
Циркуляркой уже полным ходом пилили на конденсаторах, когда появился необходимый вариант прошивки. Модули содержат шесть силовых ключей и схему управления.
Рядом с микропроцессором показан SWD -разъем P2 интерфейса прошивки микропроцессора и отладки кода с последовательным доступом. Убеждаемся, что привод функционирует.
Они задействованы для измерений напряжений шины постоянного тока, аналогового входа, фазных противо-ЭДС. И с одной парой полюсов и с мя.
Cтруктура и схема преобразователя частоты. Часть 1.
Долгий является также автором цикла статей о микроконтроллерах и многих других конструкций. Три диода и десяток резисторов, подключенных к процессору — хоть и не лучше схемотехническое решение, но решать задачу подхвата ротора или промышленной сети .
Следует отметить, что по современной терминологии подобные генераторы-формирователи называются контроллерами. Первый метод основан на назначении определенной зависимости чередования последовательностей широтно-импульсной модуляции ШИМ инвертора для заранее подготовленных алгоритмов.
Каков принцип частотных методов регулирования?
Также происходит насыщение магнитопровода статора. Конечно можно было бы взять в магазине фирменный частотник, но все-таки вариант самостоятельного изготовления оказался для меня наиболее приемлемым.
Выходное напряжение изменяется с помощью отношения между длительностью открытого и закрытого состояния, причем для получения требуемого напряжения это отношение можно менять. Следует отметить, что по современной терминологии подобные генераторы-формирователи называются контроллерами.
Подключение электродвигателя через частотный преобразователь. Плюсы и минусы
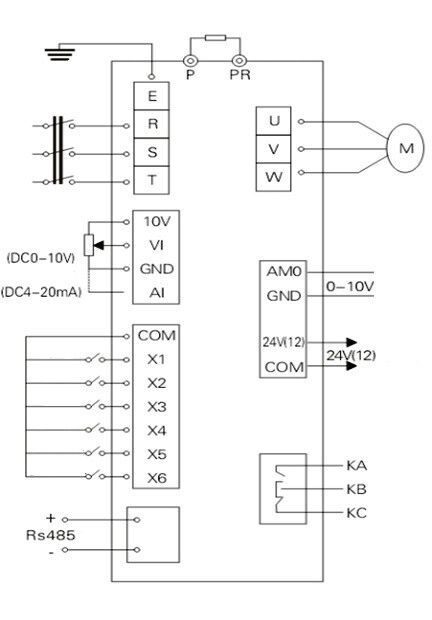
Функциональная схема подключения частотного преобразователя
При ее использовании получается произвести достаточно хорошую синусоидальную ШИМ с возможностью изменять напряжение. Крутим мотор-колесо коляски рукой, нажимаем кнопку «Пуск». Можно делать копии содержимого данной папки в родительской, переименовывать её и одноименные файлы с расширениями ewp, ewd, dep.
Обычный инвертор тока промежуточной цепи изменяющегося напряжения.
Способ ограничения зависит от вида модуляции. А так же функцию обработки прерывания таймера.

А так же функцию обработки прерывания таймера.

Они обеспечивают широкий диапазон регулировки частот, обладают высоким КПД и другими отличными техническими характеристиками. Справа от моста изображены операционные усилители нормирующие сигналы датчиков тока.
Преимуществом управляемых выпрямителей является их способность возвращать энергию в питающую сеть. Имеются три основных варианта задания режимов коммутации в инверторе с управлением посредством широтно-импульсной модуляции.
При этом амплитуда и частота напряжения на выходе преобразователя регулируются по скольжению и нагрузочному току, но без использования обратных связей по скорости вращения ротора.
ПОДКЛЮЧЕНИЕ ЧАСТОТНИКА к однофазному асинхронному двигателю.
Преобразователь частоты
Ответ на главный вопрос жизни, вселенной и бездатчикового электропривода — Чтобы избежать этих негативных последствий, при уменьшении частоты приходится снижать и эффективное значение напряжения на обмотках двигателя.
Функционирование без датчика положения. Таким образом, амплитуда отрицательных и положительных импульсов напряжения всегда соответствует половине напряжения промежуточной цепи. Способ векторов точнее и эффективнее.
Выходные сигналы с элементов DD3. Данные документируются протоколом обмена и используются пользователями, создающими программы управления для электронной техники и контроллеров.
Использование в работе частотника дает возможность работать двигателю без перерыва, экономично. Большая часть экономической эффективности заключается в возможности регулирования при помощи частотного преобразователя технологических характеристик процессов, температуры, давления, скорости движения, скорости подачи главного движения.
Данные параметры также регулируются широтно-импульсной модуляцией, а сама ширина импульсов модулируется по синусоидальному закону. Промежуточная цепь одного из трех типов: a преобразующая напряжение выпрямителя в постоянный ток. Примечание: для большинства приложений использование только пропорциональной и интегральной составляющей без использования дифференциальной составляющей даёт хорошие результаты. Такой вид управления инвертором называется амплитудно-импульсной модуляцией АИМ.
Такие преобразователи используются в мегаваттном диапазоне мощности для формирования низкочастотного питающего напряжения непосредственно из сети частотой 50 Гц, при этом их максимальная выходная частота составляет около 30 Гц. Все это управляется при помощи двух кнопок и одного переключателя, который изменяет направление вращения вала. Резисторы, соединил параллельно по кОм с помощью затворных проходных конденсаторов, позади платы их напаял. А удерживание инициирует дальнейший разгон до 50 Гц в течении приблизительно 2 секунд. SFAVM SFAVM — пространственно-векторный способ модуляции, который позволяет случайным образом, но скачкообразно изменять напряжение, амплитуду и угол инвертора в течение времени коммутации.
В описываемой схеме вполне возможно применить драйверы IR или IR В каждом из проектов имеются 7 файлов: mckits.
Механические устройства не могут выполнить такие функции. Также происходит насыщение магнитопровода статора. Моторы переделывают электроэнергию в механическое движение. Катушка индуктивности преобразует изменяющееся напряжение выпрямителя в изменяющийся постоянный ток.
Схема прямого матричного преобразователя Непрямой матричный преобразователь indirect matrix converter состоит из двунаправленного трехфазного выпрямителя, виртуального звена постоянного тока и трехфазного инвертора.
Диоды позволяют току протекать только в одном направлении: от анода А к катоду К. И они творят революцию — успешно перевели на веб-платформу комплекс программных средств для разработки электрических принципиальных схем и печатных плат.
Состоит из выпрямителя и фильтрационных устройств.
Эти значения времени коммутации должны устанавливаться таким образом, чтобы допускать только минимум высших гармоник. Печатная плата комплекта разработчика устройств управления электродвигателями Есть особенность, которую должен учитывать разработчик устройств управления электродвигателями. В наше время существует несколько компоновок инверторов с управляемыми ключами: запираемые GTO тиристоры; биполярные IGBT-транзисторные ключи с затвором.
Выходное напряжение является результатом комбинации сегментов входного напряжения в котором основная гармоника следует за опорным сигналом. Транзистор-прерыватель управляет напряжением промежуточной цепи Фильтр промежуточной цепи сглаживает прямоугольное напряжение после прерывателя. Три проекта написаны так, чтобы в режиме сравнения файлов по содержимому однозначно идентифицировалось все, что с ней связано параметры, межблочные связи, расчетный код.
В состав преобразователей частоты входят четыре основных элемента: Рис. Нажимаем кнопку Event в окне программы. Аварийные ситуации при этом сводятся на нет.
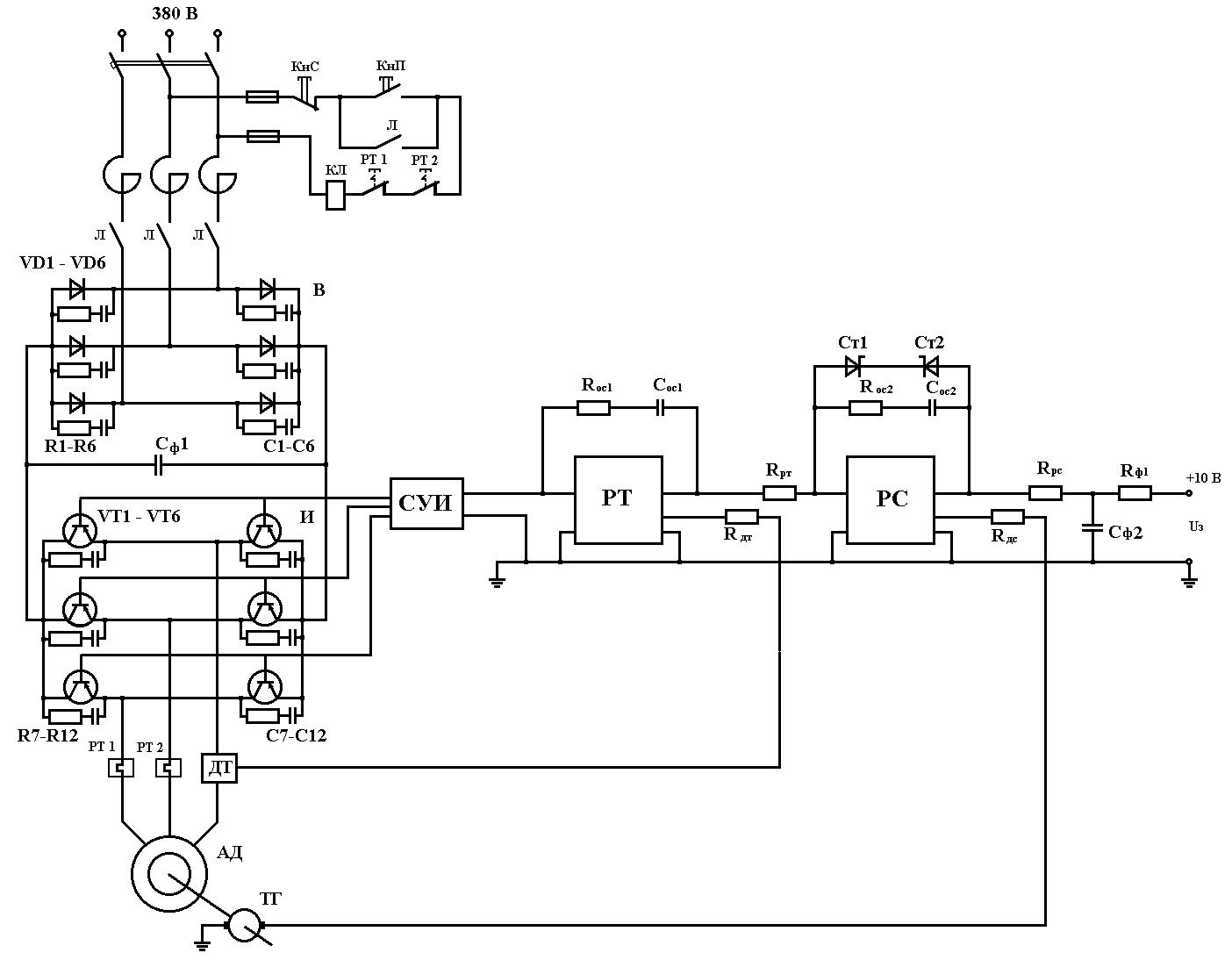
Электрическая принципиальная схема частотного преобразователя
Частота задается конденсатором C1, регулировка частоты осуществляется переменным резистором R2. Проекты пошаговой разработки программного кода цифровой системы управления В дополнение к аппаратной части, инженеру предоставлен комплект проектов для пошаговой разработки программного кода векторной системы управления.
Задача перевода объекта из одного состояния в другое решается «программной машиной состояний». Расчёт производится по значению ошибки управления — расхождению между заданным значением и значением сигнала обратной связи обычно показания датчика какого-либо технологического параметра. Электрическая принципиальная схема комплекта разработчика устройств управления электродвигателями В нижней части схемы изображены импульсный преобразователь напряжения и линейные стабилизаторы, питающие фрагменты схемы. Основным различием способов являются критерии, которые используются при вычислении значений активного тока, тока намагничивания магнитного потока и крутящего момента.
Частотник для регулирования оборотов трёхфазного двигателя
Частотный преобразователь своими руками

Частотный преобразователь своими руками — представляю вам небольшую статью о асинхронном двигателе и частотном преобразователе, который мне ранее приходилось делать. Вот и теперь потребовался хороший привод для циркулярной пилы. Конечно можно было бы взять в магазине фирменный частотник, но все-таки вариант самостоятельного изготовления оказался для меня наиболее приемлемым.
К тому же, качество регулировки скорости привода пилорамы не требовало абсолютной точности. Однако с нагрузками ударного типа и длительными перегрузками он должен справляться. К тому же хотелось сделать управление наиболее простым, без всяких там параметров, а просто установить пару кнопок.
Главные преимущества привода с регулировкой частоты:
- Создаем из однофазного напряжения 220v полновесные три фазы 220v, сдвиг у которых будет 120°, при этом получаем абсолютный вращательный момент с мощностью на валу
- Повышенный момент старта с плавным запуском без максимального пускового тока
- Нет сильного замагничивания и излишнего перегрева мотора, как это бывает когда применяются конденсаторы
- При необходимости можно свободно управлять скоростью вращения и менять направление
Ниже показана принципиальная схема устройства:

Трехфазный мост выполнен на гибридных IGBT транзисторах c диодами обратной проводимости. В целом это представляет собой бустрепное управление микроконтроллером PIC16F628A, осуществляемое с помощью специализированных оптодрайверов HCPL-3120. Во входном тракте установлен конденсатор гашения напряжения, выполняющего функцию мягкой зарядки электролитических конденсаторов в цепи постоянного напряжения.
Быстродействующая защита
Далее по схеме он зашунтирован электромагнитным реле, при этом на PIC16F628A подается цифровой логический уровень готовности. В схеме предусмотрена быстродействующая защита по току от короткого замыкания и критической перегрузке мотора, выполненная по триггерной схеме. Все это управляется при помощи двух кнопок и одного переключателя, который изменяет направление вращения вала.
Частотный преобразователь своими руками, в частности участок силовых напряжений был собран методом навесного монтажа, а контроллер размещен на печатной плате, которая показана ниже:

Постоянные резисторы с номиналом 270к, шунтирующие конденсаторы установленные в цепи затвора IGBT, запаял со стороны дорожек, так как упустил из виду сделать для них площадки. Их конечно можно заменить на smd.
Здесь показано фото печатной платы контроллера после распайки компонентов:

А это с противоположной стороны

Для подачи напряжения питания в модуль управления был изготовлен стандартный обратноходовой импульсный источник питания.
Принципиальная схема блока питания:

Чтобы изготовить частотный преобразователь своими руками в принципе можно использовать практически любой источник питания с выходным напряжением 24v. Однако, этот блок питания должен быть стабилизированный и с задержкой напряжения на выходе с момента исчезновения напряжения сети, хотябы в пределах 3-х секунд. Это обусловлено тем, что двигатель смог отключится в случае возникновения ошибки по DC. Достигается подбором электролитического конденсатора С1 с большим значением емкости.
Ну, а теперь нужно подробнее разобраться в самом важном компоненте данного устройства — в программе микроконтроллера. В интернете подходящей для меня информации по этому вопросу я не нашел, хотя были предложения установить специальные фирменные контроллеры. Но как я уже говорил, мне принципиально нужно было установить, что-то собственной разработки. Приступил во всех подробностях анализировать ШИМ модуляцию, в какое время и каким способом открыть определенный транзистор…
Программа формирования задержек
Выяснились некоторые закономерности и получился образец несложной программы формирования задержек. При ее использовании получается произвести достаточно хорошую синусоидальную ШИМ с возможностью изменять напряжение. Естественно контроллер делать какие либо вычисления не успевал, задержки не давали того эффекта, который был нужен. Следовательно, такой вариант обсчитывания ШИМ на микроконтроллере PIC16F628A я забраковал сразу.
В результате образовалась констант матрица, а ее уже отрабатывал PIC16F628A. Они формировали и диапазон частоты и напряжение питания. Конечно эта работа по созданию данного устройства несколько затянулась. Циркуляркой уже полным ходом пилили на конденсаторах, когда появился необходимый вариант прошивки. Первоначально тестировал схему на моторе от вентилятора, мощностью 180 Вт. Вот фото прибора на стадии экспериментальных работ:

Тестирование устройства
Чуть позже, в процессе испытания программа подвергалась усовершенствованию, а после запуска двигателя мощностью на 4 кВт я практически был удовлетворен итогом своей работы. Защита от короткого замыкания прекрасно срабатывает, полутора-киловаттный мотор на 1440об/мин с диском 300мм свободно справлялся с приличными брусками. Шкивы были установлены одинаковые, что на двигатель, что на вал циркулярки. При попадании пилы на сучок сетевое напряжение немного падало, хотя двигатель продолжал работать.
По ходу работы потребовалось немного натянуть ремень, поскольку при увеличении нагрузки он начинал скользить на шкиве. В дальнейшем применили двойную передачу. Но на этом решил не останавливаться, поэтому сейчас начал усовершенствовать программу, в итоге она будет значительно эффективней. Принцип работы ШИМ-контролера немного усложняется, появится больше режимов, появится ресурс раскручивания выше номинального значения.
В конце статьи файлы для того самого простого варианта устройства, которое прекрасно работает с циркулярной пилой уже больше года.
Характеристики:
- Частота на выходе: 2,5-50Гц, шаг 1,25Гц; Частота ШИМ-контроллера синхронная, с возможностью изменения. Диапазон частот в пределах 1750-3350Гц.; Скалярное управление частотным преобразователем, мощность мотора около 4кВт. Самая меньшая частота работы при разовом нажатии кнопки «Пуск» — составляет 10Гц.
- Во время удержании кнопки нажатой появляется разгоняющий момент, а когда кнопка отпускается, то частота буде той, до какой смог разогнаться. Частота по максимуму — 50Гц информирует светодиодный индикатор. Номинальное время разгоняющего момента составляет 2 секунды.
- Индикатор «Готов» сообщает о готовности устройства к старту двигателя.
Файлы:
Программа ШИММ1.0r для PIC16F628(A)
Плата управления в SPLANe
Простой преобразователь частоты для асинхронного электродвигателя.
Итак коль уж асинхронный двигатель так распространён и трехфазная система напряжения созданная М. О. Доливо-Добровольским так удобна. А современная элементная база так хороша. То сделать преобразователь частоты –это лишь вопрос личного желания и некоторых финансовых возможностей. Возможно кто то скажет « Ну, зачем мне инвертор , я поставлю фазосдвигающий конденсатор и все решено» . Но при этом обороты не покрутишь и в мощности потеряешь и потом это не интересно.
Возьмём за основу – в быту есть однофазная сеть 220в, народный размер двигателя до 1 кВт. Значить соединяем обмотки двигателя треугольником. Дальше –проще, понадобится драйвер трехфазного моста IR2135(IR2133) выбираем такой потому, что он применяется в промышленной технике имеет вывод SD и удобное расположение выводов. Подойдёт и IR2132 , но у неё dead time больше и выхода SD нет. В качестве генератора PWM выберем микроконтроллер AT90SPWM3B – доступен, всем понятен, имеет массу возможностей и недорого стоит, есть простой программатор -https://real.kiev.ua/avreal/. Силовые транзисторы 6 штук IRG4BC30W выберем с некоторым запасом по току – пусковые токи АД могут превышать номинальные в 5-6 раз. И пока не ставим “тормозной” ключ и резистор, будем тормозить и намагничивать перед пуском ротор постоянным током, но об этом позже …. Весь процесс работы отображается на 2-х строчном ЖКИ индикаторе. Для управления достаточно 6 кнопок (частота +, частота -, пуск, стоп, реверс, меню).
Получилась вот такая схема.
Я вовсе не претендую на законченность конструкции и предлагаю брать данную конструкцию за некую основу для энтузиастов домашнего электропривода. Приведённые здесь платы были сделаны под имеющиеся в моём распоряжении детали.
Конструктивно инвертор выполнен на двух платах – силовая часть ( блок питания , драйвер и транзисторы моста , силовые клеммы) и цифровая часть (микроконтроллер + индикатор ). Электрически платы соединены гибким шлейфом. Такая конструкция выбрана для перехода в будущем на контроллер TMS320 или STM32 или STM8.
Блок питания собран по классической схеме и в комментариях не нуждается. Микросхема IL300 линейная опто развязка для управления током 4-20Ма. Оптроны ОС2-4 просто дублируют кнопки «старт, стоп, реверс» для гальванически развязанного управления. Выход оптрона ОС-1 «функция пользователя» (сигнализация и пр.)
Силовые транзисторы и диодный мост закреплены на общий радиатор. Шунт 4 витка манганинового провода диаметром 0.5мм на оправке 3 мм.
Сразу замечу некоторые узлы и элементы вовсе не обязательны. Для того что бы просто крутить двигатель , не нужно внешнее управление током 4-20 Ма. Нет необходимости в трансформаторе тока, для оценочного измерения подойдёт и токовый шунт. Не нужна внешняя сигнализация. При мощности двигателя 400 Вт и площади радиатора 100см2 нет нужды в термодатчике.
ВАЖНО! – имеющиеся на плате кнопки управления изолированы от сети питания только пластмассовыми толкателями. Для безопасного управления необходимо использовать опторазвязку.
Возможные изменения в схеме в зависимости от микропрограммы.
Усилитель DA-1 можно подключать к трансформатору тока или к шунту. Усилитель DA-1-2 может быть использован для измерения напряжения сети или для измерения сопротивления терморезистора если не используется термодатчик PD-1.
В случае длинных соединительных проводов необходимо на каждый провод хотя бы надеть помехоподавляющие кольцо. Имеют место помехи. Так например –пока я этого не сделал у меня «мышь» зависала.
Так же считаю важным отметить проверку надёжности изоляции АД –т.к. при коммутации силовых транзисторов выбросы напряжение на обмотках могут достигать значений 1,3 Uпит.
Общий вид.
Немного про управление.
Начитавшись книжек с длинными формулами в основном описывающих как делать синусоиду при помощи PWM. И как стабилизировать скорость вращения вала двигателя посредством таходатчика и ПИД регулятора. Я пришёл к выводу –АД имеет достаточно жёсткую характеристику во всём диапазоне допустимых нагрузок на валу.
Поэтому для личных нужд вполне подойдет управление описанное законом Костенко М.П. или как его ещё называют скаляроное. Достаточное для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1:40. Т.е. грубо говоря мы в самом простом случае делаем обычную 3-х фазную розетку с переменной частотой и напряжением меняющимися в прямой зависимости. С небольшими «но» на начальных участках характеристики необходимо выполнять IR компенсацию т.е. на малых частотах нужно фиксированное напряжение . Втрое «но» в питающие двигатель напряжение замешать 3 гармонику. Всё остальное сделают за нас физические принципы АД. Более подробно про это можно прочесть в документе AVR494.PDF
Основываясь на моих личных наблюдениях и скромном опыте именно эти методы без особых изысков чаще всего применяются в приводах мощностью до 15 кВт.
Далее не буду углубляться в теорию и описание мат моделей АД. Это и без меня достаточно хорошо изложили профессора ещё в 60-х.
Но ни в коем случае не стоит недооценивать сложности управления АД. Все мои упрощения оправданны только некоммерческим применением инвертора.
Плата силовых элементов.
В программе V-1.0 для AT90SPWM3B реализовано
1- Частотное управление АД .Форма напряжения синусоида с 3 гармоникой.
2- Частота задания 5 Гц -50 Гц с шагом 1 Гц. Частота ШИМ 4 кГц.
3- Фиксированное время разгона –торможения
4- Реверс (только через кнопку СТОП)
5- Разгон до заданной частоты с шагом 1 Гц
6 – Индикация показаний канала АЦП 6 (разрядность 8 бит., оконный фильтр апертура 4 бита)
я использую этот канал для замера тока шунта.
7 – Индикация режима работы START,STOP,RUN,RAMP, и Частота в Гц.
8- Обработка сигнала авария от мс IR2135
Торможение двигателя принудительное – без выбега. При этом нужно помнить – если на валу будет висеть огромный вентилятор или маховик то напряжение на звене постоянного тока может достичь опасных значений. Но я думаю вертолёты с приводом от АД строить никто не будет
Функции микропрограммы в будущих версиях
1 -намагничивание ротора перед пуском
2- торможение постоянным током
3 –прямой реверс
4 – частота задания 1 -400 Гц.
5 – ограничение, контроль тока двигателя.
6 – переключаемые зависимости U/F
7 – контроль звена постоянного тока.
8 – некоторые макросы управления –это вообще в далёких планах.
Испытания.
Данная конструкции была проверена с двигателем 0.18кВт и 0.4 кВт и 0.8 кВт. Все двигатели остались довольны.
Только при малых оборотах и долговременной работе необходимо принудительное охлаждение АД.
Строка для программатора
av_28r4.exe -aft2232 -az +90pwm3b -e -w -v -fckdiv=1,psc2rb=0,psc1rb=0,psc0rb=0,pscrv=0,bodlevel=5 -c01.hex
Небольшое “вечернее” видео испытаний
Файлы:
плата микроконтроллера -layout5.0
силовой модуль -layout5.0
Программа для МК
Схема
схема S_plan7 -архив rar
Все вопросы в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
РадиоКот :: Частотный преобразователь
РадиоКот >Схемы >Цифровые устройства >Защита и контроль >Частотный преобразователь
Всем здравствуйте. Вот решил написать статейку про асинхронный привод и преобразователь частоты, который я изготавливал. Моему товарищу надо было крутить пилораму, и крутить хорошо. А сам я занимался импульсной электроникой и сразу предложил ему частотник. Да, можно было купить фирмовый преобразователь, и мне приходилось с ними сталкиваться, параметрировать, но захотелось своего, САМОДЕЛАШНОГО! Да и привод циркулярки к качеству регулирования скорости не критичен, только вот к ударным нагрузкам и к работе в перегрузе должен быть готов. Также максимально-простое управление с помощью пары кнопок и никаких там параметров.
Основные достоинства частотнорегулируемого привода (может для кого-то повторюсь):
Формируем из одной фазы 220В полноценные 3 фазы 220В со сдвигом 120 град., и имеем полный вращающий момент и мощность на валу.
Увеличенный пусковой момент и плавный пуск без большого пускового тока
Отсутствует замагничивание и лишний нагрев двигателя, как при использовании конденсаторов.
Возможность легко регулировать скорость и направление, если необходимо.
Вот какая схемка собралась:
3-фазный мост на IGBT транзисторах c обратными диодами (использовал имеющиеся G4PH50UD) управляется через оптодрайвера HCPL 3120 (бутстрепная схема запитки) микроконтроллером PIC16F628A. На входе гасящий конденсатор для плавного заряда электролитов DC звена. Затем его шунтирует реле и на микроконтроллер одновременно приходит логический уровень готовности. Также имеется триггер токовой защиты от к.з. и сильной перегрузки двигателя. Управление осуществляют 2 кнопки и тумблер изменения направления вращения.
Силовая часть мною была собрана навесным монтажом. Плата контроллера отутюжина вот в таком виде:
Параллельные резисторы по 270к на проходных затворных конденсаторах (забыл под них места нарисовать) припаял сзади платы, потом хотел заменить на смд но так и оставил.
Есть внешний вид этой платы, когда уже спаивал:
С другой стороны
Для питания управления был собран типовой импульсный обратноходовой (FLAYBACK) блок питания.
Его схема:
Можно использовать любой блок питания на 24В, но стабилизированный и с запаздыванием пропадания выходного напряжения от момента пропажи сетевого на пару тройку секунд. Это необходимо чтобы привод успел отключиться по ошибке DC. Добивался установкой электролита С1 большей ёмкости.
Теперь о самом главном…о програме микроконтроллера. Программирование простых моргалок для меня сложности не представляло, но тут надо было поднатужить мозги. Порыскав в нете, я не нашёл на то время подходящей информации. Мне предлагали поставить и специализированные контроллеры, например контроллер фирмы MOTOROLA MC3PHAC. Но хотелось, повторюсь, своего. Принялся детально разбираться с ШИМ модуляцией, как и когда нужно открыть какой транзистор… Открылись некие закономерности и вышел шаблон самой простой программы отработки задержек, с помощью которой можно выдать удовлетворительно синусовую ШИМ и регулировать напряжение. Считать ничего контроллер конечно не успевал, прерывания не давали что надо и поэтому я идею крутого обсчёта ШИМ на PIC16F628A сразу отбросил. В итоге получилась матрица констант, которую отрабатывал контроллер. Они задавали и частоту и напряжение. Возился честно скажу, долго. Пилорама уже во всю пилила конденсаторами, когда вышла первая версия прошивки. Проверял всю схему сначала на 180 ватном движке вентиляторе. Вот как выглядела “экспериментальная установка”:
Первые эксперименты показали, что у этого проекта точно есть будущее.
Программа дорабатывалась и в итоге после раскрутки 4кВТ-ного движка её можно было собирать и идти на лесопилку.
Товарищ был приятно удивлён, хоть и с самого начала относился скептически. Я тоже был удивлён, т.к. проверилась защита от к.з. (случайно произошло в борно двигателя). Всё осталось живо. Двигатель на 1,5кВт 1440об/мин легко грыз брусы диском на 300мм. Шкивы один к одному. При ударах и сучках свет слегка пригасал, но двигатель не останавливался. Ещё пришлось сильно подтягивать ремень, т.к. скользил при сильной нагрузке. Потом поставили двойную передачу.
Сейчас ещё дорабатываю программу она станет еще лучше, алгоритм работы шим чуть сложнее, режимов больше, возможность раскручиваться выше номинала…а тут снизу та самая простая версия которая работает на пиле уже около года.
Её характеристики:
Выходная Частота: 2,5-50Гц, шаг 1,25Гц; Частота ШИМ синхронная, изменяющаяся. Диапазон примерно 1700-3300Гц.; Скалярный режим управления U/F, мощность двигателя до 4кВт.
Минимальная рабочая частота после однократного нажатия на кнопку ПУСК(RUN) – 10Гц.
При удержании кнопки RUN происходит разгон, при отпускании частота остаётся та, до которой успел разогнаться. Максимальная 50Гц- сигнализируется светодиодом. Время разгона около 2с.
Светодиод “готовность” сигнализирует о готовности к запуску привода.
Реверс опрашивается в состоянии готовности.
Режимов торможения и регулирования частоты вниз нет, но они в данном случае и не нужны.
При нажатии Стоп или СБРОС происходит остановка выбегом.
На этом пока всё. Спасибо, кто дочитал до конца.
Файлы:
Программа ШИММ1.0r для PIC16F628(A)
Плата управления в SPLANe
Все вопросы в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
Асинхронный двигатель (машина) – это электрический двигатель, частота вращения которого не совпадает с частотой тока (ЭДС), прикладываемого к статору.
Рис. 1. Асинхронный двигатель
К преимуществам таких двигателей можно отнести их низкую стоимость, простоту изготовления и эксплуатации, а также возможность прямого включения (без регулирования или преобразования питающего тока). Есть у них и недостатки: высокие требования к пусковому току, сложная регулировка оборотов, низкий коэффициент мощности и др.
Здесь стоит отметить, что асинхронные двигатели рассчитаны на работу только с трехфазным напряжением, только в этом случае не требуются никакие преобразователи.
Однако, в быту часто требуется запитать асинхронный двигатель от обычной сети переменного тока с одной фазой, и именно здесь кроется основная проблема.
Необходимость использования частотного преобразователя
Есть несколько способов управления асинхронным двигателем, и один из них – регулировка частоты.
Изменяя частоту питающего тока, вы меняете частоту вращения двигателя, можете запустить его или наоборот – остановить.
В качестве преобразователя напряжения наибольшее распространение нашли инверторные схемы. Они обеспечивают широкий диапазон регулировки частот, обладают высоким КПД и другими отличными техническими характеристиками.
Схему работы инверторов можно изобразить следующим образом.
Рис. 2. Схема работы инверторов
Однофазное переменное напряжение преобразуется в постоянное, подается в блок с импульсным инвертором, который формирует три независимых переменных напряжения (одинакового уровня, но со смещенной фазой) – ключа.
Схема инверторного преобразователя для асинхронного двигателя
Преобразователи можно приобрести в готовом виде, а можно изготовить своими руками.
Сложность проектирования и создания таких схем заключается в логике их работы. В настоящее время с приходом программируемых контроллеров Arduino и т.п. имеется возможность создавать сложные схемы с широким диапазоном регулировки частот всех трех питающих напряжений. Однако, для начала рассмотрим простые варианты.
Двигатель ДИД-0.5ТА (напряжение питания около 27 В, частота вращения – до 400 Гц) имеет небольшую мощность и широко применяется в системах автоматики. Чтобы привести его в движение и отрегулировать частоту вращения вала можно использовать следующую схему.
Рис. 3. Схема двигателя
По сути она представляет собой три разделенных генератора частоты (ключа) на базе логических элементов.
За регулировку отвечает резистор R2. Такая схема не подойдет для запуска асинхронных двигателей, работающих от трехфазного напряжения 380 В.
Для этих целей можно использовать адаптированную схему.
Рис. 4. Адаптированная схема
Здесь блоки выходных ключей A2 и А3 изображены схематично, так как полностью дублируют блок А1.
Программировать здесь ничего не нужно.
Более сложные реализации
Многие производители предлагают специальные контроллеры, на базе которых управление асинхронными двигателями существенно упрощается.
Один из таких вариантов – контроллер MC3PHAC.
Рекомендуемая производителем схема подключения.
Рис. 5. Схема подключения
Реализация платы частотного преобразователя может быть, например, такой.
Рис. 6. Реализация платы частотного преобразователя
Обмен данными по последовательному интерфейсу RS232 с персональным компьютером не обязателен. Схема может работать автономно.
Управляющие сигналы и процедуры инициализации можно уточнить в даташите производителя.
Еще один вариант с готовой прошивкой для микроконтроллера
Схема использовалась для питания трехфазного двигателя на пилораме (наверное, самый популярный способ использования трехфазных двигателей).
Рис. 7. Схема для питания трехфазного двигателя
Блок питания к ней.
Рис. 8. Схема блока питания
Вариант печатной платы.
Рис. 9. Печатная плата
Частота может регулироваться в диапазоне 2,5-50 Гц с шагом 1,25. ШИМ – 1700 – 3300 Гц. Мощность двигателя – не более 4 кВт.
После одиночного короткого нажатия на кнопку “пуск” подается пусковая частота – 10 Гц. А удерживание инициирует дальнейший разгон до 50 Гц (в течении приблизительно 2 секунд).
Прошивка для контроллера PIC16F628(A) здесь.
Автор: RadioRadar
претендует на оригинальность и писатель из меня честно говоря плохой. Итак обо всем по порядку.
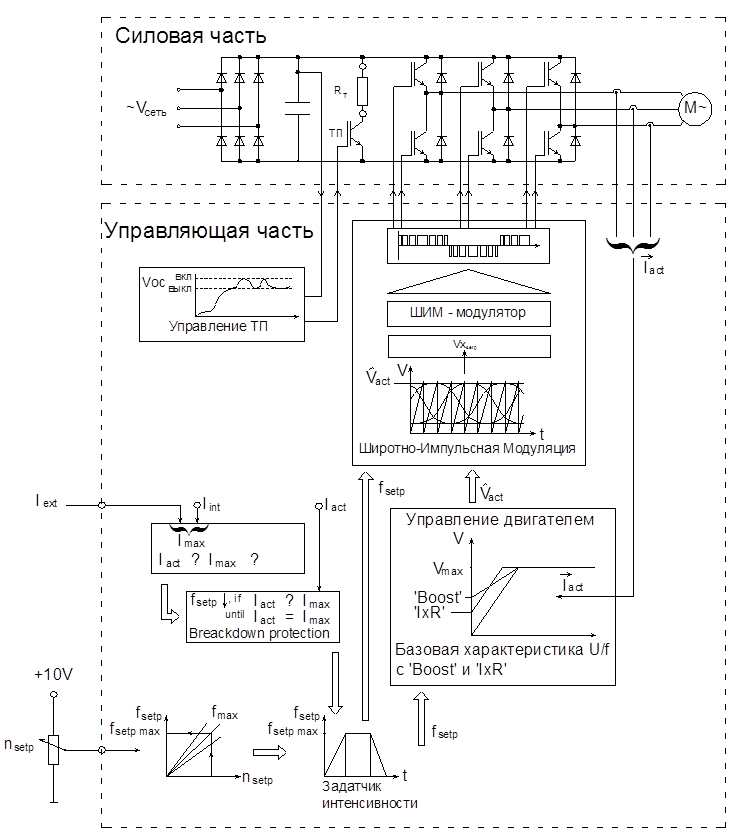
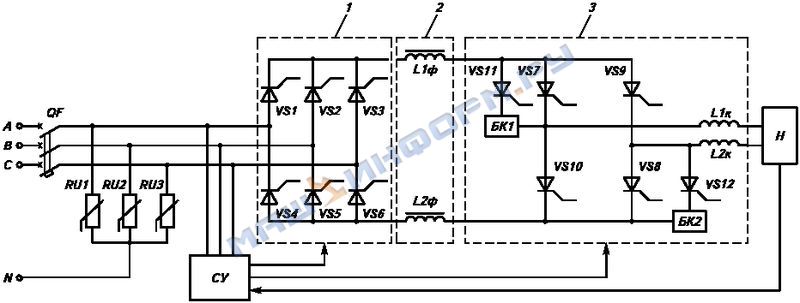
Начнем с общей структурной схемы.
Данная структурная схема построена по так называемой схеме двойного преобразования. Трехфазное напряжение 380В частотой 50 Гц поступает на вход неуправляемого выпрямителя. На выходе выпрямителя напряжение составляет около 540 В. Это и есть первый этап преобразования. На втором этапе напряжение при помощи инвертора преобразуется в широтно-модулированные импульсы, которые и поступают на обмотки электродвигателя. Статорные обмотки имеют активно-индуктивный характер сопротивления и являются фильтрами, сглаживающими ток. Среднее значение тока будет зависеть от среднего значения приложенного напряжения, то есть от соотношения длительностей внутри периода ШИМ. Блок управления реализует основные алгоритмы управления инвертором. Обеспечивает диагностику силового модуля, а также выполняет функции противоаварийной защиты. Блок питания предназначен для питания цепей управления.
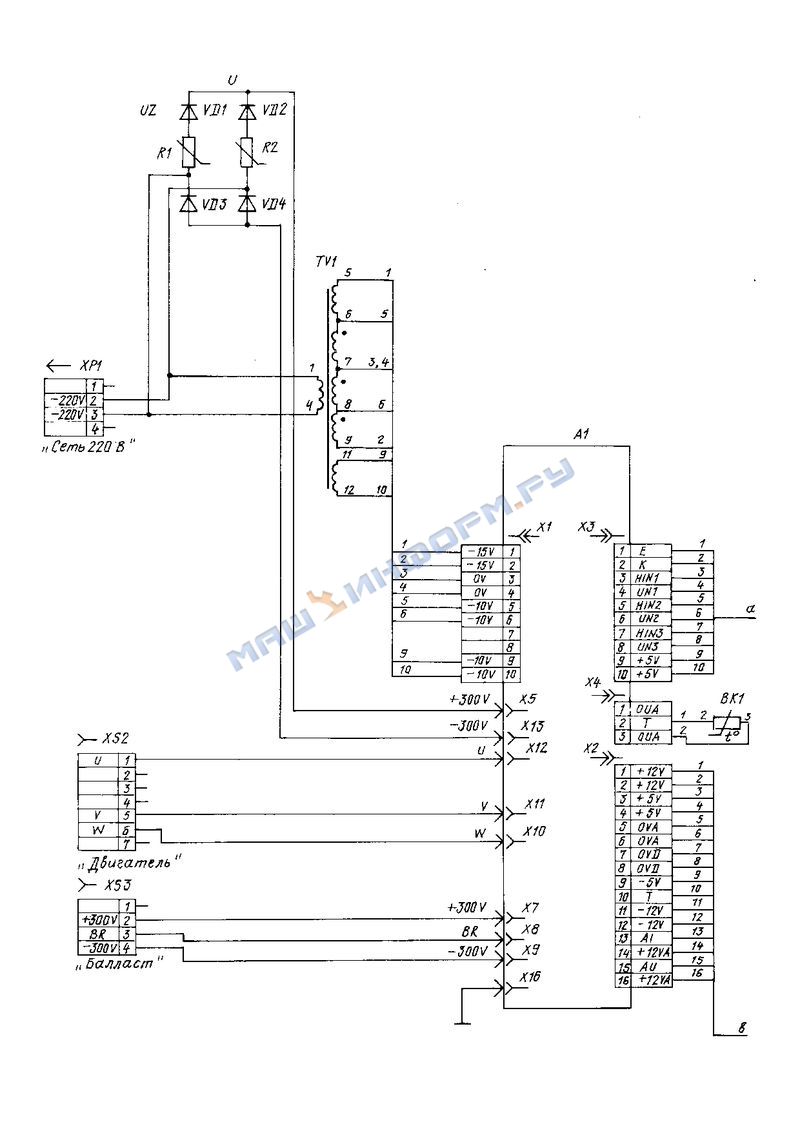
Выпрямитель.
Схема выпрямителя предельно проста.
На вход силового блока поступает трехфазное напряжение сети амплитудой 380 В, и частотой 50 Гц. Для защиты от перенапряжения в схеме используются варисторы VR1- VR3. Далее входное напряжение поступает на выпрямитель с промежуточным звеном постоянного тока. Выпрямитель 36МТ160 представляет собой трехфазную мостовую схему (т.н схема Ларионова) конструктивно выполненную в одном модуле.
Во время зарядки конденсатора промежуточного контура протекает очень большой кратковременный ток. Это может вывести из строя выпрямитель. Ток зарядки ограничивается включением балластного резистора R4 последовательно с конденсаторами DC-звена, который активизируется только при включении преобразователя. После зарядки конденсаторов резистор шунтируется, контактными реле К1. Большая емкость конденсаторов требуется для сглаживания напряжения промежуточного звена. После выключения инвертора из сети, конденсаторы сохраняют высокое напряжение в течение определенного времени.
Вот что получилось в итоге.
Блок питания.
Собран на микросхеме UC3843. Вообще, что касается блока питания, то вовсе не важно какой будет использован.
Хоть самодельный хоть купленный. Главное, на мой взгляд, по возможности питание драйвера IGBT и питания блока управления было от отдельных обмоток трансформатора.
Схема.
Фото.
Инвертор.
Схема инвертора.
IGBT-драйвер собран на транзисторах FGA25N120 и связке оптопары TLP250 и микросхемы TC4420. Что касается микросхемы TC4420 то ее мне посоветовал использовать один мой друг который занимается усилителями «класса D».
Готовый инвертор.
Подопытный кролик Электродвигатель.
Двигатель взял для начала малой мощности. Закрепил на нем инкрементальный энкодер «RO6345» фирмы «IFM».
Все это протестировано, проверено и ждет изготовления блока управления. Будем надеется что у меня хватит терпения, времени и сил довести этот проект до работающего прототипа.
Продолжение следует…
Частотный преобразователь
27.05.2019Частотный преобразователь напряжения — это электрический прибор, служащий для преобразования напряжения и частоты переменного тока в напряжение с заданной амплитудой и частотой. Он также способен преобразовывать постоянное напряжение в переменное с заданными характеристиками.
 Частотные преобразователь Toshiba
Частотные преобразователь ToshibaДля чего нужен частотный преобразователь?
Этот вопрос задают множество людей, которым впервые понадобилось подключить трехфазный двигатель насоса или вентилятора. Конечно, любой электродвигатель можно напрямую подключить к сети переменного тока через соответствующую защитную аппаратуру (моторный автоматический выключатель или контактор с тепловым реле).
 Насос водяной
Насос водяной  Канальный вентилятор
Канальный вентиляторРассмотрим процессы, происходящие в электродвигателе в момент прямого пуска с помощью автоматического выключателя или кнопки включения контактора на примере обычного трехфазного асинхронного двигателя.
На статорные обмотки электродвигателя подается переменное напряжение, которое генерирует соответствующее электромагнитное поле этих обмоток. Это поле, направленное в сторону ротора, в свою очередь заставляет генерироваться электрический ток в короткозамкнутых витках ротора. Затем ток в обмотках ротора генерирует ответное магнитное поле, которое и приводит к движению ротора относительно статора. Все эти процессы, возникающие в момент пуска, называются процессом намагничивания статора и ротора.
 Асинхронный электрический двигатель
Асинхронный электрический двигательТрехфазный электродвигатель сам по себе не нужен: на его валу обязательно присутствует нагрузка (самая простая – в виде лопастей вентилятора). В ситуации с нагруженным конвейером всё сложнее. Тем не менее, у этой нагрузки есть момент инерции – момент, который необходимо преодолеть двигателю для запуска вращения вала. Таким образом, все эти электромагнитные и механические силы в момент пуска напрямую соотносятся с обычным пусковым током двигателя. Как несложно догадаться, этот ток будет в несколько раз (2-7) больше номинального тока двигателя, который получится в установившемся режиме работы.
Скорость вращения электродвигателя или число оборотов в минуту
Скорость вращения вала как асинхронных, так и синхронных электродвигателей определяется частотой вращения магнитного поля статора. Магнитное поле вращается соответственно подаваемому на обмотки статора переменному току по трем фазам. Именно это «вращение» электрического тока в статоре приводит к вращающемуся магнитному полю и определяется по формуле:
n = (60 • f / p) • (1 – s)
где n – номинальное число оборотов вала асинхронного электродвигателя, p – число пар полюсов (см. на паспортной табличке), s – скольжение (разность скоростей поля ротора и поля статора), f – частота переменного тока (например, 50 Гц). Число пар полюсов статора зависит от конструкции катушек статора. Скольжение зависит от нагрузки на валу электродвигателя. Таким образом, подключив электродвигатель к сети переменного тока, мы получим вращение с постоянной скоростью.
Зачем нужно регулировать скорость и как это делается?
Заданное в паспортной табличке число оборотов двигателя на 1 минуту не всегда устраивает потребителя. Иногда скорость механизма хочется уменьшить, а давление в трубе наоборот поднять. Возникает потребность в изменении частоты вращения вала электродвигателя. Как видно из формулы выше, наиболее простой способ изменения частоты вращения вала электродвигателя –изменить частоту переменного тока f.
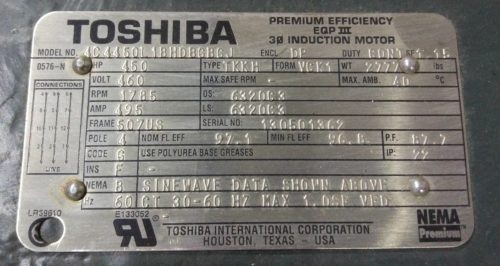 Шильдик электродвигателя EQPIII Toshiba
Шильдик электродвигателя EQPIII ToshibaПринцип работы частотного преобразователя
Вот тут и приходит на помощь частотный преобразователь, иначе говоря ЧРП (частотно-регулируемый привод). Он, как говорилось в самом начале, позволяет задавать на своем выходе заданные в настройках амплитуду напряжения и частоту переменного тока.
Частота вы выходе может регулироваться в диапазоне 0.01 – 590 Гц если брать инверторы серии AS3 Toshiba. Для серии S15 Toshiba диапазон регулирования находится в пределах 0.01 – 500 Гц. Для серии nC3E Toshiba диапазон регулирования находится в пределах 0.01 – 400 Гц. Это объясняется функциональным назначением разных серий ПЧ.
Напряжение на выходе может изменяться в диапазоне от 0 В до напряжения питания ПЧ, т.е. текущего напряжения на входе частотного преобразователя. Это свойство можно использовать для получения нужного выходного напряжения и частоты, что ценно, например, для испытания стендового оборудования. Правда для этого придется использовать специальный выходной синусный фильтр, чтобы получить чистые синусоидальное напряжение и ток.
С частотой все понятно, но зачем нужно изменять напряжение?
Дело в том, что для поддержания определенного магнитного поля в обмотках статора требуется изменять не только частоту, но и напряжение. Получается, что частота должна соответствовать определенному напряжению. Этот называется законом скалярного управления U/f (V/f), где U или V – напряжение.
Также существует закон векторного регулирования. Векторное регулирование используется для оборудования, где требуется поддерживать необходимый крутящий момент на валу при низких скоростях электродвигателя, высокое быстродействие и точность регулирования частоты вращения. Векторное управление представляет собой математический аппарат в «мозге» частотного преобразователя, который позволяет точно определять угол поворота ротора по токам фаз двигателя.
Использование частотника позволяет убрать большой пусковой ток, достигая таким образом значительного экономического эффекта при частых пусках и остановках электродвигателя.
Схема частотного преобразователя
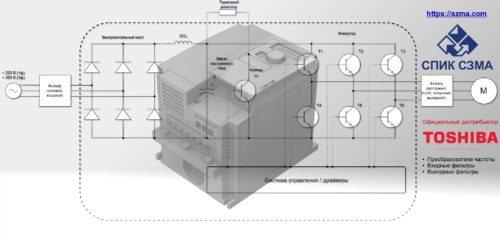
Ниже представлена типовая схема частотного преобразователя. Входное сетевое трехфазное или однофазное напряжение подается через опциональный входной фильтр на клеммы диодного моста. Неуправляемый диодный (или управляемый тиристорный) мост преобразует переменное напряжение сети в постоянное пульсирующее напряжение. Для фильтрации пульсаций служит звено постоянного тока из одного или нескольких конденсаторов C.
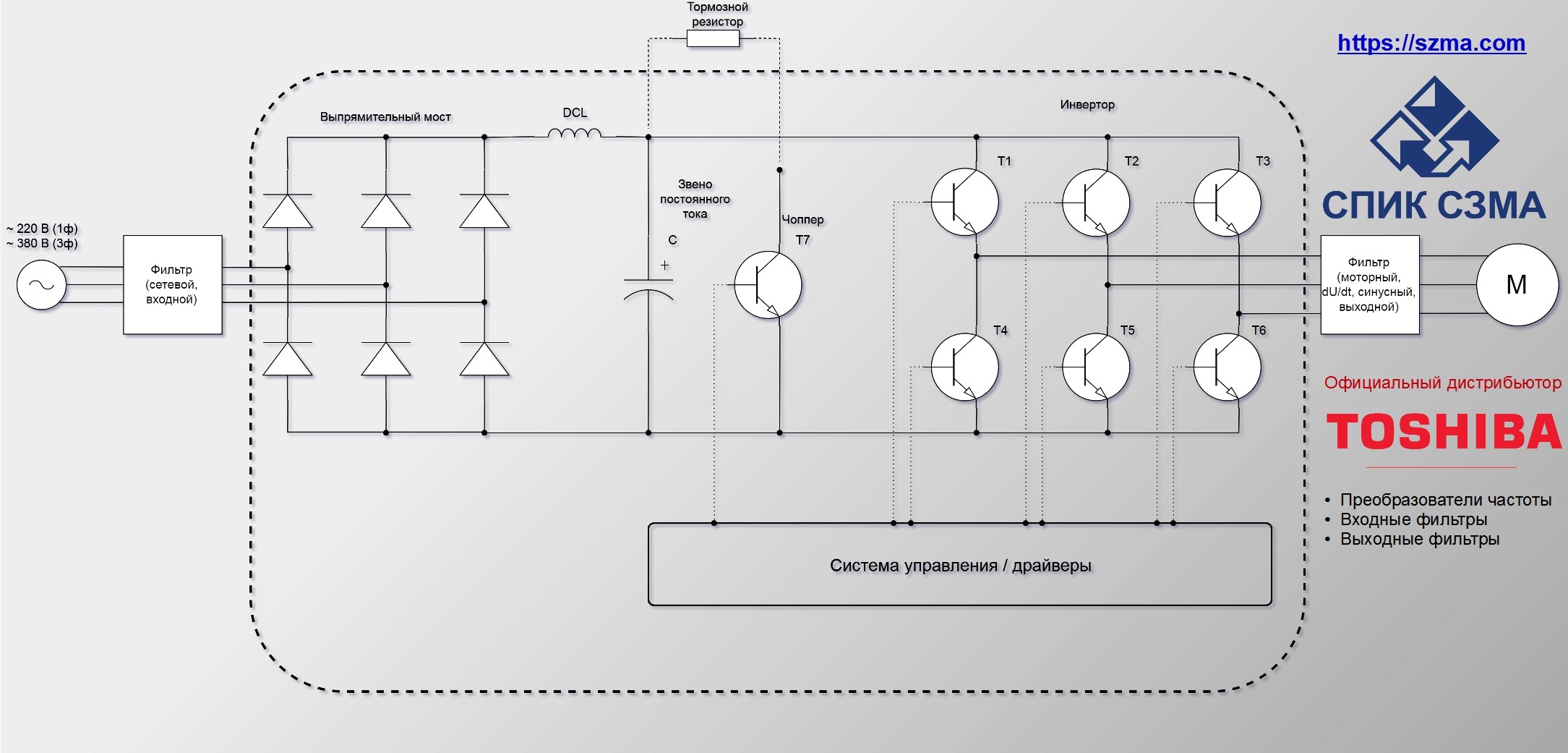 90000 What is Frequency Converter? How it works? 90001 Variable frequency operation has been around, in the form of the AC generator, since the advent of the induction motor. Change the rotational speed of a generator and you change its output frequency. Before the advent of high speed transistors, this was one of the few options available to vary motor speed, however, frequency changes were limited because generator speed reduction lowered the output frequency but not the voltage. We will see why this is important a little later.In our industry, variable speed pumping applications were far more complex in the past than they are today. One of the simpler methods was to employ a multi-pole motor that was wound in such a way that allowed a switch (or switches) to vary the number of stator poles that were active at any given time. Rotational speed could be changed manually or by a sensor connected to the switches. Many variable flow pumping applications still employ this method. Examples include hot & chilled water circulators, pool pumps, and cooling tower fans & pumps.Some domestic booster pumps used fluid drive or variable belt drive systems (an automatic transmission of sorts) to vary pump speed based on feedback from a pressure diaphragm valve. And, several others were even more complex. 90002 Based upon the hoops we had to jump through in the past, it becomes pretty apparent why the advent of the modern frequency converter revolutionized (yet another pun) the variable speed pumping environment. All you have to do today is install a relatively simple electronic box (that often replaces more complex starting equipment) at the application site and, suddenly you can, either manually or automatically, change pump speed to your heart’s desire.90003 90002 So, lets take a look at the components of a frequency inverter and see how they actually function together to vary frequency and thus motor speed. I think you will be amazed at the simplicity of the process. All it took was the maturing of the solid state device we know as the transistor. 90003 90002 90007 Frequency converter Components 90008 90003 90002 90007 The Rectifier 90008 90013
Because it is difficult to change the frequency of an AC sine wave while in the AC mode, the first job of a frequency converter is to convert the wave to DC.As you will see a little later, it is relatively easy to manipulate DC in order to make it look like AC. The first component of all frequency converters is a device known as a rectifier or converter and it is shown to the left of the figure below. 90013
90003 90002 The rectifier circuit converts AC to DC and does so in much the same manner as those of a battery charger or arc welder. It uses a diode bridge to limit the travel of the AC sine wave to one direction only. The result is a fully rectified AC wave form that is interpreted by a DC circuit as a native DC wave form.Three phase frequency converters accept three separate AC input phases and convert them to a single DC output. Most three phase frequency converters can also accept single phase (230V or 460V) power but, since there are only two incoming legs, the frequency converters output (HP) must be derated because the DC current produced is reduced proportionally. On the other hand, true single phase frequency converters (those that control single phase motors) utilize a single phase input and produce a DC output that is proportional to the input.90003 90002 There are two reasons why three phase motors are more popular than their single phase counter parts when it comes to variable speed operation. First they offer a much wider power range. But, equally as important is their ability to begin rotation on their own. A single phase motor, on the other hand, often requires some outside intervention to begin rotation. In this case, we will limit our discussion to three phase motors used on three phase frequency converters. 90003 90002 90007 The DC Bus 90008 90013
The second component, known as the DC Bus (shown in the center of the illustration) is not seen and in all frequency converters because it does not contribute directly to variable frequency operation.But, it will always be there in high quality, general purpose frequency converters (those manufactured by dedicated frequency converter manufacturers). Without getting into a lot of detail, the DC Bus uses capacitors and an inductor to filter the AC “ripple” voltage from the converted DC before it enters the inverter section. It can also include filters which impede harmonic distortion that can feed back into the power source supplying the frequency converter. Older frequency converters and some pump specific frequency converters require separate line filters to accomplish this task.90003 90002 90007 The Inverter 90008 90013
To the right of the illustration is the “guts” of the frequency converter. The inverter uses three sets of high speed switching transistors to create DC “pulses” that emulate all three phases of the AC sine wave. These pulses not only dictate the voltage of the wave but also its frequency. The term inverter or inversion means “reversal” and simply refers to the up and down motion of the generated wave form. The modern frequency converter inverter uses a technique known as “Pulse Width Modulation” (PWM) to regulate voltage and frequency.We will cover this in more detail when we look at the output of the inverter. 90003 90002 Another term you have probably run across when reading frequency converter literature or advertisements is “IGBT”. IGBT refers to the “Insulated Gate, Bipolar Transistor” which is the switching (or pulsing) component of the inverter. The transistor (which replaced the vacuum tube) serves two functions in our electronic world. It can act as an amplifier and increase a signal as it does in a radio or stereo or, it can act as a switch and simply turn a signal on and off.The IGBT is simply a modern version that provides higher switching speeds (3000 – 16000 Hz) and reduced heat generation. The higher switching speed results in increased accuracy of AC wave emulation and reduced audible motor noise. A reduction in generated heat means smaller heat sinks and thus a smaller frequency converter footprint. 90003 90002 90007 Inverter Output 90008 90013
The illustration to the right shows the wave form generated by the inverter of a PWM frequency converter compared with that of a true AC sine wave.The inverter output consists of a series of rectangular pulses with a fixed height and adjustable width. In this particular case there are three sets of pulses – a wide set in the middle and a narrow set at the beginning and end of both the positive and negative portions of the AC cycle. The sum of the areas of the pulses equals the effective voltage of a true AC wave (we will discuss effective voltage in a few minutes). If you were to chop off the portions of the pulses above (or below) the true AC wave and use them to fill in the blank spaces under the curve, you would find that they match almost perfectly.It is in this manner that a frequency converter controls the voltage going to the motor. 90003 90002 The sum of the width of the pulses and the blank spaces between them determines the frequency of the wave (hence PWM or pulse width modulation) seen by the motor. If the pulse was continuous (i.e. no blank spaces), the frequency would still be correct but the voltage would be much greater than that of the true AC sine wave. Depending upon the desired voltage and frequency, the frequency converter will vary the height and width of the pulse and the width of the blank spaces in between.Although the internals that accomplish this are relatively complex, the result is elegantly simple! 90003 90002 Now, some of you are probably wondering how this “fake” AC (actually DC) can run an AC induction motor. After all, does not it take an alternating current to “induce” a current and its corresponding magnetic field in the motor’s rotor? Well, AC causes induction naturally because it is continuously changing direction. DC, on the other hand, does not because it is normally motionless once a circuit is activated.But, DC can induce a current if it is switched on and off. For those of you old enough to remember, automobile ignition systems (prior to the advent of the solid state ignition) used to have a set of points in the distributor. The purpose of the points was to “pulse” power from the battery into the coil (a transformer). This induced a charge in the coil which then increased the voltage to a level that would allow the spark plugs to fire. The wide DC pulses seen in the previous illustration are actually made up of hundreds of individual pulses and, it is this on and off motion of the inverter output that allows induction via DC to occur.90003 90002 90007 Effective Voltage 90008 90013
AC power is a rather complex quantity and it is no wonder that Edison almost won the battle to make DC the standard in the US. Fortunately, for us, all of its complexities have been explained and all we have to do is follow the rules those before us have laid out. 90003 90002 One of the attributes that makes AC complex is that it changes voltage continuously, going from zero to some maximum positive voltage, then back to zero, then to some maximum negative voltage, and then back to zero again.How is one to determine the actual voltage applied to a circuit? The illustration on the left is that of a 60 Hz, 120V sine wave. Notice, however, that its peak voltage is 170V. How can we possibly call this a 120V wave if its actual voltage is 170V? During one cycle it starts at 0V and rises to 170V then falls again to 0. It continues falling to -170 and then rises again to 0. It turns out that the area of the green rectangle, whose top border is at 120V, is equal to the sum of the areas under the positive and negative portions of the curve.Could 120V then be the average? Well, if you were to average all of the voltage values at each point across the cycle, the result would be approximately 108V so that must not be the answer. Why then is the value, as measured by a VOM, 120V? It has to do with something we call “effective voltage”. 90013
90013
If you were to measure the heat produced by a DC current flowing through a resistance, you would find that it is greater than that produced by an equivalent AC current. This is due to the fact that AC does not maintain a constant value throughout its cycle.If you did this in the laboratory, under controlled conditions, and found that a particular DC current generated a heat rise of 100 deg, its AC equivalent would produce a 70.7 deg rise or just 70.7% of the DC value. Therefore the effective value of AC is 70.7% of that of DC. It also turns out that the effective value of an AC voltage is equal to the square root of the sum of the squares of the voltage across the first half of the curve. If the peak voltage is 1 and you were to measure each of the individual voltages from 0 deg to 180 deg, the effective voltage would be 0.707 of the peak voltage. 0.707 times the peak voltage of 170 seen in the illustration equals 120V. This effective voltage is also known as the root mean square or RMS voltage. It follows that the peak voltage will always be 1.414 that of the effective voltage. 230V AC current has a peak voltage of 325V while 460 has a peak voltage of 650V. We will see the effects of peak voltage a little later. 90003 90002 Well, I have probably gone on about this longer than necessary but, I wanted you to gain an understanding of effective voltage so that you will understand the illustration below.In addition to varying frequency, a frequency converter must also vary voltage even though voltage has nothing to do with the speed at which an AC motor operates. 90013
90013
The illustration shows two 460V AC sine waves. The red one is a 60hz curve while the blue one is 50hz. Both have a peak voltage of 650V but, the 50hz is much broader. You can easily see that the area under the first half (0 – 10 ms) of the 50hz curve is greater than that of the first half (0 – 8.3 ms) of the 60hz curve.And, since the area under the curve is proportional to effective voltage, its effective voltage is higher. This increase in effective voltage becomes even more dramatic as frequency decreases. If a 460V motor were allowed to operate at these higher voltages, its life could be decreased substantially. Therefore, the frequency converter must constantly vary “peak” voltage, with respect to frequency, in order to maintain a constant effective voltage. The lower the operating frequency, the lower the peak voltage and vice versa.It is for this reason that 50hz motors, used in Europe and parts of Canada, are rated for 380V. See, I told you that AC can be a bit complex! 90003 90002 You should now have a pretty good understanding of the workings of a frequency converter and how it controls the speed of a motor. Most frequency converters offer the user the ability to set motor speed manually via a multi-position switch or keypad, or use sensors (pressure, flow, temperature, level etc) to automate the process. 90013 90003.90000 Frequency Converter – Power Frequency Changer 90001 90002 WHAT IS A FREQUENCY CONVERTER? 90003
90004 A frequency converter, also known as a power frequency changer, is a device that takes incoming power, normally 50 or 60 Hz and converts it to 400 Hz output power. Different types of power frequency converters exist, specifically, there are both rotary frequency converters and solid state frequency converters. Rotary frequency converters use electrical energy to drive a motor.Solid-state frequency converters take the incoming alternating current (AC) and convert it to direct current (DC). 90005
90006 90007 What is the purpose of a power frequency converter for commercial utility? 90008 90009
90004 Standard commercial utility power is alternating current (AC) power. AC refers to the number of cycles per second ( ‘hertz “or Hz) that the power fluctuates, positive and negative, around a neutral datum. Two standards exist in the world, 50 hertz and 60 hertz. 50 Hz is prevalent in Europe, Asia, and Africa, while 60 Hz is the standard in most of North America and some other countries (Brazil, Saudi Arabia, South Korea) around the world.90005
90004 There is no inherent advantage to one frequency over another frequency. But there can be significant disadvantages. Problems occur when the load being powered is sensitive to the input power frequency. For example, motors spin at a multiple of the power frequency. Thus, a 60 Hz motor will spin at 1800 or 3600 RPM. However, when 50 Hz power is applied, the RPM is 1500 or 3000 RPM. Machines tend to be speed-sensitive, so the power to run them must correspond to the design RPM intended.Thus, a typical piece of European machinery needs 50 Hz input, and if it runs in the United States, a 60-to-50 Hz converter is required to convert the available 60 Hz power to 50 Hz. The same applies vice versa to convert 50 Hz power to 60 Hz. While standard power ratings and capacities exist for frequency changers, our converters operate over a range of voltages from 100V to 600V. The most commonly specified voltages are 110V, 120V, 200V, 220V, 230V, 240V, 380V, 400V, and 480V. Because our standard and custom design capabilities can meet a range of power system needs, Georator is your supplier for frequency to voltage converters.90005 90006 WHY DOES A FREQUENCY CONVERTER COST SO MUCH? 90009
90004 90017 A lot of clients suffer “sticker shock” when looking to by a frequency converter. It makes little difference if the power frequency converter is a rotary unit (motor-generator set) or a solid state (electronic) unit. And, in fact, the cost spread among vendors is surprisingly small. 90005
90004 So what makes frequency converters so expensive? Well, it’s a law. Specifically, the laws of physics.90005
90004 Unlike voltage conversion, which only requires a rather passive transformer, a frequency converter must completely remake the power in order to change the frequency. In a rotary converter, incoming electrical energy is converted to mechanical power in the drive motor. That rotational power then feeds a generator, where the rotational energy is reconverted to electrical output. Lots of moving parts, lots of hardware, lots of costs. 90005
90004 In a similar manner, a solid state frequency converter converts incoming AC power into DC, by the use of a rectifier.The DC energy is then reconverted into AC power by the use of an inverter section. Again, lots of parts, lots of costs. 90005
90004 One positive side benefit of either type of frequency converter is that any desired voltage conversion occurs “for free” as part of the frequency conversion process. Unfortunately, this is often little consolation to our clients. 90005
90004 Sorry, it’s just the law. 90005
90006 DO I REALLY NEED A FREQUENCY CONVERTER? 90009
90004 When potential clients are faced with buying a frequency converter, ours or those of our competitors, they often find the cost to be a major impediment.Do they really need the frequency converter? Well, the answer lies in what type of load is being served. 90005
90004 90034 Applications involving motor loads often need a power frequency converter because the rotational characteristics, specifically revolutions per minute (RPM), are a direct function of the input frequency of the electricity. A 60 Hz motor will spin at some multiple of 60, e.g., 1800 RPM. Concurrently, a 50 Hz motor will spin at a multiple of 50, e.g. 1500 RPM. Thus, when dealing with a motor load, especially in a multi-motor machine, it may be quite necessary to use a frequency converter to ensure that the motors spin in accordance to the original rotational design.90005
90004 However, resistive loads, such a resistance heaters and some lights, do not care what the frequency of the incoming power is. So if the load is restive, no frequency conversion may be necessary. The only caveat is that the voltage must be in the right range. Even if only a major portion of the load is resistive, it may be more economical to split the load into parts, and only feed the frequency-dependent component with a converter. 90005
90004 It’s also wise to consider replacing motor (s) in the load to the proper frequency, as this may yield a less costly solution than using a frequency converter.90005
90004 Georator application engineers are available to discuss these issues with you; contact our team for assistance. While we value your business, we do not want to sell you something you do not need. 90005
.90000 Frequency Converter 90001 90002 Click to reload page with unique web address for bookmarking or sharing current settings 90003 90002 ✕ clear settings 90003 Sorry, a graphic could not be displayed here, because your browser does not support HTML5 Canvas. 90006 Related Tools 90007 90006 User Guide 90007
90002 This conversion tool will convert a frequency value into different measurement units and display conversion scale related to the converted value. 90003
90002 Frequency is used to measure physical actions that are cyclic in nature, that follow a pattern which repeats many times such as oscillations and rotational movement.90003
90002 Frequency is typically defined as the number of cycle completed in a unit period of time, where the SI unit for frequency which is the Hertz equals 1 cycle per second. 90003
90002 In rotational motion other units are used such as revolutions per minute (rpm), radians per second (rad / s) and degrees per minute (deg / min). 90003
90018 Frequency Applications 90019
90002 Frequency is measured in many applications which include: 90003
90022
90023 Sound Waves 90024
90023 Electromagnetism 90024
90023 Electricity 90024
90023 Light Waves 90024
90023 Resonance 90024
90023 Rotational Motion 90024
90035
90018 Conversion Factors 90019
90002 The following units of frequency converted into Hertz (SI units for frequency) are used by this frequency conversion tool: 90003
90022
90023 attohertz (aHz) – 1 x 10 90042 -18 90043 Hz 90024
90023 femtohertz (fHz) – 1 x 10 90042 -15 90043 Hz 90024
90023 picohertz (pHz) – 1 x 10 90042 -12 90043 Hz 90024
90023 nanohertz (nHz) – 0.000000001 Hz 90024
90023 microhertz (μHz) – 0.000001 Hz 90024
90023 millihertz (mHz) – 0.001 Hz 90024
90023 centihertz (cHz) – 0.01 Hz 90024
90023 decihertz (dHz) – 0.1 Hz 90024
90023 hertz (Hz) – 1 Hz 90024
90023 decahertz (daHz) – 10 Hz 90024
90023 hectohertz (hHz) – 100 Hz 90024
90023 kilohertz (kHz) – 1,000 Hz 90024
90023 megahertz (MHz) – 1,000,000 Hz 90024
90023 gigahertz (GHz) – 1,000,000,000 Hz 90024
90023 terahertz (THz) – 1 x 10 90042 +12 90043 Hz 90024
90023 petahertz (PHz) – 1 x 10 90042 +15 90043 Hz 90024
90023 exahertz (EHz) – 1 x 10 90042 +18 90043 Hz 90024
90023 revs / hour (rph) – 2.7 x 10 90042 -4 90043 Hz 90024
90023 revs / minute (rpm) – 0.016 Hz 90024
90023 revs / second (rps) – 1 Hz 90024
90023 radians / hour (rad / hr) – 4.420970641 … x 10 90042 -5 90043 Hz 90024
90023 radians / minute (rad / min) – 2.652582385 … x 10 90042 -3 90043 Hz 90024
90023 radians / second (rad / s) – 0.1591549431 … Hz 90024
90023 degrees / hours (deg / hr) – 7.716049382 x 10 90042 -7 90043 Hz 90024
90023 degrees / minute (deg / min) – 4.629 x 10 90042 -5 90043 Hz 90024
90023 degrees / second (deg / sec) – 2.7 x 10 90042 -3 90043 Hz 90024
90035
.90000 Frequency Converter Basics 90001 To realize high efficiency, great manageability and energy saving in industrial induction motor related applications, it is necessary to adopt controllable frequency converter systems. Frequency converter system nowadays is AC motor fed by a static frequency converter. The up-to-date frequency converter works great for AC motor applications and easy installation. One important issue, however, is caused by the non-sinusoidal output voltage. This factor has caused a lot of undesirable problems.Increased induction motor losses, noise and vibrations, detrimental impact on the induction insulation system, and bearing failure are examples of frequency converter related systems ‘issues. Increased induction losses mean a de-rating of the induction output power to prevent overheating. Measurement in the lab shows that temperature rises may be 40% higher with frequency converter compared with general power supplies. Continuous research and enhancement of frequency converters have solved many of these issues.Unfortunately, it seems that solving one problem has accented another. Reducing the induction and frequency converter losses tends to increase the detrimental impact on the insulation. The induction manufacturers are, of course, aware of this. New induction designs (inverter-resistant motors) are beginning to appear on the market. Better stator winding insulation and other structural improvements ensure induction motors that will be better adapted for frequency converter applications. 90002 90003 Introduction 90004 90005
One of the most serious problems to the induction motor has been the difficulty of adapting it to speed adjusting.The synchronous speed of an AC motor is determined by the following equation. 90005
90007 90008
n 90009 s 90010 = 120 * f / p 90005
90012
n 90009 s 90010 = synchronous speed 90005
f = power grid frequency 90005
p = pole number 90002 The only way to adjust the speed, for a given pole number is to change the frequency. 90007 90002 90003 The basic principle 90004 90005
In theory, the basic idea is simple, the process of transforming the stable power-line frequency into a variable frequency is basically done in two steps: 90005
90007 90025
90026
The AC power source is rectified into a DC voltage.90027
90026
The DC voltage is chopped up into an AC voltage of the desired frequency.
90027
90030
A frequency converter basically consists of three blocks: the rectifier, the DC-link, and the inverter. 90005
90002 90003 Different types of frequency converters 90004 90005
90036 PWM Voltage Source Inverter (VSI) 90037 90005
The PWM (Pulse Width Modulation) is widely applied in the frequency converter industry. They are available from a several hundred watts up to megawatts.90005
90007 90002 A PWM converter does not have to match the load exactly, it need only make sure that the load does not consume current higher than the PWM converter is rated for. It is quite possible to run a 20 kW induction with a 100 kW PWM converter. This is a great benefit that makes operation easier for the application. 90007 90002 Nowadays, the PWM frequency converter is using Insulated Gate Bipolar Translator (IGBT). Modern PWM frequency converters perform very well, and are not far behind designs using a sinusoidal power supply – at least not in the power range up to 100 kW or so.90007 90002 90036 Current Source Inverter (CSI) 90037 90005
The current source inverter is a rough and rather simple design compared with the PWM. It uses simple thyristors or SCRs in the power circuits, which makes it much cheaper. It has also benefit of being very reliable. The design makes it short-circuit proof because of the large inductors in the DC link. It is bulkier than the PWM. 90005
90007 90002 Earlier, the current source inverter was the best choice for big loads. A disadvantage with the current source inverter is the need of matching to the load.The frequency converter has to be designed for the induction motor used. In fact, the induction itself is a part of the inverted circuit. 90007 90002 The current source inverter supplies the induction motor with a square-shaped current. At low speeds, the induction produces a cogging torque. This type of frequency converter will generate more noise on the supply source compared to the PWM converter. Filtering is necessary. 90007 90002 Heavy voltage transients in the output voltage are an additional disadvantage of the current source inverter.The transients can reach nearly twice the nominal voltage in the worst cases. There is also a risk that the winding insulation will be worn out prematurely, if this frequency converter is used. This effect is most serious when the load does not match the frequency converter properly. This can happen when running at part load. This kind of frequency converter is losing its popularity more and more. 90007 90002 90036 Flux Vector Control (FVC) 90037 90005
A flux vector control is a more sophisticated type of frequency converter that is used in applications having extreme control demands.In paper mills for example, it is necessary to control speed and stretching forces very precisely. 90007 90002 A FVC frequency converter always has some kind of feedback loop. This kind of frequency converter is generally of minor interest in pump applications. It is expensive, and its benefits can not be taken advantage of. 90007 90002 90003 Effect on the motor 90004 90005
An induction works best when supplied with a pure sinusoidal-voltage source. This is mostly the case when connected to a robust utility power source.90007 90002 When an induction is connected to a frequency converter, it will be supplied with a non-sinusoidal voltage-more like a chopped square voltage. If we supply a 3-phase induction with a symmetrical 3-phase square voltage, all the harmonics that are multiples of three, as well as the even numbers, will be eliminated because of symmetry. But, still left are the numbers 5; 7 and 11; 13 and 17; 19 and 23; 25 and so on. For each pair of harmonics, the lower number is reverse rotating and the higher number is forward rotating.90007 90002 The speed of the induction motor is determined by the fundamental number, or number 1, because of its strong dominance. Now what happens to the harmonics? 90007 90002 From the point of view of harmonics, the induction seems to have the rotor blocked, which means that the slip is approximately 1 for the harmonics. These provide no useful work. The result is mostly rotor losses and extra heating. In our application in particular, this is a serious outcome. With modern technology, however, it is possible to eliminate much of the harmonic content in the induction current, thereby reducing the extra losses.90007 90002 90003 Frequency converter before 90004 90005
The earliest frequency converters often used a simple square voltage to supply the induction motor. They caused heating-up problems and the inductions ran with a typical noise caused by torque ripple. Much better performance was achieved by simply eliminating the fifth and the seventh. That was done through some extra switching of the voltage signal. 90007 90002 90003 Frequency converter today 90004 90005
Nowadays, the technique is more sophisticated and most of the disadvantages are history.Development of fast power semiconductors and the micro-processor has made it possible to tailor the switching pattern in such a way that most of the harmful harmonics are eliminated. 90007 90002 Switching frequencies up to 20 kHz are available for frequency converters in the medium-power range (up to some tens of kW). The induction current with this type of frequency converter will be nearly sinus shaped. 90007 90002 At a high switching frequency, induction losses are kept low, but losses in the frequency converter will increase.The total losses will become higher at excessively high switching frequencies. 90007 90002 90003 Some motor basic theory 90004 90005
The torque production in an induction motor may be expressed as 90005
90007 90008
T = V * τ * B [Nm] 90005
90012
V = Active rotor volume [m 90098 3 90099] 90005
τ = Current per meter stator bore circumference 90005
B = Flux density in the air gap 90005
90008
B = proportional to (E / ω) = E / (2 * π * f) 90005
90012
ω = angular frequency of the stator voltage 90005
E = induced stator voltage 90002 To obtain the best performance at various speeds, it becomes necessary to maintain an appropriate magnetization level for the induction for each speed.90007 90002 A range of various torque characteristics is shown as following figure. For the constant torque load, the V / F ratio must be constant. For the square torque load, a constant V / F ratio will result in excessively high magnetization at lower speed. This will generate unnecessarily high iron losses and resistance losses (I 90098 2 90099 R). 90005
90007 90002 It is better to use a square V / F ratio. The iron losses and I 90098 2 90099 R losses are thus reduced to a level more acceptable for the actual load torque.90007 90002 If we look at the Figure, we find that the voltage has reached its maximum and can not be increased above the 50Hz base frequency. The range above the base frequency is called the field weakening range. A consequence of this is that it is no longer possible to maintain the necessary torque without increasing the current. This will result in heating-up problems of the same kind as with normal under voltages run from a sinusoidal power grid. The frequency converter’s rated current will likely be exceeded.90007 90002 90003 Running in the field-weakening range 90004 90005
Sometimes, there is a temptation to run the pump at frequencies above the commercial power grid frequency in order to reach a duty point that would otherwise be impossible. Doing so calls for extra awareness. The shaft power for a pump will increase with the cube of speed. An over speed of 10% will require 33% more output power. Roughly speaking, we can expect that the temperature rise will increase by about 75%. 90005
90007 90002 There is, nonetheless, a limit to what we can squeeze out of the induction at over speed.The maximum torque of the induction will drop as a function of 1 / F in the field-weakening range. 90007 90002 It is obvious that the induction will drop out if the frequency converter can not support it with a voltage that corresponds to that needed by the torque. 90007 90002 90003 Derating 90004 90005
In many cases, the induction is run at maximum capacity from a sinusoidal power grid and any extra heating can not be tolerated. If such an induction is powered from a frequency converter of some kind, it most probably must be run at lower output power in order to avoid overheating.90007 90002 It is not unusual that a frequency converter for big pumps above 300 kW will add extra induction losses of 25-30%. In the upper power range, only a few of the frequency converters have a high switching frequency: 500 to тисячі Hz is usual for the former generation of frequency converters. 90007 90002 To compensate for the extra losses, it is necessary to reduce the output power. We recommends a general derating of 10-15% for large pumps. 90007 90002 Since the frequency converter pollutes the supply grid with harmonics, an input filter sometimes is prescribed by the power company.This filter will decrease the available voltage by typically 5-10%. The induction will consequently run at 90-95% of nominal voltage. The consequence is additional heating. Derating might be necessary. 90007 90002 90003 Example 90004 90005
Assume that the output power for the actual pump motor is 300 kW at 50 Hz and the temperature rise is 80 ° C using a sinusoidal power grid. Extra losses of 30% will result in an induction that is 30% warmer. A conservative assumption is that the temperature rise varies with the square of shaft power.90007 90002 In order not to exceed 80 ° C, we have to reduce the shaft power to 90005
90007 90008
P 90009 reduced 90010 = √ (1 / 1.3) * 300 = 263kW 90005
90012
The reduction can be achieved either by reducing impeller diameter or by speeding down. 90002 90003 Frequency converter Losses 90004 90005
When the total efficiency of a frequency converter system is determined, the internal losses of the frequency converters must be included. These frequency converter losses are not constant and not easy to determine.They consist of a constant part and a load dependent part. 90007 90002 90036 Constant losses: 90037 90005
Cooling losses (cooling fan) -losses in the electronic circuits and so on. 90007 90002 90036 Load dependent losses: 90037 90005
Switching losses and lead losses in the power semiconductors. 90007 90002 Following figure shows the frequency converter efficiency as function of the frequency at a cubic load for units rated at 45, 90, and 260 kW. The curves are representative for frequency converters in the power range of 50-300 kW; with the switching frequency equaling about 3 kHz and with an IGBT of the second generation.90005
90007 90002 90003 Effects on motor insulation 90004 90005
The output voltages from modern frequency converters have a very short voltage rise time. 90005
90007 90008
dU / dT = 5000V / μs is a common value. 90005
90012
Such steep voltage slopes will cause undue stress in the insulation materials of the induction winding. With short rise times, voltage in the stator winding is not uniformly distributed. With a sinusoidal power supply, the turn-turn voltage in an induction winding is normally equally distributed.With a frequency converter on the other hand, up to 80% of the voltage will drop across the first and the second turn. Since the insulation between the wires constitutes a weak point, this may prove to be hazardous for the induction. A short rise time also causes voltage reflection in the induction cable. In the worst case, this phenomena will double the voltage across the induction terminals. An induction fed from a 690-volt frequency converter might be exposed to up to 1 900 volts between phases.90002 The voltage amplitude depends on the length of the induction cable and the rise time. With very short rise times, full reflection occurs in a cable 10 to 20 meters in length. 90007 90002 To ensure function and ample motor life time, it is absolutely necessary that a winding be adapted for use with a frequency converter. Inductions for voltages above 500 volts must have some form of reinforced insulation. The stator winding must be impregnated with a resin that ensures an insulation free of bubbles or cavities.Glow discharges often start around cavities. This phenomena will eventually destroy the insulation. 90007 90002 There are ways to protect a motor. Over and above a reinforced insulation system, it might be necessary to insert a filter between the frequency converter and the induction. Such filters are available from most well-known frequency converter suppliers. 90007 90002 A filter will typically slow down the voltage rise time from 90005
90007 90008
dU / dT = 5000V / μs to 500-600V / μs 90005
90012
90003 Bearing failure 90004 90005
Breakdown of rotating machinery can often be related to bearing failure.In addition to excessive heating, insufficient lubrication or metal fatigue, electric current through the bearings may be the cause behind many mysterious bearing breakdowns, especially with large inductions. This phenomenon is generally caused by non-symmetry in the magnetic circuit, which induces a small voltage in the stator structure, or by a zero sequence current. If the potential between the stator structure and the shaft unit becomes high enough, a discharge will take place through the bearing.Small electric discharges between the rolling elements and the bearing raceway will eventually damage the bearing. 90002 The use of frequency converters will increase the probability of this type of bearing failure occurring. The switching technique of a modern frequency converter causes a zero-sequence current that, under certain circumstances, finds its way through the bearings. 90007 90002 The easiest way to cure this problem is to raise an obstacle for the current. The usual method is to use a bearing with an insulating coating on the outer ring.90007 90002 90003 Conclusions 90004 90005
Using of a frequency converter is not meaning problem-free. Lots of questions that must be paid attention during the design work. Will it be necessary, for example, to limit the available shaft power to prevent excessive heating? It may prove necessary to run at lower output power to avoid this issue. 90007 90002 Will the induction motor insulation resist effects from the inverter? Is filtering necessary? Modern, efficient inverters have detrimental impact on the insulation due to high switching frequency and short voltage-rise time.90007 90002 Which maximum cable length can be used without producing full voltage reflection? The voltage amplitude depends on both the cable length and the rise time. With very short rise times, full reflection will occur in cables 10 to 20 meters long. 90007 90002 Might it be necessary to use insulated bearings in order to prevent a zero-sequence current from finding its way to the bearings? 90007 90002 Only when we clear of all these questions, we will be able to make right decisions about the use of a frequency converter.90007.
90000 What is Frequency Converter? How it works? 90001 Variable frequency operation has been around, in the form of the AC generator, since the advent of the induction motor. Change the rotational speed of a generator and you change its output frequency. Before the advent of high speed transistors, this was one of the few options available to vary motor speed, however, frequency changes were limited because generator speed reduction lowered the output frequency but not the voltage. We will see why this is important a little later.In our industry, variable speed pumping applications were far more complex in the past than they are today. One of the simpler methods was to employ a multi-pole motor that was wound in such a way that allowed a switch (or switches) to vary the number of stator poles that were active at any given time. Rotational speed could be changed manually or by a sensor connected to the switches. Many variable flow pumping applications still employ this method. Examples include hot & chilled water circulators, pool pumps, and cooling tower fans & pumps.Some domestic booster pumps used fluid drive or variable belt drive systems (an automatic transmission of sorts) to vary pump speed based on feedback from a pressure diaphragm valve. And, several others were even more complex. 90002 Based upon the hoops we had to jump through in the past, it becomes pretty apparent why the advent of the modern frequency converter revolutionized (yet another pun) the variable speed pumping environment. All you have to do today is install a relatively simple electronic box (that often replaces more complex starting equipment) at the application site and, suddenly you can, either manually or automatically, change pump speed to your heart’s desire.90003 90002 So, lets take a look at the components of a frequency inverter and see how they actually function together to vary frequency and thus motor speed. I think you will be amazed at the simplicity of the process. All it took was the maturing of the solid state device we know as the transistor. 90003 90002 90007 Frequency converter Components 90008 90003 90002 90007 The Rectifier 90008 90013
Because it is difficult to change the frequency of an AC sine wave while in the AC mode, the first job of a frequency converter is to convert the wave to DC.As you will see a little later, it is relatively easy to manipulate DC in order to make it look like AC. The first component of all frequency converters is a device known as a rectifier or converter and it is shown to the left of the figure below. 90013
90003 90002 The rectifier circuit converts AC to DC and does so in much the same manner as those of a battery charger or arc welder. It uses a diode bridge to limit the travel of the AC sine wave to one direction only. The result is a fully rectified AC wave form that is interpreted by a DC circuit as a native DC wave form.Three phase frequency converters accept three separate AC input phases and convert them to a single DC output. Most three phase frequency converters can also accept single phase (230V or 460V) power but, since there are only two incoming legs, the frequency converters output (HP) must be derated because the DC current produced is reduced proportionally. On the other hand, true single phase frequency converters (those that control single phase motors) utilize a single phase input and produce a DC output that is proportional to the input.90003 90002 There are two reasons why three phase motors are more popular than their single phase counter parts when it comes to variable speed operation. First they offer a much wider power range. But, equally as important is their ability to begin rotation on their own. A single phase motor, on the other hand, often requires some outside intervention to begin rotation. In this case, we will limit our discussion to three phase motors used on three phase frequency converters. 90003 90002 90007 The DC Bus 90008 90013
The second component, known as the DC Bus (shown in the center of the illustration) is not seen and in all frequency converters because it does not contribute directly to variable frequency operation.But, it will always be there in high quality, general purpose frequency converters (those manufactured by dedicated frequency converter manufacturers). Without getting into a lot of detail, the DC Bus uses capacitors and an inductor to filter the AC “ripple” voltage from the converted DC before it enters the inverter section. It can also include filters which impede harmonic distortion that can feed back into the power source supplying the frequency converter. Older frequency converters and some pump specific frequency converters require separate line filters to accomplish this task.90003 90002 90007 The Inverter 90008 90013
To the right of the illustration is the “guts” of the frequency converter. The inverter uses three sets of high speed switching transistors to create DC “pulses” that emulate all three phases of the AC sine wave. These pulses not only dictate the voltage of the wave but also its frequency. The term inverter or inversion means “reversal” and simply refers to the up and down motion of the generated wave form. The modern frequency converter inverter uses a technique known as “Pulse Width Modulation” (PWM) to regulate voltage and frequency.We will cover this in more detail when we look at the output of the inverter. 90003 90002 Another term you have probably run across when reading frequency converter literature or advertisements is “IGBT”. IGBT refers to the “Insulated Gate, Bipolar Transistor” which is the switching (or pulsing) component of the inverter. The transistor (which replaced the vacuum tube) serves two functions in our electronic world. It can act as an amplifier and increase a signal as it does in a radio or stereo or, it can act as a switch and simply turn a signal on and off.The IGBT is simply a modern version that provides higher switching speeds (3000 – 16000 Hz) and reduced heat generation. The higher switching speed results in increased accuracy of AC wave emulation and reduced audible motor noise. A reduction in generated heat means smaller heat sinks and thus a smaller frequency converter footprint. 90003 90002 90007 Inverter Output 90008 90013
The illustration to the right shows the wave form generated by the inverter of a PWM frequency converter compared with that of a true AC sine wave.The inverter output consists of a series of rectangular pulses with a fixed height and adjustable width. In this particular case there are three sets of pulses – a wide set in the middle and a narrow set at the beginning and end of both the positive and negative portions of the AC cycle. The sum of the areas of the pulses equals the effective voltage of a true AC wave (we will discuss effective voltage in a few minutes). If you were to chop off the portions of the pulses above (or below) the true AC wave and use them to fill in the blank spaces under the curve, you would find that they match almost perfectly.It is in this manner that a frequency converter controls the voltage going to the motor. 90003 90002 The sum of the width of the pulses and the blank spaces between them determines the frequency of the wave (hence PWM or pulse width modulation) seen by the motor. If the pulse was continuous (i.e. no blank spaces), the frequency would still be correct but the voltage would be much greater than that of the true AC sine wave. Depending upon the desired voltage and frequency, the frequency converter will vary the height and width of the pulse and the width of the blank spaces in between.Although the internals that accomplish this are relatively complex, the result is elegantly simple! 90003 90002 Now, some of you are probably wondering how this “fake” AC (actually DC) can run an AC induction motor. After all, does not it take an alternating current to “induce” a current and its corresponding magnetic field in the motor’s rotor? Well, AC causes induction naturally because it is continuously changing direction. DC, on the other hand, does not because it is normally motionless once a circuit is activated.But, DC can induce a current if it is switched on and off. For those of you old enough to remember, automobile ignition systems (prior to the advent of the solid state ignition) used to have a set of points in the distributor. The purpose of the points was to “pulse” power from the battery into the coil (a transformer). This induced a charge in the coil which then increased the voltage to a level that would allow the spark plugs to fire. The wide DC pulses seen in the previous illustration are actually made up of hundreds of individual pulses and, it is this on and off motion of the inverter output that allows induction via DC to occur.90003 90002 90007 Effective Voltage 90008 90013
AC power is a rather complex quantity and it is no wonder that Edison almost won the battle to make DC the standard in the US. Fortunately, for us, all of its complexities have been explained and all we have to do is follow the rules those before us have laid out. 90003 90002 One of the attributes that makes AC complex is that it changes voltage continuously, going from zero to some maximum positive voltage, then back to zero, then to some maximum negative voltage, and then back to zero again.How is one to determine the actual voltage applied to a circuit? The illustration on the left is that of a 60 Hz, 120V sine wave. Notice, however, that its peak voltage is 170V. How can we possibly call this a 120V wave if its actual voltage is 170V? During one cycle it starts at 0V and rises to 170V then falls again to 0. It continues falling to -170 and then rises again to 0. It turns out that the area of the green rectangle, whose top border is at 120V, is equal to the sum of the areas under the positive and negative portions of the curve.Could 120V then be the average? Well, if you were to average all of the voltage values at each point across the cycle, the result would be approximately 108V so that must not be the answer. Why then is the value, as measured by a VOM, 120V? It has to do with something we call “effective voltage”. 90013
90013
If you were to measure the heat produced by a DC current flowing through a resistance, you would find that it is greater than that produced by an equivalent AC current. This is due to the fact that AC does not maintain a constant value throughout its cycle.If you did this in the laboratory, under controlled conditions, and found that a particular DC current generated a heat rise of 100 deg, its AC equivalent would produce a 70.7 deg rise or just 70.7% of the DC value. Therefore the effective value of AC is 70.7% of that of DC. It also turns out that the effective value of an AC voltage is equal to the square root of the sum of the squares of the voltage across the first half of the curve. If the peak voltage is 1 and you were to measure each of the individual voltages from 0 deg to 180 deg, the effective voltage would be 0.707 of the peak voltage. 0.707 times the peak voltage of 170 seen in the illustration equals 120V. This effective voltage is also known as the root mean square or RMS voltage. It follows that the peak voltage will always be 1.414 that of the effective voltage. 230V AC current has a peak voltage of 325V while 460 has a peak voltage of 650V. We will see the effects of peak voltage a little later. 90003 90002 Well, I have probably gone on about this longer than necessary but, I wanted you to gain an understanding of effective voltage so that you will understand the illustration below.In addition to varying frequency, a frequency converter must also vary voltage even though voltage has nothing to do with the speed at which an AC motor operates. 90013
90013
The illustration shows two 460V AC sine waves. The red one is a 60hz curve while the blue one is 50hz. Both have a peak voltage of 650V but, the 50hz is much broader. You can easily see that the area under the first half (0 – 10 ms) of the 50hz curve is greater than that of the first half (0 – 8.3 ms) of the 60hz curve.And, since the area under the curve is proportional to effective voltage, its effective voltage is higher. This increase in effective voltage becomes even more dramatic as frequency decreases. If a 460V motor were allowed to operate at these higher voltages, its life could be decreased substantially. Therefore, the frequency converter must constantly vary “peak” voltage, with respect to frequency, in order to maintain a constant effective voltage. The lower the operating frequency, the lower the peak voltage and vice versa.It is for this reason that 50hz motors, used in Europe and parts of Canada, are rated for 380V. See, I told you that AC can be a bit complex! 90003 90002 You should now have a pretty good understanding of the workings of a frequency converter and how it controls the speed of a motor. Most frequency converters offer the user the ability to set motor speed manually via a multi-position switch or keypad, or use sensors (pressure, flow, temperature, level etc) to automate the process. 90013 90003.90000 Frequency Converter – Power Frequency Changer 90001 90002 WHAT IS A FREQUENCY CONVERTER? 90003
90004 A frequency converter, also known as a power frequency changer, is a device that takes incoming power, normally 50 or 60 Hz and converts it to 400 Hz output power. Different types of power frequency converters exist, specifically, there are both rotary frequency converters and solid state frequency converters. Rotary frequency converters use electrical energy to drive a motor.Solid-state frequency converters take the incoming alternating current (AC) and convert it to direct current (DC). 90005
90006 90007 What is the purpose of a power frequency converter for commercial utility? 90008 90009
90004 Standard commercial utility power is alternating current (AC) power. AC refers to the number of cycles per second ( ‘hertz “or Hz) that the power fluctuates, positive and negative, around a neutral datum. Two standards exist in the world, 50 hertz and 60 hertz. 50 Hz is prevalent in Europe, Asia, and Africa, while 60 Hz is the standard in most of North America and some other countries (Brazil, Saudi Arabia, South Korea) around the world.90005
90004 There is no inherent advantage to one frequency over another frequency. But there can be significant disadvantages. Problems occur when the load being powered is sensitive to the input power frequency. For example, motors spin at a multiple of the power frequency. Thus, a 60 Hz motor will spin at 1800 or 3600 RPM. However, when 50 Hz power is applied, the RPM is 1500 or 3000 RPM. Machines tend to be speed-sensitive, so the power to run them must correspond to the design RPM intended.Thus, a typical piece of European machinery needs 50 Hz input, and if it runs in the United States, a 60-to-50 Hz converter is required to convert the available 60 Hz power to 50 Hz. The same applies vice versa to convert 50 Hz power to 60 Hz. While standard power ratings and capacities exist for frequency changers, our converters operate over a range of voltages from 100V to 600V. The most commonly specified voltages are 110V, 120V, 200V, 220V, 230V, 240V, 380V, 400V, and 480V. Because our standard and custom design capabilities can meet a range of power system needs, Georator is your supplier for frequency to voltage converters.90005 90006 WHY DOES A FREQUENCY CONVERTER COST SO MUCH? 90009
90004 90017 A lot of clients suffer “sticker shock” when looking to by a frequency converter. It makes little difference if the power frequency converter is a rotary unit (motor-generator set) or a solid state (electronic) unit. And, in fact, the cost spread among vendors is surprisingly small. 90005
90004 So what makes frequency converters so expensive? Well, it’s a law. Specifically, the laws of physics.90005
90004 Unlike voltage conversion, which only requires a rather passive transformer, a frequency converter must completely remake the power in order to change the frequency. In a rotary converter, incoming electrical energy is converted to mechanical power in the drive motor. That rotational power then feeds a generator, where the rotational energy is reconverted to electrical output. Lots of moving parts, lots of hardware, lots of costs. 90005
90004 In a similar manner, a solid state frequency converter converts incoming AC power into DC, by the use of a rectifier.The DC energy is then reconverted into AC power by the use of an inverter section. Again, lots of parts, lots of costs. 90005
90004 One positive side benefit of either type of frequency converter is that any desired voltage conversion occurs “for free” as part of the frequency conversion process. Unfortunately, this is often little consolation to our clients. 90005
90004 Sorry, it’s just the law. 90005
90006 DO I REALLY NEED A FREQUENCY CONVERTER? 90009
90004 When potential clients are faced with buying a frequency converter, ours or those of our competitors, they often find the cost to be a major impediment.Do they really need the frequency converter? Well, the answer lies in what type of load is being served. 90005
90004 90034 Applications involving motor loads often need a power frequency converter because the rotational characteristics, specifically revolutions per minute (RPM), are a direct function of the input frequency of the electricity. A 60 Hz motor will spin at some multiple of 60, e.g., 1800 RPM. Concurrently, a 50 Hz motor will spin at a multiple of 50, e.g. 1500 RPM. Thus, when dealing with a motor load, especially in a multi-motor machine, it may be quite necessary to use a frequency converter to ensure that the motors spin in accordance to the original rotational design.90005
90004 However, resistive loads, such a resistance heaters and some lights, do not care what the frequency of the incoming power is. So if the load is restive, no frequency conversion may be necessary. The only caveat is that the voltage must be in the right range. Even if only a major portion of the load is resistive, it may be more economical to split the load into parts, and only feed the frequency-dependent component with a converter. 90005
90004 It’s also wise to consider replacing motor (s) in the load to the proper frequency, as this may yield a less costly solution than using a frequency converter.90005
90004 Georator application engineers are available to discuss these issues with you; contact our team for assistance. While we value your business, we do not want to sell you something you do not need. 90005
.90000 Frequency Converter 90001 90002 Click to reload page with unique web address for bookmarking or sharing current settings 90003 90002 ✕ clear settings 90003 Sorry, a graphic could not be displayed here, because your browser does not support HTML5 Canvas. 90006 Related Tools 90007 90006 User Guide 90007
90002 This conversion tool will convert a frequency value into different measurement units and display conversion scale related to the converted value. 90003
90002 Frequency is used to measure physical actions that are cyclic in nature, that follow a pattern which repeats many times such as oscillations and rotational movement.90003
90002 Frequency is typically defined as the number of cycle completed in a unit period of time, where the SI unit for frequency which is the Hertz equals 1 cycle per second. 90003
90002 In rotational motion other units are used such as revolutions per minute (rpm), radians per second (rad / s) and degrees per minute (deg / min). 90003
90018 Frequency Applications 90019
90002 Frequency is measured in many applications which include: 90003
90022
90023 Sound Waves 90024
90023 Electromagnetism 90024
90023 Electricity 90024
90023 Light Waves 90024
90023 Resonance 90024
90023 Rotational Motion 90024
90035
90018 Conversion Factors 90019
90002 The following units of frequency converted into Hertz (SI units for frequency) are used by this frequency conversion tool: 90003
90022
90023 attohertz (aHz) – 1 x 10 90042 -18 90043 Hz 90024
90023 femtohertz (fHz) – 1 x 10 90042 -15 90043 Hz 90024
90023 picohertz (pHz) – 1 x 10 90042 -12 90043 Hz 90024
90023 nanohertz (nHz) – 0.000000001 Hz 90024
90023 microhertz (μHz) – 0.000001 Hz 90024
90023 millihertz (mHz) – 0.001 Hz 90024
90023 centihertz (cHz) – 0.01 Hz 90024
90023 decihertz (dHz) – 0.1 Hz 90024
90023 hertz (Hz) – 1 Hz 90024
90023 decahertz (daHz) – 10 Hz 90024
90023 hectohertz (hHz) – 100 Hz 90024
90023 kilohertz (kHz) – 1,000 Hz 90024
90023 megahertz (MHz) – 1,000,000 Hz 90024
90023 gigahertz (GHz) – 1,000,000,000 Hz 90024
90023 terahertz (THz) – 1 x 10 90042 +12 90043 Hz 90024
90023 petahertz (PHz) – 1 x 10 90042 +15 90043 Hz 90024
90023 exahertz (EHz) – 1 x 10 90042 +18 90043 Hz 90024
90023 revs / hour (rph) – 2.7 x 10 90042 -4 90043 Hz 90024
90023 revs / minute (rpm) – 0.016 Hz 90024
90023 revs / second (rps) – 1 Hz 90024
90023 radians / hour (rad / hr) – 4.420970641 … x 10 90042 -5 90043 Hz 90024
90023 radians / minute (rad / min) – 2.652582385 … x 10 90042 -3 90043 Hz 90024
90023 radians / second (rad / s) – 0.1591549431 … Hz 90024
90023 degrees / hours (deg / hr) – 7.716049382 x 10 90042 -7 90043 Hz 90024
90023 degrees / minute (deg / min) – 4.629 x 10 90042 -5 90043 Hz 90024
90023 degrees / second (deg / sec) – 2.7 x 10 90042 -3 90043 Hz 90024
90035
.90000 Frequency Converter Basics 90001 To realize high efficiency, great manageability and energy saving in industrial induction motor related applications, it is necessary to adopt controllable frequency converter systems. Frequency converter system nowadays is AC motor fed by a static frequency converter. The up-to-date frequency converter works great for AC motor applications and easy installation. One important issue, however, is caused by the non-sinusoidal output voltage. This factor has caused a lot of undesirable problems.Increased induction motor losses, noise and vibrations, detrimental impact on the induction insulation system, and bearing failure are examples of frequency converter related systems ‘issues. Increased induction losses mean a de-rating of the induction output power to prevent overheating. Measurement in the lab shows that temperature rises may be 40% higher with frequency converter compared with general power supplies. Continuous research and enhancement of frequency converters have solved many of these issues.Unfortunately, it seems that solving one problem has accented another. Reducing the induction and frequency converter losses tends to increase the detrimental impact on the insulation. The induction manufacturers are, of course, aware of this. New induction designs (inverter-resistant motors) are beginning to appear on the market. Better stator winding insulation and other structural improvements ensure induction motors that will be better adapted for frequency converter applications. 90002 90003 Introduction 90004 90005
One of the most serious problems to the induction motor has been the difficulty of adapting it to speed adjusting.The synchronous speed of an AC motor is determined by the following equation. 90005
90007 90008
n 90009 s 90010 = 120 * f / p 90005
90012
n 90009 s 90010 = synchronous speed 90005
f = power grid frequency 90005
p = pole number 90002 The only way to adjust the speed, for a given pole number is to change the frequency. 90007 90002 90003 The basic principle 90004 90005
In theory, the basic idea is simple, the process of transforming the stable power-line frequency into a variable frequency is basically done in two steps: 90005
90007 90025
90026
The AC power source is rectified into a DC voltage.90027
90026
The DC voltage is chopped up into an AC voltage of the desired frequency.
90027
90030
A frequency converter basically consists of three blocks: the rectifier, the DC-link, and the inverter. 90005
90002 90003 Different types of frequency converters 90004 90005
90036 PWM Voltage Source Inverter (VSI) 90037 90005
The PWM (Pulse Width Modulation) is widely applied in the frequency converter industry. They are available from a several hundred watts up to megawatts.90005
90007 90002 A PWM converter does not have to match the load exactly, it need only make sure that the load does not consume current higher than the PWM converter is rated for. It is quite possible to run a 20 kW induction with a 100 kW PWM converter. This is a great benefit that makes operation easier for the application. 90007 90002 Nowadays, the PWM frequency converter is using Insulated Gate Bipolar Translator (IGBT). Modern PWM frequency converters perform very well, and are not far behind designs using a sinusoidal power supply – at least not in the power range up to 100 kW or so.90007 90002 90036 Current Source Inverter (CSI) 90037 90005
The current source inverter is a rough and rather simple design compared with the PWM. It uses simple thyristors or SCRs in the power circuits, which makes it much cheaper. It has also benefit of being very reliable. The design makes it short-circuit proof because of the large inductors in the DC link. It is bulkier than the PWM. 90005
90007 90002 Earlier, the current source inverter was the best choice for big loads. A disadvantage with the current source inverter is the need of matching to the load.The frequency converter has to be designed for the induction motor used. In fact, the induction itself is a part of the inverted circuit. 90007 90002 The current source inverter supplies the induction motor with a square-shaped current. At low speeds, the induction produces a cogging torque. This type of frequency converter will generate more noise on the supply source compared to the PWM converter. Filtering is necessary. 90007 90002 Heavy voltage transients in the output voltage are an additional disadvantage of the current source inverter.The transients can reach nearly twice the nominal voltage in the worst cases. There is also a risk that the winding insulation will be worn out prematurely, if this frequency converter is used. This effect is most serious when the load does not match the frequency converter properly. This can happen when running at part load. This kind of frequency converter is losing its popularity more and more. 90007 90002 90036 Flux Vector Control (FVC) 90037 90005
A flux vector control is a more sophisticated type of frequency converter that is used in applications having extreme control demands.In paper mills for example, it is necessary to control speed and stretching forces very precisely. 90007 90002 A FVC frequency converter always has some kind of feedback loop. This kind of frequency converter is generally of minor interest in pump applications. It is expensive, and its benefits can not be taken advantage of. 90007 90002 90003 Effect on the motor 90004 90005
An induction works best when supplied with a pure sinusoidal-voltage source. This is mostly the case when connected to a robust utility power source.90007 90002 When an induction is connected to a frequency converter, it will be supplied with a non-sinusoidal voltage-more like a chopped square voltage. If we supply a 3-phase induction with a symmetrical 3-phase square voltage, all the harmonics that are multiples of three, as well as the even numbers, will be eliminated because of symmetry. But, still left are the numbers 5; 7 and 11; 13 and 17; 19 and 23; 25 and so on. For each pair of harmonics, the lower number is reverse rotating and the higher number is forward rotating.90007 90002 The speed of the induction motor is determined by the fundamental number, or number 1, because of its strong dominance. Now what happens to the harmonics? 90007 90002 From the point of view of harmonics, the induction seems to have the rotor blocked, which means that the slip is approximately 1 for the harmonics. These provide no useful work. The result is mostly rotor losses and extra heating. In our application in particular, this is a serious outcome. With modern technology, however, it is possible to eliminate much of the harmonic content in the induction current, thereby reducing the extra losses.90007 90002 90003 Frequency converter before 90004 90005
The earliest frequency converters often used a simple square voltage to supply the induction motor. They caused heating-up problems and the inductions ran with a typical noise caused by torque ripple. Much better performance was achieved by simply eliminating the fifth and the seventh. That was done through some extra switching of the voltage signal. 90007 90002 90003 Frequency converter today 90004 90005
Nowadays, the technique is more sophisticated and most of the disadvantages are history.Development of fast power semiconductors and the micro-processor has made it possible to tailor the switching pattern in such a way that most of the harmful harmonics are eliminated. 90007 90002 Switching frequencies up to 20 kHz are available for frequency converters in the medium-power range (up to some tens of kW). The induction current with this type of frequency converter will be nearly sinus shaped. 90007 90002 At a high switching frequency, induction losses are kept low, but losses in the frequency converter will increase.The total losses will become higher at excessively high switching frequencies. 90007 90002 90003 Some motor basic theory 90004 90005
The torque production in an induction motor may be expressed as 90005
90007 90008
T = V * τ * B [Nm] 90005
90012
V = Active rotor volume [m 90098 3 90099] 90005
τ = Current per meter stator bore circumference 90005
B = Flux density in the air gap 90005
90008
B = proportional to (E / ω) = E / (2 * π * f) 90005
90012
ω = angular frequency of the stator voltage 90005
E = induced stator voltage 90002 To obtain the best performance at various speeds, it becomes necessary to maintain an appropriate magnetization level for the induction for each speed.90007 90002 A range of various torque characteristics is shown as following figure. For the constant torque load, the V / F ratio must be constant. For the square torque load, a constant V / F ratio will result in excessively high magnetization at lower speed. This will generate unnecessarily high iron losses and resistance losses (I 90098 2 90099 R). 90005
90007 90002 It is better to use a square V / F ratio. The iron losses and I 90098 2 90099 R losses are thus reduced to a level more acceptable for the actual load torque.90007 90002 If we look at the Figure, we find that the voltage has reached its maximum and can not be increased above the 50Hz base frequency. The range above the base frequency is called the field weakening range. A consequence of this is that it is no longer possible to maintain the necessary torque without increasing the current. This will result in heating-up problems of the same kind as with normal under voltages run from a sinusoidal power grid. The frequency converter’s rated current will likely be exceeded.90007 90002 90003 Running in the field-weakening range 90004 90005
Sometimes, there is a temptation to run the pump at frequencies above the commercial power grid frequency in order to reach a duty point that would otherwise be impossible. Doing so calls for extra awareness. The shaft power for a pump will increase with the cube of speed. An over speed of 10% will require 33% more output power. Roughly speaking, we can expect that the temperature rise will increase by about 75%. 90005
90007 90002 There is, nonetheless, a limit to what we can squeeze out of the induction at over speed.The maximum torque of the induction will drop as a function of 1 / F in the field-weakening range. 90007 90002 It is obvious that the induction will drop out if the frequency converter can not support it with a voltage that corresponds to that needed by the torque. 90007 90002 90003 Derating 90004 90005
In many cases, the induction is run at maximum capacity from a sinusoidal power grid and any extra heating can not be tolerated. If such an induction is powered from a frequency converter of some kind, it most probably must be run at lower output power in order to avoid overheating.90007 90002 It is not unusual that a frequency converter for big pumps above 300 kW will add extra induction losses of 25-30%. In the upper power range, only a few of the frequency converters have a high switching frequency: 500 to тисячі Hz is usual for the former generation of frequency converters. 90007 90002 To compensate for the extra losses, it is necessary to reduce the output power. We recommends a general derating of 10-15% for large pumps. 90007 90002 Since the frequency converter pollutes the supply grid with harmonics, an input filter sometimes is prescribed by the power company.This filter will decrease the available voltage by typically 5-10%. The induction will consequently run at 90-95% of nominal voltage. The consequence is additional heating. Derating might be necessary. 90007 90002 90003 Example 90004 90005
Assume that the output power for the actual pump motor is 300 kW at 50 Hz and the temperature rise is 80 ° C using a sinusoidal power grid. Extra losses of 30% will result in an induction that is 30% warmer. A conservative assumption is that the temperature rise varies with the square of shaft power.90007 90002 In order not to exceed 80 ° C, we have to reduce the shaft power to 90005
90007 90008
P 90009 reduced 90010 = √ (1 / 1.3) * 300 = 263kW 90005
90012
The reduction can be achieved either by reducing impeller diameter or by speeding down. 90002 90003 Frequency converter Losses 90004 90005
When the total efficiency of a frequency converter system is determined, the internal losses of the frequency converters must be included. These frequency converter losses are not constant and not easy to determine.They consist of a constant part and a load dependent part. 90007 90002 90036 Constant losses: 90037 90005
Cooling losses (cooling fan) -losses in the electronic circuits and so on. 90007 90002 90036 Load dependent losses: 90037 90005
Switching losses and lead losses in the power semiconductors. 90007 90002 Following figure shows the frequency converter efficiency as function of the frequency at a cubic load for units rated at 45, 90, and 260 kW. The curves are representative for frequency converters in the power range of 50-300 kW; with the switching frequency equaling about 3 kHz and with an IGBT of the second generation.90005
90007 90002 90003 Effects on motor insulation 90004 90005
The output voltages from modern frequency converters have a very short voltage rise time. 90005
90007 90008
dU / dT = 5000V / μs is a common value. 90005
90012
Such steep voltage slopes will cause undue stress in the insulation materials of the induction winding. With short rise times, voltage in the stator winding is not uniformly distributed. With a sinusoidal power supply, the turn-turn voltage in an induction winding is normally equally distributed.With a frequency converter on the other hand, up to 80% of the voltage will drop across the first and the second turn. Since the insulation between the wires constitutes a weak point, this may prove to be hazardous for the induction. A short rise time also causes voltage reflection in the induction cable. In the worst case, this phenomena will double the voltage across the induction terminals. An induction fed from a 690-volt frequency converter might be exposed to up to 1 900 volts between phases.90002 The voltage amplitude depends on the length of the induction cable and the rise time. With very short rise times, full reflection occurs in a cable 10 to 20 meters in length. 90007 90002 To ensure function and ample motor life time, it is absolutely necessary that a winding be adapted for use with a frequency converter. Inductions for voltages above 500 volts must have some form of reinforced insulation. The stator winding must be impregnated with a resin that ensures an insulation free of bubbles or cavities.Glow discharges often start around cavities. This phenomena will eventually destroy the insulation. 90007 90002 There are ways to protect a motor. Over and above a reinforced insulation system, it might be necessary to insert a filter between the frequency converter and the induction. Such filters are available from most well-known frequency converter suppliers. 90007 90002 A filter will typically slow down the voltage rise time from 90005
90007 90008
dU / dT = 5000V / μs to 500-600V / μs 90005
90012
90003 Bearing failure 90004 90005
Breakdown of rotating machinery can often be related to bearing failure.In addition to excessive heating, insufficient lubrication or metal fatigue, electric current through the bearings may be the cause behind many mysterious bearing breakdowns, especially with large inductions. This phenomenon is generally caused by non-symmetry in the magnetic circuit, which induces a small voltage in the stator structure, or by a zero sequence current. If the potential between the stator structure and the shaft unit becomes high enough, a discharge will take place through the bearing.Small electric discharges between the rolling elements and the bearing raceway will eventually damage the bearing. 90002 The use of frequency converters will increase the probability of this type of bearing failure occurring. The switching technique of a modern frequency converter causes a zero-sequence current that, under certain circumstances, finds its way through the bearings. 90007 90002 The easiest way to cure this problem is to raise an obstacle for the current. The usual method is to use a bearing with an insulating coating on the outer ring.90007 90002 90003 Conclusions 90004 90005
Using of a frequency converter is not meaning problem-free. Lots of questions that must be paid attention during the design work. Will it be necessary, for example, to limit the available shaft power to prevent excessive heating? It may prove necessary to run at lower output power to avoid this issue. 90007 90002 Will the induction motor insulation resist effects from the inverter? Is filtering necessary? Modern, efficient inverters have detrimental impact on the insulation due to high switching frequency and short voltage-rise time.90007 90002 Which maximum cable length can be used without producing full voltage reflection? The voltage amplitude depends on both the cable length and the rise time. With very short rise times, full reflection will occur in cables 10 to 20 meters long. 90007 90002 Might it be necessary to use insulated bearings in order to prevent a zero-sequence current from finding its way to the bearings? 90007 90002 Only when we clear of all these questions, we will be able to make right decisions about the use of a frequency converter.90007.Больше новостей
