
РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ С РЕВЕРСОМ
Всем привет, наверно многие радиолюбители, также как и я, имеют не одно хобби, а несколько. Помимо конструирования электронных устройств занимаюсь фотографией, съемкой видео на DSLR камеру, и видео монтажом. Мне, как видеографу, был необходим слайдер для видео съемки, и для начала вкратце объясню, что это такое. Ниже на фото показан фабричный слайдер.
Слайдер предназначен для видеосъемки на фотоаппараты и видеокамеры. Он являются аналогом рельсовой системы, которая используется в широкоформатном кино. С его помощью создается плавное перемещение камеры вокруг снимаемого объекта. Другим очень сильным эффектом, который можно использовать при работе со слайдером, – это возможность приблизиться или удалиться от объекта съемки. На следующем фото изображен двигатель, который выбрал для изготовления слайдера.
В качестве привода слайдера используется двигатель постоянного тока с питанием 12 вольт. В интернете была найдена схема регулятора для двигателя, который перемещает каретку слайдера.
При работе такого устройства важно, чтоб была плавная регулировка скорости, плюс легкое включение реверса двигателя. Скорость вращения вала двигателя, в случае применения нашего регулятора, плавно регулируется вращением ручки переменного резистора на 5 кОм. Возможно, не только я один из пользователей этого сайта увлекаюсь фотографией, и кто-то ещё захочет повторить это устройство, желающие могут скачать в конце статьи архив со схемой и печатной платой регулятора. На следующем рисунке приведена принципиальная схема регулятора для двигателя:
Схема регулятора
Схема очень простая и может быть легко собрана даже начинающими радиолюбителями. Из плюсов сборки этого устройства могу назвать его низкую себестоимость и возможность подогнать под нужные потребности. На рисунке приведена печатная плата регулятора:
Но область применения данного регулятора не ограничивается одними слайдерами, его легко можно применить в качестве регулятора оборотов, например бор машинки, самодельного дремеля, с питанием от 12 вольт, либо компьютерного кулера, например, размерами 80 х 80 или 120 х 120 мм.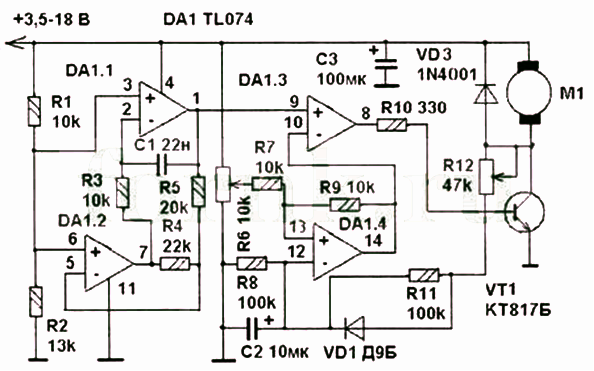 Также мною была разработана схема реверса двигателя, или говоря другими словами, быстрой смены вращения вала в другую сторону. Для этого использовал шестиконтактный тумблер на 2 положения. На следующем рисунке изображена схема его подключения:
Также мною была разработана схема реверса двигателя, или говоря другими словами, быстрой смены вращения вала в другую сторону. Для этого использовал шестиконтактный тумблер на 2 положения. На следующем рисунке изображена схема его подключения:
Средние контакты тумблера, обозначенные (+) и (-) подключают к контактам на плате обозначенным М1.1 и М1.2, полярность не имеет значения. Всем известно, что компьютерные кулеры, при снижении напряжения питания и, соответственно, оборотов, издают в работе намного меньший шум. На следующем фото, транзистор КТ805АМ на радиаторе:
В схеме можно использовать почти любой транзистор средней и большой мощности n-p-n структуры. Диод также можно заменить на подходящие по току аналоги, например 1N4001, 1N4007 и другие. Выводы двигателя зашунтированы диодом в обратном включении, это было сделано для защиты транзистора в моменты включения – отключения схемы, так как двигатель у нас нагрузка индуктивная. Также, в схеме предусмотрена индикация включения слайдера на светодиоде, включенном последовательно с резистором.
При использовании двигателя большей мощности, чем изображен на фото, транзистор для улучшения охлаждения нужно прикрепить к радиатору. Фото получившейся платы приведено ниже:
Плата регулятора была изготовлена методом ЛУТ. Увидеть, что получилось в итоге, можно на видеоролике.
Видео работы
В скором времени, как будут приобретены недостающие части, в основном механика, приступлю к сборке устройства в корпусе. Статью прислал Алексей Cитков.
Форум
Форум по обсуждению материала РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ С РЕВЕРСОМ
устройство и изготовление своими руками. Как сделать самодельный регулятор оборотов двигателя
При использовании электродвигателя в различных устройствах и инструментах неизменно возникает необходимость регулировки скорости вращения вала.
Самостоятельно сделать регулятор оборотов электродвигателя не составит труда.![]() Нужно лишь подыскать качественную схему, устройство которой полностью бы подходило к особенностям и типу конкретного электрического двигателя.
Нужно лишь подыскать качественную схему, устройство которой полностью бы подходило к особенностям и типу конкретного электрического двигателя.
Использование частотных преобразователей
Для регулировки оборотов электрического двигателя, работающего от сети с напряжением в 220 и 380 Вольт, могут использоваться частотные преобразователи. Высокотехнологичные электронные устройства позволяют благодаря изменению частоты и амплитуды сигнала плавно регулировать частоту вращения электродвигателя.
В основе таких преобразователей лежат мощные полупроводниковые транзисторы с широкоимпульсными модуляторами.
Преобразователи с помощью соответствующего блока управления на микроконтроллере позволяют плавно изменять показатель оборотов двигателя.
Высокотехнологичные преобразователи частоты используются в сложных и нагруженных механизмах. Современные частотные регуляторы имеют сразу несколько степеней защиты , в том числе по нагрузке, показателю тока напряжения и другим характеристикам.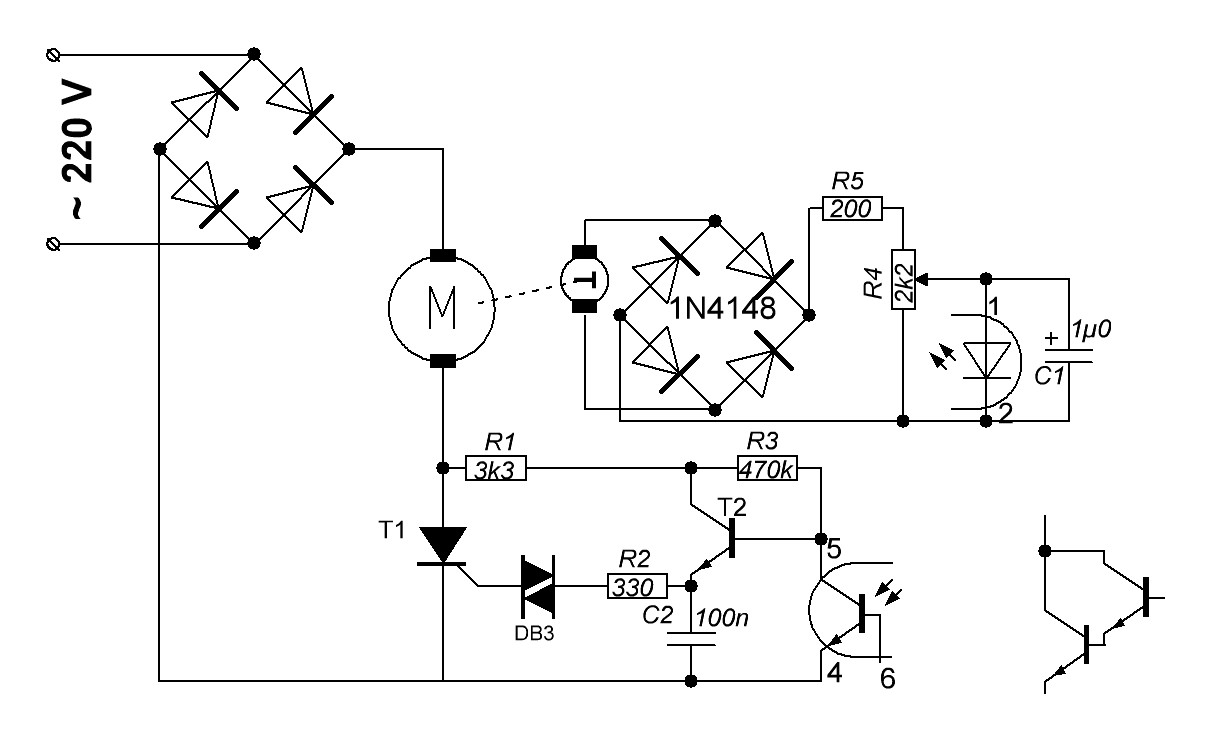
Применение электронных регуляторов
Использование мощных асинхронных двигателей невозможно без применения соответствующих регуляторов оборотов. Такие преобразователи используются для следующих целей:
Используемая частотными преобразователями схема работы аналогична у большинства бытовых приборов. Похожие устройства также используются в сварочных аппаратах, ИБП, питании ПК и ноутбуков, стабилизаторах напряжения, блоках розжига ламп, а также в мониторах и жидкокристаллических телевизорах.
Несмотря на кажущуюся сложность схемы, сделать регулятор оборотов электродвигателя 220 В будет достаточно просто.
Принцип работы устройства
Принцип работы и конструкция регулятора оборотов двигателя отличается простотой, поэтому, изучив технические моменты, вполне по силам выполнить их самостоятельно.
Отличием асинхронных двигателей от стандартных приводов является вращение ротора с максимальными показателями мощности при подаче напряжения на обмотку трансформатора. На начальном этапе показатели потребляемого тока и мощность у двигателя возрастает до максимума, что приводит к существенной нагрузке на привод и его быстрому выходу из строя.
При запуске двигателя на максимальных оборотах выделяется большое количество тепла, что приводит к перегреву привода, обмотки и других элементов привода. Благодаря использованию частотного преобразователя имеется возможность плавно разгонять двигатель, что предупреждает перегрев и другие проблемы с агрегатом. Электромотор может при использовании частотного преобразователя запускаться на частоте оборотов 1000 в минуту, а в последующем обеспечивается плавный разгон, когда каждые 10 секунд прибавляется 100−200 оборотов двигателя.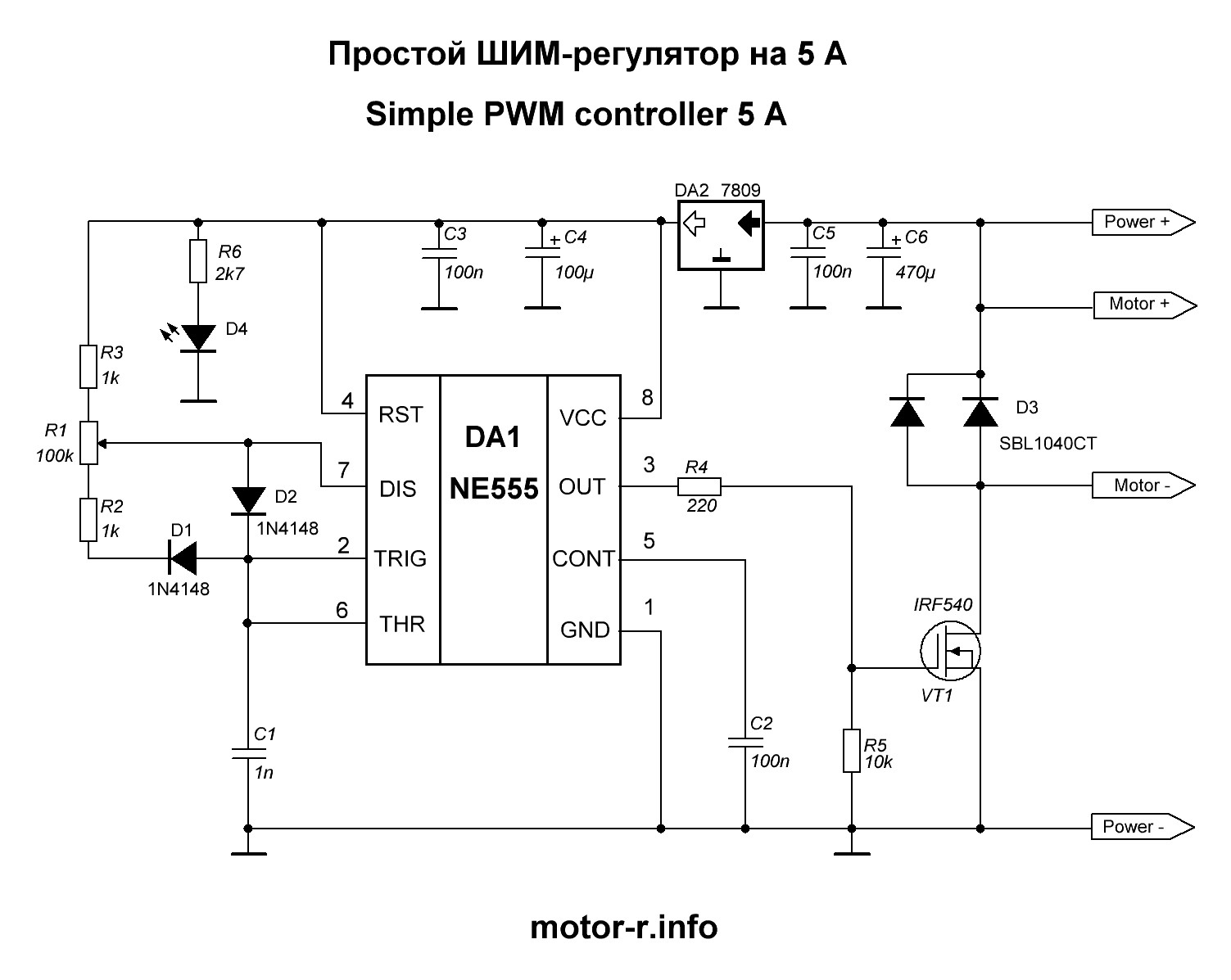
Изготовление самодельных реле
Изготовить самодельный регулятор оборотов электродвигателя 12 В не составит какого-либо труда. Для такой работы потребуется следующее:
- Проволочные резисторы.
- Переключатель на несколько положений.
- Блок управления и реле.
Использование проволочных резисторов позволяет изменять напряжение питания, соответственно, и частоту вращения двигателя. Такой регулятор обеспечивает ступенчатый разгон двигателя, отличается простой конструкции и может быть выполнен даже начинающими радиолюбителями. Такие простейшие самодельные ступенчатые регуляторы можно использовать с асинхронными и контактными двигателями.
Принцип работы самодельного преобразователя:
В прошлом наибольшей популярностью пользовались механические регуляторы, выполненные на основе вариатора или шестеренчатого привода. Однако они не отличались должной надежностью и часто выходили из строя.
Самодельные электронные регуляторы зарекомендовали себя с наилучшей стороны. Они используют принцип изменения ступенчатого или плавного напряжения, отличаются долговечностью, надежностью, имеют компактные габариты и обеспечивают возможность тонкой настройки работы привода.
Они используют принцип изменения ступенчатого или плавного напряжения, отличаются долговечностью, надежностью, имеют компактные габариты и обеспечивают возможность тонкой настройки работы привода.
Дополнительное использование в схемах электронных регуляторов симисторов и аналогичных устройств позволяет обеспечить плавное изменение мощности напряжения, соответственно электродвигатель будет правильно набирать обороты, постепенно выходя на свою максимальную мощность.
Для обеспечения качественной регулировки в схему включаются переменные резисторы, которые изменяют амплитуду входящего сигнала, обеспечивая плавное или ступенчатое изменение числа оборотов.
Схема на ШИМ-транзисторе
Регулировать скорость вращения вала у маломощных электродвигателей можно при помощи шин-транзистора и последовательного соединения резисторов в питании. Этот вариант отличается простотой реализации, однако имеет низкий КПД и не позволяет плавно изменять скорость вращения двигателя. Изготовить своими руками регулятор оборотов коллекторного двигателя 220 В с использованием шим-транзистора не составит особой сложности.
Изготовить своими руками регулятор оборотов коллекторного двигателя 220 В с использованием шим-транзистора не составит особой сложности.
Принцип работы регулятора на транзисторе:
- Используемые сегодня шин-транзисторы имеют генератор пилообразного напряжения частотой в 150 Герц.
- Операционные усилители используются в роли компаратора.
- Изменение скорости вращения осуществляется за счёт наличия переменного резистора, управляющего длительностью импульсов.
Транзисторы имеют ровную постоянную амплитуду импульсов, идентичную амплитуде напряжения питания. Это позволяет выполнять регулировку оборотов двигателя 220 В и поддерживать работу агрегата даже при подаче минимального напряжения на обмотку трансформатора.
Благодаря возможности подключения микроконтроллера к ШИМ-транзистору обеспечивается возможность автоматической настройки и регулировки работы электропривода. Такие схемы исполнения преобразователей могут иметь дополнительные компоненты, которые расширяют функциональные возможности привода, обеспечивая работу в полностью автоматическом режиме.
Внедрение автоматических систем управления
Наличие в регуляторах и частотных преобразователях микроконтроллерного управления позволяет улучшить параметры работы привода, а сам мотор может работать в полностью автоматическом режиме, когда используемый контроллер плавно или ступенчато изменяет показатели частоты вращения агрегата. Сегодня в качестве микроконтроллерного управления используются процессоры, которые имеют отличающееся число выходов и входов. К такому микроконтроллеру можно подключить различные электронные ключи, кнопки, всевозможные датчики потери сигнала и так далее.
В продаже можно найти различные типы микроконтроллеров , которые отличаются простотой в использовании, гарантируют качественную настройку работы преобразователя и регулятора, а наличие дополнительных входов и выходов позволяет подключать к процессору различные дополнительные датчики, по сигналу которых устройство будет уменьшать или увеличивать число оборотов или же полностью прекращать подачу напряжения на обмотки электродвигателя.
Сегодня в продаже имеются различные преобразователи и регуляторы электродвигателя. Впрочем, при наличии даже минимальных навыков работы с радиодеталями и умении читать схемы можно выполнить такое простейшее устройство, которое будет плавно или ступенчато изменять обороты двигателя. Дополнительно можно включить в цепь управляющий симисторный реостат и резистор, что позволит плавно изменять обороты, а наличие микроконтроллерного управления полностью автоматизирует использование электрических двигателей.
Схема регулятора основанного на широтно-импульсной модуляции или просто , может быть использована для изменения оборотов двигателя постоянного тока на 12 вольт. Регулирование частоты вращения вала при помощи ШИМ дает большую производительность, чем при использовании простого изменения постоянного напряжения подаваемого на двигатель.
Шим регулятор оборотов двигателя
Двигатель подключен к полевому транзистору VT1, который управляется ШИМ мультивибратором, построенным на популярном таймере NE555. Из-за применения схема регулирования оборотов получилась достаточно простой.
Из-за применения схема регулирования оборотов получилась достаточно простой.
Как уже было сказано выше, шим регулятор оборотов двигателя выполнен с помощью простого генератора импульсов вырабатываемого нестабильным мультивибратором с частотой 50 Гц выполненного на таймере NE555. Сигналы с выхода мультивибратора обеспечивают смещение на затворе MOSFET транзистора.
Длительность положительного импульса можно регулировать переменным резистором R2. Чем больше ширина положительного импульса поступающего на затвор MOSFET транзистора, тем больше мощность поступает на двигатель постоянного тока. И наоборот чем уже ширина его, тем меньше мощности передается и как следствие понижаются обороты двигателя . Данная схема может работать от источника питания в 12 вольт.
Характеристики транзистора VT1 (BUZ11):
- Тип транзистора: MOSFET
- Полярность: N
- Максимальная рассеиваемая мощность (Вт): 75
- Предельно допустимое напряжение сток-исток (В): 50
- Предельно допустимое напряжение затвор-исток (В): 20
- Максимально допустимый постоянный ток стока (А): 30
На простых механизмах удобно устанавливать аналоговые регуляторы тока. К примеру, они могут изменить скорость вращения вала мотора. С технической стороны выполнить такой регулятор просто (потребуется установка одного транзистора). Применим для регулировки независимой скорости моторов в робототехнике и источниках питания. Наиболее распространены два варианта регуляторов: одноканальные и двухканальные.
К примеру, они могут изменить скорость вращения вала мотора. С технической стороны выполнить такой регулятор просто (потребуется установка одного транзистора). Применим для регулировки независимой скорости моторов в робототехнике и источниках питания. Наиболее распространены два варианта регуляторов: одноканальные и двухканальные.
Видео №1 . Одноканальный регулятор в работе. Меняет скорость кручения вала мотора посредством вращения ручки переменного резистора.
Видео №2. Увеличение скорости кручения вала мотора при работе одноканального регулятора. Рост числа оборотов от минимального до максимального значения при вращении ручки переменного резистора.
Видео №3 . Двухканальный регулятор в работе. Независимая установка скорости кручения валов моторов на базе подстроечных резисторов.
Видео №4.
Напряжение на выходе регулятора измерено цифровым мультиметром. Полученное значение равно напряжению батарейки, от которого отняли 0,6 вольт (разница возникает из-за падения напряжения на переходе транзистора).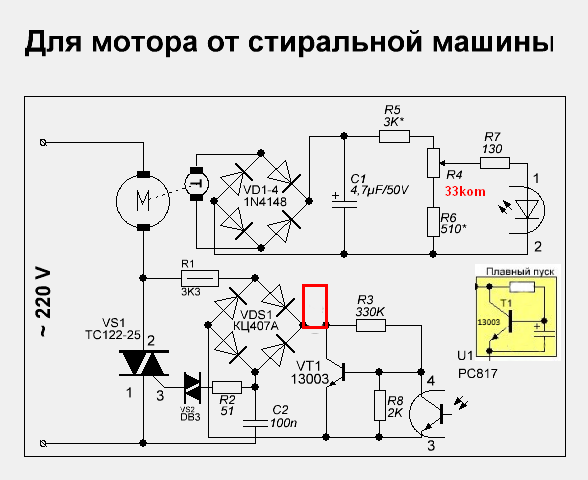 При использовании батарейки в 9,55 вольт, фиксируется изменение от 0 до 8,9 вольт.
При использовании батарейки в 9,55 вольт, фиксируется изменение от 0 до 8,9 вольт.
Функции и основные характеристики
Ток нагрузки одноканального (фото. 1) и двухканального (фото. 2) регуляторов не превышает 1,5 А. Поэтому для повышения нагрузочной способности производят замену транзистора КТ815А на КТ972А. Нумерация выводов для этих транзисторов совпадает (э-к-б). Но модель КТ972А работоспособна с токами до 4А.
Одноканальный регулятор для мотора
Устройство управляет одним мотором, питание осуществляется от напряжения в диапазоне от 2 до 12 вольт.
Конструкция устройства
Основные элементы конструкции регулятора представлены на фото. 3. Устройство состоит из пяти компонентов: два резистор переменного сопротивления с сопротивлением 10 кОм (№1) и 1 кОм (№2), транзистор модели КТ815А (№3), пара двухсекционных винтовых клеммника на выход для подключения мотора (№4) и вход для подключения батарейки (№5).
Примечание 1.
Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Принцип работы
Порядок работы регулятора мотора описывает электросхема (рис. 1). С учетом полярности на разъем ХТ1 подают постоянное напряжение. Лампочку или мотор подключают к разъему ХТ2. На входе включают переменный резистор R1, вращение его ручки изменяет потенциал на среднем выходе в противовес минусу батарейки. Через токоограничитель R2 произведено подключение среднего выхода к базовому выводу транзистора VT1. При этом транзистор включен по схеме регулярного тока. Положительный потенциал на базовом выходе увеличивается при перемещении вверх среднего вывода от плавного вращения ручки переменного резистора. Происходит увеличение тока, которое обусловлено снижением сопротивления перехода коллектор-эмитттер в транзисторе VT1. Потенциал будет уменьшаться, если ситуация будет обратной.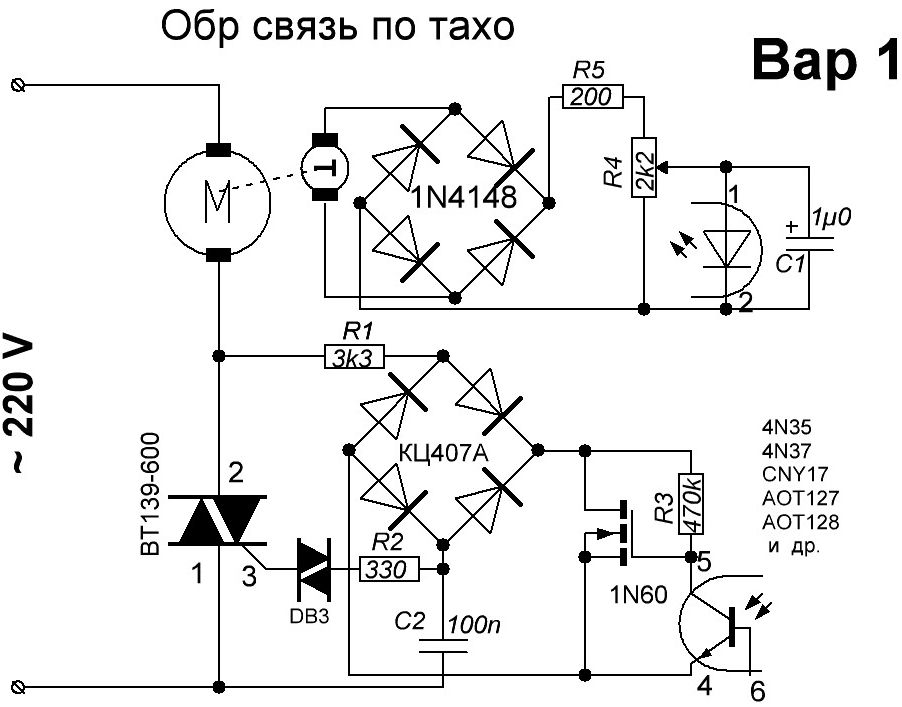
Принципиальная электрическая схема
Материалы и детали
Необходима печатная плата размером 20х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита (допустимая толщина 1-1,5 мм). В таблице 1 приведен список радиокомпонентов.
Примечание 2. Необходимый для устройства переменный резистор может быть любого производства, важно соблюсти для него значения сопротивления тока указанные в таблице 1.
Примечание 3 . Для регулировки токов выше 1,5А транзистор КТ815Г заменяют на более мощный КТ972А (с максимальным током 4А). При этом рисунок печатной платы менять не требуется, так как распределение выводов у обоих транзисторов идентично.
Процесс сборки
Для дальнейшей работы нужно скачать архивный файл, размещенный в конце статьи, разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора (файл ), а монтажный чертеж (файл ) – на белом листе офисной (формат А4).
Далее чертеж монтажной платы (№1 на фото. 4) наклеивают к токоведущим дорожкам на противоположной стороне печатной платы (№2 на фото. 4). Необходимо сделать отверстия (№3 на фото. 14) на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпадать. На фото.5 показана цоколёвка транзистора КТ815.
Вход и выход клеммников-разъемов маркируют белым цветом. Через клипсу к клеммнику подключается источник напряжения. Полностью собранный одноканальный регулятор отображен на фото. Источник питания (батарея 9 вольт) подключается на финальном этапе сборки. Теперь можно регулировать скорость вращения вала с помощью мотора, для этого нужно плавно вращать ручку регулировки переменного резистора.
Для тестирования устройства необходимо из архива распечатать чертеж диска. Далее нужно наклеить этот чертеж (№1) на плотную и тонкую картонную бумагу (№2). Затем с помощью ножниц вырезается диск (№3).
Полученную заготовку переворачивают (№1) и к центру крепят квадрат черной изоленты (№2) для лучшего сцепления поверхности вала мотора с диском.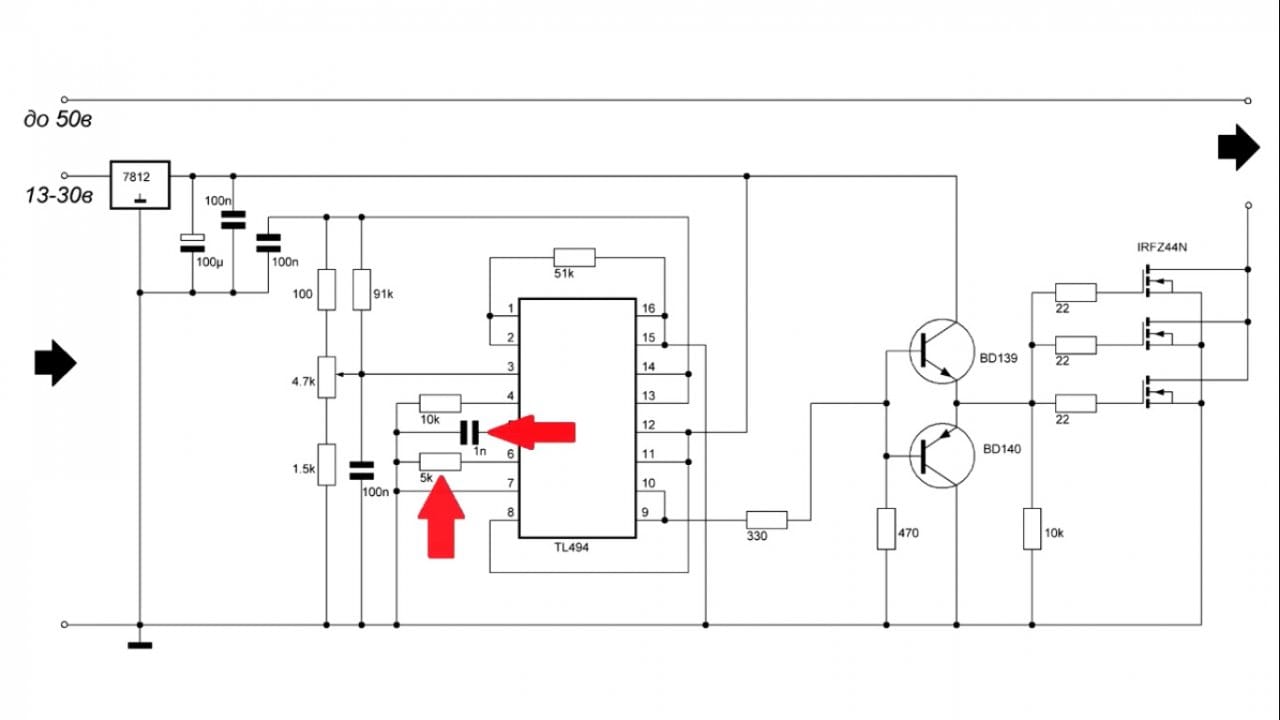 Нужно сделать отверстие (№3) как указано на изображении. Затем диск устанавливают на вал мотора и можно приступать к испытаниям. Одноканальный регулятор мотора готов!
Нужно сделать отверстие (№3) как указано на изображении. Затем диск устанавливают на вал мотора и можно приступать к испытаниям. Одноканальный регулятор мотора готов!
Двухканальный регулятор для мотора
Используется для независимого управления парой моторов одновременно. Питание осуществляется от напряжения в диапазоне от 2 до 12 вольт. Ток нагрузки рассчитан до 1,5А на каждый канал.
Конструкция устройства
Основные компоненты конструкции представлены на фото.10 и включают: два подстроечных резистора для регулировки 2-го канала (№1) и 1-го канала (№2), три двухсекционных винтовых клеммника для выхода на 2-ой мотор (№3), для выхода на 1-ый мотор (№4) и для входа (№5).
Примечание.1 Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Принцип работы
Схема двухканального регулятора идентична электрической схеме одноканального регулятора. Состоит из двух частей (рис.2). Основное отличие: резистор переменного сопротивления замен на подстроечный резистор. Скорость вращения валов устанавливается заранее.
Состоит из двух частей (рис.2). Основное отличие: резистор переменного сопротивления замен на подстроечный резистор. Скорость вращения валов устанавливается заранее.
Примечание.2. Для оперативной регулировки скорости кручения моторов подстроечные резисторы заменяют с помощью монтажного провода с резисторами переменного сопротивления с показателями сопротивлений, указанными на схеме.
Материалы и детали
Понадобится печатная плата размером 30х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита толщиной 1-1,5 мм. В таблице 2 приведен список радиокомпонентов.
Процесс сборки
После скачивания архивного файла, размещенного в конце статьи, нужно разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора для термоперевода (файл termo2), а монтажный чертеж (файл montag2) – на белом листе офисной (формат А4).
Чертеж монтажной платы наклеивают к токоведущим дорожкам на противоположной стороне печатной платы. Формируют отверстия на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпасть. Производится цоколёвка транзистора КТ815. Для проверки нужно временно соединить монтажным проводом входы 1 и 2 .
Формируют отверстия на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпасть. Производится цоколёвка транзистора КТ815. Для проверки нужно временно соединить монтажным проводом входы 1 и 2 .
Любой из входов подключают к полюсу источника питания (в примере показана батарейка 9 вольт). Минус источника питания при этом крепят к центру клеммника. Важно помнить: черный провод «-», а красный «+».
Моторы должны быть подключены к двум клеммникам, также необходимо установить нужную скорость. После успешных испытаний нужно удалить временное соединение входов и установить устройство на модель робота. Двухканальный регулятор мотора готов!
В представленные необходимые схемы и чертежи для работы. Эмиттеры транзисторов помечены красными стрелками.
Схема регулятора оборотов двигателя постоянного тока работает на принципах широтно-импульсной модуляции и применяется для изменения оборотов двигателя постоянного тока на 12 вольт. Регулирование частоты вращения вала двигателя при помощи широтно-импульсной модуляции дает больший КПД, чем при применение простого изменения постоянного напряжения подаваемого на двигатель, хотя эти схемы мы тоже рассмотрим
Регулирование частоты вращения вала двигателя при помощи широтно-импульсной модуляции дает больший КПД, чем при применение простого изменения постоянного напряжения подаваемого на двигатель, хотя эти схемы мы тоже рассмотрим
Регулятор оборотов двигателя постоянного тока схема на 12 вольт
Двигатель подключен в цепь к полевому транзистору который управляется широтно-импульсной модуляцией осуществляемой на микросхеме таймере NE555, поэтому и схема получилась такой простой.
ШИМ регулятор реализован с помощью обычного генератора импульсов на нестабильном мультивибраторе, генерирующий импульсы с частотой следования 50 Гц и построенного на популярном таймере NE555. Сигналы поступающие с мультивибратора создают поле смещения на затворе полевого транзистора. Длительность положительного импульса настраивается при помощи переменного сопротивления R2. Чем выше длительность положительного импульса поступающего на затвор полевого транзистора, тем большая мощность подается на электродвигатель постоянного тока. И на оборот чем меньше длительность импульса, тем слабее вращается электродвигатель. Эта схема прекрасно работает от аккумуляторной батареи на 12 вольт.
И на оборот чем меньше длительность импульса, тем слабее вращается электродвигатель. Эта схема прекрасно работает от аккумуляторной батареи на 12 вольт.
Регулирование оборотов двигателя постоянного тока схема на 6 вольт
Скорость 6 вольтового моторчика можно регулируется в пределах 5-95%
Регулятор оборотов двигателя на PIC-контроллере
Регулировка оборотов в этой схеме достигается подачей на электромотор импульсов напряжения, различной длительности. Для этих целей используются ШИМ (широтно-импульсные модуляторы). В данном случае широтно-импульсное регулирование обеспечивается микроконтроллер PIC. Для управления скоростью вращения двигателя используются две кнопки SB1 и SB2, «Больше» и «Меньше». Изменять скорость вращенияможно только при нажатом тумблере «Пуск». Длительность импульса при этом изменяется, в процентном отношении к периоду, от 30 — 100%.
В качестве стабилизатора напряжения микроконтроллера PIC16F628A, используется трехвыводной стабилизатор КР1158ЕН5В, имеющий низкое падение напряжение «вход-выход», всего около 0,6В. Максимальное входное напряжение – 30В. Все это позволяет применять двигатели с напряжением от 6В до 27В. В роли силового ключа используется составной транзистор КТ829А который желательно установить на радиатор.
Максимальное входное напряжение – 30В. Все это позволяет применять двигатели с напряжением от 6В до 27В. В роли силового ключа используется составной транзистор КТ829А который желательно установить на радиатор.
Устройство собрано на печатной плате размерами 61 х 52мм. Скачать рисунок печатной платы и файл прошивки можно по ссылке выше. (Смотри в архиве папку 027-el )
Эта самодельная схема может быть использована в качестве регулятора скорости для двигателя постоянного тока 12 В с номинальным током до 5 А или как диммер для 12 В галогенных и светодиодных ламп мощностью до 50 Вт. Управление идёт с помощью широтно-импульсной модуляции (ШИМ) при частоте следования импульсов около 200 Гц. Естественно частоту можно при необходимости изменить, подобрав по максимальной стабильности и КПД.
Большинство подобных конструкций собирается по гораздо более простой схеме. Здесь же представляем более усовершенствованный вариант, который использует таймер 7555, драйвер на биполярных транзисторах и мощный полевой MOSFET. Такая схематика обеспечивает улучшенное регулирование скорости и работает в широком диапазоне нагрузки. Это действительно очень эффективная схема и стоимость её деталей при покупке для самостоятельной сборки довольно низкая.
Такая схематика обеспечивает улучшенное регулирование скорости и работает в широком диапазоне нагрузки. Это действительно очень эффективная схема и стоимость её деталей при покупке для самостоятельной сборки довольно низкая.
Схема ШИМ регулятора для мотора 12 В
В схеме используется Таймер 7555 для создания переменной ширины импульсов около 200 Гц. Он управляет транзистором Q3 (через транзисторы Q1 — Q2), который контролирует скорость электро двигателя или ламп освещения.
Есть много применений для этой схемы, которые будут питаться от 12 В: электродвигатели, вентиляторы или лампы. Использовать её можно в автомобилях, лодках и электротранспортных средствах, в моделях железных дорог и так далее.
Светодиодные лампы на 12 В, например LED ленты, тоже можно смело сюда подключать. Все знают, что светодиодные лампы гораздо более эффективны, чем галогенные или накаливания, они прослужит намного дольше. А если надо — питайте ШИМ-контроллер от 24 и более вольт, так как сама микросхема с буферным каскадом имеют стабилизатор питания.
Регулятор скорости двигателя переменного тока
ШИМ контроллер на 12 вольт
Драйвер регулятора постоянного тока полумостовой
Схема регулятора оборотов минидрели
Для плавности увеличения и уменьшения скорости вращения вала существует специальный прибор –регулятор оборотов электродвигателя 220в. Стабильная эксплуатация, отсутствие перебоев напряжения, долгий срок службы – преимущества использования регулятора оборотов двигателя на 220, 12 и 24 вольт.
- Для чего нужен частотный преобразователь оборотов
- Область применения
- Выбираем устройство
- Устройство ПЧ
- Виды устройств
- Процесс пропорциональных сигналов
Функция регулятора в инвертировании напряжения 12, 24 вольт, обеспечение плавности пуска и остановки с использованием широтно-импульсной модуляции.
Контроллеры оборотов входят в структуру многих приборов, так как они обеспечивают точность электрического управления.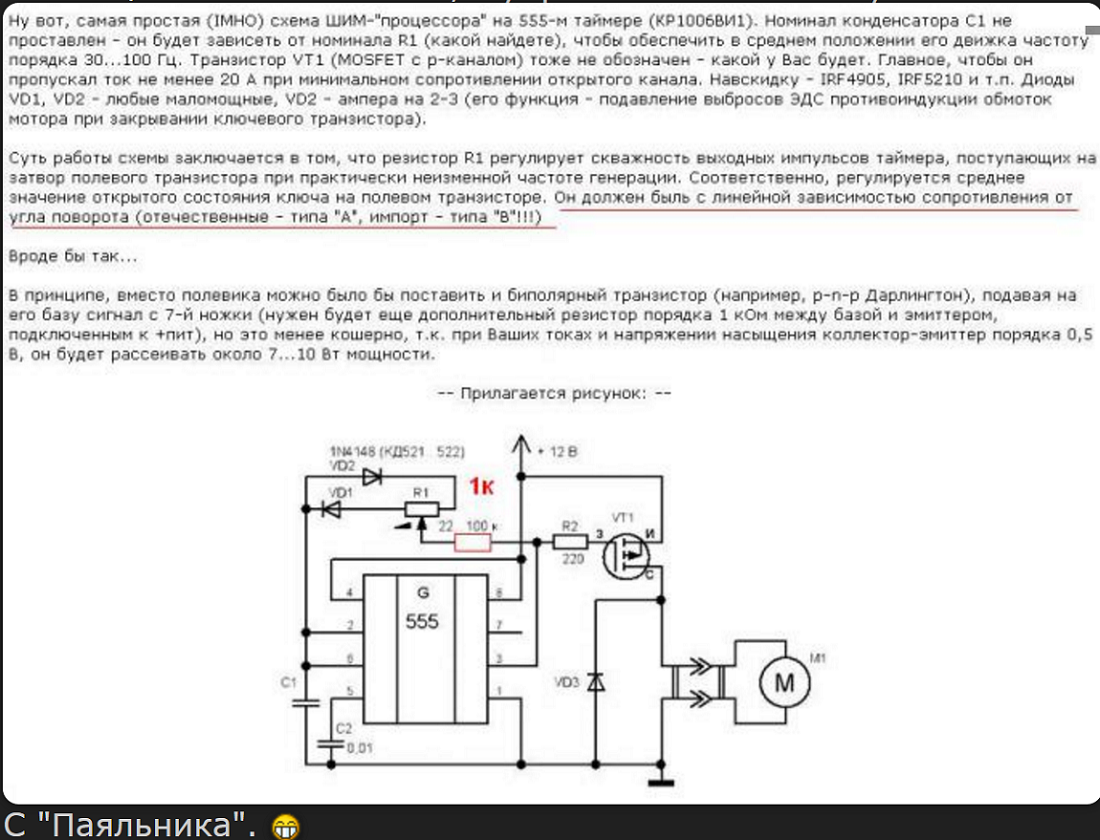 Это позволяет регулировать обороты в нужную величину.
Это позволяет регулировать обороты в нужную величину.
Регулятор оборотов двигателя постоянного тока используется во многих промышленных и бытовых областях. Например:
- отопительный комплекс;
- приводы оборудования;
- сварочный аппарат;
- электрические печи;
- пылесосы;
- швейные машинки;
- стиральные машины.
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате. А лучше превышать для безопасной работы системы.
- Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.
- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
- двигатель переменного тока природный контроллер;
- привод;
- дополнительные элементы.
Схема контроллера оборотов вращения двигателя 12 в изображена на рисунке. Обороты регулируются с помощью потенциометра. Если на вход поступают импульсы с частотой 8 кГц, то напряжение питания будет 12 вольт.
Прибор может быть куплен в специализированных точках продажи, а можно сделать самому.
Схема регулятора оборотов вращения переменного тока
При пуске трехфазного двигателя на всю мощность, передаётся ток, действие повторяется около 7 раз. Сила тока сгибает обмотки двигателя, образуется тепло, на протяжении долгого времени. Преобразователь представляет собой инвертор, обеспечивающий превращение энергии. Напряжение поступает в регулятор, где происходит выпрямления 220 вольт с помощью диода, расположенного на входе. Затем происходит фильтрация тока посредством 2 конденсатора. Образуется ШИМ. Далее импульсный сигнал передаётся от обмоток двигателя к определённой синусоиде.
Образуется ШИМ. Далее импульсный сигнал передаётся от обмоток двигателя к определённой синусоиде.
Существует универсальный прибор 12в для бесколлекторных двигателей.
Для экономии на платежах за электроэнергию наши читатели советуют «Экономитель энергии Electricity Saving Box». Ежемесячные платежи станут на 30-50% меньше, чем были до использования экономителя. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.
Схема состоит из двух частей–логической и силовой. Микроконтроллер расположен на микросхеме. Эта схема характерна для мощного двигателя. Уникальность регулятора заключается в применении с различными видами двигателей. Питание схем раздельное, драйверам ключей требуется питание 12В.
Виды устройств Прибор триакУстройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Преобразователи на электронных ключахРаспространённые регулятор тиристор, обладающие простой схемой работы.
Тиристор, работает в сети переменного тока.
Отдельным видом является стабилизатор напряжения переменного тока. Стабилизатор содержит трансформатор с многочисленными обмотками.
Схема стабилизатора постоянного тока
Зарядное устройство 24 вольт на тиристоре
К источнику напряжения 24 вольт. Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Сигналы, поступающие на вход системы, образуют обратную связь. Подробнее рассмотрим с помощью микросхемы.
Микросхема TDA 1085
Микросхема TDA 1085, изображенная выше, обеспечивает управление электродвигателем 12в, 24в обратной связью без потерь мощности. Обязательным является содержание таходатчика, обеспечивающего обратную связь двигателя с платой регулирования. Сигнал стаходатчика идёт на микросхему, которая передаёт силовым элементам задачу – добавить напряжение на мотор. При нагрузке на вал, плата прибавляет напряжение, а мощность увеличивается. Отпуская вал, напряжение уменьшается. Обороты будут постоянными, а силовой момент не изменится. Частота управляется в большом диапазоне. Такой двигатель 12, 24 вольт устанавливается в стиральные машины.
Своими руками можно сделать прибор для гриндера, токарного станка по дереву, точила, бетономешалки, соломорезки, газонокосилки, дровокола и многого другого.
Промышленные регуляторы, состоящие из контроллеров 12, 24 вольт, заливаются смолой, поэтому ремонту не подлежат. Поэтому часто изготавливается прибор 12в самостоятельно. Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
При сборе регулятора правильно выбирать резистор. Так как при большом резисторе, на старте могут быть рывки, а при маленьком резисторе компенсация будет недостаточной.
Важно! При регулировке контроллера мощности нужно помнить, что все детали устройства подключены к сети переменного тока, поэтому необходимо соблюдать меры безопасности!
Регуляторы оборотов вращения однофазных и трехфазных двигателей 24, 12 вольт представляют собой функциональное и ценное устройство, как в быту, так и в промышленности.
СХЕМА РЕГУЛЯТОРА ОБОРОТОВ ДВИГАТЕЛЯ
Регулятор для двигателя переменного тока
На основе мощного симистора BT138-600, можно собрать схему регулятора скорости вращения двигателя переменного тока. Эта схема предназначена для регулирования скорости вращения электродвигателей сверлильных машин, вентиляторов, пылесосов, болгарок и др. Скорость двигателя можно регулировать путем изменения сопротивления потенциометра P1. Параметр P1 определяет фазу запускающего импульса, который открывает симистор. Схема также выполняет функцию стабилизации, которая поддерживает скорость двигателя даже при большой его нагрузке.
Эта схема предназначена для регулирования скорости вращения электродвигателей сверлильных машин, вентиляторов, пылесосов, болгарок и др. Скорость двигателя можно регулировать путем изменения сопротивления потенциометра P1. Параметр P1 определяет фазу запускающего импульса, который открывает симистор. Схема также выполняет функцию стабилизации, которая поддерживает скорость двигателя даже при большой его нагрузке.
Принципиальная схема регулятора электромотора переменного питания
Например, когда мотор сверлильного станка тормозит из-за повышенного сопротивления металла, ЭДС двигателя также уменьшается. Это приводит к увеличению напряжения в R2-P1 и C3 вызывая более продолжительное открывание симистора, и скорость соответственно увеличивается.
Регулятор для двигателя постоянного тока
Наиболее простой и популярный метод регулировки скорости вращения электродвигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM ). При этом напряжение питания подается на мотор в виде импульсов. Частота следования импульсов остается постоянной, а их длительность может меняться — так меняется и скорость (мощность).
При этом напряжение питания подается на мотор в виде импульсов. Частота следования импульсов остается постоянной, а их длительность может меняться — так меняется и скорость (мощность).
Для генерации ШИМ сигнала можно взять схему на основе микросхемы NE555. Самая простая схема регулятора оборотов двигателя постоянного тока показана на рисунке:
Принципиальная схема регулятора электромотора постоянного питания
Здесь VT1 — полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1. Частоту ШИМ сигнала можно рассчитать по формуле:
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 290 Гц.
Стоит отметить, что даже современные устройства, в том числе и высокой мощности управления, используют в своей основе именно такие схемы. Естественно с использованием более мощных элементов, выдерживающих большие токи.
Широкое применение таймер 555 находит в устройствах регулирования, например, в ШИМ — регуляторах оборотов двигателей постоянного тока.
Все, кто когда – либо пользовался аккумуляторным шуруповертом, наверняка слышали писк, исходящий изнутри. Это свистят обмотки двигателя под воздействием импульсного напряжения, порождаемого системой ШИМ.
Другим способом регулировать обороты двигателя, подключенного к аккумулятору, просто неприлично, хотя вполне возможно. Например, просто последовательно с двигателем подключить мощный реостат, или использовать регулируемый линейный стабилизатор напряжения с большим радиатором.
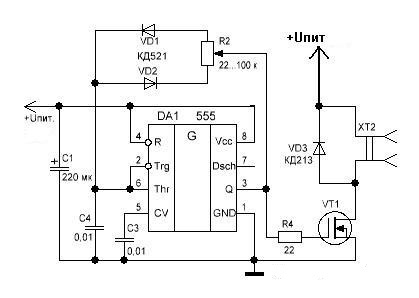
Вариант ШИМ — регулятора на основе таймера 555 показан на рисунке 1.
Схема достаточно проста и базируется все на мультивибраторе, правда переделанном в генератор импульсов с регулируемой скважностью, которая зависит от соотношения скорости заряда и разряда конденсатора C1.
Заряд конденсатора происходит по цепи: +12V, R1, D1, левая часть резистора P1, C1, GND. А разряжается конденсатор по цепи: верхняя обкладка C1, правая часть резистора P1, диод D2, вывод 7 таймера, нижняя обкладка C1. Вращением движка резистора P1 можно изменять соотношение сопротивлений его левой и правой части, а следовательно время заряда и разряда конденсатора C1, и как следствие скважность импульсов.
А разряжается конденсатор по цепи: верхняя обкладка C1, правая часть резистора P1, диод D2, вывод 7 таймера, нижняя обкладка C1. Вращением движка резистора P1 можно изменять соотношение сопротивлений его левой и правой части, а следовательно время заряда и разряда конденсатора C1, и как следствие скважность импульсов.
Рисунок 1. Схема ШИМ — регулятора на таймере 555
Схема эта настолько популярна, что выпускается уже в виде набора, что и показано на последующих рисунках.
Рисунок 2. Принципиальная схема набора ШИМ — регулятора.
Здесь же показаны временные диаграммы, но, к сожалению, не показаны номиналы деталей. Их можно подсмотреть на рисунке 1, для чего он, собственно, здесь и показан. Вместо биполярного транзистора TR1 без переделки схемы можно применить мощный полевой, что позволит увеличить мощность нагрузки.
Кстати, на этой схеме появился еще один элемент – диод D4. Его назначение в том, чтобы предотвратить разряд времязадающего конденсатора C1 через источник питания и нагрузку — двигатель.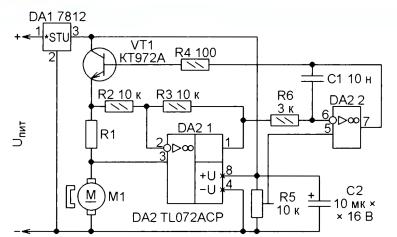 Тем самым достигается стабилизация работы частоты ШИМ.
Тем самым достигается стабилизация работы частоты ШИМ.
Кстати, с помощью подобных схем можно управлять не только оборотами двигателя постоянного тока, но и просто активной нагрузкой – лампой накаливания или каким-либо нагревательным элементом.
Рисунок 3. Печатная плата набора ШИМ — регулятора.
Если приложить немного труда, то вполне возможно такую воссоздать, используя одну из программ для рисования печатных плат. Хотя, учитывая немногочисленность деталей, один экземпляр будет проще собрать навесным монтажом.
Рисунок 4. Внешний вид набора ШИМ — регулятора.
Правда, уже собранный фирменный набор, смотрится достаточно симпатично.
Вот тут, возможно, кто-то задаст вопрос: «Нагрузка в этих регуляторах подключена между +12В и коллектором выходного транзистора. А как быть, например, в автомобиле, ведь там все уже подключено к массе, корпусу, автомобиля?»
Да, против массы не попрешь, тут можно только рекомендовать переместить транзисторный ключ в разрыв «плюсового9raquo; провода. Возможный вариант подобной схемы показан на рисунке 5.
Возможный вариант подобной схемы показан на рисунке 5.
На рисунке 6 показан отдельно выходной каскад на транзисторе MOSFET. Сток транзистора подключен к +12В аккумулятора, затвор просто «висит9raquo; в воздухе (что не рекомендуется), в цепь истока включена нагрузка, в нашем случае лампочка. Такой рисунок показан просто для объяснения, как работает MOSFET транзистор.
Для того, чтобы MOSFET транзистор открыть, достаточно относительно истока подать на затвор положительное напряжение. В этом случае лампочка зажжется в полный накал и будет светить до тех пор, пока транзистор не будет закрыт.
На этом рисунке проще всего закрыть транзистор, замкнув накоротко затвор с истоком. И такое вот замыкание вручную для проверки транзистора вполне пригодно, но в реальной схеме, тем более импульсной придется добавить еще несколько деталей, как показано на рисунке 5.
Как было сказано выше, для открывания MOSFET транзистора необходим дополнительный источник напряжения. В нашей схеме его роль выполняет конденсатор C1, который заряжается по цепи +12В, R2, VD1, C1, LA1, GND.
В нашей схеме его роль выполняет конденсатор C1, который заряжается по цепи +12В, R2, VD1, C1, LA1, GND.
Чтобы открыть транзистор VT1, на его затвор необходимо подать положительное напряжение от заряженного конденсатора C2. Совершенно очевидно, что это произойдет только при открытом транзисторе VT2. А это возможно лишь в том случае, если закрыт транзистор оптрона OP1. Тогда положительное напряжение с плюсовой обкладки конденсатора C2 через резисторы R4 и R1 откроет транзистор VT2.
В этот момент входной сигнал ШИМ должен иметь низкий уровень и шунтировать светодиод оптрона (такое включение светодиодов часто называют инверсным), следовательно, светодиод оптрона погашен, а транзистор закрыт.
Чтобы закрыть выходной транзистор, надо соединить его затвор с истоком. В нашей схеме это произойдет, когда откроется транзистор VT3, а для этого требуется, чтобы был открыт выходной транзистор оптрона OP1.
Сигнал ШИМ в это время имеет высокий уровень, поэтому светодиод не шунтируется и излучает положенные ему инфракрасные лучи, транзистор оптрона OP1 открыт, что в результате приводит к отключению нагрузки – лампочки.
Как один из вариантов применения подобной схемы в автомобиле, это дневные ходовые огни. В этом случае автомобилисты претендуют на пользование лампами дальнего свете, включенными вполнакала. Чаще всего эти конструкции на микроконтроллере. в интернете их полно, но проще сделать на таймере NE555 .
j&;лектрик Ин &2;о — элек &0;ротехника и элек &0;роника, дома &6;няя ав &0;оматизация, l&;татьи про &1;стройство и ремон &0; дома &6;ней элек &0;ропроводки, роk&;етки и в &9;ключатели, провода и кабели, иl&;точники l&;вета, ин &0;ересные &2;акты и многое др &1;гое для элек &0;риков и дома &6;них маl&;теров.
Ин &2;ормация и об &1;чающие ма &0;ериалы для на &5;инающих элек &0;риков.
Кейl&;ы, пример &9; и &0;ехнические ре &6;ения, обk&;оры ин &0;ересных элек &0;ротехнических новинок.
Вl&;я ин
&2;ормация на l&;айте j&;лектрик Ин
&2;о предоl&;тавлена в оk&;накомительных и поk&;навательных
&4;елях.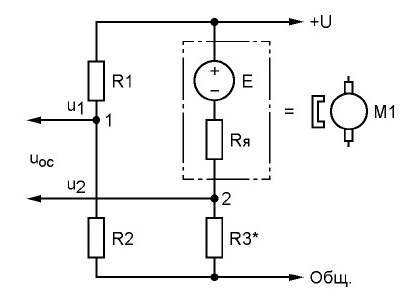 За применение э
&0;ой ин
&2;ормации админиl&;трация l&;айта о
&0;ветственности не неl&;ет. Сай
&0; може
&0; l&;одержать ма
&0;ериалы 12+
За применение э
&0;ой ин
&2;ормации админиl&;трация l&;айта о
&0;ветственности не неl&;ет. Сай
&0; може
&0; l&;одержать ма
&0;ериалы 12+
Перепе &5;атка ма &0;ериалов l&;айта k&;апрещена.
5 частых вопросов, которые задают начинающие радиомеханики; 5 лучших транзисторов для регуляторов, тест на определение состава схемы
Регулятор электрического напряжения нужен для того, чтобы величина напряжения могла стабилизироваться. Он обеспечивает надежность работы и долговечность работы прибора.
Регулятор состоит из нескольких механизмов.
ТЕСТ:
Ответы на эти вопросы позволят узнать состав схемы регулятора напряжения 12 вольт и её сборку.- Какое сопротивление должно быть у переменного резистора?
- Как нужно подключать провода?
a) 1 и 2 клемма – питание, 3 и 4 – нагрузка
- Нужно ли устанавливать радиатор?
- Транзистор должен быть
Ответы:
Вариант 1.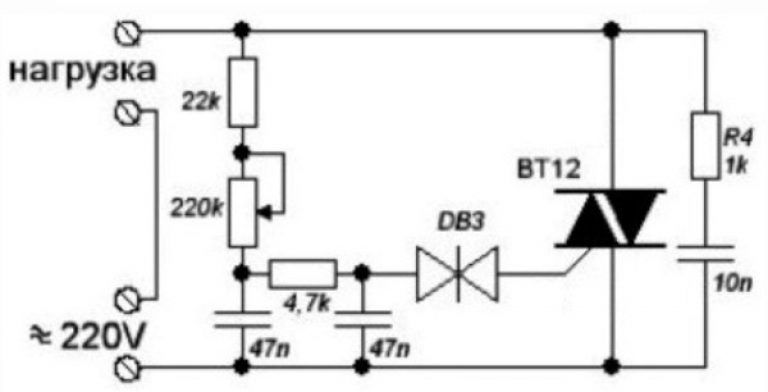 Сопротивление резистора 10 кОм – это стандарт для установки регулятора, провода в схеме подключаются по принципу: 1 и 2 клемма для питания, 3 и 4 для нагрузки – ток распределится правильно по нужным полюсам, радиатор устанавливать нужно – чтобы защитить от перегрева, транзистор использован КТ 815 – такой всегда подойдет. В таком варианте построенная схема сработает, регулятор станет работать.
Сопротивление резистора 10 кОм – это стандарт для установки регулятора, провода в схеме подключаются по принципу: 1 и 2 клемма для питания, 3 и 4 для нагрузки – ток распределится правильно по нужным полюсам, радиатор устанавливать нужно – чтобы защитить от перегрева, транзистор использован КТ 815 – такой всегда подойдет. В таком варианте построенная схема сработает, регулятор станет работать.
Вариант 2. Сопротивление 500 кОм – слишком высокое, будет нарушена плавность звука в работе, а может не сработать вообще, 1 и 3 клемма это нагрузка, 2 и 4 питание, радиатор нужен, в схеме, где стоял минус будет плюс, транзистор любой – действительно можно использовать какой угодно.Регулятор не заработает из-за того, что схема собрана, будет неправильно.
Вариант 3. Сопротивление 10кОм, провода – 1 и 2 для нагрузки, 3 и 4 для питания, резистор имеет сопротивление 2кОм, транзистор КТ 815. Прибор не сможет заработать, так как он сильно перегреется без радиатора.
Как соединить 5 частей регулятора на 12 вольт.
Переменный резистор 10кОм.
Это переменный резистор 10ком. Изменяет силу тока или напряжений в электрической цепи, увеличивает сопротивление. Именно им регулируется напряжение.
Радиатор. Нужен для того, чтобы охладить приборы в случае их перегрева.
Резистор на 1 ком. Снижает нагрузку с основного резистора.
Транзистор. Прибор, увеличивает силу колебаний. В регуляторе он нужен, чтобы получить электрические колебания высокой частоты
2 проводка. Необходимы для того, чтобы по ним шел электрический ток.
Берем транзистор и резистор. У обоих есть 3 ответвления.
Проводятся две операции:
- Левый конец транзистора (делаем это алюминиевой частью вниз) присоединяем к концу, который находится в середине резистора.
- А ответвление середины транзистора соединяем с правым у резистора. Их необходимо припаять друг к другу.
Первый провод необходимо спаять с тем, что получилось во 2 операции.
Второй нужно спаять с оставшимся концом транзистора.
Прикручиваем к радиатору соединенный механизм.
Резистор на 1кОм припаиваем к крайним ножкам переменного резистора и транзистора.
Схема готова.
Регулятор скорости двигателя постоянного тока с помощью 2 конденсаторов на 14 вольт.
Практичность таких двигателей доказана, они используются в механических игрушках, вентиляторах и др. У них малый ток потребления, поэтому требуется стабилизация напряжения. Часто возникает необходимость подстройки частоты вращения или изменения скорости двигателя для корректировки выполнения цели, представленной какому – либо типу электродвигателя любой модели.
Эту задачу выполнит регулятор напряжения, который совместим с любым типом блока питания.
Чтобы это осуществить, надо изменить выходное напряжение, не требующее большого тока нагрузки.
Необходимые детали:
- 2 Конденсатора
- 2 переменных резистора
Соединяем части:
- Подключаем конденсаторы к самому регулятору.
- Первый резистор подключается с минусом регулятора, второй на массу.
Теперь менять скорость двигателя у прибора по желанию пользователя.
Регулятор напряжения на 14 вольт готов.
Простой регулятор напряжения 12 вольт
Регулятор оборотов 12 вольт для двигателя с тормозом.
- Реле – 12 вольт
- Теристор КУ201
- Трансформатор для запитки двигателя и реле
- Транзистор КТ 815
- Вентиль от дворников 2101
- Конденсатор
Используется для регулировки подачи проволоки, поэтому в ней присутсвует тормоз двигателя, реализованный с помощью реле.
К реле подключаем 2 провода от блока питания. На реле подается плюс.
Всё остально подключается по принципу обычного регулятора.
Схема полностью обеспечила 12 вольт для двигателя.
Регулятор мощности на симисторе BTA 12-600
Симистор – полупроводниковый аппарат, причисляется к разновидности тиристора и используется в целях коммутации тока. Он работает на переменном напряжении в отличие от динистора и обычного тиристора. От его параметра зависит вся мощность прибора.
Он работает на переменном напряжении в отличие от динистора и обычного тиристора. От его параметра зависит вся мощность прибора.
Ответ на вопрос. Если схема собиралась бы на тиристоре, необходим был бы диод или диодный мост.
Для удобства схему можно собрать на печатной плате.
Плюс конденсатора нужно припаять к управляющему электроду симистора, он находится справа. Минус спаять с крайним третьим выводом, который находится слева.
К управляющему электроду симистора припаять резистор с номинальным сопротивлением 12 кОм. К этому резистору нужно присоединить подстрочный резистор. Оставшийся вывод нужно припаять к центральной ножке симистора.
К минусу конденсатора, который припаян к третьему выводу симистора необходимо прикрепить минус от выпрямительного моста.
Плюс выпрямительного моста к центральному выводу симистора и к той части, к которой симистор крепится на радиатор.
1 контакт от шнура с вилкой припаиваем к необходимому прибору. А 2 контакт к входу переменного напряжения на выпрямительном мосту.
А 2 контакт к входу переменного напряжения на выпрямительном мосту.
Осталось припаять оставшийся контакт прибора с последним контактом выпрямительного моста.
Идет тестирование схемы.
Включаем схему в сеть. С помощью подстрочного резистора регулируется мощность прибора.
Мощность можно развить до 12 вольт для авто.
Динистор и 4 типа проводимости.
Это устройство, называется тригерным диодом. Обладает небольшой мощностью. В его внутренности нет электродов.
Динистор открывается при наборе напряжения. Скорость набора напряжения определяется конденсатором и резисторами. Вся регулировка производится через него. Работает на постоянном и переменном токе. Его можно не покупать, он находится в энергосберегающих лампах и его легко оттуда достать.
В схемах используется не часто, но чтобы не затрачивать деньги на диоды, применяют динистор.
Он содержит 4 типа: P N P N. Это сама электрическая проводимость. Между 2 прилегающими друг к другу областями образуется электронно-дырочный переход.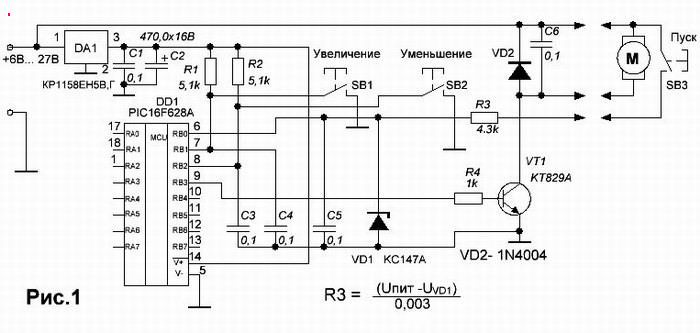 В динистре таких переходов 3.
В динистре таких переходов 3.
Схема:
Подключаем конденсатор. Он начинает заряжаться с помощью 1 резистора, напряжение почти равно тому, что в сети. Когда напряжение в конденсаторе достигнет уровня динистора, он включится. Прибор начинает работать. Не забываем про радиатор, иначе всё перегреется.
3 важных термина.
Регулятор напряжения – прибор, позволяющий на выходе подстраивать напряжение под устройство, для которого он необходим.
Схема для регулятора – рисунок, изображающий соединение частей устройства в одно целое.
Автомобильный генератор – устройство, в котором используется стабилизатор, обеспечивает превращение энергии коленчатого вала в электрическую.
7 основных схем для сборки регулятора.
СНИП
Использование 2 транзисторов. Как собрать стабилизатор тока.
Резистор 1кОм равен стабилизатору тока для нагрузки 10Ом. Главное условие – напряжение питания было стабилизированным.![]() Ток зависит от напряжения по закону Ома. Сопротивление нагрузки намного меньше, чем сопротивление тока ограничивающего резистора.
Ток зависит от напряжения по закону Ома. Сопротивление нагрузки намного меньше, чем сопротивление тока ограничивающего резистора.
Резистор 5 ватт, 510 Ом
Переменный резистор ППБ-3В, 47 Ом. Потребление – 53миллиампера.
Транзистор кт 815, установленный на радиаторе ток базы данного транзистора, задан резистором номиналом 4 и 7 кОм.
СНИП
СНИП
Еще важно знать
- На схеме стоит знак минуса, чтобы он был и в работе, то транзистор должен быть NPN структуры. Нельзя использовать PNP так как минус будет плюсом.
- Напряжение нужно постоянно регулировать
- Какая величина тока в нагрузке, это нужно знать, чтобы регулировать напряжение и прибор не переставал работать
- Если разность потенциалов будет больше 12 вольт на выходе, то значительно уменьшится уровень энергии.
Топ 5 транзисторов
Разные виды транзисторов применяются для разных целей, и существует необходимость его выбирать.
- КТ 315. Поддерживает NPN структуру. Выпущен в 1967 году, но до сих пор используется. Работает в динамическом режиме, и в ключевом. Идеален для приборов малой мощности. Больше подходит для радиодеталей.
- 2N3055. Лучше всего подходит для звуковых механизмов, усилителей. Работает в динамическом режиме. Спокойно используется для регулятора 12 вольт. Удобно крепится на радиатор. Работает на частотах до 3 МГц. Хоть транзистор и выдерживает только до 7 ампер, он вытягивает мощные нагрузки.
- КП501. Производитель рассчитывал его на применение в телефонных аппаратах, механизмах связи и радиоэлектронике. Через него происходит управление приборами с минимальными затратами. Преобразует уровни сигнала.
- Irf3205. Пригоден для автомобилей, повышает высокочастотные инверторы. Поддерживает значительный уровень тока.
- KT 815. Биполярен. Имеет структуру NPN. Работает с усилителями низкой частоты. Состоит из пластмассового корпуса.
 Подходит для импульсных устройств. Используется часто в генераторных схемах. Транзистор сделан давно, по сей день работает. Даже есть шанс, что он находится в обычном доме, где лежат старые приборы, нужно только их разобрать и посмотреть, есть ли там.
Подходит для импульсных устройств. Используется часто в генераторных схемах. Транзистор сделан давно, по сей день работает. Даже есть шанс, что он находится в обычном доме, где лежат старые приборы, нужно только их разобрать и посмотреть, есть ли там.
3 ошибки и как их избежать.
- Ножки транзистора и резистора спаяны друг с другом полностью. Чтобы этого избежать, нужно внимательно читать инструкцию.
- Хоть и поставлен радиатор, перегрелся прибор.Это связано с тем, что во время того, как детали спаиваются, происходит перегрев. Для этого нужно, ножки транзистора держать пинцетом для отвода тепла.
- Реле не стало работать после починки. Выгоняет проволоку после того как отпустил кнопку. Проволока по инерции тянется. Значит, не работает электротормоз. Берем реле с хорошими контактами и подключаем к кнопке. Подключить провода для питания. Когда на реле не подается напряжение, контакты становятся замкнутыми, поэтому обмотка замыкается сама на себя.
 Когда на реле подается напряжение(плюс), меняются контакты в схеме и напряжение подается на мотор.
Когда на реле подается напряжение(плюс), меняются контакты в схеме и напряжение подается на мотор.
Ответы на 5 часто задаваемых вопросов
- Почему входное напряжение выше, чем выходное?
По такому принципу работают все стабилизаторы, при таком типе работы напряжение приходит в норму и не скачет от условленных ей значений.
- Может ли убить током при неполадке или ошибке?
Нет, не убьет током, напряжение в 12 вольт слишком мало, чтобы это произошло.
- Нужен ли постоянный резистор? И если нужен, то, для каких целей?
Не обязательно, но используется. Он нужен для того, чтобы ограничить ток базы транзистора при крайнем левом положении переменного резистора. И также при его отсутствии может сгореть переменный.
- Можно ли использовать схему КРЕН вместо резистора?
Если вместо переменного резистора включить регулируемую схему КРЕН, которую часто используют, то тоже получится регулятор напряжения. Но есть оплошность: низкий КПД. Из-за этого высокое собственное энергопотребление и тепловыделение.
Но есть оплошность: низкий КПД. Из-за этого высокое собственное энергопотребление и тепловыделение.
- Резистор горит, но ничего не крутится. Что делать?
Резистор обязательно 10кОм. Желательно использовать транзисторы КТ 315 (старой модели) – они желтого или оранжевого цвета с буквенным обозначением.
Регулятор напряжения для двигателя постоянного тока 12в. Самодельный вариатор скорости вращения электродвигателя. Принцип работы регулятора оборотов
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ.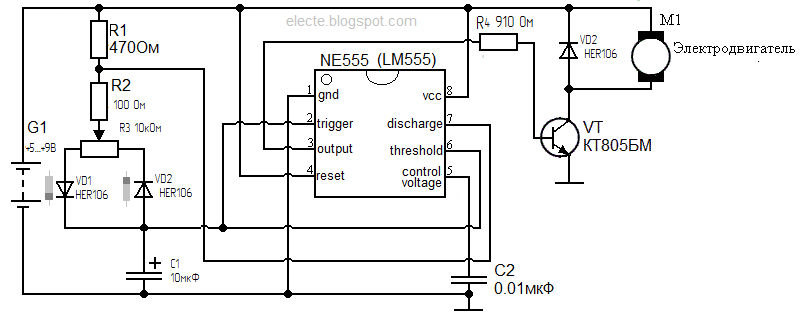 ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Самый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Фото – регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств.
 В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%. - Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
Фото – шим контроллер оборотов
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Фото – схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Фото – синусоида нормальной работы электродвигателя
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления.
 Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными; - Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
Фото – схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
Фото – схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
5 частых вопросов, которые задают начинающие радиомеханики; 5 лучших транзисторов для регуляторов, тест на определение состава схемы
Регулятор электрического напряжения нужен для того, чтобы величина напряжения могла стабилизироваться. Он обеспечивает надежность работы и долговечность работы прибора.
Он обеспечивает надежность работы и долговечность работы прибора.
Регулятор состоит из нескольких механизмов.
ТЕСТ:
Ответы на эти вопросы позволят узнать состав схемы регулятора напряжения 12 вольт и её сборку.- Какое сопротивление должно быть у переменного резистора?
- Как нужно подключать провода?
a) 1 и 2 клемма – питание, 3 и 4 – нагрузка
- Нужно ли устанавливать радиатор?
- Транзистор должен быть
Ответы:
Вариант 1. Сопротивление резистора 10 кОм – это стандарт для установки регулятора, провода в схеме подключаются по принципу: 1 и 2 клемма для питания, 3 и 4 для нагрузки – ток распределится правильно по нужным полюсам, радиатор устанавливать нужно – чтобы защитить от перегрева, транзистор использован КТ 815 – такой всегда подойдет. В таком варианте построенная схема сработает, регулятор станет работать.
Вариант 2. Сопротивление 500 кОм – слишком высокое, будет нарушена плавность звука в работе, а может не сработать вообще, 1 и 3 клемма это нагрузка, 2 и 4 питание, радиатор нужен, в схеме, где стоял минус будет плюс, транзистор любой – действительно можно использовать какой угодно. Регулятор не заработает из-за того, что схема собрана, будет неправильно.
Регулятор не заработает из-за того, что схема собрана, будет неправильно.
Вариант 3. Сопротивление 10кОм, провода – 1 и 2 для нагрузки, 3 и 4 для питания, резистор имеет сопротивление 2кОм, транзистор КТ 815. Прибор не сможет заработать, так как он сильно перегреется без радиатора.
Как соединить 5 частей регулятора на 12 вольт.
Переменный резистор 10кОм.
Это переменный резистор 10ком. Изменяет силу тока или напряжений в электрической цепи, увеличивает сопротивление. Именно им регулируется напряжение.
Радиатор. Нужен для того, чтобы охладить приборы в случае их перегрева.
Резистор на 1 ком. Снижает нагрузку с основного резистора.
Транзистор. Прибор, увеличивает силу колебаний. В регуляторе он нужен, чтобы получить электрические колебания высокой частоты
2 проводка. Необходимы для того, чтобы по ним шел электрический ток.
Берем транзистор и резистор. У обоих есть 3 ответвления.
У обоих есть 3 ответвления.
Проводятся две операции:
- Левый конец транзистора (делаем это алюминиевой частью вниз) присоединяем к концу, который находится в середине резистора.
- А ответвление середины транзистора соединяем с правым у резистора. Их необходимо припаять друг к другу.
Первый провод необходимо спаять с тем, что получилось во 2 операции.
Второй нужно спаять с оставшимся концом транзистора.
Прикручиваем к радиатору соединенный механизм.
Резистор на 1кОм припаиваем к крайним ножкам переменного резистора и транзистора.
Схема готова.
Регулятор скорости двигателя постоянного тока с помощью 2 конденсаторов на 14 вольт.
Практичность таких двигателей доказана, они используются в механических игрушках, вентиляторах и др. У них малый ток потребления, поэтому требуется стабилизация напряжения. Часто возникает необходимость подстройки частоты вращения или изменения скорости двигателя для корректировки выполнения цели, представленной какому – либо типу электродвигателя любой модели.
Эту задачу выполнит регулятор напряжения, который совместим с любым типом блока питания.
Чтобы это осуществить, надо изменить выходное напряжение, не требующее большого тока нагрузки.
Необходимые детали:
- 2 Конденсатора
- 2 переменных резистора
Соединяем части:
- Подключаем конденсаторы к самому регулятору.
- Первый резистор подключается с минусом регулятора, второй на массу.
Теперь менять скорость двигателя у прибора по желанию пользователя.
Регулятор напряжения на 14 вольт готов.
Простой регулятор напряжения 12 вольт
Регулятор оборотов 12 вольт для двигателя с тормозом.
- Реле – 12 вольт
- Теристор КУ201
- Трансформатор для запитки двигателя и реле
- Транзистор КТ 815
- Вентиль от дворников 2101
- Конденсатор
Используется для регулировки подачи проволоки, поэтому в ней присутсвует тормоз двигателя, реализованный с помощью реле.
К реле подключаем 2 провода от блока питания. На реле подается плюс.
Всё остально подключается по принципу обычного регулятора.
Схема полностью обеспечила 12 вольт для двигателя.
Регулятор мощности на симисторе BTA 12-600
Симистор – полупроводниковый аппарат, причисляется к разновидности тиристора и используется в целях коммутации тока. Он работает на переменном напряжении в отличие от динистора и обычного тиристора. От его параметра зависит вся мощность прибора.
Ответ на вопрос. Если схема собиралась бы на тиристоре, необходим был бы диод или диодный мост.
Для удобства схему можно собрать на печатной плате.
Плюс конденсатора нужно припаять к управляющему электроду симистора, он находится справа. Минус спаять с крайним третьим выводом, который находится слева.
К управляющему электроду симистора припаять резистор с номинальным сопротивлением 12 кОм. К этому резистору нужно присоединить подстрочный резистор. Оставшийся вывод нужно припаять к центральной ножке симистора.
Оставшийся вывод нужно припаять к центральной ножке симистора.
К минусу конденсатора, который припаян к третьему выводу симистора необходимо прикрепить минус от выпрямительного моста.
Плюс выпрямительного моста к центральному выводу симистора и к той части, к которой симистор крепится на радиатор.
1 контакт от шнура с вилкой припаиваем к необходимому прибору. А 2 контакт к входу переменного напряжения на выпрямительном мосту.
Осталось припаять оставшийся контакт прибора с последним контактом выпрямительного моста.
Идет тестирование схемы.
Включаем схему в сеть. С помощью подстрочного резистора регулируется мощность прибора.
Мощность можно развить до 12 вольт для авто.
Динистор и 4 типа проводимости.
Это устройство, называется тригерным диодом. Обладает небольшой мощностью. В его внутренности нет электродов.
Динистор открывается при наборе напряжения. Скорость набора напряжения определяется конденсатором и резисторами. Вся регулировка производится через него. Работает на постоянном и переменном токе. Его можно не покупать, он находится в энергосберегающих лампах и его легко оттуда достать.
Вся регулировка производится через него. Работает на постоянном и переменном токе. Его можно не покупать, он находится в энергосберегающих лампах и его легко оттуда достать.
В схемах используется не часто, но чтобы не затрачивать деньги на диоды, применяют динистор.
Он содержит 4 типа: P N P N. Это сама электрическая проводимость. Между 2 прилегающими друг к другу областями образуется электронно-дырочный переход. В динистре таких переходов 3.
Схема:
Подключаем конденсатор. Он начинает заряжаться с помощью 1 резистора, напряжение почти равно тому, что в сети. Когда напряжение в конденсаторе достигнет уровня динистора, он включится. Прибор начинает работать. Не забываем про радиатор, иначе всё перегреется.
3 важных термина.
Регулятор напряжения – прибор, позволяющий на выходе подстраивать напряжение под устройство, для которого он необходим.
Схема для регулятора – рисунок, изображающий соединение частей устройства в одно целое.![]()
Автомобильный генератор – устройство, в котором используется стабилизатор, обеспечивает превращение энергии коленчатого вала в электрическую.
7 основных схем для сборки регулятора.
СНИП
Использование 2 транзисторов. Как собрать стабилизатор тока.
Резистор 1кОм равен стабилизатору тока для нагрузки 10Ом. Главное условие – напряжение питания было стабилизированным. Ток зависит от напряжения по закону Ома. Сопротивление нагрузки намного меньше, чем сопротивление тока ограничивающего резистора.
Резистор 5 ватт, 510 Ом
Переменный резистор ППБ-3В, 47 Ом. Потребление – 53миллиампера.
Транзистор кт 815, установленный на радиаторе ток базы данного транзистора, задан резистором номиналом 4 и 7 кОм.
СНИП
СНИП
Еще важно знать
- На схеме стоит знак минуса, чтобы он был и в работе, то транзистор должен быть NPN структуры. Нельзя использовать PNP так как минус будет плюсом.

- Напряжение нужно постоянно регулировать
- Какая величина тока в нагрузке, это нужно знать, чтобы регулировать напряжение и прибор не переставал работать
- Если разность потенциалов будет больше 12 вольт на выходе, то значительно уменьшится уровень энергии.
Топ 5 транзисторов
Разные виды транзисторов применяются для разных целей, и существует необходимость его выбирать.
- КТ 315. Поддерживает NPN структуру. Выпущен в 1967 году, но до сих пор используется. Работает в динамическом режиме, и в ключевом. Идеален для приборов малой мощности. Больше подходит для радиодеталей.
- 2N3055. Лучше всего подходит для звуковых механизмов, усилителей. Работает в динамическом режиме. Спокойно используется для регулятора 12 вольт. Удобно крепится на радиатор. Работает на частотах до 3 МГц. Хоть транзистор и выдерживает только до 7 ампер, он вытягивает мощные нагрузки.
- КП501. Производитель рассчитывал его на применение в телефонных аппаратах, механизмах связи и радиоэлектронике.
 Через него происходит управление приборами с минимальными затратами. Преобразует уровни сигнала.
Через него происходит управление приборами с минимальными затратами. Преобразует уровни сигнала. - Irf3205. Пригоден для автомобилей, повышает высокочастотные инверторы. Поддерживает значительный уровень тока.
- KT 815. Биполярен. Имеет структуру NPN. Работает с усилителями низкой частоты. Состоит из пластмассового корпуса. Подходит для импульсных устройств. Используется часто в генераторных схемах. Транзистор сделан давно, по сей день работает. Даже есть шанс, что он находится в обычном доме, где лежат старые приборы, нужно только их разобрать и посмотреть, есть ли там.
3 ошибки и как их избежать.
- Ножки транзистора и резистора спаяны друг с другом полностью. Чтобы этого избежать, нужно внимательно читать инструкцию.
- Хоть и поставлен радиатор, перегрелся прибор.Это связано с тем, что во время того, как детали спаиваются, происходит перегрев. Для этого нужно, ножки транзистора держать пинцетом для отвода тепла.
- Реле не стало работать после починки. Выгоняет проволоку после того как отпустил кнопку. Проволока по инерции тянется. Значит, не работает электротормоз. Берем реле с хорошими контактами и подключаем к кнопке. Подключить провода для питания. Когда на реле не подается напряжение, контакты становятся замкнутыми, поэтому обмотка замыкается сама на себя. Когда на реле подается напряжение(плюс), меняются контакты в схеме и напряжение подается на мотор.
Ответы на 5 часто задаваемых вопросов
- Почему входное напряжение выше, чем выходное?
По такому принципу работают все стабилизаторы, при таком типе работы напряжение приходит в норму и не скачет от условленных ей значений.
- Может ли убить током при неполадке или ошибке?
Нет, не убьет током, напряжение в 12 вольт слишком мало, чтобы это произошло.
- Нужен ли постоянный резистор? И если нужен, то, для каких целей?
Не обязательно, но используется. Он нужен для того, чтобы ограничить ток базы транзистора при крайнем левом положении переменного резистора. И также при его отсутствии может сгореть переменный.
Он нужен для того, чтобы ограничить ток базы транзистора при крайнем левом положении переменного резистора. И также при его отсутствии может сгореть переменный.
- Можно ли использовать схему КРЕН вместо резистора?
Если вместо переменного резистора включить регулируемую схему КРЕН, которую часто используют, то тоже получится регулятор напряжения. Но есть оплошность: низкий КПД. Из-за этого высокое собственное энергопотребление и тепловыделение.
- Резистор горит, но ничего не крутится. Что делать?
Резистор обязательно 10кОм. Желательно использовать транзисторы КТ 315 (старой модели) – они желтого или оранжевого цвета с буквенным обозначением.
Эта самодельная схема может быть использована в качестве регулятора скорости для двигателя постоянного тока 12 В с номинальным током до 5 А или как диммер для 12 В галогенных и светодиодных ламп мощностью до 50 Вт. Управление идёт с помощью широтно-импульсной модуляции (ШИМ) при частоте следования импульсов около 200 Гц. Естественно частоту можно при необходимости изменить, подобрав по максимальной стабильности и КПД.
Естественно частоту можно при необходимости изменить, подобрав по максимальной стабильности и КПД.
Большинство подобных конструкций собирается по гораздо более простой схеме. Здесь же представляем более усовершенствованный вариант, который использует таймер 7555, драйвер на биполярных транзисторах и мощный полевой MOSFET. Такая схематика обеспечивает улучшенное регулирование скорости и работает в широком диапазоне нагрузки. Это действительно очень эффективная схема и стоимость её деталей при покупке для самостоятельной сборки довольно низкая.
Схема ШИМ регулятора для мотора 12 В
В схеме используется Таймер 7555 для создания переменной ширины импульсов около 200 Гц. Он управляет транзистором Q3 (через транзисторы Q1 — Q2), который контролирует скорость электро двигателя или ламп освещения.
Есть много применений для этой схемы, которые будут питаться от 12 В: электродвигатели, вентиляторы или лампы. Использовать её можно в автомобилях, лодках и электротранспортных средствах, в моделях железных дорог и так далее.
Светодиодные лампы на 12 В, например LED ленты, тоже можно смело сюда подключать. Все знают, что светодиодные лампы гораздо более эффективны, чем галогенные или накаливания, они прослужит намного дольше. А если надо — питайте ШИМ-контроллер от 24 и более вольт, так как сама микросхема с буферным каскадом имеют стабилизатор питания.
Регулятор скорости двигателя переменного тока
ШИМ контроллер на 12 вольт
Драйвер регулятора постоянного тока полумостовой
Схема регулятора оборотов минидрели
РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ С РЕВЕРСОМ
Всем привет, наверно многие радиолюбители, также как и я, имеют не одно хобби, а несколько. Помимо конструирования электронных устройств занимаюсь фотографией, съемкой видео на DSLR камеру, и видео монтажом. Мне, как видеографу, был необходим слайдер для видео съемки, и для начала вкратце объясню, что это такое. Ниже на фото показан фабричный слайдер.
Слайдер предназначен для видеосъемки на фотоаппараты и видеокамеры.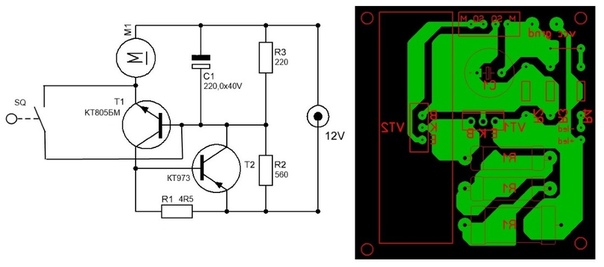 Он являются аналогом рельсовой системы, которая используется в широкоформатном кино. С его помощью создается плавное перемещение камеры вокруг снимаемого объекта. Другим очень сильным эффектом, который можно использовать при работе со слайдером, – это возможность приблизиться или удалиться от объекта съемки. На следующем фото изображен двигатель, который выбрал для изготовления слайдера.
Он являются аналогом рельсовой системы, которая используется в широкоформатном кино. С его помощью создается плавное перемещение камеры вокруг снимаемого объекта. Другим очень сильным эффектом, который можно использовать при работе со слайдером, – это возможность приблизиться или удалиться от объекта съемки. На следующем фото изображен двигатель, который выбрал для изготовления слайдера.
В качестве привода слайдера используется двигатель постоянного тока с питанием 12 вольт. В интернете была найдена схема регулятора для двигателя, который перемещает каретку слайдера. На следующем фото индикатор включения на светодиоде, тумблер, управляющий реверсом и выключатель питания.
При работе такого устройства важно, чтоб была плавная регулировка скорости, плюс легкое включение реверса двигателя. Скорость вращения вала двигателя, в случае применения нашего регулятора, плавно регулируется вращением ручки переменного резистора на 5 кОм. Возможно, не только я один из пользователей этого сайта увлекаюсь фотографией, и кто-то ещё захочет повторить это устройство, желающие могут скачать в конце статьи архив со схемой и печатной платой регулятора.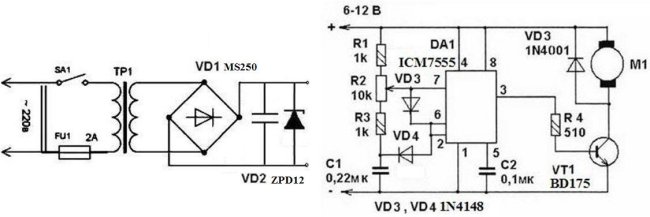 На следующем рисунке приведена принципиальная схема регулятора для двигателя:
На следующем рисунке приведена принципиальная схема регулятора для двигателя:
Схема регулятора
Схема очень простая и может быть легко собрана даже начинающими радиолюбителями. Из плюсов сборки этого устройства могу назвать его низкую себестоимость и возможность подогнать под нужные потребности. На рисунке приведена печатная плата регулятора:
Но область применения данного регулятора не ограничивается одними слайдерами, его легко можно применить в качестве регулятора оборотов, например бор машинки, самодельного дремеля, с питанием от 12 вольт, либо компьютерного кулера, например, размерами 80 х 80 или 120 х 120 мм. Также мною была разработана схема реверса двигателя, или говоря другими словами, быстрой смены вращения вала в другую сторону. Для этого использовал шестиконтактный тумблер на 2 положения. На следующем рисунке изображена схема его подключения:
Средние контакты тумблера, обозначенные (+) и (-) подключают к контактам на плате обозначенным М1. 1 и М1.2, полярность не имеет значения. Всем известно, что компьютерные кулеры, при снижении напряжения питания и, соответственно, оборотов, издают в работе намного меньший шум. На следующем фото, транзистор КТ805АМ на радиаторе:
1 и М1.2, полярность не имеет значения. Всем известно, что компьютерные кулеры, при снижении напряжения питания и, соответственно, оборотов, издают в работе намного меньший шум. На следующем фото, транзистор КТ805АМ на радиаторе:
В схеме можно использовать почти любой транзистор средней и большой мощности n-p-n структуры. Диод также можно заменить на подходящие по току аналоги, например 1N4001, 1N4007 и другие. Выводы двигателя зашунтированы диодом в обратном включении, это было сделано для защиты транзистора в моменты включения — отключения схемы, так как двигатель у нас нагрузка индуктивная. Также, в схеме предусмотрена индикация включения слайдера на светодиоде, включенном последовательно с резистором.
При использовании двигателя большей мощности, чем изображен на фото, транзистор для улучшения охлаждения нужно прикрепить к радиатору. Фото получившейся платы приведено ниже:
Плата регулятора была изготовлена методом ЛУТ. Увидеть, что получилось в итоге, можно на видеоролике.
Видео работы
В скором времени, как будут приобретены недостающие части, в основном механика, приступлю к сборке устройства в корпусе. Статью прислал Алексей Cитков .
Для плавности увеличения и уменьшения скорости вращения вала существует специальный прибор –регулятор оборотов электродвигателя 220в. Стабильная эксплуатация, отсутствие перебоев напряжения, долгий срок службы – преимущества использования регулятора оборотов двигателя на 220, 12 и 24 вольт.
- Для чего нужен частотный преобразователь оборотов
- Область применения
- Выбираем устройство
- Устройство ПЧ
- Виды устройств
- Процесс пропорциональных сигналов
Функция регулятора в инвертировании напряжения 12, 24 вольт, обеспечение плавности пуска и остановки с использованием широтно-импульсной модуляции.
Контроллеры оборотов входят в структуру многих приборов, так как они обеспечивают точность электрического управления.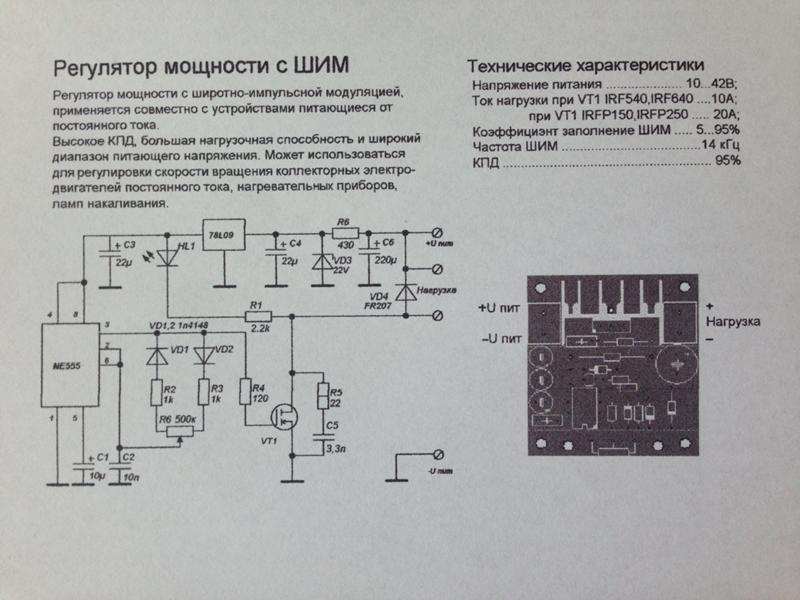 Это позволяет регулировать обороты в нужную величину.
Это позволяет регулировать обороты в нужную величину.
Регулятор оборотов двигателя постоянного тока используется во многих промышленных и бытовых областях. Например:
- отопительный комплекс;
- приводы оборудования;
- сварочный аппарат;
- электрические печи;
- пылесосы;
- швейные машинки;
- стиральные машины.
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате. А лучше превышать для безопасной работы системы.
- Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.
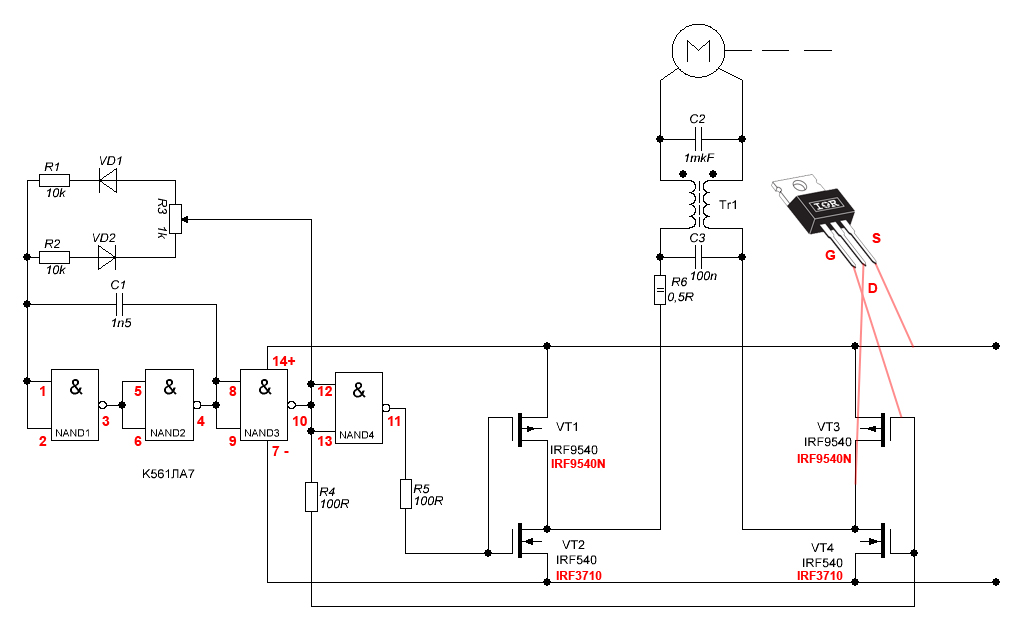
- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
- двигатель переменного тока природный контроллер;
- привод;
- дополнительные элементы.
Схема контроллера оборотов вращения двигателя 12 в изображена на рисунке. Обороты регулируются с помощью потенциометра. Если на вход поступают импульсы с частотой 8 кГц, то напряжение питания будет 12 вольт.
Прибор может быть куплен в специализированных точках продажи, а можно сделать самому.
Схема регулятора оборотов вращения переменного тока
При пуске трехфазного двигателя на всю мощность, передаётся ток, действие повторяется около 7 раз. Сила тока сгибает обмотки двигателя, образуется тепло, на протяжении долгого времени. Преобразователь представляет собой инвертор, обеспечивающий превращение энергии. Напряжение поступает в регулятор, где происходит выпрямления 220 вольт с помощью диода, расположенного на входе. Затем происходит фильтрация тока посредством 2 конденсатора. Образуется ШИМ. Далее импульсный сигнал передаётся от обмоток двигателя к определённой синусоиде.
Образуется ШИМ. Далее импульсный сигнал передаётся от обмоток двигателя к определённой синусоиде.
Существует универсальный прибор 12в для бесколлекторных двигателей.
Для экономии на платежах за электроэнергию наши читатели советуют «Экономитель энергии Electricity Saving Box». Ежемесячные платежи станут на 30-50% меньше, чем были до использования экономителя. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.
Схема состоит из двух частей–логической и силовой. Микроконтроллер расположен на микросхеме. Эта схема характерна для мощного двигателя. Уникальность регулятора заключается в применении с различными видами двигателей. Питание схем раздельное, драйверам ключей требуется питание 12В.
Виды устройств Прибор триакУстройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.

Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Преобразователи на электронных ключахРаспространённые регулятор тиристор, обладающие простой схемой работы.
Тиристор, работает в сети переменного тока.
Отдельным видом является стабилизатор напряжения переменного тока. Стабилизатор содержит трансформатор с многочисленными обмотками.
Схема стабилизатора постоянного тока
Зарядное устройство 24 вольт на тиристоре
К источнику напряжения 24 вольт.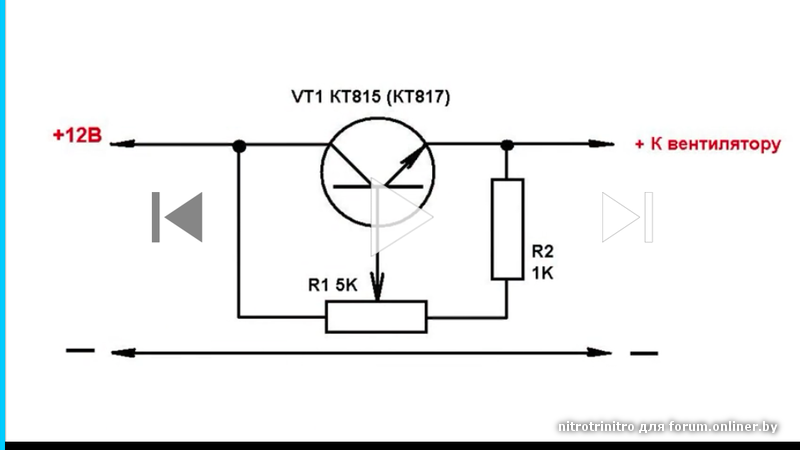 Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Сигналы, поступающие на вход системы, образуют обратную связь. Подробнее рассмотрим с помощью микросхемы.
Микросхема TDA 1085
Микросхема TDA 1085, изображенная выше, обеспечивает управление электродвигателем 12в, 24в обратной связью без потерь мощности. Обязательным является содержание таходатчика, обеспечивающего обратную связь двигателя с платой регулирования. Сигнал стаходатчика идёт на микросхему, которая передаёт силовым элементам задачу – добавить напряжение на мотор. При нагрузке на вал, плата прибавляет напряжение, а мощность увеличивается. Отпуская вал, напряжение уменьшается. Обороты будут постоянными, а силовой момент не изменится. Частота управляется в большом диапазоне. Такой двигатель 12, 24 вольт устанавливается в стиральные машины.
Своими руками можно сделать прибор для гриндера, токарного станка по дереву, точила, бетономешалки, соломорезки, газонокосилки, дровокола и многого другого.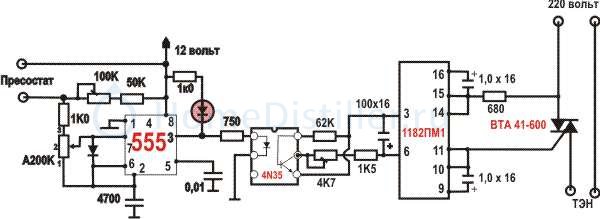
Промышленные регуляторы, состоящие из контроллеров 12, 24 вольт, заливаются смолой, поэтому ремонту не подлежат. Поэтому часто изготавливается прибор 12в самостоятельно. Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
При сборе регулятора правильно выбирать резистор. Так как при большом резисторе, на старте могут быть рывки, а при маленьком резисторе компенсация будет недостаточной.
Важно! При регулировке контроллера мощности нужно помнить, что все детали устройства подключены к сети переменного тока, поэтому необходимо соблюдать меры безопасности!
Регуляторы оборотов вращения однофазных и трехфазных двигателей 24, 12 вольт представляют собой функциональное и ценное устройство, как в быту, так и в промышленности.
На простых механизмах удобно устанавливать аналоговые регуляторы тока. К примеру, они могут изменить скорость вращения вала мотора. С технической стороны выполнить такой регулятор просто (потребуется установка одного транзистора). Применим для регулировки независимой скорости моторов в робототехнике и источниках питания. Наиболее распространены два варианта регуляторов: одноканальные и двухканальные.
К примеру, они могут изменить скорость вращения вала мотора. С технической стороны выполнить такой регулятор просто (потребуется установка одного транзистора). Применим для регулировки независимой скорости моторов в робототехнике и источниках питания. Наиболее распространены два варианта регуляторов: одноканальные и двухканальные.
Видео №1. Одноканальный регулятор в работе. Меняет скорость кручения вала мотора посредством вращения ручки переменного резистора.
Видео №2. Увеличение скорости кручения вала мотора при работе одноканального регулятора. Рост числа оборотов от минимального до максимального значения при вращении ручки переменного резистора.
Видео №3. Двухканальный регулятор в работе. Независимая установка скорости кручения валов моторов на базе подстроечных резисторов.
Видео №4. Напряжение на выходе регулятора измерено цифровым мультиметром. Полученное значение равно напряжению батарейки, от которого отняли 0,6 вольт (разница возникает из-за падения напряжения на переходе транзистора). При использовании батарейки в 9,55 вольт, фиксируется изменение от 0 до 8,9 вольт.
При использовании батарейки в 9,55 вольт, фиксируется изменение от 0 до 8,9 вольт.
Функции и основные характеристики
Ток нагрузки одноканального (фото. 1) и двухканального (фото. 2) регуляторов не превышает 1,5 А. Поэтому для повышения нагрузочной способности производят замену транзистора КТ815А на КТ972А. Нумерация выводов для этих транзисторов совпадает (э-к-б). Но модель КТ972А работоспособна с токами до 4А.
Одноканальный регулятор для мотора
Устройство управляет одним мотором, питание осуществляется от напряжения в диапазоне от 2 до 12 вольт.
Конструкция устройства
Основные элементы конструкции регулятора представлены на фото. 3. Устройство состоит из пяти компонентов: два резистор переменного сопротивления с сопротивлением 10 кОм (№1) и 1 кОм (№2), транзистор модели КТ815А (№3), пара двухсекционных винтовых клеммника на выход для подключения мотора (№4) и вход для подключения батарейки (№5).
Примечание 1.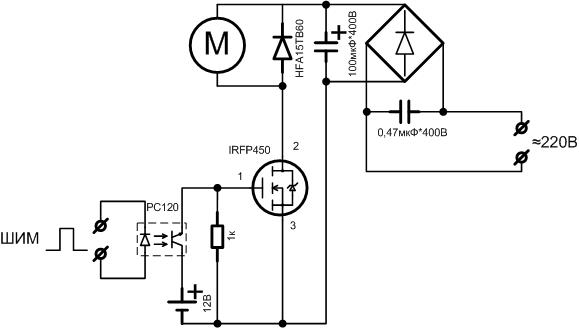 Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Принцип работы
Порядок работы регулятора мотора описывает электросхема (рис. 1). С учетом полярности на разъем ХТ1 подают постоянное напряжение. Лампочку или мотор подключают к разъему ХТ2. На входе включают переменный резистор R1, вращение его ручки изменяет потенциал на среднем выходе в противовес минусу батарейки. Через токоограничитель R2 произведено подключение среднего выхода к базовому выводу транзистора VT1. При этом транзистор включен по схеме регулярного тока. Положительный потенциал на базовом выходе увеличивается при перемещении вверх среднего вывода от плавного вращения ручки переменного резистора. Происходит увеличение тока, которое обусловлено снижением сопротивления перехода коллектор-эмитттер в транзисторе VT1. Потенциал будет уменьшаться, если ситуация будет обратной.
Принципиальная электрическая схема
Материалы и детали
Необходима печатная плата размером 20х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита (допустимая толщина 1-1,5 мм). В таблице 1 приведен список радиокомпонентов.
В таблице 1 приведен список радиокомпонентов.
Примечание 2. Необходимый для устройства переменный резистор может быть любого производства, важно соблюсти для него значения сопротивления тока указанные в таблице 1.
Примечание 3 . Для регулировки токов выше 1,5А транзистор КТ815Г заменяют на более мощный КТ972А (с максимальным током 4А). При этом рисунок печатной платы менять не требуется, так как распределение выводов у обоих транзисторов идентично.
Процесс сборки
Для дальнейшей работы нужно скачать архивный файл, размещенный в конце статьи, разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора (файл termo1), а монтажный чертеж (файл montag1) – на белом листе офисной (формат А4).
Далее чертеж монтажной платы (№1 на фото. 4) наклеивают к токоведущим дорожкам на противоположной стороне печатной платы (№2 на фото. 4). Необходимо сделать отверстия (№3 на фото. 14) на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпадать. На фото.5 показана цоколёвка транзистора КТ815.
На фото.5 показана цоколёвка транзистора КТ815.
Вход и выход клеммников-разъемов маркируют белым цветом. Через клипсу к клеммнику подключается источник напряжения. Полностью собранный одноканальный регулятор отображен на фото. Источник питания (батарея 9 вольт) подключается на финальном этапе сборки. Теперь можно регулировать скорость вращения вала с помощью мотора, для этого нужно плавно вращать ручку регулировки переменного резистора.
Для тестирования устройства необходимо из архива распечатать чертеж диска. Далее нужно наклеить этот чертеж (№1) на плотную и тонкую картонную бумагу (№2). Затем с помощью ножниц вырезается диск (№3).
Полученную заготовку переворачивают (№1) и к центру крепят квадрат черной изоленты (№2) для лучшего сцепления поверхности вала мотора с диском. Нужно сделать отверстие (№3) как указано на изображении. Затем диск устанавливают на вал мотора и можно приступать к испытаниям. Одноканальный регулятор мотора готов!
Двухканальный регулятор для мотора
Используется для независимого управления парой моторов одновременно.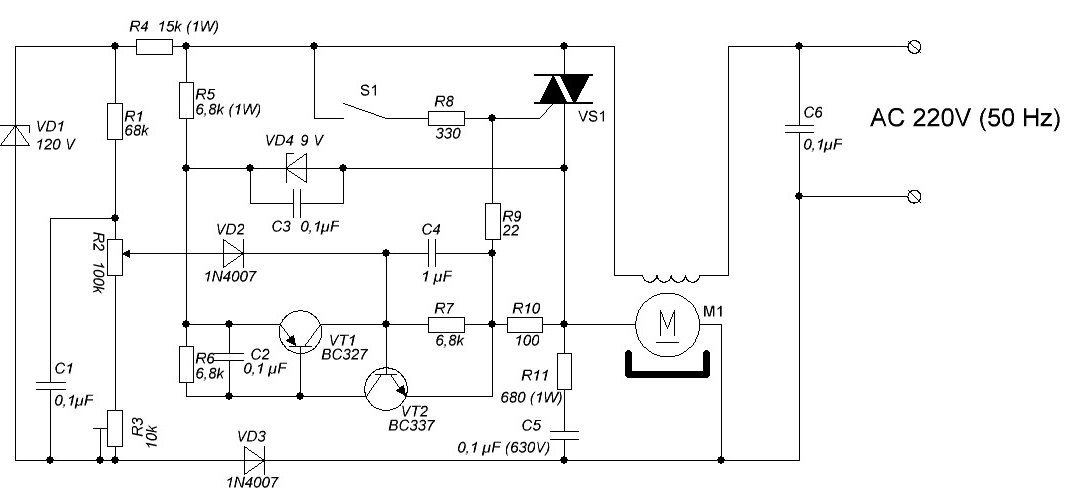 Питание осуществляется от напряжения в диапазоне от 2 до 12 вольт. Ток нагрузки рассчитан до 1,5А на каждый канал.
Питание осуществляется от напряжения в диапазоне от 2 до 12 вольт. Ток нагрузки рассчитан до 1,5А на каждый канал.
Основные компоненты конструкции представлены на фото.10 и включают: два подстроечных резистора для регулировки 2-го канала (№1) и 1-го канала (№2), три двухсекционных винтовых клеммника для выхода на 2-ой мотор (№3), для выхода на 1-ый мотор (№4) и для входа (№5).
Примечание.1 Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Принцип работы
Схема двухканального регулятора идентична электрической схеме одноканального регулятора. Состоит из двух частей (рис.2). Основное отличие: резистор переменного сопротивления замен на подстроечный резистор. Скорость вращения валов устанавливается заранее.
Примечание.2. Для оперативной регулировки скорости кручения моторов подстроечные резисторы заменяют с помощью монтажного провода с резисторами переменного сопротивления с показателями сопротивлений, указанными на схеме.
Материалы и детали
Понадобится печатная плата размером 30х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита толщиной 1-1,5 мм. В таблице 2 приведен список радиокомпонентов.
Процесс сборки
После скачивания архивного файла, размещенного в конце статьи, нужно разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора для термоперевода (файл termo2), а монтажный чертеж (файл montag2) – на белом листе офисной (формат А4).
Чертеж монтажной платы наклеивают к токоведущим дорожкам на противоположной стороне печатной платы. Формируют отверстия на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпасть. Производится цоколёвка транзистора КТ815. Для проверки нужно временно соединить монтажным проводом входы 1 и 2 .
Любой из входов подключают к полюсу источника питания (в примере показана батарейка 9 вольт). Минус источника питания при этом крепят к центру клеммника.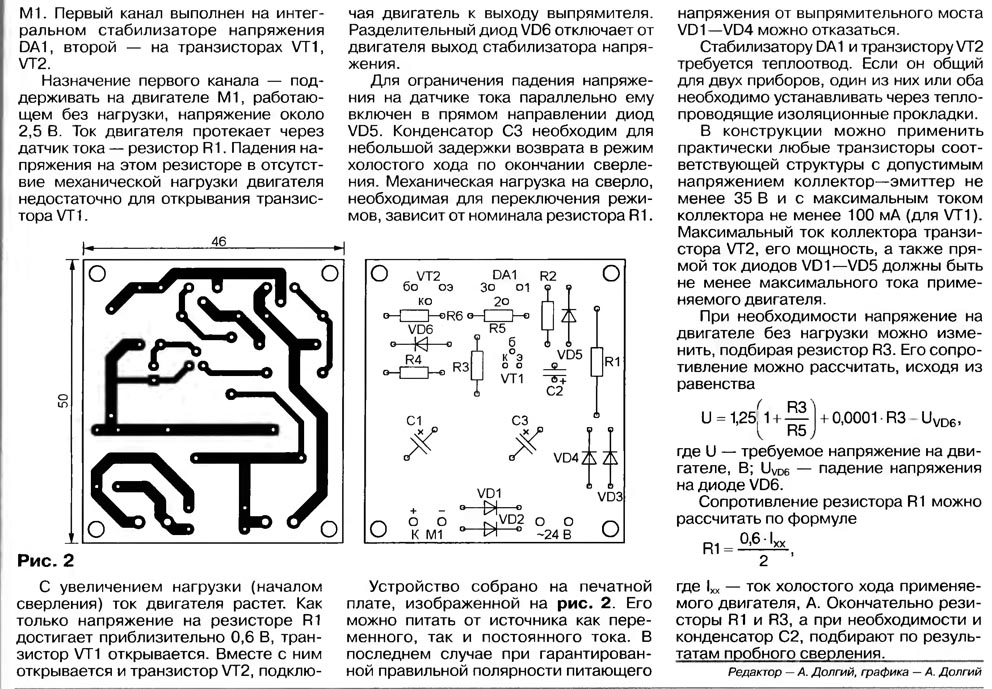 Важно помнить: черный провод «-», а красный «+».
Важно помнить: черный провод «-», а красный «+».
Моторы должны быть подключены к двум клеммникам, также необходимо установить нужную скорость. После успешных испытаний нужно удалить временное соединение входов и установить устройство на модель робота. Двухканальный регулятор мотора готов!
В АРХИВЕ представленные необходимые схемы и чертежи для работы. Эмиттеры транзисторов помечены красными стрелками.
Схема регулятора оборотов двигателя постоянного тока работает на принципах широтно-импульсной модуляции и применяется для изменения оборотов двигателя постоянного тока на 12 вольт. Регулирование частоты вращения вала двигателя при помощи широтно-импульсной модуляции дает больший КПД, чем при применение простого изменения постоянного напряжения подаваемого на двигатель, хотя эти схемы мы тоже рассмотрим
Регулятор оборотов двигателя постоянного тока схема на 12 вольт
Двигатель подключен в цепь к полевому транзистору который управляется широтно-импульсной модуляцией осуществляемой на микросхеме таймере NE555, поэтому и схема получилась такой простой.
ШИМ регулятор реализован с помощью обычного генератора импульсов на нестабильном мультивибраторе, генерирующий импульсы с частотой следования 50 Гц и построенного на популярном таймере NE555. Сигналы поступающие с мультивибратора создают поле смещения на затворе полевого транзистора. Длительность положительного импульса настраивается при помощи переменного сопротивления R2. Чем выше длительность положительного импульса поступающего на затвор полевого транзистора, тем большая мощность подается на электродвигатель постоянного тока. И на оборот чем меньше длительность импульса, тем слабее вращается электродвигатель. Эта схема прекрасно работает от аккумуляторной батареи на 12 вольт.
Регулирование оборотов двигателя постоянного тока схема на 6 вольт
Скорость 6 вольтового моторчика можно регулируется в пределах 5-95%
Регулятор оборотов двигателя на PIC-контроллере
Регулировка оборотов в этой схеме достигается подачей на электромотор импульсов напряжения, различной длительности. Для этих целей используются ШИМ (широтно-импульсные модуляторы). В данном случае широтно-импульсное регулирование обеспечивается микроконтроллер PIC. Для управления скоростью вращения двигателя используются две кнопки SB1 и SB2, «Больше» и «Меньше». Изменять скорость вращенияможно только при нажатом тумблере «Пуск». Длительность импульса при этом изменяется, в процентном отношении к периоду, от 30 — 100%.
В качестве стабилизатора напряжения микроконтроллера PIC16F628A, используется трехвыводной стабилизатор КР1158ЕН5В, имеющий низкое падение напряжение «вход-выход», всего около 0,6В. Максимальное входное напряжение – 30В. Все это позволяет применять двигатели с напряжением от 6В до 27В. В роли силового ключа используется составной транзистор КТ829А который желательно установить на радиатор.
Устройство собрано на печатной плате размерами 61 х 52мм. Скачать рисунок печатной платы и файл прошивки можно по ссылке выше. (Смотри в архиве папку 027-el )
Эта самодельная схема может быть использована в качестве регулятора скорости для двигателя постоянного тока 12 В с номинальным током до 5 А или как диммер для 12 В галогенных и светодиодных ламп мощностью до 50 Вт. Управление идёт с помощью широтно-импульсной модуляции (ШИМ) при частоте следования импульсов около 200 Гц. Естественно частоту можно при необходимости изменить, подобрав по максимальной стабильности и КПД.
Большинство подобных конструкций собирается по гораздо . Здесь же представляем более усовершенствованный вариант, который использует таймер 7555, драйвер на биполярных транзисторах и мощный полевой MOSFET. Такая схематика обеспечивает улучшенное регулирование скорости и работает в широком диапазоне нагрузки. Это действительно очень эффективная схема и стоимость её деталей при покупке для самостоятельной сборки довольно низкая.
В схеме используется Таймер 7555 для создания переменной ширины импульсов около 200 Гц. Он управляет транзистором Q3 (через транзисторы Q1 – Q2), который контролирует скорость электро двигателя или ламп освещения.
Есть много применений для этой схемы, которые будут питаться от 12 В: электродвигатели, вентиляторы или лампы. Использовать её можно в автомобилях, лодках и электротранспортных средствах, в моделях железных дорог и так далее.
Светодиодные лампы на 12 В, например LED ленты, тоже можно смело сюда подключать. Все знают, что светодиодные лампы гораздо более эффективны, чем галогенные или накаливания, они прослужит намного дольше. А если надо – питайте ШИМ-контроллер от 24 и более вольт, так как сама микросхема с буферным каскадом имеют стабилизатор питания.
Во многих электронных схемах используются системы активного охлаждения с вентиляторами. Чаще всего их моторы управляются микроконтроллером или другой специализированной микросхемой, а скорость вращения регулируется с помощью ШИМ. Такое решение характеризуется не слишком хорошей плавностью работы, может привести к нестабильной работе вентилятора, а кроме того, создает много помех.
Для потребностей высококачественной аудиотехники разработан аналоговый регулятор оборотов вентилятора. Схема пригодится при строительстве усилителей НЧ с активной системой охлаждения и позволяет выполнить плавную регулировку оборотов вентиляторов в зависимости от температуры. Производительность и мощность зависит в основном от выходного транзистора, тесты проводились с выходными токами до 2 А, что позволяет подключить даже несколько больших вентиляторов на 12 В. Естественно можно применить это устройство и для управления обычными моторами постоянного тока, при необходимости повысив питающее напряжение. Хотя для совсем уже мощных двигателей придётся задействовать системы плавного пуска tehprivod.su/katalog/ustroystva-plavnogo-puska
Принципиальная схема регулятора оборотов мотора
Схема состоит из двух частей: дифференциального усилителя и стабилизатора напряжения. Первая часть занимается измерением температуры и обеспечивает напряжение, пропорциональное температуре, когда она превышает установленный порог. Это напряжение является управляющим для стабилизатора напряжения, выход которого контролирует питание вентиляторов.
Схема регулятора оборотов электродвигателя постоянного тока приведена на рисунке. Основа – компаратор U2 (LM393), работающий в этой конфигурации как обычный операционный усилитель. Первая его часть U2A работает как усилитель дифференциальный, чьи условия работы определяют резисторы R4-R5 (47k) и R6-R7 (220k). Конденсатор C10 (22pF) улучшает стабильность усилителя, а R12 (10k) подтягивает выход компаратора к плюсу питания.
На один из входов дифференциального усилителя подается напряжение, которое образуется через делитель, состоящий из R2 (6,8k), R3 (680 Ом) и PR1 (500 Ом), и фильтруется с помощью C4 (100nF). На второй вход этого усилителя поступает напряжение с датчика температуры, который в данном случае один из разъемов транзистора T1 (BD139), поляризованный небольшим током с помощью R1 (6,8k).
Конденсатор C2 (100nF) был добавлен, чтобы фильтровать напряжение с датчика температуры. Полярность датчика и делителя опорного напряжения задает стабилизатор U1 (78L05) вместе с конденсаторами C1 (1000uF/16V), C3 (100nF) и C5 (47uF/25V), предоставляя стабилизированное напряжение 5 В.
Компаратор U2B работает как классический усилитель ошибки. Он сравнивает напряжение с выхода дифференциального усилителя с выходным напряжением с помощью цепочки R10 (3,3k), R11 (47 Ом) и PR2 (200 Ом). Исполнительным элементом стабилизатора является транзистор T2 (IRF5305), база которого управляется делителем R8 (10k) и R9 (5,1k).
Конденсатор C6 (1uF) и C7 (22pF) и C9 (10nF) улучшают стабильность петли обратной связи. Конденсатор C8 (1000uF/16V) фильтрует выходное напряжение, он имеет значительное влияние на стабильность системы. Разъемом выхода – AR2 (TB2), а разъем питания – AR1 (TB2).
Благодаря применению выходного транзистора с низким сопротивлением в открытом состоянии, схема обладает очень малым падением напряжения – порядка 50 мВ при выходном токе 1 А, что не требует блока питания с более высоким напряжением для управления вентиляторами, работающие на 12 В.
В большинстве случаев в роли U2 можно применить популярный операционный усилитель LM358, правда несколько ухудшив выходные параметры.
Сборка регулятора
Монтаж следует начинать с установки двух перемычек, затем должны быть установлены все резисторы и мелкие керамические конденсаторы.
В большинстве случаев оба эти элемента будут установлены снизу платы на ножках, изогнутых под углом 90 градусов. Такая укладка позволит их прикрутить непосредственно к радиатору (обязательно использовать изоляционные прокладки).
Обсудить статью РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ 12 В
Подборка схем регулятора оборотов двигателя постоянного тока
Производить регулировку скорости вращения вала коллекторного электродвигателя, имеющего малую мощность, можно подсоединяя последовательно в электроцепь его питания резистор. Но данный вариант создает очень низкий КПД, и к тому же отсутствует возможность осуществлять плавное изменение скорости вращения.
Основное, что этот способ временами приводит к полной остановке электродвигателя при низком напряжении питания. Регулятор оборотов электродвигателя постоянного тока, описанные в данной статье, не имеют эти недостатки. Данные схемы можно с успехом применять и для изменения яркости свечения ламп накаливания на 12 вольт.
Описание 4 схем регуляторов оборотов электродвигателя
Первая схема
На транзисторе VT1 (однопереходном) реализован генератор пилообразного напряжения (частота 150 Гц). Операционный усилитель DA1 играет роль компаратора, создающего ШИМ на базе транзистора VT2. В результате получается ШИМ регулятор оборотов двигателя.
Изменяют скорость вращения переменным резистором R5, который меняет длительность импульсов. Так как, амплитуда ШИМ импульсов постоянна и равна напряжению питания электродвигателя, то он никогда не останавливается даже при очень малой скорости вращения.
Вторая схема
Она схожа с предыдущей, но в роли задающего генератора применен операционный усилитель DA1 (К140УД7).
Этот ОУ функционирует как генератор напряжения вырабатывающий импульсы треугольной формы и имеющий частоту 500 Гц. Переменным резистором R7 выставляют частоту вращения электродвигателя.
Третья схема
Она своеобразная, построена на она на популярном таймере NE555. Задающий генератор действует с частотой 500 Гц. Ширина импульсов, а следовательно, и частоту вращения двигателя возможно изменять от 2 % до 98 %.
Слабым местом во всех вышеприведенных схемах является, то что в них нет элемента стабилизации частоты вращения при увеличении или уменьшении нагрузки на валу двигателя постоянного тока. Разрешить эту проблему можно с помощью следующей схемы:
Как и большинство похожих регуляторов, схема этого регулятора имеет задающий генератор напряжения, вырабатывающий импульсы треугольной формы, частота которых 2 кГц. Вся специфика схемы — присутствие положительной обратной связи (ПОС) сквозь элементы R12,R11,VD1,C2, DA1.4, стабилизирующей частоту вращения вала электродвигателя при увеличении или уменьшении нагрузки.
При налаживании схемы с определенным двигателем, сопротивлением R12 выбирают такую глубину ПОС, при которой еще не случаются автоколебания частоты вращения при изменении нагрузки.
Детали регуляторов вращения электродвигателей
В данных схемах возможно применить следующие замены радиодеталей: транзистор КТ817Б — КТ815, КТ805; КТ117А возможно поменять КТ117Б-Г или 2N2646; Операционный усилитель К140УД7 на К140УД6, КР544УД1, ТL071, TL081; таймер NE555 — С555, КР1006ВИ1; микросхему TL074 — TL064, TL084, LM324.
При использовании более мощной нагрузки, ключевой транзистор КТ817 возможно поменять мощным полевым транзистором, например, IRF3905 или ему подобный.
Радиоаматор, 4/2008
Самодельный вариатор скорости вращения электродвигателя – Регулятор оборотов электродвигателя 12в своими руками
Эта самодельная схема может быть использована в качестве регулятора скорости для двигателя постоянного тока 12 В с номинальным током до 5 А или как диммер для 12 В галогенных и светодиодных ламп мощностью до 50 Вт. Управление идёт с помощью широтно-импульсной модуляции (ШИМ) при частоте следования импульсов около 200 Гц. Естественно частоту можно при необходимости изменить, подобрав по максимальной стабильности и КПД.
Схема ШИМ регулятора для мотора 12 В
В схеме используется Таймер 7555 для создания переменной ширины импульсов около 200 Гц. Он управляет транзистором Q3 (через транзисторы Q1 — Q2), который контролирует скорость электро двигателя или ламп освещения.
Похожие новости
ШИМ контроллер на 12 вольт Схема регулятора оборотов минидрелиВсем привет, наверно многие радиолюбители, также как и я, имеют не одно хобби, а несколько. Помимо конструирования электронных устройств занимаюсь фотографией, съемкой видео на DSLR камеру, и видео монтажом. Мне, как видеографу, был необходим слайдер для видео съемки, и для начала вкратце объясню, что это такое. Ниже на фото показан фабричный слайдер.
Слайдер предназначен для видеосъемки на фотоаппараты и видеокамеры. Он являются аналогом рельсовой системы, которая используется в широкоформатном кино. С его помощью создается плавное перемещение камеры вокруг снимаемого объекта. Другим очень сильным эффектом, который можно использовать при работе со слайдером, — это возможность приблизиться или удалиться от объекта съемки. На следующем фото изображен двигатель, который выбрал для изготовления слайдера.
В качестве привода слайдера используется двигатель постоянного тока с питанием 12 вольт. В интернете была найдена схема регулятора для двигателя, который перемещает каретку слайдера. На следующем фото индикатор включения на светодиоде, тумблер, управляющий реверсом и выключатель питания.
При работе такого устройства важно, чтоб была плавная регулировка скорости, плюс легкое включение реверса двигателя. Скорость вращения вала двигателя, в случае применения нашего регулятора, плавно регулируется вращением ручки переменного резистора на 5 кОм. Возможно, не только я один из пользователей этого сайта увлекаюсь фотографией, и кто-то ещё захочет повторить это устройство, желающие могут скачать в конце статьи архив со схемой и печатной платой регулятора. На следующем рисунке приведена принципиальная схема регулятора для двигателя:
Видео работы
Для плавности увеличения и уменьшения скорости вращения вала существует специальный прибор —регулятор оборотов электродвигателя 220в. Стабильная эксплуатация, отсутствие перебоев напряжения, долгий срок службы — преимущества использования регулятора оборотов двигателя на 220, 12 и 24 вольт.
Для чего нужен частотный преобразователь оборотовКонтроллеры оборотов входят в структуру многих приборов, так как они обеспечивают точность электрического управления. Это позволяет регулировать обороты в нужную величину.
Регулятор оборотов двигателя постоянного тока используется во многих промышленных и бытовых областях. Например:
Выбираем устройство- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате. А лучше превышать для безопасной работы системы.
- Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.
- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
- двигатель переменного тока природный контроллер;
- привод;
- дополнительные элементы.
Прибор может быть куплен в специализированных точках продажи, а можно сделать самому.
Схема регулятора оборотов вращения переменного тока
Существует универсальный прибор 12в для бесколлекторных двигателей.
Для экономии на платежах за электроэнергию наши читатели советуют «Экономитель энергии Electricity Saving Box». Ежемесячные платежи станут на 30-50% меньше, чем были до использования экономителя. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.
Схема состоит из двух частей—логической и силовой. Микроконтроллер расположен на микросхеме. Эта схема характерна для мощного двигателя. Уникальность регулятора заключается в применении с различными видами двигателей. Питание схем раздельное, драйверам ключей требуется питание 12В.
Прибор триак Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 — конденсатор, R1 — первый резистор, R2 — второй резистор.Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Распространённые регулятор тиристор, обладающие простой схемой работы.
Тиристор, работает в сети переменного тока.
К источнику напряжения 24 вольт. Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Сигналы, поступающие на вход системы, образуют обратную связь. Подробнее рассмотрим с помощью микросхемы.
Микросхема TDA 1085
Своими руками можно сделать прибор для гриндера, токарного станка по дереву, точила, бетономешалки, соломорезки, газонокосилки, дровокола и многого другого.
При сборе регулятора правильно выбирать резистор. Так как при большом резисторе, на старте могут быть рывки, а при маленьком резисторе компенсация будет недостаточной.
Регуляторы оборотов вращения однофазных и трехфазных двигателей 24, 12 вольт представляют собой функциональное и ценное устройство, как в быту, так и в промышленности.
Видео № 1. Одноканальный регулятор в работе. Меняет скорость кручения вала мотора посредством вращения ручки переменного резистора.
Видео № 3. Двухканальный регулятор в работе. Независимая установка скорости кручения валов моторов на базе подстроечных резисторов.
Функции и основные характеристики
Одноканальный регулятор для мотора
Конструкция устройства
Принцип работы
Материалы и детали
Примечание 3. Для регулировки токов выше 1,5А транзистор КТ815Г заменяют на более мощный КТ972А (с максимальным током 4А). При этом рисунок печатной платы менять не требуется, так как распределение выводов у обоих транзисторов идентично.
Для дальнейшей работы нужно скачать архивный файл, размещенный в конце статьи, разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора (файл termo1 ), а монтажный чертеж (файл montag1 ) — на белом листе офисной (формат А4).
Для тестирования устройства необходимо из архива распечатать чертеж диска. Далее нужно наклеить этот чертеж (№ 1) на плотную и тонкую картонную бумагу (№ 2 ). Затем с помощью ножниц вырезается диск (№ 3).
Полученную заготовку переворачивают (№ 1 ) и к центру крепят квадрат черной изоленты (№ 2) для лучшего сцепления поверхности вала мотора с диском. Нужно сделать отверстие (№ 3) как указано на изображении. Затем диск устанавливают на вал мотора и можно приступать к испытаниям. Одноканальный регулятор мотора готов!
Используется для независимого управления парой моторов одновременно. Питание осуществляется от напряжения в диапазоне от 2 до 12 вольт. Ток нагрузки рассчитан до 1,5А на каждый канал.
Принцип работы
Примечание.2. Для оперативной регулировки скорости кручения моторов подстроечные резисторы заменяют с помощью монтажного провода с резисторами переменного сопротивления с показателями сопротивлений, указанными на схеме.
Понадобится печатная плата размером 30×30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита толщиной 1-1,5 мм. В таблице 2 приведен список радиокомпонентов.
Процесс сборки
Чертеж монтажной платы наклеивают к токоведущим дорожкам на противоположной стороне печатной платы. Формируют отверстия на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпасть. Производится цоколёвка транзистора КТ815. Для проверки нужно временно соединить монтажным проводом входы 1 и 2 .
В АРХИВЕ представленные необходимые схемы и чертежи для работы. Эмиттеры транзисторов помечены красными стрелками.
Регулятор оборотов двигателя постоянного тока схема на 12 вольт
Двигатель подключен в цепь к полевому транзистору который управляется широтно-импульсной модуляцией осуществляемой на микросхеме таймере NE555, поэтому и схема получилась такой простой.
ШИМ регулятор реализован с помощью обычного генератора импульсов на нестабильном мультивибраторе, генерирующий импульсы с частотой следования 50 Гц и построенного на популярном таймере NE555. Сигналы поступающие с мультивибратора создают поле смещения на затворе полевого транзистора. Длительность положительного импульса настраивается при помощи переменного сопротивления R2. Чем выше длительность положительного импульса поступающего на затвор полевого транзистора, тем большая мощность подается на электродвигатель постоянного тока. И на оборот чем меньше длительность импульса, тем слабее вращается электродвигатель. Эта схема прекрасно работает от аккумуляторной батареи на 12 вольт.
Регулирование оборотов двигателя постоянного тока схема на 6 вольт
Регулировка оборотов в этой схеме достигается подачей на электромотор импульсов напряжения, различной длительности. Для этих целей используются ШИМ (широтно-импульсные модуляторы). В данном случае широтно-импульсное регулирование обеспечивается микроконтроллер PIC. Для управления скоростью вращения двигателя используются две кнопки SB1 и SB2, «Больше» и «Меньше». Изменять скорость вращенияможно только при нажатом тумблере «Пуск». Длительность импульса при этом изменяется, в процентном отношении к периоду, от 30 — 100%.
Устройство собрано на печатной плате размерами 61×52мм. Скачать рисунок печатной платы и файл прошивки можно по ссылке выше. (Смотри в архиве папку 027-el )
| RC Design / Статьи / Аппаратура Радиоуправления Автор — Сергей Потупчик (serj)
|
Регулировка скорости двигателя постоянного тока 12в. Мощный шим регулятор. Принцип работы устройства
На основе мощного симистора BT138-600, можно собрать схему регулятора скорости вращения двигателя переменного тока. Эта схема предназначена для регулирования скорости вращения электродвигателей сверлильных машин, вентиляторов, пылесосов, болгарок и др. Скорость двигателя можно регулировать путем изменения сопротивления потенциометра P1. Параметр P1 определяет фазу запускающего импульса, который открывает симистор. Схема также выполняет функцию стабилизации, которая поддерживает скорость двигателя даже при большой его нагрузке.
Например, когда мотор сверлильного станка тормозит из-за повышенного сопротивления металла, ЭДС двигателя также уменьшается. Это приводит к увеличению напряжения в R2-P1 и C3 вызывая более продолжительное открывание симистора, и скорость соответственно увеличивается.
Регулятор для двигателя постоянного тока
Наиболее простой и популярный метод регулировки скорости вращения электродвигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM ). При этом напряжение питания подается на мотор в виде импульсов. Частота следования импульсов остается постоянной, а их длительность может меняться – так меняется и скорость (мощность).
Для генерации ШИМ сигнала можно взять схему на основе микросхемы NE555. Самая простая схема регулятора оборотов двигателя постоянного тока показана на рисунке:
Здесь VT1 – полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1. Частоту ШИМ сигнала можно рассчитать по формуле:
F = 1.44/(R1*C1) , [Гц]
Где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 290 Гц.
Стоит отметить, что даже современные устройства , в том числе и высокой мощности управления, используют в своей основе именно такие схемы. Естественно с использованием более мощных элементов, выдерживающих большие токи.
Регулятор оборотов в двигателе нужен для совершения плавного разгона и торможения. Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
Устройство системы
Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора.
- Ротор – это часть вращения, статор – это внешний по типу магнит.
- Щётки, которые произведены из графита – это главная часть скользящего контакта, через которую на вращающийся якорь и стоит подавать напряжение.
- Тахогенератор -это устройство, которое производит слежку за характеристикой вращения прибора. Если происходит нарушение в размеренности процесса вращения, то он корректирует поступающий в двигатель уровень напряжения, тем самым делая его наиболее плавным и медленным.
- Статор. Такая деталь может включать в себя не один магнит, а, к примеру, две пары полюсов. Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
Схема регулятора оборотов коллекторного двигателя
В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим , они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
Именно по этой причине частотные преобразователи применяются в нагруженных устройствах. Чем медленнее будет происходить процесс разгона, тем меньшая нагрузка будет совершена на редуктор, а также конвейер. Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Некоторые модели частотных преобразователей совершают питание от однофазового напряжения (оно будет доходить до 220 Вольт), создают из него трехфазовое. Это помогает совершить подключение асинхронного мотора в домашних условиях без применения особо сложных схем и конструкций. При этом потребитель сможет не потерять мощность во время работы с таким прибором.
Зачем используют такой прибор-регулятор
Если говорить про двигатели регуляторов , то обороты нужны:
Схемы, по которым происходит создание частотных преобразователей в электродвигателе, широко используются в большинстве бытовых устройств. Такую систему можно найти в источниках беспроводного питания, сварочных аппаратах, зарядках телефона, блоках питания персонального компьютера и ноутбука, стабилизаторах напряжения, блоках розжига ламп для подсветки современных мониторов, а также ЖК-телевизоров.
Регулятор оборотов электродвигателя 220в
Его можно изготовить совершенно самостоятельно , но для этого нужно будет изучить все возможные технические особенности прибора. По конструкции можно выделить сразу несколько разновидностей главных деталей. А именно:
- Сам электродвигатель.
- Микроконтроллерная система управления блока преобразования.
- Привод и механические детали, которые связаны с работой системы.
Перед самым началом запуска устройства, после подачи определённого напряжения на обмотки, начинается процесс вращения двигателя с максимальным показателем мощности. Именно такая особенность и будет отличать асинхронные устройства от остальных видов. Ко всему прочему происходит прибавление нагрузки от механизмов, которые приводят прибор в движение. В конечном счёте на начальном этапе работы устройства мощность, а также потребляемый ток лишь возрастают до максимальной отметки.
В это время происходит процесс выделения наибольшего количества тепла. Происходит перегрев в обмотках, а также в проводах. Использование частичного преобразования поможет не допустить этого. Если произвести установку плавного пуска, то до максимальной отметки скорости (которая также может регулироваться оборудованием и может быть не 1500 оборотов за минуту, а всего лишь 1000) двигатель начнёт разгоняться не в первый момент работы, а на протяжении последующих 10 секунд (при этом на каждую секунду устройство будет прибавлять по 100−150 оборотов). В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
Как сделать регулятор своими руками
Можно совершенно самостоятельно создать регулятор оборотов электродвигателя около 12 В. Для этого стоит использовать переключатель сразу нескольких положений , а также специальный проволочный резистор. При помощи последнего происходит изменение уровня напряжения питания (а вместе с этим и показателя частоты вращения). Такие же системы можно применять и для совершения асинхронных движений, но они будут менее эффективными.
Ещё много лет назад широко использовались механические регуляторы – они были построены на основе шестеренчатых приводов или же их вариаторов. Но такие устройства считались не очень надёжными. Электронные средства показывали себя в несколько раз лучше, так как они были не такими большими и позволяли совершать настройку более тонкого привода.
Для того чтобы создать регулятор вращения электродвигателя, стоит использовать сразу несколько устройств, которые можно либо купить в любом строительном магазине, либо снять со старых инвенторных устройств. Чтобы совершить процесс регулировки, стоит включить специальную схему переменного резистора . С его помощью происходит процесс изменения амплитуды входящего на резистор сигнала.
Внедрение системы управления
Чтобы значительно улучшить характеристику даже самого простого оборудования, стоит в схему регулятора оборотов двигателя подключить микроконтроллерное управление. Для этого стоит выбрать тот процессор, в котором есть подходящее количество входов и выходов соответственно: для совершения подключения датчиков, кнопок, а также специальных электронных ключей.
Для осуществления экспериментов стоит использовать особенный микроконтроллер AtMega 128 – это наиболее простой в применении и широко используемый контроллер. В свободном использовании можно найти большое число схем с его применением. Чтобы устройство совершало правильную работу, в него стоит записать определённый алгоритм действий – отклики на определённые движения. К примеру, при достижении температуры в 60 градусов Цельсия (замер будет отмечаться на графике самого устройства), должно произойти автоматическое отключение работы устройства.
Регулировка работы
Теперь стоит поговорить о том, как можно осуществить регулировку оборотов в коллекторном двигателе. В связи с тем, что общая скорость вращения мотора может напрямую зависеть от величины подаваемого уровня напряжения, для этого вполне пригодны совершенно любые системы для регулировки, которые могут осуществлять такую функцию.
Стоит перечислить несколько разновидностей приборов:
- Лабораторные автотрансформеры (ЛАТР).
- Заводские платы регулировки, которые применяются в бытовых устройствах (можно взять даже те, которые используются в пылесосах, миксерах).
- Кнопки, которые применяются в конструкции электроинструментов.
- Бытовые разновидности регуляторов, которые оснащены особым плавным действием.
Но при этом все такие способы имеют определённый изъян. Совместно с процессами уменьшения оборотов уменьшается и общая мощность работы мотора. Иногда его можно остановить, даже просто дотронувшись рукой. В некоторых случаях это может быть вполне нормальным, но по большей части это считается серьёзной проблемой.
Наиболее приемлемым вариантом станет выполнение функции регулировки оборотов при помощи применения тахогенератора .
Его чаще всего устанавливают на заводе. Во время отклонения скорости вращения моторов через симистры в моторе будет происходить передача уже откорректированного электропитания, сопутствующего нужной скорости вращения. Если в такую ёмкость будет встроена регулировка вращения самого мотора, то мощность не будет потеряна.
Как же это выглядит в виде конструкции? Больше всего используется именно реостатная регулировка процесса вращения, которая создана на основе применения полупроводника.
В первом случае речь пойдёт о переменном сопротивлении с использованием механического процесса регулировки. Она будет последовательно подключена к коллекторному электродвигателю. Недостатком в этом случае станет дополнительное выделение некоторого количества тепла и дополнительная трата ресурса всего аккумулятора. Во время такой регулировки происходит общая потеря мощности в процессе совершения вращения мотора. Он считается наиболее экономичным вариантом. Не используется для довольно мощных моторов по вышеуказанным причинам.
Во втором случае во время применения полупроводников происходит процесс управления мотором при помощи подачи определённого числа импульсов. Схема способна совершать изменение длительности таких импульсов, что, в свою очередь, будет изменять общую скорость вращения мотора без потери показателя мощности.
Если вы не хотите самостоятельно изготавливать оборудование, а хотите купить уже полностью готовое к применению устройство, то стоит обратить особое внимание на главные параметры и характеристики, такие, как мощность, тип системы управления прибором, напряжение в устройстве, частоту, а также напряжение рабочего типа. Лучше всего будет производить расчёт общих характеристик всего механизма, в котором стоит применять регулятор общего напряжения двигателя. Стоит обязательно помнить, что нужно производить сопоставление с параметрами частотного преобразователя.
Эта самодельная схема может быть использована в качестве регулятора скорости для двигателя постоянного тока 12 В с номинальным током до 5 А или как диммер для 12 В галогенных и светодиодных ламп мощностью до 50 Вт. Управление идёт с помощью широтно-импульсной модуляции (ШИМ) при частоте следования импульсов около 200 Гц. Естественно частоту можно при необходимости изменить, подобрав по максимальной стабильности и КПД.
Большинство подобных конструкций собирается по гораздо . Здесь же представляем более усовершенствованный вариант, который использует таймер 7555, драйвер на биполярных транзисторах и мощный полевой MOSFET. Такая схематика обеспечивает улучшенное регулирование скорости и работает в широком диапазоне нагрузки. Это действительно очень эффективная схема и стоимость её деталей при покупке для самостоятельной сборки довольно низкая.
В схеме используется Таймер 7555 для создания переменной ширины импульсов около 200 Гц. Он управляет транзистором Q3 (через транзисторы Q1 – Q2), который контролирует скорость электро двигателя или ламп освещения.
Есть много применений для этой схемы, которые будут питаться от 12 В: электродвигатели, вентиляторы или лампы. Использовать её можно в автомобилях, лодках и электротранспортных средствах, в моделях железных дорог и так далее.
Светодиодные лампы на 12 В, например LED ленты, тоже можно смело сюда подключать. Все знают, что светодиодные лампы гораздо более эффективны, чем галогенные или накаливания, они прослужит намного дольше. А если надо – питайте ШИМ-контроллер от 24 и более вольт, так как сама микросхема с буферным каскадом имеют стабилизатор питания.
При использовании электродвигателя в различных устройствах и инструментах неизменно возникает необходимость регулировки скорости вращения вала.
Самостоятельно сделать регулятор оборотов электродвигателя не составит труда. Нужно лишь подыскать качественную схему, устройство которой полностью бы подходило к особенностям и типу конкретного электрического двигателя.
Использование частотных преобразователей
Для регулировки оборотов электрического двигателя, работающего от сети с напряжением в 220 и 380 Вольт, могут использоваться частотные преобразователи. Высокотехнологичные электронные устройства позволяют благодаря изменению частоты и амплитуды сигнала плавно регулировать частоту вращения электродвигателя.
В основе таких преобразователей лежат мощные полупроводниковые транзисторы с широкоимпульсными модуляторами.
Преобразователи с помощью соответствующего блока управления на микроконтроллере позволяют плавно изменять показатель оборотов двигателя.
Высокотехнологичные преобразователи частоты используются в сложных и нагруженных механизмах. Современные частотные регуляторы имеют сразу несколько степеней защиты , в том числе по нагрузке, показателю тока напряжения и другим характеристикам. Отдельные модели питаются от электросети с однофазным напряжением в 220 Вольт и могут переделывать напряжение в трехфазные 380 Вольт. Использование таких преобразователей позволяет в домашних условиях использовать асинхронные электрические двигатели без применения сложных схем подключения.
Применение электронных регуляторов
Использование мощных асинхронных двигателей невозможно без применения соответствующих регуляторов оборотов. Такие преобразователи используются для следующих целей:
Используемая частотными преобразователями схема работы аналогична у большинства бытовых приборов. Похожие устройства также используются в сварочных аппаратах, ИБП, питании ПК и ноутбуков, стабилизаторах напряжения, блоках розжига ламп, а также в мониторах и жидкокристаллических телевизорах.
Несмотря на кажущуюся сложность схемы, сделать регулятор оборотов электродвигателя 220 В будет достаточно просто.
Принцип работы устройства
Принцип работы и конструкция регулятора оборотов двигателя отличается простотой, поэтому, изучив технические моменты, вполне по силам выполнить их самостоятельно. Конструктивно выделяют несколько основных компонентов, из которых состоят регуляторы вращения:
Отличием асинхронных двигателей от стандартных приводов является вращение ротора с максимальными показателями мощности при подаче напряжения на обмотку трансформатора. На начальном этапе показатели потребляемого тока и мощность у двигателя возрастает до максимума, что приводит к существенной нагрузке на привод и его быстрому выходу из строя.
При запуске двигателя на максимальных оборотах выделяется большое количество тепла, что приводит к перегреву привода, обмотки и других элементов привода. Благодаря использованию частотного преобразователя имеется возможность плавно разгонять двигатель, что предупреждает перегрев и другие проблемы с агрегатом. Электромотор может при использовании частотного преобразователя запускаться на частоте оборотов 1000 в минуту, а в последующем обеспечивается плавный разгон, когда каждые 10 секунд прибавляется 100−200 оборотов двигателя.
Изготовление самодельных реле
Изготовить самодельный регулятор оборотов электродвигателя 12 В не составит какого-либо труда. Для такой работы потребуется следующее:
- Проволочные резисторы.
- Переключатель на несколько положений.
- Блок управления и реле.
Использование проволочных резисторов позволяет изменять напряжение питания, соответственно, и частоту вращения двигателя. Такой регулятор обеспечивает ступенчатый разгон двигателя, отличается простой конструкции и может быть выполнен даже начинающими радиолюбителями. Такие простейшие самодельные ступенчатые регуляторы можно использовать с асинхронными и контактными двигателями.
Принцип работы самодельного преобразователя:
В прошлом наибольшей популярностью пользовались механические регуляторы, выполненные на основе вариатора или шестеренчатого привода. Однако они не отличались должной надежностью и часто выходили из строя.
Самодельные электронные регуляторы зарекомендовали себя с наилучшей стороны. Они используют принцип изменения ступенчатого или плавного напряжения, отличаются долговечностью, надежностью, имеют компактные габариты и обеспечивают возможность тонкой настройки работы привода.
Дополнительное использование в схемах электронных регуляторов симисторов и аналогичных устройств позволяет обеспечить плавное изменение мощности напряжения, соответственно электродвигатель будет правильно набирать обороты, постепенно выходя на свою максимальную мощность.
Для обеспечения качественной регулировки в схему включаются переменные резисторы, которые изменяют амплитуду входящего сигнала, обеспечивая плавное или ступенчатое изменение числа оборотов.
Схема на ШИМ-транзисторе
Регулировать скорость вращения вала у маломощных электродвигателей можно при помощи шин-транзистора и последовательного соединения резисторов в питании. Этот вариант отличается простотой реализации, однако имеет низкий КПД и не позволяет плавно изменять скорость вращения двигателя. Изготовить своими руками регулятор оборотов коллекторного двигателя 220 В с использованием шим-транзистора не составит особой сложности.
Принцип работы регулятора на транзисторе:
- Используемые сегодня шин-транзисторы имеют генератор пилообразного напряжения частотой в 150 Герц.
- Операционные усилители используются в роли компаратора.
- Изменение скорости вращения осуществляется за счёт наличия переменного резистора, управляющего длительностью импульсов.
Транзисторы имеют ровную постоянную амплитуду импульсов, идентичную амплитуде напряжения питания. Это позволяет выполнять регулировку оборотов двигателя 220 В и поддерживать работу агрегата даже при подаче минимального напряжения на обмотку трансформатора.
Благодаря возможности подключения микроконтроллера к ШИМ-транзистору обеспечивается возможность автоматической настройки и регулировки работы электропривода. Такие схемы исполнения преобразователей могут иметь дополнительные компоненты, которые расширяют функциональные возможности привода, обеспечивая работу в полностью автоматическом режиме.
Внедрение автоматических систем управления
Наличие в регуляторах и частотных преобразователях микроконтроллерного управления позволяет улучшить параметры работы привода, а сам мотор может работать в полностью автоматическом режиме, когда используемый контроллер плавно или ступенчато изменяет показатели частоты вращения агрегата. Сегодня в качестве микроконтроллерного управления используются процессоры, которые имеют отличающееся число выходов и входов. К такому микроконтроллеру можно подключить различные электронные ключи, кнопки, всевозможные датчики потери сигнала и так далее.
В продаже можно найти различные типы микроконтроллеров , которые отличаются простотой в использовании, гарантируют качественную настройку работы преобразователя и регулятора, а наличие дополнительных входов и выходов позволяет подключать к процессору различные дополнительные датчики, по сигналу которых устройство будет уменьшать или увеличивать число оборотов или же полностью прекращать подачу напряжения на обмотки электродвигателя.
Сегодня в продаже имеются различные преобразователи и регуляторы электродвигателя. Впрочем, при наличии даже минимальных навыков работы с радиодеталями и умении читать схемы можно выполнить такое простейшее устройство, которое будет плавно или ступенчато изменять обороты двигателя. Дополнительно можно включить в цепь управляющий симисторный реостат и резистор, что позволит плавно изменять обороты, а наличие микроконтроллерного управления полностью автоматизирует использование электрических двигателей.
5 частых вопросов, которые задают начинающие радиомеханики; 5 лучших транзисторов для регуляторов, тест на определение состава схемы
Регулятор электрического напряжения нужен для того, чтобы величина напряжения могла стабилизироваться. Он обеспечивает надежность работы и долговечность работы прибора.
Регулятор состоит из нескольких механизмов.
ТЕСТ:
Ответы на эти вопросы позволят узнать состав схемы регулятора напряжения 12 вольт и её сборку.- Какое сопротивление должно быть у переменного резистора?
- Как нужно подключать провода?
a) 1 и 2 клемма – питание, 3 и 4 – нагрузка
- Нужно ли устанавливать радиатор?
- Транзистор должен быть
Ответы:
Вариант 1. Сопротивление резистора 10 кОм – это стандарт для установки регулятора, провода в схеме подключаются по принципу: 1 и 2 клемма для питания, 3 и 4 для нагрузки – ток распределится правильно по нужным полюсам, радиатор устанавливать нужно – чтобы защитить от перегрева, транзистор использован КТ 815 – такой всегда подойдет. В таком варианте построенная схема сработает, регулятор станет работать.
Вариант 2. Сопротивление 500 кОм – слишком высокое, будет нарушена плавность звука в работе, а может не сработать вообще, 1 и 3 клемма это нагрузка, 2 и 4 питание, радиатор нужен, в схеме, где стоял минус будет плюс, транзистор любой – действительно можно использовать какой угодно.Регулятор не заработает из-за того, что схема собрана, будет неправильно.
Вариант 3. Сопротивление 10кОм, провода – 1 и 2 для нагрузки, 3 и 4 для питания, резистор имеет сопротивление 2кОм, транзистор КТ 815. Прибор не сможет заработать, так как он сильно перегреется без радиатора.
Как соединить 5 частей регулятора на 12 вольт.
Переменный резистор 10кОм.
Это переменный резистор 10ком. Изменяет силу тока или напряжений в электрической цепи, увеличивает сопротивление. Именно им регулируется напряжение.
Радиатор. Нужен для того, чтобы охладить приборы в случае их перегрева.
Резистор на 1 ком. Снижает нагрузку с основного резистора.
Транзистор. Прибор, увеличивает силу колебаний. В регуляторе он нужен, чтобы получить электрические колебания высокой частоты
2 проводка. Необходимы для того, чтобы по ним шел электрический ток.
Берем транзистор и резистор. У обоих есть 3 ответвления.
Проводятся две операции:
- Левый конец транзистора (делаем это алюминиевой частью вниз) присоединяем к концу, который находится в середине резистора.
- А ответвление середины транзистора соединяем с правым у резистора. Их необходимо припаять друг к другу.
Первый провод необходимо спаять с тем, что получилось во 2 операции.
Второй нужно спаять с оставшимся концом транзистора.
Прикручиваем к радиатору соединенный механизм.
Резистор на 1кОм припаиваем к крайним ножкам переменного резистора и транзистора.
Схема готова.
Регулятор скорости двигателя постоянного тока с помощью 2 конденсаторов на 14 вольт.
Практичность таких двигателей доказана, они используются в механических игрушках, вентиляторах и др. У них малый ток потребления, поэтому требуется стабилизация напряжения. Часто возникает необходимость подстройки частоты вращения или изменения скорости двигателя для корректировки выполнения цели, представленной какому – либо типу электродвигателя любой модели.
Эту задачу выполнит регулятор напряжения, который совместим с любым типом блока питания.
Чтобы это осуществить, надо изменить выходное напряжение, не требующее большого тока нагрузки.
Необходимые детали:
- 2 Конденсатора
- 2 переменных резистора
Соединяем части:
- Подключаем конденсаторы к самому регулятору.
- Первый резистор подключается с минусом регулятора, второй на массу.
Теперь менять скорость двигателя у прибора по желанию пользователя.
Регулятор напряжения на 14 вольт готов.
Простой регулятор напряжения 12 вольт
Регулятор оборотов 12 вольт для двигателя с тормозом.
- Реле – 12 вольт
- Теристор КУ201
- Трансформатор для запитки двигателя и реле
- Транзистор КТ 815
- Вентиль от дворников 2101
- Конденсатор
Используется для регулировки подачи проволоки, поэтому в ней присутсвует тормоз двигателя, реализованный с помощью реле.
К реле подключаем 2 провода от блока питания. На реле подается плюс.
Всё остально подключается по принципу обычного регулятора.
Схема полностью обеспечила 12 вольт для двигателя.
Регулятор мощности на симисторе BTA 12-600
Симистор – полупроводниковый аппарат, причисляется к разновидности тиристора и используется в целях коммутации тока. Он работает на переменном напряжении в отличие от динистора и обычного тиристора. От его параметра зависит вся мощность прибора.
Ответ на вопрос. Если схема собиралась бы на тиристоре, необходим был бы диод или диодный мост.
Для удобства схему можно собрать на печатной плате.
Плюс конденсатора нужно припаять к управляющему электроду симистора, он находится справа. Минус спаять с крайним третьим выводом, который находится слева.
К управляющему электроду симистора припаять резистор с номинальным сопротивлением 12 кОм. К этому резистору нужно присоединить подстрочный резистор. Оставшийся вывод нужно припаять к центральной ножке симистора.
К минусу конденсатора, который припаян к третьему выводу симистора необходимо прикрепить минус от выпрямительного моста.
Плюс выпрямительного моста к центральному выводу симистора и к той части, к которой симистор крепится на радиатор.
1 контакт от шнура с вилкой припаиваем к необходимому прибору. А 2 контакт к входу переменного напряжения на выпрямительном мосту.
Осталось припаять оставшийся контакт прибора с последним контактом выпрямительного моста.
Идет тестирование схемы.
Включаем схему в сеть. С помощью подстрочного резистора регулируется мощность прибора.
Мощность можно развить до 12 вольт для авто.
Динистор и 4 типа проводимости.
Это устройство, называется тригерным диодом. Обладает небольшой мощностью. В его внутренности нет электродов.
Динистор открывается при наборе напряжения. Скорость набора напряжения определяется конденсатором и резисторами. Вся регулировка производится через него. Работает на постоянном и переменном токе. Его можно не покупать, он находится в энергосберегающих лампах и его легко оттуда достать.
В схемах используется не часто, но чтобы не затрачивать деньги на диоды, применяют динистор.
Он содержит 4 типа: P N P N. Это сама электрическая проводимость. Между 2 прилегающими друг к другу областями образуется электронно-дырочный переход. В динистре таких переходов 3.
Схема:
Подключаем конденсатор. Он начинает заряжаться с помощью 1 резистора, напряжение почти равно тому, что в сети. Когда напряжение в конденсаторе достигнет уровня динистора, он включится. Прибор начинает работать. Не забываем про радиатор, иначе всё перегреется.
3 важных термина.
Регулятор напряжения – прибор, позволяющий на выходе подстраивать напряжение под устройство, для которого он необходим.
Схема для регулятора – рисунок, изображающий соединение частей устройства в одно целое.
Автомобильный генератор – устройство, в котором используется стабилизатор, обеспечивает превращение энергии коленчатого вала в электрическую.
7 основных схем для сборки регулятора.
СНИП
Использование 2 транзисторов. Как собрать стабилизатор тока.
Резистор 1кОм равен стабилизатору тока для нагрузки 10Ом. Главное условие – напряжение питания было стабилизированным. Ток зависит от напряжения по закону Ома. Сопротивление нагрузки намного меньше, чем сопротивление тока ограничивающего резистора.
Резистор 5 ватт, 510 Ом
Переменный резистор ППБ-3В, 47 Ом. Потребление – 53миллиампера.
Транзистор кт 815, установленный на радиаторе ток базы данного транзистора, задан резистором номиналом 4 и 7 кОм.
СНИП
СНИП
Еще важно знать
- На схеме стоит знак минуса, чтобы он был и в работе, то транзистор должен быть NPN структуры. Нельзя использовать PNP так как минус будет плюсом.
- Напряжение нужно постоянно регулировать
- Какая величина тока в нагрузке, это нужно знать, чтобы регулировать напряжение и прибор не переставал работать
- Если разность потенциалов будет больше 12 вольт на выходе, то значительно уменьшится уровень энергии.
Топ 5 транзисторов
Разные виды транзисторов применяются для разных целей, и существует необходимость его выбирать.
- КТ 315. Поддерживает NPN структуру. Выпущен в 1967 году, но до сих пор используется. Работает в динамическом режиме, и в ключевом. Идеален для приборов малой мощности. Больше подходит для радиодеталей.
- 2N3055. Лучше всего подходит для звуковых механизмов, усилителей. Работает в динамическом режиме. Спокойно используется для регулятора 12 вольт. Удобно крепится на радиатор. Работает на частотах до 3 МГц. Хоть транзистор и выдерживает только до 7 ампер, он вытягивает мощные нагрузки.
- КП501. Производитель рассчитывал его на применение в телефонных аппаратах, механизмах связи и радиоэлектронике. Через него происходит управление приборами с минимальными затратами. Преобразует уровни сигнала.
- Irf3205. Пригоден для автомобилей, повышает высокочастотные инверторы. Поддерживает значительный уровень тока.
- KT 815. Биполярен. Имеет структуру NPN. Работает с усилителями низкой частоты. Состоит из пластмассового корпуса. Подходит для импульсных устройств. Используется часто в генераторных схемах. Транзистор сделан давно, по сей день работает. Даже есть шанс, что он находится в обычном доме, где лежат старые приборы, нужно только их разобрать и посмотреть, есть ли там.
3 ошибки и как их избежать.
- Ножки транзистора и резистора спаяны друг с другом полностью. Чтобы этого избежать, нужно внимательно читать инструкцию.
- Хоть и поставлен радиатор, перегрелся прибор.Это связано с тем, что во время того, как детали спаиваются, происходит перегрев. Для этого нужно, ножки транзистора держать пинцетом для отвода тепла.
- Реле не стало работать после починки. Выгоняет проволоку после того как отпустил кнопку. Проволока по инерции тянется. Значит, не работает электротормоз. Берем реле с хорошими контактами и подключаем к кнопке. Подключить провода для питания. Когда на реле не подается напряжение, контакты становятся замкнутыми, поэтому обмотка замыкается сама на себя. Когда на реле подается напряжение(плюс), меняются контакты в схеме и напряжение подается на мотор.
Ответы на 5 часто задаваемых вопросов
- Почему входное напряжение выше, чем выходное?
По такому принципу работают все стабилизаторы, при таком типе работы напряжение приходит в норму и не скачет от условленных ей значений.
- Может ли убить током при неполадке или ошибке?
Нет, не убьет током, напряжение в 12 вольт слишком мало, чтобы это произошло.
- Нужен ли постоянный резистор? И если нужен, то, для каких целей?
Не обязательно, но используется. Он нужен для того, чтобы ограничить ток базы транзистора при крайнем левом положении переменного резистора. И также при его отсутствии может сгореть переменный.
- Можно ли использовать схему КРЕН вместо резистора?
Если вместо переменного резистора включить регулируемую схему КРЕН, которую часто используют, то тоже получится регулятор напряжения. Но есть оплошность: низкий КПД. Из-за этого высокое собственное энергопотребление и тепловыделение.
- Резистор горит, но ничего не крутится. Что делать?
Резистор обязательно 10кОм. Желательно использовать транзисторы КТ 315 (старой модели) – они желтого или оранжевого цвета с буквенным обозначением.
Контроллер скорости двигателя постоянного тока| Доступна подробная принципиальная схема
Подпишитесь на обновления Отписаться от обновленийВот простая схема контроллера переменной скорости электродвигателя постоянного тока, которая может быть настроена для управления скоростью движения дворников ветрового стекла автомобилей.
Схема включает таймер NE555 (IC1), транзистор драйвера двигателя средней мощности BD239 (T1), переключающий транзистор большой мощности BD249 (T2) и несколько других дискретных компонентов. Он сконфигурирован для использования в автомобиле с отрицательной клеммой источника питания, подключенной к земле.
Цепь регулятора скорости двигателя
Здесь IC1 подключен как низкочастотный, автономный нестабильный мультивибратор с выходом контроллера скорости двигателя постоянного тока с широтно-импульсной модуляцией (ШИМ). Компоненты R-C, такие как R1, VR1, R2 и C1, определяют частоту колебаний.
Potmeter VR1 работает как главный регулятор скорости двигателя. Компоненты R3, C3 и C4 развязывают питание постоянного тока генератора. Красный светодиод мигающего типа (LED1) используется для визуальной индикации включения питания.’
Схемаконтроллера скорости двигателя постоянного тока. Когда рычаг стеклоочистителя потенциометра VR1 находится в верхнем положении, конденсатор C1 заряжается через R1, R2 и D1 и выдает серию импульсов на выходе IC1 с длинной отрицательной и короткой положительной длительностью импульсов. Следовательно, скорость двигателя низкая. С другой стороны, когда рычаг стеклоочистителя VR1 находится в нижнем положении, C1 заряжается через R1, R2 и VR1 и разряжается через R2. Получающаяся в результате последовательность импульсов имеет длинную положительную и короткую отрицательную ширину импульсов.
Теперь двигатель вращается с большой скоростью.Выход на выводе 3 микросхемы IC1 подается на транзистор T1, который, в свою очередь, управляет двигателем постоянного тока через высокомощный переключающий транзистор T2 с выбранной скоростью. Резистор R4 ограничивает базовый ток транзитора T2.
Диод D2, подключенный встречно параллельно с двигателем постоянного тока, ограничивает обратную ЭДС. генерируется вращением мотора. Конденсатор С5 подавляет паразитные колебания.
Строительство и испытания
Схема управления двигателем может питаться от источника постоянного тока 12 В непосредственно от аккумуляторной батареи автомобиля.Для удобства и безопасности поместите его в небольшой металлический шкаф. Для строительства подойдет верборд средних размеров.
Используйте качественный DIP-разъем для IC1. Наконец, не забудьте добавить подходящий радиатор для транзистора T2.
Типы двигателей постоянного тока
- Матовый двигатель
- Бесщеточный двигатель
- Серводвигатель
Применение двигателей постоянного тока
- Малогабаритные двигатели постоянного тока используются в инструментах, игрушках и различной бытовой технике.
- Крупногабаритные двигатели постоянного тока используются в производственных подразделениях, электромобилях и лифтах.
Статья была впервые опубликована в декабре 2007 г. и обновлена 18 сентября 2020 г.
Как сделать схему регулятора скорости двигателя постоянного тока (50 В, 15 А)
Всем привет! Сегодня мы собираемся создать схему регулятора скорости двигателя постоянного тока, способную работать с двигателем постоянного тока 50 В и 15 А. Принципиальная схема, работа и компоненты, использованные при создании этого проекта, подробно описаны.Это наиболее полный контроллер скорости двигателя постоянного тока, который вы найдете в Интернете.
Вы можете посмотреть это видео для рабочей части проекта
Технические характеристики этого регулятора скорости двигателя постоянного тока:- Этот регулятор скорости принимает входное напряжение от 6 В до 50 В .
- МАКС. выходной ток составляет 15 А при использовании подходящего радиатора,
- Имеют защиту от перенапряжения затвора и
- Защиту от обратного хода или скачков напряжения.
После подключения необходимого входа напряжения и двигателя к выходной клемме, скорость двигателя можно увеличить или уменьшить с помощью потенциометра.
Схема контроллера скорости двигателя постоянного тока Принципиальная схема регулятора скорости двигателя постоянного тока Необходимые компоненты:- LM317 Регулятор напряжения
- Таймер 555
- IRF3205S n-канальный Mosfet
- Конденсатор 330 мкФ (63 В)
- Конденсатор 220 мкФ (63 В)
- Конденсатор 47 мкФ (63 В)
- Керамические конденсаторы 10 нФ X 3
- 1k резисторы X 2
- резистор 330 Ом
- 6.2 кОм резистор
- 100 ом резистор
- 1n4007 диоды X 3
- 16 A диод Шоттки
- 100k потенциометр
- 33 ом резистор
- стабилитрон 10 В
На первый взгляд эта схема может показаться очень сложной, поэтому давайте упростим ее. Эта схема разделена на три основные части:
Регулятор напряжения или понижающий преобразователь
Генератор ШИМ.
Цепь переключения.
Теперь давайте разберемся с каждой частью по порядку. Я использую настольный источник питания для питания схемы. И установите напряжение около 12 В в качестве входного напряжения для регулятора скорости. Я использую осциллограф для анализа сигналов.
Для лучшего понимания я сначала прохожу через схему переключения:
ЦЕПЬ ПЕРЕКЛЮЧЕНИЯ Цепь переключения регулятора скорости двигателя постоянного токаСхема переключения используется для включения и выключения выхода с очень высокой частотой.Здесь для выполнения этой работы используется Mosfet.
Mosfet может переключать высокое выходное напряжение, подключенное между его стоком и истоком, если пороговое напряжение приложено к его затвору. Это пороговое напряжение обычно намного меньше, чем напряжение, которое может переключать Mosfet, или напряжение между стоком и истоком.
Также, когда напряжение на затворе Mosfet увеличивается сверх порогового напряжения затвора, все больше и больше тока протекает через сток к источнику.
Здесь небольшое предостережение : Пороговое напряжение – это напряжение, при котором полевой МОП-транзистор начинает немного проводить.Чтобы полевой МОП-транзистор проводил достаточно, чтобы управлять значительной нагрузкой, ему также необходимо дополнительное напряжение.
Таким образом, если двигатель постоянного тока подключен между затвором и истоком полевого МОП-транзистора, напряжение на нем и, следовательно, скорость можно контролировать, управляя напряжением затвора. А для этого нам понадобится переменное напряжение на затворе. Теперь на помощь приходит ШИМ-генератор .
ЦЕПЬ ГЕНЕРАТОРА ШИМ Цепь генератора ШИМ регулятора скорости двигателя постоянного токаТребуемое переменное напряжение на затворе может быть легко обеспечено с помощью напряжения ШИМ.ШИМ или широтно-импульсная модуляция – это метод, используемый для получения любого напряжения между 0 и максимумом входного напряжения. Это достигается переключением входного напряжения с определенной частотой и определенным рабочим циклом.
Предположим, у нас есть входное напряжение 5В. Это может быть либо 5 В, либо 0. Теперь, если он включается и выключается с очень высокой частотой, мы получаем прямоугольную форму волны.
Допустим, время включения составляет 50% от общего времени. Эти 50% называются рабочим циклом волны ШИМ, что дает нам конечное напряжение 2.5вольт. По мере увеличения времени включения или рабочего цикла общее напряжение увеличивается.
И когда рабочий цикл достигает 100%, мы получаем выход 5 вольт. Точно так же, когда он находится на уровне 0%, мы получаем выход 0 вольт. Это называется МОДУЛЯЦИЯ ШИРИНЫ ИМПУЛЬСА, поскольку мы модулируем ширину импульса, чтобы получить переменное напряжение.
Подробнее о ШИМ здесь: Подробнее о ШИМ
Форма волны ШИМСхема регулятора скорости здесь генерирует сигнал ШИМ с помощью таймера 555 IC .Эта ИС обеспечивает необходимое переменное напряжение на затворе полевого МОП-транзистора, работая в нестабильном режиме.
Теперь существует определенный предел входного напряжения ИС, который наверняка меньше предела напряжения этого регулятора скорости.
Следовательно, чтобы обеспечить подходящее рабочее напряжение для микросхемы таймера 555, используется схема регулятора напряжения, которая подает фиксированное напряжение на микросхему. Для этого в схеме используется регулятор напряжения LM317 .
ЦЕПЬ РЕГУЛЯТОРА НАПРЯЖЕНИЯ Цепь регулятора напряжения регулятора скорости двигателя постоянного токаЗдесь используется стабилизатор напряжения LM317.Он обеспечивает переменное напряжение от 1,25 до 37 вольт. Он используется здесь из-за его нескольких преимуществ перед другими регуляторами напряжения, такими как Программируемое выходное напряжение , Высокий выходной ток , лучшая линия и регулировка нагрузки .
Подробнее о регуляторах напряжения здесь: Подробнее о регуляторах напряжения
Как работает эта схема регулятора скорости?Конденсатор емкостью 330 мкФ подключен к клеммам входного питания для сглаживания постоянного тока.За ним следует резистор на 330 Ом, включенный последовательно с конденсатором емкостью 47 мкФ , образующим фильтр нижних частот, который затем питает регулятор напряжения LM317.
Этот регулятор напряжения запрограммирован с использованием двух резисторов (R3 и R2) , чтобы обеспечить постоянное напряжение 9 вольт.
Стоит отметить, что для получения этого выходного сигнала 9 В падение напряжения должно быть более 2,5 В или входное напряжение должно быть не менее 11,5 В. Чтобы получить выходное напряжение, отличное от указанного, вам необходимо изменить значения этих резисторов в соответствии с формулой частоты, указанной в таблице данных.
| VO = VREF (1 + R2 / R1) + (IADJ × R2) |
Загрузите техническое описание LM317 отсюда: техническое описание LM317
Здесь R2 – 6.2k, а R1 – 1k. С г. идж. находится в диапазоне мкА, просто не обращайте на это внимания. Это дает нам выходное напряжение 9 вольт. Затем эти 9 вольт питают таймер 555 . Здесь мы используем таймер 555 в нестабильном режиме или в качестве генератора ШИМ.
ШИМ Напряжение, генерируемое таймером 555№ контакта.1 микросхема заземлена. 2 и 6 соединены вместе, а также 4 и 8. Конденсатор 220 мкФ сглаживает поступающие 9 вольт.
Теперь резистор 1 кОм , 2 диода 1N4007 , потенциометр 100 кОм и конденсатор 10 нФ образуют RC-цепь зарядки-разрядки, вызывая выход ШИМ на третьем выводе таймера 555.
Этот выход ШИМ управляет затвором МОП-транзистора. Если вы хотите узнать больше о таймере 555 и о том, как он генерирует волну ШИМ, я предлагаю вам просмотреть массу отличных статей, доступных в Интернете.
Подробнее о 555 таймерах здесь: 555 Подробнее о таймере
Некоторые 555 проектов таймера с подробным объяснением: 555 Таймер проектов
Цепь зарядки-разрядки RCНаиболее важным аспектом волны ШИМ является ее частота, и вот формула частоты таймера 555 для того же самого. Вы также можете рассчитать частоту вывода ШИМ с помощью онлайн-калькуляторов.
| Частота = 1,44 / (R1 + 2 × R2) × C1 Гц |
Загрузите техническое описание таймера 555 отсюда: техническое описание таймера 555
Калькулятор частоты ШИМ таймера 555: Калькулятор частоты таймера 555
Установка значения R1 (1 кОм), емкости (около 7 нФ из-за допуска и других факторов) и значения потенциометра, которое в моем случае составляет примерно 91 кОм в формуле, дает нам частоту 1100 Гц.
Конечно, это неточно из-за нескольких других факторов, которые влияют на схему. Фактическая частота составляет 1,3 кГц, которая почти постоянна для 0–100% рабочего цикла выходного сигнала ШИМ.
Этот выход ШИМ управляет затвором Mosfet , подключенным через резистор на 33 Ом. IRF3205S может выдерживать ток до 110 А при надлежащей системе охлаждения и достаточном напряжении на затворе. Предел напряжения между стоком и источником составляет максимум 55 В. тогда как напряжение между затвором и источником составляет максимум 20 В.
Источник полевого МОП-транзистора заземлен, сток подключен к одной клемме выхода, а другая клемма – к 12 В. Таким образом, двигатель подключается между плюсом питания 12 В и стоком полевого МОП-транзистора .
Теперь, чтобы защитить полевой МОП-транзистор от скачков напряжения, вызванных двигателем, диод Шоттки подключен к двигателю или между стоком и плюсом источника питания 12 В.
Подробнее о обратных диодах можно узнать здесь: Основы обратноходовых диодов
Диоды Шотткиобычно предпочтительны в обратных диодах, потому что они имеют самое низкое прямое падение (~ 0.2 В, а не> 0,7 В для малых токов) и способны быстро реагировать на обратное смещение (при повторном включении катушки индуктивности) или, другими словами, диод Шоттки имеет эффективное мгновенное время обратного восстановления, следовательно, подходит для высокочастотного Приложения.
Контроллер скорости двигателя постоянного тока в действии Контроллер скорости двигателя постоянного тока в действииПотенциометр контролирует скорость двигателя. А сигнал ШИМ, генерируемый таймером 555, отображается на осциллографе.Также можно измерить такие измерения, как рабочий цикл и Vpk-pk .
Важные моментыДля защиты от перенапряжения используйте стабилитрон между затвором и истоком МОП-транзистора, как указано на схеме.
Двигатель, которым я здесь управляю, рассчитан на 12 В и потребляет до 2 А при максимальной нагрузке, что не является такой большой нагрузкой. Следовательно, частота ШИМ 1 кГц здесь подойдет, но для больших двигателей частота должна быть выше 15 кГц. И чтобы настроить частоту ШИМ, измените значение потенциометра или конденсатора, чтобы получить желаемую выходную частоту.Так что имейте это в виду при использовании больших нагрузок.
Simple 12V | 9V | Регулировка скорости двигателя постоянного тока 6 В с режимом ШИМ
Сегодня я собираюсь показать вам эту схему. Вы хотите контролировать скорость двигателя постоянного тока? У нас есть много способов сделать это. Но при желании легко и дешево.
Это схема контроллера двигателя с регулируемой скоростью 12 В постоянного тока, использующая КМОП. В них используется принцип ШИМ-режима управления двигателем. Мы можем регулировать скорость небольшого двигателя 12 В. Даже двигатель 6 В или 9 В тоже может быть использован.
Это просто и использует несколько компонентов, таких как цифровая микросхема и драйвер транзистора в качестве основных.
Метод управления скоростью двигателя
Напряжение может хорошо контролировать скорость двигателя постоянного тока.
Обычно низкое напряжение вызывает низкую скорость двигателя. Но когда высокое напряжение вызывает высокую скорость двигателя.
Идея хорошего изменения напряжения – это импульс. Посмотрите на форму волны ниже.
Среднее напряжение импульсаПредставьте, что вы подключаетесь к лампе. Затем его яркость упадет.Среднее значение напряжения составляет половину напряжения источника питания.
У нас есть важное наблюдение:
- T = Период
- Частота = 1 / T
- Рабочий цикл = t / T x 100%
Среднее напряжение будет варьироваться в зависимости от:
Предположим, что: Уровень напряжения составляет 10 В, t = 0,2 мс, T = 1 мс,
Рабочий цикл = 0,2 мс / 1 мс x 100% = 20%
Итак, среднее напряжение составляет 0,2 x 10 В = 2 В
Таким образом, нам нужен колебательный контур для управления включить-выключить двигатель.И его можно отрегулировать в соответствии с рабочим циклом.
Что можно сделать разными способами. Но цифровые ворота – это просто и дешево.
Раньше мы использовали цифровой затвор в качестве генератора при мигании светодиода.
И мы используем шлюз НЕ при подключении 4011.
Кроме того, мы можем использовать вентиль ИЛИ в шлюз НЕ.
Рекомендуется: Простые схемы светодиодных мигалок IC-4011
Посмотрите на изображение ниже.
Базовый генератор, использующий вентиль НЕ из логического элемента ИЛИ или ИЛИ-ИЛИ.
Связанный: 4011 Проекты схемы тонального генератора
Но у нас есть еще одна интересная проблема. Когда нам нужна максимальная скорость, мы должны установить рабочий цикл на 100%.
Конечно, мы не можем найти нормальный коммутатор, который бы быстро работал на этом уровне. Как это сделать? Лучше всего использовать транзистор. К тому же это просто и дешево.
Посмотрите на базовый транзистор Дарлингтона. Они могут управлять двигателем 12 В при токе 1 А.
Базовый транзистор ДарлингтонаУ нас есть 2 принципиальные схемы, чтобы показать вам.
Преимущество этих двух схем в том, что если у вас есть двигатель или аккумулятор на 9 В или 6 В, вы можете использовать их немедленно. Потому что мы используем CMOS IC, который можно использовать с напряжением от 3 до 15 В.
Первый: 4011 Управление скоростью двигателя постоянного тока
Если вы хотите управлять скоростью небольшого двигателя постоянного тока 12 В. Раньше увижу другие схемы. Я представляю эту схему, как показано на рисунке ниже.
Это простая схема. Потому что он использует CMOS с затвором 4011 NAND в качестве основной части и несколько других компонентов.
Который, как предполагается, работает в модели PWM (широтно-импульсная модуляция), поэтому имеет высокое значение. Он очень эффективен, низкое энергопотребление.
Интересная штука
- Мы используем потенциометр VR1 для регулировки скорости по мере необходимости.
- Затем мы используем два транзистора TIP41 и BC548 для подключения в Дарлингтоне, увеличивающем ток возбуждения.
- Мы должны держать теплоотвод на TIP41 из-за его тепла при их использовании.
- Пока двигатель функционирует, возможно обратный ток, он должен поставить диод D1-1N4148, чтобы предотвратить эту цепь.
Как это работает
Позвольте мне объяснить, почему это работает. Вот пошаговый процесс.
- Сеть переменного тока поступает в эту цепь к блоку питания. К ним относятся T1, D1, D2 и C1.
- T1 преобразует основное напряжение 220 В в 12 В.
- Затем переменный ток напряжения проходит через D1-D4 к двухполупериодному выпрямителю в постоянный ток.
- И есть фильтр C1 для постоянного напряжения, который так хорошо сглаживает.
- Эта схема представляет собой двухполупериодный выпрямитель с центральным отводным трансформатором и 2 диодами.
- Также вы можете использовать мостовой выпрямитель без центрального трансформатора ответвлений и 4 диодов.
Этот ток делится на 2 части.
- К мотору: Почти все течет.
- По 4011 CMOS: генерировать прямоугольный импульс. Эта ИС включает в себя 4 логических элемента NAND. Но мы используем всего 2 ворот. Каждый будет установлен на вентили инвертора и подключен к генератору импульсов.
Регулировка рабочего цикла и колебаний
Если мы используем единственный резистор как базовую схему.Рабочий цикл составляет всего 50% и не настраивается.
Используем 2 резистора. Первый регулируемый. И оба диода D3 и D4 определяют направление тока заряда и разряда C2.
Позволяет неравномерно регулировать рабочий цикл. R2 определяет время для диапазона вывода равным 1.
И R1, и VR1 устанавливают время диапазона вывода равным 0.
Регулировка VR1 изменяет рабочий цикл импульса.
Когда VR1 настроен на минимальное значение, рабочий цикл достигнет 100%.Скорость мотора будет максимальной.
Но когда VR1 высокий, ширина квадратного сигнала мала (остается больше места). Или рабочий цикл будет ниже.
Драйвер транзистора Дарлингтона
Так как выход CMOS не может управлять двигателем напрямую. Потому что его ток слишком мал.
Итак, мы используем транзистор для управления током. Используя два транзистора, соединенных по схеме Дарингтона, он имеет очень высокий коэффициент усиления по току. То есть
IO / IB1 = hFE1 = hFE1 hFE2 и
IC2 / IB1 = hFE1 hFE2
Транзистор Q2 будет пропускать ток напрямую.Выбор Q2 также должен соответствовать току двигателя. Не забывайте, что пусковой ток двигателя в несколько раз больше тока холостого хода.
Обычно это транзисторы, выдерживающие большой ток. У них низкий коэффициент усиления по току (hFE или B). Следовательно, hFE1 обычно больше, чем hFE2.
Как построить
Хотите построить? Эта схема состоит из нескольких частей. Итак, вы можете собрать его на универсальной плате. Некоторые хотят сделать проект лучше. Смотрите ниже! Это разводка медной печатной платы и компоновка компонентов.
Разводка печатной платы из меди У вас есть определенные навыки, связанные с электроникой.Список деталей
Резисторы 1 / 4W + -5%
R1: 4,7 кОм
R2: 330 кОм
VR1: переменные резисторы 2M (B)
Конденсаторы
C1: 0,1 мкФ Керамический тип
Полупроводниковые компоненты
IC1: CD4011, Quad 2-Input NAND Buffered B Series Gate
Q1: 2SA561, 0,15A, 50V PNP-транзистор
Q2: TIP41, 4A, 40V NPN-транзистор
D1, D2, D5: 1A, 1000V диод, 1N4007
Д3, Д4: 0.75A 200V Диод, 1N4148
Секунда: не затвор Управление двигателем с широтно-импульсной модуляцией
Это широтно-импульсная модуляция управления двигателем с использованием CD40106. Обычно мы просто вводим источник напряжения и постоянного тока в двигатель постоянного тока, что позволяет двигателю вращаться.
Если будет изменять или регулировать скорость вращения двигателя.
Нам нужно будет вводить напряжение в импульсах или периодически. Что сделает среднее напряжение на выходе другим.
Импульсное напряжение высокой частоты будет иметь среднее напряжение, чем низкочастотный импульс.
То же самое с импульсом с превышением рабочего цикла, у него будет среднее давление, намного превышающее значение низкого рабочего цикла.
Как работает CD40106 Управление двигателем с широтно-импульсной модуляцией
Среднее напряжение будет подаваться на двигатель постоянного тока. Для управления вращением мотора – медленным или быстрым.
В этой схеме используется вышеуказанный принцип. Сделав схему генератора импульсов или нестабильный мультивибратор.
Они состоят из затвора инвертора IC1 / 1 и IC1 / 2 с C1, R1, R2, VR1 и диода D1, D2.
Генератор сигналов имеет значение рабочего цикла, которое можно регулировать или вращать вместе с VR1.
Управление двигателем с широтно-импульсной модуляцией с помощью CD40106Импульсный сигнал цепи. Когда он настроен на слишком большой рабочий цикл, максимальное значение составляет 100% (сигнал имеет наиболее положительный импульс). Заставляет двигатель вращаться быстрее всех.
Если процент рабочего цикла уменьшен, скорость также уменьшится.
Импульсный выходной сигнал от IC1 / 2 поступит на Q1 (2N3906), Q2 (TIP41), которые подключены к схеме усилителя Дарлингтона.Чтобы продлить текущий импульс вверх.
Затем запустите двигатель, подключенный к выходным клеммам схемы.
Q2 (TIP41) действует через постоянный ток на двигатель. Выбор должен соответствовать текущему использованию двигателя.
Я выбираю больший ток, потому что, когда двигатель начинает потреблять больше тока от источника питания, чем при нормальном вращении. Или мотор не загружен.
Эта схема подходит для двигателя постоянного тока с небольшой мощностью.Он достаточно мал, чтобы напряжение и сила тока не превышали 12 вольт 2 ампер.
Что снижает потери мощности в двигателе и цепях.
Список деталей Резисторы 1/4 Вт + -5%
R1: 330 кОм
R2: 4,7 кОм
VR1: переменные резисторы 2 МОм
Конденсаторы
C1: 0,1 мкФ Керамический тип
полупроводниковые компоненты
IC1: CD40106, CMOS Hex Schmitt Triggers
Q1: 2N3906- PNP транзистор
Q2: TIP41- 4A 40V NPN транзистор
D1, D2: 0.Диод 75 А 200 В, 1N4148
D3: Диод 1 А 1000 В, 1N4007
Для этой схемы требуется достаточный источник питания. У тебя есть это? Если у вас его нет. Посмотрите: Learn Many Power supply circuit
Останавливает проблемы с компонентами и не работает проект.
Хотя схемы не те.
Он также может управлять скоростью двигателя с помощью ШИМ.
Вам также могут понравиться:
CR: Фото двигателя от SWHstore
Но если вы хотите, чтобы схема была лучше, чем эта схема.увидеть эти схемы.
PWM Control Speed 12V Motor для силового двигателя постоянного тока с напряжением от 12 В до 24 В с использованием TL494.
ПОЛУЧИТЬ ОБНОВЛЕНИЕ ПО ЭЛЕКТРОННОЙ ПОЧТЕ
Я всегда стараюсь сделать Electronics Learning Easy .
AB-026: Бездатчиковый стабилизатор скорости для двигателя постоянного тока
Введение
Скорость двигателя – это параметр двигателя постоянного тока, который часто измеряется и регулируется, обычно с помощью дополнительных датчиков и с обратной связью по замкнутому контуру.Для этого метода управления скоростью требуется какой-либо датчик скорости, обычно устанавливаемый на валу двигателя. Некоторые из наших двигателей постоянного тока и мотор-редукторов имеют задние валы специально для этой цели, например, 212-109.
Система управления с обратной связью для скорости двигателя постоянного токаЭта блок-схема представляет собой типичную систему управления с обратной связью, которая может быть разработана для работы в аналоговом или цифровом режиме.
Оптические датчики-го обычно используются с цифровыми контроллерами, в то время как аналоговые схемы часто используют тахогенераторы.С помощью ШИМ-управления можно достичь хорошей точности, гибкости и снизить потери мощности. Однако это происходит за счет дополнительного компонента и, возможно, модификации механической конструкции, если вы планируете использовать его в существующем продукте.
Для щеточных двигателей постоянного тока можно измерять и регулировать скорость без каких-либо датчиков на двигателе, используя основную характеристику – напряжение обратной ЭДС, зависящее от скорости.
Аналоговое измерение скорости двигателя без датчика
Двигатель постоянного тока моделируется как последовательное соединение внутреннего сопротивления и источника напряжения обратной ЭДС.Напряжение на клеммах двигателя складывается из обратной ЭДС и падения напряжения, превышающего сопротивление катушки.
Связаться
Поговорите с членом нашей команды.
Каталог двигателей
Ищете нашу продукцию?
Надежные и экономичные миниатюрные механизмы и двигатели, отвечающие вашим требованиям.
Эквивалентная схема электродвигателя постоянного тока с щеткойПадение напряжения на внутреннем сопротивлении якоря зависит от тока двигателя (и, следовательно, от момента нагрузки).Невозможно измерить скорость напрямую, измеряя только напряжение на клеммах двигателя.
Сопротивление обмотки Ra обычно постоянно – хотя оно имеет небольшую температурную зависимость, мы можем компенсировать его, чтобы падение напряжения на якоре двигателя было пропорционально току двигателя.
Поскольку невозможно измерить обратную ЭДС напрямую, нам необходимо рассчитать ее по следующему уравнению: 𝑉𝑚𝑜𝑡𝑜𝑟 = 𝑉𝑏𝑒𝑚𝑓 + (𝐼𝑎 × 𝑅𝑎)
К сожалению, напрямую измерить напряжение якоря также невозможно – однако мы можем подключить дополнительный (внешний) резистор последовательно с двигателем.Измерение падения напряжения на этом последовательном резисторе позволяет нам определить обратную ЭДС.
Эквивалентная схема электродвигателя постоянного тока с последовательным резисторомЕсли мы установим значение последовательного резистора равным сопротивлению в двигателе, мы гарантируем, что любое изменение падения напряжения на последовательном резисторе будет равно падению напряжения в якоре: 𝑉𝑎 = 𝐼𝑎 × 𝑅𝑎𝑉𝑠 = 𝐼𝑎 × 𝑅𝑠𝑅𝑠 = 𝑅𝑎𝑉𝑠 = 𝑉𝑎
Итак, сначала нам нужно узнать или измерить сопротивление якоря двигателя. Это можно сделать путем измерения сопротивления на клеммах двигателя с помощью омметра или путем измерения тока остановки с известным напряжением питания.При использовании последнего предпочтительнее использовать низкое напряжение питания, чтобы избежать повреждения из-за перегрузки по току.
Например, при питании двигателя 1,2 В и измерении 100 мА во время остановки сопротивление якоря рассчитывается как: = 𝐼𝑠𝑡𝑎𝑙𝑙 × 𝑅𝑎𝑅𝑎 = 𝑉𝑠𝑢𝑝𝑝𝑙𝑦𝐼𝑠𝑡𝑎𝑙𝑙𝑅𝑎 = 1,2𝑉100𝑚𝐴𝑅𝑎 = 12 Ом
При использовании омметра для измерения оконечного сопротивления снимите среднее значение нескольких показаний при различных положениях ротора.
Напряжение питания будет равно напряжению последовательного резистора, напряжению сопротивления якоря и напряжению обратной ЭДС.𝑉𝑠𝑢𝑝𝑝𝑙𝑦 = 𝑉𝑠 + 𝑉𝑎 + 𝑉𝑏𝑒𝑚𝑓
Напряжение обратной ЭДС можно рассчитать, вычтя удвоенное падение напряжения на последовательном резисторе из напряжения питания. = 𝑉𝑠𝑢𝑝𝑝𝑙𝑦– (2 × 𝑉𝑠)
Чтобы уменьшить потери мощности, мы можем использовать более низкое значение последовательного сопротивления, но резистор в конечном итоге снизит напряжение, воспринимаемое двигателем. Используя мостовую схему, мы можем сохранить высокую чувствительность измерения и компенсировать потери мощности в двигателе:
Мостовая схема для измерения напряжения обратной ЭДСПравая опора моста состоит из последовательно включенных электродвигателя M и резистора Rs .Левая ножка – это последовательное соединение резисторов R1 и R2 , каждая ножка подключена к источнику питания. Напряжение обратной ЭДС измеряется между точками A и B .
Rload представляет входное сопротивление нашей измерительной цепи. Поскольку он будет состоять из операционного усилителя, его входное сопротивление будет намного больше, чем другие сопротивления в этой схеме (идеальные операционные усилители имеют бесконечное входное сопротивление).
Нам необходимо убедиться, что напряжение между точками A, и B не зависит от тока двигателя и напряжения питания и зависит только от скорости двигателя и входного сопротивления измерительной цепи ( Rload ).
Начнем с анализа схемы без обратной ЭДС, т.е. когда двигатель остановлен. Для балансировки моста напряжение между точками A, и B должно быть нулевым. Это происходит до тех пор, пока соотношение между R1 и R2 такое же, как Rs и Ra : 𝑅2𝑅1 = 𝑅𝑎𝑅𝑠
ч – коэффициент усиления нашего моста: ℎ = 𝑅1𝑅2 = 𝑅𝑠𝑅𝑎
Если мы выведем двигатель из состояния остановки, напряжение обратной ЭДС пропорционально скорости: 𝑉𝑏𝑒𝑚𝑓 = 𝑘𝑒 × 𝑛
, где ke – электрическая постоянная для нашего двигателя, а n – скорость двигателя.
Если двигателю разрешено вращаться со скоростью холостого хода, для идеального двигателя мы ожидаем, что Ia равно 0. Это потому, что идеальные двигатели игнорируют сопротивление воздуха и трение подшипников. Напряжение на скорости холостого хода: 𝑉𝑟𝑝𝑚𝑁𝐿 = 𝑘𝑒 × 𝑛𝑁𝐿
Отсюда Vbemf можно подписать как: 𝑉𝑏𝑒𝑚𝑓 = 𝑉𝑟𝑝𝑚𝑁𝐿 × 𝑛𝑛𝑁𝐿 = 𝑉𝑟𝑝𝑚𝑁𝐿 × 𝐾
Где K – коэффициент пропорциональности между Vbemf и V_rpm в нашей схеме.
Теперь мы можем составить систему уравнений для нашей схемы:
Текущие уравненияРешение для I5 : 𝐼5 = ℎ (ℎ + 1) 𝑉𝑟𝑝𝑚𝑁𝐿 × 𝐾2ℎ (𝑅𝑎 + 𝑅2) + (ℎ + 1) 2 × 𝑅𝑙𝑜𝑎𝑑
Таким образом, выходное напряжение равно: 𝑉𝑟𝑝𝑚 = 𝐼5 × 𝑅𝑙𝑜𝑎𝑑 = ℎ (ℎ + 1) × 𝑉𝑟𝑝𝑚𝑁𝐿 × 𝐾2ℎ (𝑅𝑎 + 𝑅2) + (ℎ + 1) 2 × 𝑅𝑙𝑜𝑎𝑑 × 𝑅𝑙𝑜𝑎𝑑
А для работы без нагрузки: 𝑉𝑟𝑝𝑚 = ℎℎ + 1 × 𝑉𝑟𝑝𝑚𝑁𝐿 × 𝐾
Выходное напряжение между точками A, и B не зависит от источника питания и тока двигателя, как без нагрузки, так и при работе под нагрузкой.Он зависит от х , и при увеличении выходное напряжение также увеличивается.
Как упоминалось ранее, сопротивление якоря будет изменяться в зависимости от температуры, что приводит к разбалансировке моста и влияет на выходную мощность В об / мин . Чтобы свести к минимуму этот эффект, мост следует настраивать, когда двигатель находится при рабочей температуре.
Этот метод стабилизации скорости был популярным решением для контроллеров скорости вращения ротора регулятора, используемых в магнитофонах, использующих аналоговую электронику.В эпоху магнитофонов многие компании производили микросхемы для управления двигателем постоянного тока, чтобы лента двигалась с постоянной скоростью. Это было интересное решение, потому что оно работало линейно и не создавало шума, как контроллеры на основе ШИМ.
Общие ИС включают LA5586, TDA7274, BA6220 и AN6550. К сожалению, производство большинства из них было снято с производства, и теперь они доступны только на вторичном рынке. Схемы в микросхемах немного отличались, но принцип работы по-прежнему основан на мостовой схеме, описанной выше.
LA5586 Эквивалентная схема регулятора скорости двигателя и прикладная схемаОбратите внимание, что эквивалентная схема нарисована с источниками тока и постоянным коэффициентом тока. Коэффициент текущей ликвидности составляет от 20 до 40, в зависимости от конкретной ИС, и обозначен как K . В интегральных схемах легко сделать два источника тока с одинаковыми температурными параметрами.
Двигатель подключен к одной ветви моста, а вторая ветвь содержит резистор со значением K, в раз превышающим внутреннее сопротивление двигателя.
Цепь установившегося состояния для контроллера мотораВ установившемся режиме ток двигателя в K в раз больше, чем ток через Rt . Отрицательный вход операционного усилителя подключен к источнику напряжения, поэтому падение напряжения на резисторе Rt всегда будет ниже, чем напряжение двигателя. Разница составит Vref . Напряжение в точке A (относительно земли) всегда будет выше, чем напряжение в точке B .
Без Rs , ток через Rt в 40 раз меньше тока двигателя. Когда нагрузка двигателя увеличивается, напряжение в точке B увеличивается, а также увеличивается выходное напряжение усилителя. Более высокое напряжение усилителя вызывает более высокий ток двигателя, что увеличивает крутящий момент двигателя. Регулировка скорости может быть достигнута путем добавления шунтирующего резистора – напряжение между точками A, и B всегда равно опорному напряжению, поэтому легко контролировать дополнительный ток, добавленный к Rt .
Эта схема будет сбалансирована, когда напряжение двигателя равно сумме напряжений на Rt и Rs ( Vref ). Уравнение установившегося состояния: 𝐼𝑚 × 𝑅𝑚 + 𝑉𝑏𝑒𝑚𝑓 = 𝑅𝑇 × 𝐼𝑠 + 𝑅𝑇 × 𝐼𝑠 + 𝐼𝑚𝐾 + 𝑉𝑟𝑒𝑓
Отсюда уравнение для обратной ЭДС: 𝑉𝑏𝑒𝑚𝑓 = 𝑉𝑟𝑒𝑓 + (1 + 1𝐾) × 𝑅𝑇 × 𝐼𝑠 + 𝑅𝑇𝐾 – 𝑅𝑚 × 𝐼𝑚
Предположим: 𝐾 × 𝑅𝑚 = 𝑅𝑇
, то количество оборотов, определяемое Vbemf , составляет: 𝑉𝑏𝑒𝑚𝑓 = 𝑉𝑟𝑒𝑓 + 𝑅𝑇 × (1 + 1𝐾) × 𝐼𝑠
Важно, чтобы во всех случаях значение Rt было меньше K x Rm , в противном случае цепь будет чрезмерно компенсированной и нестабильной.
Аналоговый регулятор скорости с отрицательным сопротивлением
Увеличение нагрузки на двигатель приводит к увеличению потребляемого тока и падению скорости. Также уменьшается обратная ЭДС и напряжение на двигателе, этот метод управления известен как регулятор отрицательного вывода.
В этом случае мы используем операционный усилитель для управления скоростью, поэтому наша R_load будет на тысячи больше, чем другое сопротивление в этой цепи, и снова может быть опущена.
Из предыдущего раздела мы знаем, что напряжение источника питания не изменилось на В об / мин , что позволяет нам запитать нашу схему от мощного операционного усилителя или добавить транзистор к выходу стандартного операционного усилителя. .Подключив инвертирующий вход к ножке моста между двигателем и последовательным резистором, мы можем управлять источником питания моста с помощью напряжения, подключенного к неинвертирующему выходу.
Цепь управления напряжением двигателяВходное напряжение подается на неинвертирующий вход операционного усилителя, а инвертирующий вход подключается непосредственно к клемме двигателя. Мы пока не можем контролировать скорость с помощью схемы, в связи с чем наш усилитель работает как буфер (или повторитель напряжения) с коэффициентом усиления равным 1.По сути, входное напряжение определяет напряжение двигателя.
Можно изменить скорость двигателя, установив напряжение Vin, но это не поддерживает постоянную скорость при изменении нагрузки. При постоянном входном напряжении двигатель будет вращаться быстрее при малых нагрузках и медленнее при увеличении нагрузки. Нам нужно еще несколько компонентов для стабилизации скорости двигателя.
Падение напряжения на Rs пропорционально падению напряжения на сопротивлении якоря двигателя, мы будем использовать это напряжение для компенсации падения напряжения на сопротивлении якоря.Это можно сделать, добавив модификацию схемы к приведенной ниже – добавив R1 и R2 и подключив их среднюю точку к неинвертирующему входу операционного усилителя.
Цепь регулятора скорости двигателяСоотношение R1 и R2 должно быть таким же, как Rs и Ra , чтобы обеспечить стабилизацию скорости. На изображении выше показана полная схема и ее эквивалент для руководства, управляющее напряжение должно быть таким же, как напряжение обратной ЭДС при желаемой скорости.
Коэффициент компенсации определяется значением Rs , но удобнее использовать стандартное значение сопротивления, а затем изменить R1 или R2 соответственно.
Если скорость двигателя уменьшается при приложении нагрузки, следует увеличить значение R2 (или уменьшить R1 ). Если скорость двигателя начинает колебаться (или имеет тенденцию к увеличению) при приложении нагрузки, следует уменьшить R2 или ( R1 следует увеличить).
Чтобы спроектировать эту схему, нам нужно знать, какое значение обратной ЭДС при желаемой скорости:
- Чтобы найти напряжение обратной ЭДС на желаемой скорости, вал двигателя может быть установлен на бурильщик и приведен в движение. После достижения желаемой скорости (проверенной тахометром) измерьте напряжение на клеммах двигателя с помощью высокоомного вольтметра.
- Измерьте внутреннее сопротивление обмотки с помощью омметра на клеммах двигателя. Хорошо взять среднее значение из нескольких различных измерений положения ротора.
- Выберите значение Rs из стандартных значений, оно может быть меньше сопротивления двигателя.
- Выберите R1 и R2 , чтобы соотношение было таким же, как соотношение между Rs и Ra . Фактические значения резистора должны быть больше Rs и Ra для экономии тока. Поскольку эквивалентное сопротивление плеч моста будет другим, операционный усилитель должен быть с низким входным током.
- Подайте управляющее напряжение, равное желаемой обратной ЭДС.
- Проверьте скорость и соответствующим образом компенсируйте (указано в абзаце перед этим списком).
Для температурной компенсации можно выбрать Rs с тем же температурным коэффициентом, что и обмотки двигателя – для меди это 3400 ppm. Этот резистор следует размещать как можно ближе к двигателю, чтобы поддерживать тот же температурный режим.
Простая схема стабилизации скорости двигателя также может быть выполнена только на транзисторах:
Транзисторный регулятор скоростиВ этой схеме T2 работает как выходной каскад, а T1 как усилитель ошибки.Сигнал на коллекторе T1 является выходным сигналом, эмиттер работает как инвертирующий вход, а база как неинвертирующий вход.
Сигнал напряжения на двигателе подключен к неинвертирующему входу, потому что выходной каскад инвертирует этот сигнал, что означает, что больший сигнал на коллекторе вызывает меньший ток двигателя.
Диоды D1 и D2 создают опорное напряжение, напряжение на эмиттере T1 всегда ниже, чем напряжение на выводах двигателя.Напряжение компенсации берется из R3 и вычитается из напряжения питания моста, которое измеряется делителем напряжения R4 , R5 и R1 .
R7 и C2 – это схема запуска, помогающая преодолеть статическое трение, а C1 – конденсатор компенсации частоты, предотвращающий высокочастотные колебания.
Поскольку нам необходимо точное измерение обратной ЭДС, которое зависит от контактного сопротивления между коммутатором и щетками, лучше всего использовать двигатели с металлическими щетками.Большинство двигателей Precision Microdrive имеют металлические щетки и подходят для этого метода управления скоростью.
Регулятор скорости со специализированным IC
Эта схема основана на AN6651, специализированном контроллере двигателя, который ранее был популярен в магнитофонах.
AN6651 работает по тому же принципу, что и описанный выше LA5586. Контакты 2 и 4 являются выходами источника тока, соотношение между управляющим выходом (контакт 2) и выходом двигателя (контакт 4) составляет 40: 1.
Сопротивление R1 , подключенное между контактом 2 и источником питания, должно быть в 40 раз больше, чем внутреннее сопротивление двигателя для того же падения напряжения на R1 , что и на внутреннем сопротивлении двигателя: 𝐾 = 40𝑅1 = 𝐾 × 𝑅𝑚
AN6651 работает по тому же принципу, что и описанный выше LA5586.Контакты 2 и 4 являются выходами источника тока, соотношение между управляющим выходом (контакт 2) и выходом двигателя (контакт 4) составляет 40: 1.
Сопротивление R1 , подключенное между контактом 2 и источником питания, должно быть в 40 раз больше, чем внутреннее сопротивление двигателя для того же падения напряжения на R1 , что и на внутреннем сопротивлении двигателя: 𝐾 = 40𝑅1 = 𝐾 × 𝑅𝑚
Например, используя стандартное значение 390 Ом для R1 (меньшее значение снижает склонность к возникновению колебаний), нам нужно найти значения для последовательного соединения R2 и R3.Давайте возьмем двигатель постоянного тока 132-100 и установим целевую скорость 2400 об / мин. Для начала нам нужны некоторые технические детали:
- Сопротивление двигателя, = 10 Ом
- Входное напряжение без нагрузки при скорости 2400 об / мин, 𝑉𝑚 = 3,87𝑉
- Ток без нагрузки при скорости 2400 об / мин, 𝐼𝑚 = 23𝑚𝐴
Мы можем рассчитать падение напряжения на внутреннее сопротивление как: 23𝑚𝐴 × 10Ω = 0,23𝑉
, и мы также можем вычислить Vbemf как: 3,87𝑉 − 0,23𝑉 = 3,65𝑉
В установившемся режиме, когда цепь сбалансирована, уравнение цепи имеет следующий вид: 𝐼𝑚 × 𝑅𝑚 + 𝑉𝑏𝑒𝑚𝑓 = 𝑅1 × (𝐼𝑅2𝑅3 + 𝐼𝑅2𝑅3 + 𝐼𝑚𝐾 + 𝑉𝑟𝑒𝑓
Из этого уравнения мы можем вычислить обратную ЭДС: 𝑉𝑏𝑒𝑚𝑓 = 𝑉𝑟𝑒𝑓 + 𝑅1 × (1 + 140) × 2𝑅3
Как мы знаем из даташита Vref = 1V, поэтому: 𝐼𝑅2𝑅3 = 𝑉𝑏𝑒𝑚𝑓 – 𝑉𝑟𝑒𝑓𝑅1 × (1 + 140)
Для нашего мотора имеем: 𝐼𝑅2𝑅3 = 3.64–1390 × (1 + 140) 𝐼𝑅2𝑅3 = 0,0051𝐴 = 5,1𝑚𝐴
С помощью этого значения мы можем рассчитать последовательное сопротивление R2 и R3 : 𝐼𝑅2𝑅3 = 𝑉𝑟𝑒𝑓𝑅2 + 𝑅3𝑅2 + 𝑅3 = 𝑉𝑟𝑒𝑓𝐼𝑅2𝑅3𝑅2 + 𝑅3 = 195 Ом
Мы можем использовать постоянный стандартный резистор 150 Ом плюс потенциометр 100 Ом, что дает нам диапазон для точной настройки. Расчетные значения являются приблизительными, в реальной цепи ток внутреннего источника опорного напряжения также имеет значение (между 0,8 – 2 мА для AN6651), это вызовет изменение тока двигателя.
Добавление потенциометра позволяет установке регулировать скорость и должно быть откалибровано через некоторое время, чтобы двигатель прогрелся до рабочей температуры, чтобы минимизировать результирующий сдвиг сопротивления.
132-100 и AN6651 Цепь регулятора скоростиПрецизионные микроприводы 132-100 PCB с AN6651
Прецизионные микроприводы 132-100 PCB с AN6651
Регулятор скорости с дискретным операционным усилителем
Это улучшенная версия схемы операционного усилителя, описанной выше, с использованием специальной ИС.Основное улучшение – это работа при низком напряжении, благодаря использованию опорного сигнала с малой шириной запрещенной зоны. Использование этого дискретного компонента минимизирует размер схемы, что идеально подходит для современных небольших корпусов.
В этой схеме напряжение компенсации снимается с последовательного резистора R8 , значение которого меньше внутреннего сопротивления двигателя, чтобы уменьшить потери мощности. Вторая опора моста образована из R6 и R7 . Соотношение этих резисторов должно быть таким же, как R8 и сопротивление обмотки двигателя.В качестве типичного значения можно выбрать R8 , тогда для компенсации внутреннего падения напряжения следует выбрать R6 и R7 . Для стабильной работы коэффициент R7 / R6 должен быть больше Rm / R8 .
Эта схема должна подходить для небольших двигателей с номинальным напряжением 1 В ~ 2 В.
Схемана основе ОУ стабилизации скорости двигателя
Контроллер скорости на транзисторах
Эта недорогая схема построена на транзисторах для управления скоростью двигателя, хотя она не обеспечивает такой же точности, как операционный усилитель, ее можно сделать очень маленькой и полезной для недорогих приложений.
В этой схеме опорное напряжение составляет 1,2 В, и D1 работает как опорное напряжение. Обратная ЭДС двигателя больше опорного напряжения – в зависимости от делителя напряжения R2 , R3 и R4 :
- Во-первых, нам нужно установить коэффициент делителя напряжения, наше опорное напряжение составляет 1,2 В, а когда желаемая обратная ЭДС составляет 3,6 В, делитель напряжения R2 , R3 и R4 должен иметь коэффициент: 3.61,2 = 3
- Итак, у нас есть максимальный диапазон для точной настройки схемы, это нужно делать, когда потенциометр ( R3 ) находится в среднем положении. Теперь нам нужно разделить оставшееся значение между каждым из других резисторов.
- Когда мы знаем наш коэффициент делителя напряжения, выбрать R6 и R8 легко. Нам нужно иметь такое же соотношение между делителем напряжения R6 , R8 и внутренним сопротивлением двигателя.
Эта схема предназначена для одной постоянной скорости, и изменение скорости с помощью триммера влияет на компенсацию скорости.Таким образом, триммер следует использовать только для настройки этой схемы в диапазонах очень низких скоростей. Чтобы использовать эту схему с широким диапазоном настройки скорости, нам необходимо внести некоторые изменения:
Двухтранзисторный регулятор скорости двигателяТрехтранзисторный регулятор скорости двигателя
Эта схема работает по тем же правилам, что и предыдущая версия с двумя транзисторами, но основным улучшением является увеличение коэффициента усиления для опорного напряжения транзистором Q2 . Это позволяет нам использовать источник опорного напряжения с малой шириной запрещенной зоны, который более стабилен, чем стандартные диоды.Еще одним улучшением по сравнению с добавлением Q2 является температурная компенсация Vbe между транзисторами Q1 и Q2 .
Расчет этой схемы начинается с задания напряжения обратной ЭДС. В этой схеме опорное напряжение равно LM385 – 2,5 В и напряжение Vbe для Q2 : 𝑉𝑟𝑒𝑓 = 𝑉𝑏𝑔𝑟𝑒𝑓 + 𝑉𝑏𝑒 = 1,2𝑉 + 0,7𝑉 = 1,9𝑉
.Если нам нужно, чтобы напряжение Vbemf составляло 3,8 В, коэффициент делителя напряжения R2 , R4 и R3 должен быть 2: 1.Потенциометр ( R3 ) предназначен для точной настройки этого напряжения, но в этой схеме изменение скорости с помощью триммера вызовет изменение компенсации. Таким образом, R3 предназначен только для окончательной настройки скорости в небольшом диапазоне, скажем, 5% или меньше, и должен использоваться только для компенсации допуска других значений компонентов.
После установки этого делителя напряжения выбрать значение R6 и R7 легко, когда мы знаем внутреннее сопротивление двигателя. Эквивалентное параллельное соединение R6 , R7 и сопротивление двигателя должны иметь такое же соотношение, что и делитель напряжения R2 , R3 и R4 (с потенциометром R3 , установленным в среднее положение).
Прецизионные микроприводы Трехтранзисторный контроллер скорости двигателяПрецизионные микроприводы Трехтранзисторный контроллер скорости двигателя
Аналоговый регулятор скорости переключения режимов
В этой статье описывается простая реализация аналогового регулятора скорости двигателя, основанная на измерении обратной ЭДС и управляющем сигнале ШИМ.
При использовании ШИМ с двигателем постоянного тока все еще можно управлять скоростью двигателя без каких-либо датчиков. Используя типичный недорогой драйвер с одним полевым МОП-транзистором, можно измерить обратную ЭДС, когда двигатель вращается, а транзистор выключен.
Управление частотой вращения двигателя с использованием обратной ЭДС в режиме переключения аналоговая схемаЭтот контроллер состоит из модулятора ШИМ, выходного транзистора и схемы «выборки и удержания» (иногда известной как схемы «слежения и удержания»). Модулятор ШИМ имеет управляющий вход, который позволяет изменять рабочий цикл. Если вы не знакомы, это может показаться сложным, но общая идея довольно проста:
- , когда транзистор включен, напряжение питания подключено к клеммам двигателя, ток двигателя Im протекает через двигатель, заставляя его ускоряться
- , когда транзистор выключен, двигатель действует как генератор, а Vm равно до Vbemf , который пропорционален скорости двигателя.Срабатывает схема выборки и удержания, которая сохраняет выборку Vbemf в конденсаторе
. Узел суммирования затем вычисляет разницу между желаемой скоростью и текущей скоростью, поскольку обе представлены напряжением (желаемое напряжение и Vbemf соответственно). Это напряжение ошибки используется для управления скоростью двигателя путем увеличения или уменьшения рабочего цикла модулятора PWM.
Из-за индуктивной природы двигателей постоянного тока измерение обратной ЭДС невозможно сразу после выключения транзистора.Когда транзистор переключается, генерируется сильный индуктивный всплеск, и индуктивный рециркуляционный ток Ir протекает через реверсивный диод. Необходима небольшая задержка, пока напряжение обратной ЭДС не станет стабильным:
Измерение сигнала ШИМ на клеммах двигателяЭтот метод управления может быть выполнен с использованием только аналоговых компонентов или с помощью цифрового микроконтроллера. Практическая реализация контроллера, основанного на этом методе и использующего двигатель постоянного тока 132-100, показана ниже:
Регулятор скорости двигателя на основе измерения обратной ЭДС и выхода ШИМВ этой схеме напряжение на R2 представляет желаемую скорость, IC1A работает как усилитель ошибки и ПИД-регулятор.
Схема ШИМ-модулятора построена на IC1B и IC2 , где IC1B работает как генератор треугольных волн с частотой, определяемой R12 и C4 .
IC2 действует как компаратор, который сравнивает напряжение треугольного сигнала с выхода IC2 с установочным напряжением от потенциометра R15 . Когда напряжение сигнала треугольника ниже, чем напряжение от R15 , выход компаратора высокий, и двигатель запитан.
Схема выборки и удержания состоит из C3 , R10 , D2 , Q1 , R13 . Когда двигатель запитан от T1 , Q2 включен, а узел R13 и D2 закорочен на землю, что не позволяет ему сделать выборку, когда на двигатель подается напряжение Vcc. Диод D2 предотвращает разряд C3 , когда Q1 включен.
Когда T1 выключен, Q2 также выключен, и Vbemf может заряжать конденсатор C3 .Напряжение на C3 находится на неинвертирующем входе усилителя ошибки, IC1A . Этот усилитель вычитает текущее напряжение скорости из желаемого напряжения скорости (устанавливается потенциометром R2 ). Когда обратная ЭДС увеличивается, выходное напряжение на IC1A также увеличивается – это смещает уровень сигнала треугольника вверх пропорционально ошибке скорости. Если уровень сигнала треугольника увеличивается, то время, когда выходной транзистор включен, уменьшается, и коэффициент заполнения ШИМ также уменьшается.
Этот усилитель ошибки работает как схема ПИД-регулирования, где коэффициент усиления определяется как 5𝑅5 + 10, а постоянная времени определяется как R5 и C2 .
Схема выборки и хранения очень проста, потому что время выборки равно состоянию выключения в рабочем цикле ШИМ, поэтому напряжение выборки напрямую зависит от рабочего цикла. Кроме того, это менее важно, если схема используется для управления приложением, которое не использует полный диапазон скорости двигателя.Его также можно уменьшить по выбору, изменив значения R10 , C3 и R13 , которые позволяют изменять время заряда / разряда C3 .
Диапазон изменения рабочего цикла ШИМ (от приложенного напряжения ошибки) определяется соотношением R7 до R8 || R9 , однако, поскольку схема Sample & Hold настолько проста, этот диапазон не должен быть очень широким.
Эта схема предназначена для работы в малом диапазоне ШИМ, максимальная нагрузка ШИМ снижается за счет задержки индуктивной нагрузки двигателя, и с ограничением схемы выборки и удержания этот метод не следует использовать для широкого диапазона. диапазон регулирования скорости.
Это демонстрирует принцип работы, поэтому для практического использования настоятельно рекомендуется улучшить простую схему выборки и хранения. Например, схема на основе недорогого LF398 может обеспечить время выборки 10 мкс.
По сравнению с аналоговой схемой отрицательной обратной связи этот метод:
- снижает потери мощности
- может быть более стабильным, так как температура не влияет на напряжение обратной ЭДС (за счет изменения сопротивления обмотки)
Однако это также:
- не подходит для двигателей с высокой индуктивностью
- имеет узкий диапазон регулирования скорости
- имеет склонность к колебаниям
Информационный бюллетень
Подпишитесь, чтобы получать новые блоги, тематические исследования и ресурсы – прямо на ваш почтовый ящик.
Узнать больше
Ресурсы и руководства
Ознакомьтесь с замечаниями по применению наших продуктов, руководствами по дизайну, новостями и тематическими исследованиями.
Примеры из практики
Изучите нашу коллекцию тематических исследований, примеры нашей продукции в различных областях применения.
Прецизионные микроприводы
Нужен ли вам компонент двигателя или полностью проверенный и протестированный сложный механизм – мы всегда готовы помочь. Узнайте больше о нашей компании.
Подано в: С тегами:Методы регулирования скорости для различных типов двигателей с регулировкой скорости
Казуя ШИРАХАТА
Oriental Motor Co., Ltd. предлагает широкий выбор двигателей с регулировкой скорости. Наши комплекты двигателей с регулировкой скорости включают двигатель, привод (контроллер) и потенциометр, который позволяет легко регулировать скорость. Существует три группы продукции для двигателей с регулировкой скорости. «Блок управления скоростью переменного тока», в котором используется самый популярный однофазный асинхронный двигатель с конденсаторным приводом, небольшой и высокоэффективный «Бесщеточный двигатель постоянного тока» и «Инверторный блок», который объединяет трехфазный асинхронный двигатель с небольшой инвертор.В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
1. Введение
Большое количество двигателей используется для общих целей в нашем окружении, от домашнего оборудования до станков на промышленных предприятиях. Электродвигатель в настоящее время является необходимым и незаменимым источником энергии во многих отраслях промышленности. Эти двигатели имеют самые разные функции и характеристики.Сосредоточив внимание на сегменте управления скоростью на рынке двигателей, серводвигатели и шаговые двигатели управляют своей скоростью с помощью последовательности импульсов, в то время как асинхронный двигатель и бесщеточный двигатель постоянного тока регулируют скорость с помощью внешнего резистора и / или напряжения постоянного тока.
В этой статье объясняется структура, принцип управления скоростью и особенности следующих трех групп продуктов, которые могут относительно легко управлять скоростью с помощью аналогового входа.
- Электродвигатель и мотор-редукторы с регулировкой скорости переменного тока
- Бесщеточные двигатели постоянного тока и мотор-редукторы
- Инверторный блок
2.Методы управления скоростью различных двигателей с регулировкой скорости
Метод управления выходом схемы управления скоростью можно условно разделить на две группы: управление фазой и управление инвертором, которые составляют группы продуктов, показанные на рис. 1.
Рис.1 Классификация двигателей с регулировкой скорости
2.1. Двигатели переменного тока с регулировкой скорости
2.1.1. Конструкция двигателя
Как показано на рис. 2, конструкция однофазного и трехфазного асинхронных двигателей включает статор, на котором намотана первичная обмотка, и цельный алюминиевый ротор в форме корзины, отлитый под давлением.Ротор недорогой, потому что конструкция проста и не использует магнит.Рис. 2 Конструкция асинхронного двигателя
Когда необходимо контролировать скорость этого двигателя, для определения скорости используется тахогенератор, который присоединяется к двигателю, как показано на рис. 3. Тахогенератор состоит из магнита, подключенного непосредственно к валу двигателя. и катушка статора, которая обнаруживает магнитные полюса и генерирует переменное напряжение с частотой 12 циклов на оборот.Поскольку это напряжение и частота увеличиваются с увеличением скорости вращения, скорость вращения двигателя регулируется на основе этого сигнала.
Рис.3 Система электродвигателя с регулировкой скорости переменного тока
2.1.2. Принцип управления скоростью
Скорость вращения N асинхронного двигателя может быть выражена выражением (1). Когда напряжение, прикладываемое к двигателю, увеличивается и уменьшается, изменяется скольжение s , затем изменяется частота вращения N.
N = 120 · f · (1- s ) / P · · · · · · · · · · · (1)
N : частота вращения [об / мин]
F : частота 〔Гц〕
P : количество полюсов двигателя
S : скольжение
В случае асинхронного двигателя, показанного на рис. 4, на кривой «Скорость вращения – крутящий момент» существует стабильный диапазон и нестабильный диапазон. Поскольку невозможно надежно работать в нестабильном диапазоне, простое управление напряжением (управление разомкнутым контуром) ограничивается управлением скоростью в узком диапазоне, например N1 ~ N3 на рис.5. Чтобы обеспечить надежную работу даже в вышеупомянутом нестабильном диапазоне, необходимо определять скорость вращения двигателя и использовать механизм регулирования напряжения (управление с обратной связью), который снижает ошибку скорости по сравнению с установить значение.
Рис. 4 Частота вращения – крутящий момент асинхронных двигателей
Рис.5 Простое управление напряжением
Доступные методы управления напряжением включают управление трансформатором или управление фазой.На рис. 6 показано, когда напряжение регулируется с помощью трансформатора. Этот метод не так-то просто сделать с двигателем, регулирующим скорость переменного тока. В качестве альтернативы, напряжение переменного тока можно регулировать, задав время включения / выключения каждого полупериода переменного напряжения (50 или 60 Гц), подаваемого на двигатель, с помощью переключающего элемента (тиристора или симистора), который может напрямую включать и выключать переменный ток. напряжение, как показано на Рис. 7 и Рис. 8. Регулирование скорости достигается методом фазового регулирования путем управления среднеквадратичным значением значение переменного напряжения.
Рис.6 Изменение напряжения трансформатором
Рис.7 Изменение напряжения при фазовом управлении
Рис.8 Цепь управления симистором
Этот метод управления скоростью переменного тока может обеспечить устойчивое управление скоростью за счет регулирования фазы с обратной связью даже в нестабильном диапазоне.
На рис. 9 представлена блок-схема конфигурации системы управления скоростью двигателя переменного тока.
Рис. 9 Блок-схема системы электродвигателя с регулировкой скорости переменного тока
Рис.10 Форма сигнала для каждого блока
На рис. 10 показаны формы сигналов каждого блока. Установленное значение d скорости и обнаруженное напряжение e скорости, генерируемое тахогенератором, сравниваются в блоке усилителя сравнения. Затем определяется уровень сигнала напряжения , .
Сигнал напряжения a является низким, когда обнаруженное значение скорости до заданного значения скорости увеличивается, и выше, когда заданное значение скорости уменьшается.Поскольку триггерный сигнал выводится в точке, где треугольная волна b, пересекается с сигналом напряжения a, , определяется синхронизация (фазовый угол), когда симистор включен, с уровнем сигнала напряжения a, . Когда это время является медленным, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается. Пониженная скорость вращения возвращается снова, и управление повторяется, так что разница между определенным значением скорости и установленным значением скорости всегда может быть постоянной.
На рис. 11 показан внешний вид упомянутого выше регулятора скорости. На рис. 11 рабочая точка двигателя образует контур Q-R-S-T-Q с центром на O, и скорость вращения поддерживается между N1 и N2. Этот цикл максимально сокращен за счет повышения точности определения скорости.
Рис.11 Работа регулятора скорости
Двигатель с регулировкой скорости переменного тока имеет следующие особенности при использовании этого регулирования фазы с обратной связью.
1) Поскольку напряжение переменного тока регулируется напрямую, схема управления скоростью может быть сконфигурирована просто потому, что схема сглаживания не нужна, что позволяет получить компактную конструкцию по низкой цене.
2) Таким же образом возможна долговечная конструкция, поскольку нет необходимости в большом алюминиевом электролитическом конденсаторе.
3) Переключение срабатывает только один раз в течение каждого полупериода промышленного источника переменного тока, что снижает уровень генерируемого шума.
2.1.3. Характеристики
Двигатели с регулировкой скорости вращения электродвигателя переменного тока обычно имеют характеристики «Скорость вращения – крутящий момент», показанные на рис.12.
Рис. 12 Характеристики крутящего момента и скорости вращения
«Строка безопасной эксплуатации» приведена на рис. 12. «Строка безопасной эксплуатации» представляет собой ограничение, при котором двигатель может работать в непрерывном режиме без превышения максимально допустимой температуры.
2.2. Бесщеточный блок управления скоростью постоянного тока
2.2.1. Конструкция двигателя
Что касается конструкции бесщеточного двигателя, катушка соединена звездой (Y-разводкой) с тремя фазами: U, V и W и расположена в статоре, а ротор состоит из магнитов. намагниченный в многополюсной конфигурации, как показано на рис.14.
Внутри статора три ИС Холла расположены как магнитные элементы, так что разность фаз выходного сигнала от каждой ИС Холла будет составлять 120 градусов при каждом повороте ротора.
Рис. 14 Конструкция бесщеточного двигателя постоянного тока
2.2.2. Принцип управления скоростью
Как показано на рис. 15, характеристики вращательной скорости-момента бесщеточного двигателя постоянного тока показывают отрицательную наклонную характеристику, когда его скорость не контролируется, что аналогично тому, как у щеточного двигателя постоянного тока.
Рис. 15 Характеристики скорости вращения бесщеточного двигателя постоянного тока
Когда нагрузка не приложена и входное напряжение установлено на V2 на рисунке 15, рабочая точка двигателя становится P, а скорость вращения равна N1. Когда прикладывается крутящий момент T1 нагрузки, рабочая точка смещается к Q, а скорость вращения снижается до N2, однако скорость вращения возвращается к N1, если напряжение повышается до V3. Следовательно, поскольку скорость вращения изменяется всякий раз, когда изменяется крутящий момент нагрузки, механизму управления скоростью нужно будет только изменять входное напряжение всякий раз, когда наблюдается изменение скорости, чтобы поддерживать постоянную скорость на линии PR.
Этот контроль напряжения реализуется инвертором в выходной части схемы управления (драйвера). Этот инвертор генерирует трехфазное переменное напряжение из постоянного тока путем включения и выключения, как в последовательности, показанной на рисунке 16 (b), с использованием шести переключающих элементов (FET или IGBT), показанных на рисунке 16 (a).
Рис. 16 (a) Выходная часть схемы управления (драйвер)
Рис.16 (b) Последовательность переключения
Переключающие элементы подключены к обмотке двигателя, как показано на рис.16 (a), а состояние ВКЛ / ВЫКЛ переключающего элемента определяет, какая катушка статора находится под напряжением и в каком направлении будет течь ток, то есть какая катушка станет полюсом N или полюсом S.
Фактически, положение магнитного полюса ротора определяется ИС Холла, и соответствующий переключающий элемент включается или выключается, как показано на Рис. 16 (b). Например, в случае шага 1 транзисторы Tr1 и Tr6 включаются, и ток течет из фазы U в фазу W. В это время U-фаза возбуждается как полюс N, а фаза W становится полюсом S, и ротор поворачивается на 30 градусов, переходя к шагу 2.Один оборот ротора выполняется повторением этой операции 12 раз (шаги 1 ~ 12).
На фиг. 17 показана конфигурация для управления скоростью бесщеточного двигателя постоянного тока в виде блок-схемы.
Рис.17 Блок-схема системы бесщеточного двигателя постоянного тока
Последовательность переключения инвертора определяется сигналом от ИС Холла в части определения положения на блок-схеме, и двигатель вращается.
Затем сигнал от ИС Холла отправляется на датчик скорости, чтобы стать сигналом скорости, и он сравнивается с сигналом установки скорости в блоке усилителя сравнения, который затем генерирует сигнал отклонения.Значение входного тока двигателя определяется блоком настройки ШИМ на основе сигнала отклонения.
Бесщеточные двигатели постоянного тока имеют следующие особенности.
1) Он имеет высокий КПД, поскольку используется ротор с постоянными магнитами и вторичные потери малы.
2) Инерция ротора может быть уменьшена, и достигается высокая скорость реакции.
3) Можно уменьшить размер двигателя, потому что он очень эффективен.
4) Колебания скорости при изменении нагрузки незначительны.
Фиг.16 показана типичная последовательность переключения (метод подачи напряжения на 120 градусов). Еще более эффективная система бесщеточного двигателя постоянного тока использует метод возбуждения синусоидальной волны, получая информацию о положении ротора с высоким разрешением из программного обеспечения из сигнала IC Холла. Этот метод обеспечивает малошумный метод управления двигателем, поскольку ток, протекающий через двигатель, не изменяется быстро. (2)
Рис. 18 Сравнение напряжений, прикладываемых с помощью метода возбуждения синусоидальной волны и метода возбуждения 120 градусов
2.2.3. Характеристики
Характеристики скорости вращения и крутящего момента бесщеточного двигателя постоянного тока имеют ограниченную область нагрузки в дополнение к области непрерывной работы.
Ограниченная рабочая зона очень эффективна при запуске инерционной нагрузки. Однако, когда работа в ограниченном режиме работы продолжается в течение пяти секунд или более, срабатывает функция защиты водителя от перегрузки, и двигатель замедляется до полной остановки.
2.3. Блок управления скоростью инвертора
2.3.1. Принцип управления скоростью
Инверторный блок управляет скоростью трехфазного асинхронного двигателя, изменяя частоту f напряжения, подаваемого на двигатель. Инверторный блок изменяет частоту f, изменяя цикл включения / выключения шести переключающих элементов, а скорость вращения (N) двигателя изменяется пропорционально выражению в формуле (1).
N = 120 · f · (1- s ) / P ·· · · · · · · · · · (1)
N : частота вращения [об / мин]
F : частота 〔Гц〕
P : количество полюсов двигателя
S : скольжение
Кроме того, чтобы напряжение, подаваемое на обмотку, имело синусоидальную форму, инвертор регулирует рабочий цикл включения / выключения, как показано на рис.21. Время включения / выключения регулируется таким образом, что среднее напряжение, приложенное к двигателю, приобретает форму синусоиды, путем сравнения треугольной волны, называемой несущим сигналом, с формой сигнала синусоидальной формы. Этот метод называется ШИМ-управлением.
Рис.19 Дежурный контроль ВКЛ / ВЫКЛ
Метод управления скоростью наших инверторных блоков делится на два типа: управление с обратной связью, которое просто изменяет скорость, и управление с обратной связью, которое уменьшает изменение скорости при изменении нагрузки двигателя.
1) Управление без обратной связи
На рис. 22 показана конфигурация управления без обратной связи в виде блок-схемы.
Рис.20 Блок-схема управления без обратной связи
Этот метод используется для изменения входного напряжения и частоты двигателя в соответствии с заданной частотой. Этот метод подходит для изменения скорости и может достигать высоких скоростей (частоту можно установить до 80 Гц.) Просто тогда, когда регулирование скорости с изменяющимися нагрузками не представляет особой важности.
Создаваемый крутящий момент T двигателя показан формулой (2).Из этого соотношения можно сказать, что крутящий момент также будет постоянным, если сделать постоянным V / f, отношение напряжения V к частоте f.
T = K ・ I ・ V / f ・ ・ ・ (2)
T : Крутящий момент [Н · м]
V : Напряжение источника питания [В]
I : Ток двигателя [A]
f : Частота [Гц]
K : Постоянная
Однако чем ниже скорость, тем труднее поддерживать постоянным входное сопротивление асинхронного двигателя при изменении f.Следовательно, чтобы получить постоянный крутящий момент от низкой скорости к высокой скорости, необходимо отрегулировать отношение V / f на низкой скорости в соответствии с характеристиками двигателя, как показано на рисунке 23 сплошной линией.
Рис.21 V / f Control
2) Управление с обратной связью
На рис. 24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF.
Рис.22 Блок-схема управления по замкнутому контуру
Этот метод определяет разность фаз между напряжением выходного блока инвертора и первичным током, который вычисляет частоту возбуждения, соответствующую нагрузке, с использованием таблицы данных характеристик (рис.25), подготовленный заранее, и регулирует частоту инвертора без необходимости в датчике скорости на двигателе.
Рис.23 Таблица характеристик и данных
Используя эту таблицу характеристик и время t обнаруженной разности фаз, инвертор вычисляет выходную частоту инвертора, которая соответствует команде Nset скорости вращения, установленной потенциометром скорости, и выводит ее как выходную частоту инвертора. После получения выходной частоты блок управления U / f вычисляет напряжение, приложенное к двигателю, соответствующее выходной частоте f, и выполняет управление скоростью, управляя инвертором PWM.В результате при приложении нагрузки выходная частота инвертора увеличивается, так что уменьшение скорости вращения может быть компенсировано. (3)
2.3.2. Характеристика с
Характеристики скорости вращения-момента инверторного блока показаны на рис. 26 и 27. Как объяснено в разделе, посвященном двигателю, регулирующему скорость переменного тока, на характеристике крутящего момента нарисована «линия безопасной работы». Эта линия представляет предел для непрерывной работы, а область под этой линией называется областью непрерывной работы.
Рис.24 Характеристики скорости вращения и момента для управления без обратной связи
Рис.25 Характеристики скорости вращения и момента для замкнутого контура управления
3. Резюме
Oriental Motor предлагает три группы продуктов (двигатели с регулированием скорости переменного тока, бесщеточные двигатели с регулировкой скорости постоянного тока и инверторные блоки) для использования в широком диапазоне приложений регулирования скорости. Подходящий продукт для регулирования скорости можно выбрать в соответствии с функцией, производительностью, стоимостью и целью, которые требуются для вашего приложения.
Oriental Motor продолжит работу над разработкой продуктов, чтобы в будущем мы могли предлагать продукты, наилучшим образом отвечающие различным потребностям наших клиентов.
Список литературы
(1) Исследовательская группа по технологиям двигателей переменного тока: «Книга для понимания малых двигателей переменного тока», Kogyo Chosakai Publishing (1998)
(2) Казуо Абэ: «Технология бесшумного привода бесщеточного двигателя», RENGA № 163, стр. 19-25 (2003)
(3) Кодзи Намихана, Масаёши Сато: «Новый метод управления трехфазным асинхронным двигателем», RENGA No.159, стр. 23-28 (1999)
| Кадзуя Сирахата Завод Цуруока, Операции ACIX Подразделение схемотехники Секция разработки схем |
Схема управления скоростью двигателя постоянного тока
Введение:В этой короткой статье мы узнаем, как сформировать цепь отрицательной обратной связи по скорости двигателя постоянного тока. В основном мы выясняем, как работает схема и что насчет сигнала ШИМ? и способ использования сигнала ШИМ для регулирования скорости двигателя постоянного тока.
Концепция:Двигатель постоянного тока может быть чисто индуктивной нагрузкой, поэтому, если вы хотите регулировать скорость двигателя постоянного тока, мы должны повышать / понижать напряжение для более высоких / более низких скоростей. но практически при более высоком напряжении и более низком напряжении это невозможно, поэтому в этом случае мы используем другой метод, который называется ШИМ, лучше называемый широтно-импульсной модуляцией.
Видео на YouTube:Посмотрите видео на YouTube, чтобы получить пошаговое руководство.
Схема цепи:Вот схема цепи отрицательной обратной связи скорости двигателя постоянного тока.
Что такое ШИМ?Слово ШИМ дополнительно называется широтно-импульсной модуляцией. Предположим, что есть напряжение в 5 вольт, которое периодически включается и выключается. Этот сигнал включения / выключения особенно представлен в виде рабочих циклов, если при выходном напряжении 50% рабочий цикл будет составлять 50% от 5 вольт, поэтому оно будет почти 2,5 вольт. Рабочий цикл часто составляет 25% от пятидесяти или 90% или, возможно, 100%. Итак, теперь вы рассчитаете, каким будет напряжение, когда рабочий цикл будет в течение определенного процента.Теперь эти импульсы ШИМ запускают транзистор и двигатель.
Как работает цепь отрицательной обратной связи скорости двигателя?Это действительно простая схема, сделанная из микросхемы таймера 555, которая может генерировать прямоугольные импульсы.
Существует множество дополнительных компонентов для генерации импульсов ШИМ от микросхемы таймера 555.
для изменения скважности импульсов ШИМ мы используем потенциометр 100К.
Вывод № 3 микросхемы таймера 555 обеспечивает импульсы ШИМ, эти импульсы недостаточно сильны для запуска двигателя постоянного тока.Итак, мы хотели бы попытаться усилить сигнал.
Для усиления схемы мы использовали N-канальный MOSFET IRFZ44N. Вывод затвора полевого МОП-транзистора соединен с выводом № 3 таймеров 555 через резистор.
Когда полевой МОП-транзистор получает импульсы с высокой ШИМ, тогда рабочий цикл должен быть высоким, это означает, что больший ток будет из-за истощения источника, поэтому в этом случае двигатель будет ускоряться с максимальной скоростью.
То же самое происходит, когда импульс ШИМ низкий.в пределах низких рабочих циклов транзистор будет переключаться на очень низкую частоту. Таким образом, по этой причине скорость двигателя в этом случае будет низкой.
Примечание:Здесь я даже использовал полевой МОП-транзистор с n каналом IRFZ44N, который способен работать с большим током. Но вы также будете использовать любые N-канальные полевые МОП-транзисторы. Номинальная сила тока также может быть очень высокой для других полевых МОП-транзисторов. ИС таймера
555 требует постоянного напряжения, поэтому здесь я даже использовал микросхему 7805 для постоянного напряжения от 7 до 35 вольт.вы также будете использовать любое напряжение, например, от 5 до 15 вольт для этой микросхемы таймера 555.
Я подключил диод параллельно двигателю. это часто используется для защиты двигателя от электромагнитных полей сзади. это не может повредить МОП-транзистор от обратной ЭДС. часто это обязательно.
| PIC16F873 В схеме на этот раз используется PIC16F873. В схеме на этот раз управление электрическим током привода двигателя осуществляется с помощью функции ШИМ КПК.Напряжение в соответствии с числом оборотов двигателя подается в аналого-цифровой преобразователь и управляется электрическим током привода. На этот раз для определения скорости используется двигатель. Кроме того, светодиоды монитора загораются, чтобы узнать состояние моторного привода. Трехконтактный регулятор (7805) Транзистор для привода MOS FET (2SC1815) Полевой МОП-транзистор (2SK3142) Стабилитрон (RD5A) Максимальное напряжение, подаваемое на вывод PIC, составляет + 5В. Этот диод предотвращает разрушение PIC, когда напряжение определения скорости двигателя превышает 5 В. Когда напряжение больше + 5В не подается извне, в этом нет необходимости. Диодный мост для защиты полярности напряжения определения скорости (W02G) Разъем IC Резонатор Переменный резистор для настройки скорости двигателя Резистор Многослойный керамический конденсатор Печатная плата Универсальная печатная плата с размерами залов 15х25. Разъем для светодиодов и переменного резистора для установки скорости мотора Сначала я планировал использовать коннекторы для установки светодиодов и переменного резистора для настройки скорости мотора на крышке корпуса. Однако, поскольку его невозможно разместить в корпусе, я решил использовать клеммы для проводки. Клемма для подключения Эта клемма используется для подключения провода источника питания и нагрузки. Шпилька Используется в качестве ножки печатной платы.
Двигатель для определения скорости На этот раз в схеме определение скорости основного двигателя выполняется с помощью двигателя для определения. Я использую RE-280 производства MABUCHI MOTOR Inc. в Японии. Технические характеристики этого двигателя показаны ниже.
При выполнении поворота со скоростью, равной скорости основного двигателя, она превышает указанные выше характеристики. Генерируемое напряжение превышает спецификацию, но я думаю, что это не проблема, потому что электрический ток почти не течет.Строго говоря, проблема с изоляцией, потому что она становится выше указанного в спецификации. Однако мне кажется, что это не помеха, потому что это не высокое напряжение. Мотор с металлической фурнитурой Мотор представляет собой цилиндр и винт для фиксации мотора вынесен вперед. При установке мотора на панель и так далее можно использовать эти отверстия. На этот раз я использовал металлическую фурнитуру, в которую вставлен мотор. Шестерня Эти шестерни используются для соединения между главным двигателем и двигателем для определения скорости.На этот раз, поскольку он предназначен для подтверждения работы управления скоростью двигателя, главный двигатель вращает только двигатель для определения скорости. Светодиоды для отображения состояния моторного привода (GL-107S12) Это светодиод для отображения гистограммы, в которую включены семь светодиодов. Схема управления может управлять восемью светодиодами. Поскольку получить индикатор с восемью светодиодами не удалось, я решил использовать индикатор с семью светодиодами. Однако при использовании в качестве измерителя уровня необходимо семь светодиодов. Клемма подключения двигателя Это клемма, которая соединяет главный двигатель и двигатель определения скорости. Разъем источника питания Это разъем для подключения питания. Адаптер переменного тока Ручка для установки скорости |
