
Управление двигателем постоянного тока – схема и важные нюансы
Двигатель постоянного тока способствует превращению энергии постоянного тока в работу механического типа.
На сегодняшний день практичное управление двигателем постоянного тока осуществляется не только в соответствии с традиционными схемами, но также согласно достаточно оригинальным или малоизвестным схемотехническим решениям.
Схема управления двигателем постоянного тока
Самым простым способом регулировки скорости двигательного вращения является применение модуляции (РWМ) широтно-импульсного типа, или ШИМ.
Данный способ базируется на подаче питающего напряжения на движок в форме импульсов со стабильной частотой следования, но изменением длительности.
Вся ШИМ-сигнальная система имеет очень важный критерий, представленный коэффициентом стандартного заполнения (Duty сyсlе).
Такая величина соответствуют соотношению импульсной длительности к его периоду:
D = (t/Т) × 100 %
Для самой простой схемы реализации управления ДПТ характерно наличие полевой транзисторной части с подачей на затвор ШИМ-сигнальной системы. В подобной схеме транзистор представляет особый электронный ключ, которым один из двигательных выводов коммутируется на землю. В этом случае открытие полупроводникового триода осуществляется именно на момент импульсной длительности.
В подобной схеме транзистор представляет особый электронный ключ, которым один из двигательных выводов коммутируется на землю. В этом случае открытие полупроводникового триода осуществляется именно на момент импульсной длительности.
Конструкция двигателя постоянного тока
При низкой частоте и в условиях незначительного коэффициента ШИМ-сигнала преобразующее устройство срабатывает рывками. Высокая частота РWМ, составляющая несколько сотен Герц, способствует непрерывному вращению мотора, а скорость вращательного движения в этом случае изменяется строго пропорционально коэффициенту заполняемости.
Известно множество схематичных решений, генерирующих ШИМ-сигнал, но к числу наиболее простых относится «схема таймера 555», нуждающаяся в минимальном количестве компонентов и не требующая особой настройки.
Управление двигателем при помощи биполярного транзистора
Использование биполярного транзистора в качестве надежного переключателя — один из способов управления двигателем. Выбор пассивного элемента электрической цепи, или R, предполагает протекание тока, не превышающего показатели максимальных токовых величин в микроконтроллере.
Выбор пассивного элемента электрической цепи, или R, предполагает протекание тока, не превышающего показатели максимальных токовых величин в микроконтроллере.
Полупроводниковый триод должен иметь соответствующий коллекторный ток и оптимальные максимальные значения, а также выделяемую мощность:
P = Uкэ × Iк .
Одной из проблем, возникающих в процессе использования биполярных полупроводниковых триодов, является избыточный базовый ток.
Схема управления
Как правило, токовое соотношение на выходном сигнале и входном транзисторе составляет 100 hfe. Функционирование элемента в условиях насыщения вызывает сильное снижение коэффициента.
Оптимальным вариантом является транзисторное комбинирование, или высокоэффективный транзистор Дарлингтона, который характеризуется высокими показателями токового усиления и незначительной скоростью работы.
Индуктивные нагрузки
При выборе индуктивной нагрузки, представленной двигателем, решение проблемы режима плавного управления мощностными показателями мотора не всегда дается легко, что зависит от нескольких факторов, представленных:
- мощностными показателями движка;
- инерционностью нагрузочного уровня вала;
- реактивными обмоточными показателями;
- активными обмоточными показателями.

Управление двигателями постоянного тока
Оптимальным вариантом для решения практически всех перечисленных выше проблем является использование частотных инверторов.
Индуктивный тип схемы для управления двигателем ПТ не отличается особой сложностью по сравнению с частотным управлением, а также способен обеспечивать вполне приемлемую результативность.
Аспекты проблем при управлении двигателем ПТ
Качественное управление нагрузкой не требует в некоторых случаях потенциометра, а может быть задействовано на использовании микроконтроллера.
Наиболее важные проблемы управления представлены:
- обязательным присутствием гальванической развязки;
- плавным управлением мощностными показателями;
- отсутствием старт-стопного типа управления;
- контролированием перехода Zеrо — Сrоss;
- некоторыми особенностями подбора RC-фильтра snubbеr сглаживающего типа.
Важно помнить, что данная схемотехника отличается незначительной сложностью, при которой инициализация микроконтроллера требует достаточного количества времени, что обусловлено конкретно решаемыми задачами при нахождении выходных сигналов в третьем состоянии.
Управление при помощи MOSFET транзистора
МОSFЕТ (mеtаl-охidе-sеmiсоnduсtоr fiеld еffесt trаnsistоr) — полевые полупроводниковые триоды или метал-окисел-полупроводники p-канального типа открываются на затворе отрицательным напряжением по отношению к источнику. Диод паразитного типа в канальной структуре анода подсоединяется к части стока, а катод соединяется с истоком.
Классическая схема включения MOSFET в ключевом режиме
Такой тип канала, как правило, подсоединяется таким образом, чтобы на сток приходились наиболее отрицательные показатели напряжения по сравнению с истоком.
MOSFET-транзисторы высокой степени мощности достаточно популярны, что обусловлено исключительно высокой переключательной скоростью в условиях низкого уровня мощности управления, прикладываемой к затвору.
Управление при помощи реле
Процесс управления достаточно мощным двигателем ПТ осуществляется посредством реле-модуля спаренного типа. Процесс подключения мотора к реле предполагает обязательный учет наличия трех выходных отверстий:
- NО (Nоrmаlly ореn) — нормально-разомкнутого типа;
- СОМ (Соmmоn) — общего типа;
- NС (Nоrmаlly сlоsеd) — нормально-замкнутого типа.

Управление направлением вращения двигателя постоянного тока
Контактная группа устройства, преобразующего любой вид энергии в работу механического типа, подсоединяется к общим релейным контактам (СОМ). «Плюс» элемента питания подключается к контактам нормально-разомкнутого реле (NО), а «минус» фиксируется на контактной группе реле нормально-замкнутого типа (NС).
Реализация полного мостоуправления двигателя осуществляется при включении и выключении реле соответствующим образом.
При помощи H-моста
Управление двигателем посредством H-моста с управляющими логическими сигналами на входах и вращением в две стороны осуществляется несколькими вариантами Н-мостов:
- транзисторным H-мостом, простым в изготовлении и достаточно мощным. К недостаткам можно отнести риск короткого замыкания при подаче на два входа;
- двойным H-мостом, собранным на маломощной микросхеме. Минусы данного варианта представлены слишком малой мощностью и необходимостью подключения вывода Е на питании к «плюсу»;
- одиночным Н-мостом, собранным на микросхеме, что обеспечивает подачу единички на два входа и может стать причиной торможения работы двигателя.

Транзисторный Н-мост
Самым простым вариантом станет сборка Н-моста на МОSFЕT-транзисторах. Именно этот способ сочетает в себе легкость выполнения и достаточные показатели мощности, но не предполагает одновременную подачу на две единицы.
Известно множество вариантов микросхем, используемых для управления двигателем, включая ТLЕ4205 и L298D, а также стандартные электромагнитные реле, но перечисленные выше способы относятся к категории самых доступных.
Управление шаговым двигателем
Для управления двигателем шагового типа необходима подача постоянного напряжения на обмоточную часть с соблюдением максимально точной последовательности, благодаря чему обеспечивается точность угла осевого поворота.
При наличии постоянных магнитов
Шаговые двигатели, имеющие постоянные магниты, чаще всего применяются в бытовых приборах, но могут встречаться в устройствах промышленного типа. Доступные по стоимости двигатели обладают низким крутящим моментом и низкой скоростью вращения, благодаря чему прекрасно подходят для компьютеров.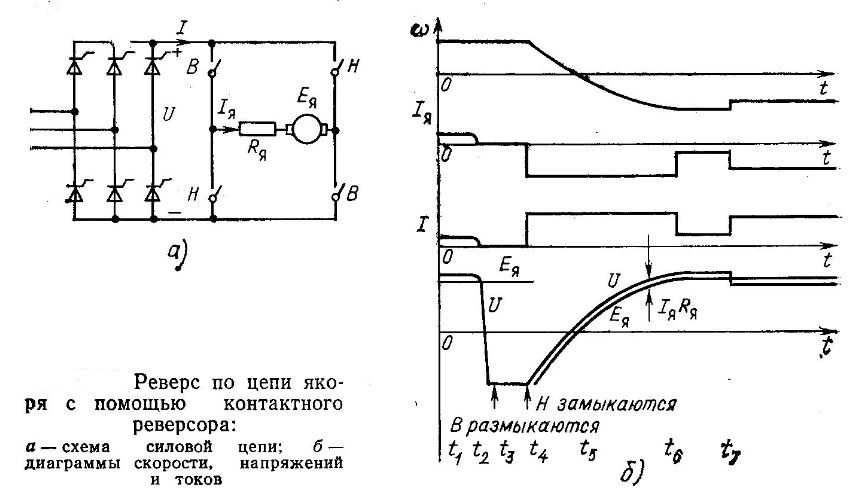
Управление шаговым двигателем
Изготовление двигателей шагового типа на основе постоянных магнитов не отличается сложностью и экономически целесообразно только при больших объемах производства, а ограниченность использования обусловлена относительной инертностью и неприемлемостью применения в условиях точного временного позиционирования.
При наличии переменного магнитного сопротивления
Шагового типа двигатели, имеющие переменное магнитное сопротивление в условиях отсутствия стабильного магнита, характеризуются свободным роторным вращением без крутящего вращения остаточного типа. Такие двигатели, как правило, устанавливаются в компактных агрегатах, включая системы микро-позиционирования. Основные достоинства такой схемы представлены чувствительностью к токовой полярности.
Гибридный вариант
Гибридного типа двигатели в настоящее время относятся к категории наиболее популярных агрегатов в сфере промышленности.
Вариант характеризуется очень удачным сочетанием принципа работы моторов с переменными и постоянными магнитами.
Значительное количество двигателей гибридного типа отличается классическим двухфазным строением.
Заключение
Необходимость выполнять изменение полярности напряжения может возникать в процессе управления двигателем или при использовании схемы мостового преобразователя напряжения. В этом случае ключи чаще всего представлены реле, полевыми и биполярными транзисторами, а также H-мостами, встраиваемыми в микросхему.
Типовые схемы управления приводами с двигателями постоянного тока
Типовые схемы управления приводами с двигателями постоянного тока
Схема управления двигателем постоянного тока с параллельным, возбуждением (рис. 74). Якорь двигателя включается контактами контакторов 1В и 2В или 1Н и 2Н. Последовательно с якорем включаются пусковые сопротивления, являющиеся в данной схеме одновременно регулировочными. Каждая пусковая ступень может быть зашун тирован а соответствующим контактом контакторов ускорения 1У, 2У и ЗУ. Включение якорной цепи осуществляется контактом линейного контактора Л. Параллельно якорю двигателя посредством з. к. контактора Т подключается сопротивление динамического торможения. Кроме того, параллельно якорю присоединяется катушка реле динамического торможения РДТ. Обмотка возбуждения двигателя ОВ при отключении от сети замыкается на разрядное сопротивле-
74). Якорь двигателя включается контактами контакторов 1В и 2В или 1Н и 2Н. Последовательно с якорем включаются пусковые сопротивления, являющиеся в данной схеме одновременно регулировочными. Каждая пусковая ступень может быть зашун тирован а соответствующим контактом контакторов ускорения 1У, 2У и ЗУ. Включение якорной цепи осуществляется контактом линейного контактора Л. Параллельно якорю двигателя посредством з. к. контактора Т подключается сопротивление динамического торможения. Кроме того, параллельно якорю присоединяется катушка реле динамического торможения РДТ. Обмотка возбуждения двигателя ОВ при отключении от сети замыкается на разрядное сопротивле-
Пуск двигателя «Вперед» осуществляется путем включения контактов командоконтроллера К1, К2, К4, К5 и Кб. При этом включаются линейный контактор Л, контакторы 1В, 2В и двигатель подключается в сеть
через пусковое сопротивление. После срабатывания контактора Л катушка реле ускорения 1РУ теряет питание. Одновременно через замыкающий бло-7 кировочный контакт 1В подается питание на К4, К5 и Кб. Контактор ускорения 1У срабатывает через интервал, определяемый выдержкой времени реле 1РУ. После срабатывания контактора 1У накоротко замыкается, катушка реле ускорения 2РУ, которая находилась под напряжением, равным падению напряжения на первой ступени пускового со-контактах К5 и Кб времени замыкаются лучает питание. Контактор Т, сработав, замыкает якорь двигателя на сопротивление и двигатель переходит в режим динамического торможения, которое заканчивается при 10—20% номинальной скорости двигателя.
Контактор ускорения 1У срабатывает через интервал, определяемый выдержкой времени реле 1РУ. После срабатывания контактора 1У накоротко замыкается, катушка реле ускорения 2РУ, которая находилась под напряжением, равным падению напряжения на первой ступени пускового со-контактах К5 и Кб времени замыкаются лучает питание. Контактор Т, сработав, замыкает якорь двигателя на сопротивление и двигатель переходит в режим динамического торможения, которое заканчивается при 10—20% номинальной скорости двигателя.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Рис. 74. Схема управления двигателем постоянного тока парал-лельного возбуждения
При замкнутых последовательно с выдержкой контакты 2РУ и ЗРУ, которые соответственно включают катушки контакторов ускорения 2У и ЗУ; эти контакторы шунтируют своими контактами ступени ускорения. Двигатель будет работать на естественной характеристике.![]() Включение двигателя для работы «Назад» производится поворотом рукоятки командоконтроллера в направлении, противоположном направлению при пуске вперед. Процесс пуска при этом протекает аналогично.
Включение двигателя для работы «Назад» производится поворотом рукоятки командоконтроллера в направлении, противоположном направлению при пуске вперед. Процесс пуска при этом протекает аналогично.
Во время работы двигателя реле РДТ находится под напряжением, замыкающий контакт РДТ в цепи катушки контактора Т закрыт, но в это время один из размыкающих контактов 2Н или 2В открыт. При отключении двигателя от сети контакты 2В или 2Н закрываются и, так как закрыт контакт РДТ, катушка контактора Т по-
Защита двигателя осуществляется максимальным реле РМ и реле напряжения РН.
Схема управления двигателем постоянного тока, работающим в системе генератор — двигатель (рис. 75). Рассматриваемая схема обеспечивает работу двигателя для одного направления вращения и позволяет производить торможение в режиме генераторного торможения с отдачей энергии в сеть при остановке привода.
Пуск двигателя начинается с подключения цепи управления к источнику постоянного тока. Вследствие подачи питания к цепи управления реле РОП срабатывает и закрывает свои замыкающие контакты в цепи кнопки «Пуск».
Обмотка контактора 2Л включается автоматически (поскольку обмотка реле 1РП замкнет свой контакт в цепи катушки 2Л), в результае чего включается и контакты контактора 2Л. Одновременно под напряжением окажется обмотка реле РУП.
Контактор 2Л подключает обмотку возбуждения генератора ОВГ к источнику постоянного тока. В обмотке ОВГ возникает ток, а на зажимах генератора э. д. с. В Цепи якорей двигателя и генератора будет проходить ток. Двигатель разгоняется до скорости, обусловленной положением движка реостата РВГ, регулирующего величину тока возбуждения генератора.
Реле РУП имеет две обмотки: одну — последовательную, включенную в цепь якоря двигателя, и другую — параллельную, подключенную к источнику постоянного тока. Намагничивающие силы, создаваемые этими обмотками, направлены встречно. Пока ток в цепи якоря не превосходит допустимого значения, якорь реле удерживается за счет действия параллельной обмотки; при этом замыкающие контакты реле замкнуты и в цепи ОВГ включена только часть сопротивления РВГ, заключенная между точками а и б. Если ток якоря превосходит допустимое значение, то н. с. (намагничивающая сила) последовательной обмотки нейтрализует н. с. параллельной обмотки и якорь реле отпадает. Замыкающие контакты реле РУП ра‘змыкаются, в цепь обмотки возбуждения вводится все сопротивление реостата РВГ. В результате этого уменьшается темп нарастания э. д, с. генератора, дальнейшее увеличение тока якоря предотвращается.
Пока ток в цепи якоря не превосходит допустимого значения, якорь реле удерживается за счет действия параллельной обмотки; при этом замыкающие контакты реле замкнуты и в цепи ОВГ включена только часть сопротивления РВГ, заключенная между точками а и б. Если ток якоря превосходит допустимое значение, то н. с. (намагничивающая сила) последовательной обмотки нейтрализует н. с. параллельной обмотки и якорь реле отпадает. Замыкающие контакты реле РУП ра‘змыкаются, в цепь обмотки возбуждения вводится все сопротивление реостата РВГ. В результате этого уменьшается темп нарастания э. д, с. генератора, дальнейшее увеличение тока якоря предотвращается.
Рис. 75. Схема управления двигателем постоянного тока в системе Г—Д
Для остановки двигателя нажимают на кнопку «Стоп». При этом параллельная катушка реле РУП теряет питание. Контакты реле размыкаются, и в обмотку возбуждения генератора вводится все сопротивление РВГ. Поскольку обмотка возбуждения остается включенной (питание катушки контактора 2JJ осуществляется в этом случае через контакты реле 2РП), ток в ней начинает убывать. Электродвижущая сила генератора уменьшается и, когда она окажется меньше э. д. с. двигателя, возникнет режим генераторного торможения с отдачей энергии в сеть. Двигатель начнет останавливаться. При снижении напряжения генератора до определенного значения отпадает якорь реле 2РП. Его замыкающие контакты отключают обмотку контактора 2Л, что приводит к тому, что замыкающие контакты 2Л отключат ОВГ от сети постоянного тока, а размыкающие Замыкаются и подсоединяют эту обмотку к якорю генератора. Вследствие изменения полярности напряжения на обмотке ОВГ ток возбуждения и э. д. с. генератора уменьшаются до нуля и двигатель останавливается.
Электродвижущая сила генератора уменьшается и, когда она окажется меньше э. д. с. двигателя, возникнет режим генераторного торможения с отдачей энергии в сеть. Двигатель начнет останавливаться. При снижении напряжения генератора до определенного значения отпадает якорь реле 2РП. Его замыкающие контакты отключают обмотку контактора 2Л, что приводит к тому, что замыкающие контакты 2Л отключат ОВГ от сети постоянного тока, а размыкающие Замыкаются и подсоединяют эту обмотку к якорю генератора. Вследствие изменения полярности напряжения на обмотке ОВГ ток возбуждения и э. д. с. генератора уменьшаются до нуля и двигатель останавливается.
Ограничение тока якоря в допустимых пределах при торможении осуществляет реле РУП. При опасных значениях тока это реле срабатывает и своими замыкающими контактами в цепи обмотки возбуждения генератора замыкает накоротко часть сопротивления РВГ.
Разрядное сопротивление Rp предохраняет обмотку возбуждения от перенапряжений в момент ее отключения. Реле максимального тока РМ отключает двигатель при возникновении в цепи яморя токов короткого замыкания.
Реле максимального тока РМ отключает двигатель при возникновении в цепи яморя токов короткого замыкания.
Цепь управления скоростью двигателя постоянного тока