
Устройство и принцип работы электродвигателя
Электродвигатель – это электротехническое устройство для преобразования электрической энергии в механическую. Сегодня повсеместно применяются электромоторы в промышленности для привода различных станков и механизмов. В домашнем хозяйстве они установлены в стиральной машине, холодильнике, соковыжималке, кухонном комбайне, вентиляторах, электробритвах и т. п. Электродвигатели приводят в движение, подключенные к ней устройства и механизмы.
В этой статье Я расскажу о самых распространенных видах и принципах работы электрических двигателей переменного тока, широко используемых в гараже, в домашнем хозяйстве или мастерской.
Содержание статьи
Как работает электродвигатель
Двигатель работает на основе эффекта, обнаруженного Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита может возникнуть непрерывное вращение.
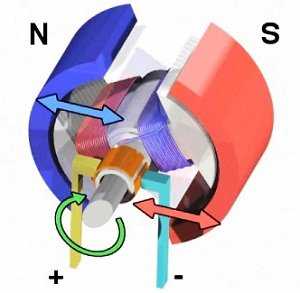
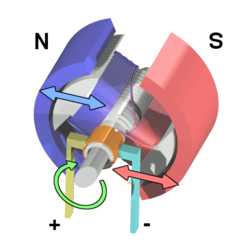
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться.
В результате рамка повернется в горизонтальное положения, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент.
На рисунке это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
В быту же постоянные магниты используются в детских игрушках на батарейках.
В других же более мощных двигателях используются только электромагниты или обмотки. Вращающаяся часть с ними называется ротор, а неподвижная- статор.
Виды электродвигателей
Сегодня существуют довольно много электродвигателей разных конструкций и типов. Их можно разделить по типу электропитания:
- Переменного тока, работающие напрямую от электросети.
- Постоянного тока, которые работают от батареек, АКБ, блоков питания или других источников постоянного тока.
По принципу работы:
- Синхронные, в которых есть обмотки на роторе и щеточный механизм для подачи на них электрического тока.
- Асинхронные, самый простой и распространенный вид мотора. В них нет щеток и обмоток на роторе.
Синхронный мотор вращается синхронно с магнитным полем, которое его вращает, а у асинхронного ротор вращается медленнее вращающегося магнитного поля в статоре .
Принцип работы и устройство асинхронного электродвигателя
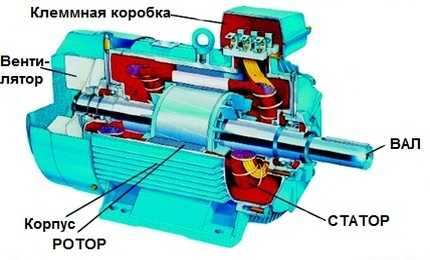
В корпусе асинхронного двигателя укладываются обмотки статора (для 380 Вольт их будет 3), которые создают вращающееся магнитное поле. Концы их для подключения выводятся на специальную клеммную колодку. Охлаждаются обмотки, благодаря вентилятору, установленному на вале в торце электродвигателя.
Ротор, являющиеся одним целым с валом, изготавливается из металлических стержней, которые замыкаются между собой с обоих сторон, поэтому он и называется короткозамкнутым.
Благодаря такой конструкции отпадает необходимость в частом периодическом обслуживании и замене токоподающих щеток, многократно увеличивается надежность, долговечность и безотказность.
Как правило, основной причиной поломки асинхронного мотора является износ подшипников, в которых вращается вал.
Принцип работы. Для того что бы работал асинхронный двигатель необходимо, что бы ротор вращался медленнее электромагнитного поля статора, в результате чего наводится ЭДС (возникает электроток) в роторе. Здесь важное условие, если бы ротор вращался с такой же скоростью как и магнитное поле, то в нем по закону электромагнитной индукции не наводилось бы ЭДС и, следовательно не было бы вращения. Но в реальности, из-за трения подшипников или нагрузки на вал, ротор всегда будет вращаться медленнее.
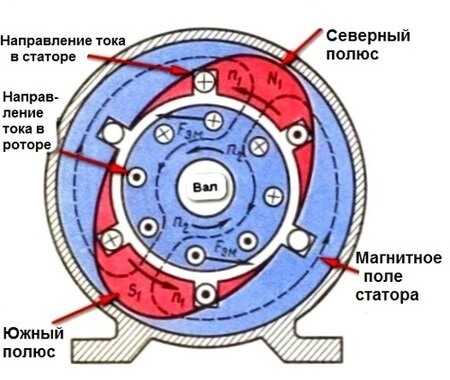
Магнитные полюса постоянно вращаются в обмотках мотора, и постоянно меняется направление тока в роторе. В один момент времени, например направление токов в обмотках статора и ротора изображено схематично в виде крестиков (ток течет от нас) и точек (ток на нас). Вращающееся магнитное поле изображено изображено пунктиром.
Например, как работает циркулярная пила. Наибольшие обороты у нее без нагрузки. Но как только мы начинаем резать доску, скорость вращения уменьшается и одновременно с этим ротор начинает медленнее вращаться относительно электромагнитного поля и в нем по законам электротехники начинает наводится еще большей величины ЭДС. Вырастает потребляемый ток мотором и он начинает работать на полной мощности. Если же нагрузка на вал будет столь велика, что его застопорит, то может возникнуть повреждение короткозамкнутого ротора из-за максимальной величины наводимой в нем ЭДС. Вот почему важно подбирать двигатель, подходящей мощности. Если же взять большей, то неоправданными будут энергозатраты.
Скорость вращения ротора зависит от количества полюсов. При 2 полюсах скорость вращения будет равна скорости вращения магнитного поля, равного максимум 3000 оборотов в секунду при частоте сети 50 Гц. Что бы понизить скорость вдвое, необходимо увеличить количество полюсов в статоре до четырех.
Весомым недостатком асинхронных двигателей является то, что они подаются регулировке скорости вращения вала только при помощи изменения частоты электрического тока. А так не возможно добиться постоянной частоты вращения вала.
Принцип работы и устройство синхронного электродвигателя переменного тока
Данный вид электродвигателя используется в быту там, где необходима постоянная скорость вращения, возможность ее регулировки, а так же если необходима скорость вращения более 3000 оборотов в минуту (это максимум для асинхронных).
Синхронные моторы устанавливаются в электроинструменте, пылесосе, стиральной машине и т. д.
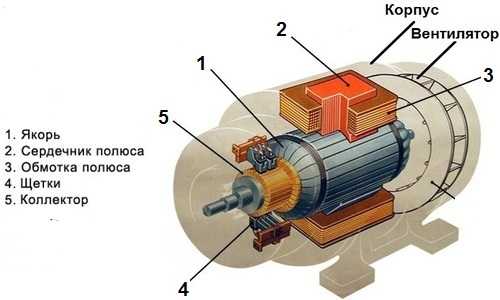
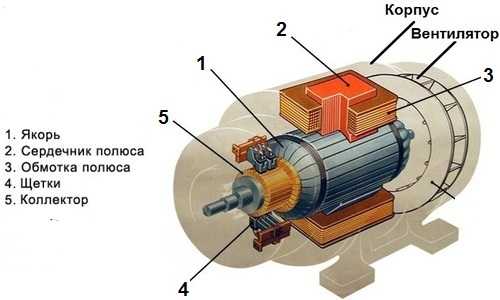
В корпусе синхронного двигателя переменного тока расположены обмотки (3 на рисунке), которые также намотаны и на ротор или якорь (1). Их выводы припаяны к секторам токосъемного кольца или коллектора (5), на которые при помощи графитовых щеток (4) подается напряжение. При чем выводы расположены так, что щетки всегда подают напряжение только на одну пару.
Наиболее частыми поломками коллекторных двигателей является:
- Износ щетокили их плохой их контакт из-за ослабления прижимной пружины.
- Загрязнение коллектора.Чистите либо спиртом или нулевой наждачной бумагой.
- Износ подшипников.
Принцип работы. Вращающий момент в электромоторе создается в результате взаимодействия между током тока якоря и магнитным потоком в обмотке возбуждения. С изменением направления переменного тока будет меняться и направление магнитного потока одновременно в корпусе и якоре, благодаря чему вращение всегда будет в одну сторону.
Регулировка скорости вращения меняется методом изменения величины подаваемого напряжения. В дрелях и пылесосах для этого используется реостат или переменное сопротивление.
Изменение направления вращения происходит также как и у двигателей постоянного тока, о которых Я расскажу в следующей статье.
Самое главное о синхронных двигателях Я постарался изложить, более подробно Вы можете прочитать на них на Википедии.
Понравилась статья? Поделиться с друзьями:
elektro-enot.ru
Принцип работы электродвигателя переменного тока, устройство электромотора.
Электрические двигатели – это силовые машины, применяющиеся для превращения электрической энергии в механическую. Общая классификация разделяет их по типу питающего тока на двигатели постоянного и переменного тока. В статье ниже рассматриваются электрические двигатели со спецификацией под переменный ток, их виды, отличительные характеристики и преимущества.
Для общей информации, рекомендуем прочитать нашу отдельную статью о принципах работы электродвигателей.
Содержание:

Электродвигатель переменного тока промышленного типа
Принцип преобразования энергии
Среди электрических двигателей, применяемых во всех отраслях промышленности и бытовых электроприборах, наибольшее распространение имеют двигатели переменного тока. Они встречаются практически в каждой сфере жизнедеятельности – от детских игрушек и стиральных машин до автомобилей и мощных производственных станков.
Принцип работы всех электрических двигателей основывается на законе электромагнитной индукции Фарадея и законе Ампера. Первый из них описывает ситуацию, когда на замкнутом проводнике, находящемся в изменяющемся магнитном поле, генерируется электродвижущая сила. В двигателях это поле создается через обмотки статора, по которым протекает переменный ток. Внутри статора (представляющего собой корпус устройства) находится подвижный элемент двигателя – ротор. На нем и возникает ток.
Вращение ротора объясняется законом Ампера, который утверждает, что на электрические заряды, протекающие по проводнику, находящемуся внутри магнитного поля, действует сила, движущая их в плоскости, перпендикулярной силовым линиям этого поля. Проще говоря, проводник, которым в конструкции двигателя является ротор, начинает вращаться вокруг своей оси, а закрепляется он на валу, к которому подключаются рабочие механизмы оборудования.
Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец. Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
- Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Помимо описанных ключевых элементов асинхронного электродвигателя, в его конструкцию также входит вентилятор для охлаждения обмоток, клеммная коробка и вал, передающий генерируемое вращение на рабочие механизмы оборудования, работа которого обеспечивается данным двигателем.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.
Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
Трехфазный генератор переменного тока
История изобретения
Изобретение простейшего способа преобразования энергии из электрической в механическую принадлежит Майклу Фарадею. В 1821 году этот великий английский ученый провел эксперимент с проводником, опущенным в сосуд с ртутью, на дне которого лежал постоянный магнит. После подачи электричества на проводник он приходил в движение, вращаясь соответственно силовым линиями магнитного поля. В наши дни этот опыт часто проводят на уроках физики, заменяя ртуть рассолом.
Дальнейшее изучение вопроса привело к созданию Питером Барлоу в 1824 году униполярного двигателя, названного колесом Барлоу. В его конструкцию входят два зубчатых колеса из меди, расположенных на одной оси между постоянными магнитами. После подачи тока на колеса, в результате его взаимодействия с магнитными полями, колеса начинают вращаться. Во время опытов ученый установил, что направление вращения можно изменить, поменяв полярность (перестановкой магнитов или контактов). Практического применения «колесо Барлоу», но сыграло важную роль в изучении взаимодействия магнитных полей и заряженных проводников.
Первый рабочий образец устройства, ставшего прародителем современных двигателей, был создан русским физиком Борисом Семеновичем Якоби в 1834 году. Принцип использования вращающегося ротора в магнитном поле, продемонстрированный в этом изобретении, практически в неизменном виде применяется современных двигателях постоянного тока.
А вот создание первого двигателя с асинхронным принципом работы принадлежит сразу двум ученым – Николе Тесла и Галилео Феррарис, по удачному стечению обстоятельств продемонстрировавшим свои изобретения в один год (1888). Через несколько лет двухфазный бесколлекторный двигатель переменного тока, созданный Николой Тесла уже использовался на нескольких электростанциях. В 1889 году русский электротехник Михаил Осипович Доливо-Добровольский усовершенствовал изобретение Теслы для работы в трехфазной сети, благодаря чему смог создать первый асинхронный двигатель переменного тока мощностью более 100 Вт. Ему же принадлежит изобретение используемых сегодня способов подключения фаз в трехфазных электродвигателях: «звезда» и «треугольник», пусковых реостатов и трехфазных трансформаторов.
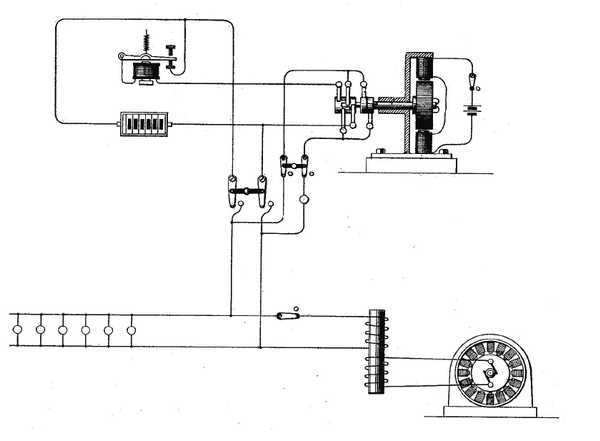
Система переменного тока, предложенная Вестингаузом
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
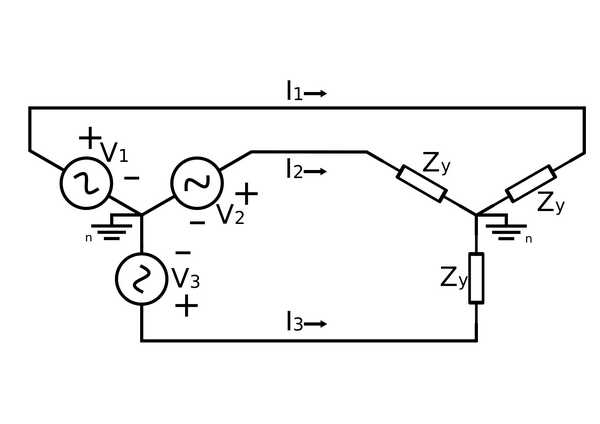
Подключение к трехфазной сети представляется несколько более сложным. В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»). Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Преимущества и недостатки электрических двигателей переменного тока
В наши дни среди всех электродвигателей устройства для переменного тока занимают лидирующую позицию по объему использования в силовых установках. Они обладают низкой себестоимостью, простой в обслуживании конструкцией и КПД не менее 90%. Кроме того, их устройство позволяет плавно изменять скорость вращения, не прибегая к помощи дополнительного оборудования вроде коробок передач.
Главным недостатком двигателей переменного тока с асинхронным принципом работы является тот факт, что регулировать их частоту вращения вала можно только изменяя входную частоту тока. Это не позволяет добиться постоянной скорости вращения, а также снижает мощность. Для асинхронных электродвигателей характерны высокие пусковые токи, но низкий пусковой момент. Для исправления этих недостатков применяется частотный привод, однако его цена противоречит одному из главных достоинств этих двигателей – низкой себестоимости.
Слабым местом синхронного двигателя является его сложная конструкция. Графитовые щетки довольно быстро выходят из строя под нагрузкой, а также теряют плотный контакт с коллектором из-за ослабления прижимной пружины. Кроме того, эти двигатели, как и асинхронные аналоги, не защищены от износа подшипников вала. К недостаткам также относится более сложный пуск, необходимость наличия источника постоянного тока и исключительно частотная регулировка частоты вращения.
Применение
На сегодняшний день электродвигатели со спецификацией на переменный ток распространены во всех сферах промышленности и жизнедеятельности. На электростанциях они устанавливаются в качестве генераторов, используются в производственном оборудовании, автомобилестроении и даже бытовой технике. Сегодня в каждом доме можно встретить как минимум одно устройство с электрическим двигателем переменного тока, например, стиральную машину. Причины столь большой популярности заключаются в универсальности, долговечности и легкости обслуживания.
Среди асинхронных электрических машин наибольшее распространение получили устройства с трехфазной спецификацией. Они являются наилучшим вариантом для использования во многих силовых агрегатах, генераторах и высокомощных установках, работа которых связана с необходимостью контроля скорости вращения вала.
Это может быть интересно:tokidet.ru
Принцип работы электродвигателя. Простыми словами о сложном
Принцип работы электродвигателя основывается на эффекте обнаруженном Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита, может возникнуть непрерывное вращение.
Принцип работы электродвигателя постоянного тока
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться. В результате рамка повернется в горизонтальное положение, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент. На рисунке выше это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
Простыми словами о сложном
На самом деле там векторное произведение, дифференциалы и т.п. но это детали, а у нас упрощённый случай. И так…
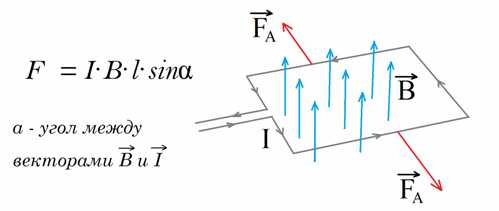
Рис. 1 Основа работы электрического двигателя
Направление силы ампера определяется правилом левой руки.
Рис. 2 Правило левой руки
Мысленно ставим левую ладонь на верхний рисунок и получаем направление сил Ампера. Она типа растягивают рамку с током в том положении как нарисовано на рис.1. И никуда вертеться тут ничего не будет, рамка в равновесии, устойчивом.
А если рамка с током повернута по-другому, то вот что будет:
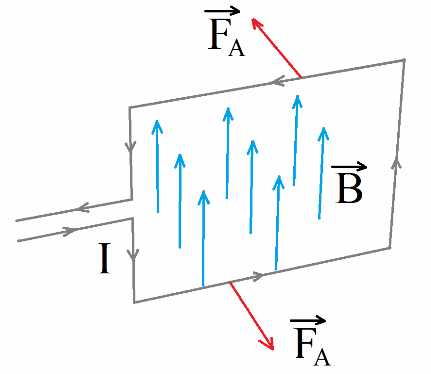
Рис. 3 Рамка
Здесь уже равновесия нет, сила Ампера разворачивает противоположные стенки так, что рамка начинает вращаться. Появляется механическое вращение. Это основа электрического двигателя, самая суть, дальше только детали.
Далее.
Теперь что будет делать рамка с током на рис.3?. Если система идеальная, без трения, то очевидно будут колебания. Если трение присутствует, то колебания постепенно затухнут, рамка с током стабилизируется и станет как на рис.1.
Но нам нужно постоянное вращение и достичь его можно двумя принципиально разными способами и отсюда и возникает разница между двигателями постоянного и переменного трёхфазного тока.
Принцип работы электродвигателя постоянного тока
Способ 1. Смена направления тока в рамке.
Этот способ используется в двигателях постоянного тока и его потомках.
Наблюдаем за картинками. Пусть наш двигатель обесточен и рамка с током ориентирована как-то хаотично, вот так например:
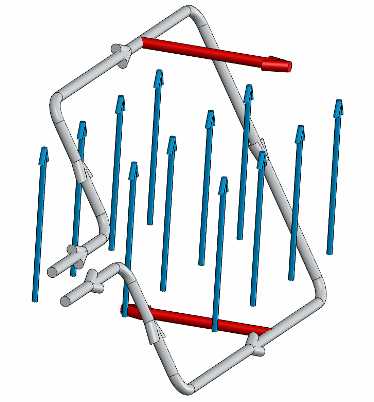
Рис. 4.1 Случайно расположенная рамка
На случайно расположенную рамку действует сила Ампера и она начинает вращаться.
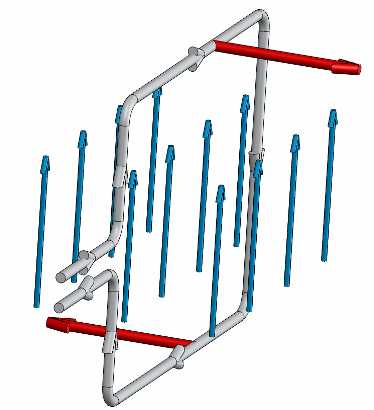
Рис. 4.2
В процессе движения рамка достигает угла 90°. Момент (момент пары сил или вращательный момент) максимальный.

Рис. 4.3
И вот рамка достигает положения, когда момента вращения нет. И если сейчас не отключить ток, то сила Ампера будет уже тормозить рамку и в конце полуоборота рамка остановится и начнёт вращение в противоположном направлении. Но нам ведь этого не надо.
Поэтому мы на рис.3 делаем хитрый ход – меняем направление тока в рамке.

Рис. 4.4
И вот после пересечения этого положения, рамка с поменянным направлением тока уже не тормозится, а снова разгоняется.
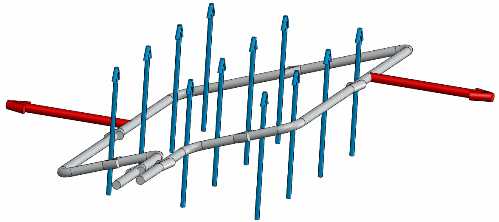
Рис. 4.5
А когда рамка подходит к следующему положению равновесия, мы меняем ток ещё раз.

Рис. 4.6
И рамка опять продолжает ускоряться куда нам надо.
Вот так и получается постоянное вращение. Красиво? Красиво. Нужно только менять направление тока два раза за оборот и всего делов.
А делает это, т.е. обеспечивает смену тока специальный узел – щёточно-коллекторный узел. Принципиально он устроен так:
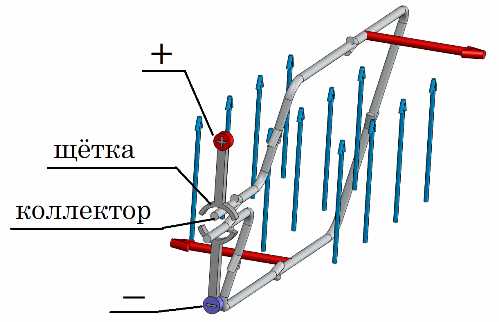
Рис. 5
Рисунок понятен и без пояснений. Рамка трётся то об один контакт, то об другой и так вот ток и меняется.
Очень важная особенность щёточно-коллекторного узла – его малый ресурс. Из-за трения. Например, вот движок ДПР-52-Н1 – минимальная наработка 1000 часов. В то же время срок службы современных бесколлекторных двигателей более 10000 часов, а двигателей переменного тока (там тоже нет ЩКУ) более 40000 часов.
Принцип работы электродвигателя переменного тока
Способ 2. Вращается магнитный поток, т.е. магнитное поле.
Вращающееся магнитное поле получают с помощью переменного трёхфазного тока. Вот есть статор.
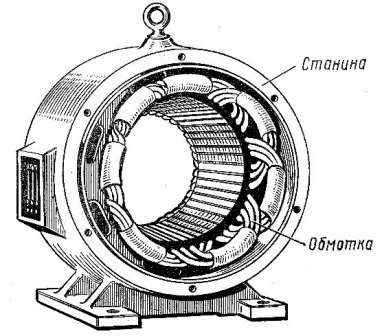
Рис. 6 Статор электродвигателя
А есть значит 3 фазы переменного тока.
Рис. 7
Между ними как видно на Рис. 7 120 градусов, электрических градусов.
Эти три фазы укладывают в статор специальным образом, чтобы они геометрически были повернуты друг к дружке на 120°.
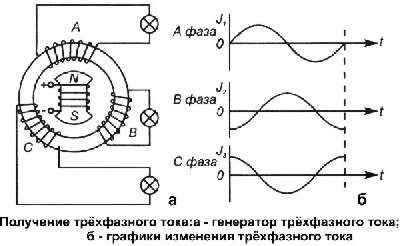
Рис. 8
И тогда при подаче трёхфазного питания получается само собой за счёт складывания магнитных потоков от трёх обмоток вращающееся магнитное поле.
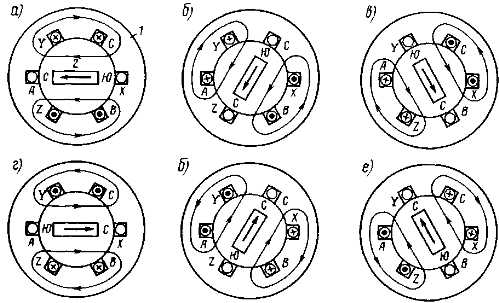
Рис. 9 Вращающееся магнитное поле
Далее вращающееся магнитное поле влияет силой Ампера на нашу рамку и она вращается.
Но здесь есть тоже различия, два разных способа.
Способ 2а. Рамка запитывается (синхронный двигатель).
Подаём значит на рамку напряжение (постоянное), рамка выставляется по магнитному полю. Помните рис.1 из самого начала? Вот так рамка и становится.
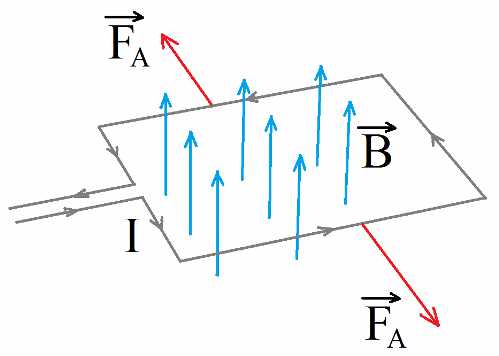
Рис. 10 (Рис.1)
Но поле магнитное у нас тут вращается, а не просто так висит. Рамка чего будет делать? Тоже будет вращаться, следуя за магнитным полем.
Они (рамка и поле) вращаются с одинаковой частотой, или синхронно, поэтому такие двигатели называются синхронными двигателями.
Способ 2б. Рамка не запитывается (асинхронный двигатель).
Фишка в том, что рамка не запитывается, совсем не запитывается. Просто проволока такая замкнутая.
Когда мы начинаем вращать магнитное поле, по законам электромагнетизма в рамке наводится ток. От этого тока и магнитного поля получается сила Ампера. Но сила Ампера будет возникать только если рамка движется относительно магнитного поля (известная история с опытами Ампера и его походами в соседнюю комнату).
Так что рамка всегда будет отставать от магнитного поля. А то, если она его вдруг почему-то догонит, то пропадёт наводка от поля, пропадёт ток, пропадёт сила Ампера и всё вообще пропадёт. То есть, в асинхронном двигателе рамка всегда отстаёт от поля и частота у них значит разная, то есть вращаются они асинхронно, поэтому и двигатель называется асинхронным.
Смотрите также по этой теме:
Как работает электродвигатель. Преимущества и недостатки разных видов.
Асинхронный двигатель. Устройство и принцип работы.
Будем рады, если подпишетесь на наш Блог!
[wysija_form id=»1″]
powercoup.by
Устройство и принцип работы электродвигателя переменного тока
Электродвигатель – это электротехническое устройство для преобразования электрической энергии в механическую. Сегодня повсеместно применяются электромоторы в промышленности для привода различных станков и механизмов. В домашнем хозяйстве они установлены в стиральной машине, холодильнике, соковыжималке, кухонном комбайне, вентиляторах, электробритвах и т. п. Электродвигатели приводят в движение, подключенные к ней устройства и механизмы.
В этой статье Я расскажу о самых распространенных видах и принципах работы электрических двигателей переменного тока, широко используемых в гараже, в домашнем хозяйстве или мастерской.
Как работает электродвигатель
Двигатель работает на основе эффекта, обнаруженного Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита может возникнуть непрерывное вращение.
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться. В результате рамка повернется в горизонтальное положения, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент. На рисунке это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
В быту же постоянные магниты используются в детских игрушках на батарейках.
В других же более мощных двигателях используются только электромагниты или обмотки. Вращающаяся часть с ними называется ротор, а неподвижная- статор.
Виды электродвигателей
Сегодня существуют довольно много электродвигателей разных конструкций и типов. Их можно разделить по типу электропитания:
- Переменного тока, работающие напрямую от электросети.
- Постоянного тока, которые работают от батареек, АКБ, блоков питания или других источников постоянного тока.
По принципу работы:
- Синхронные, в которых есть обмотки на роторе и щеточный механизм для подачи на них электрического тока.
- Асинхронные, самый простой и распространенный вид мотора. В них нет щеток и обмоток на роторе.
Синхронный мотор вращается синхронно с магнитным полем, которое его вращает, а у асинхронного ротор вращается медленнее вращающегося магнитного поля в статоре .
Принцип работы и устройство асинхронного электродвигателя
В корпусе асинхронного двигателя укладываются обмотки статора (для 380 Вольт их будет 3), которые создают вращающееся магнитное поле. Концы их для подключения выводятся на специальную клеммную колодку. Охлаждаются обмотки, благодаря вентилятору, установленному на вале в торце электродвигателя.
Ротор, являющиеся одним целым с валом, изготавливается из металлических стержней, которые замыкаются между собой с обоих сторон, поэтому он и называется короткозамкнутым.
Благодаря такой конструкции отпадает необходимость в частом периодическом обслуживании и замене токоподающих щеток, многократно увеличивается надежность, долговечность и безотказность.
Как правило, основной причиной поломки асинхронного мотора является износ подшипников, в которых вращается вал.
Принцип работы. Для того что бы работал асинхронный двигатель необходимо, что бы ротор вращался медленнее электромагнитного поля статора, в результате чего наводится ЭДС (возникает электроток) в роторе. Здесь важное условие, если бы ротор вращался с такой же скоростью как и магнитное поле, то в нем по закону электромагнитной индукции не наводилось бы ЭДС и, следовательно не было бы вращения. Но в реальности, из-за трения подшипников или нагрузки на вал, ротор всегда будет вращаться медленнее.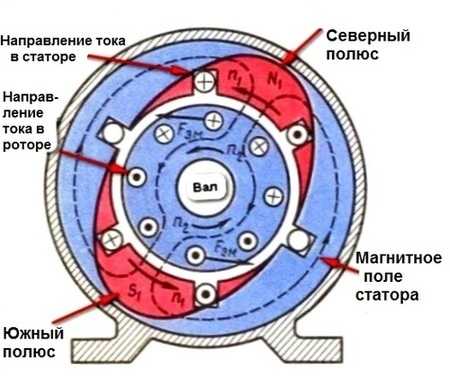
Магнитные полюса постоянно вращаются в обмотках мотора, и постоянно меняется направление тока в роторе. В один момент времени, например направление токов в обмотках статора и ротора изображено схематично в виде крестиков (ток течет от нас) и точек (ток на нас). Вращающееся магнитное поле изображено изображено пунктиром.
Например, как работает циркулярная пила. Наибольшие обороты у нее без нагрузки. Но как только мы начинаем резать доску, скорость вращения уменьшается и одновременно с этим ротор начинает медленнее вращаться относительно электромагнитного поля и в нем по законам электротехники начинает наводится еще большей величины ЭДС. Вырастает потребляемый ток мотором и он начинает работать на полной мощности. Если же нагрузка на вал будет столь велика, что его застопорит, то может возникнуть повреждение короткозамкнутого ротора из-за максимальной величины наводимой в нем ЭДС. Вот почему важно подбирать двигатель, подходящей мощности. Если же взять большей, то неоправданными будут энергозатраты.
Скорость вращения ротора зависит от количества полюсов. При 2 полюсах скорость вращения будет равна скорости вращения магнитного поля, равного максимум 3000 оборотов в секунду при частоте сети 50 Гц. Что бы понизить скорость вдвое, необходимо увеличить количество полюсов в статоре до четырех.
Весомым недостатком асинхронных двигателей является то, что они подаются регулировке скорости вращения вала только при помощи изменения частоты электрического тока. А так не возможно добиться постоянной частоты вращения вала.
Принцип работы и устройство синхронного электродвигателя переменного тока
Данный вид электродвигателя используется в быту там, где необходима постоянная скорость вращения, возможность ее регулировки, а так же если необходима скорость вращения более 3000 оборотов в минуту (это максимум для асинхронных).
Синхронные моторы устанавливаются в электроинструменте, пылесосе, стиральной машине и т. д.
 В корпусе синхронного двигателя переменного тока расположены обмотки (3 на рисунке), которые также намотаны и на ротор или якорь (1). Их выводы припаяны к секторам токосъемного кольца или коллектора (5), на которые при помощи графитовых щеток (4) подается напряжение. При чем выводы расположены так, что щетки всегда подают напряжение только на одну пару.
В корпусе синхронного двигателя переменного тока расположены обмотки (3 на рисунке), которые также намотаны и на ротор или якорь (1). Их выводы припаяны к секторам токосъемного кольца или коллектора (5), на которые при помощи графитовых щеток (4) подается напряжение. При чем выводы расположены так, что щетки всегда подают напряжение только на одну пару.
Наиболее частыми поломками коллекторных двигателей является:
- Износ щеток или их плохой их контакт из-за ослабления прижимной пружины.
- Загрязнение коллектора. Чистите либо спиртом или нулевой наждачной бумагой.
- Износ подшипников.
Принцип работы. Вращающий момент в электромоторе создается в результате взаимодействия между током тока якоря и магнитным потоком в обмотке возбуждения. С изменением направления переменного тока будет меняться и направление магнитного потока одновременно в корпусе и якоре, благодаря чему вращение всегда будет в одну сторону.
Регулировка скорости вращения меняется методом изменения величины подаваемого напряжения. В дрелях и пылесосах для этого используется реостат или переменное сопротивление.
Изменение направления вращения происходит также как и у двигателей постоянного тока, о которых Я расскажу в следующей статье.
Самое главное о синхронных двигателях Я постарался изложить, более подробно Вы можете прочитать на них на Википедии.
Режимы работы электродвигателя в следующей статье.
jelektro.ru
Принцип работы электродвигателя – устройство и отличия разных видов
Электродвигатели – это устройства, в которых электрическая энергия превращается в механическую. В основе принципа их действия лежит явление электромагнитной индукции.
Однако способы взаимодействия магнитных полей, заставляющих вращаться ротор двигателя, существенно различаются в зависимости от типа питающего напряжения – переменного или постоянного.
Устройство и принцип действия электродвигателя постоянного тока
В основе принципа работы электродвигателя постоянного тока лежит эффект отталкивания одноименных полюсов постоянных магнитов и притягивания разноименных. Приоритет ее изобретения принадлежит русскому инженеру Б. С. Якоби. Первая промышленная модель двигателя постоянного тока была создана в 1838 году. С тех пор его конструкция не претерпела кардинальных изменений.
В двигателях постоянного тока небольшой мощности один из магнитов является физически существующим. Он закреплен непосредственно на корпусе машины. Второй создается в обмотке якоря после подключения к ней источника постоянного тока. Для этого используется специальное устройство – коллекторно-щеточный узел. Сам коллектор – это токопроводящее кольцо, закрепленное на валу двигателя. К нему подключены концы обмотки якоря.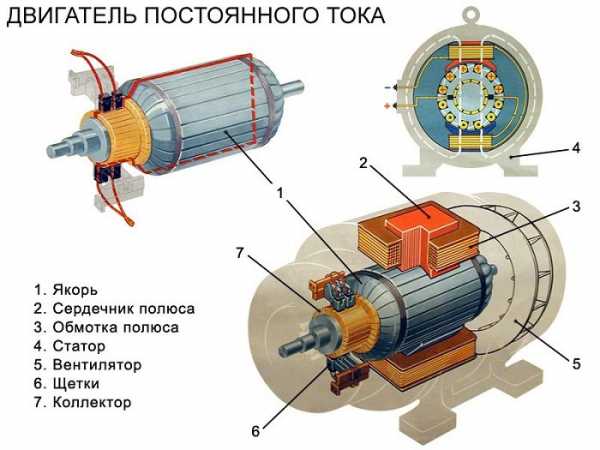
Чтобы возник вращающий момент, необходимо непрерывно менять местами полюса постоянного магнита якоря. Происходить это должно в момент пересечения полюсом так называемой магнитной нейтрали. Конструктивно такая задача решается разделением кольца коллектора на секторы, разделенные диэлектрическими пластинами. Концы обмоток якоря присоединяются к ним поочередно.
В двигателях большой мощности физически существующих магнитов не используют из-за их большого веса. Для создания постоянного магнитного поля статора используется несколько металлических стержней, каждый из которых имеет собственную обмотку из проводника, подключенного к плюсовой или минусовой питающей шине. Одноименные полюса включаются последовательно друг другу.
Количество пар полюсов на корпусе двигателя может быть равно одной или четырем. Число токосъемных щеток на коллекторе якоря должно ему соответствовать.
 Электродвигатели большой мощности имеют ряд конструктивных хитростей. Например, после запуска двигателя и с изменением нагрузки на него, узел токосъемных щеток сдвигается на определенный угол против вращения вала. Так компенсируется эффект «реакции якоря», ведущий к торможению вала и снижению эффективности электрической машины.
Электродвигатели большой мощности имеют ряд конструктивных хитростей. Например, после запуска двигателя и с изменением нагрузки на него, узел токосъемных щеток сдвигается на определенный угол против вращения вала. Так компенсируется эффект «реакции якоря», ведущий к торможению вала и снижению эффективности электрической машины.
Также существует три схемы подключения двигателя постоянного тока:
- с параллельным возбуждением;
- последовательным;
- смешанным.
Параллельное возбуждение – это когда параллельно обмотке якоря включается еще одна независимая, обычно регулируемая (реостат). Такой способ подключения позволяет очень плавно регулировать скорость вращения и достигать ее максимальной стабильности. Его используют для питания электродвигателей станков и кранового оборудования.
Последовательная – в цепь питания якоря дополнительная обмотка включена последовательно. Такой тип подключения используется для того, чтобы в нужный момент резко нарастить вращающее усилие двигателя. Например, при трогании с места железнодорожных составов.
Двигатели постоянного тока имеют возможность плавной регулировки частоты вращения, поэтому их применяют в качестве тяговых на электротранспорте и грузоподъемном оборудовании.
Двигатели переменного тока — в чем отличие?
 Устройство и принцип работы электродвигателя переменного тока для создания крутящего момента предусматривают использование вращающегося магнитного поля. Их изобретателем считается русский инженер М. О. Доливо-Добровольский, создавший в 1890 году первый промышленный образец двигателя и являющийся основоположником теории и техники трехфазного переменного тока.
Устройство и принцип работы электродвигателя переменного тока для создания крутящего момента предусматривают использование вращающегося магнитного поля. Их изобретателем считается русский инженер М. О. Доливо-Добровольский, создавший в 1890 году первый промышленный образец двигателя и являющийся основоположником теории и техники трехфазного переменного тока.
Вращающееся магнитное поле возникает в трех обмотках статора двигателя сразу, как только они подключаются к цепи питающего напряжения. Ротор такого электромотора в традиционном исполнении не имеет никаких обмоток и представляет собой, грубо говоря, кусок железа, чем-то напоминающий беличье колесо.
Магнитное поле статора провоцирует возникновение в роторе тока, причем очень большого, ведь это короткозамкнутая конструкция. Этот ток вызывает возникновение собственного поля якоря, которое «сцепляется» с вихревым магнитным потом статора и заставляет вращаться вал двигателя в том же направлении.
Магнитное поле якоря имеет ту же скорость, что и статора, но отстает от него по фазе примерно на 8–100. Именно поэтому двигатели переменного тока называются асинхронными.Принцип действия электродвигателя переменного тока с традиционным, короткозамкнутым ротором, имеет очень большие пусковые токи. Вероятно, многие из вас это замечали – при пуске двигателей лампы накаливания меняют яркость свечения. Поэтому в электрических машинах большой мощности применяется фазный ротор – на нем уложены три обмотки, соединенные «звездой».
Обмотки якоря не подключены к питающей сети, а посредством коллекторно-щеточного узла соединены с пусковым реостатом. Процесс включения такого двигателя состоит из соединения с питающей сетью и постепенного уменьшения до нуля активного сопротивления в цепи якоря. Электромотор включается плавно и без перегрузок.
Особенности использования асинхронных двигателей в однофазной цепи
 Несмотря на то, что вращающееся магнитное поле статора проще всего получить от трехфазного напряжения, принцип действия асинхронного электродвигателя позволяет ему работать и от однофазной, бытовой сети, если в их конструкцию будут внесены некоторые изменения.
Несмотря на то, что вращающееся магнитное поле статора проще всего получить от трехфазного напряжения, принцип действия асинхронного электродвигателя позволяет ему работать и от однофазной, бытовой сети, если в их конструкцию будут внесены некоторые изменения.
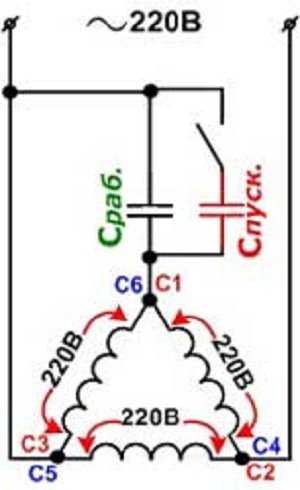
Для этого на статоре должно быть две обмотки, одна из которой является «пусковой». Ток в ней сдвигается по фазе на 90° за счет включения в цепь реактивной нагрузки. Чаще всего для этого используется конденсатор.
Запитать от бытовой розетки можно и промышленный трехфазный двигатель. Для этого в его клеммной коробке две обмотки соединяются в одну, и в эту цепь включается конденсатор. Исходя из принципа работы асинхронных электродвигателей, запитанных от однофазной цепи, следует указать, что они имеют меньший КПД и очень чувствительны к перегрузкам.
Электродвигатели этого типа легко запускаются, но частоту их вращения практически невозможно регулировать.Они чувствительны к перепадам напряжения, а при «недогрузе» снижают коэффициент полезного действия, становясь источником непропорционально больших затрат электроэнергии. При этом существуют методы использования асинхронного двигателя как генератор.
Универсальные коллекторные двигатели — принцип работы и характеристики
 В бытовых электроинструментах малой мощности, от которых требуются малые пусковые токи, большой вращающий момент, высокая частота вращения и возможность ее плавной регулировки, используются так называемые универсальные коллекторные двигатели. По своей конструкции они аналогичны двигателям постоянного тока с последовательным возбуждением.
В бытовых электроинструментах малой мощности, от которых требуются малые пусковые токи, большой вращающий момент, высокая частота вращения и возможность ее плавной регулировки, используются так называемые универсальные коллекторные двигатели. По своей конструкции они аналогичны двигателям постоянного тока с последовательным возбуждением.
В таких двигателях магнитное поле статора создается за счет питающего напряжения. Только немного изменена конструкция магнитопроводов – она не литая, а наборная, что позволяет уменьшать перемагничивание и нагрев токами Фуко. Последовательно включенная в цепь якоря индуктивность дает возможность менять направление магнитного поля статора и якоря в одном направлении и в той же фазе.
Практически полная синхронность магнитных полей позволяет двигателю набирать обороты даже при значительных нагрузках на валу, что и требуется для работы дрелей, перфораторов, пылесосов, «болгарок» или полотерных машин.
Если в питающую цепь такого двигателя включен регулируемый трансформатор, то частоту его вращения можно плавно менять. А вот направление, при питании от цепи переменного тока, изменить не удастся никогда.
Такие электромоторы способны развивать очень высокие обороты, компактны и имеют больший вращающий момент. Однако наличие коллекторно-щеточного узла снижает их моторесурс – графитовые щетки достаточно быстро истираются на высоких оборотах, особенно если коллектор имеет механические повреждения.Электродвигатели имеют самый большой КПД (более 80 %) из всех устройств, созданных человеком. Их изобретение в конце XIX века вполне можно считать качественным цивилизационным скачком, ведь без них невозможно представить жизнь современного общества, основанного на высоких технологиях, а чего-либо более эффективного пока еще не придумано.
Синхронный принцип работы электродвигателя на видео
elektrik24.net
Электродвигатель постоянного тока — Википедия
 Пример простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным ротором
Пример простейшего коллекторного двигателя постоянного тока с двухполюсным статором и с двухполюсным роторомЭлектродвигатель постоянного тока (ДПТ) — электрическая машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию.
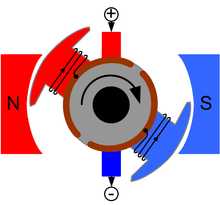 Схема электродвигателя с двумя обмотками электромагнита на якоре
Схема электродвигателя с двумя обмотками электромагнита на якоре 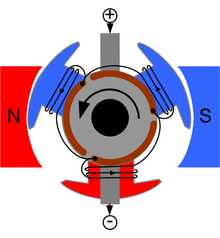 Схема электродвигателя с тремя обмотками электромагнита на якоре
Схема электродвигателя с тремя обмотками электромагнита на якореЭтот двигатель можно ещё назвать синхронной машиной постоянного тока с самосинхронизацией. Простейший двигатель, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), одного электромагнита с явно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с двумя пластинами (ламелями) и двумя щётками.
Простейший двигатель имеет два положения ротора (две «мёртвые точки»), из которых невозможен самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное). В этом случае крутящий момент равен:
- Ms=s⋅2⋅B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{s}=s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)},
где s{\displaystyle s} — число витков обмотки ротора,
B{\displaystyle B} — индукция магнитного поля полюсов статора,
I{\displaystyle I} — ток в обмотке ротора [А],
L{\displaystyle L} — длина рабочей части витка обмотки [м],
r{\displaystyle r} — расстояние от оси ротора до рабочей части витка обмотки ротора (радиус) [м],
sin{\displaystyle \sin } — синус угла между направлением северный-южный полюс статора и аналогичным направлением в роторе [рад],
w{\displaystyle w} — угловая скорость [рад/сек],
t{\displaystyle t} — время [сек].
Из-за наличия угловой ширины щёток и углового зазора между пластинами (ламелями) коллектора в двигателе этой конструкции имеются динамически постоянно короткозамкнутые щётками части обмотки ротора. Число короткозамкнутых частей обмотки ротора равно числу щёток. Эти короткозамкнутые части обмотки ротора не участвуют в создании общего крутящего момента.
Суммарная короткозамкнутая часть ротора в двигателях с одним коллектором равна:
- n⋅α/(2⋅π){\displaystyle n\cdot \alpha /(2\cdot \pi )},
где n{\displaystyle n} — число щёток,
α{\displaystyle \alpha } — угловая ширина одной щётки [радиан].
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент s{\displaystyle s} рамок (витков) с током за один оборот равен площади под интегральной кривой крутящего момента, делённой на длину периода (1 оборот = 2π{\displaystyle 2\pi }):
- Mkrsr=(2⋅∫0πs⋅2⋅B⋅I⋅L⋅r⋅sin(w⋅t)d(w⋅t))/(2⋅π)=s⋅2⋅B⋅I⋅L⋅r⋅(∫0πsin(w⋅t)d(w⋅t))/π{\displaystyle Mkrsr=\left(2\cdot \int \limits _{0}^{\pi }s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)d(w\cdot t)\right)/(2\cdot \pi )=s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \left(\int \limits _{0}^{\pi }\sin(w\cdot t)d(w\cdot t)\right)/\pi }.
Двигатель, показанный на рис. 2, состоит из:
— одного электромагнита на статоре (двухполюсного статора) с явно выраженными полюсами и с одной обмоткой,
— ротора с тремя зубцами и, соответственно, с тремя обмотками (обмотки ротора при такой конструкции могут быть включены звездой (в столь маломощной машине условия коммутации допускают такое соединение) или треугольником),
— щёточноколлекторного узла с тремя пластинами (ламелями) и с двумя щётками.
Самозапуск возможен из любого положения ротора. Имеет меньшую неравномерность крутящего момента, чем двигатель с двухзубцовым ротором (рис. 1).
ДПТ являются обратимыми электрическими машинами, то есть в определённых условиях способны работать как генераторы постоянного тока.
Сокращение ДПТ (двигатель постоянного тока) является неудачным, так как название «двигатель переменного тока» имеет то же сокращение — ДПТ. Но так как двигатели переменного тока разделяются на асинхронные (АД) и синхронные (СД), сокращение ДПТ относят к двигателям постоянного тока.
Статор (индуктор)[править | править код]
На статоре ДПТ располагаются, в зависимости от конструкции, или постоянные магниты (микродвигатели), или электромагниты с обмотками возбуждения (катушками, наводящими магнитный поток возбуждения).
В простейшем случае статор имеет два полюса, то есть один магнит с одной парой полюсов. Но чаще ДПТ имеют две пары полюсов. Бывает и более. Помимо основных полюсов на статоре (индукторе) могут устанавливаться добавочные полюса, которые предназначены для улучшения коммутации на коллекторе.
Ротор (якорь)[править | править код]
Минимальное число зубцов ротора, при котором самозапуск возможен из любого положения ротора — три. Из трёх, кажущихся явно выраженными, полюсов, на самом деле один полюс всё время находится в зоне коммутации, то есть ротор имеет минимум одну пару полюсов (как и статор, так как в противном случае работа двигателя невозможна).
Ротор любого ДПТ состоит из многих катушек, на часть которых подаётся питание, в зависимости от угла поворота ротора, относительно статора. Применение большого числа (несколько десятков) катушек, необходимо для уменьшения неравномерности крутящего момента, для уменьшения коммутируемого (переключаемого) тока, и для обеспечения оптимального взаимодействия между магнитными полями ротора и статора (то есть для создания максимального момента на роторе).
При вычислении момента инерции ротора его, в первом приближении, можно считать сплошным однородным цилиндром с моментом инерции, равным:
- Ja=(1/2)⋅m⋅R2{\displaystyle J_{a}=(1/2)\cdot m\cdot R^{2}},
где m{\displaystyle m} — масса цилиндра (ротора),
а R{\displaystyle R} — радиус цилиндра (ротора).
Коллектор[править | править код]
Коллектор (щёточно-коллекторный узел) выполняет одновременно две функции: является датчиком углового положения ротора и переключателем тока со скользящими контактами.
Конструкции коллекторов имеют множество разновидностей.
Выводы всех катушек объединяются в коллекторный узел. Коллекторный узел обычно представляет собой кольцо из изолированных друг от друга пластин-контактов (ламелей), расположенных по оси (вдоль оси) ротора. Существуют и другие конструкции коллекторного узла.
Рис. 4 Графитовые щёткиЩёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый).
Щётки с большой частотой размыкают и замыкают пластины-контакты коллектора ротора. Как следствие, при работе ДПТ происходят переходные процессы в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает надёжность ДПТ. Для уменьшения искрения применяются различные способы, основным из которых является установка добавочных полюсов.
При больших токах в роторе ДПТ возникают мощные переходные процессы, в результате чего искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора недопустим. При проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.
Принципу работы электродвигателя постоянного тока может быть дано два описания:
- 1. подвижная рамка (два стержня с замкнутыми концами) с током в магнитном поле статора
или
- 2. взаимодействие магнитных полей статора и ротора.
Рамка с током, в однородном магнитном поле полюсов статора с индукцией B{\displaystyle B}, на два стержня рамки длиной L{\displaystyle L}, и с током I{\displaystyle I}, действует сила Ампера F{\displaystyle F}, постоянной величины, равные:
- F=B⋅I⋅L{\displaystyle F=B\cdot I\cdot L} и направленные в противоположные стороны.
Эти силы прикладываются к плечам p{\displaystyle p}, равным:
- p=r⋅sin(w⋅t){\displaystyle p=r\cdot \sin(w\cdot t)}, где r{\displaystyle r} — радиус рамки;
и создают крутящий момент Mk{\displaystyle M_{k}}, равный:
- Mk=F⋅p=B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{k}=F\cdot p=B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)}.
Для двух стержней рамки, суммарный крутящий момент равен:
- Mks=2⋅Mk=2⋅B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{k}s=2\cdot M_{k}=2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)}.
Практически (из-за того, что угловая ширина щётки α{\displaystyle \alpha } (в радианах) немного меньше угловой ширины зазора β{\displaystyle \beta }, между пластинами (ламелями) коллектора, чтобы источник питания не замыкался накоротко) четыре небольших части под кривой крутящего момента, равные:
- 2⋅B⋅I⋅L⋅r⋅∫0δ/2sin(w⋅t)d(w⋅t){\displaystyle 2\cdot B\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\delta /2}\sin(w\cdot t)d(w\cdot t)}, где δ=β−α{\displaystyle \delta =\beta -\alpha },
не участвуют в создании общего крутящего момента.
При числе витков в обмотке равном s{\displaystyle s}, крутящий момент будет равен:
- Ms=s⋅2⋅B⋅I⋅L⋅r⋅sin(w⋅t){\displaystyle M_{s}=s\cdot 2\cdot B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)}.
Наибольший крутящий момент будет при угле поворота рамки равном: π/2{\displaystyle \pi /2}, то есть при угле 90°.
При этом угле поворота рамки с током, вектора магнитных полей статора и ротора (рамки) будут перпендикулярны друг к другу, то есть под углом 90°. При угле поворота ротора (рамки) равном 180°, крутящий момент равен нулю (из-за нулевого плеча), но силы не равны нулю и это положение ротора (рамки), при отсутствии переключения тока, весьма устойчиво и подобно одному шагу в шаговом двигателе.
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой крутящего момента, делённой на длину периода (2⋅π){\displaystyle (2\cdot \pi )}:
- Mkrsr=(2⋅∫0πB⋅I⋅L⋅r⋅sin(w⋅t)d(w⋅t))/(2⋅π)=B⋅I⋅L⋅r⋅(∫0πsin(w⋅t)d(w⋅t))/π{\displaystyle Mkrsr=\left(2\cdot \int \limits _{0}^{\pi }B\cdot I\cdot L\cdot r\cdot \sin(w\cdot t)d(w\cdot t)\right)/(2\cdot \pi )=B\cdot I\cdot L\cdot r\cdot \left(\int \limits _{0}^{\pi }\sin(w\cdot t)d(w\cdot t)\right)/\pi }.
При s{\displaystyle s} витков в обмотке:
- Mkrsr=s⋅B⋅I⋅L⋅r⋅(∫0πsin(w⋅t)d(w⋅t))/π{\displaystyle Mkrsr=s\cdot B\cdot I\cdot L\cdot r\cdot \left(\int \limits _{0}^{\pi }\sin(w\cdot t)d(w\cdot t)\right)/\pi }.
Две рамки с током в однородном магнитном поле полюсов статора[править | править код]
Если на роторе машины установить вторую рамку, сдвинутую относительно первой на угол π/2{\displaystyle \pi /2}, то получится четырёхполюсный ротор.
Момент второй рамки:
- Mc=2⋅B⋅I⋅L⋅r⋅sin(ωt+π/2)=2⋅B⋅I⋅L⋅r⋅cos(ωt){\displaystyle M_{c}=2\cdot B\cdot I\cdot L\cdot r\cdot \sin(\omega t+\pi /2)=2\cdot B\cdot I\cdot L\cdot r\cdot \cos(\omega t)}.
Суммарный момент обеих рамок:
- Mk=Ms+Mc=2⋅B⋅I⋅L⋅r⋅(sin(ωt)+cos(ωt)){\displaystyle M_{k}=M_{s}+M_{c}=2\cdot B\cdot I\cdot L\cdot r\cdot (\sin(\omega t)+\cos(\omega t))}.
Таким образом получается, что крутящий момент зависит от угла поворота ротора, но неравномерность меньше, чем при одной рамке. Кроме этого добавляется самозапуск из любого положения ротора. При этом для второй рамки потребуется второй коллектор (щёточно-коллекторный узел). Оба узла соединяются параллельно, при этом переключение тока в рамках происходит в интервалах с наименьшим током в рамках, при последовательном соединении переключение тока в одной из рамок (разрыв цепи) происходит во время максимального тока в другой рамке. Практически, из-за того, что угловая ширина щётки α{\displaystyle \alpha } (в радианах) немного меньше угловой ширины зазора β{\displaystyle \beta } (в радианах) между пластинами коллектора (ламелями), восемь небольших частей под кривой крутящего момента, равных:
- 2⋅B⋅I⋅L⋅r∫0Δ/2sin(ωt)⋅d(ωt){\displaystyle 2\cdot B\cdot I\cdot L\cdot r\int \limits _{0}^{\Delta /2}\sin(\omega t)\cdot d(\omega t)}, где Δ=β−α{\displaystyle \Delta =\beta -\alpha },
не участвуют в создании общего крутящего момента.
Рамка с током в неоднородном магнитном поле полюсов статора[править | править код]
Если магнитное поле полюсов статора неоднородное и изменяется по отношению к стержням рамки по закону:
- B=Bm⋅sin(ω⋅t){\displaystyle B=B_{m}\cdot \sin(\omega \cdot t)},
то крутящий момент для одного стержня будет равен:
- M=Bm⋅sin(ω⋅t)⋅I⋅L⋅r⋅sin(ω⋅t)=Bm⋅I⋅L⋅r⋅(sin(ω⋅t))2{\displaystyle M=B_{m}\cdot \sin(\omega \cdot t)\cdot I\cdot L\cdot r\cdot \sin(\omega \cdot t)=B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}},
для двух стержней:
- Ms=2⋅Bm⋅I⋅L⋅r⋅(sin(ω⋅t))2{\displaystyle M_{s}=2\cdot B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}},
для рамки из s{\displaystyle s} витков:
- Mss=s⋅2⋅Bm⋅I⋅L⋅r⋅(sin(ω⋅t))2{\displaystyle M_{s}s=s\cdot 2\cdot B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}}.
В создании крутящего момента не участвуют четыре части под кривой крутящего момента равные:
- s⋅2⋅Bm⋅I⋅L⋅r⋅∫0δ/2(sin(ω⋅t))2d(ω⋅t).{\displaystyle s\cdot 2\cdot B_{m}\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\delta /2}(\sin(\omega \cdot t))^{2}d(\omega \cdot t).}
Без учёта короткозамкнутых щётками частей крутящего момента средний крутящий момент за один оборот (период) равен площади под интегральной кривой делённой на длину периода (2⋅π){\displaystyle (2\cdot \pi )}:
- Mkrsr=2⋅∫0πBm⋅I⋅L⋅r⋅(sin(ω⋅t))2d(ω⋅t)/(2⋅π)=Bm⋅I⋅L⋅r⋅∫0π(sin(ω⋅t))2d(ω⋅t)/π{\displaystyle Mkrsr=2\cdot \int \limits _{0}^{\pi }B_{m}\cdot I\cdot L\cdot r\cdot (\sin(\omega \cdot t))^{2}d(\omega \cdot t)/(2\cdot \pi )=B_{m}\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\pi }(\sin(\omega \cdot t))^{2}d(\omega \cdot t)/\pi }.
При s{\displaystyle s} витках в обмотке:
- Mkrsr=(s⋅Bm⋅I⋅L⋅r⋅∫0π(sin(ω⋅t))2d(ω⋅t))/π{\displaystyle Mkrsr=(s\cdot B_{m}\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\pi }(\sin(\omega \cdot t))^{2}d(\omega \cdot t))/\pi }.
Две рамки с током в неоднородном магнитном поле полюсов статора[править | править код]
Для второй (косинусной) рамки:
- sin(w⋅t+π/2)=cos(w⋅t){\displaystyle \sin(w\cdot t+\pi /2)=\cos(w\cdot t)};
крутящий момент от второй (косинусной) рамки будет равен:
- Mc=2⋅Bm⋅I⋅L⋅r⋅(cos(w⋅t))2{\displaystyle M_{c}=2\cdot B_{m}\cdot I\cdot L\cdot r\cdot (\cos(w\cdot t))^{2}},
суммарный крутящий момент от обеих рамок равен:
- Mk=Ms+Mc=2⋅Bm⋅I⋅L⋅r⋅((sin(w⋅t))2+(cos(w⋅t))2)=2⋅Bm⋅I⋅L⋅r{\displaystyle M_{k}=M_{s}+M_{c}=2\cdot B_{m}\cdot I\cdot L\cdot r\cdot ((\sin(w\cdot t))^{2}+(\cos(w\cdot t))^{2})=2\cdot B_{m}\cdot I\cdot L\cdot r},
то есть постоянен, и от угла поворота ротора не зависит.
Практически из-за наличия зазора восемь небольших частей, под кривой крутящего момента, равные:
- 2⋅Bm⋅I⋅L⋅r⋅∫0δ/2(sin(w⋅t))2d(w⋅t){\displaystyle 2\cdot B_{m}\cdot I\cdot L\cdot r\cdot \int \limits _{0}^{\delta /2}(\sin(w\cdot t))^{2}d(w\cdot t)} каждая,
в со
ru.wikipedia.org
Принцип действия и устройство электродвигателя
Любой электрический двигатель предназначен для совершения механической работы за счет расхода приложенной к нему электроэнергии, которая преобразуется, как правило, во вращательное движение. Хотя в технике встречаются модели, которые сразу создают поступательное движение рабочего органа. Их называют линейными двигателями.
В промышленных установках электромоторы приводят в действие различные станки и механические устройства, участвующие в технологическом производственном процессе.
Внутри бытовых приборов электродвигатели работают в стиральных машинах, пылесосах, компьютерах, фенах, детских игрушках, часах и многих других устройствах.
Основные физические процессы и принцип действия
На движущиеся внутри магнитного поля электрические заряды, которые называют электрическим током, всегда действует механическая сила, стремящаяся отклонить их направление в плоскости, расположенной перпендикулярно ориентации магнитных силовых линий. Когда электрический ток проходит по металлическому проводнику или выполненной из него катушке, то эта сила стремится подвинуть/повернуть каждый проводник с током и всю обмотку в целом.
На картинке ниже показана металлическая рамка, по которой течет ток. Приложенное к ней магнитное поле создает для каждой ветви рамки силу F, создающую вращательное движение.
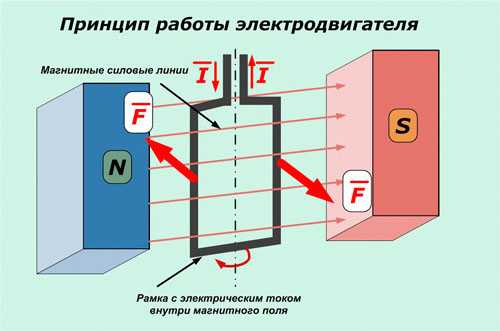
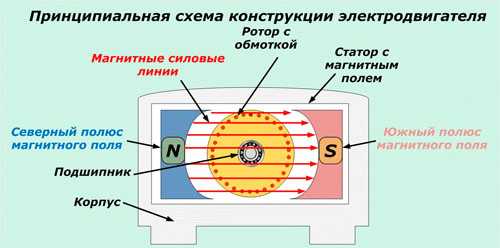
Это свойство взаимодействия электрической и магнитной энергии на основе создания электродвижущей силы в замкнутом токопроводящем контуре положено в работу любого электродвигателя. В его конструкцию входят:
обмотка, по которой протекает электрический ток. Ее располагают на специальном сердечнике-якоре и закрепляют в подшипниках вращения для уменьшения противодействия сил трения. Эту конструкцию называют ротором;
статор, создающий магнитное поле, которое своими силовыми линиями пронизывает проходящие по виткам обмотки ротора электрические заряды;
корпус для размещения статора. Внутри корпуса сделаны специальные посадочные гнезда, внутри которых вмонтированы внешние обоймы подшипников ротора.
Упрощенно конструкцию наиболее простого электродвигателя можно представить картинкой следующего вида.
При вращении ротора создается крутящий момент, мощность которого зависит от общей конструкции устройства, величины приложенной электрической энергии, ее потерь при преобразованиях.
Величина максимально возможной мощности крутящего момента двигателя всегда меньше приложенной к нему электрической энергии. Она характеризуется величиной коэффициента полезного действия.
По виду протекающего по обмоткам тока их подразделяют на двигатели постоянного или переменного тока. Каждая из этих двух групп имеет большое количество модификаций, использующих различные технологические процессы.
Электродвигатели постоянного тока
У них магнитное поле статора создается стационарно закрепленными постоянными магнитами либо специальными электромагнитами с обмотками возбуждения. Обмотка якоря жестко вмонтирована в вал, который закреплен в подшипниках и может свободно вращаться вокруг собственной оси.
Принципиальное устройство такого двигателя показано на рисунке.
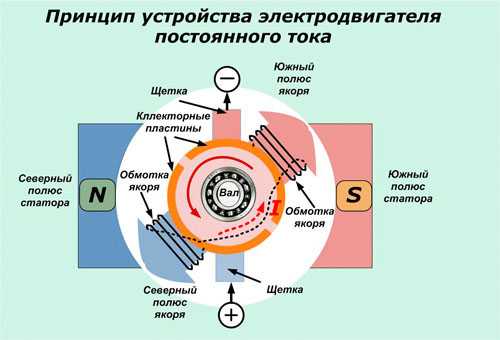
На сердечнике якоря из ферромагнитных материалов расположена обмотка, состоящая из двух последовательно соединенных частей, которые одним концом подключены к токопроводящим коллекторным пластинам, а другим скоммутированы между собой. Две щетки из графита расположены на диаметрально противоположных концах якоря и прижимаются к контактным площадкам коллекторных пластин.
На нижнюю щетку рисунка подводится положительный потенциал постоянного источника тока, а на верхнюю — отрицательный. Направление протекающего по обмотке тока показано пунктирной красной стрелкой.
Ток вызывает в нижней левой части якоря магнитное поле северного полюса, а в правой верхней — южного (правило буравчика). Это приводит к отталкиванию полюсов ротора от одноименных стационарных и притяжению к разноименным полюсам на статоре. В результате приложенной силы возникает вращательное движение, направление которого указывает коричневая стрелка.
При дальнейшем вращении якоря по инерции полюса переходят на другие коллекторные пластины. Направление тока в них изменяется на противоположное. Ротор продолжает дальнейшее вращение.
Простая конструкция подобного коллекторного устройства приводит к большим потерям электрической энергии. Подобные двигатели работают в приборах простой конструкции или игрушках для детей.
Электродвигатели постоянного тока, участвующие в производственном процессе, имеют более сложную конструкцию:
- обмотка секционирована не на две, а на большее количество частей;
- каждая секция обмотки смонтирована на своем полюсе;
- коллекторное устройство выполнено определенным количеством контактных площадок по числу секций обмоток.
В результате этого создается плавное подключение каждого полюса через свои контактные пластины к щеткам и источнику тока, снижаются потери электроэнергии.
Устройство подобного якоря показано на картинке.

У электрических двигателей постоянного тока можно реверсировать направление вращения ротора. Для этого достаточно изменить движение тока в обмотке на противоположное сменой полярности на источнике.
Электродвигатели переменного тока
Они отличаются от предыдущих конструкций тем, что электрический ток, протекающий в их обмотке, описывается по синусоидальному гармоническому закону. периодически изменяющему свое направление (знак). Для их питания напряжение подается от генераторов со знакопеременной величиной.
Статор таких двигателей выполняется магнитопроводом. Его делают из ферромагнитных пластин с пазами, в которые помещают витки обмотки с конфигурацией рамки (катушки).

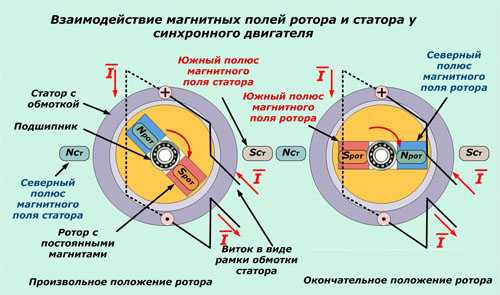
На картинке ниже показан принцип работы однофазного двигателя переменного тока с синхронным вращением электромагнитных полей ротора и статора.
В пазах статорного магнитопровода по диаметрально противоположным концам размещены проводники обмотки, схематично показанные в виде рамки, по которой протекает переменный ток.
Рассмотрим случай для момента времени, соответствующего прохождению положительной части его полуволны.
В обоймах подшипника свободно вращается ротор с вмонтированным постоянным магнитом, у которого ярко выражены северный «N рот» и южный «S рот» полюса. При протекании положительной полуволны тока по обмотке статора в ней создается магнитное поле с полюсами «S ст» и «N ст».
Между магнитными полями ротора и статора возникают силы взаимодействия (одноименные полюса отталкиваются, а разноименные — притягиваются), которые стремятся повернуть якорь электродвигателя из произвольного положения в окончательное, когда осуществляется максимально близкое расположение противоположных полюсов относительно друг друга.
Если рассматривать этот же случай, но для момента времени, когда по рамочному проводнику протекает обратная — отрицательная полуволна тока, то вращение якоря будет происходить в противоположную сторону.
Для придания непрерывного движения ротору в статоре делают не одну обмотку-рамку, а определенное их количество с таким учетом, чтобы каждая их них питалась от отдельного источника тока.
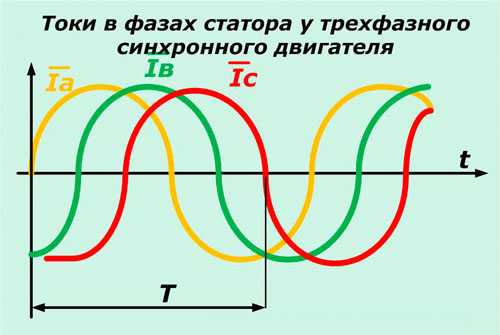
Принцип работы трехфазного двигателя переменного тока с синхронным вращением электромагнитных полей ротора и статора показан на следующей картинке.

В этой конструкции внутри магнитопровода статора смонтированы три обмотки А, В и С, смещенные на углы 120 градусов между собой. Обмотка А выделена желтым цветом, В — зеленым, а С — красным. Каждая обмотка выполнена такими же рамками, как и в предыдущем случае.
На картинке для каждого случая ток проходит только по одной обмотке в прямом или обратном направлении, которое показано значками «+» и «·».
При прохождении положительной полуволны по фазе А в прямом направлении ось поля ротора занимает горизонтальное положение потому, что магнитные полюса статора формируются в этой плоскости и притягивают подвижный якорь. Разноименные полюса ротора стремятся приблизиться к полюсам статора.
Когда положительная полуволна пойдет по фазе С, то якорь повернется на 60 градусов по ходу часовой стрелки. После подачи тока в фазу В произойдет аналогичный поворот якоря. Каждое очередное протекание тока в очередной фазе следующей обмотки будет вращать ротор.
Если к каждой обмотке подвести сдвинутое по углу 120 градусов напряжение трехфазной сети, то в них будут циркулировать переменные токи, которые раскрутят якорь и создадут его синхронное вращение с подведенным электромагнитным полем.
Эта же механическая конструкция успешно применяется в трехфазном шаговом двигателе. Только в каждую обмотку с помощью управления специальным контроллером (драйвером шагового двигателя) подаются и снимаются импульсы постоянного тока по описанному выше алгоритму.
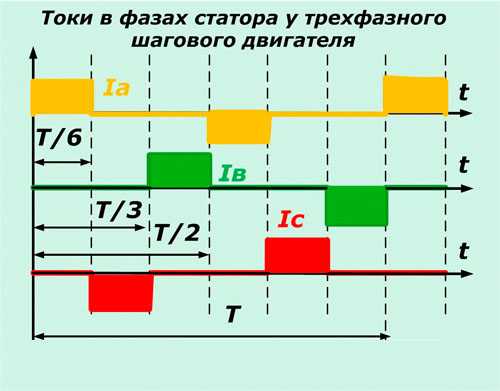
Их запуск начинает вращательное движение, а прекращение в определенный момент времени обеспечивает дозированный поворот вала и остановку на запрограммированный угол для выполнения определенных технологических операций.
В обеих описанных трехфазных системах возможно изменение направления вращения якоря. Для этого надо просто поменять чередование фаз «А»-«В»-«С» на другое, например, «А»-«С»-«В».
Скорость вращения ротора регулируется продолжительностью периода Т. Его сокращение приводит к ускорению вращения. Величина амплитуды тока в фазе зависит от внутреннего сопротивления обмотки и значения приложенного к ней напряжения. Она определяет величину крутящего момента и мощности электрического двигателя.
Эти конструкции двигателей имеют такой же статорный магнитопровод с обмотками, как и в ранее рассмотренных однофазных и трехфазных моделях. Они получили свое название из-за несинхронного вращения электромагнитных полей якоря и статора. Сделано это за счет усовершенствования конфигурации ротора.
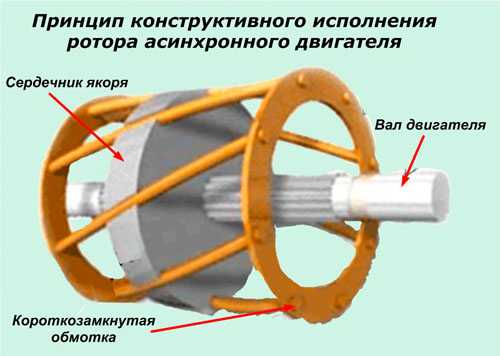
Его сердечник набран из пластин электротехнических марок стали с пазами. В них вмонтированы алюминиевые либо медные тоководы, которые по концам якоря замкнуты токопроводящими кольцами.
Когда к обмоткам статора подводится напряжение, то в обмотке ротора электродвижущей силой наводится электрический ток и создается магнитное поле якоря. При взаимодействии этих электромагнитных полей начинается вращение вала двигателя.
У этой конструкции движение ротора возможно только после того, как возникло вращающееся электромагнитное поле в статоре и оно продолжается в несинхронном режиме работы с ним.
Асинхронные двигатели проще в конструктивном исполнении. Поэтому они дешевле и массово применяются в промышленных установках и бытовой домашней технике.

Взрывозащищенный электродвигатель ABB
Многие рабочие органы промышленных механизмов выполняют возвратно-поступательное или поступательное движение в одной плоскости, необходимое для работы металлообрабатывающих станков, транспортных средств, ударов молота при забивании свай …
Перемещение такого рабочего органа с помощью редукторов, шариковинтовых, ременных передач и подобных механических устройств от вращательного электродвигателя усложняет конструкцию. Современное техническое решение этой проблемы — работа линейного электрического двигателя.
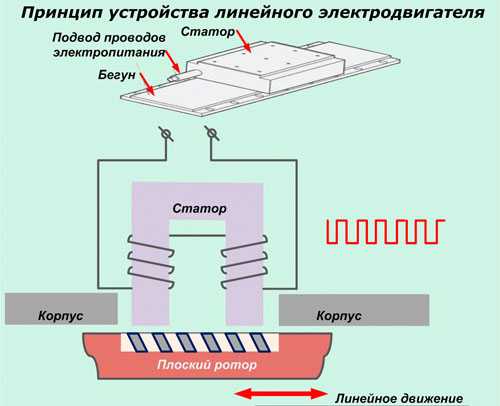
У него статор и ротор вытянуты в виде полос, а не свернуты кольцами, как у вращательных электродвигателей.
Принцип работы заключается в придании возвратно-поступательного линейного перемещения бегуну-ротору за счет передачи электромагнитной энергии от неподвижного статора с незамкнутым магнитопроводом определенной длины. Внутри него поочередным включением тока создается бегущее магнитное поле.
Оно воздействует на обмотку якоря с коллектором. Возникающие в таком двигателе силы перемещают ротор только в линейном направлении по направляющим элементам.
Линейные двигатели конструируются для работы на постоянном или переменном токе, могут работать в синхронном либо асинхронном режиме.
Недостатками линейных двигателей являются:
низкие энергетические показатели.
Основные понятия
Наиболее характерное магнитное явление — притяжение магнитом кусков железа — известно со времен глубокой древности. Ещё одной очень важной особенностью магнитов является наличие у них полюсов: северного (отрицательного) и южного (положительного). Противоположные полюса притягиваются, а одинаковые — отталкиваются друг от друга.
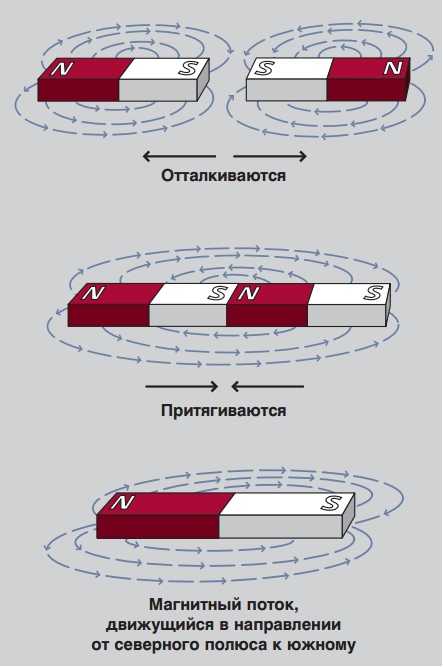
Магнитное поле можно условно изобразить линиями в виде магнитного потока, движущегося от северного полюса к южному. В некоторых случаях определить, где северный, а где южный полюс, достаточно сложно.
Вокруг проводника, при пропускании по нему электрического тока, создаётся магнитное поле. Это явление называется электромагнетизмом. Физические законы одинаковы для магнетизма и электромагнетизма.
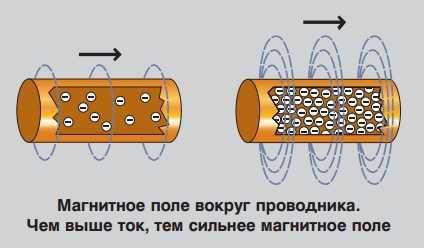
Магнитное поле вокруг проводников можно усилить, если намотать их на катушку со стальным сердечником. Когда проводник намотан на катушку, все линии магнитного потока, образуемого каждым витком, сливаются и создают единое магнитное поле вокруг катушки.
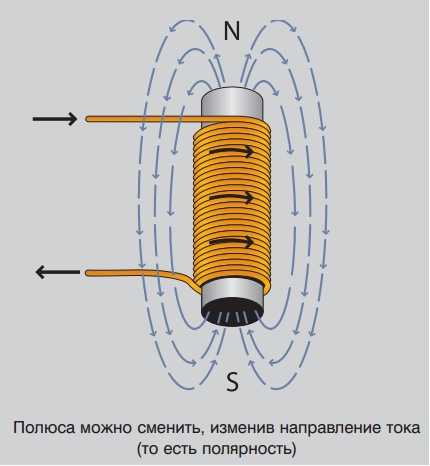
Чем больше витков на катушке, тем сильнее магнитное поле. Это поле имеет такие же характеристики, что и естественное магнитное поле, а, следовательно, у него тоже есть северный и южный полюса.
Вращение вала электродвигателя обусловлено действием магнитного поля. Основные части электродвигателя: статор и ротор.
Подвижная часть электродвигателя, которая вращается с валом электродвигателя, двигаясь вместе с магнитным полем статора.
Неподвижный компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.

Вращение под действием магнитного поля
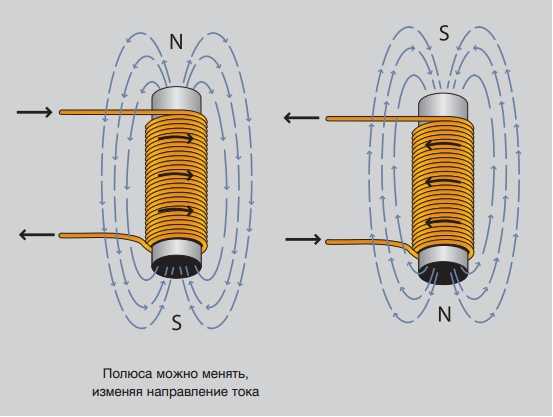
Преимуществом магнитных полей, которые создаются токопроводящими катушками, является возможность менять местами полюса магнита посредством изменения направления тока. Именно эта возможность смены полюсов и используется для преобразования электрической энергии в механическую.
Одинаковые полюса магнитов отталкиваются друг от друга, противоположные полюса — притягиваются. Можно сказать, что это свойство используется для создания непрерывного движения ротора с помощью постоянной смены полярности статора. Ротором здесь, является магнит, который может вращаться.
Чередование полюсов с помощью переменного тока
Полярность постоянно меняется с помощью переменного тока (AC). Далее мы увидим, как ротор заменяется магнитом, который вращается под действием индукции. Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём:
Под переменным током понимается электрический ток, периодически изменяющий свое направление в цепи так, что среднее значение силы тока за период равно нулю. Вращающееся магнитное поле можно создать с помощью трёхфазного питания. Это означает, что статор подсоединяется к источнику переменного тока с тремя фазами. Полный цикл определяется как цикл в 360 градусов. Это значит, что каждая фаза расположена по отношению к другой под углом в 120 градусов. Фазы изображаются в виде синусоидальных кривых, как представлено на рисунке.
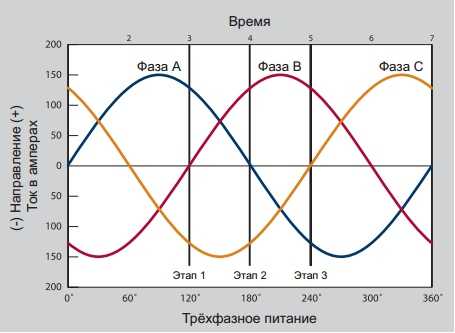
Трёхфазный переменный ток
Трёхфазное питание — это непрерывный ряд перекрывающихся напряжений переменного тока (AC).
На следующих страницах объясняется, как взаимодействуют ротор и статор, заставляя электродвигатель вращаться.

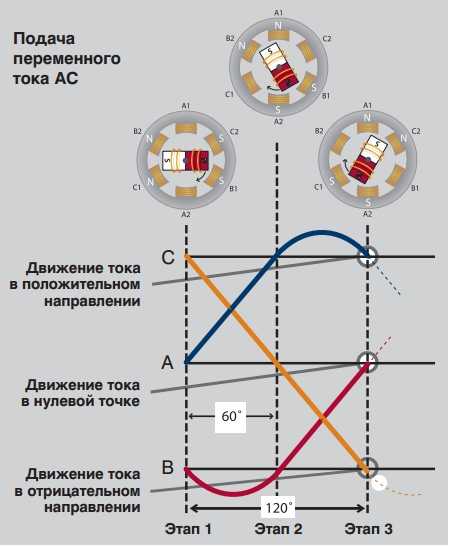
Для наглядности мы заменили ротор вращающимся магнитом, а статор — катушками. В правой части страницы приведено изображение двухполюсного трёхфазного электродвигателя. Фазы соединены парами: 1-й фазе соответствуют катушки A1 и A2, 2-й фазе — B1 и B2. а 3-й соответствуют C1 и C2. При подаче тока на катушки статора одна из них становится северным полюсом, другая — южным. Таким образом, если A1 — северный полюс, то A2 — южный.
Питание в сети переменного тока
Обмотки фаз A, B и C расположены по отношению друг к другу под углом в 120 градусов.

Количество полюсов электродвигателя определяется количеством пересечений поля обмотки полем ротора. В данном случае каждая обмотка пересекается дважды, что означает, что перед нами двухполюсный статор. Таким образом, если бы каждая обмотка появлялась четыре раза, это был бы четырехполюсный статор и т.д.
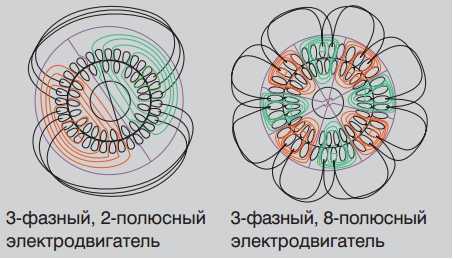
Когда на обмотки фаз подаётся электрический ток, вал электродвигателя начинает вращаться со скоростью, обусловленной числом полюсов (чем меньше полюсов, тем ниже скорость)
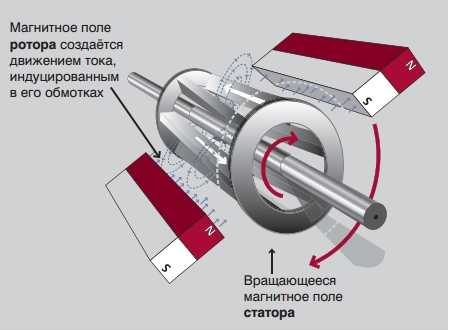
Ниже рассказывается о физическом принципе работы электродвигателя (как ротор вращается внутри статора). Для наглядности, заменим ротор магнитом. Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы. При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Начав вращение, магнит будет следовать за меняющимся магнитным полем статора. Поле статора меняется таким образом, чтобы поддерживалось вращение в одном направлении.
Ранее мы установили, как обыкновенный магнит вращается в статоре. В электродвигателях переменного тока AC установлены роторы, а не магниты. Наша модель очень схожа с настоящим ротором, за исключением того, что под действием магнитного поля ротор поляризуется. Это вызвано магнитной индукцией, благодаря которой в проводниках ротора наводится электрический ток.
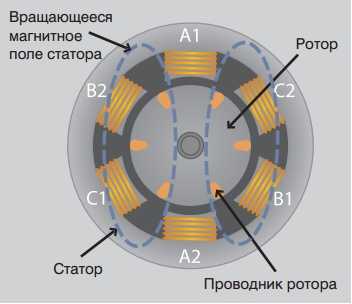
В основном ротор работает так же, как магнит. Когда электродвигатель включен, ток проходит по обмотке статора и создаёт электромагнитное поле, которое вращается в направлении, перпендикулярном обмоткам ротора. Таким образом, в обмотках ротора индуцируется ток, который затем создаёт вокруг ротора электромагнитное поле и поляризацию ротора.
В предыдущем разделе, чтобы было проще объяснить принцип действия ротора, заменив его для наглядности магнитом. Теперь заменим магнитом статор. Индукция — это явление, которое наблюдается при перемещении проводника в магнитном поле. Относительное движение проводника в магнитном поле приводит к появлению в проводнике так называемого индуцированного электрического тока. Этот индуцированный ток создаёт магнитное поле вокруг каждой обмотки проводника ротора. Так как трёхфазное AC питание заставляет магнитное поле статора вращаться, индуцированное магнитное поле ротора будет следовать за этим вращением. Таким образом вал электродвигателя будет вращаться. Электродвигатели переменного тока часто называют индукционными электродвигателями переменного тока, или ИЭ (индукционными электродвигателями).
Принцип действия
Индукционные электродвигатели состоят из ротора и статора.
Токи в обмотках статора создаются фазовым напряжением, которое приводит в движение индукционный электродвигатель. Эти токи создают вращающееся магнитное поле, которое также называется полем статора. Вращающееся магнитное поле статора определяется токами в обмотках и количеством фазных обмоток.
Вращающееся магнитное поле формирует магнитный поток. Вращающееся магнитное поле пропорционально электрическому напряжению, а магнитный поток пропорционален электрическому току.
Вращающееся магнитное поле статора движется быстрее ротора, что способствует индукции токов в обмотках проводников роторов, в результате чего образуется магнитное поле ротора. Магнитные поля статора и ротора формируют свои потоки, эти потоки будут притягиваться друг к другу и создавать вращающий момент, который заставляет ротор вращаться. Принципы действия индукционного электродвигателя представлены на иллюстрациях справа.
Таким образом, ротор и статор являются наиболее важными составляющими индукционного электродвигателя переменного тока. Они проектируются с помощью САПР (системы автоматизированного проектирования). Далее мы подробнее поговорим о конструкции ротора и статора.

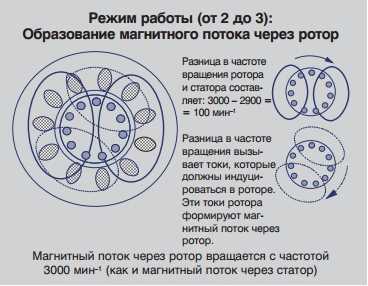
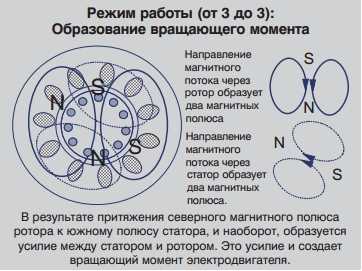
Статор электродвигателя
Статор — это неподвижный электрический компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых всё время меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
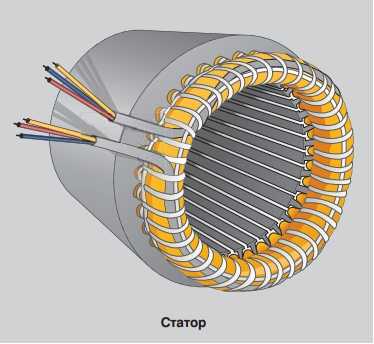
Все статоры устанавливаются в раму или корпус. Корпус статора электродвигателей Grundfos для электродвигателей мощностью до 22 кВт чаще всего изготавливается из алюминия, а для электродвигателей с большей мощностью — из чугуна. Сам статор устанавливается в кожухе статора. Он состоит из тонких пластин электротехнической стали, обмотанных изолированным проводом. Сердечник состоит из сотен таких пластин. При подаче питания переменный ток проходит по обмоткам, создавая электромагнитное поле, перпендикулярное проводникам ротора. Переменный ток (AC) вызывает вращение магнитного поля.
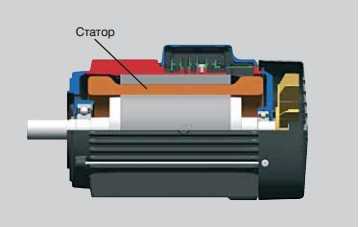
Изоляция статора должна соответствовать требованиям IEC 62114, где приведены различные классы защиты (по уровням температуры) и изменения температуры (AT). Электродвигатели Grundfos имеют класс защиты F, а при увеличении температуры — класс B. Grundfos производит 2-полюсные электродвигатели мощностью до 11 кВт и 4-полюсные электродвигатели мощностью до 5,5 кВт. Более мощные электродвигатели Grundfos закупает у других компаний, уровень качества продукции которых соответствует принятым в Grundfos стандартам. Для насосов, в основном, используются статоры с двумя, четырьмя и шестью полюсами, так как частота вращения вала электродвигателя определяет давление и расход насоса. Можно изготовить статор для работы с различными напряжениями, частотами и мощностями на выходе, а также для переменного количества полюсов.
Ротор электродвигателя
В электродвигателях используются так называемые «беличьи колеса» (короткозамкнутые роторы), конструкция которых напоминает барабаны для белок.
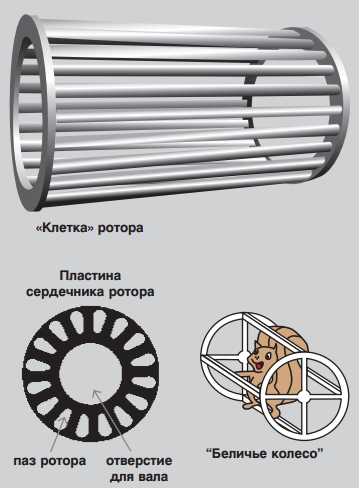
При вращении статора магнитное поле движется перпендикулярно обмоткам проводников ротора; появляется ток. Этот ток циркулирует по обмоткам проводников и создаёт магнитные поля вокруг каждого проводника ротора. Так как магнитное поле в статоре постоянно меняется, меняется и поле в роторе. Это взаимодействие и вызывает движение ротора. Как и статор, ротор изготовлен из пластин электротехнической стали. Но, в отличие от статора, с обмотками из медной проволоки, обмотки ротора выполнены из литого алюминия или силумина, которые выполняют роль проводников.

Асинхронные электродвигатели
В предыдущих разделах мы разобрали, почему электродвигатели переменного тока называют также индукционными электродвигателями, или электродвигателями типа «беличье колесо». Далее объясним, почему их ещё называют асинхронными электродвигателями. В данном случае во внимание принимается соотношение между количеством полюсов и числом оборотов, сделанных ротором электродвигателя.
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).
Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.
Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов.
Синхронная частота вращения для различного количества полюсов
Принцип действия электродвигателя
Электродвигателем называется устройство, принцип действия которого преобразование электрической энергии в механическую. Такое преобразование используется для запуска в работу всевозможных видов техники, начиная от самого простого рабочего оборудования и заканчивая автомобилями. Однако при всей полезности и продуктивности такого преобразования энергий, в данном свойстве есть небольшой побочный эффект, который проявляется в повышенном выделении тепла. Именно поэтому электрические двигатели оснащаются дополнительным оборудованием, которое способно охладить его и позволить работать в бесперебойном режиме.
Основные функциональные элементы
Любой электрический двигатель состоит из двух основных элементов, один из которых является неподвижным, такой элемент называется статором. Второй элемент является подвижным, эта часть двигателя называется ротором. Ротор электрического двигателя может быть выполнен в двух вариантах, а именно может быть короткозамкнутым и с обмоткой. Хотя последний тип на сегодняшний день является достаточно большой редкостью, поскольку сейчас повсеместно используются такие устройства, как частотные преобразователи .
Принцип действия электродвигателя основана на выполнении следующих этапов работы. Во время включения в сеть, в статоре начинает осуществлять вращение возникшее поле магнитного типа. Оно действует на обмотку статора, в которой при этом возникает ток индукционного типа. Согласно закону Ампера, ток начинает действовать на ротор, который под этим действием начинает свое вращение. Непосредственно частота вращения ротора напрямую зависит от того, какой силы действия возникает ток, а так же от того, какое количество полюсов при этом возникает.
Разновидности и типы
На сегодняшний день наиболее распространенными считаются двигатели, которые имеют магнитоэлектрический тип. Есть еще тип электродвигателей, которые называют гистерезисные, однако они не являются распространенными. Первый тип электродвигателей, магнитоэлектрического вида, могут подразделяться еще на два подтипа, а именно электродвигатели постоянного тока и двигатели переменного тока.
Первый вид двигателей осуществляет свою работу от постоянного тока, эти типы электродвигателей используются тогда, когда возникает необходимость регулировки скоростей. Данные регулировки осуществляются посредством изменений напряжения в якоре. Однако сейчас существует большой выбор всевозможных преобразователей частот, поэтому такие двигатели стали применяться все реже и реже.
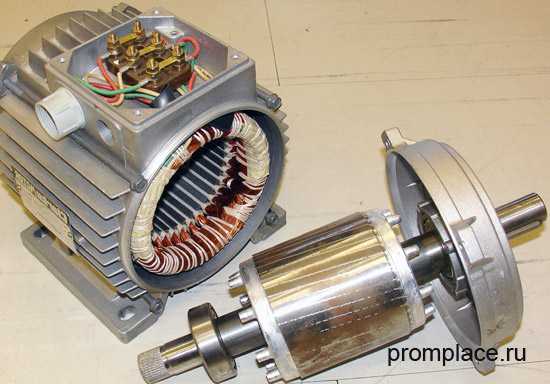
Двигатели переменного тока соответственно работают посредством действия тока переменного типа. Здесь так же имеется своя классификация, и двигатели делятся на синхронные и асинхронные. Их основным различием становится разница во вращении необходимых элементов, в синхронном движущая гармоника магнитов движется с той же скоростью, что и ротор. В асинхронных двигателях наоборот, ток возникает за счет разницы в скоростях движения магнитных элементов и ротора.
Благодаря своим уникальным характеристикам и принципам действия электродвигатели на сегодняшний день распространенны гораздо больше, чем скажем двигатели внутреннего сгорания, поскольку они обладают рядом преимуществ перед ними. Так коэффициент полезного действия электродвигателей является очень высоким, и может достигать почти 98%. Так же электродвигатели отличаются высоким качеством и очень долгим рабочим ресурсом, они не издают много шума, и во время работы практически не вибрируют. Большим преимуществом такого типа двигателей является то, что они не нуждаются в топливе, и как результат не выделяют в атмосферу никаких загрязняющих веществ. К тому их использование является намного более экономичным, по сравнению с двигателями внутреннего сгорания.
zelo.club
