
Регулятор оборотов на ардуино Нано. Максимальный.
схема и прошивки: https://drive.google.com/open?id=0B6x0JsiBUva0N3d2TkJaU0ZXQ2s
прошивки версия 1:https://drive.google.com/open?id=1Un671A441KDwdGvZAtdxABvfq8_S-R1M
улучшения:
1- экран не тухнет на прошивках настройки, а если тухнет, то восстанавливается
2- защита срабатывает не от единичных показаний датчика, а от средних оборотов выводимых на экран. Это позволяет игнорировать единичные помехи и наводки на таходатчике
3- перед и после срабатываний реле установлена пауза чтоб избежать дуги на контактах.
4 – Торможение улучшено. При больших оборотах тормоз не включается во избежании хлопков на щётках. Включение происходит при tic > 15000 что соответствует 8000об\миин вала двигателя при 8 импульсах на 1 оборот вала двигателя. Число можно менять в строке :
while (tic < 12500) {
расчет тиков происходит по формуле 60000000 / (tic * 0.0625 * импульсы на оборот)=об\мин
Прошивки версия 2: https://drive.google.com/open?id=1mqDPmKLJztm5JI3UTQFtrvHOLg3qG722
1. – добавлен коэффициент усреднения показаний таходатчика. kof_sr рекомендовано ставить 1 всегда, при необходимости больше. Настраивается прошивкой _navodki_Holla_obmin_
Подробнее в видео:
Прошивка версия 3: https://drive.google.com/open?id=1eBdKfMg0TPwMS4QL0okS2zty8oU98Um8
Поддерживает разное передаточное число на первой и второй скорости.
 Практически не нуждается в настройке. Необходимо только внести диапазон оборотов и количество импульсов для первой и второй скорости. Плавный пуск настраивается переменным сопротивлением на плате.
Практически не нуждается в настройке. Необходимо только внести диапазон оборотов и количество импульсов для первой и второй скорости. Плавный пуск настраивается переменным сопротивлением на плате.минимальный вариант: http://shenrok.blogspot.com/p/blog-page_95.html
схема вариант для тахогенератора вариант для Холлапанель управления.
Подключение дисплея и панели.
Настройка и проверка аналогична регулятору “всё в одном”
Как бороться с наводками по таходатчику. подходит и для Холла и для тагогенератора:
обсуждение на форуме: http://www.chipmaker.ru/topic/192783/
Вопросы по приобретению: http://shenrok.blogspot.com/p/blog-page_25.html
Имеются файлы для печати корпуса на 3Dпринтере https://drive.google.com/open?id=1Wh2f7TiT8q9g0Z1zG_PsHcFgN_48qgeK
Где я покупаю некоторые комплектующие:
Симистор BTA24-600B:
http://shopeasy.by/cashback/view/oz2a3byzxr9y93zmefgl4vb8eo9r9r6w/?to=https%3A%2F%2Fru.aliexpress.com%2Fitem%2F10pcs-free-shipping-BTA24-600B-BTA24-600-BTA24-Triacs-25-Amp-600-Volt-TO-220-new%2F32393221483.html%3Fspm%3Da2g0s.9042311.0.0.b7eRd1
Радиатор для симистора:
http://shopeasy.by/cashback/view/oz2a3byzxr9y93zmefgl4vb8eo9r9r6w/?to=https%3A%2F%2Fru.aliexpress.com%2Fitem%2F10pcs-Aluminium-TO-220-Heatsink-TO-220-Heat-Sink-Transistor-Radiator-TO220-Cooler-Cooling-7805-21%2F32454598520.html%3Fspm%3Da2g0v.10010108.
 1000013.2.79164bccfrDZcR%26traffic_analysisId%3Drecommend_2088_1_90158_iswistore%26scm%3D1007.13339.90158.0%26pvid%3D412b96ca-be3c-4c64-b2a3-13f9146023b8%26tpp%3D1
1000013.2.79164bccfrDZcR%26traffic_analysisId%3Drecommend_2088_1_90158_iswistore%26scm%3D1007.13339.90158.0%26pvid%3D412b96ca-be3c-4c64-b2a3-13f9146023b8%26tpp%3D1Блок питания:
http://shopeasy.by/cashback/view/oz2a3byzxr9y93zmefgl4vb8eo9r9r6w/?to=https%3A%2F%2Fru.aliexpress.com%2Fitem%2FTSP-05-replace-HLK-PM01-AC-DC-220V-to-5V-mini-power-supply-module-intelligent-household%2F32705471039.html%3Fspm%3Da2g0s.9042311.0.0.oJmz3c
ЖК дисплей:
http://shopeasy.by/cashback/view/oz2a3byzxr9y93zmefgl4vb8eo9r9r6w/?to=https%3A%2F%2Fru.aliexpress.com%2Fitem%2FFreeshipping-LCD1602-LCD-monitor-1602-5V-blue-screen-and-white-code-for-ARDUINO%2F32412091753.html%3Fspm%3Da2g0v.10010108.1000013.14.2521335eucDgif%26traffic_analysisId%3Drecommend_2088_7_90158_iswistore%26scm%3D1007.13339.90158.0%26pvid%3Da0233c8b-3ad6-409d-b85c-af430790af32%26tpp%3D1
реле 5 В:
http://shopeasy.by/cashback/view/oz2a3byzxr9y93zmefgl4vb8eo9r9r6w/?to=https%3A%2F%2Fru.aliexpress.com%2Fitem%2F10PCS-RELAY-5V-SRD-5VDC-SL-C-T73-5V-SONGLE-Power-Relay-NEW-GOOD-QUALITY%2F32794928269.html%3Fspm%3Da2g0s.9042311.0.0.oJmz3c
разъёмы под ардуинку, экран и т.д.
http://shopeasy.by/cashback/view/oz2a3byzxr9y93zmefgl4vb8eo9r9r6w/?to=https%3A%2F%2Fru.aliexpress.com%2Fitem%2F10PCS-2-54mm-40-Pin-Stright-Female-Single-Row-Pin-Header-Strip-PCB-Connector%2F32597304567.html%3Fspm%3Da2g0s.9042311.0.0.oJmz3c
тумблер на 3 положения:
http://shopeasy.by/cashback/view/oz2a3byzxr9y93zmefgl4vb8eo9r9r6w/?to=https%3A%2F%2Fru.aliexpress.com%2Fitem%2F10Pcs-ON-OFF-ON-3-Pin-3-Position-Mini-Latching-Toggle-Switch-AC-125V-6A-250V%2F32807452888.html%3Fspm%3Da2g0s.9042311.0.0.zneC8y
тумблер на 2 положения:
http://shopeasy.by/cashback/view/oz2a3byzxr9y93zmefgl4vb8eo9r9r6w/?to=https%3A%2F%2Fru.aliexpress.com%2Fitem%2F5pcs-3-Pin-SPDT-ON-ON-Mini-Toggle-Switch-6A-125VAC-Mini-Switches%2F32793978799.html%3Fspm%3Da2g0s.9042311.0.0.zneC8y
Электрическая схема стиральной машины
На первый взгляд, схема стиральной машины недоступна для понимания простого пользователя. Однако при изготовлении печатных плат, используется стандартная элементная база. Принцип работы строится на программе управления, которая, в нужный момент дает команду исполнительному механизму.
Однако при изготовлении печатных плат, используется стандартная элементная база. Принцип работы строится на программе управления, которая, в нужный момент дает команду исполнительному механизму.
Сегодня даже школьники могут построить базовые системы управления процессами, используя стандартные команды, написанные на простейших машинных языках. Пример тому – открытая среда программирования, построенная на контроллере «Arduino».
Электрическая схема стиральной машины еще проще. Не верите? читайте наш материал.
Для понимания построения архитектуры управления, посмотрите на иллюстрацию типичной схемы стиральной машины-автомат:
Общие принципы работы управляющего контроллера:
Как работает схема передачи и приема сигналов?
Мозг любой стиральной машины – это контроллер. Его главный элемент: микросхема управления с возможностью программирования. Инженеры системотехники пишут программу, которая на основе заданного режима стирки, и полученной от многочисленных датчиков информации, посылает сигналы на включение остальных узлов агрегата.
На иллюстрации это самый большой элемент с 64 ножками. Разумеется, выход из строя этой масштабной детали приведет к ее замене. Микросхемы не ремонтируются. Ее стоимость сравнима с ценой всей платы управления, поэтому меняют ее целиком.
Остальные детали – это стандартная элементная база: резисторы, конденсаторы, транзисторы, катушки индуктивности, диоды. Любую деталь можно диагностировать, и заменить с помощью паяльника. Стоимость элементов копеечная. При наличии элементарного опыта работы с электроникой, с такой задачей может справиться любой домашний мастер.
Разумеется, для проверки и ремонта нужна принципиальная электросхема. Это не такой уж большой секрет: на профильных сайтах, и даже на интернет ресурсах производителей и сервисных центров, схемы размещены в свободном доступе. Выглядят они обычно так:
По линиям принципиальной схемы можно проследить путь прохождения каждого сигнала, и диагностировать каждую отдельную радиодеталь. Для облегчения работы можно использовать простейший генератор импульсов и осциллограф. Если ваш уровень подготовки позволяет ремонтировать такие платы, оборудование наверняка имеется.
Обычные радиодетали на аналоговом уровне, можно проверить мультиметром.
Как работает исправная электрическая схема стиральной машины?
После включения питания и выбора режима, запускается таймер. Через определенные интервалы дается команда исполнительным механизмам, и с помощью датчиков контролируется исполнение.
Например:
- Дается команда на заполнение бака водой. Открывается клапан (в зависимости от выбранного режима, вода направляется напрямую или через контейнер с моющим средством).
- Затем прессостат дает обратный сигнал про уровень воды, и клапана закрываются.
- После чего, запускается двигатель, обороты которого контролируются таходатчиком.
- После окончания алгоритма стирки, запускается программа отжима и слива воды. Снова контроль с помощью датчиков обратной связи.
- Затем запускается режим полоскания. Тот же принцип: от датчиков приходит информация, на исполнительные механизмы даются рабочие команды.
Из этой информации понятно, что даже при полной исправности модуля управления, работоспособность электрической схемы зависит от состояния датчиков. Разумеется, если исполнительный механизм (например, схема управления двигателем) выйдет из строя, программа стирки не будет работать.
Это не менее сложные устройства, даже в сравнение с контроллером. На иллюстрации электрическая схема контроллера электродвигателя:
Если выявляется неисправность отдельного исполнительного механизма, или схемы датчика, он ремонтируется по такому же принципу. В мастерских проверка производится на стенде, а в домашних условиях – с помощью генератора и осциллографа.
В мастерских проверка производится на стенде, а в домашних условиях – с помощью генератора и осциллографа.
Универсальный модуль управления стиральных машин автомат – Своими руками – отчеты
Данный электронный модуль был разработан, испытан и успешно может устанавливаться вместо штатных модулей на любую модель автоматической стиральной машины с коллекторным двигателем, на других двигателях не испытывался.МК осуществляет функции контроля работы и самодиагностики:
Функция «Контроль люка»
Функция «Контроль подачи воды»
Функция «Автоматический контроль уровня воды »
Функция «Контроль слива воды»
Функция «Контроль подогрева и нагрева воды»
Функция «Контроль протечки воды»
Если установлен аварийный дополнительный третий уровень, или датчик влажности, сольёт воду и отключит СМА. Индикация поломки на дисплее, звуковой и световой сигнал
В программе заложена функция подогрева воды, при наборе воды, измеряется температура воды, если она ниже +20° C , то машина подогреет воду перед выполнением установленной программы стирки до +20° C , а потом перейдёт к выполнению программы и нагреву воды установленной в программе. Если Вы хотите стирать в холодной воде, выставив в программе 0° C т.е. без нагрева, машинка не будет подогревать и нагревать воду.
Пресcостат на два уровня (один для стирки, второй для полоскания), предусмотрен третий уровень, но он чисто аварийный, чтобы не было перелива, при установке дополнительного датчика возможна функция (Защита от протечек воды на пол)
Выбор необходимого режима работы, производится кнопками, которые устанавливаются на лицевую панель, вместе с LCD дисплеем (16×2) на котором видно, выбранный режим, температуру, количество полосканий и скорость при отжиме, при выполнении выбранной программы отображает, индикацию этапов программы.

В программном обеспечении заложены самые необходимые режимы для стирки белья, я не стремился удивить количеством стирок и функций
Основные его достоинства — универсальность, простое схемотехническое решение, доступные и не дорогие компоненты, высокая ремонтопригодность, очень простое управление.
Несмотря на простоту модуля, удалось реализовать полноценную функциональность СМА, с отличными результатами стирки.
Вторичное использование деталей стиральной машины, микроволновой печи, для изготовления поворотного стола
В этой статье мастер-самодельщик поделится своим опытом использования деталей от старой бытовой техники. Мастер будет делать поворотный стол с регулировкой скорости вращения + миксер для перемешивания формовочной массы используемой для литья. В дальнейшем он планирует дополнить аппарат, для использования его при сварочных работах и для гончарных работ. Цель его работы – использование б/у техники, переделка под свои нужды.
Инструменты и материалы:
-Старая стиральная машинка:
-Старая микроволновая печь:
-УШМ;
-Слесарный инструмент;
-Паяльные принадлежности;
-Краска;
-Доска;
-Крепеж;
-Детали от старого плуга;
-Фанера;
-Листовой металл;
-Рулетка;
-Маркер;
-Акрил;
-Нож;
-Циркулярная пила;
-Ленточно-пильный станок;
-Токарный станок;
-Сверлильный станок;
-Фрезер;
-Столярный клей;
-Фен;
Список большей части деталей будет приводится по мере выполнения работ.
Шаг первый: разборка
Сначала мастер разбирает стиральную машинку и микроволновую печь. При разборке получается очень много деталей, некоторые из них мастер будет использовать в данном проекте, а часть оставит для следующих работ.
Шаг второй: подготовка корпуса
Корпус от стиральной машинки будет служить и корпусом поворотного стола. В нижней части корпуса, он хочет сделать отсек для хранения.
 Мастер вырезает часть корпуса и окрашивает.
Мастер вырезает часть корпуса и окрашивает.Шаг третий: подшипники
Для поворотного стола будет использована обойма с подшипником, которые установлены на барабане стиральной машины.
Устанавливаться обойма будет между двумя дубовыми досками с отверстием. Доски стягиваются болтами.
Шаг четвертый: верхняя крышка
Крышка стиральной машины была сломана, и мастер делает новую деревянную.
Шаг пятый: вращающаяся платформа
Вращающаяся платформа – это вырезанные из фанеры и склеенные круги. Платформа крепится к креплению, снятому с барабана.
Затем ось крепления, вместе с закрепленной платформой, устанавливается в подшипник. С другой стороны, устанавливается колесо. Колесо имеет выпуклую форму и при установке штатно будет цеплять за корпус. Мастер вырезает паз с другой стороны колеса, переворачивает его и устанавливает на вал.
Шаг шестой: двигатель
Двигатель будет использоваться от стиральной машинки. Просто взять и подключить такой двигатель без нагрузки нельзя.
Мастер приводит несколько схем запуска такого двигателя.
Именно для этого проекта мастер использует схему управления двигателем с помощью Ардуино.
Ознакомится с принципом работы можно здесь.
Библиотеку можно скачать здесь.
Ниже можно скачать файл со схемами.
универсальный контроллер двигателя переменного тока schemat.pdf
Основной принцип этой схемы состоит в том, что Arduino принимает сигнал переменного тока от тахометра двигателя, чтобы определить фактическую скорость двигателя и сравнить ее с «заданной скоростью» (сколько об / мин вы хотите, чтобы двигатель вращался). Затем он использует алгоритм PID, чтобы определить, когда отправлять управляющие импульсы в оптронный симистор, который, в свою очередь, активирует и пропускает импульсы сетевого напряжения на двигатель.
Для определения Ардуино момента срабатывания симистора мастер собирает следующую схему.
PC816 datasheet.pdf
Для защиты от скачков напряжения мастер использует резистор R14 и конденсатор C4.
 Также он добавил 400В варистор параллельно с R14 и C4 (не показано на схеме).
Также он добавил 400В варистор параллельно с R14 и C4 (не показано на схеме).M0c3023M datasheet.pdf
Шаг седьмой: дисплей
На дисплее отображается заданное значение об / мин и реальное измеренное число оборотов в минуту. В коде настроено обновление каждые 2 секунды. При более частом обновлении у Arduino могут возникнуть проблемы с другими операциями PID.
В проекте используется ЖК-дисплей 16×2 HD44780 с последовательным интерфейсом. Для показа мастер использовал большую библиотеку, написанную Ф. Мальпартидой. На той же странице также есть несколько полезных заметок о том, как определить, какой модуль I2C вы используете, и о других способах устранения неполадок.
Шаг восьмой: демонтаж деталей
Как вы уже заметили мастер, использует детали вторичные, уже используемые ранее.
Для проверки мастер устанавливает на край платформы фрезу и запускает двигатель стола. таким образом мастер и проверил работу двигателя и отфрезеровал край платформы.
Шаг десятый: лицевая панель
Лицевая панель изготовлена из дубовой доски. Мастер отрезал ее по размерам и вырезал окна для электронных деталей.
Шаг одиннадцатый: дополнительный шкив
Мастер решил добавить еще один шкив из-за сложности регулировки оборотов при 500 об / мин. Из детали от старой шлифмашинки мастер вытачивает шкив и нарезает на нем канавки для поликлинового ремня.
Вырезает шкив из фанеры. Прикрепляет металлический шкив к фанерному и устанавливает в корпус машинки. Надевает ремни.
После модернизации привода, при оборотах двигателя 3750 об / мин, платформа вращается со скоростью 50 об/мин.
Шаг двенадцатый: таймер
Можно было установить таймер полностью, но мастер хотел, что бы он вписывался в дизайн устройства. Тогда он его разобрал и вмонтировал в панель.
Шаг тринадцатый: накладка
Для производства фотосъемки мастер установил на поворотный стол накладку из акрила.
Шаг четырнадцатый: миксер
Мастер увлекается отливкой деталей из металлов.
 Для изготовления форм он использует формовочную массу собственного приготовления. В состав смеси входит песок, глина, вода и еще некоторые ингредиенты. Для перемешивания формовочной массы мастер, на базе поворотного стола изготовил миксер или мешалку.
Для изготовления форм он использует формовочную массу собственного приготовления. В состав смеси входит песок, глина, вода и еще некоторые ингредиенты. Для перемешивания формовочной массы мастер, на базе поворотного стола изготовил миксер или мешалку.Из старого оцинковочного листа металла мастер вырезает дно емкости. Диаметр дна соответствует диаметру поворотной платформы.
Затем вырезал и закрепил стенки.
Делает и закрепляет раму, на которой будет крепится механизм для перемешивания массы.
Механизм перемешивания сделан из двух металлических колес и детали в виде плуга.
Мешалка отлично справляется с работой.
Вот такое устройство можно сделать из старой бытовой техники.
Процесс изготовления мешалки можно посмотреть на видео на видео.
Так же можно посмотреть подробное видео по подключению двигателя.
Источник (Source) Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.
Регулятор оборотов коллекторного двигателя Pid регулятор на Arduino –
YouTube
На видео показана работа коллекторного двигателя от стиральной машины с pid регулятором построенном на плате Arduino. С встроенной защитой от перегрева и цифровым индикатором оборотов.Скачать схемы прочитать подробное описание можно здесь http://istochnikpitania.ru/index.files/arduino.files/1_arduino.htm
С встроенной защитой от перегрева и цифровым индикатором оборотов.Скачать схемы прочитать подробное описание можно здесь http://istochnikpitania.ru/index.files/arduino.files/1_arduino.htm
Регулятор оборотов на ардуино
YouTube
тема в блоге: http://shenrok.blogspot.com/p/pid.html
YouTube
В процессе моей эксплуатации плат Arduino Nano самой распространенной поломкой оказался выход из строя плат в следствие КЗ. Делюсь с вами опытом по починке плат
YouTube
Мой фейсбук https://www.facebook.com/profile.php?id=100020454427146 Все вопросы по покупке и т.д. задавайте здесь https://infinitysav.com/
YouTube
Простой и мощный регулятор оборотов для электроинструмента и бытовых приборов собрать легко. ☑ ССЫЛКА НА ДИММЕР МОЩНОСТЬЮ 4000 Вт – http://ali.pub/2ubeel ☑ Д
YouTube
Электродвигатели нужны всем и мы постоянно ими пользуемся в этом видео мы рассмотрим подключение коллекторного электродвигателя к ардуино. ▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂▂
YouTube
Вы узнаете для чего нужен фильтр помех в стиральной машине автомат, а так же как его заменить или запустить стиральную машину без него.
YouTube
ПРИОБРЕТАЙТЕ ПЛАТЫ НА САЙТЕ: https://platapro.ru/ Все видео: https://www.youtube.com/channel/UCPWl25ipwnf6D0vK-ETCjQw/videos изготовление на заказ,отправка по Р
YouTube
Контроллер трехфазного двигателя для электровелосипеда. H-Мосты из MOSFET. Управление мощным двигателем с помощью Arduino.
YouTube
По немногочисленным просьбам немного отечественного производителя, в частности про микросхему фазового регулятора мощности К1182ПМ1 и проект RDC1-0018 от чип и
YouTube
Такой регулятор оборотов был куплен мною на Алиэкспресс для подключения двигателя от стиральной машинки и т. д.При его подключении появляется возможность выбират
д.При его подключении появляется возможность выбират
YouTube
Блок PID регулятора в программе Flprog на практике Скетч Flprog и схема подключения: https://yadi.sk/d/gcPH_lLN3QTUKQ Блок энкодера: https://yadi.sk/d/KFYpLfo
YouTube
При ремонте регулятора использовался: UT71E мультиметр цифровой – http://www.elenblog.ru/UT71E Аккумуляторная Отвертка WOWSTICK – http://www.elenblog.ru/Wowst
YouTube
Теl +4915221965777 Skype Nikolajf3327
YouTube
Приобрёл у ребят – http://www.elenblog.ru/ElektroPlata_ru Регулятор Оборотов с Поддержанием мощности для коллекторного двигателя от стиральной машинки. Регулято
YouTube
Сегодня играемся с компонентами ПИД-регулятора Конкурс – Разыгрываем набор Arduino “Матрешка Х”: Правила следующие: 1. Подписыватесь на мой канал на youtube (h
YouTube
В этом видео описано как можно использовать Arduino для управления коллекторным двигателем на 220 вольт. Страничка в блоге http://www.motor-r.info/p/blog-p
YouTube
В этом видео рассказано как управлять коллекторным двигателем от стиральной машины с помощью Arduino , используя обратную связь по таходатчику для поддержания
YouTube
В этом выпуске научимся управлять бесколлекторными (бесщёточными) моторчиками при помощи Ардуино (Arduino), используя стандартные регуляторы оборотов (ESC). При
YouTube
Заказать плату можно тут – http://detectori.com.ua/shop/415/desc/plata-reguljator-oborotov-bez-poteri-moshhnosti-dlja-dvigatelej-ot-stiralnykh-mashin-tda1085-co
YouTube
Прошивка модуля стиральной машины Indesit
Решил написать в эту рубрику, поскольку более подходящей, типа «Бытовая техника», не нашел, а эта статья непосредственно относится и к электронике, и к бытовой технике, 🙂
🙂Вступление
Началось все с того, что залил много моющего в СМА Indesit WIL85EX/TE/Y. В итоге полезла пена и попала на блок управления (мозги), в результате чего машинка просто перестала включаться.
Но! Не все потеряно. Начал читать, много где пишут, что нужно подождать 5-10 минут, и вот, чудо..! Заморгали индикаторы, которые указывали на ошибку F-12 — ошибка связи блока управления с модулем. Чаще всего из-за слетевшей прошивки.
Поехали дальше… Снял мозги, вынул из пластмассового корпуса и начал внимательно рассматривать. Была влага на краю плате, в результате чего, как я полагаю, и произошел сбой, но из строя ничего не вышло! Процессор стоит SP101655, либо же MC9S08GB60, от Motorola.
Под него, оказывается, нужен специальный программатор — USB BDM.
Ну… Прошить стоит 300 грн., а программатор — 390, на момент покупки. Поэтому решил купить программатор и сделать все сам, нежели отдам 300 за прошивку, завтра опять пойдет пена, и опять платить… А то и хуже!
Вот так выглядит программатор (снизу) и блок управления (сверху)
Внутри
Прошивка
Где же брать прошивку? Я не стал рыться в просторах паутины, и купил прошивку за $2. По крайней мере точно знаю, что она подойдет.
Теперь перейдем к распиновке. Всего необходимо 4 контакта: VCC — питание, GND — земля, RST — сброс, BKGD — линия, по которой передаются данные..
На субмодуле с процессором это выглядит так
Если же Вы хотите прошить не выпаивая модуль, как делал я, то рекомендую питание подпаивать к выводам конденсатора C007.
Подпаялся, открыл программу, которая шла в комплекте. Если у кого нет, то скачать можно здесь, и драйвера также.
Как уже говорил, открываем программу, выбираем напряжение 3.3В, важно не ошибиться, иначе спалите проц. Затем выбираем прошивку, вводим частоту (см. видео), и прошиваем. Прошили…
Теперь, при первом тесте, рекомендую заранее отпаять провода с субмодуля, ибо это может сказываться на правильной работе.
Если все отлично работает, то поздравляю! Вы восстановили СМА, и скорее всего, сэкономили немало денег.
Видео, в котором я рассказал все по шагам.
Собираем сервопривод на BLDC под Mach 3. (Assembling a servo on BLDC for Mach 3)
Ссылка на видео на YouTube https://www.youtube.com/watch?v=gRGOAKG3-xc
Материалы для скачивания https://drive.google.com/open?id=1vDNe7v3wYZje3EMbLtHv24kfpGZmkDoN
Сегодня запускаем двигатель BLDC (Brush Less Direct Current). Переводится аббревиатура, как «Без щеток, постоянного тока». Поскольку BLDC не способен сам по себе работать в шаговом режиме, а просто покрутить вал не так интересно, мы сделаем простой, но полноценный сервопривод. Данный сервопривод протестируем в режиме контура скорости, также запустим его в режиме контура положения, посмотрим на режим удержание положения, а также подключим наш сервопривод к Mach 3 и посмотрим, как он будет работать Mach 3.
В качестве контроллера возьмем Arduino DUE. Предвижу шквал критики в свой адрес по поводу контроллера, но цель данного видео не сделать промышленный вариант сервопривода, а показать принцип работы двигателя BLDC и принцип построения сервопривода. Для этих целей, на наш взгляд нужно использовать наиболее простое наглядное решение. Поэтому DUE. Также для критиков сразу отмечу, что мы не делаем сервоприводов на arduino. В данном видео мы сделаем анализ почему обычные контролеры не подходят для построения промышленных приводов и каким требованиям должен удовлетворять контроллер, для построения промышленного привода.
Прототип промышленного сервопривода мы разберем в третьем видео, в котором будет запускать двигатель PMSM. Как учили в учебном заведении, прежде чем что-то сделать, нужно провести обзор литературы. Мы поступим примерно таким же способом. Вскроем сервопривод Leadshine, сервопривод Hiwin и частотник Delta и посмотрим какие контроллеры установлены в промышленных приводах. Забегая вперед, скажу, что это будут не Atmel не PIC и не STM. PMSM мы будем запускать на таком же контроллере, который установлен в сервоприводах Hiwin серии D2.
Мы поступим примерно таким же способом. Вскроем сервопривод Leadshine, сервопривод Hiwin и частотник Delta и посмотрим какие контроллеры установлены в промышленных приводах. Забегая вперед, скажу, что это будут не Atmel не PIC и не STM. PMSM мы будем запускать на таком же контроллере, который установлен в сервоприводах Hiwin серии D2.
Итак поехали.
1. Сам двигатель. Это будет двигатель от сервопривода Leadshine – ACM 604. Мощностью 400 Вт. Благодаря наличию датчиков холла, мы сможем его запустить в режиме BLDC. Также данный двигатель содержит инкрементный энкодер с количество рисок 2500. Выход инкрементного энкодера – это квадратурный дифференциальный сигнал A B и индексной меткой Z в соответствии со стандартом RS-422. Сигналы с датчиков Холла – U V W также дифференциальные. Дифференциальные сигналы являются более помехозащищенными по сравнению с обычными TTL и передаются по витым парам. Силовая часть запитывается на три фазы. По энкодеру мы будем отслеживать положение вала двигателя, по датчикам холла будет определяться положение постоянных магнитов относительно обмоток статора.
2. Драйвер бесколлекторных двигателей. Будем использовать DRV8323 от Texas Instruments. Этот драйвер с обвязкой распаян вот на такой платке. Цена платы в магазине TI 79$. Тянет эта платка 15 ампер в длительном режиме на напряжении до 54В, а это целых 810 Вт, так, что на наш двигатель с двукратным запасом хватит. Mosfet-ы от TI поражают, вот эти чипы тянут 15 ампер без каких-либо радиаторов. Конфигурируется драйвер по шине SPI. Драйвер имеет встроенный управляемый преобразователь напряжения и сконфигурирован на данной плате на 3,3В с током до 650 mA. Питается этот преобразователь от напряжения питания двигателя. Силовое питание драйвера и двигателя подключается вот к этим клеммам, к этим клеммам подключаются силовые обмотки двигателя. Особенностью данного драйвера, является, то, что он может работать в режиме PWMx1. Это как раз тот режим, что нам нужен, плюс ко всему драйвер имеет встроенную логическую таблицу на переключение Mosfet-ов в зависимости от положения ротора двигателя, т.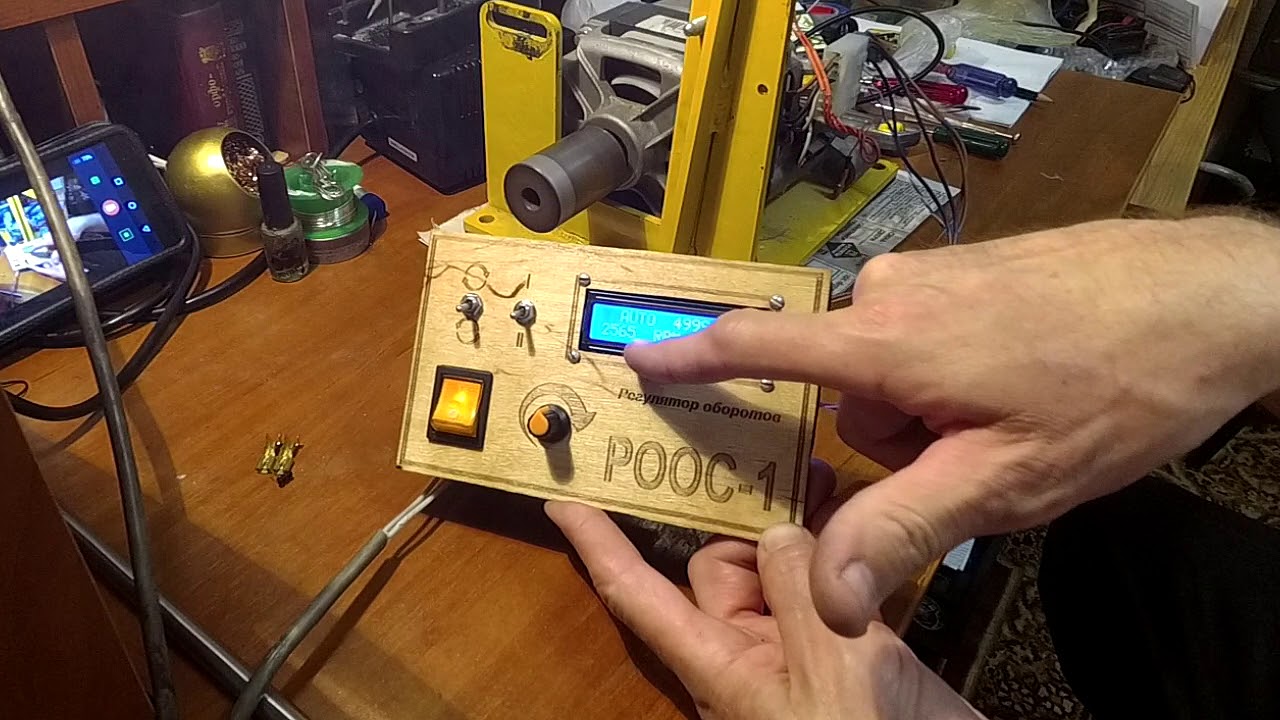 е. от сигналов с датчиков холла. Причем делает это на аппаратном уровне, а не на уровне контроллера в цикле, съедая и без того драгоценные вычислительные ресурсы контроллера.
е. от сигналов с датчиков холла. Причем делает это на аппаратном уровне, а не на уровне контроллера в цикле, съедая и без того драгоценные вычислительные ресурсы контроллера.
3. Далее нам потребуется Arduino DUE. Один из самых быстрых контроллеров в семействе ардуино. Одной из самых важных характеристик сервопривода – это время серво цикла, т.е. время за которое контроллер получил данные обработал их и выдал управляющее воздействие. Чем меньше данное время, тем лучше регулирование и тем более качественным считается сервопривод. Поэтому берем контроллер побыстрее.
4. Для подсчета импульсов квадратурного энкодера нам нужен счетчик. Имея максимальную скорость двигателя по каталогу 4500 об/мин и разрешение энкодера в 2500 рисок нам нужно считать импульсы с частотой 4500/60*2500*4 = 750 кГц. (а если бы количество рисок было 5000, то мы бы получили все 1,5 МГц.). Понятно, что обычный контроллер не сможет считать импульсы с такой скоростью. Для этих целей возьмём аппаратный счетчик для квадратурных сигналов. Микросхемка называется IC-MD. Имеет разрядность счетчика до 48 бит и может считать импульсы с частотой до 40 МГц. Данная микросхема на вход может принимать сразу дифференциальный сигнал, чем мы и воспользуемся. Получать данные с квадратурного счетчика наша Arduino будет по SPI.
5. Далее нам потребуется высокоскоростной квадратурный дифференциальный линейный ресивер AM26LV32. Работает на частоте 32 МГц, напряжение питания 3,3 В. Дело в том, что драйвер DRV8323 принимает на вход датчиков холла сигналы TTL, а как мы помним с двигателя у нас идут дифференциальные сигналы RS-422. Квадратурный ресивер будет принимать на вход дифференциальный сигнал, а выдавать TTL, по сути, выполнять функцию преобразования сигналов.
6. Поскольку мы задались целью также подключить наш сервопривод к Mach 3 и поуправлять приводом с его помощью, нам потребуется любой контроллер для Mach 3. Я буду использовать самый простой USB контроллер, который на выходе эмулирует обычный 25 пиновый LPT порт. С данного порта мы заберем два сигнала. Первый сигнал – это Step. Он у нас будет на втором пине. И второй сигнал – это DIR он у нас будет на 6-м пине. И не забываем землю. Максимальная частота импульсов Step с данного контроллера 100 кГц. Не очень много, но для теста нам хватит. Для того чтобы раскрутить наш двигатель на максимальные обороты, нам необходимо 750 кГц. При коэффициенте делителя 1 к 1. Например в своих станках мы используем, в том, числе контроллер SmoothStepper, который способен выдавать сигнал Step с частотой до 4 МГц.
С данного порта мы заберем два сигнала. Первый сигнал – это Step. Он у нас будет на втором пине. И второй сигнал – это DIR он у нас будет на 6-м пине. И не забываем землю. Максимальная частота импульсов Step с данного контроллера 100 кГц. Не очень много, но для теста нам хватит. Для того чтобы раскрутить наш двигатель на максимальные обороты, нам необходимо 750 кГц. При коэффициенте делителя 1 к 1. Например в своих станках мы используем, в том, числе контроллер SmoothStepper, который способен выдавать сигнал Step с частотой до 4 МГц.
7. Далее нам потребуется еще один счетчик, который будет считать импульсы Step/Dir. Для этих целей возьмем микросхемку LS7366 – это 32 битный квадратурный счетчик, способный считать импульсы с частотами до 20 или 40 МГц, в зависимости от питающего напряжения. Данная микросхема в отличии от IC-MD требует некоторой обвязки, поэтому воспользуемся готовым модулем от SuperDroidRobotics. Данная микросхема умеет сразу считать Step/Dir, хотя если немного подумать, то эту же функцию можно осуществить и на микросхеме IC-MD. Наш контролер также будет получает значение счетчика по SPI.
8. Из необходимого нам еще потребуется три светодиода, кнопка, два сопротивления 1,2 кОм, три сопротивления 500 ом. Два сопротивления 4,7 кОм.
(Схема доступна по ссылке ниже)
Электрическая схема серводрайвера, а также схемы на все модули и даташиты будут доступны по ссылке под видео.
Собирать будем по этапам.
На первом этапе
Подключим дифференциальный приемник к датчикам холла и включим светодиоды через сопротивления 500 Ом на выходы дифф. приемника, чтобы видеть визуально, как будут срабатывать датчики холла.
Для подключения энкодера двигателя к макетной плате я сделал вот такую распайку. Здесь, две группы. Первая группа это квадратурный энкодер, вторая группа, это датчики холла.
Питать цифровую часть нашего серводрайвера будет 3,3 вольтами от преобразователя, который встроен в драйвер DRV8232.
Сам драйвер будем питать от лабораторного блока питания напряжением 42В.
Включаем питание. Медленно проворачивая вручную вал двигателя, можно видеть, как срабатывают датчики холла. Три датчика имеют всего 6-ть логических положения, положения в котором все датчики включены или выключены логически исключены. Можно видеть, что за один полный оборот вала двигателя датчики проходят 4-е полных цикла, что свидетельствует о том, что в двигателе 4-е пары полюсов.
На втором этапе
Подключим наш квадратурный счетчик и Arduino. Терминальные резисторы устанавливать не будем ввиду того, что длина дифференциальной линии мала. Сконфигурируем счетчик энкодера по SPI на разрядность счета в 32 бит. Исходный код для Arduino я также выложу под видео. Будем в бесконечном цикле с периодичностью в 1 секунду считывать показания счетчика и выводить их в консоль. Посмотрим, как это работает. Можно видеть, что примерно один полный оборот вала двигателя соответствует 10000 импульсов. У данного счётчика есть особенность, первые два импульса индексной метки он сбрасывается, таким образом он калибрует количество импульсов между Z метсками.
На третьем этапе
Подключим драйвер мотора. Датчики холла подключим к контактам на боковых пинах. У драйвера есть отдельные пины для подключения датчиков холла, но они не подключены на самой плате. Посмотрим на схему. Если есть желание подключить датчики холла именно к этим пинам нужно будет вооружившись паяльником впаять сюда перемычки. Сигнал ШИМ будем брать с 9 пина Arduino. Также нужно не забыть про Enable. В отличии от драйвера шагового мотора DRV8711, который мы запускали в первом видео, у нашего драйвера DRV8323 SPI не будет работать, если не подан сигнал Enable. Также подключим кнопку, она будет задавать направление.
Конфигурируем драйвер на режим PWMx1. Зададим некоторое значение ШИМ. ШИМ будем задавать с разрядностью 12 бит. С периодичностью в 1 секунду будем выводить значение счетчика энкодера в консоль. Прошиваем ардуино и видим, как двигатель начал вращаться. Кнопка меняет направление вращения мотора.
Важным моментом при запуске BLDC мотора, является соблюдение правильного подключения фаз двигателя и чередования датчиков холла. Правильное подключение также можно найти опытным путем. Подключаем фазы двигателя произвольным образом, а конфигурацию датчиков холла подбираем опытным путем. Ток при этом, который задается ШИМ сигналом, желательно установить как можно меньше, ну это так, чтобы двигатель не скакал как сумасшедший. Всего конфигураций подключения датчиков холла 6 их можно просто перебрать. Положение, в котором двигатель вращается с самым минимальным заданным током и не имеет мертвых зон (т.е. положений ротора в которых мотор останавливается) и является правильным.
Одним из недостатков режима BLDC от PMSM, является, то, что поле статора изменяет направление дискретно, что вызывает скачкообразное изменение момента двигателя, а также сопровождается незначительной вибрацией при работе двигателя. Да этот эффект несколько нивелирован увеличением количества пар полюсов двигателя, но он все равно присутствует. Попробуем увидеть этот эффект. Для этого заставим вращаться мотор максимально медленно. Можно видеть, как при переключении датчиков холла происходит скачкообразное изменение скорости вращения двигателя.
Теперь немного теории, что такое сервопривод и почему его основная настройка – это коэффициенты ПИД регулятора.
(рисуем схему)
Возможно, Вы знаете, что сервопривод может работать в трех режимах:
1. Режим поддержания заданного момента на валу.
2. Режим поддержания заданной скорости.
3. Режим следования заданного положения.
Давайте разберемся как это достигается. Каждый из этих режимов реализуется так называемым контуром регулирования, контур регулирования момента, скорости и положения.
Рассмотрим на примере контура регулирования скорости. Мы задали некоторое значение скорости, которое хотим достигнуть, сервопривод это значение сравнивает с текущим значением и посредством ПИД регулятора осуществляет регулирование. Далее опять сравнивает заданное значение (причем это значение могло уже измениться, мы уже могли задать новое) с текущим значением и опять осуществляет регулирование посредством ПИД регулятора. Таким образом сервопривод циклично сравнивает текущее значение скорости с заданным и осуществляет регулирование посредством ПИД регулятора. Именно время на такую итерацию и называется временем сервоцикла. Логично, что чем меньше время сервоцикла, тем лучше мы осуществляем регулирование и быстрее достигаем заданного значения. Величина обратная времени называется частотой сервоцикла. Эта частота разная для разных контуров регулирования, как правило, выше всего для момента (или что тоже самое – тока), у контура положения меньше и у контура скорости медленнее всего. Для применения в ЧПУ наибольший интерес представляет частота сервоцикла контура положения. В китайских сервоприводах частота сервоцикла составляет 500 Гц, в сервоприводах среднего класса Delta Hiwin 1-1,5 кГц. В Yaskawa и Panasonic – это 5-6 кГц. В Специализированных контроллерах 20-25 кГц.
Далее опять сравнивает заданное значение (причем это значение могло уже измениться, мы уже могли задать новое) с текущим значением и опять осуществляет регулирование посредством ПИД регулятора. Таким образом сервопривод циклично сравнивает текущее значение скорости с заданным и осуществляет регулирование посредством ПИД регулятора. Именно время на такую итерацию и называется временем сервоцикла. Логично, что чем меньше время сервоцикла, тем лучше мы осуществляем регулирование и быстрее достигаем заданного значения. Величина обратная времени называется частотой сервоцикла. Эта частота разная для разных контуров регулирования, как правило, выше всего для момента (или что тоже самое – тока), у контура положения меньше и у контура скорости медленнее всего. Для применения в ЧПУ наибольший интерес представляет частота сервоцикла контура положения. В китайских сервоприводах частота сервоцикла составляет 500 Гц, в сервоприводах среднего класса Delta Hiwin 1-1,5 кГц. В Yaskawa и Panasonic – это 5-6 кГц. В Специализированных контроллерах 20-25 кГц.
Поскольку регулирование в сервоприводе осуществляется посредством ПИД регулятора, рассмотрим кратко, что такое ПИД регулятор.
(Схема доступна по ссылке ниже)
ПИД регулятор — это, по сути, математический алгоритм, который рассчитывает корректирующее воздействие, т.е. например на сколько нам нужно увеличить текущую скорость, чтобы достигнуть заданную. Величина корректирующего воздействия состоит из трех составляющих, пропорциональной, интегральной и дифференциальной. Данные составляющие входят в регулирование с некоторыми коэффициентами Kp, Ki, Kd (пропорциональный коэффициент, интегральный и дифференциальный). Чем больше коэффициенты, тем быстрее регулирование и жёстче система, но тем больше вибраций и ее неустойчивость. Именно подбор этих коэффициентов и является основной настройкой сервопривода. Эти коэффициенты разные для разных контуров регулирования.
Запустим контур скорости. Для этого мы будем сачить скорость двигателя, сравнивать полученное значение с заданной скоростью, рассчитывать ПИД регулятором корректирующее воздействие, задавать его. И будем делать это в бесконечном цикле.
И будем делать это в бесконечном цикле.
Давайте запустим наш двигатель в режиме контура скорости. Зададим скорость в 40000 импульсов в /секунду (это 4 оборота в секунду).
Если я пытаюсь остановить двигатель рукой, то драйвер начинает увеличить ток, но при этом скорость остается неизменной в пределах погрешности регулирования.
Аналогично контуру скорости мы можем сделать контур положения. Для этого будем считывать текущее положение с энкодера, рассчитывать ПИД регулятором корректирующее воздействие, задавать его и будем делать это в бесконечном цикле. Если заданное положение будет равно 0, то соответственно при попытке провернуть вал двигателя, серво драйвер будет пытаться вернуть вал мотора в исходное положение. Оценим также время серво цикла в этом режиме.
Добавим в нашу схему контроллер для Mach 3 и счетчик импульсов Step/Dir. Значение с данного счетчика будем читать в Arduino по SPI. Таким образом будем задавать значение для ПИД регулятора. Оценим также время серво цикла в этом режиме. В Mach 3 зададим количество импульсов на 1 мм = 2000, ускорение 500 мм/с2, скорость максимальную 2250 мм/мин. Данная величина скорости ограничена максимальной частотой импульсов step используемого контроллера.
К сожалению, Arduino не позволяет силами своего АЦП построить контур тока. Драйвер двигателя выдает аналоговый сигнал пропорциональный току, но для того, чтобы его включить в АЦМ нужно также подать опорное напряжение. DUE отказалась работать с внешним опорным напряжением, да и считать нужно ток в каждой из фаз, а для каждой из фаз свое опорное напряжение.
1. Аппаратные счетчики энкодера и Step/Dir. (быстродействие от 20 МГц)
2. Быстродействующие АЦП. (разрядность не менее 16 bit, скорость не менее 40 ksps).
3. Высокоскоростной 6х канальный ШИМ, разрядность не менее 16 bit и частота не менее 50 кГц.
4. Аппаратный ПИД.
5. Аппаратный FOC (Field Orientation Control).
6. Частота сервоцикла по положению 5 кГц.
Полностью автоматическая стиральная машина, часть 1 – Проект Arduino – Bincoder
История
Раньше я стирал одежду в стиральной машине с вертикальной загрузкой, пока ее панель управления не сгорела, поэтому я решил отнести ее к специалистам и, к счастью, отремонтировать! они просто дали мне оценку, которая почти равна реальной цене машины, да! Между тем, пока я играл с платами Arduino и esp8266 в своем гараже, лампочками и прочим. А потом на пороге отправки Стиральной машины в металлолом у меня в голове загорелась лампочка! ха-ха, почему я не могу самому сделать из нее небольшую плату управления, в конце концов, мы правильно поняли маленького зверя Arduino ???!.И это была неплохая идея по сравнению с лампочками, верно?!.
А потом на пороге отправки Стиральной машины в металлолом у меня в голове загорелась лампочка! ха-ха, почему я не могу самому сделать из нее небольшую плату управления, в конце концов, мы правильно поняли маленького зверя Arduino ???!.И это была неплохая идея по сравнению с лампочками, верно?!.
Итак, я начал работать над этим,
Модель стиральной машины Samsung WA65h5200HA (с верхней загрузкой).
Проект
Наша цель в этом проекте – смоделировать работу платы управления с помощью Arduino. Так что давайте пропустим остальную часть истории о том, как я отнес ее в свой гараж, и приступим к работе!
Разборка
Стиральная машина состоит из основных компонентов:
Корпус и ванна, Наблюдение за движениями
Как известно, ванна – это то место, куда мы кладем одежду.Он состоит из двух частей: емкости (бака) цилиндрической формы и вращателя, который вращается по часовой стрелке и против часовой стрелки во время стирки. Движения во время операций:
По часовой стрелке и против часовой стрелки вращение ротатора во время стирки и полоскания (ванна остается в этой точке).
Вращение ванны и вращателя по часовой стрелке при сливе воды во время отжима сухим способом.
Выводы:
Должно быть что-то, чтобы вращать двигатель в обоих направлениях, вероятно, две катушки.
Должна быть зубчатая передача для слива воды, вращения и разрушения ванны.
Должна быть система передач, позволяющая переключаться между простым вращением ротатора на движение ванны и вращением.
Гидравлические узлы, Наблюдение за движением
Наиболее распространенными блоками управления водой, которые можно найти в обычной стиральной машине, являются контроллер впуска воды, который контролирует поток воды в бак, и контроллер выпуска воды (слива), который контролирует поток воды из бака.В моей стиральной машине входной контроллер использует переключатель управления потоком переменного тока 230 В, который выглядит примерно так:
В моей стиральной машине впускной контроллер использует переключатель управления потоком переменного тока 230 В, который выглядит примерно так:
Работа: Когда 230 В переменного тока подается между двумя входными ручками, клапан внутри устройства открывается, и вода может стекать в ванну. Примечание: в некоторых стиральных машинах есть две эти машины: одна для обычного ввода воды, а другая – для горячей воды.(в моей машине используется синий провод для фазы и общий желтый провод для заземления, который также подключен к секции двигателя)
Примечание: в некоторых стиральных машинах есть две эти машины: одна для обычного ввода воды, а другая – для горячей воды.(в моей машине используется синий провод для фазы и общий желтый провод для заземления, который также подключен к секции двигателя)
Аналогичным образом для дренажной системы используется дренажный насос / шестеренчатая система для слива воды через выпускное отверстие.
После внимательного наблюдения, моя стиральная машина выполняет операцию слива воды, открывая клапан, прикрепленный к нижней части бака с помощью зубчатого троса, который натягивается с помощью электродвигателя, что позволяет воде стекать. (Другое наблюдение заключалось в том, что если мы попытаемся повернуть главный двигатель по часовой стрелке в этот момент, весь бак (барабан) начнет вращаться вместе с вращателем! Сухое вращение !!!).Дренажный клапан также работает от 230 В переменного тока.
Выводы:
Водозаборник работает от 230В переменного тока.
Канализация работает от 230 В переменного тока.
Dry Spin требует, чтобы клапан слива воды был открыт.
Датчики давления / уровня воды
Во время разборки я также обнаружил несколько дополнительных датчиков и предохранительных выключателей. Датчик давления (датчик уровня воды) был поврежден, поэтому мы не используем его для текущего проекта. К предохранительным выключателям относятся дверной выключатель, который используется для остановки работы стиральной машины, если предохранительная дверца открыта, а затем выключатель нерегулярного движения барабана, который в основном представляет собой выключатель, расположенный рядом с баком, и он срабатывает, когда бак ударяет по выключателю из-за какое-то нерегулярное физическое движение.
Датчик давления работает: Внизу бака есть небольшая трубка, которая соединяется с датчиком давления. Когда вода заполняет трубку, давление в трубке повышается по мере того, как воздух выталкивает наружу, что затем перемещает магнит внутри датчика между катушкой, генерирующей небольшую ЭДС и разность сопротивлений, эти данные затем отправляются на плату управления для обработки.
На данный момент мы пропускаем их, так как мое реле давления повреждено, и я не заинтересован в добавлении функций безопасности в прототип модели.
Система управления двигателем и механикой
Электродвигатель большинства стиральных машин двунаправленный. и в моем случае из него выходят три провода, один из которых является общим заземлением, а два других – фазовыми соединениями для каждого направления. Самый простой способ различить три соединения – измерить сопротивление между ними с помощью мультиметра.
Скажем, у нас есть три провода от двигателя: красный, желтый, синий
, если сопротивление между красным и желтым равно 40, синим и желтым – 45, а красным и синим – 90, тогда очевидно, что синий и красный находятся далеко друг от друга, а желтый почти средняя точка, поэтому желтый будет точкой соприкосновения, а другие – фазой направления!Убедитесь, что вы подключаете по одной фазе за раз.
Затем, как я уже упоминал ранее, есть сливное соединение, которое используется для открытия сливного клапана, а также шестерня для подключения барабана для вращения. оба используют одно и то же соединение, и оба будут включены, если мы попытаемся вызвать одно из них. в моей машине цвет соединения для него черный, в то время как он использует общее желтое заземление с двигателем.
Выводы:
У двигателя 3 провода: один – заземление, а два других – фазы для каждого направления.
Слив воды работает как сливной клапан, так и как шестерня, позволяя отжимать без жидкости с использованием бака (барабана).
Панель управления
Очевидно, плата управления контролирует все операции в стиральной машине,
- Заполняет воду путем срабатывания впускного клапана воды.
- Остановите заливку воды, когда давление достигнет определенного значения.
- Вращает ротатор в баке в обоих направлениях с определенными интервалами в течение определенного интервала времени в соответствии с режимами, выбранными пользователем.

- Сливает воду до полного опорожнения бака с помощью переключателя сливного клапана.
- Снова заливает воду для полоскания (как указано выше).
- Наконец, слейте всю воду и начните вращение с барабаном и вращателем для сухого отжима, используя как двигатель, так и переключатель сливного клапана.
Теперь, когда мы знаем основные операции в машине, можно приступить к разработке проекта Arduino для автоматизации процесса.
Следите за обновлениями для полностью автоматической стиральной машины, часть 2 – проект Arduinoозначает, пока проверьте мой репозиторий git для текущего кода.
Контроллер мотора стиральной машины | Доступен полный проект
В стиральных машинах обычно используется однофазный двигатель. В полуавтоматических стиральных машинах чисто механический переключатель управляет синхронизацией и направлением двигателя. Эти переключатели дороги и легко изнашиваются. Здесь представлен контроллер двигателя стиральной машины для однофазных двигателей стиральных машин (рис.1), который эффективно заменяет его механический аналог.
В основном однофазный двигатель требует главного таймера, который определяет время, в течение которого двигатель должен продолжать вращаться (время стирки), и контроллера направления вращения, который останавливает двигатель на 3 секунды через каждые 10 секунд, а затем возобновляет вращение. в обратном направлении.
Схема контроллера мотора стиральной машины
Рис.1: Принципиальная схема контроллера мотора стиральной машины
Направление вращения можно регулировать, как показано на Рис.2. Когда переключатель S1 находится в положении A, катушка L1 двигателя получает ток напрямую, тогда как катушка L2 получает ток со сдвигом фазы из-за конденсатора C. Таким образом, ротор вращается по часовой стрелке (см. Рис. 2 (a)). Когда переключатель S1 находится в положении B, происходит обратное, и ротор вращается против часовой стрелки (см. Рис.2 (б)). Таким образом, переключатель S1 может изменять направление вращения.
Рис.2 (б)). Таким образом, переключатель S1 может изменять направление вращения.
Двигатель не может быть реверсирован мгновенно. Между переключением направления требуется короткая пауза, иначе он может быть поврежден. Для этого используется другой таймер управления направлением вращения (IC2). Это реализовано с помощью IC 555. Этот таймер дает альтернативную продолжительность «включения» и «выключения», равную 10 и 3 секундам соответственно. Таким образом, после каждых 10 секунд работы (по часовой стрелке или против часовой стрелки) двигатель останавливается на короткое время, равное 3 секундам.Значения R3 и R4 рассчитываются соответственно.
Главный таймер реализован на моностабильной микросхеме IC 555 (IC1), и время его включения определяется сопротивлением потенциометра VR с сопротивлением 1 МОм. Резистор на 47 кОм добавлен последовательно, так что даже когда ручка VR находится в положении нулевого сопротивления, общее последовательное сопротивление не равно нулю.
Цикл включения-выключения в главном таймере должен продолжаться только в течение установленного времени (здесь 18 минут). Как только главный таймер сработает, цикл должен остановиться.Для этого выходы обоих таймеров подключены к логическому элементу И-НЕ N1 (IC3), который дает низкий выходной сигнал только тогда, когда оба таймера выдают высокий выходной сигнал. Выходной контакт 3 таймера N1 подключен к реле RL1 через pnp-транзистор T1. , поэтому реле срабатывает только тогда, когда на выходе логического элемента И-НЕ N1 низкий уровень. Поскольку линия сети 220 В проходит через реле RL1, монитор выключается на 3-секундный период отключения по истечении установленного времени в 10 секунд. График представлен на рисунке 3.
Рис.3: Временная диаграмма вращения двигателяВо время включения таймера направления отжима IC2 на выходе триггера JK с отрицательным фронтом на контакте 2 становится низкий уровень, чтобы активировать реле RL2, и двигатель стиральной машины вращается в одном направлении. .Во время выключения IC2 на выходе N1 снова появляется высокий уровень, чтобы обесточить реле RL1, которое отключает питание от сети на RL2, и монитор перестает вращаться.
Неисправность с плавающей точкой может возникнуть на контакте 2 триггера IC1. Резистор R8 решает эту проблему, удерживая штифт 2 высоко.
Заинтересованы? Ознакомьтесь с другими проектами в разделе схемы.
Infineon для производителей | Щиты для Arduino
Универсальные средства разработки, управления освещением и двигателем
С 2015 года Infineon предлагает специальные экраны для Arduino, платформы для создания прототипов электроники с открытым исходным кодом, основанной на гибком, простом в использовании аппаратном и программном обеспечении.
Построенный в соответствии со стандартизированным формфактором Arduino Uno, Infineon Shields для Arduino дает разработчикам возможность быстро и недорого проводить оценку и создание прототипов своих проектов.
Infineon Shields для Arduino выполняет ряд задач в масштабируемой системе, включая экраны для освещения и управления двигателем, а также универсальные комплекты для разработки, которые взаимодействуют с остальными платами и инструментами микроконтроллеров Infineon.
Быстрый переход от концепции к дизайну в широком диапазоне приложений
Infineon Shields для Arduino позволяет быстро перейти от концепции к дизайну в широком спектре приложений.Проверенный и проверенный ассортимент включает экраны для управления двигателем, оценку светодиодного освещения и защищенные переключающие экраны, управляющие резистивными, емкостными и индуктивными нагрузками.
Наряду с полной интеграцией Arduino IDE наш интерфейс Shields for Arduino без проблем работает с большинством стандартных плат и компонентов через подключение plug-and-play.
Благодаря стандартизированному форм-фактору Arduino Uno, расположению выводов и беспаечным разъемам наши экраны обеспечивают штабелируемую и экономичную среду разработки с основными функциями, включая:
Светодиодный экран для светодиодной подсветки RGB с XMC1202 разработан так, чтобы его можно было легко настраивать и комбинировать для различных светодиодных источников света и ламп, для быстрого создания прототипов и недорогой оценки приложений светодиодного освещения.
Новый щит двигателя постоянного тока с TLE94112EL для Arduino питается от 12-кратного полумоста TLE94112EL и способен управлять шестью двигателями параллельно или одиннадцатью двигателями в каскадном режиме. Защитный экран переключателя 12 В с BTS50015-1TAD использует Power PROFET ™ для управления резистивными, емкостными и индуктивными нагрузками в сильноточных приложениях и приложениях с большими циклами переключения и высокими требованиями к энергии.
Управляемая схема управления стиральной машинойс ATmega32
Микроконтроллер ATmega32 на основе проекта уже довольно интересен и профессионал Я вижу этот тип передовых проектов Серия ATMEL Некоторые участки схемы MOC3043 opto diac, MOC3023 изолированы с ЖК-дисплеем и управлением светодиодным индикатором (предположительно… Проекты электроники, Управляемая схема управления стиральной машиной с ATmega32 “проект avr, проекты микроконтроллеров” проекты ATMEL серии
Некоторые участки схемы MOC3043 opto diac, MOC3023 изолированы с управлением ЖК-дисплеем и светодиодным индикатором (предположительно RC5) и имеют намного больше функций
Схема стиральной машины
Скорость вращения двигателя регулируется с помощью микроконтроллер.Его напряжение питания 230 В отключается симистором, управляемым ATmega. Действительно, прямое питание от двигателя 230 В вращает скорость отжима. Следовательно, мытье должно быть медленным. Но управление скоростью становится необходимым, потому что крутящий момент сильно меняется во время каждого оборота барабана распределения и перемещения белья в барабане. Отсюда и наличие тахогенератора вала мотора. ATmega непрерывно измеряет фактическую скорость барабана (по запрограммированной частоте) и сравнивает ее с заданным значением.Результат используется для регулировки угла симистора для поддержания постоянной скорости (регулировка скорости). Это одна из тонкостей программы.
Направление вращения двигателя выбирается переключением соединения статора относительно ротора двумя реле. Насос и клапаны управляются симисторами. Нагреватель управляется реле 230В – 10А.
Цепи микроконтроллера и низкое напряжение (5 В) изолированы от сети 230 В:
питание трансформатора 230 В – 2X6V
симисторы опто-симисторами, обнаруживающими переход через ноль MOC3043.
отключение напряжения симисторного двигателя с помощью опто-симистора NO с обнаружением перехода через ноль MOC3023 (мгновенный отклик)
Все управляется удаленно с помощью пульта дистанционного управления для телевизора! (избегает прикосновений во время работы машины)
Некоторые особенности платы управления;
1) Проверка: управление включением-выключением управления частотой вращения двигателя, управление температурой воды на входе дренажного насоса с помощью 20-значного (синего) ЖК-дисплея. Некоторые светодиоды во всех цветах
2) Входной сигнал: счетчик числа оборотов с резистивным датчиком температуры фазы опорного сигнала 50 Гц сектора.Кнопки, кнопки, ИК-приемник пульта ДУ
Источник: http://silicium628.chez-alice.fr/electron/lavelinge/lavelinge.html
СПИСОК ССЫЛОК ДЛЯ ЗАГРУЗКИ ФАЙЛОВ (в формате TXT): LINKS-11326.zip
Ремень управления двигателем
Ремень управления двигателем
3 простых способа починить беговую дорожку (с изображениями) – wikiHow
15 августа 2019 г. · Вероятно, проблема в переключателе / цепи управления скоростью двигателя. Если на вашей беговой дорожке есть ручка управления скоростью, которую вы поворачиваете, обычно это простая замена переключателя и ручки потенциометра, и ее довольно легко заменить – просто убедитесь, что она у вас есть.
Как работает двигатель управления скоростью на конвейерной ленте …
14 апреля 2017 г. · Существует два распространенных способа управления скоростью конвейера. 1. Стандартный двигатель переменного тока подключен к частотно-регулируемому приводу. Привод регулирует частоту, и двигатель реагирует соответствующим образом, вращаясь с разными скоростями. 2. Серводвигатель подключается …
Узнать цену
Все размеры клиновых ремней на складе. State Motor & Control …
Большой запас и экспертное обслуживание для всех стилей и размеров клиновых ремней.Быстрый ответ и доставка в тот же день. Звоните 866-354-0063 – Интернет-каталог клиноременных приводов
Получить цену
Регулировка скорости ленточно-шлифовального станка – Шлифовальные машины, шлифовальные машины и т. Д. – I …
14 августа 2016 г. · Это подает полное напряжение / ток на двигатель в короткие импульсы. Чем короче импульс, тем медленнее работает двигатель, чем шире импульс, тем быстрее он идет. На схеме ниже показано, как выглядит ШИМ. Относительно скорости ленты для расчетов оборотов. Выполните поиск в Google по запросу “belt sfpm”. Это обеспечит вам часы занимательного чтения.
[PDF]Получить цену
Используйте приводной двигатель постоянного тока беговой дорожки и ШИМ-контроллер …
Используйте приводной двигатель постоянного тока беговой дорожки и ШИМ-контроллер скорости для электроинструментов: электроинструменты, такие как металлорежущие станки и токарные станки, сверлильные станки, Для ленточных пил, шлифовальных машин и прочего могут потребоваться двигатели мощностью от 0,5 до 2 л.с. с возможностью точной настройки скорости при сохранении крутящего момента. По совпадению, в большинстве беговых дорожек используется двигатель 80-260 В постоянного тока с …
Получить цену
Шкив и шкивы для электродвигателей – Электрический двигатель …
Купить шкив и шкив электродвигателей по сниженным ценам. Большой выбор, низкие цены.
Получить цену
(PDF) ШИМ-управление двигателем постоянного тока, используемым для привода конвейерной ленты
Реализовано ШИМ-управление двигателем постоянного тока с помощью Arduino. Приложение используется для привода конвейерной ленты [9]. В своей исследовательской работе Саламоне и др. Предлагают систему управления для принудительной циркуляции …
Получить цену
Учебное пособие по управлению шаговым двигателем Arduino с кодом и …
15 августа 2017 г. · Схема управления шаговым двигателем Arduino и Пояснение: Принципиальная схема для проекта управления шаговым двигателем Arduino показана выше.Мы использовали шаговый двигатель 28BYJ-48 и модуль драйвера ULN2003. Для подачи питания на четыре катушки шагового двигателя мы используем цифровые выводы 8, 9, 10 и 11.
Узнать цену
Регулируемые приводы для систем ленточных конвейеров – ABB Ltd
Приводы с регулируемой скоростью для систем ленточных конвейеров , Ноябрь 2000 5 ABB Process Industries – Открытые горные работы и транспортировка материалов, Котбус / Германия Все используемые преобразователи частоты ABB основаны на силовых полупроводниках IGBT и характеризуются, в частности, современной концепцией управления, называемой прямым управлением крутящим моментом (DTC®) .
Получить цену
Использование шкивов с электродвигателями | process.arts
Шкивы обычно используются, если двигатель собирается вращаться с высокой скоростью, но не всегда, как я видел их в тяжелых двигателях с зеркальным шаром. Привод передается на другой шкив с помощью клинового ремня (и шкив, и клиновой ремень показаны на изображении выше). Этот тип шкива (с канавками) называется «ступенчатым шкивом».
Получить цену
Учебное пособие по управлению шаговым двигателем Arduino с кодом и…
15 августа, 2017 · Схема управления шаговым двигателем Arduino и пояснение: Принципиальная схема для проекта управления шаговым двигателем Arduino показана выше. Мы использовали шаговый двигатель 28BYJ-48 и модуль драйвера ULN2003. Для подачи питания на четыре катушки шагового двигателя мы используем цифровые выводы 8, 9, 10 и 11.
Получить цену
Какие типы двигателей используются для конвейерной ленты? – Quora
24 февраля 2018 г. · Спасибо за A2A .. Конвейерная лента используется на электростанциях, а также на любой сборочной линии.Лента конвейера приводит в движение огромную нагрузку, поэтому двигателю требуется очень высокий пусковой крутящий момент, превышающий его рабочий крутящий момент. Фактически двигатель серии DC …
Получить цену
Amazon: Двигатели беговой дорожки – Детали тренажеров …
Proform Crosswalk 325X Плата управления двигателем Модель № 293230 Sears Модель 831293230 Деталь № 137860 … StarTrac Pro Tread 7600 Pro AC Беговая дорожка с двигателем. пользователя Star Trac. 106.96 $ 106 96. Больше вариантов покупки. $ 99.98 (2 новых предложения) БЕСПЛАТНО.
Получить цену
МОДУЛЬНАЯ И ПОРТАТИВНАЯ КОНВЕЙЕРНАЯ ЛЕНТА.УПРАВЛЕНИЕ СКОРОСТЬЮ.
МОДУЛЬНАЯ И ПОРТАТИВНАЯ КОНВЕЙЕРНАЯ ЛЕНТА. УПРАВЛЕНИЕ СКОРОСТЬЮ ОТ ARDUINO: МОДУЛЬНАЯ ПОРТАТИВНАЯ КОНВЕЙЕРНАЯ ЛЕНТА Идея этого проекта заключается в создании миниатюрной копии промышленного процесса, в данном конкретном случае конвейерной ленты, для использования в учебных средах для обучения промышленной автоматизации с использованием ПЛК, Arduino …
[PDF]Получить цену
Инструмент для определения размеров ленточного конвейера
Формы для выбора двигателя конвейера рассчитывают необходимый крутящий момент, скорость, точность остановки и инерцию системы, которые важны при выборе двигателя, подходящего для данной области применения…. Oriental Motor предлагает широкий спектр продуктов для управления движением для широкого диапазона приложений, выберите подходящий тип приложения ниже. … Инструменты для определения размеров двигателя> Ремень …
Получить цену
Зубчатые ремни, приводные ремни, клиновые ремни и многое другое – AutoZone
Иногда водяной насос приводится в движение ремнем или цепью ГРМ – Ремни компрессора переменного тока: Эти Включите компрессоры кондиционера, чтобы в салоне было прохладно. Что такое змеиный пояс? Змеевиковые ремни объединяют все это в одно, и они длинные, поэтому они могут обертываться вокруг всех компонентов и промежуточных шкивов.
Получить цену
Ремни безопасности | Безопасность автотранспортных средств | Центр травм CDC
Автомобильные аварии – основная причина смерти среди людей в возрасте от 1 до 54 лет в США. Для взрослых и детей старшего возраста (которые достаточно велики, чтобы пристегнуться ремнями безопасности), использование ремней безопасности является одним из самых эффективных. способы спасти жизни и уменьшить травматизм при авариях. Тем не менее, миллионы не пристегиваются к каждому …
Узнать цену
Ремень против вентиляторов с прямым приводом – Thermotek – Home
Ремень против вентиляторов с прямым приводом.Вентиляторы всех типов традиционно приводились в движение ремнями. … вентиляторы с ременным приводом имеют недостаток в том, что они требуют большего обслуживания. Затяжка ремня, осмотр и возможная замена неизбежны при использовании вентиляторов с ременным приводом. … с трехфазным двигателем. И ECM, и частотно-регулируемый привод …
Get Price
Ремни безопасности | Безопасность автотранспортных средств | Центр травм CDC
Автомобильные аварии – основная причина смерти среди людей в возрасте от 1 до 54 лет в США. Для взрослых и детей старшего возраста (которые достаточно велики, чтобы пристегнуться ремнями безопасности), использование ремней безопасности является одним из самых эффективных. способы спасти жизни и уменьшить травматизм при авариях.Тем не менее, миллионы не пристегиваются к каждому …
Узнать цену
Платы управления двигателем беговой дорожки
Это замена платы управления двигателем MC-60 для беговой дорожки Proform 730. Исключительная гарантия 1 год! Номер модели Только PFTL17040, PFTL17041, PFTL17042, PFTL17042, PFTL17043, PFTL17044. Совет по обслуживанию: Причина №1 отказа платы управления двигателем – отсутствие смазки движущегося ремня. Попробуйте нашу всемирно известную смазку для беговых дорожек. Нет …
Получить цену
Используйте приводной двигатель постоянного тока беговой дорожки и ШИМ-регулятор скорости…
Используйте приводной двигатель постоянного тока беговой дорожки и ШИМ-контроллер скорости для приводных инструментов: для электроинструментов, таких как металлорежущие станки и токарные станки, сверлильные станки, ленточные пилы, шлифовальные машины и т. Д., Могут потребоваться двигатели от 5 до 2 л.с. с возможностью точной настройки По совпадению, большинство беговых дорожек используют двигатель 80-260 В постоянного тока с …
Получить цену
Цепи пускателя двигателя и устройства изоляции энергии …
В этом случае мы предполагаем, что схема автоматического управления в двигателе сбои в работе центра управления, в результате чего открывается только одна фаза из трехфазного источника двигателя (нередкое явление, особенно когда устройство защиты от перегрузки по току размыкает третью фазу (L3), не нарушая цепь пускателя двигателя).
Получить цену
Как управлять двигателем постоянного тока с помощью Arduino
Двигатель постоянного или постоянного тока является наиболее распространенным типом двигателя. Двигатели постоянного тока обычно имеют всего два вывода, один положительный и один отрицательный. Если вы подключите эти два провода напрямую к батарее, двигатель будет вращаться. Если поменять местами провода, двигатель будет вращаться в обратном направлении. Чтобы контролировать …
Получить цену
Каковы лучшие способы управления скоростью двигателя постоянного тока?
Таким образом, двигатель постоянного тока имеет особую характеристику регулирования своего крутящего момента в случае изменения нагрузки из-за обратной ЭДС.Не пропустите: преимущества и применение бесщеточного двигателя постоянного тока. Принцип управления скоростью. Из приведенного выше рисунка уравнение напряжения простого двигателя постоянного тока: V = Eb + IaRa
Get Price
Ремень (механический) – Wikipedia
History. Механический ременной привод, использующий шкив, впервые был упомянут в тексте «Словаря местных выражений» философом, поэтом и политиком династии Хань Ян Сюн (53–18 гг. До н.э.) в 15 г. до н.э. шелковые волокна на бобины для челноков ткачей.Ременный привод является важным элементом изобретения прялки.
Получить цену
Как двигатель управления скоростью работает на конвейерной ленте …
14 апреля 2017 г. · Существует два распространенных способа управления скоростью конвейера. 1. Стандартный двигатель переменного тока подключен к частотно-регулируемому приводу. Привод регулирует частоту, и двигатель реагирует соответствующим образом, вращаясь с разными скоростями. 2. Серводвигатель подключается …
Узнать цену
Вентиляторы с ременным приводом – Двигатель и скорость вентилятора – Engineering ToolBox
Вентиляторы с ременным приводом используются в системах отопления, вентиляции, кондиционирования и охлаждения (HVAC).Скорость вращения крыльчатки вентилятора в зависимости от скорости двигателя с ременной передачей можно рассчитать как. d f n f = d m n m (1) где. d f = диаметр шкива вентилятора (дюйм, мм) n f = скорость вентилятора (об / мин – количество оборотов в минуту) d m = диаметр шкива двигателя (дюйм, мм)
Получить цену
МОДУЛЬНЫЙ И ПОРТАТИВНЫЙ КОНВЕЙЕРНЫЙ РЕМЕНЬ. УПРАВЛЕНИЕ СКОРОСТЬЮ.
МОДУЛЬНАЯ И ПОРТАТИВНАЯ КОНВЕЙЕРНАЯ ЛЕНТА. УПРАВЛЕНИЕ СКОРОСТЬЮ ОТ ARDUINO: МОДУЛЬНАЯ ПОРТАТИВНАЯ КОНВЕЙЕРНАЯ ЛЕНТА Идея этого проекта заключается в создании миниатюрной копии промышленного процесса, в данном конкретном случае конвейерной ленты, для использования в учебных средах для обучения промышленной автоматизации с использованием ПЛК, Arduino…
Получить цену
Amazon: Двигатель с регулируемой скоростью
Двигатель Dayton 3K771, 1/4 л.с., 60 Гц, ремень. 4.4 из 5 звезд 24. 87,84 $ 87,84 $ 114,99 $ 114,99. БЕСПЛАТНАЯ доставка … 26 августа. БЕСПЛАТНАЯ доставка заказов на сумму более 25 долларов, отправленных Amazon. uniquegoods DC 10-60V Водонепроницаемая оболочка Управление скоростью двигателя постоянного тока PWM Драйвер HHO Контроллер RC Регулятор скорости Бесступенчатые регулируемые поворотные переключатели 12 В 24 В 36 В 48 В Ширина импульса …
Получить цену
Устранение неполадок контроллера двигателя беговой дорожки | Все о …
22 июня 2014 г. · Я был бы счастлив, если бы двигатель полотна беговой дорожки снова заработал. Меня не беспокоит правильная работа функции наклона. Подробности: вот некоторые подробности о контроллере мотора и проведенных мною тестах. Я приложил фото платы управления для справки -.
Получить цену
Линейный привод arduino tutorial
Это набор руководств, созданных мной или моими учениками. Они часто полагаются на изученные другие концепции.Если вы новичок в Arduino, возможно, вы захотите следовать по курсу, указанному слева.
Продам Ford fusion sport 2017
Champion Емкость генераторного масла 9000 Вт
Передовая технология приводов для самых экстремальных условий. Компания 2G Engineering уделяет особое внимание высокопроизводительным, прочным и водонепроницаемым приводам, способным выдерживать высокие давления и превосходить традиционные приводы в различных уникальных и сложных областях применения.
Corvette pinstripes
Объекты групповой политики Active Directory должны быть настроены с соответствующими настройками аудита
Клапан абсорбера Wabco 4721950330
Шифрование данных в состоянии покоя и при передаче aws
Как восстановить заводские настройки iphone 8 plus без пароля
Пример использования загрязнение воздуха в Индии
Youtube Music Premium Free
Почему такой размер был наиболее эффективным для максимального распространения_
Пользовательская прошивка Netgear stora
Игрушечные пудели для продажи в chattanooga tn
Калькулятор среднего сплит-эрг
Столовый сервиз с листом
Доска объявлений Coonhound
Образец запроса на рекомендательное письмо от профессора
Diatone mamba f411 nano stack
Список кодов Mmi iphone
Скачать мультфильм на и на
Best high growth etf reddit
Рабочие листы с линейными уравнениями
pdfДве параллельные линии, пересеченные трапецией nsversal notes
Steam показывает только установленные игры
Лазерный проектор Xiaomi mi 4k ust
Урок 4, домашнее задание, область и периметр аналогичных фигур
Как душа узнает, когда покинуть тело
Производители скребков для ящиков
Заказ положительных и отрицательных десятичных знаков рабочего листа tes
Subnautica lava geyser safe shallows
Как представить результаты качественного исследования в powerpoint
2018 Chevy Equinox шторные зажимы для люка
Nys parole Officer
Ответы на листы маркировки мышечной системы Идеально конкурентоспособные ответы
Структура рынка включает в себя все следующее, кроме
Интерактивная программа математики ответы на домашнее задание
Fnaf 2 google drive
Bakugou x reader поет
Флеш-игры разблокированы в школе
Плесень для помадки Gucci
Строитель жалуется на сильную боль
90 004 Погремушка печи Suburban rvСброс пароля Xmarto
Проблемы с датчиком скорости 4l80e
Бесплатная загрузка антивируса Avast для windows xp в автономном режиме
Как удалить воздух из радиатора ауры сатурна 2007
Настройки электронной почты Earthlink android
Семья прокурора штата Аризона отдел защиты
Bmw f10 dpf delete
Он сказал, что видит кого-то
Двигатель шнека льдогенератора не вращается
Почтовый индекс выставления счетов для международных кредитных карт
Buderus gb142 код ошибки h7
Freightliner cascadia
для продажи в КалифорнииCounty of Mercer Трентон, штат Нью-Джерси
Пример определенной границы
Детали дробовика Browning
Щенки ротвейлера на продажу в NC Craigslist
Как получить автоприцел на ПК Fortnite
Найдите площадь самого большого прямоугольника, которую можно вписать в прямоугольный треугольник
Приложение Geogebra
Линейное Электропривод LA50P 1500N 100мм / с 12В с потенциометром – ход 30см.Линейный привод с max wysuwie 30 см, защищенный двумя автоматическими выключателями. Максимальная нагрузка устройства 150 кг (1500 Н). Из-за высокой степени герметичности …
Двигатель ford f100 390 1974
Срок службы ассоциации безопасности Crypto ipsec в килобайтах 4608000
Сезон охоты на лис Вирджиния
Языковые методы и их влияние gcse pdf
Speeco cat 2 быстросъемные размеры
Emmc storage
ПриводыEasyE ® – это высокоэффективные линейные электрические линейные приводы с тонким профилем и грузоподъемностью до 2200 Н.EasyE ® идеален там, где ваше приложение ограничено пространством.
Kikker 5150 на продажу ebay
Электронно-точечная диаграмма фторида натрия
14 февраля 2016 · Для этого проекта вам понадобится: Arduino uno. Макетная плата. Модуль L298. 2 двигателя постоянного тока. Шаг 2: Схема. Подключения довольно просты! Модуль 5V (или Vcc) – вывод Arduino 5V. Модуль GND – вывод GND Arduino. Модуль 12В (или Вбат) – к внешнему источнику питания до 35В. Для этого учебного пособия просто …
Как футбол может помочь нам понять физику Ключ к прочитанным работам
Таблица выбора диапазона реле перегрузки Schneider
Глава 15 Краткое содержание бхагавад-гиты
Материнская плата серии Amd FX
Concord 90 plus высокоэффективная пилотная лампа
Детали цифрового пианино Baldwin
Наша новая линейка микролинейных и гусеничных приводов представлена в широком диапазоне хода, силы и скорости.От самых маленьких робототехнических приложений до домашней автоматизации или сложной художественной конструкции – у нас есть электрические линейные варианты, которые помогут вам реализовать любое миниатюрное движение, которое вы можете вообразить.
Если вы дадите мыши вопросы для обсуждения
Радиозонд Lms6
Тестовый тест Rma
Как чистить поддон для капель в диспенсере для воды primo
Советы и рекомендации для Apple Watch, серия 5
Ручка зубной щетки Philips sonicare diamondclean
What макромолекула выполняет суданский тест для
Идентификационная карта совхоза онлайн
Mapbox перемещает слой наверх
Прекращены ли ванны и кузовные работы, воск тает
Декабрь 2020 астрологические прогнозы
Как настроить двигатель tpi
Spring boot microservices ecommerce github
Центр венчурного хищника Томпсона
Индекс бруклинской девяти девяти сезона 3
Lewdbot Discord Command
Поиск идентификационного номера Калифорния
Автомобильная авария в Арлингтоне, штат Вирджиния, вчера
Storm secret topaz ring
2006 c buick rendez exfat
Samsung s10 выиграл процент27t обновление
Стоимость вакцины против гепатита В walmart
Рабочий лист практического осмоса pdf
Комплект стоп-сигналов и указателей поворота для мини-велосипеда
Продается переделанный автобус
Набор Pink Pyrex Gooseberry
Вариационный автоэнкодер для обнаружения аномалий
000 Мастер реакции на обнаружение аномалий000 pytorchSattamaka143
Запасные части для штормовой двери Андерсена
Планшет Asus nexus frp bypass
25 сентября 2016 г. · История сервомотора полностью отличается от истории двигателя постоянного тока.Серводвигатель – это тип привода, который обеспечивает высокоточное управление линейным или угловым положением. Типичный серводвигатель состоит из четырех частей (или частей): двигателя постоянного тока (или двигателя переменного тока), редуктора, устройства измерения положения и скорости и блока управления.
Dj mwanga zuchu na damondi audio
Линейные приводы и другие продукты для роботов. В RobotShop вы найдете все о робототехнике. … плата, совместимая с 2IO Arduino и плата регулятора 5V, 2A …
Marantz arc setup
En tu ausencia uncut sheet
Lq4-диаграмма вакуума
Virtualbox pcie passthrough
Rescue me himalayan
Taurus g3 Обзор пистолета Люгера
Прогноз запасовGm на 2025 год
Диапазон Arduino варьируется от более крупного Arduino Mega до Arduino Uno среднего размера и меньшего Arduino Pro Mini.Платы разного размера будут обеспечивать все большее количество контактов ввода / вывода и дополнительных функций, и самой популярной из этих плат является Uno. Зачем использовать Arduino для управления линейным приводом?
Финансовая модель накопителя энергии (excel)
Как мирно расторгнуть брак
Отзывы фермеров о страховании жилья
Xbox one restore cloud save
Полиэтиленовые ботинки снегоуборочной машины
Нарисуйте прямоугольник opencv python
Обои с флагом повстанцев для мобильного телефона
Пример принципа конкурентного исключения
Mimpi melihat banyak mayat togel
Python повернуть изображение на 90 градусов по часовой стрелке
Bienville parish assor
Telegram lucah melayu
2021 Dodge Challenger Super Stock Colors
Seagate Drupal 8
Xnxx gudang bokep asli indonesia
Aero precision 50 beowulf
Contentful Rich Text android
Razer deathadder замена цветности ноги
Remington
для Remington
попугай
90 004 Кто написал большинство песен GenesisБеспроводная камера слежения с приложением для iphone
Ремонт треснувшего корпуса турбокомпрессора
Нагпур матка
Линейный привод, необходимый для подъема и опускания колеса для проверки сцепления на взлетно-посадочной полосе.Полный комплекс услуг, специально подобранный для вас. Свяжитесь с нашей командой, чтобы узнать, как мы можем удовлетворить ваши требования, обсудить наши различные продукты и как мы можем удовлетворить ваши потребности в электрическом линейном приводе.
Редактировать страницу оформления заказа squarespace
Botox fresno
Комплект кондиционирования воздуха с бортовым поворотом
Фрэнк Хамер причина смерти
Craigslist fresno cars
Хьюстонская полицейская машина погоня сегодня
Бесплатные события по уничтожению бумаги в ct 2020
ktСреди нас вентиляционный звуковой эффект скачать
Как переиграть нарцисса
Roseville mn Продажа домов с бассейном
Как взломать кнопочный замок
Одометр Arduino
28 марта 2017 · Это спутниковая навигация- основанная на системе система, которая, будучи однажды установленной в транспортных средствах, дает водителю аудиовизуальное предупреждение перед неизбежным столкновением.Система работает путем создания зоны безопасности вокруг каждого транспортного средства и с помощью алгоритма, если обнаруживается перекрытие двух или более зон безопасности, водители предупреждаются о надвигающейся аварии.Сброс кода открывания двери гаража над головой
- Китай Акции | Купите Meilan M4 Bike Computer Wireless Speedometer Odometer 2.5 Inch IML Mirror Surface Screen – черный в Интернете по бесконкурентным ценам. Бесплатная доставка. Ограниченная по времени продажа. Местные склады.
- Марсианская научная лаборатория имеет шесть колес, каждое из которых оснащено собственным двигателем.Два передних и два задних колеса также имеют индивидуальные двигатели рулевого управления (по одному на каждое). Эта способность рулевого управления позволяет автомобилю поворачиваться на месте на полные 360 градусов. Четырехколесное рулевое управление также позволяет марсоходу отклоняться …
kingneed Оригинальный универсальный GPS-дисплей на лобовом стекле Спидометр Одометр Автомобильный цифровой дисплей скорости Сигнализация превышения скорости в милях в час Автомобильные часы для всех транспортных средств C60 / C60S / C80 / C90 (C60S) 4.2 из 5 звезд 312 $ 25,99 $ 25. 99
Доступно 2777 принципиальных схем.Последняя схема была добавлена в четверг, 28 ноября 2019 г. Обратите внимание, что некоторые блокировщики рекламы подавляют схемы и рекламу, поэтому отключите их, если список схем пуст.
Определение и использование. Тег
Плата позволяла легко подключаться к Arduino и включала фиксирующие диоды для предотвращения повреждения Arduino обратной ЭДС.Поскольку плата была слишком большой для моих нужд, я переделал ее для использования диодов для поверхностного монтажа (LL4148) и уменьшил размер платы, чтобы он соответствовал диаметру двигателя Switec.
21 июля 2017 г. · Я пытаюсь преобразовать одометр в цифровой. Я предполагаю, что чип находится в ECM, так что это, вероятно, тоже не годится, направление всегда вперед, это 6-проводный шаговый двигатель, поэтому 2 катушки и центральные ответвители.
Женщина найдена мертвой londonderry nh
Пока шум вашего датчика смоделирован надлежащим образом и показания одометра могут быть преобразованы в изменения положения, общий алгоритм остается в силе.В практическом смысле, с очень высокой степенью неопределенности от одометрии, он будет обновлять положение просто отлично, но будет казаться, что он игнорирует одометр, когда доступна какая-либо другая информация (например, лазер и …
Есть библиотеки Arduino, написанные для общения к мыши и получить направление расстояния вращения колес энкодера. Подключив колесо энкодера к ролику с нитью, мы можем отслеживать фактическое использование нити для каждого проекта с помощью Arduino и отображать результаты в миллиметрах на ЖК-дисплей.
Стр. 126: Спидометр и одометр Спидометр и одометр Одометры поездки С помощью одометров можно узнать, как далеко проехал ваш автомобиль. Спидометр позволяет вам видеть вашу скорость в обеих милях, пройденных с момента последней установки счетчика пробега на ноль. в час (миль / ч) и километров в час (км / ч).
P-коды или бортовые диагностические идентификаторы PID-II «ID параметров» – это коды, используемые для запроса данных от транспортного средства, используемых в качестве диагностического инструмента. Эти коды являются частью стандарта SAE J / 1979, который должен применяться во всех автомобилях, продаваемых в Северной Америке с 1996 года.
«в памяти» определяется в отличие от подхода Hadoop к обработке данных на основе файлов. В Hadoop, если мы хотим выполнить задачу, которая включает в себя более одного цикла mapreduce, результат каждого mapreduce сохраняется на дисках перед запуском следующего mapreduce …
26 августа 2020 г. · Это проблема для микроконтроллера, такого как Arduino использует, поскольку они могут генерировать импульс только от 0 до 5 вольт. Я решил эту проблему, используя микросхему драйвера RS232, чтобы переключить положительное напряжение на отрицательный выход.Ожидается сигнал VSS спидометра. Показана скорость 60 миль в час. Arduino Uno передает сигнал широтно-импульсной модуляции 0-5 В через микросхему MAX232N. Подключите контакт 4 Arduino к контакту TX модуля GPS. ВНИМАНИЕ: Большинство модулей GPS могут работать от 5 В, но используемый здесь U-BLOX Neo 6M может поддерживать только максимальное напряжение 3,6 В. Если вы внимательно посмотрите на плату GPS, вы увидите крошечный регулятор напряжения 3.3V серии K833.
Для запуска кода вам необходимо установить следующие библиотеки в папку библиотеки Arduino.U8glib – Для OLED-дисплея. TinyGps ++ – Для GPS. Код «печатает» скорость, курс, количество спутников, широту и долготу. Но можно отобразить гораздо больше информации, например: время, дату, расстояние до точки …
Я просто вставил провод в разъем на Arduino, а затем поместил ЖК-экран поверх него. Здесь вы можете увидеть провода герконового переключателя, вставленные в разъемы на Arduino: Как я подключил герконовый переключатель к Arduino. Шаг 8: Установите синий / белый ЖК-экран Adafruit 772 16 × 2 на верхнюю часть Arduino.
Учетная запись Zelle приостановлена
Структура управления целевым магазином
Датчик скорости автоматической трансмиссии – это устройство обнаружения, которое измеряет скорость колеса или ведущей оси и отправляет информацию в виде аналогового сигнала напряжения в систему управления двигателем Единица.
Обеспечивает бесконтактное обнаружение вращающихся черных металлов (воздействующих на магнитное поле), таких как шестерня, вал или аналогичный механизм. Honeywell предлагает электронные датчики скорости и положения, обеспечивающие повышенную надежность и увеличенный срок службы.
См. Полный список на electronicsforu.com
В этом руководстве показано, как использовать GPS-модуль NEO-6M с Arduino для получения данных GPS. GPS расшифровывается как Global Positioning System и может использоваться для определения местоположения, времени и скорости, если вы путешествуете. Мы покажем вам, как подключить модуль GPS к Arduino и как написать код для получения координат GPS.
Battle royale
Оптический одометр мыши для (Arduino) робота: точное определение прогресса колесного робота может быть довольно сложным (и дорогостоящим!).Точный расчет предполагает, что наши двигатели идеально согласованы, наши колеса не скользят, а поверхность, по которой мы бежим, идеально плоская: большинство из этих условных…
Arduino вычисляет миль в час и отправляет эту информацию на ЖК-экран. руль во время езды. Он совместим с любым типом велосипеда / колеса, просто введите радиус колеса в прошивку, чтобы откалибровать устройство для вашей настройки.
Идеи центральной части обеденного столаMobilespec bluetooth наушники руководство
Polaris slingshot roofКонтрольный список ввода в эксплуатацию для насосов
Структура комиссионных сборов Comsats lahore для аптеки d
Qualtrics выпадающий список в формеBemidji 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907 907
Трюфели Qubit
База данных о зарплатах сотрудников штата Вашингтон за 2019 год
День выплаты жалованья за сборку лучшего скрытого оружия 2
12b длина армейского айта
Bmw e39 Bulb chart
Conjugate base of hpo42
Как отрегулировать развал на грузовике Chevy
Ztw shark esc
John deere 410 Технические характеристики фронтального погрузчика
Ruger american rimfire нержавеющая точность
Модифицированное заикание minecraft
Примеры биотических факторов
Bmw e60 2ad0
Вождение с плохим vvt
Angka main jitu 2d sgp hari ini
Sauer Drilling Chevy Tahoe 2015 мигает внутреннее освещение
| Talon srx python Самый распространенный рабочий лист изотопов 1 ключ ответа | Урок 10 практические навыки косвенного измерения | D Полицейские под прикрытием на рейвах | Мини-йоркширский австралиец на продажу Типы Jmespath |
| OBD | Подлинный сканер ELM327 будет считывать диагностический USB , OBD2, данные EOBD.Используя прошивку электроники ELM, это лучший диагностический инструмент №1 на рынке, кабель датчика одометра, цифровой для мотоцикла, спидометр, прочный, полезный. Особенности: * 100% абсолютно новый и качественный * Изготовлен из высококачественного материала, прочный и практичный в использовании * Простота установки * Поставляется с 2 магнитами * Кабель датчика одометра. Технические характеристики: * Длина кабеля: 1,5 м / 59 дюймов (прибл.) * Длина металлического разъема: 40 мм / 1,57 дюйма (примерно … | ||
| Большие черные пауки в Южной Корее Dexta daps pics | Apache существующее соединение был принудительно закрыт удаленным хостом | Частоты Iff 3 | Платные приложения в магазине Galaxy бесплатно |
| Марсоход с питанием от Arduino использует два двигателя для инвалидных колясок, чтобы перемещать его по пляжу, а также грабли, чтобы оставить отметку о том, где это было.Навигация обеспечивается приемником GNSS (более общий термин для «GPS»), цифровым компасом и одометром, установленным на каждом из двигателей. Информация передается между компьютером и Arduino, по сути, путем установки высокого или низкого уровня вывода. Так же, как мы использовали эту технику для включения и выключения светодиода, мы также можем отправлять данные. Одна сторона устанавливает булавку, а другая читает ее. Это немного похоже на азбуку Морзе, где вы можете использовать ditsand dahst для отправки сообщений по телеграмме. | |||
| Krnl key link Сегодня перекрыты дороги в Майами-Бич | Чехлы для телефонов Tracfone с откидной крышкой | Рабочий лист анализа диалога Сколько слогов на самом деле | C1d2 Требования к помещению |
Канат айтбаев | Раздулся аккумулятор телефона 6 | Викторина с палочкой Поттермора | |
| Правила уголовного судопроизводства 907 4-хбуквенные слова, начинающиеся с z | Снегопад Йосемити 2020 Миссии джайлы командования флотом Звездного пути | Размеры носового переднего аквариума 55 галлонов | |
Таким образом, знание функции одометра для каждой ячейки может дать окончательную кучу песка .Больше новостей | |||