
Все о частотных преобразователях
Частотные преобразователи – это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
Исходя из формулы n = (1 – S)60f/p где n – скорость вращения ротора, S – скольжение, f- частота питающей сети, p – количество пар полюсов.
Существует три способа регулирования скорости вращения асинхронного двигателя:
- – изменение скольжения. Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения.
 Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения. - – изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор. Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.
- – изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно. Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.

В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту. Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
17 часто задаваемых вопросов о преобразователе частоты и электродвигателе – Статьи
Дата публикации: 21.08.2019
В данной статье мы подобрали для вас ответы на наиболее часто задаваемые вопросы по работе электродвигателей и частотных преобразователей.
1. Что такое электромеханический привод?
Ответ: Электромеханический привод – это система, состоящая из электродвигателя, механического передаточного устройства, электрического силового преобразователя и электронного устройства управления, осуществляющая управляемое преобразование электрической энергии в энергию движения механического объекта.
2. Что такое преобразователь частоты?
Ответ: Преобразователь частоты – это устройство для управляемого питания электродвигателя.
3. В чем заключается назначение преобразователя частоты?
Ответ: Назначение преобразователя частоты – это управление моментом/скоростью вращения электродвигателя за счет изменения частоты и напряжения питания.
4. Что такое ШИМ?
Ответ: ШИМ (Широтно импульсная модуляция) – это метод получения регулируемого выходного напряжения путем изменения длительности коммутации.
5. Как согласуется выходное напряжение ПЧ с входным?
Ответ: Выходное напряжение может меняться от 0 до уровня входного напряжения ПЧ (возможна перегрузка в несколько процентов). Соответственно при питании ПЧ от сети 220В не возможно развить номинальный момент на двигателе подключенным по схеме питания 380В.
6. Как согласуется выходная частота ПЧ с номинальной входной?
Ответ: Выходная частота формируется посредством ШИМ и может меняться в диапазоне от 0 до 400 -590 Гц (в зависимости от модели ПЧ). В зависимости от выходной частоты ПЧ меняется скорость вращения вала двигателя.
7. Возможно ли управлять ПЧ однофазными двигателями?
Ответ: Нет.
8. Возможно ли управлять ПЧ с однофазным питанием, трехфазными двигателями?
Ответ: Да, до 2,2 кВт.
9. Основные плюсы использования преобразователей частоты?
Ответ: Их 2. Во-первых, экономия электроэнергии при работе электродвигателя. Во-вторых, реализация сложных технологических процессов за счет изменения частоты вращения приводов.
10. Какой принцип работы асинхронного двигателя с короткозамкнутым ротором?
Ответ: ПЧ создает вращающееся магнитное поле в статоре, а оно создает электрическое поле в короткозамкнутом роторе (принцип магнитной индукции).
11. От чего зависит номинальная скорость вращения ротора асинхронного двигателя с короткозамкнутым ротором?
Ответ: Она зависит от частоты питающего напряжения и количества пар полюсов и скольжения. Преобразователь частоты позволяет регулировать частоту питающего напряжения и тем самым скорость вращения вала ЭД.
12. Какое значение имеет скорость вращения вала электродвигателя при его работе от сети?
Ответ: Скорость равна номинальной частоте двигателя.
13. Какова скорость вращения вала электродвигателя при его работе от ПЧ?
Ответ: Скорость регулируется от ПЧ .
14. Как связан момент с током электродвигателя?
Ответ: Для двигателя с постоянными магнитами момент пропорционален току статора.
15: Какие существуют способы подключения обмоток двигателя?
Ответ: Треугольник, Звезда (изменяется номинальное напряжение и ток двигателя).
16: При подключении в звезду или треугольник будет больше номинальное линейное напряжение двигателя?
Ответ: Линейное напряжение будет больше для звезды (соответственно ток наоборот меньше).
17: Что такое скольжение?
Ответ: Скольжение – это разница между скоростью поля статора и частотой вращения ротора в процентах.
Смотрите так же:
Функция “Спящий режим” преобразователя частоты Danfoss FC-051 (Реализация на встроенном контроллере)
Управление частотным преобразователем Danfoss серии FC51 с панели оператора Weintek MT8121XE1WK
Для заказа преобразователя частоты перейдите в каталог по ссылке – VLT Micro Drive
Регулирование частоты вращения асинхронного двигателя
Общие сведения. Технологический процесс часто требует изменения частоты вращения исполнительного механизма. С этой целью широко применяются коробки скоростей, которые усложняют кинематику провода, вызывают вибрацию системы и увеличивают инерционность привода. Для повышения точности обработки и увеличения производительности целесообразно использовать регулировочные свойства двигателей. В асинхронных двигателях частота вращения определяется из равенства
Технологический процесс часто требует изменения частоты вращения исполнительного механизма. С этой целью широко применяются коробки скоростей, которые усложняют кинематику провода, вызывают вибрацию системы и увеличивают инерционность привода. Для повышения точности обработки и увеличения производительности целесообразно использовать регулировочные свойства двигателей. В асинхронных двигателях частота вращения определяется из равенства
где n1 = 60f 1 / р.
Из этого равенства следует, что изменять п
можно тремя способами: изменением частоты f1 , числа пар полюсов р и скольжения s. Частоту вращения ротора в принципе можно регулировать изменением напряжения питания U1. Однако с увеличением U1 появляется опасность превышения допустимой температуры нагрева двигателя, а с уменьшением U1 уменьшается перегрузочная способность двигателя.
Однако с увеличением U1 появляется опасность превышения допустимой температуры нагрева двигателя, а с уменьшением U1 уменьшается перегрузочная способность двигателя.Регулирование изменением частоты (частотное регулирование). Этим способом изменение частоты вращения ротора п осуществляется за счет изменения частоты питающего напряжения
Для изменения частоты f1 могут применяться машинные и полупроводниковые (тиристорные) преобразователи. На рис. 3.36 показана схема машинного преобразователя. Асинхронный двигатеь АД с постоянной частотой вращает генератор постоянного тока Г, работающий в системе генератор — двигатель. Генератор Г питает двигатель Д постоянного тока, частота вращения которого регулируется током возбуждения генератора Г и двигателя Д.
Генератор Г питает двигатель Д постоянного тока, частота вращения которого регулируется током возбуждения генератора Г и двигателя Д.
Двигатель вращает с различными частотами синхронный генератор СГ, частота выходного напряжения которого f
1 = n1p/60 изменяется. В результате АД изменяет частоту вращения рабочего механизма. Этот способ позволяет плавно изменять частоту вращения АД. Недостатками способа являются высокая стоимость преобразователя, низкий КПД установки из-за многократного преобразования энергии, сравнительно небольшой диапазон регулирования.Частотное тиристорное регулирование. Значительно больший эффект при частотном регулировании достигается применением тиристорных преобразователей. На рис. 3.37 показана схема такого регулирования. Тиристорный преобразователь ТП питается от трехфазной сети с постоянными значениями напряжения U1 и частоты f1.
На выходе преобразователя получается постоянное варьируемое напряжение U1c. Это напряжение подается на блок инвертора И, на выходе которого появляется регулируемое переменное напряжение U1v при частоте f1v. Напряжение U1v подается на асинхронный двигатель АД.
Для автоматизации процесса регулирования необходимо дополнительно иметь блок задания частоты БЗЧ и блоки управления напряжением УН и частотой УЧ.
Для поддержания точного значения скорости целесообразно иметь обратную связь по частоте с выхода АД на блок задания частоты.
Регулирование изменением числа полюсов.
Асинхронный двигатель не имеет явно выраженных полюсов и поэтому его число полюсов зависит от схемы соединения катушек в обмотках каждой фазы статора.
Если, например, обмотка фазы состоит из двух катушек, то при их последовательном соединении число пар полюсов р = 2, а при параллельном соединении р = 1. Начала и концы катушек выводятся на клеммы щитка, так что переключение катушек можно делать на работающем двигателе. Можно разместить в пазах статора две независимые обмотки, каждая из которых создает разное число пар полюсов, например, р = 1 и р = 2.
Одна из обмоток может, например, соединяться в одинарную звезду, а другая – в двойную звезду (рис. 3.38, а и б). Можно также переключать треугольник в двойную звезду (рис. 3.39,
В результате двигатель будет трехскоростной. В принципе можно разместить на статоре две обмотки, каждая из которых имеет две скорости, такая машина будет четырехскоростной. Однако размещение нескольких обмоток увеличивает габариты и стоимость машины. Поэтому лучше применять одну обмотку с переключением на четыре скорости. При этом можно получить синхронные скорости 3000 / 1500 / 1000 / 500 или 1500 / 1000 / 750 / 500 об/мин или другие комбинации.
В принципе можно разместить на статоре две обмотки, каждая из которых имеет две скорости, такая машина будет четырехскоростной. Однако размещение нескольких обмоток увеличивает габариты и стоимость машины. Поэтому лучше применять одну обмотку с переключением на четыре скорости. При этом можно получить синхронные скорости 3000 / 1500 / 1000 / 500 или 1500 / 1000 / 750 / 500 об/мин или другие комбинации.
Регулирование изменением числа полюсов является ступенчатым регулированием. Механические характеристики при разном числе пар полюсов показаны на рис. 3.40. Этот способ регулирования экономичен, рабочая часть характеристик жесткая, но данный способ применяется лишь в случаях, не требующих плавного регулирования, например в станках, где ступенчатое регулирование применяется с целью уменьшения числа ступеней в коробках скоростей, вентиляторах, насосах и др.
Регулирование частоты вращения изменением подводимого напряжения. При уменьшении напряжения U момент двигателя уменьшается пропорционально U2. В связи с этим изменяются механические характеристики, уменьшается критический момент Mк , при постоянном моменте сопротивления увеличивается скольжение и уменьшается частота вращения ротора.
В связи с этим изменяются механические характеристики, уменьшается критический момент Mк , при постоянном моменте сопротивления увеличивается скольжение и уменьшается частота вращения ротора.
Уменьшать напряжение U можно включением в цепь статора реостатов (рис. 3.41, а), автотрансформаторов (рис. 3.41,6) или регулируемых дросселей (рис. 3.41, в). При включении реостатов в них теряется значительная мощность (RI2).
Автотрансформаторы дают возможность регулировать частоту вращения лишь вручную.
Регулируемые дроссели позволяют автоматизировать этот процесс, для чего их цепь
подмагничивания включается в систему автоматического регулирования.
Данный метод применяется только у двигателей малой мощности, так как при этом способе регулирования уменьшается КПД двигателя, уменьшается критический момент, а диапазон регулирования сравнительно небольшой.
Регулирование изменением сопротивления цепи ротора R2 (реостатное регулирование). Этот способ применим только для двигателей с фазным ротором. Такое регулирование связано с изменением скольжения s в соответствии с зависимостью п = п1 (1 — s).
Из формул ( 3.26) и ( 3.28) следует, что с увеличением R2 угол наклона механической характеристики увеличивается, а критический момент остается постоянным (Mк = const).
На рис. 3.42 представлено семейство характеристик п(М) при различных R2 . Если момент нагрузки Mc = const, то частота вращения n с увеличением R2 падает, а скольжение увеличивается.
Этот способ регулирования имеет ряд недостатков: дополнительные потери энергии в реостате, механические характеристики становятся мягкими, относительно малый диапазон регулирования.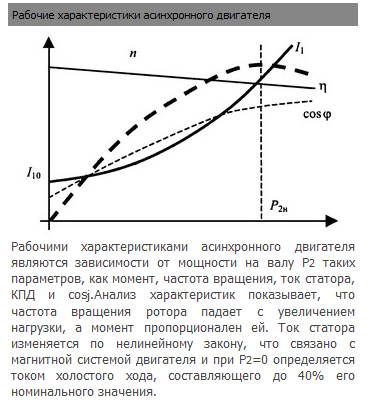
Зависимость скольжения, мощности и вращающего момента асинхронных машин от частоты сети при переходном режиме работы Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
УДК 621.313.333: 621.317.3
ЗАВИСИМОСТЬ СКОЛЬЖЕНИЯ, МОЩНОСТИ И ВРАЩАЮЩЕГО МОМЕНТА АСИНХРОННЫХ МАШИН ОТ ЧАСТОТЫ СЕТИ ПРИ ПЕРЕХОДНОМ РЕЖИМЕ РАБОТЫ
Бекиров Э.А., Воскресенская С.Н., Абибуллаев А.Н.
Физико-технический институт ФГАОУ ВО «КФУ им. В. И. Вернадского»
Симферополь, ул. Киевская, 181, е-mail: [email protected]
Аннотация. Проведен анализ изменения скольжения и вращающего момента асинхронных двигателей при изменении частоты питающей сети. Для асинхронных машин приведены выражения для расчета активной и реактивной мощностей. Уменьшение частоты ведет к уменьшению рабочего скольжения и к росту суммарной реактивной мощности и вращающего электромагнитного момента. Показаны расчетные и экспериментальные данные колебания и биения напряжения в сети при изменении частоты. Также рассмотрено влияние величины скольжения на электромагнитный вращающий момент.
Уменьшение частоты ведет к уменьшению рабочего скольжения и к росту суммарной реактивной мощности и вращающего электромагнитного момента. Показаны расчетные и экспериментальные данные колебания и биения напряжения в сети при изменении частоты. Также рассмотрено влияние величины скольжения на электромагнитный вращающий момент.
Ключевые слова: асинхронная машина, скольжение, вращающий момент, частота, мощность.
ВВЕДЕНИЕ
Одним из главных условий обеспечения нормальной работы электродвигателей является питание их электроэнергией, параметры которой соответствуют определенным требованиям к ее качеству.
Основные показатели качества электроэнергии (ПКЭ) связаны с такими параметрами, как отклонения частоты и напряжения, колебания напряжения, несинусоидальность и несимметрия напряжения [1]. Напряжение сети, в свою очередь, зависит от реактивной мощности [2, 3] и при ее нехватке возникает необходимость в дополнительном регулировании. Изменение ПКЭ сети приводит к протеканию переходных процессов в асинхронных машинах, которые используются как для генерации электроэнергии, так и в качестве потребителей [4 – 6].
Напряжение сети, в свою очередь, зависит от реактивной мощности [2, 3] и при ее нехватке возникает необходимость в дополнительном регулировании. Изменение ПКЭ сети приводит к протеканию переходных процессов в асинхронных машинах, которые используются как для генерации электроэнергии, так и в качестве потребителей [4 – 6].
Во избежание длительного нарушения нормальной работы электродвигателей основные ПКЭ не должны выходить за пределы своих нормальных значений, а в послеаварийных режимах – за пределы определенных максимальных значений.
АНАЛИЗ ПУБЛИКАЦИЙ
При протекании переходных процессов в энергосети существенно могут меняться ПКЭ.
Жесткие требования стандарта к отклонениям частоты питающего напряжения обусловлены ее значительным влиянием на режимы работы электрооборудования, ход технологических процессов производства и, как следствие, технико-экономические показатели работы промышленных предприятий. То есть, предприятия терпят убытки, которые могут быть выражены в виде двух составляющих:
То есть, предприятия терпят убытки, которые могут быть выражены в виде двух составляющих:
– Электромагнитная составляющая ущерба (уменьшение электромагнитной индукции и выработки двигателей) обусловлена увеличением потерь активной мощности в электрических сетях и ростом потребления активной и реактивной мощностей. Известно, что снижение частоты на 1% увеличивает потери в электрических сетях на 2% [7].
– Технологическая составляющая ущерба вызвана в основном недовыпуском промышленными предприятиями своей продукции и стоимостью дополнительного времени работы предприятия для выполнения задания.
Согласно экспертным оценкам значение технологического ущерба на порядок выше электромагнитного. Оборудование любого предприятия должно работать в режиме, способствующем энергосбережению [8 – 10].
Отклонения частоты отрицательно влияют на работу электронной техники: изменение на величину более +0,1 Гц приводит к яркостным геометрическим фоновым искажениям
телевизионного изображения; если ее значение лежит в диапазоне от 49,9 до 49,5 Гц, это влечет за собой почти четырехкратное увеличение допустимого размаха телевизионного сигнала по сравнению со значением новой помехи [11].
Пониженная частота электрической сети влияет на срок службы оборудования, содержащего элементы со сталью (электродвигатели, трансформаторы, реакторы со стальным магнитопроводом), за счет увеличения тока намагничивания в таких аппаратах и дополнительного нагрева стальных сердечников. Например, отклонение частоты влияет на надежность и долговечность работы электродвигателей, а также на их тепловой режим. Кроме того, для асинхронных и синхронных двигателей тепловой режим зависит не только от величины напряжения, но и от степени загрузки.
Анализ работы предприятий с непрерывным циклом производства показал, что большинство основных технологических линий оборудовано механизмами с постоянными и вентиляторными моментами сопротивлений, а их приводами служат асинхронные двигатели. Частота вращения роторов двигателей пропорциональна изменению частоты сети, а производительность технологических линий зависит от частоты вращения двигателя. В связи с этим целесообразно выявить ее влияние на момент и мощность.
В связи с этим целесообразно выявить ее влияние на момент и мощность.
Наиболее чувствительны к понижению частоты двигатели собственных нужд электростанций. Результатом такого изменения параметров сети является уменьшение их производительности, что сопровождается снижением располагаемой мощности генераторов и частоты (имеет место лавина частоты) из-за дальнейшего дефицита активной мощности.
Такие электропотребители, как лампы
накаливания, печи сопротивления, дуговые
электрические печи на колебание частоты практически не реагируют.
МАТЕРИАЛЫ И МЕТОДЫ ИССЛЕДОВАНИЙ
Целью исследования является анализ параметров асинхронных машин при отклонении частоты сети от номинального значения. Задачи
Задачи
включают: получение зависимостей скорости изменения скольжения и вращающего момента двигателя от частоты; анализ изменения мощности; рассмотрение случаев возникновения колебаний и биений напряжения в энергосистемах при отклонении частоты.
Используемые методы исследований: математический анализ, составление
дифференциальных уравнений, экспериментальные измерения параметров и графические построения.
РЕЗУЛЬТАТЫ И ИХ АНАЛИЗ
Изменение частоты электроэнергии при неизменном напряжении U1 = иноы = const для питания асинхронного электродвигателя приводит к изменению потока Фт и соответствующему изменению тока ротора I2 и нагрузочной составляющей тока статора.
Если принять U1 « Е1, то э. cos W2
cos W2
(4)
При уменьшении частоты магнитный поток и ток холостого хода 10 увеличиваются, причем ток 10 из-за насыщения стали магнитопровода возрастает быстрее, чем магнитный поток. Уменьшение частоты / на 10% вызывает увеличение тока 10 на 20-30%. Ток 10 является практически реактивным, это приводит к снижению коэффициента мощности двигателя. С увеличением частоты / пропорционально возрастает частота вращения. Магнитный поток Фм уменьшается обратно пропорционально частоте. Согласно формуле (4) это приводит к резкому увеличению тока 12. При неизменном нагрузочном моменте увеличение частоты повышает опасность нарушения устойчивости двигателя, так как снижается максимальный момент двигателя пропорционально квадрату частоты /2.
Характеристики асинхронного двигателя при частотах питающего напряжения, отличающихся от номинального значения, зависят от соотношения между напряжением сети и частотой /1. г, + (х, + С, • х2)2]}
г, + (х, + С, • х2)2]}
(5)
где ш1 – число фаз в обмотке статора;
= 2 • п • /1/р –
угловая частота вращения магнитного поля
статора;
С1 – коэффициент, равный У1/Е1;
71 – активное сопротивление обмотки статора;
х-
– реактивное сопротивление обмотки
статора;
х2 – реактивное сопротивление обмотки ротора в схеме замещения асинхронного двигателя.
При Сх=1 (для упрощенной схемы замещения с вынесенным получаем
намагничивающим контуром),
М = +
‘ %ах —
тл • U2
{4^/1^+г1 + Уг12 + (х1+х2)2]} ‘
(6)
а пренебрегая величиной 71 ввиду его малого значения, имеем
М
тах —
+
т1 • Ul • р
=+
т
U12 •р
4 • л • • (х1 + х2) 8 • л • /i2 • (L1 + i’2)
=+
C^Uj2
/12
(7)
где С – постоянная величина.
При изменении частоты /1 изменяется максимальный момент, то есть отношение максимального момента Мтиж к нагрузочному моменту Мном. Для устойчивой работы двигателя необходимо обеспечить перегрузочную способность Мтах/Мном > (1,7 – 2).
Характеристики зависимости величины электромагнитного момента в относительных единицах М;/Мном от частоты ротора /2 при различных значениях частоты питающего напряжения /1 и законе регулирования и,//, = const приводятся в литературе [12].
Схемы замещения асинхронного двигателя представлены на рисунке 1.
р
ri jXi
Ui
jXt
а)
jX2
г/ S
P
U,
t-
jXs
/YYV
jX,
б)
г/ s
H
Рис. ,
,
(12)
то при подстановке (11) в (12) получаем после преобразований
и, = —
Б +]’х—)
(Г1+]х1) +
2/Б+](Х2 +
,(13)
(Ш0-Ш2)
где 5 =- — скольжение ротора
ш0
асинхронного двигателя относительно поля статора, вращающегося с угловой скоростью ш0.
Выражение (10) можно получить их схемы замещения (рис. 1, а), пользуясь соотношением
шо • Мэл = 1р-—. (14)
(14)
Пренебрегая активным сопротивлением обмотки статора (г-1) вследствие его малого значения, выражение электромагнитного момента приобретает вид
М =— •
ГпБ
ш0 (Х1 + х—С1)2б2 + с—г— ‘ (15)
Максимум характеристики Мэл = [(б) наступает при скольжении, равном критическому
(16)
Р Х-1 + Х2С1
и определяется выражением
и— 1
М = —–
элтах щ 2С1(Х1 + Х2С1) ‘
Для рисунка 1, б
х5 =Х1+ х2, (18) Ъ
, (19)
(17)
М.
_ щ 1
эл.тах _ „ • ‘
ш0 2Х8
(20)
При ш0 = 2п[1; хБ = 2п[Ь
Мч
8п2[2Ь
(21)
Уменьшение частоты ведет к увеличению Мэлтах, к уменьшению рабочего скольжения и к росту суммарной реактивной мощности.
2
2
с
и?
Частота вращающегося магнитного поля в статоре зависит от частоты питающего напряжения
сети. На рисунке 2 показана зависимость частоты вращения поля статора от частоты напряжения сети.
На рисунке 2 показана зависимость частоты вращения поля статора от частоты напряжения сети.
n1 1600 1500 1400 1300 1200 1100 1000
38
40
42
44
46
48
50
f1, Гц
Рис. 2. Зависимость частоты вращающегося магнитного поля статора ni от частоты /, напряжения сети Fig. 2. Dependence of the frequency of rotating magnetic field of the stator ni on the frequency /, of the network voltage
Скольжение асинхронной машины, работающей в режиме двигателя, изменяется от нуля до единицы. A/ /i /1 /1
A/ /i /1 /1
(23)
Найдем производную скольжения s по частоте /,
ds d/
‘(i-Af) 1
d/
/12
(24)
Из уравнения (24) видно, что скорость изменения скольжения при изменении частоты имеет обратно пропорциональную квадратичную зависимость. Построим график данной зависимости (рисунок 3).
ds/df 0,00073 0,00068 0,00063 0,00058 0,00053 0,00048 0,00043 0,00038
38
40
42
44
46
48
50
f1
Рис. – индуктивное сопротивление заторможенного ротора.
– индуктивное сопротивление заторможенного ротора.
Реактивное сопротивление обмотки ротора
х2 = • L2 = 2ro?/1L2 = s • x2fc
(27)
и при 5 = 0, Мэл = 0; при 5 = 1, Мэл = Мпуск; при 5 = 5кр, Мэл = Мтах.
Чтобы определить максимальный момент, продифференцируем вращающий момент Мэм, описываемый выражением (26), по скольжению 5 и приравняем результат к нулю
dM
d5
3 2
■у • ‘ -у . ‘V
12__’ 2 Х2У
ЭЛ — г ц2 54
= °Ми1
2
(G2)2+xb)
(28)
Так как скольжение sk = то
* I2K
Mmai = «
1
2 x
(29)
Величина максимального вращающего момента не зависит от активного сопротивления цепи ротора, при этом при увеличении активного
сопротивления максимальный вращающий момент будет смещаться в область больших скольжений. С уменьшением частоты сети /1 будет увеличиваться критическое скольжение, максимальный вращающий момент также будет смещаться в область больших скольжений.
С уменьшением частоты сети /1 будет увеличиваться критическое скольжение, максимальный вращающий момент также будет смещаться в область больших скольжений.
Из формулы (25) видно, что для регулирования частоты вращения асинхронного двигателя можно изменять частоту питающего напряжения (использование частотных преобразователей).
Мощность асинхронного двигателя напрямую зависит от вращающего момента, следовательно, с увеличением вращающего момента будет расти и мощность. В двигательном режиме максимальный момент существенно снижается при уменьшении частоты ввиду возрастающего влияния падения напряжения на активное сопротивление статора, что приводит к уменьшению э.д.с. Е1 и магнитного потока двигателя. В генераторном режиме максимальный момент с понижением частоты возрастает, при этом магнитный поток машины увеличивается. Такие явления в генераторном режиме нежелательны, так как при малых частотах резко возрастает электромагнитный момент, что может привести к поломке вала машины.
Рассмотрим активные и реактивные мощности асинхронной машины. На рисунке 4 приведена эквивалентная схема замещения.
Рис. 4. Эквивалентная схема замещения при расчете мощностей Fig 4. Equivalent chart of substitution at the calculation of powers
Реактивная мощность
выражениями:
Г Çad = ÇM + çs ;
y2
определяется
(30)
Çs = 3 • /s • xs ,
где Çad – суммарная реактивная мощность;
– мощность, связанная с намагничивающим
током;
– мощность от полей рассеяния в статоре и
роторе;
– ток холостого хода. •s2
•s2
п = 3 • I2 • х = —1—
VS j ‘S AS г)2 i 7 7 ‘
R2 + x2 • s2
следовательно, s
Qs = Pad~ .
S,
(32)
(33)
кр
Активная и реактивная мощности асинхронной машины зависят от изменения частоты питающего напряжения. Снижение частоты уменьшает рабочее
скольжение, увеличивается суммарная реактивная мощность.
При генерации электрической энергии в общую энергосистему необходимо обеспечивать требования качества электрической энергии по
напряжению UreH — ^энергосети; freH fceju> фген
фсети. При несоблюдении этих условий в электроэнергетической системе могут возникать модулированные колебания (рис. 5) и даже биения (рис. 6). Графики приведены для функции f = U1 sinш1Ь + U1 sinш21. Причем на рис. 5 синусоида с напряжением U1 = 380 В и частотами 50 Гц и 49 Гц, а на рис. 6 синусоида с аналогичным напряжением, но частотами 50 Гц и 45 Гц.
При несоблюдении этих условий в электроэнергетической системе могут возникать модулированные колебания (рис. 5) и даже биения (рис. 6). Графики приведены для функции f = U1 sinш1Ь + U1 sinш21. Причем на рис. 5 синусоида с напряжением U1 = 380 В и частотами 50 Гц и 49 Гц, а на рис. 6 синусоида с аналогичным напряжением, но частотами 50 Гц и 45 Гц.
Рис. 5. Возникновение модулированных колебаний при изменении частоты Fig. 5. Origin of the modulated vibrations at the change of frequency
Рис. 6. Возникновение биений при изменении частоты Fig. 6. Origin of beatings at the change of frequency
Электроэнергетические службы,
обеспечивающие работу энергосистем с соблюдением требуемых нормативных данных по качеству электрической энергии, внимательно следят за изменением характеристик при подключении электрогенерирующих устройств и станций к общей системе, так как они могут генерировать напряжение с отличающимися частотами и фазами. При отключениях в общей энергосистеме частота напряжений малых генерирующих станций уменьшается и может падать до 38 Гц и ниже, при этом энергоагрегаты либо переводятся на электропитание собственных нужд, либо в худшем случае выходят из строя.
При отключениях в общей энергосистеме частота напряжений малых генерирующих станций уменьшается и может падать до 38 Гц и ниже, при этом энергоагрегаты либо переводятся на электропитание собственных нужд, либо в худшем случае выходят из строя.
На рисунке 7 показаны биения напряжений и токов на энергоагрегатах генерирующей станции в Крыму. При аварийных режимах необходимо их
отключение либо автоматическое частотное регулирование
Частота в первый момент времени составила 46,97 Гц, а затем продолжила снижаться и в течение 1,6 секунды достигла критического значения 38,07 Гц. При этом напряжение так же снизилось. Так как при подобных условиях невозможно было провести регулировку, то это привело к отключению энергоблока.
Для обеспечения лучшего качества электрической энергии необходима
энергонезависимость Крыма, так как любые аварии на достаточно протяженном маршруте передачи электроэнергии приведут к возникновению модуляций. Крым почти на 80% обеспечивается за счет внешних мощностей. Это приводит к тому, что на настоящий момент нет собственных
Крым почти на 80% обеспечивается за счет внешних мощностей. Это приводит к тому, что на настоящий момент нет собственных
электростанций, способных обеспечить потребителей от энергосистемы для стабилизации
балансирование по частоте. Таким образом, в работы. аварийных ситуациях потребуется отключение
Файл:RECON492.206 Объект:SIM_TEC рекон 492 дата процесса: 03/12/2014 время процесса:08:31:54.597 с
Рис. 7. Биения напряжений и токов на энергоагрегатах генерирующей станции
Fig. 7. Beatings of voltages and currents on the power unit of the generating station
ВЫВОДЫ
Таким образом, в работе получены зависимости скорости изменения скольжения и вращающего момента асинхронного двигателя при изменении частоты питающей сети, приведены выражения для расчета мощности асинхронных машин. Активная и реактивная мощности зависят от частоты питающего напряжения по следующему алгоритму: снижение приводит к уменьшению рабочего скольжения, увеличению суммарной реактивной мощности и момента вращения. При переходных процессах колебания и биения напряжения могут привести к необходимости отключения энергоагрегатов от сети.
Активная и реактивная мощности зависят от частоты питающего напряжения по следующему алгоритму: снижение приводит к уменьшению рабочего скольжения, увеличению суммарной реактивной мощности и момента вращения. При переходных процессах колебания и биения напряжения могут привести к необходимости отключения энергоагрегатов от сети.
СПИСОК ЛИТЕРАТУРЫ
1. Семёнов А.С., Матул Г.А., Хазиев Р.Р., Шевчук В.А., Черенков Н.С. Анализ показателей качества электрической энергии при работе асинхронного двигателя от трёхфазного источника
питания // Фундаментальные исследования. 2014. № 9-6. С. 1210 – 1215.
2. Филюшов Ю.П., Филюшов В.Ю. Управление асинхронной машиной в условиях минимума реактивной мощности // Электротехника. 2014. № 2. С. 15 – 20.
3. Симаков Г.М., Филюшов Ю.П. Управление асинхронной машиной тягового электропривода в условиях минимизации реактивной мощности // Вестник транспорта Поволжья. 2015. № 2 (50). С. 39 – 46.
Симаков Г.М., Филюшов Ю.П. Управление асинхронной машиной тягового электропривода в условиях минимизации реактивной мощности // Вестник транспорта Поволжья. 2015. № 2 (50). С. 39 – 46.
4. Лустенберг Г.Е. Расчет электромеханических переходных процессов в трехфазной асинхронной машине с применением свободного программного обеспечения // Транспортная инфраструктура Сибирского региона. 2013. Т. 1. С. 259 – 263.
5. Ким К.И., Ким К.К. Переходные процессы в асинхронной машине. Санкт-Петербург: Издательство ОМ-Пресс, 2013. 90 с.
6. Христосенков С.А., Чуйко А.Д. Исследование переходных процессов протекающих в асинхронной машине // Транспортная инфраструктура Сибирского региона. 2015. Т. 2. С. 421 – 425.
7. Астахов Ю.Н., Веников В.А., Ежков В.В. Электроэнергетические системы в примерах и
иллюстрациях. Учебное пособие для вузов / под ред. В.А. Веникова. М.: Энергоатомиздат, 1983. 504 с.
Учебное пособие для вузов / под ред. В.А. Веникова. М.: Энергоатомиздат, 1983. 504 с.
8. Дейнего В., Дуюнов Д., Иванов В. Повышение энергоэффективности асинхронных двигателей вторичного рынка как способ энергосбережения // Электрик. 2015. № 5. С. 30 – 35.
9. Цопа Н.В., Малахова В.В., Ковальская Л.С. О необходимости нормативного регулирования современной энергосберегающей политики в строительном комплексе // Строительство и техногенная безопасность. 2017. № 6 (58). С. 91 – 98.
10. Цопа Н. Особенности управления энергосбережением в инвестицонно-строительном комплексе // Строительство и техногенная безопасность. 2016. № 2 (54). С. 54 – 59.
11. Вольдек А.И. Электрические машины. Учебник для студентов ВТУЗ. Изд. 2-е, перераб. и доп. – Л.: Энергия, 1974. – 840 с.
12. Брускин Д.Э., Зорохович А.Е., Хвостов В.С. Электрические машины и микромашины. Учебник для вузов. 2-е изд., перераб. и доп. М.: Высшая школа, 1981. 432 с.
Брускин Д.Э., Зорохович А.Е., Хвостов В.С. Электрические машины и микромашины. Учебник для вузов. 2-е изд., перераб. и доп. М.: Высшая школа, 1981. 432 с.
REFERENCES
1. Semyonov A.S., Matul G.A., Haziev R.R., Shevchuk V.A., Cherenkov N.S. Analysis of the quality of electrical energy during the operation of an induction motor from a three-phase power source. Fundamental’nye issledovaniya. 2014. No. 9-6, рр. 1210 – 1215. (In Russian).
2. Filyushov Yu.P., Filyushov V.Yu. Control of an asynchronous machine in conditions of minimum reactive power. Ehlektrotekhnika. 2014. No. 2, pp. 15 -20. (In Russian).
3. Simakov G.M., Filyushov Yu.P. Control of an asynchronous machine of traction electric drive in conditions of minimizing reactive power. Vestnik transporta Povolzh’ya. 2015. No. 2 (50), pp. 39 – 46. (In Russian).
2 (50), pp. 39 – 46. (In Russian).
4. Lustenberg G.E. Calculation of electromechanical transients in a three-phase asynchronous machine using free software. Transportnaya infrastruktura Sibirskogo regiona. 2013. No. 1, pp. 259 – 263. (In Russian).
5. Kim K.I., Kim K.K. Perekhodnye processy v asinhronnoj mashine [Transients in an asynchronous machine]. St. Petersburg: Izdatel’stvo OM-Press. 2013. 90 p.
6. Hristosenkov S.A., CHujko A.D. Investigation of transients in an asynchronous machine. Transportnaya infrastruktura Sibirskogo regiona. 2015. No. 2, pp. 421
– 425. (In Russian).
7. Astahov YU.N., Venikov V.A., Ezhkov V.V. EHlektroehnergeticheskie sistemy v primerah i illyustraciyah. Uchebnoe posobie dlya vuzov [Electric power systems in examples and illustrations. Textbook for high schools] / red. V.A. Venikov. Moscow: EHnergoatomizdat. 1983. 504 p.
Textbook for high schools] / red. V.A. Venikov. Moscow: EHnergoatomizdat. 1983. 504 p.
8. Dejnego V., Dujunov D., Ivanov V. Increase of the energoefficiency of asynchronous engines of the second market as method of energy-savings. Jelektrik. 2015, No. 5, pp. 30 – 35. (in Russian).
9. Copa N.V., Malahova V.V., Koval’skaya L.S. On the need for regulatory regulation of modern energy-saving policies in the construction sector. Stroitel’stvo i tekhnogennaya bezopasnost’. 2017. No. 6 (58), pp. 91 -98. (in Russian).
10. Copa N. Features of energy saving management in the investment and construction complex. Stroitel’stvo i tekhnogennaya bezopasnost’. 2016. No. 2 (54), pp. 54
– 59. (in Russian).
11. Vol’dek A.I. EHlektricheskie mashiny. Uchebnik dlya studentov VTUZ [Electric machine. A textbook for students of technical colleges]. – EHnergiya. 1974. 840 p.
Uchebnik dlya studentov VTUZ [Electric machine. A textbook for students of technical colleges]. – EHnergiya. 1974. 840 p.
12. Bruskin D.Eh., Zorohovich A.E., Hvostov V.S. EHlektricheskie mashiny i mikromashiny. Uchebnik dlya vuzov { Electric machines and micromachines. Textbook for universities]. Moscow: Vysshaya shkola, 1981. 432 p.
DEPENDENCE OF SLIDING, POWER, AND ROTATING MOMENT OF ASYNCHRONOUS MACHINES FROM THE NETWORK FREQUENCY IN TRANSITION MODE OF OPERATION
Bekirov E.A., Voskresenskaya S.N.,. Abibullaev A.N
Summary The analysis of the sliding and rotating moment changes of asynchronous motors at the change of the supply network frequency is carried out. For asynchronous machines, expressions for the calculation of active and reactive power are given. The decrease in frequency leads to a decrease in the working sliding and to an increase in the total reactive power and rotating moment. The calculated and experimental data of the voltage fluctuation and beating in the network at the frequency change are shown. The effect of the sliding magnitude on the electromagnetic rotating moment is also considered.
The calculated and experimental data of the voltage fluctuation and beating in the network at the frequency change are shown. The effect of the sliding magnitude on the electromagnetic rotating moment is also considered.
Key words: asynchronous machine, sliding, rotating moment, frequency, power.
Асинхронный двигатель и двигатель постоянного тока, чем они отличаются
Асинхронный двигатель и двигатель постоянного тока, чем они отличаются
Двигатель — устройство, преобразующее какой-либо вид энергии в механическую работу
Асинхронные двигатели — это двигатели, в процессе работы которых под нагрузкой наблюдается явление скольжения, то есть «отставание» вращения ротора от вращения магнитного поля статора. Другими словами, вращение ротора происходит не синхронно с вращением намагниченности статора, а асинхронно по отношению к этому движению. Вот почему такого рода двигатели называются асинхронными (не синхронными) двигателями.
В большинстве случаев, произнося словосочетание «асинхронный двигатель», имеют ввиду именно бесколлекторный двигатель переменного тока. Величина скольжения асинхронного двигателя может быть разной в зависимости от нагрузки, а также от параметров питания и способа управления токами обмотки статора.
Если мы имеем дело с обычным двигателем переменного тока, наподобие АИР712А, то при синхронной частоте вращения магнитного поля в 3000 оборотов в минуту, в условиях номинальной механической нагрузки на валу в 750 ватт, мы будем иметь реальную частоту вращения 2840 оборотов в минуту, а значит величина скольжения составит 0,053.
Это нормальное явление для асинхронного двигателя. И на справочной табличке мы не увидим круглых цифр оборотов, вроде 3000 или 1500, вместо них там будет указано 2730 или 1325. Вместо 1000 может быть написано например 860, несмотря на то, что магнитное поле во время работы двигателя вращается с частотой 1000 оборотов в минуту, как и должно быть в электрической машине с 3 парами магнитных полюсов, предназначенной для питания переменным током частотой 50 Гц.
Что касается двигателей постоянного тока, то в большинстве случаев так называют коллекторные двигатели, на скорость вращения ротора у которых влияет не частота тока, а его средняя величина. Датчик скорости может помочь электронной системе управления установить правильную величину тока для получения заданной скорости вращения, однако связь тока и оборотов здесь будет отнюдь не линейной, так как при разной нагрузке токи разной величины дадут очень разные частоты вращения ротора.
На роторе двигателя постоянного тока может располагаться многосекционная обмотка возбуждения или постоянные магниты. Но сегодня ротор с магнитами характерен скорее для шаговых двигателей, которые тоже относятся к двигателям постоянного тока, однако коллекторно-щеточных узлов не имеют. Как вариант разновидности конструкции мотора постоянного тока — магниты на статоре, а обмотка — на роторе.
Так или иначе, асинхронный бесколлекторный двигатель имеет мощную рабочую обмотку на статоре, которая в процессе работы разогревается от прохождения по ней рабочего тока, и передает тепло на корпус двигателя. Поэтому и обмотку и корпус двигателя необходимо все время активно охлаждать.
Поэтому и обмотку и корпус двигателя необходимо все время активно охлаждать.
В связи с этой особенностью, большинство асинхронных двигателей по умолчанию имеют на своих валах крыльчатки вентиляторов, а на корпусах – выступы, вдоль которых вентилятор, как через радиатор, гонит свежий воздух, охлаждая таким образом статор. Поэтому, если перед вами двигатель, на валу которого установлен вентилятор (обычно под крышкой, закрепленной на корпусе двигателя), вдоль корпуса имеются ребра (как на радиаторе), а на шильдике указана конкретная величина оборотов в минуту и величины переменного напряжения 220/380 — пред вами типичный асинхронный двигатель переменного тока.
В двигателях постоянного тока, с коллекторно-щеточными узлами и с многосекционными многовитковыми обмотками на якарях, выведенными на ламели коллектора, в качестве рабочих обмоток выступают – и обмотка статора, и обмотка ротора (якоря).
Здесь фактически получается, что рабочая обмотка как-бы разделена на две части: рабочий ток идет и через якорную обмотку, и через статорную обмотку, поэтому проблема нагрева только статора отсутствует, и вентилятор здесь не нужен.
Для охлаждения достаточно вентиляционных отверстий, через которые можно разглядеть ротор с якорной обмоткой на нем. Поэтому, если перед вами двигатель с коллекторно-щеточным узлом, где коллектор имеет множество ламелей (блестящих пластинок) с выводами от обмоток, и вентилятора словно бы и не предусмотрено — перед вами двигатель постоянного тока.
Статор двигателя постоянного тока может представлять собой набор постоянных магнитов. Большинство двигателей постоянного тока, рассчитанных на сетевое напряжение, будут легко работать и от переменного тока (пример такого универсального мотора – мотор болгарки).
Ранее ЭлектроВести писали, что с 7 по 17 марта 2019 года в выставочном центре Palexpo состоится Женевский автосалон. Всего ожидается свыше 100 мировых и европейских премьер!
По материалам: electrik.info.
Преобразователь частоты для электродвигателя
30.10.2017
Тематика: Полезная информация
Введение
Существует немало технологических операций, нуждающихся в регулировании угловых скоростей приводных валов механизмов. Традиционно эта задача решалась двумя путями:
Традиционно эта задача решалась двумя путями:
- применением механических многоскоростных редукторов для ступенчатого регулирования скорости, либо вариаторов для плавного регулирования;
- использованием электродвигателей постоянного тока совместно с регуляторами уровня питающего напряжения.
Регулирование угловой скорости ротора, основанное на изменении передаточного числа механической трансмиссии, характеризуется снижением общего КПД передачи. Это объясняется высоким уровнем механических потерь в редукторе, подверженном к тому же, интенсивному износу.
Двигатели постоянного тока представляют собой достаточно сложные и дорогие машины. Наличие коллекторного механизма со щёточным аппаратом, предъявляет повышенные требования к их обслуживанию и снижает надёжность.
Компания Овердрайв-Электро предлагает частотно-регулируемые приводы ABB со склада в Минске:
Принцип частотного регулирования
В основе частотного регулирования двигателя переменного тока лежит взаимосвязь угловой скорости, с которой вращается поле статора с частотой напряжения питания. Это означает, что изменение частотной характеристики напряжения статора приводит к пропорциональному изменению угловой скорости вращающегося ротора. Угловая скорость, или частота вращающегося поля статора асинхронного электрического двигателя выражается следующим соотношением:
Это означает, что изменение частотной характеристики напряжения статора приводит к пропорциональному изменению угловой скорости вращающегося ротора. Угловая скорость, или частота вращающегося поля статора асинхронного электрического двигателя выражается следующим соотношением:
ω0 = 2πf1/р,
где f1 — значение частоты напряжения, питающего обмотку статора, р — количество полюсных пар статорной обмотки.
Из приведенной формулы следует, что совершая изменение значения частоты подводимого к двигателю напряжения, можно плавно изменять значение угловой скорости (частоты) вращающегося поля статора, что приведёт к изменению частоты вращения ротора электродвигателя.
Данный принцип позволяет использовать в регулируемых приводах наиболее технологичные, простые и надёжные асинхронные двигатели, имеющие короткозамкнутый ротор. Благодаря высоким технико-экономическим показателям систем частотного регулирования происходит их активное внедрение в сферу промышленной и бытовой техники.
Устройство преобразователя частоты.
На рисунке 1 показана структурная схема, иллюстрирующая устройство преобразователя частоты (ПЧ).
Рис.1 Преобразователь частоты
Сетевое питающее напряжение промышленной частоты 50 герц поступает на вход выпрямителя (В), представляющего собой обычную мостовую диодную сборку. На выходе выпрямителя установлен Г — образный LC фильтр, выполняющий функции сглаживания пульсаций, которые присутствуют в выпрямленном напряжении.
Основной частью преобразователя является инвертор (И), осуществляющий преобразование постоянного напряжения в трёхфазную систему напряжений синусоидальной формы с регулируемой частотой и амплитудой. Ключевыми элементами инвертора служат мощные IGBT транзисторы, которые коммутируются сигналами, генерируемыми в системе импульсно — фазового управления. Система управления транзисторами, формирующими выходное напряжение, которое поступает на статор асинхронного двигателя (АД), основана на принципе ШИМ — широтно-импульсной модуляции. Сигнал управления представляет собой чередование импульсов напряжения с изменяемой скважностью.
Сигнал управления представляет собой чередование импульсов напряжения с изменяемой скважностью.
Примечание. Скважность — это оценочная характеристика периодического импульсного сигнала, рассчитываемая как отношение периода чередования сигнала к длительности импульса. То есть, величина скважности показывает, какую часть периода занимают импульсы. При изменении скважности изменяется соотношение длительностей импульсов и промежутков между ними.
Следует обратить внимание на одну интересную особенность частотных преобразователей. На рисунке 1 показан преобразователь, подключенный к трёхфазной сети. Существуют модели преобразователей, питающихся от однофазной сети, при этом, на выходе инвертора формируется всё та же трёхфазная система. Разница между трёхфазными и однофазными частотными преобразователями заключается только в качестве напряжения на выходе выпрямителя. Трёхфазный выпрямительный мост создаёт меньший уровень пульсаций напряжения, по этой причине, однофазное выпрямление предъявляет повышенные требования к параметрам LC фильтра.
Применение частотных преобразователей
Сегодня трудно найти область, где не нашли своего применения частотно-регулируемые приводы асинхронных электродвигателей.
На крупных блочных электрических станциях частотные регуляторы осуществляют регулирование подачи топлива в котлы, гибко адаптируя работу энергоблоков к изменяющемуся режиму работы энергосистемы. В этом качестве частотные приводы функционируют как исполнительные звенья автоматизированной системы управления технологическими процессами электростанции.
Частотное регулирование приводов мощных вентиляторов промышленных систем позволяет автоматически поддерживать оптимальные условия их работы при изменении внутренних и внешних факторов, экономя при этом электрическую энергию и продлевая ресурс оборудования.
Большую финансовую экономию принесло внедрение частотных регуляторов в городские системы водоснабжения. Рабочее давление в водоводах питьевого назначения ранее поддерживалось в основном путём оперирования задвижками. Это приводило к неэффективной работе насосного оборудования, повышенному расходу энергии и износу. Насосы, оснащённые частотным приводом способны гибко реагировать на изменение расхода воды в системе и изменяя частоту вращения поддерживать необходимое давление.
Это приводило к неэффективной работе насосного оборудования, повышенному расходу энергии и износу. Насосы, оснащённые частотным приводом способны гибко реагировать на изменение расхода воды в системе и изменяя частоту вращения поддерживать необходимое давление.
Применение частотных регуляторов не обошло стороной и область бытовой электротехники. Все современные стиральные машины и пылесосы оснащены частотным приводом. Это позволило отказаться от редукторов и ремённых приводов и повысить экономичность работы домашних агрегатов.
Характеристики асинхронного двигателя ~ Электропривод
К энергетическим характеристикам асинхронного двигателя относятся КПД двигателя(η) коэффициент мощности (cosφ) и скольжение S.
коэффициент полезного действия (η) вычисляется как отношение полезной мощности на валу двигателя Р2 кВт, к активной мощности, потребляемой двигателем из сети Р1 кВт;
η = Р2/ Р1 коэффициент мощности (cos(φ)вычисляется как отношение потребляемой активной мощности Р1 кВт, к полной мощности, потребляемой из сети S1 кВА;
По ГОСТ Р. 51677-2000 асинхронные двигатели общепромышленного назначения делятся на двигатели с нормальным КПД и двигатели с повышенным КПД. У асинхронных двигателей с повышенным КПД, суммарные потери не меньше, чем на 20%, чем у двигателей с нормальным КПД такой же мощности и частоты вращения. Коэффициенты мощностей (cosφ) асинхронных двигателей определены в ГОСТ.Р 51677. Значения КПД и cosφ конкретного асинхронного двигателя можно узнать по каталогу или по шильдику.
51677-2000 асинхронные двигатели общепромышленного назначения делятся на двигатели с нормальным КПД и двигатели с повышенным КПД. У асинхронных двигателей с повышенным КПД, суммарные потери не меньше, чем на 20%, чем у двигателей с нормальным КПД такой же мощности и частоты вращения. Коэффициенты мощностей (cosφ) асинхронных двигателей определены в ГОСТ.Р 51677. Значения КПД и cosφ конкретного асинхронного двигателя можно узнать по каталогу или по шильдику.
Причем КПД и cosφ асинхронного двигателя определяются и нагрузкой машины. В справочниках по электрическим машинам можно увидеть эти зависимости.
Линейный ток двигателя можно определить исходя из номинальной полезной мощность (Р2, кВт), номинального напряжения (UH, В ), КПД (η) и cosφ.
Мощность, потребляемая из сети можно определить из формулы:
Скольжение вычисляется как разницу между номинальной n1 и синхронной nc частотой вращения двигателя, приведенной к номинальной скорости двигателя n1:
Номинальную частоту вращения ротора n1 или скольжение (S, %)можно определить по каталогу двигателя или прочесть на его шильдике.
Механические и пусковые характеристики асинхронного двигателя
Одной из основных характеристик асинхронного двигателя, является механическая характеристика. Механической характеристикой называют зависимость скорости вращения или скольжения от вращающего момента на валу двигателя. Она позволяет сравнить и согласовать механические свойства двигателя и рабочего механизма. Соответственно, зависимость скорости вращения или скольжения от тока статора называют электромеханической характеристикой.
Механическая характеристика асинхронного двигателя определяет зависимость момента на валу двигателя от скольжения, при сохранении неизменного напряжении и частоты питающей сети
Пусковые характеристики определяют величину пускового моментаMп, минимального момента Мmin, максимального или критического момента Мкр., пускового тока Iп или пусковой мощности Sп или их отношениями. Диаграмма момента, приведенного к номинальному моменту, от скольжения получила название относительной механической характеристики.
Номинальный вращающий момент можно определить по формуле:
P2н- номинальная мощность , кВт,
N1н- номинальная частота вращенияю, об/мин.
Пусковые характеристики асинхронного двигателя
Пусковые характеристики асинхронного двигателя регламентирует ГОСТ 28327 ( МЭК 60034 — 12), а их значения приводятся в каталогах. Стандартные асинхронные двигатели могут иметь два исполнения по механическим характеристикам, которые определены в ГОСТ 28327 и МЭК 60034-12:
N – двигатели с нормальный моментом;
Н –двигатели с повышенным моментом.
Двигатели , изготовленные в исполнении N, рассчитывают на два последовательных пуска с остановкой между пусками из холодного состояния или на один пуск из нагретого состояния, после работы при номинальной нагрузке.
Момент сопротивления нагрузки при запуске прямо пропорционален квадрату частоты вращения и равняется номинальному моменту при номинальной частоте вращения, а значение внешнего момента инерции, γ , кг*м2, не должно превышать рассчитанного по формуле
где Р-номинальная мощность двигателя, кВт;
р — число пар полюсов;
При построении характеристики предполагается, что момент сопротивления нагрузки остается постоянным и равен номинальному моменту. Кроме того он не зависит от частоты вращения. Значение же внешнего момента инерции не превышаетт 50% величины, полученной по приведенной выше формуле.
Кроме того он не зависит от частоты вращения. Значение же внешнего момента инерции не превышаетт 50% величины, полученной по приведенной выше формуле.
Механические характеристики асинхронных мшин зависят в том числе и от типа ротора, его номинальной мощности, и от числа пар полюсов.
Ввиду того, что разность в значениях момента при соответствующих скольжениях у двигателей с различным числом пар полюсов невелика, и не превышает значения поля допуска на моменты. Различные механические характеристики для разных исполнений асинхронных двигателей показаны на рис
1 — исполнение N; 2 — исполнение Н; 3 — с повышенным скольжением. Механические характеристики группы двигателей, одной серии, или ее части обычно укладываются в некоторую зону. По средней линии этой зоны можно составить групповую механическую характеристику. Величина зоны групповой характеристики меньше поля допуска двигателей на моменты.
двигатель – зависимость между частотой и током
2-й вопрос: Куда он девается?
Энергия, отправляемая в катушки индуктивности (и конденсаторы!), Временно сохраняется. Затем он течет в обратном направлении, возвращаясь к источнику питания. Во время 1/2 цикла переменного тока в идеале вся энергия возвращается, а катушка или конденсатор потребляют ноль.
Затем он течет в обратном направлении, возвращаясь к источнику питания. Во время 1/2 цикла переменного тока в идеале вся энергия возвращается, а катушка или конденсатор потребляют ноль.
Итак, если мы подключим катушку индуктивности к батарее, ток катушки возрастет, и энергия будет накапливаться в магнитном поле. Затем мы внезапно меняем местами соединения катушек.Это меняет направление тока, которое затем плавно падает до нуля. Магнитное поле схлопывается, и энергия течет обратно по цепи, чтобы «перезарядить» батарею. Наконец, как только ток упадет до нуля, отключите аккумулятор. Это симуляция одного полупериода переменного тока. В идеале вся энергия, которая шла в индуктор, теперь текла обратно и снова возвращалась в батарею.
Настоящий переменный ток: подключите идеальную индуктивность с нулевым сопротивлением к генератору переменного тока, и генератор отправит энергию на индуктор, а затем снова всасывает ее обратно, дважды за цикл.(Это дважды за цикл, потому что энергия отправляется и обратно во время положительной фазы, а также отправляется и обратно во время отрицательной фазы. )
)
Практические эффекты: катушка и соединительные провода нагреваются из-за своего сопротивления. Мы получили бы 100% возвращенной энергии, только если бы катушка и провода были сверхпроводящими. Настоящие катушки также действуют как резисторы, как электрические нагреватели. Кроме того, ваш ротор динамо-машины переменного тока будет вибрировать с частотой 120 Гц при попытке привести в действие большую катушку индуктивности. Дважды за цикл генератор видит нагрузку, большой ток, затем видит «антинагрузку» от обратного тока, и его вал получает толчок вперед от возвращаемой энергии.Средний поток энергии равен нулю, но между динамо-машиной и удаленной катушкой индуктивности «колеблется» значительная часть энергии.
Чтобы устранить этот эффект, добавьте к катушке индуктивности «настроечный конденсатор» и отрегулируйте его значение для резонанса при 60 Гц, 400 Гц, какой бы ни была частота вашей системы переменного тока. Теперь «всплеск энергии» происходит только между катушкой индуктивности и конденсатором, в то время как динамо-машина видит постоянную нагрузку переменного тока.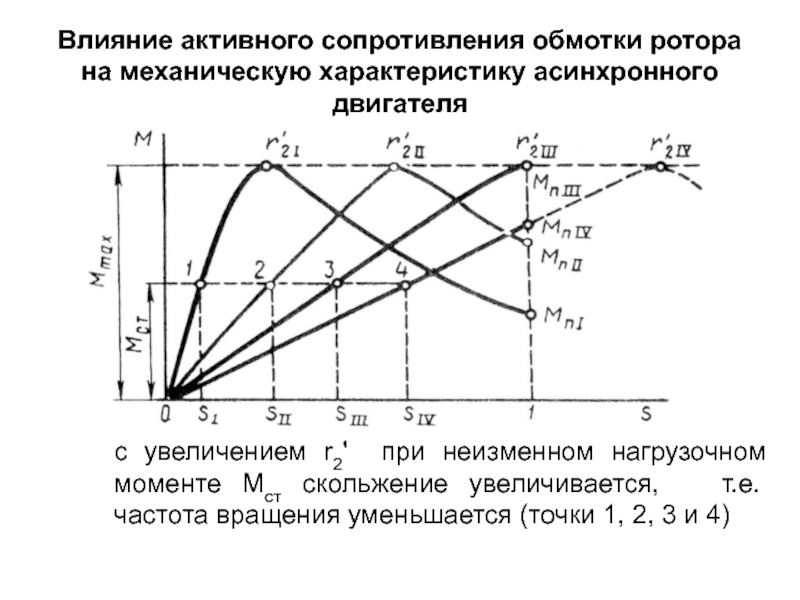
Связь между скоростью, частотой и напряжением в асинхронном двигателе?
Наша компания планирует запрограммировать частотно-регулируемый привод для управления скоростью трехфазного асинхронного двигателя.Если мы изменим амплитуду (напряжение), что произойдет с частотой? Какая частота для какой амплитуды подходит?Асинхронный двигатель работает с частотой питающего его источника. Можно изменять скорость, изменяя применяемую частоту.
Для работы двигателю необходим магнитный поток в железе, точнее говоря, в зазоре между ротором и статором. Ротор обычно вращается со скоростью, немного меньшей, чем скорость вращения поля статора (которая зависит от частоты).Эта разница в скорости известна как скольжение и зависит от нагрузки (примечание: двигатели переменного тока с постоянными магнитами ротора работают без проскальзывания (синхронно)). Скольжение заставляет магнитный поток прорезать обмотки ротора, заставляя ток течь в роторе. Частота протекания тока равна частоте скольжения и никогда не может быть нулевой.
Асинхронный двигатель разработан как компромисс между потерями в стали и в меди. Если вы уменьшите количество витков статора, потери в меди уменьшатся из-за более низкого сопротивления, но поток в железе увеличится, что приведет к увеличению потерь в стали.Если поток в чугуне слишком высок, потери резко возрастают и железо считается насыщенным. Цель состоит в том, чтобы работать близко к насыщению, чтобы минимизировать потери меди, но не в насыщении, чтобы минимизировать потери в железе. Номинальное напряжение отражает оптимальный магнитный поток при номинальной частоте. Когда вы уменьшаете частоту, подаваемую на двигатель, вам необходимо уменьшать напряжение, чтобы сохранить ту же плотность потока. Если вы этого не сделаете, плотность потока увеличится, и железо насыщается.
Преобразователь частоты обычно демонстрирует постоянное соотношение напряжение / частота от номинальной частоты до низкой частоты.Проще говоря, вы можете провести прямую линию от нуля вольт при нулевой Гц до номинального напряжения при номинальной частоте.
На низких частотах, с постоянным соотношением напряжение / частота, магнитный поток будет уменьшаться из-за отношения между реактивной составляющей и резистивной составляющей статора; следовательно, для увеличения низкочастотного крутящего момента нормально обеспечить некоторое повышение напряжения (амплитуды) на очень низких частотах. Это необходимо только для тяжелых нагрузок.
По сути, если вы посмотрите на эквивалентную схему асинхронного двигателя, вы хотите, чтобы ток, протекающий через намагничивающую катушку, оставался постоянным на всех частотах.Это обеспечит постоянный поток.
Электрические асинхронные двигатели – синхронная скорость
Синхронная скорость для электрического асинхронного двигателя определяется
- частотой источника питания и
- числом полюсов в обмотке двигателя.
Синхронная скорость может быть рассчитана как:
n = f (2 / p) 60 (1)
где
n = скорость вращения вала (об / мин, об / мин)
f = частота электропитания (Гц, циклы / с, 1 / с)
p = количество полюсов
Примечание – an асинхронный двигатель никогда не достигнет своей синхронной скорости. Если бы это было так, ротор казался бы неподвижным по отношению к вращающемуся полю статора, поскольку он вращался бы с той же скоростью. При отсутствии относительного движения между статором и полем ротора в двигателе не будет индуцироваться напряжение. Поэтому скорость асинхронного двигателя ограничена скоростью ниже синхронной, а разница между синхронной скоростью и фактической скоростью называется скольжением.
Если бы это было так, ротор казался бы неподвижным по отношению к вращающемуся полю статора, поскольку он вращался бы с той же скоростью. При отсутствии относительного движения между статором и полем ротора в двигателе не будет индуцироваться напряжение. Поэтому скорость асинхронного двигателя ограничена скоростью ниже синхронной, а разница между синхронной скоростью и фактической скоростью называется скольжением.
Пример – синхронная скорость двухполюсного электродвигателя
На двухполюсный двигатель подается мощность с частотой 50 Гц (1 / с) .Скорость вращения может быть вычислена как
n = (50 1 / с) (2/2) (60 с / мин)
= 3000 об / мин (1 / мин)
Синхронный скорость вращения при разных частотах и количестве полюсов
| Скорость вращения вала – n – (об / мин, об / мин) | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Частота – f – (Гц) | Количество полюса – p – | ||||||||||||
| 2 | 4 | 6 | 8 | 10 | 12 | ||||||||
| 10 | 600 | 300 | 300 | 100 | |||||||||
| 20 | 1200 | 600 | 400 | 300 | 240 | 200 | |||||||
| 30 | 1800 | 900 | 600 | 90 142450360 | 300 | ||||||||
| 40 | 2400 | 1200 | 800 | 600 | 480 | 400 | |||||||
| 50 | 43 1) 9014 902 902 9014750 | 600 | 500 | ||||||||||
| 60 2) | 3600 | 1800 | 1200 | 900 | 720 | 600 | 9014 | 70 | 1050 | 840 | 700 | ||
| 80 | 4800 | 2400 | 1600 | 1200 | 960 | 800 | |||||||
| 9014 1080 | 900 | ||||||||||||
| 100 | 6000 | 3000 | 2000 | 1500 | 1200 | 1000 | |||||||
- Двигатели, рассчитанные на 50 Гц, чаще всего встречаются за пределами U.
 S
S - Двигатели, рассчитанные на 60 Гц, наиболее распространены в США.
Частотно-регулируемый привод
Частотно-регулируемый привод модулирует скорость электродвигателя путем изменения частоты источника питания.
Асинхронный двигатель– обзор
29.5.2.1 Асинхронный двигатель с короткозамкнутым ротором
Асинхронные двигатели с короткозамкнутым ротором имеют более простую конструкцию, чем двигатели постоянного тока, и чаще всего используются в промышленности преобразователей частоты.Они прочные и надежные. Они не требуют особого обслуживания и доступны по очень конкурентоспособным ценам. Они могут быть разработаны с полностью закрытыми двигателями для работы в грязных и взрывоопасных средах. Их первоначальная стоимость существенно меньше, чем у коллекторных двигателей, а их эффективность сопоставима. Все эти особенности делают их привлекательными для использования в промышленных приводах.
Трехстаторные обмотки создают вращающийся магнитный поток, вращающийся с синхронной скоростью. Эта скорость зависит от числа полюсов двигателя и частоты питания: вращающийся поток пересекает обмотки ротора и индуцирует ЭДС в обмотке ротора, что, в свою очередь, приводит к возникновению циркулирующего тока.Токи ротора создают второй магнитный поток, который взаимодействует с потоком статора, создавая крутящий момент для ускорения машины. По мере ускорения ротора индуцированное напряжение ротора падает по величине и частоте до тех пор, пока не будет достигнута равновесная скорость. В этот момент индуцированный ток ротора достаточен для создания крутящего момента, требуемого нагрузкой. Скорость ротора немного ниже синхронной скорости на частоту скольжения, обычно 3%.
Эта скорость зависит от числа полюсов двигателя и частоты питания: вращающийся поток пересекает обмотки ротора и индуцирует ЭДС в обмотке ротора, что, в свою очередь, приводит к возникновению циркулирующего тока.Токи ротора создают второй магнитный поток, который взаимодействует с потоком статора, создавая крутящий момент для ускорения машины. По мере ускорения ротора индуцированное напряжение ротора падает по величине и частоте до тех пор, пока не будет достигнута равновесная скорость. В этот момент индуцированный ток ротора достаточен для создания крутящего момента, требуемого нагрузкой. Скорость ротора немного ниже синхронной скорости на частоту скольжения, обычно 3%.
Чтобы обеспечить постоянное возбуждение машины и максимизировать производство крутящего момента до базовой скорости, отношение напряжения статора к частоте необходимо поддерживать приблизительно постоянным.
Привод с асинхронным двигателем имеет три отдельных рабочих региона:
- (a)
Постоянный крутящий момент : Напряжение инвертора регулируется до максимального значения, ограниченного напряжением питания.
 Поскольку скорость двигателя и напряжение увеличиваются пропорционально, постоянная В, / F , номинальная потокосцепление сохраняется до базовой скорости. Значения крутящего момента до максимального значения могут быть получены на скоростях примерно до этого базового значения. Максимально доступный крутящий момент пропорционален квадрату потокосцепления.Как правило, асинхронный двигатель рассчитан на непрерывный номинальный крутящий момент примерно 40% –50% от его максимального крутящего момента.
Поскольку скорость двигателя и напряжение увеличиваются пропорционально, постоянная В, / F , номинальная потокосцепление сохраняется до базовой скорости. Значения крутящего момента до максимального значения могут быть получены на скоростях примерно до этого базового значения. Максимально доступный крутящий момент пропорционален квадрату потокосцепления.Как правило, асинхронный двигатель рассчитан на непрерывный номинальный крутящий момент примерно 40% –50% от его максимального крутящего момента.- (b)
Постоянная мощность : Для более высокой скорости частота инвертора может быть увеличена, но напряжение питания должно поддерживаться постоянным на максимальном значении, доступном в источнике питания. Это заставляет потокосцепление статора уменьшаться обратно пропорционально частоте. Постоянная мощность может быть достигнута до скорости, при которой максимальный крутящий момент, доступный от двигателя, достаточен для достижения кривой постоянной мощности.
 Обычно достигается постоянный диапазон скорости 2–2,5. В этом диапазоне частота двигателя увеличивается до максимальной скорости.
Обычно достигается постоянный диапазон скорости 2–2,5. В этом диапазоне частота двигателя увеличивается до максимальной скорости.- (c)
Ограничение машины (крутящий момент на отрыв) : После достижения предела машины крутящий момент падает пропорционально квадрату частоты двигателя. Работа на более высоком конце этого диапазона скорости может быть невозможна, так как коэффициент мощности двигателя ухудшается. Это, в свою очередь, приводит к более высокому току статора, чем номинальное значение.Нагрев двигателя может быть чрезмерным, если коэффициент заполнения не низкий.
Асинхронные двигатели используются в приложениях, требующих быстрого и точного управления крутящим моментом, скоростью и положением вала.
Метод управления, широко используемый в этом типе приложений, известен как векторное управление, можно получить переходную характеристику, по крайней мере эквивалентную характеристике коллекторного двигателя.
Переменные напряжения, тока и потокосцепления в этой схеме представляют собой пространственные векторы, из которых можно получить мгновенные значения фазовых величин путем проецирования пространственного вектора на три радиальные оси, смещенные на 120 градусов друг от друга. Действительная и мнимая составляющие пространственных векторов разделены, в результате чего образуются отдельные эквивалентные схемы прямой и квадратурной оси, но с равными параметрами по двум осям.
Действительная и мнимая составляющие пространственных векторов разделены, в результате чего образуются отдельные эквивалентные схемы прямой и квадратурной оси, но с равными параметрами по двум осям.
Изменения в потокосцеплении ротора могут происходить только относительно медленно из-за большого значения намагничивающей индуктивности асинхронного двигателя. Векторное управление основано на поддержании постоянной величины пространственного вектора мгновенного тока намагничивания, так что потокосцепление ротора остается постоянным.Электродвигатель питается от инвертора, который обеспечивает мгновенно управляемый набор фазных токов, которые в совокупности образуют пространственный вектор, который контролируется, чтобы иметь постоянную величину, чтобы поддерживать постоянную потокосцепление ротора. Второй компонент – пространственный вектор, который находится в пространственной квадратуре с пространственным вектором мгновенного тока намагничивания. Этот компонент мгновенно управляется пропорционально требуемому крутящему моменту.
В той степени, в которой инвертор может подавать мгновенные токи статора, удовлетворяющие этим двум требованиям, двигатель способен без задержки реагировать на запрос крутящего момента.Эта особенность в сочетании с относительно низкой инерцией ротора асинхронного двигателя делает этот привод привлекательным для высокопроизводительных систем управления.
Для векторного управления требуются средства измерения или оценки мгновенной величины и угла пространственного вектора потокосцепления ротора. Прямое измерение, как правило, невозможно. Быстрые успехи делаются в разработке конфигураций управления, которые используют измеренные значения электрических клемм для оценки.
29.5.2.2 Привод асинхронного двигателя с фазным ротором
Асинхронные двигатели с фазным ротором и тремя контактными кольцами ротора уже много лет используются в приводах с регулируемой скоростью.В асинхронном двигателе крутящий момент равен мощности, пересекающей воздушный зазор, деленной на синхронную механическую скорость. В первых приводах асинхронных двигателей с контактным кольцом мощность передавалась через двигатель и рассеивалась на внешних сопротивлениях, подключенных к клеммам контактных колец ротора. Это привело к неэффективному движению в большинстве диапазонов скоростей. Более современные приводы с контактным кольцом используют инвертор для восстановления мощности от цепи ротора, возвращая ее в систему питания.
В первых приводах асинхронных двигателей с контактным кольцом мощность передавалась через двигатель и рассеивалась на внешних сопротивлениях, подключенных к клеммам контактных колец ротора. Это привело к неэффективному движению в большинстве диапазонов скоростей. Более современные приводы с контактным кольцом используют инвертор для восстановления мощности от цепи ротора, возвращая ее в систему питания.
Скорость асинхронного двигателя с контактным кольцом можно регулировать следующими способами:
- •
Регулирование частоты статора, как в машине с ротором с сепаратором.
- •
Регулировка частоты ротора.
- •
Контроль сопротивления ротора.
- •
Рекуперация энергии скольжения (система Крамера). По причинам капитальных затрат обычно используются два последних.
Добавление сопротивления ротора, особенно для запуска больших асинхронных двигателей, хорошо известно. Основной эффект, производимый добавлением сопротивления ротора, заключается в изменении скорости, при которой развивается максимальный крутящий момент двигателя.К сожалению, происходит рассеяние мощности в виде тепла в банке сопротивления ротора; Ранее средства преодоления этого недостатка заключались в преобразовании мощности ротора в постоянный ток и питании двигателя постоянного тока на том же валу. Таким образом, энергия скольжения ротора при работе на пониженной скорости преобразуется в механическую энергию. Это система «Крамер». Недостатками такого подхода были дополнительные затраты на обслуживание и капитальные затраты.
Основной эффект, производимый добавлением сопротивления ротора, заключается в изменении скорости, при которой развивается максимальный крутящий момент двигателя.К сожалению, происходит рассеяние мощности в виде тепла в банке сопротивления ротора; Ранее средства преодоления этого недостатка заключались в преобразовании мощности ротора в постоянный ток и питании двигателя постоянного тока на том же валу. Таким образом, энергия скольжения ротора при работе на пониженной скорости преобразуется в механическую энергию. Это система «Крамер». Недостатками такого подхода были дополнительные затраты на обслуживание и капитальные затраты.
Статическая система Kramer преодолевает эти недостатки, заменяя машину постоянного тока инвертором с линейной коммутацией, который возвращает энергию скольжения непосредственно в линию переменного тока либо напрямую (в системах с меньшей мощностью), либо через трансформатор.Ключевым преимуществом приводной системы Kramer является то, что оборудование для рекуперации энергии скольжения (машины постоянного тока или статический инвертор) должно быть рассчитано только на часть максимальной мощности двигателя. Это верно, когда требуется небольшой диапазон скоростей и при условии, что предусмотрено отдельное средство запуска двигателя. Это связано с тем, что ток ротора двигателя пропорционален крутящему моменту, а напряжение ротора обратно пропорционально скорости.
Это верно, когда требуется небольшой диапазон скоростей и при условии, что предусмотрено отдельное средство запуска двигателя. Это связано с тем, что ток ротора двигателя пропорционален крутящему моменту, а напряжение ротора обратно пропорционально скорости.
Естественно, если сеть рекуперации энергии скольжения может быть рассчитана на выдерживание полного напряжения ротора (возникающего в состоянии покоя), может быть достигнут регулируемый диапазон скорости от нуля до максимума.Однако, как правило, это возможно только для двигателей меньшей мощности (менее 2000 кВт), где напряжение на роторе достаточно низкое для экономичного инвертора. Во-вторых, если требуется полный диапазон скоростей, сеть рекуперации энергии скольжения должна быть рассчитана на полную мощность двигателя, поэтому статические приводы Крамера становятся неэкономичными для широкого диапазона скоростей. Общий коэффициент мощности системы будет очень низким для системы с широким диапазоном скоростей.
По указанным выше причинам приводы Kramer очень подходят для приводов большой мощности (> 200 кВт), где требуется небольшой диапазон скоростей. Таким образом, приводы насосов и вентиляторов представляют собой хорошее экономичное применение. Приводы Kramer также использовались для динамометрических стендов с низким скоростным диапазоном, использующих систему восстановления для управления крутящим моментом индукционного генератора. Как и во всех преобразователях и инверторах с сетевой коммутацией, возникают гармоники тока, которые можно уменьшить до приемлемых значений. Однако, поскольку сеть рекуперации энергии скольжения рассчитана на номинальную мощность только в прямой зависимости от требуемого снижения скорости (при условии постоянного момента нагрузки), величины генерируемых гармонических токов пропорционально меньше, чем у приводов, где твердотельные преобразователи должны справиться со всей мощностью привода.Гармоники роторных выпрямителей передаются через ротор и проявляются как нецелые гармоники в основном питании.
Таким образом, приводы насосов и вентиляторов представляют собой хорошее экономичное применение. Приводы Kramer также использовались для динамометрических стендов с низким скоростным диапазоном, использующих систему восстановления для управления крутящим моментом индукционного генератора. Как и во всех преобразователях и инверторах с сетевой коммутацией, возникают гармоники тока, которые можно уменьшить до приемлемых значений. Однако, поскольку сеть рекуперации энергии скольжения рассчитана на номинальную мощность только в прямой зависимости от требуемого снижения скорости (при условии постоянного момента нагрузки), величины генерируемых гармонических токов пропорционально меньше, чем у приводов, где твердотельные преобразователи должны справиться со всей мощностью привода.Гармоники роторных выпрямителей передаются через ротор и проявляются как нецелые гармоники в основном питании.
Основными недостатками привода асинхронного электродвигателя с контактным кольцом являются (а) повышенная стоимость двигателя по сравнению с короткозамкнутым ротором, (б) необходимость технического обслуживания контактных колец, (в) сложность работы в опасных средах , (г) потребность в переключаемых пусковых резисторах и (д) низкий коэффициент мощности по сравнению с другими типами приводов.
Объяснение скорости двигателя: погружение в двигатели переменного и постоянного тока
Скорость, крутящий момент, мощность и напряжение являются важными факторами при выборе двигателя.В этом блоге, состоящем из двух частей, мы углубимся в особенности скорости двигателя. В части 1 мы обсудим, как скорость различается между типами двигателей, а в части 2 мы рассмотрим, когда следует рассмотреть возможность добавления коробки передач в приложение.
Скорость асинхронного двигателя переменного тока
Электродвигатели переменного тока уникальны тем, что созданы для работы на определенных скоростях независимо от их конструкции или производителя. Скорость двигателя переменного тока зависит от количества полюсов и частоты сети источника питания, а не от его напряжения.Обычные двигатели переменного тока состоят из двух или четырех полюсов. В полюсах статора создается магнитное поле, которое индуцирует результирующие магнитные поля в роторе, которые соответствуют частоте изменяющегося магнитного поля в статоре.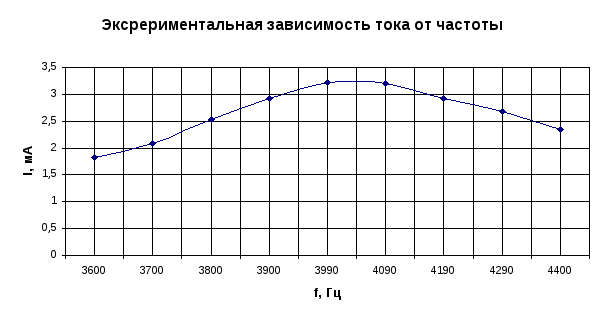 Двухполюсные двигатели переменного тока, работающие с частотой 60 Гц, всегда будут работать со скоростью примерно 3600 об / мин, а четырехполюсные двигатели переменного тока будут иметь скорость около 1800 об / мин.
Двухполюсные двигатели переменного тока, работающие с частотой 60 Гц, всегда будут работать со скоростью примерно 3600 об / мин, а четырехполюсные двигатели переменного тока будут иметь скорость около 1800 об / мин.
Скорость = 120 x частота (Гц) / число полюсов двигателя
Пример 120 x 60 Гц / 4 полюса = 1800 об / мин.
Имейте в виду, что скорость двигателя переменного тока не будет достигать этих точных значений – и будет немного ниже – потому что существует определенная величина скольжения, которая должна присутствовать для двигателя для создания крутящего момента. Ротор всегда будет вращаться медленнее, чем магнитное поле статора, и постоянно играет в догонялки. Это создает крутящий момент для запуска двигателя переменного тока. Разница между синхронными скоростями статора (3600 и 1800 об / мин) и фактической рабочей скоростью называется скольжением.(Дополнительную информацию о скольжении можно найти в нашем блоге «Синхронные и асинхронные двигатели: обнаруживая разницу». )
)
Элемент управления может использоваться для изменения скорости трехфазного двигателя переменного тока путем увеличения или уменьшения частоты, передаваемой на двигатель, в результате чего он ускоряется или замедляется. Кроме того, многие элементы управления переменного тока имеют однофазный вход, поэтому это позволяет запускать трехфазные двигатели на объектах, где отсутствует трехфазное питание.
Однако такая возможность изменять скорость не характерна для однофазных двигателей переменного тока.Эти двигатели подключаются непосредственно к стандартной розетке и работают с установленной доступной частотой. Исключением из этого практического правила может быть потолочный вентилятор, который работает от однофазного двигателя переменного тока, но имеет три различных настройки скорости.
Скорость двигателя постоянного тока Хотя двигатели постоянного тока с постоянными магнитами также построены с полюсами, эти полюса не влияют на скорость, как в двигателях переменного тока, потому что есть несколько других факторов, влияющих на двигатели постоянного тока. Количество витков провода в якоре, рабочее напряжение двигателя и сила магнитов влияют на скорость двигателя.Если двигатель постоянного тока работает от батареи 12 В, это максимальное напряжение, доступное для устройства, и двигатель сможет работать только на скорости, рассчитанной на 12 В. Если батарея разряжена и подает меньшее напряжение, скорость соответственно уменьшится.
Количество витков провода в якоре, рабочее напряжение двигателя и сила магнитов влияют на скорость двигателя.Если двигатель постоянного тока работает от батареи 12 В, это максимальное напряжение, доступное для устройства, и двигатель сможет работать только на скорости, рассчитанной на 12 В. Если батарея разряжена и подает меньшее напряжение, скорость соответственно уменьшится.
Теперь, если вы подключите тот же самый двигатель 12 В постоянного тока к источнику питания 24 В постоянного тока, ваша скорость обычно удваивается. Имейте в виду, что работа двигателя с удвоенной скоростью при одной и той же точке нагрузки / крутящего момента приведет к тому, что двигатель будет работать более интенсивно, создавая дополнительное тепло, которое со временем может вызвать преждевременный отказ двигателя.
Как и в случае трехфазных двигателей переменного тока и бесщеточных двигателей постоянного тока, средства управления могут использоваться с двигателями постоянного тока. Регуляторы постоянного тока регулируют скорость, изменяя напряжение, подаваемое на двигатель (это отличается от средств управления двигателем переменного тока, которые регулируют частоту сети на двигатель).
Типичные скорости холостого хода или синхронные скорости для двигателя переменного тока с дробной мощностью 1800 или 3600 об / мин и от 1000 до 5000 об / мин для двигателей постоянного тока с дробной мощностью. Если приложение требует более низкой скорости и / или более высокого крутящего момента, следует рассмотреть вариант использования редукторного двигателя.Чтобы узнать больше о добавлении редуктора, ознакомьтесь с частью 2, «Объяснение скорости двигателя: когда использовать редуктор».
Электродвигатель | Британника
Самый простой тип асинхронного двигателя показан на рисунке в разрезе. Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть подключены по схеме “звезда”, обычно без внешнего подключения к нейтральной точке, или по схеме “треугольник”. Ротор состоит из цилиндрического стального сердечника с проводниками, размещенными в пазах по всей поверхности.В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора проводящим концевым кольцом.
Поперечное сечение трехфазного асинхронного двигателя.
Encyclopdia Britannica, Inc. Основы работы асинхронного двигателя можно разработать, сначала предположив, что обмотки статора подключены к трехфазному источнику питания и что набор из трех синусоидальных токов, показанных на рисунке, протекает в обмотках статора.На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести моментов цикла. Для простоты показана только центральная токопроводящая петля для каждой фазной обмотки. В момент t 1 на рисунке, ток в фазе a является максимально положительным, тогда как ток в фазах b и c составляет половину отрицательного значения. Результатом является магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу.В момент времени t 2 на рисунке (т. Е. Одна шестая цикла позже), ток в фазе c является максимально отрицательным, в то время как в фазе b и фазе a составляет половину значения положительный. В результате, как показано на рисунке для t 2 , снова будет синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Исследование распределения тока для t 3 , t 4 , t 5 и t 6 показывает, что магнитное поле продолжает вращаться с течением времени.Поле совершает один оборот за один цикл токов статора. Таким образом, совокупный эффект трех равных синусоидальных токов, равномерно смещенных во времени и текущих в трех обмотках статора, равномерно смещенных в угловом положении, должен создать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Е. Одна шестая цикла позже), ток в фазе c является максимально отрицательным, в то время как в фазе b и фазе a составляет половину значения положительный. В результате, как показано на рисунке для t 2 , снова будет синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Исследование распределения тока для t 3 , t 4 , t 5 и t 6 показывает, что магнитное поле продолжает вращаться с течением времени.Поле совершает один оборот за один цикл токов статора. Таким образом, совокупный эффект трех равных синусоидальных токов, равномерно смещенных во времени и текущих в трех обмотках статора, равномерно смещенных в угловом положении, должен создать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
 Подпишись сейчас
Подпишись сейчас Вращательное движение магнитного поля относительно проводников ротора вызывает индуцирование напряжения в каждом из них, пропорциональное величине и скорости поля относительно проводников.Поскольку проводники ротора замкнуты накоротко на каждом конце, это приведет к протеканию токов в этих проводниках. В простейшем режиме работы эти токи будут примерно равны индуцированному напряжению, деленному на сопротивление проводника. Картина токов ротора за мгновение t 1 рисунка показана на этом рисунке. Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки на роторе (т.е.е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному снижению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, необходимому на этой скорости для нагрузки, при отсутствии избыточного крутящего момента для ускорения объединенной инерции нагрузки и двигателя.
Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, необходимому на этой скорости для нагрузки, при отсутствии избыточного крутящего момента для ускорения объединенной инерции нагрузки и двигателя.
Вращающееся поле и токи, которые оно создает в короткозамкнутых проводниках ротора.
Encyclopdia Britannica, Inc. Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Исходные токи статора, показанные на рисунке, достаточны только для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле при наличии токов ротора, показанных на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае могло бы возникнуть. токами ротора на рисунке.Полный ток статора в каждой фазной обмотке складывается из синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90 °, для обеспечения необходимой электроэнергии. Второй, или силовой, компонент тока находится в фазе с напряжением, приложенным к статору, в то время как первый, или намагничивающий, компонент отстает от приложенного напряжения на четверть цикла или 90 °. При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
Второй, или силовой, компонент тока находится в фазе с напряжением, приложенным к статору, в то время как первый, или намагничивающий, компонент отстает от приложенного напряжения на четверть цикла или 90 °. При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазному источнику питания постоянного напряжения и постоянной частоты. Типичные напряжения питания находятся в диапазоне от 230 вольт между фазами для двигателей относительно небольшой мощности (например, от 0,5 до 50 киловатт) до около 15 киловольт между фазами для двигателей большой мощности и до около 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласуется со скоростью изменения магнитного потока в статоре машины во времени.Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля остается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле вращается на один оборот за каждый цикл частоты питания. Для источника с частотой 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать необходимое напряжение в проводниках ротора для создания тока ротора, необходимого для момента нагрузки.При полной нагрузке скорость обычно на 0,5–5 процентов ниже полевой скорости (часто называемой синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера. Эта разница в скорости часто называется скольжением.
Другие синхронные скорости могут быть получены с источником постоянной частоты путем создания машины с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f – частота в герцах (циклов в секунду), а p – количество полюсов (которое должно быть четное число). Данный железный каркас может быть намотан для любого из нескольких возможных количеств пар полюсов с помощью катушек, охватывающих угол приблизительно (360/ p ) °. Крутящий момент, доступный от рамы машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для двигателей с частотой 60 Гц – 1800 и 1200 оборотов в минуту.
Данный железный каркас может быть намотан для любого из нескольких возможных количеств пар полюсов с помощью катушек, охватывающих угол приблизительно (360/ p ) °. Крутящий момент, доступный от рамы машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для двигателей с частотой 60 Гц – 1800 и 1200 оборотов в минуту.
Регулировка скорости двигателя переменного тока с помощью переменной частоты поля
Сообщение от Jraef Вы описываете два разных типа двигателей, которые имеют электрические соединения с вращающимися элементами; Асинхронные двигатели с обмоткой ротора и синхронные двигатели, затем смешивание их свойств. Они не смешиваются, это как слоны и жирафы; оба высокие, но совершенно разные животные.
Поскольку большая часть искусства, с которым я играл, достаточно старое, чтобы стать общественным достоянием, а я слишком стар и в бедности, чтобы начать новую индустрию, я могу также объяснить, о чем идет речь.
Любой, кто не находится в устойчивом вегетативном состоянии, знает, что одна из самых больших проблем, если не самая большая, альтернативной энергии – это хранение. Маховик, особенно на магнитном подвесе или на воздушных подшипниках, работающий в вакууме, является одним из наиболее эффективных средств хранения энергии.Главный недостаток заключается в том, что добавление или снятие энергии требует изменения скорости маховиком. Следовательно, мы видим все эти системы с акрами транзисторов и выпрямителей, преобразующих в постоянный ток и инвертирующих обратно.
Цель состоит в том, чтобы устранить все эти схемы и сделать что-то, что при плановом техническом обслуживании будет работать в следующем столетии.
Маховик с генератором, состоящим из типичного статора и ротора с одинаковым числом полюсов, может генерировать переменные частоты, создавая в роторе вращающееся поле, которое добавляет или вычитает частоту механической скорости.Можно отслеживать скорость маховика, чтобы получить постоянные 60 сПс или что-то еще.
Если вы добавите возбудитель, сконструированный таким же образом, с тем же числом полюсов, возбудите статор со скоростью 60 CPS и соедините два ротора вместе, частота ротора будет сдвинута вверх или вниз с 60 CPS, но комбинация ротора и статора генератора сдвинул бы его обратно. Вы можете запитать возбудитель 60 CPS от линии и получить выход с синхронизацией по частоте и фазе. Регулируя напряжение и фазу на входе возбудителя, вы можете заставить систему работать как двигатель или генератор, в зависимости от того, хотите ли вы сохранять или высвобождать мощность.
Есть на что обратить внимание. Запуск маховика на синхронной скорости в том же направлении вращения, что и вход возбудителя, даст нулевой выходной сигнал. Наверное, лучше всего было бы запустить их в противоположные стороны. Таким образом, при синхронной скорости вращения маховика частота ротора будет 120 CPS. При пятикратной синхронности частота ротора будет 360 с / с, что по-прежнему будет в пределах слоёв кремнистой стали и обычных конфигураций. Возможно, что система попытается работать в обратном направлении, при этом генератор будет действовать как возбудитель, а возбудитель будет пытаться двигаться.Этого следует избегать. Гораздо более серьезная проблема, которую я не решил к своему удовлетворению, заключается в том, что вращение переменного тока, питающего возбудитель, будет проходить через трансформатор, требуя гораздо большей мощности возбудителя, чем простой генератор. Он может получать его из выпуска, то есть просто циркулировать, но это означает больше потерь. Я думаю, что ответ состоит в том, чтобы работать со скоростью, кратной синхронизирующей, поэтому генерация в основном осуществляется механической работой.
