
Типовые устройства (средства) для компенсации реактивной мощности
Типовые устройства (средства) для компенсации реактивной мощности в сетях переменного тока
Эволюция устройств компенсации реактивной мощности. Традиционные устройства компенсации реактивной мощности. Прогрессивные устройства коррекции коэффициента мощности для сетей низкого и среднего напряжения.
Перетоки реактивной мощности, негативно влияющие на генерацию, транспорт и качество поставляемой электроэнергии, официально признаны проблемой на рубеже XIX – XX веков, а первые практические шаги для компенсации реактивной мощности были сделаны еще в 1914 году путем включения в сеть последовательно с нагрузкой шунтирующих конденсаторов и долгое время статические батареи конденсаторов оставались если и не единственным, то наиболее популярным средством коррекции коэффициента мощности в сетях с индуктивными нагрузками. Со второй половины прошлого века параллельно со статическими релейными (контакторными) установками компенсации реактивной мощности с механическим включением и отключением ступеней батарей шунтирующих силовых конденсаторов начали использовать и другие средства коррекции мощности.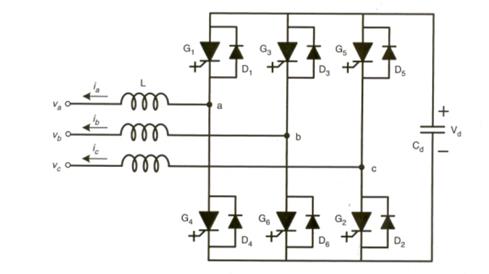
На рубеже нового тысячелетия претерпела изменение сама концепция электрической сети, которая сегодня переведена из категории пассивных устройств транспорта электроэнергии в активную систему, участвующую и влияющую на процесс генерации, передачи и потребления электрической энергии, что определило необходимость разработки технологий, средств и алгоритмов управления сетью, ее элементами, узлами и нагрузками. Так, по сути, сформировалась концепция гибких управляемых систем электропередачи переменного тока FACTS (Flexible Alternative Current Transmission System), формализованная американским Институтом электроэнергетики EPRI, в которые для контроля и управления генерацией, транспортом и потреблением электроэнергии интегрировались традиционные и новые средства коррекции коэффициента мощности и повышения качества электроэнергии – самокоммутируемые преобразователи напряжения, статические тиристорные компенсаторы (устройства компенсации реактивной мощности с тиристорным переключением TCSC (Thyristor Controlled Series Capacitor), реакторы с тиристорным управлением TCR (Thyristor Controlled Reactor), конденсаторные батареи с тиристорным переключением TSC (Thyristor Switched Capacitor), системы статической компенсации реактивной мощности SVC (Static VAR Compensator) – комбинации компонентов TCR и TSC), синхронные статические компенсаторы STATCOM (Static Synchronous Compensator), управляемые устройства (фазоповоротные и продольной емкостной компенсации, регуляторы потока мощности UPFC (Unified Power Flow Controllers), динамические восстановители напряжения DVR (Dynamic Voltage Restorers), интерлайн-регуляторы потока (IPFC), сверхпроводящие электромагнитные запоминающие устройства (SMES), асинхронизированные машины, электромашинновентильные комплексы и т.
Традиционные устройства компенсации реактивной мощности.
К традиционным устройствам компенсации реактивной мощности сегодня можно отнести:
- механически (вручную) переключаемые типовые релейные (контакторные) установки типа КРМ, УКРМ с фильтрами высших гармоник и без, в основном ориентированные на компенсацию реактивной мощности по централизованной, групповой, индивидуальной или комбинированной схемах на участках сетей и в сетях низкого (или среднего напряжения) с линейными нагрузками.
Довольно ограниченное использование (по типу нагрузки и уровню напряжения) релейных установок с механическим включением/отключением ступеней батарей конденсаторов обусловлено продолжительностью включения/отключения блока (батареи) силовых конденсаторов
даже с помощью вакуумных контакторов, что при быстрой динамике потребности нагрузки в реактивной мощности создает существенные риски перенапряжений или провалов напряжения со всеми вытекающими из этого негативными последствиями.
Более продвинутые, но и значительно более дорогие версии релейных установок компенсации реактивной мощности оборудуются импульсно-модуляционными преобразователями (ИМП) и индуктивностью для компенсации мгновенной реактивной мощности.
Релейные (контакторные) установки для коррекции коэффициента мощности с импульсно-модуляционным преобразователем и емкостным (а) и индуктивным (б) накопителями энергии.
Диаграммы напряжений и токов релейной установки коррекции коэффициента мощности компенсатора с ИМП и нагрузкой сложного характера, где:
а) напряжения и токи трёх фаз распределительной сети;
б) напряжение и токи фазы А: линейной нагрузки IAлн, нелинейной нагрузки IAнн и компенсатора IAк.
Прогрессивные устройства коррекции коэффициента мощности для сетей низкого и среднего напряжения.
Базовую линейку устройств коррекции коэффициента мощности для сетей низкого и среднего напряжения формируют:
- установки компенсации реактивной мощности типа TSC с применением управляемых вентилей (тиристоров)
- управляемые тиристорными переключателями, со срабатыванием (переключением между ступенями) от 1/2 до 2 циклов колебаний тока/напряжения (от 0,02 с).
 Тиристорные установки компенсации реактивной мощности обеспечивают переключение конденсаторных
батарей в момент равенства напряжений на конденсаторах и в сети во время, достаточное для коммутации с нелинейной нагрузкой, практически не генерировали высших гармоник и впервые были использованы в 50-х годах прошлого века.
Тиристорные установки компенсации реактивной мощности обеспечивают переключение конденсаторных
батарей в момент равенства напряжений на конденсаторах и в сети во время, достаточное для коммутации с нелинейной нагрузкой, практически не генерировали высших гармоник и впервые были использованы в 50-х годах прошлого века.
Однако установки компенсации реактивной мощности типа TSC так и оставались дискретными по генерации реактивной мощности из-за ступенчатого переключения батарей, оперативность переключения которых обеспечивалась отдельным дорогим тиристором на каждой ступени. Некоторого снижения материалоемкости и цены установок TSC удалось добиться использованием тиристорно-диодных схем, но это привело к увеличению задержки включения/отключения ступеней, а значит и повышению рисков перенапряжения и провалов напряжения в сети.
Бинарные тиристорно-диодные переключатели (сверху) и диаграммы токов бинарной тиристорно-диодной установки(снизу), где:
а – d – токи по В1 – В4; е – результирующая кривая тока установки.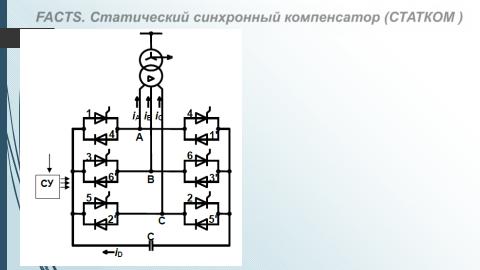
Справка: Установки компенсации реактивной мощности типа TSC с применением управляемых вентилей (тиристоров) на тиристорно-диодных схемах по факту – компенсирующие устройства прямой компенсации, в которых ступенчатое регулирование осуществляется с помощью включения и отключения батарей конденсаторов (и фильтров высших гармоник) в зависимости от динамики потребности в реактивной мощности энергопотребляющего устройства (нагрузки). Здесь нивелирование переходных процессов при включении/отключении, вызывающих колебания напряжения, достигается включением конденсаторных батарей тиристорными ключами в момент равенства напряжения в сети и на конденсаторах и по величине, и по полярности.
Устройства TSC с применением управляемых вентилей (тиристоров) прямой компенсации: а – схема; б – принцип работы, где 1-5 – ступени компенсации.
- управляемые тиристорами реакторы (TCR) и комбинированные установки компенсации реактивной мощности TSC-TCR с применением управляемых вентилей (тиристоров) на тиристорно-диодных схемах для управления переключением ступеней батарей статических
конденсаторов и реакторов.
 Это устройства компенсации реактивной мощности с динамическим (плавным) регулированием индуктивного элемента (реактора) и нерегулируемой (TCR) или регулируемой (TSC-TCR) части – блока конденсаторных батарей (или фильтров высших
гармоник). Индуктивность (реактор) в топологии устройства используется для демпфирования излишков генерируемой конденсаторами реактивной мощности, попадающих в сеть при переключении ступеней конденсаторных батарей. Регулируемые с применением управляемых
вентилей конденсаторные батареи (TSC-TCR) в определенной степени решают проблему дискретности по генерации реактивной мощности
Это устройства компенсации реактивной мощности с динамическим (плавным) регулированием индуктивного элемента (реактора) и нерегулируемой (TCR) или регулируемой (TSC-TCR) части – блока конденсаторных батарей (или фильтров высших
гармоник). Индуктивность (реактор) в топологии устройства используется для демпфирования излишков генерируемой конденсаторами реактивной мощности, попадающих в сеть при переключении ступеней конденсаторных батарей. Регулируемые с применением управляемых
вентилей конденсаторные батареи (TSC-TCR) в определенной степени решают проблему дискретности по генерации реактивной мощности
Справка: По факту управляемые тиристорами реакторы (TCR) и комбинированные установки TSC-TCR – статические компенсирующие устройства косвенной компенсации с применением управляемых вентилей (тиристоров), где нивелирование перепадов сетевого напряжения достигается за счет потребления генерируемой конденсаторами реактивной мощности управляемым реактором тогда, когда она не востребована нелинейной нагрузкой (и наоборот), причем регулирование и быстродействие устройства должно обеспечивать баланс наброса и сброса реактивной мощности в соответствии с потребностью нагрузки.
Рис. Компенсация реактивной мощности устройством косвенной компенсации TSC-TCR, где: а – схема; б – принцип действия устройства косвенной компенсации реактивной мощности.
Регулирование тока в реакторе, как правило, осуществляется посредством встречно-параллельно включенных тиристоров (время задержки 0.01 с), но ряд зарубежных компаний поставляет устройства с управляемым насыщающимся реактором (время задержки 0.06 с).
- установки синхронной компенсации реактивной мощности – синхронные двигатели разных типов и специальной конструкции, которые при работе на холостом ходу и в режиме перевозбуждения обмотки генерируют реактивную мощность. Для устройств синхронной компенсации характерно меньшее быстродействие в сравнении со статическими устройствами компенсации, отсутствие возможности управления по фазам, а также интеграции с FACTS.
Сравнение возможностей быстродействующих синхронных компенсаторов и статических устройств компенсации реактивной мощности с применением управляемых вентилей.
| Параметры сравнения | Специальный быстродействующий синхронный компенсатор | Статические тиристорные компенсирующие устройства | |
|---|---|---|---|
| прямой компенсации | косвенной компенсации | ||
| Скорость регулирования, с | Более 0,06 | Менее 0,02 | Менее 0,01 |
| Регулирование | Плавное | Ступенчатое | Плавное |
| Строительная часть | Массивные фундаменты | Фундаменты не требуются, большая гибкость монтажа | |
| Обслуживание | Смазка, охлаждение и т. д. | Обслуживания практически не требуется | |
Отношение Qуст к Qmax, отн. ед. ед. |
0,5–0,7, имеется возможность перегрузки до 2-х кратной | 1,0; перегрузка не допускается | 2,0; регулируемая индуктивная часть 1,0; емкостная нерегулируемая часть 1,0 |
| Работа на несимметричную нагрузку | Показное управление практически невозможно | Осуществляется пофазное управление практически без дополнительных затрат | |
| Потери от номинальной мощности, % | 2,5 – 4,0 | 0,5 – 1,0 | 1,0 – 2,0 |
| Искажение питающего напряжения | Нет | Нет | Управляемый тиристорами реактор является источником высших гармоник |
НЕОБХОДИМА КОНСУЛЬТАЦИЯ?
Синхронный компенсатор реактивной мощности, принцип действия, режимы работы
Синхронный компенсатор – синхронный двигатель не выполняющий механической работы. Его назначение — компенсация реактивной мощности. Если нагрузить его механической работой, он не сможет компенсировать реактивную составляющую в нужном диапазоне.
Его назначение — компенсация реактивной мощности. Если нагрузить его механической работой, он не сможет компенсировать реактивную составляющую в нужном диапазоне.
У него два режима работы:
- Перевозбужденный;
- Недовозбужденный;
Не будем углубляться в теорию работы синхронных машин, а рассмотрим отдельно каждый из режимов работы синхронного компенсатора.
Перевозбужденный режим. Так как компенсатор работает на холостом ходу, то согласно теории ток идеального холостого хода должен быть равен нулю, хотя на самом деле это не так. Выполняется равенство
. Если увеличить ток возбуждения (Iв) больше нуля Iв ≠ 0, то в двигателе образуется ЭДС и соответственно — машина выходит из электрического равновесия и возникает ток , который будет отставать от ∆ ,, на 900. Соответственно в сеть будет отдаваться реактивная составляющая. На рисунке а) приведена векторная диаграмма для данного случая.Рис. а) векторная диаграмма работы в перевозбужденном режимеНедовозбужденный режим. Если уменьшить Iв, в двигателе образуется ЭДС, соответственно — следствием , который будет отставать от ∆на 900, но будет опережать ,на 900. Соответственно с сети будет забираться реактивная составляющая. На рисунке б) приведена векторная диаграмма для данного случая.
Если уменьшить Iв, в двигателе образуется ЭДС, соответственно — следствием , который будет отставать от ∆на 900, но будет опережать ,на 900. Соответственно с сети будет забираться реактивная составляющая. На рисунке б) приведена векторная диаграмма для данного случая.
Можно сделать вывод, что синхронный компенсатор работает в двух режимах: компенсации и потребления реактивной составляющей. Это значит что он может не только отдавать но и потреблять, что позволяет поддерживать баланс мощности в цепи. Он снабжается автоматической системой управления возбуждением и в автоматическом режиме регулирует cosφ цепи. Также обладает большой инерционностью, что не позволяет ему быстро реагировать на изменение параметров цепи. При установке его в сеть с резко-переменной нагрузкой нужно максимально оптимизировать настройки регуляторов САУ, чтоб машина не пошла в разнос, так как это чревато аварийными отключением подстанции из-за бросков тока в сеть. Строятся на мощность до Sн = 100 000 кВА. Имеют явнополюсную конструкцию с 2р= 6 или 8 — тихоходные. Компенсаторы большой мощности делаются с водородным охлаждением.
Строятся на мощность до Sн = 100 000 кВА. Имеют явнополюсную конструкцию с 2р= 6 или 8 — тихоходные. Компенсаторы большой мощности делаются с водородным охлаждением.
Для асинхронного пуска снабжаются пусковыми обмотками в полюсных наконечниках или делают их с массивными полюсами. Пускаться они могут как прямым пуском, так и с помощью реакторов. Иногда используют гонный асинхронный двигатель для разгона машины до подсинхронной скорости. Наиболее часто имеют напряжение питания статора 6 кВ, 10 кВ и садятся на соответствующие линии ГПП.
Для возбуждения синхронного компенсатора чаще всего используют тиристорный преобразователь. Он прост в управлении, обладает малой инерционностью, дешев, по сравнению с другими устройствами, не требует постоянного обслуживания и быстро ремонтируем. Современные возбудители оборудованы микропроцессорной системой управления, которые могут в автоматическом режиме вычислять реактивную мощность и регулировать возбуждение машины, тем самым поддерживая баланс мощности.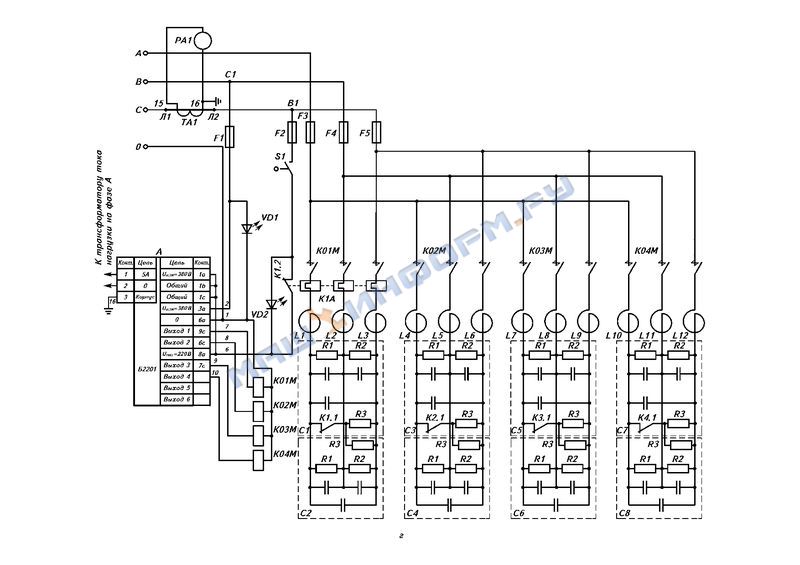 Ниже приведена функциональная схема системы автоматического регулирования (САУ):
Ниже приведена функциональная схема системы автоматического регулирования (САУ):
Также ранее применялись, а кое-где и до сих пор используются, электромашинное возбуждение. Как правило, работает с очень малой чувствительностью и очень большой инерционностью по отношению к цепи. Дорог в обслуживании и эксплуатации. При выходе из строя долго находится в ремонте. Ниже показана самая примитивная схема электромашинного возбудителя:
Вывод: синхронный компенсатор является обратимым устройством. Он дорог, занимает много места, а также вызывает шум и иногда вибрации. Эксплуатация его не дешевая, а в случае выхода из строя вращающихся элементов требует длительного ремонта. В сравнении с современными средствами компенсации реактивной мощности является устаревшим.
Новые решения по управляемым компенсирующим устройствам | Автоматическое регулирование мощности конденсаторных установок | Архивы
Страница 18 из 20
Увеличение активных нагрузок на промышленных предприятиях сопровождается соответствующим ростом потребления реактивной мощности. В связи с этим проблема компенсации и наиболее эффективного распределения реактивной мощности приобретает важное значение. Особое место здесь занимают установки, позволяющие практически безынерционно регулировать генерируемую реактивную мощность. Имеется в виду применение реакторов с подмагничиванием и вентилей с искусственной коммутацией, устройств с параллельным включением емкости и регулируемой индуктивности. Достоинствами таких компенсаторов являются отсутствие вращающихся частей и возможность плавного и практически безынерционного регулирования выдаваемой реактивной мощности.
В связи с этим проблема компенсации и наиболее эффективного распределения реактивной мощности приобретает важное значение. Особое место здесь занимают установки, позволяющие практически безынерционно регулировать генерируемую реактивную мощность. Имеется в виду применение реакторов с подмагничиванием и вентилей с искусственной коммутацией, устройств с параллельным включением емкости и регулируемой индуктивности. Достоинствами таких компенсаторов являются отсутствие вращающихся частей и возможность плавного и практически безынерционного регулирования выдаваемой реактивной мощности.
Рис. 45. Принципиальная схема статического компенсатора реактивной мощности, состоящего из управляемого реактора и форсируемой конденсаторной установки.
На рис. 45 приведено управляемое ферромагнитное устройство, представляющее собой статический компенсатор реактивной мощности, состоящий из управляемого реактора с параллельно включенной форсируемой конденсаторной установкой. Управляемый реактор представляет собой электромагнитный аппарат, индуктивное сопротивление которого плавно регулируется путем подмагничивания ферромагнитного сердечника постоянным током аналогично магнитному усилителю. В одну из обмоток реактора подключается форсируемая конденсаторная установка, служащая одновременно для устранения высших гармоник.
В одну из обмоток реактора подключается форсируемая конденсаторная установка, служащая одновременно для устранения высших гармоник.
Использование искусственной коммутации в схемах статических компенсирующих устройств, основанной на применении электронной техники, открывает новые возможности быстродействующего регулирования реактивной мощности и достижения высоких динамических показателей устройств компенсации реактивной мощности в энергетических системах.
В настоящее время становится актуальным определение областей наиболее целесообразного применения различных систем, регулируемых источников реактивной мощности (ИРМ) и их технико-экономическое сопоставление с синхронными компенсаторами и регулируемыми конденсаторными установками.
Создание таких быстрорегулируемых ИРМ позволит иметь установки, дающие возможность безынерционно изменять различные реактивные параметры электрических систем. Установки ИРМ могут явиться мощным средством обеспечения стабильного напряжения в сетях, питающих резкопеременные нагрузки на металлургических заводах с прокатными станами, наличие которых недопустимо снижает качество напряжения.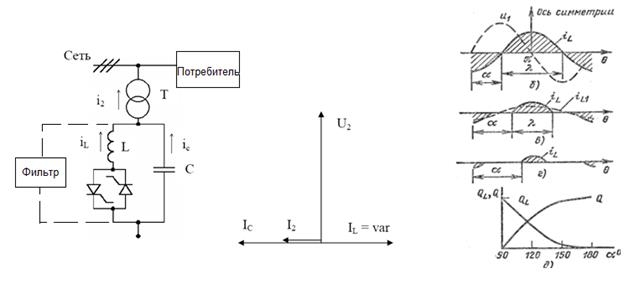
Статическое устройство ИРМ состоит из конденсаторной установки и специального регулирующего звена из индуктивности с полупроводниковыми вентилями. Суммарная реактивная мощность такой установки Qk меняется за счет переменной слагающей реактивной мощности индуктивностей которая вычитается из неизменной составляющей реактивной мощности конденсаторной установки Qc при неизменном линейном напряжении сети Uc:
Qк =Qc — QL.
Мощности конденсаторной установки и индуктивностей подбираются в каждом конкретном случае. При этом максимальная мощность, равная мощности конденсаторной установки, выдается в сеть при запертых вентилях. Мощность, потребляемая схемой, максимальна при отключенной конденсаторной установке и равна мощности реакторов (индуктивностей), когда вентили полностью открыты.
Рис. 46. Принципиальная схема управляемого статического источника реактивной мощности (ИРМ) с искусственной коммутацией вентилей.
На рис. 46 приведена принципиальная схема управляемого статического ИРМ, каждая фаза которого состоит из индуктивности и двух управляемых вентилей, включенных встречно-параллельно. Переход схемы из одного режима в другой осуществляется изменением величины напряжения управления, подаваемого автоматическим регулятором АР на вход электронной схемы управления вентилями.
Переход схемы из одного режима в другой осуществляется изменением величины напряжения управления, подаваемого автоматическим регулятором АР на вход электронной схемы управления вентилями.
Регулирование реактивной мощности при резкопеременных нагрузках с помощью ИРМ производится гораздо быстрее, чем синхронным компенсатором, поскольку как система возбуждения, так и сам силовой элемент оказываются практически безынерционными. При этом под воздействием ИРМ отклонения напряжения на шинах, с которых осуществляется питание этих нагрузок, снижается примерно до 2—2,5 % в то время как эти отклонения при отсутствии ИРМ могут составлять 15— 17%. Положительное влияние ИРМ сказывается также и на напряжении в других точках системы электроснабжения предприятия, доводя отклонения в этих точках до 1—2%.
Рис. 47. Схема электроснабжения металлургического завода с использованием статических регулируемых источников реактивной мощности (ИРМ).
На рис. 47 приведена схема электроснабжения металлургического завода, в состав которой входят конверторный цех с установкой непрерывной разливки стали, прокатные станы и др. Питание этих нагрузок осуществляется от двух трансформаторов мощностью по 100 MB-А с расщепленными обмотками напряжением 220/10/10 кВ. Распределительное устройство 10 кВ имеет четыре секции, на каждой из которых предусматривается компенсирующее устройство, дополняющее реактивную мощность, получаемую от крупных синхронных двигателей кислородной станции, и др.
Питание этих нагрузок осуществляется от двух трансформаторов мощностью по 100 MB-А с расщепленными обмотками напряжением 220/10/10 кВ. Распределительное устройство 10 кВ имеет четыре секции, на каждой из которых предусматривается компенсирующее устройство, дополняющее реактивную мощность, получаемую от крупных синхронных двигателей кислородной станции, и др.
Для получения наиболее эффективного результата от генерирования реактивной мощности и регулирования напряжения в сети 10 кВ, имеющей частые и большие колебания, применены новые автоматические регулируемые ИРМ, состоящие из нерегулируемой конденсаторной установки и регулирующего звена из индуктивности (реактора) с управляемыми полупроводниковыми вентилями.
Схемы с ИРМ могут быть использованы и для пофазного регулирования напряжения сети. Поскольку схема ИРМ фактически составлена из трех независимых фаз то при несимметрии фазных напряжений сети это устройство может быть использовано для выравнивания несимметрий путем пофазного автоматического регулирования реактивной мощности.
Имеются и другие схемы с вентилями и индуктивностями, позволяющими регулировать реактивную мощность и напряжение сети. Тиристорные компенсаторы реактивной мощности типа ТК-125-ЗвОУЗ предназначены для компенсации реактивной мощности с автоматическим плавным поддержанием коэффициента мощности или напряжения в сетях переменного тока напряжением до 0,4 кВ частотой 50 Гц в условиях умеренного климата. Тиристорные компенсаторы применяются на цеховых подстанциях и в промышленных сетях с резко- переменным (толчкообразным) характером нагрузки, в сетях с быстроизменяющимся непрограммируемым графиком нагрузки (например, в сети с одиночными и групповыми тиристорными электроприводами постоянного тока или со сварочными нагрузками).
Тиристорные компенсаторы могут применяться эффективно в сетях с любым графиком изменения реактивной нагрузки совместно с конденсаторными установками нерегулируемыми или со ступенчатым регулированием.
Тиристорные компенсаторы реактивной мощности обладают рядом преимуществ, в том числе автоматическим плавным поддержанием заданного значения коэффициента мощности; большим быстродействием; плавным регулированием реактивной мощности с ограничением выше номинального значения; возможностью (в связи с быстродействующей плавной автоматической компенсацией) поддержания стабильности питающего напряжения. Номинальная реактивная мощность компенсатора 125 кВАр, номинальный ток 190 А, напряжение сети 380 В, значение уставок коэффициента мощности 0,3—1, диапазон регулирования мощности 25— 125 кВАр.
Номинальная реактивная мощность компенсатора 125 кВАр, номинальный ток 190 А, напряжение сети 380 В, значение уставок коэффициента мощности 0,3—1, диапазон регулирования мощности 25— 125 кВАр.
Конструктивно тиристорный компенсатор выполнен в виде шкафа, остовом которого служит каркас из профилированной стали, закрытый металлической обшивкой, а снизу—сеткой с отверстиями для ввода подводящих кабелей или шин. Обслуживание компенсатора двустороннее со стороны передней и задней дверец. Для удобства обслуживания элементы автоматики расположены поблочно на панелях, которые по ламелям соединяются штепсельными разъемами с остальными элементами схемы компенсатора. Длина компенсатора 1000, высота 2000, глубина 820 мм. Масса — не более 900 кг.
Транзисторный компенсатор реактивной мощности
Статические компенсаторы реактивной мощности
В рыночных экономических условиях необходимо внедрение компенсирующих устройств в целях уменьшения потерь электроэнергии при ее транспортировании, повышения надежности электроснабжения, увеличения пропускной способности межсистемных связей.

До создания статических тиристорных компенсаторов для регулирования напряжений, повышения статической и динамической устойчивости сетей, снижения перенапряжений использовали синхронные компенсаторы или коммутируемые батареи конденсаторов и реакторы. Установка шунтовых реакторов и конденсаторов в электрической сети способствовала улучшению реактивных параметров сети, но не обеспечивала быстрого и непрерывного регулирования реактивной мощности (РМ). Замена этих устройств статическими компенсаторами, получившими широкое распространение за рубежом, была вызвана необходимостью обеспечения требуемых параметров энергосистемы, надежности и ремонтопригодности оборудования.
В современных системах электроснабжения все большее значение приобретают устройства компенсации РМ, позволяющие непрерывно поддерживать необходимый баланс РМ. Устройствами, отвечающими высоким требованиям по быстродействию и плавности регулирования, являются статические компенсаторы реактивной мощности (КРМ). Статические тиристорные компенсаторы находят все большее применение в электроэнергетических системах для регулирования напряжения в узлах нагрузки [1]. Актуальность создания надежного и эффективного управляемого статического источника реактивной мощности (ИРМ) очевидна [2]. Определению оптимальных параметров статического тиристорного компенсатора посвящена статья [3]. Однако в статическом тиристорном компенсаторе [3] номинальное напряжение тиристорного коммутатора должно приниматься равным номинальному напряжению шин подстанции [4], к которым подключен статический тиристорный компенсатор.
Актуальность создания надежного и эффективного управляемого статического источника реактивной мощности (ИРМ) очевидна [2]. Определению оптимальных параметров статического тиристорного компенсатора посвящена статья [3]. Однако в статическом тиристорном компенсаторе [3] номинальное напряжение тиристорного коммутатора должно приниматься равным номинальному напряжению шин подстанции [4], к которым подключен статический тиристорный компенсатор.
Автором [1] в предложенной схеме регулируемого ИРМ используется схема регулируемой части статического тиристорного компенсатора [4], однако номинальное напряжение тиристорного коммутатора в ИРМ может быть принято в несколько раз ниже, чем в статическом тиристорном компенсаторе. Для обоснования особенностей выбора параметров оборудования ИРМ проведен сравнительный анализ параметров установившихся режимов регулируемых ИРМ и статических тиристорных компенсаторов [1], получены зависимости от угла отпирания тиристоров α. Определены диапазоны регулирования выдаваемой реактивной мощности ИРМ 35, 110 и 220 кВ. Возможно многофункциональное использование в энергосистемах статических тиристорных КРМ, и, в частности, для снижения коммутационных перенапряжений на воздушных линиях электропередачи [5]. Построение электрических схем статических тиристорных КРМ и их оптимизация должны проводиться с учетом требований по снижению коммутационных перенапряжений, если такая задача ставится в конкретных случаях использования статического тиристорного компенсатора в энергосистеме. Вопросы применения статических тиристорных КРМ для снижения коммутационных перенапряжений исследовались в [5].
Возможно многофункциональное использование в энергосистемах статических тиристорных КРМ, и, в частности, для снижения коммутационных перенапряжений на воздушных линиях электропередачи [5]. Построение электрических схем статических тиристорных КРМ и их оптимизация должны проводиться с учетом требований по снижению коммутационных перенапряжений, если такая задача ставится в конкретных случаях использования статического тиристорного компенсатора в энергосистеме. Вопросы применения статических тиристорных КРМ для снижения коммутационных перенапряжений исследовались в [5].
Для улучшения динамических свойств статических тиристорных КРМ с фильтрокомпенсирующими цепями требуется надежный аппарат, осуществляющий их коммутацию при интенсивных переходных процессах. В качестве коммутационного аппарата могут использоваться тиристорные коммутаторы, что приведет к некоторому увеличению стоимости статических тиристорных КРМ. Работа потребителей, содержащих в своем составе нелинейную нагрузку, сопровождается искажением формы кривой тока и напряжения, нормируемых согласно ГОСТ 13109-87, по коэффициенту несинусоидальности напряжения kHC. Эти искажения отрицательно влияют на режим работы сети и потребителя, вызывая дополнительные потери мощности и электроэнергии в питающих линиях и оборудовании, резонансы токов и напряжений, сбои в работе ПЭВМ, автоматики и др.
Эти искажения отрицательно влияют на режим работы сети и потребителя, вызывая дополнительные потери мощности и электроэнергии в питающих линиях и оборудовании, резонансы токов и напряжений, сбои в работе ПЭВМ, автоматики и др.
При работе автономных (судовых, корабельных, сельскохозяйственных) электроэнергетических систем, содержащих мощную преобразовательную нагрузку, такие отрицательные последствия приобретают особое значение [6–8]. С целью компенсации высших гармонических и контроля качества напряжения в автономных электроэнергетических системах необходимо:
- при проектировании расчетным путем определить амплитуды и фазы высших гармоник и коэффициент несинусоидальности в отдельных узлах сети;
- при эксплуатации проводить измерения гармонического состава тока, напряжения и коэффициента несинусоидальности в этих же узлах.
На основе этих данных вырабатываются практические рекомендации по выбору схемы и параметров средств компенсации высших гармонических с учетом оптимизации массогабаритных показателей выбранного оборудования (например, фильтра высших гармоник). Решение этой задачи усложняется тем, что масса и габариты применяемого оборудования изменяются дискретно. Оптимальное решение может быть получено только с помощью САПР, позволяющей обрабатывать большое количество вариантов, в том числе нестандартных. Это качество может быть обеспечено путем модульного построения информационных, программных и технических средств таких систем.
Однофазный вентильно-конденсаторный ИРМ с частотным регулированием [9] в ряде случаев может быть использован для компенсации не только индуктивной составляющей тока нелинейной нагрузки, но и одной из нечетных гармоник этого тока. Быстродействие таких компенсаторов равно половине периода напряжения сети (как и резонансных фильтров, снабженных мостовыми тиристорными выключателями). Для генерирования в сеть нечетной гармоники тока регулируемой фазы необходимо:
- частоту импульсов управления тиристорными коммутаторами установить равной удвоенной частоте сети;
- фазу импульсов управления сделать регулируемой;
- емкость конденсатора и индуктивность входного реактора вентильно-конденсаторного ИРМ выбрать из условия резонанса (с учетом индуктивности сети) на частоте ν-й гармоники тока нелинейной нагрузки.
Амплитуды основной и высшей гармоник сетевого тока вентильно-конденсаторного ИРМ постоянны и не зависят от изменения фазы импульсов управления тиристорными коммутаторами. Амплитуда высшей гармоники сетевого тока вентильно-конденсаторного ИРМ в ν раз больше амплитуды его основной гармоники [9].
Наиболее оптимальным является использование вентильно-конденсаторных ИРМ в сетях со «спокойными» или периодически включаемыми нелинейными нагрузками, в которых амплитуды основной и высших гармоник потребляемого тока постоянны по величине или изменяются в незначительных пределах.
IGBT КРМ дискретного типа (КРМ ДТ)
Силовая часть компенсатора состоит из четырех секций конденсаторных батарей (КБ 1, КБ 2, КБ 3, КБ 4) с соотношением мощностей 1:2:4:8, при этом конденсаторы каждой секции включены треугольником. Каждая из секций конденсаторов подключается к сети посредством последовательно соединенных с ними бесконтактных коммутаторов, выполненных на основе IGBT (ТК1, ТК2, ТКЗ, ТК4). Такая организация силовой части КРМ позволяет, во-первых, значительно сократить количество коммутационно-защитной аппаратуры, во-вторых, обеспечить 15 (с нулевым уровнем — 16) ступеней регулирования РМ компенсатора, обеспечивая достаточно плавное изменение мощности при широком диапазоне регулирования.
Важнейшей особенностью предлагаемого КРМ по сравнению с применяемыми в настоящее время устройствами является то, что с целью исключения бросков тока в КБ при коммутациях подключение конденсаторов к сети происходит не в произвольный момент времени, а в момент равенства мгновенного напряжения сети и остаточного напряжения на конденсаторах.
Силовая часть компенсатора состоит из четырех секций КБ, мощности которых относятся друг к другу как 1:2:4:8. Такое построение силовой схемы статического транзисторного коммутатора (СТК) позволяет сократить количество коммутационной аппаратуры при достаточно широком диапазоне регулирования мощности КБ [10].
Поскольку полная РМ проектируемой установки составляет 600 кВАр, мощность одной ступени регулирования определяется следующим образом:
ΔQ = 600/15= 40 кВАр.
Мощности первой, второй, третьей и четвертой секций конденсаторной батареи соответственно равны:
Q1 = 40 кВАр;
Q2 = 80 кВАр;
Q3 = 160 кBAp;
Q4 = 320 кВАр.
Суммарная емкость конденсаторов одной секции конденсаторной батареи определяется из выражения [10]:
Q=ωCU2.
Отсюда получаем соответственно:
С2 = 1764 мкФ;
С3 = 3528 мкФ;
С4 = 7056 мкФ.
Таким образом, емкости конденсаторов, подключенных в каждую фазу одной секции соответствующих ступеней, будут равны:
С ав1= С вс1 = С са1 = 294 мкФ;
С АВ2 = С ВС2 = С СА2 = 588 мкФ;
С АВ3 = С ВС3 = С СА3 = 1176 мкФ;
С АВ4 = С ВС4 = С СА4 = 2352 мкФ.
Фазные токи секций батарей конденсаторов определим как:
IФ1=380 ×314×294×10–6=35,1 А;
IФ2=70,2 А;
IФ3=140,4 А;
IФ4=280,8 А.
Тогда линейные токи каждой из секций будут равны:
IЛ1 = √3×IФ1 = 60,8 А;
IЛ2 = 121, 6 А;
IЛ3 = 243,2 А;
IЛ4 = 486,4 А.
На основании приведенных выше расчетов целесообразно применить косинусные конденсаторы марки КЭС1-0,66-40-2У1. Емкость одного такого конденсатора С = 292 мкФ. Таким образом, в каждой фазе первой секции содержится по одному конденсатору, второй секции — по два параллельно соединенных конденсатора, третьей секции — по четыре, четвертой секции — по восемь.
Для коммутации батарей конденсаторов предлагается применять вместо тиристоров IGВТ. Управление транзисторными ключами существенно отличается от управления тиристорами. Транзистор является полностью управляемым ключом, его можно открывать и закрывать в любые моменты времени, поэтому система управления должна быть точно синхронизирована с сетью и выдавать команды ключу не только на включение, но и на выключение [10].
IGВТ обладают достаточно малым временем переключения. Это позволяет с высокой точностью переключать транзисторы в моменты перехода тока конденсаторов через ноль, а также включать транзисторные ключи в момент времени, когда мгновенное значение напряжения питающей сети и остаточное напряжение на конденсаторе будут равны по величине. Последнее условие, как указывалось выше, позволяет избежать возникновения переходных процессов в КБ при ее подключении к сети.
Выбор силовых транзисторов производится по максимальному напряжению между коллектором и эмиттером и номинальному току через транзистор. Амплитуда напряжения между коллектором и эмиттером на закрытом IGBT может достигать значения:
UTm=2×Ua=2×√2×U=2×√2×380=1075 В
Это возможно, если конденсатор был заряжен до амплитудного значения напряжения сети. Таким образом, транзистор должен выдерживать эту разность потенциалов с некоторым запасом.
В рассматриваемом КРМ предлагается использовать силовые IGBT-модули фирмы Mitsubishi. Однако это не исключает возможности использования силовых модулей других производителей, имеющих такие же основные параметры, как приведенные ниже для IGBT-модулей Mitsubishi. Каждый модуль содержит два IGBT (коллектор одного из транзисторов соединен с эмиттером другого) и два защитных диода, включенных между эмиттером и коллектором транзисторов, т. е. в одном модуле расположены все компоненты для построения транзисторного ключа.
Для коммутации четвертой, самой мощной секции используется модуль CM400DU-24F со следующими параметрами:
- максимальное напряжение коллектор–эмиттер Uкэm = 1200 В;
- постоянный ток через коллектор–эмиттер Iкэм = 400 А;
- управляющее напряжение U3э = ± 20 В;
- типовое падение напряжения на открытом транзисторе Uкэ0 = 1,8 В;
- входная емкость модуля Свх = 160 нФ;
- эквивалентный входной заряд QBX = 4400 нК;
- максимальное время включения tBKJI = 650 нс;
- максимальное время выключения tBbIKЛ = 1300 нс;
- максимальный входной ток утечки Iвх.у = 80 мкА;
- максимальный ток через закрытый транзистор Iкэ.т = 2 мА.
Для коммутации третьей секции подходит модуль CM200DU-24H, для коммутации второй секции — модуль CM100DU-24H, для первой — CM50DU-24H. Основные параметры выбранных IGBT-модулей представлены в таблице 1.
Тип модуля | Uкэm, B | Iкэm, А | Uзэ, B | Uкэ0, B | Cвх, нФ | Qвх, нК | tвкл, нс | tвыкл, нс | Iвх.у, мкА | Iкэ.т, мА |
CM400DU-24F |
| 400 |
| 1,8 | 160 | 4400 | 650 | 1300 | 80 | 2 |
CM200DU-24H | 1200 | 200 | ±20 | 2,4 | 60 | 1400 | 550 | 850 | 2 | 2 |
CM100DU-24H |
| 100 |
| 2,5 | 16 | 400 | 450 | 650 | 0,5 | 1 |
CM50DU-24H |
| 50 |
| 2,3 | 8,2 | 200 | 450 | 600 | 0,5 | 1 |
Резонансные явления и компенсация гармоник компенсатором на IGBT
На практике проверка возможности резонансных явлений в электроэнергосистеме энергоблока, электроэнергетическая система (ЭЭС) которого включает шесть трансформаторов типа ТМ-730, три эквивалентных двенадцатифазных преобразователя ВАКЗС-500-330, а также КБ суммарной мощностью 200 кВАр, показала, что при работе двух синхронных генераторов (СГ), тиристорных преобразователей и КБ в системе возможен резонанс на 7-й гармонике.
Экспериментальные исследования, проведенные на энергоблоке, показали значительное резонансное усиление нескомпенсированных 5-й и 7-й гармоник (до 10%) в контуре СГ–КБ, что согласуется с теорией [11].
Частотные характеристики и выбор параметров компенсатора на IGBT
Проблема выбора параметров КРМ ДТ не ограничивается только определением величины максимальной (суммарной) емкости секции КБ, исходя из величины РМ нагрузки, подключенной к рассматриваемому узлу питающей сети (шинам низкого напряжения трансформаторной подстанции). При выборе емкости следует также принимать во внимание частотные характеристики узла питающей сети во избежание возможности возникновения нежелательных, с точки зрения эксплуатационной надежности и устойчивости системы, резонансных режимов в контурах, образуемых емкостью КРМ ДТ и индуктивностями иных элементов системы.
Однолинейная схема замещения условно-типовой системы электроснабжения (цеховой подстанции), включающей в себя КРМ ДТ, приведена на рис. 1. На схеме выделены: питающий трансформатор Тр, асинхронная нагрузка АД1… АДn, обобщенная нагрузка xR (в том числе нелинейная — полупроводниковый преобразователь ТПр) и КРМ ДТ, состоящий из четырех секций КБ.
Рис. 1. Однолинейная схема условно-типовой цеховой подстанции
Величины РМ, сопротивления и проводимости КБ определяются известными соотношениями [12, 13]:
Емкость КБ определяется по выражению:
Анализ схемы проведем, используя схему замещения для первой гармоники (рис. 2).
Рис. 2. Схема замещения для первой гармоники
Параметры КБ должны быть выбраны таким образом, чтобы реактивные сопротивления КБ
и
не создавали резонанса с реактивным сопротивлением питающего трансформатора на частоте основной гармоники.
Суммарную емкость КБ можно определить как сумму k членов геометрической прогрессии
где Cn=C1×2n–1 — емкость n-ой ступени КБ; C1— емкость первого члена геометрической прогрессии; 2 — знаменатель прогрессии;
n — номер взятого члена.
Последнее выражение можно записать иначе:
CSmax=20C1+21C1+22C1+23C1=15C1. (1)
С учетом дискретного способа включения КБ, уравнение (1) можно переписать следующим образом:
CSmax=[A(1)20C1+A(2)21C1+A(3)22C1+A(4)23C1]–A(5), (2)
где А(1)… А(5) — коммутационные функции, принимающие одно из двух фиксированных значений («0» или «1»), которые определяются алгоритмом работы и уставкой системы управления КРМ ДТ.
Для идеального параллельного контура индуктивность трансформатора — емкость КБ собственная резонансная частота (w0) определяется как
А поскольку, в соответствии с (1) и (2), емкость КБ может изменяться в пределах C1≤CКБ≤15C1, то собственная резонансная частота узла питающей сети будет изменяться в пределах min w0Tmax≤w0T≤w0, причем частота w0Tmax соответствует емкости C1, а w0 — емкости 15C1.
Из анализа АЧХ параллельного колебательного контура (рис. 3) [13] следует, что в диапазоне частот от 0 до w 0T параллельный контур обладает индуктивной реакцией, а после w 0T — емкостной реакцией.
Рис. 3. Частотные характеристики параллельного колебательного контура
При полной компенсации РМ в сети имеет место резонанс (cosj = l), что нежелательно из-за сверхтоков в трансформаторе и КБ.
Из анализа АЧХ следует, что рабочая частота параллельного контура w =2pf=314 рад/с должна лежать в диапазоне 0<w<w0T, причем, так как w 0T при переключении КБ изменяется в определенном диапазоне w0T max≤w0T≤w0, то выбор емкости КБ необходимо проводить, исходя из условия, что min
Выводы
Рассмотрены особенности резонансных явлений в электроэнергетических системах питания судов (кораблей) с берега с мощными полупроводниковыми преобразователями, вызванных высшими гармониками тока и напряжения, появляющимися в ЭЭС в результате работы мощных полупроводниковых преобразователей. Определены соотношения, позволяющие производить детерминированную оценку возможности возникновения в ЭЭС резонансных режимов. Проведена практическая проверка установленных зависимостей, подтверждающая полученные теоретические выводы.
Представлены частотные характеристики условно-типовой системы электроснабжения, содержащей КРМ ДТ на IGBT, что необходимо для правильного выбора параметров транзисторного компенсатора во избежание возможности возникновения нежелательных, с точки зрения эксплуатационной надежности и устойчивости системы, резонансных режимов в контурах, образуемых емкостью КРМ ДТ и индуктивностями иных элементов системы.
Литература- Сидоров В. С. Сравнительный анализ параметров установившихся режимов регулируемых источников реактивной мощности и статических тиристорных компенсаторов // Известия вузов. Энергетика. 1990. № 10.
- Черников Г. Б. Управляемый статический источник реактивной мощности // Электричество. 1981. № 10.
- Азарьева Е. Д. Определение оптимальных параметров статического тиристорного компенсатора // Электричество. 1988. № 7.
- Азарьев Д. И. Статический тиристорный компенсатор на подстанции 500 кВ «Луч» // Электрические станции. 1985. № 9.
- Ильиничнин В. В. Применение тиристорных компенсаторов для снижения коммутационных перенапряжений в линиях электропередачи // Электрические станции. 1990. № 1.
- Приходько В. М. Технико-экономический анализ судовых электроэнергетических систем с полупроводниковыми преобразователями. Юбилейная XV Санкт-Петербургская международная конференция «Региональная информатика (РИ–2016)». 26–28 октября 2016. Материалы конференции. СПб.: РАН, 2016.
- Приходько В. М. Особенности технико-экономического анализа судовых электроэнергетических систем с мощными преобразовательными устройствами // Речной транспорт (XXI век). 2016. № 3.
- Приходько В. М. Проектирование судовых электроприводов переменного тока с преобразователями частоты. СПб.: ГУМРФ им. адм. С. О. Макарова, 2013.
- Федий В. С. Вентильный компенсатор индуктивного тока и нечетной гармоники на основе резонансного фильтра // Техническая электродинамика. 1990. № 6.
- Приходько В. М. Эффективность компенсатора реактивной мощности дискретного типа // Журнал университета водных коммуникаций. СПб.: СПГУВК, 2012. Вып. III (XV).
- Приходько В. М. Резонансные явления в электроэнергетических системах с полупроводниковыми преобразователями при питании судов с берега // Журнал университета водных коммуникаций. СПб.: ГУМРФ им. адм. С.О. Макарова, 2013. Вып. III (XIX).
- Бессонов Л. А. Теоретические основы электротехники. М.: Высшая школа, 1996.
- Калантаров П. Л. Теоретические основы электротехники. Часть вторая. Теория цепей переменного тока. М.–Л.: Госэнергоиздат, 1959.
Рис. 1. Однолинейная схема СТК
к сетевым трансформаторам
СХЕМА И ПРИНЦИП ДЕЙСТВИЯ Основная схемная конфигурация СТК включает в себя набор фильтров высших гармоник – фильтрокомпенсирующих цепей (), постоянно подключенных к сети или коммутируемых выключателями,
ПодробнееОсновные сведения о изделиях:
Современные высоковольтные преобразователи частоты переменного тока – мощные комплектные регулируемые электроприводы VCH ООО “ЭЛПРО-М” совместно с ЗАО «Восток-Электро» предлагает поставку современных высоковольтных
ПодробнееБАТАРЕИ СТАТИЧЕСКИХ КОНДЕНСАТОРОВ
БАТАРЕИ СТАТИЧЕСКИХ КОНДЕНСАТОРОВ Батарея статических конденсаторов 6,3-10,5 кв Батарея статических конденсаторов 27,5-35 кв Батарея статических конденсаторов 110-220 кв Батарея статических конденсаторов
ПодробнееУДК (083.96)
УДК 621.311.1(083.96) МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ПРЕДОТВРАЩЕНИЮ ФЕРРОРЕЗОНАНСА В РАСПРЕДЕЛИТЕЛЬНЫХ УСТРОЙСТВАХ 110-500 кв С ЭЛЕКТРОМАГНИТНЫМИ ТРАНСФОРМАТОРАМИ НАПРЯЖЕНИЯ И ВЫКЛЮЧАТЕЛЯМИ, СОДЕРЖАЩИМИ ЕМКОСТНЫЕ
ПодробнееСистема самовозбуждения ССТЕ ,5-УХЛ4
Системы возбуждения серий ССТЕ, СТРЕ турбогенераторов мощностью до 800 МВт для питания обмоток возбуждения автоматически регулируемым постоянным током в нормальных и аварийных режимах работы Системы ССТЕ
Подробнееэ л е к т р о э н е р г е т и к а
э л е к т р о э н е р г е т и к а УДК 61.315 ПРИМЕНЕНИЕ УПРАВЛЯЕМЫХ ГИБКИХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ В ЭЛЕКТРИЧЕСКИХ СЕТЯХ ЭНЕРГОСИСТЕМ Засл. деятель науки и техн. РБ, докт. техн. наук, проф. ПОСПЕЛОВ Г. Е.,
ПодробнееПотери электрической энергии
Потери электрической энергии Укрупнённая структура потерь Отчётные потери Технологические потери Технические потери Расход на собственные нужды подстанций Потери, обусловленные инструментальны ми погрешностями
ПодробнееПРЕДИСЛОВИЕ 3 ВВЕДЕНИЕ 5
ПРЕДИСЛОВИЕ 3 ВВЕДЕНИЕ 5 Глава 1. СТРУКТУРА СИСТЕМЫ ЭЛЕКТРОСНАБЖЕНИЯ И ЭЛЕКТРИЧЕСКОГО ХОЗЯЙСТВА ПРОМЫШЛЕННОГО ПРЕДПРИЯТИЯ 8 1.1. Понятие об электроснабжении и системах электроснабжения 8 1.2. Требования,
ПодробнееСИЛОВЫЕ КОНДЕ НСАТОРЫ
СИЛОВЫЕ КОНДЕНСАТОРЫ Постоянная работа в сфере высоковольтных технологий и улучшения качества выпускаемых продуктов делает АББ лидером в области производства силовых конденсаторов. АББ имеет более чем
ПодробнееКОМПЕНСАЦИЯ РЕАКТИВНОЙ МОЩНОСТИ
Министерство образования и науки Российской Федерации Саратовский государственный технический университет КОМПЕНСАЦИЯ РЕАКТИВНОЙ МОЩНОСТИ Методические указания к лабораторной работе по спецкурсу «Проектирование
ПодробнееЭлектрическая схема соединений
3.1 Лабораторный практикум 3 ДИДАКТИЧЕСКИЕ МАТЕРИАЛЫ Основная часть курса в разработке. Лабораторная работа 1 Снятие угловых характеристик синхронного генератора Электрическая схема соединений Обозначение
Подробнее– проверка качества дистиллята,
Главный инже ер про. 000 “Омск х г л 11 11 /3 11 ов Галимский Е.В. CG,го/у г. УТВЕРЖДАЮ Директор инжн ин ого центра 000 “Омскте род 11 Биндюк Ю.А. ” 43 ” ‘~ 1=О/% г. Ведомость объемов работ Ns 155 Строительство
ПодробнееE Установки конденсаторные УКМ58 (59; 61; 62)
Установки конденсаторные УКМ58 (59; 61; 62) Установки предназначены для повышения коэффициента мощности электроустановок промышленных предприятий и распределительных сетей напряжением 0,38 и 0,4 кв частотой
Подробнеег. Архангельск 2015 г.
Компенсация реактивной мощности и повышение качества электрической энергии эффективный способ повышения надежности электроснабжения ООО «Матик Про», г. Архангельск 2015 г. Более 10 лет компания «Матик-Про»
ПодробнееСтатические тиристорные компенсаторы (СТК) 6, 10, 35 кВ
Каталог СТК
Опросный лист СТК 6, 10, 35 кВ
Принцип действия статического тиристорного компенсатора (СТК):
Статический тиристорный компенсатор является регулируемым источником реактивной мощности, подключенным непосредственно на шины потребителя. Реактивная мощность СТК вырабатывается конденсаторами фильтров высших гармоник и равна максимальной реактивной мощности, необходимой для потребителя. Регулирование реактивной мощности производится при помощи статического тиристорного компенсатора, который управляет током реакторов, компенсируя избыточную реактивную мощность конденсаторов фильтров высших гармоник.
Система управления и защиты СТК обеспечивает быструю компенсацию реактивной мощности нагрузки и поддержание регулируемого параметра, выполняет защиту оборудования, контроль и сигнализацию отказов и может быть модифицирована под конкретные требования Заказчика. Время реакции системы регулирования СТК на изменение регулируемого параметра составляет 5 мс для нагрузок типа ДСП и 25–100 мс для общепромышленных нагрузок и сетевых подстанций.
СТК имеет уровень автоматизации, обеспечивающий его работу без постоянного присутствия персонала.
Номинальная мощность и схема СТК выбирается для конкретного объекта в зависимости от параметров системы электроснабжения, вида и мощности компенсируемой нагрузки.
Компенсация реактивной мощности позволяет:
- снизить тепловые потери тока и общие расходы на электроэнергию за счет повышения cosφ;
- уменьшить нагрузку на элементы распределительной сети (подводящих линий, трансформаторов и распределительных устройств), тем самым продлевая их срок службы;
- устранить влияние высших гармоник — обеспечить повышение производительности технологического оборудования за счет снижения аварийности, связанной с нарушением работы и выходом из строя элементов сети (кабельные линии, силовые трансформаторы), микропроцессорной техники;
- добиться большей надежности и экономичности распределительных сетей, как результат -снизить эксплуатационные издержки;
- для дуговых электросталеплавильных печейсократить время цикла плавки, снизить расходы на электроды и футеровку, существенно уменьшить эффект фликера;
- привести в соответствие нормам ГОСТ 13109–97 «Электрическая энергия» уровень помех в виде высших гармонических составляющих, генерируемых потребителями электроэнергии в питающую их сеть.
Экономический эффект внедрения СТК:
Работа технологического электрооборудования в условиях неноминальных режимных параметров питающей сети и значительной несинусоидальности питающего напряжения приводит к существенному экономическому ущербу, определяемому:
- повышением энергоёмкости производства;
- увеличением себестоимости продукции;
- сокращением срока службы электрооборудования;
- снижением надежности работы.
Компенсация потребляемой реактивной мощности, снижение уровня ВГС, обеспечение постоянного уровня напряжения и снижение провалов напряжения в условиях резкопеременной несинусоидальной нагрузки позволяют обеспечить значительное повышение эффективности и экономичности эксплуатационных режимов технологического оборудования.
Регулирование реактивной мощности производится при помощи статического тиристорного компенсатора, который управляет током реакторов, компенсируя избыточную реактивную мощность конденсаторов фильтров высших гармоник.
Система управления и защиты СТК обеспечивает:
- быструю компенсацию реактивной мощности нагрузки и поддержание регулируемого параметра;
- выполняет защиту оборудования СТК, контроль и сигнализацию отказов;
- может быть модифицирована под конкретные требования Заказчика.
Время реакции системы регулирования СТК на изменение регулируемого параметра составляет 5 мс для нагрузок типа ДСП и 25–100 мс для общепромышленных нагрузок и сетевых подстанций. СТК имеет уровень автоматизации, обеспечивающий его работу без постоянного присутствия персонала.
Номинальная мощность и схема СТК выбирается для конкретного объекта в зависимости от параметров системы электроснабжения, вида и мощности компенсируемой нагрузки.
Основные компоненты СТК:
Статический тиристорный компенсатор – Большая Энциклопедия Нефти и Газа, статья, страница 1
Статический тиристорный компенсатор
Cтраница 1
Статические тиристорные компенсаторы ( СТК) – это комплексные устройства, предназначенные как для выдачи, так и для потребления реактивной мощности. Основу СТК составляют накопительные элементы ( емкости, индуктивности), ре-акторно-тиристорные и конденсаторно-тиристорные блоки. СТК за счет тиристорного управления обладают исключительным быстродействием и осуществляют безинер-ционное плавное регулирование ( наибольшая скорость регулирования от 1 % до 100 % за 0 3 сек) реактивной мощности во всем диапазоне от мощности, генерируемой конденсаторами, до мощности, потребляемой индуктивностью. СТК имеют различные схемы подключения к высоковольтной сети и управления потребляемой реактивной мощностью. [2]
Потери в статических тиристорных компенсаторах определяют по такой же формуле. Тиристорные компенсаторы, как правило, имеют индивидуальную конструкцию, поэтому удельные потери в конкретном компенсаторе определяют на основе его паспортных данных. [3]
Такими ИРМ могут быть статические тиристорные компенсаторы, синхронные компенсаторы и др. Если путем выбора соответствующей мощности ИРМ обеспечить поддержание заданного напряжения U3, U4 в промежуточных точках линий, то она разделится на несколько самостоятельных участков. [5]
Шведская фирма АСЕА освоила выпуск статических тиристорных компенсаторов на уровне тех же мощностей, которые достигнуты и для синхронных компенсаторов. Поскольку производство элементов статических компенсаторов осуществляется на основе широкой механизации и автоматизации процессов, то их стоимость стала меньше стоимости вращающихся компенсаторов, производство которых связано с большим объемом ручных работ. [7]
На рис. 4.12 приведены основные схемы статических тиристорных компенсаторов, а на рис. 4.13 – их потери в полном диапазоне изменения их реактивных мощностей. Кривая 2 построена с учетом коммутации конденсаторной батареи и реактора, состоящих из двух равных частей. [8]
Конденсаторы типа КЭКФ и КЭКШ предназначены для силовых фильтров высших гармоник, в том числе работающих в составе статических тиристорных компенсаторов реактивной мощности, а также шунтовых батарей линий электропередачи постоянного тока, для компенсации блоков конденсаторов и конденсаторных установок с целью повышения коэффициента мощности. [10]
Особое значение преобретают разработанные быстродействующие тиристорные управляемые источники как генерируемой, так и потребляемой реактивной мощности, применяющиеся и в электроэнергетических системах для обеспечения баланса реактивной мощности не только в установившихся режимах, но и при переходных процессах. Они называются статическими тиристорными компенсаторами ( СТК) реактивной мощности. Теоретические и опытные разработки статических ИРМ впервые были проведены в СССР, а затем и за рубежом, где они широко применяются. [11]
Особое значение преобретают разработанные быстродействующие тиристорные управляемые источники как генерируемой, так и потребляемой реактивной мощности, применяющиеся и в электроэнергетических системах для обеспечения баланса реактивной мощности не только в становившихся режимах, но и при переходных процессах. Они называются статическими тиристорными компенсаторами ( СТК) реактивной мощности. Теоретические и опытные разработки статических ИРМ впервые были проведены в СССР, а затем и за рубежом, где они широко применяются. [12]
Рассматриваются устройства, компенсирующие реактивную мощность: статические конденсаторные батареи, шунтирующие реакторы, статические тиристорные компенсаторы ( СТК) и синхронные компенсаторы ( СК), а также устройства, компенсирующие реактивные сопротивления сетей: конденсаторные установки и реакторы продольного включения. [14]
Страницы: 1 2
Shunt Compensation – обзор
Повышение компенсации с 60% до, скажем, 70% может дополнительно улучшить описанную выше ситуацию, но это может быть нецелесообразно для поддержания высокого уровня стабильности во время нарушений в линии. Более того, п.ф. системы уже достигла максимального значения cos 6,95 °, то есть 0,99, что также не рекомендуется. Для большей безопасности уровень компенсации шунта следует немного уменьшить.
Примечание
Поскольку колебания нагрузки в распределительной сети HT будут только номинальными, а сеть также будет иметь достаточное сопротивление, должна быть возможность компенсировать систему до 70% или около того, для дальнейшего улучшения регулирования сети, скажем, до 5% от E s , без ущерба для уровня стабильности.Разработчик приложений может принять более разумное решение, зная, что состояние сети должно быть компенсировано.
Изменение напряжения с последовательной компенсацией, хотя и высокое, около 8,2%, все же можно контролировать путем регулировки ответвлений на трансформаторе передающего конца, для чего можно выбрать трансформатор с более высокими ответвлениями или трансформатор с более высоким вторичным напряжением может быть выбрано, скажем, 36 кВ или около того. Для незначительных регулировок можно использовать ответвления на трансформаторе на приемном конце.Таким образом, указанная выше система может использоваться с максимальной производительностью.
Смещение вектора между передающей и принимающей сторонами при использовании последовательной компенсации уменьшается, а напряжение на принимающей стороне приближается к напряжению на передающей стороне, что обеспечивает большую стабильность система во время нарушения работы линии.
Даже более высокое сечение линейных проводов могло бы улучшить описанную выше ситуацию за счет уменьшения сопротивления линии и, следовательно, падения напряжения.
Уместно отметить, что последовательная компенсация на линиях HT будет более эффективной, когда индуктивное реактивное сопротивление самой линии высокое, например, когда линия индивидуально питает высокоиндуктивные нагрузки, такие как индукция или дуга. печь или другие подобные нагрузки. Тем не менее, его также можно эффективно применять в перегруженных распределительных сетях, подобных рассмотренной выше, для увеличения пропускной способности линии и уменьшения провалов напряжения на приемном конце.
Для больших концентраций нагрузок, например, для промышленных или жилых районов, и там, где в будущем вероятно добавление дополнительных нагрузок, прогнозы реалистичной загрузки линий могут не соответствовать. Поэтому, особенно для растущих городов, рекомендуется сначала установить немного большую первичную распределительную сеть, чтобы удовлетворить растущие потребности в электроэнергии. Считается, что для таких центров нагрузки 11 кВ или даже 33 кВ. распределение неадекватное. Соизмеримым первичным распределением для таких мест можно считать 66 кВ, а в жилых и промышленных зонах или общественных местах следует использовать подземные кабели, чтобы свести к минимуму риск прокладки линий с таким высоким напряжением на открытом воздухе, а также сохранить ограниченную зону нагрузки.Подземная кабельная разводка дороже, чем надземная, но более безопасна в перегруженных зонах. Использование надземной или подземной системы будет зависеть от местоположения, безопасности и удобства, помимо рассмотрения стоимости. Подробнее см. Лакерви и Холмс в дальнейшем чтении.
Примечание
В таких странах, как США и Япония, используются подземные кабели для передачи электроэнергии мощностью до 1000 МВт при напряжении 550 кВ.
Для обеспечения реактивной поддержки любой энергосистемы или сети, страдающих от колебаний напряжения или высоких потерь в линии, или когда чувствуется, что система не может передать требуемую нагрузку, важно сначала провести полевое исследование, для определения областей и подходящих мест, где реактивная поддержка была бы более уместной.Затем следует принять процедуру, аналогичную Примеру 24.3, для определения количества и типа реактивной поддержки.
Однофазное управление компенсацией реактивной мощности для STATCOM с помощью неизвестной оценки динамики системы
В этой статье разрабатывается однофазное управление компенсацией реактивной мощности для статического компенсатора (STATCOM). Основная новизна заключается в том, что компенсация реактивной мощности STATCOM переформулирована как эквивалентное отслеживающее управление для реактивного тока, а также исследуется новая неизвестная оценка динамики системы (USDE) для решения проблемы неизвестной динамики системы.Фаза моделирования, основанная на базовой структуре однофазного STATCOM и принципе STATCOM, сначала выполняется для описания его поведения. Для решения проблемы неизвестной динамики и внешних возмущений затем разрабатывается новый USDE, так что неопределенности моделирования и внешние возмущения могут быть учтены без использования аппроксиматора функций, что устраняет требовательные вычислительные затраты и утомительную настройку параметров в других схемах управления. Наконец, на основе предложенного оценщика мы проектируем составное управление с пропорционально-интегральным (ПИ) контроллером обратной связи и предлагаемым оценщиком для достижения точного отслеживания тока.Также дан анализ сходимости как ошибки оценки, так и ошибки управления. Результаты моделирования с использованием реалистичного симулятора представлены, чтобы показать эффективность предложенной стратегии.
1. Введение
Чтобы улучшить качество электроэнергии в энергосистемах, необходимо обеспечить пользователей экологически чистым электроэнергией и сделать напряжение стабильным. Однако на стабильность напряжения обычно влияют многие факторы, например, линии генерации, передачи и распределения, а также нелинейные компоненты в электрических сетях, все из которых вызывают колебания напряжения в сети [1–3].Кроме того, низковольтные однофазные индуктивные нагрузки широко используются в современных энергосистемах, таких как зарядные станции электромобилей, электровозы и т. Д., Что, в свою очередь, увеличивает потери реактивной мощности в энергосистемах [4 ]. Поэтому важно изучить однофазную динамическую компенсацию реактивной мощности для повышения устойчивости энергосистем [5].
Реактивный статический компенсатор (STATCOM), шунтирующий конденсатор, синхронный конденсатор и реактор насыщения (SR) широко используются в устройствах компенсации реактивной мощности.По сравнению с традиционными компенсирующими устройствами, STATCOM обладает преимуществами широкого рабочего диапазона, быстрой скорости отклика, небольшой емкости элементов накопления энергии и гибкости управления, а также может компенсировать реактивную мощность в двух направлениях [6]. Таким образом, она превратилась в современную технологию компенсации реактивной мощности, которая вызывает большой исследовательский интерес. STATCOM обычно подключается параллельно с энергосистемой 10 кВ, поэтому многоуровневая технология становится ключевой схемой этих типов устройств, применяемых в высоковольтной энергосистеме [7].В многоуровневой технологии [8] цепная топология стала основной структурой из-за ее высокой степени модульности, высокой эквивалентной частоты переключения, работы с резервированием и других преимуществ [9–13]. Баланс напряжения на стороне постоянного тока (DC) является предпосылкой безопасной и надежной работы цепи STATCOM. В противном случае перенапряжение шины постоянного тока, вызванное дисбалансом, приведет к повреждению конденсатора, возгоранию биполярного транзистора с изолированным затвором и другим серьезным неисправностям, которые приведут к отключению устройства и серьезно повлияют на безопасность и стабильность работы устройства. параллельная сетка.Поэтому многие исследователи [14–17] предложили стратегии управления балансом напряжения на стороне постоянного тока для STATCOM с цепной структурой, инвертором, подключенным к фотоэлектрической сети, силовым электронным трансформатором и другими устройствами.
Фактически, существующие методы управления для STATCOM включают косвенное управление током [18], управление постоянным током [19], управление переменной структурой скользящей пленки [20] и управление биениями [21], которые используют полностью известную динамику системы (т. Е. , нелинейная или линейная динамика). Однако, когда мы рассматриваем системы с неизвестной динамикой, нелинейностями, ошибками моделирования или возмущениями, которые обычны в энергосистемах, нелегко спроектировать контроллер для достижения удовлетворительной производительности.Недавно была предложена U-модель для решения нелинейной системной динамики [22–25], которая была первоначально разработана Чжу и Го [26]. Однако в этой структуре снова требуется точная модель системы. В литературе требования к динамике системы могут быть ослаблены с точки зрения некоторых методов оценки и подавления возмущений, например, наблюдателей с высоким коэффициентом усиления [27, 28] и наблюдателей скользящего режима [29, 30]. Другой эффективный метод работы с неизвестной динамикой системы – это наблюдатель возмущений (DOB), о котором первоначально сообщалось в [31].Однако ранее разработанный DOB в основном подходит только для линейных систем. В последующих исследованиях были разработаны различные усовершенствованные ДОБ, такие как наблюдатель нелинейных возмущений (NDO) [32], наблюдатель расширенного состояния (ESO) [33] и наблюдатель неизвестного входа (UIO) [34]. Однако вышеупомянутые наблюдатели требуют разработки наблюдателя и требуют настройки множества параметров, что может оказаться непростой задачей для практиков. В этом отношении стоит продолжить исследование нового блока оценки с меньшим количеством параметров настройки и гарантированной сходимостью для решения неизвестных системных нелинейностей для систем управления STATCOM.
На основании вышеизложенного в данной статье будет разработан новый метод компенсации реактивной мощности для STATCOM с полностью неизвестной нелинейной динамикой и внешними возмущениями. Компенсация реактивной мощности STATCOM переформулирована как эквивалентное отслеживающее управление для требуемого реактивного тока. Затем мы строим модель однофазного СТАТКОМа на основе его физической структуры и принципа СТАТКОМА. Более того, новый конструктивный неизвестный системный динамический оценщик (USDE) разработан для устранения неизвестных возмущений и неопределенностей модели, так что аппроксиматор функции не нужен, а требующиеся вычислительные затраты и утомительная настройка параметров устраняются.Наконец, пропорционально-интегральный (ПИ) контроллер объединяется с предлагаемым устройством оценки в качестве упреждающей компенсации для достижения удовлетворительной реакции управления отслеживанием, так что могут быть достигнуты улучшенные рабочие характеристики. Также приводится анализ сходимости как ошибки оценки, так и ошибки управления, который также подтверждается с точки зрения моделирования на основе реалистичного объекта STATCOM.
Основные вклады в этот документ включают следующее: (1) Компенсация реактивной мощности STATCOM переформулирована как эквивалентное отслеживающее управление для требуемого реактивного тока.Это позволяет разрабатывать передовые стратегии управления для достижения улучшенных характеристик управления. (2) Новый USDE разработан для решения неизвестной системной динамики, неопределенностей моделирования и внешних возмущений, где аппроксиматор функции не требуется, и, следовательно, требующие больших вычислительных затрат и исправлена настройка сложных параметров. В отличие от обычного DOB и других наблюдателей, этот USDE имеет только один параметр настройки (усиление фильтра), и, таким образом, его легко реализовать.
Эта статья организована следующим образом: В разделе 2, на основе структуры однофазного СТАТКОМа и принципа СТАТКОМ, мы строим модель для описания поведения однофазного СТАТКОМа. В разделе 3 представлены предлагаемый USDE, конструкция составного контроллера и анализ устойчивости. Результаты моделирования приведены в разделе 4, а некоторые выводы сделаны в разделе 5.
2. Предварительные сведения и постановка задачи
2.1. Структура однофазного STATCOM
Основную структуру схемы STATCOM можно разделить на два типа (т.е.е., мостовая схема напряжения и мостовая схема тока). В этой статье СТАТКОМ однофазной мостовой схемы напряжения рассматривается как объект исследования для завершения компенсации реактивной мощности, поскольку он использовался во многих приложениях энергосистем. На рисунке 1 показана базовая структура однофазного STATCOM [7], которая в основном включает следующие три части.
2.1.1. Преобразователь источника напряжения (VSC)
В преобразователе источника напряжения выход переменного тока подключен к электросети, которая также состоит из двух пар для параллельных плеч моста, где каждая пара плеч моста соединена с двумя изолированными Биполярные транзисторы с затвором (IGBT) подключаются последовательно, и каждый IGBT соединен с одним диодом быстрого восстановления в обратной параллели.Основное назначение VSC – производить переменное напряжение из постоянного. Поэтому его обычно называют преобразователем постоянного тока в переменный.
2.1.2. Конденсатор
Конденсатор постоянного тока (DC) используется для хранения энергии и обеспечения напряжения для VSC.
2.1.3. Реактор связи
Помимо фильтрации возможных высших гармоник в выходном напряжении инвертора, реактор можно использовать для подключения источника напряжения между стороной преобразователя и стороной сети.
2.2. Принцип работы STATCOM
Согласно динамике реактора, самокоммутирующаяся мостовая схема связана с электросетью. Следовательно, схема может генерировать или поглощать ток, правильно регулируя фазу или амплитуду выходного напряжения на стороне переменного тока мостовой схемы или напрямую регулируя ток на стороне переменного тока мостовой схемы, чтобы реализовать динамическую реактивную мощность. компенсация [9–13]. Более того, принцип работы СТАТКОМа может быть представлен эквивалентной схемой, приведенной на рисунке 2.
На рисунке 2 это напряжение электросети и выходное переменное напряжение STATCOM. Напряжение реактора – это разница между и, а также ток, потребляемый STATCOM из электросети. Следует отметить, что, и – векторы, и, соответственно.
Как показано на рисунке 3, когда больше, ток опережает напряжение электросети, и STATCOM обеспечивает реактивную мощность для системы. Когда меньше, ток отстает от напряжения электросети, и STATCOM поглощает реактивную мощность из системы.
2.3. Моделирование однофазного STATCOM
Из рисунка 2 мы можем получить уравнение напряжения и тока как
Затем система быстро определяет реактивный ток. Посредством соответствующего управления выход STATCOM соответствует току компенсации реактивной мощности. Чтобы определить реактивный ток в нагрузке, теория мгновенной реактивной мощности [35] используется для преобразования однофазной системы в трехфазную.
Принимая as, задерживая и меняя его, мы получаем ток нагрузки c-фазы.Используя сумму трехфазного тока как 0, мы можем получить ток нагрузки b-фазы как
Эквивалентное преобразование d – q используется для трехфазного тока. Без ограничения общности будем считать, что ось d совпадает с вектором напряжения сети. Мы можем получить следующее уравнение: где и – активная и реактивная составляющие трехфазного тока, – матрица преобразования:
После получения реактивного тока нагрузки мы можем принять его в качестве эталонного значения STATCOM для компенсации реактивный ток.Кроме того, модель (1) может быть переписана следующим образом: где и – коэффициент усиления управления и сосредоточенные возмущения. Кроме того, это управляющий сигнал в (5). Отмечено, что это включает в себя динамику системы, обусловленную неизбежными нарушениями и колебаниями нагрузки в энергосистемах. Без ограничения общности мы предполагаем, что производная от ограничена, т. Е. Верна для константы. Следовательно, цель состоит в том, чтобы разработать надлежащий элемент управления, чтобы ток мог отслеживать опорный сигнал.
Замечание 1. В некоторых существующих результатах для схем управления STATCOM предполагается, что динамика системы полностью известна. Поскольку и в уравнении (5) являются динамическими переменными, мы можем рассматривать эту часть (т. Е. Переменную d ) как полное возмущение, которое необходимо компенсировать в конструкции управления, что значительно снизит усилие объединения и улучшит эффект отслеживания тока. . В этой области классические методы работы с неизвестной динамикой, такие как наблюдатели с высоким коэффициентом усиления [27, 28] и наблюдатели в скользящем режиме [29, 30], могут потребовать больших вычислительных затрат и достичь плохой сходимости (например.g., болтовня), что приводит к трудностям в практическом применении. Еще один эффективный метод работы с неопределенностями – это наблюдатель возмущений (DOB) [31]. Однако ранее разработанный DOB в основном подходит только для линейных систем. Хотя были разработаны различные усовершенствованные DOB, такие как наблюдатель нелинейных возмущений (NDO) [32], наблюдатель расширенного состояния (ESO) [33] и наблюдатель неизвестного входа (UIO) [34], вышеупомянутые наблюдатели требуют разработки наблюдателя, и они требуют настройки множества параметров, что может оказаться непростой задачей для практиков.Чтобы исправить эту проблему, в данной статье предлагается альтернативный USDE, который выполняет ту же функцию, что и DOB, но имеет более простую структуру и только один параметр настройки.
3. Комбинированный контроль тока с неизвестным оценщиком динамики системы
3.1. Неизвестная система оценки динамики
Чтобы обработать сосредоточенную неизвестную динамику в системе (5), мы предложим новый USDE, который можно оценить, используя измеренные входные и выходные данные. Для этой цели мы определяем и as отфильтрованные переменные и aswhere – постоянный параметр, обозначающий полосу пропускания принятого фильтра нижних частот.
Для разработки оценщика будет исследован принцип инвариантного многообразия. В этой строке мы сначала вводим следующий результат.
Лемма 1. (см. [36, 37]). Рассмотрим систему (5) и операцию фильтрации (6), переменная определяется как Затем эта переменная ограничена для любой конечной константы и экспоненциально сходится к нулю, то есть
Доказательство. Из (6) и (7) производная по времени определяется следующим образом: Выбрать функцию Ляпунова как такую, что согласно неравенству Юнга мы имеем Подставив (11) в (10), мы можем получить следующее неравенство: Решив неравенство (12) , в этом легко убедиться.Таким образом, будет сходиться к небольшому компактному множеству, ограниченному, где его размер определяется параметром фильтра и верхней границей, т. Е., Который обращается в нуль при достаточно малых и / или (т. Е. = 0). Это завершает доказательство.
Вышеупомянутое идеальное инвариантное многообразие обеспечивает отображение измеряемой переменной и неизвестной динамики системы. Таким образом, его можно использовать для разработки оценщика, для которого задается
. Очевидно, разработчик должен выбирать только скалярную константу, используемую в фильтре, что является тривиальной задачей по сравнению с существующими методами ESO и DOB.
Теперь мы имеем следующие результаты:
Теорема 1. (см. [36, 37]). Для системы (5) с неизвестным оценщиком динамики системы (13) ошибка оценивания ограничена и, следовательно, выполняется для и / или.
Доказательство. После применения операции фильтрации к обеим частям (5), мы можем получить Подставляя первое уравнение (6) в (14), мы получаем Сравнивая (13) с (15), это легко найти. Следовательно, ошибка оценки может быть получена как Для облегчения доказательства мы дополнительно выводим производную ошибки оценки в (13), поскольку Очевидно, ошибка оценки может быть очень маленькой, когда используется достаточно малая величина.Чтобы показать это, функцию Ляпунова можно выбрать как, а ее производную можно вычислить как Согласно неравенству Юнга, мы имеем Подставляя (19) в (18), мы можем получить следующее неравенство: Следовательно, можно вычислить решение неравенства (20) as, что дополнительно означает, что ошибка оценки ограничена, и, таким образом, мы можем требовать и / или. Это завершает доказательство.
Замечание 2. Из приведенного выше анализа мы знаем, что неизвестная динамика системы может быть точно оценена с помощью построенного USDE (13).Следует отметить, что предлагаемый USDE требует только операций фильтрации, приведенных в (6), и алгебраических вычислений, приведенных в (13). Более того, разработчикам необходимо установить только коэффициент усиления фильтра в (6). Следовательно, структура USDE проста, а ее реализация не вызывает затруднений.
3.2. Составная конструкция управления на основе USDE
В этом разделе вышеупомянутая оценка будет введена в схему управления для системы (5) для достижения текущего отслеживания. Кроме того, мы будем использовать расчетный член в (13) в качестве экстракомпенсатора, наложенного на ПИ-регулятор, чтобы разработать новый составной регулятор тока для установки STATCOM.Составное управление с предлагаемым USDE вместе с ПИ-регулированием [38] показано на рисунке 4.
Обозначим опорный сигнал тока. Ошибка отслеживания тока определяется следующим образом:
Для уменьшения ошибки отслеживания контроллер может быть спроектирован так, как где – выходное напряжение переменного тока STATCOM, обозначающее влияние пропорционального и интегрального коэффициентов усиления. – это недавно добавленная компенсация в дополнение к части управления с обратной связью, приведенной в (13).
Очевидно, что первая часть – это ПИ-регулятор, который используется для сохранения стабильности управляемой системы, а второй член – это оценка неизвестной динамики для достижения удовлетворительного отклика на отслеживание.Таким образом, устойчивость предложенной системы управления с оценкой и составным управлением, а также сходимость оценок и ошибок управления можно резюмировать следующим образом.
Теорема 2. Если составное управление (22) с оценкой (13) применяется для системы STATCOM (2), текущая ошибка отслеживания и ошибка оценки сходятся к небольшому компактному множеству около нуля и могут отслеживать желаемый эталон. обнаружен системой.
Доказательство. Выведя (21) и подставив (22) в (5), можно получить следующее уравнение: которое можно переписать как где.Чтобы справиться с интегральным членом, мы определяем расширенный вектор ошибок как и выбираем расширенную функцию Ляпунова как для положительно симметричной матрицы. Тогда (24) может быть записано как Предварительно сконфигурированные коэффициенты усиления ПИ-регулятора и установлены для сохранения стабильности системы управления, так что матрица может гарантировать экспоненциальную стабильность системы ошибок. Тогда, исходя из теории Ляпунова, существуют положительно определенные симметричные матрицы и такие, которые выполняются, и, таким образом, могут быть взяты в качестве функции Ляпунова для системы ошибок.В этом случае мы вычисляем производную по времени расширенной функции Ляпунова по (17) и (25), поскольку где – положительная константа из неравенства Юнга, а – положительные константы для правильно выбранных параметров и. Это означает, что; таким образом, ошибки управления и ошибка оценки экспоненциально сходятся к компактному малому множеству. Ясно, что и справедливы для и / или, для которых достаточно мало и / или является константой, и, таким образом, граница равна. Это завершает доказательство.
Как показано в приведенном выше доказательстве, ПИ-регулирование используется для обеспечения стабильности системы управления током СТАТКОМ. Затем оценка используется в качестве компенсации с дополнительным прогнозом для достижения подавления помех и, таким образом, лучшей производительности. В этом отношении эта идея обеспечивает структуру управления с двумя степенями свободы, в которой конструкция USDE не зависит от ПИ-регулирования, и, таким образом, даже в худшем случае без компенсатора управляемая система по-прежнему остается стабильной. Следовательно, предлагаемый оценщик может быть объединен с другими контроллерами STATCOM для достижения лучшего отклика управления.
4. Результаты моделирования и анализ
Недавно STATCOM был расширен для компенсации систем распределения. Целью данной статьи является разработка контроллера, который может управлять током STATCOM, чтобы завершить компенсацию системы распределения. Чтобы проверить эффективность модели системы и метода управления, предложенного в этой статье, мы построим имитационную модель на основе Matlab / Simulink. В системах нагрузка электровоза представляет собой типичную однофазную нагрузку, поэтому мы используем нагрузку сопротивления и индуктивности для моделирования индуктивной нагрузки электровоза.Вся имитационная модель состоит из трех частей: главной цепи, контроллера и измерительного модуля. Функция измерительного модуля заключается в обнаружении реактивного тока в нагрузке. Параметры системы, использованной в моделировании, представлены следующим образом: эффективное значение фазного напряжения сети, частота, подключенная индуктивность, индуктивная реактивная мощность нагрузки, равная Var, емкость на стороне постоянного тока и напряжение конденсатора. Чтобы показать структуру предлагаемой системы управления STATCOM, схема построенной модели Simulink представлена на рисунке 5.
Параметры ПИ-регулятора устанавливаются следующим образом: пропорциональное усиление и интегральное усиление. Кроме того, постоянная фильтра USDE равна. Чтобы проверить эффективность компенсации реактивной мощности STATCOM с / без предложенного метода управления, мы включаем STATCOM в цепь нагрузки на 0,2 с через прерыватель. Более того, чтобы дополнительно продемонстрировать эффективность предложенного подхода, наблюдатель скользящего режима, используемый в [39], также тестируется для сравнения с точки зрения оценки неизвестной динамики, а параметры, используемые в наблюдателе скользящего режима, задаются как и.
Когда для индуктивной нагрузки установлено значение Var, формы сигналов напряжения и тока на стороне сети показаны на рисунке 6. Сравнивая формы сигналов до и после 0,2 с, мы можем обнаружить, что перед вводом устройства в работу в качестве нагрузки, системы являются индуктивными, и индуктивная реактивная мощность должна поглощаться со стороны сети. Ясно, что ток системы отстает от напряжения системы, поэтому коэффициент мощности очень низкий. Тем не менее, после завершения компенсации реактивного тока для STATCOM напряжение и ток находятся в одной фазе, и, следовательно, коэффициент мощности также увеличивается.Следовательно, на Рисунке 7 мы можем увидеть, что коэффициент мощности увеличивается примерно с 0,7 до почти идеального значения 1. Текущий результат отслеживания показан на Рисунке 8, где предлагаемый составной элемент управления с PI-контролем и USDE может обеспечить удовлетворительную реакцию отслеживания. Текущая ошибка отслеживания приведена на рисунке 9, который показывает, что установившаяся ошибка сходится к 0 после ввода STATCOM в действие. Наконец, профили предполагаемой динамики с помощью USDE и SMO представлены на рисунке 10, что указывает на то, что при использовании USDE можно достичь более высоких показателей оценки, чем при использовании SMO.
Из приведенных выше результатов моделирования можно утверждать, что для системы электровоза предлагаемая комбинированная стратегия управления с контроллером USDE и PI может уменьшить ошибку колебаний тока и реализовать более эффективную компенсация реактивной мощности.
5. Заключение
В этой статье компенсация реактивной мощности STATCOM переформулирована как эквивалентное отслеживающее управление для требуемого реактивного тока.Сначала мы построим модель однофазного СТАТКОМа на основе его структуры и принципа действия СТАТКОМа. Затем предлагается новый USDE для рассмотрения сосредоточенной неизвестной динамики в модели STATCOM. С помощью предложенного USDE, наложенного на стандартное управление PI, можно получить составную структуру управления. Это обеспечивает структуру управления с двумя степенями свободы, в которой конструкция USDE не зависит от ПИ-регулирования, и, таким образом, даже в худшем случае без компенсатора управляемая система по-прежнему остается стабильной.Анализ сходимости как ошибки оценивания, так и ошибки управления тщательно изучен. Наконец, численное моделирование приводится для подтверждения теоретических утверждений и демонстрации эффективности предлагаемого метода.
Доступность данных
Данные подготовлены авторами и доступны по запросу.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в отношении публикации этой статьи.
IRJET-Запрошенная вами страница не найдена на нашем сайте
IRJET приглашает статьи из различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 5 (май-2021)
Отправить сейчас
IRJET Vol-8, выпуск 5 , Май 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
IRJET приглашает исследователей различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 5 (май 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 5, май 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
IRJET приглашает исследователей различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 5 (май 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 5, май 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
IRJET приглашает исследователей различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 5 (май 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 5, май 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
IRJET приглашает исследователей различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 5 (май 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 5, май 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
IRJET приглашает исследователей различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 5 (май 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 5, май 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
IRJET приглашает исследователей различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 5 (май 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 5, май 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
IRJET приглашает исследователей различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 5 (май 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 5, май 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
Знакомство с конденсаторными схемами коррекции коэффициента мощности – Блог о пассивных компонентах
Источник: блог Capacitor Faks
Часть мощности переменного тока, потребляемой индуктивными нагрузками, используется для поддержания инверсии магнитного поля из-за фазового сдвига между током и напряжением.Эту энергию можно рассматривать как потерянную энергию, поскольку она не используется для выполнения полезной работы. Цепи коррекции коэффициента мощности используются для минимизации реактивной мощности и повышения эффективности, с которой индуктивные нагрузки потребляют мощность переменного тока. Конденсаторы являются важными компонентами в схемах компенсации коэффициента мощности, и в этой статье будут рассмотрены некоторые конструктивные особенности при использовании этих компонентов для коррекции коэффициента мощности.
Реактивная мощность в индуктивных нагрузках
Индуктивные нагрузки, такие как дроссели, двигатели, оборудование для индукционного нагрева, генераторы, трансформаторы и оборудование для дуговой сварки, создают электрическую задержку, которую обычно называют индуктивностью.Эта индуктивность вызывает разность фаз между током и напряжением. На рис. 1 показаны кривые тока и напряжения для нагрузки с нулевым запаздыванием (чисто резистивная нагрузка).
Рисунок 1 Напряжение и ток для идеальной нагрузки
Из-за фазового сдвига из-за индуктивности бывают моменты, когда ток и напряжение имеют разные знаки. В это время генерируется отрицательная энергия, которая возвращается в сеть электроснабжения. Когда два возвращают одинаковый знак, для генерации магнитных полей требуется аналогичное количество энергии.Энергия, которая теряется из-за перемагничивания в индуктивных нагрузках, обычно называется реактивной мощностью.
Индуктивные нагрузки переменного тока в целом подразделяются на линейные и нелинейные устройства. Для линейных нагрузок форма сигнала тока и форма сигнала напряжения имеют совпадающие синусоидальные профили. На рис. 2 показаны кривые тока и напряжения для типичной линейной нагрузки. С другой стороны, поскольку нелинейные нагрузки потребляют ток на разных частотах, формы сигналов тока и напряжения различаются.Для большинства нелинейных нагрузок форма сигнала тока обычно несинусоидальная. На рис. 3 показаны кривые тока и напряжения для нелинейной нагрузки.
Рисунок 2 Напряжение и ток для линейной нагрузки
Рисунок 3 Напряжение и ток для нелинейной нагрузки
Некоторые примеры линейных электрических нагрузок включают нагревательное оборудование, двигатели и лампы накаливания. К нелинейным устройствам относятся частотно-регулируемые приводы, приводы постоянного тока, программируемые контроллеры, осветительные устройства дугового типа, индукционные печи, источники бесперебойного питания и персональные компьютеры.Известно, что нелинейные электрические нагрузки являются основной причиной гармонических искажений в системах распределения электроэнергии.
Коэффициент мощности
Эффективность, с которой электрические устройства или установки потребляют мощность переменного тока, различается. Некоторые нагрузки используют энергию эффективно, в то время как другие тратят значительную часть потребляемой мощности. Коэффициент мощности используется для описания эффективности, с которой нагрузки потребляют мощность переменного тока. Эта безразмерная величина находится в диапазоне от 0 до 1.
Как показано на рисунке Рисунок 4 и Рисунок 5 , общая мощность переменного тока, также известная как полная мощность, потребляемая электрическим устройством или оборудованием, зависит от двух компонентов: полезной мощности (активной мощности) и реактивной мощности. Под полезной мощностью понимается мощность, необходимая устройству для выполнения задачи. С другой стороны, реактивная мощность не дает полезной работы. Полезная мощность обычно измеряется в кВт, а реактивная мощность – в кВАр.
Рисунок 4 и 5, активная и реактивная мощности диаграммы полной полной мощности
Как показано в уравнении 1 , коэффициент мощности равен отношению активной мощности (полезной мощности) к полной мощности (полной мощности), потребляемой электрическим устройством или оборудованием.Математически можно показать, что коэффициент мощности равен косинусу угла θ (, уравнение 2, ). Чем ближе это отношение к 1,0, тем выше эффективность устройства или оборудования.
Для идеальной электрической нагрузки коэффициент мощности равен 1,0 (единичный коэффициент мощности). Это означает, что вся мощность, потребляемая нагрузкой, используется для выполнения полезной работы. Однако реальной электрической нагрузке добиться этого сложно. Импеданс для нагрузки, представленной формулой , рис. 5, , определяется уравнением 3, где XL – индуктивное реактивное сопротивление, которое определяется формулой , уравнением 4, .
Почему электрической нагрузке трудно достичь единичного коэффициента мощности? Большинству электрических нагрузок присущи реактивные свойства, которые затрудняют достижение идеального коэффициента мощности. Чтобы преодолеть это ограничение, в сеть добавляются схемы коррекции коэффициента мощности для компенсации реактивных характеристик нагрузки.
Коррекция (компенсация) коэффициента мощности
Электрические нагрузки с низким коэффициентом мощности потребляют больше энергии, чем необходимо для выполнения задачи.Это может привести к значительным потерям мощности в сети и высоким потерям в трансформаторе. Такое увеличение потребления энергии увеличивает стоимость работающего оборудования или установок. Низкие коэффициенты мощности также вызывают повышенные падения напряжения в распределительной сети. Поставщики электроэнергии обычно наказывают отрасли, коэффициент мощности которых ниже установленного значения.
Поставщики электроэнергии по разным причинам поощряют промышленных потребителей повышать коэффициент мощности. Начнем с того, что повышение коэффициента мощности может помочь значительно сократить расходы на электроэнергию.Во-вторых, высокий коэффициент мощности помогает минимизировать потери КПД в трансформаторах потребителя. В-третьих, добавление системы коррекции коэффициента мощности помогает увеличить эффективную мощность электрической сети потребителя. Наконец, высокий коэффициент мощности способствует увеличению срока службы электрооборудования.
Сеть компенсации коэффициента мощности снижает мощность, потребляемую нагрузкой, тем самым улучшая общий коэффициент мощности. Компенсационная сеть позволяет электрическим нагрузкам достигать хорошего коэффициента мощности, обычно от 0.95 и 0,98. Коэффициент мощности 0,85 и ниже обычно рассматривается коммунальными предприятиями как плохой коэффициент мощности.
Цепи конденсаторной коррекции коэффициента мощности
Существуют различные методы повышения коэффициента мощности нагрузки или установки. Один из часто используемых методов включает добавление в сеть конденсаторов для коррекции коэффициента мощности. На рисунке 6 показана простая схема, состоящая из источника переменного тока и индуктивной нагрузки.
Рисунок 6 и 7 индуктивная нагрузка с конденсатором коррекции коэффициента мощности и без него
Как конденсатор помогает улучшить коэффициент мощности? В цепи переменного тока реверсирование магнитного поля из-за разности фаз между током и напряжением происходит 50 или 60 раз в секунду.Конденсатор помогает улучшить коэффициент мощности, освобождая линию питания от реактивной мощности. Конденсатор достигает этого за счет накопления энергии инверсии магнитного поля.
На рисунке 7 показана индуктивная нагрузка с конденсатором коррекции коэффициента мощности. Рисунок 8 выше иллюстрирует улучшение коэффициента мощности при добавлении конденсатора в схему. Импеданс для цепи с конденсатором компенсации коэффициента мощности определяется уравнением , уравнение 5, , где XC – емкостное реактивное сопротивление, которое определяется уравнением , уравнением 6, .
В большинстве отраслей для компенсации реактивной мощности устанавливается система конденсаторов, управляемая контроллером коррекции коэффициента мощности. При проектировании системы коррекции коэффициента мощности важно избегать увеличения емкости сети. Добавление избыточной емкости к цепи может привести к чрезмерной коррекции, как показано на Рис. 9.
Полупроводниковые приборы также широко используются для коррекции коэффициента мощности. Использование полупроводниковых устройств в цепи для улучшения коэффициента мощности обычно называется активной компенсацией.Синхронные машины с перевозбуждением также обычно используются для улучшения коэффициента мощности сети.
Заключение
Индуктивные нагрузки, такие как трансформаторы, генераторы, двигатели, дроссели и оборудование для дуговой сварки, создают электрическую задержку, в результате чего ток и напряжение имеют разные знаки. Энергия, необходимая для поддержания разворота магнитного поля в индуктивных нагрузках, называется реактивной мощностью. Снижение реактивной мощности за счет повышения коэффициента мощности нагрузки переменного тока помогает минимизировать общие затраты на работу индуктивных нагрузок.Конденсаторы обычно используются в промышленности для повышения коэффициента мощности и минимизации потерь энергии.
предоставленное изображение: Hydra
оригинальная статья, которая впервые появилась на Capacitor Faks здесь, была отредактирована по объему и содержанию EPCI
IRJET-Запрошенная вами страница не найдена на нашем сайте.
IRJET приглашает статьи из различных инженерных и технологических дисциплин, научных дисциплин для Тома 8, выпуск 5 (май 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 5, Май 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
IRJET приглашает исследователей различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 5 (май 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 5, май 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
IRJET приглашает исследователей различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 5 (май 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 5, май 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
IRJET приглашает исследователей различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 5 (май 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 5, май 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
IRJET приглашает исследователей различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 5 (май 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 5, май 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
IRJET приглашает исследователей различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 5 (май 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 5, май 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
IRJET приглашает исследователей различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 5 (май 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 5, май 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
IRJET приглашает исследователей различных инженерных и технологических и научных дисциплин для Тома 8, выпуск 5 (май 2021 г.)
Отправить сейчас
IRJET Vol-8, выпуск 5, май 2021 г. Публикация продолжается…
Обзор статей
IRJET получил «Импакт-фактор научного журнала: 7,529» за 2020 год.
Проверить здесь
IRJET получил сертификат регистрации ISO 9001: 2008 для своей системы управления качеством.
Методы компенсации реактивной мощности в силовой электронике
Определение : Компенсация реактивной мощности схемы очень важна, поскольку она связана со значением коэффициента мощности.Компенсация реактивной мощности соответствует управлению реактивной мощностью для увеличения рабочих характеристик системы переменного тока. Есть несколько методов, с помощью которых можно улучшить коэффициент мощности системы, и поэтому они рассматриваются как методы компенсации реактивной мощности.
На практике говорят, что значение коэффициента мощности нагрузки должно быть близко к единице, поскольку это значение экономически целесообразно.
Поскольку здесь мы имеем дело с методами компенсации реактивной мощности, давайте сначала вкратце разберемся, что такое реактивная мощность?
Реактивная мощность определяется как количество энергии, которое остается неиспользованным и генерируется в цепи или системе переменного тока реактивными компонентами.Иногда это называют мнимой степенью . Реактивная схема возвращает количество энергии к источнику, которое она потребила, поэтому средняя потребляемая мощность схемы будет равна нулю. Причина этого в том, что одинаковое количество энергии течет от источника к нагрузке туда и обратно.
Реактивная мощность считается основной частью общей мощности цепи.
Он выражается в единице, называемой вольт-ампер, реактивной (VAr) с символом « Q » и является произведением вольт и ампер, которые находятся в противофазе друг относительно друга.
Необходимость компенсации реактивной мощности
Мы недавно обсуждали, что существует возвратно-поступательное движение реактивной мощности от источника питания к реактору таким образом, что в первой четверти цикла сигнала переменного тока конденсатор сохраняет мощность, а во второй четверти цикла – запасенная мощность. возвращается к источнику переменного тока. Это движение реактивной мощности между источником и нагрузкой туда и обратно должно контролироваться.
Также нагрузки в промышленном оборудовании, таком как асинхронные двигатели, индукционные печи, дуги и т. Д.это те, которые работают с низким коэффициентом мощности, в то время как люминесцентные лампы, вентиляторы и т. д., которые работают с низким коэффициентом мощности, требуют довольно большого количества реактивной мощности, следовательно, уровень напряжения на клеммах нагрузки снижается. Однако такое низкое напряжение на клеммах нагрузки нежелательно, так как это приведет к снижению производительности их сетевых устройств.
По этой причине коэффициент мощности системы обязательно должен быть улучшен с помощью определенных методов.
Благодаря компенсации реактивной мощности эффективность передачи увеличивается.Наряду с этим можно регулировать установившиеся и временные перенапряжения, что позволяет избежать катастрофических отключений.
Компенсация реактивной мощности
Низкое значение коэффициента мощности требует большой реактивной мощности, что влияет на уровень напряжения. Следовательно, чтобы компенсировать реактивную мощность, необходимо улучшить коэффициент мощности системы.
Таким образом, методы компенсации реактивной мощности – это не что иное, как методы, с помощью которых можно улучшить низкие коэффициенты мощности.Методы следующие:
- Использование конденсаторных батарей
- Использование синхронных конденсаторов
- Использование статических компенсаторов VAr
Давайте теперь обсудим каждую в отдельности.
1. Конденсаторные батареи: В этом методе батарея конденсаторов образует соединение через нагрузку. Поскольку мы знаем, что конденсатор принимает на себя ведущую реактивную мощность, это приводит к снижению мощности, потребляемой от источника. Это в результате улучшает значение коэффициента мощности системы.Это дополнительно классифицируется как последовательная и шунтовая компенсация.
Предположим, у нас есть схема, показанная здесь,
Как мы уже обсуждали в самом начале, значение коэффициента мощности должно быть равно единице, таким образом, чтобы достичь этого, здесь конденсатор на клеммах двигателя должен быть изменен в соответствии с изменением нагрузки асинхронного двигателя. Это известно как динамическое регулирование коэффициента мощности , поскольку компенсация реактивной мощности выполняется путем включения или выключения конденсаторов при любых условиях нагрузки.
Для непрерывного контроля коэффициента мощности в системе требуются различные конденсаторы малой мощности. Раньше включение и выключение конденсатора выполнялось механическими переключателями, но теперь используются тиристоры, которые помогают регулировать поток реактивной мощности и контролировать напряжение реактивной мощности за счет быстрого переключения статических конденсаторов.
2. Синхронные конденсаторы : Возбуждение синхронного двигателя выше фиксированного уровня заставляет его работать как синхронный конденсатор или конденсатор.Он предназначен для обеспечения динамической коррекции коэффициентов мощности в диапазоне его возбуждения. Первоначально, когда синхронный двигатель находится в состоянии недостаточного возбуждения, он работает как отстающий коэффициент мощности, таким образом, поглощается реактивная мощность. В условиях перевозбуждения ведущий коэффициент мощности вступает в действие и начинает вырабатывать реактивную мощность, таким образом, действует как конденсатор.
Недавно мы обсуждали батарею статических конденсаторов, где мы увидели, что она предлагает дискретное управление коэффициентом мощности, в то время как в случае синхронного конденсатора повышение коэффициента мощности и поток реактивной мощности имеют непрерывный характер.
Однако потери в синхронных конденсаторах сравнительно больше, чем в конденсаторной батарее. Наряду с этим он предлагает установку оборудования в одном фиксированном месте, в то время как конденсаторная батарея предлагает распределенную установку. Это увеличивает эффективность синхронного конденсатора. Время отклика синхронного конденсатора сравнительно больше, чем у конденсаторной батареи.
3. Статические компенсаторы VAr: В высоковольтной системе питания используется статический компенсатор VAr.Он сокращенно SVC и демонстрирует повышенную стабильность системы, снижение потерь в линии, поддержание отклонений в определенных пределах. Он имеет шунтирующие реакторы и шунтирующие конденсаторы. Шунтирующие реакторы и реакторы с тиристорным управлением используются для ограничения роста напряжения при отсутствии нагрузки или в условиях низкой нагрузки, в то время как статические конденсаторы и конденсаторы с тиристорной коммутацией используются для предотвращения падения напряжения в условиях пиковой нагрузки.
Он может быть сформирован двумя способами: один с параллельной комбинацией реактора с тиристорным управлением и конденсатора постоянной емкости, а другой – с параллельной комбинацией конденсатора с тиристорным управлением и реактора с тиристорным управлением.
SVC предназначен как для выработки, так и для поглощения реактивной мощности.
Компенсация реактивной мощности на основе пассивных компонентов в несинусоидальной многолинейной системе
Lyon WV (1920) Реактивная мощность и несимметричные цепи. Электрический мир 75 (25): 1417–1420
Google Scholar
Fryze S (1932) Активная, реактивная и полная мощность в цепи с синусоидальным напряжением и током. Electrotechnische Zeitschrift 53 (25): 596–599
Google Scholar
Miller TJE (1982) Управление реактивной мощностью в электрических системах. Уайли, Нью-Йорк
Google Scholar
Enslin JHR, van Wyk JD (1988) Измерение и компенсация фиктивной мощности в условиях несинусоидального напряжения и тока. IEEE Trans Instr Meas 37 (3): 403–408
Статья Google Scholar
Depenbrock M (1993) FBD-метод, широко применяемый инструмент для анализа властных отношений.IEEE Trans Power Systems 8 (2): 381–387
Статья Google Scholar
Mayordomo JG, Usaola J (1993) Определения полной мощности и коэффициента мощности для многофазных нелинейных нагрузок, когда питающие проводники имеют разное сопротивление. Eur Trans Electr Power 3 (6): 415–420
Статья Google Scholar
Sasdelli R, Montanari GC (1994) Компенсируемая мощность для электрических систем в несинусоидальных условиях.IEEE Trans Instr Meas 43 (4): 592–598
Статья Google Scholar
Superti Furga G (1994) Поиск обобщения реактивной мощности – предложение. Eur Trans Electr Power 4 (5): 411–420
Статья Google Scholar
Ferrero A (1998) Определения электрических величин, обычно используемых в несинусоидальных условиях. Eur Trans Electr Power 8 (4): 235–240
Статья Google Scholar
Сингх Б., Аль-Хаддад К., Чандра А. (1999) Обзор активных фильтров для улучшения качества электроэнергии. IEEE Trans Ind Electron 46 (5): 960–971
Статья Google Scholar
Эррера Р.С., Сальмерон П., Ким Х. (2008) Теория мгновенной реактивной мощности, примененная к компенсации фильтра активной мощности: различные подходы, оценка и экспериментальные результаты. IEEE Trans Ind Electron 55 (1): 184–196
Статья Google Scholar
Сингх Б., Джаяпракаш П., Котари Д. П. (2015) Всестороннее исследование конфигураций DSTATCOM. IEEE Trans Indus Inform 10 (2): 854–870
Статья Google Scholar
Ван Х., Лю С. (2019) Оптимальная стратегия работы для фильтра активной мощности с использованием каскадных H-мостов при соединении треугольником. Электроэнергетическая система Res 1 (175): 1–12
Google Scholar
Shepherd W, Zakikhani P (1972) Предлагаемое определение реактивной мощности для несинусоидальных систем.IEE Proc 119 (9): 1361–1362
Google Scholar
Шарон Д. (1973) Определение реактивной мощности и улучшение коэффициента мощности в нелинейных системах. IEE Proc 120 (6): 704–706
Google Scholar
Кустер Н.Л., Мур WJM (1980) Об определении реактивной мощности в несинусоидальных условиях. IEEE Trans Power Appar Syst 99 (5): 1845–1854
Статья Google Scholar
Азиз MMA, Эль-Захаб EEA, Ибрагим AM, Зобаа А.Ф. (2004) Компенсатор LC для коррекции коэффициента мощности нелинейных нагрузок. IEEE Trans Power Deliv 19 (1): 331–335
Статья Google Scholar
Sharon D (1996) Определения коэффициента мощности и качество передачи энергии в несинусоидальных ситуациях. IEEE Trans Instr Meas 45 (3): 728–733
Статья Google Scholar
Чарнецкий Л.С. (1997) Минимизация реактивной мощности в несинусоидальных условиях. IEEE Trans Instr Meas 36 (1): 18–22
Статья Google Scholar
Диван С.П., Инамдар Х.П., Вайдья А.П. (2011) Исследования моделирования шунтирующих пассивных фильтров гармоник: улучшение коэффициента мощности нагрузки шестипульсного выпрямителя и контроль гармоник. Int J Electr Power Eng 2 (1): 1–6
Google Scholar
Jeon S-J (2017) Пассивный последовательно-параллельный компенсатор для несинусоидальной системы питания. RE & PQJ 1 (15): 933–938
Статья Google Scholar
Хорди О., Сайнс Л., Чиндрис М. (2002) Проектирование системы Steinmetz в несбалансированных условиях. Eur Trans Electr Power 12 (4): 283–290
Статья Google Scholar
Jeon S-J, Willems JL (2011) Компенсация реактивной мощности в многолинейной системе в условиях синусоидальной несимметрии.Int J Circ Theor Appl 39 (3): 211–224
Статья Google Scholar
Чарнецкий Л.С. (2015) Несбалансированная мощность в четырехпроводных системах и ее компенсация реактивной мощности. IEEE Trans Power Deliv 30 (1): 53–63
MathSciNet Статья Google Scholar
Панэ А., Бэлой А., Мольнар-Матей Ф. (2020) Новый метод расчета сопротивлений балансирующего емкостного компенсатора для трехфазной четырехпроводной распределительной сети.Electr Power Energy Syst 115: 1–16
Статья Google Scholar
LaWhite N, Ilic MD (1997) Разложение реактивной мощности в векторном пространстве для периодических несинусоидальных сигналов. IEEE Trans Circuits Syst 44 (4): 338–346
Статья Google Scholar
Jeon S-J (2005) Определения полной мощности и коэффициента мощности в энергосистеме, имеющей линии передачи с разными сопротивлениями.IEEE Trans Power Deliv 20 (3): 1806–1811
MathSciNet Статья Google Scholar
Spath H (2007) Общее определение активного тока и неактивной мощности на основе немецкого стандарта DIN 40110. Electr Eng 89 (3): 167–175
Article Google Scholar
Jeon S-J (2006) Соображения относительно концепции реактивной мощности в многолинейной системе.IEEE Trans Power Deliv 21 (2): 551–559
Статья Google Scholar
Виллемс Дж. Л. (1993) Компенсация тока в трехфазной энергосистеме. Eur Trans Electr Power 3 (1): 61–66
MathSciNet Статья Google Scholar
Lsee S-Y, Wu C-J (1993) Схемы компенсации реактивной мощности в режиме онлайн для несимметричных трехфазных четырехпроводных распределительных фидеров.IEEE Trans Power Deliv 8 (4): 1958–1965
Статья Google Scholar
