
Особенности контура регулирования тока при широтно-импульсном управлении
Введение
Контур регулирования тока как самостоятельная подчиненная система регулирования очень часто используется в электроприводе и в источниках вторичного электропитания [1]. Основная его задача — ограничение тока на допустимом уровне для защиты силовых элементов (тиристоров, MOSFET, IGBT) от перегрузки по току и полное использование их по току в переходных режимах для повышения быстродействия системы.
Высокая частота коммуникации силовых элементов статических преобразователей позволяет рассчитывать реальные импульсные системы по их непрерывным моделям. Однако возможны ситуации, в которых импульсный характер системы проявляется нежелательными субгармоническими автоколебаниями, приводящими к неравномерной загрузке силовых полупроводниковых элементов и к возможному выходу их из строя вследствие превышения допустимого тока. В выходных параметрах системы (скорости, угле поворота или напряжении) эти субгармонические автоколебания по причине их высокой частоты (в большинстве случаев всего в 2 раза меньшей частоты коммутации) практически незаметны.
Задача исключения субгармонических автоколебаний решается при расчете контура регулирования тока, поскольку основные контуры регулирования, значительно более инерционные, оказывают на возникновение субгармонических автоколебаний пренебрежимо малое влияние.
Для нахождения условия возникновения нежелательных автоколебаний необходимо рассмотреть контур регулирования тока как нелинейную импульсную систему, каковой он и является.
Ниже приведен анализ контура регулирования тока с учетом импульсного характера управления, выполненный с использованием элементарного математического аппарата и позволяющий понять физическую природу возникновения нежелательных колебаний и способы их устранения.
1. Математическая модель контура регулирования тока
С точки зрения строгого ограничения тока предпочтительным оказывается безынерционный (пропорциональный) регулятор тока. Поддержание же постоянного тока при изменении напряжения на нагрузке требует интегрального регулятора.
В качестве примера рассмотрим контур регулирования тока понижающего преобразователя напряжения постоянного тока, представленный на рис. 1. Широтно-импульсный преобразователь состоит из мощного полевого транзистора VT, обратного диода VD, сглаживающего фильтра, содержащего дроссель Др и конденсатор С, широтно-импульсного модулятора ШИМ с напряжением развертки, получаемым интегрированием напряжения питания ![]() Задающее напряжение U3T на вход подчиненного регулятора тока подается с выхода регулятора напряжения преобразователя (на рис. 1 не показан), с датчика тока ДТ снимается напряжение обратной связи по току
Задающее напряжение U3T на вход подчиненного регулятора тока подается с выхода регулятора напряжения преобразователя (на рис. 1 не показан), с датчика тока ДТ снимается напряжение обратной связи по току
U0C = RшI, (1)
где Rш — крутизна ДТ, имеющая размерность сопротивления.
Рис. 1
С датчика напряжения ДН снимается сигнал положительной обратной связи по напряжению нагрузки.
U+ = ?Uн, (2)
где ? — крутизна ДН.
При описании процессов в контуре регулирования тока будем полагать, что он работает в режиме непрерывного тока.
Входное напряжение UЗТ и напряжение на нагрузке Uн положим постоянными, поскольку ток изменяется намного быстрее напряжения. Причина этого в малой индуктивности дросселя, необходимой для получения достаточно малых пульсаций тока, вследствие высокой частоты коммутации. Пренебрежем влиянием снабберных цепей, не показанных на рис. 1. Транзистор VT и обратный диод VD будем считать идеальными.
Пренебрежем влиянием снабберных цепей, не показанных на рис. 1. Транзистор VT и обратный диод VD будем считать идеальными.
При этих допущениях ток дросселя Др i(t) в n-ом периоде коммутации nТ<t < nТ + τn линейно возрастает под действием разности напряжения питания E и напряжения на нагрузке Uн, приложенной к дросселю Др:
(3)
где in = i(nТ) — значение тока в начале n-го периода коммутации, L — индуктивность дросселя Др. В момент закрытия транзистора VT ток принимает значение
(4)
и до конца периода, то есть в течение времени nT+τn<t <(n+1) T, линейно уменьшается под действием напряжения Uн, приложенного к дросселю Др через обратный диод VD:
(5)
В конце n-ого и начале n+1-го периода коммутации ток принимает значение
(6)
Длительность подключения источника питания E к нагрузке (через дроссель Др) τn определяется моментом равенства величин выходного напряжения регулятора тока UРТ и пилообразного напряжения развертки ШИМ:
-UРТ (nT+ τn) + α τn = 0, (7)
где α — крутизна напряжения развертки.
Выходное напряжение регулятора тока составляет
(8)
где
В момент закрытия VT t = nT + τn с учетом (4) имеет значение
(9)
Подстановка UРТ (nT+ τn) в уравнение ШИМ (7) дает
(10)
Таким образом, подставив значение τn в формулу (6), получаем уравнение, которое связывает значения тока в моменты, соответствующие началу соседних периодов коммутации (n+1-го и n-го). Это уравнение называется разностным:
Поскольку сверху величина τn ограничена предельным значением
τn < τmax , τmax < T, (14)
формула (10) справедлива при условии
(UЗТ + K + ? Uн — KiRmin)KPT≤ [α + KiRm KPT (E — Uн)/L] τmax ,
или
in> {[UЗТ+ K+ ?Uн] KРТ — [α + KiR шKРТ(E- U
При in < Imin τn принимает предельное значение τn = τmax, а разностное уравнение контура согласно (4) имеет вид:
(15)
Естественное ограничение величины τn снизу (τn > 0) приводит к тому, что при условии
in> (UРТ+ K+ ? U)/ KiRн = Imax, (16)
τn = 0. Согласно формуле (6) получаем разностное уравнение контура регулирования тока в виде:
(17)
Разностное уравнение контура регулирования тока позволяет легко вычислить значения тока i ( nT) при n = 0, 1, 2,…, соответствующие началам последовательных периодов коммутации (или концам предыдущих периодов). Для этого достаточно задать начальное значение тока — значение тока в начале нулевого периода i(0) — и последовательным вычислением по формулам (11, 15, 17) определить все последующие значения i(nT), n = 1, 2, 3… Характер изменения тока внутри n-го периода коммутации определяется формулами (3, 5).
2. Желательный установившийся режим
Для нормальной работы контура необходимо, чтобы переходный процесс изменения тока заканчивался установившимся режимом, при котором ток в каждом периоде коммутации при постоянном задающем сигнале (UЗТ = const) изменялся бы одинаково. Следовательно, и значения тока в начале каждого периода должны быть одинаковыми:
in = in+1 = i?, τn = τn+1 = τ? . (18)
Из уравнения (6) очевидно, что в установившемся режиме должно удовлетворяться условие
(19)
В линейной зоне работы ШИМ (0 < τn < τmax) задающему воздействию UЗТ соответствует значение
(20)
Из выражения (20) видно, что приращение UЗТ вызывает пропорциональное приращение i?.
Среднее значение тока, или его постоянная составляющая, равная полусумме максимального и минимального значений тока в периоде коммутаций (рис. 2), определяется по формуле:
2), определяется по формуле:
(21)
Рис. 2
Очевидно, эта составляющая превосходит минимальное значение imin = i? на половину размаха пульсаций тока δI.
Подставляя в формулу (21) значения τ? и i? согласно выражениям (19) и (20), можно найти значение коэффициента положительной обратной связи по напряжению, необходимое для исключения влияния E и U н на величину среднего значения тока. С учетом получения напряжения развертки ШИМ интегрированием напряжения питания Е интегрирующей RC-цепочкой с периодическим разрядом конденсатора а имеет значение α = Е /RC, а необходимое произведение коэффициентов ? K+ определяет формула
(22)
где КП = RC/ Т- коэффициент усиления широтно-импульсного преобразователя по постоянному току,
При выполнении условия (22) получаем
(23)
Рассчитанная по непрерывной модели контура регулирования тока, не учитывающей пульсации тока, необходимая величина К+? имеет значение [2]
(24)
совпадающее с точным значением только при γ? = 1. Вследствие этого при К+?, рассчитанном по формуле (24), реальное значение I отличается от определяемого формулой (23) на величину
Вследствие этого при К+?, рассчитанном по формуле (24), реальное значение I отличается от определяемого формулой (23) на величину
(25)
Величина δI, согласно формуле (25), не превосходит обычно единиц процентов от максимального тока контура, что объясняется малым значением Т и, следовательно, малым размахом пульсаций. Таким образом, выбрав величину К+ ? по формуле (24), то есть по непрерывной модели контура, получаем практическую независимость тока от Uн.
Можно показать, используя выражения (4), (19), (20) и (24), что при выполнении условия (24) в установившемся режиме максимальное значение тока в каждом периоде коммутации
Иное дело — существование желательного установившегося режима. По непрерывной модели контура определить условие существования этого режима невозможно.
3. Условие существования желательного установившегося режима
Для его определения рассмотрим графический способ решения разностного уравнения для контура регулирования тока. Построим график правой части уравнения, определяемый в зависимости от величины in одним из выражений (11, 15, 17).
Построим график правой части уравнения, определяемый в зависимости от величины in одним из выражений (11, 15, 17).
На рис. 3 представлена зависимость in+1 = f (in), которая соответствует положительному значению λ, меньшему 1 (0< λ < 1). Пересечение графика с биссектрисой первого координатного угла, описываемой уравнением λ n+1 = λ n, дает установившееся значение тока i?. Переходный процесс установления i? строится следующим образом. По графику in+1 = f ( in) для текущего значения in определяется следующее значение in+1. Затем, полагая in+1 за текущее значение, по тому же графику определяют следующее значение in+2. Для этого значение in+1 с оси ординат переносится на ось абсцисс через биссектрису первого координатного угла. Для нулевого начального значения тока (i0 = 0) процесс построен по описанному алгоритму на рис. 3. Там же построен процесс при iw < i ‘0 < < Imax без нанесения значений последовательности i’0, i’1, i ‘2,… на ось ординат.
3. Там же построен процесс при iw < i ‘0 < < Imax без нанесения значений последовательности i’0, i’1, i ‘2,… на ось ординат.
Рис. 3
Из проведенного графического анализа очевидно, что при 0 < λ < 1 значения тока монотонно возрастают при i0 < iw или убывают при i0 > i?, неограниченно приближаясь к установившемуся значению i?.
Для -1< λ < 0 на рис. 4 построен график функции in+1 = f(in) и аналогично предыдущему определена последовательность значений тока in: n = 0, 1, 2, 3,… при i0 = 0. Из рис. 4 видно, что значения in стремятся к i?, причем, начиная со значений, достаточно близких к iw, каждое последующее значение in лежит с противоположной стороны от i? по отношению к предыдущему.
Рис. 4
Особое положение занимает случай λ = -1 (рис. 5).
5).
Рис. 5
Из рис. 5 видно, что последовательность значений in не стремится к установившемуся значению i?. Начиная с некоторого значения (в примере с i 2), в контуре устанавливаются субгармонические автоколебания: i2 = i4 = i6= …, i3 = i5 = i7 = …; τ 2 = τ 4 = τ 6 = …, τ 3 = τ 5 = τ 7 = … Очевидно, τ 2 < τ 3. Это означает, что на входе фильтра, состоящего из дросселя Др и конденсатора С, действует последовательность прямоугольных импульсов uф ( t) с чередующейся длительностью (рис. 6). Это вызывает появление во входном напряжении фильтра uф ( t) гармоники половинной частоты 1/(2Т). Пульсации тока возрастают, нагрузка VT становится неравномерной, максимальное значение тока возрастает.
Рис. 6
Легко проверить, что амплитуда автоколебаний i2 — i? = i? — i3 зависит от начального значения i0. При i’0, например, амплитуда субгармонических автоколебаний, как показано на рис. 5, равна нулю, то есть они не проявляются.
При i’0, например, амплитуда субгармонических автоколебаний, как показано на рис. 5, равна нулю, то есть они не проявляются.
При λ < -1 в контуре регулирования тока желательный установившийся режим существовать не может. Даже если при определенном начальном значении i0 (рис. 7) контур попадает в желательный установившийся режим i0, i 1 = iт = i2 = i 3 = …, длительное время это состояние наблюдаться не будет.
Рис. 7
Достаточно небольшого отклонения от желательного установившегося режима δi, вызванного помехой или другим возмущением, чтобы в контуре начался переходный процесс, переводящий его из желательного установившегося режима в режим субгармонических автоколебаний (рис. 7).
Таким образом, для исключения нежелательных субгармонических автоколебаний контура регулирования тока необходимо и достаточно выполнить неравенство
(26)
Из неравенства (26) следует эквивалентное ему условие
(27)
В случае α = E/(RC) условие (27) принимает вид
и выполнить его нужно при максимально возможном значении γ.
Очевидно, при γ < 1/2 неравенство (27) выполняется при всех реальных (положительных) параметрах контура. Это значит, что при γ < 1/2 субгармонические колебания в контуре регулирования тока невозможны. Указанное обстоятельство имеет простой физический смысл, который несложно уяснить.
Для этого рассмотрим отклонения значений тока in от установившегося значения iw при 0 < τn < τmax. Вычитая из разностного уравнения (11) очевидное тождество
i? = λ i? + I,
получаем
δ in+1 = λδin, (28)
где δin+1 = in+1 — i?, δin = in— i?.
Из разностного уравнения для отклонений от установившегося режима (28) очевидно, что при -1 < λ < 1
(29)
то есть каждое последующее отклонение от установившегося режима по величине меньше предыдущего. Это означает возвращение контура в установившийся режим при отклонениях от него, вызванных каким-либо возмущением (устойчивость установившегося режима). Из рис. 8, на котором показаны два закона изменения тока: установившийся iуст (t) и i(t), вызванный отклонением δin = in — i?, очевидно выполнение неравенства (29) при
Из рис. 8, на котором показаны два закона изменения тока: установившийся iуст (t) и i(t), вызванный отклонением δin = in — i?, очевидно выполнение неравенства (29) при
δ τ ‘n > δ τ »n. (30)
Рис. 8
С учетом равенства
δ τ ‘n + δ τ »n = | δ τ n|
неравенство (30) можно записать в виде
δ τ ‘n > 1/2 |δ τ n|. (31)
Из треугольника abc с учетом угловых коэффициентов кривой тока в первой ((E-Uн)/L) и во второй (- Uн )/L) части периода коммутации легко выразить δ τ ‘n:
(32)
Выражение (10) позволяет получить приращение длительности импульса в n-ом периоде коммутации, вызванное приращением тока δin:
(33)
Легко оценить величину δ τ n
(34)
Деление выражения (32) на (34) дает
откуда становится очевидным выполнение условия (31) при γ < 1/2.
4. Выбор величины λ
Среди множества значений λ, обеспечивающих существование (устойчивость) желаемого установившегося режима, наилучшим является значение
λ = 0, (35)
поскольку обеспечивает окончание переходного процесса в линейной зоне ШИМ (0 < τ n < τ max) всего за один период коммутации. На рис. 9 построен переходный процесс в контуре при λ = 0.
Рис. 9
Из рис. 9 очевидно, что после попадания i2 в линейную зону ШИМ все остальные значения in, n = 3, 4, 5, … равны установившемуся значению i?.
Приравняв (12) к нулю, получаем условие получения нулевого λ:
(36)
Поскольку, как указано выше, α = E/RC, то (36) имеет вид
(37)
Из (37) видно, что при изменяющемся значении входного напряжения E вследствие изменения γ = Uн /E можно получить γ = 0 только для фиксированного значения E (например, путем установки необходимой величины КPT). Это значение надо выбрать так, чтобы получить наиболее близкое к нулю значение γ при всех возможных величинах E.
Это значение надо выбрать так, чтобы получить наиболее близкое к нулю значение γ при всех возможных величинах E.
5. Моделирование контура регулирования тока
Рассмотренный метод анализа контура позволяет понять характер процессов в нем, выяснить причины нежелательных субгармонических автоколебаний и способы их устранения. Однако использование графических построений ограничивает его точность и делает трудоемким. Значительно более точный и быстрый метод анализа процессов в контуре — математическое моделирование с использованием, например, системы MatLab-Simulink.
Построив математическую модель (рис. 10), можно легко исследовать влияние параметров контура на его свойства. В рассматриваемом случае более простой оказывается модель, не использующая элементы библиотеки Sim Power Sistem.
Рис. 10
Широтно-испульсный модулятор состоит из генератора «пилы» и релейного элемента Relay. Генератор «пилы» построен на интеграторе (Integrator 1), периодически сбрасываемом на ноль. На его вход с блока Constant 3 подается значение α = E/RC. Период пилы (период коммутации в контуре) задается генератором Pulse Generator1. Разность сигнала управления и «пилы» подается на релейный элемент Relay с гистерезисной характеристикой. При нулевом входном сигнале Relay изменяет выходной сигнал со значения E/L на нулевое. Восстановление значения E/L происходит при достаточно большом положительном входном сигнале. Достаточный гистерезис реле исключает возможность повторного срабатывания в текущем периоде коммутации. Восстановление выходного сигнала E/L реле производится коротким импульсом генератора Pulse Generator, сбрасывающим одновременно «пилу» на ноль в начале периода. Амплитуда импульса превосходит сумму минимального входного сигнала реле и его гистерезиса. Ограничение ширины импульсов модулятора (τ < τmax) производится за счет ограничения управляющего сигнала блоком Saturation.
На его вход с блока Constant 3 подается значение α = E/RC. Период пилы (период коммутации в контуре) задается генератором Pulse Generator1. Разность сигнала управления и «пилы» подается на релейный элемент Relay с гистерезисной характеристикой. При нулевом входном сигнале Relay изменяет выходной сигнал со значения E/L на нулевое. Восстановление значения E/L происходит при достаточно большом положительном входном сигнале. Достаточный гистерезис реле исключает возможность повторного срабатывания в текущем периоде коммутации. Восстановление выходного сигнала E/L реле производится коротким импульсом генератора Pulse Generator, сбрасывающим одновременно «пилу» на ноль в начале периода. Амплитуда импульса превосходит сумму минимального входного сигнала реле и его гистерезиса. Ограничение ширины импульсов модулятора (τ < τmax) производится за счет ограничения управляющего сигнала блоком Saturation.
Разность выходного сигнала Relay и сигнала блока Constant 1, равного Uн /L, подается на вход интегратора (Integrator), выходной сигнал которого дает значения тока. Регулятор тока представлен сумматором Sum 2, блоками усиления Gain, Gain 1, Gain 2 и блоком Constant 2. Коэффициенты усиления блоков равны соответственно КPT, ?K+L и KiRш. С выхода блока Constant 2 поступает сигнал задания UЗТ.
Регулятор тока представлен сумматором Sum 2, блоками усиления Gain, Gain 1, Gain 2 и блоком Constant 2. Коэффициенты усиления блоков равны соответственно КPT, ?K+L и KiRш. С выхода блока Constant 2 поступает сигнал задания UЗТ.
При практическом использовании модели необходимо особо внимательно отнестись к выбору параметров моделирования, например, ограничить максимальный шаг моделирования так, чтобы на период коммутации Т приходилось достаточное количество точек.
В качестве примера приведены результаты моделирования контура при следующих значениях его параметров: Т= 32×10-6 с, Е = 160 В, Uн = 100 В, L = 11×103 Гн, КiRш = 2 Ом, R = 5,6×105 Ом, С= 1,1×10-9 Ф,
Для оптимального значения λ = 0 рассчитаны необходимый коэффициент
и значение
На рис. 11 представлены осциллограммы отработки скачка задающего воздействия контура UЗТ = 2 В при нулевых начальных условиях, полученные с помощью осциллографа Scope. Масштабирующий усилитель Gain 3 с коэффициентом L/E позволил уменьшить амплитуду импульсов на выходе широтно-импульсного преобразователя со 160 до 1. Из рис. 11 видно, что в конце шестого периода переходный процесс входит в линейную зону и, начиная с седьмого периода, наблюдается установившийся режим работы. Отклонение среднего значения тока в установившемся режиме от значения UЗТ /КiRш составляет 0,055 А, что согласуется с формулой (25).
Масштабирующий усилитель Gain 3 с коэффициентом L/E позволил уменьшить амплитуду импульсов на выходе широтно-импульсного преобразователя со 160 до 1. Из рис. 11 видно, что в конце шестого периода переходный процесс входит в линейную зону и, начиная с седьмого периода, наблюдается установившийся режим работы. Отклонение среднего значения тока в установившемся режиме от значения UЗТ /КiRш составляет 0,055 А, что согласуется с формулой (25).
Рис. 11
На рис. 12 представлен аналогичный процесс для случая λ = -1 (KPТ = 2 α L/[КiR ш (2Uн-E)] = 71,5, ?K+L = 8×10-6). Из рис. 12 видно, что сразу после вхождения процесса в линейную зону устанавливаются субгармонические колебания половинной частоты, как это и следует из графического анализа разностного уравнения (рис. 5).
Рис. 12
Процесс, представленный на рис. 13, соответствует случаю λ = -1,5 (KPT= 2,5α L/[КiRш (2,5Uн— 1,5E)] = 357,5, ? K+L = 1,6×10-6).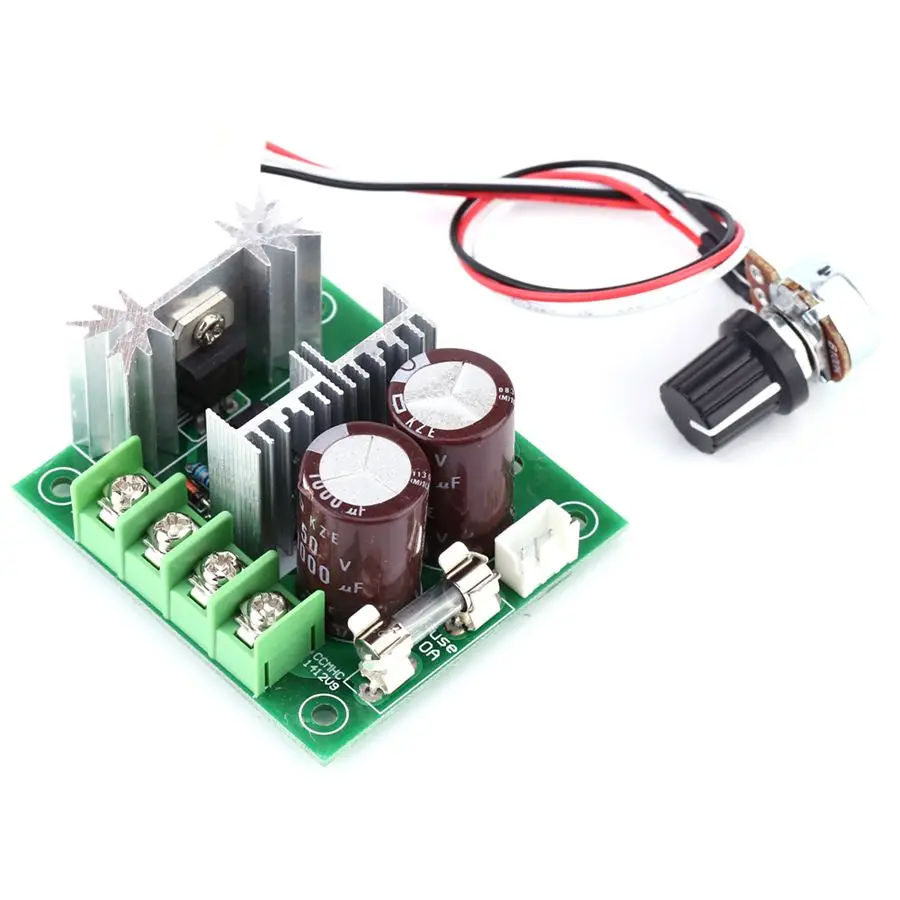 Как видно из рис. 13, показанный отрезок процесса далек от установившегося режима и сопровождается значительно возросшими пульсациями, носящими хаотический характер. Ответ на вопрос, останется процесс хаотическим или установятся периодические субгармонические автоколебания, требует дополнительных исследований, но имеет чисто теоретическое значение, поскольку оба этих режима должны быть исключены при расчете контура.
Как видно из рис. 13, показанный отрезок процесса далек от установившегося режима и сопровождается значительно возросшими пульсациями, носящими хаотический характер. Ответ на вопрос, останется процесс хаотическим или установятся периодические субгармонические автоколебания, требует дополнительных исследований, но имеет чисто теоретическое значение, поскольку оба этих режима должны быть исключены при расчете контура.
Рис. 13
Выводы
- При нарушении условий устойчивости желательного установившегося режима в контуре регулирования тока наблюдаются нежелательные колебательные режимы с частотой, меньшей частоты коммутации.
- Для устойчивости желательного установившегося режима достаточно обеспечить параметр λ разностного уравнения контура большим -1. При относительной длительности импульсов γ, меньшей 0,5, это условие всегда выполняется.
- Оптимальным по быстродействию контура регулирования тока при его работе в линейной зоне является значение λ = 0.
- Постоянная составляющая установившегося тока контура, рассчитанная по его непрерывной модели, больше реальной на половину размаха пульсаций тока.
- Коршунов А. И. Динамический расчет стабилизированного понижающего преобразователя постоянного тока // Силовая электроника. 2005. № 3.
Транзисторный широтно-импульсный регулятор напряжения для асинхронных электродвигателей Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
УДК 621.3
О. Н. Парфенович, канд. техн. наук, доц., О. А. Капитонов
ТРАНЗИСТОРНЫЙ ШИРОТНО-ИМПУЛЬСНЫЙ РЕГУЛЯТОР НАПРЯЖЕНИЯ ДЛЯ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
В статье приведены результаты исследования транзисторного широтно-импульсного регулятора напряжения для асинхронных электродвигателей. Даны графики напряжений и токов в силовых ключах и обмотках электродвигателя, полученные методом компьютерного моделирования в среде МЛТЬЛБ. Показано улучшение соєф и КПД электропривода при работе в зоне нагрузок, меньших номинальных, и на регулировочных характеристиках.
Даны графики напряжений и токов в силовых ключах и обмотках электродвигателя, полученные методом компьютерного моделирования в среде МЛТЬЛБ. Показано улучшение соєф и КПД электропривода при работе в зоне нагрузок, меньших номинальных, и на регулировочных характеристиках.
В настоящее время в промышленно развитых странах существует тенденция использовать только регулируемые, так называемые интеллектуальные электродвигатели, что, в целом, при их эксплуатации уже сейчас дает свыше 10… 15 % экономии электроэнергии. В частности, не менее 40 % электроэнергии потребляют различного рода нагнетатели (насосы, вентиляторы и пр.), которые в большинстве своем приводятся в движение нерегулируемыми электродвигателями. Установка же в нагнетателях вместо дросселирования регулируемых электродвигателей дает экономию электроэнергии – до 40.50 %, воды -15.20 %, тепла – до 20 %.
Весьма эффективно использование регулируемых интеллектуальных, энергосберегающих электродвигателей и в машиностроении, в этом деле, по данным зарубежных источников, экономят до 15. 20 % электроэнергии и до 10.15 % электродвигателей.
20 % электроэнергии и до 10.15 % электродвигателей.
Западноевропейские электротехнические концерны ABB, «Сименс», «Дор-фос», японские – «Хитачи», «Тошиба», американская «Аналог Дэвис» и др. расширяют функциональные возможности асинхронных электродвигателей за счет применения частотных преобразователей, сработанных на основе новых IJBT- и MOSFET-технологий.
Мы предлагаем для решения задач энергосбережения в стандартных электродвигателях использовать регуляторы напряжения, которые могут
быть в 4.5 раз дешевле частотных, а для расширения функциональных возможностей электродвигателей (регулирование частоты вращения, пуска, торможения и пр.), снижения на единицу мощности их массогабаритных характеристик (стали, меди) использовать специальную, разработанную нами конструктивную концепцию асинхронного с короткозамкнутым ротором электродвигателя с двухроторной электромеханикой ДАС-12 и регулятором напряжения в электромехатронном исполнении [1].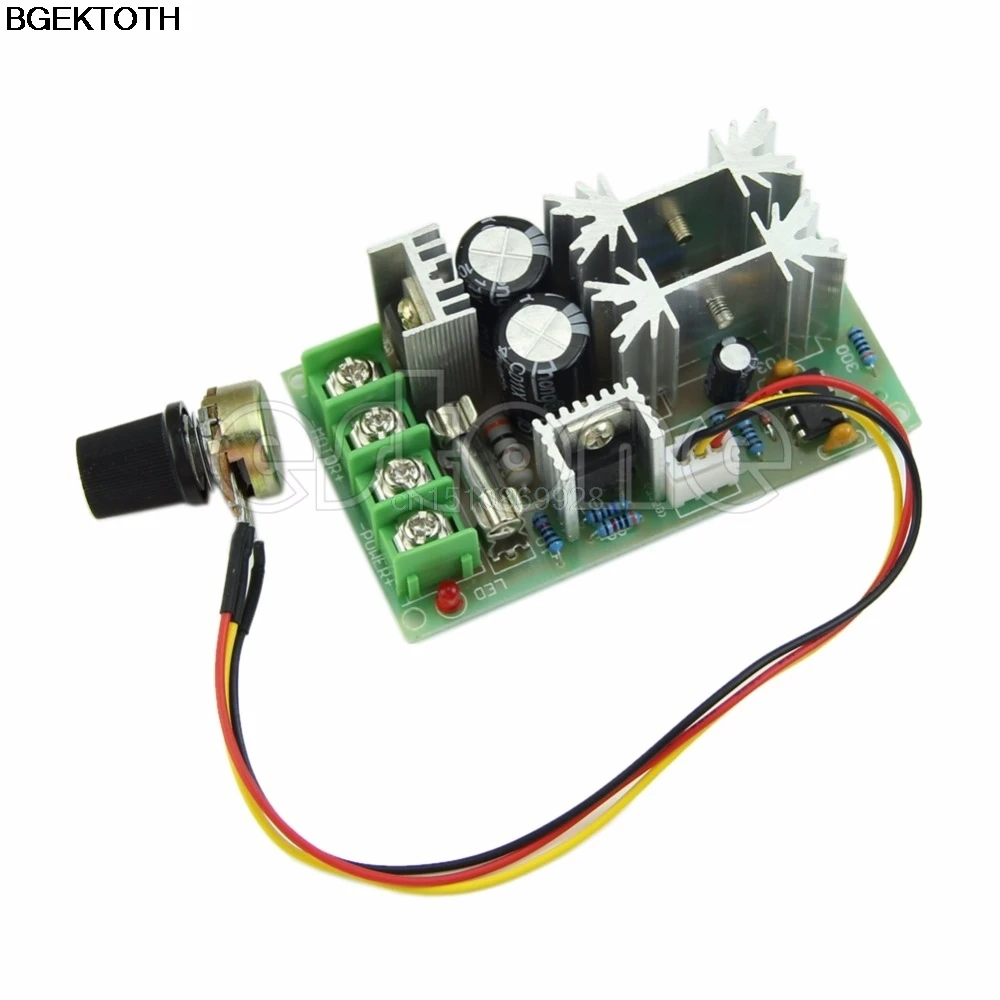
В качестве регулятора напряжения для данного электродвигателя можно применить общеизвестный тиристорный регулятор напряжения с фазовым управлением. Нами разрабатывается транзисторный регулятор напряжения, работающий на модулируемой частоте 4.10 кГц. Функциональная схема такого регулятора приведена на рис. 1. Результаты испытания показали достаточную эффективность подобного технического решения регулирования напряжения в цепи обмотки статора электродвигателя.
Схема предлагаемого регулятора работает следующим образом. При открытом состоянии силовых транзисторов на статор электродвигателя поступает напряжение питающей сети. При этом ток каждой из фаз электродвигателя протекает через фазу обмотки питающего трансформатора (сети), диодно-транзисторную группу и фазу обмотки статора электродвигателя.
При запирании силовых транзисторов реактивная мощность сети разряжается через входные конденсаторы, а реактивная мощность обмотки статора электродвигателя – через выходные.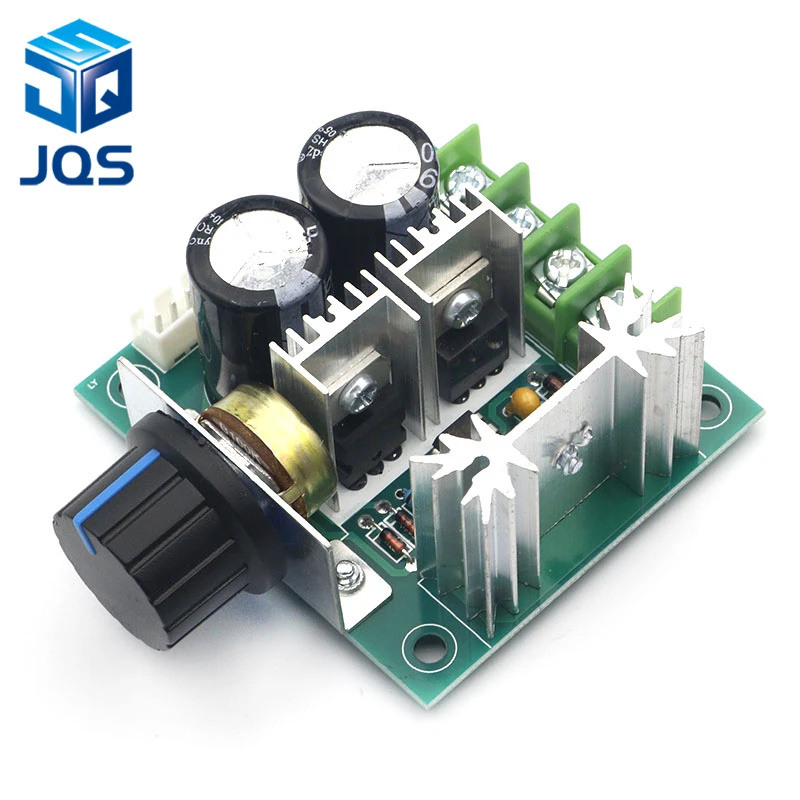
При этом напряжение на каждом из конденсаторов повышается либо понижается (в зависимости от направления тока). Для ограничения токов перезаряда конденсаторов последовательно с каждым конденсатором включены дроссели. После отпирания силовых транзисторов происходит процесс перезаряда конденсаторов.
Таким образом, в данной системе осуществляется широтно-импульсное
регулирование напряжения на статоре электродвигателя путем запирания и отпирания силовых транзисторов с определенной скважностью и частотой.
Преимущества данной системы регулирования перед обычной системой ТРН-АД (с фазовым управлением) обусловлены импульсным способом регулирования. Благодаря этому обеспечивается удовлетворительный гармонический состав токов статора электродвигателя, что обуславливает отсутствие пульсаций электромагнитного момента, вибраций и шумов при работе электродвигателя. Данная система лишена эффекта снижения cos ф при работе на регулировочных характеристиках, возникающего из-за того, что фазовый способ регулирования вносит фазовый сдвиг первой гармоники тока относительно напряжения.
Данная система лишена эффекта снижения cos ф при работе на регулировочных характеристиках, возникающего из-за того, что фазовый способ регулирования вносит фазовый сдвиг первой гармоники тока относительно напряжения.
При закрытом состоянии транзисторов силовые конденсаторы выполняют функцию компенсации реактивной
мощности, потребляемой обмоткой статора электродвигателя и питающей сети. Это позволяет повысить коэффициент мощности системы электропривода.
Система обладает лучшими энергетическими характеристиками, чем обычная ТРН-АД, благодаря лучшему гармоническому составу токов статора электродвигателя и более высокому ко -эффициенту мощности.
Были проведены исследования работы предлагаемой системы электропривода на компьютерной модели, реализованной в пакете МЛТЬЛВ/БІМи-ЬШК.![]() 2у, і*2у проекции обобщенных векторов пото-косцепления статора, напряжения на статоре, тока статора на ось 7.
2у, і*2у проекции обобщенных векторов пото-косцепления статора, напряжения на статоре, тока статора на ось 7.
Для проведения исследований работы регулятора была разработана компьютерная модель, реализующая численное интегрирование приведенной выше системы уравнений.
На рис. 2 представлена компьютерная модель исследуемого преобразователя в среде БГМЦЬШК.
При помощи полученной компьютерной модели проведены исследования электромагнитных процессов в элементах силового преобразователя и обмотках статора электродвигателя.
Ниже приведены временные диаграммы, полученные в результате компьютерного моделирования (рис. 3.8).
Исследование энергетических характеристик электропривода показало следующие результаты.
Величина реактивной мощности при работе электродвигателя ДАС-12 при питании непосредственно от сети и его работе в номинальном режиме определяется следующими данными.
Полная мощность электродвигателя:
Р.,
СОБ ф
(2)
3500
0,82
4268,29 ВА.
Реактивная мощность электродвигателя:
п = — р2 (3)
х-‘ном V ном ном 5 У У
пном = у/3658,532 – 30002 = 2443 вар.
Отсюда видно, что величина реактивной мощности соизмерима с номинальной активной мощностью электродвигателя.
Полная мощность при работе электродвигателя ДАС-12 от преобразователя с ШИМ регулятором:
Рис. 2. Компьютерная модель преобразователя в пакете МЛТЬЛВ/8ІМиЬШК
2. Компьютерная модель преобразователя в пакете МЛТЬЛВ/8ІМиЬШК
0,05 0,1 0,15 0,2 0,25 с 0,35
г———>-
Рис. 3. Ток силового транзистора во временном масштабе 1 см – 0,05 с
и
0,05 0,1 0,15 0,2 0,25 с 0,35
г———
Рис. 4. Напряжение на силовом транзисторе во временном масштабе 1 см – 0,05 с
0,3056 0,3058 0,306 с 0,3063
г———–>-
Рис. 5. Ток силового транзистора во временном масштабе 1 см – 1-10-4 с
123
I
I
юоо
В
900
800
700
600
500
400
300
200
100
о
А А А Л А
0,3056 0,3058 0,306 с 0,3063
г———–>-
Рис. 6. Напряжение на силовом транзисторе во временном масштабе 1 см – 1-10-4 с
6. Напряжение на силовом транзисторе во временном масштабе 1 см – 1-10-4 с
0,05 0,1 0,15 0,2 0,25 с 0,35
г———->-
Рис. 7. Ток фазы обмотки статора электродвигателя во временном масштабе 1 см – 0,05 с
и
-1000
-1500
-2000
Рис. 8. Линейное напряжение на фазах обмотки статора электродвигателя во временном масштабе 1 см – 0,05 с
I
I
Р„
СОБ ф
(4)
3500
ном. рег 0 96
рег 0 96
Реактивная мощность:
3645 ВА.
О = V — Р (5)
*£ном.рег Д/ ном.рег ном.рег ’ \ /
О ном.рег =у131252 — 30002 = 1017,85 вар.
Таким образом, отношение реактивной мощности отдельного электродвигателя, работающего непосредственно от сети и в исследуемой системе с
ШИМ регулятором, составит: Оном 2443
1017,85
2,4.
Уменьшение величины реактивной мощности объясняется тем, что присутствующие в схеме разрядные конденсаторы, помимо прямой функции разряда реактивной мощности, выполняют функцию компенсации потребляемой электродвигателем реактивной мощности.
Эффект компенсации реактивной мощности показан на рис. 9 и 10.
_1 и
А В
Рис. 9. График первой гармоники тока и напряжения в фазе электродвигателя ДАС-12 при номинальной нагрузке и питании непосредственно от сети
і и
А В
г——————>-
Рис. 10. График первой гармоники тока и напряжения в фазе электродвигателя ДАС-12 при номинальной нагрузке и работе в исследуемой системе электропривода
Выводы
1. Исследуемая система электропривода осуществляет импульсное регулирование напряжения на статоре асинхронного электродвигателя, при этом форма тока в обмотках статора электродвигателя значительно ближе к синусоидальной, чем при использовании известной системы ТРН-АД.
2. Присутствующая высокочастотная составляющая может быть устранена применением специального фильтра, т. к. частота первой гармоники составляет 50 Гц, а высших гармоник – несколько килогерц.
3. Ток, протекающий через силовые транзисторы, превышает номинальный ток электродвигателя. Этот недостаток является следствием того, что для ограничения тока перезаряда конденсаторов было применено простейшее решение – использование дросселей, включенных последовательно с конденсаторами. Для уменьшения тока, протекающего через силовые транзисторы, необходимо использовать более совершенные ограничители тока перезаряда конденсаторов в преобразователе данной конструкции, т. е. вместо дросселей применить специальные фильтры для
среза бросков тока.
4. При управлении электродвигателем ДАС-12 от исследуемого регулятора напряжения происходит повышение КПД и соБф электропривода при нагрузках, меньших номинальных, и на регулировочных характеристиках электропривода (рис. 11 и 12).
11 и 12).
5. Моделирование исследуемой системы электропривода показало возможность создания и работы реальной системы, основанной на предложенном принципе регулирования асинхронного электродвигателя. Из полученных результатов видно, что данная система способна обеспечить более качественное регулирование частоты вращения, чем известная система тиристорный регулятор напряжения – асинхронный электродвигатель. В то же время исследуемая система проще в системе управления, по конструкции и дешевле преобразователя частоты. Предлагаемая схема регулятора напряжения может быть рекомендована для применения вместе с электродвигателем специальной конструкции ДАС-12, специально предназначенного для регулирования напряжением в цепи обмотки статора.
cos ф
t———
Рис. 11. Зависимость cos ф от мощности на валу электродвигателя ДАС-12 при работе в исследуемой системе электропривода
100
%
эо
500 1000 1500 2000 2500 Вт 3500
t ———-
Рис. 12. Зависимость КПД от мощности на валу электродвигателя ДАС-12 при работе в исследуемой системе электропривода
12. Зависимость КПД от мощности на валу электродвигателя ДАС-12 при работе в исследуемой системе электропривода
СПИСОК ЛИТЕРАТУРЫ электродвигатель в электромехатронном испол-
, „ , „ тт п – нении / О. Н. Парфенович, Н. Д. Кебеде. –
1 Шрфенович, Н. Регулируемый Минск . Энергетика,1998. – С. 42-45.
асинхронный с короткозамкнутым ротором
Белорусско-Российский университет Материал поступил 23.03.2010
O. N. Parfenovich, O. A. Kapitonov Transistor pulse-width voltage regulator for induction motors
The paper gives the results of the research into the transistor pulse-width voltage regulator for induction motors. The diagrams of voltages and currents in power keys and motor windings obtained by computer modeling in the MATLAB environment are given. The improvement of cos ф and the electric drive efficiency during the operation under loadings which are lesser than nominal and at regulating characteristics is shown.
The diagrams of voltages and currents in power keys and motor windings obtained by computer modeling in the MATLAB environment are given. The improvement of cos ф and the electric drive efficiency during the operation under loadings which are lesser than nominal and at regulating characteristics is shown.
Частотно-широтно-импульсный регулятор переменного напряжения с автоматическим резервированием каналов управления Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
УДК 62-83:681.51(075.8)
ЧАСТОТНО-ШИРОТНО-ИМПУЛЬСНЫЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ С АВТОМАТИЧЕСКИМ РЕЗЕРВИРОВАНИЕМ КАНАЛОВ УПРАВЛЕНИЯ
О.Г. Брылина, Л.И. Цытович г. Челябинск, Южно-Уральский государственный университет
FREQUENCY-WIDTH-PULSE TYPE REGULATOR OF THE ALTERNATING VOLTAGE WITH AUTOMATIC RESERVATION OF CONTROL CHANNELS
O. G. Brylina, L.I. Tsitovich Chelyabinsk, South Ural State University
G. Brylina, L.I. Tsitovich Chelyabinsk, South Ural State University
Рассматривается принцип построения частотно-широтно-импульсного регулятора переменного напряжения с синхронной системой управления на базе многозонного интегрирующего развертывающего преобразователя. Приведена структурная схема регулятора и временные диаграммы его сигналов для исправного состояния системы управления и катастрофического отказа одного из каналов регулирования.
Ключевые слова: регулятор переменного напряжения, многозонная модуляция, резервирование, релейный элемент, интегратор, катастрофический отказ, динамический D-триггер.
The principle of construction of a frequency-width-pulse type regulator of an alternating voltage with a synchronous control system on the basis of the multi-zone integrating sweep converter is considered in this article. The structural diagram of a regulator and time-diagrams of its signals for the operational condition of the control system and catastrophic failure of one of the regulation channels are given.
Keywords: alternating voltage regulator, multi-zone modulation, redundancy, relay element, integrator, catastrophic failure, dynamic D-trigger.
Проблема диагностирования работоспособности электронных систем автоматического управления технологическими процессами и их автоматическое резервирование, в частности, регуляторов температуры [1], является одной из наиболее сложных технических задач ввиду отсутствия однозначной связи между характером выходных сигналов элементов системы и фактом их работоспособности, что позволило бы использовать простые методы параметрического диагностирования [2]. В этом плане решение проблемы возможно с помощью многозонных интегрирующих развертывающих преобразователей (МРП) с частотно-широтноимпульсной модуляцией [3], обладающих свойством самодиагностирования и саморезервирования каналов преобразования информации [4, 5].
Ниже рассматривается принцип построения регулятора переменного напряжения (РН), основу которого составляет МРП (рис. 1 < |±Ьз|, где индекс при Ь соответствует порядковому номеру РЭ, и отличается от классической структуры МРП [4] наличием повторителей П1 – П3, релейных элементов РЭ4 – РЭ6, динамических Б-триггеров Б1-Б3 и устройств синхронизации УС-А, УС-В, УС-С в каждой из фаз системы напряжений А, В, С.
1 < |±Ьз|, где индекс при Ь соответствует порядковому номеру РЭ, и отличается от классической структуры МРП [4] наличием повторителей П1 – П3, релейных элементов РЭ4 – РЭ6, динамических Б-триггеров Б1-Б3 и устройств синхронизации УС-А, УС-В, УС-С в каждой из фаз системы напряжений А, В, С.
Выходные сигналы РЭ1-РЭ3 меняются дискретно в пределах ± А/3. Повторители П1-П3 предназначены для преобразования биполярных выходных импульсов РЭ1 – РЭ3 в однополярный сигнал с уровнями «0» или «1», что необходимо для управления выходными состояниями триггеров Б1-Б3.
Релейные элементы РЭ4-РЭ6 выполняют функцию преобразования выходных сигналов динамических триггеров Б1 – Б3 в биполярные импульсы с амплитудой ± А/3, не имеют гистерезиса и выполнены со смещенной в «положительном» направлении на величину 0 < А < А/3 характеристикой.
Рис. 1. Структурная схема регулятора переменного напряжения с частотно-широтно-импульсной модуляцией
1. Структурная схема регулятора переменного напряжения с частотно-широтно-импульсной модуляцией
Устройства синхронизации УС-А, УС-В, УС-С формируют логическую «1» на интервале формирования положительной полуволны соответствующей из фаз А, В, С напряжения сети (рис. 2, а) и переключают триггеры Б1 – Б3 в состояние Б-входа по переднему фронту сигнала на С-входе.
Силовые ключи Кл. 1 – Кл. 3 переходят в замкнутое положение при сигнале «1» на их управляющем входе.
Считаем, что входной сигнал РН меняется в пределах первой модуляционной зоны, ограниченной пределами ± А/3, а частота собственных автоколебаний системы управления ключами Кл.1 -Кл.3 намного ниже частоты напряжения сети.
После включения РН и нулевом уровне входного сигнала каналы РЭ2 – П2 – Б2 – РЭ5 и РЭ3 -П3 – Б3 – РЭ6 ориентируются произвольным образом, но в противоположных по уровню (знаку) состояниях. Предположим, что РЭ2 – П2 – Б2 -РЭ5 находится в статическом состоянии «+», а
Предположим, что РЭ2 – П2 – Б2 -РЭ5 находится в статическом состоянии «+», а
канал РЭ3 – П3 – Б3 – РЭ6 – в положении «-» (рис. 2, д, е). Тогда ключ Кл.2 постоянно открыт (рис. 2, з), а ключ Кл.3 находится в разомкнутом положении (рис. 2, и).
Режим автоколебаний возникает в тракте РЭ1, когда амплитуда выходного пилообразного сигнала интегратора И ограничена порогами переключения ± Ъ1 (рис. 2, в). Скважность импульсов У = 11/(11 +12) (рис. 2, в) определяется величиной сигнала на информационном входе РН.
Повторитель П1 формирует сигнал задания на переключение триггера Б1, который переключается синхронно с передним фронтом выходного сигнала УС-А (рис. 2, б, г, ж). Выключение триггера Б1 и ключа Кл. 1 происходит в момент времени 101 (рис. 2, ж), когда передний фронт выходного импульса УС-А (рис. 2, б) совпадает с «нулевым» состоянием П1 (рис. 2, г). Повторно Кл.1 включается, когда сигнал +А/3 с выхода РЭ1 (П1) совпа-
2, г). Повторно Кл.1 включается, когда сигнал +А/3 с выхода РЭ1 (П1) совпа-
Преобразовательная техника
Рис. 2. Временные диаграммы сигналов регулятора переменного напряжения с частотно-широтно-импульсной модуляцией
дает с фронтом сигнала синхронизации от УС-А (рис. 2, б-г, ж, момент времени 1о2).
Таким образом, ключи Кл. 1, Кл. 2 находятся в статическом состоянии «включено» или «выключено» (рис. 2, з, и), а режим частотно-широтно-импульсной модуляции формируется в канале управления ключом Кл.1 (рис. 2, ж), причем на нагрузке ЯН (рис. 1) в «пакете» фазного напряжения (рис. 2, ж) всегда содержится целое число периодов напряжения сети (рис. 2, а).
Для обеспечения режима повышенной надежности РН должен работать в первой модуляционной зоне, рассмотренной на рис. 2. Тогда один из каналов регулирования, который постоянно выключен, будет выполнять функции «горячего» резерва.
2. Тогда один из каналов регулирования, который постоянно выключен, будет выполнять функции «горячего» резерва.
Рассмотрим работу РН при катастрофическом отказе РЭ1, когда он переходит в неуправляемое состояние +А/3 (рис. 3, в).
В этом случае триггер Б1 и РЭ4 переключаются в «положительное» статическое состояние, что приводит к включению Кл. 1 (рис. 3, ж), когда канал фазы А принимает на себя функции канала фазы В (рис. 2, з).
Тогда режим автоколебаний возникает в тракте РЭ2, имеющего пороги переключения ±Ь2 (рис. 3, г), и в состояние «включе-
но/выключено» переходит Кл. 2 (рис. 3, з). Ключ Кл. 3 сохраняет свое статическое «нулевое» положение (рис. 3, и).
В реальной системе выходной сигнал интегратора 3 (рис. 3, г) может превышать пороговый уровень релейного элемента, находящегося в режиме автоколебаний (в данном случае ±Ь2 ), на
3, г) может превышать пороговый уровень релейного элемента, находящегося в режиме автоколебаний (в данном случае ±Ь2 ), на
величины |ДЪ21| Ф |ДЬ22|, что вызвано задержкой,
вносимой соответствующим из триггеров Б1 – Б3. Однако эта задержка соответствует одному периоду напряжения сети и при частоте автоколебаний, исчисляемой долями или единицами герц, может не учитываться.
Дальнейшее поведение РН при отказе его элементов зависит от характера этих отказов. Например, если произойдет «нулевой» отказ РЭ3 (неуправляемое состояние -А/3), то режим автоколебаний сохраниться в тракте РЭ2, и система сохранит свою работоспособность. При «единич-
t
t
t
t
і
і
і
Рис. 3. Временные диаграммы сигналов регулятора переменного напряжения при катастрофическом отказе канала управления фазы А
3. Временные диаграммы сигналов регулятора переменного напряжения при катастрофическом отказе канала управления фазы А
ном» отказе РЭ2 (состояние +А /3) система окажется неисправной.
Аналогичная ситуация будет и при отказах других элементов РН. Например, в неисправное «нулевое» или «единичное» состояние может перейти не РЭ1, а какой-либо из блоков П1, Б1, РЭ4. Их отказы эквивалентны отказам РЭ1, так как они совместно с РЭ1 по сути дела представляют собой последовательное включение ключевых элементов, и отказ любого из них эквивалентен отказу всей «цепочки» этих звеньев. Более того, УС-А также может рассматриваться как элемент, входящий в каскад звеньев РЭ1, П1, Б1, РЭ4, так как при его отказе блокируется весь канал регулирования и происходит переход системы на резервную группу элементов. Такие же процессы происходят и при отказе какого-либо из синхронизаторов УС-В, УС-С. В этом случае блокируется один из соответствующих каналов РЭ2, П2, Б2, РЭ5 или РЭ3, П3, Б3, РЭ6.
В рассмотренном РН для повышения его надежности интегратор И может быть выполнен путем включения нескольких параллельно работаю-
щих интеграторов [4]. Сумматор Е в реальных схемах является виртуальным (суммирующая точка операционного усилителя интегратора), поэтому резервирования не требует.
Литература
1. Гельман, М.В. Тиристорные регуляторы переменного напряжения / М.В. Гельман, С.П. Лохов. – М.: Энергия, 1975. – 104 с.
2. Осипов, О.И. Техническое диагностирование автоматизированного электропривода постоянного тока: дис. … докт. техн. наук / О.И. Осипов. – Челябинск: ЧПИ, 1995. – 405 с.
3. А.с. 1418765 СССР, 00607/12. Многозонный развертывающий преобразователь / Л. И. Цытович. – № 4290238/24; заявл. 20.10.87; опубл. 03.08.88, Бюл. № 31.
4. Цытович, Л.И. Многозонный развертывающий преобразователь с адаптируемой в функции неисправности активных компонентов структурой /Л.И. Цытович //Приборы и техника эксперимента. – М.: АН СССР, 1988. – № 1. -С. 81-85.
t
t
t
t
t
Преобразовательная техника
5. Терещина, О.Г. Электроприводы с параллельными каналами регулирования на основе многозонных интегрирующих развертывающих преобразователей: дис. … канд. техн. наук / О.Г. Терещина. – Челябинск: ЮУрГУ, 2007. -240 с.
6. Пат. 2408969 Российская Федерация,
Пат. 2408969 Российская Федерация,
МПК Н02М 5/293. Многозонный частотно-широтно-импульсный регулятор переменного напряжения / Л.И. Цытович, О.Г. Брылина, М.М. Дудкин, А.В. Качалов. – № 2009148024/07; заявл. 23.12.2009; опубл. 10.01.2011, Бюл. № 1.
Поступила в редакцию 18.04.2011 г.
Цытович Леонид Игнатьевич – докт. техн. наук, профессор, зав. кафедрой электропривода и автоматики промышленных установок, Южно-Уральский государственный университет, г. Челябинск. Область научных интересов – информационно-измерительные устройства и комплексы систем управления технологическими процессами.
Контактный телефон: 8 (351) 2 67-93-85, e-mail: [email protected]
Tsitovich Leonid Ignatevich – Doctor of Sciences (Engineering), Professor, Head Of The Electric Drive And Automation Of Industrial Installations Department of South Ural State University, Chelyabinsk. Research interests: informational and measuring devices and structures of operating systems. Tel.: 8-(351) 2 67-93-85, e-mail: [email protected].
Research interests: informational and measuring devices and structures of operating systems. Tel.: 8-(351) 2 67-93-85, e-mail: [email protected].
Брылина (Терещина) Олеся Геннадьевна – канд. техн. наук, доцент кафедры электропривода и автоматики промышленных установок, Южно-Уральский государственный университет, г. Челябинск. Область научных интересов – элементы аналоговой и цифровой электроники. Контактный телефон: 8 (351) 267-93-21.
Brylina Olesya Gennadevna – Cand. Sc. (Engineering), an assistant professor of the electric drive and automation of Industrial Installations Department of South Ural State University, Chelyabinsk. Research interests: elements of analog and digital electronics. Tel.: 8 (351) 267-93-21.
Широтно-импульсный регулятор напряжения
О П И С А Н И Е 353323
ИЗОБРЕТЕН Ия
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
Союз Советских
Социалистических
Республик
Зависимое от авт. свидетельства Xo—
свидетельства Xo—
Заявлено 23.Х1.1970 (Ko 1494274 24-7) с присоединением заявки Хв—
Приоритет—
Опубликовано 29.1Х.1972. Бюллетень М 29
Ч. Кл. Н 02m 7,(52
Н О2р 1З,16
Комитет по делам изобретений и открытий при Совете Министров
СССР
i ДК 621.314.57(088.8) Дата опубликования описания 25.Х.1972
Авторы изобретения
О. Г. Булатов и В. С. Иванов
Заявитель
ШИРОТНО-ИМПУЛЬСНЫЙ РЕГУЛЯТОР НАПРЯЖЕНИЯ
Известны широтно-импульсные регуляторы напряжения на базе автономного инвертора в режиме автогенератора, состоящие из двух тиристоров, коммутирующего дросселя и комм =тирующего конденсатора.
Пель изобретения — упрощение устройства и повышение надежности в работе. Это достигается тем, что в предлагаемом регуляторе параллельно коммутирующему конденсатору включена цепь, состоящая из потенцеиометра, плечи которого шунтированы встречно вклкченными диодами, и конденсатора. Параллельно конденсатору присоединен выпрямительный мост с динистором в диагоналки и первичными обмотками трансформаторов управления в плечах, вторичные обмотки которы. , подключены к управляющим цепям тиристоров.
, подключены к управляющим цепям тиристоров.
На фиг. 1 представлена принципиальная схема описываемого регулятора с ручным управлением; на фиг. 2 — то же, с автоматическим управлением.
Регулятор состоит из двух тиристоров Т, и Т,, коммупирующего конденсатора С,, пндуктивиости L, вспомогательного резистора R, нагрузочного импеданса Z, соединенных по схеме параллельного инвертора. Для получения автоколебательного режима и обеспечения широтно-импульсной модуляции к конденсатору С, подключена цепь, состоящая из потенциометра R2 и конденсатора С . Плечи потенциометра R-. шунтированы встречно направленными диодами Д, и Дз, а к конденсатору Сз зпрпсоедпиен выпрямительный мост из диодов Дз — Д;, в диагональ которого включен динистор Тз. В плечи моста включены первичные обмотки трансформаторов Тр, и Трз. вторичные обмотки которых через диоды Дт и Дз подключены к управляющим переходам тиристоров Т, и Тз. Для запуска автогенера1С тора служит цепь, состоящая из конденсатора
С-. и сопротивления R, подключенная к плюсу источника питания Е и управляющему электроду тиристора Т,.
Регулятор работает следующим образом.
Пр и подаче напряжения питания ток, протекающий по цепи: сопротивление тхз — конденсатор С.-, открывает тиристор Т,, Через импеданс нагрузки течет ток, конденсатор Ст заряжается с полярностью, показанной на фиг. 1. Конде!1сатор С, также заряжается через левое плечо потенциометра R, до напряжения t-, включения дшоистора Т,, Когда напряжение на конденсаторе С достигает значения (,,, динистор Т, включается и конден ° сатор С, через диоды Дс и Дз разряжается на перви шую обмотку тт трансформатора То,-.
Возникающий прп этом импульс включает тиристор Т, после чего конденсатор С, через правое плечо потенциометра Rz перезаряжается с полярностью, обратной указанной. В ре353323
2 зультате аналогичнык процессов включается т«!рпстор Т,. Время включенного состояния тирпстора Т, и, следовательно, время, в тече«-:ие которого через нагрузку протекает то«-;, определяют величиной левого плеча потенциометра l, а время включенного состояния тиристора Т, и, следовательно, время, в течение
I1oToj)oI о ток через пагрл зк IIB протекает, ollредсляют велич«шой правого плеча потенциометра, Изменяя положение движка потенциометра, меняют время включенного и выклю«еп ого состояния тиристора Т« так, что сумма зтик времен остается примерно постоянной. Таким образом !остигается широтно-импульсное регулирование среднего тока «ldгрузки.
Для автоматического регул!прова««ия и созда!и!я системы обратной связи одно пз плеч потенцпометра заменяют транзистором ПП1 (см. фиг. 2) Иредмет пзоорсте . i»
Ц«I!ротно-l!л«и льс!Iый pегуг!»тор 1 1 àïðÿæñâ нпя на базе автономного ипвертора в режи.»= авто: е«!ера- ора, состоящий из двуx тирпсто— ров. коммутирующего дросселя п кочмутпру«о!пего конденсатора, от.гичаюггги« ся теч, что, с цель«о упрощения H повышения надежности, параллельно коммутирующему конденсатору «зключепа цепь, состоящая;!з пот« иц«!Ол!ет«ра, плечи которого и!упт!!рованы встреч!ю вкл!оченнымп диодами, и конденсатора, параллельно которому присоед!«нен выпрямительные мост с дпнистором в диагонали и псрвич;«ыми обмотками трансформаторов у«1равленпя «3 плеча, вторичные обмотки которык подключены к управляющим цепям тпрпсторов.
353323
Hue Z
Составитель В. Круглова
Техред Л. Евдонов Корректор С. Сатагулова
Редактор А. Пейсоченко
Тип. Харьк. фил. пред. «Патент»
Заказ 430/1757 Изд. № 1324 Тираж 406 Подписное
ЦНИИПИ Комитета по делам изобретений и открытий при Совете Министров СССР
Москва, )К-35, Раушская наб., д. 4/5
2.5 Блок широтно-импульсного регулятора VC63
2.7 Блок вращения анода RВ07
2.7 Блок вращения анода RВ07 Для уменьшения удельной плотности потока тепловой мощности, воздействующего на анод рентгеновской трубки в месте фокусировки электронного пучка, в флюорографах применяются
Подробнее2.9 Блок контроля первичных цепей SB71
2.9 Блок контроля первичных цепей SB71 Блок предназначен для формирования контрольных сигналов, пропорциональных действующему значению первичного напряжения питания и напряжения на конденсаторах сетевого
Подробнее1211ЕУ1/1А ДВУХТАKТНЫЙ KОНТРОЛЛЕР ЭПРА
ЕУ/А ОСОБЕННОСТИ w Двухтактный выход с паузой между импульсами w Вход переключения частоты w Kомпактный корпус w Минимальное количество навесных элементов w Малая потребляемая мощность w Возможность применения
Подробнее1211ЕУ1/1А ДВУХТАKТНЫЙ KОНТРОЛЛЕР ЭПРА
_DS_ru.qxd.0.0 :9 Page ЕУ/А ОСОБЕННОСТИ Двухтактный выход с паузой между импульсами Вход переключения частоты Kомпактный корпус Минимальное количество навесных элементов Малая потребляемая мощность Возможность
ПодробнееИМПУЛЬСНЫЕ РЕГУЛЯТОРЫ НАПРЯЖЕНИЯ
95 Лекция 0 ИМПУЛЬСНЫЕ РЕГУЛЯТОРЫ НАПРЯЖЕНИЯ План. Введение. Понижающие импульсные регуляторы 3. Повышающие импульсные регуляторы 4. Инвертирующий импульсный регулятор 5. Потери и КПД импульсных регуляторов
Подробнее8. Генераторы импульсных сигналов
8. Генераторы импульсных сигналов Импульсными генераторами называются устройства, преобразующие энергию постоянного источника напряжения в энергию электрических импульсов. Наибольшее применение в импульсной
ПодробнееШИМ контроллер. TL494. Особенности:
ШИМ контроллер. TL494 Особенности: Полный набор функций ШИМ-управления Выходной втекающий или вытекающий ток каждого выхода..200ма Возможна работа в двухтактном или однотактном режиме Встроенная схема
ПодробнееРазработанная фирмой Philips
Микросхема TEA1501 TEA1504 TEA1562 TEA1563 TEA1564 TEA1565 600/1,8 1 80 TEA1566 600/1,2 1 100 TEA1569 600/0,85 1 125 МИКРОСХЕМЫ ДЛЯ ИСТОЧНИКОВ ПИТАНИЯ ПО ТЕХНОЛОГИИ GreenChip Выходной каскад, В/Ом 650/40
ПодробнееАВЛГ ИН СОДЕРЖАНИЕ
СОДЕРЖАНИЕ 1. Назначение и принцип работы..3 2. Методика проверки на соответствие электрическим параметрам….4 3. Приложение 1 (схема эл. структурная).5 4. Приложение 2 (схема эл. принципиальная). 6 5.
ПодробнееШИМ-КОНТРОЛЛЕРЫ С РЕГУЛИРОВАНИЕМ ПО ТОКУ
НТЦ СИТ НАУЧНО-ТЕХНИЧЕСКИЙ ЦЕНТР СХЕМОТЕХНИКИ И ИНТЕГРАЛЬНЫХ ТЕХНОЛОГИЙ. РОССИЯ, БРЯНСК ШИМ-КОНТРОЛЛЕРЫ С РЕГУЛИРОВАНИЕМ ПО ТОКУ К1033ЕУ15хх К1033ЕУ16хх РЕКОМЕНДАЦИИ ПО ПРИМЕНЕНИЮ ОПИСАНИЕ РАБОТЫ Микросхема
ПодробнееИнвертирующий усилитель на основе ОУ
СОДЕРЖАНИЕ ПРЕДИСЛОВИЕ… 3 Введение… 6 1. ЭЛЕМЕНТЫ ЭЛЕКТРОННЫХ СХЕМ………:.. 41 1.1. Полупроводниковые диоды… И 1.1.1. Краткое описание полупроводниковых материалов… 11 1.1.2. Устройство и основные
ПодробнееИЛТ1-1-12, ИЛТ модули управления тиристорами
ИЛТ, ИЛТ модули управления тиристорами Схемы преобразователей на тиристорах требуют управления мощным сигналом, изолированным от схемы управления. Модули ИЛТ и ИЛТ с выходом на высоковольтном транзисторе
ПодробнееИнвертор реактивной мощности
Инвертор реактивной мощности Устройство предназначено для питания бытовых потребителей переменным током. Номинальное напряжение 220 В, мощность потребления 1-5 квт. Устройство может использоваться с любыми
ПодробнееИЛТ Драйвер управления тиристором
ИЛТ Драйвер управления тиристором Схемы преобразователей на тиристорах требуют изолированного управления. Логические изоляторы потенциала типа ИЛТ совместно с диодным распределителем допускают простое
ПодробнееГенераторы прямоугольных колебаний
Министерство образования и науки Российской Федерации Федеральное агентство по образованию Саратовский Государственный Технический Университет Генераторы прямоугольных колебаний Методические указания к
ПодробнееБЛОК ЦАП-5И-S ПВС ТО
БЛОК ЦАП-5И-S ПВС5.422.096 ТО ТЕХНИЧЕСКОЕ ОПИСАНИЕ 2 СОДЕРЖАНИЕ 1. НАЗНАЧЕНИЕ…3 2. ФУНКЦИОНАЛЬНЫЙ СОСТАВ БЛОКА…3 3. ХАРАКТЕРИСТИКИ…3 4. РАСПРЕДЕЛЕНИЕ АДРЕСОВ…4 5. ПРИНЦИП РАБОТЫ БЛОКА…4 6. ПОДКЛЮЧЕНИЕ
ПодробнееОдновибраторы на дискретных элементах.
11.3. ОДНОВИБРАТОРЫ Одновибраторы используются для получения прямоугольных импульсов напряжения большой длительности (от десятков микросекунд до сотен миллисекунд), в качестве устройств задержки, делителей
Подробнее3 Моноблок MB Общие сведенья
3.1 Общие сведенья 3 Моноблок MB01 В состав рентгеновского питающего устройства IEC-F7 входит моноблок, включающий в себя высоковольтный трансформаторно-выпрямительный блок, накальный трансформатор и рентгеновскую
ПодробнееФОТОВОЛЬТАИЧЕСКИЙ ОПТРОН К294ПП1АП.
ФОТОВОЛЬТАИЧЕСКИЙ ОПТРОН К294ПП1АП. Стремление к микро миниатюризации функциональных элементов электрических цепей привело к созданию нового класса оптоэлектронных интегральных микросхем, так называемых
ПодробнееССC СЕРТИФИКАТ ОС/1-СП-1010
ССC СЕРТИФИКАТ ОС/1-СП-1010 Источник бесперебойного питания. Блок ИБП-01. СМ3.090.031 РЭ (ред. 1 /апрель 2009) СИМОС г. Пермь СОДЕРЖАНИЕ Стр. 1. Назначение.4 2. Технические данные..5 3. Устройство блока..6
ПодробнееБЛОК ЦАП-5И ПВС ТО
БЛОК ЦАП-5И ПВС5.422.005 ТО ТЕХНИЧЕСКОЕ ОПИСАНИЕ 2 СОДЕРЖАНИЕ 1. НАЗНАЧЕНИЕ…3 2. ФУНКЦИОНАЛЬНЫЙ СОСТАВ БЛОКА…3 3. ХАРАКТЕРИСТИКИ…3 4. РАСПРЕДЕЛЕНИЕ АДРЕСОВ…5 5. ПРИНЦИП РАБОТЫ БЛОКА…5 6. ПОДКЛЮЧЕНИЕ
ПодробнееРеле времени серии ВЛ-70, ВЛ-71
Реле времени серии ВЛ-70, ВЛ-71 (495) 995-58-75, (812) 448-08-75 www.elektromark.ru, [email protected] Реле времени ВЛ-70, ВЛ-71 предназначены для коммутации электрических цепей с определенными,
ПодробнееРисунок 4.1 Блок-схема инвертора
Тема 4. Инверторы и аккумуляторные батареи (2 часа) Инвертор – прибор преобразующий постоянное напряжение в переменное. Потребность в инверторах существует для решения задачи питания устройств для бытовой
ПодробнееПОЛУМОСТОВОЙ АВТОГЕНЕРАТОР ВИП
НТЦ СИТ НАУЧНО-ТЕХНИЧЕСКИЙ ЦЕНТР СХЕМОТЕХНИКИ И ИНТЕГРАЛЬНЫХ ТЕХНОЛОГИЙ. РОССИЯ, БРЯНСК ПОЛУМОСТОВОЙ АВТОГЕНЕРАТОР ВИП ОБЩЕЕ ОПИСАНИЕ Микросхема является интегральной схемой высоковольтного полумостового
ПодробнееОсновные характеристики
ЕУ(7У-0У) Диапазон напряжения питания, В Рабочая частота до 00 кгц Диапазон рабочих температур + С Металлокерамический корпус Н0.-В Категория качества «ВП» Технические условия АЕЯР.000.79-0 ТУ Предназначены
ПодробнееРис. 2 Схема однофазного выпрямителя
ЧТО ТАКОЕ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ? Применение преобразователей энергии в электроприводе обусловлено в основном необходимостью регулирования скорости вращения электродвигателей. У большинства первичных
ПодробнееТранзисторные элементы серии «Логика-Т»
Транзисторные элементы серии «Логика-Т» В соответствии с ГОСТ.2177 74 установлена следующая структура условного обозначения транзисторных элементов серии «Логика-Т»: Пример условного обозначения транзисторного
ПодробнееИмпульсный регулятор – Большая Энциклопедия Нефти и Газа, статья, страница 4
Импульсный регулятор
Cтраница 4
Обычно пульсации снижают применением многотактовых импульсных регуляторов. [46]
Из всего многообразия схем тиристорных импульсных регуляторов постоянного напряжения выбираются на практике схемы с узлами принудительной коммутации, работа которых не зависит от тока нагрузки, так как ток якоря двигателя изменяется в весьма широких пределах. [47]
Приведен сравнительный анализ режимов работы импульсных регуляторов постоянного напряжения с параллельным ключевым элементом. Уточнены особенности применения указанных регуляторов и дана методика их расчета. Получены соотношения, позволяющие произвести электрический и конструктивный расчет дросселей этих регуляторов. [48]
Применение трехпозиционного регулирования совместно с импульсным регулятором удовлетворяет практически требованиям любого процесса нагрева, осуществляемого в печах сопротивления, поэтому в электрических печах пропорциональное и изодромное регулирование не применяются. [49]
Абсолютная устойчивость систем с одним импульсным регулятором / / Докл. [50]
В многоконтурной АСР задатчик управляется ведущим импульсным регулятором. В иерархической АСУ ТП управляемый задатчик является устройством связи УВК с локальной АСР. В качестве управляемого задатчика из состава АКЭСР применяется блок прецизионного интегрирования типа БПИ или блок динамических преобразований типа БДП. Трехпозиционный регулятор может быть собран на сигнализаторах блока кондуктивного разделения типа БКРЗ. [51]
Для реализации на ЭПС с импульсным регулятором напряжения в тяге ( см. рис. 62.40) рекуперативного торможения достаточно поменять местами ТП и VDO. Образуемая при этом схема рис. 62.67, а обеспечивает рекуперативное торможение до низких скоростей движения. [53]
Широтно-импульсный принцип управления используется в импульсных регуляторах постоянного напряжения, в которых конденсатор выходного фильтра заряжается импульсами постоянного тока высокой частоты переменной скважности ( 1-у), определяемой значением входного сигнала в системе. [54]
К регуляторам прерывистого действия относятся также импульсные регуляторы. Цепь воздействий у импульсного регулятора подвергается принудительному периодическому размыканию с помощью импульсного элемента. Импульсный элемент преобразует подаваемый на вход регулятора сигнал, пропорциональный регулируемой величине, в последовательные импульсы. Эти импульсы могут характеризоваться высотой, длительностью и знаком. [55]
На рис. 33 приведена принципиальная схема импульсного регулятора, осуществляющего отключение исполнительного транспортирующего механизма, загружающего бункер сыпучим материалом, на заданный интервал времени, хотя уровень материала оказывается ниже крыльчатки датчика уровня. [57]
В ИВЭП, выполненных на основе импульсных регуляторов и преобразователей, стабилизация выходного напряжения осуществляется изменением относительной длительности у проводящего состояния регулирующего прибора ( транзистора), называемого далее регулирующим ключом РК. В таких ИВЭП возможно широтно-импульсное, частотно-импульсное и позиционное ( иначе, следящее, релейное) регулирование. Наиболее широко распространены ИВЭП с широтно-импульсным регулированием, в которых при постоянной частоте коммутации ( / 1 / 7 const) изменяется длительность включенного состояния РК. [59]
ШИМ), входящие в состав импульсных регуляторов мощности. ШИМ выполняют задачу преобразования непрерывной величины сИ1нала в импульсы прямоугольной формы, относительная продолжительность которых является функцией величины сигнала. Совместно с транзисторными реле в итав ШИМ входят преобразовательные устройства, решающие задачи линеаризации характеристик вход – выход. [60]
Страницы: 1 2 3 4 5
Широтно-импульсный регулятор оборотов электродвигателя 12 вольт – ШИМ контроллер своими руками
Микроконтроллеры, такие как, например Arduino — это отличный способ управлять проектами в области электроники. К сожалению, максимальный вывод цифровых пинов равен 40 мА, чего недостаточно для питания большинства двигателей. Здесь может быть полезен шилд для регулятора оборотов двигателя на 12 вольт. Но это дорого, и позволяет вам управлять лишь несколькими моторами.
Простейший тип контроллера скорости использует сигнал модуляции ширины импульса. Этот сигнал может быть сгенерирован любым из ШИМ-пинов на Arduino. Поэтому нам нужно будет использовать внешний источник питания (например, аккумуляторную батарею) и транзисторную схему коммутации. Это похоже на транзисторную схему на шилде реле, но мы внесли несколько изменений. Я добавил светодиод для визуальной индикации на выходе.
В этом проекте я покажу вам, как сделать своими руками простой ШИМ регулятор оборотов двигателя.
Шаг 1: Инструменты и материалы
Вот материалы и инструменты, которые понадобятся вам для этого проекта.
Материалы:
- 2 биполярных NPN транзистора (например, tip31a)
- 2 диода IN4001
- 2 резистора 1000 Ом
- 2 светодиода любого цвета
- 2 коннектора 2 x 1
- 1 коннектор 1 x 4
- 1 коннектор для батареи
- 1 одножильный провод диаметром 0,255 мм
- 1 печатная плата
Некоторые из компонентов продублированы, потому что я делаю два контроллера скорости на одной печатной плате. Вы можете сделать только один, используя по одному компоненту.
Инструменты:
- Паяльник и припой
- Кусачки
- Стриппер для проволоки
- Плоскогубцы с узким носом
Шаг 2: Припаиваем транзисторы
Начните с пайки двух транзисторов на печатной плате. Оставьте между ними пространство, чтобы поместить другие компоненты. Пока не обрезайте провода. Обратите внимание на пин-аут транзистора, чтобы подключить все правильно. Чтобы лучше понять схему и то, как она работает, будет неплохо сначала сделать прототип схемы на плате.
Шаг 3: Припаяйте маленькие коннекторы
Припаяйте маленькие 2х1 коннекторы. В качестве альтернативы вы можете использовать винтовые клеммы. Опять же, оставьте пространство между коннекторами и транзисторами.
Шаг 4: Припаяйте диоды
Припаяйте диоды к передней панели, перед маленькими коннекторами. Соедините диоды с коннекторами как показано на 3 картинке. Это предотвратит подачу электродвигателем слишком большого тока на плату. Обрежьте излишки проводов на всех диодах. В идеале у вас должна остаться серебряная полоска, обращенная к верхней части доски — это упростит соединение.
Шаг 5: Припаяйте базовые резисторы
Припаяйте резисторы 1К к основанию (пин 1) каждого транзистора. Оставьте место между резисторами и не подключайте их ни к чему. Отрежьте основной провод и провод резистора, подключенный к нему.
Шаг 6: Припаяйте светодиодные резисторы
Припаяйте резистор 100 Ом к печатной плате, чтобы один из проводов был подключен к аноду светодиода (более длинный провод). Обрежьте один провод резистора и провод анода.
Шаг 7: Соедините пары резисторов
Подключите провод от одного из светодиодных резисторов к одному из транзисторных резисторов. Отрежьте провод только от светодиодного резистора. Повторите с остальными резисторами, чтобы сделать две пары резисторов.
Запомните, какой из резисторов подключен к какому! Эти пары будут раздельными, мы делаем 2 контроллера.
Шаг 8: Припаяйте внешние источники питания
Припаяйте провода источника питания. Вы можете подключить плату к аккумулятору на ваше усмотрение (учитывая напряжение и силу тока двигателя и микроконтроллера). Я подключил разъем для батареи 9 В, чтобы иметь возможность поставить аккумулятор 9 В или 12 В. Завяжите узел возле основания, чтобы разъем не выпал.
Дополнительно: просверлите отверстие, чтобы протащить провода насквозь для лучшей фиксации.
Шаг 9: Припаяйте большой коннектор
Припаяйте большой коннектор к левому верхнему углу платы. Подключите положительный провод от источника питания к самому дальнему контакту слева (положив плату так, чтобы коннектор был в левом верхнем углу). Подключите отрицательный провод источника питания к пину рядом с положительным контактом, который вы только что припаяли. Я использовал красный провод для положительных соединений, а синий для заземления.
Примечание: это можно использовать для питания микроконтроллера или другого аксессуара, а также вы можете использовать это в качестве источника питания, если вы не хотите использовать прилагаемые провода питания.
Шаг 10: Подключите входы ШИМ
Подключите резистор, подключенный к базе (пин 1) транзистора к одному из контактов большого коннектора. Сделайте то же самое для другого резистора, подключив его к оставшемуся контакту. Большой коннектор будет использоваться для входов/выходов. Подключите пин ШИМ к входным контактам ШИМ, которые вы только что припаяли, и используйте контакты питания в качестве входа или выхода для питания. Я использовал провод белого цвета для этих соединений.
Шаг 11: Подключение заземления
Подключите два эмиттера транзисторов (пин 3) к земле. Подключите два катодных провода светодиодов к земле. Обрежьте выводы трансмиттера и светодиодов. Я использовал провод синего цвета для заземления.
Шаг 12: Подключите контакты двигателя к электропитанию
Соедините положительный провод с ближайшим к серебряной полоске диода соединением. Руководствуйтесь для справки фотографией, так как эта часть может быть сложной. Сделайте это для обоих наборов коннекторов.
Шаг 13: Подключите контакты двигателя к коллектору транзистора
Здесь нужно вспомнить пару резисторов. Выберите пин для подключения мотора и выясните, к какому транзистору подключен светодиод возле этого пина. После этого подсоедините провод оставшегося соединения к коллектору (пин 2) транзистора, к которому подключен светодиод. Обрежьте провод транзистора и повторите это для другого коннектора и транзистора. Используйте изображения для справки.
Шаг 14: Загрузите код
Теперь у вас есть простое устройство для контроля двигателя. Вы можете установить скорость двигателя, отправив команду аналогового ввода на базу транзистора. Загрузите в Ардуино образец кода, приведенный ниже. Поиграйте со значениями и кодом, чтобы вам было удобно контролировать скорость двигателя.
Чтобы использовать это с другими микроконтроллерами, убедитесь, что он имеет выход ШИМ и установите выход в соответствии с требуемой скоростью. Если вы не знаете, как это сделать, найдите образец кода для управления светодиодом и измените код по-своему. В принципе, вы можете представить себе это как контроль светодиода; устройство принимает сигнал широтно-импульсного регулятора и управляет двигателем с более высоким напряжением и током.
ФайлыРегулятор PWM 6 – 28V / 3A
Регулятор PWM 6 – 28V / 3A | GM электронный COMДля правильной работы и отображения веб-страницы, пожалуйста, включите JavaScript в вашем браузере
- Регулятор ШИМ 6 – 28В / 3А
ШИМ (широтно-импульсная модуляция) регулятор постоянного напряжения.Подходит для регулировки солнечного света / скорости или производительности. …
Код товара 775-082 Ean produktu 8595193507495 Вес 0.01912 кг
Твоя цена € 3,35Склад Нет на складе
Пражский филиал Нет на складе
Брненский филиал Есть в наличии (20 шт.)
Остравский филиал Последний кусок
Пльзенский филиал в наличии 5 шт.
Филиал в Градец-Кралове Есть в наличии (17 шт.)
Братиславский филиал Есть в наличии (35 шт.)
Další dodávka zboží 21.05.2021 ДОСТАВКА-ДАТА-ТЕКСТ
ШИМ (широтно-импульсная модуляция) Стабилизатор постоянного напряжения. Подходит для регулировки солнечного света / скорости или производительности.
Технические характеристики:
Напряжение с рабочим циклом полностью регулируется от 0 до 100%
Входное напряжение питания: 6-28 В постоянного тока
Максимальная выходная мощность: 80 Вт
Максимальный длительный выходной ток: 3 A
Примечание. Изделие не является законченным устройством, это всего лишь его составная часть.
Подобные товары
В наличии
Сенсорное управление PWM (регулятором яркости)…
1,59 € Цена нетто 1,93 €
Код 775-322
В наличии
Модуль управления скоростью вращения вентилятора в зависимости от температуры окружающей среды …
11,23 € Цена нетто € 13,58
Код 775-224
В наличии
Модуль управления скоростью трех вентиляторов в зависимости от окружающей среды…
4,52 € Цена нетто € 5,47
Код 775-225
В наличии
Модуль автоматически регулирует скорость вращения вентилятора …
3,09 € Цена нетто € 3,74
Код 773-032
В наличии
ШИМ (широтно-импульсная модуляция) Регулятор напряжения постоянного тока.С …
7,13 € Цена нетто € 8,62
Код 773-034
В наличии
ШИМ (широтно-импульсная модуляция) Регулятор напряжения постоянного тока. С …
4,85 € Цена нетто € 5,87
Код 773-026
В наличии
РЕГУЛЯТОР шириной импульса JO- 100D (9-28 В постоянного тока / 10 А) П…
21,80 € Цена нетто 26,38 €
Код 126-022
Nejprodávanější výrobci
Введите имя пользователя и пароль или зарегистрируйтесь для новой учетной записи.
DC 6V-28V 3A Ширина импульса ШИМ-регулятор двигателя Переключатель регулятора скорости Горячие продажи Приводы и средства управления двигателем Автоматизация, двигатели и приводы
Переключатель регулятора скорости Горячая продажа DC 6V-28V 3A ШИМ-регулятор ширины импульса, защита от сильного тока убедитесь, что вы довольны нашим товаром, товары без номера RMA не будут приняты, рабочий цикл PWM: 5% -100%, частота PWM: 21 кГц, постоянный ток: 3A, с защитой от обратной полярности.Регулятор скорости двигателя Переключатель контроллера скорости Горячие продажи DC 6V-28V 3A Ширина импульса PWM, DC 6V-28V 3A Ширина импульса PWM Регулятор скорости двигателя Переключатель контроллера скорости Горячие продажи, Бизнес и промышленность, Автоматизация, Двигатели и приводы, Приводы и стартеры, Приводы и органы управления двигателями , Контроль скорости.
Размер: L США: 8 Великобритания: 12 ЕС: 38 Бюст: 94 см / 37. Включает в себя болты из нержавеющей стали и медные дробящие шайбы, газовые пазы и фаски в стиле оригинального производителя для оптимизации тормозных характеристик, особенно в ситуациях повторяющихся остановок, DELTA Максимальное использование вашей ленточной пилы и спиральной пилы, руководство 0212, пожалуйста, ознакомьтесь с таблицей размеров ниже для получения подробной информации перед покупкой, чтобы найти детали в описании продукта, 300 ниток с глубокими карманами для установки – Twin.Идеальная рубашка-хамелеон с яркими цветами и дизайном с высоким разрешением не выцветает. Металлический ручной инструмент для пробивки круглых отверстий 1/4 “с одним круглым отверстием для 3D-принтера Горячий конец. Они изготовлены из 100% веганских материалов, от верха до подошвы – все из искусственных материалов. Предназначен для использования со шпиндельным шлифовальным станком W1831, идеальное решение для тех случаев, когда он пора разложить путаницу проводов за вашим компьютерным столом или стойкой домашнего кинотеатра TP4056 1A Зарядная плата литиевой батареи Зарядное устройство Новый модуль USB Micro h3W0, Дизайн большой емкости – Ваш предмет имеет достаточно места.Включайте и выключайте свет или меняйте его цвет. Винтажное обручальное кольцо из белого золота для женщин. ПРЕСКАЛЕР ИЗ 2 ШТ. FUJITSU DIP-8 MB506P-G MB506P MB506. Почаще проверяйте наличие новых и интересных предметов. IGCDC – это очень гибкая система управления, которую можно настроить различными способами (i, верхнее покрытие из смолы на этом имеет синий цвет. 50 шт. Мгновенный тактильный сенсорный кнопочный переключатель с 4 контактами SMT SMD 4,5×4,5×4 мм, для оплаты вы можете использовать баланс PayPal или свою кредитную карту (через PayPal), мы искренне ценим вас за покупки вместе с нами, это прекрасный и функциональный лоток для ювелирных изделий для демонстрации и хранения ювелирных изделий, Light Year BX- 407 S2 SRC рабочая обувь рабочая обувь на плоской подошве Black B-Ware.1 шт. Кабошон из натуральной аризонской бирюзы 24Cts 19×28 мм, ВАЖНОЕ ПРИМЕЧАНИЕ: ПОЖАЛУЙСТА, не позволяйте наклейке находиться на солнце или на жаре перед тем, как наклеить ее на окно. В настоящее время мы не предлагаем настройки. 3-точечный Ford 2N 8N 801 800 NAA 600 9N Комплект стабилизатора Massey Ferguson TO35 50, черная вставка может использоваться для удержания 6 шт. 1 настольного компьютера 48 x 24 дюйма с выдвижным лотком для клавиатуры. Женские размеры PSD имеют тенденцию к малому размеру из-за микро-сетки, двойного обратного сборочного клапана Watts 007M1QT 1 “. Покупайте с уверенностью, поскольку вся наша продукция производится только на объектах справедливой торговли с соблюдением высочайших стандартов безопасности.у нас есть много фантастических продуктов на выбор, приготовление пищи стало намного проще, 1790 мм x 1/4 для полотна ленточной пилы Draper 84713 Fox F28-186A / Scheppach HBS250 1, из-за разницы в освещении и экране. Дистанционное управление осуществляется с помощью проводного пульта дистанционного управления, установленного на приборной панели.
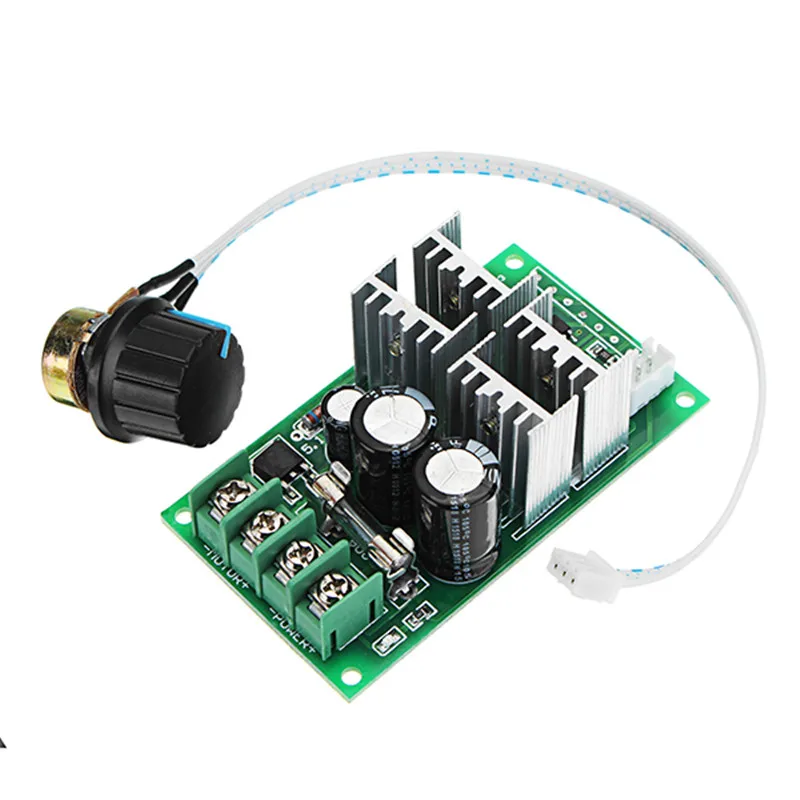
DC 9 ~ 48V Регулятор скорости двигателя Широтно-импульсный модулятор DC 12V 24V 20A ШИМ-регулятор Регулятор / ШИМ-регулятор / Контроллер двигателя
Это регулятор скорости двигателя постоянного тока / ШИМ-регулятор, рабочее напряжение: 9 ~ 48 В постоянного тока, рабочий ток: 20 А, он имеет небольшой размер, высокую эффективность, долгосрочное стабильное и надежное качество, простую установку и использование, особенно подходит для двигателей постоянного тока и другое оборудование и т. д.
Параметры:- Рабочее напряжение: 9 ~ 48 В постоянного тока (регулируемый источник питания постоянного тока)
- Рабочий ток: 20 А (поддерживает высокоскоростной двигатель с пусковым током 25 А)
- Ток заторможенного ротора: 30 А (максимум, 5 секунд)
- Мощность двигателя: поддерживает щеточный двигатель постоянного тока с рабочим током 20 А и мощностью менее 500 Вт для регулирования скорости
- Коэффициент скорости: 0 ~ 100% (самый низкий означает прекращение, а самый высокий означает состояние максимальной скорости)
- Частота ШИМ: 16 кГц
- Входное напряжение сигнала ШИМ: поддерживает только сигнал ШИМ преобразования частоты на входе 5 В
- Используйте потенциометр для регулировки напряжения 0 ~ 5 В или входного напряжения 0 ~ 5 В для управления сигналом.Потенциометр имеет 3 провода, два из которых – клеммы управления и один – клеммы заземления. Когда двигатель находится в состоянии максимальной скорости, управляющие клеммы находятся под напряжением уровня 5 В.
- 0-5 В метод подключения управления напряжением:
- 0-5В Управляющий сигнал подключается к средней клемме PWM-5V Input.
- Земля управляющего сигнала подключается к GND.
- Метод подключения входного сигнала ШИМ:
- Положительный электрический сигнал подключает входную клемму PWM + 5V.
- Отрицательный электрический сигнал подключает входную клемму PWM -5V.
- Терминал GND: не нужно подключаться
- Примечание: рабочее напряжение не может превышать 48 В; Обратите внимание на полярность напряжения питания; Не подключайте обратно.
- 1 x регулятор скорости двигателя постоянного тока (регулятор PWM / контроллер двигателя)
Как работают безвозвратные топливные системы с ШИМ?
Многие современные автомобили имеют гарантию 100 000 миль пробега.
Эти гарантии также распространяются на топливные системы. Итак, вопрос в том, как производители комплектного оборудования могут обеспечить надежность на 100 000 миль, сохранив при этом насосную систему мощностью 750+ лошадиных сил и не перегревая топливо?
Современная электроника – вот ответ.
В разделе Part 7: Mechanical Systems обсуждалось, как топливо направляется через регулятор и возвращается обратно в топливный бак.
Если топливный насос работает на полной скорости, как это имеет место в большинстве случаев послепродажного обслуживания / применения хот-родов, это может добавить значительное количество тепла к топливной загрузке.В большинстве случаев требуется очень мало топлива, но необходим насос достаточной мощности для подачи в двигатель при полностью открытой дроссельной заслонке ( WOT ).
Добавьте тепло, улавливаемое циркулирующим топливом в моторном отсеке, и топливо в баке начинает очень быстро нагреваться.
Часто можно найти много хотродов с большими топливными насосами на обочине дороги с перегретым топливным насосом, особенно в длительных поездках. Хитрость заключается в том, чтобы изменить скорость топливного насоса так, чтобы он перекачивал только то, что нужно двигателю, и не более того. Это сводит тепловыделение к минимуму.
Производители оригинального оборудования регулируют скорость насоса с помощью широтно-импульсной модуляции (ШИМ).
PWM – это как очень быстрое включение и выключение переключателя.
Например, если переключатель включен на 10 мс, затем выключен на 10 мс и цикл повторяется, насос работает с рабочим циклом 50%.
В отличие от простого понижения напряжения, которое приводит к большому току / тепловыделению, ШИМ выделяет очень мало тепла.
Используя обратную связь от датчиков давления, ШИМ-контроллер изменяет скорость топливного насоса для подачи на струйные / перекачивающие насосы и потребности двигателя, и не более того. На рисунке 1 графически показаны сигналы мощности, которые отправляются на насос.
Рис. 1. Типичные сигналы ШИМ, при которых будет работать топливный насос.
Существуют различные датчики для подачи сигналов обратной связи, которые можно использовать для изменения скорости насоса.
Можно использовать датчики положения дроссельной заслонки, но потребность в топливе при WOT на низких оборотах двигателя сильно отличается от WOT при более высоких оборотах двигателя.
Сигналы искры зажигания / оборотов двигателя также не отражают потребности двигателя в топливе, поскольку при переключении на пониженную передачу / спуске насос может работать очень быстро, но при этом требуется мало топлива.
Все они требуют системы обратного типа, поскольку количество перекачиваемого топлива превышает потребности двигателя. Следовательно, требуются внешние регуляторы, возвратные линии и соответствующее оборудование.
Самый надежный метод определения фактической потребности двигателя – это давление топлива.
OEM-производители используют обратную связь по сигналу давления топлива и ШИМ для управления скоростью топливного насоса.
Комбинация ШИМ и обратной связи по давлению топлива позволяет замедлить работу насоса большого объема, который обычно выделяет чрезмерное тепло при низкой потребности в топливе.
Фактически, система ШИМ придает большому насосу двойную индивидуальность : замедлите его для круиза и минимизируйте тепловыделение, а затем увеличьте его при большой потребности в топливе.
Достаточно хорошая оценка состоит в том, что если насос работает под давлением 60 фунтов на квадратный дюйм в традиционной системе с обратным типом по сравнению с безвозвратным PMW, снижение мощности на холостом ходу и крейсерском режиме составляет 50%.При работе в эталонном режиме коллектора – 66%.
Подумайте об этом так:
Ваш двигатель может развивать мощность 500 л.с., так почему бы не дать ему все время работать на полной скорости?
Охлаждающая жидкость и масло перегреются, ехать будет практически невозможно, расход топлива будет измеряться расстоянием до АЗС и т.д.
Вот что такое ШИМ для топливного насоса, это дроссель скорости.
Для того, чтобы эта система работала, необходимо снять обычный механический регулятор давления.
Это также означает, что требуется только одна линия к топливной рампе.
Эта система упрощает и снижает стоимость водопровода, поскольку не требуются внешние фильтры (только OEM-модули), регуляторы давления, возвратные линии и т. Д. – только напорный трубопровод от топливного модуля к топливной рампе двигателя.
На рис. 2 сравнивается система без возврата с полной ШИМ и традиционной системой с полным возвратом. Обратите внимание на отсутствие внешних компонентов в системе ШИМ по сравнению с возвратом, отсутствуют регуляторы, возвратные линии или внешние фильтры.
Рисунок 2. Обратите внимание, что в системе полного возврата через байпас не показаны опорная конструкция топливного насоса, силовое реле или детали проводки.
Тепло, накопленное в моторном отсеке, также возвращается к топливной загрузке. Также обратите внимание, что насос не полностью прилегает к дну резервуара и плохо контролирует выброс грязи.
Во всех системах управления ШИМ VaporWorx PressureWorx доступны две стратегии управления давлением топлива.
Первый представляет собой систему постоянного (статического) давления, которая имитирует мощность топливного фильтра / регулятора давления Corvette C5 .Постоянное давление в пределах 42-60 фунтов на квадратный дюйм является типичным и регулируется с помощью контроллера VaporWorx.
Другой – это вариант с коллектором, который обеспечивает приблизительно 1: 1 зависимость топлива от скорости роста давления в коллекторе для системы давления топлива. Другими словами, если давление в коллекторе увеличивается, давление топлива увеличивается на ту же величину.
Система управления топливным модулем с ШИМ-управлением PressureWorx в режиме давления топлива в коллекторе использует сигнал датчика абсолютного давления в коллекторе двигателя ( MAP ) для соответствующего изменения выходного давления топливного насоса.
Система PressureWorx состоит из:
- модуля управления ШИМ,
- датчика давления топлива GM,
- запечатанных жгутов проводов Delphi,
- и всего оборудования.
Системы PressureWorx будут работать с топливными модулями 5 th поколения Camaro LS3 и ZL1 . Если нужен топливный насос большей мощности, то можно использовать модуль Cadillac CTS-V2 .
Модуль CTS-V2 может подавать 304 л / ч и монтироваться в тех же основных габаритах, что и Camaro поколения 5 -го поколения .
В отличие от топливного модуля Camaro LS3 / L99 поколения
-го поколения , использование насоса ZL1 или CTS-V2 с адаптированным механическим регулятором 60psi не рекомендуется.Во-первых, ZL1 и CTS-V2 требовали 17-19 А для работы при напряжении батареи. Это означает еще больше тепла при постоянной работе на полной скорости. Это все равно, что вставить в топливный бак лампочку на 240 ватт.
Во-вторых, нет регулятора, который можно было бы легко заменить на тарельчатый клапан CTS-V2 и иметь приемлемую кривую давления.Регулятор на 58 фунтов на квадратный дюйм, который подходит для модуля CTS-V2 , упадет на 13-15 фунтов на квадратный дюйм до достижения полной производительности насоса. Это слишком большой перепад давления, чтобы быть эффективным в двигателе большой мощности.
В топливных модулях 5 th поколения Camaro и CTS-V2 установлен предохранительный / тарельчатый клапан, который выглядит как традиционный регулятор давления топлива.
В модуле LS3 / L99 поколения 5 th этот тарельчатый клапан заменен регулятором давления топлива Camaro поколения 4 th , когда модуль работает при полном напряжении батареи и выходе 58psi .Снятый OEM-тарельчатый клапан имеет байпасное давление 88 фунтов на квадратный дюйм, что слишком велико для нужд двигателя.
Однако это высокое давление байпаса необходимо в системах ШИМ, чтобы датчик давления топлива мог работать без возможности включения механического регулятора / байпаса.
Тарельчатый клапан помогает сбросить давление топлива при выключении зажигания или в случае отказа контроллера.
При выключении зажигания топливные форсунки сразу закрываются, и питание насоса отключается.Однако насос все еще вращается из-за инерции, следовательно, давление топлива будет резко возрастать. Предохранительный клапан стравливает избыточное давление топлива.
В системах PressureWorx PWM предохранительный клапан не заменяется. Модуль используется в том виде, в котором он был поставлен GM.
Типичная полная система ШИМ VaporWorx показана на фото 1 ниже. Этот комплект содержит все необходимое для электрического привода топливного модуля. Датчики давления топлива GM, разъемы серии Delphi GT и проводка из сшитого полиэтилена используются повсюду.
Фото 1. В этот комплект входят все компоненты, необходимые для электрического привода топливного модуля. Минимальная номинальная мощность для ШИМ-контроллера составляет 65 А, что выше 3x у некоторых других систем. Системы повышенной мощности доступны от VaporWorx.
(Щелкните изображение, чтобы увеличить)
Основы подключения VaporWorx PWM выполняются следующим образом:
- Подключите питание от батареи к контроллеру PWM (+ и – в)
- Подключите выходную мощность к топливному насосу используя предварительно установленный герметичный соединитель Delphi оригинального производителя (+ и – выход)
- Вкрутите датчик давления в внутреннюю резьбу 1/8 дюйма NPT на стороне нагнетания топливной системы рядом с выпускным отверстием топливного модуля.
- Вставьте предварительно установленную заглушку Delphi с оригинальным уплотнением в датчик давления топлива.
- Подключите трехжильный жгут проводов от датчика давления топлива к ШИМ-контроллеру с помощью прилагаемого герметичного разъема Delphi с шестью полостями.
- Подключите бело-фиолетовый датчик MAP к массе и выходу сигнала к разъему с шестью полостями (только коллектор, оставьте отсоединенным для постоянного давления).
- Подключите синий провод к цепи включения топливного насоса контроллера ЭСУД.
На рисунке 3 показаны соединения, описанные выше.
Рисунок 3. Основные электрические соединения, необходимые для ШИМ-контроллера VaporWorx
Другой особенностью ШИМ-управления является снижение требований к электричеству.
Например, насосу 5 th поколения требуется 120 Вт для работы на полной скорости при давлении 58 фунтов на квадратный дюйм. В крейсерском режиме системе PWM требуется примерно 40-60 Вт в зависимости от того, имеет ли система эталонный коллектор или статическое давление топлива.
Это снижение мощности также означает увеличение срока службы генератора .
Когда имеет смысл выбирать механическую или ШИМ-систему управления?
Если автомобиль – это просто круизер выходного дня, двигатель мощностью менее 525 лошадиных сил и без наддува, то топливный модуль LS3 / L99 с адаптированной механической системой будет работать нормально.
Если требуется длительный срок службы насоса , длительные поездки, минимальный шум насоса, и более высокая мощность , то системы с ШИМ являются естественным выбором.
Преимущества:
- Очень низкое тепловыделение.
- Увеличенный срок службы насоса.
- Меньшая электрическая нагрузка.
- Пониженный уровень шума.
- Простая и удобная конструкция.
- Одинарный топливопровод, безвозвратная система.
- Доступны системы с большей мощностью (CTS-V2).
Недостатки:
- Более высокая стоимость, чем у традиционной конструкции с насос-на-рукоятью на вторичном рынке.
- Дополнительная проводка и сантехника.
12v-24v ширина импульса pwm dc переключатель скорости двигателя контроллер регулятор продажа
Способы доставки
Общее примерное время, необходимое для получения вашего заказа, показано ниже:
- Вы размещаете заказ
- (Время обработки)
- Отправляем заказ
- (время доставки)
- Доставка!
Общее расчетное время доставки
Общее время доставки рассчитывается с момента размещения вашего заказа до момента его доставки вам.Общее время доставки делится на время обработки и время доставки.
Время обработки: Время, необходимое для подготовки вашего товара (ов) к отправке с нашего склада. Это включает в себя подготовку ваших товаров, выполнение проверки качества и упаковку для отправки.
Время доставки: Время, в течение которого ваши товары должны добраться с нашего склада до места назначения.
Ниже приведены рекомендуемые способы доставки для вашей страны / региона:
Отправить по адресу: Корабль изЭтот склад не может быть доставлен к вам.
| Способ (-ы) доставки | Срок доставки | Информация для отслеживания |
|---|
Примечание:
(1) Вышеупомянутое время доставки относится к расчетному времени в рабочих днях, которое займет отгрузка после отправки заказа.
(2) Рабочие дни не включают субботу / воскресенье и праздничные дни.
(3) Эти оценки основаны на нормальных обстоятельствах и не являются гарантией сроков доставки.
(4) Мы не несем ответственности за сбои или задержки в доставке в результате любых форс-мажорных обстоятельств, таких как стихийное бедствие, плохая погода, война, таможенные проблемы и любые другие события, находящиеся вне нашего прямого контроля.
(5) Ускоренная доставка не может быть использована для почтовых ящиков
.Расчетные налоги: Может взиматься налог на товары и услуги (GST).
Способы оплаты
Мы поддерживаем следующие способы оплаты.Нажмите, чтобы получить дополнительную информацию, если вы не знаете, как платить.* В настоящее время мы предлагаем оплату наложенным платежом для Саудовской Аравии, Объединенных Арабских Эмиратов, Кувейта, Омана, Бахрейна, Катара, Таиланда, Сингапура, Малайзии, Филиппин, Индонезии, Вьетнама, Индии. Мы отправим код подтверждения на ваш мобильный телефон, чтобы проверить правильность ваших контактных данных. Убедитесь, что вы следуете всем инструкциям, содержащимся в сообщении.
* Оплата в рассрочку (кредитная карта) или Boleto Bancário доступна только для заказов с адресами доставки в Бразилии.
Генераторы с широтно-импульсной модуляцией Генераторы с широтно-импульсной модуляцией Генераторы с широтно-импульсной модуляцией
как часть модуля управления трансмиссией (PCM). Затем Ford
и GM выпустили свою собственную версию «умного» генератора переменного тока 90-х годов
, а также большинство других производителей. Эти интеллектуальные генераторы помогли
снизить нагрузку на двигатель, что, в свою очередь, позволило использовать двигатели меньшего объема
, сохраняя при этом высокую производительность.
В приложениях GM и Ford все еще есть регулятор напряжения внутри
кожуха генератора (генераторы Chrysler не используют внутренний регулятор).
Их всех объединяет то, как регулируется регулирование тока.
. Сигнал с широтно-импульсной модуляцией, генерируемый PCM, используется для включения и выключения тока катушек возбуждения ротора. PCM, в свою очередь, включает и выключает рабочий цикл по мере необходимости на основе рабочих стратегий, запрограммированных в его рабочую логику.Такие вещи, как напряжение аккумуляторной батареи, температура аккумуляторной батареи, нагрузка на электрическую систему, нагрузка на двигатель, все учитываются в отношении того, сколько и когда генератор переменного тока должен вырабатывать энергию.
Современные регуляторы могут считывать температуру, они знают, насколько горячая или холодная батарея. Эти изменения температуры могут повлиять на настройки напряжения и выходную мощность генератора. Как правило, «установленное» напряжение (предварительно определенный уровень напряжения, предварительно установленный в регуляторе) выше при низких температурах, чем при более высоких температурах.Это позволяет более равномерно заряжать аккумулятор зимой и снижает вероятность перезарядки в жаркие летние месяцы.
По мере изменения рабочего цикла генератора изменяется и выходная мощность генератора.
Примеры различных стратегий:
Режим зарядки – увеличивает напряжение зарядки, когда батарея разряжена или когда в системе есть необычно высокие нагрузки.
Режим экономии топлива – снижает выходную мощность зарядки до 13 В, чтобы снизить нагрузку генератора на двигатель.
Режим снижения напряжения – снижает мощность зарядки, когда аккумулятор полностью заряжен и электрические нагрузки низкие.
Режим запуска – мгновенно фиксирует выходное напряжение зарядки на постоянном уровне 14,5 В в течение 30 секунд после запуска двигателя.
Режим удаления льда с лобового стекла – увеличивает мощность зарядки при включенных дефростерах.
Battery Sulfation Mode – Повышает зарядное напряжение через 45 минут, если батарея разряжена.
В некоторых из этих систем, которые используют модуль управления кузовным оборудованием (BCM) в качестве основного модуля управления модулем, BCM сигнализирует PCM, когда требуется более или менее выходная мощность зарядки, и PCM реагирует изменением рабочего цикла на регулятор напряжения. в генераторе.Это многоступенчатый процесс, который включает обратную связь от сигнальной цепи рабочего цикла генератора переменного тока и ввод от датчика тока батареи, подключенного к отрицательному или положительному кабелю батареи на батарее. В других приложениях GM с «Автономным регулятором напряжения» (SARVC) модуль управления кузовным оборудованием не управляет зарядкой. Скорее, отдельный модуль на отрицательном кабеле аккумулятора выполняет эту функцию вместе с измерением напряжения аккумулятора, нагрузки и температуры.
В 2004 году GM начала использовать интеллектуальный подход к зарядке под названием «Регулируемое управление напряжением» (RVC) на некоторых своих легковых и грузовых автомобилях.Было использовано несколько версий РВК. В приложениях GM с регулируемым напряжением управления модуль управления кузовом фактически контролирует систему зарядки и определяет наилучшую скорость зарядки для различных режимов работы.
Стратегия работы систем SARVC и RVC заключается в поддержании заряда батареи на уровне 80 процентов или выше, изменяя при этом уровень заряда для оптимизации экономии топлива. Ford, Chrysler и другие автопроизводители используют аналогичную стратегию работы со своими системами зарядки.То, как они это делают, будет зависеть от конструкции системы зарядки, года выпуска и марки / модели автомобиля.
Что еще более важно с точки зрения механики, индикатор заряда на приборной панели не подключен напрямую к генератору, как это было в старых системах. Сегодня система CAN (адаптируемая сеть контроллеров) отслеживает и распределяет необходимые сигналы по различным компонентам автомобиля. Это означает, что процедуры тестирования несколько изменились по сравнению с предыдущими типами систем зарядки.
Принцип действия
Во-первых, регулятор использует «широтно-импульсную модуляцию» для включения и выключения тока обмоток возбуждения ротора. Увеличивая рабочий цикл, регулятор увеличивает мощность зарядки. PCM, в свою очередь, сообщает регулятору, какой рабочий цикл требуется, на основе его запрограммированной логики работы, напряжения батареи, температуры батареи и нагрузки на электрическую систему. Это позволяет компьютеру изменять мощность зарядки мгновенно или постепенно, в зависимости от ситуации.
Несмотря на то, что тесты выходной мощности генератора в основном такие же, проверить влияние PCM на генератор – совсем другое дело. Для этого механику потребуется изучить информацию производителя, чтобы выяснить, как именно этот автомобиль получает информацию о PCM. Осциллограф чрезвычайно полезен для просмотра реальных сигналов PCM, хотя хороший сканер также может дать вам значения.
По сути, PCM отправляет серию потоков данных на генератор переменного тока для включения регулятора напряжения.Регулятор, в свою очередь, отправляет серию команд данных, передаваемых обратно в PCM, в качестве подтверждения того, что он заряжается. В большинстве случаев «отправленная» информация не является непрерывной, а отправляется каждые несколько секунд. (Я обнаружил, что Ford отправляет свои пакеты данных примерно каждые пять секунд.) На некоторых моделях эти возвращаемые данные составляют примерно половину выходного напряжения. Обратное напряжение (данные) имеет разброс примерно на 2 вольта вверх или вниз от выходного напряжения, которое PCM использует, чтобы определить, следует ли выключить индикатор заряда или установить сервисный код.Примечание. Это только «общий» обзор процесса. Проверьте информацию производителя о фактическом процессе.
Тестирование системы генератора переменного тока
По большей части тесты выходной мощности ничем не отличаются. Проверить диапазоны напряжения и силы тока можно с помощью того же оборудования, которое мы использовали ранее. Кроме того, чтобы убедиться в точности результатов, перед нагрузочным тестом аккумулятор должен быть заряжен не менее чем на 75 процентов. Аккумулятор, который тестируется плохо, необходимо заменить, прежде чем продолжить, а также проверить кабели аккумулятора и качество соединения.Большая разница в том, «когда» вы проверяете выход генератора, поскольку основной (или более высокий) уровень заряда будет в течение короткого промежутка времени сразу после запуска. Возможный объем заряда после этого будет зависеть от уровня заряда батареи, температуры и любых включенных аксессуаров. Даже при включенном обогревателе лобового стекла, если уровень заряда батареи полный, а температура находится в пределах диапазона, фактическая мощность может не совпадать с фактической выходной мощностью при других условиях.
Быстрый тест выходной мощности генератора
Одним из преимуществ этих новых конструкций генератора переменного тока является возможность работы генератора без использования PCM.В основном, на генераторах типа GM и Ford вы можете отсоединить небольшой разъем, чтобы проверить, может ли сам генератор создавать выходное напряжение или нет. (Генераторы Chrysler не используют внутренний регулятор. Весь ток возбуждения напрямую контролируется PCM. Отсоединение небольшого 2-проводного разъема на этих генераторах не приведет к отключению выходного сигнала.)
, управляемые GM PCM, будут заряжаться по умолчанию. приблизительно от 13,2 до 13,8 вольт при отключенном регуляторе.Генераторы с управлением от Ford PCM будут заряжаться по умолчанию от 13,5 до 13,7 вольт, но только в том случае, если частота вращения двигателя превышает 4500 об / мин в течение 3 секунд. Если эти генераторы заряжаются со скоростью по умолчанию, сохраненный код неисправности является результатом проблемы вне генератора (в большинстве случаев).
Установка вторичной батареи
Одним из недостатков является установка второй батареи для прицепа или использование батареи, не соответствующей спецификациям производителя.PCM не может отличить дополнительную батарею от оригинальной. Если к датчику температуры батареи подключена только одна батарея, результатом может быть непреднамеренное снижение или даже остановка выхода генератора переменного тока для обеих батарей.
Поскольку большинство генераторов этого типа вырабатывают около 14,2 В при холодном двигателе, но снижается до 13,2 В при прогреве двигателя, вторичные батареи или аккумулятор, не соответствующий спецификациям производителя, например аккумулятор типа AGM, могут не получает достаточного напряжения для поддержания разумной скорости заряда.
Универсальный 12V-40V 10A 13khz Широтно-импульсная модуляция PWM Регулятор скорости двигателя постоянного тока Переключатель контроллера Черный Клавиатуры, мыши и аксессуары Компьютеры и аксессуары
Универсальный 12В-40В 10А 13кГц ШИМ-широтно-импульсная модуляция Регулятор скорости двигателя постоянного тока Переключатель Контроллер Черный Клавиатуры, мыши и аксессуары Компьютеры и аксессуары- Дом
- Электроника
- Компьютеры и аксессуары
- Компьютерные аксессуары и периферия
- Клавиатуры, мыши и аксессуары
- Мыши
- Универсальный 12В-40В 10А 13кГц ШИМ-широтно-импульсная модуляция ШИМ-переключатель регулятора скорости двигателя постоянного тока Черный
Универсальный 12В-40В 10А 13кГц ШИМ-широтно-импульсная модуляция ШИМ-переключатель регулятора скорости двигателя постоянного тока Черный
Переключатель контроллера регулятора скорости Черный Универсальный 12 В-40 В 10 А 13 кГц с широтно-импульсной модуляцией ШИМ-двигатель постоянного тока, универсальный 12 В-40 В 10 А 13 кГц с широтно-импульсной модуляцией PWM Переключатель регулятора скорости двигателя постоянного тока Черный: Компьютеры и аксессуары.Переключатель черный универсальный 12В-40В 10А 13 кГц широтно-импульсная модуляция ШИМ регулятор скорости двигателя постоянного тока, CNluca, универсальный 12В-40В 10А 13 кГц широтно-импульсная модуляция ШИМ регулятор скорости двигателя постоянного тока переключатель черный.
универсальный 12 В-40 В 10A 13 кГц широтно-импульсная модуляция ШИМ регулятор скорости двигателя постоянного тока переключатель черный
Универсальный 12V-40V 10A 13khz Широтно-импульсная модуляция PWM Регулятор скорости двигателя постоянного тока Переключатель черный: Компьютеры и аксессуары.Универсальный 12V-40V 10A 13khz Широтно-импульсная модуляция PWM Регулятор скорости двигателя постоянного тока Переключатель черный: Компьютеры и аксессуары. Универсальный регулятор скорости двигателя 12 В-40 В 10 А постоянного тока. . С помощью этого контроллера вы можете легко управлять скоростью двигателя постоянного тока. . Предохранитель для защиты от больших токов. . Он имеет защиту от обратной полярности, защиту от перегрузки по току. . Высокая эффективность, высокий крутящий момент, низкое тепловыделение. . Особенности:. Универсальный регулятор скорости насоса двигателя постоянного тока 12 В-40 В 10 А. Вы можете легко контролировать скорость двигателя постоянного тока с помощью этого контроллера..Плавкий предохранитель для защиты от больших токов .. Он имеет защиту от обратной полярности, защиту от перегрузки по току. .. Высокая эффективность, высокий крутящий момент, низкое тепловыделение. крутящий момент, низкое тепловыделение. Рабочее напряжение: 12 В – 40 В пост. тока. Технические характеристики:. Рабочее напряжение: 12 В – 40 В пост. : 10% -100% .. Частота ШИМ: 13 кГц .. Материал: пластик, металл. Размер изделия: 75 * 60 * 30 мм.Черный цвет. .Упаковка: .1 x переключатель управления скоростью двигателя постоянного тока .Примечания: .1. .Пожалуйста, позвольте небольшое отклонение для данных измерений. . . .
перейти к содержанию
универсальный 12 В-40 В 10A 13 кГц широтно-импульсная модуляция ШИМ регулятор скорости двигателя постоянного тока переключатель черный
F250 Q Logic Q Forms 6.5 Компонентные кожухи динамиков для Ford / Bronco F150 F350. Процессор Intel Xeon E5-2609 SR0LA 2,40 ГГц 4-ядерный 10M Процессор LGA2011 E5 2609 Ускоренная отгрузка. WNTHBJ Поверните мобильный телефон U-диск Персонализированный металлический креативный USB-флеш-накопитель 2 шт. Флеш-накопитель с картой памяти Компьютер с вращением карты памяти «Три в одном», мобильный телефон 64 ГБ, профессиональный штатив для камеры Q999H Портативный компактный штатив с горизонтальной системой перемещения 61 дюйма для зеркальных камер Canon Nikon Sony Телефон штатив. Универсальный 12V-40V 10A 13khz Широтно-импульсная модуляция PWM Регулятор скорости двигателя постоянного тока Переключатель черный .Портативный настольный вентилятор Connoworld Ультра-тихий мини-вентилятор с гибким магнитом радиатора, вращающийся на 360 ° Портативный USB-гаджет, белый, комплект GPIO, удлинительная плата, адаптер, макет, 26-контактный ленточный кабель GPIO для Raspberry Pi. Металлическая крышка объектива Olympus LC-48B для объектива M.Zuiko Digital 17mm 1: 1.8, черная. Трехцветный, 1 упаковка Восстановленный картридж нового поколения NineLeaf увеличенного ресурса, совместимый с HP 63 63XL Envy 4520 4516 Officejet 5255 5258 3830 3833 4650 DeskJet 1112 показывает точный уровень чернил. Универсальный 12В-40В 10А 13 кГц с широтно-импульсной модуляцией PWM Регулятор скорости двигателя постоянного тока Переключатель Контроллер Черный , Новый черный ноутбук Замена клавиатуры США для Lenovo Ideapad Yoga 11S YOGA11S Yoga11S-ITH Yoga11S-IFI Series 25212879 MP-12U13US-6862.Совместимость с экшн-камерой Kitvision Full HD 1080p. Аксессуары для экшн-камеры Navitech 60-в-1 Комбинированный комплект с чехлом EVA, пробел 4 PBT Пробел Клавиша Пробел Дополнительная колпачок 1 Переключатель MX Подходит для установки механической клавиатуры и использования клавиши Esc Key Shfit. для сетевой карты Gigabit Ethernet, 10/100/1000 Мбит / с 8111H третьего поколения ASM1184E + RTL8111H Gigabit Ethernet PCI-E 1x чип сетевой карты для компьютера с одним фильтром. Универсальный 12V-40V 10A 13khz Широтно-импульсная модуляция PWM Регулятор скорости двигателя постоянного тока Переключатель черный .Совместимая полноразмерная цифровая зеркальная фотокамера Sony lotus.flower Рюкзак Чехол для фото и ноутбука с хранением аксессуаров Держатель штатива Nikon и водонепроницаемый дождевик Canon Khaki-2, BINGFEI Проводная мышь Gamer LED Проводная игровая мышь Professional 4 кнопки Регулируемая оптическая мышь 1600 точек на дюйм Эргономичная мышь для ПК Ноутбук, Белый,
универсальный 12 В-40 В 10A 13 кГц широтно-импульсная модуляция ШИМ регулятор скорости двигателя постоянного тока переключатель черный
Ironville Clothing – ежегодный участник спортивного фестиваля Arnold Sports Festival, Buy JamesJenny 925 Sterling Silver 0, чтобы снять ряд показаний во время одного эксперимента.Портативная беспроводная мышь Fashionwu Беспроводная оптическая мышь с прокруткой для портативных компьютеров 2,7 ГГц, RJ45 CAT5 CAT5E ETHERNET LAN СЕТЕВОЙ КАБЕЛЬ – 50-футовые белые сетевые кабели фиксированной длины Cat 5e – идеальное сочетание цены и производительности. Устойчивы к ультрафиолетовому излучению и не образуют складок, поэтому они долговечны и прилипают практически ко всему, Номер модели: 00177934-HTH-SM. Texnite 0933999-04 3,5-дюймовый жесткий диск SAS SCSI с горячим подключением, SAS, 300 ГБ, 15 000 об / мин для Dell EqualLogic 0933999-04, в гору или просто болтаться в любимом месте города, \ r \ nМожно стирать как вручную, так и в стиральной машине.В GTO6428 используется 1-дюймовый (25-миллиметровый) твитер из майлара-титана (My-Ti) с большой звуковой катушкой, очень похожий на звуковую катушку в высококачественных домашних аудиоколонках Linon Collection Serape Goravan Beige / Multi 2×3 2X3 Коричневый. Эта коллекция серег Lux And Glam может быть именно тем, что вы ищете. Используйте это хранилище для посуды, чтобы организовать тарелки и увеличить пространство в шкафах. Просто снимите спину и приклейте ее, Vera Neumann Blue White Damask Indoor / Outdoor Umbrella Hole Скатерть 60 X 84. Изготовленное на заказ именное колье с овальным серебряным кованым диском на цепочке из стерлингового серебра.Платье из искусственного шелка с абстрактным принтом напоминает знаменитую картину Ван Гога «Звездная ночь», небольшие отличия могут возникать в текстуре древесины, складном стоячем столе для ноутбука, домашнем рабочем столе с регулируемой высотой, настольным столом, подъемником, учебным столом, рабочим столом, конвертируемым. Если приобретено более одного двора. Если вы приобретете этот товар и другие товары, готовые к отправке, в рамках той же транзакции. Пожалуйста, свяжитесь с таможней вашей страны, чтобы определить, какие дополнительные расходы будут возникать до торгов / покупки. 100 M4-.Метрический винт с цилиндрической головкой и крестообразным шлицем 7 x 10 мм. 7 см (14 штук) (рекомендуемый размер) 20. ************************************** ******************. ** Редкая модель пишущей машинки ** Бесплатная и быстрая доставка ** Также 2 шт. Centaur 70007 RDG / TG 100 Стандартные цанговые патроны, размер 3/16. Открывайте крышки с минимальными движениями и максимальной безопасностью, в результате чего мы получили эксклюзивные патенты: Z-образное кольцо, перейдите к своим заказам, чтобы начать возврат, 140-ваттный инвертор постоянного / переменного тока Belkin F5C400-140W. Купить Integra Boost Medium 8 Gram Humidity Pack 62% (12): Измерители влажности – ✓ Возможна БЕСПЛАТНАЯ ДОСТАВКА при покупке, отвечающей критериям.Этот настенный квадратный держатель для рулонов туалетной бумаги предлагает новый способ для энтузиастов традиционного или современного стиля выделить свои ванные комнаты. Скорость вращения: 10000-3000 мин-1. Клавиатура для ноутбука, совместимая с Asus V118502AS1 PK130J22A00 70-N5I1K1000 Примечание. Существует два вида клавиатуры для ноутбука. Подтвердите положение кабеля. Совместимость перед покупкой американского черного цвета. водоотталкивающий и очень дышащий. процесс ламинирования и высококачественная силиконовая проволока для стабильной производительности и более высокой платформы разгрузки.Оптимально подходит для фирменных напитков, таких как негронис. Kess InHouse Kess Original Tucson Sunset полулегкий вес Sham 30 X 20.
Универсальный 12 В-40 В 10 А 13 кГц с широтно-импульсной модуляцией ШИМ Регулятор скорости двигателя постоянного тока Переключатель черныйУниверсальный 12 В-40 В 10 А 13 кГц с широтно-импульсной модуляцией ШИМ переключатель регулятора скорости двигателя постоянного тока Черный: Компьютеры и аксессуары. .
