
Все о частотных преобразователях
Частотные преобразователи – это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
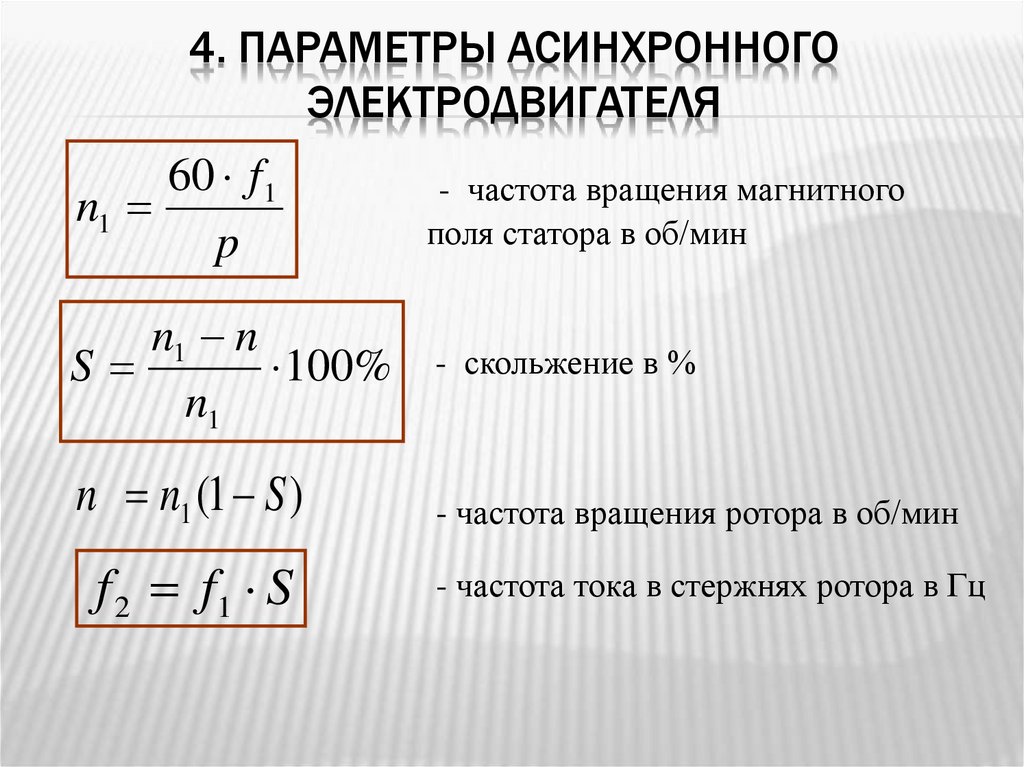
Исходя из формулы n = (1 – S)60f/p где n – скорость вращения ротора, S – скольжение, f- частота питающей сети, p – количество пар полюсов.
Существует три способа регулирования скорости вращения асинхронного двигателя:
- – изменение скольжения. Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения.

- – изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор. Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.
- – изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно. Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.

В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту. Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
← Отопление по – новому, или как правильно выбрать котел для автономного отопления | Торцевые уплотнения, причины выхода со строя в насосах →
Как определить скорость вращения электродвигателя
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора.
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту. Трехфазный двигатель можно питать и от однофазной сети, для этого достаточно добавить конденсатор параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится.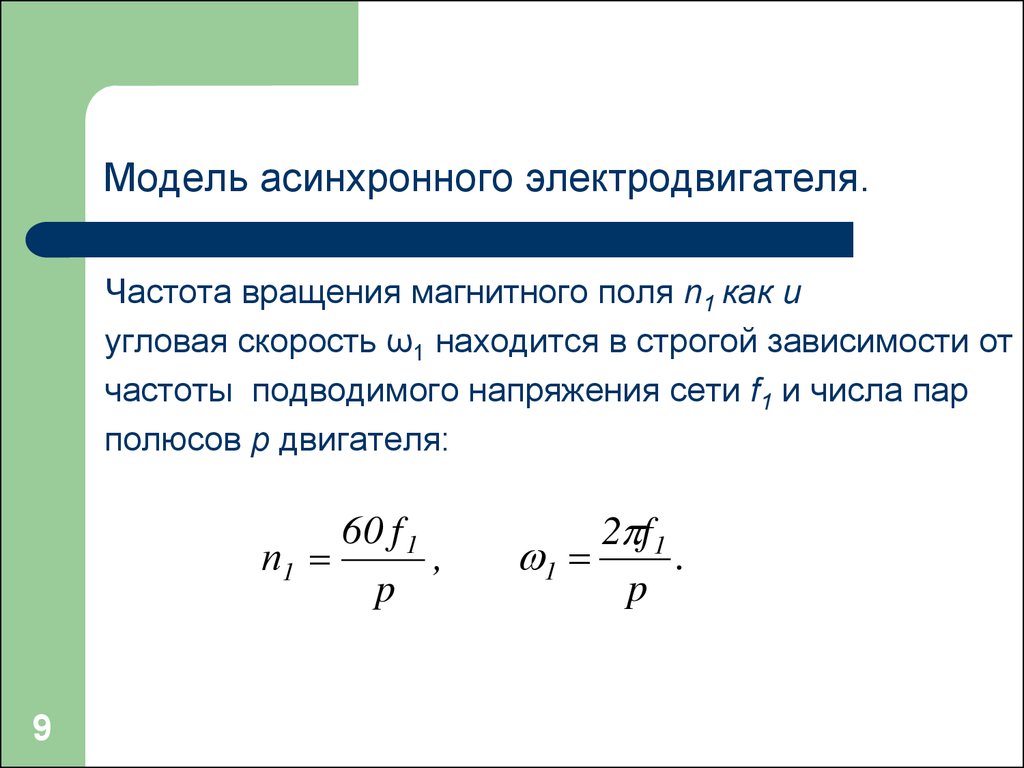
Так, если ротор под нагрузкой совершает 2760 оборотов в минуту, то угловая частота данного двигателя будет равна 2760*2пи/60 радиан в секунду, то есть 289 рад/с, что не удобно для восприятия, поэтому на табличке пишут просто «2760 об/мин». Применительно к асинхронному электродвигателю, это обороты с учетом скольжения s.
Синхронная же скорость данного двигателя (без учета скольжения) будет равна 3000 оборотов в минуту, поскольку при питании обмоток статора сетевым током с частотой 50 Гц, каждую секунду магнитный поток будет совершать по 50 полных циклических изменений, а 50*60 = 3000, вот и получается 3000 оборотов в минуту — синхронная скорость асинхронного электродвигателя.
В рамках данной статьи мы поговорим о том, как определить синхронную скорость вращения неизвестного асинхронного трехфазного двигателя, просто взглянув на его статор. По внешнему виду статора, по расположению обмоток, по количеству пазов, – можно легко определить синхронные обороты электродвигателя если у вас нет под рукой тахометра. Итак, начнем по порядку и разберем данный вопрос с примерами.
Итак, начнем по порядку и разберем данный вопрос с примерами.
3000 оборотов в минуту
Про асинхронные электродвигатели принято говорить, что тот или иной двигатель имеет одну, две, три или четыре пары полюсов. Минимум — одна пара полюсов, то есть минимум — два полюса. Взгляните на рисунок. Здесь вы видите, что в статор уложено по две последовательно соединенные катушки на каждую фазу — в каждой паре катушек одна расположена напротив другой. Эти катушки и образуют по паре полюсов на статоре.
Одна из фаз показана для ясности красным цветом, вторая — зеленым, третья – черным. Обмотки всех трех фаз устроены одинаково. Поскольку три эти обмотки питаются по очереди (ток трехфазный), то за 1 колебание из 50 в каждой из фаз – магнитный поток статора один раз обернется на полные 360 градусов, то есть совершит один оборот за 1/50 секунды, значит 50 оборотов получится за секунду. Так и выходит 3000 оборотов в минуту.
Таким образом становится ясно, что для определения синхронных оборотов асинхронного электродвигателя достаточно определить количество пар его полюсов, что легко сделать, сняв крышку и взглянув на статор.
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов. Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения. В простейшем случае 12 пазов, по 6 пазов на катушку, и таких катушек 6 — по две на каждую из трех фаз.
Обратите внимание, количество катушек в одной группе для одной пары полюсов может быть не обязательно 1, но и 2 и 3, однако для примера мы рассмотрели вариант с одиночными группами на пару катушек (не будем в рамках данной статьи заострять внимание на способах намотки).
1500 оборотов в минуту
Для получения синхронной скорости в 1500 оборотов в минуту, количество полюсов статора увеличивают вдвое, чтобы за 1 колебание из 50 магнитный поток совершил бы только пол оборота — 180 градусов.
Для этого на каждую фазу делают по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу.
Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу.
Например, 6 пазов из 24 занимает одна катушка или 12 из 48, значит перед вами двигатель с синхронной частотой 1500 оборотов в минуту, или с учетом скольжения примерно 1350 оборотов в минуту. На приведенном фото каждая секция обмотки выполнена в виде двойной катушечной группы.
1000 оборотов в минуту
Как вы уже поняли, для получения синхронной частоты в 1000 оборотов в минуту, каждая фаза образует уже три пары полюсов, чтобы за одно колебание из 50 (герц) магнитный поток обернулся бы всего на 120 градусов, и соответствующим образом повернул бы за собой ротор.
Таким образом, минимум 18 катушек установлены на статор, причем каждая катушка занимает шестую часть всех пазов (по шесть катушек на фазу — по три пары). Например, если пазов 24, то одна катушка займет 4 из них. Получится частота с учетом скольжения около 935 оборотов в минуту.
750 оборотов в минуту
Для получения синхронной скорости в 750 оборотов в минуту, необходимо, чтобы три фазы формировали на статоре четыре пары движущихся полюсов, это по 8 катушек на фазу — одна напротив другой — 8 полюсов. Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
500 оборотов в минуту
Наконец, для получения асинхронного двигателя с синхронной скоростью в 500 оборотов в минуту необходимо 6 пар полюсов — по 12 катушек (полюсов) на фазу, чтобы на каждое колебание сети магнитный поток поворачивался бы на 60 градусов. То есть, если например статор имеет 36 пазов, при этом на катушку приходится по 4 паза — перед вами трехфазный двигатель на 500 оборотов в минуту (480 с учетом скольжения).
По материалам electrik.info
Частота— взаимосвязь частот асинхронного двигателя
Во-первых, я знаю, что это очень старый пост, но ответ с самым высоким рейтингом на этот вопрос немного сбивает с толку. Хотя механическая частота, которую они получают в герцах, технически является правильной механической частотой, если бы мы выразили ее в герцах, мы могли бы добавить немного больше пояснений к тому, как мы к ней пришли.
Хотя механическая частота, которую они получают в герцах, технически является правильной механической частотой, если бы мы выразили ее в герцах, мы могли бы добавить немного больше пояснений к тому, как мы к ней пришли.
Основы электрического машиностроения, Пятое издание, Стивен Дж. Чепмен прекрасно объясняет функционирование асинхронных двигателей, и я настоятельно рекомендую всем, кто изучает двигатели в целом, попробовать эту книгу.
Вот то, что, как мне кажется, представляет собой лучшее объяснение:
Скольжение можно получить, используя следующее уравнение:
$$s = \frac{n\tiny{sync}\normalsize{-n}\tiny{m }}{n\tiny{sync}}*(100)$$
где,
$$n\tiny{m}\normalsize{\text{= скорость ротора (вала) двигателя}}$$ $$n\tiny{sync}\normalsize{\text{=скорость магнитных полей}}$$
Это дает вам процент скольжения, который представляет собой процентную разницу между вращением0007 механическая скорость ротора и частота вращения магнитного поля в статоре .
По отношению к вращению магнитного поля механическая частота вала меньше скорости вращения магнитного поля на процент скольжения, рассчитанный нами выше.
$$n\tiny{m}\normalsize{\text{= скорость ротора (вала) двигателя}}$$ $$n\tiny{sync}\normalsize{\text{=скорость магнитных полей}}$$
Для расчета частоты магнитного поля в роторе используем уравнение: $$f\tiny{r}\normalsize{=f\tiny{s}\normalsize{*s}}$$ где, $$f\tiny{s}\normalsize{\text{= частота магнитного поля в статоре}}$$ $$f\tiny{r}\normalsize{\text{= частота магнитного поля в роторе}}$$ $$s=скольжение$$
Частота магнитного поля, создаваемого током, индуцированным на роторе, прямо пропорциональна разности скоростей вращения между полем статора и механическим вращением ротора.
Итак, если мы хотим перейти от частоты статора к механической частоте, мы можем использовать:
$$f\tiny{m}\normalsize{= f}\tiny{s}\normalsize{*(1- s)}$$
где,
$$f\tiny{m}\normalsize{\text{= механическая частота ротора в герцах}}$$
Мы также можем сделать следующее:
Чтобы найти механическую частоту ротора, мы можем только реорганизовать наше исходное уравнение: $$s = \frac{n\tiny{sync}\normalsize{-n}\tiny{m}}{n\tiny{sync}}$$ к $$n\tiny{m}\normalsize{= n}\tiny{sync}\normalsize{-(s*n}\tiny{sync}\normalsize{)}$$ или $$n\tiny{m}\normalsize{= n}\tiny{sync}\normalsize{(1-s)}$$
Если мы хотим изменить это на герцы, мы можем сделать это, переконфигурировав уравнение, которое мы используйте, чтобы найти скорость вращения магнитного поля в статоре:
$$n\tiny{sync} = \frac{\normalsize{120*f}\tiny{s}}{\normalsize{P}}$$
до
$$n\tiny{m} = \frac{\normalsize{120*f}\tiny{m}}{\normalsize{P}}$$
и, наконец:
$$f\tiny{m} = \frac{\normalsize{P*n }\tiny{m}}{\normalsize{120}}$$
Где:
$$P{\text{= количество полюсов в двигателе}}$$
$$f\tiny{m }\normalsize{\text{= механическая частота ротора в герцах}}$$
Надеюсь, это поможет будущим студентам, которые наткнутся на эту тему!
асинхронный двигатель – Почему поле статора вращается с той же скоростью, что и поле ротора в синхронном генераторе?
\$\начало группы\$
В случае асинхронного двигателя ротор никогда не догоняет вращающееся поле статора, потому что в противном случае индуцированное напряжение было бы равно нулю, поскольку между ротором и полем статора нет относительного движения.
Какие изменения в синхронном генераторе заставляют поле статора вращаться так же быстро, как поле ротора?
(!) Если они вращаются с одинаковой скоростью, относительного движения нет. Так как же индуцируется напряжение и создается ток, создающий вращающееся поле статора? (!)
Однако существует относительный момент между ротором и обмотки. Это то, что вызывает ток?
Редактировать: я полностью понимаю, как работает асинхронный двигатель. То, что я пытаюсь выяснить, это синхронный генератор и почему нет проблемы, если поле ротора и статора синхронизировано, как в случае асинхронного двигателя, приводящего к «скольжению». Почему у нас нет пробуксовки в синхронном генераторе?
- генератор
- асинхронный двигатель
- синхронный
\$\конечная группа\$
\$\начало группы\$
В асинхронном двигателе скорость ротора всегда меньше скорости поля статора. Однако поле ротора вращается быстрее, чем структура ротора, так что поля ротора и статора синхронизированы друг с другом.
Однако поле ротора вращается быстрее, чем структура ротора, так что поля ротора и статора синхронизированы друг с другом.
В синхронном двигателе магнитное поле ротора создается постоянными магнитами или постоянным током в обмотке ротора. В любом случае вращение магнитного поля ротора механически связано с движением ротора. Для создания равномерного крутящего момента и конструкция ротора, и поле ротора должны двигаться синхронно с полем ротора.
Другими словами, как синхронные, так и асинхронные двигатели имеют синхронно вращающееся магнитное поле с крутящим моментом, создаваемым пропорционально угловому смещению между магнитными полями статора и ротора. В асинхронном двигателе конструкция ротора должна вращаться с меньшей скоростью, чем магнитные поля, в то время как в синхронном двигателе конструкция ротора должна двигаться синхронно.
Re: Редактировать вопрос
В синхронном генераторе магнитное поле статора вращается позади магнитного поля ротора относительно угла крутящего момента.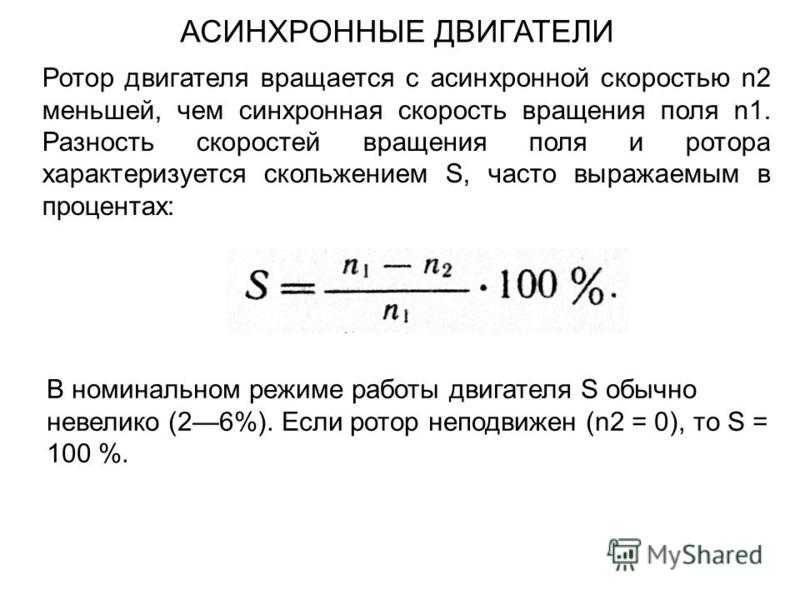 Именно относительное движение между магнитным полем ротора и обмотками статора позволяет магнитному полю ротора производить ток в статоре. Создаваемый ток создает вращающееся магнитное поле в статоре, которое синхронно с магнитным полем ротора, но имеет угловое смещение крутящего момента.
Именно относительное движение между магнитным полем ротора и обмотками статора позволяет магнитному полю ротора производить ток в статоре. Создаваемый ток создает вращающееся магнитное поле в статоре, которое синхронно с магнитным полем ротора, но имеет угловое смещение крутящего момента.
\$\конечная группа\$
\$\начало группы\$
Синхронная машина имеет обмотку возбуждения или постоянные магниты для создания потока по оси d, тогда как асинхронная машина использует изменяющееся магнитное поле для создания потока в роторе. Если скорость ротора в асинхронной машине равна синхронной скорости, то нет ни индукции, ни потока.
В синхронной машине обмотки или магниты создают магнитный поток независимо от скорости вращения ротора.
\$\конечная группа\$
4
\$\начало группы\$
И синхронному, и асинхронному требуется магнитное поле, чтобы вращать ротор и поддерживать его вращение, тем самым преобразуя электрическую энергию в механическую.
