
Синхронный электродвигатель: характеристики, устройство и принцип действия
Синхронный электродвигатель – это устройство, преобразующее электрическую энергию в механическую. Его также можно использовать в качестве генератора. Чаще всего он применяется в компрессорах, прокатных станках, поршневых насосах и другом подобном оборудовании. Рассмотрим принцип действия синхронного электродвигателя, его характеристики и свойства.
Устройство синхронного электродвигателя
Строение агрегата данного вида типично. Двигатель состоит из:
- Неподвижной части (якорь или статор).
- Подвижной части (ротор или индуктор).
- Вентилятора.
- Контактных колец.
- Щеток.
- Возбудителя.
Статор представляет собой сердечник, состоящий из обмоток, который заключен в корпус. Индуктор комплектуется электромагнитами постоянного тока (полюсами). Конструкция индуктора может быть двух видов – явнополюсная и неявнополюсная.
Частота вращения ротора в синхронном двигателе равна частоте вращения магнитного поля. Независимо от подключаемой нагрузки частота ротора неизменна, так как число пар полюсов магнитного поля и ротора совпадают. Их взаимодействие обеспечивает постоянную угловую скорость, не зависящую от момента, приложенного к валу.
Принцип работы синхронного электродвигателя
Самые распространенные типы такого рода агрегатов – однофазный и трехфазный. Принцип работы синхронного электродвигателя в обоих случаях примерно одинаков. После подключения обмотки якоря к сети ротор остается неподвижным, в то время как постоянный ток поступает в обмотку возбуждения. Направление электромагнитного момента меняется дважды за время одного изменения напряжения. При значении среднего момента равном нулю, ротор под влиянием внешнего момента (механического воздействия) разгоняется до частоты, близкой по значению частоте вращения магнитного поля в зазоре, после чего двигатель переходит в синхронный режим.
В трехфазном устройстве проводники расположены под определенным углом относительно друг друга. В них возбуждается вращающееся с синхронной скоростью электромагнитное поле.
Разгон двигателя может осуществляться в двух режимах:
- Асинхронный. Обмотки индуктора замыкаются с помощью реостата. Вращающееся магнитное поле, возникающее при включении напряжения, пересекает короткозамкнутую обмотку, установленную на роторе. В ней индуцируются токи, взаимодействующие с вращающимся полем статора. По достижении синхронной скорости крутящий момент начинает уменьшаться и сводится к нулю после замыкания магнитного поля.
- С помощью вспомогательного двигателя. Для этого синхронный двигатель механически соединяется со вспомогательным (двигателем постоянного тока либо трехфазным индукционным двигателем). Постоянный ток подается только после того, как вращение двигателя достигает скорости, близкой к синхронной. Магнитное поле замыкается, и связь со вспомогательным двигателем прекращается.

Характеристики синхронного электродвигателя
Хотя асинхронные двигатели считаются более надежными и дешевыми, их синхронные «собратья» имеют некоторые преимущества и широко применяются в различных областях промышленности. К отличительным характеристикам синхронного электродвигателя можно отнести:
- Работу при высоком значении коэффициента мощности.
- Высокий КПД по сравнению с асинхронным устройством той же мощности.
- Сохранение нагрузочной способности даже при снижении напряжения в сети.
- Неизменность частоты вращения независимо от механической нагрузки на валу.
- Экономичность.
Синхронным двигателям также присущи некоторые недостатки:
- Достаточно сложная конструкция, делающая их производство дороже.
- Необходимость источника постоянного тока (возбудителя или выпрямителя).
- Сложность пуска.
- Необходимость корректировать угловую частоту вращения путем изменения частоты питающего напряжения.

Однако в некоторых случаях использование синхронных двигателей предпочтительнее:
- Для улучшения коэффициента мощности.
- В длительных технологических процессах, где нет необходимости в частых запусках и остановках.
Таким образом, «плюсы» двигателей такого типа значительно превосходят «минусы», поэтому на данный момент они высоко востребованы.
Изучив синхронный двигатель, устройство и принцип его действия и учтя условия, в которых он будет эксплуатироваться, вы сможете быстро и с легкостью подобрать оптимально подходящий для ваших целей тип агрегата (защищенный, закрытый, открытый) и использовать его с максимальной эффективностью.
устройство, принцип работы, режимы работы, пуск
В качестве устройства преобразования электрической энергии в механическую в промышленности и быту используется синхронный электродвигатель. В сравнении с другими типами электрических машин он получил меньшее распространение, но в отведенных сферах является незаменимым фаворитом. В чем особенность синхронных агрегатов и как их применяют на практике, мы рассмотрим в данной статье.
В чем особенность синхронных агрегатов и как их применяют на практике, мы рассмотрим в данной статье.
Устройство
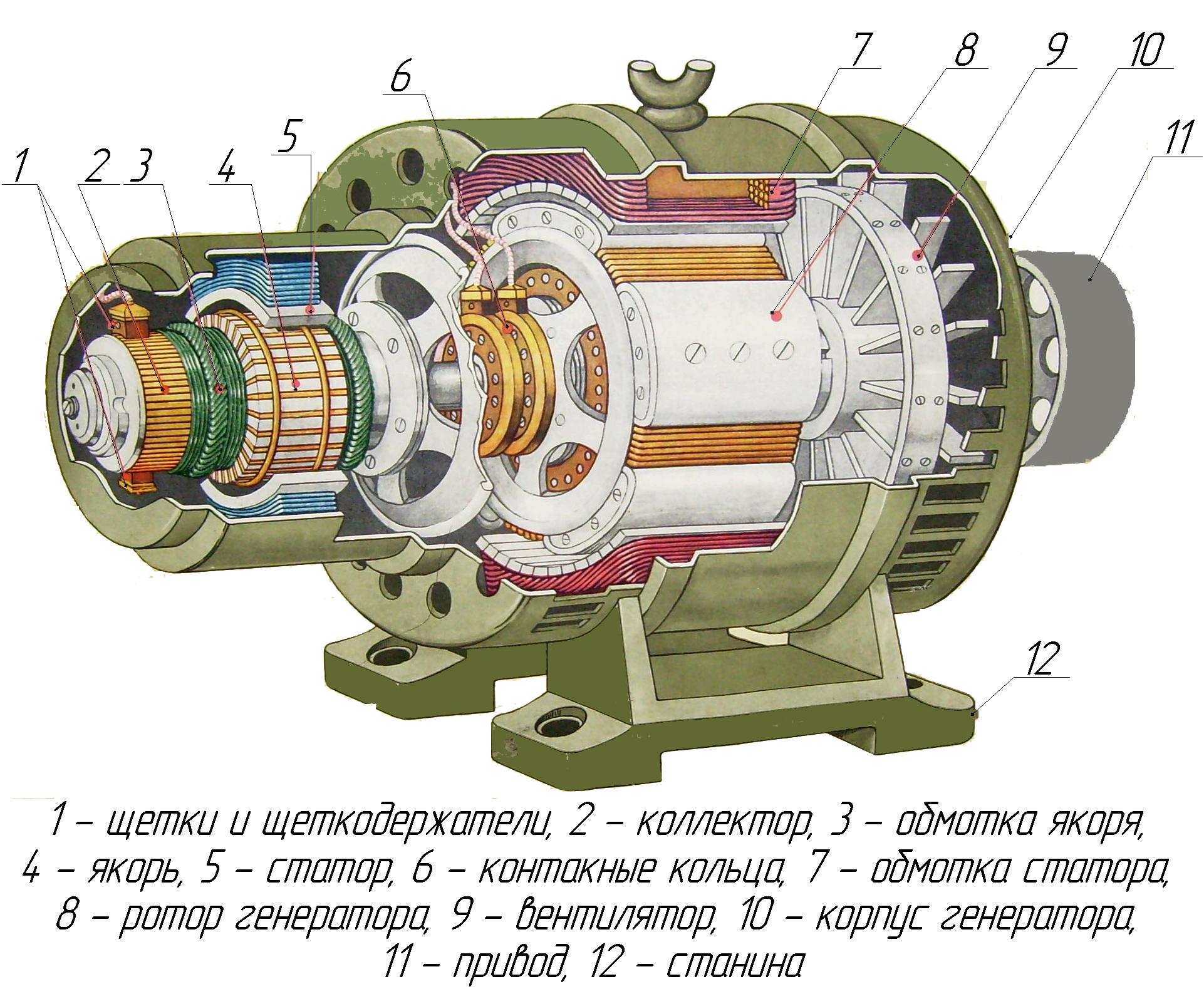
Конструктивно синхронный электродвигатель состоит из неподвижного элемента, подвижной части, обмоток различного назначения, может комплектоваться коллекторным узлом. Далее рассмотрим каждую составляющую синхронного агрегата более детально на рабочем примере (рисунок 1).
Рис. 1. Устройство синхронного электродвигателя- Статор или якорь – выполняется из электротехнической стали монолитным или наборным из шихтованного железа. Предназначен для размещения рабочей обмотки, проводит силовые линии электромагнитного поля, формируемого протекающими токами.
- Обмотка на статоре – изготавливается из медных проводников, в зависимости от типа статора синхронного электродвигателя может выполняться различными методами, способами намотки и расположения проводников. Применяется для подачи напряжения питания и формирования рабочего магнитного потока.

- Ротор с обмоткой возбуждения – предназначен для взаимодействия с магнитным полем статора. В результате подачи напряжения на обмотку возбуждения в роторе электродвигателя создается собственное магнитное поле, задающее состояние вращающегося элемента.
- Вал – используется для передачи вращательного усилия от электродвигателя к подключаемой к нему нагрузке. В большинстве случаев это основание, на котором крепиться шихтовка или полюса ротора, подшипники, кольца, пластины и другие вспомогательные элементы.
- Контактные кольца – применяются для подачи питания на обмотки ротора, но устанавливаются не во всех моделях синхронных агрегатов. Питание производиться через специальный преобразователь переменного напряжения в постоянное.
- Корпус – предназначен для защиты от воздействия внешних факторов, обеспечивает синхронному двигателю достаточную прочность и герметичность, в зависимости от условий его эксплуатации.

Принцип работы
В основе работы синхронного электродвигателя лежит взаимодействие магнитного потока, генерируемого рабочими обмотками с постоянным магнитным потоком. Наиболее распространенной моделью синхронной электрической машины является вариант с рабочей обмоткой на статоре и обмоткой возбуждения на роторе.
Рис. 2. Принцип действия синхронного электродвигателяКак видите на рисунке 2 выше, в обмотку статора подается трехфазное напряжение из сети, которое формирует переменное магнитное поле. На обмотки ротора электродвигателя подано постоянное напряжение, которое индуцирует такой же постоянный магнитный поток у полюсов. Для наглядности рассмотрим процесс на упрощенной модели синхронного агрегата (рисунок 3).
Рис. 3. Принцип формирования потоков в синхронной электрической машинеПри подаче питания на фазные витки статора электродвигателя первый пик амплитуды тока и ЭДС взаимоиндукции приходиться на фазу A, затем B и фазу C.
На графике показана периодичность чередования кривых в зависимости от времени:
- в точке 1 максимальная ЭДС EA формирует максимальный поток, а электродвижущие силы фаз EB и EC равны между собой и противоположны по знаку, они дополняют результирующую силу.

- в точке 2 пика достигает ЭДС EB, а электродвижущие силы фаз EA и EC становятся равны между собой и противоположны по знаку, они дополняют результирующую силу, в результате чего магнитное поле совершает вращательное движение.
- в точке 3 максимум приходиться на ЭДС EC, а электродвижущие силы фаз EB и EA вместе дополняют результирующую силу и снова смещают вектор поля по часовой стрелке.
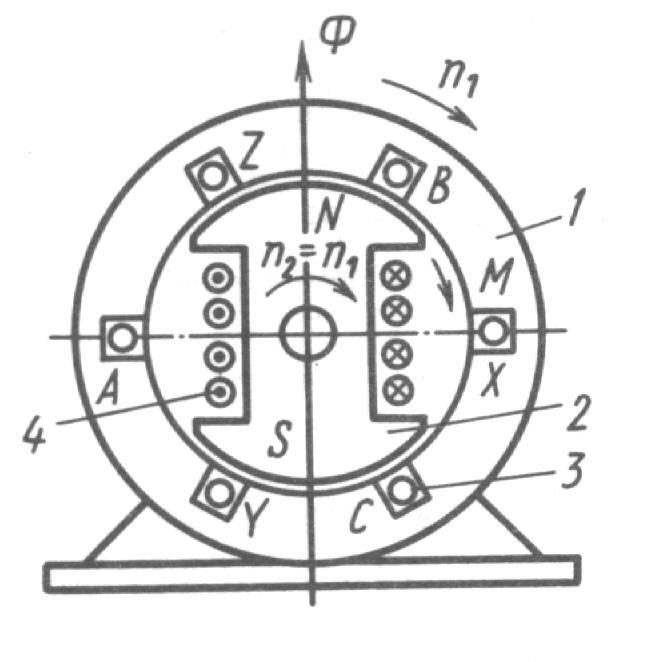
Оборот поля статора происходит в течении периода, а за счет того, что ротор обладает собственным электромагнитным усилием постоянным во времени, то он синхронно следует за движением переменного магнитного поля, вращаясь вокруг заданной оси. В результате такого вращения происходит синхронное движение ротора вслед за сменой амплитуды ЭДС в витках рабочих обмоток, за счет этого явления электродвигатель и получил название синхронного. Наличие отдельного питания отразилось и на схематическом обозначении таких электрических машин (рисунок 4) в соответствии с ГОСТ 2. 722-68.
722-68.
Отличие от асинхронного двигателя
Основным отличием синхронного электродвигателя от асинхронного заключается в принципе преобразования электрической энергии в механическое вращение. У синхронного электродвигателя процесс вращения ротора идентичен вращению рабочего электромагнитного поля, вырабатываемого трехфазной сетью. А вот у асинхронного рабочее поле самостоятельно наводит ЭДС в роторе, которая уже затем вырабатывает собственный поток взаимоиндукции и приводит вал во вращение. В результате чего асинхронные электрические машины получают разность во вращении рабочего поля и нагрузки на валу, что выражается физической величиной – скольжением.
В работе классические модели асинхронных электродвигателей с короткозамкнутым ротором:
- плохо переносят перегрузки;
- имеют сложности пуска со значительным усилием;
- меняют скорость вращения, в зависимости от нагруженности рабочего органа.

В некоторой степени эти недостатки преодолевает асинхронный двигатель с фазным ротором, но в полной мере избавиться от недостатков получается лишь синхронному агрегату.
Рис. 5. Отличие асинхронного от синхронного электродвигателяРазновидности
В современной промышленности и бытовых приборах синхронные электродвигатели используются для решения самых разнообразных задач. Как результат, существенно разнятся и их конструктивные особенности. На практике выделяют несколько критериев, по которым разделяются виды синхронных агрегатов. В соответствии с ГОСТ 16264.2-85 могут подразделяться по таким техническим характеристикам:
- питающему напряжению;
- частоте рабочего напряжения;
- количеству оборотов.
В зависимости от способа получения поля ротора выделяют такие типы синхронных электродвигателей:
- С обмоткой возбуждения на роторе – синхронизирующее усилие создается за счет подачи питания от преобразователя.
- С магнитным ротором – на валу устанавливается постоянный магнит, выполняющий те же функции, что и обмотка возбуждении, но без необходимости подпитки (см. рисунок 6).
С реактивным ротором — конструкция выполнена таким образом, что в его сердечнике происходит преломление магнитных линий, приводящее всю конструкцию в движение (см. рисунок 7). Под воздействием силового поля поперечные и продольные составляющие в роторе не равны за счет чего пластины поворачиваются вслед за полем.
Рис. 7. Пример реактивного ротораВ зависимости от наличия полюсов все синхронные электродвигатели можно подразделить на:
- явнополюсные – в конструкции четко видны обособленные полюса с обмотками, применяются для малых скоростей;
- неявнополюсные – полюс не выделяется, такие модели устанавливают для высоких скоростей;
В зависимости от расположения рабочих обмоток различают прямые (на статоре) и обращенные (рабочие обмотки на роторе).
Режимы работы
Большинство электрических машин обладают обратимой функцией, не составляют исключения и синхронные агрегаты. Их также можно использовать в качестве электрического привода или в качестве генератора, вырабатывающего электроэнергию. Оба режима отличаются способом воздействия на электрическую машину – подачу напряжения на рабочие обмотки или приведение в движение ротора за счет механического усилия.
Генераторный режим
Для производства электроэнергии в сеть используются именно синхронные генераторы. В большинстве случаев для этой цели используются электрические машины с фазными обмотками на статоре, что существенно упрощает процесс съема мощности и дальнейшей передачи ее в сеть. Физически генерация происходит при воздействии электромагнитного поля обмотки возбуждения синхронного генератора с обмотками статора. Силовые линии поочередно пересекают фазные витки и наводят в них ЭДС взаимоиндукции, в результате чего на клеммных выводах возникает напряжение.
Частота получаемого напряжения напрямую зависит от скорости вращения вала и вычисляется по формуле:
f = (n*p)/60 ,
где n – скорость вращения вала, измеряемая в оборотах за минуту, p – количество пар полюсов.
Синхронный компенсатор
В виду физических особенностей синхронного электродвигателя при холостом ходе аппарата он потребляет из сети реактивную мощность, что позволяет существенно улучшить cosφ системы, практически приближая его к 1.На практике режим синхронного компенсатора используется как для улучшения коэффициента мощности, так и для стабилизации параметров напряжения сети.
Двигательный режим
В синхронной машине двигательный режим осуществляется при подаче рабочего трехфазного напряжения на обмотки якоря. После чего электромагнитное поле якоря начинает толкать магнитное поле ротора, и вал приходит во вращение. Однако на практике двигательный режим осуществляется не так просто, так как мощные агрегаты не могут самостоятельно набрать необходимый ресурс скорости. Поэтому во время запуска используют специальные методы и схемы подключения.
Поэтому во время запуска используют специальные методы и схемы подключения.
Способы пуска и схемы подключения
Для запуска синхронного электродвигателя требуется дополнительное поле, независимое от воздействия сети. В то же время, на стартовом этапе запуск представляет собой асинхронный процесс, пока агрегат не достигнет синхронной скорости.
Рис. 8. Схема пуска синхронного двигателя
При подаче напряжения на якорь возникает ток в его обмотках и генерация ЭДС в железе ротора, который обеспечивает асинхронное движение до того момента, пока не начнется питание обмоток возбуждения.
Еще одним распространенным вариантом пуска является использование дополнительных генераторов, которые могут располагаться на валу или устанавливаться отдельно. Такой метод обеспечивает дополнительное стартовое усилие за счет стороннего крутящего момента.
Рис. 9. Генераторный способ пуска синхронного двигателяКак видите на рисунке 9, начальное вращение мотора М осуществляется за счет генератора G, который призван вывести устройство на подсинхронную скорость. Затем генератор выводится из рабочей цепи путем размыкания контактов КМ или автоматически при установке рабочих характеристик. Дальнейшее поддержание синхронного режима происходит за счет подачи постоянного напряжения в обмотку возбуждения.
Затем генератор выводится из рабочей цепи путем размыкания контактов КМ или автоматически при установке рабочих характеристик. Дальнейшее поддержание синхронного режима происходит за счет подачи постоянного напряжения в обмотку возбуждения.
Помимо этого на практике используется схема пуска с полупроводниковыми преобразователями. На рисунке 10 приведен способ тиристорного преобразователя и с установкой вращающихся выпрямителей.
Рис. 10. Тиристорная схема пуска синхронного двигателяВ первом случае запуск синхронного электродвигателя характеризуется нулевым напряжением от преобразователя UD. За счет ЭДС скольжения через стабилитроны VD осуществляется открытие тиристоров VS. В цепь обмотки возбуждения вводится резистор R, предназначенный для предотвращения пробоя изоляции. По мере разгона электродвигателя ЭДС скольжения пропорционально снизится и произойдет запирание стабилитронов VD, цепочка заблокируется, и обмотка возбуждения получит питание постоянным напряжением через UD.
Применение
Область применения синхронных электрических машин охватывает производство электрической энергии на электростанциях. По видам генераторы подразделяются на турбинные, дизельные и гидравлические, в зависимости от способа приведения их во вращение.
Также их используют в качестве электродвигателей, которые могут переносить существенные перегрузки в процессе эксплуатации. Такие двигатели устанавливаются на вентиляторах, компрессорах, силовых агрегатах и прочем оборудовании. Отдельная категория электродвигателей применяется в точном оборудовании, где важна синхронизация операций и процессов.
Преимущества и недостатки
К преимуществам такого электродвигателя следует отнести:
- высокий cosφ, приближающийся по величине к 1, что в значительной мере превосходит асинхронные электродвигатели;
- более высокая механическая прочность за счет особенностей конструкции электродвигателя;
- зависимость момента вращения от напряжения линейная, а не квадратичная, поэтому колебания электродвигателя пропорционально снижаются;
- на валу электродвигателя присутствует постоянная скорость, не зависящая от прикладываемой нагрузки;
- может применяться для уменьшения реактивной составляющей в сети.

Среди недостатков синхронных электродвигателей выделяют:
- сложную конструкцию;
- более сложный пуск;
- необходимость использования вспомогательных устройств и блоков;
- такие электродвигатели сложнее регулировать по числу оборотов;
- ремонт и обслуживание также обойдется дороже, чем асинхронные электродвигатели.
Видео версия
Библиографический список
- Ю.
 А. Макаричев, В.Н. Овсянников «Синхронные машины» 2010
А. Макаричев, В.Н. Овсянников «Синхронные машины» 2010 - Абрамович Б.Н., Круглый А.А. «Возбуждение, регулирование и устойчивость синхронных двигателей» 1983
- Андреева Е.Г., Морозова Н.С. «Синхронные машины» 2015
- Глебов И.А. «Проблемы пуска сверхмощных синхронных маши» 1988
- Емец В.Ф., Попков А.А., Петров Г.А. «Синхронные электрические машины» 2009
- Кислицын А.Л. «Синхронные машины» 2000
Трехфазный синхронный двигатель – Большая Энциклопедия Нефти и Газа, статья, страница 2
Трехфазный синхронный двигатель
Cтраница 2
Задача 13.4. Трехфазный синхронный двигатель работает от сети напряжением U 500 в. [16]
Так работают трехфазные синхронные двигатели. [17]
Как устроен трехфазный синхронный двигатель. [18]
Приемник представляет собой трехфазный синхронный двигатель с вращающимся двухполюсным постоянным магнитом. Обмотка статора – трехфазная катушечная с тремя явно выраженными полюсами, а ротор 7 электродвигателя – это постоянный двухполюсный магнит. Вращение ротора передается счетному механизму спидометра.
[20]
Обмотка статора – трехфазная катушечная с тремя явно выраженными полюсами, а ротор 7 электродвигателя – это постоянный двухполюсный магнит. Вращение ротора передается счетному механизму спидометра.
[20]
Приемник – малый трехфазный синхронный двигатель с ротором в виде постоянного магнита, дополненного для улучшения пусковых характеристик гистерезисным диском, приводит во вращение обойму постоянных магнитов, между полюсами которых расположен увлекаемый диск. Для компенсации температурной погрешности на полюсах магнитов установлен термомагнитный шунт, а диск изготовлен из тройного медно-алюми-ние-марганцовистого сплава с малым температурным коэффициентом сопротивления. [21]
Статорные обмотки трехфазного синхронного двигателя MS ( рис. 5.4) подключены к выходным зажимам преобразователя частоты с непосредственной связью НПЧ. Этот преобразователь выполнен на трех реверсивных управляемых выпрямителях UZA, UZB и UZC, работающих в режиме управляемых источников тока. Контуры регулирования токов фаз статора настраиваются идентично друг другу, соответствуют функциональной схеме ( рис. 5.5) и на рис. 5.4 для краткости не указаны. Цепь ротора MS подключена к источнику постоянного нерегулируемого напряжения.
[22]
Контуры регулирования токов фаз статора настраиваются идентично друг другу, соответствуют функциональной схеме ( рис. 5.5) и на рис. 5.4 для краткости не указаны. Цепь ротора MS подключена к источнику постоянного нерегулируемого напряжения.
[22]
Схема включения трехфазного синхронного двигателя обычного исполнения приведена на рис. 55.36, а. Статор синхронного двигателя СД выполняется аналогично статору асинхронного двигателя и имеет трехфазную обмотку, подключаемую к сети переменного тока. Ротор СД имеет обмотки возбуждения и пусковую в виде беличьей клетки, предназначенную для пуска синхронного двигателя. Конструктивно ротор синхронного двигателя может быть выполнен явнополюсным и не-явнополюсным в виде цилиндра. В качестве источника для питания обмотки возбуждения СД используется отдельный генератор постоянного тока ( возбудитель) В. Ток / в в обмотки возбуждения возбудителя ОВВ может регулироваться с помощью добавочного резистора RB. В регулируемом ЭП ротор синхронных двигателей может выполняться в виде постоянных магнитов или быть пассивным.
[23]
В регулируемом ЭП ротор синхронных двигателей может выполняться в виде постоянных магнитов или быть пассивным.
[23]
Двигатель-генераторный агрегат состоит из трехфазного синхронного двигателя и генератора постоянного тока. [24]
Для вращения модулирующего диска использован трехфазный синхронный двигатель, построенный по принципу бесконтактного сельсина и имеющий скорость 3000 об / мин. Так как модулирующий диск, являющийся ротором двигателя, имеет 9 отверстий, то частота модуляции составляет 450 гц. [25]
Рассмотренное устройство поясняет принцип действия трехфазных синхронных двигателей Греческое слово синхронный означает одновременный. [26]
Рассмотренное устройство поясняет принцип действия трехфазных синхронных двигателей. Греческое слово синхронный означает одновременный. Этим словом подчеркивается одинаковая скорость вращающегося поля и ротора.
[27]
Греческое слово синхронный означает одновременный. Этим словом подчеркивается одинаковая скорость вращающегося поля и ротора.
[27]
На рис. 9 приводятся рабочие характеристики трехфазного синхронного двигателя с гармоническим ротором. [29]
В чем заключается главная отличительная особенность работы перевозбужденного трехфазного синхронного двигателя от недовоз-бужденного. [30]
Страницы: 1 2 3 4
Синхронные электродвигатели
Заводы производители синхронных электродвигателей: Элсиб, WEG, VEM, Силовые машины – завод Реостат, ELSIB, Русэлпром
Серии двигателей: ДС, ДСЗ, СД2, СДН, СДНЗ, СДС, СДМ, СДВ, СДП, СДР, IE4, P21R, Wmagnet
Применение
Синхронный электродвигатель (СД) – это устройство, работающее в сети переменного тока. У синхронной машины частота вращения ротора соответствует частоте вращения магнитного поля. При выборе электродвигателя необходимо проконсультироваться с заводом производителем.
У синхронной машины частота вращения ротора соответствует частоте вращения магнитного поля. При выборе электродвигателя необходимо проконсультироваться с заводом производителем.
СД используются, где пуск и остановка происходят достаточно редко (конвейеры и т.д.), то есть двигатели работают круглосуточно достаточно долгое время. Работа в таких условиях объясняется тем, что синхронные двигатели работают с cos φ приближенном к 1, и могут выдавать реактивную мощность в сеть, в результате чего улучшается коэффициент мощности сети и снижается её потребление, что важно для предприятий.
Синхронные электродвигатели нашли широкое применение в металлургической и металлообрабатывающей промышленности, на объектах нефтедобычи, на насосных станциях городских водоканалов, в целлюлознобумажной промышленности и других отраслях.
Применение синхронных двигателей для привода:
- мощных вентиляторов
- мельниц
- конвейеров
- эксгаустеров
- компрессоров
- дробилок
Цена на синхронные электродвигатели зависит от типа двигателя, а также от:
- Параметров мощности
- Габарита двигателя(высоты оси вращения)
- Конструктивных особенностей
Преимущества синхронных электродвигателей:
- возможность регулирования реактивного тока
- скорость вращения стабильна при перегрузках и просадках, в пределах перегрузочной способности
- устойчивость к колебаниям сетевого напряжения, а также хорошая нагрузочная способность
Устройство синхронного двигателя
Принцип действия СД основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Синхронный электродвигатель состоит из двух основных частей:
- Статора (якорь) – в этой части двигателя расположены обмотки
- Ротора (индуктор) – в этой части СД устанавливают обмотку возбуждения или постоянные магниты.
Чем отличается синхронный электродвигатель от асинхронного? Главное отличие в роторе двигателя – синхронный двигатель имеет в наличии обмотки на якоре, а асинхронный не имеет.
Типы синхронных электродвигателей
§89. Синхронный двигатель, принцип действия и устройство синхронного двигателя
Синхронный двигатель. Принцип действия и устройство. Синхронный двигатель может работать в качестве генератора и двигателя. Синхронный двигатель выполнен так же, как и синхронный генератор. Его обмотка якоря I (рис. 291, а) подключена к источнику трехфазного переменного тока; в обмотку возбуждения 2 подается от постороннего источника постоянный ток. Благодаря взаимодействию вращающегося магнитного поля 4, созданного трехфазной обмоткой якоря, и поля, созданного обмоткой возбуждения, возникает электромагнитный момент М (рис. 291,б), приводящий ротор 3 во вращение. Однако в синхронном двигателе в отличие от асинхронного ротор будет разгоняться до частоты вращения n = n1, с которой вращается магнитное поле (до синхронной частоты вращения). Объяс-
Благодаря взаимодействию вращающегося магнитного поля 4, созданного трехфазной обмоткой якоря, и поля, созданного обмоткой возбуждения, возникает электромагнитный момент М (рис. 291,б), приводящий ротор 3 во вращение. Однако в синхронном двигателе в отличие от асинхронного ротор будет разгоняться до частоты вращения n = n1, с которой вращается магнитное поле (до синхронной частоты вращения). Объяс-
Рис. 291. Электрическая (а) и электромагнитная (б) схемы синхронного электродвигателя
няется это тем, что ток в обмотку ротора подается от постороннего источника, а не индуцируется в нем магнитным полем статора и, следовательно, не зависит от частоты вращения вала двигателя. Характерной особенностью синхронного двигателя является постоянная частота вращения его ротора независимо от нагрузки.
Электромагнитный момент. Электромагнитный момент в синхронном двигателе возникает в результате взаимодействия магнитного потока ротора (потока возбуждения Фв) с вращающимся магнитным полем, создаваемым трехфазным током, протекающим по обмотке якоря (потоком якоря Фв). При холостом ходе машины оси магнитных полей статора и ротора совпадают (рис. 292,а). Поэтому электромагнитные силы I, возникающие между «полюсами» статора и полюсами ротора, направлены радиально (рис. 292, б) и электромагнитный момент машины равен нулю. При работе машины в двигательном режиме (рис. 292, в и г) ее ротор под действием приложенного к валу внешнего нагрузочного момента Мвн смещается на некоторый угол 0 против направления вращения. В этом случае в результате электромагнитного взаимодействия между ротором и статором создаются электромагнитные силы I, направленные по направлению вращения, т. е. образуется вращающий электромагнитный момент М, который стремится преодолеть действие внешнего момента Мвн. Максимум момента Мmax
При холостом ходе машины оси магнитных полей статора и ротора совпадают (рис. 292,а). Поэтому электромагнитные силы I, возникающие между «полюсами» статора и полюсами ротора, направлены радиально (рис. 292, б) и электромагнитный момент машины равен нулю. При работе машины в двигательном режиме (рис. 292, в и г) ее ротор под действием приложенного к валу внешнего нагрузочного момента Мвн смещается на некоторый угол 0 против направления вращения. В этом случае в результате электромагнитного взаимодействия между ротором и статором создаются электромагнитные силы I, направленные по направлению вращения, т. е. образуется вращающий электромагнитный момент М, который стремится преодолеть действие внешнего момента Мвн. Максимум момента Мmax
соответствует углу ? = 90°, когда оси полюсов ротора расположены между осями «полюсов» статора.
Если нагрузочный момент Мвн, приложенный к валу электродвигателя, станет больше Мmax, то двигатель под действием внешнего момента Мвн останавливается; при этом по обмотке якоря неподвижного двигателя будет протекать очень большой ток. Этот режим называется выпаданием из синхронизма, он является аварийным и не должен допускаться.
Этот режим называется выпаданием из синхронизма, он является аварийным и не должен допускаться.
При работе машины в генераторном режиме (рис. 292, д и е) ротор под действием приложенного к валу внешнего момента Мвн смещается на угол ? по направлению вращения. При этом создаются электромагнитные силы, направленные против вращения, т. е. образуется тормозной электромагнитный момент М. Таким образом, при изменении значения и направления внешнего момента на валу ротора Мвн изменяется лишь угол ? между осями полей статора и ротора, в то время как в асинхронной машине в этом случае изменяется частота вращения ротора.
Пуск в ход и регулирование частоты вращения. Синхронный двигатель не имеет начального пускового момента. Если подключить обмотку якоря к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока электромагнитный момент будет дважды менять свое направление, т. е. средний момент за период будет равен нулю. Следовательно, для пуска в ход синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной. Для этой цели применяют метод асинхронного пуска. Синхронный двигатель пускают в ход как асинхронный, для чего его снабжают специальной короткозамкнутой пусковой обмоткой 3 (рис. 293). В полюсные наконечники ротора 2 синхронного двигателя закладывают медные или латунные стержни, замкнутые накоротко двумя торцовыми кольцами. Пусковая обмотка выполнена подобно беличьей клетке асинхронной машины, но занимает лишь часть окружности ротора. В некоторых двигателях специальная короткозамкнутая обмотка
е. средний момент за период будет равен нулю. Следовательно, для пуска в ход синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной. Для этой цели применяют метод асинхронного пуска. Синхронный двигатель пускают в ход как асинхронный, для чего его снабжают специальной короткозамкнутой пусковой обмоткой 3 (рис. 293). В полюсные наконечники ротора 2 синхронного двигателя закладывают медные или латунные стержни, замкнутые накоротко двумя торцовыми кольцами. Пусковая обмотка выполнена подобно беличьей клетке асинхронной машины, но занимает лишь часть окружности ротора. В некоторых двигателях специальная короткозамкнутая обмотка
Рис. 292. Электромагнитный момент в синхронной машине, образующийся в различных режимах
Рис. 293. Схема асинхронного пуска синхронного двигателя;
Рис. 294 Устройство пусковой обмотки синхронного двигателя: 1 — ротор; 2 — стержни; 3 — кольцо; 4 — обмотка возбуждения
Синхронный двигатель | Электротехника
Принцип действия синхронного двигателя.
Так как синхронная машина обладает свойством обратимости, конструкция двигателя практически не отличается от конструкции синхронного генератора. Однако взаимодействие элементов теперь отвечает принципу действия двигателя.
Электрическая активная мощность Р потребляется из сети, в результате чего по обмоткам статора протекает ток. Ток, как и в генераторе, создаёт МДС Fст, а она – потоки Фd и Фр,я, наводящие в обмотке статора ЭДС и .
По обмотке ротора протекает ток возбуждения Iв, её МДС Fв создаёт магнитный поток ротора Ф0. Вращаясь вместе с ротором, поток Ф0 в соответствии с законом электромагнитной индукции (ЭМИ) индуцирует в обмотке статора ЭДС , которая направлена против напряжения сети . Сумма ЭДС с учётом падения напряжения на активном сопротивлении обмотки статора уравновешивает напряжение сети . Магнитные потоки Ф0, Фd и Фр,я образуют результирующий магнитный поток двигателя Фрез.
Магнитные потоки Ф0, Фd и Фр,я образуют результирующий магнитный поток двигателя Фрез.
Вал двигателя сцеплён с валом рабочей машины РМ (например, со шпинделем металлорежущего станка), потребляющей механическую энергию и создающей момент сопротивления Мс. В результате действия тормозящего момента Мс полюсы ротора отстают от полюсов результирующего поля статора (см. рис. 4.6).
В двигательном режиме результирующий магнитный поток двигателя Фрез является ведущим; вращаясь, он увлекает за собой ротор, создавая вращающий момент М двигателя, преодолевающий тормозной момент Мс механической нагрузки.
Уравнение второго закона Кирхгофа для обмотки статора.
В двигательном режиме синхронная машина потребляет из сети ток, который направлен навстречу ЭДС (рис.4.14,а).
Уравнение, записанное по второму закону Кирхгофа для фазы обмотки статора
, (4. 4)
4)
показывает, что противо-ЭДС и индуктивное падение напряжения jXсин уравновешивают напряжение сети (предполагается, что
=0).
Векторная диаграмма синхронного двигателя.
Векторная диаграмма построена по уравнению (4.4) на рис. 4.14, б. В результате действия механической нагрузки Мс ось магнитного потока ротора Ф0 отстает на угол от оси результирующего магнитного потока Фрез. Поэтому в двигательном режиме вектор ЭДС отстает по фазе на угол от вектора напряжения сети . Сопоставление векторных диаграмм синхронного двигателя (рис. 4.14,б) и синхронного генератора (см. рис. 4.13) показывает, что угол меняет свой знак. При построении векторной диаграммы двигателя вектор принимается за исходный.
Вектор тока отстает по фазе на 90° от вектора jXсин.
Мощность и вращающий момент синхронного двигателя.
Активная мощность, потребляемая трехфазным синхронным двигателем из сети, равна утроенной фазной мощности.
Если пренебречь потерями, которые относительно малы, то активная потребляемая мощность равна электромагнитной мощности, т. е. мощности, передаваемой магнитным полем из статора в ротор, где — угол сдвига фаз между током и ЭДС.
Из треугольников Оса и асb векторной диаграммы на рис. 14.14, б следует, что отрезок , где —масштабный коэффициент. Подставляя значение IcosΨ в выражение для Рэм, получаем для механической мощности на валу двигателя
.
Механический момент на валу двигателя
,
(4.5)
где — угловая скорость ротора; Мтах = — максимальный момент, развиваемый двигателем. При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.
При постоянном напряжении сети Uc максимальный момент двигателя зависит только от ЭДС Е0, т.е. от тока возбуждения ротора Iв.
Угловая и механическая характеристики.
Зависимость момента синхронной машины от угла нагрузки при Uc = const называется угловой характеристикой машины. Угловая характеристика (рис. 4.15) в соответствии с (4.5) имеет вид синусоиды.
В двигательном режиме угол положительный, поэтому на графике двигательному режиму соответствует положительная полуволна синусоиды. В генераторном режиме угол отрицательный, ему соответствует отрицательная полуволна синусоиды. В диапазоне угла нагрузки -90°<<+90° (ветвь синусоиды показана сплошной линией) работа машины, как в двигательном, так и в генераторном режиме устойчива, а на участках кривой, изображённых штриховой линией, – неустойчива.
На устойчивом участке характеристики машина обладает свойством саморегулирования, т.е. при изменении момента нагрузки автоматически изменяется в том же направлении момент машины, причём так, что в новом установившемся режиме между ними достигается равновесное устойчивое состояние.
Так, в двигательном режиме при увеличении механической нагрузки Мс ротор притормаживается, угол нагрузки увеличивается и в соответствии с угловой характеристикой увеличивается вращающий момент двигателя М. При равенстве М= Мс наступит новый установившийся режим, причём частота вращения ротора останется неизменной и равной частоте вращения магнитного поля статора; только при этом равенстве существует электромагнитное взаимодействие полюсов ротора и статора, обусловливающее момент М машины.
Максимальный момент Мmax машины является и критическим. Если нагрузить двигатель так, что Мс> Мmax , то угол нагрузки станет больше 90°, рабочая точка перейдёт на неустойчивый участок угловой характеристики. Вращающий момент двигателя М начнёт уменьшаться, ротор тормозиться, двигатель выйдет из синхронизма и может остановиться.
Вращающий момент двигателя М начнёт уменьшаться, ротор тормозиться, двигатель выйдет из синхронизма и может остановиться.
Аналогичные явления происходят и в генераторном режиме. Выход («выпадение») машины из синхронизма – явление недопустимое, оно может привести к тяжёлой тобы в номинальном режиме угол нагрузки и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не менее 1,65.
Механической характеристикой синхронного двигателя называется зависимость частоты вращения от момента двигателя. В синхронном двигателе частота вращения ротора постоянна и от нагрузки не зависит. Поэтому механическая характеристика n(M) (рис. 4.18) – прямая, параллельная оси абсцисс.
Регулирование коэффициента мощности синхронного двигателя.
Синхронный двигатель в отличие от асинхронного обладает ценным для электроэнергетики свойством – он позволяет регулировать реактивную мощность, потребляемую из сети.
 Когда двигатель работает при неизменной механической нагрузке на валу, т.е. Мс= const при Uc = const, то активная мощность Р, потребляемая двигателем из сети, постоянна:
Когда двигатель работает при неизменной механической нагрузке на валу, т.е. Мс= const при Uc = const, то активная мощность Р, потребляемая двигателем из сети, постоянна:Если в этих условиях изменять ток возбуждения, ЭДС обмоток статораи изменяются так, что активная составляющая тока Icosφ и составляющая ЭДС остаются неизменными (рис. 14.17).
При изменении тока возбуждения векторскользит вдоль прямой ab, изменяются положение вектора jXсин и угол φ сдвига фаз между токоми напряжением сети , а, вследствие того, что, конец вектора токаскользит по прямой cd.
Когда ток возбуждения двигателя мал (недовозбуждение), =, ток отстаёт по фазе от и двигатель потребляет реактивную мощность. При некотором, относительно большом токе возбуждения =и ток является чисто активным.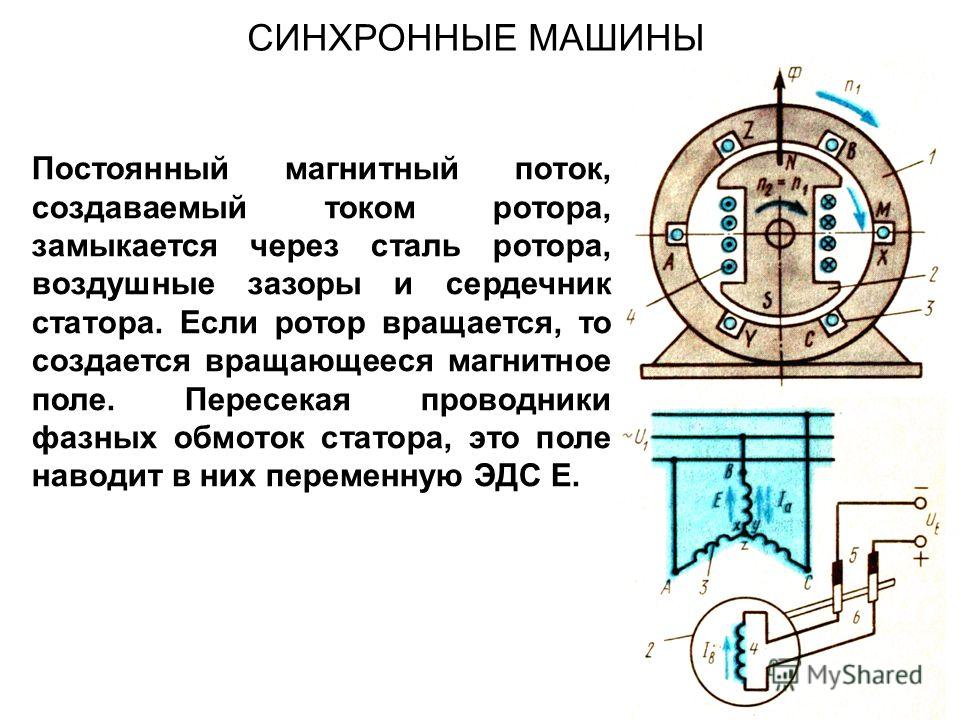
Наоборот, при перевозбуждении и вектор тока опережает по фазе вектор напряжения ,, ток, потребляемый двигателем из сети, имеет ёмкостную составляющую. Последнее весьма ценно, поскольку ёмкостный ток компенсирует индуктивные токи, потребляемые из сети другими потребителями (асинхронными двигателями, различного рода катушками и т.п.), и тем самым улучшается cosφ всей сети. Обычно синхронные двигатели работают с перевозбуждением при .
U – образные характеристики.
Зависимости I(Iв) при Uc = const и Р= const называются U – образными характеристиками. На рис. 4.18 изображены три такие характеристики для случаев Р=0 (режим холостого хода), некоторой мощности P1>0 P2> P1. Минимум тока на характеристиках соответствует активному току, потребляемому двигателем , левые ветви – перевозбуждённому двигателю и ёмкостному току.

При уменьшении тока возбуждения Iв уменьшается ЭДС Е0 и угол увеличивается (рис.4.17).
Штриховая кривая АВ на рис. 4.18 представляет собой границу устойчивости, на которой =90°.
Наиболее экономичным для самого синхронного двигателя является режим работы с , так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
Рис. 4.17 и 4.18
Обычно в эксплуатации синхронный двигатель перевозбуждают с целью улучшения cosφ сети. Режим перевозбуждения выгоден и тем, что уменьшается угол и возрастает перегрузочная способность двигателя. Вместе с этим следует учитывать, что обмотки статора двигателя рассчитаны на определённый ток с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током Ia (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока Ip.
Синхронные компенсаторы.
Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cosφ) электрической сети. Они работают без механической нагрузки на валу (ток Ia мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р=0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током Ip, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу.
Пуск синхронного двигателя.
Пуск синхронного двигателя сопряжён с трудностями. Если статорную обмотку включить в трёхфазную сеть, а обмотку возбуждения питать от источника постоянного напряжения Uв (рис. 4.19), то ротор не сдвинется с места – из-за инерционности ротора вращающееся поле статора не успевает сцепиться с неподвижным полем ротора.
Распространение получил так называемый асинхронный пуск синхронного двигателя. Для осуществления асинхронного пуска ротор синхронного двигателя снабжается специальной пусковой короткозамкнутой обмоткой из медных или алюминиевых стержней типа беличьей клетки асинхронного короткозамкнутого двигателя. Пуск двигателя осуществляют следующим образом (рис. 4.19).
Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат Rп, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции).
При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n0, пусковой реостат Rп отключают, а обмотку возбуждения ротора включают на постоянное напряжение Uв.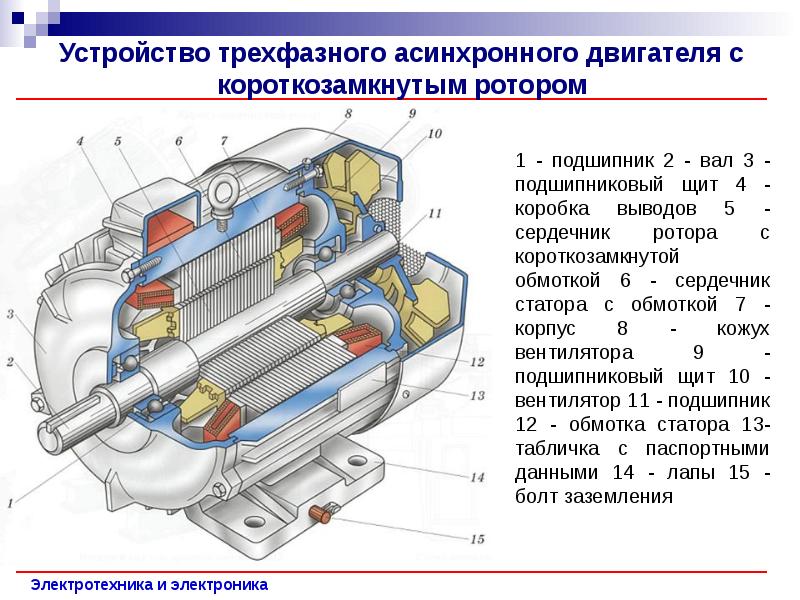
Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный.
В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
Преимущества, недостатки и применение синхронных двигателей.
Преимущество синхронных двигателей перед асинхронными состоит в том, что благодаря возбуждению от независимого источника постоянного тока они работают при высоком коэффициенте мощности (до ) и даже с опережающим током. Это обстоятельство позволяет увеличивать cosφ всей сети. Кроме того, работа двигателя с высоким cosφ обеспечивает уменьшение потребляемого тока и потерь в синхронном двигателе по сравнению с асинхронным той же мощности и, следовательно, более высокий КПД.

Наконец, вращающий момент синхронного двигателя пропорционален напряжению сети Uc . Поэтому при понижении напряжения в сети синхронный двигатель сохраняет большую перегрузочную способность, чем асинхронный, и, следовательно, обладает большей надёжностью.
Вместе с тем синхронный двигатель сложнее по конструкции, чем асинхронный той же мощности, и поэтому дороже. Синхронные двигатели должны иметь источник постоянного тока (специальный возбудитель или выпрямитель), пуск у них протекает сложнее, чем у асинхронных. Частотное регулирование является единственным способом регулирования угловой частоты вращения ротора синхронного двигателя.
Тем не менее, преимущества синхронных двигателей настолько велики, что при мощностях свыше 100 кВт их целесообразно применять всюду, где не требуется часто останавливать и пускать механизмы или регулировать их скорость. В настоящее время они применяются для привода преобразовательных агрегатов, компрессоров, насосов, вентиляторов, мельниц, дробилок, нерегулируемых прокатных станов и т. п.
п.
Отечественная промышленность выпускает трёхфазные синхронные двигатели мощностью от 20 кВт до нескольких десятков тысяч киловатт при частотах вращения от 100 до 1000 об/мин в явнополюсном исполнении и при 1500, 3000 об/мин – в неявнополюсном, с различным исполнением по способу защиты от внешних воздействий (открытое, защищённое, закрытое и т.д.), с различным рабочим положением вала (горизонтальные, вертикальные) и с различными системами возбуждения: от генератора постоянного тока, расположенного на одном валу с двигателем, от тиристорных выпрямителей и т.д.
Найдите эффективный и мощный трехфазный синхронный двигатель
Alibaba.com предлагает обширную коллекцию высококачественных, надежных и эффективных.
трехфазный синхронный двигатель продается, подходит для использования в промышленном и бытовом оборудовании. Файл. трехфазный синхронный двигатель могут быть однофазными или трехфазными, с разным размером корпуса, частотой вращения и номинальной мощностью. Найдите блоки с фланцевым креплением, с высоким крутящим моментом, на лапах, с двойным напряжением и низким крутящим моментом от различных ведущих поставщиков и брендов.
В продаже есть высокопроизводительные и эффективные устройства постоянного тока. или AC. трехфазный синхронный двигатель доступны в уникальных стилях, таких как последовательный, индукционный, синхронный, асинхронный, PMDC, шунтирующий и составной намотки. Эти агрегаты, спроектированные в соответствии с последними механическими и электрическими требованиями к характеристикам двигателей, отличаются надежностью, долгим сроком службы и универсальностью. Они имеют высококачественные и высокопроизводительные компоненты, в том числе прочную алюминиевую раму, опоры на лапах, стандартные валы, конденсаторный пуск, ротор и ход.
Откройте для себя. трехфазный синхронный двигатель с высокоэффективной конструкцией, превосходным пусковым моментом, быстрым откликом и простотой в использовании, работающей на чрезвычайно высоких скоростях. Существуют устройства с разной выходной мощностью и мощностью, а также различные размеры и конструкции, специально разработанные для небольших бытовых приборов или электроинструментов. Независимо от машины, устройства или устройств, делайте покупки на Alibaba.com, чтобы найти продукты, отличающиеся надежной работой, превосходной производительностью, простотой обслуживания и интересным внешним видом.
Найдите на Alibaba.com информацию. трехфазный синхронный двигатель и покупайте товары с функциями и функциями, подходящими для различных бытовых приборов и электроинструментов. Выбирайте из разных производителей и поставщиков, которым доверяют в мире. Просматривайте товары разных брендов, чтобы фильтровать и находить высококачественные товары, соответствующие бюджетам и ожиданиям уникальных покупателей.

Трехфазный синхронный двигатель
Трехфазный синхронный двигатель – это уникальный и специализированный двигатель. Как следует из названия, этот двигатель работает с постоянной скоростью от холостого хода до полной нагрузки синхронно с частотой сети. Как и в асинхронных двигателях с короткозамкнутым ротором, скорость синхронного двигателя определяется количеством пар полюсов и частотой сети. Функционирование типичного трехфазного синхронного двигателя можно резюмировать следующим образом:
- На обмотки статора подается трехфазное переменное напряжение и создается вращающееся магнитное поле.
- К обмотке ротора прикладывается постоянное напряжение, и создается второе магнитное поле.
- В этом случае ротор действует как магнит и притягивается вращающимся полем статора.
- Это притяжение создает крутящий момент на роторе и заставляет его вращаться с синхронной скоростью вращающегося поля статора.
- Для возбуждения ротору не требуется магнитная индукция от поля статора.
 В результате двигатель имеет нулевое скольжение по сравнению с асинхронным двигателем, которому требуется скольжение для создания крутящего момента.
В результате двигатель имеет нулевое скольжение по сравнению с асинхронным двигателем, которому требуется скольжение для создания крутящего момента.
Отстающий коэффициент мощности электрической системы можно скорректировать путем перевозбуждения ротора синхронного двигателя, работающего в той же системе. Это создаст опережающий коэффициент мощности, нейтрализуя отстающий коэффициент мощности индуктивных нагрузок. Недовозбужденное поле постоянного тока создает запаздывающий коэффициент мощности и по этой причине редко используется. Когда поле нормально возбуждено, синхронный двигатель будет работать с единичным коэффициентом мощности. Трехфазные синхронные двигатели могут использоваться для коррекции коэффициента мощности, в то же время выполняя важную функцию, например, работу компрессора. Однако, если выходная механическая мощность не требуется или может быть обеспечена другими экономически эффективными способами, синхронная машина остается полезной как «немоторное» средство управления коэффициентом мощности.Он выполняет ту же работу, что и батарея статических конденсаторов. Такая машина называется синхронным конденсатором или конденсатором.
Недовозбужденное поле постоянного тока создает запаздывающий коэффициент мощности и по этой причине редко используется. Когда поле нормально возбуждено, синхронный двигатель будет работать с единичным коэффициентом мощности. Трехфазные синхронные двигатели могут использоваться для коррекции коэффициента мощности, в то же время выполняя важную функцию, например, работу компрессора. Однако, если выходная механическая мощность не требуется или может быть обеспечена другими экономически эффективными способами, синхронная машина остается полезной как «немоторное» средство управления коэффициентом мощности.Он выполняет ту же работу, что и батарея статических конденсаторов. Такая машина называется синхронным конденсатором или конденсатором.
Синхронный двигатель – строительно-рабочий
Синхронный двигатель и асинхронный двигатель – наиболее широко используемые типы двигателей переменного тока. Конструкция синхронного двигателя аналогична генератору переменного тока. Та же самая синхронная машина может использоваться как синхронный двигатель или как генератор переменного тока. Синхронные двигатели доступны в широком диапазоне, обычно мощностью от 150 кВт до 15 МВт со скоростью от 150 до 1800 об / мин.
Синхронные двигатели доступны в широком диапазоне, обычно мощностью от 150 кВт до 15 МВт со скоростью от 150 до 1800 об / мин.Конструкция синхронного двигателя
Конструкция синхронного двигателя (с явнополюсным ротором) показана на рисунке слева. Как и любой другой двигатель, он состоит из статора и ротора. Сердечник статора изготовлен из тонкой кремниевой пластинки и изолирован поверхностным покрытием, чтобы минимизировать потери на вихревые токи и гистерезис. Внутри статора имеются осевые пазы, в которых размещена трехфазная обмотка статора. На статор намотана трехфазная обмотка на определенное количество полюсов, равное полюсам ротора. Ротор в синхронных двигателях в основном является явнополюсным. Питание постоянного тока на обмотку ротора подается через контактные кольца. Постоянный ток возбуждает обмотку ротора и создает электромагнитные полюса. В некоторых случаях также можно использовать постоянные магниты. На приведенном выше рисунке очень кратко проиллюстрирована конструкция синхронного двигателя .
Работа синхронного двигателя
Статор намотан на такое же количество полюсов, что и ротор, и питается от трехфазного источника переменного тока.Трехфазный источник переменного тока создает вращающееся магнитное поле в статоре. Обмотка ротора питается от источника постоянного тока, который намагничивает ротор. Рассмотрим двухполюсную синхронную машину , как показано на рисунке ниже.- Теперь полюса статора вращаются с синхронной скоростью (скажем, по часовой стрелке). Если положение ротора таково, что полюс N ротора находится рядом с полюсом N статора (как показано на первом схематическом рисунке выше), то полюса статора и ротора будут отталкиваться друг от друга, и создаваемый крутящий момент будет против часовой стрелки .
- Полюса статора вращаются с синхронной скоростью, они вращаются очень быстро и меняют свое положение. Но очень скоро ротор не сможет вращаться на тот же угол (из-за инерции), и следующая позиция, вероятно, будет второй схемой на приведенном выше рисунке.
 В этом случае полюса статора будут притягивать полюса ротора, и создаваемый крутящий момент будет вращаться по часовой стрелке.
В этом случае полюса статора будут притягивать полюса ротора, и создаваемый крутящий момент будет вращаться по часовой стрелке. - Следовательно, на ротор будет действовать быстро меняющийся крутящий момент, и двигатель не запустится.
Характерные особенности синхронного двигателя
- Синхронный двигатель будет работать либо с синхронной скоростью, либо не будет работать вообще.
- Единственный способ изменить его скорость – это изменить его частоту питания.
 (Поскольку Ns = 120f / P)
(Поскольку Ns = 120f / P) - Синхронные двигатели не запускаются автоматически. Им нужна некоторая внешняя сила, чтобы приблизить их к синхронной скорости.
- Могут работать с любым коэффициентом мощности, как с отставанием, так и с опережением. Следовательно, синхронные двигатели могут использоваться для улучшения коэффициента мощности.
Применение синхронного двигателя
- Поскольку синхронный двигатель может работать как с опережающим, так и с запаздывающим коэффициентом мощности, его можно использовать для улучшения коэффициента мощности. Синхронный двигатель без нагрузки с опережающим коэффициентом мощности подключается к энергосистеме, в которой нельзя использовать статические конденсаторы.
- Используется там, где требуется большая мощность при низкой скорости. Такие как прокатные станы, измельчители, смесители, насосы, насосы, компрессоры и т. Д.
– обзор
Коэффициент мощности для переменного тока
Коэффициент мощности – это коэффициент, на который умножается кажущаяся мощность в кВА для получения фактической мощности, кВт, в системе переменного тока. Это отношение синфазной составляющей линейного тока к общему току [39].
Это отношение синфазной составляющей линейного тока к общему току [39].
В асинхронных двигателях намагничивающая составляющая тока всегда отстает на 90 °. Следовательно, линейный ток отстает при всех нагрузках; величина зависит от нагрузки тока намагничивания.
В синхронных двигателях возбуждение обеспечивается отдельным источником постоянного тока, либо в виде отдельной мотор-генераторной установки (M-G), либо в виде возбудителя, установленного непосредственно на валу двигателя. Ток можно сделать опережающим в разной степени, варьируя величину напряженности поля.Коэффициент мощности двигателей может быть отстающим, единичным или опережающим. При использовании переменного тока потребляемая мощность, называемая активной или фактической мощностью , считается энергией, используемой резистивной нагрузкой [40]. Синхронный двигатель обеспечивает единицу или опережающий фактор, а асинхронный двигатель обеспечивает единицу или запаздывающий фактор.
Применяя надлежащую величину возбуждения постоянного тока к полюсам возбуждения синхронного двигателя, он работает с единичным коэффициентом мощности.
Синхронные двигатели с коэффициентом мощности Unity предназначены для работы именно таким образом.Полная нагрузка, с возбуждением, они не требуют отставания реактивной кВА от линии и не подают опережающую реактивную кВА к линии; они работают с единичным коэффициентом мощности с минимальным током статора и, следовательно, с самым высоким КПД [15].
Проконсультируйтесь с квалифицированным инженером-электриком о типах двигателей, предлагаемых для технологического предприятия; такая оценка сочетания синхронных и асинхронных двигателей поможет определить новый коэффициент мощности для установки, потому что чистый коэффициент запаздывания для станций означает, что вся мощность для этой установки будет стоить больше, чем если бы коэффициент был единицей или опережающим.Из Brown and Cadick [40]:
Полная мощность = EI, или ВА, или кВА
Активная мощность = EICosθ, или Вт, или кВт
Примечание: θ = угол вектора тока между полной и активной мощностью на векторной диаграмме
Реактивная мощность = EISinθ, или VAR, или kVAR
Расчетный коэффициент мощности:
F p = активная мощность / полная мощность
F p = EICosθ / (EI) = cosθ
F p = Вт / (ВАр) = (кВт) / (кВАр)
Обратите внимание, что реактивная мощность предъявляет требования к энергосистеме, но не создает никакой полезной работы.
(20-13) Номинальная мощность двигателяVA = (л.с.) (0,746) (Eff) (powerfactor)
Плата за электроэнергию основана на потребляемой мощности в кВАр; таким образом, чем ниже коэффициент мощности, тем выше плата за потребление. См. Полезные обсуждения этого вопроса в Планкенхорне [41], Валода [42] и Лазаре [43]. Плата за электроэнергию зависит от требований VAR; таким образом, чем ниже коэффициент мощности, тем выше плата за потребление.
На большинстве технологических предприятий необходимо соблюдать осторожность, чтобы поддерживать подходящий коэффициент мощности для своей системы, в противном случае может быть наложен штраф на затраты на электроэнергию.Если коэффициент мощности падает ниже некоторого установленного значения, например 0,8, затраты на электроэнергию увеличиваются, потому что фактическая мощность (в виде тока), необходимая для работы (в лошадиных силах), значительно меньше общей, подаваемой в систему установки. Разница в том, что он попадает в поле намагничивания (реактивный ток), что не соответствует реальной работе. Добавляя синхронные двигатели или конденсаторы к системе с полностью индукционной нагрузкой, вы можете поднять коэффициент мощности с запаздывающего состояния до единицы (или почти до единицы). Синхронные двигатели могут быть спроектированы так, чтобы обеспечивать переменные величины опережающего коэффициента мощности.Это исследование или баланс, который необходимо учитывать при проектировании станции, а рекомендации должны быть подготовлены компетентными инженерами-электриками.
Обычно коэффициент мощности синхронного двигателя равен единице (1,0) или 0,8. Значения опережения 0,7 или 0,6 дадут большую коррекцию опережения для другой запаздывающей системы.
Рисунок 20-13 иллюстрирует работу с коэффициентом мощности для различных типов оборудования.
Рисунок 20-13. Коэффициент мощности различных устройств и то, как синхронные двигатели улучшают коэффициент мощности.
(Используется с разрешения: EM Synchronizer, 200-SYN-42, © 1955. Dresser-Rand Company.)Асинхронный двигатель обычно требует реактивного намагничивания от 0,3 до 0,6 кВА на л.с. или рабочую нагрузку, но опережающую мощность 0,8 Синхронный двигатель с коэффициентом усиления будет обеспечивать мощностью корректирующего намагничивания 0,4–0,6 кВА на л.с. в зависимости от переносимой механической нагрузки. Таким образом, равные подключенные л.с. в асинхронных двигателях и синхронных двигателях с опережающим коэффициентом мощности 0,8 приведут к коэффициенту мощности системы, приблизительно равному единице [39].
(20-14) реактивная кВА = (totalalkVA) 2- (кВт) 2
Это всегда отстает для асинхронного двигателя. Для синхронного двигателя с коэффициентом мощности (PF) = 1,0 кВА и кВт равны, а для любого коэффициента мощности меньше 1,0, то есть 0,9, 0,8, 0,7 и т. Д., Коэффициент мощности является опережающим. Также см. Ссылки [44–46].
Принцип работы, типы и применение
В электрических системах, которые мы используем в промышленности, на электростанциях или в быту, двигатели и генераторы стали обычным явлением.В связи со спросом на высокоэффективные и менее энергопотребляющие системы наблюдается изобретение новых моделей этих электрических устройств. Основным расчетным фактором надежной работы двигателей и генераторов является коэффициент мощности . Это отношение приложенной мощности к требуемой мощности. Обычно общее количество электроэнергии, потребляемой предприятиями и предприятиями, рассчитывается на основе коэффициента мощности. Таким образом, коэффициент мощности всегда должен поддерживаться равным единице. Но из-за роста реактивной мощности в этих устройствах коэффициент мощности уменьшается.Чтобы поддерживать коэффициент мощности равным единице, вводятся многие методы. Концепция синхронного двигателя – одна из них.
Что такое синхронный двигатель?
Определение синхронного двигателя гласит: «Двигатель переменного тока, в котором в установившемся режиме вращение вала синхронизируется с частотой приложенного тока». Синхронный двигатель работает как двигатель переменного тока, но здесь общее количество оборотов, совершаемых валом, равно целому кратному частоте приложенного тока.
Синхронный двигатель
Синхронный двигатель не использует индукционный ток для работы.В этих двигателях, в отличие от асинхронных двигателей, на stato r присутствуют многофазные электромагниты переменного тока, которые создают вращающееся магнитное поле. Здесь ротор представляет собой постоянный магнит, который синхронизируется с вращающимся магнитным полем и вращается синхронно с частотой приложенного к нему тока.
Конструкция синхронного двигателя
Статор и ротор являются основными компонентами синхронного двигателя. Здесь на корпусе статора имеется оберточная пластина, к которой прикреплены шпонки и периферийные ребра.Опоры, рамы используются для поддержки машины. Для возбуждения обмоток возбуждения постоянным током используются контактные кольца и щетки.
Цилиндрические и круглые роторы используются для 6 полюсов. Роторы с явнополюсными роторами используются, когда требуется большее количество полюсов. Конструкция синхронного двигателя и синхронного генератора аналогична.
Принцип работы синхронного двигателя
Работа синхронных двигателей зависит от взаимодействия магнитного поля статора с магнитным полем ротора.Статор содержит 3-х фазные обмотки и питается 3-х фазным питанием. Таким образом, обмотка статора создает трехфазное вращающееся магнитное поле. На ротор подается постоянный ток.
Ротор входит во вращающееся магнитное поле, создаваемое обмоткой статора, и вращается синхронно. Теперь скорость двигателя зависит от частоты подаваемого тока.
Скорость синхронного двигателя регулируется частотой приложенного тока. Скорость синхронного двигателя можно рассчитать как
Ns = 60f / P = 120f / p
где f = частота переменного тока (Гц)
p = общее количество полюсов на фазу
P = общее количество пар полюсов на фазу.
Если применяется нагрузка, превышающая пробивную нагрузку, двигатель десинхронизируется. Трехфазная обмотка статора дает преимущество определения направления вращения. В случае однофазной обмотки невозможно определить направление вращения, и двигатель может запускаться в любом из направлений. Для управления направлением вращения в этих синхронных двигателях необходимы пусковые устройства.
Способы пуска синхронного двигателя
Момент инерции ротора останавливает крупногабаритные синхронные двигатели от самозапуска.Из-за этой инерции ротора ротор не может синхронизироваться с магнитным полем статора в момент подачи питания. Поэтому требуется некоторый дополнительный механизм, чтобы помочь ротору синхронизироваться.
В большие двигатели входят индукционные обмотки, которые создают достаточный крутящий момент, необходимый для ускорения. Для очень больших моторов для разгона ненагруженной машины используется пони-мотор. Изменяя частоту тока статора, двигатели с электронным управлением могут ускоряться даже с нулевой скорости.
Для очень маленьких двигателей, когда момент инерции ротора и механическая нагрузка желательно малы, они могут запускаться без каких-либо методов запуска.
Типы синхронных двигателей
В зависимости от метода намагничивания ротора существует два типа синхронных двигателей –
- без возбуждения.
- Постоянный ток Возбужден.
Двигатель без возбуждения
В этих двигателях ротор намагничивается внешним полем статора.Ротор содержит постоянное магнитное поле. Для изготовления ротора используется сталь с высокой удерживающей способностью, такая как кобальтовая сталь. Они классифицируются как двигатели с постоянным магнитом, реактивные и гистерезисные.
- В синхронных двигателях с постоянными магнитами постоянный магнит используется вместе со сталью для конструкции ротора. У них постоянное магнитное поле в роторе, поэтому индукционную обмотку нельзя использовать для запуска. Применяются в качестве безредукторных двигателей лифтов.
- Ротор реактивного двигателя выполнен из стального литья с выступающими полюсами.Чтобы минимизировать пульсации крутящего момента, полюса ротора меньше полюсов статора. Содержит обмотку с короткозамкнутым ротором для обеспечения пускового момента ротора. Используется в измерительных приборах.
- Двигатели с гистерезисом – это самозапускающиеся двигатели. Здесь ротор представляет собой гладкий цилиндр, изготовленный из магнитотвердой кобальтовой стали с высокой коэрцитивной силой. Эти двигатели дороги и используются там, где требуется точная постоянная скорость. Обычно используется в качестве серводвигателей.
Двигатель с возбуждением постоянным током
Здесь ротор возбуждается постоянным током, подаваемым непосредственно через контактные кольца.Также используются индукция переменного тока и выпрямители. Обычно они имеют большие размеры, например, более 1 л.с. Эти двигатели с малой мощностью применяются в позиционирующих машинах. Они также применяются в приводах роботов. В шаровых мельницах, часах, проигрывателях пластинок также используются синхронные двигатели. Кроме того, эти двигатели также используются в качестве серводвигателей и синхронизаторов.
Эти двигатели доступны в диапазоне от дробных подковообразных до мощных промышленных размеров. Хотя эти двигатели используются в промышленных масштабах большой мощности, они выполняют две важные функции. Один является эффективным средством преобразования энергии переменного тока в механическую энергию, а другой – коррекцией коэффициента мощности. С каким применением серводвигателя вы сталкивались?
Трехфазный синхронный двигатель | Строительство | Рабочая | Способы пуска
В этой статье мы подробно рассмотрели конструкцию трехфазного синхронного двигателя, принцип работы, методы пуска и применения:
Трехфазный синхронный двигатель не имеет пускового момента.Он должен быть увеличен до скорости или как можно ближе к ней с помощью каких-либо других средств, чтобы он мог привести себя в синхронизм.
После набора скорости поле ротора может быть возбуждено постоянным током, и ротор, по сути, затем перемещается с той же скоростью, что и трехфазное поле статора. Его скорость синхронизирована со скоростью поля статора. Он принципиально отличается от асинхронного двигателя , в котором вращающееся поле статора противодействует индуцированному полю ротора.Это заставляет ротор вращаться, но с некоторым проскальзыванием, тогда как в синхронном двигателе проскальзывания быть не может, просто «свисает» из-за нагрузки, приложенной к машине. Это проиллюстрировано на фиг. , , , 1, и показано как угол крутящего момента. Если нагрузка становится слишком большой для синхронного двигателя, он немедленно выходит из синхронизма и останавливается.
Рисунок 1 Относительное положение магнитных полей статора и ротора
Конструкция синхронного двигателяСтатор
Статор имеет трехфазную обмотку и имеет тот же тип, что и в генераторе или Индукционный двигатель.
Когда эта обмотка запитана переменным током, она создает магнитный поток, который вращается со скоростью, называемой синхронной скоростью. Это та же скорость, с которой синхронная машина должна была бы приводиться в движение, чтобы генерировать переменное напряжение с частотой сети.
Скорость вращающегося магнитного поля может быть получена по следующей формуле:
Ротор
Хотя конструкция ротора генератора аналогична конструкции, он обычно изготавливается с выступающими полюсами.При возбуждении постоянным током он создает чередующиеся северный и южный магнитные полюса, которые притягиваются к полюсам статора.
Принцип работыСинхронный двигатель работает по принципу магнитного притяжения между двумя магнитными полями противоположной полярности; один – вращающееся магнитное поле статора, а другой – магнитное поле ротора.
Синхронный двигатель имеет крутящий момент только при синхронной скорости, поэтому необходимо предпринять специальные меры, чтобы двигатель набрал скорость и синхронизировался с источником питания.Затем два магнитных поля вращаются с одинаковой скоростью и сцепляются друг с другом.
Влияние нагрузки на синхронный двигатель
Когда синхронный двигатель работает без нагрузки, относительные положения полюсов статора и ротора совпадают (см. Рисунок 1 (a) ).
При приложении нагрузки ротор должен продолжать вращаться с синхронной скоростью, но из-за замедляющего действия нагрузки полюс ротора отстает от полюса статора.Их относительное положение смещено на угол a, который называется «крутящим моментом» или «углом нагрузки» (см. Рисунок 1 (b) ). Чем больше прилагаемая нагрузка, тем больше угол крутящего момента.
Магнитная связь между каждым полюсом статора и ротора искажается в зависимости от приложенной нагрузки. Если нагрузка на двигатель становится чрезмерной, магнитная муфта разрывается, и ротор замедляется до полной остановки.
Когда двигатель вращается с синхронной скоростью, с постоянным возбуждением постоянного тока в обмотках ротора, магнитный поток ротора разрезает обмотки статора, вызывая напряжение в каждой фазной обмотке.По закону Ленца это напряжение противостоит приложенному напряжению. Фазовое соотношение между этим индуцированным напряжением и приложенным напряжением зависит от относительного положения каждого полюса статора и ротора, которые, в свою очередь, зависят от нагрузки, приложенной к двигателю.
На примере идеального синхронного двигателя без потерь мы можем проверить работу без нагрузки. Пренебрегая потерями в двигателе, на холостом ходу угол крутящего момента равен нулю, поэтому индуцированное напряжение В, g и приложенное напряжение В, равны и противоположны.Результирующее напряжение В, R на обмотках равно нулю, поэтому ток, потребляемый от источника питания, также равен нулю. Это проиллюстрировано векторами на Рис. 2 (a) .
Рисунок 2 Влияние нагрузки на сетевой ток при постоянном возбуждении
Когда к двигателю приложена небольшая нагрузка, угол крутящего момента α увеличивается, и индуцированное напряжение В g в обмотках статора теперь (180 – α) ° E в противофазе с приложенным напряжением В (см. Рисунок 2 (b) ).
Эти два напряжения объединяются для создания эффективного напряжения В R на обмотках статора, которого достаточно для отвода тока I от источника питания. Из-за относительно высокой индуктивности обмоток статора линейный ток I, в каждой обмотке отстает от каждого результирующего напряжения В, R почти на 90 ° E. Это приводит к тому, что линейный ток I отстает от приложенного напряжения на Φ.
По мере увеличения нагрузки увеличивается угол крутящего момента.Это вызывает увеличение результирующего напряжения В R на каждой обмотке статора (см. Рисунок 2 (c) ). Из-за увеличения значения В, , R , линейный ток I увеличивается, а также увеличивается фазовый угол Ф между приложенным напряжением В и линейным током I . Следовательно, при фиксированном возбуждении любое увеличение нагрузки синхронного двигателя вызовет увеличение линейного тока при более низком коэффициенте мощности.
Эффект возбуждения переменного поля
Если нагрузка, приложенная к синхронному двигателю, постоянна, входная мощность двигателя также постоянна. Когда возбуждение поля ротора изменяется, индуцированное напряжение в каждой обмотке статора также изменяется.
Векторная диаграмма на рисунке Рисунок 3 (a) на обороте представляет условия для данной нагрузки при единичном коэффициенте мощности. Потребляемая мощность на фазу составляет VI 1 . Если возбуждение поля ротора уменьшается, индуцированное напряжение В g уменьшается (см. Рисунок 3 (b) ).Это приводит к тому, что линейный ток I 2 отстает от приложенного напряжения В на Φ 2 .
Поскольку нагрузка и, следовательно, потребляемая мощность постоянны, составляющая мощности I 2 должна оставаться такой же, как I 1 in Рисунок 3 (a) . Линейный ток I 2 должен увеличиваться, чтобы приспособиться к запаздывающему коэффициенту мощности. Следовательно, уменьшение возбуждения постоянного поля вызывает увеличение линейного тока и запаздывающий коэффициент мощности.
Рисунок 3 Эффект изменения возбуждения постоянным током
Если возбуждение постоянным током увеличивается, индуцированное напряжение В g увеличивается (см. Рисунок 3 (c)). Линейный ток I 3 , таким образом, будет опережать приложенное напряжение В на Φ 3 , а также будет больше, чем I 1 в Рис. то же, за счет того, что нагрузка остается постоянной.Следовательно, увеличение возбуждения постоянного тока вызывает увеличение линейного тока и ведущего коэффициента мощности.
Можно увидеть, что если возбуждение синхронного двигателя при постоянной нагрузке изменяется от низкого до более высокого значения, то:
1. Ток статора постепенно уменьшается, достигает минимума, а затем снова увеличивается
2. Коэффициент мощности, сначала отстающий, постепенно увеличивается, становится единым, когда ток статора минимален, а затем снова уменьшается, но становится опережающим.
Следует соблюдать осторожность при настройке возбуждения синхронного двигателя. Есть пределы, до которых его можно безопасно принять.
Чрезмерное возбуждение и недовозбуждение может привести к нестабильности синхронного двигателя. После того, как эти пределы превышены, мощность, производимая двигателем, уменьшается, и опасность перегрузки становится неизбежной, поскольку машина превышает свои проектные пределы.
Наиболее очевидная ситуация – это ситуация с недовозбуждением , где магнитная связь между вращающимся полем и ротором настолько ослаблена, что нагрузка превышает крутящий момент отрыва двигателя, и она выходит из синхронизма.
Избыточное возбуждение создает ситуацию, когда линейный ток и механическая нагрузка превышают номинальную полную нагрузку машины, и магнитная связь становится настолько жесткой, что изменения нагрузки вызывают чрезмерные механические напряжения на валу двигателя.
Охота в синхронных двигателях
Изменение нагрузки синхронного двигателя вызывает изменение значения угла крутящего момента (см. Рисунок 1 ). В общем, инерция ротора препятствует мгновенному переходу к новым условиям, в результате чего ротор смещается за точку равновесия и затем должен сам исправляться.
В то время как ротор и вращающееся поле в статоре все еще вращаются с синхронной средней скоростью, изменение нагрузки на ротор вызывает это периодическое колебание вокруг точки равновесия. Эти всплески или колебания вызывают нежелательные колебания линейного тока двигателя.
Обычный метод гашения этих скачков – использование демпферной обмотки, называемой амортизирующей обмоткой . Он состоит из медных шин, встроенных в полюсные поверхности ротора и закороченных на каждом конце (см. Рисунок 4).Любой скачок напряжения вызывает наведенное напряжение в медных шинах. В результате создается магнитное поле, противодействующее эффекту помпажа.
Рисунок 4 Выступающий полюс с обмотками амортизатора
Часто закорачивающие стержни удлиняются вокруг ротора, что приводит к обмотке ротора типа «беличья клетка» вокруг выступающих полюсов. Демпфируя любую тенденцию ротора к сбою, они также могут способствовать запуску двигателя, действуя как секции обмотки с короткозамкнутым ротором.Фактически эта обмотка позволяет запускать двигатель как асинхронный.
Применение синхронных двигателейКоррекция коэффициента мощности
Возможность регулировки коэффициента мощности синхронного двигателя во время его работы может быть успешно использована в промышленности как средство коррекции коэффициент мощности нагрузок, питаемых от сети установки.
Синхронный двигатель может работать без нагрузки, но чаще он используется для привода какого-либо оборудования, необходимого для работы завода; например, воздушные или гидравлические компрессоры, высокочастотные генераторы переменного тока, большие вентиляторы и нагнетатели или системы подачи воды под высоким давлением.
Дополнительным преимуществом может быть экономический стимул, предлагаемый распределительными организациями для обеспечения определенного минимального значения коэффициента мощности в установке. Например, плата за кВтч может быть уменьшена, если коэффициент мощности не упадет ниже 0,75 или подобного Рисунок . В тех случаях, когда распределяется большая мощность и требуется коррекция коэффициента мощности, специально разработанные синхронные двигатели работают без подключенной нагрузки. В этих условиях синхронный двигатель с избыточным возбуждением называется «синхронным конденсатором» или «конденсатором».
Контроль напряжения
Важным применением является контроль напряжения на линиях передачи . Синхронные двигатели устанавливаются в подходящих местах вдоль линии, и их возбуждение регулируется по желанию, чтобы заставить их потреблять запаздывающие или опережающие токи для повышения или понижения напряжения. Когда синхронные двигатели устанавливаются в этих условиях, повышается стабильность напряжения в линии передачи.
Низкоскоростные приводы
Синхронный двигатель имеет хороший КПД, а его высокая начальная стоимость на низких скоростях адекватно компенсируется сравнительно более низкими эксплуатационными расходами.На низких скоростях асинхронный двигатель имеет снижающийся КПД, в то время как синхронный двигатель сохраняет высокий КПД.
Головки для дробления горных пород и руды
Для этого применения требуется очень медленная дробильная головка с очень тяжелым вращающимся маховиком, обеспечивающим кинетическую энергию при внезапных ударных нагрузках на дробящую головку.
Способы пуска синхронных двигателейВспомогательные двигатели
Некоторые синхронные двигатели оснащены специальным двигателем, предназначенным для использования только в период пуска.Вспомогательный двигатель приводит синхронный двигатель в движение до нужной скорости, на которой он сначала синхронизируется, а затем подключается к источнику питания. Это дорогостоящий метод, особенно если требуются высокие пусковые моменты.
Запуск асинхронного двигателя
В этом методе пониженное линейное напряжение подается на обмотки статора, а обмотка постоянного тока на роторе закорачивается. С помощью обмоток амортизатора вся машина ведет себя как асинхронный двигатель, разгоняясь до скорости немного ниже синхронизма.
В соответствующее время короткое замыкание устраняется с обмотки ротора, на обмотку ротора подается постоянный ток, а на обмотку статора подается полное линейное напряжение. Поскольку скорость лишь немного меньше синхронной скорости, поле ротора может синхронизироваться с полем статора и ускоряться до синхронизма.
Типы двигателей переменного тока
Типы двигателей переменного тока ВИДЫ ДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКАВ авиационных системах используются два основных типа двигателей переменного тока: индукционные. двигатели и синхронные двигатели.Любой тип может быть однофазным, двухфазным, или трехфазный.
Трехфазные асинхронные двигатели используются там, где требуется большая мощность. обязательный. Они управляют такими устройствами, как стартеры, закрылки, шасси, и гидравлические насосы.
Однофазные асинхронные двигатели используются для управления такими устройствами, как наземные замки, заслонки промежуточного охладителя и масляные запорные клапаны, в которых требование низкое.
Трехфазные синхронные двигатели работают с постоянной синхронной скоростью. и обычно используются для управления флюсовыми компасами и синхронизатором гребного винта. системы.
Однофазные синхронные двигатели являются обычными источниками энергии для работы электрические часы и другое мелкое прецизионное оборудование. Они требуют некоторых вспомогательный метод приведения их к синхронным скоростям; то есть начать их. Обычно пусковая обмотка состоит из вспомогательной обмотки статора.
Трехфазный асинхронный двигатель
Трехфазный асинхронный двигатель переменного тока также называется двигателем с короткозамкнутым ротором. И однофазные, и трехфазные двигатели работают по принципу вращающееся магнитное поле.Подковообразный магнит, удерживаемый над стрелкой компаса это простая иллюстрация принципа вращающегося поля. Игла займет положение параллельно магнитному потоку, проходящему между два полюса магнита. Если повернуть магнит, стрелка компаса будет следить. Вращающееся магнитное поле может создаваться двух- или трехфазным ток, протекающий через две или более группы катушек, намотанных внутрь, выступающих внутрь столбы железного каркаса. Катушки на каждой группе полюсов намотаны поочередно. в противоположных направлениях для получения противоположной полярности, и каждая группа подключен к отдельной фазе напряжения.Принцип работы зависит от на вращающемся или вращающемся магнитном поле для создания крутящего момента. Ключ к пониманию асинхронного двигателя – это полное понимание вращающееся магнитное поле.
Вращающееся магнитное поле
Структура поля, показанная в А из рисунок 9-83 имеет полюса, обмотки которых запитаны тремя переменными напряжениями: a, b и c. Эти напряжения имеют одинаковую величину, но различаются по фазе, как показано на B на рисунке 9-83.
В момент времени, показанного как 0 в B фигура 9-83, результирующее магнитное поле, создаваемое приложением три напряжения имеют наибольшую интенсивность в направлении, простирающемся от от полюса 1 к полюсу 4. При этом условии полюс 1 можно рассматривать как северный полюс и полюс 4 как южный полюс.
В момент времени, обозначенный цифрой 1, результирующее магнитное поле будет имеют наибольшую интенсивность в направлении от полюса 2 к полюсу 5; в этом случае полюс 2 можно рассматривать как северный полюс, а полюс 5 – как южный полюс.Таким образом, между моментом 0 и моментом 1 магнитное поле повернулся по часовой стрелке.
В момент 2 результирующее магнитное поле имеет наибольшую напряженность. в направлении от полюса 3 к полюсу 6, и результирующее магнитное поле продолжал вращаться по часовой стрелке.
В момент 3 полюса 4 и 1 можно рассматривать как северный и южный полюсы, соответственно, и поле повернулось еще дальше.
В более поздние моменты времени результирующее магнитное поле поворачивается к другому позиции при движении по часовой стрелке, один оборот поля, происходящего за один цикл.Если возбуждающие напряжения имеют частоту 60 гц, магнитное поле делает 60 оборотов в секунду, или 3600 об / мин. Эта скорость известна как синхронная скорость вращающегося поля.
Конструкция асинхронного двигателя
Стационарная часть асинхронного двигателя называется статором, и вращающийся элемент называется ротором. Вместо заметных полюсов в статор, как показано в A на рисунке 9-83, распределен используются обмотки; эти обмотки размещены в пазах по периферии статора.
Обычно невозможно определить количество полюсов в индукционной двигатель при визуальном осмотре, но информацию можно получить на паспортная табличка мотора. На паспортной табличке обычно указано количество полюсов. и скорость, с которой двигатель предназначен для работы. Это оцененное или несинхронное, скорость немного меньше синхронной скорости. Чтобы определить количество количества полюсов на фазу двигателя, разделите частоту в 120 раз на Номинальная скорость; записано в виде уравнения:
где: P – количество полюсов на фазу, f – частота в гц, N – номинальная скорость в об / мин, 120 – постоянная.
Результат будет почти равен количеству полюсов на фазу. Например, рассмотрите 60-тактный трехфазный двигатель с номинальной скоростью. 1750 об. / мин. В таком случае:
Следовательно, у двигателя четыре полюса на фазу. Если количество полюсов
для каждой фазы указано на паспортной табличке, можно определить синхронную скорость
путем деления частоты в 120 раз на количество полюсов на фазу. В
в примере, использованном выше, синхронная скорость равна 7200 разделенным
на 4, или на 1800 об / мин.
| Ротор асинхронного двигателя состоит из железного сердечника.
с продольными прорезями по окружности, в которых тяжелая медь
или алюминиевые стержни врезаны. Эти стержни приварены к тяжелому кольцу из
высокая проводимость на обоих концах. Составную конструкцию иногда называют беличья клетка, а двигатели, содержащие такой ротор, называются беличьими асинхронные двигатели с клеткой. (См. Рисунок 9-84.) Асинхронный двигатель скольжения Когда ротор асинхронного двигателя подвергается вращающемуся магнитному поле, создаваемое обмотками статора, |
в продольных стержнях индуцируется напряжение.Наведенное напряжение вызывает ток течет через стержни. Этот ток, в свою очередь, производит собственное магнитное поле, которое сочетается с вращающимся полем, так что ротор принимает положение, в котором индуцированное напряжение минимизировано. В виде в результате ротор вращается почти с синхронной скоростью поле статора, разность скоростей достаточна, чтобы вызвать правильное количество тока в роторе для преодоления механических и электрические потери в роторе.Если бы ротор вращался с той же скоростью как вращающееся поле, проводники ротора не будут разрезаны никаким магнитным силовые линии, без ЭДС будет индуцироваться в них, ток не может течь, и не было бы крутящего момента. Тогда ротор замедлится. За это причина, всегда должна быть разница в скорости между ротором и вращающееся поле. Эта разница в скорости называется скольжением и выражается в процентах от синхронной скорости. Например, если ротор вращается при 1750 об / мин и синхронной скорости 1800 об / мин, разница в скорость 50 об / мин.Проскальзывание тогда равно 50/1800 или 2,78 процента.
Однофазный асинхронный двигатель
Предыдущее обсуждение относилось только к многофазным двигателям. Один фазный двигатель имеет только одну обмотку статора. Эта обмотка генерирует поле который просто пульсирует, а не вращается. Когда ротор неподвижен, расширяющееся и сжимающееся поле статора индуцирует токи в роторе. Эти токи создают поле ротора, противоположное полярности поля ротора. статор.Противостояние поля оказывает поворачивающее усилие на верхнюю и нижние части ротора пытаются повернуть его на 180 ° от своего положения. Поскольку эти силы действуют через центр ротора, вращение сила одинакова в каждом направлении. В результате ротор не вращается. Если ротор начал вращаться, он продолжит вращаться в направлении в котором он запускается, так как вращающая сила в этом направлении поддерживается по импульсу ротора.
Асинхронный двигатель с экранированными полюсами Первая попытка разработать самозапускающуюся однофазную Двигатель представлял собой асинхронный двигатель с экранированными полюсами (рисунок 9-85).У этого двигателя есть выступающие полюса, часть каждого полюса окружена тяжелое медное кольцо. Наличие кольца вызывает магнитное поле через кольцевидную часть лицевой стороны полюса, чтобы заметно отставать от этого через другую часть полюсной грани. Чистый эффект – производство небольшой составляющей вращения поля, достаточной, чтобы вызвать ротор вращаться. По мере ускорения ротора крутящий момент увеличивается до тех пор, пока номинальная скорость получается. Такие двигатели обладают низким пусковым моментом и находят их наибольшее применение в небольших двигателях вентиляторов, где начальный крутящий момент требуется низкий.На рисунке 9-86 показана схема полюса и ротора. Полюса двигателя с экранированными полюсами напоминают двигатель постоянного тока. Катушка с низким сопротивлением, короткозамкнутая или медная полоса помещается поперек один наконечник каждого небольшого полюса, от которого двигатель получает название затененного столб. Ротор этого двигателя – беличья клетка. По мере увеличения тока в обмотке статора увеличивается магнитный поток.Часть этого потока разрезает затеняющую катушку с низким сопротивлением. Это побуждает ток в затеняющей катушке, и по закону Ленца ток устанавливает поток, который противостоит потоку, вызывающему ток. Следовательно, большая часть потока проходит через незатененную часть полюсов, как показано на рисунке 9-86. |
Когда ток в обмотке и главный поток достигает максимума, скорость изменения равна нулю; таким образом, нет ЭДС. индуцируется в затеняющей катушке.Чуть позже ток затеняющей катушки, вызывающий наведенную э.д.с. отставать, достигает нуля, и нет встречного потока. Поэтому основные поток поля проходит через заштрихованную часть полюса поля.
Основной поток поля, который теперь уменьшается, индуцирует ток в затеняющая катушка. По закону Ленца этот ток создает поток, противодействующий уменьшение потока основного поля в заштрихованной части полюса. Эффект состоит в том, чтобы сконцентрировать силовые линии в заштрихованной части полюсное лицо.
Фактически, затеняющая катушка задерживает во временной фазе часть поток, проходящий через заштрихованную часть полюса. Это отставание во времени флюса в затемненном наконечнике заставляет флюс производить эффект движение по лицевой стороне шеста слева направо в направлении заштрихованного кончика. Это ведет себя как очень слабое вращающееся магнитное поле, и крутящий момент, достаточный для запуска небольшого двигателя.
Пусковой момент двигателя с экранированными полюсами очень слабый, и коэффициент мощности низкий.Следовательно, он построен в размерах, подходящих для управляя такими устройствами, как маленькие вентиляторы.
Двигатель с расщепленной фазой
Существуют различные типы самозапускаемых двигателей, известных как расщепленная фаза. моторы. У таких двигателей пусковая обмотка смещена на 90 электрических градусов. от основной или беговой обмотки. У некоторых типов пусковая обмотка имеет довольно высокое сопротивление, из-за которого ток в этой обмотке не совпадают по фазе с током в бегущей обмотке.Это условие производит, по сути, вращающееся поле и ротор вращаются. Центробежный переключатель автоматически отключает пусковую обмотку после того, как ротор достигнет примерно 25 процентов от его номинальной скорости.
Конденсаторный пусковой двигатель
С развитием электролитических конденсаторов большой емкости появилась разновидность двигателя с расщепленной фазой, известного как двигатель с конденсаторным пуском, сделал. Почти все двигатели с дробной мощностью, используемые сегодня в холодильниках, масляные горелки и другие подобные устройства относятся к этому типу.(Видеть фигура 9-87.) В этом приспособлении пусковая обмотка и ходовая обмотка имеют одинаковый размер и значение сопротивления. Фазовый сдвиг между токами двух обмоток получается с помощью конденсаторов, соединенных последовательно со стартовой обмоткой.
Двигатели с конденсаторным пуском имеют пусковой крутящий момент, сопоставимый с их крутящим моментом. при номинальной скорости и может использоваться в приложениях, где начальная нагрузка тяжелый. Опять же, требуется центробежный выключатель для отключения пускового обмотки, когда скорость ротора составляет примерно 25 процентов от номинальной скорости.
Хотя некоторые однофазные асинхронные двигатели имеют мощность до 2 л.с. (лошадиные силы), основная область применения – 1 л.с. или меньше при напряжении номинальное значение 115 вольт для меньших размеров и от 110 до 220 вольт для одной четверти л.с. и выше. Для еще большей мощности многофазные двигатели обычно б / у, так как они обладают отличными характеристиками пускового момента.
Направление вращения асинхронных двигателей
Направление вращения трехфазного асинхронного двигателя можно изменить просто поменяв местами два вывода к двигателю.Тот же эффект может быть полученным в двухфазном двигателе путем обратного подключения к одной фазе. В однофазном двигателе обратное подключение к пусковой обмотке изменит направление вращения.
Большинство однофазных двигателей общего назначения имеют для быстрого реверсирования подключений к пусковой обмотке. Ничего не может для двигателя с экранированными полюсами, чтобы изменить направление вращения, потому что направление определяется физическим расположением медной штриховки звенеть.
Если после пуска разорвется одно соединение с трехфазным двигателем, двигатель будет продолжать работать, но будет обеспечивать только одну треть номинальной мощность. Кроме того, двухфазный двигатель будет работать на половину своей номинальной мощности, если одна фаза отключена. Ни один из двигателей не запустится при этих ненормальных условия.
Синхронный двигатель
Синхронный двигатель – один из основных типов двигателей переменного тока. Нравиться
асинхронный двигатель, синхронный двигатель использует вращающийся магнитный
поле.Однако, в отличие от асинхронного двигателя, развиваемый крутящий момент не
зависят от индукции токов в роторе. Вкратце принцип
работы синхронного двигателя выглядит следующим образом: Многофазный источник
переменного тока приложено к обмоткам статора, и вращающееся магнитное поле
производится. На обмотку ротора подается постоянный ток, а другой
создается магнитное поле. Синхронный двигатель спроектирован и сконструирован таким образом
эти два поля реагируют друг на друга таким образом, что ротор
тащится и вращается с той же скоростью, что и вращающийся магнитный
поле, создаваемое обмотками статора.
Понимание работы синхронного двигателя можно получить, рассматривая простой двигатель на рис. 9-88. Предполагать что полюса A и B вращаются по часовой стрелке с помощью некоторых механических средств чтобы создать вращающееся магнитное поле, они индуцируют полюса противоположных полярность ротора из мягкого железа, и силы притяжения существуют между соответствующие северный и южный полюса. Следовательно, когда полюса A и B вращаются, ротор увлекается на такая же скорость.Однако, если к валу ротора приложена нагрузка, ротор ось на мгновение отстанет от оси вращающегося поля, но после этого будет продолжать вращаться с полем с той же скоростью, пока нагрузка остается постоянной. Если нагрузка слишком велика, ротор выйдет из строя. синхронизма с вращающимся полем и, как следствие, больше не будет вращаться с полем с одинаковой скоростью. В этом случае говорят, что двигатель перегружен. Такой простой двигатель, как показанный на рисунке 9-88, никогда не используется.В идея использования каких-либо механических средств вращения полюсов непрактична потому что для выполнения этой работы потребуется другой двигатель. Также такие расположение не требуется, потому что вращающееся магнитное поле может быть производятся электрически с использованием фазированного переменного напряжения. В этом отношении синхронный двигатель аналогичен асинхронному двигателю. |
Синхронный двигатель состоит из обмотки возбуждения статора, аналогичной у асинхронного двигателя.Обмотка статора создает вращающийся магнитный поле. Ротор может быть постоянным магнитом, как в небольших однофазных синхронных двигатели, используемые для часов и другого небольшого точного оборудования, или это может быть электромагнит, питаемый от источника постоянного тока и питаемый через скольжение кольца в обмотки возбуждения ротора, как в генераторе переменного тока. Фактически, генератор может работать как генератор переменного тока или как синхронный двигатель.
Поскольку синхронный двигатель имеет небольшой пусковой момент, некоторые средства должны быть обеспечено, чтобы довести его до синхронной скорости.Самый распространенный метод состоит в том, чтобы запустить двигатель без нагрузки, дать ему достичь полной скорости, а затем возбудить магнитное поле. Магнитное поле ротора блокируется с магнитное поле статора и двигателя работает синхронно скорость.
Величина наведенных полюсов в роторе, показанная на фигура 9-89 настолько мал, что достаточный крутящий момент не может быть развит для большинства практические нагрузки. Чтобы избежать такого ограничения работы двигателя, обмотка размещен на роторе и запитан постоянным током.Реостат, включенный последовательно с источником постоянного тока предоставляет оператору машины средства варьируя силу полюсов ротора, таким образом ставя двигатель под контроль для переменных нагрузок.
Синхронный двигатель не самозапускающийся. Ротор тяжелый и, с полной остановки, невозможно привести ротор в магнитное замок с вращающимся магнитным полем. По этой причине все синхронные у моторов есть какое-то пусковое устройство.Один из типов простых стартеров – это другой двигатель, переменного или постоянного тока, который доводит ротор примерно до 90 процентов его синхронной скорости. Затем пусковой двигатель отключается, и ротор блокируется синхронно с вращающимся полем. Другой способ запуска – вторая обмотка на роторе типа «беличья клетка». Эта индукция обмотка приводит ротор почти к синхронной скорости, и когда постоянный ток соединенный с обмотками ротора, ротор движется синхронно с полем.Последний метод используется чаще.
Двигатель сериипеременного тока
Двигатель переменного тока является однофазным, но не асинхронный или синхронный двигатель. Он похож на двигатель постоянного тока в этом у него есть щетки и коммутатор. Двигатель серии переменного тока будет работать либо на цепи переменного или постоянного тока. Напомним, что направление вращения двигатель постоянного тока не зависит от полярности приложенного напряжения, при условии, что соединения поля и якоря останутся неизменными.Следовательно, если двигатель постоянного тока подключен к источнику переменного тока, крутящий момент будет развиваться который имеет тенденцию вращать якорь в одном направлении. Однако серия постоянного тока двигатель неудовлетворительно работает от сети переменного тока в следующих случаях: причины:
1. Переменный поток вызывает большие вихревые токи и гистерезисные потери. в неизолированных частях магнитной цепи и вызывает чрезмерное нагрев и снижение эффективности.
2. Самоиндукция обмоток возбуждения и якоря вызывает низкий фактор силы.
3. Поток переменного поля создает большие токи в катушках, которые закорачиваются щетками; это действие вызывает чрезмерное искрение на коммутаторе.
Чтобы спроектировать серийный двигатель для удовлетворительной работы на переменном токе, следующие
внесены изменения:
1. Потери на вихревые токи уменьшаются за счет ламинирования полюсов поля, каркас и арматура. 2.Потери на гистерезис минимизированы за счет использования трансформаторного типа с высокой проницаемостью, листы кремнистой стали. 3. Реактивное сопротивление обмоток возбуждения поддерживается на достаточно низком уровне за счет с использованием неглубоких полюсных наконечников, нескольких витков провода, низкой частоты (обычно 25 циклов для больших двигателей), низкой плотности потока и низкого сопротивления (короткое воздушный зазор). 4. Реактивное сопротивление якоря уменьшается за счет использования компенсирующего обмотка заделана в полюсные наконечники. Если компенсирующая обмотка подключена последовательно с якорем, как показано на рисунке 9-90, якорь является токопроводящим. компенсируется. | |
| | Если компенсационная обмотка спроектирована, как показано на рисунке 9-91,
якорь имеет индуктивную компенсацию. Если двигатель предназначен для работы
в цепях постоянного и переменного тока компенсирующая обмотка включена последовательно
с арматурой. Ось компенсационной обмотки смещена от ось основного поля на угол 90 °. Это расположение похоже к компенсирующей обмотке, используемой в некоторых двигателях и генераторах постоянного тока для преодоления реакция арматуры. Компенсирующая обмотка устанавливает противодействующий магнитодвиг. силы, нейтрализующей действие магнитодвижущей силы якоря, предотвращающей искажение потока основного поля и уменьшение реактивного сопротивления якоря. Якорь с индуктивной компенсацией действует как первичная обмотка трансформатора, вторичная обмотка которого является закороченной компенсирующей обмоткой. Замкнутый вторичная обмотка получает индуцированное напряжение под действием переменного поток якоря, и результирующий ток, протекающий через витки компенсационная обмотка устанавливает противодействующую магнитодвижущую силу, нейтрализуя реактивное сопротивление якоря. |
| 5. Искры на коммутаторе уменьшаются за счет использования предохранительных проводов.
P1, P2, P3 и т. Д., Как показано на рисунке 9-92, где кольцевой якорь
показан для простоты. Когда катушки в A и B закорочены щетками,
индуцированный ток ограничен относительно высоким сопротивлением
ведет. Искры на щетках также уменьшаются за счет использования катушек якоря. имея только однооборотные и многополюсные поля. Получается высокий крутящий момент за счет наличия большого количества проводников якоря и большого диаметра якоря.Таким образом, коммутатор имеет большое количество очень тонких коммутаторных стержней и напряжение якоря ограничено примерно 250 вольт. Двигатели переменного тока с дробной мощностью называются универсальными двигателями. У них нет компенсационных обмоток или предохранительных проводов. Они используются широко использовать вентиляторы и переносные инструменты, такие как дрели, шлифовальные машины, и пилы. |
Быстрый ответ: что такое трехфазный синхронный двигатель?
Посмотреть все
Для чего используется синхронный двигатель?
Малые синхронные двигатели используются в устройствах хронометража, таких как синхронные часы, таймеры в приборах, магнитофонах и прецизионных сервомеханизмах, в которых двигатель должен работать с точной скоростью; Точность скорости – это точность частоты линии электропередачи, которая тщательно контролируется в большой взаимосвязанной сети
В чем разница между синхронным и асинхронным двигателем?
Синхронный двигатель – это машина, скорость ротора которой равна скорости магнитного поля статора.Асинхронный двигатель – это машина, ротор которой вращается со скоростью меньше синхронной. Синхронный двигатель не имеет пробуксовки.
Сколько существует типов синхронных двигателей?
два
В чем разница между синхронным двигателем и синхронным генератором?
Нет принципиальной разницы между синхронным двигателем sm и синхронным генератором sg. Все они являются синхронными машинами, первая из которых преобразует электрическую энергию в механическую, а последняя преобразует механическую энергию в электрическую.
Почему он называется синхронным двигателем?
Это связано с тем, что двигатель называется синхронным двигателем. Это двигатель с постоянной скоростью, потому что, несмотря на увеличение нагрузки, двигатель работает с той же синхронной скоростью. Как следует из названия, синхронная машина работает с синхронной скоростью (Synch.
Почему возбуждение всегда постоянное?
Для успешной работы генератора он должен выдавать синусоидальное переменное напряжение определенной частоты.Теперь возбуждение постоянным током создает электромагнит фиксированной полярности в поле, которое движется с постоянной скоростью от первичного двигателя. Таким образом, якорь статора создает почти синусоидальный переменный ток.
Каковы преимущества синхронного двигателя?
Преимущество использования синхронного двигателя – возможность контролировать коэффициент мощности. Синхронный двигатель с избыточным возбуждением имеет опережающий коэффициент мощности и работает параллельно с асинхронными двигателями, тем самым улучшая коэффициент мощности системы. Скорость остается постоянной независимо от нагрузки в синхронных двигателях.
Как запускается синхронный двигатель?
Когда на двигатель подается трехфазное питание, двигатель начинает работать как асинхронный со скоростью ниже синхронной. Через некоторое время на ротор подается постоянный ток. Через некоторое время двигатель приводится в синхронизм и начинает работать как синхронный двигатель.
Какие типы двигателей?
К наиболее распространенным электродвигателям, используемым сегодня, относятся:
- Бесщеточные двигатели переменного тока.Бесщеточные двигатели переменного тока – одни из самых популярных в управлении движением.
- Двигатели постоянного тока с щеткой. В щеточном двигателе постоянного тока ориентация щетки на статоре определяет ток.
- Бесщеточные двигатели постоянного тока.
- Прямой привод.
- Линейные двигатели.
- Серводвигатели.
- Шаговые двигатели.
Какие основные части синхронного двигателя?
Статор и ротор – две основные части синхронного двигателя. Статор – это неподвижная часть, а ротор – это вращающаяся часть машины.
Что подразумевается под асинхронным двигателем?
Определение асинхронного двигателя. : двигатель переменного тока, в котором крутящий момент создается реакцией между изменяющимся магнитным полем, создаваемым в статоре, и током, индуцируемым в катушках ротора.
Какова синхронная скорость двигателя?
В двигателе синхронная скорость – это скорость, с которой вращается магнитное поле. В зависимости от конструкции двигателя фактическая механическая скорость может быть эквивалентной (синхронный двигатель) или немного меньшей (асинхронный двигатель).Синхронная скорость является функцией: используемой электрической частоты, обычно 60 Гц или 50 Гц.
Двигатели постоянного тока самозапускаются?
Двигатель постоянного тока – это самозапускающиеся двигатели. Якорь неподвижен, и магнитное поле вращается в двигателе переменного тока, но в двигателе постоянного тока якорь вращается, и магнитное поле остается неподвижным.
Синхронный двигатель переменного или постоянного тока?
Ответ – нет. Синхронные двигатели предназначены для саморегулирования своей скорости относительно частоты сети переменного тока.
