
Схемы регуляторов мощности для паяльника и других нагревательных приборов
Довольно часто в процессе пайки схем, после замены элемента нужно протестировать работу схемы, провести некоторые измерения. Паяльник при этом остается включенным, и, если тестирование схемы затянется, жало начинает обгорать. Чтобы избежать этого приходится отключать паяльник, а когда он вновь понадобится ждать его разогрева. Но можно собрать регулятор мощности. Когда паяльник не нужен просто уменьшаем мощность чтобы жало не обгорало, а когда нужен увеличиваем мощность и разогрев происходит быстрее.
Первая схема на тиристоре:
Здесь тиристор замыкает диодный мост. После подачи питания через резисторы R1, R2 начинает заряжаться конденсатор C1. Когда напряжение на нем станет достаточным для отпирания тиристора, он откроется, замкнет диодный мост и включит нагрузку. Затем начнется разряд конденсатора через резисторы R3, R4. Ток выпрямленный диодным мостом имеет пульсирующую форму(меняется от нуля до максимума).
Следующая схема на симисторе и динисторе:
Здесь не нужен диодный мост, т.к. симистор пропускает ток в обоих направлениях. Принцип действия такой же как и у предыдущей схемы, только теперь для открытия симистора напряжение на конденсаторе должно достигнуть напряжения пробоя динистора. Светодиод D2 служит для индикации работы, а D3 защищает светодиод от пробоя обратным напряжением. Эти диоды ставить не обязательно.
Это простые схемы, но они создают помехи во время работы. Чтобы их уменьшить нужно включать и выключать нагрузку в те моменты, когда сетевое напряжение близко к нулю. Нужен детектор перехода напряжения через ноль. Существует много вариантов реализации такого детектора, но я решил воспользоваться готовым решением – симисторной оптопарой со встроенным детектором нуля MOC3063.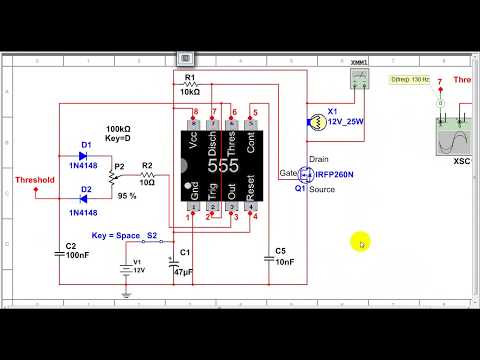
На таймере NE555 собран генератор с изменяемой скважностью. Период колебаний зависит от величины переменного резистора R2 и емкости конденсатора C3. Переменный резистор нужен линейный, чтобы среднее положение движка соответствовало коэффициенту заполнения 50%. У меня не нашлось переменного резистора на 100кОм и я поставил на 15кОм, емкость конденсатора при этом увеличил до 1000µF.
Схема включения оптосимистора стандартная, из даташита. Снабберную цепь R7, C4 можно не ставить. Она нужна только если нагрузка имеет индуктивный характер(электродвигатель). Не перепутайте местами выводы симистора, иначе он не будет работать. Первый вывод к нижнему по схеме проводу, второй к верхнему, третий управляющий.
Период колебаний шим можно выбрать в несколько секунд. Для мощных нагревателей можно и побольше. Увеличивая период шим сигнала с одной стороны сокращаем количество переключений и соответственно помех, но с другой стороны увеличивается разброс температур, что может несколько сократить срок службы нагревателя. Период в несколько минут может подойти например для управления компрессором в аквариуме или вентиляцией помещения.
Для питания управляющей части хотел использовать бестрансформаторный блок питания, который собирал ранее. Но с ним на максимальной мощности регулятора не хватало тока для открытия оптосимистора, большая его часть уходила на зарядку конденсатора.
В итоге поставил на питание зарядку от телефона на 5В коих у меня много. Боялся что питания может не хватить, ведь минимальное напряжение питания NE555 4.5В. Но и от 5В все заработало как надо. Резистор в цепи светодиода оптосимистора уменьшил до 100 Ом. Индикаторный светодиод должен быть с током 20мА.![]() Светодиоды с меньшим током можно подключить параллельно оптосимисторному через свой токоограничивающий резистор.
Светодиоды с меньшим током можно подключить параллельно оптосимисторному через свой токоограничивающий резистор.
Я собирался помимо паяльника регулировать мощность электроплиты на 1кВт, а для такой мощности уже нужен большой радиатор для симистора. Поэтому детали разместил в корпусе от реле изохрон м. В нем есть две розетки и два позиционных переключателя на 10 положений, которые я использовал вместо переменного резистора. Резисторы в переключателях поставил на 10кОм. Один переключатель регулирует длительность включенного состояния, а другой – длительность паузы. Двумя переключателями можно менять не только скважность колебаний, но и их периодичность.
Внутри корпуса поместилась плата регулятора и плата от зарядки телефона, а симистор с радиатором пришлось разместить снаружи, на дне корпуса.
Это радиатор из блока питания компьютера. При мощности нагрузки 1кВт нагревается до 40 градусов. Думаю и максимальные для BTA16-600 3кВт выдержит.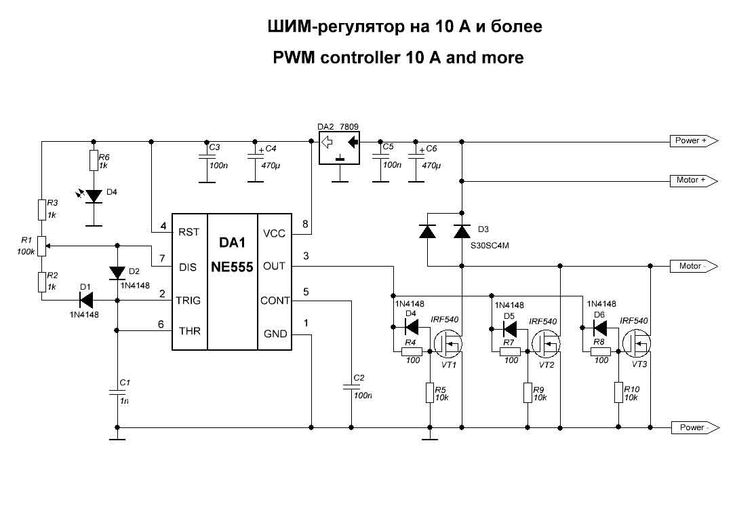 У симисторов серии BTA корпус изолирован от выводов, так что на радиаторе нет опасного напряжения.
У симисторов серии BTA корпус изолирован от выводов, так что на радиаторе нет опасного напряжения.
Если же нужно только паяльник регулировать, то симистор можно взять маломощный, например BT131-600, снабберную цепь убрать, детали разместить в более миниатюрном корпусе, а сетевой провод и провод паяльника припаять непосредственно к плате, без розеток. В таком формате обычно выполнены блоки питания ноутбуков.
Работа схемы на видео:
Регулятор оборотов электродвигателя коллекторного типа на ШИМ
Для регулировки частоты вращения маломощных электродвигателей коллекторного типа обычно применяют резистор, который включают последовательно с двигателем. Но такой способ включения обеспечивает очень низкий КПД, а самое главное не позволяет осуществлять плавную регулировку оборотов (найти переменный резистор достаточной мощности на несколько десятков Ом совсем не просто). А самый главный недостаток такого способа, это то, что иногда происходит остановка ротора при снижении напряжения питания.
А самый главный недостаток такого способа, это то, что иногда происходит остановка ротора при снижении напряжения питания.
ШИМ-регуляторы, речь о которых пойдет в этой статье, позволяют осуществлять плавную регулировку оборотов без перечисленных выше недостатков. Помимо этого ШИМ-регуляторы так же можно применять и для регулировки яркости ламп накаливания.
Рис.1.
На рис.1 приведена схема одного из таких ШИМ-регуляторов. Полевой транзистор VT1 является генератором пилообразного напряжения (с частотой повторения 150 Гц), а операционный усилитель на микросхеме DA1 работает как компаратор, формирующий ШИМ-сигнал на базе транзистора VT2. Частота вращения регулируется переменным резистором R5, изменяющим ширину импульсов. Благодаря тому, что их амплитуда равна напряжению питания, электродвигатель не будет «тормозить», а кроме этого можно добиться более медленного вращения, чем в обычном режиме.
Рис.2.
Схема ШИМ регуляторов на рис.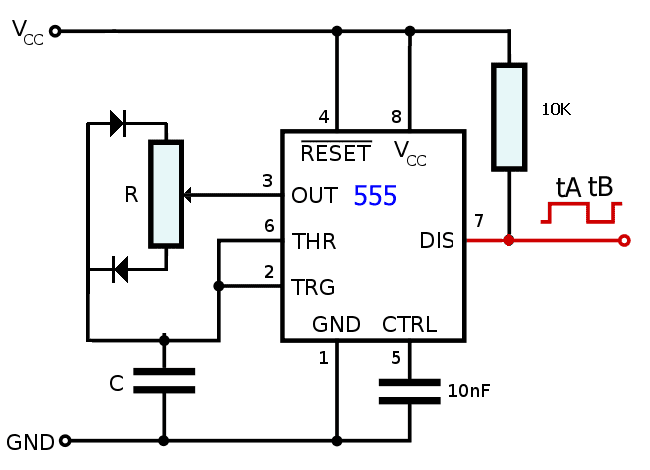 2 аналогична предыдущей, но задающий генератор здесь выполнен на операционном усилителе (ОУ) DA1. Этот ОУ функционирует в роли генератора импульсов напряжения треугольной формы с частотой повторения 500 Гц. Переменный резистор R7 позволяет осуществлять плавную регулировку вращения.
2 аналогична предыдущей, но задающий генератор здесь выполнен на операционном усилителе (ОУ) DA1. Этот ОУ функционирует в роли генератора импульсов напряжения треугольной формы с частотой повторения 500 Гц. Переменный резистор R7 позволяет осуществлять плавную регулировку вращения.
Рис.3.
На рис.3. представлена весьма интересная схема регулятора. Этот ШИМ регулятор выполнен на интегральном таймере NE555. Задающий генератор имеет частоту повторения 500 Гц. Длительность импульсов, а, следовательно, и частоту вращения ротора электродвигателя можно регулировать в диапазоне от 2 до 98 % периода повторения. Выход генератора ШИМ регулятора на таймере NE555 подключен к усилителю тока, выполненному на транзисторе VT1 и собственно управляет электродвигателем М1.
Главным недостатком схем рассмотренных выше является отсутствие элементов стабилизации частоты вращения вала при изменении нагрузки. А вот следующая схема, показанная на рис.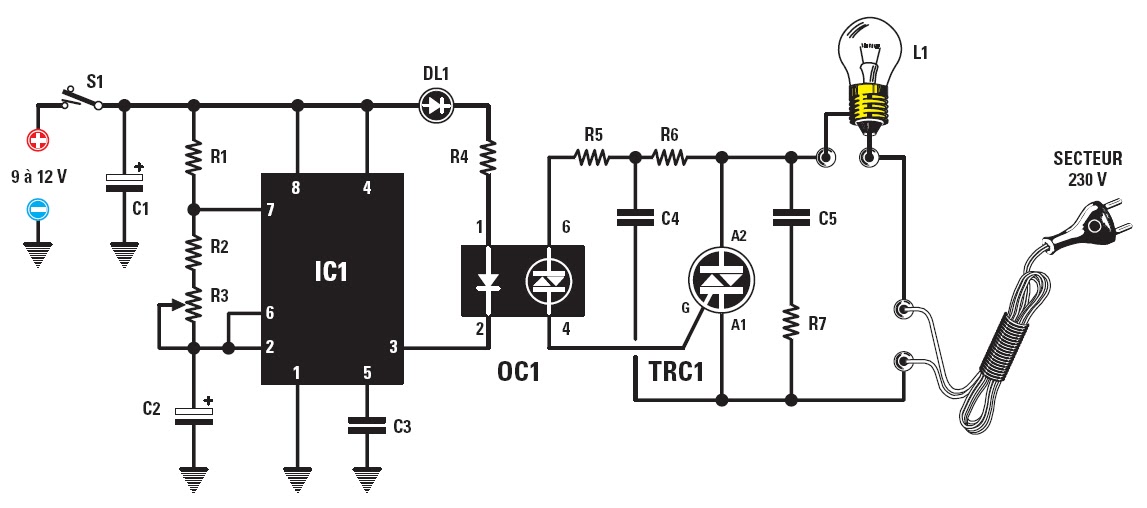 4., поможет решить эту проблему.
4., поможет решить эту проблему.
Рис.4.
Данный ШИМ регулятор как и большинство аналогичных устройств, имеет задающий генератор импульсов напряжения треугольной формы (частота повторения 2 кГц), выполненный на DA1.1.DA1.2, компаратор на DA1.3, электронный ключ на транзисторе VT1, а также регулятор скважности импульсов, а по сути частоты вращения электродвигателя – R6. Особенностью схемы является наличие положительной обратной связи посредством резисторов R12, R11, диода VD1,конденсатора C2, и DA1.4, которая обеспечивает постоянную частоты вращения вала электродвигателя при изменении нагрузки. При подключении ШИМ регулятора к конкретному электродвигателю при помощи резистора R12 производится регулировка глубины ПОС, при которой не возникает автоколебаний частоты вращения при увеличении или уменьшении нагрузки на вал двигателя.
Элементная база. В приведенных в статье схемах можно использовать следующие аналоги деталей: транзистор КТ117А можно заменить на КТ117Б-Г или как вариант на 2N2646; КТ817Б – КТ815, КТ805; микросхему К140УД7 на К140УД6, или КР544УД1, ТL071, TL081; таймер NE555 на С555, или КР1006ВИ1; микросхему TL074 на TL064, или TL084, LM324. Если необходимо подключить к ШИМ-регулятору более мощную нагрузку ключевой транзистор КТ817 необходимо заменить более мощным полевым транзистором, как вариант, IRF3905 или подобным. Указанный транзистор способен пропускать токи до 50А.
Если необходимо подключить к ШИМ-регулятору более мощную нагрузку ключевой транзистор КТ817 необходимо заменить более мощным полевым транзистором, как вариант, IRF3905 или подобным. Указанный транзистор способен пропускать токи до 50А.
Подготовлено по материалам статьи: А.В. Тимошенко, Радіоаматор №4, 2008г.
Симисторный регулятор мощностиЭлектронный регулятор температуры жала электропаяльника
Войдите чтобы комментировать
ШИМ-контроллер двигателя постоянного тока с использованием микросхемы таймера NE555
Чем больше время включения последовательности импульсов, тем больше будет рабочий цикл . И, следовательно, больше будет скорость двигателя постоянного тока. На изображении ниже вы можете увидеть ШИМ с различными рабочими циклами.
Мы используем IC 555 для генерации прямоугольной волны и управления рабочим циклом. Дополнительные сведения о IC 555 см. в техническом описании.
Компоненты:
- У1 555 ИК
- Р1 10к
- Р2 10к
- Р3 1k
- Р4 1k
- Потенциометр RV1 100k
- C1 10 мкФ (25 В, электролитический)
- С2 10 нФ
- Q1 IRFZ44N MOSFET (в соответствии с текущими требованиями)
- Д1 1Н4148
- Двигатель постоянного тока
Цепь:
IC 555 работает в нестабильном режиме. Частота зависит от пассивных компонентов — резисторов и конденсаторов.
Частота зависит от пассивных компонентов — резисторов и конденсаторов.
Скорость двигателя можно изменить с помощью RV1 (потенциометр). если мы увеличим рабочий цикл, скорость будет увеличиваться, и наоборот. Вы можете изменить MOSFET в соответствии с вашими текущими требованиями.
Схема ШИМ-контроллера Объяснение:Как показано на приведенной выше схеме, схема содержит таймер 555, конденсатор ( 10 мкФ и 10 нФ ), два потенциометра ( 4 кОм и 10 кОм 10 кОм). IRFZ44N ), двигатель постоянного тока с диодной защитой ( 1N448 используется для высокочастотного переключения. 555 таймер прочитать эту статью
Приведенная выше схема представляет собой ШИМ-регулятор 12В, это самая эффективная и простая схема. Она работает лучше, чем предыдущая схема, которая также имеет два потенциометра, здесь у нее есть два диода, которые контролируют направление тока. С помощью ШИМ мы изменяем выходной ток в единицу времени и среднее выходное напряжение, за счет которого изменяется выходная мощность.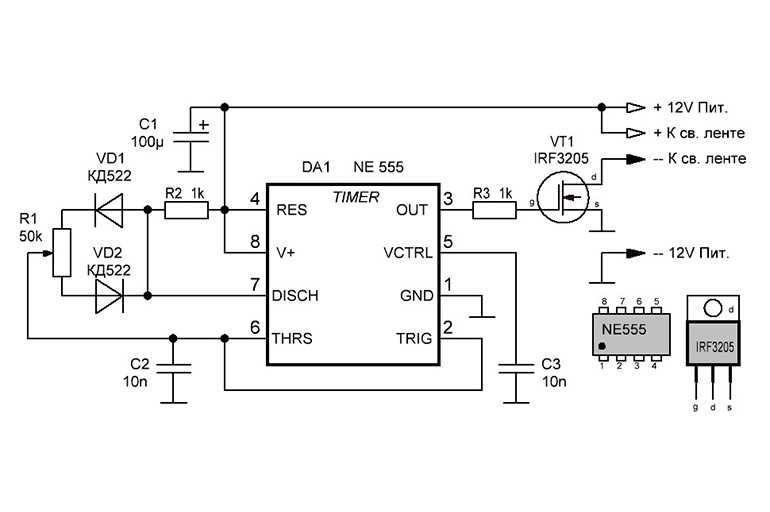
Соединения:Генератор, управляемый напряжением, на микросхеме ГУН LM566
- Таймер 555 представляет собой 8-контактную микросхему, которая может генерировать тактовые импульсы различной частоты.
- Контакты 4 и 8 подключены к Vcc.
- Между контактами 7 и 8 имеется резистор 1 кОм.
- Два противоположных диода подключены к контакту 7.
- Две фиксированные клеммы потенциометра на 100 кОм подключены к двум диодам.
- Переменная клемма потенциометра 100k подключена к контакту 6.
- Конденсатор 10 мкФ подключен к контакту 6.
- конденсатор 100nf подключен к контакту 5.
- Контакты 2 и 6 закорочены.
- контакт 3 подает ШИМ-выход на затвор полевого МОП-транзистора через резистор 9 кОм.0233 (вы должны изменить его в соответствии с требованиями).
- IRFZ44N представляет собой N-канальный полевой МОП-транзистор , имеющий высокий ток стока 49 А и низкое значение Rds 17,5 мОм.
 Он также имеет низкое пороговое напряжение 4 В, при котором MOSFET начинает проводить. Следовательно, он обычно используется с микроконтроллерами для управления напряжением 5 В.
Он также имеет низкое пороговое напряжение 4 В, при котором MOSFET начинает проводить. Следовательно, он обычно используется с микроконтроллерами для управления напряжением 5 В. - Вы можете использовать любой двигатель в зависимости от ваших требований и использовать соответствующий быстродействующий переключающий транзистор.
В ШИМ-контроллере таймер 555 генерирует сигнал ШИМ, когда в цепь подается напряжение VCC, конденсатор c1 начинает заряжаться через резистор VR1 и VR2 , когда конденсатор заряжается до пороговое напряжение (напряжение, при котором выходной сигнал изменяется на 0 или 1).
Транзистор на выводе 7 срабатывает, что в конечном счете запускает разрядку конденсатора C1 зарядку и разрядку раз не то же самое как во время зарядки оба резистора задействованы, тогда как во время разрядки задействован только VR2 что приводит к прямоугольной волне (не прямоугольной), она имеет неодинаковое время включения и выключения.
Необходимо посмотреть это видео для лучшего понимания .0233 соотношение сопротивлений двух потенциометров.
Если мы изменим POT (потенциометр) VR2, оставив VR1 0 Ом, минимальный рабочий цикл будет 50% . тогда как если используются оба POT, то минимальный рабочий цикл может быть ниже 10% до 5% . Рабочий цикл может варьироваться, но частота выходной волны останется постоянной.
Используя эту схему, мы можем получить желаемый ШИМ-сигнал постоянной частоты.
Как ШИМ-сигнал управляет скоростью двигателя постоянного тока?Двигатель постоянного тока работает по принципу электромагнетизма . когда ток течет по проводнику, он создает электромагнитное поле . На это поле также влияет внешнее магнитное поле .
Ротор и статор: В двигателе постоянного тока есть ротор и статор . Ротор изготовлен из электромагнитов, они представляют собой проводники, намотанные на металл железа. Статор не что иное, как пара постоянные магниты противоположной полярности закреплены на внутреннем корпусе двигателя. Когда ток протекает через электромагниты, они создают магнитное поле и отталкиваются статорами, сила, создаваемая электромагнитами, прямо пропорциональна току, протекающему через него, а также напряжению на нем.
Статор не что иное, как пара постоянные магниты противоположной полярности закреплены на внутреннем корпусе двигателя. Когда ток протекает через электромагниты, они создают магнитное поле и отталкиваются статорами, сила, создаваемая электромагнитами, прямо пропорциональна току, протекающему через него, а также напряжению на нем.
Итак, возникает сложный момент: когда мы подаем высокочастотный сигнал с низким рабочим циклом (время включения) , количество тока , протекающего через катушки, напрямую влияет на и .0233 уменьшает. аналогичным образом, когда мы увеличиваем рабочий цикл, ток протекающий через катушку увеличивает приводя к очень высокой скорости вращения .
меры предосторожности: Частота рабочего цикла должна быть достаточно высокой. Если частота рабочего цикла слишком низкая, это вызовет рывок двигателя, а также шум . Чтобы этого избежать, частота должна быть достаточно высокой для плавного вращения.
