
инструкция, примеры использования и документация [Амперка / Вики]
Используйте сервопривод Feetech FT6335M для моделирования движения различных механизмов. Привод может открывать/закрывать заслонки для создания кормушки домашнему питомцу или для проектирования тайника в квеструме. А ещё сервомотор даст возможность вашему роботу управлять руками или вращать головой.
Цифровой сервопривод Feetech FT6335M управляется по сигналу PDM (Pulse Duration Modulation), способен удерживать угол от 0 до 360° и обладает крутящим моментом до 35,5 кг·см. А на закуску привод похвастается выходным сигналом с датчика обратной связи для точного измерения текущего угла.
Примеры работы
Подробности про PDM сервоприводы с удержанием угла и примеры работы для Arduino, Espruino и Raspberry Pi читайте в нашей инструкции по использованию сервоприводов PDM.
Для настройки примеров конкретно под сервопривод Feetech FT6335M используйте данные :
Минимальная ширина импульса CW: 500 мкс
Максимальная ширина импульса CCW: 2500 мкс
Минимальный угол поворота вала CW: 0°
Максимальный угол поворота вала CCW: 360°
Элементы сервопривода
Чтобы узреть устройство сервопривода, приведём схематическое расположение его элементов.
Электромотор с редуктором
За преобразование электричества в механический поворот отвечает коллекторный мотор. Для практического использования скорость вращения мотора слишком большая, а крутящий момент — наоборот слишком слабый. Для решения двух проблем выходной вал мотора соединён с группой нейлоновых шестеренок, которые пропорционально позволяют увеличить крутящий момент, но при этом снизить скорость вращения выходного вала. Всё аналогично коробке передач в автомобиле.
Выходной вал
Цифровой сервопривод Feetech FT6335M способен устанавливать и удерживать угол выходного вала от 0 до 360° с направлением движения по часовой стрелке.
Выходной вал — это часть редуктора, которая выведена за пределы корпуса сервопривода и непосредственно приводится в движение при подаче управляющих сигналов на мотор. К выходному валу крепится необходимая нагрузка: например качалка, вращающийся вал, тянущие или толкающие механизмы. Вал выполнен в формате 25T/5.9, где 25T — количество зубьев, а 5.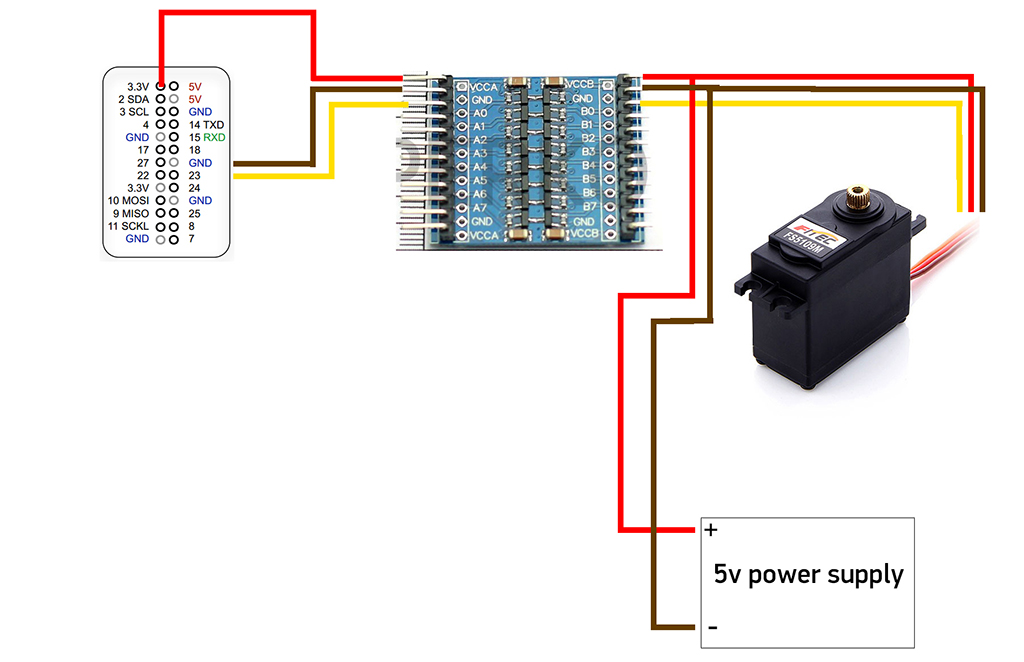
В комплектации серво идут качельки разных форм-факторов, которые надеваются на вал сервопривода для дальнейшего соединения с механизмами ваших устройств.
Не прилагайте к валу сервопривода нагрузки, которые больше крутящего момента. Это может привести к разрушению редуктора.
Плата управления
Для обработки входного сигнала с внешнего контроллера в сервоприводе расположена цифровая схема управления, которая принимает импульсы, сравнивает их с показателем датчика обратной связи и по результату управляет мотором.
Датчик обратной связи
Для контроля положения вала на сервоприводе установлен магнитный энкодер, который играет роль датчика обратной связи. Сенсор преобразует угол поворота вала в электрический сигнал, который поступает на плату управления в сервоприводе.
Выходной шлейф
| Цвет провода | Контакт | Функция | Подключение |
|---|---|---|---|
| Оранжевый | S | Пин управления сервоприводом | Подключите к пину ввода-вывода микроконтроллера. |
| Красный | V | Питание | Подключите к питанию от 4 до 8,4 вольт. |
| Коричневый | G | Земля | Подключите к земле. |
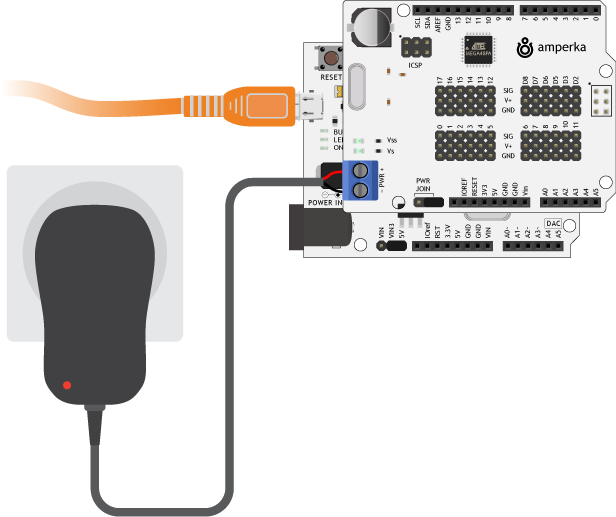
Напряжение к сервоприводу можно подключать двумя способами: без внешнего источника питания и с внешним источником питания. Подробности читайте в нашей инструкции по использованию сервоприводов PDM с удержанием угла.
Габаритный чертёж
Характеристики
Модель: Feetech FT6335M
Сигнал управления: PDM (Pulse Duration Modulation)
Напряжение питания: 4–8,4 В
Потребляемый ток без нагрузки:
150 мА при 6 В
180 мА при 7,4 В
Номинальный потребляемый ток:
1000 мА при 6 В
1200 мА при 7,4 В
Пиковый потребляемый ток:
3200 мА при 6 В
3900 мА при 7,4 В
Скорость вращения:
60° за 0,238 сек (42 RPM) при 6 В
60° за 0,192 сек / (52 RPM) при 7,4 В
Номинальный крутящий момент:
9,5 кг·см при 6 В
11,8 кг·см при 7,4 В
Пиковый крутящий момент:
28,8 кг·см при 6 В
35,5 кг·см при 7,4 В
Внутренний интерфейс: цифровой с обратной связью
Диапазон поворота вала: удержание угла 0–360°
Выходной вал: 25T / 5,9 мм
Материал шестерней: сталь
Материал корпуса: пластик
Размеры: 55×20×47,4 мм
Вес: 65 г
Ресурсы
Сервопривод Feetech FT6335M в магазине.
Векторное изображение сервопривода
Полезные статьи
Сервоприводы: общее руководство
Сервоприводы PDM с удержанием угла: подробности по использованию
Библиотеки
Документация
Datasheet на Feetech FT6335M
инструкция, примеры использования и документация [Амперка / Вики]
Используйте сервопривод Feetech FT90B для моделирования движения различных механизмов. Привод с лёгкостью сможет открывать/закрывать заслонки для создания кормушки домашнему питомцу или для проектирования маленького тайника в квеструме. А ещё сервомотор даст возможность вашему роботу управлять руками или вращать головой.
Цифровой сервопривод Feetech FT90B управляется по сигналу PDM (Pulse Duration Modulation), способен удерживать угол от 0 до 180° и обладает крутящим моментом до 1,5 кг·см.
Примеры работы
Подробности про PDM сервоприводы с удержанием угла и примеры работы для Arduino, Espruino и Raspberry Pi читайте в нашей инструкции по использованию сервоприводов PDM.
Для настройки примеров конкретно под сервопривод Feetech FT90B используйте данные :
Минимальная ширина импульса: 500 мкс
Максимальная ширина импульса: 2500 мкс
Минимальный угол поворота вала: 0°
Максимальный угол поворота вала: 180°
Элементы сервопривода
Для того что бы узреть устройство сервопривода, приведем схематическое расположение его элементов.
Электромотор с редуктором
За преобразование электричества в механический поворот отвечает коллекторный мотор. Для практического использования скорость вращения мотора слишком большая, а крутящий момент — наоборот слишком слабый. Для решения двух проблем выходной вал мотора соединён с группой нейлоновых шестеренок, которые пропорционально позволяют увеличить крутящий момент, но при этом снизить скорость вращения выходного вала. Всё аналогично коробке передач в автомобиле.
Выходной вал
Цифровой сервопривод Feetech FT90B способен устанавливать и удерживать угол выходного вала от 0 до 180°.
Выходной вал — это часть редуктора, которая выведена за пределы корпуса сервопривода и непосредственно приводится в движение при подаче управляющих сигналов на мотор. К выходному валу крепится необходимая нагрузка: например качалка, вращающийся вал, тянущие или толкающие механизмы. Вал выполнен в формате 21T/4.86, где 21T — количество зубьев, а 4,86 — внешний диаметр в мм.
В комплектации серво идут качельки разных форм-факторов, которые надеваются на вал сервопривода для дальнейшего соединения с механизмами ваших устройств.
Не прилагайте к валу сервопривода нагрузки, которые больше крутящего момента. Это может привести к разрушению редуктора.
Плата управления
Для обработки входного сигнала с внешней управляющей платы в сервоприводе расположена цифровая схема с микроконтроллером, который принимает импульсы и по результату управляет мотором.
Датчик обратной связи
Для контроля положения вала на сервоприводе установлен потенциометр, который играет роль датчика обратной связи.
Выходной шлейф
| Цвет провода | Контакт | Функция | Подключение |
|---|---|---|---|
| Оранжевый | S | Пин управления сервоприводом | Подключите к пину ввода-вывода микроконтроллера. |
| Красный | V | Питание | Подключите к питанию от 4,8 до 6 вольт. |
| Коричневый | G | Земля | Подключите к земле. |
Напряжение к сервоприводу можно подключать двумя способами: без внешнего источника питания и с внешним источником питания. Подробности читайте в нашей инструкции по использованию сервоприводов PDM с удержанием угла.
Габаритный чертёж
Характеристики
Модель: FT90B 6V 1.5kg.cm Digital Servo
Сигнал управления: PDM (Pulse Duration Modulation)
Напряжение питания: 3–6 В
Потребляемый ток:
при 3 В: до 100 мА
при 4,8 В: до 120 мА
при 6 В: до 150 мА
Пиковый потребляемый ток:
при 3 В: до 450 мА
при 4,8 В: до 700 мА
при 6 В: до 800 мА
Скорость вращения:
при 3 В: 60° за 0,16 сек (180° за 0,48 сек)
при 4,8 В: 60° за 0,12 сек (180° за 0,36 сек)
при 6 В: 60° за 0,09 сек (180° за 0,27 сек)
Крутящий момент:
при 3 В: 1 кг·см
при 4,8 В: 1,3 кг·см
при 6 В 1,5 кг·см
Внутренний интерфейс: цифровой
Диапазон поворота вала: удержание угла 0–180°
Выходной вал: 21T / 4,86 мм
Материал шестерней: нейлон
Материал корпуса: пластик
Размеры: 32,3×12,1×29,7 мм
Вес: 10,5 г
Ресурсы
Сервопривод Feetech FT90B в магазине.

Векторное изображение сервопривода
Полезные статьи
Сервоприводы: общее руководство
Сервоприводы PDM с удержанием угла: подробности по использованию
Библиотеки
Документация
Datasheet на Feetech FT90B
Product Specification на Feetech FT90B
Электрические характеристики сервоприводов и введение в интерфейс управления сервоприводами
До сих пор я говорил о сервоприводах в основном с точки зрения их типичного использования. Хотя я надеюсь, что предоставил достойную основу для их предполагаемого использования и некоторое представление о том, что находится внутри сервопривода, это то, что вы можете узнать в магазинах товаров для хобби и разобрав несколько сервоприводов. Сегодня я хочу перейти к обсуждению электрических характеристик сервоприводов с интерфейсом управления в качестве основной темы.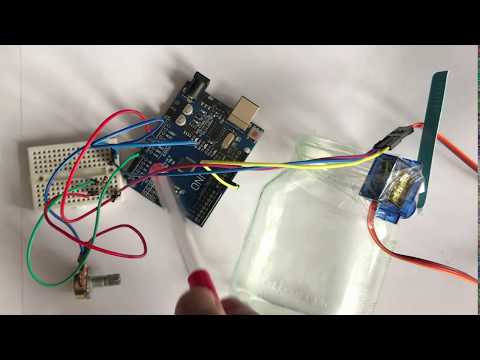 С точки зрения производителей сервоприводов управляющий сигнал может быть внутренней деталью, поэтому его обсуждение означает, что мы переходим к области, которая менее официально задокументирована. Я постараюсь изложить все в общих чертах и немного подкрепить свои утверждения там, где это практически возможно, но некоторые детали могут относиться не ко всем сервоприводам.
С точки зрения производителей сервоприводов управляющий сигнал может быть внутренней деталью, поэтому его обсуждение означает, что мы переходим к области, которая менее официально задокументирована. Я постараюсь изложить все в общих чертах и немного подкрепить свои утверждения там, где это практически возможно, но некоторые детали могут относиться не ко всем сервоприводам.
Электрическое соединение
Во-первых, обзор электрических соединений, о которых я упоминал в посте о сервоприводах. Если вы только что прочитали это, вы можете перейти к разделу «мощность».
Сервоприводы имеют трехпроводные кабели, которые подают питание и команды на сервоприводы. Кабели обычно имеют длину от шести до двенадцати дюймов с проводами калибра 22 и тоньше (маленькие сервоприводы, как правило, имеют более короткие и тонкие провода). Поскольку разъемы стали более стандартизированными, порядок проводов также стал стандартизированным: провод питания посередине, по бокам провода заземления и сигнальные провода.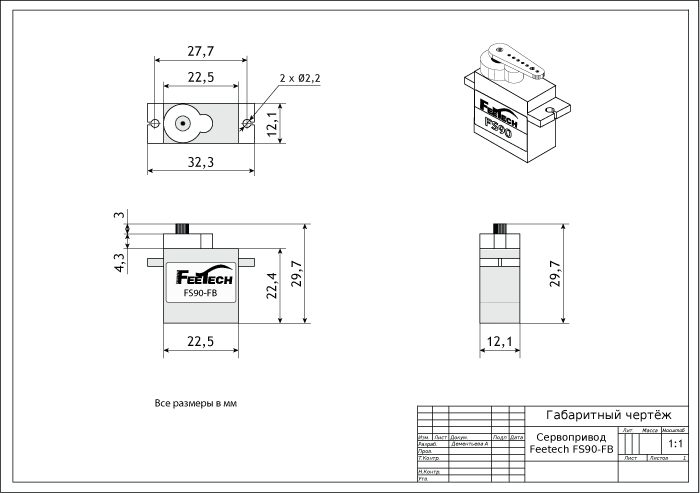 Однако цветовые схемы по-прежнему различаются. Общие из них:
Однако цветовые схемы по-прежнему различаются. Общие из них:
- Черный для заземления, красный для питания, белый для сигнала
- Коричневый для заземления, красный для питания и оранжевый для сигнала
- Черный для заземления, красный для питания, синий для сигнала
Я предпочитаю первую схему, так как она обеспечивает наибольшую контрастность; оранжевый и коричневый второй схемы могут выглядеть примерно одинаково при плохом освещении, как и синий и черный третьего подхода. Вы почти гарантированно мгновенно уничтожите сервопривод, если подключите питание в обратном направлении, поэтому убедитесь, что вы перепроверили свои соединения.
Трехжильный кабель заканчивается 3-контактным разъемом, который почти всегда является гнездовым разъемом с шагом 0,1 дюйма. К сожалению, большая часть мира радиоуправления называет этот гнездовой разъем штекерным разъемом. Как и в случае с цветами кабеля, цвета разъемов могут различаться.Вилка «Futaba», слева на картинке ниже, имеет дополнительный поляризующий язычок (слева на картинке), который можно отрезать, чтобы он подходил к другим, которые называются «JR» ( в центре) и “Airtronics Z” (справа).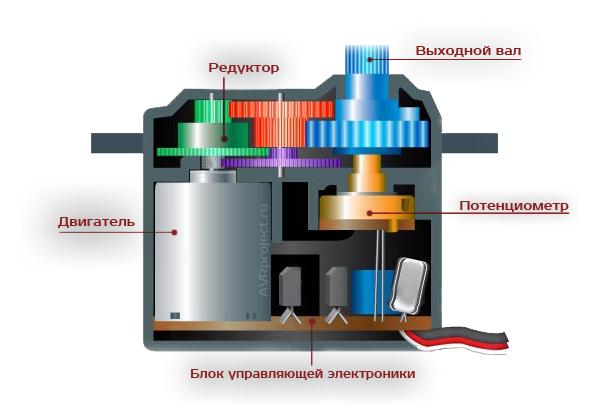 Некоторые торговые марки могут различаться в зависимости от страны; наиболее распространенные названия, которые я встречаю у производителей универсальных сервоприводов в Китае, – это “Futaba” и “JR” 9.0009
Некоторые торговые марки могут различаться в зависимости от страны; наиболее распространенные названия, которые я встречаю у производителей универсальных сервоприводов в Китае, – это “Futaba” и “JR” 9.0009
Общие разъемы для сервоприводов RC. Слева направо: Futaba, JR, Airtronics Z. |
|---|
Если смотреть с конца, разъемы имеют два скошенных угла, чтобы предотвратить подключение сервоприводов задом наперед. Этот механизм предотвращения основан на том, что радиоуправляемый приемник имеет соответствующий вырез, которого нет в большинстве сервоконтроллеров и другой электроники, которую строитель роботов может использовать вместо обычных компонентов радиоуправления. Еще раз: будьте внимательны при подключении сервоприводов!
Питание
Перезаряжаемый NiMH аккумулятор: 6,0 В, 2200 мАч, 3+2 элемента AA. |
|---|
Как я упоминал во введении к сервоприводам, сервоприводы обычно используются в устройствах с батарейным питанием. Батареи исторически представляли собой никель-кадмиевые батареи с четырьмя или пятью элементами или четырехэлементные щелочные батареи, которые обеспечивают номинальное напряжение 4,8–6,0 В. Более новые батареи NiMH имеют такое же напряжение, и поэтому сервоприводы, как правило, предназначены для работы при этих напряжениях, но без указания точного рабочего диапазона. Хорошо заряженный 5-элементный блок может достигать примерно 7,0 В, а 4-элементный блок может упасть примерно до 4,0 В, не считаясь чрезмерно разряженным, так что это диапазон, в котором мы можем разумно ожидать, что большинство сервоприводов будут работать.
Батареи исторически представляли собой никель-кадмиевые батареи с четырьмя или пятью элементами или четырехэлементные щелочные батареи, которые обеспечивают номинальное напряжение 4,8–6,0 В. Более новые батареи NiMH имеют такое же напряжение, и поэтому сервоприводы, как правило, предназначены для работы при этих напряжениях, но без указания точного рабочего диапазона. Хорошо заряженный 5-элементный блок может достигать примерно 7,0 В, а 4-элементный блок может упасть примерно до 4,0 В, не считаясь чрезмерно разряженным, так что это диапазон, в котором мы можем разумно ожидать, что большинство сервоприводов будут работать.
Переход к более высокому напряжению может вывести из строя сервоприводы, поэтому проверка верхней границы может быть рискованной. С другой стороны, более низкие напряжения соответствуют разряженным батареям, которые, как мы надеемся, не приведут к повреждению сервоприводов, поэтому вы можете безопасно протестировать нижний предел рабочего диапазона с регулируемым источником питания.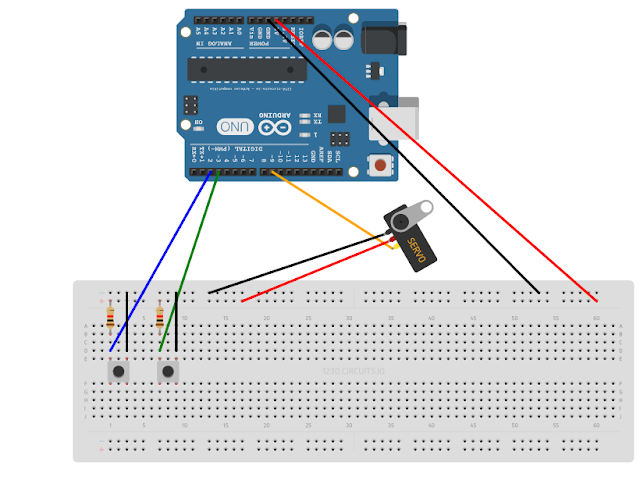 Если вы проводите тесты для нижнего предела, имейте в виду, что отдельные блоки могут различаться и что предел может быть функцией таких переменных, как температура.
Если вы проводите тесты для нижнего предела, имейте в виду, что отдельные блоки могут различаться и что предел может быть функцией таких переменных, как температура.
Меньшие никель-металлогидридные аккумуляторные батареи 1/3 и 2/3 AAA отлично подходят для миниатюрных роботов. |
|---|
Некоторые сервоприводы, особенно микросервоприводы, рассчитаны только на работу с напряжением 4,8 В, что подразумевает работу с 4 элементами при максимальном напряжении 6,0 В. из одной ячейки (номинальное значение 3,7 В) и из двух последовательно соединенных ячеек (номинальное значение 7,4 В). Одноэлементные блоки снова находятся на микроуровне и могут иметь верхний предел около 4,5 В; устройства с двумя ячейками могут продаваться как высоковольтные сервоприводы, поскольку верхний предел напряжения составляет 9V или выше. Батарея на основе никеля с тремя ячейками обычно может заменить литиевую батарею с одной ячейкой, а батарея из никеля с шестью ячейками может заменить литиевую батарею с двумя ячейками.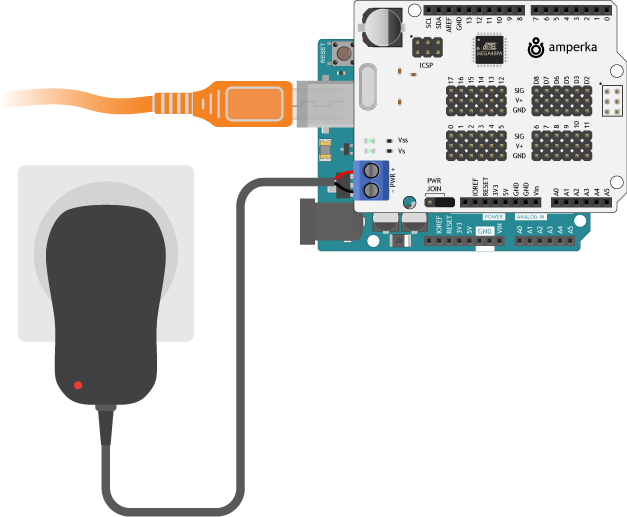
Ток, требуемый сервоприводами, также обычно не указывается. Когда мы проектируем сервоприводы, как и большинство компонентов, нас интересуют два основных тока: ток покоя или холостого хода, когда сервопривод ничего не делает, и максимальный ток, который в случае сервопривода является током остановки. . Ток покоя даст нам верхнюю границу того, как долго может работать приложение с батарейным питанием; ток остановки говорит нам о минимальном токе, который должен выдавать наш блок питания. Средний ток, потребляемый сервоприводом в реальной работе, будет где-то между двумя крайними значениями и будет зависеть от того, насколько активен сервопривод в приложении.
Ток, потребляемый сервоприводом, будет приблизительно линейно зависеть от напряжения питания, поэтому токи, потребляемые при напряжении 7 В, будут почти в два раза выше, чем при 4 В. Измерить ток покоя относительно легко, так как он мал, постоянен и течет сценарий низкой нагрузки. Токи останова измерить труднее, потому что на самом деле остановка сервопривода не очень желательна, поэтому мы не хотим делать это в течение длительного периода времени. Если вам нужно знать ток останова, безопаснее всего измерить его в нижней части рабочего диапазона, а затем экстраполировать для более высоких напряжений питания.
Если вам нужно знать ток останова, безопаснее всего измерить его в нижней части рабочего диапазона, а затем экстраполировать для более высоких напряжений питания.
Поскольку токи сервоприводов обычно не указываются, и мы, возможно, не захотим заморачиваться измерением каждого используемого нами сервопривода, хорошо иметь в виду несколько оценок. Стандартный сервопривод будет иметь ток останова около одного ампера, микро-сервоприводу потребуется несколько сотен миллиампер, а гигантский сервопривод может потреблять десять ампер и более. Поскольку сервоприводы работают в основном при одном и том же напряжении, единственные способы, которыми сервоприводы могут обеспечить больший крутящий момент, – это иметь более высокие передаточные числа или использовать больший ток. Если два сервопривода имеют одинаковую скорость при одном и том же напряжении, но один из них имеет пятикратный пусковой момент, он, вероятно, будет потреблять в пять раз больший ток останова.
Токи покоя оценить сложнее, потому что они не зависят от двигателя, как токи останова. Эти токи холостого хода могут существенно различаться, поскольку они зависят от электроники сервопривода, но обычно ток должен находиться в диапазоне от нескольких десятков до одной или двухсот миллиампер. Ток покоя также может быть осложнен существованием двух возможных значений: одно для случая, когда сервопривод пытается сохранить положение, но уже находится там и, следовательно, не нуждается в питании двигателя, и другое для случая, когда сервопривод «выключен» и вообще не пытается удерживать позицию. (Мы вернемся к тому, что значит «выключить» сервопривод позже.)
Эти токи холостого хода могут существенно различаться, поскольку они зависят от электроники сервопривода, но обычно ток должен находиться в диапазоне от нескольких десятков до одной или двухсот миллиампер. Ток покоя также может быть осложнен существованием двух возможных значений: одно для случая, когда сервопривод пытается сохранить положение, но уже находится там и, следовательно, не нуждается в питании двигателя, и другое для случая, когда сервопривод «выключен» и вообще не пытается удерживать позицию. (Мы вернемся к тому, что значит «выключить» сервопривод позже.)
Интерфейс управления сервоприводом
Сервоприводы управляются импульсами на сигнальной линии, которые относятся к линии заземления, которая является обратным путем как для питания сервоприводов, так и для управляющего сигнала. Частота импульсов обычно составляет 50 Гц, но точная частота не имеет значения. Ширина импульса соответствует положению сервопривода, а 1,5 мс соответствует «нейтральной» точке сервопривода.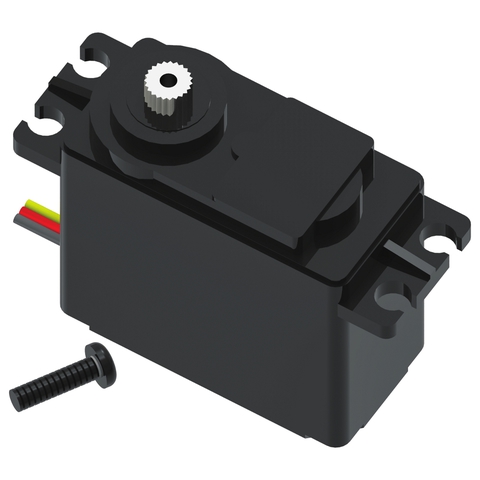 Эта нейтральная точка не обязательно является средней точкой максимального доступного диапазона сервопривода. Укорочение импульса заставляет сервопривод двигаться в одну сторону; увеличение импульса заставляет сервопривод двигаться в другом направлении. Нормальный диапазон ширины импульса составляет от 1,0 мс до 2,0 мс, что соответствует приблизительному механическому диапазону 90 градусов (для большинства сервоприводов).
Эта нейтральная точка не обязательно является средней точкой максимального доступного диапазона сервопривода. Укорочение импульса заставляет сервопривод двигаться в одну сторону; увеличение импульса заставляет сервопривод двигаться в другом направлении. Нормальный диапазон ширины импульса составляет от 1,0 мс до 2,0 мс, что соответствует приблизительному механическому диапазону 90 градусов (для большинства сервоприводов).
Поскольку интерфейс сервопривода не так подробно задокументирован, давайте посмотрим на сигналы от типичного радиоуправляемого приемника на осциллографе. Мы начнем с рассмотрения этого бюджетного 2-канального AM-приемника:
2-канального RC-приемника. |
|---|
На следующем снимке экрана показаны сигналы для двух каналов за период 100 мс. Я запитал приемник от 5-элементной батареи, которая должна была быть где-то около 6 В, но мы видим, что выходные импульсы регулируются примерно до четырех вольт:
Снимок экрана осциллографа через 100 мс двух каналов от радиоуправляемого приемника 75 МГц. |
|---|

На этой горизонтальной временной шкале мы видим, что частота импульсов на самом деле чуть выше 50 Гц. Мы также видим, что импульс длительностью 1,5 мс соответствует рабочему циклу менее 10 %, поэтому нам нужно увеличить масштаб времени, чтобы лучше увидеть фактические импульсы:
На левом рисунке оба канала имеют время около 1,5 мс, так как управляющие входы на передатчике RC были в нейтральном положении. На правом снимке я переместил управляющие входы в крайнее положение, в результате чего ширина импульса первого канала сократилась почти до 2 мс, а ширина импульса второго канала сократилась примерно до 1 мс.
Далее, давайте посмотрим на выходы этого высококачественного шестиканального приемника:
6-канальный радиоуправляемый приемник. |
|---|
Начнем снова с той же горизонтальной шкалы 100 мс, которая показывает, что частота импульсов от этого приемника немного выше, чем от предыдущего приемника: захват четырех каналов с радиоуправляемого приемника 2,4 ГГц.
Это трудно заметить, так как мне пришлось изменить масштаб по вертикали, чтобы уместить четыре канала, но амплитуда импульсов теперь составляет всего 3 В. Если мы увеличим масштаб во времени, мы также можем четко увидеть, что импульсы отправляются один за другим:
Снимок экрана осциллографа за 10 мс четырех каналов радиоуправляемого приемника 2,4 ГГц. |
|---|
Относительная синхронизация импульсов на различных каналах не имеет значения для отдельных сервоприводов, поскольку каждый сервопривод получает только один сигнал, но это дает нам пищу для размышлений, если мы хотим генерировать импульсы для управления несколькими сервоприводами: если мы хотим отправить более десяти импульсов, которые могут иметь длину до 2 мс за 20 мс или меньше, нам придется отслеживать несколько одновременных импульсов. Я посмотрел на другой радиоуправляемый приемник (8-канальный Airtronics 92824), надеясь, что у него будут перекрывающиеся импульсы, но выходы выглядели так же, как и у приемника Futaba (включая импульсное напряжение 3,0 В).
Заключение (на данный момент)
К этому моменту у вас должно быть некоторое представление о мощности и сигнале, которые необходимо подать на сервопривод, чтобы заставить его двигаться. В следующий раз мы более подробно рассмотрим сервоприводы и их командный интерфейс, чтобы увидеть, что происходит, когда мы пытаемся добиться от них большей производительности.
Сервопривод или сервоусилитель? и другие вопросы по управлению движением
В чем разница между сервоприводом и сервоусилителем? Многие термины управления движением используются взаимозаменяемо, ситуативно, а иногда и неправильно. Мы будем первыми, кто признает, что временами это может немного сбивать с толку, и это понятно. Некоторые термины управления движением со временем изменились, и не во всех регионах. Лингвистические предпочтения также могут меняться в зависимости от отрасли приложения.
Этот блог должен прояснить некоторые неясности, связанные с терминологией управления движением приводов, контроллеров, двигателей и т. д. Опять же, некоторые термины могут означать разные вещи для разных людей, но это должно служить общим руководством к тому, что к чему.
д. Опять же, некоторые термины могут означать разные вещи для разных людей, но это должно служить общим руководством к тому, что к чему.
Сервопривод или сервоусилитель?
Пожалуй, наиболее заметными из этих неоднозначных терминов являются сервоприводы и сервоусилители. По правде говоря, это как газировка, кола и шипучка; в большинстве случаев они означают одно и то же. Сервоусилитель, привод и даже драйвер могут использоваться более или менее взаимозаменяемо, по крайней мере, в Соединенных Штатах.
Давайте заглянем в историю управления движением. Термин сервоусилитель появился раньше, чем термин сервопривод. Это было еще в середине 1900-х, когда все они были аналоговыми. Сервоусилители лишь усиливали электрические командные сигналы и использовали обратную связь для управления крутящим моментом и скоростью однофазных двигателей. Только позже такие функции, как переключение режимов, несколько вариантов обратной связи, изоляция и другие функции, стали доступны сегодня на аналоговых платформах. Когда в конце 1900-х годов появились цифровые сервоусилители, стало возможным еще больше функций, таких как управление положением, сетевая связь, цифровой ввод/вывод и предварительно запрограммированные движения. Имея больше возможностей, некоторые вместо этого стали называть сервоусилители сервоприводами.
Когда в конце 1900-х годов появились цифровые сервоусилители, стало возможным еще больше функций, таких как управление положением, сетевая связь, цифровой ввод/вывод и предварительно запрограммированные движения. Имея больше возможностей, некоторые вместо этого стали называть сервоусилители сервоприводами.
Таким образом, хотя сервопривод или сервопривод иногда подразумевает более сложное устройство, чем простой сервоусилитель, они представляют собой одну и ту же технологию и могут использоваться в США полностью взаимозаменяемо. Однако в некоторых частях Европы люди в некоторых отраслях промышленности будут говорить о приводе или драйвере в отношении самого двигателя, а не усилителя. В этом случае во избежание путаницы предпочтительнее использовать сервоусилитель (или даже контроллер). Однако в большинстве случаев вы можете назвать это сервоприводом, сервоусилителем или сервоприводом, и никто вас не огорчит.
Сервоприводы предназначены только для серводвигателей?
Как упоминалось ранее, возможности усилителей расширились за пределы основ управления серводвигателями и охватили другие области, особенно после появления цифровых приводов. Со временем инженеры пришли к выводу, что с помощью одной и той же технологии они могут управлять шаговыми, асинхронными и линейными двигателями. Возникает вопрос, следует ли приводы называться сервоприводами только в том случае, если они предназначены исключительно для однофазных и трехфазных серводвигателей? Мы говорим «нет» по двум основным причинам.
Со временем инженеры пришли к выводу, что с помощью одной и той же технологии они могут управлять шаговыми, асинхронными и линейными двигателями. Возникает вопрос, следует ли приводы называться сервоприводами только в том случае, если они предназначены исключительно для однофазных и трехфазных серводвигателей? Мы говорим «нет» по двум основным причинам.
Во-первых, все технологии развились из сервоуправления, и иногда названия просто прилипают. В электронных письмах строка «Копия» означает «Копировальная копия», что происходит от старого метода создания нескольких копий письменных или машинописных документов с использованием копировальной бумаги. Хотя копировальная бумага, очевидно, не используется для электронных писем, этот термин все еще используется, потому что именно на нем он основан. Все началось с сервоприводов, поэтому мы продолжаем это.
Во-вторых, многие приводы, используемые для управления шаговыми, асинхронными и линейными двигателями, также могут управлять сервоприводами. Просто потому, что кофейная кружка используется как подставка для карандашей, она остается кофейной кружкой. Наши смартфоны сегодня делают гораздо больше, чем просто звонят по телефону. Сервоприводы не просто ограничены своим первоначальным назначением.
Просто потому, что кофейная кружка используется как подставка для карандашей, она остается кофейной кружкой. Наши смартфоны сегодня делают гораздо больше, чем просто звонят по телефону. Сервоприводы не просто ограничены своим первоначальным назначением.
Тем не менее, всегда будут исключения (и сторонники, которые строго следят за их соблюдением). Некоторая электроника специально разработана для другого типа двигателя, такого как шаговые приводы (или шаговые усилители, шаговые драйверы и т. д.), поэтому технически сервопривод в этом случае будет неправильным, но все же приемлемым для большинства. Другие могут возразить, что неправильно называть привод сервоприводом, если он работает с несерводвигателем. По этой причине такие термины, как моторный привод, моторный усилитель и моторный драйвер, могут использоваться как универсальный термин.
ADVANCED Motion Controls Цифровые сервоприводы из наших семейств приводов FlexPro™ и DigiFlex® Performance™ можно легко настроить для управления линейными двигателями, асинхронными двигателями переменного тока, двух- и трехфазными шаговыми двигателями, звуковыми катушками и многим другим! Мы называем их сервоприводами, и мы придерживаемся этого.
Являются ли сервоприводы контроллерами двигателей?
Это хитрый вопрос. Да, сервоприводы обеспечивают элемент управления двигателем. Без моторного привода вы бы потеряли управление. Но с точки зрения управления двигателем по желанию, являются ли они контроллерами? Иногда, но не всегда.
Давайте еще раз вернемся назад во времена первых сервоусилителей. Двигатели действительно работали от энергии, которую они получали от усилителя. И усилитель действительно обеспечивал тройную координацию фаз для бесколлекторных двигателей, что было критически важно для правильной работы двигателя. Однако в первую очередь усилители делали одно: усиливали. Они получали командный сигнал от внешнего источника, такого как циферблат, ползунковый переключатель или компьютер, и на его основе приводили в действие двигатель. Если вы хотели изменить крутящий момент, скорость или положение двигателя, вам нужно было изменить управляющий сигнал. Контроллер — это то, что доставило этот командный сигнал.
Теперь, когда сервоприводы стали более совершенными, грань между приводом и контроллером может быть немного размытой. В некоторые аналоговые приводы встроены потенциометры, поэтому, если бы кто-то управлял двигателем, вручную регулируя потенциометры усиления или смещения (как мы иногда делаем при проведении испытаний в AMC), то привод технически действовал бы как контроллер. Тем не менее, эти процессы обычно выполняются во время процесса настройки, а не используются в качестве управляющего входа для фактического приложения.
Встроенная вычислительная мощность цифровых сервоприводов делает их еще более способными действовать как контроллеры. Цифровые приводы можно запрограммировать таким образом, чтобы они запускали выполнение стандартных команд движения сразу же после их включения. Благодаря логическим входам и выходам сервоприводы могут управлять собой и другими приводами в автономном режиме. Они даже могут управлять другими частями машины, в которой они установлены.
