
Делаем усилитель низкой частоты класса “D”. Часть1 | Электроника – это не просто!…
В сетях много информации на тему усилителей класса D. В основном, по готовым конструкциям или по схемам, взятым из сторонних источников, часто без каких-либо комментариев и с ошибками.
Однако, достаточно и весьма приличной информации по этим усилителям, например, здесь: “Усилитель класса D”
Мы разберемся с несколькими усилителями класса “D”, используя инструментарий MULTISIM, позволяющий детально разобраться с их особенностями. Затем, познакомимся с характеристиками усилителей “в железе”.
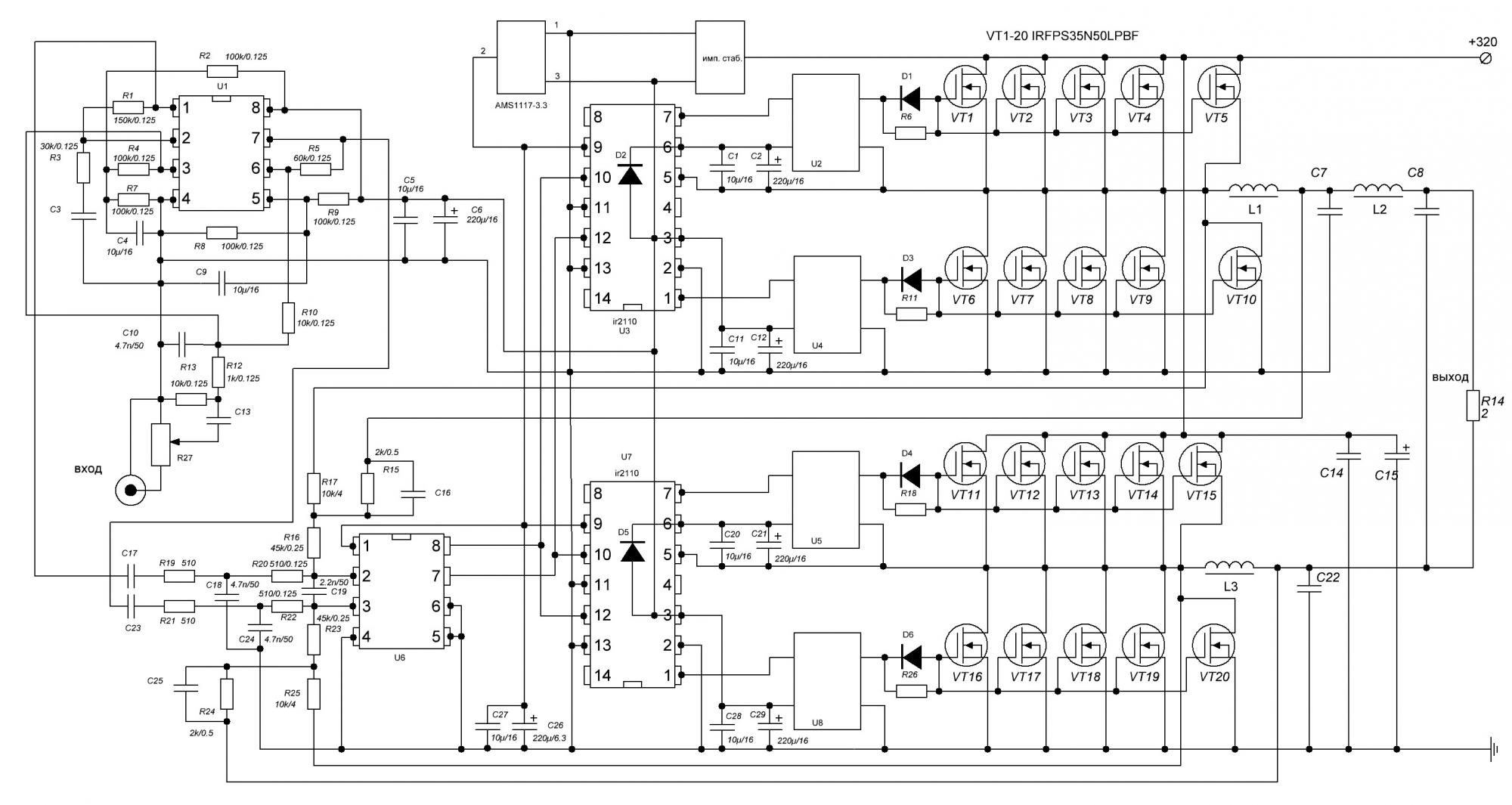
“УМД-500” Усилитель довольно простой. Он легко анализируется, собирается и имеет приличные характеристики. Состоит из 1…3 отдельных каналов, рис.1:
Рис.1.Схема отдельного канала усилителя “УМД-500”Рис.1.Схема отдельного канала усилителя “УМД-500”
Схема выполнена по полумостовой схеме и реализована на основе классического ШИМ-контроллера TL494, драйвера IR2104, а также двух MOSFET транзисторов IRFZ44N.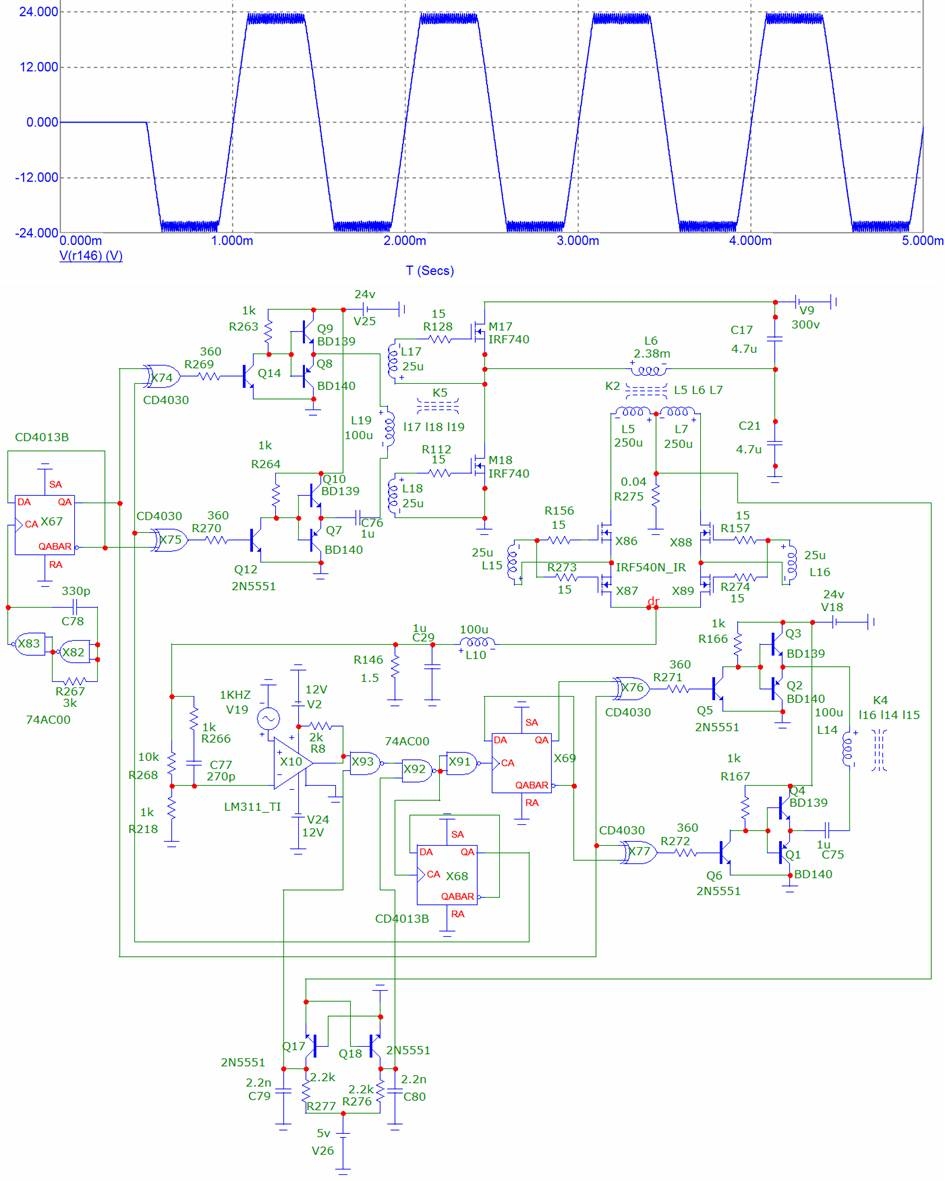
Рис.2.Отдельный канал усилителя “УМД-500”, модель для MULTISIM
Модельная схема подготовлена для анализа с применением MULTISIM-14. Можете скачать её на сайте www.radio-a.ru, в описании “УМД-500” усилители мощностью до 500 Вт, файл “UMD500_1.zip”.
Модельная схема несколько упрощена и в неё добавлены некоторые вспомогательные элементы, для нормальной работы симулятора. Необходимые элементы (например, выходной LC-фильтр) добавим, когда будем рассматривать соответствующие цепи. В практической схеме все необходимые элементы имеются.
Комплектующие для усилителя выбраны известные, доступные, имеющие модели в MULTISIM. Можете заменить их на свои варианты.
Хорошее описание ШИМ-контроллера TL494 и особенностей его применения найдёте на странице сайта www.radio-a.ru в колонке “КОМПЛЕКТУЮЩИЕ” (левая колонка страницы, строчка внизу).
Параметры драйвера IR2104, транзисторов IRFZ44N и прочих элементов найдёте на просторах интернета.
Усилитель может отдать в нагрузку мощность до 500 Вт. Полоса частот от 20 до 12000 Гц. Сопротивление нагрузки от 1 Ома и более.
Проверку работы усилителя начнём с ШИМ-контроллера, а затем сделаем для силовой части.
Проверяем работу ШИМ-контроллера
Выбираем из модельной схемы “UMD500_1.zip” часть с ШИМ-контроллером:
Рис.3.Часть схемы с ШИМ-контроллеромРис.3.Часть схемы с ШИМ-контроллером
Для проверки делаем следующее:
- резистор R6 заменяем на два отдельных, R61 и R62, подключенных к раздельным выходам ШИМ-контроллера c целью проверки генерации парафазных сигналов;
- с этой же целью вводим переключатель S1 и подключаем к нему вход “OTC” ШИМ-контроллера;
- “подключаем” “измерительные приборы”: вольтметр XMM1, генератор XFG1, частотомер XFC1 и др.
Получившуюся модельную схему для проверки ШИМ-контроллера можете скачать там же: файл “UMD500_2.zip”.
Сигнальные цепи для “приёма” усиливаемого сигнала, построены с использованием усилителя ошибки ШИМ-контроллера, генератора пилообразного напряжения и выходных повторителей:
Рис.4.ОСновные цепи ШИМ-контроллераРис.4.ОСновные цепи ШИМ-контроллера
На усилитель DA3, его “положительный” вход, подаётся усиливаемый сигнал и напряжение для смещения рабочей точки по постоянному току. “Отрицательный” вход DA3 замкнут в цепь его обратной связи. Для смещения используется опорное напряжение на выводе “U опорное” (к.14) контроллера, а уровень смещения задаётся делителем R2, R3. Второй усилитель DA4 не используется и заблокирован.
Генератор пилообразного напряжения реализуется с помощью DA6 и внешних времязадающих RC элементов, присоединённых к входам 5 и 6 ШИМ-контроллера.
К выходам 9 и 10 ШИМ-контроллера присоединены нагрузочные резисторы R61 и R62, на которые подаются ШИМ-импульсы.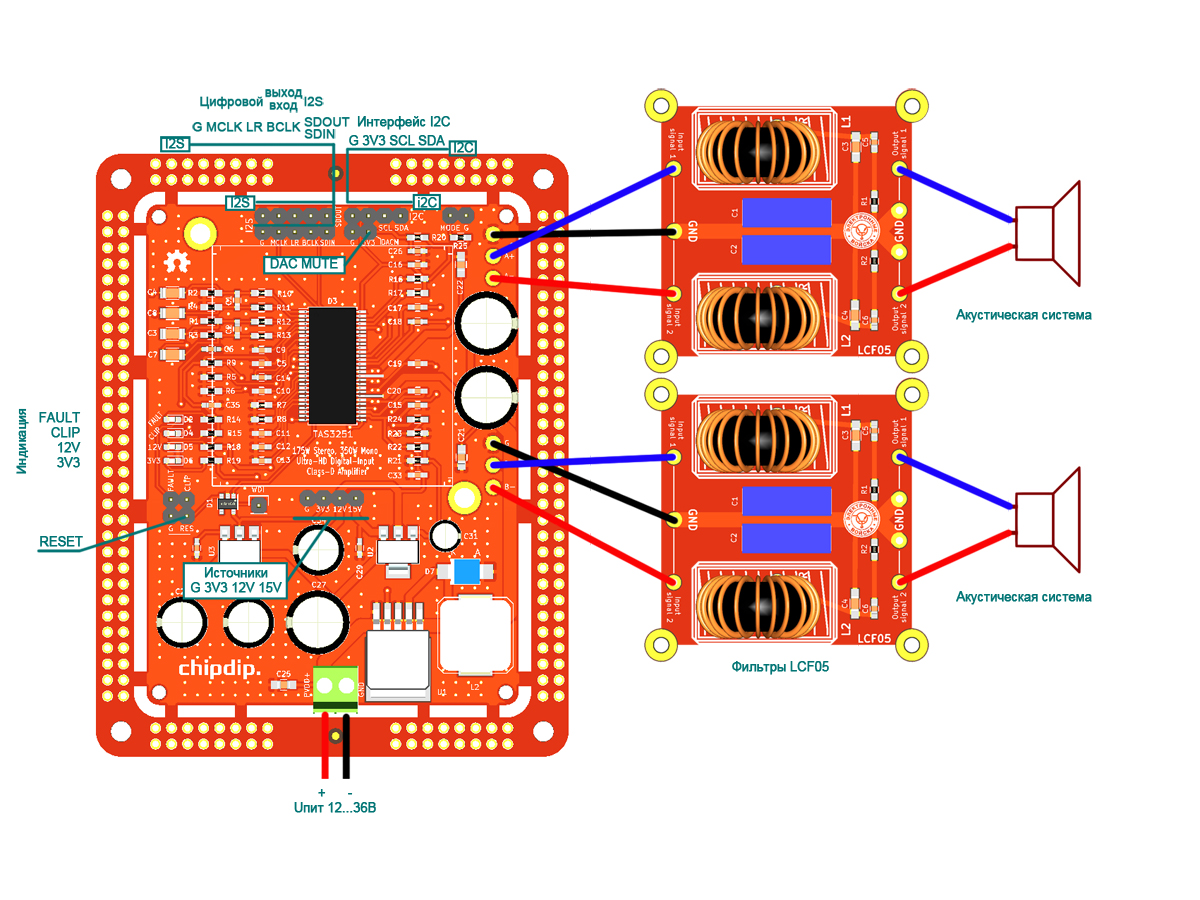 В зависимости от положения переключателя S1 (рис.3), по очереди или одновременно.
В зависимости от положения переключателя S1 (рис.3), по очереди или одновременно.
Так как в усилителе “УМД-500” применяется силовая часть, построенная по “полумостовой” схеме, то от ШИМ-контроллера требуется только один выходной сигнал и контроллер переведён в соответствующий режим, а выходные цепи объединены с целью повышения нагрузочной способности (R61 и R62 объединены в резистор R6, рис.1).
Используя модельную схему UMD500_2, можно определить параметры усилителя:
- динамический диапазон ШИМ-контроллера;
- чувствительность ШИМ-контроллера;
- полосу рабочих частот ШИМ-контроллера;
- величину нелинейных искажений ШИМ-контроллера;
- максимальную частоту ГПН ШИМ-контроллера
и некоторые другие параметры. Параметры ШИМ-контроллера являются определяющими для усилителя.
Определяем динамический диапазон ШИМ-контроллера
Схема для измерения динамического диапазона:
Рис. 5.Схема для измерения динамического диапазона
5.Схема для измерения динамического диапазонаРис.5.Схема для измерения динамического диапазона
Из модельной схемы UMD500_2 убраны все лишние элементы, в сигнальную цепь ШИМ-контроллера добавлены управляемый источник напряжения V1, соединенный последовательно с генератором сигналов XFG1.
Измерения производим для:
– статического режима, при “выключенном” генераторе XFG1 (“Amplitude=0”) и регулируемом V1;
– сигнального режима, при включенных XFG1 и V1, с выбранными значениями сигнала на частоте 1000 Гц и напряжения смещения.
Частота ГПН ~ 250 кГц. Параметры сигналов ШИМ-контроллера измеряются осциллографом XSC1 и измерителем длительности импульсов XFC2.
t имп – длительность импульса на выходе ШИМ-контроллера,
t паузы – длительность паузы между импульсами.
Результаты измерений приведены в Табл.1 и на графике, рис.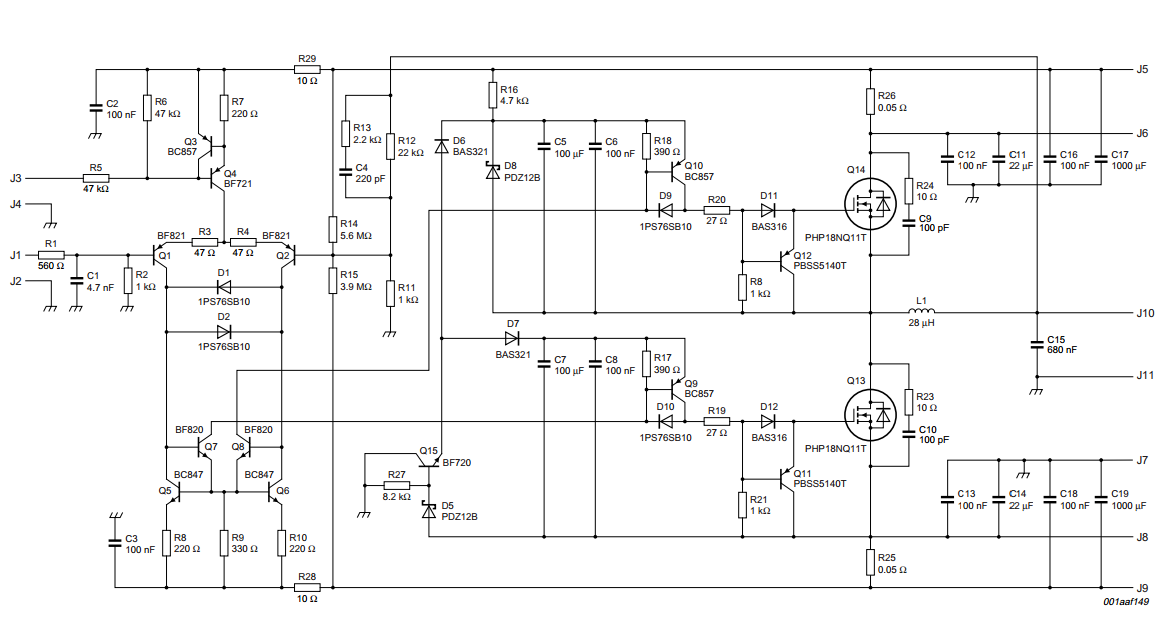 6:
6:
Табл.1. Результаты измерений динамического диапазона
График:
Рис.6.График измерений динамического диапазонаРис.6.График измерений динамического диапазона
Из результатов измерений видно, что зона достаточной линейности динамического диапазона находится в интервале входных напряжений от 0.8 до 3.6 В. Среднее значение 2.2 В. Максимальное амплитудное значение входного напряжения 3.6 – 2.2 = 1.4 В.
Динамический диапазон входной цепи контроллера можно определить ещё одним способом. Усиливаемый сигнал подается на усилитель DA3. Выходная цепь этого усилителя выведена на контакт 3 “Обратная связь”, рис.7. “Подключаем” к нему осциллограф и видим, что в режиме усиления, сигнал должен быть в диапазоне от нуля до напряжения, при котором открывается DA2, примерно 2.5В. Смещение по положительному входу DA3 обеспечивает симметрирование усиливаемого сигнала относительно динамического диапазона выходной цепи DA3.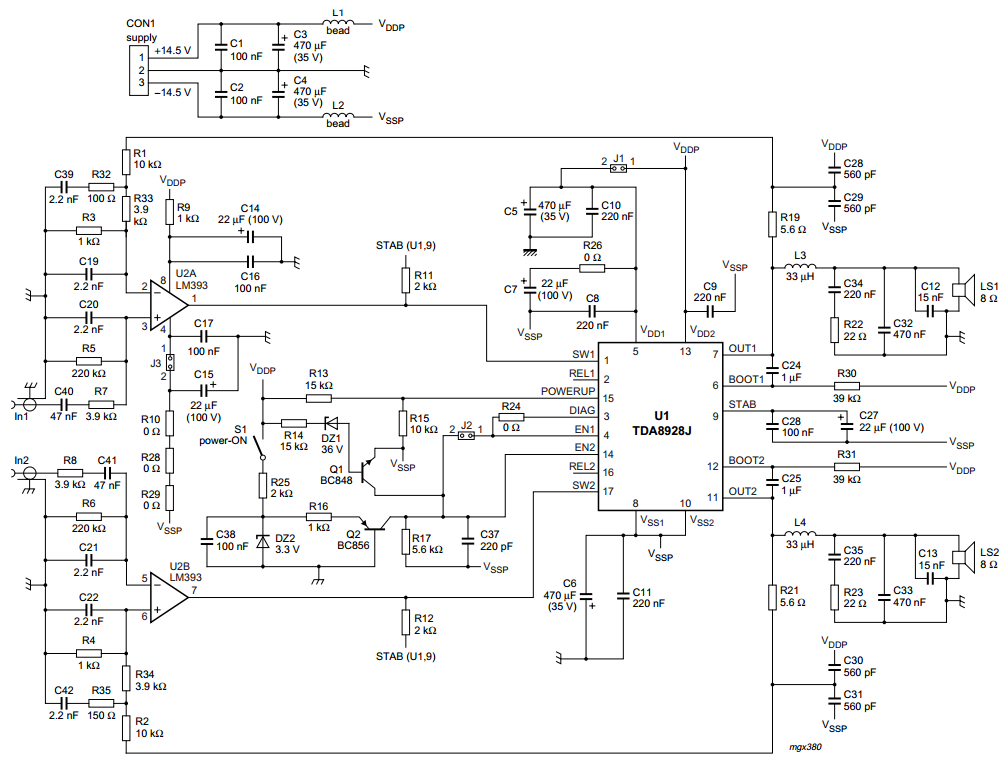
Рис.7. Измерение динамического диапазона вторым способом
Проверяем качество преобразования ШИМ-контроллера
К выходной цепи ШИМ-контроллера подключаем интегрирующее RC-звено (R100, C100) для преобразования импульсного ШИМ-сигнала в линейный, рис.8.
Выставляем на источнике V1 смещение, равное 2.2 В (среднее значение входного напряжения). Подаем с генератора XFG1 сигнал частотой 1000 Гц, амплитудой 1.4 В.
Рис.8.Схема для оценки качества преобразованияРис.8.Схема для оценки качества преобразования
Сравниваем сигналы на входе и выходе ШИМ-контроллера:
Рис.9.Сигналы на входе и в выходной цепи ШИМ-контроллера.Рис.9.Сигналы на входе и в выходной цепи ШИМ-контроллера.
Сигналы сопоставимы, следовательно, качество преобразования достаточное. Количественную оценку нелинейных искажений сейчас выполнять не будем.
При выходе за динамический диапазон, наблюдаются обычные ограничения формы сигнала “сверху” и “снизу”.
Чувствительность ШИМ-контроллера определим, как напряжение усиливаемого сигнала, соответствующее максимальному уровню неискажённого сигнала на выходе, на частоте 1000 Гц. Из двух предыдущих проверок, чувствительность составляет 1.4 В.
Чувствительность входной цепи ШИМ-контроллера можно увеличить или уменьшить, меняя коэффициент усиления усилителя DA3. Для этого в цепь обратной связи DA3 включаем элементы R5, R6 и C4, рис.10, как для обычного операционного усилителя. Смещение по положительному входу DA3 необходимо подкорректировать.
Рис.10.Цепь ОС входного усилителяРис.10.Цепь ОС входного усилителя
Например, можно получить чувствительность в 50 мВ, которой достаточно для работы с обычным микрофоном.
Проверяем АЧХ ШИМ-контроллера
Для измерений используем предыдущую схему. Изменяем частоту входного сигнала, измеряем амплитуду сигнала в выходной цепи (на RC-интеграторе).
Изменяем частоту входного сигнала, измеряем амплитуду сигнала в выходной цепи (на RC-интеграторе).
Собственная частота среза RC-интегратора (100 кГц) находится значительно выше частотного диапазона усилителя и измерениям не мешает.
Результаты измерений приведены в Табл.2 и на графике, рис.11:
Табл.2. Результаты измерений АЧХТабл.2. Результаты измерений АЧХ
Рис.11. График АЧХРис.11. График АЧХ
По результатам “измерений” видим, что полоса частот ШИМ-контроллера от 0 до 11 кГц.
Нижняя граница полосы fн равна нулю, так как в цепях нет разделительных конденсаторов.
Верхняя граница полосы fв определяется собственными скоростными характеристиками ШИМ-контроллера . Они и будут определять полосу частот усилителя в целом.
Далее разберёмся с выходными цепями ШИМ-контроллера TL494.
Параметры:
-Напряжение питания до 42 В.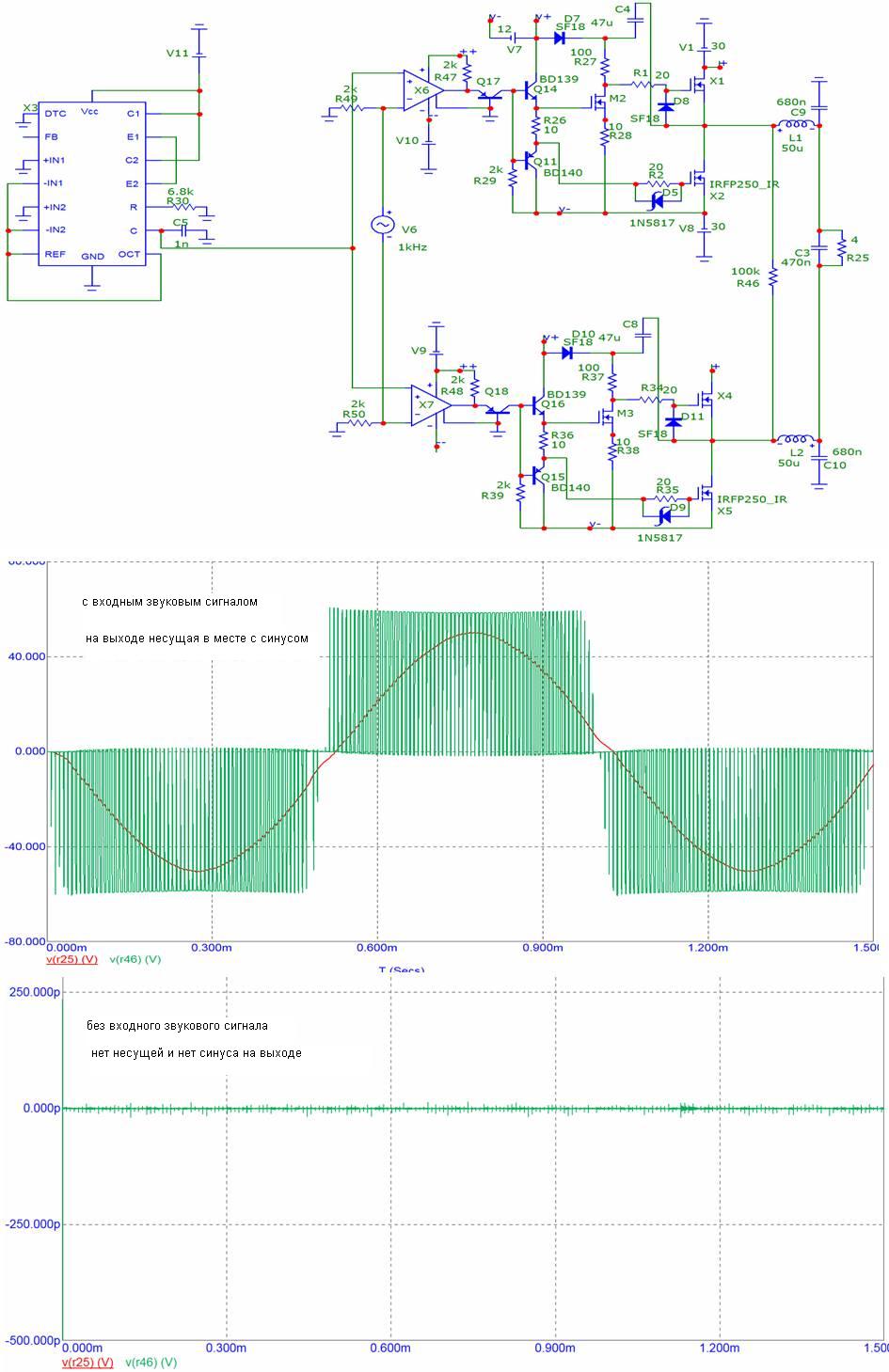
-Напряжение на коллекторе выходного транзистора до 42 В.
-Ток коллектора выходного транзистора до 500 мА.
-Рассеиваемая мощность (при t< 45 °C) до 1000 мВт.
С такими параметрами можно сделать простейший усилитель класса “D”, работающий на нагрузку в 8 Ом. Например, по схеме Рис.12
Рис.12.Простейший усилитель класса D на TL494Рис.12.Простейший усилитель класса D на TL494
Мощность такого усилителя около 5 Вт, что весьма неплохо. При применении ключевых усилителей в выходных цепях, легко увеличить мощность усилителя в разы. Можете поэкспериментировать с этим усилителем.
Максимальная частота ГПН ШИМ-контроллера TL494 составляет ~ 500 кГц. Она практически не применяется. Типовая частота обычно берется в диапазоне от 100 до 250 кГц.
Применение ШИМ-контроллера
Применяется, как правило, в составе мощных импульсных усилителей или преобразователей электрической энергии, однако, возможно применение в виде самостоятельного маломощного усилителя и преобразователя.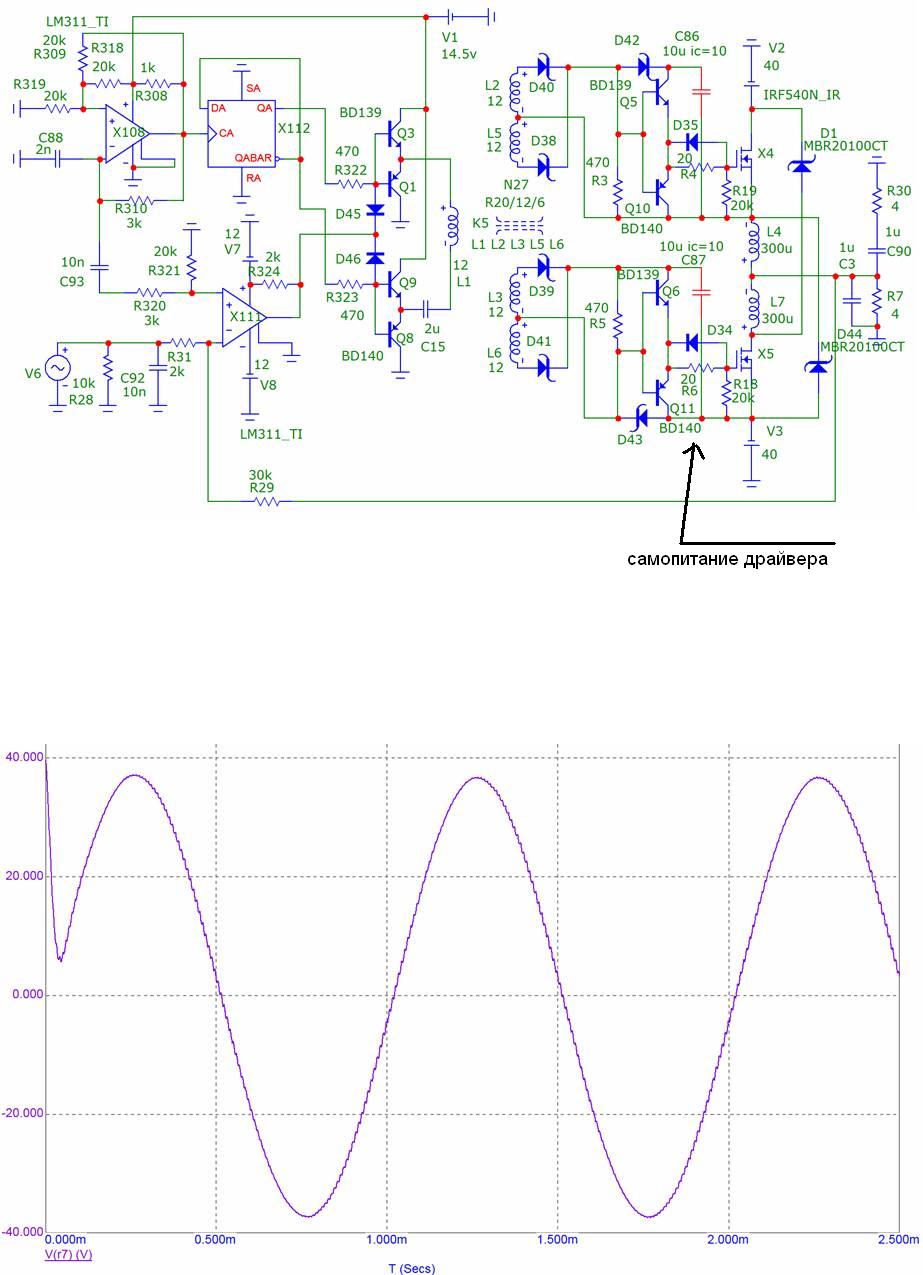
Силовую часть усилителя исследуем во второй и последующих частях публикации.
Желающие поэкспериментировать, могут скачать модельную схему и получить ответы на свои вопросы.
Всем привет!
Есть вопросы – задавайте.
Приглашаю посетить наш сайт: “Практическая электроника”.
RDC2-0038a, Усилитель мощности класса D. TDA8920J, 100Вт Stereo, Электронные войска
Описание
Модуль RDC2-0038a представляет собой высокопроизводительный усилитель мощности класса D. Усилитель построен на микросхеме TDA8920BJ. Это стереофонический аналоговый чип с цифровым усилителем, предназначенный для работы с 4-омными громкоговорителями мощностью до 110 Вт на канал.
RDC2-0038a сконфигурирован для работы с двумя каналами включенными по мостовой схеме (BTL).
На аналоговый вход усилителя можно подавать как несимметричный так и симметричный (дифференциальный) сигнал.
Встроенная система защиты отслеживает: перегрев, перегрузку и короткое замыкание выходов. При наличии одной из вышеперечисленных ошибок усилитель отключается, а после устранения ошибки восстанавливает работу.
Для обеспечения высококачественного высокоэффективного усиления звука требуется простой пассивный фильтр демодуляции цифрового сигнала LCF05 (приобретается отдельно).
В качестве предварительных усилителей рекомендуем (приобретаются отдельно):
– RDC1-0034a, дифференциальный, высокопроизводительный предварительный усилитель на OPA1632
– RDC1-0048, усилитель с низким уровнем шума на NE5532
– RDC2-0058, предварительный усилитель – темброблок на ADAU1761
Технические характеристики
Напряжение питания выходного каскада: ±12.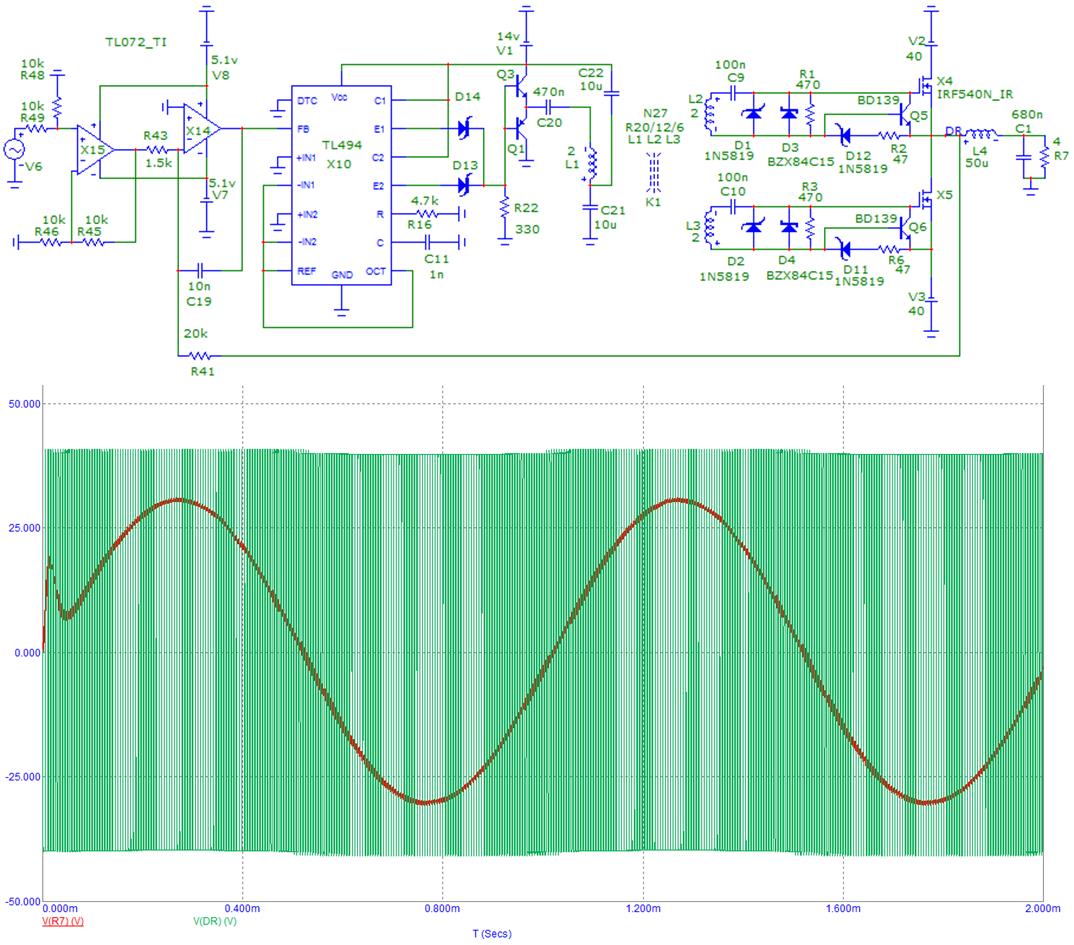 5 … ±30 В
5 … ±30 В
Количество каналов: 2 x BTL
Сопротивление нагрузки: 3-8 Ом
Выходная мощность: BTL 110 Вт / 3 Ом 10% THD
Выходная мощность BTL 86 Вт / 4 Ом / 10% THD
Выходная мощность: BTL 69 Вт / 4 Ом / 0,5% THD
Коэффициент нелинейных искажений:0.02%
Схема усилителя с выходными фильтрами.
Блок-схема усилителя с выходными фильтрами.
Подробную инструкцию по включению и конфигурации усилителя можно найти в разделе «Документы».
Это открытый проект! Лицензия, под которой он распространяется – Creative Commons – Attribution – Share Alike license.
Технические параметры
| Тип устройства | усилитель нч |
| Тип УНЧ | tda8920j |
| Количество каналов | 2 |
| Выходная мощность канала, Вт | 100 |
| Вес, г | 43.38 |
Техническая документация
Мощный УНЧ D класса
В последнее время у радиолюбителей растет интерес к усилителям повышенной мощности.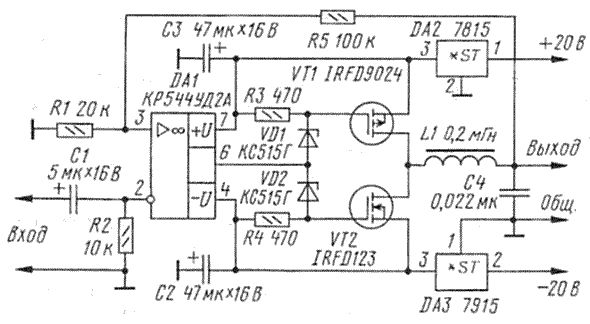 Как правило традиционные усилители класса АВ не позволяют соорудить УНЧ с мощностью выше 500-600 ватт, ведь когда мощность усилителя нужна выше указанной, то резко увеличивается количество комплектующих компонентов и выходных пар транзисторов – это делает схему очень сложной, дорогой и в добавок – трудная настройка схемы. Тут на помощь идут усилители класса D.
Как правило традиционные усилители класса АВ не позволяют соорудить УНЧ с мощностью выше 500-600 ватт, ведь когда мощность усилителя нужна выше указанной, то резко увеличивается количество комплектующих компонентов и выходных пар транзисторов – это делает схему очень сложной, дорогой и в добавок – трудная настройка схемы. Тут на помощь идут усилители класса D.
Данный усилитель класса D построен на специализированном драйвере серии IRS20955S. На основе данного драйвера можно создать УНЧ с высоким КПД и весьма хорошим звуком и очень малыми гармоническими искажениями. Итак, давайте рассмотрим основные параметры усилителя.
Выходная мощность 130 ВТ при THD 1%Частотный диапазон: 18Гц -35кГц
THD 0,04% на 1кГц
КПД до 95%
Из этого можно сделать вывод, что данный усилитель не обладает столь высокой мощностью, которые мы рассматривали в наших предыдущих статьях, но давайте не забудем, что это класс D, тут минимальные тепловые потери, если сравнить с классом АВ, где на тепло уходит ровно половина начального питания, ведь КПД у этого класса не более 55%.
В схеме тоже все достаточно просто, оконечник построен на паре мощных полевых транзисторов прямой проводимости, стабилитроны можно ставить любые на 15 вольт, особо углубляться в работу схемы не буду. Питается усилитель от двухполярного источника, напряжение на плечо 40 вольт. АD825 -высококачественный операционный усилитель, от него сигнал поступает на компаратор LM311, затем уже на драйвер, выходной сигнал драйвера усиливается каскадом полевых транзисторов. В дальнейшем мы продолжим рассматривать конструкции мощных усилителей данного класса.
Понравилась схема – лайкни!
ПРИНЦИПИАЛЬНЫЕ СХЕМЫ УНЧ
УСИЛИТЕЛИ НА ЛАМПАХ УСИЛИТЕЛИ НА ТРАНЗИСТОРАХ
УСИЛИТЕЛИ НА МИКРОСХЕМАХ СТАТЬИ ОБ УСИЛИТЕЛЯХ
Усилитель класса D 100 Вт « схемопедия
Интерес к усилителям мощности (УМ) класса D появился после разработки первых Импульсных Источников Питания.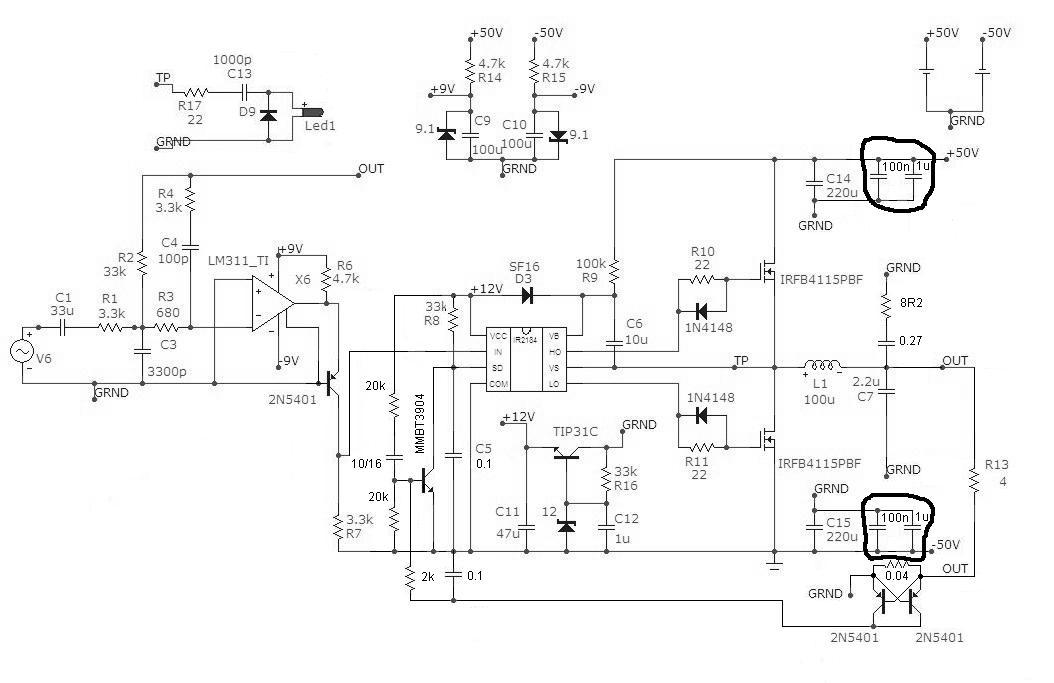 Стояла задача собрать простой и экономичный УМ. Тема эта не имела своего развития, пока на глаза не попался патент, на то время ведущего инженера-разработчика фирмы Филипс, Бруно Путзейса [1]. Одновременно прочитал статью Сергея Кузнецова [2] на ту же тему. Много информации и ценных советов получены на vegalab.ru, в теме «класс Д для саба» [3]. Естественно, выбранная конструкция не претендует на законченность или выдающиеся параметры, так-так является на 100% любительской. Но с уверенностью можно утверждать, что конструкция является проверенной и повторяемой, не требует изготовления многослойной ПП. Во время проектирование главным критерием была как раз повторяемость, малая номенклатура использованных запчастей, их доступность, и возможность сборки в любых домашних условиях. В отличие от многих подобных схем использованы smd резисторы и конденсаторы одного типоразмера – 1206 и 0805 соответственно, а все комплектующие доступны для заказа через интернет.
Стояла задача собрать простой и экономичный УМ. Тема эта не имела своего развития, пока на глаза не попался патент, на то время ведущего инженера-разработчика фирмы Филипс, Бруно Путзейса [1]. Одновременно прочитал статью Сергея Кузнецова [2] на ту же тему. Много информации и ценных советов получены на vegalab.ru, в теме «класс Д для саба» [3]. Естественно, выбранная конструкция не претендует на законченность или выдающиеся параметры, так-так является на 100% любительской. Но с уверенностью можно утверждать, что конструкция является проверенной и повторяемой, не требует изготовления многослойной ПП. Во время проектирование главным критерием была как раз повторяемость, малая номенклатура использованных запчастей, их доступность, и возможность сборки в любых домашних условиях. В отличие от многих подобных схем использованы smd резисторы и конденсаторы одного типоразмера – 1206 и 0805 соответственно, а все комплектующие доступны для заказа через интернет.
Кроме того, после сборки предыдущих версий УМ была осознана острая необходимость включения в схему узла защиты от КЗ, так как кратковременное замыкание, или другое нештатное событие выводит из строя выходные ключи и, часто, микросхему драйвер, которые как раз и составляют львиную долю стоимости УМ.
Схему на дискретных элементах была отброшена из-за необходимости настройки каждого экземпляра устройства и склонности к нежелательным самовозбуждениям. Аналогичная схема на ИМС настройки не требуют и не столь критична к замене типов транзисторов и смене напряжения питания.
Рис.1. Блок-схема УМ класса Д
На микросхеме IC1 собран входной балансный усилитель напряжения. Такая схема выбрана в связи с необходимостью взаимокомпенсации влияния наводок. Коэффициент усиления плеч задается соотношением резисторов R2R5 R7R5, и при использование указанных номиналов составляет примерно 16дБ (6 раз). На элементах С2R2R4C4 и C1R1R3C3 сформирована АЧХ сигнала, поступающего на ОУ и развязка по постоянному току. Симметричные сигналы с выходов 1 и 7 IC1, через резисторы R8, R9 поступают на входы компаратора IC2 LM311, куда поступает сигнал обратной связи, через патентованную цепь ОС из [1]. IC2, VT3-VT5, IC3, VT8,VT9 и другие элементы объединяются в усилитель класса «Д», коэффициент усиления которого в звуковом диапазоне частот равен отношению R8, R9 к R15, R16 соответственно, для сохранения баланса R8 должен быть равен R9, а R15 – равен R16.
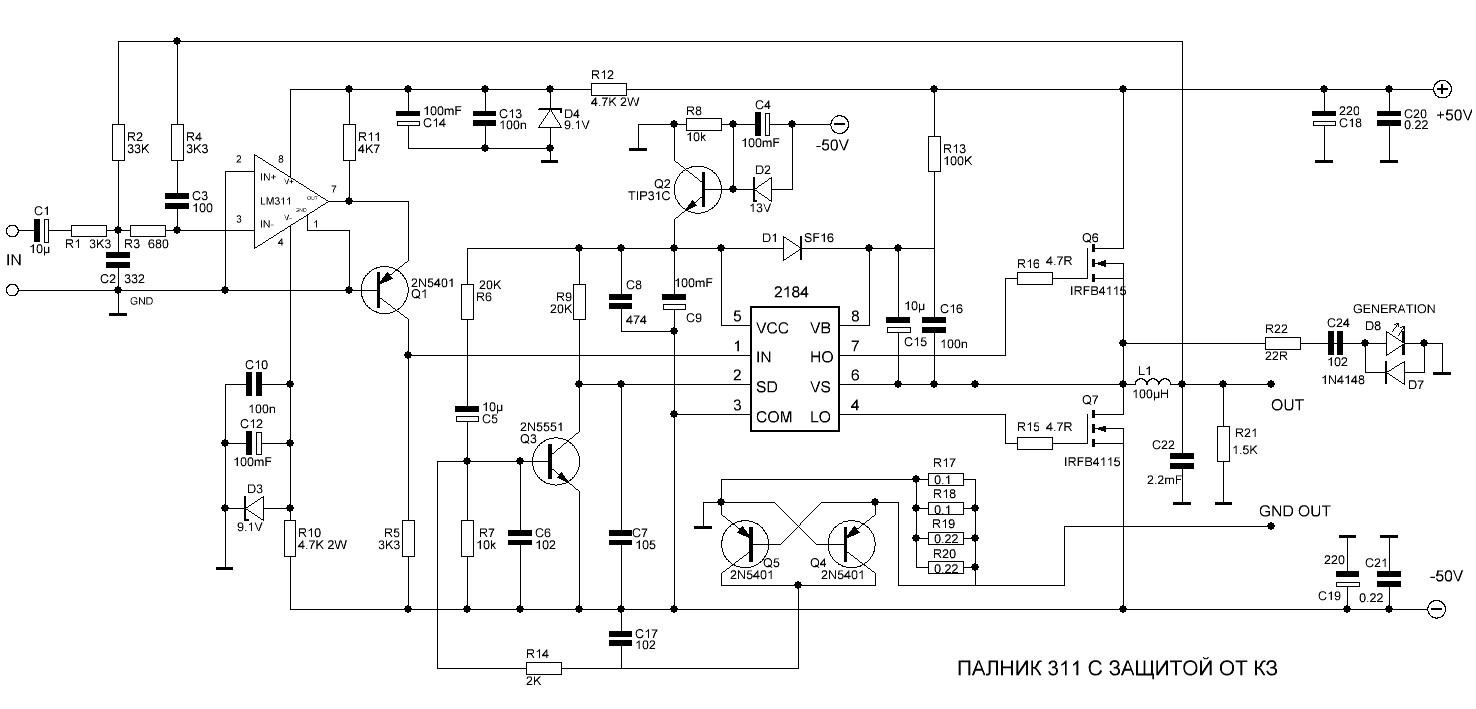
Рис.2. Принципиальная схема УМ класса Д
Так-так драйвер IR2110 IC3 имеет раздельные входы управления верхним и нижним плечом, сигнал с вывода компаратора, который, по сути, является ШИМ модулированным звуковым сигналом, поступает на инвертор VT3, VT5, включенных по схеме дифференциального каскада. На VT4VD3 собран источник тока 1,2мА для обеспечения его работы. Ток задается равенством падения напряжения на составном сопротивлении R22, R23 и стабилитрона VD4. Для облегчения режима работы VT4 в цепи эмиттера включен дополнительный гасящий резистор R20. Кроме инвертирования сигнала VT3, VT4 выполняют еще одну важную функцию – функцию «левелшифтера». Так-так вывод Vss (сигнальная земля) микросхемы драйвера подключен к отрицательному выводу питания, необходимо «привести» сигнал ШИМ IC2 относительно земли устройства к уровню относительно «–Vcc».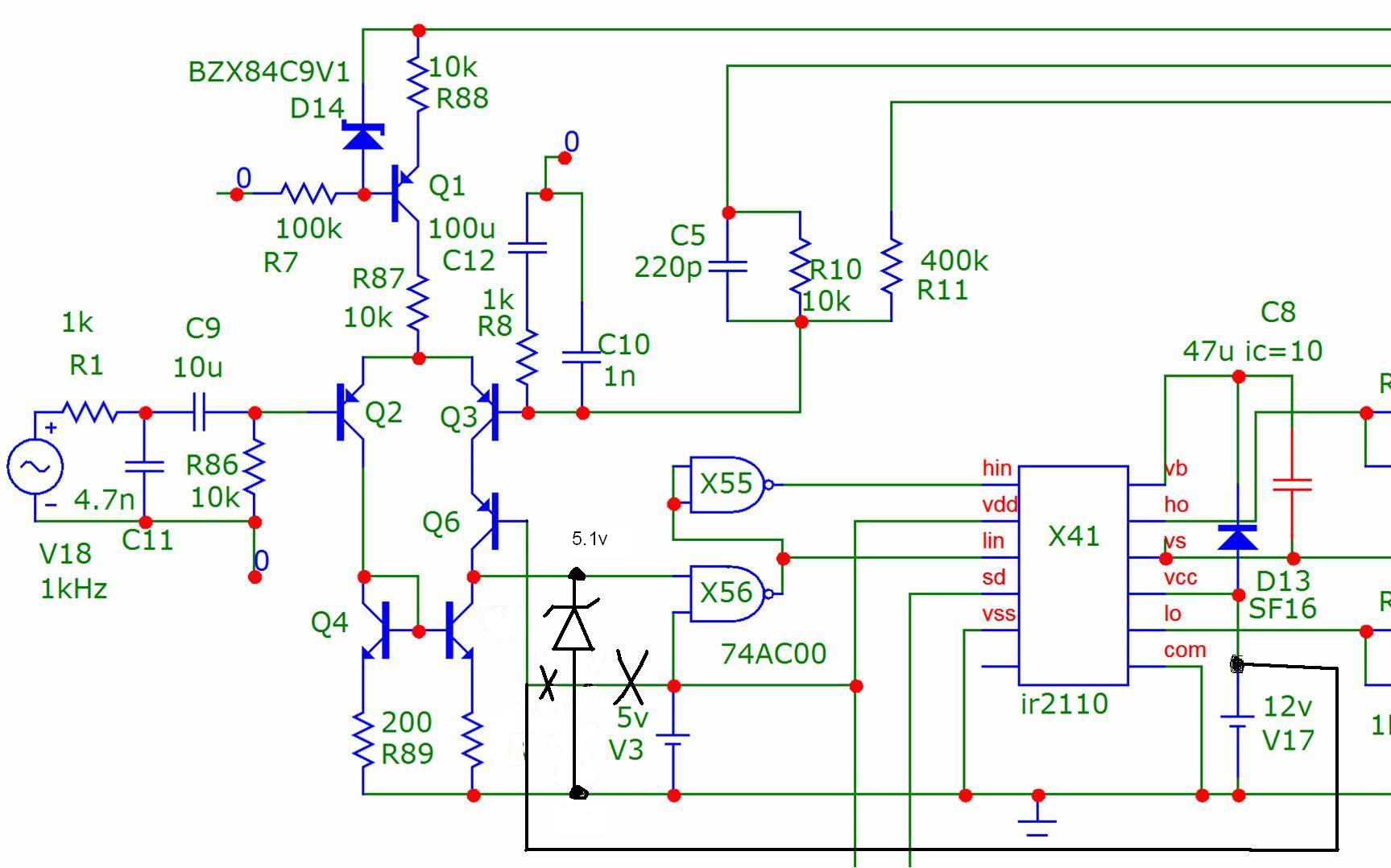
Во избежание сквозного тока через транзисторы VT8, VT9 в зарядной цепи установлены ассиметричные схемы ограничивающие ток заряда емкости затворов VD7R36, VD8R37. Время переключения можно рассчитать, пользуясь [5]. В данном устройстве применены полевые транзисторы (ПТ) IRF 540Z как доступные, не дорогие и приемлемые по параметрам. При применение в устройстве стабилитронов на 12В напряжение управлення на затворах ПТ будет составлять 12В-1,5В=10,5В (так-так транзистор VT7 составной). При R36=R37<10 Ом начинается разогрев выходных транзисторов, потому использованы резисторы 15 Ом. В этом случае время переключения, согласно [5] будет равно 42нК/(10,5В/15Ом)=60нС (при 10 Ом 40нС) Для примера, при напряжении питания IC3 равному 13В, из-за увеличения полного заряда затвора, время переключения в той же схеме будет 54нК/(13В/15Ом)=62,3нС.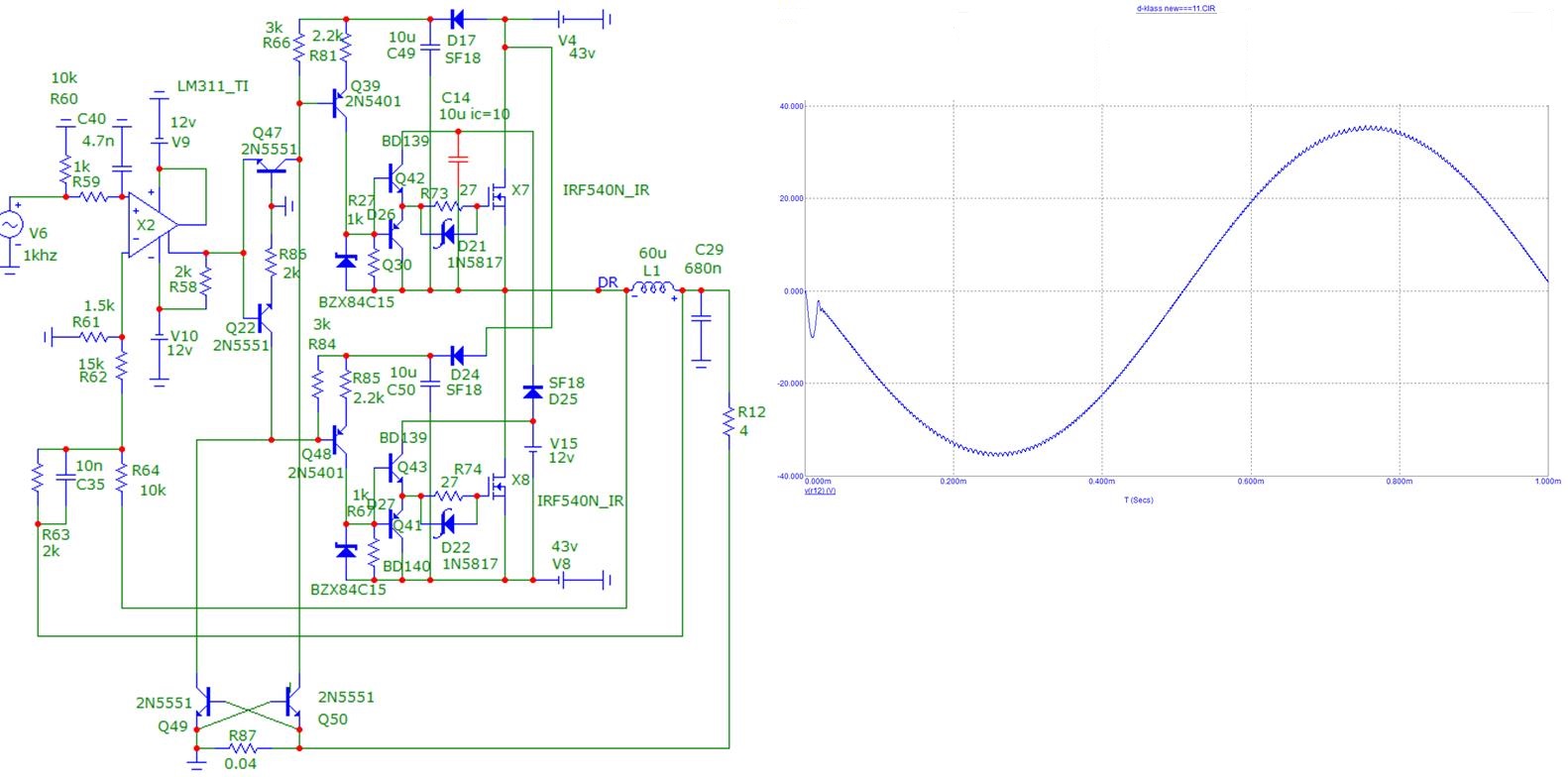
Первоначально схема защиты была устроена на датчике тока, который включался в цепь стока одного из транзисторов. Таким образом, при превышении тока через датчик вырабатывался сигнал на отключение устройства. Но для контроля тока в десятки ампер сопротивление и мощность резистора датчика тока, а также занимаемое им место на ПП становиться неприемлемыми. Лучшим решением есть «считывание» падения напряжения с самого перехода ПТ, в то время, когда он открыт, тем более, что такая схема легко реализуется. Так, в период времени, когда VT9 открыт, точка соединения ПТ-ов через переход сток/исток нижнего транзистора соединяется с отрицательным входом питания. Напряжение в этой точке равняется –Vcc+Ik*Rdson. Так, при токе в 15А через ключ, на истоке будет напряжение, которое больше –Vcc на 15А*0,027 Ом=0,405В. Для развязки от напряжения +Vcc использован быстрый диод VD6. Напряжение «+10,5В» c затвора ПТ подается через ограничивающий резистор R40 на VD6, в таком случае, напряжение в точке соединения R40 и VD6 составит сумму падения напряжения на переходе VD6 плюс напряжения падения на ПТ. То есть, при токе в 15А будет составлять около 0,4В+0,4В=0,8В. Для сглаживания пульсаций этого напряжения использован конденсатор С22, а для его разрядки R36.
 Далее напряжение с датчика тока сравнивается с опорным, которое формируется с помощью делителя напряжения R34R32. Причем опорное напряжение можно подстраиваться помощью подстроечного R32. В том случае, если напряжение с датчика больше, чем опорное – выходной транзистор микросхемы IC5 с открытым коллектором закрывается. На выходе 1,7 IC5 благодаря R35 появляется напряжение +12В, открывается транзистор VT9, который в свою очередь быстро разряжает емкость С26 и запускает таймер NE555 IC4, на его выходе 3 устанавливается логический уровень «1» – напряжение 10,5В относительно –Vcc. Это напряжение через светодиод HL1 поступает на вход 11 «Sd» IC3 и запрещает генерацию. Так как входной ток по этому входу недостаточен, для засвечивания светодиода, а так же для исключения ложного срабатывания защиты, по входу «Sd» подключен шунтирующий резистор R26.
Далее напряжение с датчика тока сравнивается с опорным, которое формируется с помощью делителя напряжения R34R32. Причем опорное напряжение можно подстраиваться помощью подстроечного R32. В том случае, если напряжение с датчика больше, чем опорное – выходной транзистор микросхемы IC5 с открытым коллектором закрывается. На выходе 1,7 IC5 благодаря R35 появляется напряжение +12В, открывается транзистор VT9, который в свою очередь быстро разряжает емкость С26 и запускает таймер NE555 IC4, на его выходе 3 устанавливается логический уровень «1» – напряжение 10,5В относительно –Vcc. Это напряжение через светодиод HL1 поступает на вход 11 «Sd» IC3 и запрещает генерацию. Так как входной ток по этому входу недостаточен, для засвечивания светодиода, а так же для исключения ложного срабатывания защиты, по входу «Sd» подключен шунтирующий резистор R26.
Для контроля тока через ПТ был применен сдвоенный компаратор КА393. Его вторая половина следит за напряжением питания нижнего плеча.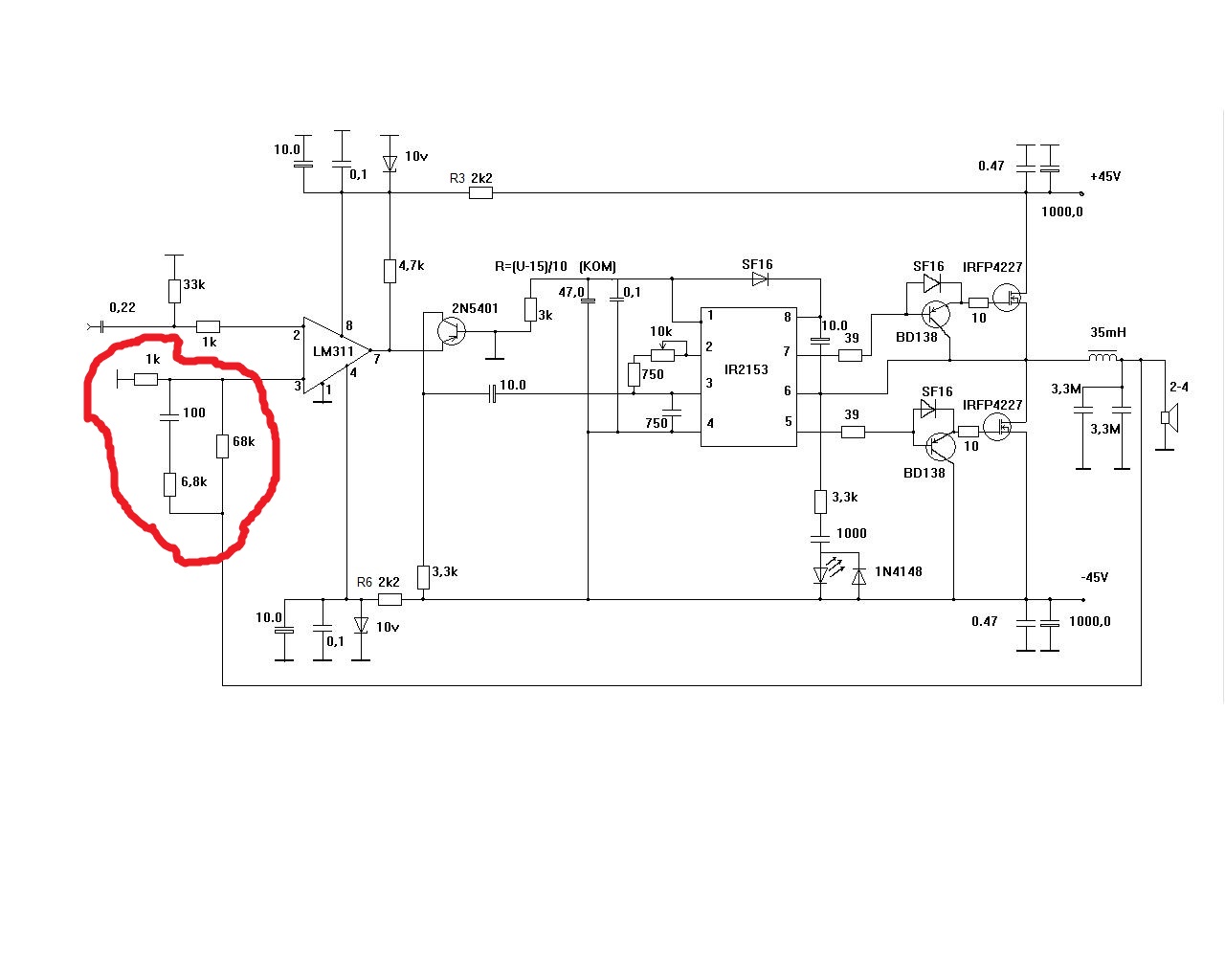 При этом подразумевается, что оба плеча питания симметричны. При напряжении питания отрицательного плеча ниже уровня примерно «-20В» компаратор срабатывает, и аналогично схеме защиты от превышения тока через ПТ, блокирует работу IC3 и выходного каскада. Это сделано для исключения неприятного свиста при выключении УМ. Кроме этого, схема на таймере 555 IC5 задерживает включение УМ при подключении питания на 2с. Соответственно, при кратковременном срабатывании защиты УМ будет выключаться на 2с. Схема включения IC5 стандартная. Кроме этого, у схемы защиты есть еще одно полезное свойство. Так-так сопротивление канала полевого транзистора растет с температурой (а максимальный допустимый ток уменьшается) и, соответственно, при равных токах на разогретом транзисторе падение будет выше, чем на холодном. Таким образом, порог срабатывания защиты смещается в безопасную зону при перегреве.
При этом подразумевается, что оба плеча питания симметричны. При напряжении питания отрицательного плеча ниже уровня примерно «-20В» компаратор срабатывает, и аналогично схеме защиты от превышения тока через ПТ, блокирует работу IC3 и выходного каскада. Это сделано для исключения неприятного свиста при выключении УМ. Кроме этого, схема на таймере 555 IC5 задерживает включение УМ при подключении питания на 2с. Соответственно, при кратковременном срабатывании защиты УМ будет выключаться на 2с. Схема включения IC5 стандартная. Кроме этого, у схемы защиты есть еще одно полезное свойство. Так-так сопротивление канала полевого транзистора растет с температурой (а максимальный допустимый ток уменьшается) и, соответственно, при равных токах на разогретом транзисторе падение будет выше, чем на холодном. Таким образом, порог срабатывания защиты смещается в безопасную зону при перегреве.
В схеме для питания ОУ и компаратора собраны два параметрических стабилизатора на VT1VD1С13R17 и VT2VD2С14R18. Для развязки от ВЧ помех установлены дроссели L1,L2, которые совместно с С15,С17 и С16,С18 составляют LC фильтр. При отсутствии дросселей такого типа допустимо использовать резисторы 100-220 Ом. Для питания драйвера IR2110 IC3 и схемы защиты собран еще один параметрический стабилизатор на VT7VD4R33C20. Применен составной транзистор TIP112. Для него нужен радиатор, который может отводить не менее 3Вт тепла. Основную часть мощности потребляет IC3.
Для развязки от ВЧ помех установлены дроссели L1,L2, которые совместно с С15,С17 и С16,С18 составляют LC фильтр. При отсутствии дросселей такого типа допустимо использовать резисторы 100-220 Ом. Для питания драйвера IR2110 IC3 и схемы защиты собран еще один параметрический стабилизатор на VT7VD4R33C20. Применен составной транзистор TIP112. Для него нужен радиатор, который может отводить не менее 3Вт тепла. Основную часть мощности потребляет IC3.
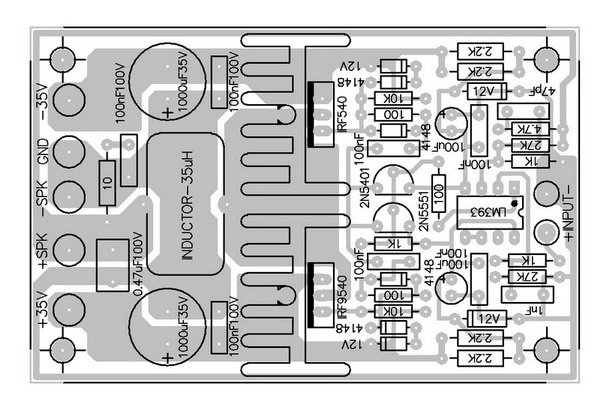
Рис 3. ПП УМ класса Д
Печатная плата представлена на рис.3. Как уже указывалось, ПП не претендует не какой-либо профессионализм, но лишь является работоспособной и легко повторяемой в любительских условиях.
Рис. 4. Монтажная схема УМ верх
Верхний слой фольги оставлен под землю, в местах отверстий под элементы фольга снята небольшим сверлом. Монтажная схема представлена на рис.4.
Рис. 5. Монтажная схема УМ низ
На плате предусмотрена возможность экранирования входного ОУ и компаратора.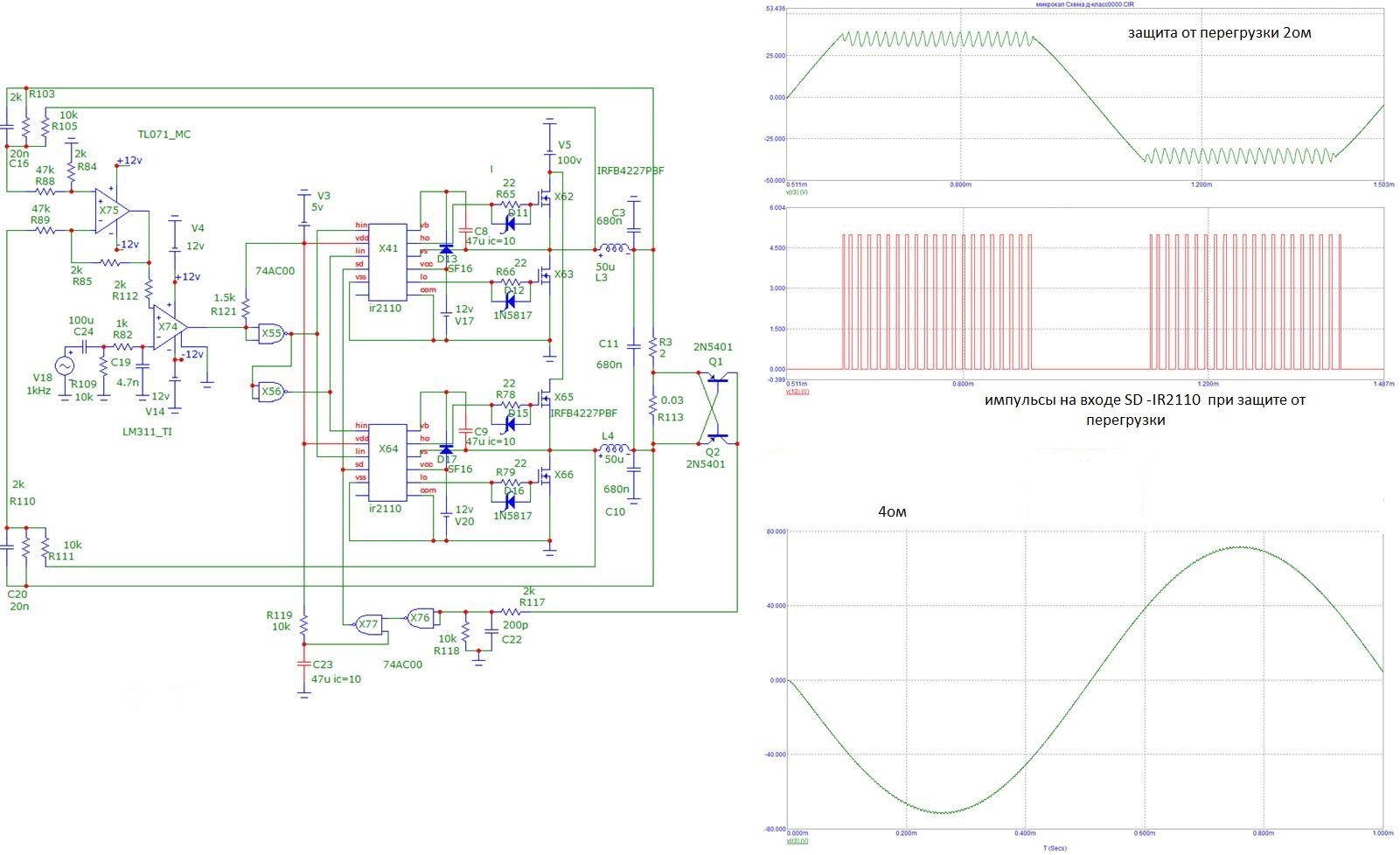 Для этого вокруг них симметрично расположены земляные полигоны и переходные отверстия. Однако, как оказалось, в этом нет необходимости.
Для этого вокруг них симметрично расположены земляные полигоны и переходные отверстия. Однако, как оказалось, в этом нет необходимости.
Во время сборки сначала устанавливаются детали параметрических стабилизаторов и цепь источника тока инвертора. Проверяется наличие выходных напряжений на стабилизаторах и падение напряжения на R20. Оно должно быть около 6В. Затем монтируется микросхема-таймер NE555 c обвязкой, R33 не устанавливается. Производится проверка работы узла задержки запуска при включении. Светодиод должен загораться на 1-3с. после включения питания, а затем тухнуть. Затем монтируется компаратор LM393 с обвязкой, в том числе R33 и VT6. Путем регулировки подстрочного резистора R30 устанавливается напряжение на 3 ноге LM393 равным 0,9-1В, проверяется работа схемы контроля напряжения питания. Удобно это делать с помощью регулируемого БП. При понижении напряжения питания менее 15-20В должен загораться светодиод. После проделывания этих проверок устанавливают остальные детали.
 Однако мне это показалось излишним.
Однако мне это показалось излишним.
Дроссель в усилителе едва ли не самый важный элемент. При его неправильном изготовлении либо будут перегреваться транзисторы, либо сам дроссель, либо появятся неприятные призвуки на НЧ. В моем случае я использовал дроссель из тороидального сердечника EPCOS 25,3×14,8×10 N87 c зазором около 1,1мм. Зазор аккуратно прорезан «болгаркой» отрезным кругом толщиной 1мм. При резке нужно соблюдать крайнюю осторожность!!! Индуктивность сердечника с зазором можно вычислить из [7]. В моем случае для получения 30 мкГн намотано 24 витка. Диаметр провода нужно использовать не менее 0,8-1мм. Шунтирующий конденсатор выходного фильтра С27 должен поддерживать высокие токи и напряжения, некачественные конденсаторы в нем выходят из строя. Нужно использовать конденсатор не менее чем на 100В. Обязательно зашунтировать ВЧ помехи как можно ближе к выводам выходных транзисторов керамическими конденсаторами на 100В. 50В smd конденсаторы по питанию могут выйти из строя и прожечь ПП.
Данное устройство при использовании указанных компонентов может выдать 100Вт среднеквадратической долговременной мощности при напряжении в +/-34В. Температура после 30 мин. работы в таком режиме будет составлять около 65С на радиаторе VT7, 53С на микросхеме IC3 и 50 на радиаторах выходных транзисторов. На музыкальном сигнале средней мощности нагрев выходных транзисторов не наблюдается и основным источником тепла становится VT7. При применение обдува и увеличении напряжения до +/-47В макс. мощность возрастет до 200Вт и выше. Необходимо понимать, что максимальное выходное напряжение будет меньшим, чем напряжения питания, на величину размаха несущей на выходе.
Усилитель легко модернизировать, собственно при разработке платы учитывалась возможная необходимость в будущем использовать входную часть с модулятором в более мощной конструкции. Для этого необходимо применить 150В, или даже 200В транзисторы, увеличить напряжение питания и переделать выходную часть устройства. Для этого в стабилизаторах питания ОУ и компаратора установлены транзисторы способные рассеивать значительную мощность. При питании не более +/-25В вполне можно ограничиться гасящими резисторами, так-так ток потребление по питанию ОУ и компаратора не превышает 20-25мА. Вообще, собранный правильно УМ надежен и неприхотлив, и не реагирует на ошибки в номиналах резисторов по «цифровым» цепям вплоть до порядка.
Для этого в стабилизаторах питания ОУ и компаратора установлены транзисторы способные рассеивать значительную мощность. При питании не более +/-25В вполне можно ограничиться гасящими резисторами, так-так ток потребление по питанию ОУ и компаратора не превышает 20-25мА. Вообще, собранный правильно УМ надежен и неприхотлив, и не реагирует на ошибки в номиналах резисторов по «цифровым» цепям вплоть до порядка.
Оптимальная частота работы УМ – около 300 кГц. Схема поддерживает работоспособность вплоть до 600 кГц и, наверное, выше, при этом происходит ощутимый нагрев драйвера IC3. Частота зависит от параметров выходного фильтра и цепей ОС
Все конденсаторы емкостью 1мкФ – танталовые, типоразмера А. Все конденсаторы емкостью 1нФ, кроме С22, – фильтрующие, и от их емкости работоспособность не зависит. В качестве выходных транзисторов можно применить аналоги, например IRF540, однако при этом КПД УМ ухудшится. При отсутствии указанных транзисторов лучше всего использовать параметрический поиск на сайтах изготовителей полупроводников.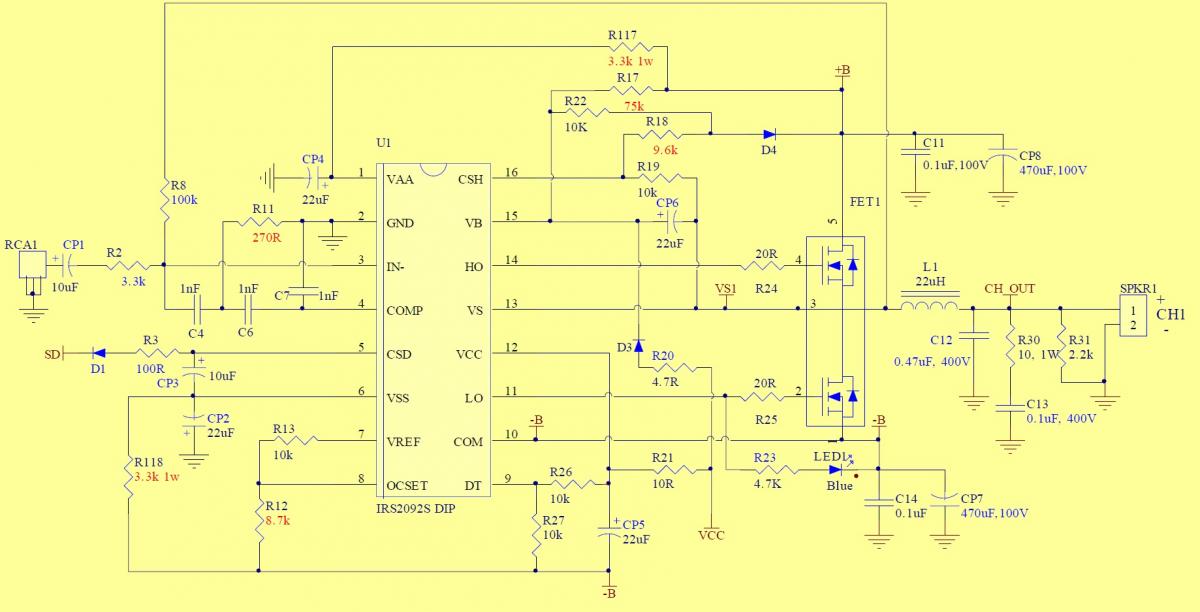 Радиаторы выходных транзисторов обозначаются HS-123-40. Радиатор VT7- алюминиевый, 10х4х30 мм. Его нагрев при напряжении +/-28В около 40С.
Радиаторы выходных транзисторов обозначаются HS-123-40. Радиатор VT7- алюминиевый, 10х4х30 мм. Его нагрев при напряжении +/-28В около 40С.
Плата ревизии 4.82 является 100% проверенной, все ошибки исправлены. УМ включается и выключается без щелчков и шумов и не боится короткого замыкания на выходе. При питании от одного источника питания взаимовлияния каналов мной не замечены. Хотя в [3] рекомендуют включать каждый канал УМ от отдельной обмотки трансформатора питания. При мостовом включении нужно шунтировать выходы разных усилителей конденсатором 0,1мкФ. Работоспособность в мостовом включении проверена. Что касается качественных объективных показателей – судить не берусь, нет необходимого инструментария. Субъективно же – звук качественный и как минимум «интересный». Описание звучания ucd УМ описывают в [3].
Стоимость устройства составила около 13$ без учета пересылки, сборки и разработки/наладки. Подсчет цены в приложенном файле MS Excel.
Скачать печатную плату в формате LAY
Дополнение от 16.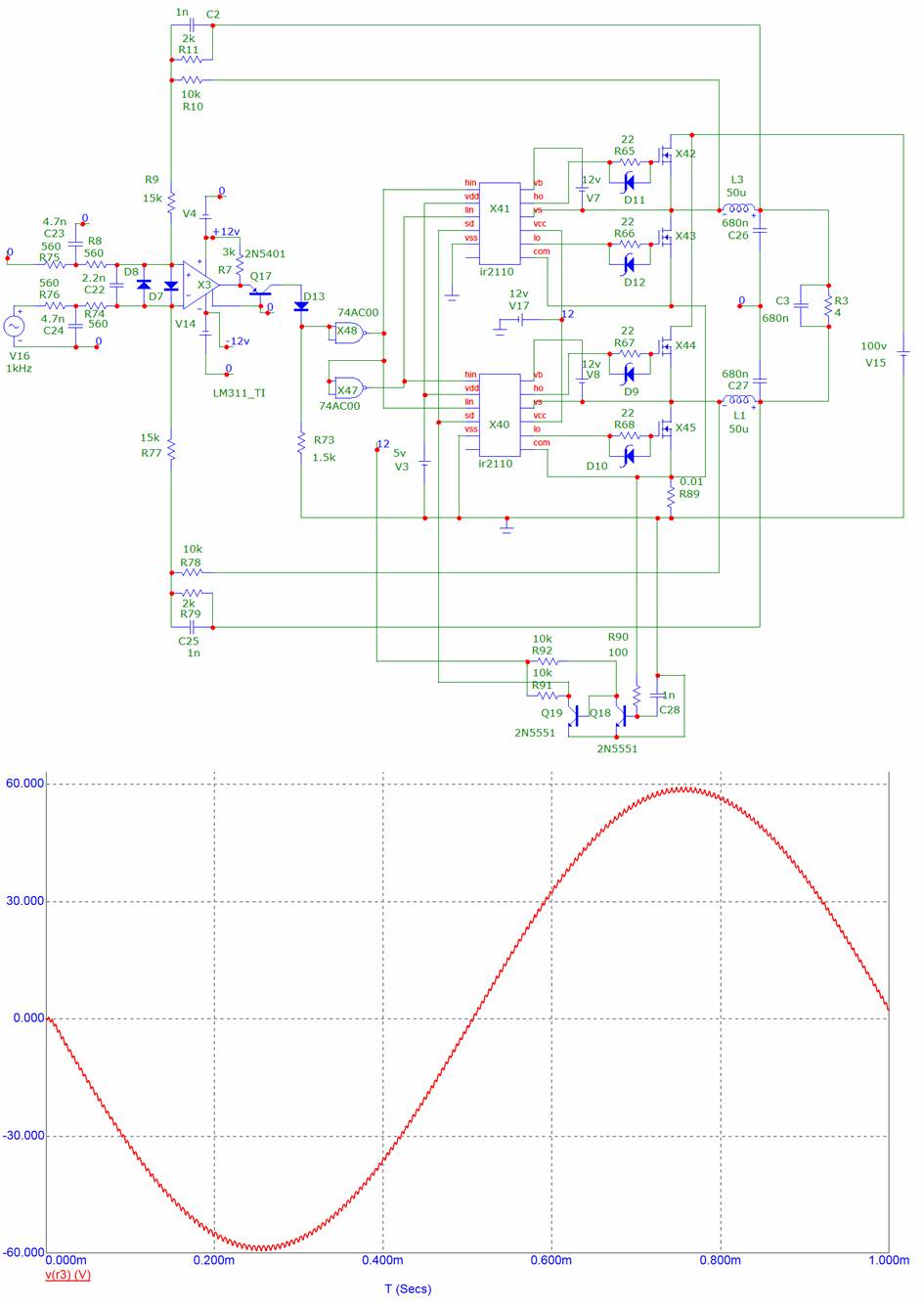 07.2012:
07.2012:
Осциллограммы, приведенные далее, сняты с платы ревизии 4.82. Все указанные детали соответствую схеме, кроме выходных транзисторов. Применены IRF540. БП импульсный, не стабилизированный. Мощность БП 100Вт. Нагрузка 3.9 Ом резистор. Масштаб по вертикали и горизонтали указан под осциллограммой.
Слева осциллограмма напряжения на выходе УМ без входного сигнала (желтым) и напряжение в средней точке ПТ (голубым). Справа напряжение несущей на выходе.
Напряжение на выходе УМ перед ограничением. Мощность 88Вт. Питание +/-28В.
Теоретически возможное напряжение на выходе равно 28В/1,41=19,8В.
Ограничение. Питание +/-26В. Фильтр 20 кГц.
Сигналы на входе драйвера IR2110
Как видно из осциллограммы, переключение, которое является источником помех, происходит, когда переходные процессы в схеме заканчиваются.
Задержка между появлением импульса на входе драйвера IR2110 и сигналом в средней точке ПТ. Голубым – сигнал управления.
Голубым – сигнал управления.
Средняя точка ПТ. Фронт и спад
Выход компаратора LM311
Задержка реакции на смену полярности сигнала на входе диф. каскада (выходе LM311) Желтым – выход LM311, голубым – сигнал на входе драйвера
Общая задержка распространения сигнала. Голубым – выход компаратора, желтым – напряжение в средней точке ПТ
Напряжение датчика тока желтым (фильтр 10Мгц), напряжение средней точки ПТ – голубым
Во время эксплуатации УМ выяснилось, что транзистор VT6 в указанной схеме включения восприимчив к импульсным помехам. Как оказалось, из-за наводок на базу этого транзистора не удается выставить порог защиты выше 100Вт (на 4Ом). Была разработана новая ревизия платы, в которой силовые транзисторы выведены на нижнюю сторону. Изменено также включение схемы защиты, исключен транзистор VT6, радиаторы транзисторов. Уменьшен полигон средней точки ПТ, добавлены цепи подавления «спайков», внесены незначительные изменения в номиналы резисторов. Теперь можно устанавливать плату УМ на пластину-радиатор (дно например). Размер платы уменьшился.
Теперь можно устанавливать плату УМ на пластину-радиатор (дно например). Размер платы уменьшился.
Ссылки:
[1] http://www.google.com.ua/url?sa=t&rct=j&q=%D0%B0%D1%84%D1%82%D0%B0%D1%80%20ucd_aes118_05_2005_putzeys&source=web&cd=2&ved=0CC4QFjAB&url=http%3A%2F%2Fwww.elektroda.pl%2Frtvforum%2Fdownload.php%3Fid%3D303610&ei=-NWGT8W-JMr3sgbGq6XABg&usg=AFQjCNFoc6PsKDQN-Hqxi6xGOF96R_aRqQ&cad=rja
[2] http://www.classd.fromru.com/circuits/ucd1.html
[3] http://www.vegalab.ru/forum/showthread.php/2292-D-class-%D0%B4%D0%BB%D1%8F-%D1%81%D0%B0%D0%B1%D0%B0
[4] http://www.alldatasheet.com/datasheet-pdf/pdf/82793/IRF/IR2110.html
[5] http://www.google.com.ua/url?sa=t&rct=j&q=an%0B944a&source=web&cd=1&ved=0CCoQFjAA&url=http%3A%2F%2Fwww.irf.com%2Ftechnical-info%2Fappnotes%2Fan-944.pdf&ei=P9mGT5KGH8fMsgadwL3kBg&usg=AFQjCNHyns6nA5xkh31JgsIVpDiAZcdmQQ&cad=rja
[6] http://www.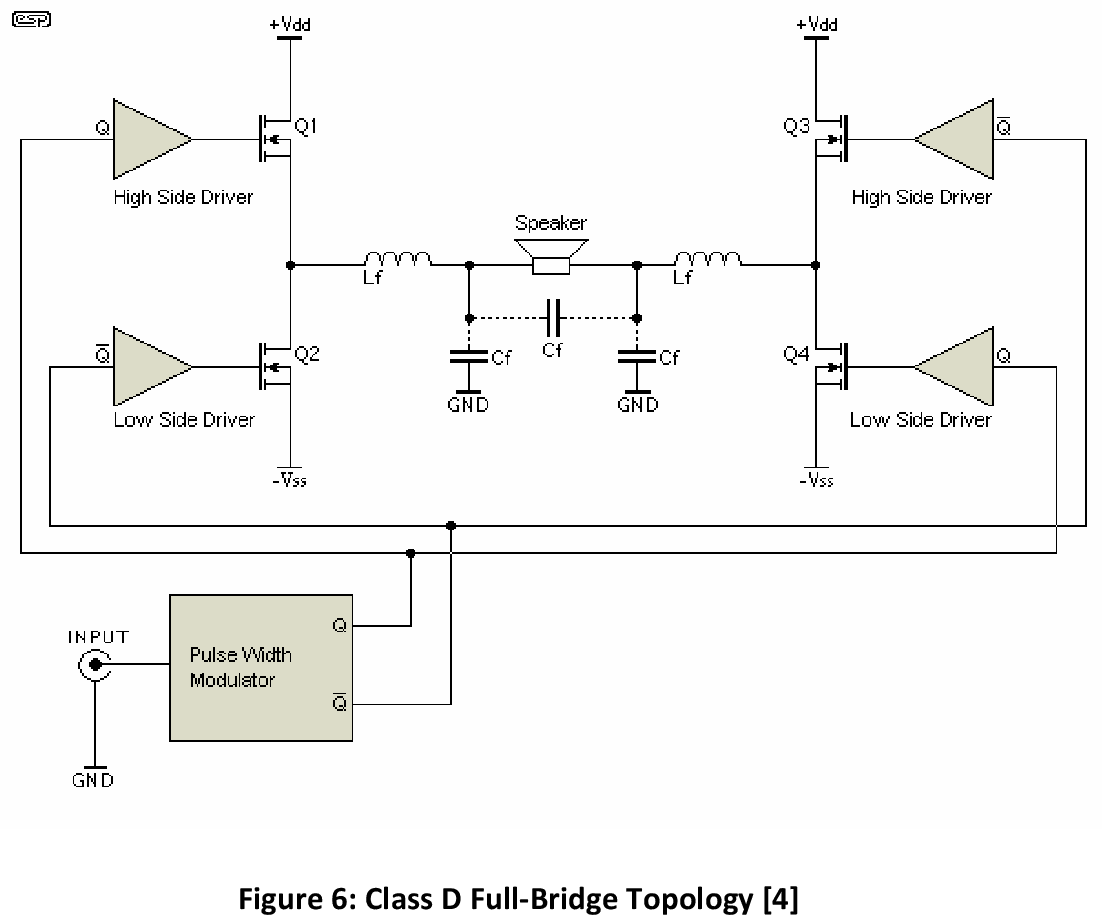 alldatasheet.com/datasheet-pdf/pdf/104297/IRF/IRF540Z.html
alldatasheet.com/datasheet-pdf/pdf/104297/IRF/IRF540Z.html
[7] http://www.epcos.com/web/generator/Web/Sections/DesignSupport/Tools/Ferrites/Page__License,locale=en.html
Контакты автора: Юрий Игнатьев
Украина, г. Ивано-Франковск, ул. Галицкая, 32, кв 147.
(Киевстар)+38 097 577-69-87, [email protected]
Усилители D-класса на микросхемах MAXIM
Усилители D-класса представляют собой устройства, в которых сначала производится преобразование входного аналогового сигнала в цифровой, промодулированный по частоте, длительности или амплитуде. На выходе усилителя происходит обратное преобразование с восстановлением формы исходного сигнала.
Усилители D-класса весьма экономичны, компактны, имеют высокий, порой превышающий 90 %, КПД, малые потери на коммутирующих элементах.
В этой связи такие устройства, как правило, не нуждаются в отводящих тепловую энергию радиаторах даже при выходной мощности усилителя десятки ватт.
В то же время КНЛ таких усилителей достаточно выражен. Это оправдывает применение усилителей D-класса в недорогой аппаратуре, аппаратуре связи, переговорных устройствах, мегафонах.
В качестве примера практической реализации рассмотрим ниже несколько D-усилителей, производимых фирмой MAXIM.
Усилитель МАХ 9712
МАХ 9712 — монофонический усилитель аудиосигналов D-класса, рис. 1. Микросхема потребляет ток в режиме молчания — 4 мА, в дежурном режиме — 0,1 мкА. Выходная мощность усилителя при работе на нагрузку 8 Ом — 500 мВт при КПД свыше 85 %. Благодаря использованию запатентованных технических решений фильтр на выходе усилителя, обычно используемый в усилителях D-класса для устранения коммутационных помех, не нужен. Одновременно снижено и паразитное излучение электромагнитных сигналов от микросхемы, что ранее было характерно для подобных усилителей. Коэффициент передачи усилителя не регулируется и равен 4 В/В. Усилитель имеет защиту от перегрева и короткого замыкания в нагрузке.
Микросхема использует две схемы модуляции: режим работы с фиксированной частотой и широкополосный режим, в котором снижается уровень электромагнитных излучений, имеющих частоту ниже частоты модуляции. Задающий генератор микросхемы МАХ 9712 может быть синхронизирован внешним сигналом, поданным на вход SYNC. Возможно объединение двух усилителей по схеме ведущий/ведомый для работы в стереорежиме.
Усилитель МАХ 9770
Микросхема МАХ 9770 (рис. 2) состоит одновременно из двух усилителей:
♦ маломощного линейного УНЧ на 80 мВт с выходом на головные телефоны сопротивлением 16 Ом;
♦ бесфильтрового монофонический усилителя D-класса с выходной мощностью до 1,2 Вт при работе на нагрузку сопротивлением 8 Ом.
КПД усилителя D-класса достигает 85 %. МАХ 9770 работает от однополярного источника питания напряжением 2,5—5,5 В.
Маломощный линейный УНЧ может работать при однополярном питании на заземленную нагрузку без использования разделительных конденсаторов. Вход датчика наушников позволяет обнаружить их подключение и автоматически переводит усилитель из одного режима работы в другой.
Вход датчика наушников позволяет обнаружить их подключение и автоматически переводит усилитель из одного режима работы в другой.
МАХ 9770 имеет встроенную логическую схему переключения коэффициента усиления и входной мультиплексор/миксер, позволяющий работать от нескольких источников сигнала.
В усилителе использована оригинальная схема подавления акустических щелчков при включении-выключении. Предусмотрена защита микросхемы от перегрева и от короткого замыкания в нагрузке. В дежурном режиме микросхема потребляет ток до 0,1 мкА.
Похожие радиосхемы и статьи:Сабвуферный усилитель класса D на основе TL494
Данная конструкция изначально создавалась просто для того, чтобы понять, что в действительности можно получить от усилителя класса D. Конечно, первая мысль была – найти какой-нибудь прототип, но длительные поиски в интернете не дали ничего кроме фраз “Да сделай ты это на TL494!”, но нигде не было никаких схем. Собирать на специализированной интегральной схеме (TDA8920) не представлялось возможным из-за ее дороговизны и дефицитности и ограниченной выходной мощности такого усилителя.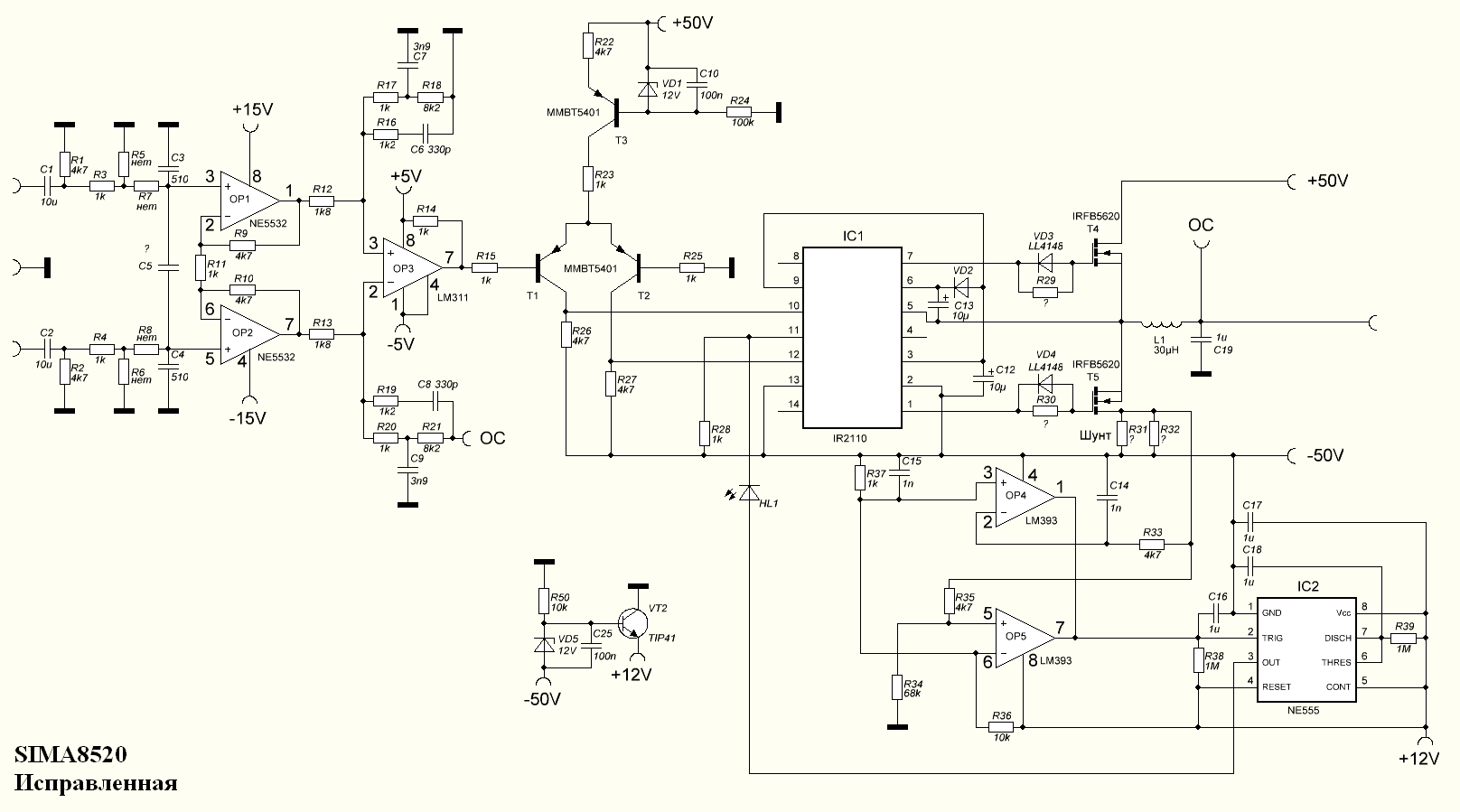 В общем, пришлось придумывать свое.
В общем, пришлось придумывать свое.
Сначала я хотел сделать усилитель, взяв за основу UC3842/3843 и использовать мощный выходной каскад на полевых транзисторах разной структуры, например, как в известной книге Шкритека (стр. 231). Подобный выходной каскад применен и в конструкции, публиковавшейся не так давно в журнале “Радио”. Очевидное преимущество такого каскада – простота, но есть и существенные недостатки. Во-первых, необходимо двуполярное питание, во-вторых, возможно протекание сквозного тока через транзисторы, в третьих, транзисторы разной структуры имеют разное сопротивление канала в открытом сосотоянии, что требует, по-хорошему, применения разного количества транзисторов в плечах (транзисторов с p-каналом нужно ставить больше), а это приводит к существенному усложнению конструкции. Все перечисленное приводит к тому, что реально от такого выходного каскада большую мощность не получить.
Учитывая изложенные причины, было принято решение делать мостовой выходной каскад на транзисторах с n-каналом.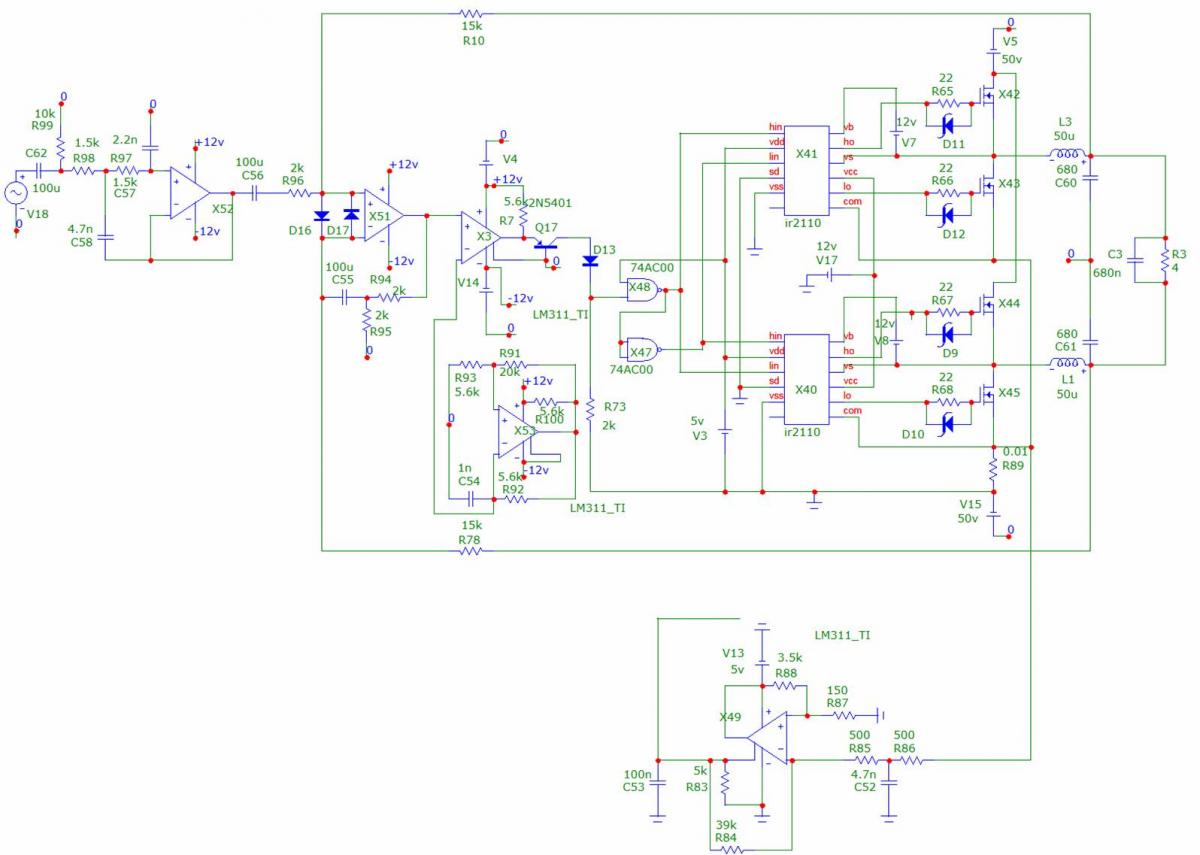 Несмотря на то, что такой каскад требует применения достаточно дорогостоящих драйверов (я применил IR2110), он свободен от всех недостатков простого выходного каскада, в частности, пользуясь такой схемой можно увеличивать выходную мощность, повышая напряжение питания, при этом при напряжении питания выходного каскада до 70-80 вольт можно применять дешевые ключевые транзисторы, например, IRF540, и снимать с выходного каскада мощность в несколько сотен Вт.
Несмотря на то, что такой каскад требует применения достаточно дорогостоящих драйверов (я применил IR2110), он свободен от всех недостатков простого выходного каскада, в частности, пользуясь такой схемой можно увеличивать выходную мощность, повышая напряжение питания, при этом при напряжении питания выходного каскада до 70-80 вольт можно применять дешевые ключевые транзисторы, например, IRF540, и снимать с выходного каскада мощность в несколько сотен Вт.
Что касается собственно ШИМ-модулятора, то здесь, рассматривалось 2 варианта – UC3843 и TL494. UC3843 очень неплох, т.к. используя его можно получить высокие тактовые частоты, но, к сожалению, он имеет однофазный выход, так что для того, чтобы использовать его для питания двухтактного каскада пришлось бы ставить еще несколько внешних элеменов для инвертирования выходного сигнала, в простейшем случае транзисторный ключ, а лучше еще один корпус логики. В противоположность UC3843, TL494 не позволяет получить тактовые частоты выше 300КГц (по паспорту, а реально и на 100КГц уже все не так гладко), но содержит внутри себя все необходимое, для постороения узла управления, позволяя ограничиться несколькими пассивными компонентами в обвязке. Поэтому, поразмыслив, я решил сделать усилитель все-таки на основе TL494.
Поэтому, поразмыслив, я решил сделать усилитель все-таки на основе TL494.
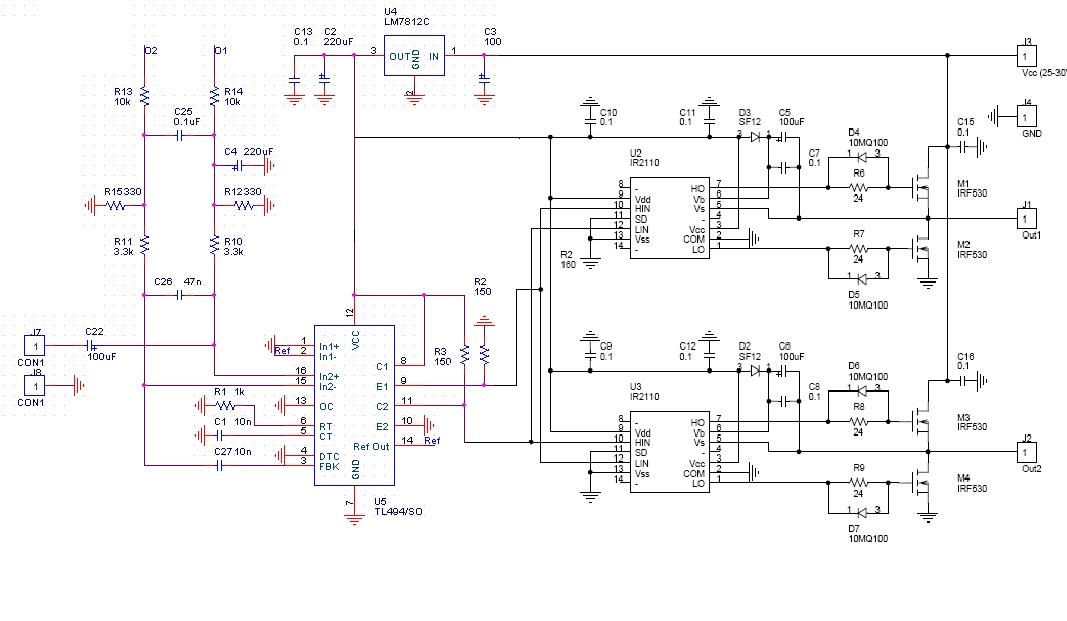
Схема собранного прототипа здесь. Тактовая частота генератора равна 100кГц, можно и больше, но при этом минимальная длительность импульса получается более 6% от периода колебания, что на мой взгляд, маловато. Конденсаторы С5 и С6 можно не устанавливать – достаточно 0.1мкФ. Как видно, схема не содержит обратной связи. С одной стороны, это делает ее чувствительной к изменению напряжения питания выходного каскада, с другой стороны, не стоит забывать, что это всего лишь макет прототипа, от него многого и не требовалось, лишь бы работал:) Схема отмакетирована, но печатная плата не разрабатывалась. Налаживание сводится к установке нуля на выходе подстроечным резистором.
Испытания проводились на низкочастотный громкоговоритель, представляющий из себя две параллельно соединенные головки 10ГД30 в ящике объемом около 50л, фильтр на выход усилителя не подключался, громкоговоритель был подключен к усилителю парой свитых проводов.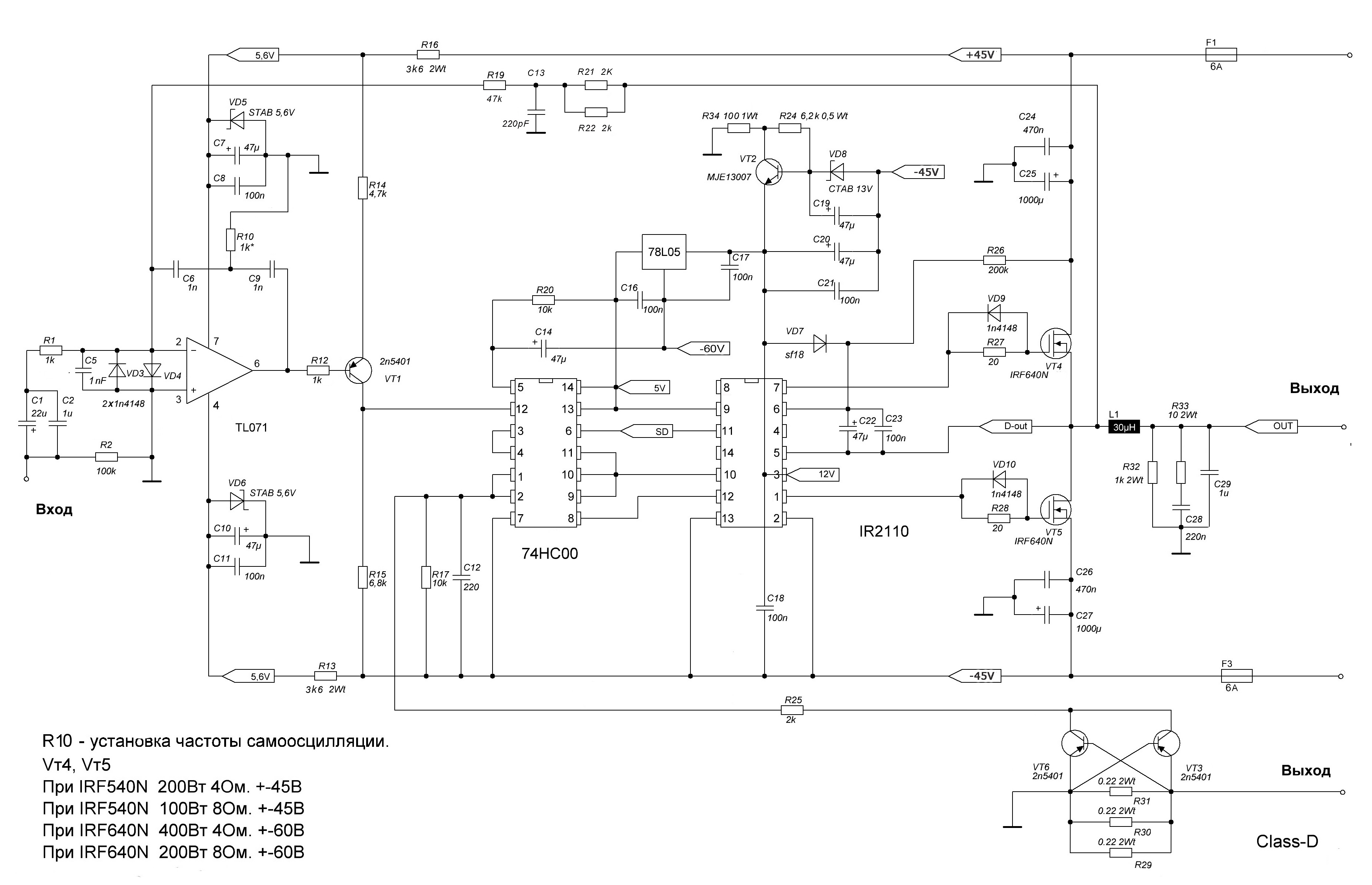 Выходные транзисторы на радиаторы не устанавливались, т.к. совершенно не грелись. Самое удивительное, что работает это неплохо и без обратной связи. Изначально планировалось использовать такой выходной каскад в мощном сабвуфере (и действительно, для построения сабвуфера такой усилитель подходит идеально), но после того, как я послушал, как это играет, мне показалось, что у такого усилителя есть достаточно высокий потенциал и при использовании в среднечастотном звене. Существенный момент – для того, чтобы такой усилитель нормально работал, полосу сигнала на входе нужно ограничить с помощью ФНЧ. Лучше, если частота среза будет не более одной десятой от тактовой (а лучше и еще меньше). Жаль, что не удалось поднять повыше тактовую частоту, может и на высоких было бы неплохо. Если позволит время, которого почти нет:(, попробую сделать на основе этого усилителя законченную конструкцию.
Выходные транзисторы на радиаторы не устанавливались, т.к. совершенно не грелись. Самое удивительное, что работает это неплохо и без обратной связи. Изначально планировалось использовать такой выходной каскад в мощном сабвуфере (и действительно, для построения сабвуфера такой усилитель подходит идеально), но после того, как я послушал, как это играет, мне показалось, что у такого усилителя есть достаточно высокий потенциал и при использовании в среднечастотном звене. Существенный момент – для того, чтобы такой усилитель нормально работал, полосу сигнала на входе нужно ограничить с помощью ФНЧ. Лучше, если частота среза будет не более одной десятой от тактовой (а лучше и еще меньше). Жаль, что не удалось поднять повыше тактовую частоту, может и на высоких было бы неплохо. Если позволит время, которого почти нет:(, попробую сделать на основе этого усилителя законченную конструкцию.
Если решите собирать такой усилитель, необходимо сразу задуматься о защите громкоговорителя от постоянного напряжения на выходе, т.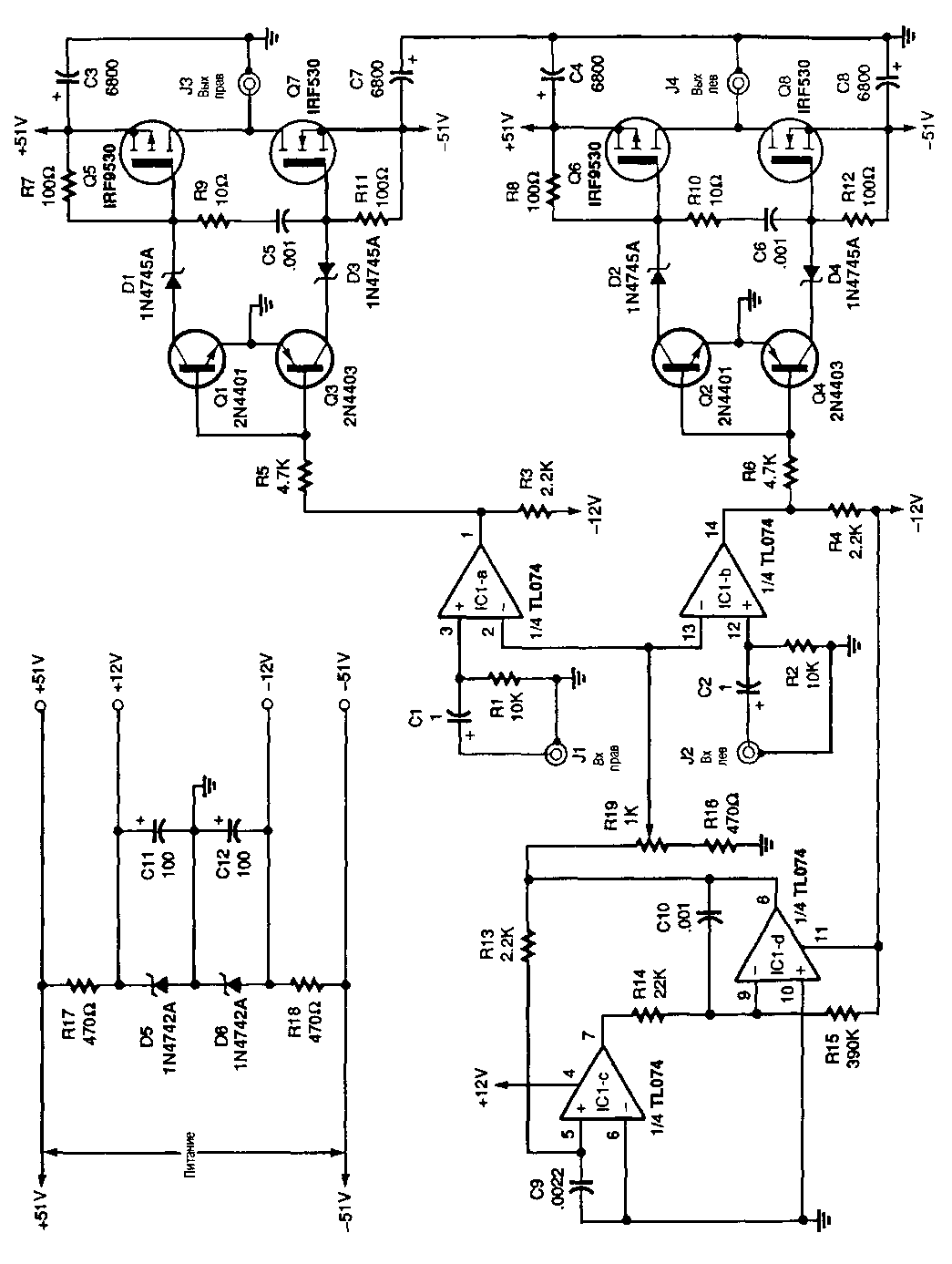 к. схема не содержит никаких средств поддержания нуля на выходе. Несмотря на то, что скважность определяется напряжением, привязанным к выходу опорного напряжения TL494 и поддерживается довольно точно, предусмотреть защиту все-таки следует. Что касается защиты от короткого замыкания в нагрузке, то при малых мощностях будет достаточно плавкого предохранителя, а при больших надо строить отдельную схему защиты – для этого можно использовать входы SD (Shutdown) драйверов IR2110. Для увеличения выходной мощности выходные ключи можно (и нужно) запитывать от отдельного источника напряжения. Примененные драйверы позволяют поднимать напряжение питания выходных ключей до 500В (я, правда, не могу себе представить, кому это может понадобиться), необходимо будет только применить диоды, рассчитанные на соответствующее напряжение, примененные SF12 имеют допустимое обратное напряжение 200В. Диоды D4-D7 обязательно должны быть диодами Шоттки. Наконец, в качестве дайверов можно применить IR2113 без внесения изменений в схему.
к. схема не содержит никаких средств поддержания нуля на выходе. Несмотря на то, что скважность определяется напряжением, привязанным к выходу опорного напряжения TL494 и поддерживается довольно точно, предусмотреть защиту все-таки следует. Что касается защиты от короткого замыкания в нагрузке, то при малых мощностях будет достаточно плавкого предохранителя, а при больших надо строить отдельную схему защиты – для этого можно использовать входы SD (Shutdown) драйверов IR2110. Для увеличения выходной мощности выходные ключи можно (и нужно) запитывать от отдельного источника напряжения. Примененные драйверы позволяют поднимать напряжение питания выходных ключей до 500В (я, правда, не могу себе представить, кому это может понадобиться), необходимо будет только применить диоды, рассчитанные на соответствующее напряжение, примененные SF12 имеют допустимое обратное напряжение 200В. Диоды D4-D7 обязательно должны быть диодами Шоттки. Наконец, в качестве дайверов можно применить IR2113 без внесения изменений в схему.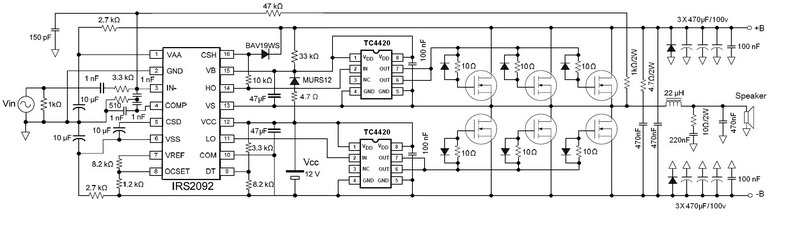
Полная схема выложена здесь.
Внимание! Именно в таком виде схема ни разу не собиралась. Собранное устройство не имело цепей защиты. Тип транзистора Q1 и стабилитрон в его коллекторе нужно выбирать исходя из напряжения питания, резисторы датчика тока – исходя из тока ограничения. Вообще, эта часть схемы нуждается в переработке. Именно так строить защиту не рекомендую. В остальном, схема была вполне рабочей, нормально работала от нестабилизированного источника питания.
И еще раз повторюсь, для нормальной работы данной схемы необходимо ограничить полосу входного сигнала (это относится ко всем усилителям класса D), на входе необходим ФНЧ, рекомендую – с частотой среза не более 1/10 от тактовой частоты задающего генератора, имея в виду сабвуферное предназначение. Кроме того, на схеме не показан дроссель выходного фильтра. Я собирал только макет, т.к. меня интересовала исключительно идея. В готовом устройстве выходной фильтр обязателен. Обратную связь при этом нужно снимать после фильтра.
Простые устройства – Усилитель D-класса на микроконтроллере
Усилители D-класса очень просты в изготовлении, обладают высоким КПД и позволяют получить большие мощности при малых затратах. Они используют ключевые режимы работы выходных каскадов, превращая сигнал в последовательность мощных импульсов, {ads2} которые затем, проходя через фильтр, частью которого может быть сам динамик или аккустическая система, освобождаются от высокочастотных составляющих, превращаясь в звук.
Наш американский коллега болгарского происхождения, Руслан Димитров, разработал усилитель мощностью 70 Вт при питании всего 12 вольт, причем поступил крайне нестандартно: в качестве основного элемента усилителя он применил микроконтроллер attiny45.
Выходные транзисторы, включенные по мостовой схеме, не нуждаются в радиаторах, в схеме нет никаких обратных связей. Мощность ограничена двумя факторами:
- точность цифрового тракта.
 увеличение усиления в “цифре” снизит качество при малых уровнях.
увеличение усиления в “цифре” снизит качество при малых уровнях. - ток стока MOSFET. применены транзисторы на 6 ампер, что дает в идеале 144 Вт мощности на нагрузке 4 Ом, или 72 Вт на нагрузке 2 Ома.
Для управления мостовым выходным каскадом использованы два имеющихся в микроконтроллере attiny45 аппаратных 8-битных ШИМ-модуля. На полной мощности используются все 8 бит, что дает весьма неплохое качество звука, однако на малых мощностях происходит резкое ухудшение, ведь при мощности 1% от максимальной реально используется всего 2 бита!
Чтобы обойти эту проблему, автор использовал прием, давно применяемый в компьютерной графике, называемый размазыванием (dithering). В графике таким способом получат визуально более богатую палитру изображения путем определенного перемешивания пикселей более бедной палитры (кстати, автор работает в компании nVidia – это о чем-то да говорит!). Руслан счел, что этот прием даст положительный эффект и для звука, и, по его словам, не ошибся.
Реализацию этого метода он сделал путем несимметричного управления плечами выходного моста: одно плечо управляется непосредственно ШИМ-сигналом, получаемым из АЦП водного сигнала, а вот второе плечо управляется “размазанным” ШИМ-сигналом. Рисунок поясняет сказанное.
Автор утверждает, что этот прием на слух дает очень заметный эффект: отказ от размазывания дает очень искаженный звук на малых сигналах.
Схема приведена на следующем рисунке (кликабельно). Как видите, она очень проста и практически не нуждается в пояснениях. Автор использовал светодиоды в качестве стабилитронов – это возможно, хотя и с моей точки зрения не является необходимым.
L1C4 – это выходной фильтр. Индуктивность образована 6 витками толстого провода на кольце из блока питания компьютера. Выходной ШИМ работает на частоте 64 КГц, по которой и можно провести расчет выходного фильтра. R9C6 это входной фильтр, необходимый для качественной работы АЦП микроконтроллера, работающего на частоте 78 КГц. Исходный текст управляющей программы очень прост, скачать его можно с нашего сайта.
Исходный текст управляющей программы очень прост, скачать его можно с нашего сайта.
Оригинал статьи находится на сайте автора:
http://rdimitrov.info/blog/show.php?entry=Microcontroller%20Class%20D%20Amplifier{ads1}
Усилитель собран на макетной плате, т.е. печатная не разрабатывалась. При повторении, с моей точки зрения, следует разработать печатную плату, тщательно разделив цепи силового питания и земли от слаботочной части схемы – входа и микроконтроллера. Очевидно, светодиоды в схеме моста можно заменить на стабилитроны, а для питания микроконтроллера использовать обычный стабилизатор на микросхеме 7805 или аналогичной. Автор не имеет приборов для измерения параметров качества звука, но утверждает, что на слух усилитель звучит весьма достойно – он применил его для фронтальных колонок своего автомобиля.
Все рисунки и фотографии сделаны автором, права на них принадлежат ему.
| Файл | Описание | Размер файла: |
|---|---|---|
src. zip zip | Исходник программы для усилителя (WinAVR) | 1 Кб |
ВведениеБольшинство инженеров-проектировщиков аудиосистем хорошо осведомлены о преимуществах энергоэффективности усилителей класса D по сравнению с линейными аудиоусилителями классов, таких как классы A, B и AB. В линейных усилителях, таких как класс AB, значительные потери мощности теряются из-за элементов смещения и линейной работы выходных транзисторов. Поскольку транзисторы усилителя класса D используются просто как переключатели для управления током через нагрузку, минимальная мощность теряется из-за выходного каскада.Любые потери мощности, связанные с усилителем класса D, в первую очередь связаны с активным сопротивлением выходного транзистора, коммутационными потерями и накладными расходами по току покоя. Большая часть мощности, теряемой усилителем, рассеивается в виде тепла. Поскольку требования к радиаторам в усилителях класса D могут быть значительно уменьшены или полностью устранены, они идеально подходят для компактных мощных приложений. В прошлом преимущество классических усилителей класса D на основе ШИМ в энергоэффективности затмевалась стоимостью компонентов внешнего фильтра, совместимостью с электромагнитными помехами и электромагнитной совместимостью и низкими характеристиками THD + N по сравнению с линейными усилителями.Однако в большинстве усилителей класса D текущего поколения используются передовые методы модуляции и обратной связи для смягчения этих проблем. Основы усилителей класса DХотя в современных усилителях класса D используется множество топологий модулятора, в самой базовой топологии используется широтно-импульсная модуляция (ШИМ) с треугольным (или пилообразным) генератором. На рисунке 1 показана упрощенная блок-схема полумостового усилителя класса D на основе ШИМ. Он состоит из широтно-импульсного модулятора, двух выходных полевых МОП-транзисторов и внешнего фильтра нижних частот (L F и C F ) для восстановления усиленного аудиосигнала.Как показано на рисунке, полевые МОП-транзисторы с p-каналом и n-каналом работают как переключатели управления током, поочередно подключая выходной узел к V DD и земле.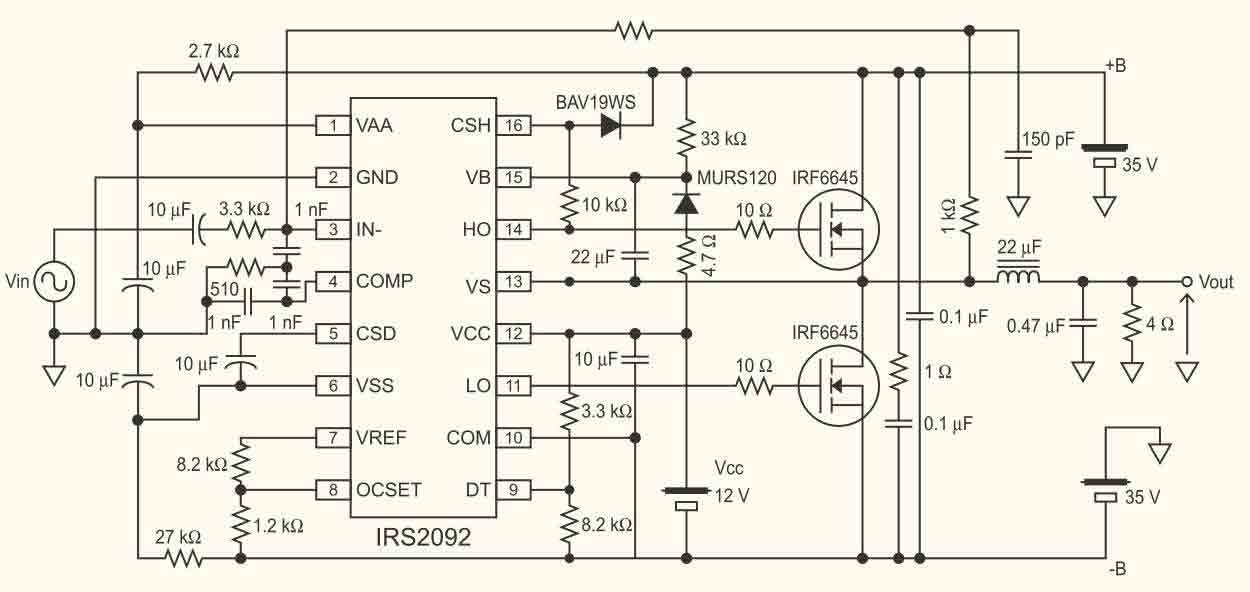 Поскольку выходные транзисторы переключают выход либо на V DD , либо на землю, результирующий выход усилителя класса D представляет собой высокочастотную прямоугольную волну. Частота переключения (f SW ) для большинства усилителей класса D обычно составляет от 250 кГц до 1,5 МГц. Выходной прямоугольный сигнал модулируется широтно-импульсной модуляцией входным звуковым сигналом.ШИМ достигается путем сравнения входящего аудиосигнала с внутренне генерируемым треугольным (или пилообразным) генератором. Этот тип модуляции также часто называют «естественной дискретизацией», когда треугольный генератор действует как тактовая частота дискретизации. Результирующий рабочий цикл прямоугольной волны пропорционален уровню входного сигнала. Когда входной сигнал отсутствует, рабочий цикл выходного сигнала равен 50%. Рисунок 2 иллюстрирует результирующую форму выходного сигнала ШИМ из-за переменного уровня входного сигнала. Поскольку выходные транзисторы переключают выход либо на V DD , либо на землю, результирующий выход усилителя класса D представляет собой высокочастотную прямоугольную волну. Частота переключения (f SW ) для большинства усилителей класса D обычно составляет от 250 кГц до 1,5 МГц. Выходной прямоугольный сигнал модулируется широтно-импульсной модуляцией входным звуковым сигналом.ШИМ достигается путем сравнения входящего аудиосигнала с внутренне генерируемым треугольным (или пилообразным) генератором. Этот тип модуляции также часто называют «естественной дискретизацией», когда треугольный генератор действует как тактовая частота дискретизации. Результирующий рабочий цикл прямоугольной волны пропорционален уровню входного сигнала. Когда входной сигнал отсутствует, рабочий цикл выходного сигнала равен 50%. Рисунок 2 иллюстрирует результирующую форму выходного сигнала ШИМ из-за переменного уровня входного сигнала. Чтобы извлечь усиленный аудиосигнал из этого сигнала ШИМ, выходной сигнал усилителя класса D подается на фильтр нижних частот. LC-фильтр нижних частот, показанный на рисунке 1, действует как пассивный интегратор (при условии, что частота среза фильтра по крайней мере на порядок ниже, чем частота переключения выходного каскада), выходной сигнал которого равен среднему значению прямоугольной волны. .Кроме того, фильтр нижних частот предотвращает рассеяние высокочастотной коммутационной энергии в резистивной нагрузке. Предположим, что отфильтрованные выходное напряжение (V O_AVG ) и ток (I AVG ) остаются постоянными в течение одного периода переключения. Это предположение является довольно точным, потому что f SW намного больше, чем самая высокая входная звуковая частота. Следовательно, взаимосвязь между рабочим циклом и результирующим отфильтрованным выходным напряжением может быть получена с помощью простого анализа во временной области напряжения и тока катушки индуктивности. Мгновенный ток, протекающий через катушку индуктивности, равен: где V L (t) – мгновенное напряжение на катушке индуктивности с использованием знака, показанного на рисунке 1. Поскольку средний ток (I AVG ), протекающий в нагрузку, предполагается постоянным в течение одного периода переключения, ток индуктора в начале периода переключения (T SW ) должен быть равен току индуктора в конце периода переключения, как показано на Рис. . С математической точки зрения это означает, что: Уравнение 2 показывает, что интеграл напряжения индуктора за один период переключения должен быть равен 0. Используя уравнение 2 и исследуя форму сигнала V L (t), показанную на рисунке 3, становится ясно, что абсолютные значения области (A ON и A OFF ) должны быть равны друг другу, чтобы уравнение 2 было истинным. Подставив уравнения 4 и 5 в уравнение 3, мы получим новое уравнение: Наконец, решение для V O дает: где D – скважность сигнала переключения выхода. Использование обратной связи для повышения производительностиМногие усилители класса D используют отрицательную обратную связь от выхода ШИМ до входа устройства.Подход с обратной связью не только улучшает линейность устройства, но также позволяет устройству иметь отказ от источника питания. Это контрастирует с усилителем с разомкнутым контуром, который по своей сути имеет минимальное (если есть) подавление подачи питания. Поскольку форма выходного сигнала воспринимается и возвращается на вход усилителя в топологии с замкнутым контуром, отклонения в шине питания обнаруживаются на выходе и корректируются контуром управления.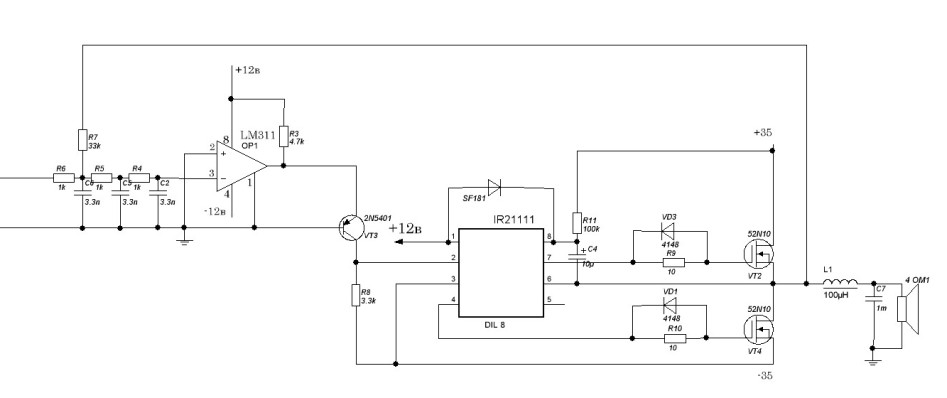 Преимущества конструкции с обратной связью достигаются ценой возможных проблем со стабильностью, как и в случае со всеми системами, использующими обратную связь.Следовательно, контур управления должен быть тщательно спроектирован и скомпенсирован для обеспечения стабильности во всех рабочих условиях. Типовые усилители Преимущества конструкции с обратной связью достигаются ценой возможных проблем со стабильностью, как и в случае со всеми системами, использующими обратную связь.Следовательно, контур управления должен быть тщательно спроектирован и скомпенсирован для обеспечения стабильности во всех рабочих условиях. Типовые усилители класса D работают с контуром обратной связи с формированием шума, что значительно снижает внутриполосный шум из-за нелинейностей широтно-импульсного модулятора, выходного каскада и отклонений напряжения питания. Эта топология аналогична формированию шума, используемому в сигма-дельта модуляторах. Чтобы проиллюстрировать эту функцию формирования шума, Рис. 4 показывает упрощенную блок-схему формирователя шума 1-го порядка.Сеть обратной связи обычно состоит из цепи резистивного делителя, но для простоты в примере, показанном на рисунке 4, используется коэффициент обратной связи, равный 1. Кроме того, передаточная функция для интегратора была упрощена до 1 / с, поскольку коэффициент усиления идеальный интегратор обратно пропорционален частоте. Уравнение 8 показывает, что шумовой член E n (s) умножается на функцию фильтра верхних частот (функция передачи шума), в то время как входной член, V IN (s), умножается на фильтр нижних частот. функция фильтра (функция передачи сигнала). Отклик фильтра верхних частот функции передачи шума формирует шум усилителя класса D. Если частота среза выходного фильтра выбрана правильно, большая часть шума выталкивается за пределы полосы (рисунок 4).В то время как предыдущий пример имел дело с формирователем шума 1-го порядка, многие современные усилители класса D используют топологии формирования шума нескольких порядков для дальнейшей оптимизации линейности и подавления подачи питания. класса D – полумост против полного мостаМногие усилители класса D также реализованы с использованием полного мостового выходного каскада. Полный мост использует две ступени полумоста для дифференцированного управления нагрузкой. Этот тип подключения нагрузки часто называют мостовой нагрузкой (BTL). Как показано на рис. 5 , полная мостовая конфигурация работает, чередуя путь проводимости через нагрузку.Это позволяет двунаправленному току проходить через нагрузку без необходимости в отрицательном источнике питания или блокирующем конденсаторе постоянного тока. На рисунке 6 показаны формы выходных сигналов традиционных усилителей класса D на основе BTL и ШИМ. На рисунке 6 формы выходных сигналов дополняют друг друга, что создает дифференциальный сигнал ШИМ через нагрузку.Как и в случае с полумостовой топологией, на выходе необходим внешний LC-фильтр для извлечения низкочастотных аудиосигналов и предотвращения рассеивания высокочастотной энергии в нагрузке. Полномостовой усилитель класса D обладает теми же преимуществами, что и BTL-усилитель класса AB, но при этом имеет высокий КПД по мощности. Первое преимущество усилителей BTL заключается в том, что им не требуются конденсаторы блокировки по постоянному току на выходах при работе от одного источника питания.То же самое не относится к полумостовому усилителю, поскольку его выходной сигнал колеблется между V DD и землей и холостым ходом при рабочем цикле 50%. Это означает, что его выход имеет смещение постоянного тока, равное V DD /2. В полномостовом усилителе это смещение появляется на каждой стороне нагрузки, что означает, что на выходе протекает нулевой постоянный ток. Второе преимущество, которое они разделяют, заключается в том, что они могут достигать двукратного увеличения размаха выходного сигнала по сравнению с полумостовым усилителем с тем же напряжением питания, поскольку нагрузка управляется дифференциально. Однако полумостовой усилитель класса D требует вдвое больше переключателей MOSFET, чем полумостовая топология. Некоторые считают это недостатком, поскольку большее количество переключателей обычно означает больше потерь проводимости и переключения. Однако, как правило, это справедливо только для усилителей мощности с высокой выходной мощностью (> 10 Вт) из-за более высоких выходных токов и напряжений питания.По этой причине полумостовые усилители обычно используются для приложений большой мощности из-за их небольшого повышения эффективности. Большинство мощных полномостовых усилителей демонстрируют КПД в диапазоне от 80% до 88% при нагрузке 8 Ом. Однако полумостовые усилители, такие как MAX9742, достигают КПД более 90%, обеспечивая при этом более 14 Вт на канал при сопротивлении 8 Ом. Устранение выходного фильтра – модуляция без фильтраОдним из основных недостатков традиционных усилителей класса D является необходимость внешнего LC-фильтра.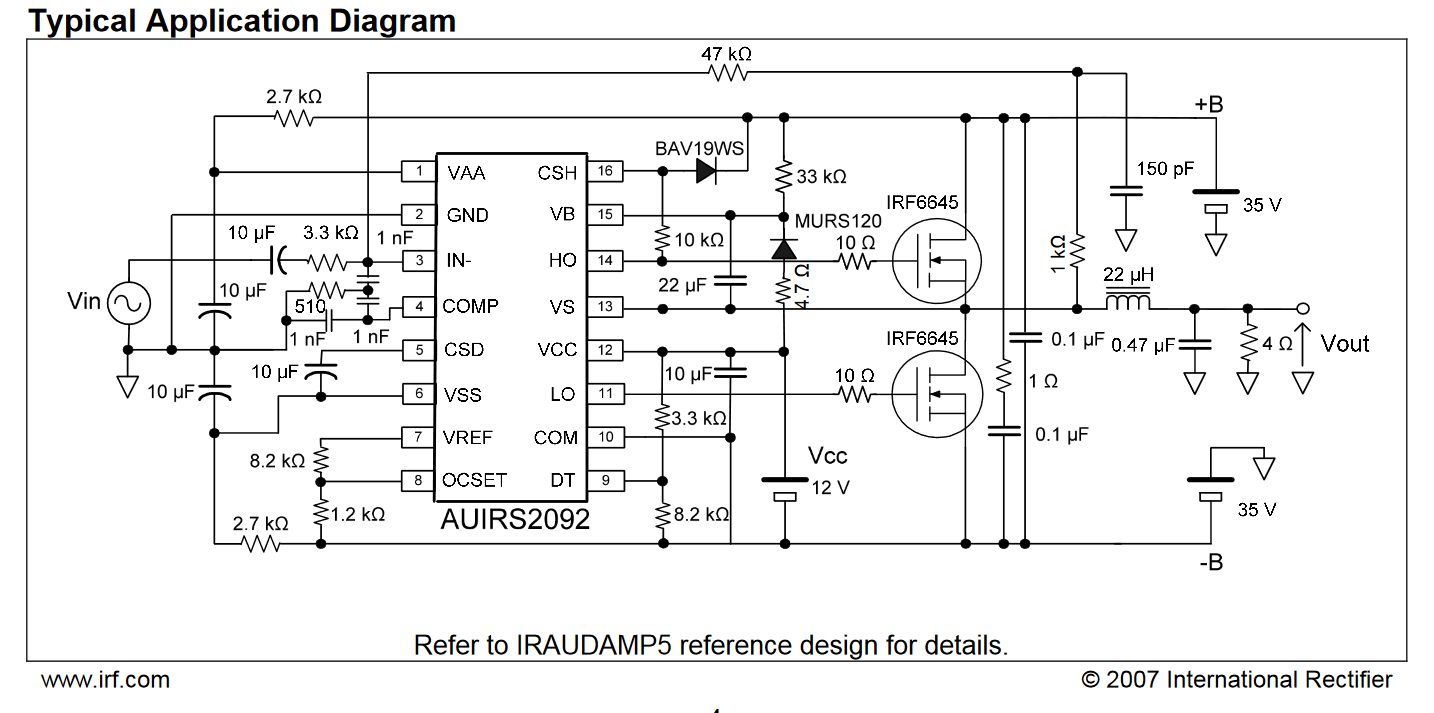 Это не только увеличивает стоимость решения и требования к пространству на плате, но также вносит возможность дополнительных искажений из-за нелинейностей компонентов фильтра. К счастью, во многих современных усилителях класса D используются усовершенствованные схемы модуляции «без фильтров» для устранения или, по крайней мере, минимизации требований к внешним фильтрам. Это не только увеличивает стоимость решения и требования к пространству на плате, но также вносит возможность дополнительных искажений из-за нелинейностей компонентов фильтра. К счастью, во многих современных усилителях класса D используются усовершенствованные схемы модуляции «без фильтров» для устранения или, по крайней мере, минимизации требований к внешним фильтрам. На рисунке 7 показана упрощенная функциональная схема топологии безфильтрового модулятора MAX9700. В отличие от традиционного усилителя PWM BTL, каждый полумост имеет собственный выделенный компаратор, который позволяет управлять каждым выходом независимо.Модулятор управляется дифференциальным звуковым сигналом и высокочастотной пилообразной формой волны. Когда на обоих выходах компаратора низкий уровень, на каждом выходе усилителя класса D высокий уровень. В то же время выход логического элемента ИЛИ-НЕ становится высоким, но задерживается RC-цепью, сформированной R ON и C ON . Как только задержанный выход логического элемента ИЛИ-НЕ превышает заданный порог, переключатели SW1 и SW2 замыкаются. Поскольку выходы MAX9700 находятся в состоянии покоя с синфазными сигналами, на нагрузку не подается дифференциальное напряжение, что сводит к минимуму энергопотребление в режиме покоя без необходимости во внешнем фильтре.Вместо того, чтобы полагаться на внешний LC-фильтр для извлечения аудиосигнала из выхода, усилители Maxim без фильтров класса D полагаются на внутреннюю индуктивность нагрузки динамика и человеческого уха для восстановления аудиосигнала. Сопротивление динамика (R E ) и индуктивность (L E ) образуют фильтр нижних частот 1-го порядка, частота среза которого равна: Для большинства динамиков этого спада 1-го порядка достаточно для восстановления звуковой сигнал и предотвращает рассеяние чрезмерного количества высокочастотной энергии переключения в сопротивлении динамика.Даже если остаточная энергия переключения приводит к движению динамика, эти частоты не слышны человеческому уху и не повлияют отрицательно на качество прослушивания. Минимизация электромагнитных помех с помощью модуляции с расширенным спектромОдним из недостатков работы без фильтра является возможность излучаемых электромагнитных помех от кабелей громкоговорителей.Поскольку выходные сигналы усилителя класса D представляют собой высокочастотные прямоугольные волны с быстро движущимися краями перехода, выходной спектр содержит большое количество спектральной энергии на частоте переключения и целые числа, кратные частоте переключения. Без внешнего выходного фильтра, расположенного в непосредственной близости от устройства, эта высокочастотная энергия может излучаться кабелями динамика. Безфильтровые усилители класса D компании Maxim помогают смягчить возможные проблемы с электромагнитными помехами за счет схемы модуляции, известной как модуляция с расширенным спектром.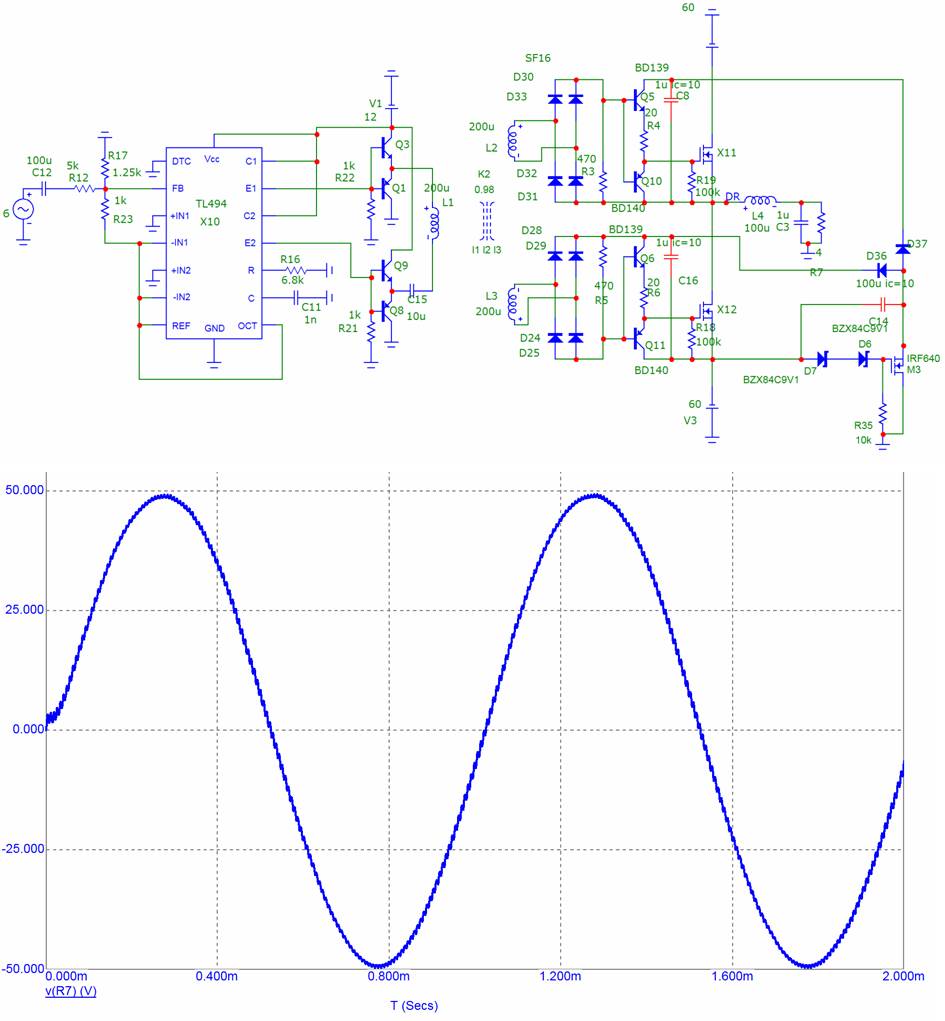 Модуляция с расширенным спектром достигается путем сглаживания или рандомизации частоты переключения усилителя класса D. Частота коммутации обычно изменяется до ± 10% от номинальной частоты коммутации. В то время как период формы волны переключения изменяется случайным образом от цикла к циклу, рабочий цикл не изменяется, тем самым сохраняя аудиосодержание формы волны переключения. На рисунках 9a, и , 9b, показан широкополосный выходной спектр MAX9700, чтобы проиллюстрировать эффекты модуляции с расширенным спектром.Вместо того, чтобы концентрировать спектральную энергию на частоте переключения и ее гармониках, модуляция с расширенным спектром эффективно расширяет спектральную энергию выходного сигнала. Другими словами, общее количество энергии, присутствующей в выходном спектре, остается прежним, но общая энергия перераспределяется по более широкой полосе пропускания. Это уменьшает пики высокочастотной энергии на выходах, тем самым сводя к минимуму вероятность излучения электромагнитных помех кабелями громкоговорителей. Многие безфильтровые усилители Maxim класса D также позволяют синхронизировать частоту коммутации с внешним тактовым сигналом. Это позволяет пользователю вручную установить частоту переключения усилителя в менее чувствительный частотный диапазон. Хотя модуляция с расширенным спектром значительно улучшает характеристики электромагнитных помех безфильтрованных усилителей класса D, обычно существует практическое ограничение на длину кабелей громкоговорителей, которые могут быть использованы до того, как устройство перестанет соответствовать нормам FCC или CE по излучаемым излучениям. ЗаключениеПоследние достижения в методах модуляции класса D позволили усилителям класса D процветать в приложениях, где когда-то доминировали линейные усилители. Современные усилители класса D обладают всеми преимуществами усилителей класса AB (т. Е. Хорошей линейностью и минимальными требованиями к месту на плате) с дополнительным бонусом в виде высокой энергоэффективности.В настоящее время доступно большое количество усилителей класса D, что делает их пригодными для множества приложений.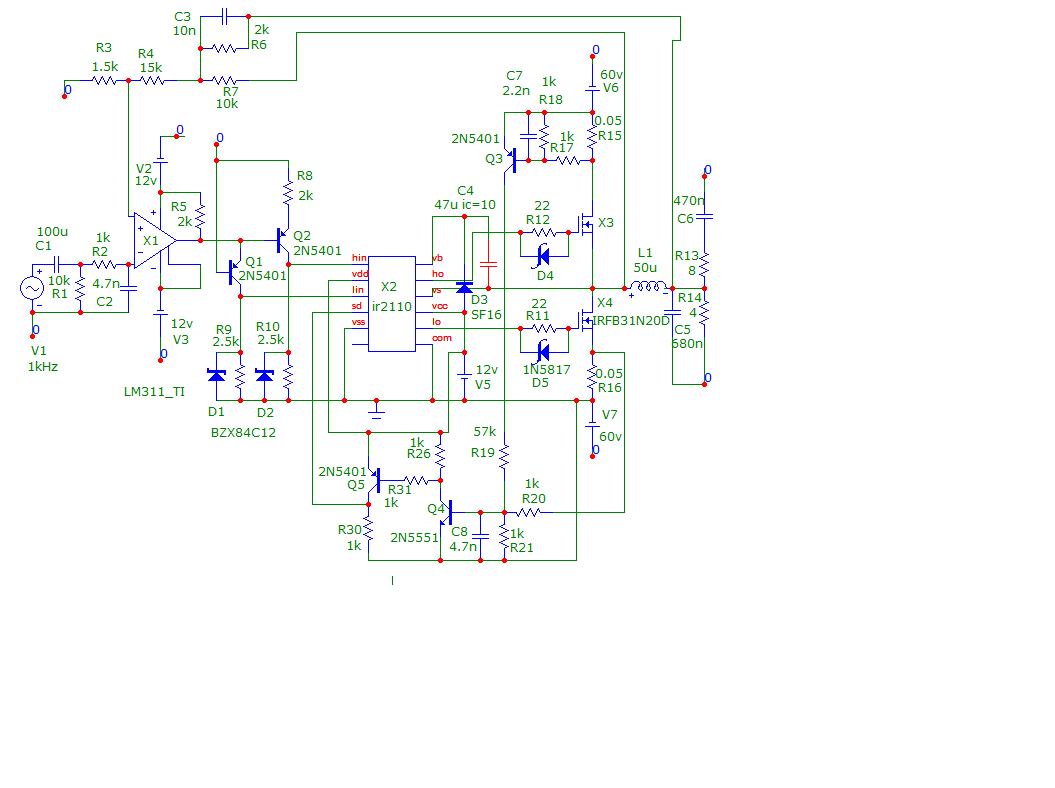 Эти приложения варьируются от портативных приложений с низким энергопотреблением (например, сотовых телефонов, ноутбуков), в которых время автономной работы, требования к пространству на плате и соответствие требованиям к электромагнитным помехам имеют первостепенное значение, до приложений с высоким энергопотреблением (например, автомобильных звуковых систем или плоских панелей). дисплеев), где минимизация требований к теплоотводу и тепловыделению жизненно важна. Фундаментальное понимание усилителей класса D и их последних технологических достижений поможет разработчикам выбрать правильный усилитель для своего применения и позволит им успешно взвесить преимущества и недостатки конкретных характеристик. Эти приложения варьируются от портативных приложений с низким энергопотреблением (например, сотовых телефонов, ноутбуков), в которых время автономной работы, требования к пространству на плате и соответствие требованиям к электромагнитным помехам имеют первостепенное значение, до приложений с высоким энергопотреблением (например, автомобильных звуковых систем или плоских панелей). дисплеев), где минимизация требований к теплоотводу и тепловыделению жизненно важна. Фундаментальное понимание усилителей класса D и их последних технологических достижений поможет разработчикам выбрать правильный усилитель для своего применения и позволит им успешно взвесить преимущества и недостатки конкретных характеристик. | |
 Обладая этой информацией, мы можем теперь вывести выражение для отфильтрованного выходного напряжения через коэффициент заполнения формы волны переключения:
Обладая этой информацией, мы можем теперь вывести выражение для отфильтрованного выходного напряжения через коэффициент заполнения формы волны переключения: Также предполагается, что блок ШИМ имеет вклад в единичное усиление и нулевой фазовый сдвиг в контур управления. Используя базовый анализ блока управления, для выходных данных можно получить следующее выражение:
Также предполагается, что блок ШИМ имеет вклад в единичное усиление и нулевой фазовый сдвиг в контур управления. Используя базовый анализ блока управления, для выходных данных можно получить следующее выражение:
 Это приводит к теоретическому увеличению максимальной выходной мощности в 4 раза по сравнению с полумостовым усилителем, работающим от того же источника питания.
Это приводит к теоретическому увеличению максимальной выходной мощности в 4 раза по сравнению с полумостовым усилителем, работающим от того же источника питания. Это приводит к тому, что OUT + и OUT- становятся низкими и остаются такими до начала следующего периода выборки.Эта схема вызывает включение обоих выходов на минимальное время (t ВКЛ (МИН) ), которое устанавливается значениями R ВКЛ и C ВКЛ . Как показано на рис. 8 , при нулевом входе выходы находятся в фазе с шириной импульса, равной t ON (MIN) . По мере увеличения или уменьшения входных аудиосигналов один компаратор срабатывает раньше другого. Это поведение, наряду с минимальным временем включения схемы, заставляет один выход изменять ширину импульса, в то время как ширина другого выходного импульса остается на уровне t ВКЛ (МИН) (рисунок 8).Это означает, что среднее значение каждого выхода содержит версию выходного аудиосигнала с полуволновым выпрямлением. Если взять разницу средних значений выходных сигналов, получится полная форма выходного аудиосигнала.
Это приводит к тому, что OUT + и OUT- становятся низкими и остаются такими до начала следующего периода выборки.Эта схема вызывает включение обоих выходов на минимальное время (t ВКЛ (МИН) ), которое устанавливается значениями R ВКЛ и C ВКЛ . Как показано на рис. 8 , при нулевом входе выходы находятся в фазе с шириной импульса, равной t ON (MIN) . По мере увеличения или уменьшения входных аудиосигналов один компаратор срабатывает раньше другого. Это поведение, наряду с минимальным временем включения схемы, заставляет один выход изменять ширину импульса, в то время как ширина другого выходного импульса остается на уровне t ВКЛ (МИН) (рисунок 8).Это означает, что среднее значение каждого выхода содержит версию выходного аудиосигнала с полуволновым выпрямлением. Если взять разницу средних значений выходных сигналов, получится полная форма выходного аудиосигнала.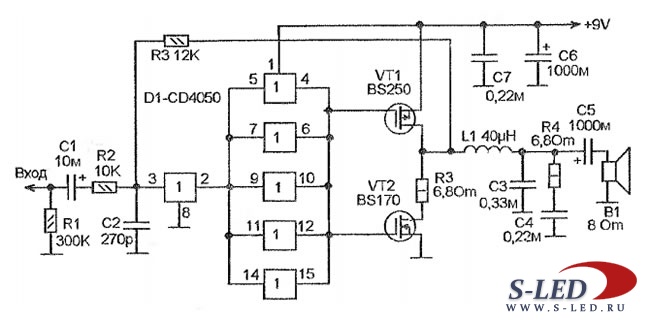 MAX9700.
MAX9700.  При использовании усилителей класса D без фильтра нагрузка динамика должна оставаться индуктивной на частоте переключения усилителя для достижения максимальной выходной мощности.
При использовании усилителей класса D без фильтра нагрузка динамика должна оставаться индуктивной на частоте переключения усилителя для достижения максимальной выходной мощности. Хотя возможно, что некоторый спектральный шум может перераспределяться в звуковой диапазон с модуляцией с расширенным спектром, этот шум подавляется функцией формирования шума контура обратной связи.
Хотя возможно, что некоторый спектральный шум может перераспределяться в звуковой диапазон с модуляцией с расширенным спектром, этот шум подавляется функцией формирования шума контура обратной связи. Если устройство не проходит испытания на излучение из-за длинных кабелей громкоговорителей, может потребоваться внешний выходной фильтр для обеспечения дополнительного ослабления высокочастотных компонентов выходного сигнала. Во многих приложениях с умеренной длиной кабеля динамика достаточно использовать ферритовые фильтры / конденсаторные фильтры на выходах.Характеристики электромагнитных помех также очень чувствительны к компоновке, поэтому необходимо строго соблюдать соответствующие инструкции по компоновке печатных плат, чтобы гарантировать соответствие применимым нормам FCC и CE.
Если устройство не проходит испытания на излучение из-за длинных кабелей громкоговорителей, может потребоваться внешний выходной фильтр для обеспечения дополнительного ослабления высокочастотных компонентов выходного сигнала. Во многих приложениях с умеренной длиной кабеля динамика достаточно использовать ферритовые фильтры / конденсаторные фильтры на выходах.Характеристики электромагнитных помех также очень чувствительны к компоновке, поэтому необходимо строго соблюдать соответствующие инструкции по компоновке печатных плат, чтобы гарантировать соответствие применимым нормам FCC и CE.Принципиальная схема усилителя класса D.
Контекст 1
… Усилитель класса D, изображенный на рис. 1, содержит ШИМ, выходной каскад и LC-фильтр нижних частот. При ШИМ компаратор сравнивает входной модулирующий сигнал с внутренне сгенерированной формой несущей волны, обычно зубчатой или треугольной [4] – [11], и генерирует серию модулированных по ширине сигналов. импульсы – сигнал ШИМ. Выходной каскад класса D – es-…
импульсы – сигнал ШИМ. Выходной каскад класса D – es-…
Контекст 2
… небольшие последствия, так как это устраняется с помощью выходного каскада, сконфигурированного в виде моста. Третий член (гармоники несущей) и последние члены (продукты интермодуляции между основной и гармонической составляющими модулирующего сигнала и несущей) либо незначительны, либо эффективно удаляются фильтром нижних частот, изображенным на Рис. 1. Следовательно, двухсторонний модулированный выходной сигнал ШИМ идеального усилителя класса D будет содержать только второй член в (4), где нет гармоник.Проще говоря, THD ШИМ, генерируемого треугольной несущей, в идеале равен нулю, поскольку THD сигнала ШИМ, генерируемого отдельным идеальным задним фронтом …
Context 3
… теоретический Фурье При выводе коэффициентов ряда в (21) мы суммируем на рис. 10 THD (at) как функцию степени нелинейности несущей. Здесь отметим, что, как и следовало ожидать, THD увеличивается с нелинейностью несущей, т. е. с уменьшением.В этом исследовании мы рекомендуем диапазон от 1,5 до 2,0 для. Обратите внимание, что максимальное значение не может быть выбрано произвольно, потому что большое будет уменьшать …
е. с уменьшением.В этом исследовании мы рекомендуем диапазон от 1,5 до 2,0 для. Обратите внимание, что максимальное значение не может быть выбрано произвольно, потому что большое будет уменьшать …
Контекст 4
… входного модулирующего сигнала от 1,5 до 2,0 является приблизительно и приводит к приемлемому размаху сигнала в практических реализациях. . В слуховых аппаратах и других низковольтных электронных приборах динамический диапазон обычно ограничен, и его необходимо по возможности сохранять. Стоит отметить, что такие же результаты мы получаем на рис.10, если мы определим THD путем выполнения БПФ для выходного сигнала ШИМ, полученного из исходного синусоидального входного модулирующего сигнала и двусторонней экспоненциальной машины- …
Контекст 5
… THD, полученный из MATLAB [(21)], моделирования HSPICE и практических измерений для различных индексов модуляции для двух нелинейностей несущей, 0,5 и 1,5. Моделирование HSPICE представляет собой моделирование практической схемы, изображенной на рис. 5.С другой стороны, измерения основаны на схемах, построенных из …
5.С другой стороны, измерения основаны на схемах, построенных из …
Context 6
… [(21)], моделирования HSPICE и практических измерений для разных индексов модуляции для двух несущих нелинейности 0,5 и 1,5. Моделирование HSPICE представляет собой моделирование практической схемы, изображенной на рис. 5. Измерения, с другой стороны, основаны на схемах, построенных из готовых устройств, подключенных к прототипу ИС (рис. 12), воплощающих Выходные каскады класса D.Мы отмечаем из рис. 11, что THD, определенные из (21), HSPICE и измерения хорошо согласуются, тем самым подтверждая наши аналитические выражения в разделе II-B ранее. Основываясь на этом исследовании, мы рекомендуем выбирать значение между 1,5 и 2,0, и этот диапазон соответствует нашей предыдущей рекомендации. …
Контекст 7
… различные индексы модуляции для двух нелинейностей несущей, 0,5 и 1,5. Моделирование HSPICE представляет собой моделирование практической схемы, изображенной на рис. 5. С другой стороны, измерения основаны на схемах, построенных из готовых устройств, подключенных к прототипу ИС (рис. 12), воплощающему выходные каскады класса D. Мы отмечаем из рис. 11, что THD, определенные из (21), HSPICE и измерения хорошо согласуются, тем самым подтверждая наши аналитические выражения в разделе II-B ранее. Основываясь на этом исследовании, мы рекомендуем выбирать значение между 1,5 и 2,0, и этот диапазон соответствует нашей предыдущей рекомендации. Далее, как и прежде, отметим, что THD увеличивается…
5. С другой стороны, измерения основаны на схемах, построенных из готовых устройств, подключенных к прототипу ИС (рис. 12), воплощающему выходные каскады класса D. Мы отмечаем из рис. 11, что THD, определенные из (21), HSPICE и измерения хорошо согласуются, тем самым подтверждая наши аналитические выражения в разделе II-B ранее. Основываясь на этом исследовании, мы рекомендуем выбирать значение между 1,5 и 2,0, и этот диапазон соответствует нашей предыдущей рекомендации. Далее, как и прежде, отметим, что THD увеличивается…
Контекст 8
… в разделе II-B ранее. Основываясь на этом исследовании, мы рекомендуем выбирать значение между 1,5 и 2,0, и этот диапазон соответствует нашей предыдущей рекомендации. Далее, как и прежде, отметим, что THD увеличивается с увеличением индекса модуляции. Мы разработали прототип ИС, включающий три различных выходных каскада усилителя класса D, изображенных на рис. 12, соотношение конечных транзисторов инвертора (или эквивалентных по сопротивлению) которых отличается, как указано в таблице I.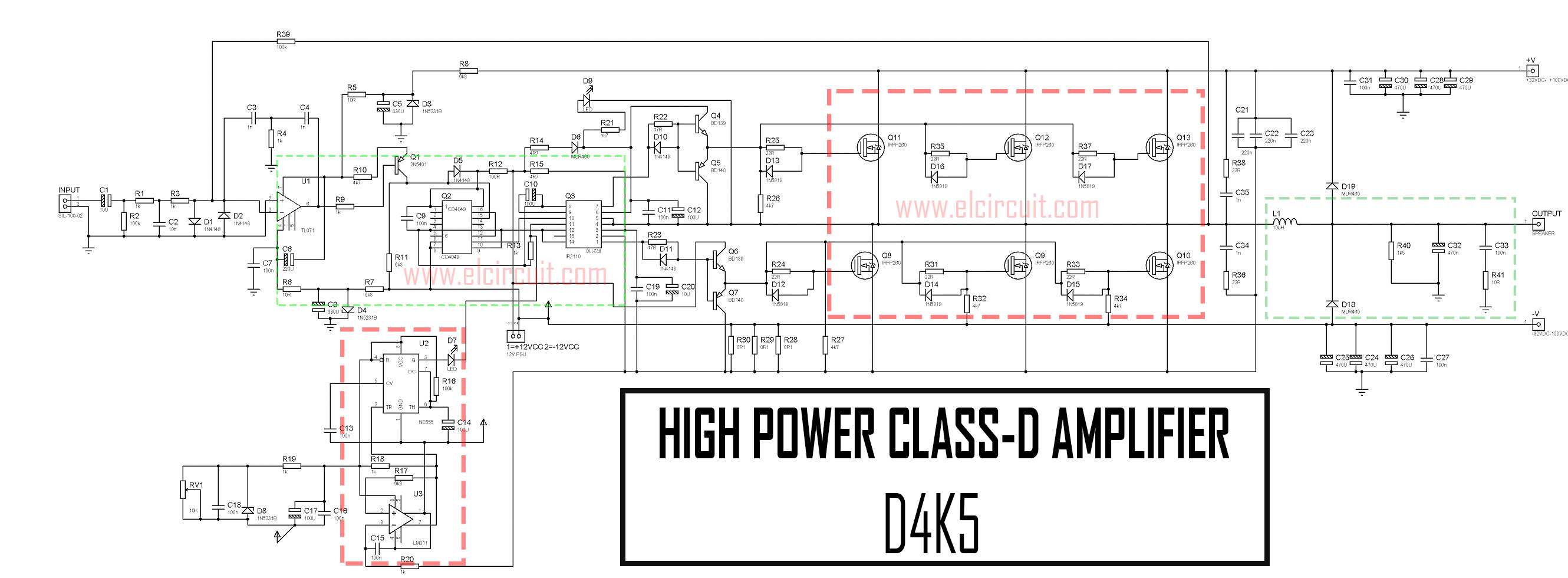 Отметим, что THD во всех случаях невелик. Измеренные THD несколько больше расчетных значений, и это, вероятно, связано с несовершенной треугольной несущей и другими практическими нелинейностями. Of …
Отметим, что THD во всех случаях невелик. Измеренные THD несколько больше расчетных значений, и это, вероятно, связано с несовершенной треугольной несущей и другими практическими нелинейностями. Of …
Усилитель мощности класса D
% PDF-1.6 % 1 0 объект > эндобдж 5 0 obj > эндобдж 2 0 obj > транслировать pdfHarmony 2.0 Linux Kernel 2.6 64bit 13 марта 2012 Библиотека 9.0.11122.13.8.5.14application / pdf
Улучшенные методы коррекции ошибок для безфильтрового цифрового усилителя мощности звука класса D на основе FCLNF
Нацелены на исправление ошибки, вызванной нелинейным шумом и шумом источника питания мостовой нагрузки (BTL) безфильтрового Для цифрового усилителя мощности класса D был предложен метод коррекции ошибок, основанный на методах подавления шума источника питания с прямой связью (FFPSNS) и замкнутой отрицательной обратной связи первого порядка (FCLNF). Этот метод построил контур LCLNF первого порядка для силового каскада и дополнительно снизил влияние шума источника питания на выход усилителя мощности за счет использования технологии FFPSNS, которая одновременно вносит шум источника питания в контур обратной связи. Процесс КМОП 0,35 мкм м используется для анализа и сравнения в Cadence. Результаты моделирования каденции показывают, что PSRR на частоте шума источника питания 200 Гц улучшается на 36,02 дБ. Компоненты, вызванные интермодуляционными искажениями (PS-IMD) источника питания, уменьшаются примерно на 15.57 дБ, а отношение сигнал / шум (SNR) усилителя мощности увеличено на 17 дБ. Общее гармоническое искажение + шум (THD + N ) усилителя мощности снижено до 0,02% с помощью FCLNF + FFPSNS.
Этот метод построил контур LCLNF первого порядка для силового каскада и дополнительно снизил влияние шума источника питания на выход усилителя мощности за счет использования технологии FFPSNS, которая одновременно вносит шум источника питания в контур обратной связи. Процесс КМОП 0,35 мкм м используется для анализа и сравнения в Cadence. Результаты моделирования каденции показывают, что PSRR на частоте шума источника питания 200 Гц улучшается на 36,02 дБ. Компоненты, вызванные интермодуляционными искажениями (PS-IMD) источника питания, уменьшаются примерно на 15.57 дБ, а отношение сигнал / шум (SNR) усилителя мощности увеличено на 17 дБ. Общее гармоническое искажение + шум (THD + N ) усилителя мощности снижено до 0,02% с помощью FCLNF + FFPSNS.
1. Введение
В последние годы страна продвигала высокоэффективные и энергосберегающие технологии и поощряла усиление высокоэффективных и энергосберегающих технологических преобразований и ключевых технологических достижений.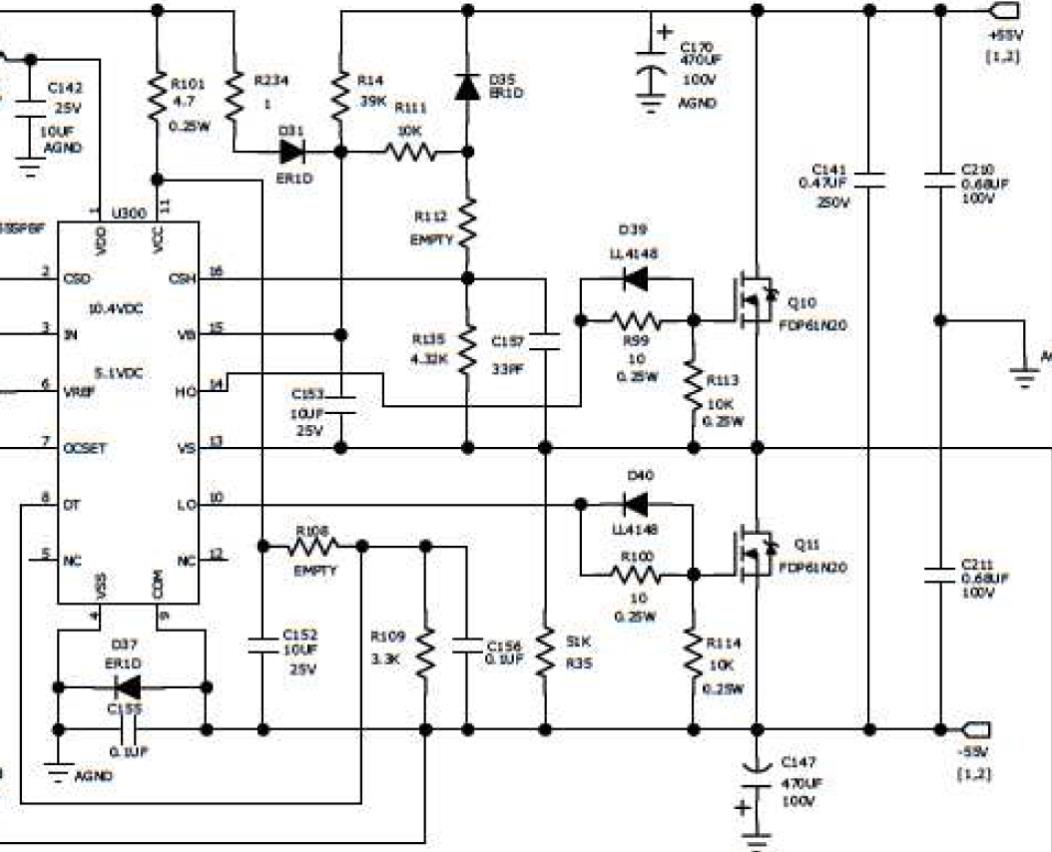 С появлением аудио- и видеооборудования для приложений с низким энергопотреблением цифровые усилители мощности звука класса D без фильтров обладают высокой энергоэффективностью и простым интерфейсом с источниками цифрового звука, что отдают предпочтение исследователям в отрасли [1].И в 11 ключевых технологиях, оцененных IEEE Spectrum за последние десять лет, прогнозируется, что высокоэффективные усилители звука класса D в конечном итоге объединят рынок усилителей звука [2]. Однако собственное неидеальное состояние и шум источника питания могут вызвать серьезные искажения выходного сигнала усилителя мощности.
С появлением аудио- и видеооборудования для приложений с низким энергопотреблением цифровые усилители мощности звука класса D без фильтров обладают высокой энергоэффективностью и простым интерфейсом с источниками цифрового звука, что отдают предпочтение исследователям в отрасли [1].И в 11 ключевых технологиях, оцененных IEEE Spectrum за последние десять лет, прогнозируется, что высокоэффективные усилители звука класса D в конечном итоге объединят рынок усилителей звука [2]. Однако собственное неидеальное состояние и шум источника питания могут вызвать серьезные искажения выходного сигнала усилителя мощности.
Цифровые усилители мощности класса D привлекают все большее внимание из-за их преимуществ высокой энергоэффективности, простоты трансплантации системы и устойчивости к внешним помехам [3].Традиционный цифровой усилитель мощности класса D обычно состоит из цифрового модулятора сигнала переключения, силового каскада и аналогового фильтра нижних частот с индуктивным конденсатором (LC).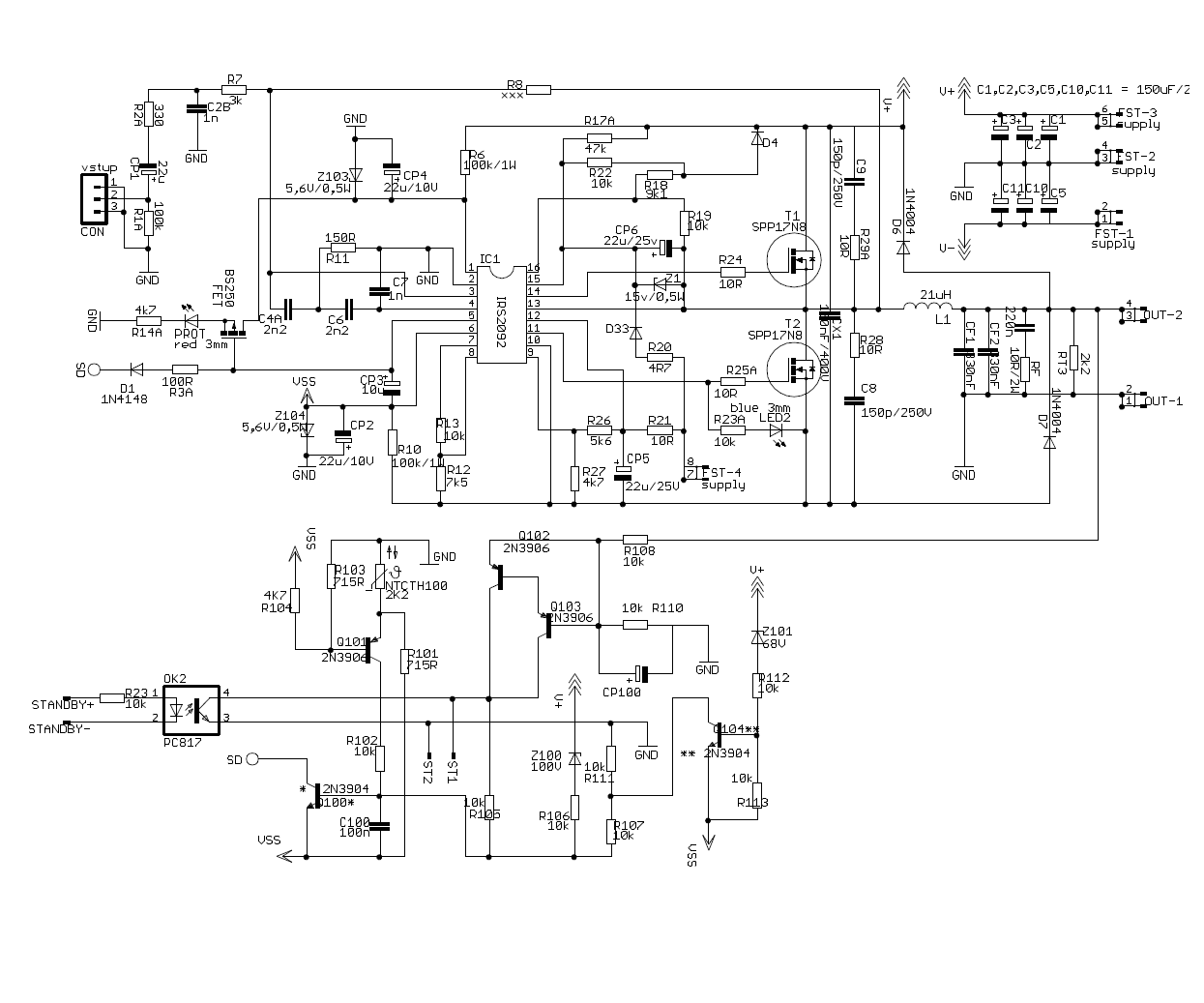 Модулятор цифровых коммутационных сигналов в основном использует реализацию технологии широтно-импульсной модуляции с равномерной выборкой (UPWM). LC-фильтр нижних частот традиционного цифрового усилителя мощности класса D занимает около 75% объема всей системы усилителя мощности и потребляет около 30% стоимости, что серьезно затрудняет портативное применение цифровых усилителей мощности класса D [4 ].Цифровой усилитель мощности класса D без фильтра, являющийся новым типом цифрового усилителя мощности класса D, может заставить громкоговоритель работать без необходимости в LC-фильтре нижних частот с помощью специальной техники модуляции и поддерживать высокую энергоэффективность для соответствия требованиям потребности цифрового звука с развитием миниатюризации оборудования; Цифровой усилитель мощности класса D без фильтров стал горячей точкой исследований в области современных усилителей мощности [5].
Модулятор цифровых коммутационных сигналов в основном использует реализацию технологии широтно-импульсной модуляции с равномерной выборкой (UPWM). LC-фильтр нижних частот традиционного цифрового усилителя мощности класса D занимает около 75% объема всей системы усилителя мощности и потребляет около 30% стоимости, что серьезно затрудняет портативное применение цифровых усилителей мощности класса D [4 ].Цифровой усилитель мощности класса D без фильтра, являющийся новым типом цифрового усилителя мощности класса D, может заставить громкоговоритель работать без необходимости в LC-фильтре нижних частот с помощью специальной техники модуляции и поддерживать высокую энергоэффективность для соответствия требованиям потребности цифрового звука с развитием миниатюризации оборудования; Цифровой усилитель мощности класса D без фильтров стал горячей точкой исследований в области современных усилителей мощности [5].
Для того, чтобы цифровой усилитель мощности звука класса D достиг высокого коэффициента подавления подачи питания (PSRR), интермодуляционных искажений, вызванных источником питания (PS-IMD), отношения сигнал / шум (SNR) и общего гармонического искажения + Шум (THD + N ), два источника больших ошибок должны быть скорректированы на неидеальность и шум источника уровня мощности, вносимый уровнем мощности [6].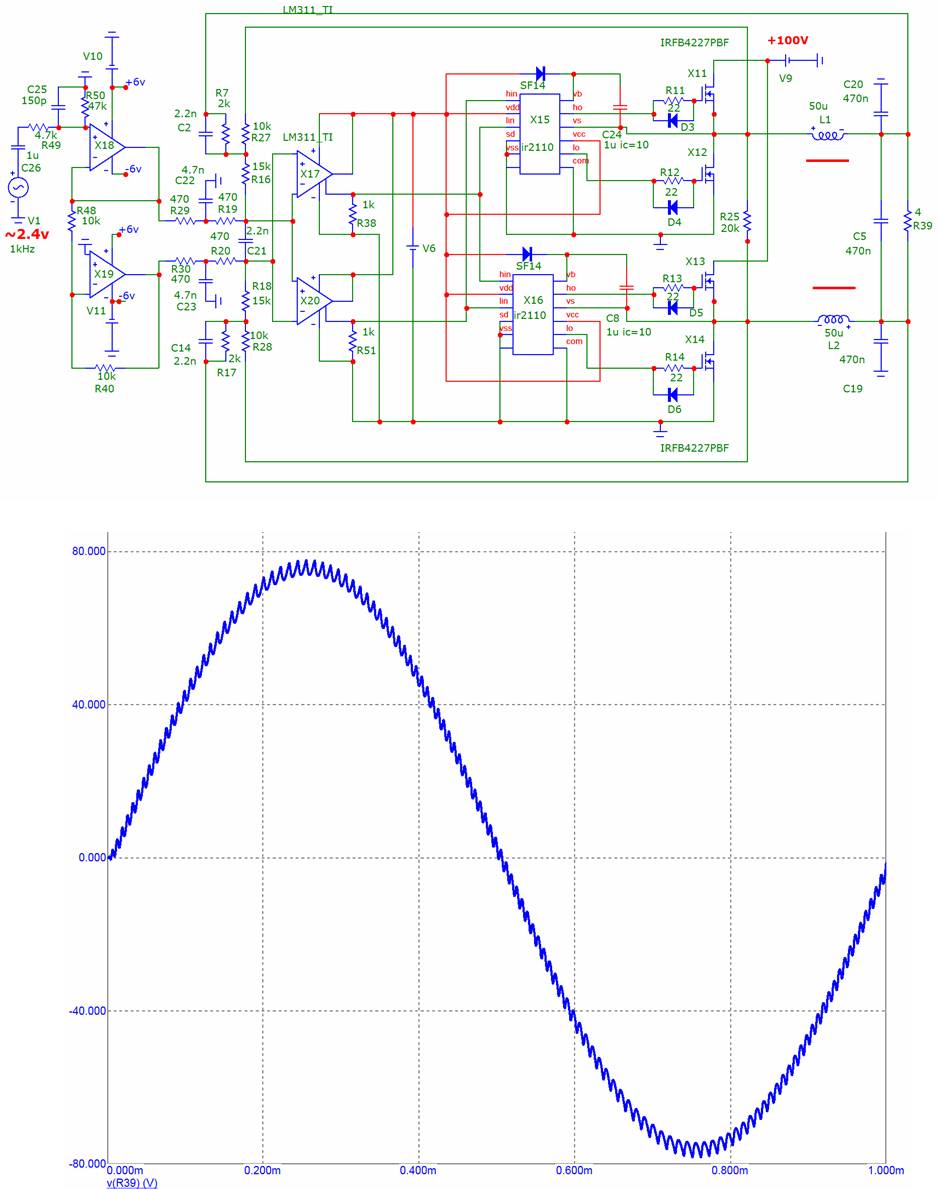
Для цифровых усилителей мощности класса D без фильтров ошибки, вызванные нелинейностью и неидеальными условиями работы силового каскада, особенно ошибки, вызванные шумом источника питания силового каскада, серьезно влияют на выходные характеристики усилителя мощности. [7, 8]. Хотя коэффициент отклонения источника питания усилителя мощности (PSRR) теоретически может достигать бесконечности, когда верхний и нижний полумосты силового каскада с мостовой нагрузкой (BTL) усилителя мощности полностью согласованы, помехи источника питания вызваны шум источника питания.Модуляционные искажения (PS-IMD) по-прежнему велики. В ответ на эту проблему Donida et al. [7] и Mostert et al. [8] подали выходной сигнал усилителя мощности на вход усилителя мощности, установив глобальный замкнутый контур отрицательной обратной связи, включающий в себя модулятор цифрового переключающего сигнала и силовой каскад. Предварительная коррекция выполняется в оконечном или коммутационном модуляторах сигнала для достижения цели коррекции ошибки уровня мощности, но требуется дополнительный аналого-цифровой преобразователь (АЦП), что приводит к значительному увеличению стоимости системы.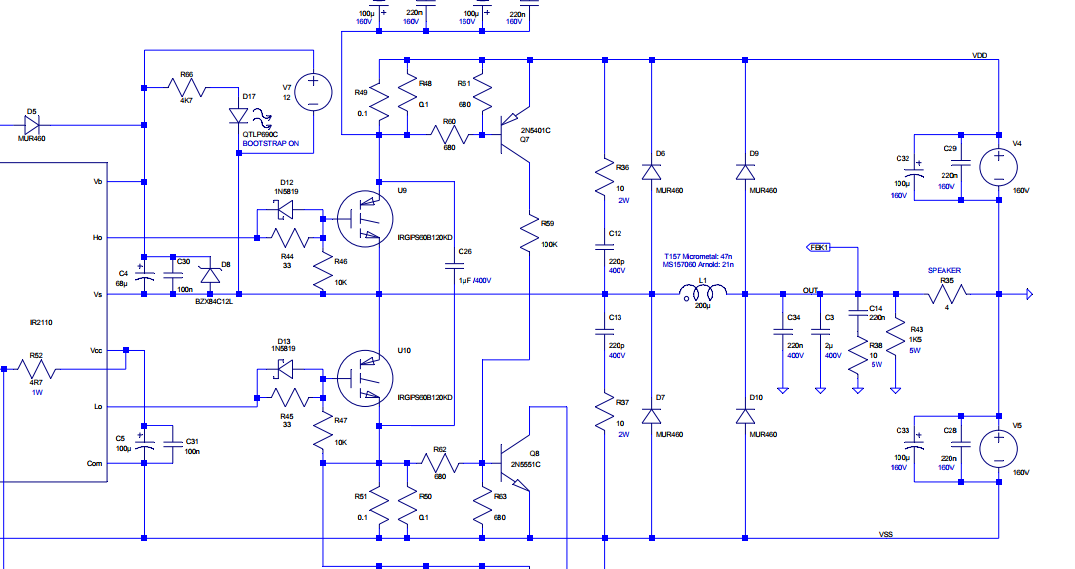 Chen et al. [9] и Cellier et al. [10] построили локальный замкнутый контур отрицательной обратной связи (LCLNF), содержащий только уровень мощности, чтобы исправить ошибку уровня мощности. Этот метод обеспечивает систему. В стабильном состоянии способность подавлять шум источника питания уровня мощности слабая. Таким образом, в настоящее время существует меньше методов коррекции ошибок для силового каскада цифрового усилителя мощности класса D без фильтров, а существующий метод коррекции ошибок силового каскада цифрового усилителя мощности класса D может иметь более высокую стоимость реализации, или силовой каскад ошибка питания.Корректирующая способность слабая.
Chen et al. [9] и Cellier et al. [10] построили локальный замкнутый контур отрицательной обратной связи (LCLNF), содержащий только уровень мощности, чтобы исправить ошибку уровня мощности. Этот метод обеспечивает систему. В стабильном состоянии способность подавлять шум источника питания уровня мощности слабая. Таким образом, в настоящее время существует меньше методов коррекции ошибок для силового каскада цифрового усилителя мощности класса D без фильтров, а существующий метод коррекции ошибок силового каскада цифрового усилителя мощности класса D может иметь более высокую стоимость реализации, или силовой каскад ошибка питания.Корректирующая способность слабая.
Ориентируясь на два вышеупомянутых основных источника ошибок, Донг Джун Ли и Джинхо Но и др. использовали технологию локальной отрицательной обратной связи, чтобы установить модуль подавления шума уровня мощности между модулятором сигнала переключения и уровнем мощности, но это привело бы к увеличению частоты переключения уровня мощности [11, 12].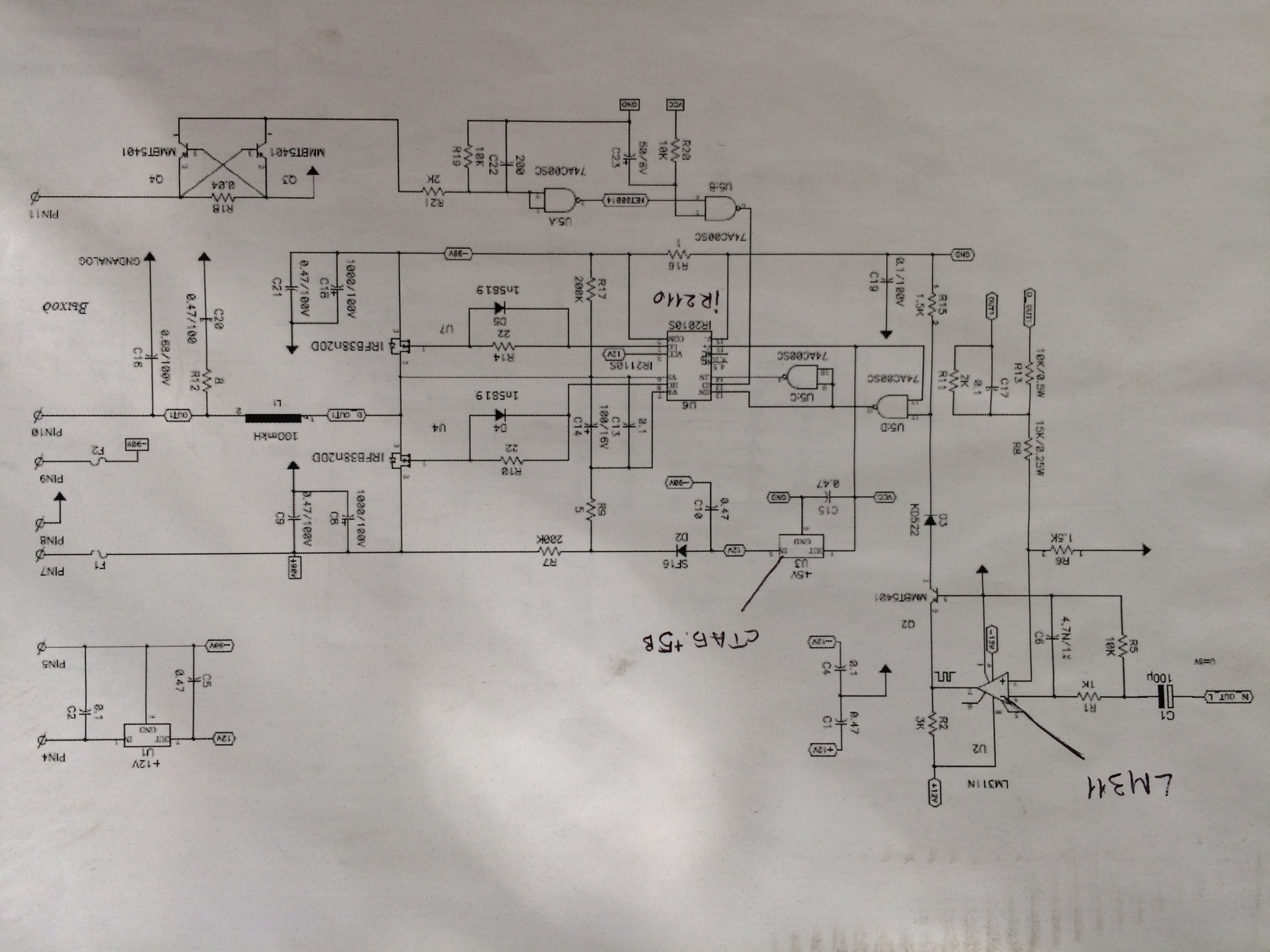 Также используются схемы аналогового контура управления с отрицательной обратной связью и технология предварительной коррекции шума источника питания на уровне мощности [13–15].Схема сложна и требует использования АЦП для преобразования шума источника питания в цифровые сигналы. В [16] предлагается технология шума с прямой связью для аудиоусилителя класса D с односторонней выходной структурой (SE), но этот метод применяется к аудиоусилителю класса D с выходной структурой SE, и система содержит внешнюю LC low -проходной фильтр. В этой статье разрабатывается метод коррекции ошибок с обратной связью первого порядка с обратной связью (FCLNF) для безфильтрового цифрового усилителя мощности аудио класса D с мостовой нагрузкой (BTL) и FCLNF, подходящего для цифрового класса без фильтров. D аудиоусилитель мощности BTL, силовой каскад и метод коррекции ошибок с подавлением шума источника питания с прямой связью (FCLNF + FFPSNS).
Также используются схемы аналогового контура управления с отрицательной обратной связью и технология предварительной коррекции шума источника питания на уровне мощности [13–15].Схема сложна и требует использования АЦП для преобразования шума источника питания в цифровые сигналы. В [16] предлагается технология шума с прямой связью для аудиоусилителя класса D с односторонней выходной структурой (SE), но этот метод применяется к аудиоусилителю класса D с выходной структурой SE, и система содержит внешнюю LC low -проходной фильтр. В этой статье разрабатывается метод коррекции ошибок с обратной связью первого порядка с обратной связью (FCLNF) для безфильтрового цифрового усилителя мощности аудио класса D с мостовой нагрузкой (BTL) и FCLNF, подходящего для цифрового класса без фильтров. D аудиоусилитель мощности BTL, силовой каскад и метод коррекции ошибок с подавлением шума источника питания с прямой связью (FCLNF + FFPSNS).
2. Коррекция ошибок FCLNF + FFPSNS
Силовой каскад класса D является одним из ключевых модулей безфильтрового цифрового усилителя класса D.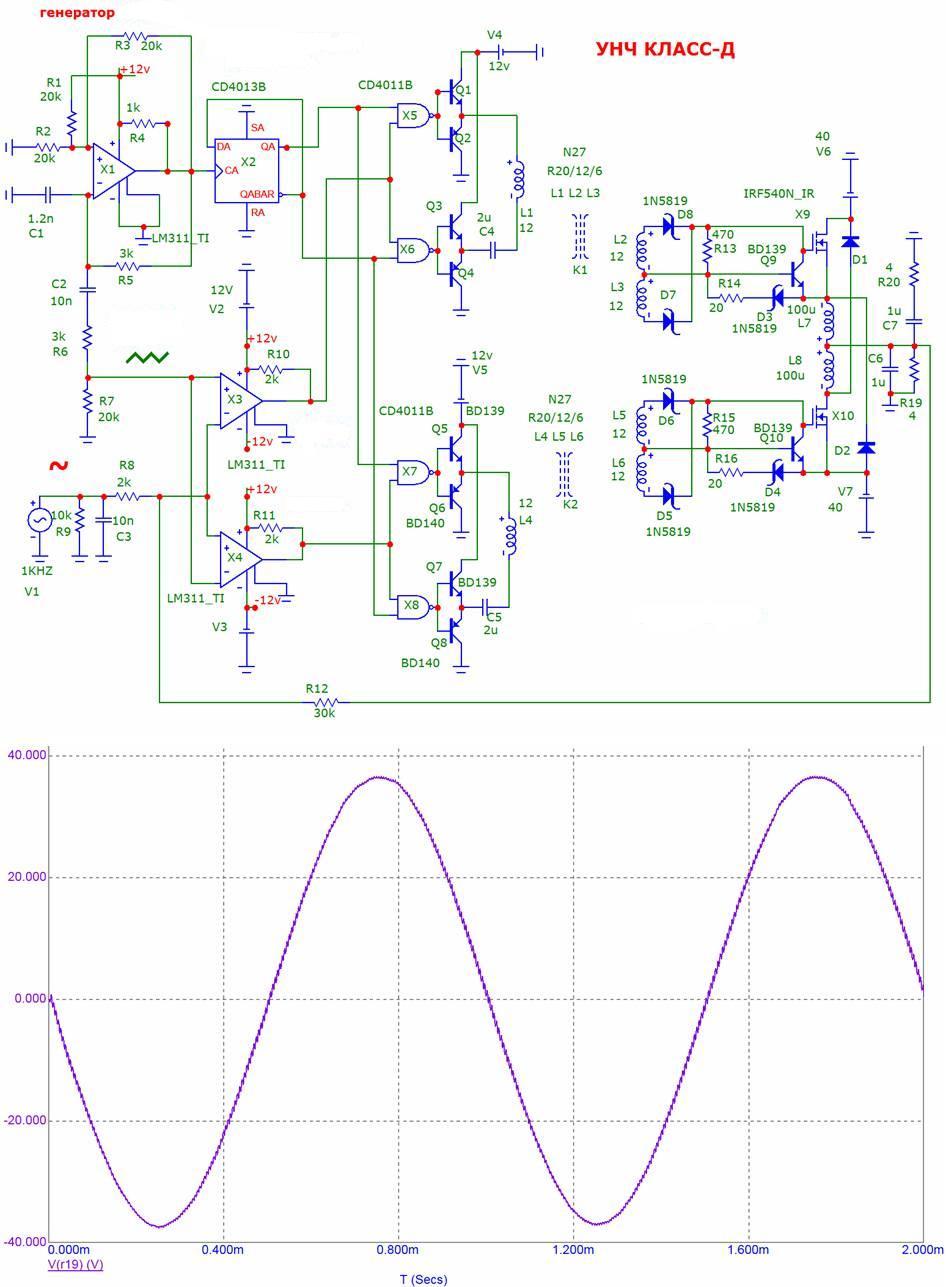 Его функция заключается в усилении слабого сигнала ШИМ для управления динамиком с низким сопротивлением. Его входной и выходной сигнал являются цифровыми сигналами ШИМ. Поскольку пульсационный шум, содержащийся в источнике питания, и неидеальное состояние самого силового каскада влияют на качество выходного сигнала, необходимо выполнить коррекцию ошибок в силовом каскаде без обратной связи.
Его функция заключается в усилении слабого сигнала ШИМ для управления динамиком с низким сопротивлением. Его входной и выходной сигнал являются цифровыми сигналами ШИМ. Поскольку пульсационный шум, содержащийся в источнике питания, и неидеальное состояние самого силового каскада влияют на качество выходного сигнала, необходимо выполнить коррекцию ошибок в силовом каскаде без обратной связи.
Цифровой аудиоусилитель мощности класса D без фильтра в основном состоит из цифрового модулятора UPWM и силового каскада BTL. Первая часть является цифровой, а вторая – аналоговой. Его структура показана на рисунке 1. Из рисунка 1 видно, что цифровой аудиоусилитель мощности класса D без фильтров можно разделить на модулятор UPWM, силовой каскад BTL с разомкнутым контуром и громкоговоритель в целом. Модулятор UPWM представляет собой цифровую схему, а силовой каскад BTL без обратной связи представляет собой аналоговую схему.Модулятор UPWM состоит из цифрового интерполяционного фильтра, синфазного буфера и буфера инвертированного единичного усиления, сигма-дельта модулятора и генератора UPWM.
2.1. Принцип анализа исправления ошибок FCLNF
Схема FCLNF состоит из модуля компенсации, модуля ремодуляции, уровня мощности BTL и некоторых пассивных компонентов [3, 17]. Его схема и эквивалентная модель показаны на рисунке 2. Здесь и представлены входные сигналы, а – синфазное напряжение или опорное напряжение.
и являются передаточными функциями от входного сигнала до инвертирующего входа интегратора. и – коэффициенты усиления интегратора верхнего и нижнего мостов соответственно. и – коэффициенты обратной связи верхнего и нижнего мостов соответственно. и – объединенное линейное усиление уровня мощности и модуля ремодуляции.
В идеальных условиях, если отклонение между двумя путями обратной связи составляет.
Фактор рассогласования между сопротивлениями равен, фактор рассогласования между конденсаторами равен и эквивалентен
. PSRR усилителя мощности с использованием метода FCLNF составляет
2.2. Принцип анализа исправления ошибок FCLNF + FFPSNS
FFPSNS подает шум источника питания силового каскада на внешний модуль силового каскада для предварительной коррекции с помощью определенных средств.
Входные сигналы верхнего и нижнего полумостов порта питания в усилителе мощности находятся соответственно. – синфазное напряжение или опорное напряжение. сопротивление обратной связи. и – выходные сигналы интегратора. и – выходные сигналы модуля FFPSNS. ,,, и,,, имеют одинаковый физический смысл и ценность.
и являются передаточными функциями от входного сигнала до инвертирующего входа интегратора. и – коэффициенты усиления интегратора верхнего и нижнего мостов соответственно. и – коэффициенты обратной связи верхнего и нижнего мостов соответственно.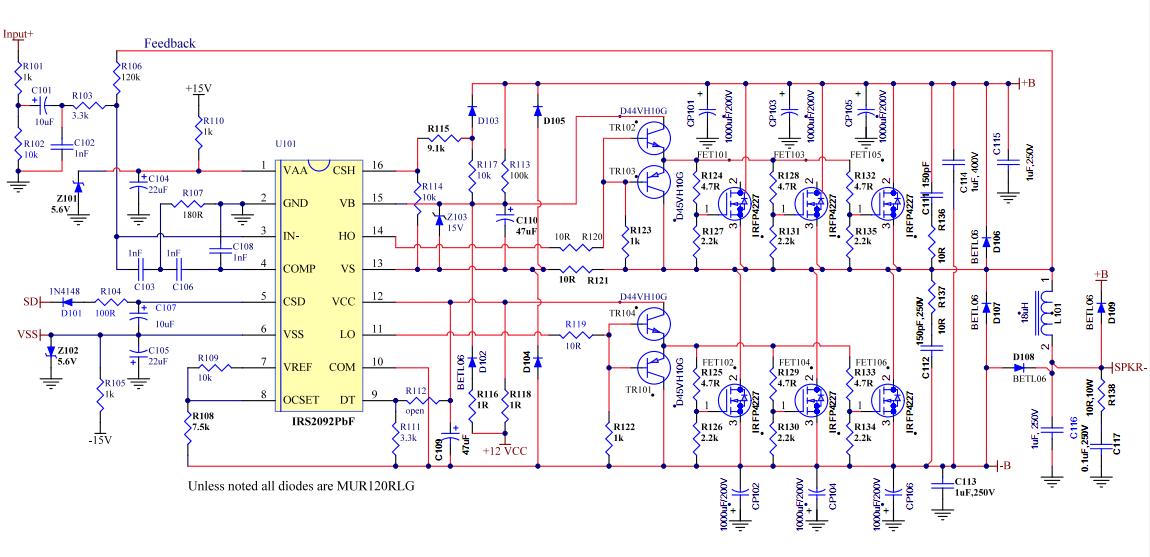 и – объединенное линейное усиление уровня мощности и модуля ремодуляции. – масштабный коэффициент шума источника питания. и являются передаточной функцией прямого канала.
и – объединенное линейное усиление уровня мощности и модуля ремодуляции. – масштабный коэффициент шума источника питания. и являются передаточной функцией прямого канала.
В идеальных условиях,,, и если отклонение между двумя путями обратной связи составляет.
Расхождение между теорией и реальной ситуацией составляет. Коэффициент рассогласования между сопротивлениями равен, коэффициент рассогласования между конденсаторами равен и эквивалентен.
PSRR усилителя мощности, использующего метод FCLNF + FFPSNS, составляет
2.3. Схема усовершенствованного метода коррекции ошибок
Складной каскодный двухкаскадный компенсирующий операционный усилитель Миллера с двойным входом и одним выходом, используемый в этой статье, показан на рисунке 4.
На основе предложенного метода коррекции ошибок силового каскада, Реализована схемная реализация безфильтрового цифрового усилителя мощности класса D BTL силового каскада с коррекцией ошибок.Из рисунка 1 видно, что операционный усилитель и компаратор напряжения являются ключевыми модулями для этого метода. В операционном усилителе используется двухступенчатая каскодная двухкаскадная архитектура компенсации Миллера с двойным входом и одним выходом, как показано на рисунке 4. На рисунке показано напряжение источника питания; ,,, – напряжения смещения операционного усилителя; – выходной сигнал операционного усилителя; и – входные сигналы операционного усилителя; – конденсатор компенсации Миллера; и сопротивление есть.При параллельном подключении для повышения стабильности операционного усилителя ширина полосы единичного усиления и запас по фазе операционного усилителя составляют 13 МГц и 70,3 ° соответственно, а коэффициент усиления без обратной связи составляет 109,9 дБ, а PSRR на 100 Гц составляет 95 дБ. В операционном усилителе с прямой связью также используется архитектура, показанная на рисунке 4, с полосой пропускания с единичным усилением и запасом по фазе 10 МГц и 68 ° соответственно.
Схема компаратора напряжения относительно проста, и его схема показана на рисунке 5.На рисунке, и – входные сигналы компаратора напряжения, а – выходной сигнал компаратора напряжения. В компараторе используется двухступенчатая архитектура усиления. Первый каскад усиления использует структуру схемы дифференциального усилителя и дифференциальную схему для подавления синфазных помех. Усиление второго каскада использует каскодную схему для точного управления напряжением смещения. Выходной каскад использует двухтактный выход для увеличения управляющей способности выхода, в то время как добавление инвертора к выходному каскаду может увеличить время отклика компаратора.После моделирования выходной сигнал компаратора имеет время нарастания 560 пс и время спада 720 пс.
2.4. Моделирование и анализ результатов
Чтобы проверить эффект коррекции ошибок вышеупомянутой схемы, маршрут эксперимента по моделированию, принятый в этой статье, показан на рисунке 6. Экспериментальное моделирование в этой статье основано на Matlab и Cadence. В частности, Matlab используется для генерации двух источников сигнала ШИМ, необходимых для моделирования каденции, а данные сигнала, экспортируемые Matlab, сохраняются как.dat файл. В Cadence, модуль V source используется для хранения данных формы сигнала в виде pwl в Cadence и использования их в качестве сигнала для источника моделирования Cadence. Схема управления FCLNF, содержащая уровень мощности BTL, была построена на платформе Cadence, а затем симулятор Cadence Spectre был использован для моделирования переходных процессов в системе. Наконец, после выборки в Cadence, импортируйте файл .csv в Matlab для анализа спектра и расчета производительности.
На этой схеме ASMC 0.35 μ m CMOS-процесс принят для разработки и создания схемы на платформе Cadence. Условия моделирования: угол процесса mos_tt и температура 27 ° C. Схема управления FCLNF работает при напряжении источника питания 5 В постоянного тока, то есть 5 В, в то время как силовой каскад BTL работает при напряжении источника питания 10 В постоянного тока. VCM составляет половину рабочего напряжения цепи управления с отрицательной обратной связью, а в качестве нагрузки RL силового каскада BTL используется резистор 8 Ом. Входным сигналом усилителя мощности является 24-битный синусоидальный одночастотный цифровой сигнал (частота 1 кГц и амплитуда –5 дБ).Данные формы волны UPWM, сгенерированные Matlab, вводятся в схему моделирования через компонент в Cadence. Время моделирования переходного процесса составляет 42,7 мс. Форма выходного сигнала моделирования дискретизируется и экспортируется с интервалом 40,69 нс (частота дискретизации 24,6 МГц). Результат моделирования показан на рисунке 7.
На рисунке 7 после коррекции FCLNF PSRR усилителя мощности на частоте шума источника питания 200 Гц был равен 82,8 дБ, а PSRR увеличился на 36,02 дБ. PS-IMD усилителя мощности приблизительно равно -80.63 дБ, уменьшившись на 34,73 дБ. SNR был увеличен до 85,7 дБ, а характеристики SNR были намного выше, чем у выходного сигнала нескорректированной схемы (58,59 дБ), который улучшился на 27,11 дБ. Выходные THD + N характеристики усилителя мощности были снижены до 0,0356%, что намного меньше, чем выходные THD + N (0,464%) усилителя мощности без схемы коррекции. На рисунке показано, что PSRR усилителя мощности с коррекцией FCLNF + FFPSNS на частоте шума мощности 200 Гц составляет 84.3 дБ, что близко к показателям PSRR в FCLNF.
Влияние амплитуды шума источника мощности на характеристики усилителя мощности PSRR и PS-IMD показано на рисунках 8 и 9.
Амплитуда шума источника питания увеличилась с -90 дБ до -20 дБ. Независимо от того, откалиброван он или нет, PSRR усилителя мощности остался в основном неизменным с увеличением амплитуды шума источника питания, а PSRR, скорректированный FCLNF и FCLNF + FFPSNS, значительно выше, чем у нескорректированного.Характеристики PSRR двух схем коррекции в основном совпадают.
PS-IMD усилителя мощности не изменяется в зависимости от амплитуды шума источника питания. После коррекции FCLNF и коррекции FCLNF + FFPSNS, когда амплитуда шума источника питания мала (<-70 дБ), PS-IMD в основном не изменяется. Это связано с фоновым шумом в спектре выходного сигнала. Амплитуда интермодуляционных составляющих, создаваемых шумом источника питания и входным сигналом, в основном такая же, как амплитуда фонового шума.Однако по мере того, как амплитуда шума источника питания продолжает увеличиваться, PS-IMD усилителя мощности начинает увеличиваться, а характеристики PS-IMD ухудшаются. Это происходит из-за интермодуляционной составляющей, создаваемой шумом источника питания, и входной сигнал выше, чем фоновый шум, когда амплитуда шума источника питания увеличивается до определенной степени, а характеристики PS-IMD двух схем коррекции в основном эквивалентны.
На рисунке 10 сравниваются изменения PSRR усилителя мощности с частотой шума источника питания при использовании трех решений.Из рисунка 6 видно, что, вне зависимости от того, скорректировано оно или нет, PSRR усилителя мощности не изменится резко по мере увеличения частоты шума источника питания силового каскада, а PSRR усилителя мощности после коррекции с помощью LCLNF + FFPSNS и LCLNF значительно выше, чем PSRR нескорректированного усилителя мощности.
На рисунке 11 сравниваются изменения PS-IMD усилителя мощности с частотой шума источника питания при использовании трех схем.По мере увеличения частоты шума источника питания PS-IMD нескорректированного усилителя мощности становится относительно большим и в основном остается неизменным, в то время как PS-IMD усилителя мощности после коррекции с использованием LCLNF и LCLNF + FFPSNS медленно изменяется на низких частотах (<1000 Гц). На высоких частотах (> 1000 Гц) PS-IMD значительно увеличивается, что вызвано ограниченным произведением полосы усиления операционного усилителя в схеме коррекции, но PS-IMD меньше нескорректированного.В то же время PS-IMD усилителя мощности после коррекции LCLNF + FFPSNS значительно меньше, чем схема коррекции LCLNF.
Таким образом, PSRR усилителя мощности после коррекции с помощью LCLNF и LCLNF + FFPSNS в основном не зависит от амплитуды и частоты шума источника питания силового каскада. При изменении амплитуды и частоты шума источника питания силового каскада PS-IMD усилителя мощности после коррекции LCLNF + FFPSNS значительно ниже, чем после коррекции LCLNF.В то же время амплитуда шума блока питания силового каскада оказывает более значительное влияние на PS-IMD усилителя мощности, чем частота шума блока питания.
В одинаковых экспериментальных условиях были сравнены и проанализированы две схемы коррекции. Результаты показывают, что по сравнению с нескорректированным уровнем мощности производительность PSRR на частоте шума источника 200 Гц улучшается на 36,02 дБ после коррекции FCLNF. Составляющая PS-IMD уменьшилась примерно на 34.73 дБ. Характеристики SNR улучшились на 27,11 дБ, а THD + N значительно снизился. По сравнению с использованием только схемы исправления ошибок FCLNF, характеристики усилителя мощности, использующего схему исправления ошибок FCLNF + FFPSNS, сопоставимы при частоте шума источника питания 200 Гц. Однако PS-IMD усилителя мощности снизился на 15,57 дБ. SNR был дополнительно улучшен на 17 дБ, а THD + N упал до 0,02%.
Доступность данных
Все данные о результатах, использованные для подтверждения выводов этого исследования, можно получить у соответствующего автора по запросу.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Благодарности
Эта работа была поддержана Key Problems in Science and Technology провинции Henan (172102310671), Anyang Science and Technology Project и Anyang Institute of Technology Cultivation Project (YPY2019004), а также Key Discipline Project Министерства образования Хэнань (2018 [ №: 119]).
Конструкция усилителякласса D и компоновка печатной платы | Блоги
Захария Петерсон| & nbsp Создано: 13 ноября 2020 г.
Усилителимогут быть всех форм и размеров, в зависимости от их полосы пропускания, энергопотребления и многих других факторов.Конструкция усилителя класса D обычно используется с аудиосистемами высокого качества, а схемы усилителя класса D не так уж сложно построить в виде схемы. Если вы никогда не работали с усилителем класса D или ищете интересный аудиопроект, следуйте инструкциям по этой компоновке печатной платы.
Простой прототип усилителя класса D
Плата, которую я представлю здесь, имеет более сложную схему, чем макет, но это то, что вы можете создать на основе другой проверенной конструкции.Центральным компонентом этой платы является безиндукторный аудиоусилитель TPA3138D2 класса D. Схема, которую я покажу, аналогична модулю коммутации для этого компонента, но некоторые отличия помогут обеспечить подавление шума и электромагнитную совместимость. Кроме того, гнезда с банановыми зажимами на коммутационной плате были заменены стандартными аудиоразъемами 3,5 мм.
Схема
Эта схема содержит множество компонентов, сгруппированных вокруг одной ИС, как показано на рис. 1 ниже. В этом типе компоновки можно дождаться завершения схемы, прежде чем назначать позиционные обозначения; Таким образом, на схеме под компонентами видны красные полосы ошибок.Просто игнорируйте их, пока они исчезнут после того, как вы назначите уникальные обозначения.
Рис. 1. Схема усилителя класса D мощностью 10 ВтВыбор детали
Помимо основного стерео усилителя динамика класса D TPA3138D2, не так много специальных шагов, которые необходимо выполнить, прежде чем мы сможем перейти к разводке печатной платы. Первое, что нам нужно сделать, это взять компонент TPA3138D2 из панели поиска деталей производителя. Отсюда мы можем разместить его прямо на пустой схеме и начать добавлять другие пассивы в устройство.
Рисунок 2. Обнаружение TPA3138D2 на панели «Поиск деталей производителя» в Altium Designer.Следует выбрать другие пассивные элементы, чтобы обеспечить соответствующую выходную мощность (резисторы) и напряжение с соответствующей емкостью. Поскольку нас не беспокоят очень высокие частоты в этом усилителе, мы можем использовать электролитические конденсаторы.
Обозначения
Что касается назначения позиционных обозначений, вам следует попытаться организовать их, особенно если вы будете использовать несколько листов в своем проекте.Я начинал назначать позиционные обозначения в верхнем левом углу схемы и продвигался по диагонали по листу. Вы также можете заменить разъемы на некоторые порты, указывающие на другие листы, если хотите использовать эту схему в более обширной системе.
Дифференциальный выход
Если вы внимательно посмотрите на схему, вы заметите, что левый и правый выходы представляют собой дифференциальные пары. Здесь я мог бы разместить директиву дифференциальной пары, если бы нам нужно было применить большое количество правил проектирования к нескольким дифференциальным сигналам.Я оставил это здесь, так как нас не беспокоит маршрутизация с контролем импеданса. Нам нужно только обеспечить согласование длины этих сигналов, что достаточно легко сделать на макете печатной платы.
Мощность
Обратите внимание, что я не размещал на этой плате регулирование мощности. Тем не менее, вы, безусловно, можете добавить к схемам регулятор мощности, если он может обеспечивать максимальную выходную мощность до 18,5 Вт, как указано в таблице данных TPA3138D2. Вы можете добавить простой регулятор мощности в другую схему и импортировать его на плату, чтобы обеспечить питание 5 В.На этой плате я добавлю мощность через контактный заголовок, чтобы упростить задачу.
Схема расположения печатной платы
Хотя схема выглядит немного перегруженной, основным компонентом, который необходимо размещать и тщательно разводить, является TPA3138D2, а также трассы, проложенные к нашим входным / выходным разъемам. Перед тем, как приступить к разводке, есть несколько важных правил электромагнитной совместимости, которые мы хотели бы соблюдать, чтобы предотвратить вывод низкоуровневого шума на динамики, подключенные к этой плате.
Поскольку мы не имеем дело с чрезвычайно высокими скоростями (только с полосой пропускания до ~ 1 МГц для медленных сигналов ШИМ), мы должны следовать некоторым стандартным рекомендациям по PI, EMI и EMC при планировании разводки печатной платы.
- Power : используйте сплошную заземляющую пластину на внутреннем слое и держите плоскости подальше от краев печатной платы. Для этой платы вы можете использовать силовой самолет, но мы не работаем с очень большим током, поэтому в этом нет необходимости. Вместо этого я буду использовать толстые дорожки для разводки мощности от разъема питания к компонентам и для разводки от выхода усилителя к разъемам динамиков.
- Маршрутизация : Следите за тем, чтобы выходы усилителя до динамика были как можно короче. Эти следы и провода громкоговорителей будут крупнейшими источниками излучаемых электромагнитных помех.
- Caps : В этом типе низкоскоростной конструкции обычной рекомендацией является использование конденсаторов 1 нФ с низким ESR рядом с микросхемой TPA3138D2, чтобы гасить колебания земли и минимизировать паразитную индуктивность. Есть два больших конденсатора (0,1 мФ / 50 В) на входе контактов PVCC в верхней левой части микросхемы TPA3138D2 (см. , рис. 1, ).Радиальные конденсаторы можно использовать, чтобы они занимали мало места на плате. Для среднечастотного шума, вызванного ШИМ-сигналом и его переходными процессами, вы также можете использовать конденсатор 0,1 мкФ, расположенный как можно ближе к выводам PVCC.
- Parasitics : Здесь мы больше всего беспокоимся о том, чтобы индуктивность контура оставалась небольшой для критических трасс. Это еще одна причина использовать сплошное заземление и разместить выход динамика рядом с усилителем.
- Радиатор : При 4 или 8 Ом (стандартное сопротивление динамика) и номинальной выходной мощности вам может потребоваться стратегия охлаждения.Наличие заземляющего слоя под модулем помогает, но TPA3138D2 достаточно большой, чтобы на нем можно было разместить небольшой радиатор.
На рис. 3 ниже показан готовый макет в 3D (для доступа к нему нажмите «3» на клавиатуре при открытом редакторе плат). Стратегия, которую я использовал, заключается в размещении выходных разъемов у края платы и обратном направлении к порту питания. После размещения выходных разъемов я разместил усилитель TPA3138D2, проложил дорожки между выходами усилителя и динамика и разместил оставшиеся пассивные элементы вокруг них.Наконец, я сохранил разъем питания в нижней левой части платы. Если вы хотите установить на плате импульсный регулятор, это будет хорошим местом для него, поскольку он находится далеко от дорожек аудиовыхода.
Рис. 3. Готовое расположение компонентов в 3D.На рис. 4 вы найдете двухмерную компоновку печатной платы. Эта плата была спроектирована на двух уровнях и состояла из нескольких многоугольников для обеспечения питания секции усилителя. На этой плате проще всего провести толстые дорожки к выходам громкоговорителей, используя полигональную заливку.Нижний слой содержит сплошную заземляющую пластину, а в компоновке размещено несколько перегородок, чтобы обеспечить небольшую изоляцию между левой и правой сторонами платы. Вы заметите, что верхний слой также залит землей, чтобы обеспечить экранирование входных аудиосигналов.
Рис. 4. Схема печатной платы для нашей конструкции усилителя класса D.Следует отметить большие области медного заполнения, ведущие к выходным разъемам. Этих дорожек немного излишне для этой платы, но плата будет нести большую мощность, поэтому можно выбрать более объемные дорожки, чтобы поддерживать низкую температуру.Напротив, следы на входной стороне намного меньше, поскольку мы предполагаем, что входной сигнал будет довольно низким уровнем.
Если вас устраивает конструкция и компоновка усилителя класса D, вы можете использовать производственные функции в Altium Designer®, чтобы подготовить плату к изготовлению и сборке. Вы также можете поделиться своей новой платой со своими коллегами или производителем на Altium 365®. Мы только прикоснулись к тому, что можно делать с Altium Designer на Altium 365.Вы можете проверить страницу продукта для более подробного описания функций или на одном из веб-семинаров по запросу.
Плата дифференциального усилителя, цифровой усилитель AB 2×18 Вт Плата усилителя класса D Класс AB Напряжение усилителя мощности звука DC6-14V Цепь усилителя мощности звука: Электроника
- Убедитесь, что это подходит введя номер вашей модели.
- Дифференциальная схема использует симметрию параметров схемы и эффективно стабилизирует статическую рабочую точку, а также усиливает сигнал дифференциального режима для подавления синфазного сигнала. Он широко используется во входном каскаде цепи прямой связи и измерительной цепи.
- Использование шагов: убедитесь, что режим работы; Подключите подходящие колонки; Подключите правое входное напряжение к входной клемме; Входной аудиосигнал; Протестируйте и используйте.
- Особенности: Поддержка двойного рабочего модуля; Качественный звук; Поддержка двойного выхода; Поддержка защиты от высоких температур.
- 7 Вт (класс D, 7,4 В, 4 Ом, THD = 10%), 10 Вт (класс D, 9 В, 4 Ом, THD = 10%), 18 Вт (класс D, 12 В, 4 Ом, THD = 10%)
Усилители класса D
Усилители класса D| Elliott Sound Products | Усилители класса D |
© 2005, Серхио Санчес Морено (ColdAmp)
Отредактированный и дополнительный текст и рисунки Рода Эллиотта (ESP)
Страница создана 4 июня 2005 г.
Основной индекс Указатель статей
Содержание
1 – Введение
В течение последних 15-20 лет развивалась совершенно новая технология усиления звука, которая имеет явное преимущество перед широко распространенными в настоящее время топологиями класса A и AB.Речь идет о так называемом «классе D». Это преимущество в основном заключается в его высокой энергоэффективности. На рисунке 1 показаны типичные кривые КПД в зависимости от выходной мощности для конструкций класса B и класса D.
Теоретическая максимальная эффективность конструкций класса D составляет 100%, а на практике можно достичь более 90%. Обратите внимание, что эта эффективность высока от очень умеренных уровней мощности до ограничения, тогда как максимум 78% в классе B достигается в начале ограничения. При практическом использовании с музыкальными сигналами достигается КПД менее 50%.Высокая энергоэффективность ШИМ-усилителя означает меньшее энергопотребление при заданной выходной мощности, но, что более важно, резко снижает требования к радиатору. Любой, кто строил или видел мощные аудиоусилители, заметил, что большие алюминиевые профили необходимы для того, чтобы электроника оставалась относительно прохладной. Нагрузка на силовой трансформатор также значительно снижается, что позволяет использовать трансформатор меньшего размера для той же выходной мощности.
Рисунок 1 – Сравнение эффективности для классов D и AB
Эти радиаторы составляют важную часть веса, стоимости и размеров оборудования.По мере того, как мы углубимся в детали этой топологии, мы заметим, что хорошо работающий (низкий уровень искажений, полный диапазон) усилитель класса D должен работать на довольно высоких частотах, в диапазоне от 100 кГц до 1 МГц, требуя очень высокой скорости мощности и сигнала. устройств. Исторически это относилось к этому классу, где не требуется полная полоса пропускания и допустимы более высокие уровни искажений, то есть сабвуфер и промышленное использование.
Однако это изменилось, и благодаря современным более быстрым переключателям, знаниям и использованию передовых методов обратной связи стало возможным проектировать усилители класса D с очень хорошими характеристиками, охватывающими весь звуковой диапазон.Они обладают высокими уровнями мощности, небольшими размерами и низкими искажениями, сравнимыми с хорошими конструкциями класса AB. (С этого момента я буду называть топологии класса A и AB «классическими»).
Полный модуль усилителя полного диапазона класса D мощностью 400 Вт (любезно предоставлен ColdAmp)
С точки зрения «сделай сам» класс D довольно неудачный. Из-за чрезвычайно высокой скорости переключения важна компактная компоновка, а SMD (устройства для поверхностного монтажа) необходимы для получения необходимой производительности.Паразитная емкость и индуктивность обычных компонентов со сквозным отверстием таковы, что практически невозможно сделать усилитель ШИМ, используя эти детали. Действительно, подавляющее большинство всех микросхем, используемых для этого приложения, доступны только и для поверхностного монтажа, и если взглянуть на любой усилитель ШИМ, можно увидеть, что обычные компоненты практически не используются где-либо на плате. Поскольку детали SMD очень сложно собрать вручную, а конструкция печатной платы настолько важна для конечной производительности, DIY-версии усилителей PWM действительно очень редки (я не знаю ни одного).
2 – Как работает класс D
В классических усилителях по крайней мере одно из выходных устройств (пусть они будут биполярными транзисторами, полевыми МОП-транзисторами или лампами) в любой момент времени является проводящим. Пока проблем нет, но они также несут заданный ток при падении напряжения между коллектор-эмиттер / сток-исток и т. Д. Поскольку P = V × I, они рассеивают мощность, и даже если нет выхода, небольшой Через транзисторы должен проходить ток, чтобы избежать перекрестных искажений, поэтому присутствует некоторая диссипация.По мере увеличения выходного напряжения для данных шин питания падение напряжения на транзисторах будет падать, но ток увеличивается. При насыщении (клиппинге) VCE или VDS будут низкими, но ток будет довольно высоким (Vout / Rspk). И наоборот, при низких уровнях мощности ток небольшой, но падение напряжения велико. Это приводит к кривой рассеяния мощности, которая не зависит от выходной мощности. Существует ненулевое минимальное рассеивание (нулевой КПД) и точка, в которой достигается максимальная эффективность… около 78% для чистых конструкций класса B, 25% или менее для класса A.
С другой стороны,Class-D основывает свою работу на переключении выходных устройств между двумя состояниями, а именно «включено» и «выключено». Прежде чем обсуждать конкретные детали топологии, мы можем сказать, что во включенном состоянии через устройство протекает заданное количество тока, в то время как теоретически напряжение от стока к истоку отсутствует (да, почти каждый класс D будет использовать полевые МОП-транзисторы). , следовательно, рассеиваемая мощность теоретически равна нулю. В состоянии «выключено» напряжение будет соответствовать общему напряжению шины питания, поскольку оно ведет себя как разомкнутая цепь, и ток не будет течь (это очень близко к реальности).
Но как наш любимый аудиосигнал может быть представлен ужасной прямоугольной волной всего с двумя возможными уровнями? Ну, на самом деле он модулирует некоторые характеристики этого прямоугольного сигнала, так что информация есть. Теперь нам «только» нужно понять, как выполняется модуляция и как восстановить из нее усиленный звуковой сигнал. Наиболее распространенный метод модуляции, используемый в классе D, называется ШИМ (широтно-импульсная модуляция) – создается прямоугольная волна с фиксированной частотой, , но , время, когда она находится в «высоком» и «низком» состояниях, не всегда 50%, но меняется в зависимости от входящего сигнала.Таким образом, когда входной сигнал увеличивается, состояние «высокий» будет присутствовать дольше, чем состояние «низкий», и наоборот, когда сигнал «низкий». Если мы посчитаем, среднее значение сигнала за один цикл будет просто …
V среднее = V высокое × D + V низкое × (1-D), где D = T на / T, (рабочий цикл)
T – период сигнала, т.е. 1 / Fsw (частота переключения).
Например, среднее значение 50% рабочего цикла (оба состояния присутствуют в течение одного и того же промежутка времени) сигнала от + 50 В до -50 В составляет: 50 × 0.5 + (- 50) × 0,5 = 0 В. Фактически, выходной сигнал холостого хода (отсутствие сигнала) усилителя класса D представляет собой прямоугольный сигнал с коэффициентом заполнения 50%, переключающийся с положительной шины на отрицательную.
Если мы модулируем вход до максимума, мы будем иметь рабочий цикл, близкий к 100%. Положим 99%: Vmean = 50 × 0,99 + (-50) × 0,01 = 49 В. И наоборот, если сигнал самый низкий, нам нужно около 0% (давайте использовать 1%), поэтому Vmean = -49V.
PWM обычно генерируется путем сравнения входного сигнала с формой волны треугольника, как показано на рисунке 2.Треугольная волна определяет как входную амплитуду для полной модуляции, так и частоту переключения
.
Рисунок 2 – Генерация базового ШИМ
На рисунке 3 показан типичный сигнал ШИМ, модулированный синусоидальной волной. Обратите внимание, что он разработан таким образом, что сигналы между -1 и 1 В будут давать рабочий цикл от 0% до 100%, 50% соответствуют входному 0 В. «Цифровой» выход использует стандартные логические уровни, где 0 В – это логический «0», а 5 В – это логическая «1». Из-за такой оцифровки сигнала усилители с ШИМ иногда ошибочно называют цифровыми усилителями.Фактически, весь процесс почти полностью аналоговый, а любая «цифровая» схема является случайной.
Рисунок 3 – Аспект модулированного сигнала ШИМ
Обратите внимание, что для правильного представления сигнала частота опорного сигнала ШИМ должна быть намного выше, чем частота максимальной входной частоты. Следуя теореме Найквиста, нам нужна как минимум вдвое большая частота, но в конструкциях с низким уровнем искажений используются более высокие коэффициенты (обычно от 5 до 50). Затем сигнал ШИМ должен управлять схемой преобразования мощности, чтобы генерировался мощный ШИМ-сигнал, переключаясь с шин питания с положительной на отрицательную (при использовании полумостовой топологии).
Спектр сигнала ШИМ имеет низкочастотную составляющую, которая является копией спектра входных сигналов, но также содержит компоненты на частоте переключения (и ее гармоники), которые следует удалить, чтобы восстановить исходный модулирующий сигнал. Для этого необходим мощный фильтр нижних частот. Обычно используется пассивный LC-фильтр, потому что он (почти) без потерь и имеет небольшое рассеяние или вообще не имеет его. Хотя всегда должны быть какие-то потери, на практике они минимальны.
3 – Топологии
Существует две основные топологии класса D – полумостовая (используются 2 устройства вывода) и полная мостовая (4 устройства вывода). У каждого есть свои преимущества. Например, полумост, очевидно, проще и имеет большую гибкость, поскольку полумостовой усилитель может быть соединен мостом, как в классических топологиях. Если он неправильно спроектирован и управляется, он может страдать от явления “накачки шины” (передачи тока в источник питания, что может привести к увеличению его напряжения, создавая ситуации, опасные для усилителя, источника питания и динамика).
Для полного моста требуются выходные устройства, рассчитанные на половину напряжения, чем у полумостового усилителя той же мощности, но это более сложно. На рисунках 5a и 5b концептуально показаны обе топологии. Очевидно, что многие компоненты, такие как разделительные конденсаторы и т. Д., Не показаны.
Рисунок 4a – Топология полумоста класса D
Рисунок 4b – Топология полного моста класса D
Обратите внимание, что для полного моста ШИМ-усилителя требуется только одна шина питания – биполярные источники питания не нужны, но их все же можно использовать.Когда используется один источник питания, каждый провод динамика будет иметь напряжение ½ Vdd. Поскольку он подключен по-разному, громкоговоритель не видит постоянного тока, если все хорошо сбалансировано. Однако это может (и вызывает) проблемы, если допускается замыкание провода динамика на корпус!
Фильтр может быть реализован с помощью одного конденсатора на громкоговорителе, пары колпачков на землю или, в некоторых случаях, обоих (как показано пунктирными линиями, соединяющими колпачки).
В остальной части документа мы сконцентрируемся на топологиях полумоста, хотя подавляющее большинство идей применимо и к полумостовым схемам.
Конструкция полумоста
Полумостовая схема, изображенная на рисунке 4а, работает следующим образом …
Когда Q1 включен (соответствует положительной части цикла ШИМ), узел переключения (вход индуктора) подключается к Vdd, и через него начинает увеличиваться ток. Основной диод Q2 имеет обратное смещение. Когда Q2 включен (отрицательная часть цикла ШИМ), основной диод Q1 имеет обратное смещение, и ток через Lf начинает уменьшаться. Форма волны тока в Lf имеет треугольную форму.
Очевидно, что только один из транзисторов должен быть включен в любой момент. Если по какой-либо причине оба устройства модернизируются одновременно, между рельсами произойдет эффективное короткое замыкание, что приведет к сильному току и разрушению полевых МОП-транзисторов. Чтобы предотвратить это, необходимо ввести некоторое «мертвое время» (небольшой период, когда оба полевых МОП-транзистора выключены).
Lf вместе с Cf и самим динамиком образуют фильтр нижних частот, который восстанавливает аудиосигнал путем усреднения напряжения коммутационного узла.
Синхронизация имеет решающее значение во всем этом процессе: любая ошибка, такая как задержки или время нарастания полевых МОП-транзисторов, в конечном итоге повлияет на эффективность и качество звука. Все задействованные компоненты должны быть высокоскоростными. Мертвое время также влияет на производительность, и его необходимо минимизировать. В то же время мертвое время должно быть достаточно большим, чтобы гарантировать, что ни при каких обстоятельствах оба полевых МОП-транзистора включены одновременно. Типичные значения от 5 до 100 нс.
Мертвое время является критическим фактором для характеристик искажения.Для минимальных искажений мертвое время должно быть как можно меньше, но это может привести к возникновению «сквозных» токов, когда оба полевых МОП-транзистора включены одновременно. Это не только резко увеличивает искажения и рассеяние, но и быстро разрушает выходные устройства. Если мертвое время слишком велико, реакция выходного каскада больше не соответствует истинному сигналу ШИМ, генерируемому модулятором, поэтому искажения снова увеличиваются. В этом случае на диссипацию не влияет.
4 – Привод ворот
Чтобы обеспечить быстрое время нарастания / спада полевых МОП-транзисторов, драйвер затвора должен обеспечивать достаточно высокий ток для зарядки и разрядки емкости затвора во время интервала переключения.Обычно требуется время нарастания / спада 20–50 нс, что требует тока затвора более 1 А.
Обратите внимание, что на показанных схемах используются оба N-канальных полевых МОП-транзистора. Хотя в некоторых конструкциях используются дополнительные устройства с N- и P-каналами, это является субоптимальным IMO из-за трудности получения подходящих P-устройств и согласованных пар. Так что сконцентрируемся только на N-канальных полумостах. Обратите внимание, что для включения полевого МОП-транзистора между его затвором и истоком должно присутствовать напряжение выше Vth. Источник нижнего полевого МОП-транзистора подключен к -Vss, поэтому его схема управления должна быть отнесена к этому узлу, а не к GND.
Однако управлять верхним полевым МОП-транзистором сложнее, поскольку его источник постоянно находится между + Vdd и -Vss (минус падения из-за сопротивления). Однако его драйвер также должен быть плавающим на коммутационном узле, и, более того, для включенного состояния его напряжение должно быть на несколько вольт выше + Vdd, чтобы при включении Q1 создавалось положительное напряжение Vgs. Это также подразумевает смещение напряжения, чтобы схема модулятора могла правильно взаимодействовать с драйвером.
Это одна из основных трудностей конструкции класса D: привод ворот.Для решения вопроса используется несколько подходов …
- Трансформаторный привод затвора: используется в полумостовых источниках питания, где рабочий цикл не сильно меняется. Однако в аудиоусилителях рабочий цикл составляет от 0% до 100%, поэтому этот метод создает проблему, потому что сигнал связан по переменному току. Требуется схема восстановления постоянного тока (не показана).
- Управление дискретным затвором: в некоторых конструкциях используются транзисторы для переключения уровня и управления полевым МОП-транзистором. Опять же, проблема: нам нужно напряжение выше + Vdd.
- Интегрированные драйверы: на рынке существует ряд драйверов MOSFET, оптимизированных для высокой скорости, которые можно использовать. Опять же, необходимо напряжение выше Vdd, а также сдвиг уровня.
На Рисунке 5 (a, b и c) показаны некоторые возможности для управления воротами с высокой стороны …
| Рисунок 5а – Трансформаторная связь | Рисунок 5b – Дискретный драйвер BJT | Рисунок 5c – Драйвер IC |
Обратите внимание, что в схемах на рисунках 5b и 5c вход ШИМ обозначен как -Vss, поэтому может потребоваться предыдущий сдвиг уровня выхода компаратора, который обычно будет обозначаться как GND.Рис. 5a потребует смещения уровня только инвертированной ШИМ, так как вход трансформатора может быть привязан к GND, как показано. Многие из доступных сейчас микросхем драйверов имеют встроенные переключатели уровня, оптимизированные для скорости. Помните, что любая задержка , внесенная в форму волны переключения, может вызвать искажение или одновременную проводимость полевого МОП-транзистора.
У нас есть еще одна проблема, которую нужно решить … получение 12 В выше VS (коммутационный узел). Мы можем добавить еще один блок питания, изолированный от основного, который (-) подключен к VS.Это решение может оказаться непрактичным, поэтому обычно используются другие методы. Самым распространенным является схема бутстрапа. В методе начальной загрузки используется накачка заряда, состоящая из быстродействующего диода и конденсатора. На выходе усилителя вырабатываются импульсы переключения, необходимые для зарядки конденсатора.
Рис.6 Конденсатор начальной загрузки обеспечивает напряжение питания драйвера высокой стороны
Таким образом, единственный необходимый вспомогательный источник питания – это 12 В относительно -Vss, который используется для питания как драйвера низкого уровня, так и насоса заряда для драйвера высокого уровня.Поскольку средний ток от этого источника питания невелик (хотя во время событий переключения бывают сильные пики заряда, они длятся всего 20-50 нс, дважды за цикл, поэтому среднее значение довольно низкое, в диапазоне 50-80 мА), это питание легко получить от отрицательной шины с помощью простого регулятора 12 В (конечно, обращая внимание на максимальное входное напряжение).
5 – смещение уровня
Как видно из предыдущих рисунков, для возбуждения драйвера MOSFET сигнал ШИМ должен быть отнесен к -Vss.Таким образом, поскольку модулятор обычно работает от +/- 5 до +/- 12 В, обычно требуется функция сдвига уровня. Можно выбрать сдвиг уровня сигнала ШИМ и затем сгенерировать инвертированную версию или сгенерировать оба выхода и инвертировать их оба. Это зависит, например, от типа используемого компаратора (если доступны дополнительные выходы, решение принимается).
Базовая функция сдвига уровня может быть выполнена с помощью одно- или двухтранзисторной схемы, подобной схеме, изображенной на рисунке 6 (перед драйвером на стороне высокого напряжения).Хотя это может работать на низких частотах, важно смоделировать поведение компаратора и устройства сдвига уровня, поскольку они могут привести к значительным задержкам и ошибкам синхронизации, если они неправильно спроектированы.
Справедливо будет сказать, что переключатель уровня является одной из наиболее важных частей схемы, о чем свидетельствует большое количество конкурирующих микросхем, разработанных для этой работы. У каждого будут свои преимущества и недостатки, но во всех случаях сложность намного выше, чем можно предположить из упрощенных диаграмм.
6 – Конструкция выходного фильтра
Выходной фильтр – одна из наиболее важных частей схемы, так как от него зависит общая эффективность, надежность и качество звука. Как указывалось ранее, LC-фильтр является распространенным подходом, поскольку он (теоретически) без потерь и имеет крутизну -40 дБ / декаду, что позволяет разумно отклонять несущую, если параметры фильтра и сама частота переключения правильно спроектированы. .
Первое, что нужно сделать, это разработать передаточную функцию для фильтра.Обычно выбирается частотная характеристика Баттерворта или аналогичная, с частотой среза немного выше звукового диапазона (30-60 кГц). Имейте в виду, что одним из конструктивных параметров является оконечная нагрузка, то есть импеданс динамика. Обычно используется типичный резистор на 4 или 8 Ом, но это приведет к вариациям измеряемой частотной характеристики в присутствии разных динамиков. Это должно быть компенсировано правильным проектированием сети обратной связи. Некоторые производители просто оставляют это так, поэтому реакция сильно зависит от нагрузки.Конечно, нежелательный вещь.
Расчет можно выполнить математически или просто с помощью одной из многих доступных программ, которые помогают в разработке ЖК-фильтров. После этого всегда полезно моделирование. На рисунке 7 показан типичный LC-фильтр для усилителей класса D и его типичная частотная характеристика.
Рисунок 7 – Частотная характеристика типичного LC 2 класса D nd Фильтр заказа
Этот простой фильтр имеет частоту среза -3 дБ, равную 39 кГц (при нагрузке 4 Ом), и подавляет несущую до 31 дБ на частоте 300 кГц.Например, если наши шины питания имеют напряжение +/- 50 В (достаточно примерно для 275 Вт при 4 Ом), остаточная пульсация будет иметь амплитуду около 1 В среднеквадратического значения.
Очевидно, что эта пульсация неслышна, и среднеквадратичное значение 1 В будет рассеиваться только около 200 мВт в типичном твитере (вряд ли проблема, тем более, что импеданс твитера будет намного выше 8 Ом на частоте 300 кГц). Однако следует соблюдать осторожность, так как провода динамика могут стать антенной и повлиять на другое оборудование. Фактически, хотя пара вольт среднеквадратичной пульсации может показаться достаточно низкой для безопасной работы ваших динамиков, электромагнитные помехи могут быть проблемой, поэтому чем меньше у вас уровень несущей, тем лучше.Для дальнейшего подавления используются фильтры более высокого порядка (с потенциальным недостатком увеличения фазового сдвига в звуковой полосе), хотя есть и другие умные способы сделать это, например, очень избирательные заградительные фильтры или режекторные фильтры, настроенные на несущую частоту (если это фиксировано, и это происходит только в синхронных проектах, как описано).
Хорошо спроектированные усилители класса D имеют фильтр более высокого порядка и / или специальные секции подавления несущей, чтобы избежать проблем с электромагнитными помехами. Как видно на рисунке 8, отклик зависит от нагрузки, и фактически нагрузка является частью фильтра.Это одна из проблем, которую необходимо решить в конструкциях класса D. Не помогает то, что громкоговоритель представляет полностью другой импеданс усилителю, чем тестовая нагрузка, и многие усилители с ШИМ имеют фильтры, которые не подходят (и никогда не могут быть) правильными для всех практических нагрузок громкоговорителей. Опять же, только несколько хороших усилителей класса D используют методы обратной связи, которые включают выходной фильтр для компенсации изменений импеданса и имеют почти независимую от нагрузки частотную характеристику, а также для уменьшения искажений, вызванных нелинейностями в фильтре.Хотя считается, что пассивные компоненты не имеют искажений, это не относится к сердечникам из феррита или порошкового железа, которые используются для фильтров. Эти компоненты наверняка вносят искажения.
Теперь, компоненты фильтра …
Выходной индуктор должен выдерживать весь ток нагрузки, а также иметь накопительную способность, как в любом неизолированном переключающем преобразователе (конструкция полумоста класса D фактически аналогична понижающему преобразователю. , его опорным напряжением является звуковой сигнал).
Идеальный индуктор (с точки зрения линейности) – это индуктор с воздушным сердечником, но размер и количество витков, требуемых для типичной работы класса D, обычно делают его непрактичным, поэтому сердечник обычно используется для уменьшения количества витков, а также обеспечить ограниченное магнитное поле, которое снижает излучаемые электромагнитные помехи. Обычно выбирают порошковые сердечники или аналогичные материалы. Это также можно сделать с ферритовыми сердечниками, но они должны иметь воздушный зазор для предотвращения насыщения. Размер провода также должен быть тщательно выбран, чтобы потери постоянного тока были низкими (требуется толстый провод), но также уменьшался скин-эффект (сопротивление переменному току также должно быть низким).
Форма сердечника индуктора может быть сердечником барабана, ферритовым сердечником RM с зазором или сердечником из тороидального порошка, среди прочего. Барабанные сердечники имеют проблему, заключающуюся в том, что их магнитное поле не закрыто, что создает более излучаемые электромагнитные помехи. Сердечники RM решают эту проблему, но у них большая часть змеевика закрыта, поэтому могут возникнуть проблемы с охлаждением, поскольку поток воздуха невозможен. ИМО, тороиды предпочтительнее, потому что они имеют как замкнутое магнитное поле, которое помогает контролировать излучаемые электромагнитные помехи, физически открытую структуру, которая обеспечивает надлежащее охлаждение, так и легкую и экономичную намотку, поскольку им не нужны бобины.
Формы катушек … Катушки и сердечники типа барабана, тороида и RM (Wilco & Coilcraft)
Многие производители сердечников, такие как Micrometals или Magnetics, предлагают собственное программное обеспечение, очень полезное для проектирования выходного индуктора, поскольку оно помогает выбрать правильный сердечник, размер провода и геометрические параметры. Конденсатор обычно находится в диапазоне от 200 нФ до 1 мкФ и должен быть хорошего качества. Конденсатор частично отвечает за высокочастотные характеристики и требует низких потерь. Конечно, он должен быть рассчитан на полное выходное напряжение, но желательно намного выше.Обычно выбирают полипропиленовые конденсаторы, а сетевые конденсаторы Х2 распространены. Излишне говорить, что нельзя использовать электролиты!
7 – Обратная связь
Как я уже говорил ранее, ошибки синхронизации могут привести к увеличению искажений и шумов. Это нельзя пропустить, и чем точнее она будет сохранена, тем лучше будет дизайн. Усилители класса D с разомкнутым контуром вряд ли будут удовлетворять строгим требованиям, поэтому отрицательная обратная связь почти обязательна. Есть несколько подходов.Самый простой и распространенный – взять часть сигнала переключения, предварительно обработать ее с помощью пассивного RC-фильтра нижних частот и подать обратно на усилитель ошибки.
Проще говоря, усилитель ошибки – это операционный усилитель, помещенный в тракт прохождения сигнала (перед компаратором ШИМ), который суммирует входной сигнал с сигналом обратной связи для генерации сигнала ошибки, который усилители автоматически минимизируют (это концепция каждого отрицательного сигнала). -система обратной связи).
Рисунок 8 – Типичные сетевые подключения с обратной связью
Несмотря на то, что таким образом получаются хорошие результаты, все же остается проблема: зависимость от нагрузки из-за того, что динамик является неотъемлемой частью фильтра и, следовательно, влияет на его частотную характеристику, как показано выше.
Некоторые более продвинутые усилители принимают сигнал обратной связи с самого выхода, пытаясь это компенсировать. Таким образом, достигается постоянная частотная характеристика с дополнительным усилением, заключающимся в том, что сопротивление катушки индуктивности вносит гораздо меньший вклад в выходной импеданс, поэтому он остается более низким, следовательно, коэффициент демпфирования выше (более высокое управление динамиком). Однако получить обратную связь после фильтра – непростая задача. LC вводит полюс и, следовательно, фазовый сдвиг, который, если не будет должным образом компенсирован, сделает усилитель нестабильным и, в конечном итоге, начнет колебаться.Обратная связь может быть получена как от коммутационного узла, так и от выхода фильтра. Хотя это может дать очень хорошие результаты, по-прежнему трудно поддерживать стабильность из-за фазового сдвига через выходной фильтр.
8 – Другие топологии
Чистая ШИМ (основанная на треугольных генераторах, также называемая «ШИМ с естественной дискретизацией») – не единственный способ создания усилителей класса D. Возникло несколько других топологий, многие из которых основаны на автоколебаниях, где гистерезис в компараторе и задержки между компаратором и силовым каскадом могут быть приняты во внимание для разработки системы, которая колеблется сама по себе в некоторой степени управляемым образом.
Несмотря на простоту, эти конструкции имеют некоторые недостатки, IMO. Например, частота переключения не фиксированная, а зависит от амплитуды сигнала. Это делает выходные режекторные фильтры неэффективными, что приводит к более высоким уровням пульсации. Когда несколько каналов объединены, разница в частоте переключения между ними может привести к появлению частот биений, которые могут стать слышимыми и очень раздражающими. Это также может произойти, конечно, с синхронным дизайном, описанным здесь, но есть простое решение – использовать одни и те же часы для всех каналов.
Некоторые автоколебательные конструкции могут иметь другие трудности, такие как запуск: могут потребоваться специальные схемы, которые заставят усилитель начать колебаться. И наоборот, если по какой-либо причине колебания прекратятся, вы можете получить «всегда включенный» полевой МОП-транзистор и, следовательно, большое количество постоянного тока на выходе, за которым почти сразу же выйдет из строя громкоговоритель. Конечно, эти проблемы можно решить с помощью правильного дизайна, но добавленная сложность может свести на нет первоначальную простоту, поэтому никакой выгоды не получится.
Низкие искажения в усилителе ШИМ требуют очень линейного треугольного сигнала, а также очень быстрого и точного компаратора. На высоких рабочих частотах, необходимых для оптимальной общей производительности, используемые операционные усилители должны иметь широкую полосу пропускания, чрезвычайно высокую скорость нарастания напряжения и отличную линейность. Достичь этого дорого, требуются устройства премиум-класса. Некоторые из этих ограничений частично снимаются за счет автоколебательных конструкций (что делает их немного дешевле), но по большей части это неэффективный компромисс.
Тактовые схемы (фиксированная частота) не легче сделать, чем конструкции с автоколебаниями или модуляцией частоты переключения, но они, безусловно, гораздо более предсказуемы и, как правило, имеют меньше проблем в целом. Возможность синхронизации нескольких усилителей гарантирует, что взаимные помехи сведены к минимуму. «Преимущество», заявленное сторонниками схем без тактовой частоты и «случайного переключения», заключается в том, что РЧ-энергия на выводах динамиков распространяется в широком диапазоне частот, что потенциально делает такие усилители более вероятными (или, возможно, менее маловероятными) для прохождения электромагнитных помех. тестирование.С общей точки зрения, это скорее будет препятствием, чем преимуществом, поскольку больше невозможно оптимизировать сеть фильтров для максимального подавления частоты переключения.
Существуют также усилители PWM, которые утверждают, что они действительно «цифровые», использующие технологию One-Bit ™ или генерирующие сигнал PWM непосредственно из потока данных PCM. Хотя производители таких усилителей, естественно, будут заявлять о своем превосходстве над всеми остальными, такое самовосхваление, как правило, следует игнорировать.Реализовать обратную связь в «чистом» цифровом проекте в лучшем случае сложно, и может быть невозможно без использования DSP (цифрового сигнального процессора) или использования внешней аналоговой системы обратной связи. Включение дополнительных АЦП и ЦАП (аналого-цифровых преобразователей и наоборот) вряд ли позволит усилителю быть «лучше», чем прямые аналоговые методы, описанные в этой статье.
Относительным новичком на сцене является модулятор сигма-дельта, однако на момент написания у него все еще есть проблемы (проблемы в корпоративной речи).Основная проблема заключается в том, что скорость перехода слишком высока, и ее необходимо уменьшить, чтобы приспособить к реальным компонентам, в частности, полевым МОП-транзисторам с переключением мощности.
«Чистые» цифровые решения, описанные выше, имеют еще один недостаток, а именно тот факт, что количество импульсов различной ширины конечно и определяется тактовой частотой. Цифровая система может включать только тактовый переход. Согласно имеющейся в настоящее время информации, при добавлении в систему цифрового фильтра формирования шума возможна только 8-кратная передискретизация.Система аналоговой модуляции имеет фактически бесконечное количество импульсов различной ширины, но это невозможно при любой истинно цифровой реализации.
Эти последние комментарии охватывают очень сложную область, одна из которых выходит за рамки данной статьи. Однако даже скудная информация, приведенная выше, даст большинству читателей гораздо больше информации, которая обычно доступна, особенно от производителей цифровых усилителей класса D.
9 – Некоторые заключительные примечания
В заключение, усилители класса D претерпели значительные изменения с момента своего первого изобретения, достигнув уровней производительности, аналогичных обычным усилителям, и даже лучше в некоторых аспектах, таких как присущий им низкий выходной импеданс, обеспечивающий легкие низкие частоты.И все это с большим преимуществом – высокой эффективностью. Конечно, только если они правильно спроектированы.
Однако, несмотря на свою привлекательность, дизайн класса D не очень удобен для самостоятельного использования. Чтобы добиться правильной работы конструкции с точки зрения эффективности, производительности и электромагнитных помех, требуется очень тщательная компоновка печатной платы, выбор некоторых компонентов имеет решающее значение и, конечно же, абсолютно необходимы надлежащие приборы.
Эта статья была написана для того, чтобы пролить свет на внутреннее устройство, преимущества и трудности этой не очень известной (и даже менее хорошо изученной) технологии.Все думают, что «Class-D» означает «цифровой». Надеюсь, что после прочтения этой статьи никто не подумает, что больше
Основной индекс Указатель статей
Уведомление об авторских правах. Эта статья, включая, помимо прочего, весь текст и диаграммы, является интеллектуальной собственностью Серджио Санчеса Морено и Рода Эллиотта и защищена авторским правом © 2005.Больше новостей |