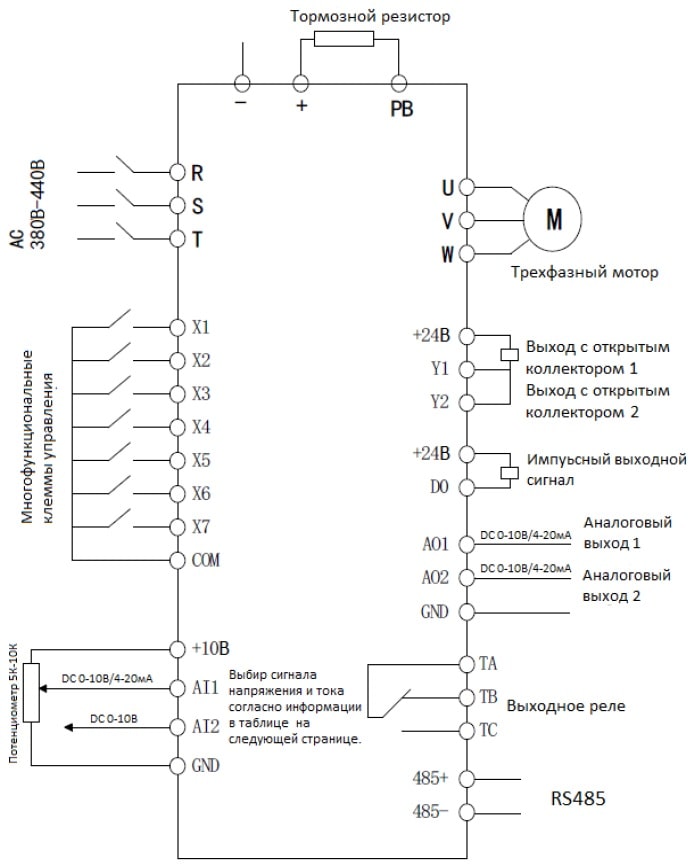
На общем радиаторе устройства фиксируются транзисторы и диодный мост.
Обязательно потребуются оптроны ОС2-4, которые используются для дублирования кнопок управления. А с помощью ОС-1 выполняются пользовательские функции.
Однофазный преобразователь частоты не нуждается в трансформаторе. В качестве альтернативы воспользоваться токовым шунтом, который при необходимости дополняется при помощи усилителя DA-1.
При мощности до 400 ватт схема для стабильной работы двигателя не требует установки термодатчика. Уровень сетевого напряжения вполне можно контролировать усилителем DA-1-2.
Для управляющих кнопок необходима защита в виде пластиковых толкателей. Сам процесс управления построен на опторазвязке.
При применении проводов чрезмерной длины, используются помехоподавляющие кольца.
Методика подключения преобразователя частоты к двигателю
Подключение преобразователя возможно только при соблюдении рекомендованной изготовителем комплектации устройства:
- Сечения определённых типов;
- Провода определённых типов;
- Дополнительное оборудование.
К дополнительному оборудованию можно отнести:
- Реактор ПТ;
- Тормозной блок;
- Фильтр (входной/выходной).
Не рекомендовано занижение номинала автоматического выключателя. Даже минимальное несоответствие может привести к хаотичному размыканию цепи, что зачастую сводит ситуацию к тому, что звено постоянного тока выходит из строя, и схема оказывается нарушена. Следует обращать внимание на то, чтобы наконечники проводов были хорошо обжаты.
Зачастую при самостоятельной установке входная и выходная клеммы оказываются перепутаны (хотя общепонятную маркировку преобразователя вполне можно увидеть). Поэтому нужно знать, схема формируется таким образом, что клеммы L1, L2, L3 используются для соединения с питающей сетью, а U, V, W – предназначаются для электродвигателя. Если не соблюсти этого правила, скорее всего придётся всё ремонтировать.
Ввод в эксплуатацию преобразователя частоты Danfoss VLT Micro Drive FC 51
Watch this video on YouTube
Также, поломка гарантирована, если на входы управляющего элемента осуществляется подача напряжения на 220 и 380 вольт.
Уход за преобразователем
Чтобы продлить срок службы ПЧ следует осуществлять за ним соответствующий уход:
- Отслеживать оседание пыли на внутренних элементах и производить своевременную чистку устройства при помощи компрессора.
- Удостоверяться в работоспособности узлов, которые используются механизме, и производить их замену, если возникает такая необходимость.
- Соблюдать адекватную рабочую температуру (не более +40°С) механизма и уровень напряжения на управляющей шине.
- Регулярно (не реже одного раза за 3 года) обновлять слой термопасты на силовых компонентах устройства.
- По возможности соблюдать умеренный уровень влажности.
Простой преобразователь частоты для асинхронного электродвигателя.
РадиоКот >Схемы >Питание >Преобразователи и UPS >Простой преобразователь частоты для асинхронного электродвигателя.
Итак коль уж асинхронный двигатель так распространён и трехфазная система напряжения созданная М. О. Доливо-Добровольским так удобна. А современная элементная база так хороша. То сделать преобразователь частоты –это лишь вопрос личного желания и некоторых финансовых возможностей. Возможно кто то скажет « Ну, зачем мне инвертор , я поставлю фазосдвигающий конденсатор и все решено» . Но при этом обороты не покрутишь и в мощности потеряешь и потом это не интересно.
О. Доливо-Добровольским так удобна. А современная элементная база так хороша. То сделать преобразователь частоты –это лишь вопрос личного желания и некоторых финансовых возможностей. Возможно кто то скажет « Ну, зачем мне инвертор , я поставлю фазосдвигающий конденсатор и все решено» . Но при этом обороты не покрутишь и в мощности потеряешь и потом это не интересно.
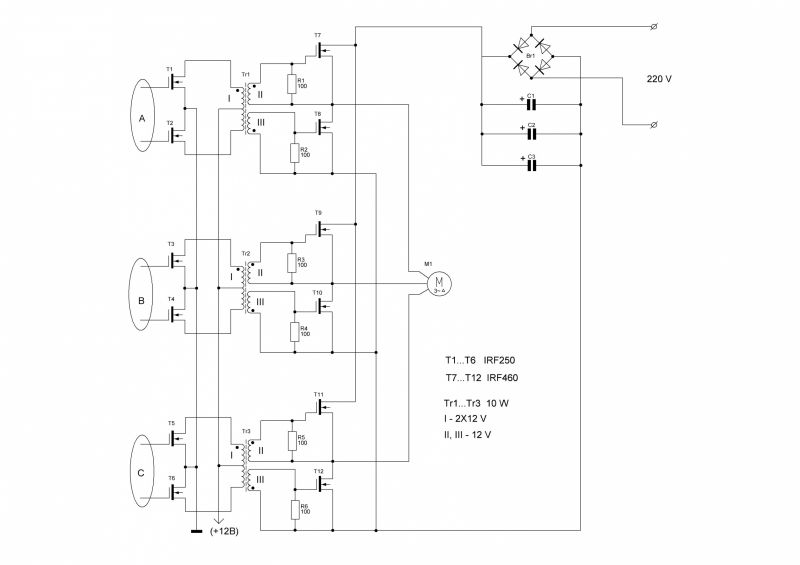
Возьмём за основу – в быту есть однофазная сеть 220в, народный размер двигателя до 1 кВт. Значить соединяем обмотки двигателя треугольником. Дальше –проще, понадобится драйвер трехфазного моста IR2135(IR2133) выбираем такой потому, что он применяется в промышленной технике имеет вывод SD и удобное расположение выводов. Подойдёт и IR2132 , но у неё dead time больше и выхода SD нет. В качестве генератора PWM выберем микроконтроллер AT90SPWM3B – доступен, всем понятен, имеет массу возможностей и недорого стоит, есть простой программатор -https://real.kiev.ua/avreal/. Силовые транзисторы 6 штук IRG4BC30W выберем с некоторым запасом по току – пусковые токи АД могут превышать номинальные в 5-6 раз.
Получилась вот такая схема.
Я вовсе не претендую на законченность конструкции и предлагаю брать данную конструкцию за некую основу для энтузиастов домашнего электропривода. Приведённые здесь платы были сделаны под имеющиеся в моём распоряжении детали.
Конструктивно инвертор выполнен на двух платах – силовая часть ( блок питания , драйвер и транзисторы моста , силовые клеммы) и цифровая часть (микроконтроллер + индикатор ). Электрически платы соединены гибким шлейфом. Такая конструкция выбрана для перехода в будущем на контроллер TMS320 или STM32 или STM8.
Блок питания собран по классической схеме и в комментариях не нуждается. Микросхема IL300 линейная опто развязка для управления током 4-20Ма.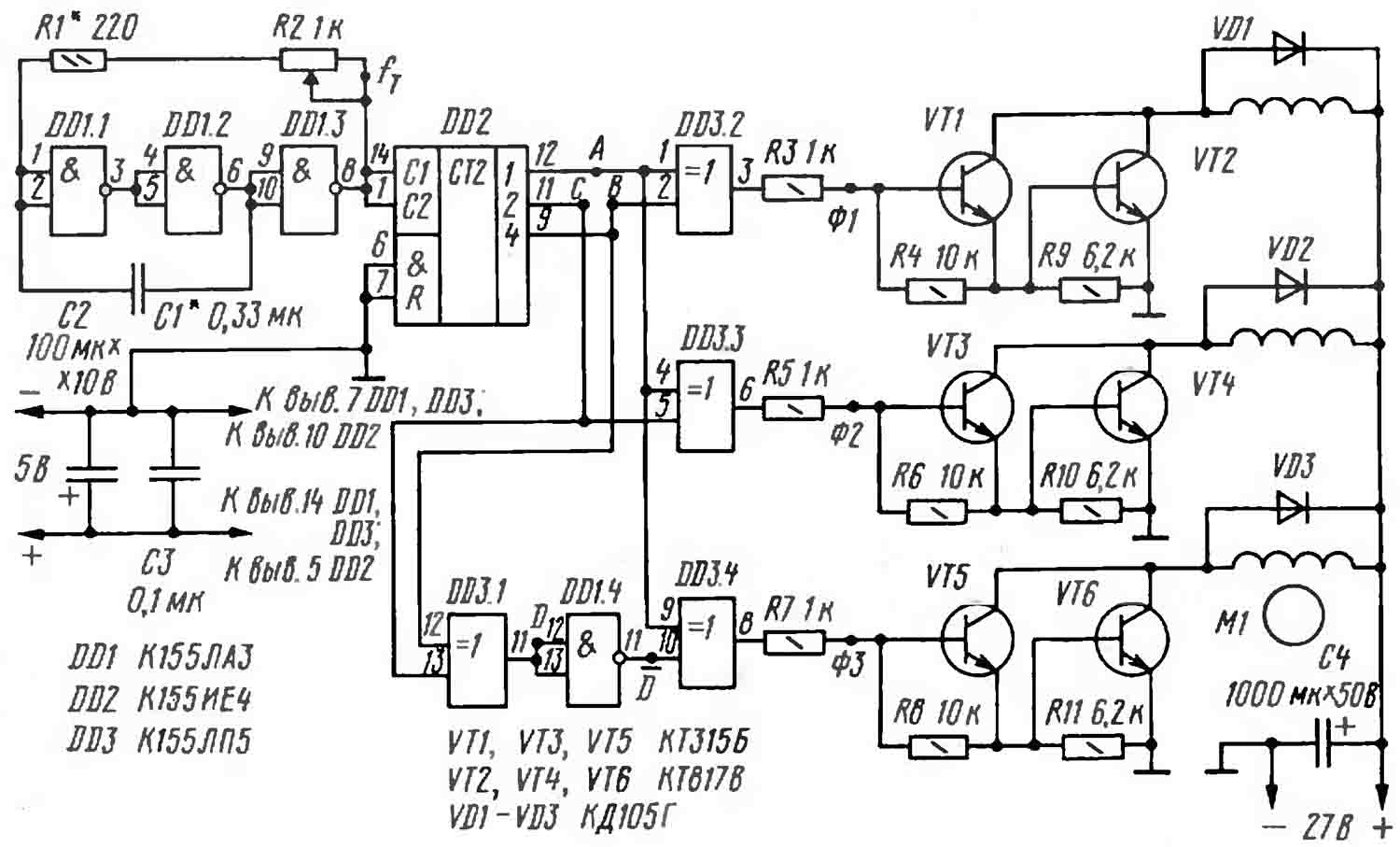 Оптроны ОС2-4 просто дублируют кнопки «старт, стоп, реверс» для гальванически развязанного управления. Выход оптрона ОС-1 «функция пользователя» (сигнализация и пр.)
Оптроны ОС2-4 просто дублируют кнопки «старт, стоп, реверс» для гальванически развязанного управления. Выход оптрона ОС-1 «функция пользователя» (сигнализация и пр.)
Силовые транзисторы и диодный мост закреплены на общий радиатор. Шунт 4 витка манганинового провода диаметром 0.5мм на оправке 3 мм.
ВАЖНО! – имеющиеся на плате кнопки управления изолированы от сети питания только пластмассовыми толкателями. Для безопасного управления необходимо использовать опторазвязку.
Возможные изменения в схеме в зависимости от микропрограммы.
Усилитель DA-1 можно подключать к трансформатору тока или к шунту. Усилитель DA-1-2 может быть использован для измерения напряжения сети или для измерения сопротивления терморезистора если не используется термодатчик PD-1.
Усилитель DA-1-2 может быть использован для измерения напряжения сети или для измерения сопротивления терморезистора если не используется термодатчик PD-1.
Так же считаю важным отметить проверку надёжности изоляции АД –т.к. при коммутации силовых транзисторов выбросы напряжение на обмотках могут достигать значений 1,3 Uпит.
Общий вид.
Немного про управление.
Начитавшись книжек с длинными формулами в основном описывающих как делать синусоиду при помощи PWM. И как стабилизировать скорость вращения вала двигателя посредством таходатчика и ПИД регулятора. Я пришёл к выводу –АД имеет достаточно жёсткую характеристику во всём диапазоне допустимых нагрузок на валу.
Поэтому для личных нужд вполне подойдет управление описанное законом Костенко М.
Основываясь на моих личных наблюдениях и скромном опыте именно эти методы без особых изысков чаще всего применяются в приводах мощностью до 15 кВт.
Далее не буду углубляться в теорию и описание мат моделей АД. Это и без меня достаточно хорошо изложили профессора ещё в 60-х.
Но ни в коем случае не стоит недооценивать сложности управления АД.
 Все мои упрощения оправданны только некоммерческим применением инвертора.
Все мои упрощения оправданны только некоммерческим применением инвертора.Плата силовых элементов.
В программе V-1.0 для AT90SPWM3B реализовано
1- Частотное управление АД .Форма напряжения синусоида с 3 гармоникой.
2- Частота задания 5 Гц -50 Гц с шагом 1 Гц. Частота ШИМ 4 кГц.
3- Фиксированное время разгона –торможения
4- Реверс (только через кнопку СТОП)
5- Разгон до заданной частоты с шагом 1 Гц
6 – Индикация показаний канала АЦП 6 (разрядность 8 бит., оконный фильтр апертура 4 бита)
я использую этот канал для замера тока шунта.
7 – Индикация режима работы START,STOP,RUN,RAMP, и Частота в Гц.
8- Обработка сигнала авария от мс IR2135
Торможение двигателя принудительное – без выбега. При этом нужно помнить – если на валу будет висеть огромный вентилятор или маховик то напряжение на звене постоянного тока может достичь опасных значений. Но я думаю вертолёты с приводом от АД строить никто не будет
Функции микропрограммы в будущих версиях
1 -намагничивание ротора перед пуском
2- торможение постоянным током
3 –прямой реверс
4 – частота задания 1 -400 Гц.
5 – ограничение, контроль тока двигателя.
6 – переключаемые зависимости U/F
7 – контроль звена постоянного тока.
8 – некоторые макросы управления –это вообще в далёких планах.
Испытания.
Данная конструкции была проверена с двигателем 0.18кВт и 0.4 кВт и 0.8 кВт. Все двигатели остались довольны.
Только при малых оборотах и долговременной работе необходимо принудительное охлаждение АД.
Строка для программатора
av_28r4.exe -aft2232 -az +90pwm3b -e -w -v -fckdiv=1,psc2rb=0,psc1rb=0,psc0rb=0,pscrv=0,bodlevel=5 -c01.hex
Небольшое “вечернее” видео испытаний
Файлы:
плата микроконтроллера -layout5.0
силовой модуль -layout5.0
Программа для МК
Схема
схема S_plan7 -архив rar
Все вопросы в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
Частотный преобразователь своими руками – RadioRadar
Частотный преобразователь применяется для того, чтобы из одной фазы получить три. Трехфазное питание используется, в основном, в промышленности. Однако и в бытовых ситуациях потребуется управление, например, трехфазным асинхронным двигателем. На этот случай вполне можно обойтись самостоятельным изготовлением частотника, что позволит использовать устройство с минимальными потерями мощности.
Трехфазное питание используется, в основном, в промышленности. Однако и в бытовых ситуациях потребуется управление, например, трехфазным асинхронным двигателем. На этот случай вполне можно обойтись самостоятельным изготовлением частотника, что позволит использовать устройство с минимальными потерями мощности.
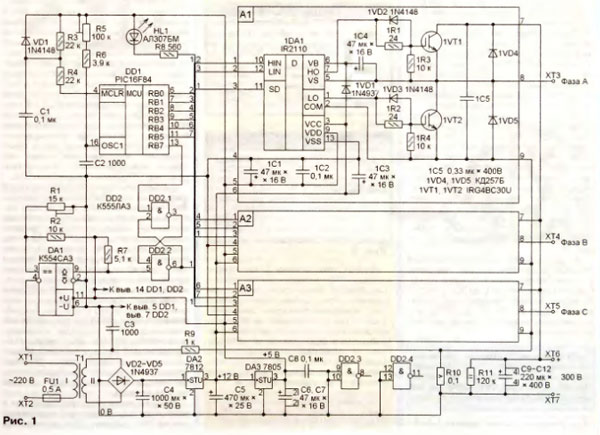
Существует много схем, которые дают возможность запустить трехфазный двигатель. Но, часть из них не предусматривает плавного включения или выключения, или же создают дополнительные неудобства, которые не дадут использовать двигатель полноценно. Исходя из этого, и были изобретены частотные преобразователи. Они позволяют полностью контролировать работу двигателя, при экономичном расходе электроэнергии и безопасности эксплуатации.
Рис. 1. Схема запуска трехфазного двигателя
Составляющие частотного преобразователя
Для наглядности, схему можно разбить на три составляющих или три взаимосвязанных блока:
1. Выпрямитель.
2. Фильтр, предназначение которого есть сглаживание напряжения на выходе.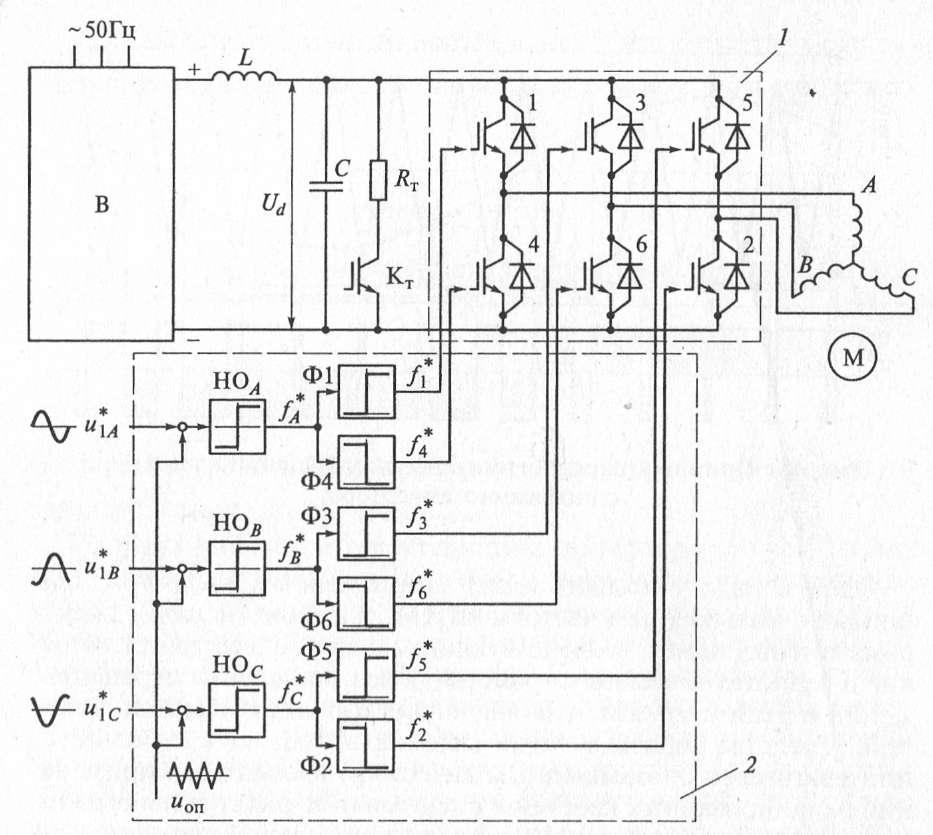
3. Инвертор, который собственно и отвечает за производство необходимой частоты.
Его использование дает значительное уменьшение пускового тока, при включении оборудования, что существенно продлевает эксплуатационный срок двигателя и устройства, где данный двигатель используется. Естественно, что избавившись таким образом от высоких показаний пускового тока, удается и сэкономить электроэнергию, которая уходила ранее при запуске оборудования. А это особенно актуально в условиях, где предусмотрены частые запуски и остановки устройств.
Рис. 2. Составляющие частотного преобразователя
Современные покупные инверторы широко используются в таких сферах, как производство, водоснабжение, энергетика, сельское и городское хозяйства, в электронике, и в автоматических линиях и комплексах.
Стоимость фирменного частотного преобразователя слишком высока, для того, чтобы изучить его процессы работы или использовать в быту или домашней мастерской. Поэтому часто используются в таких ситуациях самодельные частотники.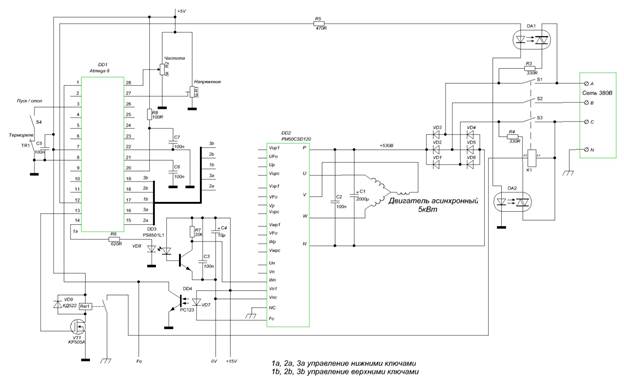
Сборка устройства
Стоит обратить внимание на то, что в домашних условиях крайне не рекомендуется использование двигателей, рассчитанных на мощность большую, чем 1 кВт. Таковы особенности домашней сети.
Имея необходимый двигатель, потребуется для начала соединить его обмотки между собой способом “треугольник”.
Рис. 3. Трёхфазный двигатель
Рис. 4. Соединение треугольник
Рис. 5. Соединение треугольник
Схема самого частотного преобразователя.
Рис. 6. Схема частотного преобразователя
Питание осуществляется от блока питания 27 Вольт постоянного напряжения. Это может быть, как регулируемый БП, так и сделанный собственноручно, рассчитанный на данное напряжение. Схема подключения двигателя;
Рис. 7. Схема подключения двигателя
Схема простая и проверенная и не содержит компонентов, которые сложно будет купить. Но, к сожалению, не лишена недостатков и годится для применения лишь в быту.
Более сложная в сборке схема, но и более результативная представлена ниже.
Рис. 8. Схема подключения двигателя
На данный момент это самая обсуждаемая схема частотного преобразователя, который можно сделать собственноручно. Прошивки микроконтроллера изобилуют на тематических форумах. Потребуется не только умение грамотно паять, но и прошивать микроконтроллеры.
Печатная плата.
Рис. 9. Печатная плата
Потребуется надежный источник питания на 24 Вольта. Предлагается его также изготовить собственноручно по схеме.
Рис. 10. Схема источника питания
Естественно, что устройство можно приобрести и готовым. Они бывают фирменными или сделанными народными мастерами, которые обладают положительными рекомендациями.
Автор: RadioRadar
частотный преобразователь своими руками, как сделать
Сегодня асинхронные двигатели являются основными тяговыми приводами для станков, конвейеров, и прочих промышленных агрегатов.
Для того чтобы моторы могли нормально функционировать, им нужен частотный преобразователь. Он позволяет оптимизировать работу агрегата и продлить срок его службы. Покупать устройство необязательно — частотник для трехфазного электродвигателя можно сделать своими руками.
Назначение частотного преобразователя
Асинхронный электродвигатель может работать и без частотника, но в этом случае у него будет постоянная скорость без возможности регулировки. К тому же отсутствие частотного преобразователя приведет к возрастанию пускового тока в 5−7 раз от номинального, что вызовет увеличение ударных нагрузок, повысит потери электроэнергии и приведет к существенному сокращению срока службы агрегата.
Для нивелирования всех вышеперечисленных негативных факторов были изобретены преобразователи частоты для асинхронных двигателей трехфазного и однофазного тока.
Частотник дает возможность в широких пределах регулировать скорость электродвигателя, обеспечивает плавный пуск, позволяет регулировать как скорость запуска, так и скорость торможения, подключать трехфазный мотор к однофазной сети и многое другое.
Принцип работы устройства
Переменный ток поступает из сети на диодный мост, где он выпрямляется и попадает на батарею сглаживающих конденсаторов, где окончательно превращается в постоянный ток, который поступает на стоки мощных IGBT транзисторов, управляемых главным контроллером. Истоки транзисторов, в свою очередь, подключены к двигателю.
Вот упрощенная схема преобразователя частоты для трехфазного асинхронного двигателя.
Теперь рассмотрим, что происходит с транзисторами и как они работают.
Полевой транзистор (он же ключ, мосфет и пр.) — это электронный выключатель, принцип его действия основан на возникновении проводимости между двумя выводами (сток и исток) мосфета, при появлении на управляющем выводе (затворе) напряжения, превышающего напряжение стока.
В отличие от обычных реле, ключи работают на очень высоких частотах (от нескольких герц до сотен килогерц) так что заменить их на реле не получится.
С помощью этих быстродействующих переключателей микроконтроллер получает возможность управления силовыми цепями.
К контроллеру, кроме мосфетов, также подключены датчики тока, органы управления частотником, и другая периферия.
При работе частотного преобразователя микроконтроллер измеряет потребляемую мощность и, в соответствии с установленными на панели управления параметрами, изменяет длительность и частоту периодов, когда транзистор открыт (включен) или закрыт (выключен), тем самым изменяя или поддерживая скорость вращения электродвигателя.
Самостоятельное изготовление прибора
Несмотря на множество агрегатов заводского производства, люди делают преобразователи частоты самостоятельно, благо на сегодняшний день все его компоненты можно купить в любом радиомагазине или заказать из Китая. Такой частотник обойдется вам значительно дешевле покупного, к тому же вы не будете сомневаться в качестве его сборки и надежности.
Делаем трехфазный преобразователь
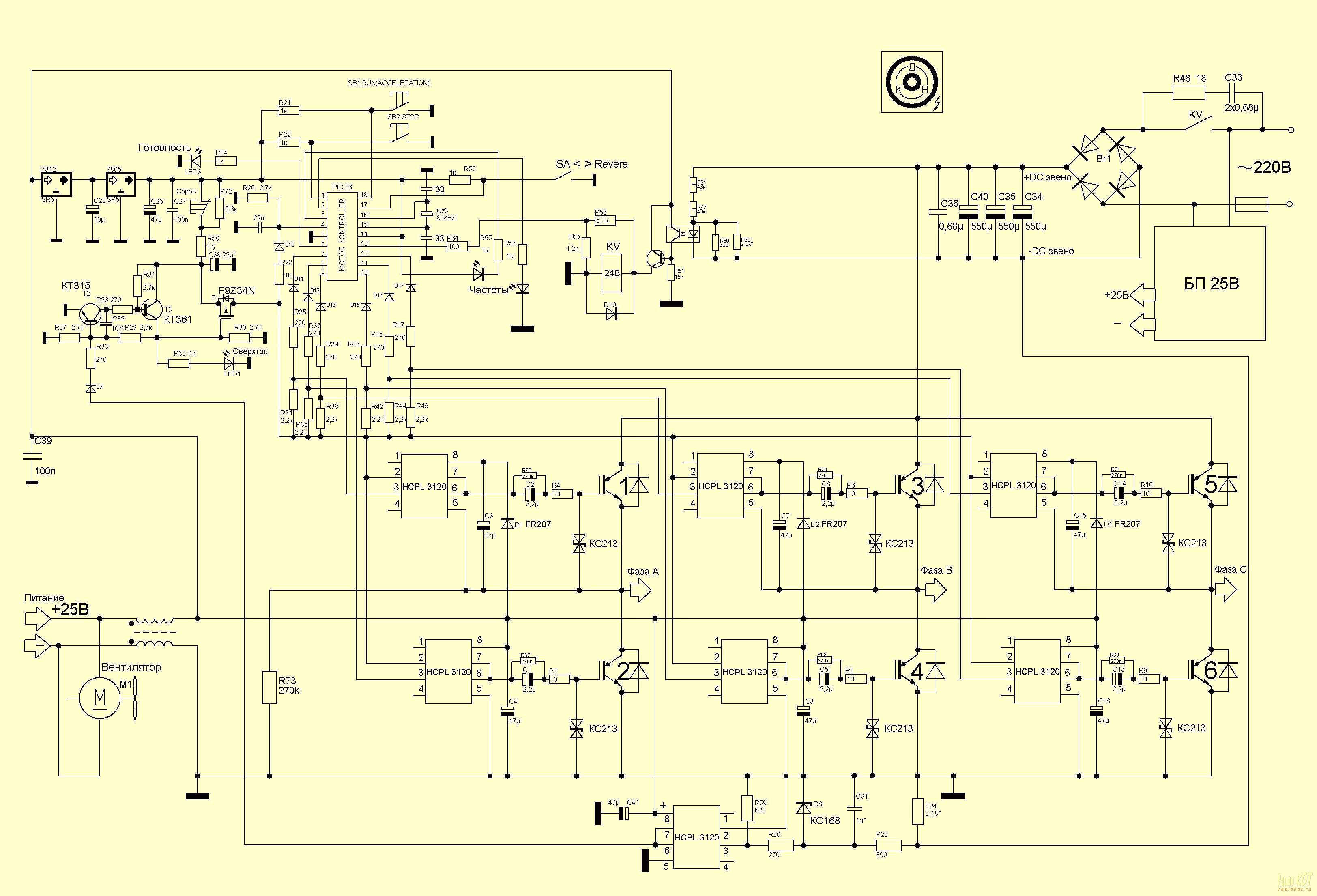
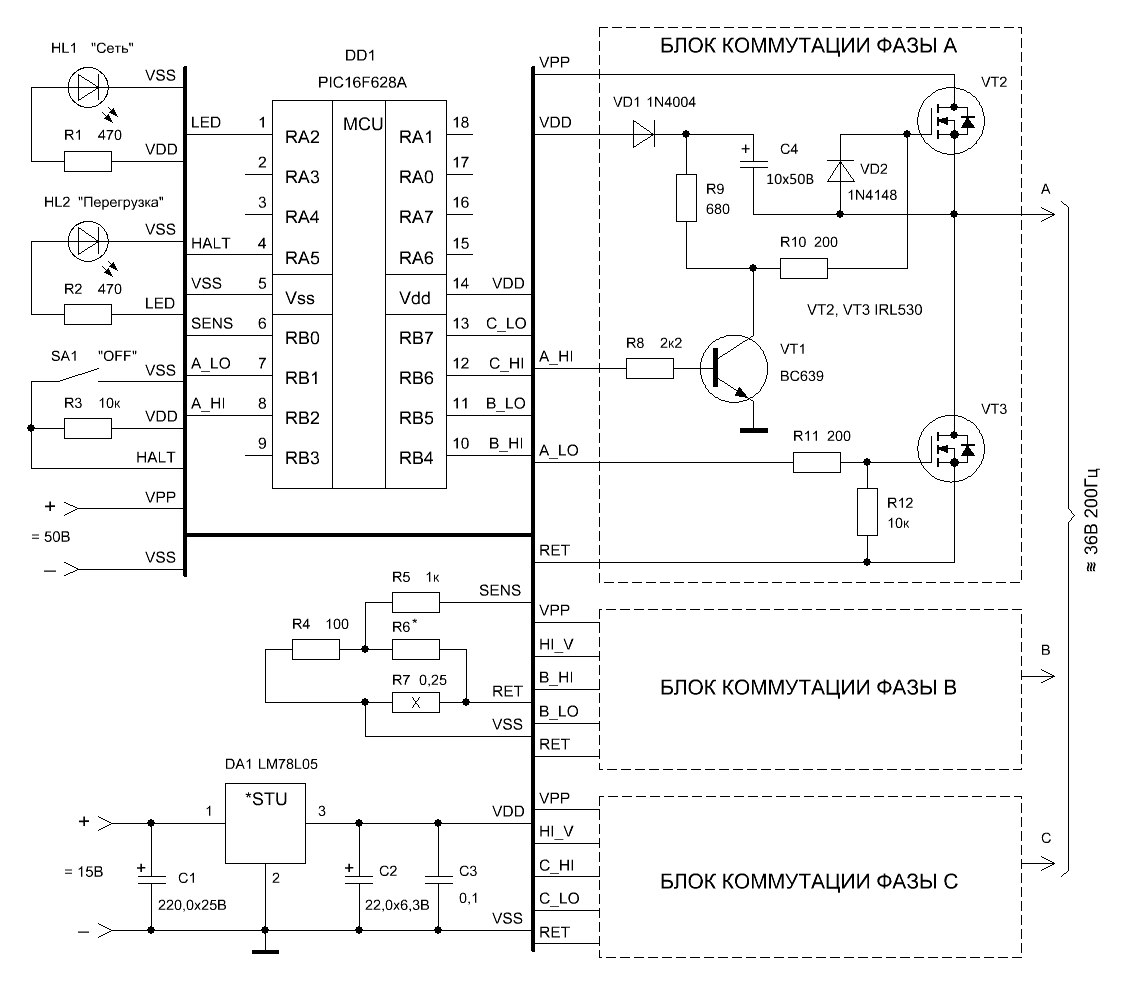
Собирать наш преобразователь будем на мосфетах G4PH50UD, которыми будет управлять контроллер PIC16F628A посредством оптодрайверов HCPL3120.
Собранный частотник при подключении в однофазную сеть 220 В будет иметь на выходе три полноценные фазы 220 В, со сдвигом 120°, и мощность 3 КВт.
Схема частотника выглядит так:
Так как частотный преобразователь состоит из частей, работающих как на высоком (силовая часть), так и на низком (управление) напряжении, то логично будет разбить его на три платы (основная плата, плата управления, и низковольтный блок питания для неё) для исключения возможности пробоя между дорожками с высоким и низким напряжением и выхода устройства из строя.
Вот так выглядит разводка платы управления:
Для питания платы управления можно использовать любой блок питания на 24 В, с пульсациями не более 1 В в размахе, с задержкой прекращения подачи питания на 2−3 секунды с момента исчезновения питающего напряжения 220 В.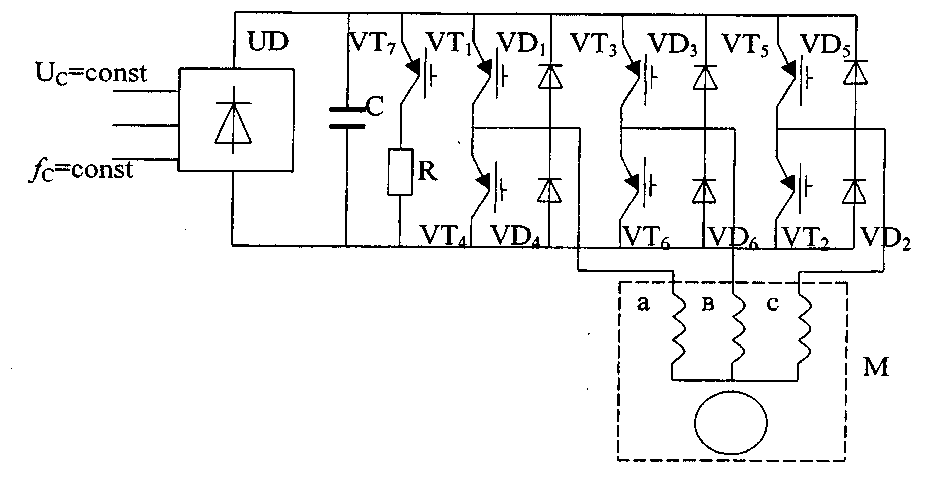
Блок питания можно собрать и самим по этой схеме:
Обратите внимание, что номиналы и названия всех радиокомпонентов на схемах уже подписаны, так что собрать по ним работающее устройство может даже начинающий радиолюбитель.
Перед тем как приступить к сборке преобразователя, убедитесь:
- В наличии у вас всех необходимых компонентов;
- В правильности разводки платы;
- В наличии всех нужных отверстий для установки радиодеталей на плате;
- В том, что не забыли залить в микроконтроллер прошивку из этого архива:
Если вы все сделали правильно и ничего не забыли, можете приступать к сборке.
После сборки у вас получится что-то похожее:
Теперь вам осталось проверить устройство: для этого подключаем двигатель к частотнику и подаем на него напряжение. После того как загорится светодиод, сигнализирующий о готовности, нажмите на кнопку «Пуск». Двигатель должен начать медленно вращаться. При удержании кнопки двигатель начинает разгоняться, при отпускании — поддерживает обороты на том уровне, до которого успел разогнаться. При нажатии кнопки «Сброс» двигатель останавливается с выбегом. Кнопка «Реверс» задействуется только при остановленном двигателе.
Двигатель должен начать медленно вращаться. При удержании кнопки двигатель начинает разгоняться, при отпускании — поддерживает обороты на том уровне, до которого успел разогнаться. При нажатии кнопки «Сброс» двигатель останавливается с выбегом. Кнопка «Реверс» задействуется только при остановленном двигателе.
Если проверка прошла успешно, то можете начинать изготавливать корпус и собирать в нем частотник. Не забудьте сделать в корпусе отверстия для притока холодного и оттока горячего воздуха от радиатора IGBT транзисторов.
Частотник для однофазного двигателя
Преобразователь частоты для однофазного двигателя отличается от трехфазного тем, что имеет на выходе две фазы (ошибки тут нет, двигатель однофазный, при подключении без частотника рабочая обмотка подключается в сеть напрямую, а пусковая — через конденсатор; но при использовании частотника пусковая обмотка подключается через вторую фазу) и одну нейтраль — в отличие от трех фаз у последнего, так что сделать частотник для однофазного электродвигателя, используя в качестве основы схему от трехфазного, не получится, поэтому придется начинать все сначала.
В качестве мозга этого преобразователя мы будем использовать МК ATmega328 с загрузчиком ардуины. В принципе, это и есть Arduino, только без своей обвязки. Так что, если у вас в закромах завалялась ардуинка с таким микроконтроллером, можете смело выпаивать его и использовать для дела, предварительно залив на него скетч (прошивку) из этого архива:
К атмеге будет подключен драйвер IR2132, а уже к нему — мосфеты IRG4BC30, к которым мы подключим двигатель мощностью до 1 КВт включительно.
Схема частотного преобразователя для однофазного двигателя:
Также для питания ардуины (5в) и для питания силового реле (12в), нам понадобятся 2 стабилизатора. Вот их схемы:
Стабилизатор на 12 вольт.
Стабилизатор на 5 вольт.
Внимание! Эта схема не из простых. Возможно, придется настраивать и отлаживать прошивку для достижения полной работоспособности устройства, но это несложно, и мануалов по программированию Arduino в интернете — великое множество. К тому же сам скетч содержит довольно подробные комментарии к каждому действию. Но если для вас это слишком сложно, то вы можете попробовать найти такой частотник в магазине. Пусть они и не так распространены, как частотники для трехфазных двигателей, но купить их можно, пусть и не в каждом магазине.
К тому же сам скетч содержит довольно подробные комментарии к каждому действию. Но если для вас это слишком сложно, то вы можете попробовать найти такой частотник в магазине. Пусть они и не так распространены, как частотники для трехфазных двигателей, но купить их можно, пусть и не в каждом магазине.
Еще обратите внимание на то, что включать схему без балласта нельзя — сгорят выходные ключи. Балласт нужно подключать через диод, обращенный анодом к силовому фильтрующему конденсатору. Если подключите балласт без диода — опять выйдут из строя ключи.
Если вас все устраивает, можете приступать к изготовлению платы, а затем — к сборке всей схемы. Перед сборкой убедитесь в правильности разводки платы и отсутствии дефектов в ней, а также — в наличии у вас всех указанных на схеме радиодеталей. Также не забудьте установить IGBT-транзисторы на массивный радиатор и изолировать их от него путем использования термопрокладок и изолирующих шайб.
После сборки частотника можете приступать к его проверке. В идеале у вас должен получиться такой функционал: кнопка «S1» — пуск, каждое последующее нажатие добавляет определенное (изменяется путем редактирования скетча) количество оборотов; «S2» — то же самое, что и «S1», только заставляет двигатель вращаться в противоположном направлении; кнопка «S3» — стоп, при её нажатии двигатель останавливается с выбегом.
В идеале у вас должен получиться такой функционал: кнопка «S1» — пуск, каждое последующее нажатие добавляет определенное (изменяется путем редактирования скетча) количество оборотов; «S2» — то же самое, что и «S1», только заставляет двигатель вращаться в противоположном направлении; кнопка «S3» — стоп, при её нажатии двигатель останавливается с выбегом.
Обратите внимание, что реверс осуществляется через полную остановку двигателя, при попытке сменить направление вращения на работающем двигателе произойдет его мгновенная остановка, а силовые ключи сгорят от перегрузки. Если вам не жаль денег, которые придется потратить на замену мосфетов, то можете использовать эту особенность в качестве аварийного тормоза.
Возможные проблемы при проверке
Если при проверке частотника схема не заработала или заработала неправильно, значит, вы где-то допустили ошибку. Отключите частотник от сети и проверьте правильность установки компонентов, их исправность и отсутствие разрывов/замыканий дорожек там, где их быть не должно. После обнаружения неисправности устраните её и проверьте преобразователь снова. Если с этим все в порядке, приступайте к отладке прошивки.
После обнаружения неисправности устраните её и проверьте преобразователь снова. Если с этим все в порядке, приступайте к отладке прошивки.
Преобразователь частоты: тиристорный, высоковольтный, обзор цен
Для стабилизации электрического тока используются различные устройства. Предлагаем рассмотреть, что такое электромашинный преобразователь частоты, как работает высоковольтный, тиристорный и однофазный прибор, его назначение, где можно купить, а также схема, как его сделать своими руками.
Общая информация
Простейший преобразователь напряжения тока или частоты (ПЧ) – это электромагнитный, электронный или электромеханический прибор, который преобразует переменный ток одной частоты в переменный ток другой. Устройство может также изменить напряжение, но для этого необходимо использовать специальные настройки и компоненты. На нашем рынке они представлены такими марками и типами как CSACS550, ACS800, Aqua, ATV, ATV312, ATV61, CIMR, Commander, Control, Cue, Drive, F740, Fdu40, Frenic, Frn, Fuji, Hvac, IC5, Innovert, Keb, L100, L200, L300p, Matlab, Micromaster, Mini, N100, N50, N700e, Nxs, Pr6000, Prostar, S11, Schneider, Sinamics, Smd, Unidrive, Vector, Vfs11, Winner, Yaskawa.
Преобразователь напряжение-частота широко используется для того, чтобы сохранить энергию механических систем, к примеру, двигателя, насоса, вентилятора и т.д. Выбираются приборы в соответствии с кривыми двигателя для обеспечения оптимальной скорости и нагрузки, транзисторный преобразователь может помочь сэкономить энергию двигателя, снижая потери энергии и увеличивая КПД. Это достигается путем преобразования фиксированной частоты входящего переменного тока напряжения в постоянный ток, а затем, варьируя частоту переконвертировать его обратно в переменное напряжение, используя биполярные транзисторы с изолированным затвором (IGBT).
Бывают преобразователи высокой частоты таких видов:
- Работающие при помощи звена постоянного тока;
- Работающие с непосредственной связью.
В основном используется первый тип электропривода, т.к. он обеспечивает двойное преобразование частоты вращения двигателя, при этом контролируется как вход сигнала, так и выход. Рассмотрим подробнее их принцип действия.
Рассмотрим подробнее их принцип действия.
Принцип работы и характеристики
Преобразователь частоты для асинхронных двигателей работает путем преобразования входного синусоидального напряжения переменного тока в напряжение постоянного тока, а затем его изменения обратно в переменное напряжение. Это преобразование происходит с помощью либо кремниевых выпрямителей или IGBT-транзисторов.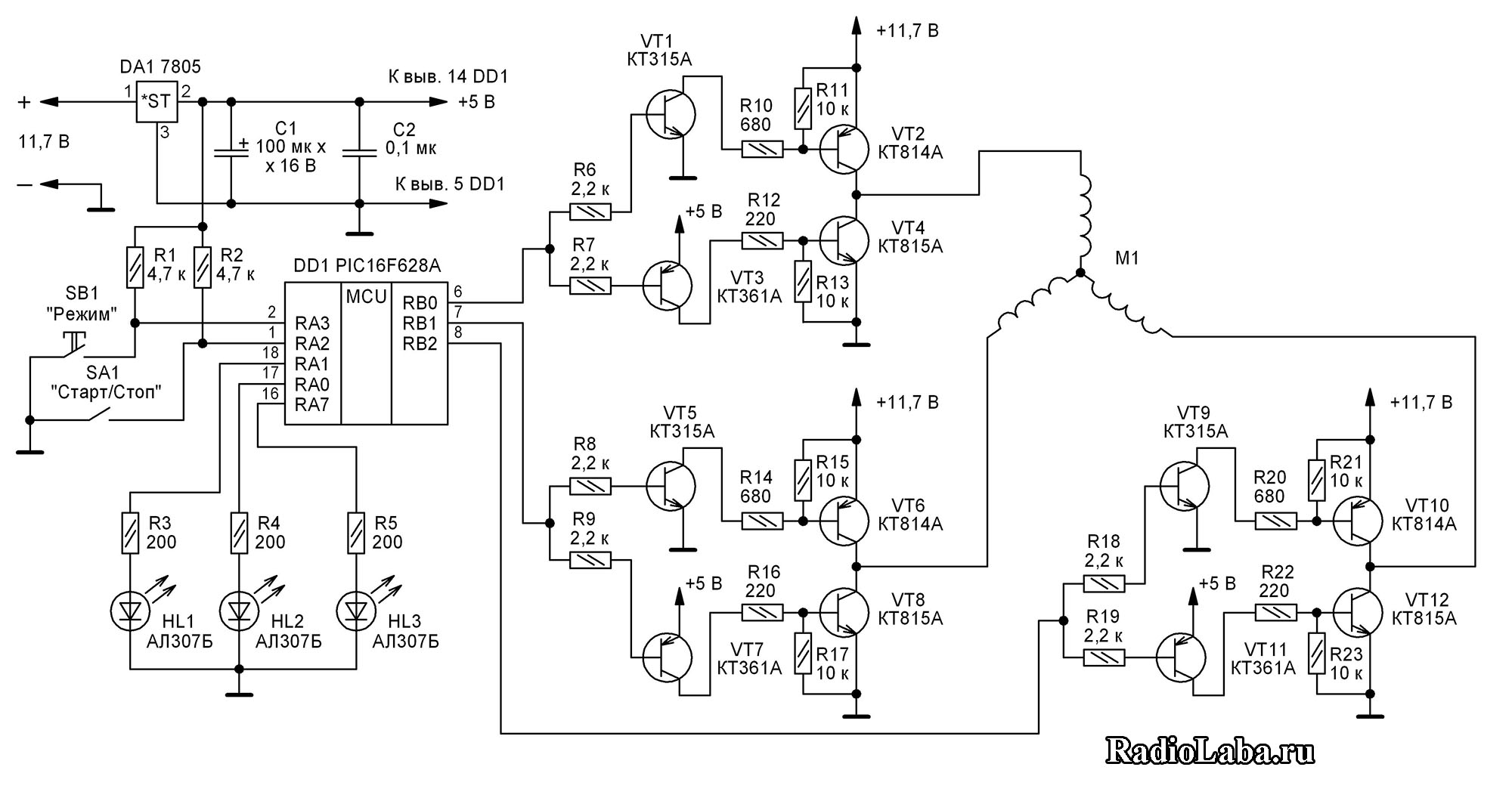 Напряжение постоянного тока включается с помощью транзисторов для создания постоянного выходного напряжения переменного тока (так называемый инвертор). Транзисторы могут включать и выключать питание, чтобы создать нужное напряжение сигнала тока, который обеспечивает питание двигателя. Частота, на которой происходит переключение (несущая), варьируется в зависимости от серии и компании, которой изготовлен преобразователь напряжения и частоты (Vacon, Mitsubishi, Toshiba, Altivar, FDU, Danfoss – Данфосс, Delta Hyundai, Emotron, ABB, Lenze, Hitachi, Siemens, Omron, Electric и т.д.)
Напряжение постоянного тока включается с помощью транзисторов для создания постоянного выходного напряжения переменного тока (так называемый инвертор). Транзисторы могут включать и выключать питание, чтобы создать нужное напряжение сигнала тока, который обеспечивает питание двигателя. Частота, на которой происходит переключение (несущая), варьируется в зависимости от серии и компании, которой изготовлен преобразователь напряжения и частоты (Vacon, Mitsubishi, Toshiba, Altivar, FDU, Danfoss – Данфосс, Delta Hyundai, Emotron, ABB, Lenze, Hitachi, Siemens, Omron, Electric и т.д.)
Статический трехфазный ПЧ имеет шесть диодов в качестве мостового выпрямителя переднего плана, которые преобразуют переменный ток в постоянный. ПЧ может также иметь 12 диодов — два комплекта на фазу (2 × 2 × 3 = 12 импульсов), или 18 диодов — три набора на фазу (3 × 2 × 3 = 18 импульсов) и т.д. Один набор диодов подается от трансформатора дельта, чтобы создать фазовый сдвиг на стороне источника переменного тока между двумя выпрямителями, чем уменьшить гармонику и отразить сигнал назад к входу напряжения.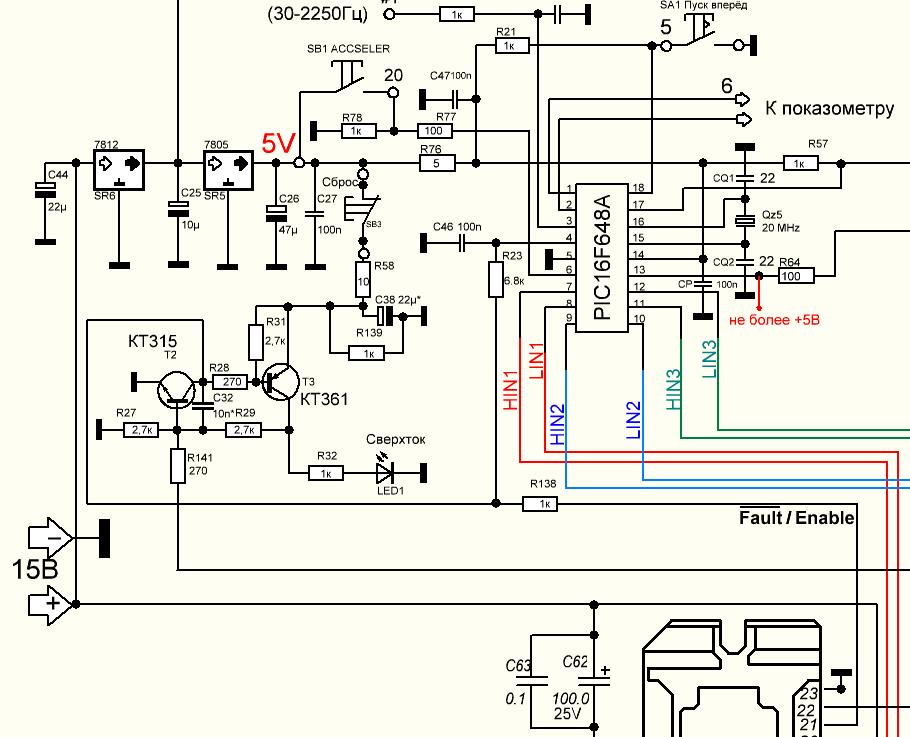
- 6-диодный преобразователь наиболее часто используется в строительной сфере. Суммарный коэффициент гармонических искажений, отраженный обратно к источнику, может быть выше, чем поступающий на входящие контакты. Вы можете установить встроенную катушку индукционного типа, чтобы уменьшить отражение гармоника обратно в точку сцепления. ПЧ снижает искажение тока в источнике.
- 12-импульсный преобразователь повышенной частоты (его еще называют, плавный) может отменить отражение гармоник обратно к источнику. Фазы сдвига трансформатора могут быть настроены для уменьшения гармонических искажений на входных клеммах.
- 18-импульсный силовой преобразователь использует как синхронный, так и асинхронный двигатель. Он обеспечивает низкий уровень гармонических искажений в электрической сети, благодаря поэтапной отмене первичных гармоник (5-м и 7-м) и гармоник высокого порядка, которые могут привести к резонансу на емкостных и индуктивных нагрузках (например, фильтрах, трансформаторах и т.
 д.). Их стоимость зачастую очень высокая, поэтому используются они только в производственных цехах. КНИ на входных клеммах может быть менее 5%, поэтому ниже общее напряжение гармонических искажений будет реализовано в источнике, в зависимости от схемы импеданса. Часто этот прибор цифровой, что значительно облегчает работу с ним.
д.). Их стоимость зачастую очень высокая, поэтому используются они только в производственных цехах. КНИ на входных клеммах может быть менее 5%, поэтому ниже общее напряжение гармонических искажений будет реализовано в источнике, в зависимости от схемы импеданса. Часто этот прибор цифровой, что значительно облегчает работу с ним.
Основные характеристики:
- Напряжение – 220-480 В;
- Защита Ip54;
- Температурный барьер для нормальной работы – от +10 до -40 градусов;
- Мощность – от 1 кВт.
Также существует двухзвенный преобразователь (ТТПТ, ТОШИБА, УХЛ4, ТПЧ, ТРИОЛ), матричный и векторный прибор, он состоит из ПЧ переменного тока и напряжения для создания нужной амплитуды. Обеспечивает пуск в течение 2 секунд от включения, дорогой, в последнее время теряет свою актуальность.
Этот ПЧ выполнен коммутацией естественного типа, оснащен отдельным источником напряжения с повышенной частотой. У него достаточно узкий круг использования, в основном это городские или квартальные электростанции.
В зависимости от области использования, нужно выбрать оптимальный преобразователь, иначе Вы не только переплатите за устройство, но и можете подвергнуть опасности жизни своих близких и работников.
Обязательно перед покупкой должна быть прочитана документация, проверена мощность и пропускные способности. Настройка и сборка преобразователей может производиться продавцом-консультантом непосредственно на месте покупки.
Фото — Двухзвенный преобразовательДля чего нужен преобразователь: для подключения и работы лифтов (ПЧВН, ППЧВ), регулировки частоты станочного двигателя (к примеру, VLT, VFD), автомобильного мотора (Мицубиси, Opel Omega – Омега) и т.д.
Описание самостоятельного подключения
Предлагаем рассмотреть, как можно самому собрать и подключить простой самодельный инверторный преобразователь частоты для небольшого трехфазного электродвигателя в виде подробной инструкции.
Рассмотрим создание ПЧ на примере двигателя с частотой 400Гц и напряжением электрической сети 27 Вольт. Обмотки соединены в звезду, благодаря чему средняя точка каждой выведена наружу, это позволяет существенно упростить микросхему: нужно три выходных сигнала, и один выходной ключ на каждую из фаз. Электрическая схема подключения показана на фото ниже:
Обмотки соединены в звезду, благодаря чему средняя точка каждой выведена наружу, это позволяет существенно упростить микросхему: нужно три выходных сигнала, и один выходной ключ на каждую из фаз. Электрическая схема подключения показана на фото ниже:
Данное устройство состоит из таких компонентов: генератор, формирующий импульсы, ключи на составных транзисторах и электрического двигателя.
Фото — Частотный преобразователь схема 1Руководство, по которому можно подключить преобразователь частоты двигателя, имеет вид упрощенной схемы. На чертеже изображен двигатель, который управляется несколькими ключами. Механические контакты показаны как элементы полупроводникового типа. Питается двигатель при помощи постоянного напряжения. Естественно нельзя одновременно открывать нижние и верхние ключи, иначе произойдет короткое замыкание, и мощность ВПЧ потока упадет до нуля, чтобы это предотвратить, нужно подключить преобразователь таким образом, чтобы при открытии нижнего ключа верхний закрывался. Для осуществления такой технологии используются специальные контроллеры, образующие мертвую зону.
Для осуществления такой технологии используются специальные контроллеры, образующие мертвую зону.
Временной интервал для мертвой зоны нужно рассчитать таким образом, чтобы гарантировать успешное закрытие всех транзисторов верхнего ряда, только тогда вероятность образования сквозных токов будет сведена к минимуму.
Ключами с гальванической связью управляет драйвер на составном резисторе, для этого часто устанавливают дополнительный оптрон для каждого ключа или канала (как и показано на схеме), эта деталь на данном чертеже выполняет роль еще одного инвертора.
Чтобы питать каждый драйвер, нужно использовать специальный выпрямитель, который в свою очередь, запитан от обмотки привода. Возможно, это является одним из недостатков схемы. Для управления длительности мертвой зоны данный преобразователь напряжения и частоты использует конденсатор.
Этот прибор относится к типу универсал, его можно подсоединять к любым двигателям, мощность которые не превышает 10 кВт.
Ремонт и обслуживание
Если ПЧ не работает на полную мощность, то рекомендуем проверить тормозной резистор для преобразователя частоты, в таблице ниже даны оптимальные показатели.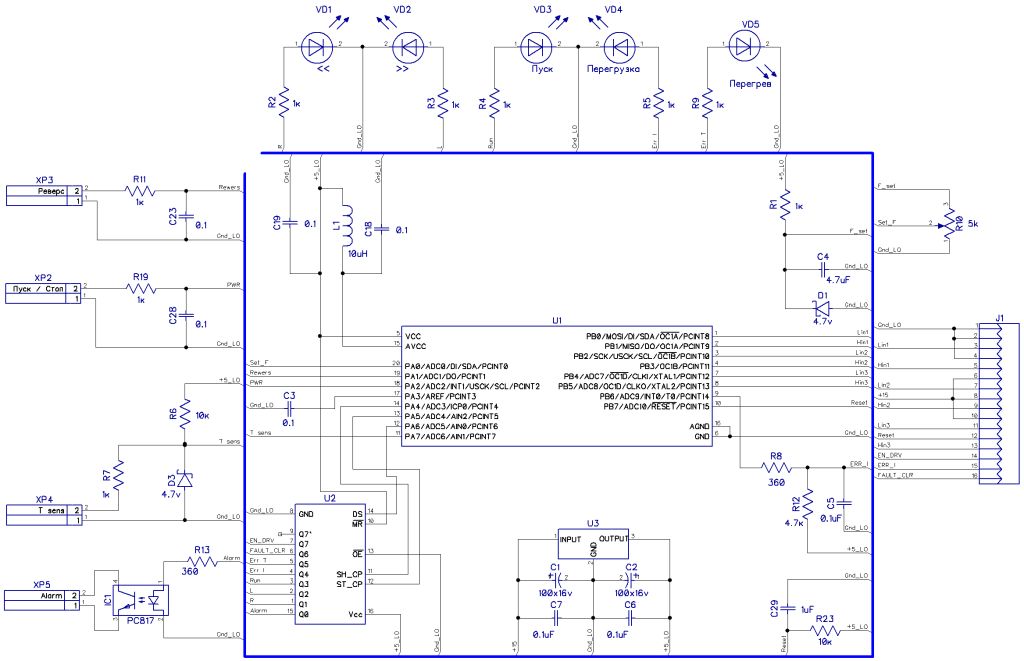 В том случае, если данные Вашей детали не совпадают с ними, то необходима замена резистора:
В том случае, если данные Вашей детали не совпадают с ними, то необходима замена резистора:
Система может дать сбой, если Вы выбрали очень мощный ПЧ для слабой сети. Дело в том, что большинство деталей преобразователя предназначено для постоянного напряженного состояния, если уровень сигнала не доходит до минимальных показателей ПЧ, то он не будет работать.
Есть два варианта:
- Техническое испытание;
- Проверка схемы выпрямления.
Также можно попробовать поискать проблемы своими силами, при помощи мультиметра:
- Проверьте уровень сигнала, если на преобразователе написано, что необходимо напряжении в 380 Вольт, а подается только 220 – то работать прибор не будет;
- Проверьте правильность подключения преобразователя к порту и плотность всех прочих соединений;
- В процессе эксплуатации, преобразователь напряжения и частоты нельзя подвергать воздействию воды и резким перепадам температуры;
- На цифровых приборах есть возможность вывести причину поломки на экран, производитель указывает как вызвать эту функцию в инструкции;
- Проверьте напряжение, не должно быть разрывов или сильных перепадов.

Преобразователи частоты. Видео
В этом разделе можно познакомиться с видеоматериалами по преобразователям частоты, представленными на нашем сайте. Надеемся, что инструкции по настройке частотных преобразователей, информация по функциональным особенностям конкретных моделей и примеры применения данного оборудования в различных сферах будут вам полезны. Если у вас есть интересные видоматериалы по данной тематике, мы готовы разместить их в этом разделе со ссылкой на первоисточник
Обзор принципов работы преобразователей частоты (инверторов). Рассматривается структура, принцип работы скалярных преобразователей частоты, а также схема самодельного ПЧ.
Многофункциональные и универсальные в использовании преобразователи частоты Innovert отличаются удобными и простыми настройками, надежностью и долговечностью. Установка оборудования данного бренда позволяет стабилизировать работу силовых агрегатов различных систем и сэкономить на расходе электроэнергии.
Преобразователь сетевого напряжения 220В в трехфазное напряжение для питания трехфазных двигателей. Или три фазы в доме.
К новым полностью управляемым полупроводниковым приборам относятся биполярные транзисторы с изолированным затвором (IGBT) и запираемые тиристоры с комбинированным управлением. На их основе стало возможным создание преобразователей частоты для питания двигателей переменного тока и плавного регулирования их скорости вращения. В данном разделе будут рассмотрены характеристики новых силовых полупроводниковых приборов и приведены их параметры.
На их основе стало возможным создание преобразователей частоты для питания двигателей переменного тока и плавного регулирования их скорости вращения. В данном разделе будут рассмотрены характеристики новых силовых полупроводниковых приборов и приведены их параметры.
Преобразователи частоты Delta Electronics способны эффективно управлять частотой вращения двигателя, улучшить машинную автоматизацию и экономить электроэнергию. В номенклатуру инверторов Delta Electronics входят серии экономичных и компактных частотников, универсальных общепромышленных и ряд частотников для специализированных применений (лифтов, насосов и вентиляторов).
Преобразователи частоты серии Frenic Multi предназначены для решения широкого спектра задач в различных отраслях промышленности.
Обладают высокой функциональностью,что позволяет использовать их для решения широкого спектра задач. Эта серия оснащена специализированными функциями ограничения момента и ограничения тока.
Серия общепромышленных преобразователей частоты Frenic Mega, вобравшая в себя все последние достижения фирмы Fuji Electric в области приводной техники, разработанная для широкого спектра задач. Высокая точность, динамика, возможность позиционирования и синхронизации позволит решить любые задачи управления.
Высокая точность, динамика, возможность позиционирования и синхронизации позволит решить любые задачи управления.
Наиболее эффективным способом регулирования скорости асинхронного двигателя является изменение частоты и амплитуды трехфазного напряжения, прикладываемого к обмоткам асинхронного двигателя. Этот способ регулирования в последние годы получил самое широкое применение для электроприводов различного назначения, как низковольтных с напряжением до 400 В, так и высоковольтных большой мощности напряжением 6,0 и 10,0 кВ.
Применение преобразователей частоты в жилищно-коммунальных хозяйствах. Применение частотных преобразователей позволит снизить финансовые издержки на оплату электроэнергии в коммунальном хозяйстве, а следовательно, обеспечит стабильные тарифы на тепловую энергию, водоснабжение для населения страны.
Применение частотных преобразователей позволит снизить финансовые издержки на оплату электроэнергии в коммунальном хозяйстве, а следовательно, обеспечит стабильные тарифы на тепловую энергию, водоснабжение для населения страны.
Цепь однофазного частотно-регулируемого привода
VFD
В посте обсуждается однофазная схема частотно-регулируемого привода или схема частотно-регулируемого привода для управления скоростью двигателя переменного тока, не влияя на их рабочие характеристики.
Что такое VFD
Двигатели и другие подобные индуктивные нагрузки особенно не «любят» работу с частотами, которые могут выходить за рамки их производственных спецификаций, и, как правило, становятся неэффективными, если вынуждены делать это в таких ненормальных условиях.
Например, двигатель, предназначенный для работы с частотой 60 Гц, не может быть рекомендован для работы с частотами 50 Гц или другими диапазонами.
Это может привести к нежелательным результатам, таким как нагрев двигателя, более низкие или высокие скорости, чем требуемые, и аномально высокое потребление, что делает вещи очень неэффективными и снижает срок службы подключенного устройства.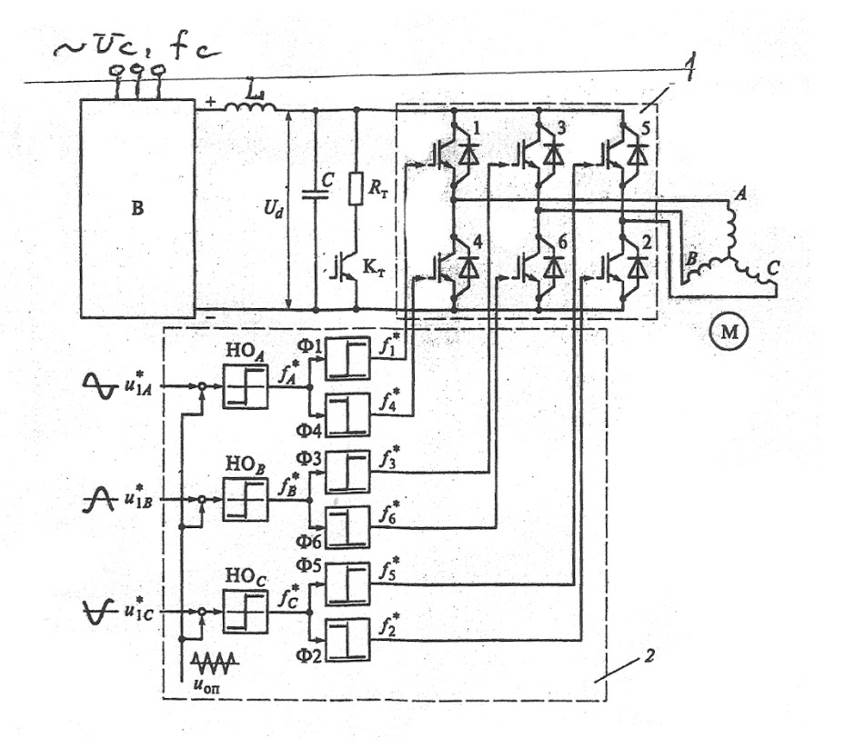
Однако работа двигателей при различных условиях входной частоты часто становится вынужденной, и в таких ситуациях частотно-регулируемый привод или схема привода переменной частоты могут стать очень удобными.
VFD – это устройство, которое позволяет пользователю управлять скоростью двигателя переменного тока, регулируя частоту и напряжение входного источника питания в соответствии со спецификациями двигателя.
Это также означает, что частотно-регулируемый привод позволяет нам управлять любым двигателем переменного тока через любую доступную сеть переменного тока, независимо от его характеристик напряжения и частоты, путем соответствующей настройки частоты и напряжения частотно-регулируемого привода в соответствии со спецификациями двигателя.
Обычно это делается с использованием данного элемента управления в виде регулируемой ручки, масштабируемой с помощью другой калибровки частоты.
Изготовление ЧРП в домашних условиях может показаться сложной задачей, однако взгляд на конструкцию, предложенную ниже, показывает, что, в конце концов, собрать это очень полезное устройство (разработанное мной) не так уж и сложно.
Схема может быть принципиально разделена на два этапа: этап полубигового драйвера и этап логического генератора ШИМ.
В каскаде драйвера полумоста используется микросхема драйвера полумоста IR2110, которая в одиночку заботится о каскаде высоковольтного двигателя, включая два МОП-транзистора с высокой и низкой стороны соответственно.
Таким образом, микросхема драйвера является сердцем схемы, но для реализации этой важной функции требуется всего несколько компонентов.
Однако вышеуказанная ИС потребует высокой логики и низкой логики по частотам для управления подключенной нагрузкой на желаемой конкретной частоте.
Эти входные логические сигналы высокого и низкого уровня становятся рабочими данными для ИС драйвера и должны включать сигналы для определения заданной частоты, а также ШИМ в фазе с сетевым переменным током.
Приведенная выше информация создается другим каскадом, состоящим из пары 555 микросхем и декадного счетчика. IC 4017.
IC 4017.
Две микросхемы 555 отвечают за генерацию модифицированных синусоидальных ШИМ, соответствующих двухполупериодной выборке переменного тока, полученной с выхода понижающего мостового выпрямителя.
IC4017 функционирует как генератор логической схемы на выходе тотемного полюса, чья переменная частота становится параметром, определяющим ОСНОВНУЮ частоту схемы.
Эта определяющая частота снимается с вывода №3 IC1, который также питает вывод запуска IC2, и для создания модифицированных ШИМ на выводе №3 IC2.
Модифицированные синусоидальные ШИМ сканируются на выходах микросхемы 4017 перед подачей на IR2110, чтобы наложить точную «печать» модифицированных ШИМ на выходе драйвера полумоста и, в конечном итоге, для двигателя, который работает.
Cx и значения потенциометра 180k должны быть соответствующим образом выбраны или отрегулированы, чтобы обеспечить правильную заданную частоту для двигателя.
Высокое напряжение на стоке МОП-транзистора высокого напряжения также должно быть рассчитано соответствующим образом и получено путем выпрямления доступного переменного напряжения сети после соответствующего повышения или понижения в соответствии со спецификациями двигателя.
Приведенные выше настройки определяют правильное значение вольт на герц (В / Гц) для конкретного двигателя.
Питающее напряжение для обеих ступеней может быть объединено в общую линию, то же самое для заземления.
TR1 – понижающий трансформатор 0–12 В / 100 мА, который обеспечивает схемы требуемыми рабочими напряжениями питания.
Схема ШИМ-контроллера
Вам нужно будет соответствующим образом интегрировать выходы IC 4017 из вышеприведенной схемы на входы HIN и LIN на следующей схеме.Кроме того, подключите указанные диоды 1N4148 на приведенной выше схеме с затворами MOSFET нижнего уровня, как показано на схеме ниже.
Драйвер двигателя полного моста
Обновление:
Обсуждаемая выше простая конструкция с одним VFD может быть дополнительно упрощена и улучшена с помощью автоколебательной полной мостовой ИС IRS2453, как показано ниже:
Здесь IC 4017 полностью устранены, поскольку драйвер полного моста оснащен собственным каскадом генератора, и поэтому для этой ИС не требуется внешний запуск.
Будучи полностью мостовой конструкцией, выходной регулятор двигателя имеет полный диапазон регулировки от нуля до максимальной скорости.
Гнездо на выводе № 5 микросхемы IC 2 может использоваться для управления скоростью и крутящим моментом двигателя с помощью метода ШИМ.
Для управления скоростью В / Гц Rt / Ct, связанные с IRS2453 и R1, связанные с IC1, могут быть соответственно настроены (вручную) для получения подходящих результатов.
Упрощение еще больше
Если вы обнаружите, что полная секция моста перегружает вас, вы можете заменить ее полной мостовой схемой на основе P, N-MOSFET, как показано ниже.Этот драйвер переменной частоты использует ту же концепцию, за исключением секции драйвера полного моста, в которой используются полевые МОП-транзисторы с каналом P на верхней стороне и полевые МОП-транзисторы с N-каналом на нижней стороне.
Хотя конфигурация может выглядеть неэффективной из-за использования полевых МОП-транзисторов с P-каналом (из-за их высокого рейтинга RDSon), использование множества параллельных полевых МОП-транзисторов с P-каналом может показаться эффективным подходом для решения проблемы низкого уровня RDSon.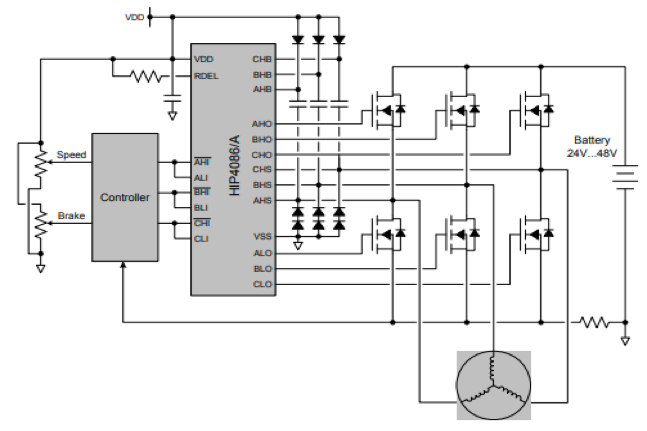
Здесь 3 полевых МОП-транзистора используются параллельно для устройств с P-каналом, чтобы обеспечить минимальный нагрев устройств, наравне с N-канальными аналогами.
О Swagatam
Я инженер-электронщик (dipIETE), любитель, изобретатель, разработчик схем / печатных плат, производитель. Я также являюсь основателем веб-сайта: https://www.homemade-circuits.com/, где я люблю делиться своими инновационными идеями и руководствами по схемам.
Если у вас есть какие-либо вопросы, связанные со схемой, вы можете взаимодействовать с ними через комментарии, я буду очень рад помочь!
Как сделать трехфазную схему частотно-регулируемого привода
Представленная трехфазная схема частотно-регулируемого привода (модель , разработанная мной, ) может использоваться для управления скоростью любого трехфазного электродвигателя переменного тока с щеткой или даже бесщеточного электродвигателя переменного тока.Идея была предложена г-ном Томом
Использование частотно-регулируемого привода
Предложенная трехфазная схема частотно-регулируемого привода может универсально применяться для большинства трехфазных двигателей переменного тока, где эффективность регулирования не слишком критична.
Его можно специально использовать для управления скоростью асинхронного двигателя с короткозамкнутым ротором в режиме разомкнутого контура и, возможно, также в режиме замкнутого контура, который будет обсуждаться в более поздней части статьи.
Модули, необходимые для 3-фазного инвертора
Для проектирования предлагаемой схемы трехфазного частотно-регулируемого привода или частотно-регулируемого привода по существу необходимы следующие основные ступени схемы:
- Схема ШИМ-контроллера напряжения
- Трехфазный H-мост со стороны высокого / низкого давления Схема драйвера
- Схема трехфазного генератора
- Схема преобразователя напряжения в частоту для генерации параметра В / Гц.
Давайте изучим детали функционирования вышеперечисленных этапов с помощью следующего пояснения:
Простую схему контроллера напряжения PWM можно увидеть на схеме, приведенной ниже:
Контроллер PWM
Я уже включил и объяснил функционирование вышеуказанного каскада генератора ШИМ, который в основном предназначен для генерации переменного выходного сигнала ШИМ на выводе 3 микросхемы IC2 в ответ на потенциал, приложенный к выводу 5 той же микросхемы.
Предустановка 1K, показанная на схеме, представляет собой ручку управления RMS, которую можно соответствующим образом отрегулировать для получения желаемой пропорциональной величины выходного напряжения в форме ШИМ на выводе 3 IC2 для дальнейшей обработки.Он настроен на создание соответствующего выходного сигнала, который может быть эквивалентен среднеквадратическому напряжению сети 220 В или 120 В переменного тока.
Схема драйвера H-моста
На следующей схеме ниже показана схема трехфазного драйвера H-моста с одной микросхемой, использующая микросхему IRS2330.
Дизайн выглядит незамысловатым, поскольку большая часть сложностей решается встроенной в микросхему сложной схемой.
Хорошо рассчитанный трехфазный сигнал подается на входы HIN1 / 2/3 и LIN1 / 2/3 IC через каскад генератора трехфазных сигналов.
Выходы IC IRS2330 можно увидеть интегрированными с 6 МОП-транзисторами или мостовой сетью IGBT, стоки которых соответствующим образом настроены с двигателем, которым необходимо управлять.
Затворы МОП-транзистора / БТИЗ нижнего уровня интегрированы с выводом №3 IC2 описанного выше каскада схемы генератора ШИМ для инициирования инжекции ШИМ в каскад мостового МОП-транзистора. Это регулирование в конечном итоге помогает двигателю набрать желаемую скорость в соответствии с настройками (с помощью предустановки 1 k на первой диаграмме).
На следующей схеме мы визуализируем требуемую схему генератора трехфазных сигналов.
Конфигурирование схемы трехфазного генератора
Трехфазный генератор построен на базе пары КМОП-микросхем CD4035 и CD4009, которые генерируют трехфазные сигналы с точными размерами по показанным выводам.
Частота трехфазных сигналов зависит от поданных входных тактовых импульсов, которые должны быть в 6 раз больше предполагаемого трехфазного сигнала. Это означает, что если требуемая 3-фазная частота составляет 50 Гц, тактовая частота на входе должна быть 50 x 6 = 300 Гц.
Это также означает, что указанные выше тактовые импульсы можно изменять для изменения эффективной частоты ИС драйвера, которая, в свою очередь, будет отвечать за изменение рабочей частоты двигателя.
Однако, поскольку вышеупомянутое изменение частоты должно происходить автоматически в ответ на изменение напряжения, преобразователь напряжения в частоту становится важным. На следующем этапе обсуждается простая точная схема преобразователя напряжения в частоту для требуемой реализации.
Как создать постоянное соотношение V / F
Обычно в асинхронных двигателях для поддержания оптимальной эффективности скорости и момента вращения двигателя необходимо контролировать скорость скольжения или скорость ротора, что, в свою очередь, становится возможным при поддержании постоянное соотношение В / Гц.Поскольку магнитный поток статора всегда постоянен, независимо от входной частоты источника питания, скорость ротора становится легко управляемой, поддерживая постоянным отношение В / Гц.
В режиме разомкнутого контура это можно сделать грубо, поддерживая заранее заданные отношения В / Гц и вводя их вручную. Например, на первой диаграмме это можно сделать, соответствующим образом отрегулировав предустановку R1 и 1K.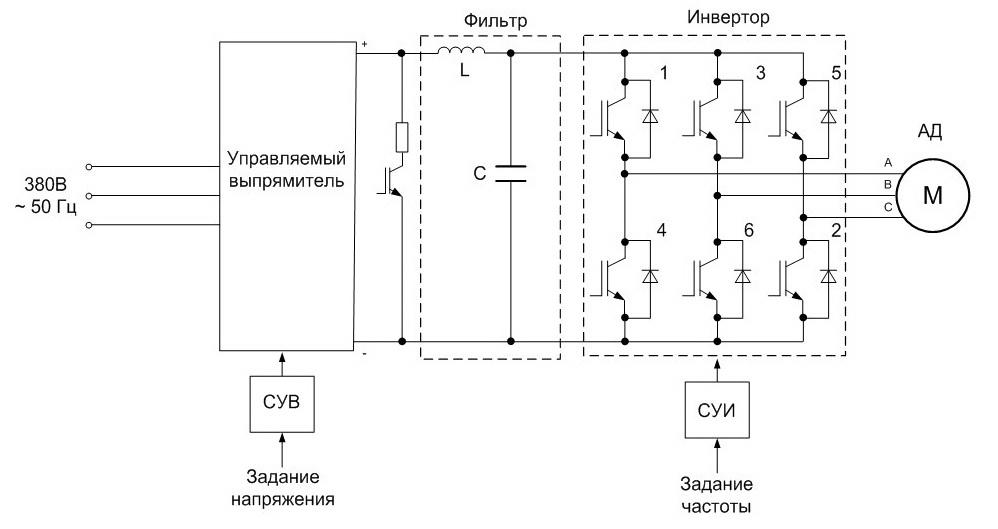 R1 определяет частоту, а 1K регулирует RMS выходного сигнала, поэтому, соответствующим образом отрегулировав два параметра, мы можем вручную установить требуемую величину В / Гц.
R1 определяет частоту, а 1K регулирует RMS выходного сигнала, поэтому, соответствующим образом отрегулировав два параметра, мы можем вручную установить требуемую величину В / Гц.
Однако, чтобы получить относительно точное управление крутящим моментом и скоростью асинхронного двигателя, мы должны реализовать стратегию замкнутого контура, в которой данные о скорости скольжения должны подаваться в схему обработки для автоматической регулировки отношения В / Гц, чтобы что это значение всегда остается примерно постоянным.
Реализация обратной связи по замкнутому контуру
Первую диаграмму на этой странице можно соответствующим образом изменить для проектирования автоматического регулирования В / Гц с обратной связью, как показано ниже:
На приведенном выше рисунке потенциал на выводе № 5 IC2 определяет ширина SPWM, генерируемого на выводе №3 той же ИС.SPWM генерируются путем сравнения выборки пульсаций напряжения сети 12 В на выводе № 5 с треугольной волной на выводе № 7 микросхемы IC2, которая подается на МОП-транзисторы нижнего уровня для управления двигателем.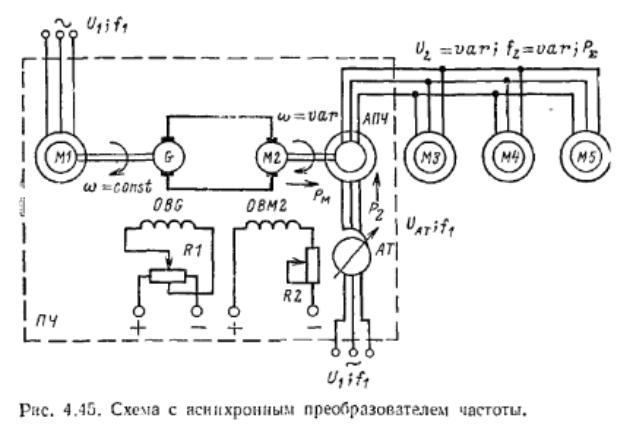
Первоначально этот SPWM установлен на некотором настроенном уровне (с использованием 1K perset), который запускает вентили IGBT нижней стороны трехфазного моста для инициирования движения ротора на заданном уровне номинальной скорости.
Как только ротор ротора начинает вращаться, подключенный тахометр с роторным механизмом вызывает пропорциональное увеличение напряжения на выводе № 5 IC2, это пропорционально приводит к расширению SPWM, вызывая большее напряжение на обмотках статора мотор.Это вызывает дальнейшее увеличение скорости ротора, вызывая большее напряжение на выводе № 5 IC2, и это продолжается до тех пор, пока эквивалентное напряжение SPWM не перестанет увеличиваться и синхронизация ротора статора не достигнет установившегося состояния.
Вышеупомянутая процедура автоматически регулируется в течение всего периода эксплуатации двигателя.
Как сделать и интегрировать тахометр
На следующей диаграмме можно увидеть простую конструкцию тахометра, его можно интегрировать с роторным механизмом, чтобы частота вращения могла питать основание BC547.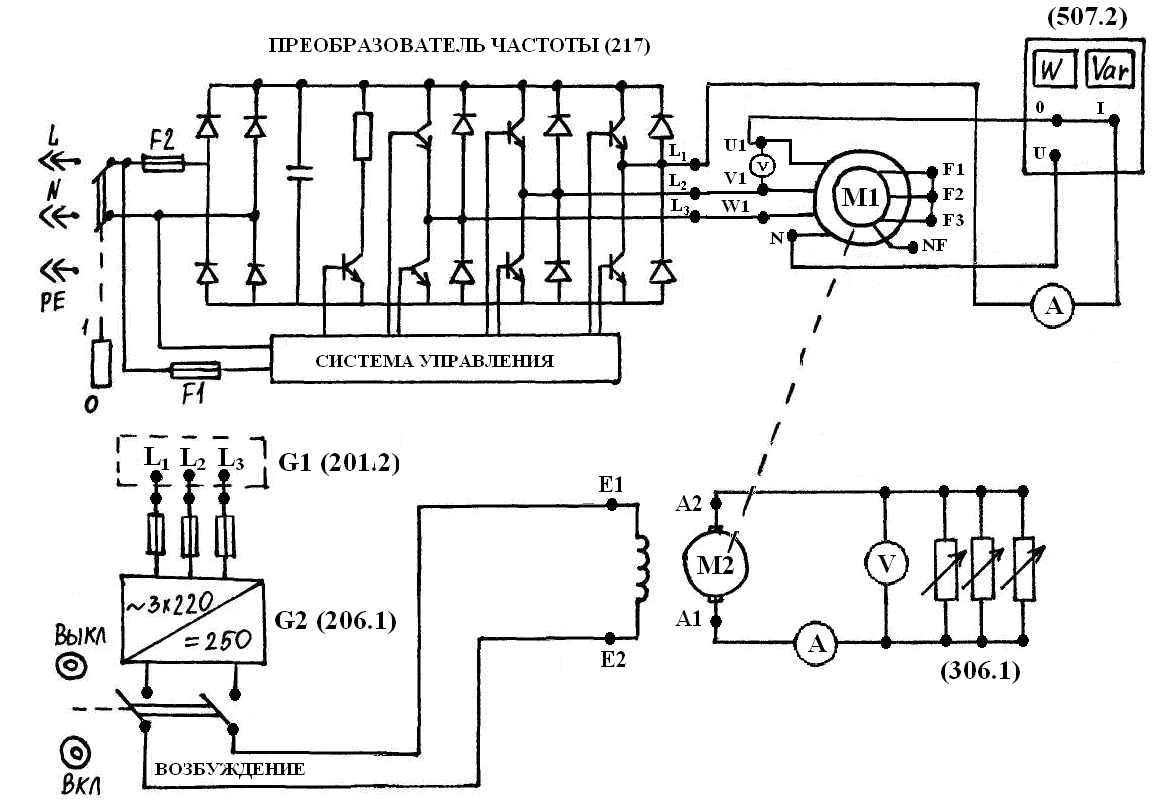
Здесь данные о скорости ротора собираются с датчика Холла или сети ИК-светодиодов / датчиков и передаются на базу T1.
T1 колеблется на этой частоте и активирует цепь тахометра, созданную путем соответствующей настройки моностабильной цепи IC 555.
Выходной сигнал вышеупомянутого тахометра изменяется пропорционально входной частоте на базе T1.
По мере увеличения частоты напряжение на крайнем правом выходе D3 также повышается и наоборот, что помогает поддерживать отношение В / Гц на относительно постоянном уровне.
Как управлять скоростью
Скорость двигателя с использованием постоянного напряжения / частоты может быть достигнута путем изменения частотного входа на тактовом входе IC 4035. Это может быть достигнуто путем подачи переменной частоты от нестабильной схемы IC 555 или любой другой стандартная нестабильная схема для тактового входа IC 4035.
Изменение частоты эффективно изменяет рабочую частоту двигателя, что соответственно снижает скорость скольжения.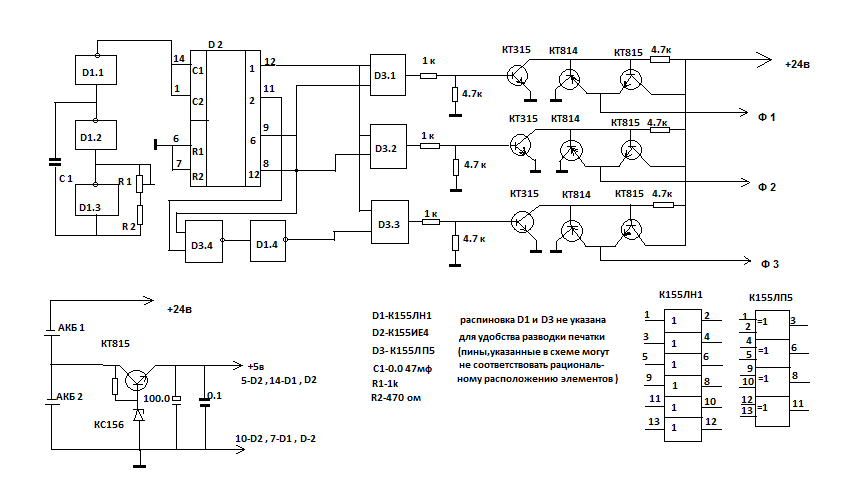
Это обнаруживается тахометром, и тахометр пропорционально снижает потенциал на выводе # 5 микросхемы IC2, что, в свою очередь, пропорционально снижает содержание SPWM на двигателе, и, следовательно, напряжение двигателя уменьшается, обеспечивая изменение скорости двигателя с правильное требуемое соотношение V / F.
Самодельный преобразователь напряжения в частоту
В приведенной выше схеме преобразователя напряжения в частоту используется микросхема IC 4060, и на ее частотно-зависимое сопротивление влияет узел светодиода / LDR для предполагаемых преобразований.
Узел светодиода / LDR запечатан внутри светонепроницаемой коробки, а LDR размещен на частотно-зависимом резисторе 1M IC.
Поскольку реакция LDR / LDR довольно линейна, изменяющееся свечение светодиода на LDR генерирует пропорционально изменяющуюся (увеличивающую или уменьшающуюся) частоту на выводе 3 ИС.
FSD или диапазон В / Гц каскада может быть установлен путем соответствующей настройки резистора 1 МОм или даже значения C1.
Светодиод указывает на то, что напряжение выводится и загорается через ШИМ от первого каскада схемы ШИМ. Это означает, что по мере изменения ШИМ освещение светодиода также будет изменяться, что, в свою очередь, приведет к пропорциональному увеличению или уменьшению частоты на выводе 3 IC 4060 на приведенной выше диаграмме.
Интеграция преобразователя с VFD
Эта изменяющаяся частота от IC 4060 теперь просто должна быть интегрирована с входом синхронизации трехфазного генератора IC CD4035.
Вышеупомянутые этапы являются основными составляющими для создания 3-фазной схемы частотно-регулируемого привода.
Теперь было бы важно обсудить шину постоянного тока, необходимую для питания контроллеров двигателей IGBT, и процедуры настройки для всей конструкции.
Шина постоянного тока, подключенная к рельсам H-моста IGBT, может быть получена путем выпрямления доступного трехфазного сетевого входа с использованием следующей конфигурации схемы. Шины IGBT DC BUS подключаются к точкам, обозначенным как «нагрузка».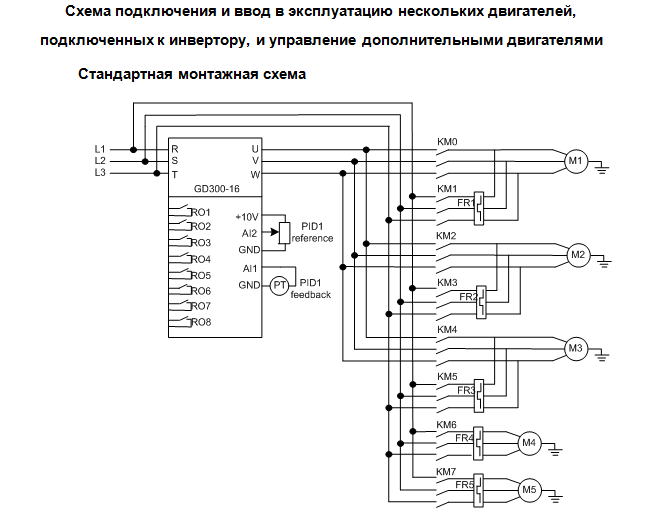
Для однофазного источника выпрямление может быть выполнено с использованием стандартной конфигурации сети с 4 диодными мостами.
Как настроить предлагаемую трехфазную схему частотно-регулируемого приводаЭто можно сделать в соответствии со следующими инструкциями:
После подачи напряжения шины постоянного тока на IGBT (без подключенного двигателя) отрегулируйте предустановку ШИМ 1k до напряжение на шинах становится равным заданному напряжению двигателя.
Затем настройте предустановку IC 4060 1M, чтобы настроить любой из входов IC IRS2330 на требуемый правильный уровень частоты в соответствии с заданными характеристиками двигателя.
После завершения вышеуказанных процедур указанный двигатель может быть подключен и запитан с различными уровнями напряжения, параметром В / Гц и подтвержден для автоматических операций В / Гц на подключенном двигателе.
О Swagatam
Я инженер-электронщик (dipIETE), любитель, изобретатель, разработчик схем / печатных плат, производитель.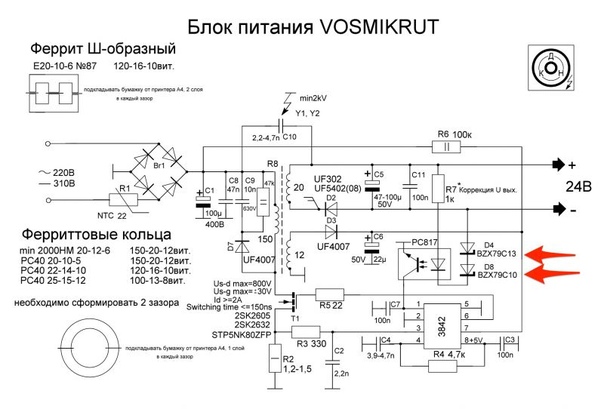 Я также являюсь основателем веб-сайта: https://www.homemade-circuits.com/, где я люблю делиться своими инновационными идеями и руководствами по схемам.
Я также являюсь основателем веб-сайта: https://www.homemade-circuits.com/, где я люблю делиться своими инновационными идеями и руководствами по схемам.
Если у вас есть какие-либо вопросы, связанные со схемой, вы можете взаимодействовать с ними через комментарии, я буду очень рад помочь!
Зачем использовать преобразователь частоты вместе с электродвигателем? – Леонардо Энергия
Стефан Фассбиндер (DKI)
Электродвигатель и электрогенератор – это одно и то же. .
В принципе, любой электродвигатель также может вырабатывать электричество. Электроприводы намного опережают двигатели внутреннего сгорания, поскольку, к сожалению, автомобильный двигатель, который всасывает выхлопные газы во время торможения и спусков и преобразует их в топливо и свежий воздух, все еще не готов.Электродвигатель может обеспечить это, хотя в течение первого столетия его использования его использование в значительной степени затруднялось двумя основными недостатками:
- Электродвигатель не имеет педали акселератора.

- Розетка не имеет «водопроводного крана».
Когда электродвигатель работает, он генерирует напряжение с полярностью, противоположной напряжению питания .
Следовательно, ток слишком высокий при первом включении, когда двигатель еще не работает.Для больших двигателей необходимо принять меры предосторожности, чтобы не повредить их и не сгореть предохранители. По мере увеличения скорости двигателя это индуцированное напряжение увеличивается. Фактически, при превышении скорости, при которой приложенное напряжение и напряжение сети равны, двигатель будет генерировать более высокое напряжение, чем напряжение в линии. Ток будет течь в обратном направлении, и двигатель изменил свою функцию на генератор.
Это хорошо, так как предлагает отличные преимущества энергоэффективности , особенно для кранов, лифтов и т. Д.которые фактически становятся электростанциями при движении вниз. Что не так хорошо, так это то, что линия всегда имеет примерно одинаковое напряжение, но по отношению к другим нагрузкам, например огни, это должно быть так. Следовательно, положения должны быть предусмотрены снова, если скорость двигателя должна быть изменена . Раньше это было обременительной задачей. Приходилось использовать трансформаторы с несколькими ответвлениями, например, в локомотивах, но это было громоздкое и дорогое решение, или ограничивать ток резисторами, например, в трамваях, что было неэффективным решением.
Следовательно, положения должны быть предусмотрены снова, если скорость двигателя должна быть изменена . Раньше это было обременительной задачей. Приходилось использовать трансформаторы с несколькими ответвлениями, например, в локомотивах, но это было громоздкое и дорогое решение, или ограничивать ток резисторами, например, в трамваях, что было неэффективным решением.
А с двигателями переменного тока , однофазными или трехфазными, все становится еще сложнее. Принцип электродвигателя всегда заключается в создании вращательного движения за счет притяжения и отталкивания магнитных сил. В строгих терминах физики электродвигателей даже не существует, но все они должны быть названы магнитными двигателями с точки зрения пуриста: электрический магнит притягивает другой – также электрический или постоянный – магнит, пока он не подойдет как можно ближе как может быть.Затем полярность тока в (одном из) электромагнита (-ов) инвертируется, и сила притяжения инвертируется в силу отталкивания.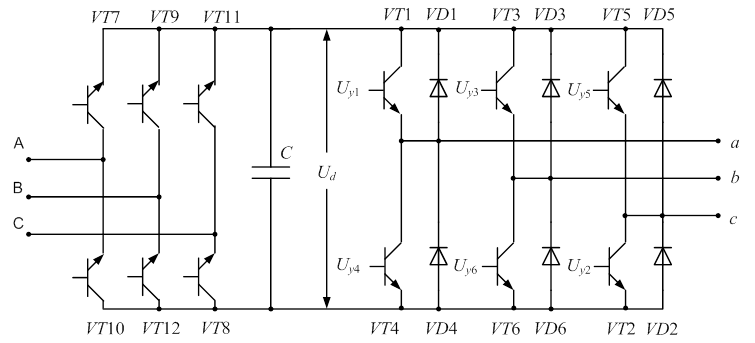 Механическая конструкция двигателя устроена так, чтобы допускать такое движение только по кругу, потому что требуется вращательное движение. Двигатели переменного тока могут быть построены проще, чем двигатели постоянного тока, потому что периодическая смена полярности происходит в любом случае и не должна генерироваться внутри машины.
Механическая конструкция двигателя устроена так, чтобы допускать такое движение только по кругу, потому что требуется вращательное движение. Двигатели переменного тока могут быть построены проще, чем двигатели постоянного тока, потому что периодическая смена полярности происходит в любом случае и не должна генерироваться внутри машины.
Но становится очевидным, что изменение скорости вращения затруднительно для двигателей постоянного тока , так как оно во многом зависит от питающего напряжения, которое приблизительно стабильно, и невозможно для двигателей переменного тока, скорость которых строго совпадает с частотой сеть, которая с технической точки зрения полностью стабильна.
Теперь любой тип электродвигателя должен быть спроектирован таким образом, чтобы при желаемой (номинальной) скорости напряжение, генерируемое в двигателе, было примерно таким же, как приложенное (номинальное) рабочее напряжение. В двигателях постоянного тока индуцированное напряжение должно быть несколько ниже, чем в линии. При нагрузке двигатель постоянного тока немного теряет скорость, что приводит к дальнейшему падению наведенного напряжения и, следовательно, к большей разнице в линейном напряжении и более высокому входному току, соответствующему более высокой нагрузке. Таким образом, он адаптируется (более или менее) по своей природе к различной нагрузке.
При нагрузке двигатель постоянного тока немного теряет скорость, что приводит к дальнейшему падению наведенного напряжения и, следовательно, к большей разнице в линейном напряжении и более высокому входному току, соответствующему более высокой нагрузке. Таким образом, он адаптируется (более или менее) по своей природе к различной нагрузке.
Это преимущество перед двигателем внутреннего сгорания и одно из существенных отличий в рабочих характеристиках, которые будут обсуждаться здесь. Представьте, что вы отключили двигатель автомобиля и положили кирпич на педаль акселератора. Вы не должны этого делать. Электродвигатель, однако, не будет возражать, если он будет работать на полном напряжении без нагрузки, за исключением, возможно, одного конкретного типа – последовательно соединенной коллекторной машины. Большие блоки могут фактически быть разрушены центробежными силами, когда они питаются полным напряжением и без нагрузки.Небольшие единицы, например, используемые в кухонной технике и e.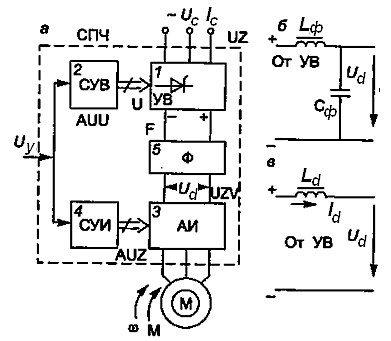 грамм. для стеклоочистителя в автомобиле иметь достаточные потери на трение, чтобы предотвратить это. Но при подаче фиксированного напряжения питания определенная скорость всегда будет связана с фиксированной выходной и входной мощностью. Поскольку нет простой и понятной вещи, такой как водопроводный кран на кухне и в ванной, который можно было бы подключить к розетке, чтобы обеспечить контроль потока электроэнергии, регулирование мощности и / или скорости электродвигателя было сложная задача еще до изобретения силовой электроники.
грамм. для стеклоочистителя в автомобиле иметь достаточные потери на трение, чтобы предотвратить это. Но при подаче фиксированного напряжения питания определенная скорость всегда будет связана с фиксированной выходной и входной мощностью. Поскольку нет простой и понятной вещи, такой как водопроводный кран на кухне и в ванной, который можно было бы подключить к розетке, чтобы обеспечить контроль потока электроэнергии, регулирование мощности и / или скорости электродвигателя было сложная задача еще до изобретения силовой электроники.
В большей степени это относится к двигателям переменного тока. Скорость синхронной машины абсолютно стабильна, будь то машина, используемая в качестве двигателя или генератора. Что ж, он действительно немного теряет скорость в течение очень ограниченного времени, когда, например, он переключается с нейтрального режима на двигатель, как раз до тех пор, пока фазовый угол между электрической фазой и положением ротора больше не будет «синфазным». . После этого короткого периода перехода скорость двигателя и частота сети снова будут синхронизированы. Можно представить себе этот процесс так:
Можно представить себе этот процесс так:
Когда машина работает без нагрузки, генерируемое ею переменное напряжение высокое при высоком линейном напряжении и низкое при низком сетевом напряжении. Они находятся в фазе друг с другом, поэтому ток практически не течет в обоих направлениях (грубо говоря, игнорируя аспекты реактивной мощности, специалисты подчеркнут здесь).
Поскольку электрическая мощность (а также ее мгновенные значения) рассчитывается как напряжение, умноженное на ток, изменение напряжения или тока на противоположное означает изменение знака и, следовательно, изменение направления потока энергии.Теперь, когда машина работает как двигатель, генерируемое ею переменное напряжение отстает от приложенного напряжения. Когда напряжение в сети уже достигает своего пика, оно все еще несколько ниже, поэтому ток будет течь из сети в машину; так что он действует как мотор. К тому времени, когда ток, наконец, поменяет полярность, линейное напряжение также изменится, поэтому мы умножаем два раза на -1 и застреваем в работе двигателя.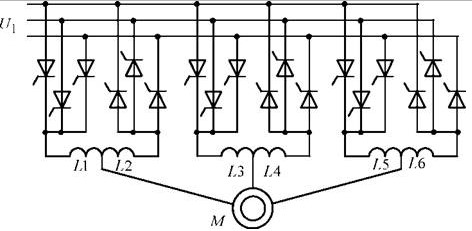
Когда мы приводим вал машины в действие, чтобы она работала как генератор, генерируемое им переменное напряжение опережает приложенное напряжение.Оно уже снова падает, когда напряжение в сети достигает пика, поэтому ток будет течь из машины в сеть. К тому времени, когда ток поменяет полярность… и так далее.
Теперь все становится трудным, когда мы переходим к обсуждению наиболее широко используемой электрической машины , асинхронного двигателя , поскольку процессы, приводящие ее в движение, трудно представить в иллюстративной форме. Он имеет электромагниты с обеих сторон, в статоре и в роторе. Обмотки ротора закорочены и действуют как вторичные обмотки трансформатора.Магнитное поле, вращающееся в статоре, индуцирует ток в закороченных обмотках ротора, который затем создает собственное магнитное поле. Как и в синхронной машине, полюса полей статора, приводимые в движение частотой сети, бегают по кругу и, так сказать, преследуют полюса поля ротора перед собой.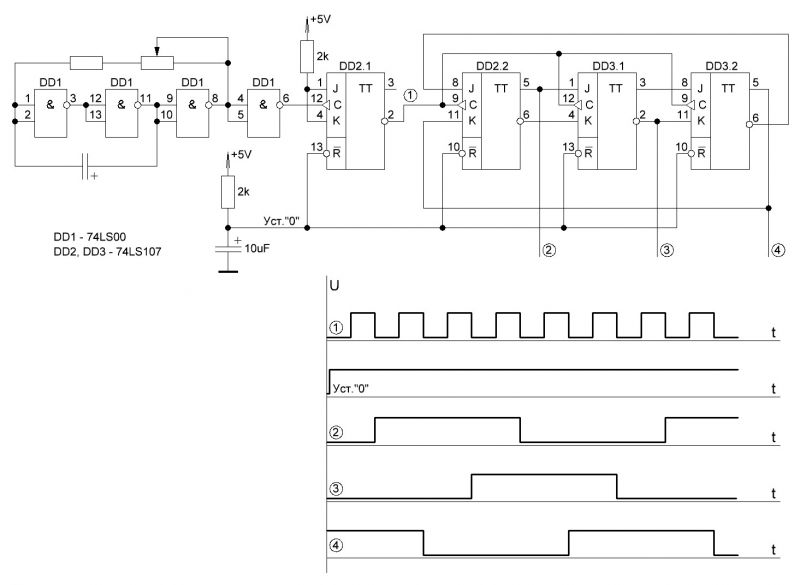 Итак, ротор начинает вращаться. Асинхронный двигатель всегда будет вращаться немного медленнее, чем магнитные полюса статора. Эта небольшая разница, скольжение, необходима для поддержания тока в обмотках ротора и, таким образом, для сохранения магнитного поля ротора.Частота скольжения может составлять всего 1 Гц или даже меньше в большой машине, поэтому, если в 2-полюсном асинхронном двигателе, питающемся с частотой 50 Гц, полюса статора вращаются со скоростью 3000 об / мин, ротор будет вращаться со скоростью 2940 об / мин. Когда вы его увеличите, он будет действовать как генератор. При 3060 об / мин, скажем, при том же скольжении с обратным знаком выходной ток будет таким же, как и входной ток при 2940 / мин.
Итак, ротор начинает вращаться. Асинхронный двигатель всегда будет вращаться немного медленнее, чем магнитные полюса статора. Эта небольшая разница, скольжение, необходима для поддержания тока в обмотках ротора и, таким образом, для сохранения магнитного поля ротора.Частота скольжения может составлять всего 1 Гц или даже меньше в большой машине, поэтому, если в 2-полюсном асинхронном двигателе, питающемся с частотой 50 Гц, полюса статора вращаются со скоростью 3000 об / мин, ротор будет вращаться со скоростью 2940 об / мин. Когда вы его увеличите, он будет действовать как генератор. При 3060 об / мин, скажем, при том же скольжении с обратным знаком выходной ток будет таким же, как и входной ток при 2940 / мин.
Вместе с двигателями постоянного тока, включая последовательно соединенные коллекторные двигатели, которые могут работать как от переменного, так и от постоянного тока, асинхронный трехфазный двигатель запускается самостоятельно, как только будет подано сетевое напряжение. Более того: это будет происходить очень резко, с в несколько раз превышающим номинальный крутящий момент и потребляемый ток, как описано выше. Это следующее отличие от двигателя внутреннего сгорания, для запуска которого требуется небольшой двигатель постоянного тока.
Более того: это будет происходить очень резко, с в несколько раз превышающим номинальный крутящий момент и потребляемый ток, как описано выше. Это следующее отличие от двигателя внутреннего сгорания, для запуска которого требуется небольшой двигатель постоянного тока.
Синхронная машина как таковая не может запуститься одна. По этой и другим причинам он обычно используется только как генератор.
Кроме того, последовательная коммутаторная машина в принципе является машиной постоянного тока, но поскольку ее статор и ротор соединены последовательно, они оба меняют полярность при изменении тока, поэтому направление вращения остается прежним.Таким образом, он также может работать как двигатель переменного тока, но при использовании в качестве генератора он будет генерировать постоянный ток, полярность которого зависит от некоторого случайного остаточного магнетизма, если не определена специальной дополнительной катушкой.
Теперь, когда управлять мощностью и скоростью двигателя внутреннего сгорания несложно, просто уменьшая подачу топлива, что, с другой стороны, является ужасной необходимостью, в то время как электродвигатель более или менее регулирует себя, «водопроводный кран» для электричества было окончательно изобретено в семидесятых: теперь доступны инверторы, которые преобразуют переменный ток в постоянный, а постоянный ток снова в переменный с электронными компонентами (и очень низкими дополнительными потерями) . Выход переменного тока можно регулировать как по амплитуде, так и по частоте, чтобы адаптировать его к требованиям любого двигателя в любой желаемой точке работы. Скорость и крутящий момент теперь можно контролировать независимо друг от друга. Таким образом, инвертор преодолевает практически все недостатки электродвигателя по сравнению с любым двигателем внутреннего сгорания, в то время как преимущества остаются такими же выдающимися, как и есть, включая обратную связь по мощности (инверсия потока энергии), если используется 4-квадрантный инвертор (2 направления вращения, 2 направления вращения). направления потоков энергии).
Выход переменного тока можно регулировать как по амплитуде, так и по частоте, чтобы адаптировать его к требованиям любого двигателя в любой желаемой точке работы. Скорость и крутящий момент теперь можно контролировать независимо друг от друга. Таким образом, инвертор преодолевает практически все недостатки электродвигателя по сравнению с любым двигателем внутреннего сгорания, в то время как преимущества остаются такими же выдающимися, как и есть, включая обратную связь по мощности (инверсия потока энергии), если используется 4-квадрантный инвертор (2 направления вращения, 2 направления вращения). направления потоков энергии).
В очень простых терминах такие инверторы создают соединение между постоянным напряжением в звене постоянного тока, когда мгновенное переменное напряжение в линии выше, чем напряжение постоянного тока в звене, что позволяет потреблять энергию и отключает оба от каждого другое, когда напряжение «снаружи» ниже. Это принцип работы двигателя. Для возврата энергии в генераторном режиме инвертор, оправдывая свое название, делает обратное: подключается, когда напряжение в сети низкое, и отключается, когда оно высокое.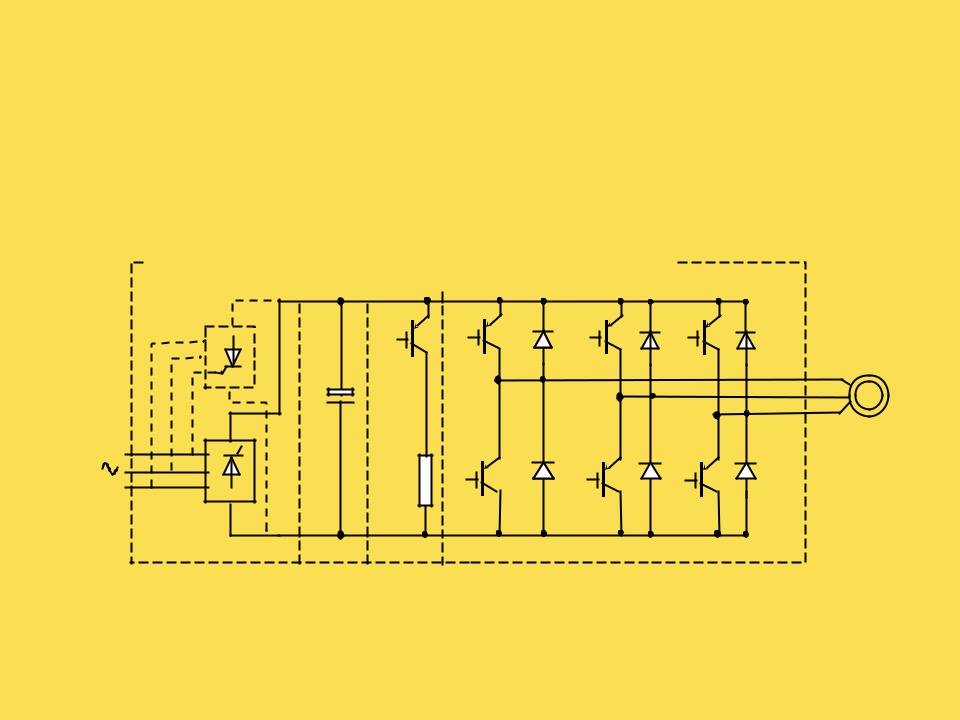 Таким образом, энергия может идти в любом направлении, даже если линейное напряжение постоянно, а постоянное напряжение в промежуточной цепи также может поддерживаться на постоянном уровне, в зависимости от конструкции.
Таким образом, энергия может идти в любом направлении, даже если линейное напряжение постоянно, а постоянное напряжение в промежуточной цепи также может поддерживаться на постоянном уровне, в зависимости от конструкции.
Другой конец, сторона двигателя силового электронного инвертора, несколько сложнее. Еще раз упрощая, принцип состоит в том, чтобы включать и выключать двигатель очень быстро, намного быстрее, чем это может сделать любой механический переключатель. Путем изменения отношения времени включения / выключения средний ток двигателя можно непрерывно изменять, даже если напряжение постоянного тока в промежуточной цепи поддерживается на постоянной амплитуде.Этот принцип намного сложнее и намного дороже, чем управление потоком воды в ванне с помощью водопроводного крана, но преимущества настолько очевидны, что этот принцип неуклонно распространяется во всем мире электрических приводов.
Инверторы также могут использоваться в сетях постоянного тока .
В то время как старые трамваи – а многие из них все еще существуют – вполне могли использовать свои двигатели для торможения, электроэнергия не могла подаваться обратно в линии, потому что напряжение, генерируемое двигателем, было, грубо говоря, немного ниже, чем напряжение. на линии, поэтому инверсия потока мощности была невозможна.Электроэнергия, генерируемая во время торможения, поглощалась резисторами и терялась в виде тепла. В настоящее время инверторы могут прерывать постоянный ток в переменный, переменный ток можно преобразовать (чем меньше трансформатор, тем выше выбирается частота прерывания), выпрямить обратно в постоянный ток и подать обратно в воздушную линию.
Двигатель внутреннего сгорания имеет определенную номинальную выходную мощность, и все. Если вы попытаетесь получить чуть больше крутящего момента, чем указано на паспортной табличке, вы просто заглушите двигатель.
Какая разница в поведении электродвигателя! Он также имеет определенную максимальную мощность и максимальный крутящий момент, но что он делает, если вы хотите большего? Это дает вам больше!
Скорость двигателя постоянного тока или асинхронного двигателя немного падает, в то время как в синхронном двигателе угол между приложенным и индуцированным напряжением становится немного больше.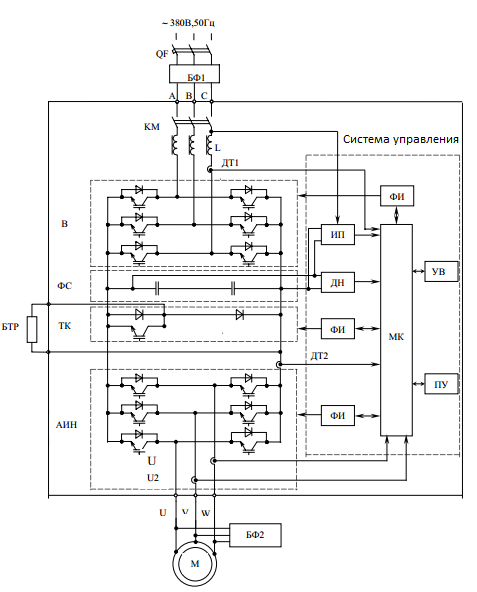 Оба приводят к более высокому потребляемому току, что обеспечивает более высокий выходной крутящий момент при примерно или точно такой же скорости, соответственно.Двигатель может предложить удвоенный номинальный крутящий момент, если вы этого захотите. В зависимости от типа конструкции и размера двигателя он может быть более чем в 5 раз выше номинального. Единственная проблема заключается в том, что это позволяет это делать только в течение ограниченного времени, потому что чрезмерный ток вызывает избыточное тепло в двигателе, и в конечном итоге двигатель перегорит. Специальные выключатели защиты двигателя, которые регулируются в соответствии с номинальным током, прерывают ток двигателя, если номинальный ток превышается слишком долго. Лучше всего отслеживать фактическую температуру двигателя.Или использовать инвертор. Его электронное управление предлагает неограниченные возможности программирования.
Оба приводят к более высокому потребляемому току, что обеспечивает более высокий выходной крутящий момент при примерно или точно такой же скорости, соответственно.Двигатель может предложить удвоенный номинальный крутящий момент, если вы этого захотите. В зависимости от типа конструкции и размера двигателя он может быть более чем в 5 раз выше номинального. Единственная проблема заключается в том, что это позволяет это делать только в течение ограниченного времени, потому что чрезмерный ток вызывает избыточное тепло в двигателе, и в конечном итоге двигатель перегорит. Специальные выключатели защиты двигателя, которые регулируются в соответствии с номинальным током, прерывают ток двигателя, если номинальный ток превышается слишком долго. Лучше всего отслеживать фактическую температуру двигателя.Или использовать инвертор. Его электронное управление предлагает неограниченные возможности программирования.
Итак, начнем:
- Поскольку электродвигатель запускается самостоятельно, а многие типы даже предлагают максимальный крутящий момент (тормозной момент) в режиме покоя, в электромобиле не требуется сцепление.

- Поскольку электродвигатель обеспечивает гораздо больший крутящий момент в течение ограниченного времени, чем при непрерывной работе, в электромобиле не требуется переключение передач, поскольку транспортным средствам всегда требуется максимальная сила тяги только в течение ограниченных периодов разгона и движения в гору.
Итак, электродвигатель – гораздо лучший и более экологичный вариант для эксплуатации транспортного средства, чем двигатели внутреннего сгорания любого типа. Вместе с силовым электронным инвертором они близки к идеалу, в то время как привод внутреннего сгорания – это более или менее импровизированный способ передвижения транспортного средства, который только благодаря более чем 100-летнему опыту вместе с огромным и мощным рынком можно было оптимизировать путем: большое состояние, которое мы наблюдаем сегодня. Дальнейшего прогресса не видно.
Все, чего сейчас не хватает, так это годной батареи.В этом случае весь наземный транспорт сразу перейдет на электроприводы. Везде, где есть контактный провод, электропривод уже демонстрирует свое превосходство, и еще есть потенциал.
Мораль: двигатель внутреннего сгорания и электропривод не могут быть менее похожими. Если вы хотите разобраться в электрических приводах, первое, что вам нужно сделать, это забыть все о двигателе вашего автомобиля.
Методы управления скоростью различных типов двигателей с регулировкой скорости
Казуя ШИРАХАТА
Oriental Motor Co., Ltd. предлагает широкий выбор двигателей с регулировкой скорости. Наши комплекты двигателей с регулировкой скорости включают двигатель, драйвер (контроллер) и потенциометр, который позволяет легко регулировать скорость. Существует три группы продукции для двигателей с регулировкой скорости. «Блок управления скоростью переменного тока», в котором используется самый популярный однофазный асинхронный двигатель с конденсаторным приводом, небольшой и высокоэффективный «Бесщеточный двигатель постоянного тока» и «Инверторный блок», который объединяет трехфазный асинхронный двигатель с небольшой инвертор.В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
1. Введение
Большое количество двигателей используется для общих целей в нашем окружении, от домашнего оборудования до станков на промышленных предприятиях. Электродвигатель в настоящее время является необходимым и незаменимым источником энергии во многих отраслях промышленности. Эти двигатели имеют самые разные функции и характеристики.Если сосредоточить внимание на сегменте регулирования скорости на рынке двигателей, серводвигатели и шаговые двигатели управляют своей скоростью с помощью последовательности импульсов, в то время как асинхронный двигатель и бесщеточный двигатель постоянного тока регулируют скорость с помощью внешнего резистора и / или напряжения постоянного тока.
В этой статье объясняется структура, принцип управления скоростью и особенности следующих трех групп продуктов, которые могут относительно легко управлять скоростью с помощью аналогового входа.
- Электродвигатель и редукторные электродвигатели переменного тока
- Бесщеточные двигатели постоянного тока и мотор-редукторы
- Инверторный блок
2.Методы управления скоростью различных двигателей с регулировкой скорости
Метод управления выходом схемы управления скоростью можно условно разделить на две группы: управление фазой и управление инвертором, которые составляют группы продуктов, показанные на рис. 1.
Рис.1 Классификация двигателей с регулировкой скорости
2.1. Двигатели с регулировкой скорости переменного тока
2.1.1. Конструкция Motor
Как показано на рис. 2, конструкция однофазного и трехфазного асинхронных двигателей включает статор, на котором намотана первичная обмотка, и цельный алюминиевый ротор в форме корзины, отлитый под давлением.Ротор недорогой, потому что конструкция проста и не использует магнит.Рис. 2 Конструкция асинхронного двигателя
Когда необходимо управлять скоростью этого двигателя, для определения скорости используется тахогенератор, который присоединяется к двигателю, как показано на рис. 3. Тахогенератор состоит из магнита, подключенного непосредственно к валу двигателя. и катушка статора, которая обнаруживает магнитные полюса и генерирует переменное напряжение с частотой 12 циклов на оборот.Поскольку это напряжение и частота увеличиваются с увеличением скорости вращения, скорость вращения двигателя регулируется на основе этого сигнала.
Рис.3 Система электродвигателя с регулировкой скорости переменного тока
2.1.2. Принцип управления скоростью
Скорость вращения N асинхронного двигателя может быть выражена выражением (1). Когда напряжение, приложенное к двигателю, увеличивается и уменьшается, скольжение s изменяется, а затем частота вращения N изменяется.
N = 120 · f · (1- s ) / P · · · · · · · · · · (1)
N : Скорость вращения [об / мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
В случае асинхронного двигателя, показанного на рис. 4, на кривой «Скорость вращения – крутящий момент» существует стабильный диапазон и нестабильный диапазон. Поскольку невозможно надежно работать в нестабильном диапазоне, простое управление напряжением (управление разомкнутым контуром) ограничивается регулированием скорости в узком диапазоне, например, N1 ~ N3 на рис.5. Чтобы обеспечить надежную работу даже в вышеупомянутом нестабильном диапазоне, необходимо определять скорость вращения двигателя и использовать механизм регулирования напряжения (управление с обратной связью), который снижает ошибку скорости по сравнению с установить значение.
Рис. 4 Частота вращения – крутящий момент асинхронных двигателей
Рис.5 Простое управление напряжением
Доступные методы управления напряжением включают управление трансформатором или управление фазой.На рис. 6 показано, когда напряжение регулируется с помощью трансформатора. Этот метод не так-то просто сделать с двигателем, регулирующим скорость переменного тока. В качестве альтернативы, напряжение переменного тока можно регулировать, устанавливая время включения / выключения каждого полупериода переменного напряжения (50 или 60 Гц), подаваемого на двигатель, с помощью переключающего элемента (тиристора или симистора), который может напрямую включать и выключать переменный ток. напряжение, как показано на Рис. 7 и Рис. 8. Регулировка скорости осуществляется методом фазового регулирования путем управления среднеквадратичным значением значение переменного напряжения.
Рис.6 Изменение напряжения трансформатором
Рис.7 Изменение напряжения с помощью фазового управления
Рис.8 Цепь управления симистором
Этот метод управления скоростью переменного тока может обеспечить устойчивое управление скоростью за счет регулирования фазы с обратной связью даже в нестабильном диапазоне.
На рис. 9 показана конфигурация системы управления скоростью для электродвигателя управления скоростью переменного тока в виде блок-схемы.
Рис. 9 Блок-схема системы электродвигателя с регулировкой скорости переменного тока
Рис.10 Форма сигнала для каждого блока
На рис. 10 показаны формы сигналов каждого блока. Установленное значение d скорости и обнаруженное напряжение e скорости, генерируемое тахогенератором, сравниваются в блоке усилителя сравнения. Затем определяется уровень сигнала напряжения , .
Сигнал напряжения a низкий, когда обнаруженное значение скорости до заданного значения скорости увеличивается, и выше, когда заданное значение скорости уменьшается.Поскольку сигнал запуска выводится в точке, где треугольная волна b, пересекается с сигналом напряжения a , определяется синхронизация (фазовый угол), когда симистор включен, с уровнем сигнала напряжения a . Когда это время является медленным, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается. Пониженная скорость вращения возвращается снова, и управление повторяется, так что разница между определенным значением скорости и установленным значением скорости всегда может быть постоянной.
На рис. 11 показан внешний вид упомянутого выше регулятора скорости. На рис. 11 рабочая точка двигателя образует петлю Q-R-S-T-Q с центром на O, и скорость вращения поддерживается между N1 и N2. Этот цикл максимально сокращен за счет увеличения точности определения скорости.
Рис.11 Работа регулятора скорости
Двигатель с регулировкой скорости переменного тока имеет следующие особенности при использовании этого регулирования фазы с обратной связью.
1) Поскольку напряжение переменного тока регулируется напрямую, схема управления скоростью может быть сконфигурирована просто, поскольку в схеме сглаживания нет необходимости, что позволяет получить компактную конструкцию по низкой цене.
2) Таким же образом возможна долговечная конструкция, поскольку нет необходимости в большом алюминиевом электролитическом конденсаторе.
3) Переключение выполняется только один раз в течение каждого полупериода промышленного источника переменного тока, что снижает уровень генерируемого шума.
2.1.3. Характеристики
Электродвигатели переменного тока с регулировкой скорости обычно имеют характеристики «Скорость вращения – крутящий момент», показанные на рис.12.
Рис.12 Частота вращения-крутящий момент
«Строка безопасной эксплуатации» приведена на рис. 12. «Строка безопасной эксплуатации» представляет собой ограничение, при котором двигатель может работать в непрерывном режиме без превышения максимально допустимой температуры.
2.2. Бесщеточный блок управления скоростью постоянного тока
2.2.1. Конструкция двигателя
Что касается конструкции бесщеточного двигателя, катушка соединена звездой (соединена Y) с тремя фазами: U, V и W и расположена в статоре, а ротор состоит из магнитов. намагниченный в многополюсной конфигурации, как показано на рис.14.
Внутри статора три ИС Холла расположены как магнитные элементы, так что разность фаз выходного сигнала от каждой ИС Холла будет составлять 120 градусов при каждом повороте ротора.
Рис.14 Конструкция бесщеточного двигателя постоянного тока
2.2.2. Принцип управления скоростью
Как показано на рис. 15, характеристики вращательной скорости-момента бесщеточного двигателя постоянного тока показывают отрицательную наклонную характеристику, когда его скорость не контролируется, что аналогично таковой у щеточного двигателя постоянного тока.
Рис. 15 Характеристики скорости вращения бесщеточного двигателя постоянного тока
Когда нагрузка не приложена и входное напряжение установлено на V2 на Рисунке 15, рабочая точка двигателя становится P, а скорость вращения равна N1. Когда прикладывается крутящий момент T1 нагрузки, рабочая точка смещается к Q, а скорость вращения снижается до N2, однако скорость вращения возвращается к N1, если напряжение повышается до V3. Следовательно, поскольку скорость вращения изменяется всякий раз, когда изменяется крутящий момент нагрузки, механизму управления скоростью нужно будет только изменять входное напряжение всякий раз, когда наблюдается изменение скорости, чтобы поддерживать постоянную скорость на линии PR.
Этот контроль напряжения реализуется инвертором в выходной части схемы управления (драйвер). Этот инвертор генерирует трехфазное переменное напряжение из постоянного тока путем включения и выключения, как в последовательности, показанной на рисунке 16 (b), с использованием шести переключающих элементов (FET или IGBT), показанных на рисунке 16 (a).
Рис. 16 (a) Выходная часть схемы управления (драйвер)
Рис.16 (b) Последовательность переключения
Переключающие элементы подключены к обмотке двигателя, как показано на рис.16 (a), а состояние ВКЛ / ВЫКЛ переключающего элемента определяет, какая катушка статора находится под напряжением и в каком направлении будет течь ток, то есть какая катушка станет полюсом N или полюсом S.
Фактически, положение магнитного полюса ротора определяется ИС Холла, и соответствующий переключающий элемент включается или выключается, как показано на Рис. 16 (b). Например, в случае шага 1 транзисторы Tr1 и Tr6 включаются, и ток течет из U-фазы в W-фазу. В это время U-фаза возбуждается как полюс N, а фаза W становится S-полюсом, а ротор поворачивается на 30 градусов, переходя к шагу 2.Один оборот ротора выполняется повторением этой операции 12 раз (шаги 1 ~ 12).
На рис. 17 показана блок-схема конфигурации для управления скоростью бесщеточного двигателя постоянного тока.
Рис.17 Блок-схема системы бесщеточного двигателя постоянного тока
Последовательность переключения инвертора определяется сигналом от ИС Холла в части определения положения блок-схемы, и двигатель вращается.
Затем сигнал от ИС Холла отправляется на датчик скорости, чтобы стать сигналом скорости, и он сравнивается с сигналом установки скорости в блоке усилителя сравнения, который затем генерирует сигнал отклонения.Значение входного тока двигателя определяется блоком настройки ШИМ на основе сигнала отклонения.
Бесщеточные двигатели постоянного тока имеют следующие особенности.
1) Он имеет высокий КПД, поскольку используется ротор с постоянными магнитами и вторичные потери небольшие.
2) Инерция ротора может быть уменьшена, и достигается высокая скорость реакции.
3) Можно уменьшить размер двигателя, потому что он очень эффективен.
4) Колебания скорости при изменении нагрузки незначительны.
Фиг.16 показана типичная последовательность переключения (метод подачи напряжения на 120 градусов). Еще более эффективная система бесщеточного двигателя постоянного тока использует метод возбуждения синусоидальной волны путем получения информации о положении ротора с высоким разрешением из программного обеспечения из сигнала IC Холла. Этот метод обеспечивает малошумный метод привода, поскольку ток, протекающий в двигатель, не изменяется быстро. (2)
Рис. 18 Сравнение напряжений, прикладываемых с помощью метода возбуждения синусоидальной волны и метода возбуждения 120 градусов
2.2.3. Характеристики
Характеристики скорости вращения и момента вращения бесщеточного двигателя постоянного тока имеют ограниченную область нагрузки в дополнение к области непрерывной работы.
Ограниченная рабочая зона очень эффективна при запуске инерционной нагрузки. Однако, когда работа в ограниченном режиме работы продолжается в течение пяти секунд или более, активируется функция защиты водителя от перегрузки, и двигатель замедляется до полной остановки.
2.3. Блок управления скоростью инвертора
2.3.1. Принцип управления скоростью
Инверторный блок управляет скоростью трехфазного асинхронного двигателя, изменяя частоту f напряжения, подаваемого на двигатель. Инверторный блок изменяет частоту f, изменяя цикл ВКЛ / ВЫКЛ шести переключающих элементов, а скорость вращения (N) двигателя изменяется пропорционально выражению в формуле (1).
N = 120 · f · (1- s ) / P ·· · · · · · · · · (1)
N : Скорость вращения [об / мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
Кроме того, чтобы напряжение, подаваемое на обмотку, имело синусоидальную форму, инвертор регулирует рабочий цикл ВКЛ / ВЫКЛ, как показано на рис.21. Время включения / выключения регулируется таким образом, чтобы среднее напряжение, приложенное к двигателю, приобретало форму синусоиды, путем сравнения треугольной волны, называемой несущим сигналом, с формой волны синусоидального сигнала. Этот метод называется ШИМ-управлением.
Рис.19 Дежурный контроль ВКЛ / ВЫКЛ
Метод управления скоростью наших инверторных блоков делится на два типа: управление с обратной связью, которое просто изменяет скорость, и управление с обратной связью, которое уменьшает изменение скорости при изменении нагрузки двигателя.
1) Управление без обратной связи
На рис. 22 показана конфигурация управления без обратной связи в виде блок-схемы.
Рис.20 Блок-схема управления без обратной связи
Этот метод используется для изменения входного напряжения и частоты двигателя в соответствии с заданной частотой. Этот метод подходит для изменения скорости и позволяет получить высокие скорости (частоту можно установить до 80 Гц) просто тогда, когда регулирование скорости с изменяющейся нагрузкой не представляет особой важности.
Создаваемый крутящий момент T двигателя показан формулой (2).Из этого соотношения можно сказать, что крутящий момент также будет постоянным, если сделать постоянным V / f, отношение напряжения V к частоте f.
T = K ・ I ・ V / f ・ ・ ・ (2)
T : Крутящий момент [Н · м]
V : Напряжение источника питания [В]
I : Ток двигателя [A]
f : Частота [Гц]
K : Постоянная
Однако чем ниже скорость, тем труднее поддерживать постоянным входное сопротивление асинхронного двигателя при изменении f.Следовательно, чтобы получить постоянный крутящий момент от низкой скорости к высокой скорости, необходимо отрегулировать отношение V / f на низкой скорости в соответствии с характеристиками двигателя, как показано сплошной линией на рисунке 23.
Рис.21 Контроль U / f
2) Управление с обратной связью
На рис. 24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF.
Рис.22 Блок-схема управления по замкнутому контуру
Этот метод определяет разность фаз между напряжением выходного блока инвертора и первичным током, который вычисляет частоту возбуждения, соответствующую нагрузке, используя таблицу характеристик данных (рис.25), подготовленный заранее, и регулирует частоту инвертора без необходимости в датчике скорости на двигателе.
Рис.23 Таблица данных характеристик
Используя эту таблицу характеристик и время t обнаруженной разности фаз, инвертор вычисляет выходную частоту инвертора, которая соответствует команде Nset скорости вращения, установленной потенциометром скорости, и выводит ее как выходную частоту инвертора. После получения выходной частоты блок управления U / f вычисляет напряжение, приложенное к двигателю, соответствующее выходной частоте f, и выполняет управление скоростью, управляя инвертором PWM.В результате при приложении нагрузки выходная частота инвертора увеличивается, так что уменьшение скорости вращения может быть компенсировано. (3)
2.3.2. Характеристика с
Характеристики скорости вращения-момента инверторного блока показаны на рис. 26 и 27. Как поясняется в разделе «Двигатель, регулирующий скорость переменного тока», на характеристике крутящего момента нарисована «линия безопасной работы». Эта линия представляет предел для непрерывной работы, а область под этой линией называется областью непрерывной работы.
Рис.24 Характеристики скорости вращения и момента для управления без обратной связи
Рис.25 Характеристики скорости-момента вращения для замкнутого контура управления
3. Резюме
Oriental Motor предлагает три группы продуктов (двигатели с регулировкой скорости переменного тока, бесщеточные двигатели с регулировкой скорости постоянного тока и инверторные блоки) для использования в широком диапазоне приложений регулирования скорости. Подходящий продукт для регулирования скорости можно выбрать в соответствии с функцией, производительностью, стоимостью и целью, которые требуются для вашего приложения.
Oriental Motor продолжит работу над разработкой продукции, чтобы в будущем мы могли предлагать продукцию, наилучшим образом отвечающую различным потребностям наших клиентов.
Список литературы
(1) Исследовательская группа по технологиям двигателей переменного тока: «Книга для понимания малых двигателей переменного тока», Kogyo Chosakai Publishing (1998).
(2) Казуо Абэ: «Технология бесшумного привода бесщеточного двигателя», RENGA № 163, стр. 19-25 (2003)
(3) Кодзи Намихана, Масаёши Сато: «Новый метод управления трехфазным асинхронным двигателем», RENGA No.159, стр. 23-28 (1999)
| Казуя Сирахата Завод Цуруока, Операции ACIX Подразделение схемотехники Секция разработки схем |
Информационный центр изготовителя ножей своими руками: направляющая для двигателя ленточно-шлифовального станка
У меня в блоге много вопросов о том, какие моторы работают на болгарки. Правда в том, что многие моторы будут работать, но одни лучше других. Еще есть двигатели, у которых есть свои проблемы.Вооружившись небольшой информацией, вы можете решить, подойдет ли двигатель для вашей ленточно-шлифовальной машины.В центре внимания этого эссе будут асинхронные двигатели переменного тока (AC), подобные тем, которые вы найдете на настольной пиле старой школы. (У меня еще одна тема – двигатель беговой дорожки постоянного тока.)
Асинхронные двигатели переменного тока
Первое, на что мы обращаем внимание при понимании двигателей, – это разные части и то, что они собой представляют. На рисунке ниже показан двигатель и его важные детали.
Хотя все эти детали важны, для нас нет ничего важнее, чем заводская табличка.
Заводская табличка
Когда дело доходит до определения двигателя, большинство важных вещей можно найти на паспортной табличке двигателя. Паспортная табличка – это этикетка или металлическая табличка, на которой указано название производителя, номер модели, напряжение, сила тока, скорость и мощность, а также другие данные, которые будут полезны при принятии решения о том, будет ли двигатель работать с вашим ленточно-шлифовальным станком.Это наш пример паспортной таблички двигателя: На паспортной табличке много информации. Давайте переварим некоторые важные части.Я нарисую красный прямоугольник на параметре, чтобы вы могли увидеть, как он может выглядеть на вашем двигателе.
Фазы
Когда речь заходит об асинхронных двигателях переменного тока, прежде всего следует обращать внимание на количество фаз. Если ваш двигатель однофазный, PH 1 или аналогичный, вы должны использовать однофазное (бытовое) напряжение для запуска двигателя. Это также означает, что об управлении скоростью двигателя практически не может быть и речи. Это не означает, что двигатель бесполезен, только то, что скорость ремня шлифовального станка будет фиксированной, если вы не добавите промежуточный вал со шкивом и ремень для регулировки скорости ремня.
Если параметр фаз – 3 или PH 3, то вам понадобится трехфазный (промышленный) источник напряжения, частотно-регулируемый привод или фазовый преобразователь для запуска двигателя. Мы обсудим это позже. В нашем примере у нас однофазный двигатель, так что давайте продолжим этот путь.
Напряжение
Производители двигателей указывают номинальное напряжение (В, В, U) на паспортной табличке, чтобы вы знали, к какому источнику питания подключать двигатель. Кроме того, американские производители двигателей используют стандарты NEMA и устанавливают напряжение 115, 230 или 460 вольт.Просто помните, что для наших целей ссылки на 110 вольт, 115 вольт или 120 вольт относятся к одному и тому же. Это все равно низко и высоко, но погоди! Что делать, если мотор 230/460? Что ж, high по-прежнему является более высоким из двух напряжений.
Номенклатура Примечание: Я использую 120 В или 240 В при описании напряжения питания. Почему? Я использую эти числа, поскольку они основаны на 12/24/48/120/240/480/600 и 208 (квадратный корень 3 умноженный на 120). Это признано стандартом поставки. Однако … некоторые люди (например, мой папа) все еще используют 110 В.Другие используют 115 В, и это нормально. Важно помнить, что 120 означает одно и то же, 110 или 115.
Национальная ассоциация производителей электрооборудования (NEMA) предполагает, что диапазон напряжения двигателя составляет плюс-минус 10% от напряжения, указанного на паспортной табличке. Таким образом, на паспортной табличке двигателя указано, что 115 В может подаваться с напряжением от 104 В до 126 В. На двигатель 230 В может подаваться напряжение от 207 В до 253 В. Вы можете видеть, что номера источников напряжения довольно нечеткие. при измерении в диапазоне 10% плюс или минус.
Двойное напряжение: Когда номинальное напряжение двигателя имеет косую черту, это означает, что двигатель может быть настроен для работы при различных напряжениях, довольно часто 115/230 В. ПРИМЕЧАНИЕ. Двигатель автоматически не знает, какое напряжение он будет работать в. Чтобы изменить напряжение, при котором двигатель должен работать, необходимо изменить проводку в клеммной коробке.
Будьте осторожны при оценке номинального напряжения двигателя. Некоторые двигатели не будут работать с имеющимся источником питания. Как правило, однофазные двигатели имеют одно напряжение 115 В.или двойное напряжение 115/230 В.
Трехфазные двигатели могут иметь различные напряжения, такие как 208 В, 230 В, 460 В или 575 В в Северной Америке и 220 В или 380 В в Европе / Азии. Если вы хотите использовать трехфазный двигатель с частотно-регулируемым приводом, убедитесь, что на паспортной табличке двигателя указано 230/460 В. Это обычное явление для двигателей NEMA. Однако некоторые двигатели имеют напряжение только 575 В! Для трехфазного двигателя 575 В потребуется частотно-регулируемый привод, которым нелегко управлять из дома без специального оборудования.
Амперы (ток)
Число в амперах – это ток, необходимый для работы двигателя.Он указывается в амперах (А, амперы, амперы, I, FLA, амперы полной нагрузки и т. Д.). Ток на паспортной табличке двигателя очень важен, поскольку он позволяет нам рассчитать, какой калибр (толщину) провода использовать, а также какой ток автоматического выключателя необходимо для работы двигателя.
Двигатели подвержены динамическим нагрузкам; то есть они не всегда потребляют одинаковое количество тока. Когда двигатель запускается, он может потреблять в пять раз больший рабочий ток. Вот почему кажется, что огни мигают, когда включается старый мотор компрессора холодильника.
Ток на паспортной табличке – это рабочий ток двигателя при номинальной мощности.
Двойной ток? Если в рейтинге тока имеется косая черта, например 7,6 / 15,2 , это означает, что номинальные значения тока указаны для двух разных напряжений, в данном примере 230/115. Ага, когда напряжение повышается, усилители падают.
Л.с. (Мощность)
Мощность асинхронного двигателя выражается в лошадиных силах (л.с.) или киловаттах (кВт). Лошадиная сила – это обычно используемая единица измерения в Северной Америке, тогда как в остальном мире используется киловаттная единица Международной системы единиц (СИ).
Одна лошадиная сила равна 0,746 киловатт, если вам нужно выполнить преобразование.
Асинхронные двигатели производятся от дробных значений мощности от 1/3 до нескольких тысяч лошадиных сил. Для приличной ленточно-шлифовальной машины 2 x 72 дюйма мы ищем в идеале от 1 до 3 лошадиных сил, а предпочтение отдается от 1,5 до 3 лошадиных сил. Мотор должен иметь достаточную мощность для эффективного заточки ножей и общих задач по формовке металла.
Техническая публикация, которую я прочитал несколько лет назад от немецкого производителя абразивных материалов Klingspor, рекомендует от 1 до 5 л.с. на дюйм ширины ленты.Поскольку мы работаем с ремнями шириной 2 дюйма, этот диапазон составляет от 2 до 10 л.с.! К счастью, эмпирические данные показывают, что ленточные шлифовальные машины 2 x 72 дюйма весьма полезны (хотя и немного неэффективны) при 1 л.с. чрезвычайно способный на 1,5 л.с. и потрясающий на 2 или 3 л.с.!
Об / мин (скорость)
Скорость асинхронного двигателя зависит от количества полюсов (или обмоток), встроенных в него производителем. Чем больше у двигателя полюсов, тем медленнее он будет вращаться с заданной частотой. Двухполюсные двигатели работают быстро, а четырехполюсные – вдвое меньше.В Северной Америке на паспортной табличке двигателя скорость вращения составляет примерно 1725 об / мин или 3450 об / мин при номинальной нагрузке.
Иногда мы находим даже более медленные шестиполюсные двигатели, которые вращаются со скоростью чуть менее 1200 об / мин, и восьмиполюсные двигатели, которые вращаются со скоростью около 900 об / мин.
Шестиполюсные и восьмиполюсные двигатели не очень полезны для шлифовальной машины с прямым приводом, так как они работают слишком медленно и требуют очень больших приводных колес, чтобы поддерживать скорость ленты в приемлемом диапазоне. Они могут лучше подходить для других применений, таких как хонингование, заточка или полировка, где более низкие скорости полезны для уменьшения тепла от трения.
Синхронная скорость двигателя часто указывается производителем. Пример 1800 об / мин или 3600 об / мин. Это последовательный способ описания скорости двигателя без учета нагрузки или скольжения.
Вот синхронные скорости при 60 Гц для обычных асинхронных двигателей.
Для источника питания 50 Гц в приведенной выше таблице будет указано 3000, 1500 и 1000 об / мин.
Не беспокойтесь, если на паспортной табличке вашего двигателя указано немного меньше 3600 или меньше 1800. На паспортных табличках указано число оборотов в минуту, когда двигатель находится в условиях нагрузки.Каждый асинхронный двигатель должен проскальзывать, то есть не синхронизироваться с напряжением питания. Когда двигатель свободно вращается без нагрузки, скольжение невелико. По мере увеличения давления на ремень двигатель замедляется и увеличивается скольжение. только под нагрузкой частота вращения будет 3450 или 1740.
Есть несколько менее распространенных однофазных двигателей, которые являются двух- и четырехполюсными двигателями в одной раме. Эти двигатели могут работать со скоростью около 3600 или 1800 об / мин и обычно используются в водяных насосах для гидромассажных ванн. Если вы можете решить проблему с валом насоса, вы можете легко получить однофазную низко / высокоскоростную шлифовальную машину с щелчком переключателя.
Обороты двигателя имеют большое влияние на скорость движения ленты. Для установки с прямым приводом, то есть приводного колеса, прикрепленного к валу двигателя, это очень важно.
На схемах ниже показаны колеса с прямым приводом трех разных размеров, 4 дюйма (100 мм), 5 дюймов (125 мм) и 6 дюймов (150 мм), а также их соответствующие скорости ремня в футах в минуту при движении от четырех полюсный двигатель при 60 Гц.
И те же варианты ведущего колеса, приводимые в движение двухполюсным двигателем с частотой 60 Гц.
SF (коэффициент обслуживания)
Фактор обслуживания, иногда обозначаемый как SF, является множителем, который показывает, насколько двигатель может превышать номинальный ток в течение короткого периода времени. Например, коэффициент обслуживания 1,4 означает, что двигатель может временно работать при 140% от номинального тока. Это не должно быть непрерывным, скорее SF полезен для расчета тока, чтобы довести нагрузку, такую как маховик или конвейерная система, до скорости, так как это может потребовать большего обслуживания, кабелей, переключателей и так далее.В случае нашей паспортной таблички SF A (коэффициент обслуживания в амперах) указан как 7,6 / 15,2, что означает, что этот двигатель может потреблять 7,6 A при 230 В или 15,2 при 115 В на короткие периоды.
SF не представляет большого беспокойства для ленточно-шлифовальных машин, поскольку шлифовальные машины обычно запускаются при небольших нагрузках и быстро набирают обороты.
Время (Дежурный)
Параметр времени или режима на паспортной табличке указывает, должен ли двигатель работать непрерывно или с перерывами. Некоторые двигатели предназначены для постоянной работы, в то время как другие двигатели специального назначения предназначены для периодов отдыха, когда двигатель может охлаждаться. Непрерывная работа Двигатели имеют код S1 или CONT. Двигатели, которые не предназначены для постоянной работы, будут иметь коды, такие как S2, или указывать время работы в минутах, например, 30 или 60. В идеале вам нужен двигатель, который может непрерывно работать без проблем с перегревом.
Температура
Номинальная температура двигателя обозначается как температура или окружающая среда и обычно указывается в градусах Цельсия. Температура обычно не является проблемой для гаража или мастерской.Не помещайте двигатель в замкнутом пространстве, где может накапливаться тепло. Если вы живете в безумно жарком месте, возможно, вам придется снизить мощность двигателя. Примером снижения мощности может быть двигатель мощностью 2 л.с. при 40 ° C, который следует рассматривать как двигатель мощностью 1,5 л.с. при температуре окружающей среды 50 ° C. Держите мотор в свободном движущемся воздухе, чтобы избежать перегрева.
При работе двигателей на более низких, чем предполагалось, скоростях это становится более серьезной проблемой. Подробнее см. Ниже в разделе о Герцах.
Класс изоляции
Электропроводка внутри двигателя изолирована и может выдерживать довольно высокие температуры.Чем выше температура изоляции, тем лучше будет проводка выдерживать перегрузки. Класс A подходит для температуры чуть выше кипения, но класс H на 75 ° C (167 ° F) лучше, чем класс A. Опять же, по большей части изоляция не является проблемой для ленточно-шлифовальных машин, если вы не загружаете двигатель. в течение некоторого времени и выделяет достаточно тепла, чтобы превысить класс изоляции.
Это таблица классов изоляции от A до H и их номинальных температур в ° C и ° F.
Герц (Гц)
Рейтинг в Герцах говорит нам, для какой частоты питания производитель разработал двигатель.Обычно это 60 Гц для Северной Америки и 50 Гц для Европы / Азии. Герцы или номинальная частота напрямую связаны с номинальной частотой вращения или скоростью; то есть тот же двигатель будет работать быстрее при частоте 60 Гц, чем 50 Гц. Разница в скорости между Северной Америкой и Европой составляет 50, разделенные на 60, или 5/6, или 0,833.
Синхронные скорости на двигателях 50 Гц будут чуть ниже 3000 и 1500 об / мин. Примечание. Это может повлиять на выбранную вами конфигурацию ведущего колеса или шкива.
Значение в герцах становится более важным и для охлаждения двигателя.Скорость вращения двигателей ниже номинальной, очевидно, приводит к замедлению вращения вентилятора двигателя. Это влияет на общее охлаждение и может вызвать перегрев двигателя. Небольшое замедление вентилятора может вызвать сильное падение потока воздуха. См. Законы сродства.
Рама
Код рамы сообщает нам о физических свойствах двигателя, включая размер, размеры монтажных отверстий и диаметр вала. Код рамы не передает никакой информации о мощности, однако, как правило, чем больше номер рамы, тем мощнее может быть двигатель.
56
Двигатель с рамой 56 будет иметь отверстия для крепления лап на валу диаметром 3 дюйма x 4-7 / 8 дюйма и 5/8 дюйма (0,625 дюйма).
143T
Двигатель с рамой 143T больше, чем с рамой 56, и имеет монтажные отверстия для лап размером 4 дюйма x 5-1 / 2 дюйма и вал диаметром 7/8 дюйма.
145T
Двигатель с рамой 145T больше, чем рама 143T, и имеет отверстия для опоры размером 5 x 5-1 / 2 дюйма и вал диаметром 7/8 дюйма.
Есть некоторые особые ароматы, такие как 56J, который имеет вал 5/8 дюйма, но на конце имеет резьбу с NF 7/16 дюйма.Они используются для крепления рабочих колес насоса. Вам нужен двигатель с рамой 56, 143 или 145 зубьев, так как они хорошо подходят для ленточно-шлифовального станка.
Корпуса двигателей
Двигатели полностью закрытого типа с вентиляторным охлаждением
Некоторые моторы защищены от пыли и влаги, а другие нет. Герметичные двигатели называются двигателями « Totally Enclosed Fan Cooled » или сокращенно TEFC. В среде, где плавает металлическая пыль, двигатель TEFC – лучший выбор.В двигателе TEFC вентилятор находится вне герметичного двигателя и обдувает корпус двигателя воздухом, чтобы двигатель оставался холодным.Решетка из перфорированной крышки защищает вентилятор и не дает возможности засунуть в него руку.
Двигатели
TEFC более дорогие, чем их открытые аналоги, потому что им требуется большая масса, в некоторых случаях внешние ребра и т. Д. Для охлаждения двигателя. Есть и другие варианты герметичного двигателя с немного другими акронимами. Есть полностью закрытые двигатели с естественной вентиляцией (TENV), у которых нет внешних вентиляторов. Двигатели TENV обычно имеют меньшую мощность, если нагрев не является существенным фактором.
Открытые моторы
Незапечатанные двигатели обычно обозначаются как « Open» или « Open Drip Proof ». Открытые двигатели, двигатели с защитой от капель или с ODP охлаждаются внутренним вентилятором, втягивающим воздух внутрь корпуса двигателя и удаляющим воздух вместе с теплом. К сожалению, открытые двигатели также пропускают пыль и влагу внутри двигателя, поэтому они не лучший выбор для ленточно-шлифовальных машин. Попадание металлической пыли в электрическую часть двигателя – это плохо. Неофициальные данные свидетельствуют о том, что некоторая защита, такая как пылезащитный кожух, и периодическое обслуживание, такое как продувка двигателя сжатым воздухом, продлевают срок службы открытых двигателей в довольно суровых условиях.Помните, что у вас работают мощные электромагниты, и стальная пыль рано или поздно попадет в магнетизм.На некоторых шильдиках ODP может быть написано «Защита от капель только в вертикальном положении», что означает, что двигатель предназначен для использования в вертикальном положении, например в сверлильном станке, где капающая вода не будет проблемой для электрических частей мотор.
Инвертор номинальный
Двигатель с инверторным номиналом предназначен для работы с инвертором или частотно-регулируемым приводом. ЧРП не создают идеального напряжения.На выходе частотно-регулируемого привода возникают всплески шума, которые могут вызвать повреждение или прокол изоляции внутри двигателя. Эти проблемы более выражены при подключении к двигателю длинных кабелей.Всегда лучше иметь двигатель с номиналом инвертора для использования с частотно-регулируемым приводом, но так ли это необходимо? Для большинства из нас … нет. Типичные трехфазные двигатели имеют изоляцию на 460 В, и мы обычно эксплуатируем эти двигатели с частотно-регулируемым приводом на 230 В и используем короткие кабели двигателя.
Валы двигателя
Двигатели имеют несколько различных конфигураций вала и соответствуют стандартам NEMA.В двигателях с меньшей рамой будет использоваться вал 3/8 дюйма с плоским пятном для установки установочного винта. Двигатели рамы 56 имеют вал диаметром 5/8 дюйма, который может иметь шпонку (или резьбу в случае 56J). Рамы большего размера 143T и 145T имеют валы со шпонкой 7/8 дюйма. Даже более крупные двигатели серии 180 могут поставляться с валом 1-1 / 8 дюйма. Обязательно найдите размер рамы и вала в таблице размеров NEMA.Наиболее распространенные двигатели, с которыми вы столкнетесь, будут иметь валы, как показано на рисунке ниже.
Производители шлифовальных кругов обычно предлагают в ведущих колесах три или четыре диаметра отверстия.Опрос продавцов на eBay показывает, что это обычно доступные отверстия для ведущих колес. 5/8 “, 3/4”, 7/8 “и некоторые предлагают 24 мм для двигателей IEC. Если вы планируете использовать колесо с прямым приводом, а не систему передачи шкив / ремень / вал, вам понадобится двигатель, вал которого совместим с общедоступными ведущими колесами. См. таблицу ниже.
См. Таблицу двигателей NEMA для размера «U».
Длина
Длина вала важна для ленточно-шлифовальных машин.Длина вала 2 дюйма или более предпочтительна, поскольку нам потребуется установить ведущее колесо шириной 2 дюйма. У NEMA 56, 143T и 145T валы «выступают» более чем на 2 дюйма. Двигатели с валом менее 2 дюймов можно использовать с подходящими удлинителями.
Диаметр
Как правило, более мощные двигатели имеют больший диаметр вала. Стандарт NEMA для двигателей определяет это. Валы меньшего размера 3/8 дюйма и 1/2 дюйма предназначены для применения с дробной мощностью, в то время как 5/8 дюйма, 7/8 дюйма и 1-1 / 8 дюйма можно найти на двигателях с большей рамой.
Есть ключи?
Требуется способ крепления колеса к валу двигателя. В двигателях меньшего размера вал может иметь D-образную форму, а установочный винт на колесе или шкиве будет контактировать с плоским местом и обеспечивать безопасность колеса.Двигатели с более крупной рамой обычно имеют паз, называемый шпоночным пазом.
Для валов со шпонкой 5/8 дюйма и 7/8 дюйма используется шпоночный пруток 3/16 дюйма. На валах меньшего размера 1/2 дюйма обычно имеется плоская часть вала для установочного винта.
Шкив / шкив будет иметь паз под шпонку, как и вал двигателя.
Шпоночные пазы в валу и колесе или шкиве механически фиксируются куском квадратной стали, так называемым ключом. Гениально! Большинство хозяйственных магазинов продают ключницы.
Странности
Многие двигатели не имеют простых в использовании валов. В двигателях для специальных применений, таких как насосы, не предусмотрены установочные винты или ключи. Скорее, конец вала с резьбой должен использоваться для крепления рабочего колеса или другого типа колеса.На этой фотографии показан открытый двигатель с валом, предназначенным для винта на маховике.
Читатель (спасибо Дэн Харгроув) прислал мне эту фотографию его милого маленького Marathon 56 frame TEFC мощностью 1 л.с. Но … что это, черт возьми, за вал?
Эти специально изготовленные валы потребуют некоторой адаптации; возможно, прокладки или, возможно, шлифовка и протяжка шпоночных пазов самостоятельно. Читайте: много работы, но если вы получаете этот странный мотор по дешевке, это может стоить вашего времени. Я хотел бы услышать ваши истории о необычных валах двигателей и о том, как вы заставили их работать.
Крепление двигателя
Двигатели обычно крепятся болтами через монтажную лапку или через торцевую часть (где выходит вал) двигателя.Для некоторых двигателей возможна установка как на лапах, так и на торце.
C Лицевая сторона Торцевые двигатели называются « C Face» . Обычно вокруг торца имеется четыре точки крепления с резьбой.Преимущество торцевого монтажа C состоит в том, что двигатель закреплен на раме шлифовальной машины, и проблемы центровки могут быть сведены к минимуму. Для рамок NEMA 56, 143T и 145T отверстия для торцевого монтажа имеют диаметр 5,875 дюйма или радиус 2,94 дюйма при измерении от центра вала.Я поместил это в AutoCAD и сделал рисунок ниже, показывающий размеры от центра к центру, который может лучше работать для некоторых людей, проектирующих раму для крепления двигателя C-образной формы.
Болты для торцевого монтажа NEMA C обычно имеют размер 3/8 “NC x 0,75”. Конечно, всегда проверяйте монтажную конфигурацию двигателя перед покупкой крепежа. Крепление на лапах Монтаж на лапах – это место, где в пластине или литой раме под двигателем есть отверстия для крепления. путем прикручивания опоры двигателя к поверхности.
Предполагается, что ножка прикручена к стальной пластине, к которой прямо прикреплена рама шлифовального станка, но это также может быть рабочий стол или плита из толстой фанеры. Двигатель может слегка наклоняться в опорах для ног, поэтому необходимо следить за тем, чтобы вал двигателя был перпендикулярен (90 °) пути движения ремня в двух измерениях.
Однофазные двигатели
Однофазные двигатели не имеют внутри вращающегося магнитного поля, скорее вы можете подумать, что оно переменное. Поскольку однофазное напряжение разнесено на 180 °, двигатель просто будет вибрировать при подаче питания, поскольку он не знает, в какую сторону повернуться.Чтобы «подтолкнуть» двигатель в нужном направлении, часто используется конденсатор.
“Удар” конденсатора – это контрольный признак однофазного двигателя.
Конденсатор используется для ослабления одного или нескольких магнитных полей, чтобы двигатель начал вращаться в предсказуемом направлении.
Оставление конденсатора запитанным во время работы двигателя делает двигатель неэффективным, поэтому используется переключатель для отключения конденсатора из цепи, когда двигатель набирает скорость.Звуковой щелчок, который можно услышать при запуске и остановке двигателя, – это центробежный переключатель, который включает конденсатор в цепь или из нее.
В зависимости от конструкции на некоторых однофазных двигателях вы увидите два выступа конденсатора. Один конденсатор является пусковым, а другой – рабочим. В отличие от пускового конденсатора, рабочий конденсатор остается подключенным после пуска, пока двигатель работает.
Рекомендации по тестированию и обслуживанию конденсатора и переключателя однофазного двигателя см. В отличном видео Grizzly Industrial по этой теме.https://www.youtube.com/watch?v=M-j6PhthXJY
Одним из недостатков использования однофазного двигателя на кофемолке является то, что вы не можете контролировать скорость двигателя, так как она задается частотой напряжение питания, скажем 60 Гц или 50 Гц в зависимости от того, где вы живете.
Конечно, изменение скорости ремня может быть достигнуто с помощью различных соотношений шкивов (шкивов), но сам двигатель имеет только одну скорость. Еще одно частое исключение – двухскоростной насосный двигатель, используемый в гидромассажных ваннах.Этот тип двигателя будет двухполюсным и четырехполюсным, с проводами, идущими к клеммной коробке, для изменения скорости. Например, скорости будут 1800 или 3600 об / мин.
Обратимый?
Однофазные двигатели не всегда реверсивны. Говорят, что двигатели вращаются вперед, когда вал вращается против часовой стрелки (CCW), если смотреть с лица. То есть смотреть на вал, на котором будет крепиться колесо.Некоторые конструкции однофазных двигателей нереверсивны. Это определяется способом изготовления двигателя.Поскольку нет ничего невозможного, некоторые люди вытаскивают ротор из двигателя и устанавливают его в обратном порядке. Как там реверсивный и нереверсивный мотор. Всегда есть способ, если у вас есть время.
Многие однофазные двигатели можно реверсировать, заменив два провода в клеммной коробке. См. Схему подключения на паспортной табличке или внутри клеммной коробки. Это будет означать что-то вроде «для обратного вращения поменяйте местами красный и черный провода».
Если ваш двигатель нереверсивный, его все же можно использовать, переставив двигатель относительно ремня.
Однофазное питание
Практически каждый будет иметь однофазное 120 В в мастерской или гараже. Однофазная энергия – это энергия, которую мы получаем в наших домах. Общие схемы могут позволить нам без проблем запускать асинхронный двигатель мощностью 1 л.с., если мы «выделяем» схему для работы этого одного двигателя; то есть не использовать эту цепь вместе с лампами и другим оборудованием в магазине.На каждой паспортной табличке двигателя будет указан ток в амперах, потребляемый при полной нагрузке двигателя.Для запуска двигателя требуется гораздо больший ток. В некоторых случаях в пять раз превышает ток, указанный на паспортной табличке.
Для некоторых двигателей мощностью 1 л.с. при 120 В может потребоваться автоматический выключатель на 20 А, даже если на заводской табличке указано 14,4 А.
Однофазный также представлен двумя линиями на 120 В. При совместном использовании они увеличивают вдвое напряжение до 240 В. Удвоив напряжение, мы можем использовать провода и автоматические выключатели меньшего размера и при этом выполнять ту же работу. Использование двигателя мощностью более 1,5 лошадиных сил означает, что вам действительно нужно иметь доступное напряжение 240 В.
Определение объема поставок
Понимание того, что у вас есть на поставку, – хорошее начало при поиске двигателя, который будет работать с вашей ленточно-шлифовальной машиной.Только для питания 120 В Одна цепь на 120 В в Северной Америке способна обеспечить как минимум 15 Ампер.
Новые правила делают схемы на 20 ампер более распространенными, особенно на кухнях.
- Обычно 1,5 л.с. максимум
- Требуется цепь на 20 А, предпочтительно предназначенная только для питания вашего двигателя.
- Малые частотно-регулируемые приводы доступны с входами 120 В, обычно мощностью 1 л.с. или меньше.
- Использует розетку и вилку NEMA 5.
Для питания 240 В Источник питания 240 В использует две линии по 120 В и предлагает гораздо большую мощность и более широкий выбор вариантов подключения. Могут быть доступны цепи от 15 до 50 ампер. Цепи на 240 В могут выполнять вдвое большую работу, чем цепь на 120 В, и поэтому они используются для питания более тяжелых нагрузок, таких как плита или сварочный аппарат.Цепи 240 В могут использоваться в шлифовальных машинах на:
- однофазных двигателях от 1 до 5 лошадиных сил
- ЧРП с трехфазными двигателями мощностью от 1 до 5 л.с.
Использование источника питания 240 В также означает:
- более низкий ток означает меньшую проводку и автоматические выключатели, выполняющие ту же работу.
- Требуются розетки и вилки NEMA 6.
Переключатели с номинальным двигателем
Для безопасного включения и выключения двигателя вам необходимо использовать переключатель, способный регулировать напряжение и ток двигателя.Для двигателей требуются более надежные переключатели, чем для освещения или других простых нагрузок. Когда вы отключаете питание двигателя, он сопротивляется и производит дугу (искру), которая может повредить или даже сварить контакты переключателя. На переключателях с номинальным двигателембудет указана мощность в лошадиных силах. Что-то вроде 3/4 HP при 125/250 В переменного тока.
Однополюсные переключатели размыкают / замыкают один контакт. Это ваш основной выключатель света. Их можно использовать до 1 лошадиных сил.
Двухполюсные переключатели размыкают / замыкают два контакта.Они подходят для переключения однофазных двигателей на 240 В.
Трехполюсные переключатели размыкают / замыкают три контакта. Они предназначены для переключения трехфазных двигателей. Однако, если переключатель является только механическим (например, внутри нет электромагнитной удерживающей цепи), вы можете использовать один или два из трех полюсов для однофазных приложений.
По мере того, как двигатели становятся крупнее, для выполнения тяжелых переключений используется контактор. Контактор – это по сути реле, поскольку у него есть катушка и контакты, которые перемещаются электромагнитом.
Термовыключатели
Некоторые двигатели имеют встроенные термовыключатели, иногда называемые выключателями перегрузки. Эти переключатели размыкаются, как автоматический выключатель, когда они становятся слишком горячими. Тепло исходит от тока, протекающего через переключатель и двигатель. Когда двигатель работает с большей нагрузкой, он потребляет больше тока, и нагрев термовыключателя увеличивается. Если двигатель (и термовыключатель) не охлаждается, термовыключатель неизбежно размыкается и останавливает двигатель, защищая его от перегрева.По соображениям безопасности эти термовыключатели должны быть сброшены вручную, чтобы избежать запуска двигателя, когда это не ожидается.Кабель
Хотя это руководство не предназначалось для использования в качестве руководства по электромонтажу, важно знать, какой вид провода подходит для подключения оборудования, такого как ленточно-шлифовальные машины.Самый популярный кабель для электромонтажа – SJOOW. Считается портативным шнуром питания. Он имеет гибкую резиновую оболочку, устойчивую к погодным условиям и маслам. SJOOW рассчитан на 300 вольт. Отдельные провода внутри многожильные, что делает его более гибким.Вы можете найти его в широком диапазоне калибров и купить пешком во многих строительных магазинах. Аналогичный кабель SOOW рассчитан на 600 Вольт и также может быть использован.
Более прочный кабель – это армированный кабель, известный в торговле как BX. Это та знакомая спиральная броня, которую мы все видели. С внутренней стороны сплошные медные провода в термопластической изоляции, очень похожие на обычные провода домашней электропроводки NMD.
Проводники
Проводник – это другое название провода. Кабель, обозначенный как 3 / C, означает, что он имеет 3 проводника.В Северной Америке это обычно один черный, один белый и один зеленый. Кабель, обозначенный как 4 / C, может иметь внутри красный, черный, белый и зеленый провода.
Трехфазные двигатели
Трехфазные двигатели, хотя и схожи по конструкции с однофазными двигателями, имеют разнесение обмоток на 120 °. Двигатель всегда начинает двигаться в том же направлении, в котором источник определяет вращение. У трехфазных двигателей нет необходимости в конденсаторах . Следует отметить, что любой трехфазный двигатель можно реверсировать, поменяв местами любые два провода, питающие двигатель.
Для ленточно-шлифовальных машин можно использовать многие трехфазные двигатели. Самым большим препятствием для трехфазных двигателей является то, что у большинства из нас нет трехфазного напряжения в наших магазинах, у нас однофазное. Простое решение проблемы отсутствия трех фаз – использование частотно-регулируемого привода (VFD).
Частотно-регулируемые приводы
Частотно-регулируемый привод или VFD, иногда называемый инвертором , приводом с регулируемой скоростью (VSD), приводом с регулируемой скоростью (ASD) и т. Д., Представляет собой электронное устройство, которое создает три фазы с по привод трехфазный двигатель .Этот тип частотно-регулируемого привода НЕ РАБОТАЕТ С ОДНОФАЗНЫМИ ДВИГАТЕЛЯМИ!Концепция VFD как преобразователя фазы отлично подходит для использования дома и в гараже. Мы даем ему одну фазу, а ЧРП выдает три фазы для работы трехфазного двигателя.
ЧРП должен приводить в действие трехфазный двигатель. Однофазные двигатели, как мы знаем, имеют другую конструкцию и не должны питаться от частотно-регулируемого привода.
Конечно, VFD не так дешев, как выключатель питания, однако преимуществ много. Использование частотно-регулируемого привода означает, что у нас есть возможность электронного управления скоростью, направлением, ускорением, замедлением и многими другими рабочими аспектами трехфазного двигателя, что делает его действительно гибкой системой подачи мощности.Для производителя ножей это означает холодную полировку на медленной скорости и высокую скорость для агрессивного удаления материала в одном пакете. Размер
Для однофазных приводов 120 В ожидается максимальная мощность 1,5 лошадиных сил.
Для однофазного двигателя 240 В ожидается максимальная мощность 5 лошадиных сил, однако некоторые модели будут развивать мощность только около 3 л.с. Этот диапазон частотно-регулируемых приводов 240 В очень полезен в качестве преобразователя однофазного в трехфазный, что идеально подходит для шлифовальной машины с регулируемой скоростью, построенной в магазине.
При использовании однофазных двигателей необходимо учитывать требуемый ток. Может показаться удобным иметь двигатель мощностью 1,5 лошадиных силы на частотно-регулируемом приводе с входным напряжением 120 В, верно? Нет необходимости в 240 В! Имейте в виду, что входной ток для этой машины может составлять 24 А. Это немного больше, чем в средней цепи. Высокий входной ток является результатом более низкого входного напряжения (120) и того факта, что частотно-регулируемый привод должен сделать три фазы из одной фазы. При использовании частотно-регулируемого привода аналогичной мощности, рассчитанного на 240 В, входной ток будет вдвое меньше, до 12 А.Это означает, что можно использовать меньшую проводку и автоматический выключатель.
Момент
Крутящий момент – это сила вращения. Некоторые нагрузки требуют большего крутящего момента двигателя, чем другие. В асинхронных двигателях крутящий момент обратен скорости, но мощность в лошадиных силах не зависит от скорости. Имея это в виду, мы можем думать о четырехполюсном (1800 об / мин) двигателе, который имеет в два раза больший крутящий момент, чем двухполюсный (3600 об / мин) с той же номинальной мощностью. Или, когда скорость увеличивается, крутящий момент падает на заданную мощность. Имеет ли это значение для ленточно-шлифовальных машин? Не совсем.Ленточные шлифовальные машины, как правило, являются машинами с низким моментом инерции. Когда ремень движется со скоростью, требование большого крутящего момента падает. Проблемы возникают у шлифовальных станков с контршами, жесткими подшипниками и колесами большого диаметра. Все они нагружают двигатель, и в двухполюсных двигателях меньшей мощности (3/4 или меньше) крутящего момента двигателя может быть недостаточно для преодоления сопротивления, и двигатель будет в состоянии остановки. (Это очень плохо для двигателя.) Один из примеров двигателя мощностью 2 л.с. при 1800 об / мин предложит 5.8 фунт-фут крутящего момента.
В то время как двигатель мощностью 2 л.с. и 3600 об / мин обеспечивает крутящий момент 2,9 фунт-фут.
Формула для крутящего момента в фунт-футах:
Крутящий момент = мощность x 5252 / об / мин
VFD могут управлять крутящим моментом двигателя и могут запускаться при очень высоких нагрузках или поддерживать тот же крутящий момент в широком диапазоне. скоростей. Такие функции, как «увеличение крутящего момента» и «постоянный крутящий момент», программируются в большинстве современных частотно-регулируемых приводов. Однако, как всегда, есть компромисс. Когда мы увеличиваем скорость вращения выше нормальной, крутящий момент начинает падать.К счастью, это обычно не проблема, так как к тому времени ваш пояс уже поднят и свистит. Кривая ниже синего цвета показывает, как падает крутящий момент в двигателе, когда частотно-регулируемый привод превышает нормальную рабочую частоту двигателя.
Скорость ленты
Последнее соображение – убедиться, что вы получаете подходящую скорость ленты (количество футов в минуту или метров в секунду), необходимую для шлифования, которое вы хотите выполнить. Ремни по-разному ведут себя на разных скоростях. Многие производители абразивных материалов публикуют рекомендованные скорости ленты для шлифования материалов с их продуктами, а некоторые из них удивительно быстрые.Производитель ремня нередко предлагает 5000 SFM (25 м / сек). Это может быть немного пугающим, когда ремень движется в вашей руке со скоростью 55 миль в час.В качестве практического диапазона для изготовления ножей я бы посоветовал от 2500 до 4000 футов в минуту. Несколько примеров прямого привода позволят нам попасть в этот диапазон.
1). 2-полюсный (3600 об / мин) двигатель с 4-дюймовым ведущим колесом будет развивать наземную скорость около 3700 sfm.
2). 4-полюсный (1800 об / мин) двигатель с 6-дюймовым ведущим колесом будет развивать наземную скорость около 2800 SFM.
Вот почему 6- и 8-полюсные двигатели не очень полезны без некоторого передаточного числа промежуточного вала для увеличения скорости.
Вам понадобится ведущее колесо большего размера, чтобы компенсировать более медленный двигатель. Колеса стоят денег, а колеса большего размера стоят больших денег, поэтому имеет смысл поискать двухполюсный двигатель или двигатель с частотно-регулируемым приводом, в котором вы можете создать необходимую скорость, используя меньшее колесо.
Идеал Моторс
До сих пор мы рассмотрели множество параметров двигателей, и стало ясно, что некоторые двигатели лучше других подходят для сборки измельчителя. Ultimate
Трехфазный
230 В переменного тока
TEFC
От 1,5 до 3 лошадиных сил
2 полюса (3600 об / мин)
Колесо с прямым приводом 4 дюйма
Частотно-регулируемый привод
Выбор № 2
TEFC
115/230 В переменного тока
1 до 2 лошадиных сил
4 полюса (1800 об / мин)
Контрвал с 4-дюймовым ведущим колесом
Выбор № 3
TEFC
230 В переменного тока
От 1,5 до 3 лошадиных сил
2-полюсный (3600 об / мин)
4-дюймовое колесо с прямым приводом
Выбор # 4
TEFC
115/230 В переменного тока
1.От 5 до 3 лошадиных сил
4 полюса (1800 об / мин)
6 “колесо с прямым приводом
Выбор № 5
ODP
От 1,5 до 3 лошадиных сил
2 полюса (3600 об / мин)
4″ колесо с прямым приводом
Выбор № 6
ODP
От 1,5 до 3 лошадиных сил
4 полюса (1800 об / мин)
Колесо с прямым приводом 6 дюймов
Предлагаемые комплекты
Этот комплект двигателя и частотно-регулируемого привода можно приобрести в Oregon Blade Maker.
Подходит для кофемолки, если у вас есть только напряжение 120 В.Также может быть подключено к сети 240 В.
Обратитесь к дилерам, специализирующимся на производстве двигателей, частотно-регулируемых приводов и комбинированных пакетов.
Часто задаваемые вопросы
Q: Могу ли я изменить скорость двигателя, изменив напряжение?A: Нет. Скорость асинхронного двигателя зависит от частоты источника питания 50 или 60 Гц и количества полюсов двигателя.
Q: Может ли однофазный двигатель работать с частотно-регулируемым приводом?
A: № Промышленные частотно-регулируемые приводы переменного тока предназначены для привода трехфазных двигателей.
Q: Можно ли получить 230 В от частотно-регулируемого привода, который питается от 115 В на входе?
A: Да. Некоторые частотно-регулируемые приводы с дробной мощностью повышают напряжение со 115 В до 230 В. Однако они обычно не доступны для мощности более 1,5 лошадиных сил.
Q: Будет ли мой двигатель работать более эффективно при 240 В?
A: Нет. Мощность двигателя остается постоянной, независимо от того, подключен ли двигатель к напряжению 120 или 240 В.
Q: Могу ли я получить удвоенную мощность, подключив двигатель 115 В к 230 В?
A: Возможно на короткое время, прежде чем двигатель перегорит.Не делай этого. Если проводку двигателя можно поменять на 230 В, то ничего страшного. Однако мощность в лошадиных силах в этом случае увеличиваться не будет.
Q: Какой размер ведущего колеса я должен использовать с моим мотором?
A: Это зависит от числа оборотов вашего двигателя. Четырехполюсный двигатель с частотой вращения ~ 1800 об / мин должен иметь ведущее колесо диаметром 6 или 7 дюймов (или больше), тогда как двухполюсный двигатель вполне нормально работает с ведущим колесом 4 дюйма.
Q: У меня есть домкрат со ступенчатыми шкивами Как я могу предсказать, какой будет скорость ленты?
A: Существует инструмент, который поможет вам в расчетах.Калькулятор скорости ремня
Q: У меня открытый двигатель. Что я могу сделать, чтобы стальная пыль не попала внутрь?
A: Вы мало что можете сделать. Через двигатель всегда будет всасываться воздух, чтобы охладить его. Вы можете сделать кожух или кожух, если через двигатель проходит воздух, чтобы он не перегревался. Вы также можете периодически продувать двигатель сжатым воздухом.
Q: Мой мотор очень легко останавливается и иногда не заводится.
A: Проверьте правильность настройки напряжения на самом двигателе.Провод двигателя на 230 В, к которому приложено 115 В, может вращаться, но он не будет работать.
Q: Могу ли я использовать обычный выключатель света для включения и выключения однофазного двигателя?
A: Да, примерно до 1 лошадиных сил. Всегда рекомендуется использовать переключатель с указанием соответствующей мощности в лошадиных силах.
Q: У меня однофазный двигатель, у которого нет номинальной мощности. Как вы в этом разобрались?
A: Умножьте напряжение и ток, затем умножьте на 0.85, затем разделите на 746. Это приблизительно соответствует мощности в лошадиных силах. Пример: 115 В x 9,5 А x 0,85 = 928,928/746 = 1,24 л.с.
Q: Может ли мотор стиральной машины работать на ленточно-шлифовальный станок?
A: Нет. Это открытый двигатель и, как правило, его мощность слишком мала, чтобы его можно было использовать в ленточно-шлифовальном станке.
Q: У меня есть мотор от джакузи. Можно ли это использовать для приличной ленточно-шлифовальной машины?
A: Да, но вал двигателя, скорее всего, не будет иметь шпоночного паза и будет иметь конец с резьбой для рабочего колеса насоса.Потребуется немного повозиться, но это можно использовать.
Q: Стоит ли покупать двигатель с инверторным номиналом?
A: Это, конечно, было бы лучше, но не обязательно для коротких кабелей.
Q: Мой двигатель 115/230 Вольт, но у меня в гараже нет 230 В. Могу ли я получить максимальную отдачу от двигателя при 115 В?
A: Да. Двигатель будет производить ту же мощность при 115 В. Однако он будет потреблять вдвое больший ток. Убедитесь, что ваша проводка, переключатель и прерыватель исправны.
Q: Двигатель, который у меня есть, имеет на паспортной табличке надпись «нереверсивный». Могу ли я еще использовать это?
A: Да. Вам, вероятно, придется физически переставить двигатель, чтобы он работал вокруг фиксированного вращения.
Q: У меня есть однофазный двигатель, который просто сидит и гудит. Что с этим не так?
A: Это может быть неисправный пусковой конденсатор или центробежный выключатель. Попросите кого-нибудь проверить это с помощью мультиметра. Или ознакомьтесь с процедурами обслуживания здесь: https: // www.youtube.com/watch?v=M-j6PhthXJY
Q: Верно ли, что медленная работа двигателя может вызвать его перегрев?
A: Да, это возможно. Однако производители двигателей часто используют один и тот же вентилятор для 2-полюсного (3600 об / мин) и 4-полюсного (1800 об / мин) в данной линейке двигателей. Запуск 2-полюсной медленнее менее вреден, чем 4-полюсная медленнее. Запуск 2-полюсного двигателя на 1/2 скорости аналогичен запуску 4-полюсного двигателя на полной скорости.
Для справки ознакомьтесь с таблицей выбора двигателя:
Комментарии
Я надеюсь, что вы узнали кое-что об асинхронных двигателях переменного тока и о том, как они связаны со сборкой самодельной шлифовальной машины.Присоединяйтесь к беседе ниже и задайте вопрос, если он у вас есть.Всего наилучшего и счастливого гринда,
Дан
Введение в контроллер частотно-регулируемого привода для асинхронного двигателя
Введение
Однофазные асинхронные двигатели широко используются в бытовой технике и промышленных устройствах управления. Однофазный асинхронный двигатель с постоянным разделенным конденсатором (PSC) является самым простым и наиболее широко используемым двигателем этого типа.
По своей конструкции двигатели PSC однонаправленные, что означает, что они предназначены для вращения в одном направлении.Направление вращения можно изменить путем добавления дополнительных обмоток, внешних реле и переключателей или использования зубчатых передач. В этой идее мы подробно обсудим, как управлять скоростью двигателя PSC в обоих направлениях с помощью микроконтроллера PIC16F72 и силовой электроники.
Микроконтроллер PIC16F72 был выбран потому, что это один из самых простых и недорогих микроконтроллеров общего назначения, которые Microchip имеет в своем портфолио. Несмотря на то, что он не имеет аппаратных ШИМ для управления дополнительными выходами ШИМ со вставленной зоной нечувствительности, все ШИМ генерируются в прошивке с использованием таймеров и выводятся на выходные выводы общего назначения.
Что такое частотно-регулируемый привод?
Частотно-регулируемый привод или ЧРП – это способ, который позволяет управлять скоростью асинхронного двигателя путем подачи переменного напряжения питания переменного тока. Управляя выходной частотой переменного тока, можно управлять двигателем с разными скоростями в зависимости от требований. Это приводы с регулируемой скоростью, которые широко используются в промышленных приложениях, таких как насосы, системы вентиляции, лифты, приводы станков и т. Д. Это, по сути, энергосберегающая система.Поэтому первое требование – это генерировать синусоидальную волну с разными частотами для VFD.
Какая технология используется в ЧРП?
Это система, которая выдает выход переменного тока с переменной частотой для управления скоростью двигателя в соответствии с потребностями. Однофазные преобразователи частоты более распространены, поскольку большинство устройств работают от однофазного источника переменного тока. Он состоит из двухполупериодного мостового выпрямителя для преобразования 230/110 В переменного тока примерно в 300/150 В постоянного тока.Выходной постоянный ток от мостового выпрямителя сглаживается сглаживающим конденсатором большой емкости для удаления пульсаций переменного тока. Это постоянное постоянное напряжение затем подается в схему генерации частоты, образованную транзисторами MOSFET (металлооксидный полевой транзистор) / IGBT (биполярный транзистор с изолированным затвором). Эта схема MOSFET / IGBT принимает постоянный ток и преобразует его в переменный ток с переменной частотой для управления скоростью устройства.
Изменение частоты может быть достигнуто с помощью электронных схем или микроконтроллера.Эта схема изменяет частоту напряжения (ШИМ), подаваемого на привод затвора схемы MOSFET / IGBT. Таким образом на выходе появляется переменное напряжение переменной частоты. Микроконтроллер можно запрограммировать на изменение выходной частоты в соответствии с потребностями.
Система ЧРП:
Устройство переменной частоты состоит из трех частей, таких как двигатель переменного тока, контроллер и рабочий интерфейс.
Двигатель переменного тока, используемый в ЧРП, обычно представляет собой трехфазный асинхронный двигатель, хотя в некоторых системах используется однофазный двигатель.Обычно используются двигатели, предназначенные для работы с фиксированной скоростью, но некоторые конструкции двигателей обеспечивают лучшую производительность в VFD, чем стандартная конструкция.
Контроллер представляет собой твердотельную схему электронного преобразователя мощности для преобразования переменного тока в постоянный, а затем в квазисинусоидальный переменный ток. Первая часть – это секция преобразователя переменного тока в постоянный, имеющая двухполупериодный выпрямительный мост, обычно трехфазный / однофазный двухполупериодный мост. Этот промежуточный постоянный ток затем преобразуется в квазисинусоидальный переменный ток с помощью схемы переключения инвертора.Здесь MOSFET / IGBT-транзисторы используются для преобразования постоянного тока в переменный.
Секция инвертора преобразует постоянный ток в три канала переменного тока для привода трехфазного двигателя. Секция контроллера также может быть спроектирована так, чтобы обеспечить улучшенный коэффициент мощности, меньшие гармонические искажения и низкую чувствительность к переходным процессам входного переменного тока.
Управление вольт / Гц:
Схема контроллера регулирует частоту переменного тока, подаваемого на двигатель, с помощью метода управления вольт на герц. Электродвигатель переменного тока требует переменного подаваемого напряжения при изменении частоты для достижения заданного крутящего момента.Например, если двигатель рассчитан на работу от 440 вольт при 50 Гц, то переменный ток, подаваемый на двигатель, должен быть уменьшен до половины (220 вольт), когда частота изменяется на половину (25 Гц). Это регулирование основано на вольт / Гц. В приведенном выше случае соотношение составляет 440/50 = 8,8 В / Гц.
Другие методы управления напряжением:
Помимо управления вольт / Гц, для управления скоростью двигателя также используются более продвинутые методы, такие как прямое управление крутящим моментом или DTC, пространственно-векторная широтно-импульсная модуляция (SVPWM) и т. Д.Управляя напряжением в двигателе, можно точно контролировать магнитный поток и крутящий момент. В методе ШИМ инверторные переключатели генерируют квазисинусоидальную волну через серию узких импульсов с псевдосинусоидальной изменяющейся длительностью импульсов.
Рабочий интерфейс:
Этот раздел позволяет пользователю запускать / останавливать двигатель и регулировать скорость. Другие возможности включают реверсирование двигателя, переключение между ручным и автоматическим управлением скоростью и т. Д. Рабочий интерфейс состоит из панели с дисплеем или индикаторами и измерителями для отображения скорости двигателя, приложенного напряжения и т. Д.Для управления системой обычно предоставляется набор клавишных переключателей.
Встроенный плавный пуск:
В обычном асинхронном двигателе, включенном с помощью переключателя переменного тока, потребляемый ток намного превышает номинальное значение и может увеличиваться с увеличением ускорения нагрузки для достижения полной скорости двигателя. .
С другой стороны, в двигателе, управляемом частотно-регулируемым приводом, сначала применяется низкое напряжение с низкой частотой. Эта частота и напряжение увеличиваются с контролируемой скоростью для ускорения нагрузки.Это развивает крутящий момент, почти превышающий номинальное значение двигателя.
Коммутация двигателя с частотно-регулируемым приводом
:Частота и подаваемое напряжение сначала снижаются до контролируемого уровня, а затем продолжают снижаться до тех пор, пока оно не станет равным нулю и двигатель не отключится.
Прикладная схема для управления скоростью однофазного асинхронного двигателя
Этот подход относительно прост в том, что касается силовой цепи и цепи управления. На входной стороне используются удвоители напряжения, а на выходной стороне используется H-мост или двухфазный инвертор, как показано на рисунке 2.Один конец основной и пусковой обмоток подключен к каждому полумосту, а другой конец подключен к нейтральной точке источника питания переменного тока.
Для схемы управления требуется четыре ШИМ с двумя дополнительными парами с достаточной зоной нечувствительности между дополнительными выходами. Мертвая зона ШИМ – это PWM0-PWM1 и PWM2-PWM3. PIC16F72 не имеет ШИМ, разработанных на оборудовании для вывода нужным нам образом. Что касается VF, шина постоянного тока синтезируется путем изменения частоты и амплитуды.Это даст два синусоидальных напряжения в противофазе.
Если напряжение, приложенное к основной обмотке, отстает от пусковой обмотки на 90 градусов, двигатель вращается в одном (т. Е. Вперед) направлении. Если мы хотим изменить направление вращения, тогда напряжение, приложенное к основной обмотке, должно проводить пусковую обмотку.
Надеюсь, вы получили представление о частотно-регулируемом приводе для асинхронного двигателя из этой статьи. Поэтому, если у вас есть какие-либо вопросы по этой концепции или электрическому и электронному проекту, оставьте, пожалуйста, раздел комментариев ниже.
Три способа управления однофазным асинхронным двигателем
Каждый день инженеры разрабатывают продукты, в которых используются однофазные асинхронные двигатели. Регулирование скорости однофазных асинхронных двигателей желательно в большинстве приложений управления двигателями, поскольку оно не только обеспечивает регулируемую скорость, но также снижает потребление энергии и звуковой шум.
Большинство однофазных асинхронных двигателей являются однонаправленными, что означает, что они предназначены для вращения в одном направлении.Либо путем добавления дополнительных обмоток, внешних реле и переключателей, либо путем добавления зубчатых передач, направление вращения можно изменить. Используя системы управления на основе микроконтроллеров, можно добавить в систему изменение скорости. В дополнение к опции изменения скорости, направление вращения также может быть изменено в зависимости от используемых алгоритмов управления двигателем.
Двигатели с постоянным разделенным конденсатором (PSC) – самый популярный тип однофазных асинхронных двигателей. В этой статье будут рассмотрены различные методы и топологии приводов для управления скоростью двигателя PSC в одном и двух направлениях.
Интерфейс микроконтроллера
Микроконтроллер – это мозг системы. Часто контроллеры, используемые для приложений управления двигателем, имеют специализированные периферийные устройства, такие как ШИМ для управления двигателем, высокоскоростные аналого-цифровые преобразователи (АЦП) и диагностические выводы. PIC18F2431 и dsPIC30F2010 от Microchip имеют эти встроенные функции.
Наличие доступа к специализированным периферийным устройствам микроконтроллера упрощает реализацию алгоритмов управления.
Каналы АЦП используются для измерения тока двигателя, температуры двигателя и температуры радиатора (подключены к выключателям питания). Третий канал АЦП используется для считывания уровней потенциометра, который затем используется для установки скорости двигателя. Дополнительные каналы АЦП могут использоваться в конечном приложении для считывания различных датчиков, таких как бесконтактный переключатель, датчики мутности, уровня воды, температуры морозильной камеры и т. Д.
Входы и выходы общего назначения (I / Os) могут использоваться для сопряжения переключает и отображает в приложении.Например, в холодильнике эти универсальные входы / выходы могут использоваться для управления ЖК-дисплеем, семисегментным светодиодным дисплеем, кнопочным интерфейсом и т. Д. Каналы связи, такие как I2C (TM) или SPI ( TM) используются для соединения платы управления двигателем с другой платой для обмена данными.
Интерфейсы неисправностей и диагностики включают в себя входные линии со специальными функциями, такими как возможность выключения ШИМ в случае катастрофических сбоев в системе. Например, в посудомоечной машине, если привод заблокирован из-за скопившихся отходов, это может помешать вращению двигателя.Эта блокировка может быть обнаружена в виде перегрузки по току в системе управления двигателем. Используя функции диагностики, эти типы неисправностей могут регистрироваться и / или отображаться, или передаваться на ПК для устранения неисправностей обслуживающего персонала. Часто это предотвращает серьезные отказы и сокращает время простоя продукта, что приводит к снижению затрат на обслуживание.
| Аппаратный интерфейс для PIC 18F2431 или dsPIC30F2010. |
ШИМ – это основные периферийные устройства, используемые для управления двигателем. Используя указанные выше входные данные, алгоритм управления двигателем микроконтроллера определяет рабочий цикл ШИМ и схему вывода. К наиболее ценным функциям ШИМ относятся дополнительные каналы с программируемым мертвым временем. ШИМ могут быть выровнены по краям или по центру. Выровненные по центру ШИМ имеют то преимущество, что они уменьшают электромагнитный шум (EMI), излучаемый изделием.
Вариант 1: однонаправленное управление
Управление VF в одном направлении делает топологию привода и алгоритм управления относительно простыми.Задача состоит в том, чтобы создать источник питания с переменным напряжением и частотой из источника питания с фиксированным напряжением и частотой (такого как источник питания от настенной розетки). На рисунке на странице 85 показана блок-схема этой топологии привода с тремя основными секциями построения, описанными ранее. Обмотки двигателя подключены к центру каждого полумоста на выходной секции инвертора. Многие двигатели, доступные в продаже, имеют как основную, так и пусковую обмотки, соединенные вместе с конденсатором, подключенным последовательно с пусковой обмоткой.В этой конфигурации двигатель может иметь только два выступающих провода (M1 и M2).
MCU, показанный на блок-схеме, имеет модуль PWM управления мощностью (PCPWM), который способен выводить до трех пар PWM с зоной нечувствительности между парами. Зона нечувствительности важна в приложении управления асинхронным двигателем, чтобы избежать перекрестной проводимости шины постоянного тока через переключатели питания, когда один выключается, а другой включается. Схема диагностики может включать в себя контроль тока двигателя, контроль напряжения на шине постоянного тока и контроль температуры на радиаторе, подключенном к выключателям питания и двигателю.
| Блок-схема топологии привода с тремя основными секциями здания. В этой конфигурации двигатель может иметь только два выступающих провода (M1 и M2). Показанный MCU имеет модуль ШИМ, который способен выводить до трех пар ШИМ с зоной нечувствительности между парами. |
| Двунаправленное управление с помощью H-моста. |
Двунаправленное управление
Большинство двигателей PSC предназначены для работы в одном направлении. Однако во многих приложениях требуется двунаправленное вращение двигателя. Исторически для достижения двунаправленного вращения использовались зубчатые передачи или внешние реле и переключатели. При использовании механических шестерен вал двигателя вращается в одном направлении, а шестерни прямого и обратного хода включаются и выключаются в соответствии с требуемым направлением. С помощью реле и переключателей полярность пусковой обмотки электрически меняется на обратную в зависимости от требуемого направления.
К сожалению, все эти компоненты увеличивают стоимость системы для базового управления включением и выключением в двух направлениях.
В этом разделе мы обсудим два метода двунаправленного управления скоростью для двигателей PSC с использованием привода на основе микроконтроллера. Обсуждаемые здесь топологии привода создают эффективные напряжения, которые приводят в действие главную обмотку и пусковую обмотку при сдвиге фаз на 90 градусов относительно друг друга. Это позволяет разработчику системы навсегда удалить конденсатор, включенный последовательно с пусковой обмоткой, из схемы, тем самым снижая общую стоимость системы.
Вариант № 2: H-мостовой преобразователь
Этот метод имеет удвоитель напряжения на входе; на выходе используется H-мост или двухфазный инвертор (см. рисунок выше). К каждому полумосту подключаются один конец основной и пусковой обмоток; другие концы соединены вместе в нейтральной точке источника переменного тока, которая также служит центральной точкой для удвоителя напряжения.
Для схемы управления требуется четыре ШИМ с двумя дополнительными парами и достаточной зоной нечувствительности между дополнительными выходами.PWM0-PWM1 и PWM2-PWM3 – это пары ШИМ с зоной нечувствительности. Используя ШИМ, шина постоянного тока синтезируется для обеспечения двух синусоидальных напряжений, сдвинутых по фазе на 90 градусов, с различной амплитудой и переменной частотой в соответствии с профилем VF. Если напряжение, приложенное к основной обмотке, отстает от пусковой обмотки на 90 градусов, двигатель вращается в прямом направлении. Чтобы изменить направление вращения, напряжение, подаваемое на главную обмотку, должно опережать напряжение, подаваемое на пусковую обмотку.
| Фазные напряжения при вращении двигателя в прямом и обратном направлении. |
Этот метод преобразователя H-моста для управления двигателем типа PSC имеет следующие недостатки.
Основная и пусковая обмотки имеют разные электрические характеристики. Таким образом, ток, протекающий через каждый переключатель, несбалансирован. Это может привести к преждевременному выходу из строя коммутационных аппаратов инвертора.
Общая точка обмоток напрямую подключена к нейтрали. Это может увеличить количество коммутационных сигналов, проникающих в основной источник питания, и может увеличить шум, излучаемый в линию.В свою очередь, это может ограничить уровень электромагнитных помех продукта, нарушая определенные цели и нормы проектирования.
Эффективное эффективное постоянное напряжение относительно высокое из-за удвоения входного напряжения.
Наконец, стоимость самой цепи удвоителя напряжения высока из-за двух мощных конденсаторов.
Лучшим решением для сведения к минимуму этих проблем было бы использование трехфазного инверторного моста, как обсуждается в следующем разделе.
Вариант № 3: Использование трехфазного инверторного моста
Входная секция заменена на стандартный диодно-мостовой выпрямитель.В выходной секции установлен трехфазный инверторный мост. Основное отличие от предыдущей схемы – способ подключения обмоток двигателя к инвертору. Один конец основной и пусковой обмоток подключены к одному полумосту каждый. Остальные концы связывают и соединяют с третьим полумостом.
| Управление с помощью трехфазного инверторного моста. |
При такой топологии привода управление становится более эффективным.Однако алгоритм управления усложняется. Напряжениями обмоток Va, Vb и Vc следует управлять для достижения разности фаз между эффективными напряжениями на основной и пусковой обмотках, чтобы сдвиг фаз между собой составлял 90 градусов.
Чтобы иметь равные уровни напряжения и нагрузки на всех устройствах, что улучшает использование устройства и обеспечивает максимально возможное выходное напряжение для заданного напряжения на шине постоянного тока, все три фазных напряжения инвертора поддерживаются на одной и той же амплитуде, как указано в :
| Va | = | Vb | = | Vc |
Эффективное напряжение на основной и пусковой обмотках, как указано по формуле:
Vmain = Va-Vc
Vstart = Vb-Vc
Направление вращения можно легко контролировать с помощью фазового угла Vc по отношению к Va и Vb .
На рисунках на стр. 87 показаны фазные напряжения Va, Vb и Vc, эффективные напряжения на основной обмотке (Vmain) и пусковой обмотке (Vstart) для прямого и обратного направлений соответственно.
Использование метода управления трехфазным инвертором на компрессоре мощностью 300 Вт дало экономию энергии на 30 процентов по сравнению с первыми двумя методами.
| Необходимые ресурсы микроконтроллера | ||||
|---|---|---|---|---|
| Ресурс | Однонаправленный | Двунаправленный H-мост | Двунаправленный с трехфазным мостом | Банкноты |
| Память программ | 1.5 Кбайт | 2,0 Кбайт | 2,5 Кбайт | – |
| Память данных | ~ 20 байт | ~ 25 байт | ~ 25 байт | – |
| ШИМ каналов | 2 канала | 2 канала | 3 канала | Дополняет мертвое время |
| Таймер | 1 | 1 | 1 | 8- или 16-битный |
| Аналого-цифровой преобразователь | 3-4 канала | 3-4 канала | 3-4 канала | Ток двигателя, измерения температуры, потенциометр регулировки скорости |
| Цифровые входы / выходы | от 3 до 4 | от 3 до 4 | от 3 до 4 | Для пользовательских интерфейсов, таких как переключатели и дисплеи |
| Входы неисправностей | 1 или 2 | 1 или 2 | 1 или 2 | Для перегрузки по току / перенапряжения / перегрева и т. Д. |
| Сложность алгоритма управления | Низкий | Средний | Высокая | – |
| Сравнение затрат | ||||
| Однонаправленный | Двунаправленный с H-мостом | Двунаправленный с трехфазным мостом | ||
| Секция преобразователя входа | Low – Однофазный диодный мостовой выпрямитель | High – из-за цепи удвоителя напряжения | Low – Однофазный диодный мостовой выпрямитель | |
| Выходная секция инвертора | Низкий – Два полумоста | Средний – Два полумоста.Силовые выключатели на более высокое напряжение | High – трехфазный инвертор. Использование интегрированных силовых модулей (IPM) лучше, чем дискретных компонентов | |
| Двигатель | Medium – требуется пусковой конденсатор | Low – Пусковой конденсатор снят с двигателя | Low – Пусковой конденсатор снят с двигателя | |
| Время разработки | Короткий | Средний | длинный | |
| Общая стоимость | Низкий | Средний | Medium – эффективное управление при заданной стоимости | |
Еще одно преимущество использования метода трехфазного управления состоит в том, что та же самая топология приводного оборудования может использоваться для управления трехфазным асинхронным двигателем.В этом сценарии микроконтроллер следует перепрограммировать для вывода синусоидальных напряжений с фазовым сдвигом на 120 градусов относительно друг друга, что приводит в действие трехфазный асинхронный двигатель. Это сокращает время разработки.
Однофазные асинхронные двигатели очень популярны в бытовой технике, а также в промышленных и бытовых приложениях. PSC – самый популярный тип однофазных асинхронных двигателей. Управление скоростью двигателя имеет много преимуществ, таких как энергоэффективность, снижение слышимого шума и лучший контроль над приложением.В этой статье мы обсудили различные методы управления скоростью, которые можно использовать с двигателем PSC в однонаправленном и двунаправленном режимах. Наилучшие результаты дает управление двигателем PSC с использованием топологии трехфазного инвертора.
| |
Фазное напряжение при вращении двигателя в прямом и обратном направлениях.Больше новостей |