
Уроки Arduino. Делаем датчик расстояния с бипером и светодиодной индикацией
Набор СкАРТ УМНЫЙ ДОМ
Набор СкАРТ УМНЫЙ ДОМ Представляем Вашему вниманию второй продукт серии Скарт- ЛАБ “Умный дом” Набор СкАРТ ЛАБ УМНЫЙ ДОМ предназначен для тех, кто уже прошел первый этап ознакомления с аппаратными и програмными
ПодробнееТема 2. Работа с цифровыми сигналами
Тема 2. Работа с цифровыми сигналами Урок 2.1. Выводы общего назначения (GPIO) У контроллера Arduino Uno есть множество выводов, обозначенных цифрами от 0 до 13 и от A0 до A5. Каждым из этих выводом мы
ПодробнееТема 2. Работа с цифровыми сигналами
Тема 2. Работа с цифровыми сигналами Урок 2.
Информационное табло на основе LED матриц
Кафедра «Автопласт» при ФГБОУ ВПО «Госуниверситет-УНПК» Научно-образовательная лаборатория «Управление в технических системах» Информационное табло на основе LED матриц Подготовили студенты: группы 21-АП
ПодробнееЭксперименты с программированием. 1.Введение и подготовка к работе. Arduino – это контроллер (управляющий модуль). На плате контроллера размещены процессор, микросхема конвертора USB и выводы для подключения
ПодробнееIskra Mini. Подключение и настройка
Iskra Mini Iskra Mini это миниатюрная платформа на базе микроконтроллера ATmega328 для разработки и программирования электронных устройств, где важен каждый миллиметр свободного пространства.
Драйвер шагового двигателя (Troykaмодуль)
Драйвер шагового двигателя (Troykaмодуль) Для управления шаговым двигателем при помощи микроконтроллера нужно не только управлять большой нагрузкой, но и обеспечить необходимую последовательность управляющих
ПодробнееUNO STARTER KIT ИНСТРУКЦИЯ
Версия 1.03 от 26.12.2017 UNO STARTER KIT ИНСТРУКЦИЯ НА РУССКОМ Содержание 1. Состав набора 2. Основная плата arduino uno 3. Среда программирования Arduino IDE 4. Первая программа: мигание светодиодом
Оглавление Предисловие… 3
1 Robo-Муравей Оглавление Предисловие… 3 Введение… 3 Оборудование… 4 Создание платформы… 5 Проверка и позиционирование сервоприводов… 5 Стенд проверки сервоприводов…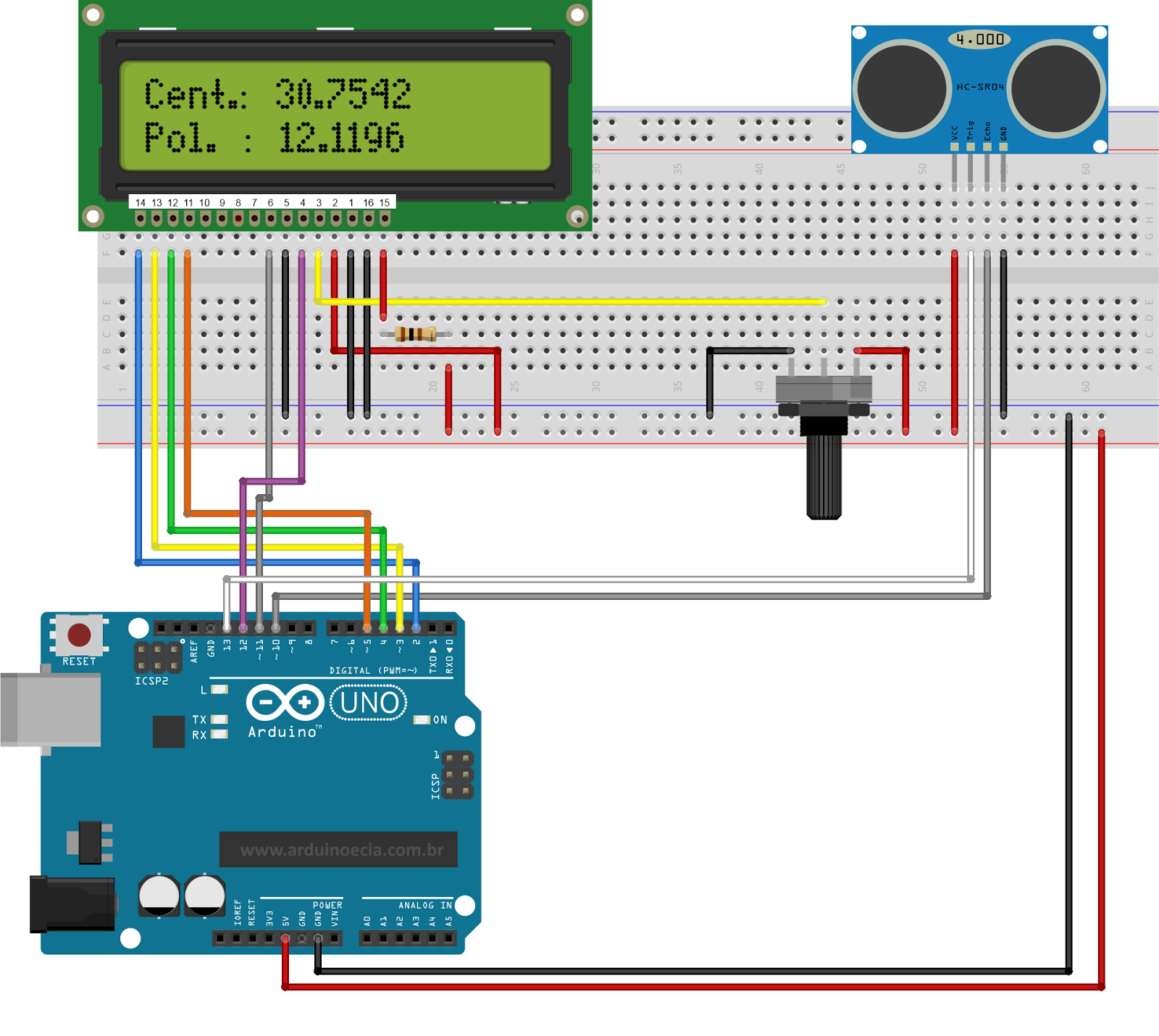 5 Проверка… 6 Сборка…
5 Проверка… 6 Сборка…
Громкость (на заданном расстоянии)
Практическая работа 6 Проект Терменвокс В этом эксперименте мы имитируем действие музыкального инструмента терменвокс: изменяем высоту звучания бесконтактным путем, больше или меньше закрывая от света
ПодробнееТема 1. Знакомство с Arduino
Тема 1. Знакомство с Arduino Урок 1.1. Макетный стенд Arduino и редактор программ 1.1.1. Основные элементы Arduino Uno Микроконтроллер аналог микропроцессора в обычном ПК; Кнопка сброса осуществляет сброс
ПодробнееAS-kit Hardware. Работа с адаптером AS-con6
Работа с адаптером AS-con6 Для внутрисхемного программирования своих AVR-микроконтроллеров компания Atmel предложила два варианта разъема: 6-контактный и 10-контактный. В 6-контактном разъеме присутствуют
ПодробнееArduino Motor Shield R3
Arduino Motor Shield R3 Модуль Arduino Motor Shield R3 предназначен для управления различными индуктивными нагрузками: одновременно двумя двигателями постоянного тока или одним шаговым, соленоидами, реле,
ПодробнееКаркас корпуса и датчики
ЭТАП 83.
Тестовые задания Макс. балл
ЗАДАНИЯ МОСКОВСКОЙ ОЛИМПИАДЫ ШКОЛЬНИКОВ ПО ТЕХНОЛОГИИ НОМИНАЦИЯ «УМНЫЙ ДОМ» 2017 2018 г. (9 11 классы) Методика оценивания выполнения тестовых олимпиадных заданий теоретического тура Тестовые задания Макс.
ПодробнееДатчик тока (Troyka-модуль)
Датчик тока (Troyka-модуль) Используйте датчик тока (Troyka-модуль) для контроля потребления тока, фиксируйте блокировку моторов или аварийное обесточивание системы. Работа с высоким напряжением опасна
ПодробнееЭффект дребезга. Схема подключения
Практическая работа 8 Мерзкое пианино В этом эксперименте мы создаем маленькую клавиатуру, на которой можно сыграть несколько нот.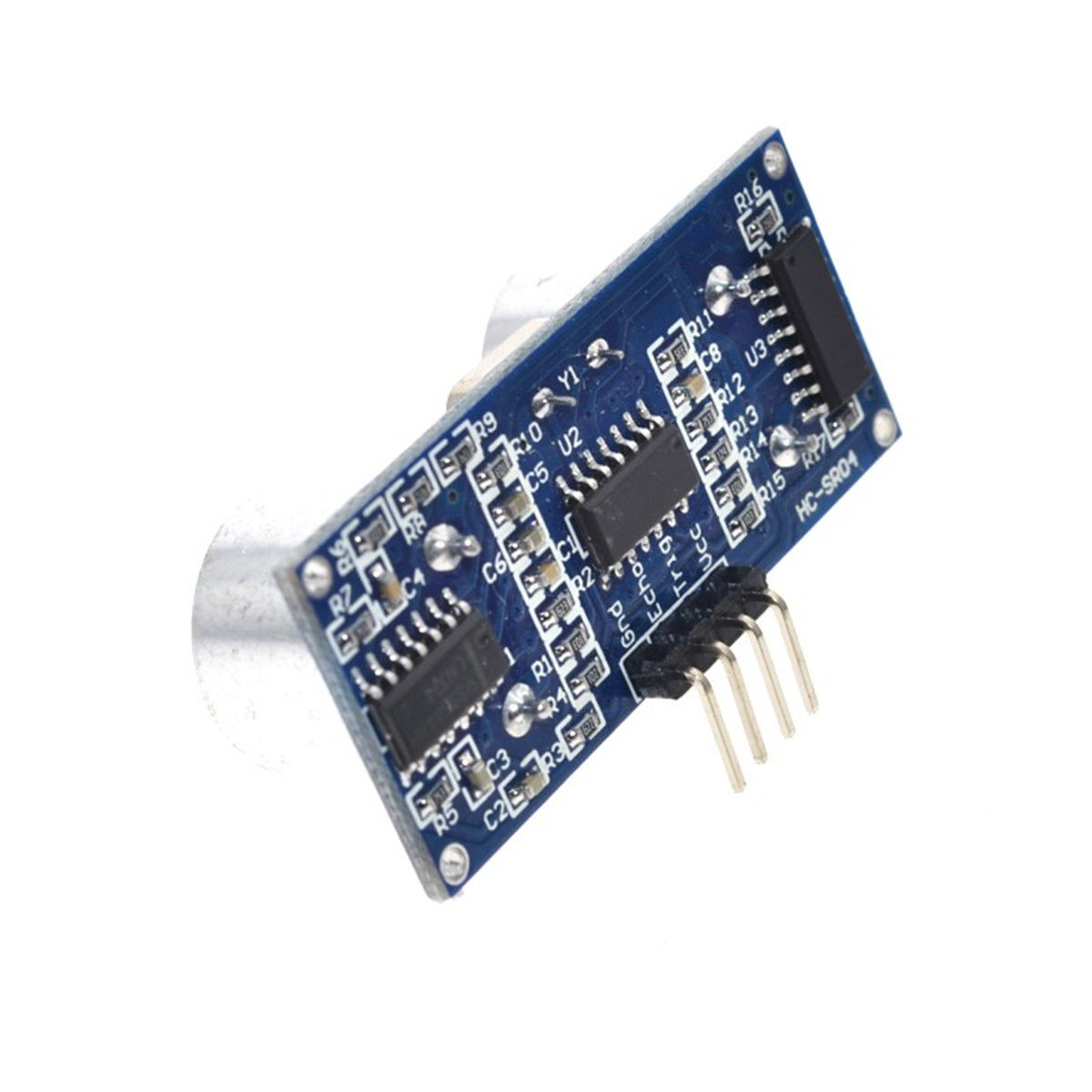 Тактовая кнопка простой, всем известный механизм, замыкающий цепь пока
Тактовая кнопка простой, всем известный механизм, замыкающий цепь пока
Движение робота по черной линии.
Движение робота по черной линии. Движение робота по линии – самый популярный эксперимент начинающего роботостроителя. Для того, что бы наш робот мог двигаться по полю с черной линией нам необходимы уже
Подробнее3 повсеместное проникновение Wi-Fi;
Умный дом 9-11 1. Задача 1 Определите один правильный ответ Что понимается под термином «интернет всего»? 1 рост объёмов информации в интернете; 2 появление универсального провайдера, обеспечивающего связью
ШИМ. Регулировка скорости движения.
ШИМ. Регулировка скорости движения. Метод широтно импульсной модуляции (ШИМ, англ. pulse-width modulation (PWM)) широко применяется для управления мощностью, подводимой к нагрузке, путём изменения скважности
ПодробнееКонструктор электронный На основе Arduino
Федеральное государственное автономное образовательное учреждение высшего образования «Национальный исследовательский Томский политехнический университет» ЮТИ ТПУ Конструктор электронный На основе Arduino
ПодробнееИНСТРУКЦИЯ ПОЛЬЗОВАТЕЛЯ JT5.
 RU
RU«Cosmo USB Host» ИНСТРУКЦИЯ ПОЛЬЗОВАТЕЛЯ JT5.RU БЛАГОДАРИМ ЗА ПОКУПКУ! Поздравляем с приобретением платы-расширения «Cosmo USB Host» предназначенной для организации связи с USB устройствами. Шилд совместим
ПодробнееДетали корпуса и датчик
ИНСТРУКЦИЯ ПО СБОРКЕ ЭТАП 82. КОМПЛЕКТУЮЩИЕ Детали корпуса и датчик С этим выпуском вы получили множество деталей корпуса R2 D2, в том числе две инструментальные ниши, а также передатчик и приёмник ультразвукового
ПодробнееME-mikroPROG for AVR
ME-mikroPROG for AVR mikroprog для AVR – это быстрый USB программатор, который подходит для программирования микроконтроллеров семейства AVR от Atmel. Отличная производительность, простота в эксплуатации
ПодробнееПодключение I2C датчика к LabView
Dr.
Робот-манипулятор механическая рука
Робот-манипулятор механическая рука Робот-манипулятор MeArm карманная версия промышленного манипулятора. MeArm – простой в сборке и управлении робот, механическая рука. Манипулятор имеет четыре степени
ПодробнееЭлементы платы. Питание
Motor Shield Микроконтроллер, установленный на Arduino не может непосредственно управлять большой нагрузкой на своих цифровых выходах. Максимально возможный выходной ток с ножки микроконтроллера – 40мА.
ПодробнееОбразовательный набор «Амперка»
Образовательный набор «Амперка» уникальный продукт, предназначенный для школ и «кружков» Что это Набор представляет собой готовый учебный курс.
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА Учебные конструкторы Лего уже не первый год используются в образовательном процессе. Это дает возможность развития у ученика творческого мышления, формирует инженерный подход при
ПодробнееПроект 3. Светильник, управляемый по USB В этом проекте отправляются устройству команды, как ему светит. Список деталей: 1 плата Arduino Uno 1 беспаечная макетная плата 1 светодиод 1 резистор номиналом
Подробнее Руководство по установке
Эмулятор Auto PASS V2 Руководство по установке Краткое описание Эмулятор Auto PASS V2 предназначен для имитации исправной системы доочистки выхлопных газов (SCR) автомобилей марок: DAF, IVECO, FORD Cargo,
ПодробнееПодключение ультразвукового датчика датчика HS-SR04 к Arduino
Ну что, продолжая изучение Ардуино и как следствие альтернатив на счет подключения возможных датчиков, добрался я и до ультразвукового датчика HS-SR04.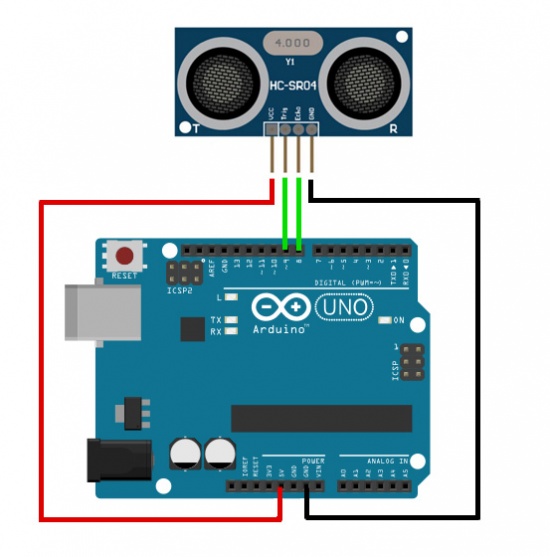 В целом его использование в купе с Ардуинкой начиная с подключения и заканчивая пробными экспериментами прошло без проблем, поэтому этот датчик однозначно можно отнести в разряд беспроблемных!
В целом его использование в купе с Ардуинкой начиная с подключения и заканчивая пробными экспериментами прошло без проблем, поэтому этот датчик однозначно можно отнести в разряд беспроблемных!
Итак, все же для истории и для заметки я чиркну пару строк на этот счет.
Характеристика датчика HS-SR04
Что же пару слов о не особо интересном, но явно полезном, если вдруг появятся проблемы с датчиком.
Напряжение питания: 5 В
Потребление в режиме тишины: 2 мА
Потребление при работе: 15 мА
Диапазон расстояний: 2–400 см
Эффективный угол наблюдения: 15°
Рабочий угол наблюдения: 30°
Если наглядно, то датчик работает примерно так.
Есть излучатель и есть приемник. И тут собственно происходит обычное анализирование между временем когда сигнал был отправлен и когда получен. В итоге по этому времени и считается расстояние между датчиком и препятствием. И здесь естественно сигнал исходящий должен быть импульсным с определенными перерывами между импульсами, ведь только в этом случае мы сможем узнать о конкретном времени передачи сигнала, то есть появиться возможность разделить “порционно” не только передачу, что не особо важно, а именно прием.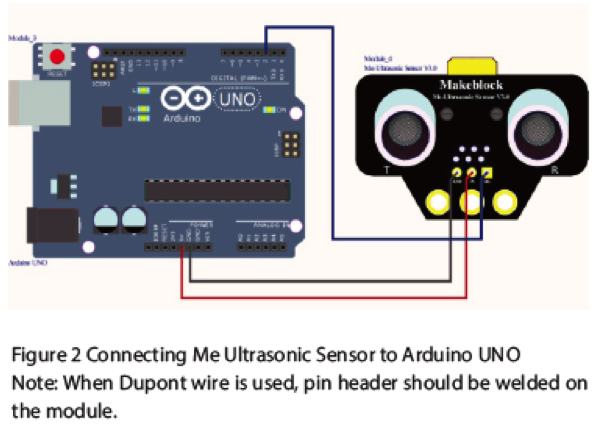 И здесь уже можно понять, что определенная изначальная передача сигнала была привязана именно к данному конечному приему этого же сигнала. Если же было постоянное излучение, то расстояние можно было определять лишь по уровню приходящего сигнала, а не по времени, что явно менее выигрышное в алгоритме определения расстояния.
И здесь уже можно понять, что определенная изначальная передача сигнала была привязана именно к данному конечному приему этого же сигнала. Если же было постоянное излучение, то расстояние можно было определять лишь по уровню приходящего сигнала, а не по времени, что явно менее выигрышное в алгоритме определения расстояния.
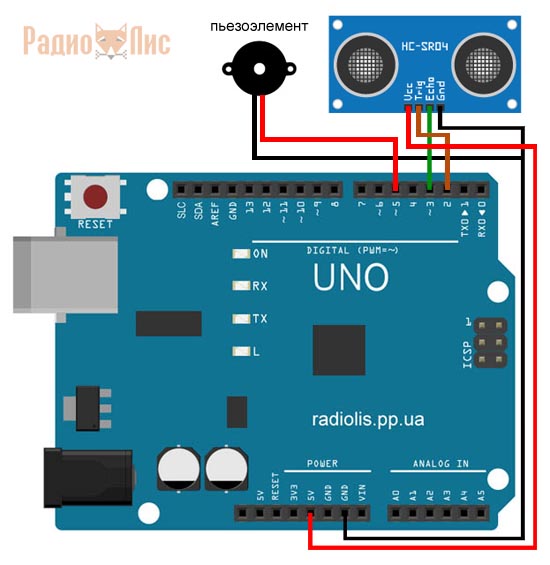
Теперь же к схеме подключения, хотя в случае с Ардуино это все условности, ведь схема может весьма гибко и быстро меняться, исходя из программы.
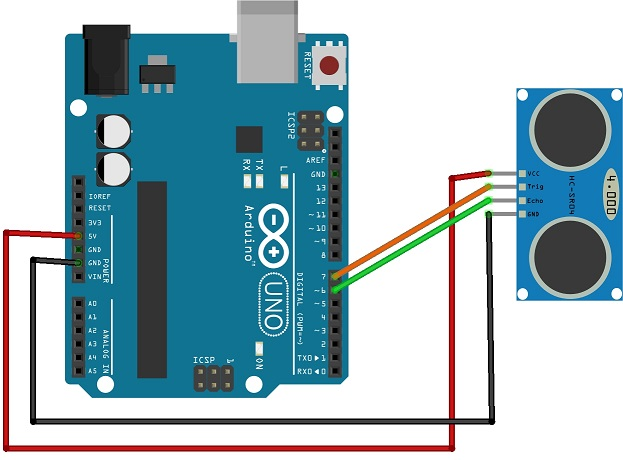
Электрическая схема подключения HS-SR04 к Ардуино
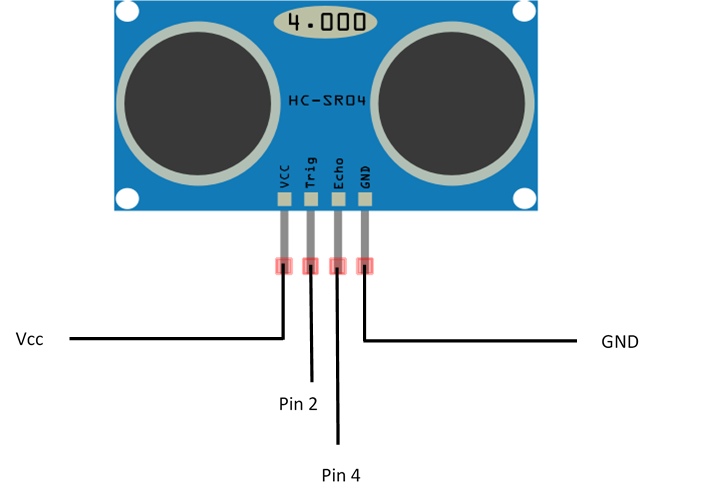
Если речь пошла о подключении, то сразу о выводах на датчике.
Контакт питания положительного типа – +5В;
Trig (Т) – выход сигнала входа;
Echo (R) – вывод сигнала выхода;
GND – вывод «Земля».
Собственно из 4 пинов два используются для питания, и два для обмена данными. Как и было сказано подключение во 2 и 4 вывод весьма условны, так как их можно переписать в скетче, о котором и поведаю далее.
Скетч для работы с датчиком HS-SR04
Сам скетч предполагает срабатывание светодиода, то есть что он загорится, когда до препятствия останется указанная дистанция.![]() Собственно пояснения можно найти в самом скетче, в общем открываем его и смотрим.
Собственно пояснения можно найти в самом скетче, в общем открываем его и смотрим.
Смотреть скетч для HS-SR04
* – в скетче 0,034 это как раз расстояние которое проходит звук, но не в секундах, а в мкс и там же если посмотрите оно делится пополам, так как звуку надо еще вернуться обратно.
Ну и когда расстояние становится вновь больше указанного, то само собой светодиод гаснет. По мне так все просто. Для датчика существуют библиотеки, которые позволяют ему работать более корректно в случае с нежелательным отраженным сигналом (эхо). Меня на настоящий момент это не особо интересовало, поэтому библиотеки я себе не брал. Все работает без них.
Ультразвуковой датчик измерения расстояний HC-SR04
Самым распространенным датчиком для измерения расстояния в диапазоне от 2 см до 400 см во всевозможных Arduino проектах является ультразвуковой локатор HC-SR04. Этот датчик был приобретен на Ru.aliexpress.com
ультразвуковой локатор HC-SR04 на АлиАвтор неоднократно приобретал у этого производителя, как датчики данного типа, так и другие устройства, при этом никаких проблем ни с доставкой, ни с комплектацией, ни с работоспособностью устройств не возникало.
Технические характеристики HC-SR04
- Напряжение: 5 В (DC)
- Рабочий ток: менее 2 mA.
- Выход сигнал: высокий уровень 5 В, низкий уровень 0 В.
- Угол: не более 15 градусов.
- Расстояние обнаружения: 2 — 450 см.
- Высокая точность: до 0.3 см
- Вход триггера сигнала: 10 мкс TTL импульс
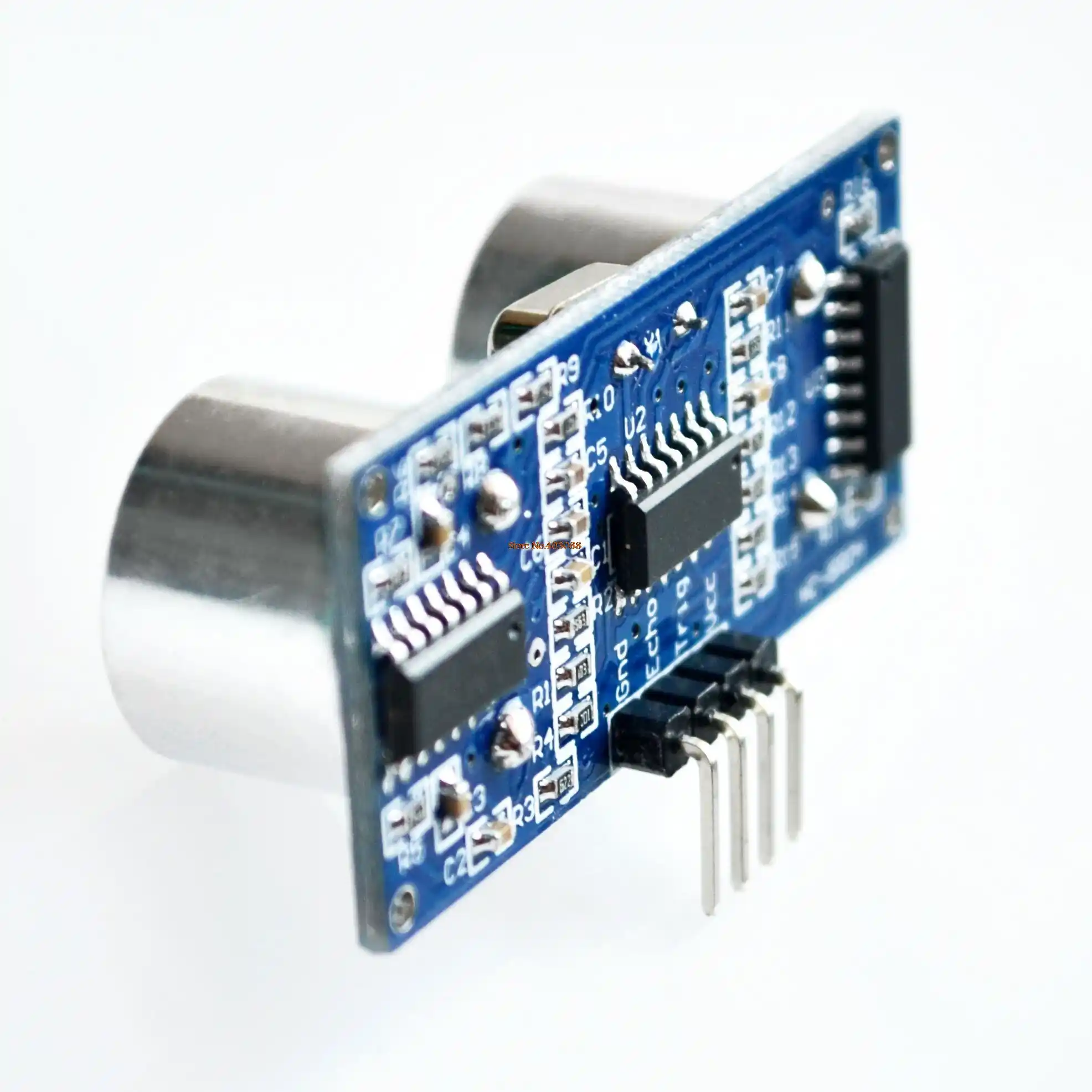
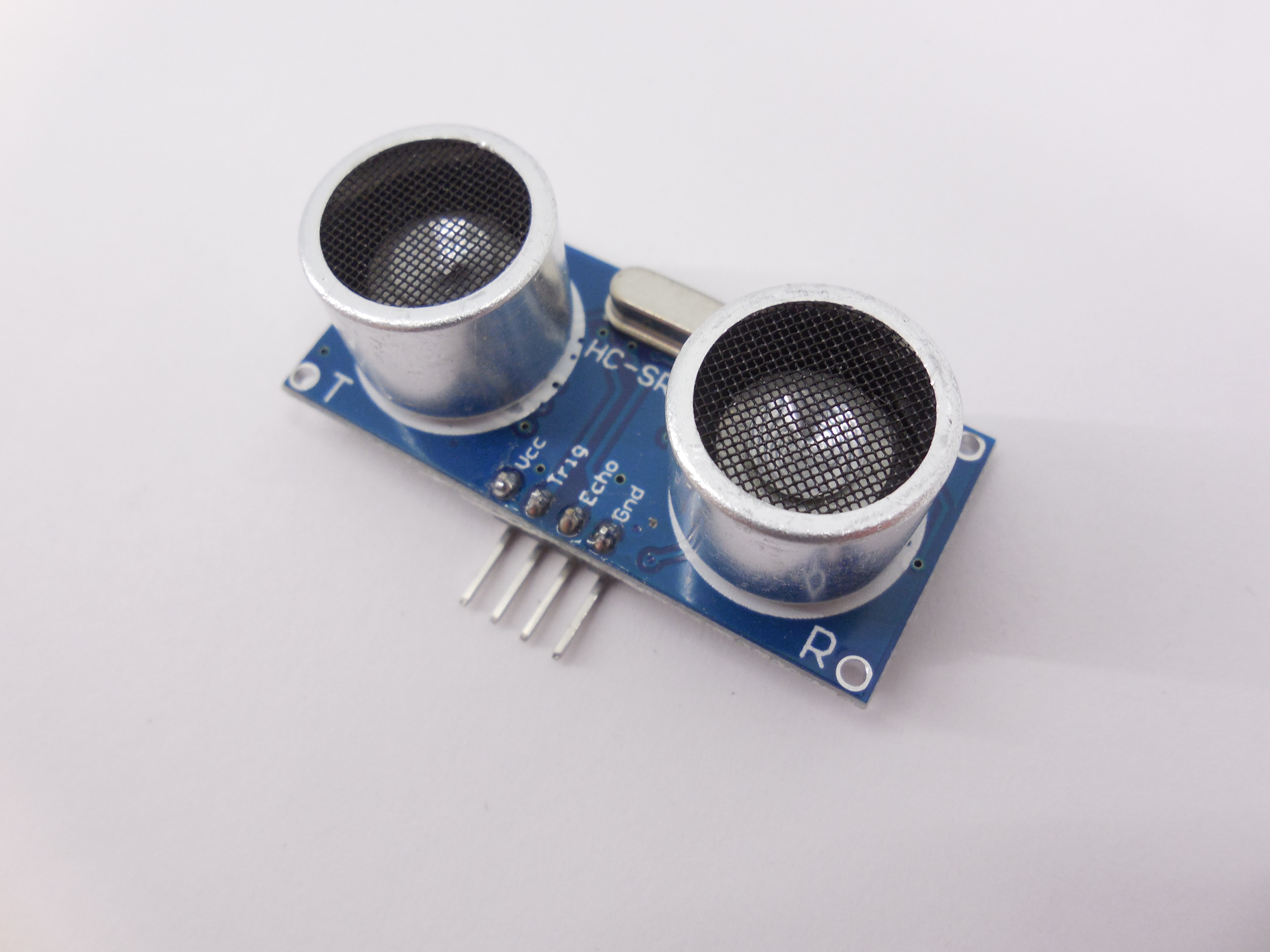
Конструктивно датчик представляет собой печатную плату, на которой размещены все компоненты устройства, в первую очередь на плате хорошо заметны излучатель и приемник ультразвуковых волн. Размер датчика 20 х 40 х 15 мм, масса 8,3 г.
ультразвуковой датчик HC-SR04
Устройство излучает серию ультразвуковых импульсов на частоте 40 кГц [1-3]. Угол зрения датчика составляет около 15 градусов. Для инициализации цикла измерения надо в течении 10 мкс на вход датчика Trig подать высокий логический уровень. После этого устройство излучит 8 пачек ультразвуковых импульсов. По длительности эха можно судить о расстоянии до препятствия, это расстояние кодируется длительностью импульса, поступающего на выход Echo.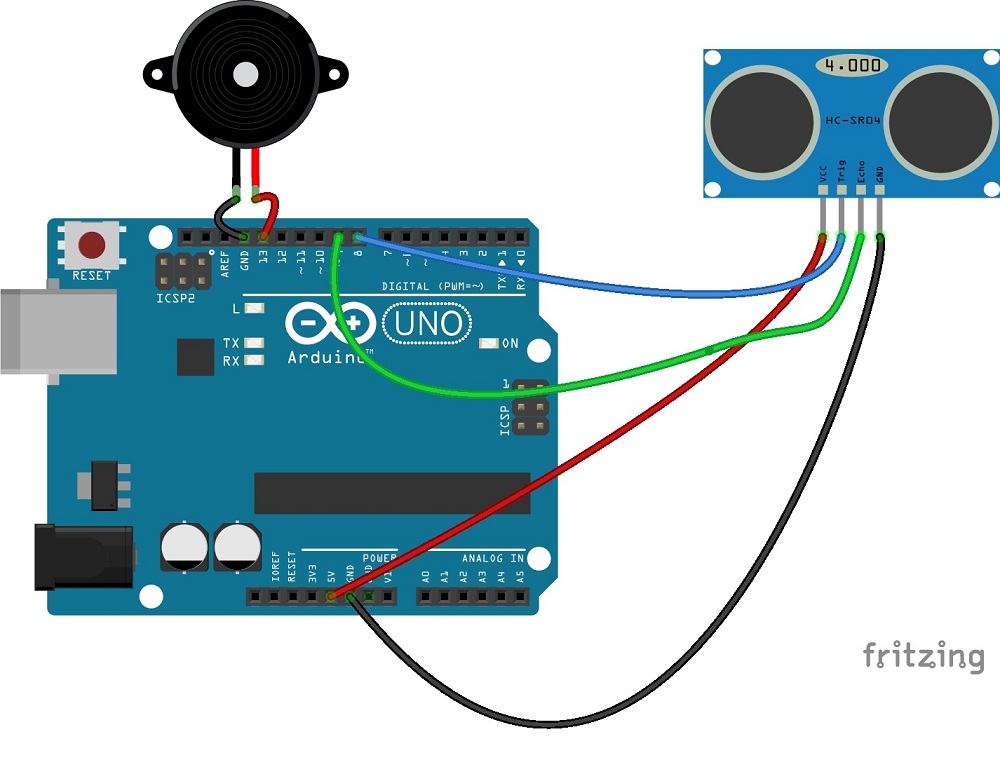 Если препятствие не обнаружено, то длительность импульса составляет 38 мс.
Если препятствие не обнаружено, то длительность импульса составляет 38 мс.
Подключение HC-SR04 к Arduino
Для использования датчика вместе с аппаратной платформой Arduino существует специальная библиотека Ultrasonic [4], которая берет на себя все рутинные операции по управлению датчиком и сразу возвращает расстояние в сантиметрах. Впрочем, логика работы датчика не очень сложна, так что программу, управляющую работой датчика можно реализовать самостоятельно. Тем более, что данная библиотека позволяет работать только с одним датчиком, а зачастую для нормальной ориентации роботу может потребоваться несколько датчиков [5].
ультразвуковой локатор с АрдуиноДатчику необходимо напряжение питания 5 В, ток потребления составляет 3 мА.
Испытания УЗ детектора
При использовании данного типа датчика были отмечены следующие особенности:
- Датчик не может адекватно измерить расстояние до ворсистой поверхности, видимо потому, что такая поверхность хорошо рассеивает и поглощает ультразвуковые импульсы и не дает нормального эха.

- Сетки закрывающие переднюю, часть ультразвукового излучателя и приемника механически не очень прочны и могут быть сравнительно легко продавлены, впрочем, это не сказалось на работоспособности датчика.
В целом, HC-SR04 отличный недорогой датчик, который может стать основным «зрением» робота в пределах небольшой комнаты, так же его можно применить для измерения уровня жидкости, в системах сигнализации и т.п. Специально для сайта «2 Схемы» — Denev.
- http://robocraft.ru/blog/electronics/772.html
- https://arduino-kit.ru/userfiles/image/HC-SR04%20_.pdf
- http://amperka.ru/product/hc-sr04-ultrasonic-sensor-distance-module
- https://code.google.com/archive/p/robocraft/
- Лекомцев Д.Г. Arduino. Подключение типовых внешних устройств. – Радио, 2016, №11, с. 51-54
ARDUINO И ПАРКТРОНИК | ArduinoKit
Интересный пример использования Arduino UNO в качестве парктроника. В качестве ультразвукового датчика используем HC-SR04.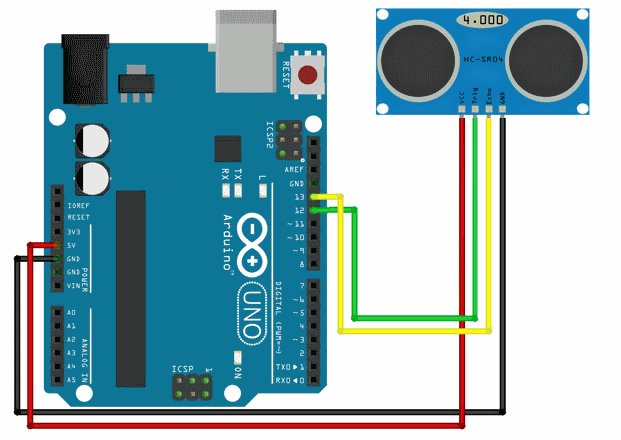
Ничего особенного в использовании и настройке нет, даже напротив — всё очень просто. Я надеюсь что вопрос — Как настроить Ultrasonic Sensor? Где взять скетч для сенсора HC-SR04? После прочтения этой статьи больше не возникнет.
Парктроник на Arduino. Урок 8
Представляю вам схему сборки проекта «Парктроника», на ардуино уно. Для этого урока — проекта нам понадобится несколько светодиодов, резисторы, ультразвуковой датчик, Arduino и примерно 30 минут свободного времени.
Схема соединений. Парктроник на Arduino
Что необходимо для этого урока:
Arduino Uno R3 — 1 шт.
Резисторы 200-520 Ом. — 10шт.
Светодиоды:
Зеленые — 3 шт.
Синие — 3 шт.
Желтые — 2 шт.
Красные — 2 шт.
Ультразвуковой датчик измерения расстояния HC-SR04 — 1шт.
Модуль HC-SR04, позволяет измерять расстояния в приличном диапазоне, причём, достаточно точно.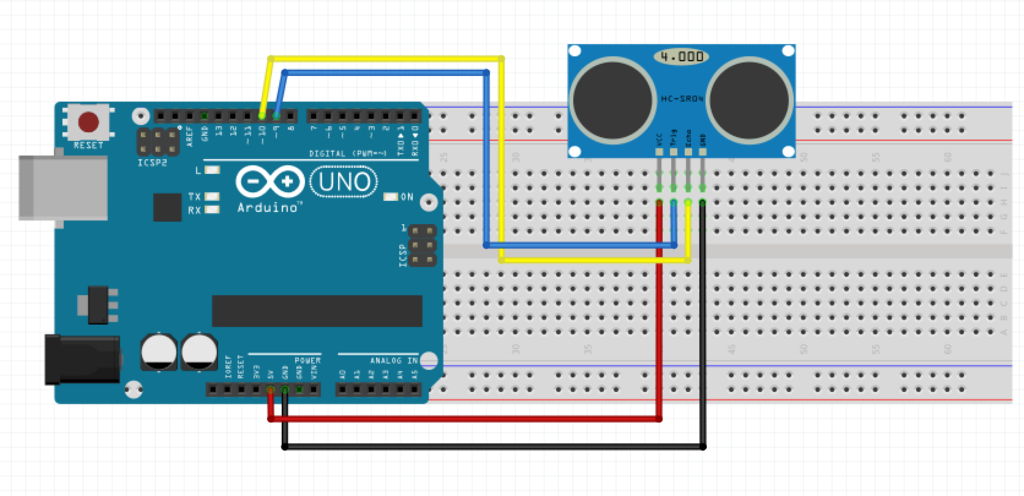 Расстояние до преграды которое он определяет колеблется от 2см до 400см, с шагом 0,3см. Напряжение питания 5V. Его работе не мешает солнечный свет. Но что что мешает, так это мягкие шторы — тюль, и домашние животные, расстояние до них он определяет с ошибками.
Расстояние до преграды которое он определяет колеблется от 2см до 400см, с шагом 0,3см. Напряжение питания 5V. Его работе не мешает солнечный свет. Но что что мешает, так это мягкие шторы — тюль, и домашние животные, расстояние до них он определяет с ошибками.
Индикатором работы парктроника являются светодиодные индикаторы — расстояние более 1 метра — зелёные, каждый последующий зажигаетя при изменеии растояния на 10 см. Последний красный загораетя, если расстояние сократилось и стало менее 10см. Индикация осуществляется как в светодиодном индикаторе пиковой мощности.
Скачать скетч, в комплекте с библиотекой Ultrasonic.h можно с сайта ArduinoKit.Ru, библиотеку, если она у вас не установлена, нужно положить в в каталог Ultrasonic, в c:Program Files (x86)Arduinolibraries.
Скетч заливаем в ардуино, через USB.
Законченный урок — Парктроник из Arduino
Как Arduino работает с ультразвуковым датчиком?
Как автоматически включается свет в коридоре? Почему автоматические двери открываются, когда вы приближаетесь? Почему кран лавабо может включаться и выключаться автоматически? Думаю, у вас хватит уверенности сказать: “Я знаю!” Потому что у всех есть датчики!
Да, это из-за датчика, но знаете ли вы, как датчик работает? Как он обнаружил ваше присутствие? В сегодняшней статье мы разделим большую концепцию датчиков на отдельные части.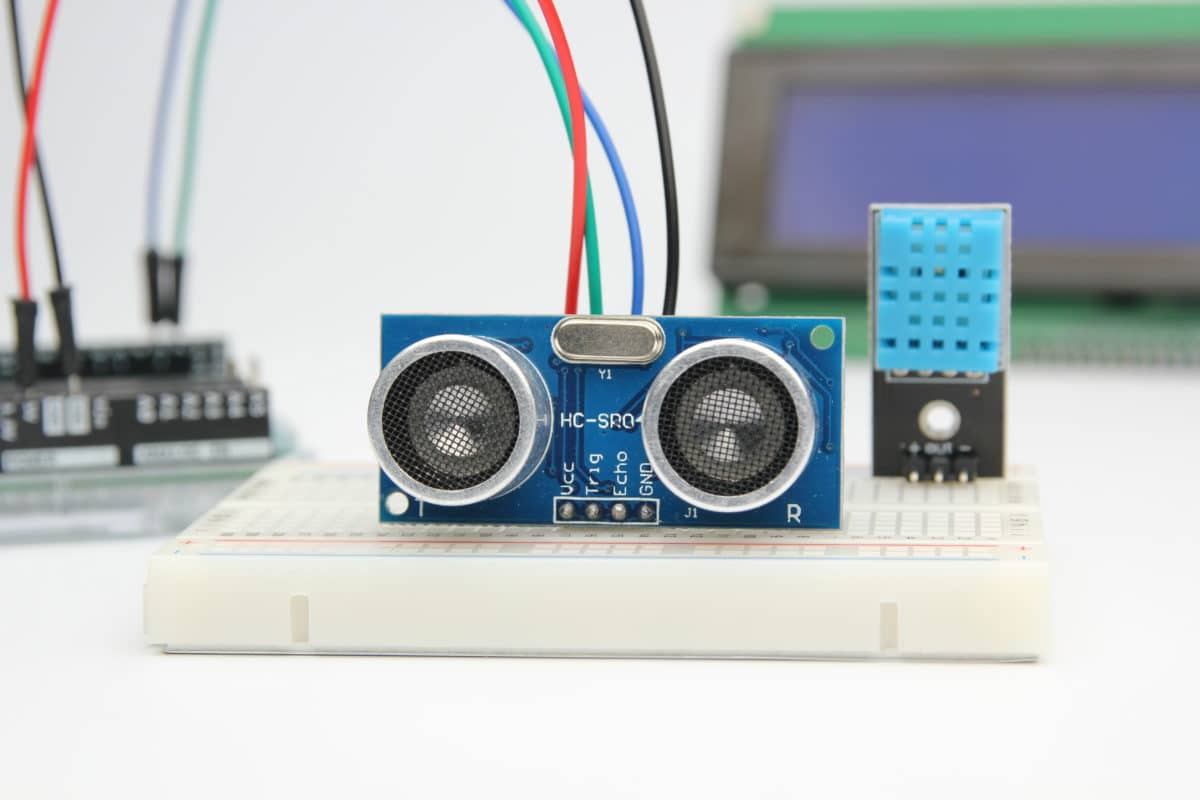 Например, что датчик использует для определения расстояния и как полученные данные отправляются обратно?
Например, что датчик использует для определения расстояния и как полученные данные отправляются обратно?
Этот блог будет охватывать:
- Принципы ультразвукового датчика для определения расстояния
- Подробная информация об ультразвуковых датчиках и их функциях
- Как ультразвуковой датчик работает с Arduino
- Выбор ультразвукового датчика – ультразвуковой датчик Grove или HC-SR04?
- Проекты и приложения Arduino с ультразвуковым датчиком
Arduino и ультразвуковой датчик – как они работают вместе?
Введение в ультразвуковой датчик
Если у вас есть машина, задний радар очень поможет вам в повседневной жизни, не так ли? Это точнее, чем невооруженным глазом, и намного удобнее.
Радар определяет расстояние с помощью ультразвукового датчика, но как именно работает ультразвуковой датчик?
Ультразвуковой датчик излучает ультразвук с частотой 40000 Гц, который распространяется по воздуху и отскакивает, если на его пути есть объект или препятствие.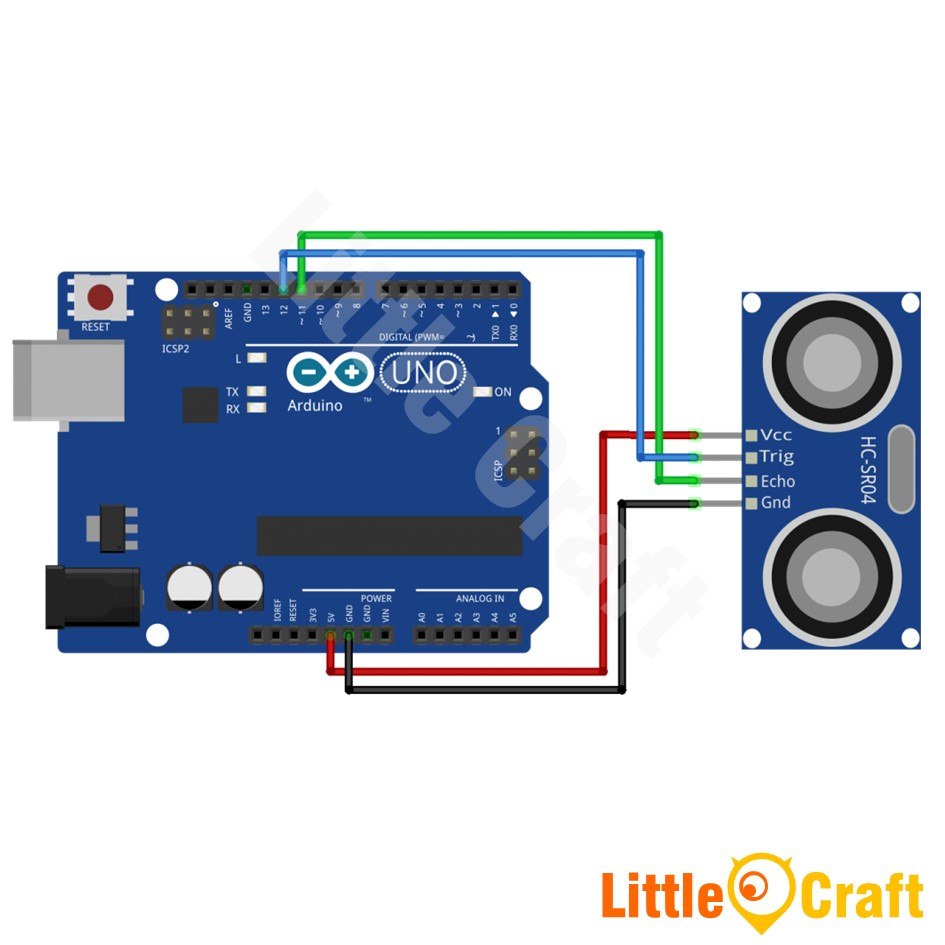 Когда датчик принимает отраженную волну, расстояние может увеличиваться за счет скорости звука и времени. Используя формулу, расстояние = скорость x время.
Когда датчик принимает отраженную волну, расстояние может увеличиваться за счет скорости звука и времени. Используя формулу, расстояние = скорость x время.
Параметры ультразвукового датчика Grove
Ультразвуковой датчик расстояния Grove может измерять расстояние от 3 см до 350 см с точностью до 2 мм.Это идеальный ультразвуковой модуль для измерения расстояния, датчиков приближения и ультразвуковых детекторов.
Технические данные:
Как подключить Arduino к ультразвуковому датчику Grove
- Подключите Ultrasonic Ranger к порту D7 Grove-Base Shield
- Подключите Grove – Base Shield к Seeeduino
- Подключите Seeeduino к ПК через USB-кабель
Все приведенные выше списки продуктов доступны в Seeed Studio.
- Контакты ввода-вывода : наш продукт объединяет однокристальный микрокомпьютер , а передающий и принимающий сигнал делят один вывод за счет мультиплексирования с временным разделением, поэтому занят только одним выводом ввода-вывода .

- Напряжение : HC-SR04 поддерживает только напряжение 5 В , а ультразвуковой датчик расстояния Grove поддерживает 5 В и 3,3 В .
- Сопряжение : Grove – ультразвуковой датчик расстояния можно напрямую подключить к вводу / выводу Raspberry Pi (3,3 В), тогда как для HC-SR04 требуется схема преобразования напряжения.
- Бонус : Seeed предоставляет полных документов и библиотек для Arduino, Python и Codecraft, позволяет легко использовать наш Grove – ультразвуковой датчик расстояния с Arduino и Raspberry pi.
Таким образом, нет причин не выбрать наш ультразвуковой датчик расстояния Grove, если вам нужен более удобный и универсальный ультразвуковой датчик!
Проекты и приложения Arduino с ультразвуковым датчиком
Играйте с Arduino
После того, как вы получили все упомянутые выше продукты и соединили их, вы можете приступить к следующим проектам:
от Seeed Studio
Если вам нужна помощь с загрузкой кода, вы можете узнать, как загрузить код.
- Шаг 4. Мы сможем увидеть отображение расстояния на терминале, как показано:
Arduino – Ультразвуковой датчик
от Tutorialspoint
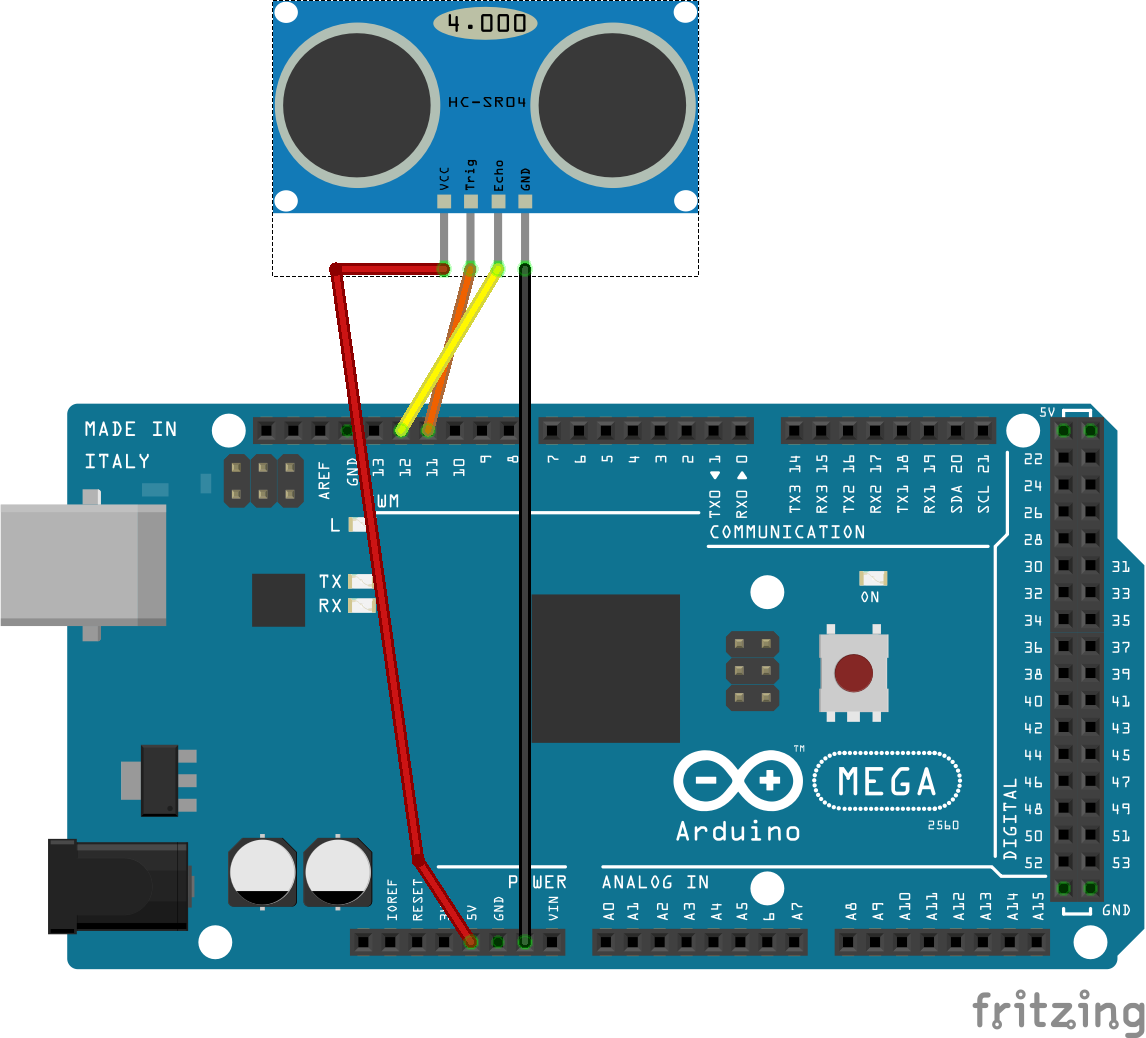
Следуйте принципиальной схеме и выполните соединения, как показано на изображении ниже.
Откройте на компьютере программу Arduino IDE. Добавление кодирования на языке Arduino позволит вам управлять вашей схемой. Откройте новый файл эскиза, нажав кнопку «Создать».
Ультразвуковой датчик имеет четыре клеммы – + 5V, триггер, эхо и заземление, подключенные следующим образом –
- Подключите вывод + 5V к + 5V на плате Arduino.
- Подключите триггер к цифровому контакту 7 на плате Arduino.
- Подключите Echo к цифровому выводу 6 на плате Arduino.
- Соедините GND с GND на Arduino.
В программе будет отображаться расстояние, измеренное датчиком в дюймах и сантиметрах через последовательный порт.
Для получения подробной информации о коде Arduino посетите официальный сайт Tutorialspoint.
Simple Arduino и HC-SR04 (заменяемый ультразвуковым датчиком Grove)
по схеме Instructables
Для начала нужна удобная для новичков настройка? Этот проект требует минимального количества компонентов и определенно поможет вам начать работу с ультразвуковыми датчиками!
Что вам понадобится:
- Arduino UNO R3
- HC-SR04 Ультразвуковой датчик
- Зеленый и красный светодиоды
- 2 резистора по 560 Ом (зеленый, синий, коричневый, золотой)
- Половина макета
- 8 соединительных проводов вилка / вилка
- A линейка для измерения сантиметров (или серийный монитор)
Когда вы все собрали, пора соединить все компоненты!
Затем загрузите эскиз, скопируйте его на свой Arduino и наблюдайте за мигающими огнями!
Для получения более подробной информации о коде Arduino посетите официальный сайт обучающей схемы
.-550x550.jpg)
Внутреннее молниеносное облако
от Seeed Community
Хотите украсить свое жилое пространство прохладным освещением? Попробуйте этот проект, чтобы создать ощущение шторма в интерьере!
Что вам понадобится:
- Плата Seeeduino
- Grove – Base Shield
- Настенный адаптер питания – 9 В C 1A
- Гибкая светодиодная полоса Digital RGB 30 светодиодов – 1 метр
- Grove – Ultrasonic Ranger
- Grove – универсальные 4-контактные кабели с перемычкой на 20 см и 50 см
Интересно звучит? Щелкните здесь для получения дополнительной информации и инструкций!
Сводка
Это все об ультразвуковых датчиках! Мы ответили на ваш вопрос? Мы обсудили, что такое ультразвуковые датчики и как они работают.Мы также рассказали о HC-SR04 и нашем ультразвуковом датчике расстояния Grove, а также о некоторых проектах и учебных пособиях по нему.
Так чего же вы ждете? Попробуйте наш Grove – ультразвуковой датчик расстояния сегодня!
Следите за нами и ставьте лайки:
Продолжить чтение
urm37_v5.
 0_ultrasonic_sensor_sku_sen0001_-DFRobot
0_ultrasonic_sensor_sku_sen0001_-DFRobot- ДОМ
- СООБЩЕСТВО
- ФОРУМ
- БЛОГ
- ОБРАЗОВАНИЕ
- Контроллер
- DFR0010 Arduino Nano 328
- DFR0136 Сервоконтроллер Flyduino-A 12
- DFR0225 Romeo V2-Все в одном контроллере R3
- Arduino_Common_Controller_Selection_Guide
- DFR0182 Беспроводной геймпад V2.0
- DFR0100 Комплект для начинающих DFRduino для Arduino V3
- DFR0267 Блуно
- DFR0282 Жук
- DFR0283 Мечтательный клен V1.
 0
0 - DFR0296 Блуно Нано
- DFR0302 MiniQ 2WD Plus
- DFR0304 Беспроводной геймпад BLE V2
- DFR0305 RoMeo BLE
- DFR0351 Romeo BLE mini V2.0
- DFR0306 Блуно Мега 1280
- DFR0321 Узел Wido-WIFI IoT
- DFR0323 Блуно Мега 2560
- DFR0329 Блуно М3
- DFR0339 Жук Блуно
- DFR0343 Контроллер с низким энергопотреблением UHex
- DFR0355 SIM808 с материнской платой Leonardo
- DFR0392 DFRduino M0 материнская плата, совместимая с Arduino
- DFR0398 Romeo BLE Quad Robot Controller
- DFR0416 Bluno M0 Материнская плата
- DFR0575 Жук ESP32
- DFR0133 X-Доска
- DFR0162 X-Board V2
- DFR0428 3.
 5-дюймовый сенсорный TFT-экран для Raspberry Pi
5-дюймовый сенсорный TFT-экран для Raspberry Pi - DFR0494 Raspberry Pi ШАПКА ИБП
- DFR0514 DFR0603 IIC 16X2 RGB LCD KeyPad HAT V1.0
- DFR0524 5.5 HDMI OLED-дисплей с емкостным сенсорным экраном V2.0
- DFR0550 5-дюймовый TFT-дисплей с сенсорным экраном V1.0
- DFR0591 модуль дисплея raspberry pi e-ink V1.0
- DFR0592 Драйвер двигателя постоянного тока HAT
- DFR0604 HAT расширения ввода-вывода для Pi zero V1.0
- DFR0566 Шляпа расширения ввода-вывода для Raspberry Pi
- DFR0528 Шляпа ИБП для Raspberry Pi Zero
- DFR0331 Romeo для контроллера Edison
- DFR0453 DFRobot CurieNano – мини-плата Genuino Arduino 101
- TEL0110 CurieCore Intel® Curie Neuron Module
- DFR0478 Микроконтроллер FireBeetle ESP32 IOT (V3.
 0) с поддержкой Wi-Fi и Bluetooth
0) с поддержкой Wi-Fi и Bluetooth - DFR0483 FireBeetle Covers-Gravity I O Expansion Shield
- FireBeetle Covers-24 × 8 светодиодная матрица
- TEL0121 FireBeetle Covers-LoRa Radio 433 МГц
- TEL0122 FireBeetle Covers-LoRa Radio 915 МГц
- TEL0125 FireBeetle охватывает LoRa Radio 868MHz
- DFR0489 FireBeetle ESP8266 Микроконтроллер IOT
- DFR0492 FireBeetle Board-328P с BLE4.1
- DFR0498 FireBeetle Covers-Camera & Audio Media Board
- DFR0507 FireBeetle Covers-OLED12864 Дисплей
- DFR0508 FireBeetle Covers-Двигатель постоянного тока и шаговый драйвер
- DFR0511 FireBeetle Covers-ePaper Черно-белый дисплейный модуль
- DFR0531 FireBeetle Covers-ePaper Черно-белый и красный дисплейный модуль
- DFR0536 Плата расширения геймпада с микробитами
- DFR0548 Плата расширения микробитового драйвера
- ROB0148 micro: Maqueen для micro: bit
- ROB0150 Microbit Круглая плата расширения для светодиодов RGB
- MBT0005 Micro IO-BOX
- SEN0159 Датчик CO2
- DFR0049 DFRobot Датчик газа
- TOY0058 Датчик атмосферного давления
- SEN0220 Инфракрасный датчик CO2 0-50000ppm
- SEN0219 Гравитационный аналоговый инфракрасный датчик CO2 для Arduino
- SEN0226 Датчик барометра Gravity I2C BMP280
- SEN0231 Датчик гравитации HCHO
- SEN0251 Gravity BMP280 Датчики атмосферного давления
- SEN0132 Датчик угарного газа MQ7
- SEN0032 Трехосный акселерометр – ADXL345
- DFR0143 Трехосевой акселерометр MMA7361
- Трехосный акселерометр серии FXLN83XX
- SEN0072 CMPS09 – Магнитный компас с компенсацией наклона
- SEN0073 9 степеней свободы – бритва IMU
- DFR0188 Flymaple V1.
 1
1 - SEN0224 Трехосевой акселерометр Gravity I2C – LIS2DH
- SEN0140 Датчик IMU с 10 степенями свободы, версия 2.0
- SEN0250 Gravity BMI160 6-осевой инерционный датчик движения
- SEN0253 Gravity BNO055 + BMP280 интеллектуальный 10DOF AHRS
- SEN0001 URM37 V5.0 Ультразвуковой датчик
- SEN0002 URM04 V2.0
- SEN0004 SRF01 Ультразвуковой датчик
- SEN0005 SRF02 Ультразвуковой датчик
- SEN0006 SRF05 Ультразвуковой датчик
- SEN0007 SRF08 Ультразвуковой датчик
- SEN0008 SRF10 Ультразвуковой датчик
- SEN0149 URM06-RS485 Ультразвуковой
- SEN0150 URM06-UART Ультразвуковой
- SEN0151 URM06-PULSE Ультразвуковой
- SEN0152 URM06-ANALOG Ультразвуковой
- SEN0153 Ультразвуковой датчик URM07-UART
- SEN0246 URM08-RS485 Водонепроницаемый гидролокатор-дальномер
- SEN0304 Ультразвуковой датчик URM09 (Gravity-I2C) (V1.
 0)
0) - SEN0304 Ультразвуковой датчик URM09 (Gravity-I2C) (V1.0)
- SEN0300 Водонепроницаемый ультразвуковой датчик ULS
- SEN0301 Водонепроницаемый ультразвуковой датчик ULA
- SEN0307 URM09 Аналог ультразвукового датчика силы тяжести
- SEN0311 A02YYUW Водонепроницаемый ультразвуковой датчик
- SEN0312 ME007YS Водонепроницаемый ультразвуковой датчик
- SEN0313 A01NYUB Водонепроницаемый ультразвуковой датчик
- DFR0066 SHT1x Датчик влажности и температуры
- DFR0067 DHT11 Датчик температуры и влажности
- SEN0137 DHT22 Модуль температуры и влажности
- DFR0023 Линейный датчик температуры DFRobot LM35
- DFR0024 Gravity DS18B20 Датчик температуры, совместимый с Arduino V2
- DFR0024 Gravity DS18B20 Датчик температуры, совместимый с Arduino V2
- SEN0114 Датчик влажности
- Датчик температуры TOY0045 TMP100
- TOY0054 SI7021 Датчик температуры и влажности
- SEN0206 Датчик инфракрасного термометра MLX
- SEN0227 SHT20 Водонепроницаемый датчик температуры и влажности I2C
- SEN0236 Gravity I2C BME280 Датчик окружающей среды Температура, влажность, барометр
- SEN0248 Gravity I2C BME680 Датчик окружающей среды VOC, температура, влажность, барометр
- DFR0558 Цифровой высокотемпературный датчик силы тяжести типа К
- SEN0308 Водонепроницаемый емкостный датчик влажности почвы
- SEN0019 Регулируемый переключатель инфракрасного датчика
- SEN0042 DFRobot Инфракрасный датчик прорыва
- SEN0143 SHARP GP2Y0A41SK0F ИК-датчик рейнджера 4-30 см
- SEN0013 Sharp GP2Y0A02YK ИК-датчик рейнджера 150 см
- SEN0014 Sharp GP2Y0A21 Датчик расстояния 10-80 см
- SEN0085 Sharp GP2Y0A710K Датчик расстояния 100-550 см
- Модуль цифрового ИК-приемника DFR0094
- DFR0095 Модуль цифрового ИК-передатчика
- SEN0018 Цифровой инфракрасный датчик движения
- DFR0107 ИК-комплект
- SEN0264 TS01 ИК-датчик температуры (4-20 мА)
- SEN0169 Аналоговый pH-метр Pro
- DFR0300-H Gravity: аналоговый датчик электропроводности (K = 10)
- DFR0300 Гравитационный аналоговый датчик электропроводности V2 K = 1
- SEN0165 Аналоговый измеритель ОВП
- SEN0161-V2 Комплект гравитационного аналогового датчика pH V2
- SEN0161 PH метр
- SEN0237 Гравитационный аналоговый датчик растворенного кислорода
- SEN0204 Бесконтактный датчик уровня жидкости XKC-Y25-T12V
- SEN0205 Датчик уровня жидкости-FS-IR02
- SEN0244 Gravity Analog TDS Sensor Meter для Arduino
- SEN0249 Комплект измерителя pH с аналоговым наконечником копья силы тяжести для применения в почве и пищевых продуктах
- SEN0121 Датчик пара
- SEN0097 Датчик освещенности
- DFR0026 Датчик внешней освещенности DFRobot
- TOY0044 УФ-датчик
- SEN0172 LX1972 датчик внешней освещенности
- SEN0043 Датчик внешней освещенности TEMT6000
- SEN0175 УФ-датчик v1.
 0-ML8511
0-ML8511 - SEN0228 Gravity I2C VEML7700 Датчик внешней освещенности
- SEN0101 Датчик цвета TCS3200
- DFR0022 Датчик оттенков серого DFRobot
- Датчик отслеживания линии SEN0017 для Arduino V4
- SEN0147 Интеллектуальный датчик оттенков серого
- SEN0212 TCS34725 Датчик цвета I2C для Arduino
- SEN0245 Gravity VL53L0X Лазерный дальномер ToF
- SEN0259 TF Mini LiDAR ToF Laser Range Sensor
- SEN0214 Датчик тока 20А
- SEN0262 Гравитационный аналоговый преобразователь тока в напряжение для приложений 4 ~ 20 мА
- SEN0291 Gravity: Цифровой ваттметр I2C
- DFR0027 Цифровой датчик вибрации DFRobot V2
- DFR0028 DFRobot Датчик наклона
- DFR0029 Цифровая кнопка DFRobot
- DFR0030 DFRobot емкостный сенсорный датчик
- Модуль цифрового зуммера DFR0032
- DFR0033 Цифровой магнитный датчик
- DFR0034 Аналоговый звуковой датчик
- SEN0038 Колесные энкодеры для DFRobot 3PA и 4WD Rovers
- DFR0051 Аналоговый делитель напряжения
- DFR0052 Аналоговый пьезодисковый датчик вибрации
- DFR0076 Датчик пламени
- DFR0053 Аналоговый датчик положения ползуна
- DFR0054 Аналоговый датчик вращения V1
- DFR0058 Аналоговый датчик вращения V2
- Модуль джойстика DFR0061 для Arduino
- DFR0075 AD Клавиатурный модуль
- Модуль вентилятора DFR0332
- SEN0177 PM2.
 5 лазерный датчик пыли
5 лазерный датчик пыли - Модуль датчика веса SEN0160
- SEN0170 Тип напряжения датчика скорости ветра 0-5 В
- TOY0048 Высокоточный двухосевой датчик инклинометра, совместимый с Arduino Gadgeteer
- SEN0187 RGB и датчик жестов
- SEN0186 Метеостанция с анемометром Флюгер Дождь ведро
- SEN0192 Датчик микроволн
- SEN0185 датчик Холла
- FIT0449 DFRobot Speaker v1.0
- Датчик частоты сердечных сокращений SEN0203
- DFR0423 Самоблокирующийся переключатель
- SEN0213 Датчик монитора сердечного ритма
- SEN0221 Датчик угла Холла силы тяжести
- Датчик переключателя проводимости SEN0223
- SEN0230 Инкрементальный фотоэлектрический датчик угла поворота – 400P R
- SEN0235 Модуль поворотного энкодера EC11
- SEN0240 Аналоговый датчик ЭМГ от OYMotion
- SEN0232 Гравитационный аналоговый измеритель уровня звука
- SEN0233 Монитор качества воздуха PM 2.
 5, формальдегид, датчик температуры и влажности
5, формальдегид, датчик температуры и влажности - DFR0515 FireBeetle Covers-OSD Модуль наложения символов
- SEN0257 Датчик гравитационного давления воды
- SEN0289 Gravity: Цифровой датчик встряхивания
- SEN0290 Gravity: Датчик молнии
- DFR0271 GMR Плата
- ROB0003 Pirate 4WD Мобильная платформа
- Мобильная платформа ROB0005 Turtle 2WD
- ROB0025 NEW A4WD Мобильный робот с кодировщиком
- ROB0050 4WD MiniQ Полный комплект
- ROB0111 4WD MiniQ Cherokey
- ROB0036 Комплект роботизированной руки с 6 степенями свободы
- Комплект наклонно-поворотного устройства FIT0045 DF05BB
- ROB0102 Мобильная платформа Cherokey 4WD
- ROB0117 Базовый комплект для Cherokey 4WD
- ROB0022 4WD Мобильная платформа
- ROB0118 Базовый комплект для Turtle 2WD
- Робот-комплект ROB0080 Hexapod
- ROB0112 Мобильная платформа Devastator Tank
- ROB0114 Мобильная платформа Devastator Tank
- ROB0124 Мобильная платформа HCR с всенаправленными колесами
- ROB0128 Devastator Tank Мобильная платформа Металлический мотор-редуктор постоянного тока
- ROB0137 Explorer MAX Робот
- ROB0139 Робот FlameWheel
- DFR0270 Accessory Shield для Arduino
- DFR0019 Щит для прототипирования для Arduino
- DFR0265 IO Expansion Shield для Arduino V7
- DFR0210 Пчелиный щит
- DFR0165 Mega IO Expansion Shield V2.
 3
3 - DFR0312 Плата расширения Raspberry Pi GPIO
- DFR0311 Raspberry Pi встречает Arduino Shield
- DFR0327 Arduino Shield для Raspberry Pi 2B и 3B
- DFR0371 Экран расширения ввода-вывода для Bluno M3
- DFR0356 Щит Bluno Beetle
- DFR0412 Gravity IO Expansion Shield для DFRduino M0
- DFR0375 Cookie I O Expansion Shield V2
- DFR0334 GPIO Shield для Arduino V1.0
- DFR0502 Gravity IO Expansion & Motor Driver Shield V1.1
- DFR0518 Micro Mate – мини-плата расширения для микробита
- DFR0578 Gravity I O Expansion Shield для OpenMV Cam M7
- DFR0577 Gravity I O Expansion Shield для Pyboard
- DFR0626 MCP23017 Модуль расширения с IIC на 16 цифровых IO
- DFR0287 LCD12864 Экран
- DFR0009 Экран ЖК-клавиатуры для Arduino
- DFR0063 I2C TWI LCD1602 Модуль Gadgeteer-совместимый
- Модуль DFR0154 I2C TWI LCD2004, совместимый с Arduino Gadgeteer
- Светодиодная матрица DFR0202 RGB
- DFR0090 3-проводной светодиодный модуль
- TOY0005 OLED 2828 модуль цветного дисплея.
 Совместимость с NET Gadgeteer
Совместимость с NET Gadgeteer - Модуль дисплея TOY0006 OLED 9664 RGB
- Модуль дисплея TOY0007 OLED 2864
- Модуль дисплея FIT0328 2.7 OLED 12864
- DFR0091 3-проводной последовательный ЖК-модуль, совместимый с Arduino
- DFR0347 2.8 TFT Touch Shield с 4 МБ флэш-памяти для Arduino и mbed
- DFR0348 3.5 TFT Touch Shield с 4 МБ флэш-памяти для Arduino и mbed
- DFR0374 Экран LCD клавиатуры V2.0
- DFR0382 Экран со светодиодной клавиатурой V1.0
- DFR0387 TELEMATICS 3.5 TFT сенсорный ЖК-экран
- DFR0459 Светодиодная матрица RGB 8×8
- DFR0460 Светодиодная матрица RGB 64×32 – шаг 4 мм / Гибкая светодиодная матрица 64×32 – Шаг 4 мм / Гибкая светодиодная матрица 64×32 – Шаг 5 мм
- DFR0461 Гибкая светодиодная матрица 8×8 RGB Gravity
- DFR0462 Гибкая светодиодная матрица 8×32 RGB Gravity
- DFR0463 Gravity Гибкая светодиодная матрица 16×16 RGB
- DFR0471 Светодиодная матрица RGB 32×16 – шаг 6 мм
- DFR0472 Светодиодная матрица RGB 32×32 – шаг 4 мм
- DFR0464 Gravity I2C 16×2 ЖК-дисплей Arduino с подсветкой RGB
- DFR0499 Светодиодная матрица RGB 64×64 – шаг 3 мм
- DFR0506 7-дюймовый дисплей HDMI с емкостным сенсорным экраном
- DFR0555 \ DF0556 \ DFR0557 Gravity I2C LCD1602 Модуль ЖК-дисплея Arduino
- DFR0529 2.
 2-дюймовый ЖК-дисплей TFT V1.0 (интерфейс SPI)
2-дюймовый ЖК-дисплей TFT V1.0 (интерфейс SPI) - DFR0605 Gravity: цифровой светодиодный модуль RGB
- FIT0352 Цифровая светодиодная водонепроницаемая лента с RGB-подсветкой 60LED м * 3 м
- DFR0645-G DFR0645-R 4-цифровой светодиодный сегментный модуль дисплея
- Артикул DFR0646-G DFR0646-R 8-цифровой светодиодный сегментный модуль дисплея
- DFR0597 Гибкая светодиодная матрица RGB 7×71
- DFR0231 Модуль NFC для Arduino
- Модуль радиоданных TEL0005 APC220
- TEL0023 BLUETOOH BEE
- TEL0026 DF-BluetoothV3 Bluetooth-модуль
- Модуль беспроводного программирования TEL0037 для Arduino
- TEL0044 DFRduino GPS Shield-LEA-5H
- TEL0047 WiFi Shield V2.1 для Arduino
- TEL0051 GPS GPRS GSM модуль V2.
 0
0 - TEL0067 Wi-Fi Bee V1.0
- TEL0073 BLE-Link
- TEL0075 RF Shield 315 МГц
- TEL0078 WIFI Shield V3 PCB Антенна
- TEL0079 WIFI Shield V3 RPSMA
- TEL0084 BLEmicro
- TEL0086 DF-маяк EVB
- TEL0087 USBBLE-LINK Bluno Адаптер для беспроводного программирования
- TEL0080 UHF RFID МОДУЛЬ-USB
- TEL0081 УВЧ RFID МОДУЛЬ-RS485
- TEL0082 UHF RFID МОДУЛЬ-UART
- TEL0083-A GPS-приемник для Arduino Model A
- TEL0092 WiFi Bee-ESP8266 Wirelss модуль
- Модуль GPS TEL0094 с корпусом
- TEL0097 SIM808 GPS GPRS GSM Shield
- DFR0342 W5500 Ethernet с материнской платой POE
- DFR0015 Xbee Shield для Arduino без Xbee
- TEL0107 WiFiBee-MT7681 Беспроводное программирование Arduino WiFi
- TEL0089 SIM800C GSM GPRS Shield V2.
 0
0 - Модуль приемника RF TEL0112 Gravity 315MHZ
- TEL0113 Gravity UART A6 GSM и GPRS модуль
- TEL0118 Gravity UART OBLOQ IoT-модуль
- Модуль TEL0120 DFRobot BLE4.1
- Bluetooth-адаптер TEL0002
- Модуль аудиоприемника Bluetooth TEL0108
- TEL0124 SIM7600CE-T 4G (LTE) Shield V1.0
- DFR0505 SIM7000C Arduino NB-IoT LTE GPRS Expansion Shield
- DFR0013 IIC для GPIO Shield V2.0
- Плата привода двигателя датчика DFR0057 – Версия 2.2
- DFR0062 Адаптер WiiChuck
- DFR0233 Узел датчика RS485 V1.0
- DFR0259 Arduino RS485 щит
- DFR0370 Экран CAN-BUS V2
- DFR0627 IIC для двойного модуля UART
- TEL0070 Multi USB RS232 RS485 TTL преобразователь
- DFR0064 386AMP модуль аудиоусилителя
- DFR0273 Экран синтеза речи
- DFR0299 DFPlayer Mini
- TOY0008 DFRduino Плеер MP3
- SEN0197 Диктофон-ISD1820
- DFR0420 Аудиозащитный экран для DFRduino M0
- DFR0534 Голосовой модуль
- SD2403 Модуль часов реального времени SKU TOY0020
- TOY0021 SD2405 Модуль часов реального времени
- DFR0151 Модуль Gravity I2C DS1307 RTC
- DFR0469 Модуль Gravity I2C SD2405 RTC
- DFR0316 MCP3424 18-битный канал АЦП-4 с усилителем с программируемым усилением
- DFR0552 Gravity 12-битный модуль I2C DAC
- DFR0553 Gravity I2C ADS1115 16-битный модуль АЦП, совместимый с Arduino и Raspberry Pi
- DFR0117 Модуль хранения данных Gravity I2C EEPROM
- Модуль SD DFR0071
- Плата привода двигателя датчика DFR0057 – Версия 2.
 2
2 - DFR0360 XSP – Программист Arduino
- DFR0411 Двигатель постоянного тока Gravity 130
- DFR0438 Яркий светодиодный модуль
- DFR0439 Светодиодные гирлянды красочные
- DFR0440 Модуль микровибрации
- DFR0448 Светодиодные гирлянды, теплый белый цвет
- Встроенный термопринтер DFR0503 – последовательный TTL
- DFR0504 Гравитационный изолятор аналогового сигнала
- DFR0520 Двойной цифровой потенциометр 100K
- DFR0565 Гравитационный цифровой изолятор сигналов
- DFR0563 Гравитация 3.Датчик уровня топлива литиевой батареи 7V
- DFR0576 Гравитационный цифровой мультиплексор I2C с 1 по 8
- DFR0117 Модуль хранения данных Gravity I2C EEPROM
- DRI0001 Моторный щит Arduino L293
- DRI0002 MD1.
 3 2A Двухмоторный контроллер
3 2A Двухмоторный контроллер - DRI0009 Моторный щит Arduino L298N
- DRI0021 Драйвер двигателя постоянного тока Veyron 2x25A Brush
- DRI0017 2A Моторный щит для Arduino Twin
- Драйвер двигателя постоянного тока DRI0018 2x15A Lite
- Микродвигатель постоянного тока FIT0450 с энкодером-SJ01
- FIT0458 Микродвигатель постоянного тока с энкодером-SJ02
- DFR0399 Микро-металлический мотор-редуктор постоянного тока 75 1 Вт Драйвер
- DRI0039 Quad Motor Driver Shield для Arduino
- DRI0040 Двойной 1.Драйвер двигателя 5A – HR8833
- DRI0044 2×1.2A Драйвер двигателя постоянного тока TB6612FNG
- Драйвер двигателя постоянного тока DFR0513 PPM 2x3A
- DFR0523 Гравитационный цифровой перистальтический насос
- DRI0027 Digital Servo Shield для Arduino
- DRI0029 Сервопривод Veyron, 24 канала
- SER0044 DSS-M15S 270 ° 15KG Металлический сервопривод DF с аналоговой обратной связью
- DRI0023 Экран шагового двигателя для Arduino DRV8825
- DRI0035 TMC260 Щиток драйвера шагового двигателя
- DFR0105 Силовой щит
- DFR0205 Силовой модуль
- DFR0457 Контроллер мощности Gravity MOSFET
- DFR0564 Зарядное устройство USB для 7.
 Литий-полимерная батарея 4 В
Литий-полимерная батарея 4 В - DFR0535 Менеджер солнечной энергии
- DFR0559 Солнечная система управления мощностью 5 В для подсолнечника
- DFR0559 Менеджер солнечной энергии 5 В
- DFR0580 Solar Power Manager для свинцово-кислотных аккумуляторов 12 В
- DFR0222 Реле X-Board
- Релейный модуль DFR0017, совместимый с Arduino
- DFR0289 Релейный контроллер RLY-8-POE
- DFR0290 RLY-8-RS485 8-релейный контроллер
- DFR0144 Релейный экран для Arduino V2.1
- DFR0473 Gravity Digital Relay Module Совместимость с Arduino и Raspberry Pi
- KIT0003 EcoDuino – Комплект для автомобильных заводов
- KIT0071 MiniQ Discovery Kit
- KIT0098 Пакет компонентов подключаемого модуля Breadboard
- Артикул DFR0748 Цветок Китти
- SEN0305 Гравитация: HUSKYLENS – простой в использовании датчик машинного зрения с искусственным интеллектом
- Подключение датчика к Raspberry Pi
- DFR0677 ШЛЯПА ONPOWER UPS для Raspberry Pi
HC-SR04 Ультразвуковой датчик Работа, расположение выводов, характеристики и техническое описание
Распиновка ультразвукового датчика КонфигурацияНомер контакта | Имя контакта | Описание |
1 | Vcc | Вывод Vcc питает датчик, обычно + 5В |
2 | Триггер | Триггерный контакт – это входной контакт. |
3 | Эхо | Вывод Echo – это вывод вывода. Этот вывод становится высоким в течение периода времени, который будет равен времени, необходимому для возврата американской волны обратно к датчику. |
4 | Земля | Этот вывод подключен к заземлению системы. |
 Этот вывод должен находиться на высоком уровне в течение 10 мкс для инициализации измерения путем отправки волны США.
Этот вывод должен находиться на высоком уровне в течение 10 мкс для инициализации измерения путем отправки волны США.- Рабочее напряжение: + 5В
- Теоретическое расстояние измерения: от 2 см до 450 см
- Практическое расстояние измерения: от 2 см до 80 см
- Точность: 3 мм
- Угол измерения: <15 °
- Рабочий ток: <15 мА
- Рабочая частота: 40 Гц
Более подробную информацию можно найти в техническом описании ультразвукового датчика HC-SR04 , прикрепленном в конце этой статьи.
Передатчик США Пара приемников, модуль ИК-датчика, пара ИК-датчиков, ИК-аналоговый датчик расстояния,
HC-SR04 Ультразвуковой датчик – рабочийКак показано выше, ультразвуковой датчик HC-SR04 (США) представляет собой 4-контактный модуль с именами контактов Vcc, Trigger, Echo и Ground соответственно. Этот датчик является очень популярным датчиком, который используется во многих приложениях, где требуется измерение расстояния или обнаружение объектов.Модуль имеет два проема спереди, которые образуют ультразвуковой передатчик и приемник. Датчик работает по простой формуле для средней школы:
Расстояние = Скорость × Время
Ультразвуковой передатчик передает ультразвуковую волну, эта волна распространяется по воздуху, и когда она сталкивается с каким-либо материалом, она отражается обратно к датчику, эта отраженная волна наблюдается модулем ультразвукового приемника, как показано на рисунке ниже
Теперь, чтобы рассчитать расстояние по приведенным выше формулам, мы должны знать скорость и время.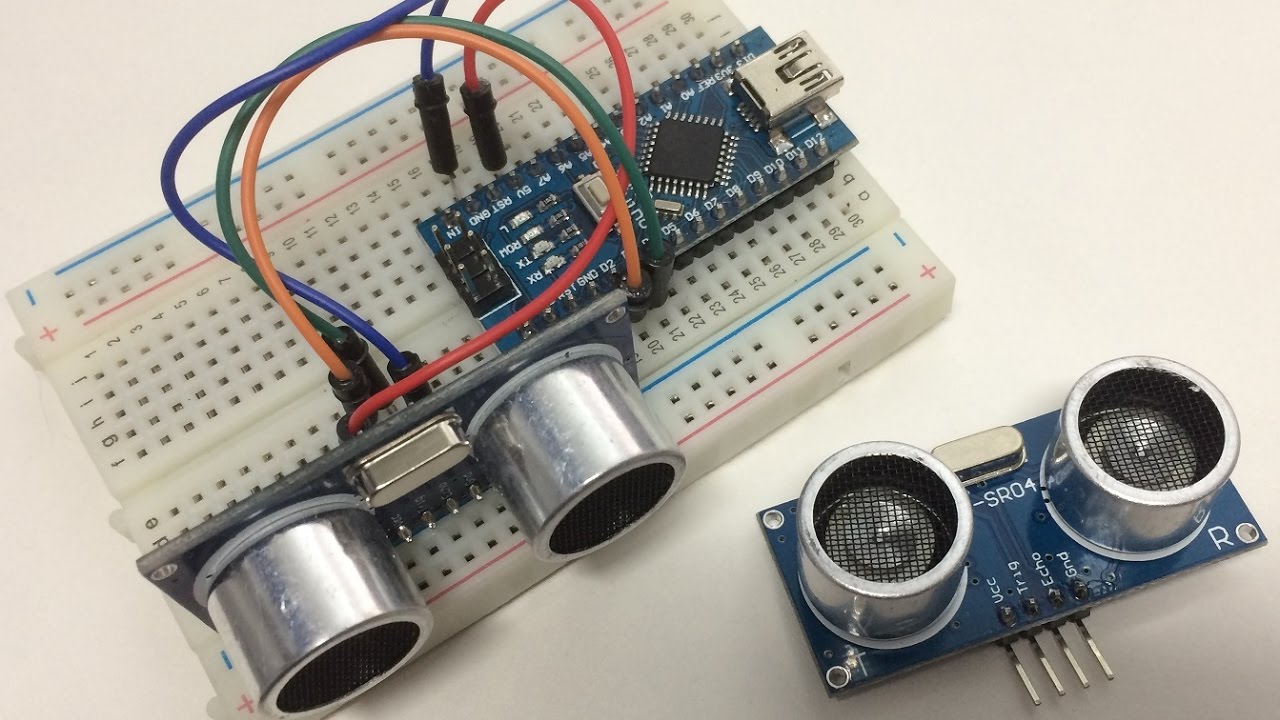 Поскольку мы используем ультразвуковую волну, мы знаем универсальную скорость ультразвуковой волны в комнатных условиях, которая составляет 330 м / с. Схема, встроенная в модуль, рассчитает время, необходимое для возвращения волны США, и включает высокий уровень эхо-сигнала на такое же количество времени, таким образом мы также можем узнать затраченное время. Теперь просто рассчитайте расстояние с помощью микроконтроллера или микропроцессора.
Поскольку мы используем ультразвуковую волну, мы знаем универсальную скорость ультразвуковой волны в комнатных условиях, которая составляет 330 м / с. Схема, встроенная в модуль, рассчитает время, необходимое для возвращения волны США, и включает высокий уровень эхо-сигнала на такое же количество времени, таким образом мы также можем узнать затраченное время. Теперь просто рассчитайте расстояние с помощью микроконтроллера или микропроцессора.
Датчик расстояния HC-SR04 обычно используется как с микроконтроллерами, так и с микропроцессорными платформами, такими как Arduino, ARM, PIC, Raspberry Pie и т. Д.Следующее руководство является универсальным, поскольку его необходимо соблюдать независимо от типа используемого вычислительного устройства.
Подайте питание на датчик, используя регулируемое напряжение +5 В через контакты Vcc и заземления датчика. Ток, потребляемый датчиком, составляет менее 15 мА и, следовательно, может питаться напрямую от контактов 5 В на плате (при наличии).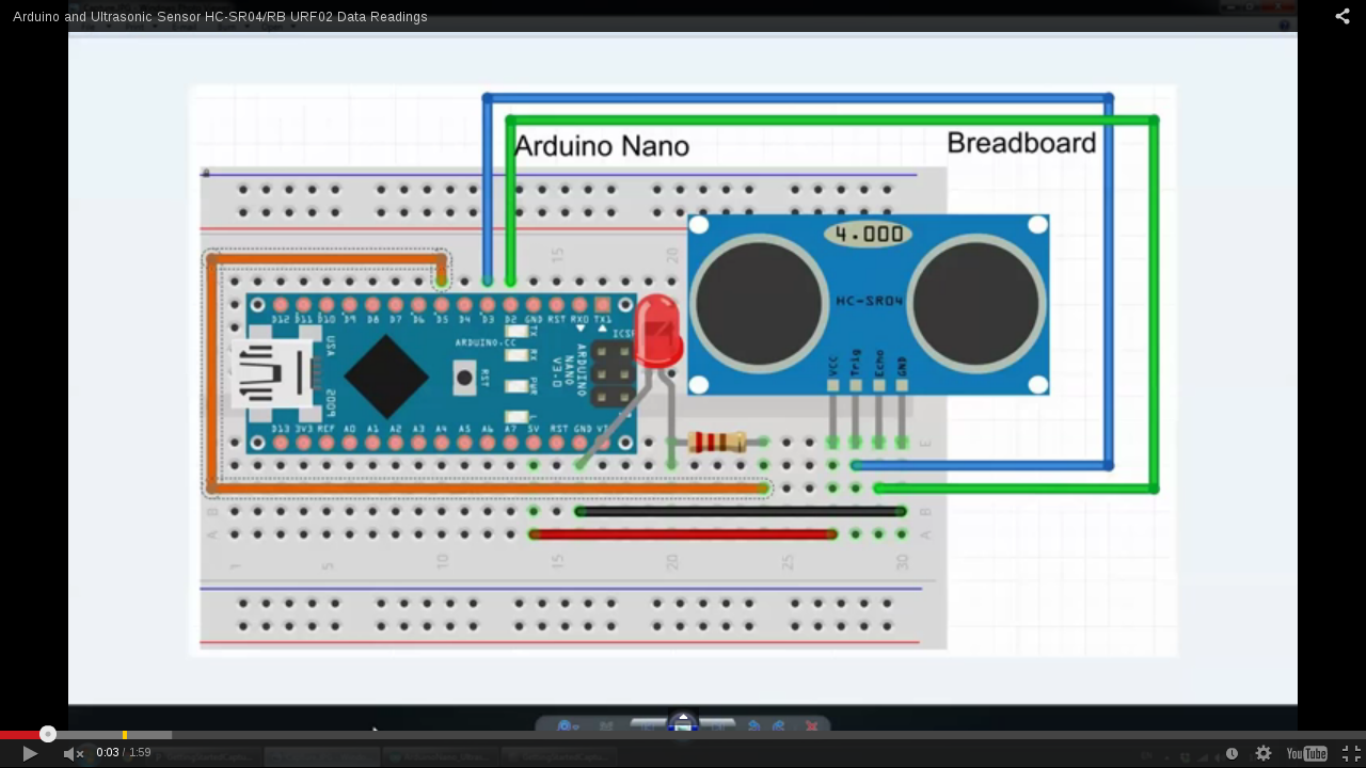 Контакты Trigger и Echo являются контактами ввода-вывода и, следовательно, могут быть подключены к контактам ввода-вывода микроконтроллера. Чтобы начать измерение, триггерный вывод должен быть установлен в высокий уровень на 10 мкс, а затем выключен.Это действие вызовет ультразвуковую волну с частотой 40 Гц от передатчика, а приемник будет ждать возвращения волны. Как только волна возвращается после того, как она отражается каким-либо объектом, вывод Echo переходит в высокий уровень в течение определенного количества времени, которое будет равно времени, необходимому для возврата волны обратно к датчику.
Контакты Trigger и Echo являются контактами ввода-вывода и, следовательно, могут быть подключены к контактам ввода-вывода микроконтроллера. Чтобы начать измерение, триггерный вывод должен быть установлен в высокий уровень на 10 мкс, а затем выключен.Это действие вызовет ультразвуковую волну с частотой 40 Гц от передатчика, а приемник будет ждать возвращения волны. Как только волна возвращается после того, как она отражается каким-либо объектом, вывод Echo переходит в высокий уровень в течение определенного количества времени, которое будет равно времени, необходимому для возврата волны обратно к датчику.
Время, в течение которого вывод Echo остается на высоком уровне, измеряется MCU / MPU, поскольку он дает информацию о времени, которое требуется для возврата волны обратно к датчику.Используя эту информацию, измеряется расстояние, как описано в заголовке выше.
Приложения- Используется для избегания и обнаружения препятствий с помощью таких роботов, как двуногий робот, робот, избегающий препятствий, робот для поиска пути и т.
 Д.
Д. - Используется для измерения расстояния в широком диапазоне от 2 см до 400 см
- Может использоваться для отображения объектов, окружающих датчик, путем его вращения
- Глубину некоторых мест, таких как колодцы, ямы и т. Д., Можно измерить, поскольку волны могут проникать сквозь воду
Arduino Uno и ультразвуковой датчик HY-SRF05, пример
HY-SRF05 – ультразвуковой излучатель / приемник, используемый для измерения расстояния с точностью ~ 0.3см. Он посылает прямоугольный волновой сигнал с частотой 40 кГц, который отражается от объектов перед датчиком. Затем этот сигнал считывается датчиком, и продолжительность принятого сигнала отражается на выводе ECHO.
Характеристики
Напряжение питания: от 4,5 В до 5,5 В
Ток питания: от 10 до 40 мА
Формат вывода триггера: цифровой импульс 10 мкс
Частота звука: 40 кГц
Выход вывода эхо: 0 В-VCC
Формат вывода эха: цифровой
Как использовать
Посылает импульс шириной 10Us (от низкого к высокому) на вывод триггера.
Наблюдать за выводом ECHO.
Когда вывод ECHO переходит в ВЫСОКИЙ уровень, запускает таймер.
Когда вывод ECHO переходит в НИЗКИЙ уровень, остановите таймер и сохраните прошедшее время.
Используйте затраченное время в следующей формуле, чтобы получить расстояние в см:
Расстояние (в см) = (прошедшее время * скорость звука (340 м / с)) / 100/2
Мы увидим пример кода позже
Список запчастей
Макет
Arduino и HY-SRF05
Код
/ *
VCC до + 5 В
GND на землю
TRIG на цифровой контакт 12
ECHO на цифровой вывод 13
* /
const int TRIG_PIN = 12;
const int ECHO_PIN = 13;
установка void ()
{
// инициализируем последовательную связь:
Серийный.begin (9600);
pinMode (TRIG_PIN, ВЫХОД);
pinMode (ECHO_PIN, ВХОД);
}
пустой цикл ()
{
большая продолжительность, distanceCm, distanceIn;
digitalWrite (TRIG_PIN, LOW);
delayMicroseconds (2);
digitalWrite (TRIG_PIN, HIGH);
delayMicroseconds (10);
digitalWrite (TRIG_PIN, LOW);
duration = pulseIn (ECHO_PIN, HIGH);
// конвертируем время в расстояние
distanceCm = продолжительность / 29,1 / 2;
distanceIn = продолжительность / 74/2;
если (расстояниеCm <= 0)
{
Serial.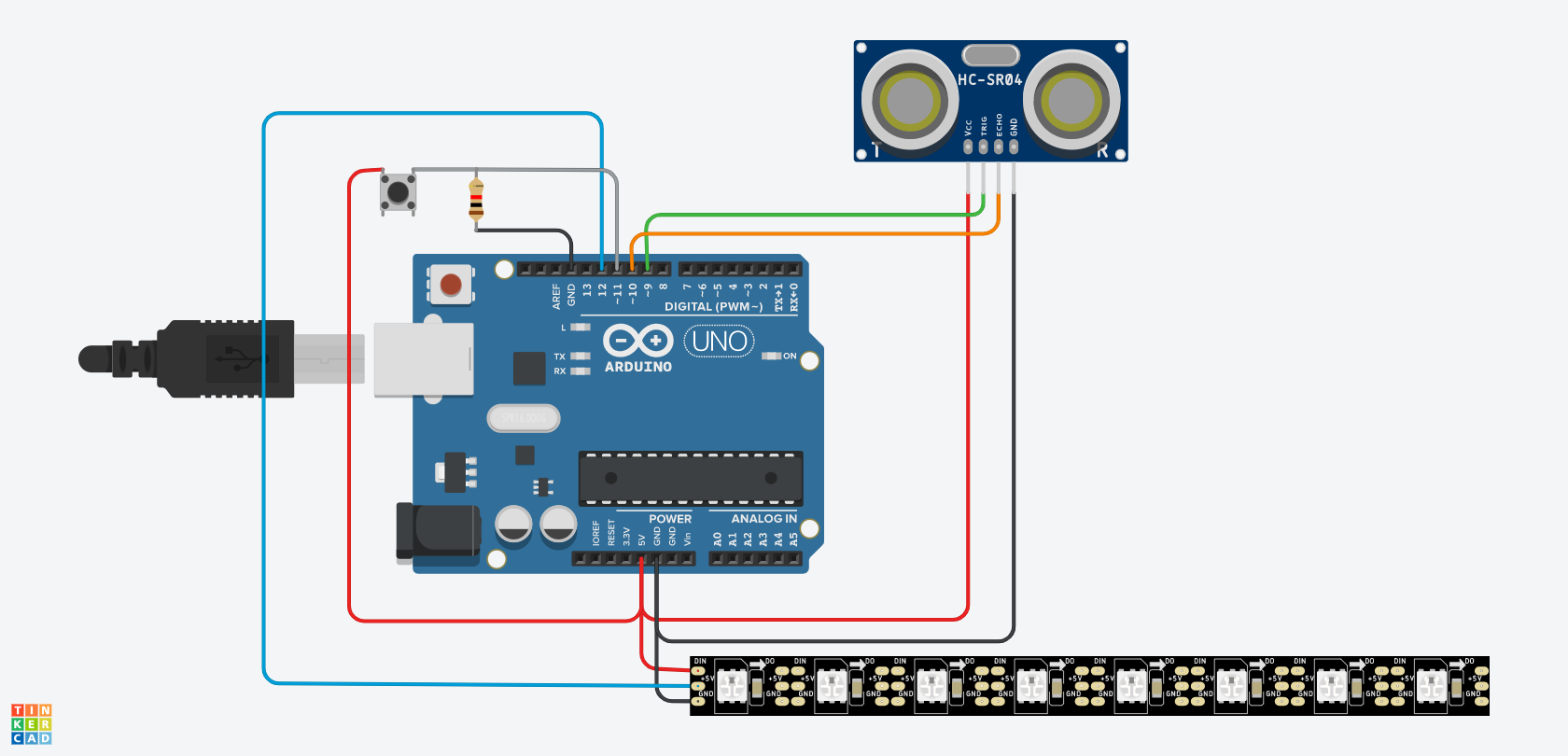 println («Вне диапазона»);
}
еще
{
Серийный.печать (distanceIn);
Serial.print ("в:");
Серийный. Отпечаток (расстояние см);
Serial.print («см»);
Serial.println ();
}
задержка (1000);
}
println («Вне диапазона»);
}
еще
{
Серийный.печать (distanceIn);
Serial.print ("в:");
Серийный. Отпечаток (расстояние см);
Serial.print («см»);
Serial.println ();
}
задержка (1000);
} Выход
Откройте последовательный монитор, и вы увидите что-то подобное в зависимости от того, насколько близко модуль к объекту
Я отодвигал датчик от объекта
4 дюйма, 10 см
3 дюйма, 9 см
4 дюйма, 10 см
4 дюйма, 10 см
4 дюйма, 10 см
4 дюйма, 10 см
4 дюйма, 12 см
4 дюйма, 12 см
4 дюйма, 12 см
«Терменвокс для бедных» – проект Arduino (ультразвуковой датчик)
// ТЕРЕМИН ДЛЯ БЕДНЫХ
// wwww.bleepbit.com
// (C) 2018
const int triggerPort = 5;
const int echoPort = 6;
int noteoff = 1;
длительность = 1000;
int distance = 1;
int distance2 = 1;
int tones [] = {66, 70, 74, 78, 83, 88, 93, 98, 104, 110, 117, 124, 131, 139, 147, 156, 165, 175, 185, 196, 208, 220, 233, 247, 262, 277, 294, 311, 330, 349, 370, 392, 415, 440, 466, 494, 523, 554, 587, 622, 659, 698, 740, 784, 831, 880, 932, 988, 1046, 1109, 1175, 1245, 1319, 1397, 1480, 1568, 1661, 1760, 1865, 1976};
int type = 1;
int button1 = НИЗКИЙ;
int button2 = НИЗКИЙ;
void setup () {
pinMode (triggerPort, OUTPUT);
pinMode (echoPort, INPUT);
}
void loop () {
button1 = digitalRead (12);
button2 = digitalRead (13);
digitalWrite (triggerPort, LOW);
digitalWrite (triggerPort, HIGH);
delayMicroseconds (10);
digitalWrite (triggerPort, LOW);
длинная длительность = pulseIn (echoPort, HIGH);
расстояние = 0.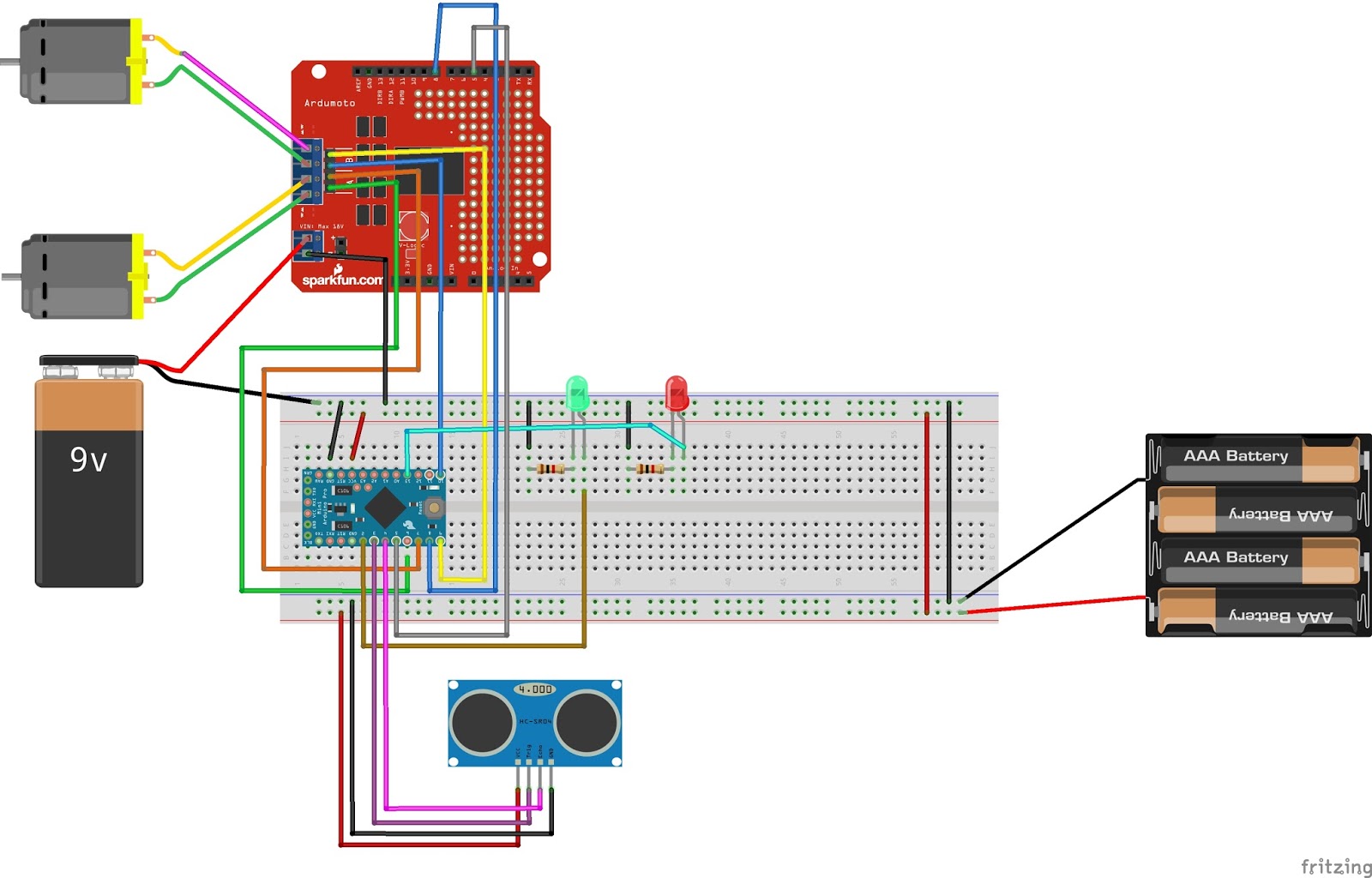 034 * продолжительность / 2;
034 * продолжительность / 2;
// ЭФФЕКТ ИЗМЕНЕНИЯ КНОПКИ 2
if (button2 == 1)
{
type = type + 1;
// ЕСЛИ ВЫ ДОБАВЛЯЕТЕ ЭФФЕКТ, УВЕЛИЧИТЕ ТИП В СЛЕДУЮЩЕЙ СТРОКЕ
if (type == 5)
{
type = 1;
}
noTone (8);
тон (8,1660);
задержка (150);
noTone (8);
задержка (100);
}
// КНОПКА 1: ПРИ НАЖАТИЕ ЗВУК ВКЛЮЧЕН
if (button1 == 1)
{
// Проверка расстояния
if (distance <41)
{
distance = расстояние;
}
else
{
расстояние = noteoff;
}
// ТИП 1
if (type == 1)
{
for (int k = tones [distance]; k <(tones [distance] + (tones [distance] / 5] )); k = k + 1)
{
тон (8, k);
задержка (2);
}
noteoff = расстояние;
}
// ТИП 2
if (type == 2)
{
distance2 = distance + 12;
для (int k = tones [distance2] +300; k> tones [distance2]; k = k-4)
{
тон (8, k);
задержка (2);
}
noteoff = расстояние;
}
// ТИП 3
if (type == 3)
{
distance2 = distance + 12;
тон (8, тонов [расстояние2]);
задержка (5);
тон (8, тонов [расстояние2] * 5);
задержка (5);
noteoff = расстояние;
}
// ТИП 4
if (type == 4)
{
distance2 = (расстояние);
тон (8, тонов [расстояние2]);
задержка (50);
тон (8, тонов [distance2 + 12]);
задержка (50);
noteoff = расстояние;
}
// ДОБАВИТЬ ДРУГИЕ ТИПЫ
delay (10);
}
else
{
noTone (8);
}
}
Arduino – Ультразвуковой датчик диапазона HC-SR04 – Робо Индия || Учебники || Изучите Arduino |
В этом руководстве Robo India объясняется принцип работы ультразвукового датчика дальности .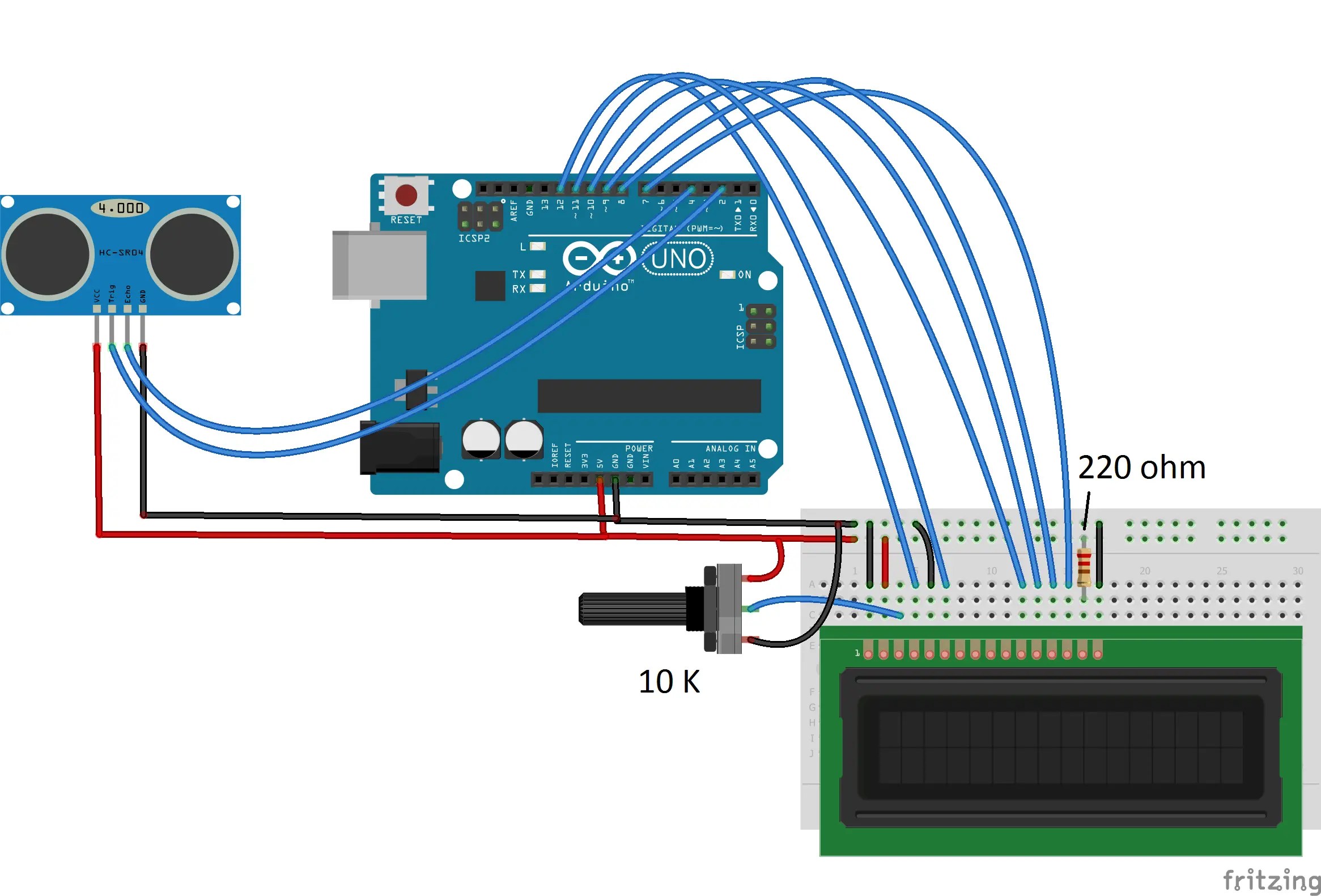 Это руководство основано на простой в использовании библиотеке. Различные встроенные функции библиотеки обеспечивают простоту использования ультразвукового датчика диапазона HC-SR04. 1. Введение:
Это руководство основано на простой в использовании библиотеке. Различные встроенные функции библиотеки обеспечивают простоту использования ультразвукового датчика диапазона HC-SR04. 1. Введение: Пошаговое иллюстрированное руководство по использованию Utrasonic Range Sensor HC-SR04 на Arduino. позволяет легко увидеть работу датчика. Этот датчик передает ультразвуковые волны и принимает их эхо. Мы используем разницу во времени между отправкой и получением эха. Этот временной интервал используется для измерения дальности или расстояния.Этот датчик очень полезен для создания автономных роботов.
1.1 Ультразвуковая библиотека:Вот библиотека для использования этого датчика. Вы можете скачать его отсюда.
После того, как вы скачали эту библиотеку. Распакуйте его и скопируйте папку в Мои документы / Arduino / Библиотеки или в другие подобные места.
 Необходимое оборудование
Необходимое оборудование Для выполнения этого эскиза регистра сдвига потребуется следующее оборудование.
3. Строительный контурСделайте следующую схему с помощью вышеупомянутых компонентов.
3.1 Вы можете использовать R-Board от Robo India (совместим с UNO) –
или
3.2 Вы можете использовать оригинальную плату Arduino UNO –
4. Программирование:Когда мы закончили с частью схемы, вот наша программа для этой схемы. Каждая команда следующей программы объяснена в разделе комментариев.
Некоторые характерные особенности библиотеки.
1. Он измеряет время и дальность эхо-сигнала.
2. Диапазон измерения в дюймах и сантиметрах.
3. Максимальный радиус действия 51 см.
4. Можно подключить несколько датчиков.
Он имеет четыре функции. Все эти функции показаны на следующем рисунке.
1. Инициализация
2. Найдите диапазон в см
3. Найдите диапазон в дюймах
4.Найти время эха в миллисекундах
Вы можете скачать этот код (Arduino Sketch) отсюда.
/ HC-SR04 Ультразвуковой модуль дальности на Arduino
// RoboIndia ( www.roboindia.com )
#включают
Ультразвуковой ультразвуковой (6,7); // (ПИН-код триггера, Эхо-ПИН)
int range_inch = 0; // Переменная для хранения диапазона в дюймах
int range_cm = 0; // Переменная для хранения диапазона в сантиметрах
int time_ms = 0; // Varibale для хранения времени эха в мс
void setup () {
Серийный номер .begin (9600); // Инициализация последовательной связи.
}
пустой цикл ()
{
range_inch = ультразвуковой. диапазон (INC); // функция возвращает диапазон в дюймах.
range_cm = ультразвуковой диапазон (см); // функция возвращает диапазон в см.
time_ms = ultrasonic.Timing (); // функция возвращает время эха в мс
Серийный .print (range_inch);
Серийный номер . println («Дюйм»); // Диапазон печати в дюймах
Серийный . Print (range_cm); // Диапазон печати в CM
Серийный номер .println ("см");
Серийный .print (time_ms); // Выводим время эха в мс
Серийный номер .println ("мс");
задержка (200); // ждем немного
}
println («Дюйм»); // Диапазон печати в дюймах
Серийный . Print (range_cm); // Диапазон печати в CM
Серийный номер .println ("см");
Серийный .print (time_ms); // Выводим время эха в мс
Серийный номер .println ("мс");
задержка (200); // ждем немного
}
5. Выход: После загрузки этого скетча откройте монитор последовательного порта, и вы увидите следующий результат.
Примечание: Этот датчик работает по принципу триггера и эха. Поэтому, если вы накроете датчик каким-либо предметом, в этой ситуации он не получит эхо.Таким образом, эта ситуация считается максимальной дальностью.
Если у вас есть вопросы, напишите нам по адресу [email protected]
Благодарности и приветы
Команда разработки контента
Robo India
http://roboindia. com
com
Arduino с использованием обработки, ультразвукового датчика, сервопривода
Введение
В этом проекте я покажу вам, как разработать простое приложение для радара с использованием Arduino и Processing.Этот проект радара Arduino реализован с помощью приложения обработки.
Радар – это система обнаружения объектов на большом расстоянии, которая использует радиоволны для определения определенных параметров объекта, таких как дальность, скорость и положение. Радиолокационная технология используется в самолетах, ракетах, морской пехоте, прогнозировании погоды и автомобилях.
Несмотря на то, что в названии написано Arduino Radar Project, технически проект основан на технологии Sonar, поскольку я буду использовать ультразвуковой датчик для определения присутствия любого объекта в определенном диапазоне.
Обзор проекта
Проект Arduino Radar Project – это скорее визуальный проект, чем реализация схемы. Конечно, я буду использовать другое оборудование, такое как Arduino UNO, ультразвуковой датчик HC-SR04 и серводвигатель, но основным аспектом является визуальное представление в приложении обработки.
Если вы помните, я уже использовал приложение обработки в одном из предыдущих проектов Arduino с использованием датчика MPU-6050. Я предлагаю вам взглянуть на этот проект, прежде чем продолжить (вам не нужно фактически реализовывать проект, но нужно понимать, как он реализуется).
Артикул: НАЧАЛО РАБОТЫ С ARDUINO И MPU6050
В проекте MPU-6050 я использовал Arduino для чтения данных с датчика MPU-6050 и отправки их в приложение обработки через COM-порт (последовательная связь).
На основе полученной информации эскиз в обработке изменит ориентацию модели самолета.
Применяя здесь ту же концепцию, я буду собирать информацию с ультразвукового датчика с помощью Arduino и передавать ее в процессинг, где реализовано простое графическое приложение для имитации экрана радара.
Выходное видео
Прежде чем приступить к монтажной схеме и остальным вещам, взгляните на вывод в следующем видео.
Схема
радиолокатора Arduino Project
Принципиальная схема этого проекта радара очень проста, поскольку требует очень небольшого количества оборудования.
Необходимые компоненты
Оборудование
- Arduino UNO [Купить]
- HC-SR04 Ультразвуковой датчик
- Сервомотор TowerPro SG90
- Монтажный кронштейн для ультразвукового датчика (опция)
- Соединительные провода
- Кабельные перемычки
- Источник питания 5 В
- Кабель USB (для Arduino)
Программное обеспечение
- Ардуино IDE
- Обработка заявки
Схемотехника
Если вы посмотрите на принципиальную схему, то конструкция схемы для этого проекта очень проста. Управляющий штырь сервопривода подключен к контакту 11 Arduino, в то время как контакты TRIG и ECHO ультразвукового датчика подключены к контактам 9 и 10 Arduino соответственно.
Управляющий штырь сервопривода подключен к контакту 11 Arduino, в то время как контакты TRIG и ECHO ультразвукового датчика подключены к контактам 9 и 10 Arduino соответственно.
Отдельный источник питания 5 В (с общим заземлением) подается на серводвигатель и ультразвуковой датчик.
Подготовка оборудования
После выполнения соединений необходимо выполнить один важный этап конструкции (не обязательно). Поскольку ультразвуковой датчик должен проходить по дуге 180 0 (с помощью сервопривода), я использовал монтажный кронштейн, как показано на изображении ниже, для фиксации ультразвукового датчика.
После фиксации датчика монтажный кронштейн привинчивается к серводвигателю, как показано ниже. Поскольку кронштейн и ультразвуковой датчик увеличивают вес сервопривода, обязательно используйте двустороннюю ленту, чтобы надежно прикрепить сервопривод к поверхности.
Этот шаг не является обязательным, и вы можете сделать простую конструкцию из картона, чтобы надежно удерживать ультразвуковой датчик на сервоприводе.
Напоминание об обработке
Если вы новичок в процессинге, это программное обеспечение, основанное на изобразительном искусстве, для обучения программированию.Чтобы загрузить приложение, перейдите по следующей ссылке и выберите свою платформу. Обработка загрузки .
После загрузки Zip-файла (при условии, что платформа – 64-битная Windows) извлеките содержимое zip-файла, и вы сможете найти приложение для обработки (файл .exe).
Следующим шагом будет загрузка специальной библиотеки под названием «Toxi» из по ссылке . После загрузки zip-файла «xiclibs-complete-0020 »извлеките содержимое в папку с тем же именем и переместите эту папку в каталог« Библиотеки обработки »(что-то вроде C: \ Users \ Ravi \ Documents \ Processing \ libraries).
Код
Для этого проекта существует два кода: один для Arduino UNO, а другой – для обработки.
Код Ардуино
Код для Arduino UNO приведен ниже.
Код обработки
Код для обработки заявки приведен ниже.
Рабочий
Изначально загрузите код в Arduino после подключения. Вы можете наблюдать за подметанием сервопривода от 0 0 до 180 0 и снова обратно до 0 0 .Поскольку ультразвуковой датчик установлен над сервоприводом, он также участвует в подметании.
Теперь откройте приложение обработки и вставьте указанный выше эскиз. В эскизе обработки внесите необходимые изменения в выбор COM-порта и замените его номером COM-порта, к которому подключен ваш Arduino.
Если вы обратите внимание на Эскиз обработки, я использовал размер выходного дисплея как 1280 × 720 (при условии, что почти все современные компьютеры имеют минимальное разрешение 1366 × 768) и сделал расчет относительно этого разрешения.
В будущем я загружу новый скетч обработки, где вы можете ввести желаемое разрешение (например, 1920 × 1080), и все расчеты будут автоматически настроены на это разрешение.![]()
