
Зависимость момента шагового двигателя от скорости
Момент, создаваемый шаговым двигателем, зависит от скорости, тока в обмотках и схемы драйвера. На рис. 1а показана зависимость момента от угла поворота ротора.
Рис. 1. Возникновение мертвых зон в результате действия тренияУ идеального шагового двигателя эта зависимость синусоидальная. Точки S являются положениями равновесия ротора для негруженного двигателя и соответствуют нескольким последовательным шагам. Если к валу двигателя приложить внешний момент, меньший момента удержания, то угловое положение ротора изменится на некоторый угол Ф.
Ф = (N/(2*pi))*sin(Ta/Th),где Ф – угловое смещение,
N – количество шагов двигателя на оборот,
Ta – внешний приложенный момент,
Th – момент удержания.
Угловое смещение Ф является ошибкой позиционирования нагруженного двигателя.
На практике всегда имеется приложенный к двигателю внешний момент, хотя бы потому, что двигателю приходится
преодолевать трение. Силы трения могут быть расделены на две категории: статическое трение или трение покоя,
для
преодоления которого требуется постоянный момент и динамическое трение или вязкое трение, которое зависит от
скорости.
Рассмотрим статическое трение. Предположим, что для его преодоления требуется момент в половину от пикового.
На рис.
1а штриховыми линиями показан момент трения. Таким образом, для вращения ротора остается только момент,
лежащий на
графике за пределами штриховых линий. Отсюда следуют два вывода: трение снижает момент на валу двигателя и
появляются
мертвые зоны вокруг каждого положения равновесия ротора (рис.
d = 2 (S / (pi/2)) arcsin(Tf /Th) = (S / (pi/4)) arcsin(Tf / Th),где d – ширина мертвой зоны в радианах,
S – угол шага в радианах,
Tf – момент трения,
Th – момент удержания.
Мертвые зоны ограничивают точность позиционирования. Например, наличие статического трения в половину от пикового момента двигателя с шагом 90 град. вызовет наличие мертвых зон в 60 град. Это означает, что шаг двигателя может колебаться от 30 до 150 град., в зависимости от того, в какой точке мертвой зоны остановится ротор после очередного шага.
Наличие мертвых зон является очень важным для микрошагового режима. Если, например, имеются мертвые зоны
величиной d,
то микрошаг величиной менее d вообще не сдвинет ротор с места. Поэтому для систем с использованием
микрошагов очень
важно минимизировать трение покоя.
Когда двигатель работает под нагрузкой, всегда существует некоторый сдвиг между угловым положением ротора и ориентацией магнитного поля статора. Особенно неблагоприятной является ситуация, когда двигатель начинает торможение и момент нагрузки реверсируется. Нужно отметить, что запаздывание или опережение относится только к положению, но не к скорости. В любом случае, если синхронность работы двигателя не потеряна, это запаздывание или опережение не может превышать величины двух полных шагов. Это весьма приятный факт.
Каждый раз, когда шаговый двигатель осуществляет шаг, ротор поворачивается на S радиан. При этом минимальный момент имеет в место, когда ротор находится ровно между соседними положениями равновесия (рис. 2).
Рис. 2. Момент удержания и рабочий момент шагового двигателя. Этот момент называют рабочим моментом, он означает, какой наибольший момент может преодолевать двигатель
при вращении
с малой скоростью.
Параметры привода на основе шагового двигателя сильно зависят от характеристик нагрузки. Кроме трения, реальная нагрузка обладает инерцией. Инерция препятствует изменению скорости. Инерционная нагрузка требует от двигателя больших моментов на разгоне и торможении, ограничивая таким образом максимальное ускорение. С другой стороны, увеличение инерционности нагрузки увеличивает стабильность скорости.
Такой параметр шагового двигателя, как зависимость момента от скорости является важнейшим при выборе типа
двигателя,
выборе метода управления фазами и выборе схемы драйвера.
Для того, чтобы момент падал как можно меньше, необходимо обеспечить высокую скорость нарастания тока в
обмотках
двигателя, что достигается применением специальных схем для их питания.
Поведение момента при увеличении частоты коммутации фаз примерно таково: начиная с некоторой частоты среза момент монотонно падает. Обычно для шагового двигателя приводятся две кривые зависимости момента от скорости (рис. 4).
Рис. 4. Зависимость момента от скорости. Внутренняя кривая (кривая старта, или pull-in curve) показывает, при каком максимальном моменте трения для
данной
скорости шаговый двигатель способен тронуться. Эта кривая пересекает ось скоростей в точке, называемой
максимальной
частотой старта или частотой приемистости. Она определяет максимальную скорость, на которой ненагруженный
двигатель
может тронуться. На практике эта величина лежит в пределах 200 – 500 полных шагов в секунду. Инерционность
нагрузки
сильно влияет на вид внутренней кривой. Большая инерционность соответствует меньшей области под кривой.
Шаговые двигатели выбор и расчет основных параметров.
Шаговый двигатель – это электромеханическое устройство, которое преобразует электрические импульсы в дискретные механические движения. Вал шагового двигателя вращается с дискретным шагом, когда на него подаются управляющие импульсы в правильной последовательности. Вращение двигателей напрямую зависит от входящих импульсов, так же они напрямую управляют направлением и скоростью вращения вала двигателя.
Вращение двигателей напрямую зависит от входящих импульсов, так же они напрямую управляют направлением и скоростью вращения вала двигателя.
Преимущества и недостатки шагового двигателя:
Преимущества:
– угол поворта двигателя пропорционален входным импульсам;
– точное позиционирование и повторяемость движения, так как большинство шаговых двигателей имеют точность 3-5% шага, и эта ошибка не суммируется от одного шага к следующему;
– низкая инертность при запуске, остановке и реверсе;
– высокая надежность, поскольку в двигателе отсутствуют контактные щетки, поэтому срок службы двигателя в основном зависит от срока службы подшипников;
– реакция двигателя на цифровые входные импульсы обеспечивает управление без обратной связи, что делает систему более простой и, следовательно, более экономичной;
– можно достичь очень низкой скорости синхронного вращения с нагрузкой, которая напрямую связана с валом;
– можно реализовать широкий диапазон скоростей вращения, так как скорость пропорциональна частоте входных импульсов;
– шаговые двигатели дешевле серводвигателей.
Недостатки:
– может возникнуть явление резонанса, при некорректном расчете узла или системы управления;
– двигатель непрост вэксплуатации наочень высоких скоростях, 3000+ об/мин;
– сложность системы управления;
– падение мощности с ростом скорости вращения;
– отсутствие обратной связи;
– невысокая удельная мощность;
– низкая скорость вращения;
– шум.
Выбор шагового двигателя.
Шаговый двигатель можно использовать когда требуется контролируемое движение. Они могут использоваться в приложениях, где необходимо контролировать угол поворота, скорость, положение и синхронизацию. Из-за присущих выше преимуществ, шаговые двигатели нашли свое место в различных устройствах: принтеры, плоттеры, лазерные резаки, гравировальные станки, устройства захвата и так далее.
При выборе шагового двигателя для вашего устройства необходимо учитывать несколько факторов:
Как двигатель будет связан с нагрузкой?
Какие скорость и ускорения необходимо реализовать?
Какой крутящий момент необходим для перемещения исполнительного механизма?
Какая степень точности требуется при позиционировании?
Количество полюсов (однополюсный/биполярный)
Обычно шаговые двигатели имеют две фазы, но также существуют трех- и пятифазные двигатели. Биполярный двигатель с двумя фазами имеет одну обмотку/фазу, а однополярный двигатель имеет одну обмотку с центральным отводом на фазу. Иногда шаговый двигатель называют четырехфазным двигателем, хотя он имеет только две фазы. Двигатели с двумя отдельными обмотками на фазу могут приводиться в двухполярный или однополярный режим. Желательно, чтобы количество проводов на двигателе соответствовало количеству контактов на драйвере, чтобы не заниматься различными ухищрениями при подключения.
Биполярный двигатель с двумя фазами имеет одну обмотку/фазу, а однополярный двигатель имеет одну обмотку с центральным отводом на фазу. Иногда шаговый двигатель называют четырехфазным двигателем, хотя он имеет только две фазы. Двигатели с двумя отдельными обмотками на фазу могут приводиться в двухполярный или однополярный режим. Желательно, чтобы количество проводов на двигателе соответствовало количеству контактов на драйвере, чтобы не заниматься различными ухищрениями при подключения.
Номинальный ток
Обычно указывается максимальный ток, который подается одновременно на обе обмотки. Максимальный ток через одну обмотку (который действительно имеет значение при использовании микрошагов) указывается достаточно редко. При подаче номинального тока на одну обмотку происходит нагрев двигателя, из-за этого обычно ограничивают ток двигателя не более 85% от номинального тока. Для достижения максимального крутящего момента двигателя без перегрева, необходимо выбрать двигатель с номинальным током не более чем на 25% выше, чем рекомендуемый максимальный ток привода шагового двигателя.
Крутящий момент
Выходной крутящий момент и мощность шагового двигателя зависят от размера двигателя, теплоотвода, рабочего цикла, обмотки двигателя и типа используемого привода. Если шаговый двигатель работает без нагрузки во всем диапазоне частот, одна или несколько точек собственных колебаний резонанса могут быть обнаружены либо по звуку, либо по датчикам вибрации. Полезный крутящий момент от шагового двигателя может быть резко уменьшен за счет резонансов. Работы на резонансных частотах следует избегать. Внешнее демпфирование, дополнительная инерция или применение микрошагов используются для уменьшения эффекта резонанса.
Удерживающий момент
Это максимальный крутящий момент, который может обеспечить двигатель, когда обе обмотки находятся под напряжением при полном токе. Крутящий момент пропорционален току (за исключением очень малых токов), поэтому, например, если вы установите драйверы на 85% от номинального тока двигателя, то максимальный крутящий момент будет 85% * 0,707 = 60% от указанного удерживающего момента.
Крутящий момент возникает, когда угол ротора отличается от идеального угла, который соответствует току в его обмотках. Когда шаговый двигатель ускоряется, возникает крутящий момент для преодоления собственной инерции ротора и массы нагрузки, приводимой в движении. Чтобы создать этот крутящий момент, угол ротора должен отставать от идеального угла.
Известно, что использование микрошага снижает крутящий момент. На самом деле это означает, что угол запаздывания равен углу, соответствующему одному микрошагу (поскольку вы хотите, чтобы положение было с точностью до одного микрошага), более высокое значение микрошага предполагает уменьшение угла, а значит и уменьшение крутящего момента. Крутящий момент на единицу угла (что действительно имеет значение) не уменьшается при увеличении микрошага. Иными словами, отправка импульса на двигатель на один микрошаг 1/16 приводит к точно таким же фазовым токам (и, следовательно, к тем же силам), что и к отправке двух 1/32 микрошагов или четырех 1/64 микрошагов и так далее.
Размер
Шаговые двигатели также классифицируются в соответствии с размерами корпуса, которые соответствуют размеру рамы двигателя. Например, шаговый двигатель NEMA11 имеет размер рамы приблизительно 1,1 дюйма (28 мм). Аналогично, шаговый двигатель NEMA23 имеет размер корпуса 2,3 дюйма (57 мм) и т. д. Однако длина корпуса может изменяться от двигателя к двигателю в рамках одной и той же классификации размеров, при этом крутящий момент двигателя с определенным размером рамы будет увеличиваться с увеличением длины корпуса.
NEMA8:
– габарит рамы 20х20 мм;
– диапазон длин: 30-42 мм;
– крутящий момент: 0,18-0,3 кг*см.
NEMA11
– габарит рамы 28х28 мм;
– диапазон длин: 32-51 мм;
– крутящий момент: 0,43-0,9 кг*см.
NEMA14
– габарит рамы 35х35 мм;
– диапазон длин: 28 мм;
– крутящий момент: 1,0 кг*см.
NEMA16
– габарит рамы 39х39 мм;
– диапазон длин: 20-38 мм;
– крутящий момент: 0,65-2,0 кг*см.
NEMA17
– габарит рамы 42х42 мм;
– диапазон длин: 25-60 мм;
– крутящий момент: 1,7-6,5 кг*см.
NEMA23
– габарит рамы 56х56 мм;
– диапазон длин: 41-76 мм;
– крутящий момент: 2,88-18,9 кг*см.
NEMA34
– габарит рамы 86х86 мм;
– диапазон длин: 65-156мм;
– крутящий момент: 34-122 кг*см.
NEMA43
– габарит рамы 110х110 мм;
– диапазон длин: 99-201 мм;
– крутящий момент: 112-280 кг*см.
NEMA51
– габарит рамы 130х130 мм;
– диапазон длин: 165-270 мм;
– крутящий момент: 270-500 кг*см.
Угол шага.
Существует два распространенных угла шага: 0,9 и 1,8 градуса на полный шаг, что соответствует 400 и 200 шагам/оборот. Большинство устройств используют двигатели с шагом 1,8 град/шаг.
При заданной скорости вращения 0,9-градусный двигатель производит вдвое больше индуктивной обратной эдс, чем 1,8-градусный двигатель, из-за этого возможно будет необходимо использовать питание 24 В для достижения высоких скоростей с двигателями 0,9 градуса.
Для двигателей 0,9 градуса необходимо подавать шаговые импульсы драйвера с удвоенной скоростью по сравнению с двигателями 1,8 градуса. Если вы используете высокий микрошаг, тогда скорость может быть ограничена скоростью, с которой электроника может генерировать шаговые импульсы.
Разрешение и точность позиционирования.
На разрешение и точность позиционирования системы шагового двигателя влияют несколько факторов: угол шага (длина полного шага шагового двигателя), выбранный режим движения (полный шаг, полшага или микрошаг) и скорость передачи. Это означает, что есть несколько различных комбинаций, которые можно использовать для получения желаемого разрешения, из-за этого проблема разрешения обычно может быть решена после того, как были определены размер двигателя и тип привода.
Самоиндукция .
Индуктивность двигателя влияет на скорость, с которой драйвер шагового двигателя может приводить двигатель в действие до падения крутящего момента. Если мы временно игнорируем обратную эдс из-за вращения, а номинальное напряжение двигателя намного меньше, чем напряжение питания привода, то максимальные обороты в секунду перед падением крутящего момента составляют:
Если мы временно игнорируем обратную эдс из-за вращения, а номинальное напряжение двигателя намного меньше, чем напряжение питания привода, то максимальные обороты в секунду перед падением крутящего момента составляют:
оборотов_в_секунду=(2*напржение_БП)/(шагов_на оборот*3,14* индуктивность* ток)
Если двигатель приводит ремень GT2 через шкив, это дает максимальную скорость в мм/с как:
скорость=(4*кол-во_зубьев_шкива*напряжение_БП)/(шагов_на_оборот*3,14* индуктивность*ток)
Например:
двигатель 1,8 град/шаг ( т. е. 200 шагов/об) с индуктивностью 4 мГн работает при 1,5, А при напряжении питания 12 В, и привод ремня GT2 с 20-зубчатым шкивом начинает терять крутящий момент со скоростью около 250 мм/с.
На практике крутящий момент начинает падать раньше, чем это из-за обратной эдс, вызванной движением, потому что не учитывается сопротивление обмоток. Моторы с низкой индуктивностью также имеют низкую ЭДС из-за вращения. Для достижения высоких скоростей, необходимо выбирать двигатели с низкой индуктивностью и высоким напряжением питания.
Для достижения высоких скоростей, необходимо выбирать двигатели с низкой индуктивностью и высоким напряжением питания.
Сопротивление и номинальное напряжение
Это сопротивление на фазу и падение напряжения на каждой фазе, когда двигатель неподвижен, и фаза передает свой номинальный ток (который является результатом сопротивления и номинального тока). Это важно когда номинальное напряжение значительно ниже напряжения питания для шаговых драйверов.
Обратный ЭДС из-за вращения
Когда шаговый двигатель вращается, то создается обратная эдс. При идеальном нулевом угле запаздывания на 90 градусов не в фазе с напряжением возбуждения, а в фазе с обратной ЭДС из-за индуктивности. Когда двигатель выдает максимальный крутящий момент и находится на грани пропуска шага, он находится в фазе с током.
Обратный ЭДС из-за поворота обычно не указывается в спецификации, но мы можем оценить его по следующей формуле:
ЭДС= 1,414*3,14*момент_удержания*оборотов_в_секунду/номинальный_ток
Формула предполагает, что удерживающий момент указан для обеих фаз, находящихся под напряжением при номинальном токе. Если это указано только с одной фазой под напряжением, замените 1,414 на 2.
Пример: рассмотрим 200-шаговый двигатель, приводящий каретку через шкив с 20 зубцами и ремень GT2. Это 40-миллиметровое движение за оборот. Для достижения скорости 200 мм/сек нам нужно 5 об/сек. Если мы используем двигатель с удерживающим моментом 0,55 Нм, когда обе фазы работают при 1,68, А, пиковая обратная эдс из-за вращения составляет
1,414 * 3,142 * 0,55 * 5 / 1,68 = 7,3 В.
Как вбрать необходимое напряжение питания
Если заранее известна необходимая скорость движения для вашего устройства, можно предварительно определить, какое напряжение питания вам потребуется для драйверов двигателя.
Пример: определим необходимую скорость движения. Для этого примера будем использовать 200 мм/сек, передача шкив 20 зубьев GT2.
Исходя из необходимой скорости движения, определим максимальную скорость ремня.
Прикинем обратную ЭДС от индуктивности:
напряжение=шагов_в_сек*3,14*ток_двигателя*ЭДС_двигателя*N/2
где N – число полных шагов на оборот (200 для двигателей с 1,8 градусами или 400 для двигателей с 0,9 градусами).
Возьмем для примера двигателя со следующими параметрами: 0,9 градуса с индуктивностью 4,1 мГн, и токе 1А. Таким образом, обратная эдс из-за индуктивности составляет:
5*3,142*1,0*4,1e-3*400/2 = 12,87 В
Вычислим обратную ЭДС из-за вращения по приведенной ранее формуле.
Двигатели для примера имеют номинальный ток 1,68А и момент удержания 0,44 Нм, поэтому результат равен:
1,414*3,142*0,44*8,7/1,68 = 10,1 В
Предпочтительно, чтобы напряжение питания драйвера составляло по меньшей мере сумму этих двух обратных эдс, плюс еще несколько вольт запаса. При использовании двух двигателей последовательно требуемое напряжение удваивается.
Алгоритм выбора шагового двигателя
1. Определение компонента механизма привода .
Определите механизм и необходимые входные данные, вариант механизма, приблизительные размеры, расстояния перемещения и время позиционирования.
2. Рассчитайте необходимое разрешение.
Рассчитайте необходимое разрешение.
Найдите разрешение, необходимое для двигателя. Исходя из требуемого разрешения, определите, будет ли использоваться только двигатель или мотор-редуктор . Тем не менее, благодаря использованию технологии микрошагов, достичь требуемого разрешения стало гораздо легче.
3. Определите схему работы
Определите схему работы, которая соответствует требуемым данных. Рассчитайте значения ускорения (замедления) и скорость рабочего импульса, чтобы рассчитать момент ускорения.
4. Рассчитайте необходимый крутящий момент.
Рассчитайте момент нагрузки и момент ускорения и найдите требуемый момент, требуемый двигателем.
5. Выберите двигатель.
Сделайте предварительный выбор двигателя на основе требуемого крутящего момента. Определите используемый двигатель по характеристикам скорости и крутящего момента.
6. Проверьте выбранный двигатель.
Подтвердите скорость ускорения / замедления и коэффициент инерции.
Общие рекомендации:
– если не планируется использовать внешние драйверы шаговых двигателей, выбирайте двигатели с номинальным током не менее 1,2, А и не более 2,0 А.
– рассчитывайте на рабочий ток шагового двигателя 50-85% от номинального.
– размер:
Nema 17- самый популярный размер, используемый в домашних проектах.
Nema 23 необходимо использовать если не хватает крутящего момента от длинных двигателей Nema 17.
– старайтесь не использовать двигатели с номинальным напряжением (или произведением номинального тока и фазового сопротивления)> 4 В или индуктивности> 4 мГн.
– выборйте двигатель с 0,9 град/шаг, если необходима дополнительная точность позиционирования, для стандартных решений используйте двигатели 1,8 град/шаг.
– при использовании 0,9 градусных шаговых двигателей или двигателей с высоким крутящим моментом, необходимо применение блоков питания с напряжением 24 В, чтобы поддерживать крутящий момент на более высоких скоростях.
Реальная шаговая скорость
Четыре основных ограничения скорости двигателя в 3D-принтере:
- Пределы частоты генерации прошивки
- Прошивка эффектов планировщика движения
- Потеря крутящего момента и точности из-за индуктивности катушки двигателя и эффектов обратной ЭДС
- Среднечастотный резонанс
Пределы скорости генерации шага будут зависеть от встроенного программного обеспечения и используемой платы контроллера. Существует значительный диапазон, особенно когда 32-битные прошивки и RTOS-платформы, такие как MachineKit, сравниваются с 8-битными прошивками, работающими на Atmega AVR. Некоторые примеры:
- Марлин на 16-МГц 8-битном процессоре Atmega может работать только с шаговым прерыванием на частоте 10000 Гц, не перегружая процессор и не блокируя другие важные алгоритмы (например, планирование движения). Он может генерировать частоту шагов до 40000 Гц, пульсируя линию шага два или четыре раза за прерывание, что эффективно снижает программный уровень микрошага и запускает двигатели более грубые / громкие.

- Repetier на том же Atmega может запускать шаговое прерывание на частоте 12000 Гц, потому что оно оптимизировано больше для скорости выполнения, чем Marlin.
- Repetier на 32-битной ARM Cortex-M3 с тактовой частотой 84 МГц может работать с шаговым прерывателем на частоте 80 000 Гц.
Эти ограничения обычно влияют только на фактическую скорость шагового двигателя, когда используется относительно тонкий микрошаг.Рассмотрим пример, основанный на очень типичной конфигурации принтера Marlin. Настоятельно рекомендуется использовать микрошаг по меньшей мере 1/4, чтобы избежать проблем с резонансом, поэтому давайте начнем со ступени 1/16. Это позволяет четырехшаговому выводу эффективно выводить 1/4 шага. Начиная с более тонкого микрошагового режима, мы снижаем нашу максимальную скорость, а более грубый микрошаговый шаг будет громче и может вызвать резонанс, так что это хорошая отправная точка. Затем предположим типичный шкив 32 мм на оборот на шаговом двигателе 1,8 градуса (200 шагов / об).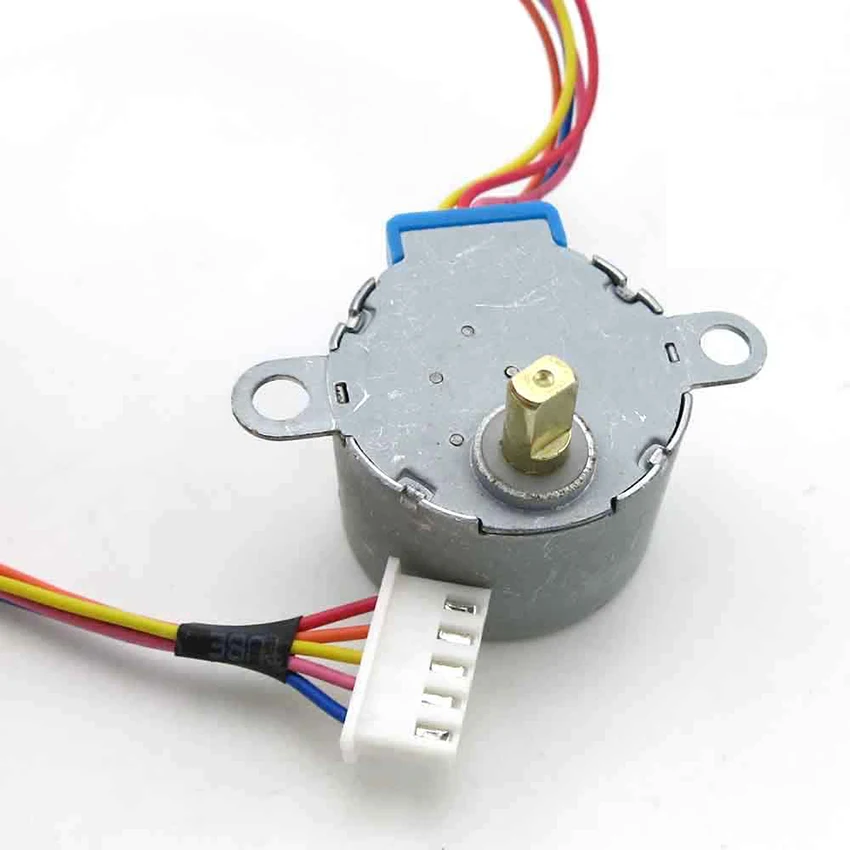 Эта система имеет разрешение 200 * 16/32 = 100 шагов / мм. При общей скорости степпинга 40 000 Гц (четырехступенчатый шаг при 10000 Гц) мы можем теоретически двигаться со скоростью 400 мм / с, прежде чем ударить по твердой крышке Марлина. Вероятно, в любом случае это будет более высокая частота вращения, чем мы хотим запустить двигатель, так что это не очень сильный предел.
Эта система имеет разрешение 200 * 16/32 = 100 шагов / мм. При общей скорости степпинга 40 000 Гц (четырехступенчатый шаг при 10000 Гц) мы можем теоретически двигаться со скоростью 400 мм / с, прежде чем ударить по твердой крышке Марлина. Вероятно, в любом случае это будет более высокая частота вращения, чем мы хотим запустить двигатель, так что это не очень сильный предел.
Для сравнения, если мы начнем с шага 1/128 (например, с чипом драйвера THB6128), наша максимальная скорость с 8-битным Marlin будет равна 50 мм / с. Это довольно медленно.
Планировщики движений встроенного программного обеспечения могут дополнительно ограничивать скорость двигателя, увеличивая и уменьшая скорость поворота и поворота. Если геометрия модели имеет много крутых поворотов, целевые скорости, заданные gcode, скорее всего, никогда не будут достигнуты. Только длинные прямые пути будут иметь достаточное время для достижения скорости. Вы можете убедиться в этом сами, распечатав очень маленькую модель с различными скоростями подачи и выбрав время фактической продолжительности печати: в определенный момент увеличение заданной скорости не повлияет на фактическое время печати.
Другое ограничение, которое навязывают некоторые прошивки, – это необходимость безопасного замедления до остановки в пределах длины всех команд движения в очереди планировщика. Это позволяет принтеру корректно обрабатывать внезапные потери ввода, например, если хост-компьютер прекращает передачу команд USB или если на SD-карте произошла серия ошибок чтения. Если принтер просто резко останавливается на полной скорости, когда у него заканчиваются команды, он может потерять позицию и испортить печать. Принимая во внимание, что если он может замедляться до безопасной скорости остановки, он может возобновить работу после возобновления потока команд.
С точки зрения фактического поведения двигателя, индуктивность и противо-ЭДС вводят значительные ограничения, поскольку они уменьшают крутящий момент двигателя при более высоких оборотах. Это дает кривую крутящего момента / оборотов, которая падает на более высоких скоростях:
http://www.geckodrive.com/support/step-motor-basics. html
Обратите внимание на изображение, что на низких скоростях имеется левая область с постоянным током. Это диапазон, где ограничитель тока ограничивает ток катушки. На правой стороне кривой ток не может достичь цели, прежде чем он должен быть отключен для следующего шага. Это уменьшает напряженность поля и, следовательно, крутящий момент.
Здесь необходимо рассмотреть два отдельных эффекта:
- Катушки двигателя являются индукторами, что означает, что существует разрыв первого порядка между приложенным напряжением и током катушки. Стандартный биполярный шаговый двигатель с микропереходным драйвером должен увеличивать ток катушки от нуля до максимума или от максимума до нуля на каждом полном шаге (например, каждые шестнадцать 1/16 микротестов). При высоких скоростях шага не хватает времени, чтобы полностью зарядить катушку до ее максимального тока, прежде чем следующий шаг потребует понижения тока вниз. Без развития полного тока катушки на каждом шаге крутящий момент теряется.

- Каждый двигатель также является генератором, и вращение ротора создает напряжение обратной ЭДС внутри катушек двигателя. Этот сигнал напряжения накладывается поверх сигнала напряжения возбуждения с фазовым сдвигом, зависящим от положения ротора относительно положения возбуждения катушки. Проще говоря, это напряжение пытается затормозить двигатель: оно всегда делает все, что замедляет двигатель. Это означает, что оно противодействует приложенному напряжению привода, когда двигатель прикладывает прямой крутящий момент, или помогает приложенному напряжению привода, когда двигатель прикладывает тормозной момент.
Для практического обсуждения ограничений скорости мы можем упростить ситуацию, предполагая, что напряжение обратной ЭДС противоположно напряжению возбуждения, приложенному к катушкам. Это означает, что существует более эффективный ток повышения / понижения напряжения в катушке, и для изменения тока требуется больше времени, и развивается меньший ток в катушке, чем в случае без обратной эдс. Это дополнительно снижает кривую крутящий момент / обороты двигателя. И когда напряжение противо-ЭДС составляет примерно ту же величину, что и напряжение возбуждения, может возникнуть значительная нестабильность двигателя из-за сложных эффектов обратной связи между положением ротора и эффективным напряжением катушки.
Это дополнительно снижает кривую крутящий момент / обороты двигателя. И когда напряжение противо-ЭДС составляет примерно ту же величину, что и напряжение возбуждения, может возникнуть значительная нестабильность двигателя из-за сложных эффектов обратной связи между положением ротора и эффективным напряжением катушки.
Вы можете играть с этими эффектами, используя различные конфигурации двигателя и скорости для нескольких популярных драйверов степперов 3D-принтеров, используя мой имитатор драйвера степпера: https://github.com/rcarlyle/StepperSim
В применениях с обратной связью с обратной связью по положению и высокопроизводительными драйверами, которые могут подавлять различные режимы нестабильности, может быть вполне приемлемым прогонить шаговый двигатель до конца по кривой крутящего момента при очень высоких оборотах. В более типичных 3D-принтерах с разомкнутым контуром, как правило, лучше придерживаться части кривой крутящего момента с низким числом оборотов в минуту, прежде чем индуктивность и обратная ЭДС действительно изменят поведение двигателя. Потеря слишком большого крутящего момента может легко означать пропуск шагов и потерю позиции, разрушая отпечаток.
Потеря слишком большого крутящего момента может легко означать пропуск шагов и потерю позиции, разрушая отпечаток.
Другим важным эффектом для степперов является резонанс средней полосы . Это не обычный механический резонанс, а фактически эффект электромеханического резонанса. Это довольно сложно, но короткое объяснение состоит в том, что степпер имеет собственный 90-градусный фазовый сдвиг между положением и крутящим моментом, и когда скорости повышаются до точки, где индуктивность катушки вводит дополнительный 90-градусный фазовый сдвиг между током катушки и приложенным напряжением, электромеханическая система имеет чрезвычайно нестабильную задержку фазы на 180 градусов и, таким образом, создает отрицательную петлю обратной связи. Это может быстро понизить крутящий момент двигателя, пока двигатель не потеряет синхронность с приложенным напряжением водителя и не остановится.
Среднечастотный резонанс возникает только тогда, когда ток катушки ограничен индуктивностью. Это не может произойти в диапазоне привода с постоянным током, поскольку между приложенным напряжением и током в катушке недостаточно фазовых задержек.
Это не может произойти в диапазоне привода с постоянным током, поскольку между приложенным напряжением и током в катушке недостаточно фазовых задержек.
http://www.geckodrive.com/support/step-motor-basics.html
К сожалению, кривые измеренных крутящих моментов, доступные от производителей, почти никогда не показывают резонансные зоны, потому что кривые создаются нагрузкой двигателей тормозами с трением, которые демпфируют любой резонансный эффект от здания. В то время как нагрузка на трансмиссию 3D-принтера почти полностью инерционная (ускоряет массу), которая гораздо более подвержена резонансу.
Высококачественные драйверы могут автоматически обнаруживать и демпфировать среднечастотный резонанс, но типичные недорогие драйверы 3D-принтеров не имеют этой возможности.
Обычно целесообразно избегать попадания в диапазон оборотов, в котором может возникнуть резонанс в средней полосе. Это легко сделать, придерживаясь левой стороны кривой крутящего момента в рабочей области постоянного тока. Это обеспечивает высокий крутящий момент и хорошую стабильность.
Это обеспечивает высокий крутящий момент и хорошую стабильность.
В качестве конкретного примера рассмотрим популярный степпер Kysan 1124090 с источником питания 24 В.
Kysan 1124090 Nema 17 Stepper Motor
Чтобы поддерживать высокий крутящий момент и избегать резонанса в средней полосе, мы хотели бы поддерживать частоту вращения до 400 или менее. Для того же шкива со скоростью 32 мм на оборот, упомянутого выше, скорость будет ограничена до 200-240 мм / с. Возможны более высокие скорости, но могут возникнуть проблемы с надежностью.
Эта скорость, конечно, предполагает использование блока питания 24 В для согласования с кривой измеренного крутящего момента: блок питания 12 В будет иметь значительно более низкую максимальную скорость, прежде чем индуктивность начнет ограничивать ток катушки, примерно вдвое быстрее. Более высокое напряжение питания значительно увеличивает максимальную эффективную скорость двигателя.
Опять же, вы можете легко смоделировать этот эффект (используя https://github. com/rcarlyle/StepperSim ). Эта диаграмма выхода симулятора показывает, как индуктивность и обратная ЭДС удерживают ток катушки от достижения цели:
com/rcarlyle/StepperSim ). Эта диаграмма выхода симулятора показывает, как индуктивность и обратная ЭДС удерживают ток катушки от достижения цели:
Для практического проектирования трансмиссии симулятор двигателя / водителя – действительно лучший инструмент в наборе инструментов для определения точки, где производительность начнет ухудшаться из-за неспособности поразить текущие цели. Просто слишком сложно применять простые уравнения или эмпирические правила с какой-либо точностью. Эти электрические эффекты и пределы генерации микропрограммного обеспечения, вероятно, будут двумя основными ограничениями скорости двигателя для большинства принтеров.
Конечно, то, как быстро вы можете расплавить пластик, будет иметь тенденцию значительно ограничивать скорость печати ниже истинных пределов скорости двигателя, но это другое обсуждение. На данный момент мы можем просто сказать, что максимальная скорость двигателя, как правило, не важна для печати на типичных декартовых принтерах. Однако есть несколько случаев, когда они могут повысить производительность принтера:
- Линейные дельты, где вагоны, возможно, должны работать в несколько раз быстрее, чем эффектор для определенных направлений движения
- Экструдеры с редуктором с высоким коэффициентом редукции (например, более 5: 1) для высоких скоростей отвода
- Ведущие винты с коротким шагом (или с цельной резьбой), которым необходимы высокие скорости вращения для достижения умеренных линейных скоростей
Ускорение шагового двигателя.
Н.Филенко
Зачем это нужно?
В хоббийных (любительских) конструкциях станков с ЧПУ и различных устройств автоматики, где основным исполнительным элементом является шаговый двигатель, очень популярны простейшие схемы коммутации обмоток шаговых двигателей. Чаще всего они представляют собой связку из генератора последовательности импульсов, в качестве которого может выступать LPT порт компьютера и соответствующая программа, а также драйвера (усилителя), в качестве которого используются полевые или биполярные транзисторы и транзисторные сборки. Схемы очень просты и доступны для повторения даже начинающим электронщикам. Но вместе с простотой они таят в себе одну неприятность, с которой рано или поздно сталкиваются все – малые скорости вращения шагового двигателя, только изредка достигающие 4-5 оборотов в секунду. Для станков с ЧПУ, где подача выполнена по схеме гайка-винт, этого оказывается недостаточно, поскольку соответствует максимальной скорости перемещения не более 10 мм/сек и то в лучшем случае.
Схемы очень просты и доступны для повторения даже начинающим электронщикам. Но вместе с простотой они таят в себе одну неприятность, с которой рано или поздно сталкиваются все – малые скорости вращения шагового двигателя, только изредка достигающие 4-5 оборотов в секунду. Для станков с ЧПУ, где подача выполнена по схеме гайка-винт, этого оказывается недостаточно, поскольку соответствует максимальной скорости перемещения не более 10 мм/сек и то в лучшем случае.
Почему так происходит? Все дело в скорости нарастания тока на индуктивности обмоток.
В соответствии с правилом Ленца при включении в цепь постоянного тока индуктивности, в ней возникает ЭДС самоиндукции, которая препятствует изменению тока в цепи, замедляя его возрастание, а также спад тока при размыкании цепи.
Ток не может вырасти мгновенно до номинального значения, а следовательно, крутящий момент двигателя тоже нарастает не мгновенно, а по экспоненте.
Взгляните на диаграмму:
На малых скоростях вращения ток в обмотке двигателя после подачи на него импульса напряжения успевает достичь своего номинального значения и момент двигателя практически соответствует паспортному значению.
Диаграмма нарастания тока обмотки в ШД
Но при попытке увеличении скорости вращения не только увеличивается скорость коммутации обмоток, но также уменьшается время, на которое подается напряжение на обмотку. При критической скорости ток в обмотке двигателя еще не успевает вырасти до номинального значения, а напряжение с обмотки уже снимается.
Происходит снижение крутящего момента, двигатель начинает пропускать шаги и в конечном счете просто останавливается.
Как же с этим бороться?
Очевидно, нужно попытаться увеличить скорость нарастания тока в обмотке шагового двигателя, чтобы ток успевал достичь своего максимума даже на больших скоростях.
Для этого необходимо хотя бы «краем глаза» заглянуть в теорию.
Рассмотрим эквивалентную схему обмотки двигателя.
Эквивалентная схема представляет собой последовательно соединенные индуктивность и омическое сопротивление.
В соответствии с законом изменения силы тока в цепи постоянного тока, скорость нарастания тока в обмотке прямо пропорциональна приложенному к ней напряжению, а так же соотношению R/L(омического сопротивления к величине индуктивности)
Т.е. чем больше приложенное напряжение, тем быстрее вырастает ток.
И в свою очередь, чем больше соотношение R/L, тем также быстрее растет ток.
Вывод: Для ускорения двигателя надо или повышать напряжение или соотношение R/L.
Рассмотрим каждый из вариантов ускорения.
Начнем с соотношения R/L. Конструкция двигателя нами не может быть изменена, т.е. ни величину L, ни величину R мы изменить не можем. Но оказывается, можно увеличить эквивалентную величину R последовательным включением с обмоткой двигателя дополнительного резистора Rд
Несмотря на то что резистор не является конструктивным элементом двигателя, он приводит к увеличению отношения и это отношение принимает вид (R+Rд)/L.
То есть увеличивая величину Rд мы фактически ускоряем двигатель.
Но! Увеличение Rд приводит к снижению тока в обмотке двигателя, т.е потере момента.
Что делать? Выход один – увеличивать приложенное напряжение до тех пор, пока ток через обмотку не станет номинальным.
И тут проявляется один очень неприятный недостаток такой схемы – увеличение приложенного к схеме напряжения и возрастание тока через Rд приводит к увеличению выделяемой на нем мощности, т.е. к нагреву добавочного резистора. Эти резисторы должны быть способны рассеивать достаточную мощность, 10 и более ватт в зависимости от мощности двигателя и увеличения напряжения.
Попробуем рассчитать резистор и рассеиваемую на нем мощность.
Допустим, ваш двигатель имеет омическое сопротивление 1 Ом и номинальный ток обмотки 2 А. Без добавочного резистора вы должны были бы питать двигатель напряжением 2 Вольта. Вы решили увеличить напряжение в 10 раз, т.е. до 20 вольт. Чтобы получить ток 2 А, общее сопротивление (R+Rд) должно быть равным (R+Rд)= U/I, т. 2*Rд=I*I*Rд=36 Ватт.
2*Rд=I*I*Rд=36 Ватт.
Очевидно, для надежной работы такой резистор должен рассеивать мощность не менее 40-50 ватт. Это очень большие резисторы, и очень большие потери мощности, поэтому такая схема применяется только для маломощных двигателей.
Рассмотрим второй вариант разгона:
Для этого нужно повысить напряжение, приложенное к обмотке двигателя.
Но! Безконтрольное повышение напряжения при простейшей коммутации приведет к возрастанию тока на омическом сопротивлении и следовательно к чрезмерному нагреву обмоток и двигателя в целом.
Какой выход?
Выход в применении схем стабилизации или контроля тока через обмотку двигателя.
Например, схем с ключевым (широтно – импульсным управлением), так называемые
Схемы ШИМ.
Разновидностью такой схемы является схема, примененная в драйверах шаговых двигателей SMA7020(7022, 7024, 7026, SLA7029)
Принцип работы:
Схема состоит из ключевого транзистора и петли регулирования тока в которую входит измерительный резистор Rs и компаратор.
При включении питания и отсутствии тока через обмотку двигателя компаратор включает ключевой элемент (транзистор), через который начинает течь ток обмотки шагового двигателя. Благодаря индуктивности обмотки, ток в обмотке возрастает не мгновенно, а по экспоненте, что дает возможность контролировать его и разомкнуть цепь тока в нужный момент, ограничив тем самым ток обмотки. Как это происходит?
По мере роста тока возрастает напряжение на измерительном резисторе Rs. Когда это напряжение достигнет напряжения Vref, компаратор переключиться и выключит ключевой транзистор. Ток в обмотке начнет уменьшаться. Напряжение на резисторе Rs также уменьшается и до уровня обратного срабатывания компаратора. Компаратор снова переключится и включит ключевой транзистор. Ток в обмотке снова начнет расти. Процесс циклически повторяется до момента снятия напряжения питания.
Изменение тока в обмотке зависит от величины резистора Rs, гистерезиса компаратора и наличия интегрирующих и дифференципрующих цепочек в петле обратной связи.
Изменяя напряжение Vref можно регулировать ток через обмотку двигателя.
В данной схеме обеспечивается постоянство амплитуды пульсаций, но частота пульсаций зависит от напряжения питания и индуктивности обмотки.
Недостатком схемы является сложность синхронизации работы при необходимости одновременной стабилизации двух обмоток двигателя.
Поэтому применяется схема в основном для питания маломощных двигателей.
Другая разновидность схемы используется в большинстве современных блоков управления.
Ее особенность – постоянная частота переключения и малый уровень пульсаций, который обычно не превышает 10%.
Принцип работы.
Генератор фиксированной частоты вырабатывает импульсы, устанавливающие триггер в состояние, открывающее выходной транзистор. Ток в обмотке двигателя начинает возрастать, вследствие чего, на измерительном резисторе Rs, включенном в цепь двигателя, возрастает напряжение. Как только напряжение достигнет напряжения Uref, компаратор переключится и сбросит триггер в исходное состояние. В результате ключ выключается и ток в обмотке двигателя начинает спадать. Частота тактового генератора подобрана таким образом, чтобы спад не был сильно глубоким и следующий импульс поступает не позже, чем ток снизится на 5-10%.
Как только напряжение достигнет напряжения Uref, компаратор переключится и сбросит триггер в исходное состояние. В результате ключ выключается и ток в обмотке двигателя начинает спадать. Частота тактового генератора подобрана таким образом, чтобы спад не был сильно глубоким и следующий импульс поступает не позже, чем ток снизится на 5-10%.
Новый импульс с генератора включит выходной транзистор и ток обмотки снова начинает возрастать. Процесс повторяется периодически.
Повышение питающего напряжения вызывает только увеличение скорости нарастания тока (ускорение двигателя), но пиковый ток в обмотке двигателя контролируется цепью обратной связи и остается постоянным. Постоянной остается и частота переключений, которую обычно выбирают за пределом слышимости (более 20 кГц).
Такая схема применяется в большинстве современных контроллеров и драйверов управления шаговыми двигателями, как очень эффективная.
Благодаря наличию входа управления током двигателя –Vref, в этих схемах возможна реализация микрошагового управления или многоуровневого (плавного или ступенчатого) регулирования тока, например снижение величины тока в режиме удержания или еще большее снижение тока в «режиме сна».
Сравнение схем управления.
На временной диаграмме показано нарастание тока в обмотке ШД для разных схем. Из диаграммы становится ясно, что
оптимальным вариантом по быстродействию является именно ключевая стабилизация тока.
Переделывать ли простейший контроллер?
Нет, не нужно, можно дополнить его простой схемой ключевой стабилизации тока обмотки.
Схема подключается к уже действующему контроллеру всего 2-мя проводами:
1– корпус.
2 – провод идущий от коллектора ключевого транзистора подключается к эмиттерам транзисторов одного канала, которые отсоединяются от корпуса.
Аналогичным образом соединяется и первый вариант схемы ключевой стабилизации, например на драйвере шагового двигателя SLA7026.
К сожалению, данная схема эффективна только в полношаговом режиме.
В режиме полушага в некоторые моменты включены параллельно две обмотки шагового двигателя. А ток ограничивается как бы для одной. В результате ток в каждой обмотке в 2 раза меньше, чем если бы была запитана только одна обмотка. Результирующий же ток ( и момент двигателя) в момент одновременной работы двух обмоток падают до 0, 7 от номинального.
Выход из ситуации в двухканальном стабилизаторе тока, каждый из каналов которого контролирует свою пару обмоток. В результате в полушаговом режиме при включении одновременно двух обмоток результирующий момент увеличивается до 1,4 от номинального.
Но в этом случае желательно принять меры к синхронизации каналов стабилизации для уменьшения взаимных помех и точно подобрать резисторы Rs, в обеих каналах они должны быть одинаковы. Как уже было сказано, использование первого типа широтно импульсного регулирования(SLA7026) в двухканальном варианте затруднительно.
В целях упрощения конструкции можно использовать внешний генератор например на таймере К1006ВИ(NE555) или MC1455, синхронизирующий работу сразу всех каналов контроллера.
Практическая реализация стабилизаторов тока.
Схема 1.
Реализована на драйверах шаговых двигателей SLA7026, но может быть использованы аналогичные микросхемы SLA7022, SLA7024, SMA7029.
каждая микросхема используется для стабилизации тока двух двигателей или как двухканальная для одного маломощного двигателя.
Схема включения – типовая для примененных драйверов.
Резисторы подключенные к выводам 9 и 10 – измерительные, они определяют пиковый ток через обмотки двигателей, который должен быть не выше 2 А для драйвера SLA7026 и не выше 1 А для других типов драйверов.
Регулировка тока в обоих каналах одновременно возможна изменением резистора Rp.
Схема 2.
Основу доработки составляет широко распространенная, недорогая, специализированная микросхема для импульсных источников питания UC3842. Существует несколько разновидностей этой микросхемы, выпускаемых под разными брэндами:
Существует несколько разновидностей этой микросхемы, выпускаемых под разными брэндами:
Unitrode,Unitra,Solitron,Philips,Semiconductors. Аналоги микросхемы KA3842,DBL3842,SG3842,TL3842,KIA3842,GL3842, и др. Ввиду массовости применения, стоимость этих микросхем очень низка.
Принцип работы:
Напряжение питания 16-36 вольт подается на вывод 7 микросхемы.
Компараторы в цепи питания включают встроенный стабилизатор опорного напряжения и разрешают прохождение сигналов управления к выходным транзисторам. Генератор(Oscillator) формирует импульсы высокой частоты (20 и более кГц), первый из которых устанавливает триггер в открытое состояние. Сигнал с выхода триггера через логический элемент включает выходной драйвер. Напряжение с драйвера открывает выходной транзистор, включенный в цепь обмоток шаговых двигателей и ток в обмотке начинает возрастать. На резисторе Rs начинает возрастать напряжение, которое пропорционально току в обмотке. Как только напряжение достигнет величины 1 Вольт, компаратор контроля тока (Current sense comparator) переключит триггер в исходное состояние, что приведет к выключению выходного ключа. По мере поступления следующего импульса с генератора Триггер вновь переключится, ключ открывается и ток через обмотку снова начинает возрастать. Процесс повторяется. Для упрощения схемы не используется часть схемы, обеспечивающая (в блоках питания) обратную связь по напряжению, но и стабилизатора тока нам вполне достаточно.
По мере поступления следующего импульса с генератора Триггер вновь переключится, ключ открывается и ток через обмотку снова начинает возрастать. Процесс повторяется. Для упрощения схемы не используется часть схемы, обеспечивающая (в блоках питания) обратную связь по напряжению, но и стабилизатора тока нам вполне достаточно.
Печатная плата данной схемы от VVChaif в формате SprintLayout
обсуждение этой платы в форуме
Частота тактового генератора задается резистором подключенным к выводам 4 и 8, а также конденсатором, подключенным к выводу 4.
Ориентировочно величины конденсатора и резистора можно определить по таблице:
Для регулировки частоты вместо постоянного резистора, подключенного вк выводам 4 и 8, можно применить два резистора, переменный и постоянный по 22-24 кОм каждый, соединенные последовательно.
В случае применения внешнего генератора, синхронизирующего работу двух и более каналов, частотозадающие резистор и конденсатор не устанавливаются, а выводы 4 микросхем подключаются к выходу внешнего генератора.
Как уже упоминалось, петля обратной связи по напряжению в данной схеме не используется, и на вход Vref (вывод 2) подается постоянное напряжение.
Переменным резистором устанавливают напряжение на выводе 1 более 3,5 вольт. В этом случае на инверсном входе компаратора контроля тока установится стабильное напряжение 1B. Таким образом компаратор контроля тока будет переключаться и выключать выходной ключ при напряжении 1 вольт на входе 3, т.е на измерительном резисторе Rs.
Величина Rs расчетная, она определяет пиковый ток в обмотке двигателя.
Сопротивление определяется по простой формуле R=1/Iобм.ном
Для тока 1 А резистор должен быть 1 Ом, для тока 2 А – 0,5 Ом, для тока 4 А – 0,25 Ом.
Напряжение питания двигателей можно увеличить до 40 и более вольт.
Вместо полевого транзистора можно применить «дарлингтоны» КТ829 или КТ972, при применении других транзисторов необходимо подобрать резисторы в базовой цепи.
При необходимости можно использовать напряжение +5 В на выводе 8 микросхемы UC3842 для питания микросхемы ТМ5(ТМ7) и синхронизирующего генератора, если таковые есть.
Если напряжение питания двигателей находится в пределах 16-36 вольт, микросхему UC3842 можно также питать этим напряжением.
При большем напряжении питания двигателей необходимо использовать добавочный резистор, включенный последовательно с выводом 7 микросхемы.
Величина резистора – 10 Ом на каждый вольт избыточного напряжения.
В этом случае вывод 7 соединяется с корпусом через конденсатор 200-500 мкф на напряжение 50 Вольт. Рекомендуется также установить дополнительный стабилитрон между выводом 7 и корпусом. Напряжение стабилизации – 30- 36 Вольт, ток стабилизации не менее 100 мА.
При напряжении питания менее 16 вольт микросхема UC3842 работать не будет.
Данную схему можно использовать с очень большими токами двигателей.
Необходимо только следить, чтобы ток не превысил допустимого значения для обмотки, ключей контроллера и выходного ключа стабилизатора тока.
В целях максимального использования скоростных возможностей двигателя рекомендуется для каждого типа двигателя подобрать частоту импульсов, напряжение питания (оно определит скорость нарастания тока) и оптимальный пиковый ток.
Минимальные обороты шагового двигателя. – Электропривод
Пост # 13 – станок 5822М … пост # 15 схема 5822 – как это? (схемы у них разные в основном по номерам аппратов и точек (проводов)
Описание эл схемы и паспорт 5822 можно скачать здесь ; схемы 5822м –здесь.НО неполностью – нет листа схемы привода изделя и перечня аппаратов. Если еще нужно что из документов, можно спросить здесь . (платные схемы – вроде в сети есть.)
—————————————————————————————————————–
АД (тип не указан) и редуктор (редукция не указана) –понятно…, а вентилятор на АД вместо крыльчатки? .обороты АД с учетом дипазона регулирования могут быть значительно ниже 700 . Мотор может работать продолжительно,, с учетом скорости шлифовки и числа проходов шлифования.
Шкалу указателя оборотов изделия (на 5822 в передней бабке) на пульте управления 22М желательно проверить на соответтсвие оборотам шпинделя изделия.
При отлаженной схеме надо кроме шлифования на проход (в 1 и 2ст) проверить режим затылования (метчики ..) и режим врезного, если эти режимы используются.
.——————————————————————————————————————————
Далее только для справки имхо
.. вроде работает – надо знать – каков диапазон оборотов iщпинделя изделия – минимал. и макс.Вроде и резьба получится…Если будет проводится контроль параметров шлифованной резьбы.
Диапазон регулирования оборотов шпинделя изделия – 0,3-43 Об/мин (12-1800 на валу мотора). Редукция от вала мотора (с учетом ременки) =40. Ускоренные – 100 (4000).
Привод изделия родной 5822м имет диапазон ок. 150. АД-ПЧ (редуктор) в бездатчиковом режиме (без энкодера на валу АД)- не более 50. (заявленные в нек титах ПЧи 100-200 не рассматриваю). Те – его как-то расширить можно лишь за счет повышения частоты ПЧ до 100 и более гц. Это регулирование при постоянной мощности и имеет свои пределы для мотора.
Паспортные данные станка 5822М – есть на сайте stanki-katalog и на сайте gig-ant
.Для 5822М : Вес ПСТ-53(м) – 41кг, АИР71в4 – 10кг . АИР7В4 –L30=271. АИР80А4 длина L30=300, вес 12кг
Момент пст53м- 4,1нм (у МИ-32фт 1500, 0,45квт 3нм) Момент АИР71В4 5-5,3Нм АИ80А4 7,8Нм (на фото – привод с синхронным мотором на ПБ)
Двигатель (АД) с векторным ПЧ в бездачиковом («бессенсорном») режиме обеспечивают номинал. момент в низкой части диапазона 1-4гц, но не обеспечивает hавномерного вращения при регулировании , особеннно в зоне низких оборотов,
Тк привод издели не только вращает изделие, но и обеспечивает продольный ход стола Неравномерность хода может сказаться на качестве шлифуемой резьбы, параметрах ее профиля. Неравномерность вращения шпинделя изделия – это неравномерная скорость резания.
Если добавлен редуктор, пусть с редукцией 2 то макс рабочую скорость (43об/мин ) на шпинделе можно получить только в режиме ослабления поля (F >50гц)..
МЗКРС – была одна из причин дроби (на поверхности резьбы) при сдаче станков (22М, 5К22В) – неисправность тахогенератора и отсутвие скрутки проводов тахо и регулятора оборотов). Механика: Балансировка мотора, класс вибрации (S лучше чем R )и его качество его установки тоже влияют.
Изменено пользователем витяЧто такое максимальная частота импульсов?
Что такое максимальная частота импульсов?- Фрезерно-гравировальныe станки
- Лазерные станки с ЧПУ
- Станок плазменной резки
- 3D Принтеры
- Покрасочный станок
- Комплектующие к ЧПУ
- Комплектующие для лазерных станков
- Комплектующие для волоконных лазеров
- Готовые модули
- Режущий инструмент
- Фрезы ARDEN для ручных и ЧПУ фрезеров
- Фрезы пазовые прямые
- Фрезы для выравнивания поверхности
- Фрезы V-образные
- Фрезы кромочные прямые
- Фрезы для врезания петель и замков
- Фрезы пазовые галтельные
- Фрезы радиусные полукруглые
- Фрезы “Ласточкин хвост”
- Фрезы пазовые
- Фрезы четвертные
- Фрезы профильные
- Фреза “Гусёк” (псевдофилёнка), 222 серия
- Фрезы “Гусёк” 210 серия
- Фрезы “Тройной внешний радиус”, 323 серия
- Фрезы “Декоративный гусёк” 212 серия
- Фрезы “Классический узор”, 211 серия
- Фрезы “Тройной внутренний радиус”, 324 серия
- Фрезы “Шар” 208 серия
- Фрезы Бычий нос “Катушка”, 330 серия
- Фрезы внешнее и внутреннее скругление 2 в 1
- Фрезы для скругления удлиненные
- Фрезы мультипрофильные (Карниз), 351 серия
- Фрезы овальное скругление (Жалюзи)
- Фрезы превсофиленка “Волна-1”
- Фрезы профильные “Ручка” 502 серии
- Фрезы профильные “Углубленный шар”, 329 серия
- Фрезы профильные “Французская классика”, 352 серия
- Фрезы профильные для плинтусов, 403 серия
- Фрезы фигурные “Классический гусёк”, 311 серия
- Фрезы филёночные, 416 серия
- Фрезы для сращивания и мебельной обвязки
- Комплектующие к фрезам ARDEN
- Набор радиальных и фасочных фрез
- Комплектующие для плазменной резки
- Пневматическое оборудование
- Дисковые пилы
- Оборудование для покраски
- Ручной инструмент
Шаговый Двигатель Nema 17 – 42 x 42mm
Шаговый двигатель Nema 17 представляет собой агрегат, размеры торца которого составляют 1,7х1,7 дюйма. В продаже можно найти моторы с одним либо двумя валами, с шагом 0,9 либо 1,8 градуса, а также с круговыми и нарезными механизмами. При необходимости устройство может быть произведено по индивидуальному заказу, поэтому его характеристики, в том числе скорость вращения, тип крепления и распиновка для подключения могут отличаться. Рабочее напряжение для питания устройства составляет 12 либо 24 вольта. Максимальная скорость вращения двигателя Nema 17 может составить до 2 тысяч оборотов. Такие устройства могут применяться в гравировальном оборудовании, 3D-принтерах, агрегатах для резки пленки и прочих станках.
Преимущества нашей продукции
Наш ассортимент имеет следующие плюсы:
- большой выбор лучших шаговых электродвигателей с различными характеристиками, в том числе аксессуарами, держателями и т. д.;
- драйверы для устройств;
- наличие моторов линейного и редукторного типов;
- большой выбор датчиков, а также двигателей в водонепроницаемом корпусе;
- высокое качество выпускаемых устройств, соответствующее мировым стандартам;
- более низкая цена на продукцию по сравнению с заводскими поставщиками;
- налаженная логистическая цепочка, которая позволяет выполнить местную доставку и возврат товаров.
При необходимости вы всегда можете связаться с нашим представителем для уточнения деталей. Специалист компании поможет сделать правильный выбор, ориентируясь на требования и пожелания клиента.
Информация для оплаты
Оплата может быть произведена несколькими способами:
- С использованием системы PayPal. Работа с этой платформой позволяет заказчику быстро и безопасно произвести мониторинг платежа, а также выполнить перевод с применением дебетовой, кредитной карточки либо банковского счета.
- С помощью кредитной карты. Если не хотите использовать PayPal, можно перевести деньги напрямую, но при этом нужно учитывать, что банк может дополнительно взимать комиссию за совершение платежа.
Чтобы купить товар, можно воспользоваться прямым банковским переводом. После того как заявка будет получена, наш специалист свяжется с заказчиком для уточнения деталей, а также предложит наиболее удобный вариант оплаты. Для связи с представителем STEPPERONLINE используйте мобильный номер телефона или специальную форму на сайте.
| Узнать Продукты Поставщики События Новости | Какова максимальная скорость шагового двигателя?Современные шаговые двигатели могут достигать скорости вращения до 1500 об / мин, учитывая, что кривая крутящего момента двигателя значительно уменьшается с увеличением частоты шага. Если винт диаметром 4 мм вращается со скоростью 1500 об / мин, мы получаем скорость перемещения 1500 * 4 мм = 6000 мм / мин или 6 м / мин. Поэтому на практике шаговые двигатели работают с максимальной скоростью 600 об / мин, потому что крутящий момент уменьшается выше этих значений.При каких температурах могут работать шаговые двигатели?Большинство шаговых двигателей имеют изоляцию класса B. Это позволяет внутренней проводке шагового двигателя выдерживать температуру до 130 градусов Цельсия. При температуре окружающей среды 40 Цельсия шаговый двигатель допускает превышение температуры 90 Цельсия. Шаговые двигатели могут работать непрерывно при этих температурах.Для каких приложений можно использовать биполярный шаговый двигатель?Биполярный шаговый двигатель лучше всего использовать в ситуации, когда требуется высокий крутящий момент на низких скоростях.В чем разница между униполярным и биполярным шаговым двигателем?Основное различие между униполярным и биполярным шаговыми двигателями заключается в центральных соединениях отвода. Униполярный двигатель намотан шестью выводами, каждый из которых имеет центральный отвод. Они будут использоваться в приложениях, требующих высокого крутящего момента при высокой скорости. В то время как биполярный шаговый двигатель имеет четыре выводных провода, но не имеет соединений с центральным ответвлением. Биполярные шаговые двигатели используются, когда вам требуется высокий крутящий момент на низких скоростях.Для каких приложений можно использовать униполярный шаговый двигатель?Униполярный шаговый двигатель лучше всего использовать в том случае, если вам потребуется двигатель с высокой скоростью и высоким крутящим моментом.Что такое шаговый двигатель?Шаговый двигатель – это бесщеточный электродвигатель постоянного тока, который делит полный оборот на ряд равных шагов. Двигатель может быть остановлен на любом из этапов без датчика обратной связи, если двигатель точно рассчитан для применения.Когда следует использовать микрошаг? Микрошаговый режимиспользуется в приложениях, требующих, чтобы двигатель работал со скоростью менее 700 PPS. При низкой частоте следования импульсов шаговые двигатели становятся менее плавными и часто вибрируют.Что такое униполярный шаговый двигатель?Униполярный шаговый двигатель – это один из двух основных типов двухфазных шаговых двигателей.Униполярный двигатель имеет одну обмотку с центральным отводом на фазу. Обычно центральный отвод делается общим, что дает три вывода на фазу и шесть выводов для типичного двухфазного двигателя. Обычно эти две общие фазы имеют внутреннее соединение, поэтому у двигателя пять выводов. Микроконтроллер или шаговый контроллер можно использовать для управления управляющими транзисторами в правильном порядке, что упрощает работу, делая униполярный шаговый двигатель самым дешевым способом получения точных угловых перемещений.Что такое биполярный шаговый двигатель?Биполярный шаговый двигатель – это тип двухфазного шагового двигателя, который имеет одну обмотку на фазу.Ток в обмотке этого типа двигателя необходимо реверсировать, чтобы перевернуть магнитный полюс, что значительно усложняет управление приводом на биполярных шаговых двигателях.Что такое шаговый двигатель?Шаговые двигатели – это двигатели постоянного тока, которые вращаются отдельными шагами. На каждом шаге двигатель удерживает свое положение без потребности в энергии, тем самым устраняя необходимость в датчиках позиционирования с обратной связью, пока двигатель имеет правильный размер и не пропущены никакие шаги. Устранение требований обратной связи и цифровая природа шагового двигателя упрощает интеграцию в цифровые системы.В чем разница между шаговыми и серводвигателями?Шаговые двигатели – это двигатели с постоянными магнитами, которые «делают шаг» на один шаг каждый раз, когда компьютер дает управляющей электронике один импульс. Этим двигателям не требуется обратная связь по положению (если они работают в своих пределах). При остановке они автоматически удерживают свою позицию. Серводвигатели – это двигатели постоянного тока с обратной связью энкодера. Компьютер считывает положение двигателя и контролирует мощность, подаваемую на двигатель. Серводвигатели движутся быстрее от точки к точке и лучше ускоряют тяжелую технику.У них больше мощности на высоких скоростях, чем у шагового двигателя, и они могут вращаться намного быстрее, обычно 3000-6000 об / мин. Шаговый двигатель обладает большой мощностью на низких оборотах, однако он не должен работать со скоростью более 800 об / мин, поскольку крутящий момент быстро падает. Сервосистема знает, где находится станок во время резки, и знает, находится ли двигатель под большой нагрузкой или заклинило ось, и останавливает станок. Шаговая система не имеет обратной связи и не знает, заклинило ли она или потеряла позицию. В этом аспекте сервопривод более надежен.Шаговые двигатели так же точны, как и сервоприводы, и, кроме того, они проще и не требуют обслуживания в суровых и / или пыльных условиях.Что такое резонанс шагового двигателя?Резонанс относится к нестабильному состоянию при работе шагового двигателя. Резонанс часто возникает при 2-4 об / сек, и во многих ситуациях его можно уменьшить, поместив нагрузку на двигатель, переключившись с полного шага на половинный или микрошаговый, и / или увеличив ускорение в зоне резонанса.Что такое контроллер шагового двигателя?Контроллер шагового двигателя, обычно называемый контроллером движения, представляет собой систему, которая управляет вращением двигателей с целью перемещения механического компонента в определенное положение.Контроллеры движения не следует путать с драйверами двигателей, которые являются силовым компонентом системы позиционирования. Лидируют те системы на базе ПК, которые через параллельный порт подают сигналы на двигатели.Почему шаговые двигатели теряют крутящий момент при увеличении скорости?Индуктивность и недостаток времени для накопления тока в обмотках – основная причина потери крутящего момента шаговых двигателей на высоких скоростях. Электрическая постоянная времени n – это количество времени, за которое обмотка двигателя заряжается до 63% от номинального значения при сопротивлении R и индуктивности L.При „= R / L на низких скоростях индуктивность не является проблемой, поскольку ток имеет время увеличиваться и достигать своего номинального значения, чтобы протекать через обмотки двигателя. Однако на высоких скоростях достаточный ток не может проходить через обмотки достаточно быстро, прежде чем ток будет переключен на следующую фазу, тем самым уменьшая крутящий момент, создаваемый двигателем.Можно ли получить больший крутящий момент, запустив шаговый двигатель с удвоенным номинальным током?Можно увеличить крутящий момент, увеличив ток, но это ослабит способность двигателя работать плавно, а также приведет к повышению температуры двигателя.Пожалуйста, не запускайте шаговый двигатель выше внутренней температуры, соответствующей его классу.Что делают стояночные тормоза на шаговом двигателе?Удерживающие тормоза не замедляют вал двигателя, а удерживают его на месте. Если на тормоз подается 24 В, тормоз «отпускается», и вал двигателя может свободно вращаться. Если на тормоз не подается 24 В, он блокирует положение и удерживает вал двигателя на месте.Если я приложу слишком большую нагрузку к шаговому двигателю, из-за чего вал перестанет вращаться, могу ли я повредить двигатель?№Шаговый двигатель просто остановится, а номинальный ток, которым управляет драйвер, все еще будет течь через катушки. В отличие от двигателя постоянного тока, ток не будет расти, когда шаговый двигатель остановлен.Какие типоразмеры бывают у шаговых двигателей с высоким крутящим моментом?Размеры нашей рамы NEMA варьируются от 08 до 42 для наших шаговых двигателей с высоким крутящим моментом.От чего защищен герметичный шаговый двигатель со степенью защиты IP65?IP65 – это степень защиты. Цифра 6 говорит нам, что он полностью защищен от пыли.Цифра 5 означает, что он устойчив к струям воды под любым углом.Какие условия окружающей среды идеально подходят для шаговых двигателей со степенью защиты IP65? Шаговые двигателисо степенью защиты IP65 для суровых условий окружающей среды. Эти шаговые двигатели со степенью защиты IP65 отвечают требованиям защиты от брызг для большинства приложений во влажной или влажной среде.Герметизированы ли валы шаговых двигателей со степенью защиты IP65?Да, герметичные валы обеспечивают дополнительную защиту шаговых двигателей, что увеличивает срок их службы.Можете ли вы предоставить нестандартный шаговый двигатель со степенью защиты IP65?Доступны специальные модификации вала, а также сумматоры кабеля, разъема и энкодера.Могут ли шаговые двигатели со степенью защиты IP65 иметь более высокий класс защиты IP?Да, они могут иметь более высокий рейтинг IP. Клиентам рекомендуется позвонить и обсудить требования приложения.Каковы преимущества использования шаговых двигателей?Скорость можно легко определить и контролировать, помня, что скорость равна шагам на оборот, деленным на частоту импульсов.2. Шаговый двигатель может совершать точные пошаговые движения. 3. Шаговый двигатель не требует обратной связи от энкодера (разомкнутый контур). 4. Некумулятивная ошибка позиционирования. 5. Отличные характеристики на низкой скорости / высоком крутящем моменте без редуктора. 6. Удерживающий момент шагового двигателя может использоваться для удержания нагрузки в неподвижном положении без перегрева. 7. Возможность работы в широком диапазоне скоростей. Как быстро я могу запустить шаговый двигатель?Большинство шаговых двигателей рассчитаны на работу на низкой скорости (3000 об / мин или меньше). Когда вы переходите на более высокие скорости, обычно используются серводвигатели.Насколько быстро работают наши шаговые двигатели?Большинство шаговых двигателей рассчитаны на работу на низкой скорости (3000 об / мин или меньше).Когда вы переходите на более высокие скорости, обычно используются серводвигатели.Какие шесть типов шаговых двигателей мы продаем?Шесть различных типов шаговых двигателей, которые мы продаем и продаем: это шаговые двигатели с высоким крутящим моментом (квадратные), стандартные (круглые) шаговые двигатели, шаговые двигатели с постоянным магнитом (PM), шаговые двигатели с уплотнением IP65, шаговые двигатели со встроенными драйверами и Шаговые двигатели со встроенными драйверами и контроллерами.Как можно подключить 4-проводные, 6-проводные и 8-проводные шаговые двигатели?Прежде всего, существуют два драйвера: униполярный и биполярный, униполярные приводы выводят сигнал на 6 выводов шагового двигателя, а биполярный вывод – на 4 вывода шагового двигателя.Таким образом, четырехполюсный двигатель можно подключить только к биполярному приводу. 6- и 8-выводный электродвигатели могут быть подключены либо к униполярному приводу, либо к биполярному приводу. На схеме подключения показаны возможные подключения.Сколько электрических фаз у шагового двигателя?Количество электрических фаз в шаговом двигателе определяется как количество используемых независимых обмоток.Какие шаговые двигатели совместимы с драйвером шагового двигателя DPD?Драйвер шагового двигателя совместим с шаговыми двигателями с высоким крутящим моментом, например, с нашими популярными 23Y, 34Y, 42Y.Или двигатели со стандартным крутящим моментом (с круглым корпусом): 23W, 34W, 23D, 34D и 42D.В чем разница между 4-проводным и 6-проводным шаговым двигателем?В чем разница между 4-проводным и 6-проводным шаговым двигателем?Сколько существует типов шаговых двигателей?Существует три различных типа шаговых двигателей: с постоянным магнитом, с переменным сопротивлением и гибридным.Почему глохнет мой шаговый двигатель?В некоторых случаях остановка шагового двигателя вызывает большой скачок напряжения, который часто повреждает фазовые транзисторы на драйвере.Некоторые драйверы предназначены для защиты от подобных ситуаций. В противном случае можно добавить устройства подавления переходных процессов. Проконсультируйтесь с заводом-изготовителем для получения дополнительной информации. |
Как определить число оборотов в минуту на шаговых двигателях
Обновлено 14 декабря 2020 г.
Кевин Бек
Шаговый двигатель, также называемый шаговым двигателем или шаговым двигателем, представляет собой тип двигателя, который вращается маленькими дискретными шагами, а не непрерывно, хотя невооруженным глазом такое вращение неотличимо от действительно плавного движения на большинстве скоростей.
Предположим, вы стояли в поле примерно в 200 ярдах от забора длиной 100 футов и наблюдали, как мяч плавно катился по верху забора с одной стороны на другую в течение трех секунд. А теперь представьте, что мяч не катился плавно, а вместо этого подпрыгивал с шагом 6 дюймов через вершину забора, также за три секунды. Ваши глаза, скорее всего, воспримут это пошаговое движение как непрерывное. Но в такой схеме тот, кто контролировал шагающий мяч, мог, при желании, остановить его в любой из 200 точных точек вдоль забора.
Так работают шаговые двигатели. Они сконструированы таким образом, что совершают один оборот на 360 градусов за серию шагов. 200 – это обычное количество шагов в этих двигателях, что делает каждый шаг 360/200 = 1,8 градуса. При необходимости механизм можно останавливать в очень точных точках, например, чтобы выйти из карусели не «где угодно», а в одном из 200 точных мест.
Расчет числа оборотов в минуту для шаговых двигателей
Шаговые двигатели оснащены цепями привода, которые излучают командные импульсы с определенной частотой, что напоминает электрический центр вашего сердца.Каждый импульс перемещает двигатель на один шаг, что означает, что «количество импульсов в секунду» переводится как «количество шагов в секунду». Количество шагов, необходимых для совершения одного полного оборота, варьируется, как отмечалось ранее.
Это означает, что количество оборотов в секунду равно:
\ frac {\ text {шагов в секунду}} {\ text {шагов на оборот}} = \ text {оборотов в секунду}
И количество оборотов в минуту, или об / мин, составляет:
60 \ frac {\ text {шаги в секунду}} {\ text {шаги на оборот}}
Пример
Допустим, у вас есть шаговый двигатель с частотой импульсов команды 30 в секунду и угол шага 0.72 градуса. Рассчитайте скорость вращения.
Сначала вычислите количество шагов за один оборот на 360 градусов:
\ frac {360} {0,72} = 500 \ text {steps}
Затем введите это в уравнение выше:
60 \ frac {30 } {500} = 60 (0,06) = 3,6 \ text {RPM}
Можно ли управлять шаговым двигателем со скоростью более 1000 об / мин?
Как я могу управлять шаговым двигателем со скоростью более 1000 об / мин?
Двигатель со скоростью 200 шагов на оборот, работающий со скоростью 1000 об / мин, должен иметь шаговый привод, способный выполнять полные шаги со скоростью 3.4 кГц, что находится в пределах диапазона большинства схем привода двигателя.
Однако имейте в виду, что если вы запустите двигатель на частоте 3,4 кГц, он будет просто вибрировать из-за инерции – вы не заводите машину со скоростью 60 миль в час, вы начинаете с 0 и разгоняетесь до 60 миль в час, в противном случае ты просто крутишь шины.
Итак, вы должны спроектировать свою схему так, чтобы частота повышалась с 0 до 3,4 кГц достаточно медленно, чтобы двигатель мог ее поддерживать. Это означает, что вам также придется учитывать всю трансмиссию – шаговый двигатель, шестерни, ремни и все остальное, что движется шаговый двигатель.Это может быть большая платформа, если вы работаете с ЧПУ, и инерция может потребовать очень медленного разгона, чтобы избежать пропуска шагов.
Наконец, если двигатель недостаточно мощный, чтобы перемещать нагрузку со скоростью 1000 об / мин, вам понадобится более мощный шаговый двигатель. Крутящий момент падает с увеличением скорости из-за внутренних потерь двигателя.
Какие факты о шаговых двигателях и какие принципы я должен учитывать при разработке схемы для достижения этой цели?
Gecko имеет приличное базовое введение в шаговые двигатели.Конструкция источника питания, согласование привода с двигателем, чтобы вы не теряли слишком много мощности из-за проблем с несоответствием, и т. Д., Описаны здесь в очень простых терминах. Как только вы поймете основы, задавайте более подробные вопросы для конкретных ответов.
Существуют ли какие-либо готовые альтернативы и схемы с открытым исходным кодом для решения этой задачи?
Если вы используете проект с низким энергопотреблением, в проекте RepRap есть несколько разумных драйверов шагового двигателя. С другой стороны, простой поиск в Google дает много информации о драйверах шагового двигателя с открытым исходным кодом.
Поскольку вы не предоставляете более подробной информации о том, что вы едете и какой двигатель используете, я не могу предложить ничего конкретного.
Должен ли я подходить к проектированию шаговых двигателей с редуктором и без него?
Не с точки зрения конструкции привода – единственное отличие состоит в том, что зубчатая передача увеличивает массу трансмиссии, что требует более медленного разгона.
Однако чем больше зубчатая передача, тем больше люфт вы можете испытать, поэтому механическая конструкция намного больше, если вам требуется точность скорости и .
Но конструкция шагового драйвера в обоих случаях одинакова.
Если вам нужна более высокая скорость и / или мощность, вам следует подумать о серводвигателях с ЧПУ, а не о шаговых двигателях.
Руководство по выбору шаговых двигателей
Два наиболее часто используемых типа шаговых двигателей – это двигатели с постоянным магнитом и гибридные двигатели. Вообще говоря, гибридный шаговый двигатель может быть лучшим выбором наряду со снижением стоимости, поскольку он обеспечивает лучшую производительность в отношении шагового разрешения, крутящего момента и скорости.
II. ВЫБОР ШАГОВОГО ДВИГАТЕЛЯ
Шаговый двигатель может быть хорошим выбором, когда требуется контролируемое движение. Их можно использовать в приложениях, где необходимо контролировать угол поворота, скорость, положение и синхронизм. Из-за присущих преимуществ, перечисленных ранее, шаговые двигатели нашли свое место во многих различных приложениях. Некоторые из них включают принтеры, плоттеры, столы X-Y, лазерные резаки, гравировальные машины, устройства для захвата и так далее.
При выборе шагового двигателя для вашего приложения необходимо учитывать несколько факторов:
- Как двигатель будет связан с нагрузкой?
- Как быстро груз должен двигаться или ускоряться?
- Какой крутящий момент требуется для перемещения груза?
- Какая степень точности требуется при позиционировании груза?
Фазы, полюса и углы шага
Обычно шаговые двигатели имеют две фазы, но также существуют трех- и пятифазные двигатели.Биполярный двигатель с двумя фазами имеет одну обмотку / фазу, а униполярный двигатель имеет одну обмотку с центральным отводом на фазу. Иногда шаговый двигатель называют «четырехфазным двигателем», хотя он имеет только две фазы. Двигатели с двумя отдельными обмотками на фазу могут работать как в биполярном, так и в униполярном режиме.
Полюс можно определить как одну из областей в намагниченном теле, где сосредоточена плотность магнитного потока. И ротор, и статор шагового двигателя имеют полюса.Шаговый двигатель гибридного типа имеет ротор с зубьями. Ротор разделен на две части, разделенные постоянным магнитом на половину южных полюсов зубцов и половину северных полюсов. Количество пар полюсов равно количеству зубьев на одной из половин ротора. Статор гибридного двигателя также имеет зубцы для создания большего количества эквивалентных полюсов (меньший шаг полюсов, количество эквивалентных полюсов = 360 / шаг зубьев) по сравнению с основными полюсами, на которые намотаны катушки обмотки. Обычно 4 основных полюса используются для 3.6 ° гибридов и 8 для типов 1,8 ° и 0,9 °.
Следующее уравнение показывает соотношение между количеством полюсов ротора, эквивалентными полюсами статора, количеством фаз и углом полного шага шагового двигателя.
Угол шага = 360 / (NPh / Ph) = 360 / N
Где:
NPh = Количество эквивалентных полюсов на фазу = количество полюсов ротора
Ph = Количество фаз
N = Общее количество полюсов для всех фаз вместе = NPh / Ph
Если шаг зубьев ротора и статора неравный, существует более сложная взаимосвязь.
Размер
Шаговые двигатели классифицируются не только по углу шага, но и по размеру корпуса, который соответствует размеру корпуса двигателя. Например, шаговый двигатель NEMA размера 11 имеет размер корпуса примерно 1,1 дюйма (28 мм). Подобным образом шаговый двигатель NEMA типоразмера 23 имеет размер корпуса 2,3 дюйма (57 мм) и т. Д. Однако длина корпуса может варьироваться от двигателя к двигателю в пределах одной и той же классификации размеров корпуса. Вообще говоря, доступный крутящий момент двигателя конкретного типоразмера будет увеличиваться с увеличением длины корпуса.
Крутящий момент
Выходной крутящий момент и мощность шагового двигателя зависят от размера двигателя, теплоотвода двигателя, рабочего цикла, обмотки двигателя и типа используемого привода. Если шаговый двигатель работает без нагрузки во всем диапазоне частот, одна или несколько точек резонанса собственных колебаний могут быть обнаружены звуком или датчиками вибрации. Полезный крутящий момент от шагового двигателя может быть резко снижен за счет резонансов. Следует избегать работы на резонансных частотах.Для уменьшения эффекта резонанса можно использовать внешнее демпфирование, дополнительную инерцию или микрошаговый привод.
В шаговом двигателе крутящий момент создается, когда магнитные потоки ротора и статора смещаются друг относительно друга. Интенсивность магнитного потока и, следовательно, крутящий момент пропорциональны количеству витков обмотки и току и обратно пропорциональны длине пути магнитного потока. По мере увеличения скорости вращения время, необходимое для повышения тока, становится значительной частью интервала между шаговыми импульсами.Это снижает средний уровень тока, поэтому крутящий момент будет падать на более высоких скоростях.
Разрешение и точность позиционирования
На разрешение и точность позиционирования системы шагового двигателя влияют несколько факторов: угол шагового двигателя (длина полного шага шагового двигателя), выбранный режим привода (полный шаг, полушаг или микрошаг) и скорость передачи. . Это означает, что существует несколько различных комбинаций, которые можно использовать для получения желаемого разрешения.Из-за этого проблема разрешения шаговой конструкции обычно может быть решена после определения размера двигателя и типа привода.
III. НОРМАЛЬНЫЕ ЭТАПЫ ВЫБОРА
1. Определение компонента приводного механизма
Определите механизм и требуемые характеристики. Во-первых, определите некоторые особенности конструкции, такие как механизм, приблизительные размеры, пройденное расстояние и период позиционирования.
2. Рассчитайте необходимое разрешение
Найдите разрешение, необходимое двигателю.Исходя из требуемого разрешения, определите, будет ли использоваться только мотор или мотор-редуктор. Однако, используя технологию микрошага, добиться необходимого разрешения становится очень легко.
3. Определите режим работы
Определите режим работы, который соответствует требуемым спецификациям. Найдите период ускорения (замедления) и рабочую частоту импульсов, чтобы рассчитать момент ускорения.
4. Рассчитайте требуемый крутящий момент
Рассчитайте крутящий момент нагрузки и крутящий момент ускорения и найдите требуемый крутящий момент, требуемый двигателем.
5. Выбрать мотор
Сделайте предварительный выбор двигателя в зависимости от требуемого крутящего момента. Определите двигатель, который будет использоваться, по характеристикам скорости-момента.
6. Проверить выбранный мотор
Подтвердите скорость ускорения / замедления и коэффициент инерции.
IV. ШАГОВЫЕ ДВИГАТЕЛИ ИЗДЕЛИЙ УПРАВЛЕНИЯ ДВИЖЕНИЕМ
ПродуктыMotion Control предлагают множество серий шаговых двигателей, таких как двухфазные шаговые двигатели и трехфазные шаговые двигатели (от типоразмера NEMA от 8 до 42).В наших шаговых двигателях используются передовые технологии из США, в которых используется высококачественная холоднокатаная медь и постоянный магнит, устойчивый к высоким температурам. Шаговые двигатели Motion Control отличаются высокой надежностью и малым нагревом. Благодаря своим внутренним характеристикам демпфирования наши шаговые двигатели могут работать очень плавно и не имеют явной области колебаний во всем диапазоне скоростей двигателей. В обзоре в формате PDF (который можно загрузить ниже) показаны типичные модели шаговых двигателей продуктов Motion Control.
2-4-3. Характеристики шаговых двигателей
На рис. 2.57 показана взаимосвязь между крутящим моментом и скоростью шагового двигателя, если взять крутящий момент по вертикальной оси и частоту импульсов по горизонтальной оси. На рисунке нарисованы две кривые. Они называются соответственно начальной характеристической кривой и непрерывной характеристической кривой.
Стартовые характеристики
Пусковые характеристики указывают уровень момента нагрузки, до которого двигатель в состоянии покоя может выдержать при запуске своей работы, когда на двигатель подаются импульсы постоянной частоты.Его также называют крутящий момент при втягивании характеристики . Максимальный крутящий момент шаговых двигателей обычно определяется как пусковой крутящий момент при частоте импульсов 10 Гц. Когда мы говорим о шаговых двигателях, термин частота импульсов обычно используется вместо частоты импульсов. А для единицы измерения pps (импульсы в секунду) вроде бы используются чаще, чем Гц.
Характеристики непрерывного действия
Непрерывная характеристика указывает уровень момента нагрузки, до которого двигатель может выдержать, продолжая свою работу, когда он работает с импульсами постоянной частоты.Эти характеристики также называются характеристиками крутящего момента поворота или характеристиками крутящего момента отрыва .
Значение непрерывной характеристики становится выше, чем значение пусковой характеристики.
Значения как пусковой, так и непрерывной характеристик падают с увеличением частоты импульсов.
Рис. 2.57 Нагрузочные характеристики шаговых двигателейЧастота, до которой двигатель может поддерживать непрерывную работу, называется максимальной частотой непрерывного отклика , а частота, до которой он может начать свою работу, называется максимальным импульсом втягивания . Оцените .
Крутящий момент шаговых двигателей уменьшается в области высоких скоростей, потому что электрический ток не течет легко на высоких частотах из-за индуктивности обмотки.
Пусковые и продолжительные характеристики шаговых двигателей различаются в зависимости от метода возбуждения и схемы привода. Следовательно, при оценке характеристик шаговых двигателей вы должны учитывать различные факторы, в том числе взаимосвязь со схемой привода.
<Короткая колонка> Удерживающий момент
Если внешняя сила приложена к шаговому двигателю, когда он остановлен, но находится под напряжением, сила притяжения, возникающая между ротором и статором, работает, чтобы поддерживать положение остановки двигателя.
Этот момент противостояния внешней силе называется удерживающим моментом.
<Короткая колонка> Момент фиксации
Из-за силы притяжения магнита ротора шаговые двигатели PM и HB имеют определенный уровень удерживающего момента, даже когда они не находятся под напряжением. Этот момент называется моментом фиксации.
Шаговый двигатель – обзор
Шаговый двигатель – это устройство, преобразующее постоянный ток. последовательность импульсов напряжения превращается в пропорциональное механическое вращение ее вала.Таким образом, шаговый двигатель работает и как привод, и как датчик положения. Дискретное движение шагового двигателя делает его идеально подходящим для использования с цифровой системой управления, такой как микрокомпьютер.
Скорость шагового двигателя можно изменять, изменяя частоту входной последовательности импульсов. Таким образом, если шаговый двигатель требует 48 импульсов для вращения на один полный оборот, тогда входной сигнал 96 импульсов в секунду заставит двигатель вращаться со скоростью 120 об / мин. На самом деле вращение осуществляется за конечные промежутки времени, но это визуально неразличимо на всех скоростях, кроме самых низких.
Принцип работы шагового двигателя можно проиллюстрировать на примере четырехфазной машины с переменным сопротивлением. Этот двигатель обычно имеет восемь зубцов статора и шесть зубцов ротора (см. Рисунок 2.57).
Рисунок 2.57. Шаговый двигатель с регулируемым сопротивлением
Если фаза 1 статора активирована отдельно, то два диаметрально противоположных зубца ротора совмещаются с зубцами фазы 1 статора. Следующий соседний набор зубцов ротора по часовой стрелке тогда на 15 ° не совпадает с зубьями статора.Активация обмотки фазы 2 сама по себе заставит ротор повернуться еще на 15 ° против часовой стрелки, чтобы выровнять соседнюю пару диаметрально противоположных зубцов ротора. Если обмотки статора возбуждаются в последовательности 1, 2, 3, 4, ротор будет двигаться последовательно с шагом 15 ° против часовой стрелки. Изменение последовательности возбуждения на обратное вызовет вращение ротора по часовой стрелке.
2.2.27.1 Терминология шагового двигателя
Момент отрыва : Максимальный крутящий момент, который может быть приложен к двигателю, работающему с заданной частотой шагов, без потери синхронизма.
Вращающий момент : Максимальный крутящий момент, при котором двигатель запускается с заданной частотой следования импульсов и достигает синхронизма без потери шага.
Динамический крутящий момент : крутящий момент, развиваемый двигателем при очень медленных шаговых скоростях.
Удерживающий момент : Максимальный крутящий момент, который может быть приложен к неподвижному двигателю под напряжением, не вызывая вращения шпинделя.
Скорость отрыва : максимальная скорость переключения, при которой двигатель будет оставаться в синхронизированном состоянии, в то время как скорость переключения постепенно увеличивается.
Скорость втягивания : максимальная скорость переключения, при которой нагруженный двигатель может запускаться без потери шагов.
Диапазон поворота : Диапазон скоростей переключения между включением и выключением, при котором двигатель будет работать синхронно, но не может запускаться или реверсировать.
Общие характеристики типичного шагового двигателя приведены на рисунке 2.58. Во время применения каждого последовательного импульса ротор шагового двигателя быстро ускоряется к новому положению шага.Однако при достижении нового положения будет некоторое перерегулирование и колебания, если не будет обеспечен достаточный тормозящий момент, чтобы предотвратить это. Эти колебания могут вызвать резонанс ротора на определенных частотах импульсов, что приведет к потере крутящего момента или, возможно, даже к условиям выдергивания. Поскольку двигатели с регулируемым магнитным сопротивлением обладают очень небольшим внутренним демпфированием, они более восприимчивы к резонансам, чем двигатели с постоянным магнитом или гибридные типы. Доступны механические и электронные демпферы, которые можно использовать для минимизации неблагоприятных эффектов резонанса ротора.Однако, если это вообще возможно, двигатель следует выбирать так, чтобы его резонансные частоты не были критичными для рассматриваемого приложения.
Рисунок 2.58. Характеристики шагового двигателя
Благодаря своим уникальным характеристикам шаговые двигатели широко используются в приложениях, включающих позиционирование, управление скоростью, синхронизацию и синхронизированное срабатывание. Они распространены в X-Y плоттерах, считывателях с перфолентой, приводах головок гибких дисков, приводах каретки принтера, приводах скольжения станков с числовым программным управлением и механизмах управления диафрагмой камеры.
Безусловно, самым серьезным ограничением чисто электрического шагового двигателя является его способность управлять мощностью. В настоящее время это ограничено примерно 2,25 кВт.
Скорость шага – обзор
2.5 Заключение
После достаточных тренировок двуногие смогли достичь ходьбы в течение длительных периодов времени, а также начинать и останавливаться по требованию. Однако наблюдение со стороны человека было необходимо всегда, поскольку каждые несколько минут происходили сбои, и двуногий падал без поддержки.Эти случайные падения стали происходить реже после дополнительных тренировок.
Наименьшая достижимая скорость шага была определена динамикой системы: двуногий не мог ходить с походкой, которая требовала длительности одиночной опоры, длительной по сравнению с постоянной времени эквивалентного перевернутого маятника. Это было прямым результатом архитектуры системы обучения, которая использовала модуляцию поперечного наклона и импульса для регулирования продолжительности одиночной поддержки. Длительная одиночная поддержка (более 0.5 с для этого двуногого) требует квазистатического равновесия относительно опорной стопы, по сути, балансировки на одной ноге без бокового импульса тела. В настоящее время мы включаем изученные возможности статической балансировки в общую архитектуру управления.
Как правило, балансировать легче при шагах выше, чем собственная частота эквивалентного перевернутого маятника. Быстрые шаги можно было легко достичь, если длина шага была короткой. Наивысшая достижимая скорость шага на практике ограничивалась доступным крутящим моментом двигателя и полосой пропускания последовательного канала связи между контроллерами высокого и низкого уровня.
Максимальная длина шага была ограничена архитектурой обучающей системы, в которой использовались разные стратегии для адаптивного регулирования баланса правый-левый и передний-задний. По мере увеличения длины шага относительное положение ступней становится более диагональным, а не из стороны в сторону, увеличивая связь между управлением балансом передней плоскости и боковой плоскости. В настоящее время мы расширяем нашу архитектуру управления обучением, чтобы обеспечить связь между фронтальной и боковой плоскостями в обучающих модулях, продолжая использовать простые несвязанные модели в модулях генератора походки и кинематики.
Хотя универсальная ходьба еще не достигнута, экспериментальный двуногий человек смог изучить кинематику замкнутой цепи, необходимую для перемещения веса тела из стороны в сторону, сохраняя при этом хороший контакт ступней, и смог изучить динамический баланс, необходимый в чтобы оторвать ногу от пола (посредством приложенного бокового импульса) на желаемый промежуток времени и для различных начальных условий, в течение которого ступня может быть перемещена в новое место относительно тела. Следуя практике под руководством человека, двуногие могли маршировать на месте и соединять короткие шаги, не падая (слишком часто).Двуногий контроллер полагался на простую эвристику походки, дополненную обучением нейронной сети. Детальных динамических моделей не использовалось. Иерархический контроллер реального времени был полностью реализован в операциях с фиксированной точкой на стандартных процессорах. Один процессор использовался для управления аппаратным интерфейсом и исполнительным механизмом, а один процессор использовался для управления походкой и вычислений нейронной сети. Двухпроцессорная конфигурация обладала достаточным резервом вычислительной мощности для логического расширения архитектуры управления.
Как механическая структура, двуногие было принципиально нестабильным, особенно в отношении движений вперед-назад. Кроме того, люфт коробки передач, накопленный последовательным расположением 10 мотор-редукторов, приводил к значительному колебанию конструкции, даже несмотря на то, что отдельные звенья были жесткими. В результате двуногие были чувствительны к неправильным позам и вибрациям, вызванным внезапными изменениями управляющих сигналов. Это делало его непригодным для управления с использованием чисто реактивного управления с ошибками.Хорошая производительность зависела от точного и плавного управления с прямой связью, которое обеспечивалось обучением нейронной сети вместо детального моделирования системы. Чтобы обеспечить плавность управляющих сигналов, обучение нейронной сети, предназначенное для улучшения двуногого баланса, использовалось для управления параметрами генератора фиксированной походки, а не для непосредственного изменения команд исполнительного механизма.
В нашем более раннем контроллере [16] генератор походки не был синхронизирован с естественной динамикой двуногого человека во время шага.В результате не удалось достичь связанных шагов, и максимальная успешная средняя скорость шага составила 30 шагов в минуту. В контроллере, о котором здесь говорится, сенсорные триггеры и обучение нейронной сети использовались для синхронизации генератора походки с естественной динамикой двуногого тела, создавая непрерывное плавное движение тела во время полностью связанных шагов. Примерно через 60 минут тренировки двуногий мог начинать и останавливаться по требованию, а также ходить непрерывным движением по плоской поверхности со скоростью до 100 шагов в минуту, с длиной шага до 6 см на шаг (12- см длины шага).
В опубликованном исследовании длина шага была задана оператором заранее и не адаптировалась. Контроллер выучил правильные временные последовательности поз тела, чтобы выполнять заданные шаги без падения. Это возможно только в том случае, если желаемое чистое ускорение тела невелико. Результаты, ранее опубликованные нашей лабораторией, включали имитационные исследования выученного положения стопы с использованием двумерных симуляторов двуногого тела [8, 14]. В исследованиях моделирования для обучения нейронной сети были объединены стандартное обучение с учителем и обучение с разницей во времени.Случайная тренировка с использованием частых внезапных изменений желаемой средней скорости тела позволила создать надежный контроллер, способный отслеживать внезапные изменения желаемой команды скорости тела и быстро приспосабливаться к неожиданным возмущениям. Наша следующая цель в экспериментах в реальном времени – соединить эту выученную стратегию размещения стопы с нашим текущим усвоенным контролем статического и динамического баланса во время шага, чтобы добиться эффективного передвижения.
Благодарности: Это исследование было частично поддержано грантом Агентства перспективных исследовательских проектов (гранты ONR N00014-92-J-1858 и N00014-95-1-1024).
