
АО “Лаборатория электроники”
Коллекторные двигатели постоянного тока получили широкое распространение за счет своей дешевизны и высокого КПД. Чаще всего такие двигатели используются в старт/стоп режиме и не требуют для своего подключения никакой пускорегулирующей аппаратуры, кроме обыкновенного выключателя. Однако, часто требуется регулировка скорость вращения, момент на валу или положение механизма, приводимого в движение двигателем. В таких случаях применяют микропроцессорные блоки управления коллекторными двигателями постоянного тока. Простейшим регулятором оборотов двигателя является источник питания с изменяемым выходным напряжением или ШИМ регулятор (именно его продают на Aliexpress). Это простые и недорогие решения, но такой регулятор не имеет обратной связи – обороты двигателя с таким регулятором зависят от нагрузки на валу. Для решения этой проблемы в регуляторы вводят обратную связь по скорости вращения. Простейшим вариантом получения информации о скорости вращения двигателя является установка на его валу тахогенератора или импульсного датчика.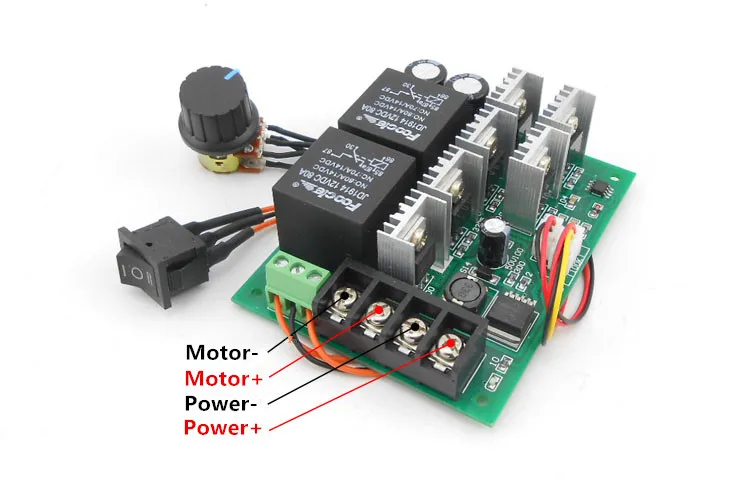 Такие решения позволяют решить проблему стабилизации скорости вращения двигателя, но усложняет конструкцию изделия и увеличивает его стоимость. Современные микропроцессорные технологии позволяют использовать в качестве тахогенератора сам электродвигатель (почти все электрические машины обратимы), измеряя ЭДС, генерируемую двигателем в момент кратковременного отключения от него питающего напряжения. Такое решение представляется оптимальным по соотношению цена/качество.
Такие решения позволяют решить проблему стабилизации скорости вращения двигателя, но усложняет конструкцию изделия и увеличивает его стоимость. Современные микропроцессорные технологии позволяют использовать в качестве тахогенератора сам электродвигатель (почти все электрические машины обратимы), измеряя ЭДС, генерируемую двигателем в момент кратковременного отключения от него питающего напряжения. Такое решение представляется оптимальным по соотношению цена/качество.
Вторым важным параметром регулирования коллекторных двигателей является момент на валу двигателя. В большинстве случаев ограничение момента требуется для исключения повреждения самого двигателя или механизма. Часто необходим режим стабилизации именно выходного момента двигателя, например, для управления электроприводом скутера или для регулировки силы натяжения у станка для перетяжки теннисных ракеток. В качестве сигнала выходного момента чаще всего используется мгновенное значение тока якоря двигателя.
И третий параметр управления –положение или координата механизма, приводимого в действие двигателем постоянного тока.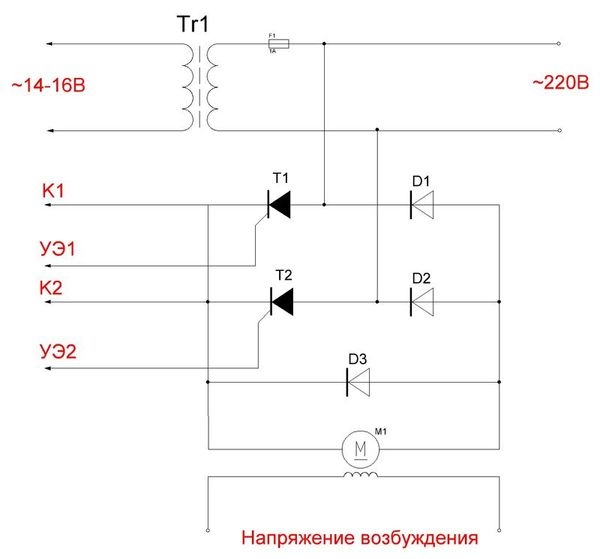 Управление скоростью, моментом и положением позволяет создавать полноценные сервоприводы на основе коллекторных двигателей. Сигнал обратной связи по положению может быть получен от аналогового потенциометрического датчика или энкодера на валу двигателя. Для задания требуемого положения может использоваться аналоговый сигнал, цифровой интерфейс или входы step/dir как в блоках управления шаговыми двигателями.
Управление скоростью, моментом и положением позволяет создавать полноценные сервоприводы на основе коллекторных двигателей. Сигнал обратной связи по положению может быть получен от аналогового потенциометрического датчика или энкодера на валу двигателя. Для задания требуемого положения может использоваться аналоговый сигнал, цифровой интерфейс или входы step/dir как в блоках управления шаговыми двигателями.
АО “Лаборатория электроники”
Блок управления коллекторным двигателем постоянного тока AWD50 предназначен для управления скоростью вращения, моментом, и угловым положением двигателей постоянного тока с напряжением питания 12…110 В и током до 50 А.
Блок AWD50 позволяет реализовать сервопривод на основе коллекторного двигателя постоянного тока.
Версия 5.хх
Режимы работы:
- Прямое управление ШИМ от RS485 без регуляторов и ограничений (ШИМ)
- Управление скоростью вращения без контроля тока (момента) (Ск)
- Управление моментом без контроля скорости вращения (М)
- Управление скоростью вращения с ограничением момента (СкМ)
Источники сигнала задания скорости вращения:
- аналоговый сигнал -10.
 ..10 В или 0…5 В
..10 В или 0…5 В - интерфейс RS485 Modbus RTU
- встроенный потенциометр
- разность двух аналоговых сигналов
- разность аналогового сигнала и задания по RS485
- разность числа импульсов между входом Step/dir и энкодером обратной связи
- разность числа импульсов между заданием траектории движения и энкодером обратной связи
- длительность положительного импульса входного сигнала Step
- разность времени положительного и отрицательного импульса сигнала Step
Источники сигнала обратной связи по скорости:
- противо-ЭДС двигателя
- произведение мгноверного тока на сопротивление якоря IR
- аналоговый сигнал от -10 до 10 В (например сигнал от тахогенератора)
- число импульсов на входе Step за заданный промежуток времени
- число импульсов на входе энкодера за заданный промежуток времени
Источники сигнала задания момента на валу двигателя:
- аналоговый сигнал от -10 до 10 В
- разность двух аналоговых сигналов
- интерфейс RS485 Modbus RTU
- разность аналогового сигнала и значения от интерфейса RS485 Modbus RTU
- встроенный потенциометр
- разность числа импульсов между входом Step/dir и энкодером обратной связи
- разность числа импульсов между заданием траектории движения и энкодером обратной связи
- длительность положительного импульса входного сигнала Step
- разность времени положительного и отрицательного импульса сигнала Step
Источники сигнала обратной связи по моменту:
- мгновенный ток двигателя
Источники сигнала значений ПИ регуляторов момента и скорости вращения:
- встроенные потенциометры
- интерфейс RS485
Источник сигнала концевых выключателей:
- дискретные входы с возможностью инверсии срабатываний
- переход в режим стабилизации момента на время более заданного
Основные характеристики блока управления коллекторным двигателем постоянного тока
AWD50 V5. хх:
хх:
- ПИ регулятор скорости вращения двигателя
- ПИ регулятор момента на валу двигателя
- Фильтрация входных сигналов с заданной постоянной времени
- Программирование диапазона изменения входных сигналов
- Возможность инверсии дискретных сигналов запуска и концевых выключателей
- Встроенный формирователь траектории движения от точки к точке с заданием координаты, скорости и ускорения
- Режим “электронный кулачек” для реализации колебаний механизма между двумя точками
- Постоянный подсчет числа импульсов (32 разряда) на входах энкодер и Step/Dir
- Возможность установки преобразователя СКВТ-энкодер или преобразователя сельсин – энкодер
- Напряжение питания двигателей от 12 до 110В
- Максимальный ток двигателя 50А
- Возможность управления коллекторными двигателями с постоянными магнитами, независимым или последовательным возбуждением
- Плавный разгон и торможение с заданием ускорения
- Встроенный тормозной резистор со схемой управления и возможностью подключения дополнительного сопротивления
- Возможность работы в режиме торможения
- Обработка концевых выключателей и входа разрешение движения
- Защита от перегрева
- Защита от короткого замыкания выхода
- Частота ШИМ 20кГц
- Управление по интерфейсу RS485 ModBus или аналоговыми и дискретными сигналами
- Рабочий температурный диапазон от -40 до +55 С
Возможные применения блока управления коллекторным двигателем постоянного тока AWD50 V5.
- Управление скоростью вращения и ограничением момента коллекторного двигателя с постоянными магнитами или независимым возбуждением без дополнительных датчиков.
- Управление скоростью вращения и ограничением момента коллекторного двигателя с обратной связью по тахогенератору.
- Управление скоростью вращения и ограничением момента коллекторного двигателя с обратной связью по квадратурному энкодеру.
- Управление скоростью вращения и ограничением момента коллекторного двигателя с обратной связью по импульсному датчику.
- Управление положением исполнительного механизма с обратной связью по потенциометрическому датчику и аналоговым заданием.
- Управление положением исполнительного механизма с обратной связью по потенциометрическому датчику и заданием по RS485.
- Управление механизмами без концевых выключателей с остановкой по переходу в режим стабилизации момента.
- Реализация режима “шагового двигателя” с управлением положением входом Step/Dir и обратной связью по квадратурному энкодеру.

- Управление угловым положением вала двигателя с обратной связью по квадратурному энкодеру. Задание кривой разгон-скорость-торможение с возможностью изменения параметров в процессе отработки.
- Реализация бесконечных колебаний между двумя точками любого механизма, снабжённого энкодером
- Усилитель мощности класса D. Прямое управление величиной ШИМ.
- Управление углом поворота вала по сигналу PWM (аналог сервомашинки).
Примеры подключения для различных режимов работы блока управления
Режим 1
Управление скоростью вращения и ограничением момента коллекторного двигателя с постоянными магнитами или независимым возбуждением без дополнительных датчиков.
Управление скоростью вращения и ограничением момента коллекторного двигателя с постоянными магнитами или независимым возбуждением без дополнительных датчиков внешними аналоговыми сигналами
Управление скоростью вращения и ограничением момента коллекторного двигателя с постоянными магнитами или независимым возбуждением без дополнительных датчиков.
Управление скоростью вращения и ограничением момента коллекторного двигателя с постоянными магнитами или независимым возбуждением без дополнительных датчиков по RS485.
Режим 2Управление скоростью вращения и ограничением момента коллекторного двигателя с обратной связью по тахогенератору.
Управление скоростью вращения и ограничением момента коллекторного двигателя с обратной связью по тахогенератору
Режим 3Управление скоростью вращения и ограничением момента коллекторного двигателя с обратной связью по квадратурному энкодеру.
Управление скоростью вращения и ограничением момента коллекторного двигателя с обратной связью по квадратурному энкодеру
Режим 4
Управление скоростью вращения и ограничением момента коллекторного двигателя с обратной связью по импульсному датчику.
Управление скоростью вращения и ограничением момента коллекторного двигателя с обратной связью по импульсному датчику
Режим 5Управление положением исполнительного механизма с обратной связью по потенциометрическому датчику и аналоговым заданием.
Управление положением исполнительного механизма с обратной связью по потенциометрическому датчику и аналоговым заданием. Управление с помощью токовой петли 4-20мА.
Управление положением исполнительного механизма с обратной связью по потенциометрическому датчику и аналоговым заданием. Управление с помощью разности между входами AN1 и AN0.
Управление положением исполнительного механизма с обратной связью по потенциометрическому датчику и заданием по RS485.
Управление положением исполнительного механизма с обратной связью по потенциометрическому датчику и заданием по RS485
Режим 7Управление механизмами без концевых выключателей с остановкой по переходу в режим стабилизации момента.
Управление механизмами без концевых выключателей с остановкой по переходу в режим стабилизации момента
Режим 8Реализация режима “шагового двигателя” с управлением положением входом Step/Dir и обратной связью по квадратурному энкодеру.
Реализация режима “шагового двигателя” с управлением положением входом Step/Dir и обратной связью по квадратурному энкодеру
Режим 9Управление угловым положением вала двигателя с обратной связью по квадратурному энкодеру. Задание кривой разгон-скорость-торможение с возможностью изменения параметров в процессе отработки.
Реализация бесконечных колебаний между двумя точками любого механизма, снабжённого энкодером.
Реализация бесконечных колебаний между двумя точками любого механизма, снабжённого энкодером.
Управление угловым положением вала двигателя с обратной связью по квадратурному энкодеру. Задание кривой разгон-скорость-торможение с возможностью изменения параметров в процессе отработки.
Задание кривой разгон-скорость-торможение с возможностью изменения параметров в процессе отработки.
Усилитель мощности класса D. Прямое управление величиной ШИМ
Усилитель мощности класса D. Прямое управление величиной ШИМ
Управление углом поворота вала по сигналу PWM (аналог сервомашинки)
Управление углом поворота вала по сигналу PWM (аналог сервомашинки)
Продукция изготовлена по техническим условиям МДТУ. 421212.002 ТУ “Блоки управления двигателями постоянного тока AWD”
блок управления двигателем постоянного тока, код блок управления двигателем постоянного тока, цена 62 500,00 ₽
Здравствуйте! Вы попали на доску объявлений. Сотрудники Promelectrica.com разместили тут товары, которые Вам могут быть интересны. Информация о наличии по телефону (495)640-04-53
Подробное описание
Коллекторный электродвигатель постоянного тока с электромагнитным возбуждением Д-16Б предназначен для привода специального механизма, а также может быть использован в различных областях техники.
Структура условного обозначения
Д-16Б:
Д – двигатель;
16 – порядковый номер разработки;
Б – модификация исполнения двигателя.
Условия эксплуатации
Температура окружающего воздуха при эксплуатации от минус 60 до 50°С. Пониженное атмосферное давление однократно в течение 5 мин при номинальном вращающем моменте – не ниже 667 Па (5 мм рт.ст).
Верхнее значение относительной влажности воздуха в течение 48ч – 98% при температуре (35±5)°С.
Электродвигатель стоек к воздействию:
Вибрационных нагрузок с диапазоном частот от 5 до 35 Гц и амплитудой не более 1 мм в течение 3 мин.
Вибрационных нагрузок с диапазоном частот от 35 до 2000 Гц и ускорением от 39,2 до 147,2 мс-2 (от 4 до 15 g) в течение 23 мин.
Линейных (центробежных) нагрузок с ускорением 98,1 мс-2 (10 g) в течение 5 мин.
Механические нагрузки воздействуют на места крепления двигателя в любом направлении.
Двигатель выдерживает воздействие:
Вибрационных нагрузок с частотой вибрации от 10 до 2000 Гц и ускорением, действующим вдоль и перпендикулярно оси двигателя, от 20 до 40 мс-2 (от 2 до 4 g) в течение 46 ч в обесточенном состоянии и 2,8 ч при электрической нагрузке.
Ударных многократных нагрузок с ускорением 50 мс-2 (5 g) при количестве ударов 5000 с частотой от 40 до 100 ударов в час и длительностью удара от 5 до 10 мс.
Номинальный режим работы двигателя кратковременный при напряжении питания 27 В:
15 мин при вращающем моменте 1,47 Нм.
5 мин при вращающем моменте 1,76 Нм.
1 с при вращающем моменте 3,43 Нм.
Конструктивное исполнение по способу монтажа в соответствии с ГОСТ 2479-79 IМ3081.
Направление вращения вала левое со стороны выхода вала.
Сопротивление изоляции электрических цепей относительно корпуса двигателя в нормальных климатических условиях при практически холодном состоянии двигателя до ввода в эксплуатацию – не менее 20 МОм.
В течение срока службы и минимальной наработки сопротивление изоляции при практически холодном состоянии двигателя – не менее 1 МОм.
Изоляция электрических цепей относительно корпуса двигателя в нормальных климатических условиях выдерживает без пробоя и перекрытия воздействие испытательного напряжения 500 В (действующее значение) переменного тока частотой 50 Гц.
Степень искрения на коллекторе двигателя при номинальном вращающем моменте и номинальном напряжении питания в нормальных климатических условиях не превышает 2 по ГОСТ 183-74.
Двигатель соответствует требованиям технических условий ОДС.515.151 и комплекта конструкторской документации согласно 1ДС.599.112 СД.
Условия транспортирования двигателя в упаковке предприятия-изготовителя в части воздействия механических факторов соответствуют условиям Л по ГОСТ 23216-78; в части воздействия климатических факторов внешней среды – таким же, как условия хранения 5 по ГОСТ 15150 – 69.
Условия хранения двигателя соответствуют условиям I (отапливаемое хранилище), условиям 3 (неотапливаемое хранилище) и условиям 5 (навесы в макроклиматических районах с умеренным и холодным климатом) по ГОСТ 15150-69.
Эксплуатацию двигателей следует проводить в соответствии с техническим описанием и инструкцией по эксплуатации 1ДС.599.112 ТО.
В процессе хранения двигатель, вмонтированный в аппаратуру изделия, должен подвергаться проверке на функционирование не реже одного раза в год.
При проверке на функционирование двигатель работает при напряжении питания 27 В на холостом ходу или при номинальном вращающем моменте в течение одной минуты.
Изготовитель гарантирует качество двигателя при соблюдении режимов работы и условий эксплуатации. ОДС.515.151
Технические характеристики
Номинальное напряжение питания, В – 27 Номинальный вращающий момент, Нм – 1,76 Номинальная частота вращения, мин-1 – 8000 Потребляемый ток при номинальном вращающем моменте, А, не более – 78 Потребляемый ток при холостом ходе, А, не более – 17 Частота вращения при холостом ходе, мин-1, не более – 10900 КПД, % – 70 Момент инерции якоря, кгм2 – 8,310-4 Масса двигателя, кг, не более – 7
Двигатель в течение 5 мин допускает работу при номинальном вращающем моменте и напряжении питания, лежащем в пределах от 22 до 30 В. При этом в нормальных климатических условиях: частота вращения изменяется в пределах от 6100 до 9000 мин-1; потребляемый ток – не более 88 А.
Двигатель в течение 5 мин работы в выше указанном режиме допускает в течение 30 с работу при вращающем моменте 3,43 Нм.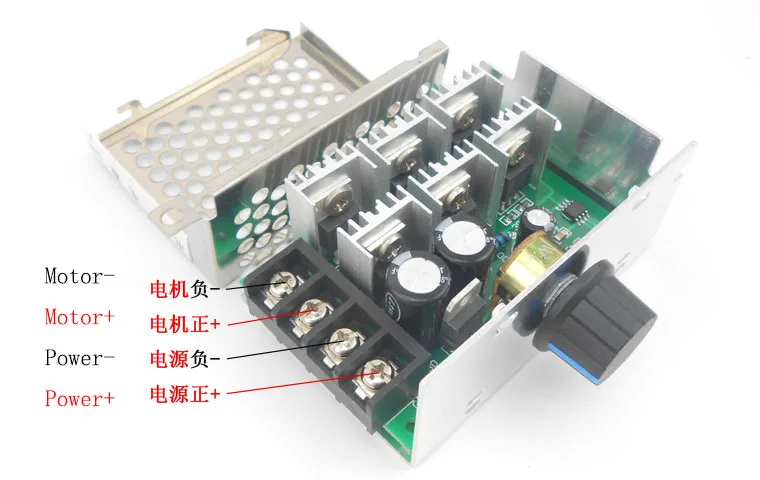 Параметры двигателя при этом не оговариваются.
Параметры двигателя при этом не оговариваются.
Двигатель в течение 10 мин допускает работу при вращающем моменте 0,49 Нм, температуре 50°С и напряжении питания, лежащем в пределах от 22 до 30 В с последующей работой при пониженном атмосферном давлении; в течение 20 мин в нормальных климатических условиях с последующим охлаждением.
Частота вращения после работы в указанном режиме с последующим охлаждением и при последующей работе в течение 5 мин при номинальном вращающем моменте и напряжении питания 27 В – не менее 7000 мин-1.
Потребляемый ток в этих же условиях – не более 84 А.
Напряжение трогания при нижнем значении температуры и вращающем моменте 1,47 Нм – не более 8 В.
Напряжение трогания в нормальных климатических условиях при холостом ходе – не более 7 В.
Минимальная наработка двигателя при номинальном напряжении питания 60 ч, в том числе:
20 ч непрерывно при вращающем моменте 0,98 Нм;
40 ч в номинальном режиме, из них 6 ч при верхнем значении температуры и 6 ч при нижнем значении температуры.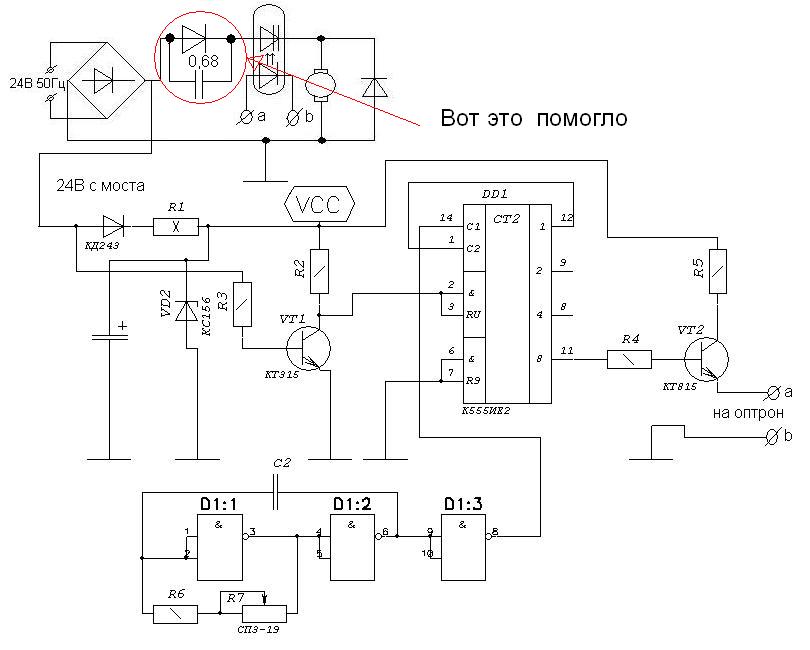
Перерыв между включениями двигателя до полного охлаждения.
Минимальный срок службы двигателя – 10,5 лет.
Минимальный срок сохраняемости двигателя в отапливаемом хранилище – 10,5 лет, в том числе:
не более 1 года в упаковке предприятия-изготовителя;
не более 10,5 лет вмонтированным в аппаратуру изделия.
В пределах срока сохраняемости допускается хранение двигателя вмонтированным в аппаратуру защищенного изделия:
не более 5 лет в неотапливаемом хранилище;
не более 1 года под навесом.
Гарантийная наработка в пределах гарантийного срока эксплуатации – 60 ч.
Гарантийный срок эксплуатации – 10,5 лет.
Гарантийный срок хранения – 10,5 лет.
Блок управления двигателем постоянного тока
Блок управления двигателем постоянного тока БУД-1 предназначен для управления двигателями постоянного тока напряжением 24 вольта, мощностью до 150 Вт от сети постоянного напряжения 220 вольт.
Условия эксплуатации:
- температура окружающей среды от -25 до +50° С;
- относительная влажность воздуха до 95% при температуре +40° С;
- наибольшая высота установки — 1000 метров над уровнем моря;
- окружающая среда – взрывобезопасная;
- тип атмосферы – II.
№ п/п | Наименование параметра и характеристики | Значение параметра |
1 | Напряжение питания постоянного тока, В | 220+22-33 |
2 | Выходное напряжение постоянного тока во всем диапазоне питающего напряжения при изменении нагрузки от 50 до 160-180 Вт, В | 24±1 |
3 | Номинальная мощность преобразователя, Вт, не менее | 135 |
4 | Время отключения выходного напряжения при превышении потребляемого тока по вторичной цепи выше номинального (5,6А) на (20-35) % , сек | 2,25±0,75 |
5 | Габаритные размеры модулей, мм, не более
| 155х69х28 210х160х160 |
6 | Масса узлов, кг, не более
| 0,6 3,6 |
Блок управления состоит из узла преобразователя, индикации и выносного пульта управления. Узел преобразователя имеет выходной жгут из 11 (одиннадцати) залуженных на концах проводов для подключения к внешним цепям. Включение блока управления осуществляется при подключении выносного пульта управления к узлу преобразователя. Включение индицируется зеленым светодиодом “Питание”. При нажатии кнопки “Вперед” на пульте управления, двигатель вращается по часовой стрелке. При этом мигает желтый светодиод “работа” на передней панели БУВВТ. Замыкание выводов “Работа” полностью блокирует возможность вращения двигателя по часовой стрелке. При нажатии кнопки “назад” на пульте управления, двигатель вращается против часовой. При этом мигает синий светодиод “Контроль” на передней панели БУВВТ. Замыкание выводов “Контроль” полностью блокирует возможность вращения двигателя против часовой стрелки. Команда “Стоп” на пульте управления отменяет любые действия. Замыкание выводов “Блокировка” дублирует действие кнопки “Назад”. Команда “Назад” является приоритетной, т.е. при одновременном нажатии кнопок “Назад” и “Вперед” выполняется команда “Назад”.
Узел преобразователя имеет выходной жгут из 11 (одиннадцати) залуженных на концах проводов для подключения к внешним цепям. Включение блока управления осуществляется при подключении выносного пульта управления к узлу преобразователя. Включение индицируется зеленым светодиодом “Питание”. При нажатии кнопки “Вперед” на пульте управления, двигатель вращается по часовой стрелке. При этом мигает желтый светодиод “работа” на передней панели БУВВТ. Замыкание выводов “Работа” полностью блокирует возможность вращения двигателя по часовой стрелке. При нажатии кнопки “назад” на пульте управления, двигатель вращается против часовой. При этом мигает синий светодиод “Контроль” на передней панели БУВВТ. Замыкание выводов “Контроль” полностью блокирует возможность вращения двигателя против часовой стрелки. Команда “Стоп” на пульте управления отменяет любые действия. Замыкание выводов “Блокировка” дублирует действие кнопки “Назад”. Команда “Назад” является приоритетной, т.е. при одновременном нажатии кнопок “Назад” и “Вперед” выполняется команда “Назад”. При превышении потребляемого тока по вторичной цепи выше номинального, подача выходного напряжения прекращается, загорается красный светодиод “Авария”, при этом блокируются любые команды.
При превышении потребляемого тока по вторичной цепи выше номинального, подача выходного напряжения прекращается, загорается красный светодиод “Авария”, при этом блокируются любые команды.
Блок управления двигателем постоянного тока / Блог им. Sayron / Блоги по электронике
В настоящее время двигатели постоянного тока нашли широкое применение в различных отраслях промышленности. Двигатели постоянного тока используются там, где требуется плавное и точное регулирование скорости и вращающего момента в широких пределах. В этой статье я расскажу о создании блока управления для двигателя постоянного тока, который позволял бы изменять частоту вращения вала двигателя и стабилизировал обороты на определенном уровне, вне зависимости от нагрузки на валу двигателя.В основе разработки положен принцип работы следящего привода с одноконтурной системой регулирования.
Блок управления состоит из следующих узлов:
— СИФУ (Система Импульсно — Фазового Управления)
— Регулятор
— Защита
Принципиальная схема привода приведена ниже.

Крупнее
Рассмотрим схему поподробнее.
Итак, СИФУ (Система Импульсно — Фазового Управления) — преобразует синусоидальное напряжение сети в серию прямоугольных импульсов, идущих на управляющие электроды силовых тиристоров. При включении блока управления переменное напряжение величиной 14-16в поступает на мостовой выпрямитель D1, где преобразуется в пульсирующее напряжение, служащее не только для питания схемы, но и для синхронизации работы привода. Диод D2 препятствует сглаживанию импульсов конденсатором С1. Далее импульсы поступают на «детектор нуля» — DA1.1, собранного на одном ОУ микросхемы LM324, работающего в режиме компаратора. Пока нет импульса, напряжения на прямом и инверсном входах примерно равны и компаратор находиться в сбалансированном состоянии. При прохождении фазы через «0», на инверсном входе компаратора DA1.1 играющего роль «детектора нуля» появляются импульсы, переключающие компаратор, в результате чего на выходе DA1.1 вырабатываются прямоугольные синхроимпульсы, период следования которых жестко привязан к похождению фазы через «0».

Ниже представлены осциллограммы, поясняющие принцип работы.
Сверху вниз: КТ1, КТ2, КТ3.
Схема была просимулированна в программе Multisim 11. Вот файл проекта. Можно скачать, запустить и посмотреть как работает данный узел.
Далее синхроимпульсы поступают на интегратор с транзисторным ключом (С4, Q1), где и вырабатывается пилообразное напряжение. В момент прохождения фазы через «0» синхроимпульс открывает транзистор Q1, который разряжает конденсатор С4. После спада импульса транзистор закрывается и происходит заряд конденсатора до прихода следующего синхроимпульса, в результате чего на коллекторе Q1 (осцил. КТ4). формируется линейно нарастающее пилообразное напряжение, стабилизированное генератором стабильного тока выполненного на полевом транзисторе T1. Амплитуда „пилы“ равное 9в выставляется подстроечным резистором RP1. Напряжение „пилы“ поступает на прямой вход компаратора DA1.2.
Напряжение задания поступает на инверсный вход компаратора DA1.2 и в момент, когда пилообразное напряжение превышает величину напряжения на инверсном входе компаратора, компаратор переключиться и на выходе компаратора формируется импульс (осцил.
 КТ4). Импульс дифференцируется через цепочку R14, C6 и поступает на базу транзистора Q2. Транзистор открывается и на импульсном трансформаторе Tr1 формируются импульсы открытия силовых тиристоров. Увеличивая (уменьшая) напряжение задания, меняется скважность импульсов в КТ5.
КТ4). Импульс дифференцируется через цепочку R14, C6 и поступает на базу транзистора Q2. Транзистор открывается и на импульсном трансформаторе Tr1 формируются импульсы открытия силовых тиристоров. Увеличивая (уменьшая) напряжение задания, меняется скважность импульсов в КТ5.Вот осциллограммы.
Но никаких импульсов в КТ5 мы не увидим до тех пор, пока не нажмем кнопку „Пуск“ — S1. Когда кнопка не нажата, напряжение питания +12в через нормально замкнутые контакты S1 по цепочке R12, D3 поступает на инверсный вход DA1.2 и равно около 11в. Так как это напряжение превышает напряжение „пилы“ равное 9в, компаратор запирается, и управляющие импульсы открытия тиристоров не формируются. Для предотвращения аварии и выхода из строя двигателя, в случае если оператор не вывел на «0» регулятор оборотов, в схеме предусмотрен узел разгона C5, R13 служащий для плавного разгона двигателя. В режиме «Пуск», схема работает следующим образом: при нажатии кнопки «Пуск» нормально закрытые контакты размыкаются и конденсатор С5 по цепочке — «земля», R13, — С5 начинает плавно заряжаться и напряжение на отрицательной обкладке конденсатора плавно стремиться к нулю.
/F108M_(10-90V-60A)-02.JPG) Одновременно, напряжение на инвертирующем входе DA1.2 плавно возрастает до величины, определяемой напряжением задания, и компаратор начинает вырабатывать управляющие импульсы силовых тиристоров. Время заряда определяется номиналами C5, R13. Если в процессе работы двигателя необходимо изменить его обороты, чтобы избежать резких бросков оборотов — в схеме предусмотрен узел «разгона — торможения» R21, C8, R22. При увеличении (уменьшении) напряжения задания, конденсатор С8 плавно заряжается (разряжается) что предотвращает резкий «наброс» напряжения на инверсном входе усилителя и как следствие предотвращает резкий бросок оборотов двигателя.
Одновременно, напряжение на инвертирующем входе DA1.2 плавно возрастает до величины, определяемой напряжением задания, и компаратор начинает вырабатывать управляющие импульсы силовых тиристоров. Время заряда определяется номиналами C5, R13. Если в процессе работы двигателя необходимо изменить его обороты, чтобы избежать резких бросков оборотов — в схеме предусмотрен узел «разгона — торможения» R21, C8, R22. При увеличении (уменьшении) напряжения задания, конденсатор С8 плавно заряжается (разряжается) что предотвращает резкий «наброс» напряжения на инверсном входе усилителя и как следствие предотвращает резкий бросок оборотов двигателя.Теперь рассмотрим принцип работы регулятора оборотов.
Регулятор предназначен для поддержания постоянных оборотов двигателя в зоне регули-рования. Регулятор представляет собой дифференциальный усилитель с суммированием двух напряжений: напряжения задания и напряжения обратной связи. Напряжение задания задается резистором RP1 и поступает через фильтр R20, C8, R21, выполняющий одновременно функции узла «разгона — торможения», поступает на инверсный вход регулятора ОУ DA1.
 3. При увеличении напряжения задания на выходе ОУ DA1.3 линейно уменьшается выходное напряжение.
3. При увеличении напряжения задания на выходе ОУ DA1.3 линейно уменьшается выходное напряжение.Выходное напряжение регулятора поступает на инверсный вход компаратора СИФУ DA1.2 где, суммируясь с импульсами пилообразного напряжения, преобразуется в серию прямоугольных импульсов идущих на управляющие электроды тиристоров. При увеличении (уменьшении) напряжения задания увеличивается (уменьшается) и выходное напряжение на выходе силового блока.
На этом графике представлена зависимость оборотов двигателя от напряжения задания.
Значения оборотов двигателя даны для примера.
Делитель напряжения R22, R23 включенный на прямой вход регулятора DA1.3 служит для предотвращения аварии двигателя при обрыве обратной связи (при обрыве обратной связи двигатель идет в разнос).
При включении привода, тахогенератор начинает вырабатывать напряжение, пропорциональное оборотам двигателя. Это напряжение поступает на вход прецизионного детектора DA1.4, DA2.1 собранного по двухполупериодной схеме.
 Напряжение, снимаемое с выхода точного детектора DA1.4, DA2.1, поступает через фильтр C10, R30, R33 на масштабирующий усилитель обратной связи DA2.2. Усилитель служит для подгонки напряжения обратной связи поступающего с тахогенератора. Напряжение с выхода ОУ DA2.2. поступает как на вход регулятора DA1.3 так и на схему защиты DA2.3.
Напряжение, снимаемое с выхода точного детектора DA1.4, DA2.1, поступает через фильтр C10, R30, R33 на масштабирующий усилитель обратной связи DA2.2. Усилитель служит для подгонки напряжения обратной связи поступающего с тахогенератора. Напряжение с выхода ОУ DA2.2. поступает как на вход регулятора DA1.3 так и на схему защиты DA2.3.Резистором RP1 задаются обороты двигателя. При работе двигателя без нагрузки, напряжение на выходе масштабирующего усилителя ниже напряжения на выводе 6 ОУ DA1.3. ≈ +5v, поэтому привод работает как регулятор. При увеличении нагрузки на валу двигателя, уменьшается напряжение, получаемое с тахогенератора и как следствие уменьшение напряжения с выхода, масштабирующего усилителя.
Когда это напряжение будет меньше напряжение на выводе 5 ОУ DA1.3 привод входит в зону стабилизации тока. Уменьшение напряжения на неинвертирующем входе ОУ DA1.3 приводит к уменьшению напряжения на его выходе, а так как он работает на инвертирующий усилитель DA1.2, это приводит к большему углу открытия тиристоров и, следовательно, к увеличению напряжения на якоре двигателя.

СХЕМА ЗАЩИТЫ
Защита от превышения оборотов предназначена для защиты двигателя от аварии, в случае резкого превышения установленных оборотов двигателя. Схема собрана на ОУ DА2.3, включенного по схеме компаратора. На инверсный вход компаратора подается опорное напряжение с делителя R36, R37, RP3. Резистором RP3 устанавливается порог срабатывания защиты. Напряжение с выхода масштабирующего усилителя DA2.2 поступает на прямой вход компаратора защиты DA2.3. При превышении оборотов двигателя выше номинальных, напряжение на прямом входе компаратора превышает порог уставки защиты, определяемой RP3 — компаратор переключиться. Благодаря наличию в схеме положительной обратной связи R38 приводит к «за-щелкиванию» компаратора, а наличие диода VD12 препятствует сбросу компаратора. При срабатывании защиты, напряжение с выхода компаратора защиты (≈ +11v) через диод VD14 поступает на инверсный вход 13 DA1.2 СИФУ, а так как напряжение защиты превышает напряжение «пилы» (= 9v) — происходит мгновенный запрет выдачи управляющих импульсов на управляющие электроды тиристоров.
 Напряжение с выхода компаратора защиты DA2.3 открывает транзистор VT4, что приводит к срабатыванию реле Р1.1 и зажиганию светодиода VL1 сигнализирующего об аварийной ситуации. Снять защиту можно, только полностью обесточив привод, и, выдержав паузу 5 — 10 секунд вновь включив его.
Напряжение с выхода компаратора защиты DA2.3 открывает транзистор VT4, что приводит к срабатыванию реле Р1.1 и зажиганию светодиода VL1 сигнализирующего об аварийной ситуации. Снять защиту можно, только полностью обесточив привод, и, выдержав паузу 5 — 10 секунд вновь включив его.Силовая часть блока управления.
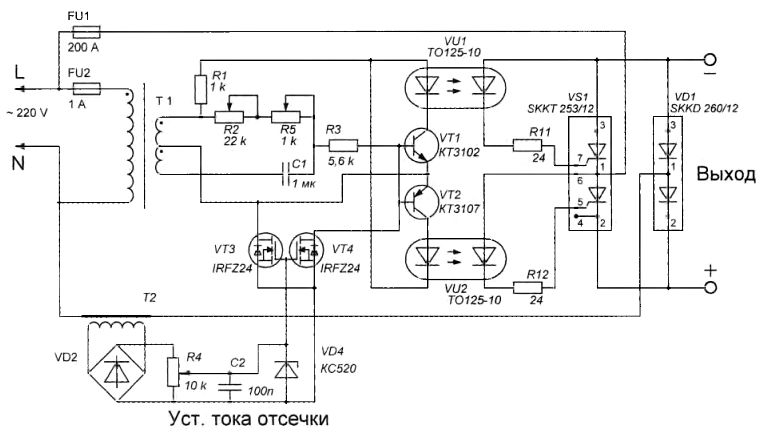
Схема силовой части представлена ниже
Трансформатор Tr1 предназначен для питания схемы блока управления. Управляемый выпрямитель собран по полумостовой симметричной схеме и содержит два силовых диода D1,D2
и два силовых тиристора Т1, Т2, и защитный диод D3. Обмотка возбуждения питается от своего отдельного трансформатора и выпрямителя.
Если на двигателе отсутствует тахогенератор, то обратную связь, для контроля оборотов, можно выполнить следующим образом:
1. Применить трансформатор тока, включенный в цепь питания управляемого выпрямителя
Если используется трансформатор тока, то перемычку P1 на схеме блока управления поставить
в положение 1-3, это необходимо потому, что при увеличении нагрузки ток якоря будет увеличиваться, следовательно напряжение, снимаемое с трансформатора тока тоже будет увеличиваться, поэтому напряжение обратной связи необходимо подавать на инвертирующий
вывод микросхемы DA1.
 3. Так же можно поставить стандартный токовый шунт, но только в цепь якоря двигателя, после выпрямителя и снимать сигнал обратной связи с него.
3. Так же можно поставить стандартный токовый шунт, но только в цепь якоря двигателя, после выпрямителя и снимать сигнал обратной связи с него.2. Использовать датчик якорного напряжения. Схема приведена ниже.
Датчик якорного напряжения представляет собой фильтр – делитель и подключается непосредственно к клеммам якоря электродвигателя. Настройка привода производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.
Теперь перейдем к конструкции и наладке блока управления.
Блок управления был выполнен на печатной плате (файл печатной платы)
Плата проводом МГТФ соединена с разъемом, для удобства демонтажа при ремонте.

Настройка
На время настройки была собрана силовая часть навесным монтажем, в качестве нагрузки была использована обычная лампа накаливания.
Наладку начинаем с проверки напряжений питания и напряжения питания на операционных усилителях DA1, DA2. Микросхемы желательно ставить в панельки. Потом контролируем осциллограммы в контрольных точках КТ1, КТ2, КТ3 (осциллограммы в этих точках приведены в начале описания СИФУ). Теперь, осциллограф ставим в контрольную точку КТ4. Должны быть пилообразные импульсы, как на осиллограмме выше (кнопка «Пуск» в этот момент должна быть разомкнута). Подстроечным резистором RP1 необходимо выставить размах «пилы» равным 9 вольт, это очень важный момент, так как от него зависит дальнейшая работа схемы. Так как разброс параметров полевых транзисторов бывает весьма значительный, возможно диапазона регулировки RP1 может не хватить, тогда подбором номинала резистора R10 добиться нужного размаха. В контрольной точке КТ3 длительность импульса должна быть 1.
 5 — 1.8ms, если нет, то подбором резистора R4 (в сторону уменьшения) добиться необходимой длительности.
5 — 1.8ms, если нет, то подбором резистора R4 (в сторону уменьшения) добиться необходимой длительности. Вращая регулятор RR1 в контрольной точке КТ5 проконтролировать изменение скважности импульсов от максимума до полного их исчезновения при нижнем положении движка RR1. При этом должна изменятся яркость лампочки подключенной к силовому блоку.
Далее подключаем блок управления к двигателю и тахогенератору. Выставляем регулятором RR1
напряжение на якоре около 40-50 вольт. Резистор RP3 должен быть установлен в среднее положение. Контролируя напряжение на якоре двигателя, начинаем вращать резистор RP3. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь. Для желающих поэкспериментировать: для увеличения жесткости привода можно также увеличить сопротивление R24, увеличив тем самым коэффициент усиления регулятора либо увеличить резистор R32.
Если используется обратная связь по току якоря двигателя.

Для этого, как говорилось выше, необходим трансформатор тока, включенный в цепь питания
управляемого выпрямителя. Схема калибровки трансформатора тока дана ниже. Подбором резистора получить на выходе трансформатора переменное напряжение ≈ 2 ÷ 2.5v. Мощность нагрузки RN1 должна соответствовать мощности двигателя.
Внимание! Трансформатор тока без нагрузочного резистора не включать.
Подключаем трансформатор тока к цепи обратной связи P1 и P2. На время настройки «Регулятора» желательно выпаять диод D12, чтобы исключить ложное срабатывание защиты.
Осциллограммы в контрольных точках КТ8, КТ9, КТ10 должны быть как на рисунке ниже.
Дальнейшая настройка такая же как и в случае с использования тахогенератора.
Если используется обратная связь по напряжению якоря двигателя.
Как отмечалось выше, можно применить обратную связь по якорному напряжению, для этого собирается датчик якорного напряжения. Настройка блока управления производиться следующим образом.
 Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.
Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.Данный блок управления изготавливался для расточного станка. Вот фото этого монстра
На этом станке вышел из строя электромашинный усилитель, который и управлял двигателем постоянного тока перемещения стола.
Вот такой электромашинный усилитель.
Заместо него и делался данный блок управления.
Вот фото самого двигателя постоянного тока.
Блок управления был собран на изоляциоонном основани, где размещены все основные элементы.
Силовые диоды и тиристоры установлены на теплоотводы. Так же была сделана панель с разъемами, куда были выведены сигналы с контрольных точек схемы.
 Это делалось для удобство настройки и ремонта непосредственно на станке.
Это делалось для удобство настройки и ремонта непосредственно на станке.Вот смонтированный блок управления в силовом шкафу станка
На другой стороне силового шкафа был установлен маленький пульт управления.
На нем расположены:
-тумблер включения блока
-тумблер режима работы. Так как для установочных перемещений стола станка, точный контроль и стабилизация оборотов не нужны, то на это время цепь обратной связи шунтируется.
-ручки регулировки количества оборотов. Было поставлено два переменных резистора, один для грубой регулировки, второй — многооборотный — для точной установки нужных оборотов при черновой и чистовой расточке детали.
Кому интересно, ниже представлено видео работы станка. Сперва, показывается расточка отверстия в стальной плите толщиной 20мм. Потом показывается с какой частотой вращается винт подачи стола станка. С этой скорость подается деталь на резец, а такую частоту вращения подающего винта обеспечивает двигатель постоянного тока, для которого, собственно, все это и делалось.
Блок управления показал себя хорошо, сбоев и аварий не было.
Схемы и перечень элементов
Регистрация авторских прав и товарных знаков
The author of a work of science, literature and art is recognized as a citizen, creative work which it is created. Right holder – a Citizen or a legal entity possessing an exclusive
the right to the result of intellectual activity or the means
individualization (right holder), has the right to use such result or
such a means at its discretion, any not contrary to the law
way.
The right holder may dispose of the exclusive right to the result
intellectual activity or means of individualization (article 1233),
unless otherwise provided in this Code.
The author of a work of science, literature and art can only be physical the person, and the owner can be both physical, and legal entity.
If the owner is a natural person, the life of the author + 70 years after the death of, from 1 January of the year following the author’s death, the rights are inherited.
If the right holder is a legal entity, the term is reflected on the balance sheet of the enterprise useful life in accordance with PBU 14/2007, 17/02.
The author always retains non-exclusive, i.e. inalienable rights.
Блок управления двигателем постоянного тока 24 В 100 Вт 48 В 200 Вт ШИМ контроллер скорости двигателя постоянного тока контроллер управления вперед и назад 0 10 В/0 5 В|Контроллер двигателя|
 detail.1000023.i2.7e835d64HPwDnK”>
Контроллер двигателя постоянного тока 24В 10А ШИМ контроллер скорости двигателя постоянного тока вперед и назад
detail.1000023.i2.7e835d64HPwDnK”>
Контроллер двигателя постоянного тока 24В 10А ШИМ контроллер скорости двигателя постоянного тока вперед и назад
Модель: DC24/48RT10BL
Эта серия регуляторов скорости представляет собой четырехквадрантный регулятор скорости регенерации импульса низкого напряжения постоянного тока. Он принимает специальный однокристальный Интеллектуальный механизм управления и быстро реагирует, работает стабильно, работает надежно и имеет полные защитные функции и т. Д. Использует технологию SMT с модуляцией ширины импульса малого объема
Двигатель имеет небольшой шум, высокую эффективность, низкое техническое обслуживание, и он может улучшить срок службы двигателя постоянного тока лучше.
1. Модуль ширины импульса работает тише, с большей эффективностью и меньшим обслуживанием, более длительный срок службы. |
2. Технология SMT, малый размер Технология SMT, малый размер |
| 3.Низкий уровень шума во время эксплуатации, высокая эффективность и низкая стоимость обслуживания, которые лучше улучшают ОбслуживаниеСрок службы двигателя постоянного тока. |
4. Включить/тормоз/направление клеммыВыберите функцию, просто открыв или закрыв сухой контакт или через открытый коллекторный транзистор. |
5. Светодиоды состоянияСветодиоды питания и неисправности обеспечивают визуальное состояние накопителя. |
| 6. Вперед и назад можно установить отдельно Не нужен внешний контактор заднего хода и не приведет к частям электродвигателя или другим компонентамПерегрев или сжигание. |
| 7. Выходной ток может быть установлен |
| 8. Компенсация крутящего момента |
9. Стандартный аналоговый режим управления: аналоговый: 0-5 в или потенциометр |
10. Защита от перенапряжения и меньшего напряжения |
11. Привод сложит выходную мощность обратно, чтобы предотвратить перегрев. Диск будет неисправен, если он все еще остается |
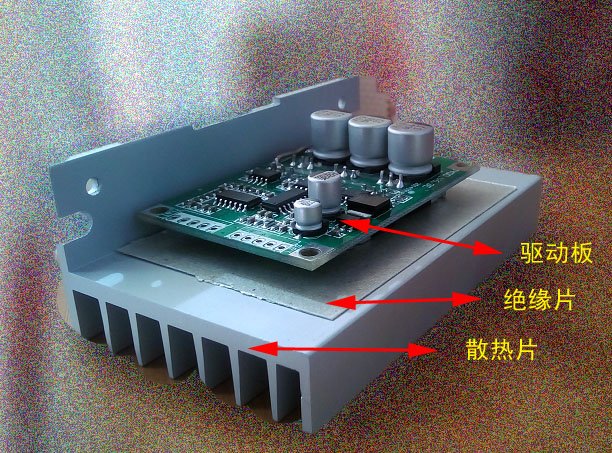
 Защита от перегрева
Защита от перегреваII. Индекс производительности
| Диапазон входного напряжения | DC24V |
| Максимальный выходной ток | 10A |
| Коэффициент скорости | 1:100 |
| Режим работы | Режим скорости |
| Способы управления | ШИМ, потенциометр |
| Защита | Аномальный ток, перегрев, перенапряжение, меньшее напряжение и короткое замыкание запустят функцию защиты. |
| Температурная защита | Когда температура 70, контроллер уменьшит выход из-за защиты от перегрева и остановит выход. |
| Рабочая температура | -10 — + 50 |
| Влажность окружающей среды | Относительная влажность менее 80RH |
| Размер | Д * Ш * В = 75*75*15 мм |
| Вес | 100 г |
Контроллеры электродвигателей постоянного тока, потенциометр электродвигателя, контроллер постоянного тока 12 В
Несмотря на то, что электродвигатели являются одной из самых старых конструкций электродвигателей, электродвигатели постоянного тока по-прежнему актуальны и регулярно используются в современной промышленности. Их управляемость является залогом их долговечности – даже самая простая машина может преобразовать постоянный ток в механическое вращение.
Их управляемость является залогом их долговечности – даже самая простая машина может преобразовать постоянный ток в механическое вращение.
Продолжение производства двигателей постоянного тока привело к производству контроллеров двигателей постоянного тока, которые часто имеют простую конструкцию, но обеспечивают отличную производительность. Если вы ищете программируемый контроллер двигателя для вашего приложения или проекта, вы найдете то, что вам нужно, здесь, в Allied Electronics.
Прочтите, чтобы узнать больше о контроллерах двигателей постоянного тока и их использовании.
Что такое контроллеры двигателей постоянного тока?
Контроллеры двигателей постоянного тока – это устройства, которые могут управлять положением, скоростью или крутящим моментом двигателя постоянного тока. Существует ряд контроллеров, от щеточных и бесщеточных до универсальных, каждый из которых позволяет оператору настраивать желаемое поведение двигателя с помощью своих механизмов.
Кривая крутящего момента двигателя постоянного тока обратно линейна, что означает, что их крутящий момент пропорционально уменьшается с увеличением числа оборотов двигателя.Это упрощает управление ими с помощью программируемого контроллера мотора, так как снижение их скорости увеличивает их крутящий момент, и наоборот.
Для чего используются контроллеры двигателей постоянного тока?
Благодаря функциональности контроллеров двигателей постоянного тока они идеально подходят для ряда приложений. Их часто можно увидеть в солнечных панелях или батареях благодаря их превосходной способности запускать высокий крутящий момент и управлять высокоинерционными нагрузками, их скорость намного легче контролировать по сравнению с двигателями переменного тока.
Если вы хотите изменить направление своего приложения или проекта, вам подойдут двигатели постоянного тока и программируемые контроллеры двигателей.В отличие от двигателей переменного тока, вы можете быстро и легко запускать и останавливать двигатели постоянного тока.
Почему стоит выбрать Allied Electronics для контроллеров двигателей постоянного тока?
Allied Electronics предлагает широкий выбор контроллеров двигателей постоянного тока, благодаря чему вы можете сузить область поиска до нужного вам типа. Функция поиска позволяет выполнять фильтрацию по таким параметрам, как фаза, стиль монтажа, номинальный ток и номинальное напряжение, поэтому вы можете легко использовать это, чтобы найти точное соответствие для работы, над которой вы работаете.
Мы являемся ведущим авторизованным дистрибьютором контроллеров двигателей постоянного тока 12 В и других программируемых контроллеров двигателей в Северной Америке. У нас есть товары ведущих производителей, включая Siemens, Arcus Technology, Carlo Gavazzi и Adafruit Industries. Выбирая Allied Electronics, вы инвестируете в надежный и долговечный продукт.
Если у вас возникнут какие-либо вопросы, наша команда всегда готова помочь, так почему бы не связаться с вами, и мы сможем помочь вам в выборе продуктов. Вы также можете найти совет в нашем центре содержания для экспертов.
Вы также можете найти совет в нашем центре содержания для экспертов.
Все о контроллерах двигателей постоянного тока
Двигатели постоянного тока по-прежнему актуальны в современной промышленности, даже несмотря на то, что они являются одними из старейших электродвигателей. Как они выдержали испытание временем, особенно против всех удивительных новых машин 21 века?
Есть много потенциальных ответов на этот вопрос, но их хорошая управляемость является основной причиной того, что двигатели постоянного тока сохранились. Эта простая машина преобразует постоянный ток в механическое вращение, которым можно управлять, просто изменяя входное напряжение или меняя местами его провода.Элегантность двигателей постоянного тока привела к производству многих контроллеров двигателей постоянного тока, которые часто имеют простую конструкцию и обеспечивают адекватную производительность при их стоимости. В этой статье мы рассмотрим некоторые распространенные контроллеры двигателей постоянного тока, как они работают, и обсудим, какие приложения наиболее популярны для этих систем.
Что такое контроллеры двигателей постоянного тока?
Проще говоря, контроллер двигателя постоянного тока – это любое устройство, которое может управлять положением, скоростью или крутящим моментом двигателя постоянного тока.Существуют контроллеры для щеточных двигателей постоянного тока, бесщеточных двигателей постоянного тока, а также универсальных двигателей, и все они позволяют операторам устанавливать желаемое поведение двигателя, даже если их механизмы для этого различаются.
Наши статьи о параллельных двигателях постоянного тока, двигателях постоянного тока с последовательной обмоткой и бесщеточных двигателях постоянного тока содержат подробные объяснения того, как работают машины постоянного тока. Подводя итог, можно сказать, что кривая скорость / крутящий момент двигателей постоянного тока обратно линейна, что означает, что их крутящий момент пропорционально уменьшается с увеличением числа оборотов двигателя.Это позволяет упростить управление, так как снижение скорости приведет к увеличению крутящего момента, и наоборот. Кроме того, в отличие от некоторых двигателей переменного тока, двигатели постоянного тока легко реверсировать, просто переключая их провода, так что постоянный ток течет в противоположном направлении. Контроллеры двигателей постоянного тока используют эти характеристики уникальным образом, и в этой статье будут рассмотрены наиболее популярные методы.
Кроме того, в отличие от некоторых двигателей переменного тока, двигатели постоянного тока легко реверсировать, просто переключая их провода, так что постоянный ток течет в противоположном направлении. Контроллеры двигателей постоянного тока используют эти характеристики уникальным образом, и в этой статье будут рассмотрены наиболее популярные методы.
Типы контроллеров двигателей постоянного тока
Ниже приведены некоторые распространенные методы управления двигателем постоянного тока. Обратите внимание, что эти методы не являются исчерпывающими и что двигателями постоянного тока можно управлять разными способами, включая контроллеры серводвигателей (подробнее см. В нашей статье о контроллерах серводвигателей):
Контроллер направления: H-мост
Н-мостовая схема – один из простейших методов управления двигателем постоянного тока.На рисунке 1 ниже показана упрощенная принципиальная схема H-моста:
Рисунок 1: Н-мостовая схема для управления направлением двигателя постоянного тока.
Четыре переключателя управляются парами (1 и 4, 2 и 3), и когда любая из этих пар замыкается, они замыкают цепь и приводят двигатель в действие. Следовательно, четырехквадрантный двигатель может быть создан путем соединения определенных переключателей вместе, при этом изменение полярности будет по-разному влиять на двигатель. По сути, эта схема переключает выводы двигателя постоянного тока, который по команде меняет направление вращения на обратное.Они легко продаются в виде микросхем и могут быть найдены в большинстве контроллеров на основе микропроцессоров, поскольку H-мост может быть уменьшен с помощью транзисторов до очень малых размеров.
Н-мосты не только могут изменять направление вращения двигателя, но также могут использоваться для регулирования скорости. Если требуется только направленное управление, тогда H-мост будет использоваться в качестве так называемого безрегенеративного привода постоянного тока. Однако создание рекуперативных приводов постоянного тока может быть усложнено. На рисунке 2 показан график, показывающий, как работают рекуперативные приводы:
Рис. 2: графики, представляющие направление скорости и крутящего момента при изменении полярности двигателя постоянного тока.Обратите внимание, как создается движение, когда они работают в одном направлении, и как достигается разрыв, когда они находятся в оппозиции.
Большинство двигателей постоянного тока замедляются за счет отключения питания двигателя; Рекуперативные приводы включают возможность торможения, когда переключение полярностей во время работы двигателя вызывает замедление. Квадранты 1 и 3 считаются «автомобильными» квадрантами, где двигатель обеспечивает ускорение в любом направлении, и это то, что контролируют нерегенеративные приводы.Квадранты 2 и 4 считаются «тормозными» квадрантами, в которых двигатель замедляется, и именно от них выигрывают рекуперативные приводы. Когда скорость двигателя противодействует крутящему моменту двигателя, двигатель становится генератором, в котором его механическая энергия направляет ток обратно к источнику питания (известное как «рекуперативное торможение»). Эта функция снижает потери энергии и может подзаряжать источник питания, эффективно увеличивая КПД двигателя. На рисунке 3 показана упрощенная принципиальная схема для каждого квадранта и показано, как квадранты 2 и 4 отправляют ток обратно в источник для регенерации энергии:
Рис. 3: Принципиальные схемы для каждого квадранта, показывающие значения напряжения двигателя и напряжения питания.Обратите внимание, как направление тока (I
a ) перемещается от двигателя к источнику питания в квадрантах 2 и 4.Когда двигатель замедляется, E a (напряжение, создаваемое / используемое двигателем) больше, чем напряжение питания (V a ), и ток будет течь обратно в источник питания. В настоящее время изучается регенеративное торможение в электромобилях и других приложениях, требующих максимальной эффективности. Этот метод не только обеспечивает управление двигателем постоянного тока, но также обеспечивает разумный способ снижения энергопотребления.
Регулятор скорости: широтно-импульсная модуляция (ШИМ)
PWM может использоваться во многих типах двигателей, как показано в нашей статье о контроллерах двигателей переменного тока. По сути, схемы ШИМ изменяют скорость двигателя, моделируя уменьшение / увеличение напряжения питания. Контроллеры привода с регулируемой скоростью отправляют на двигатель периодические импульсы, которые в сочетании с эффектом сглаживания, вызванным индуктивностью катушки, заставляют двигатель работать так, как будто он питается от более низкого / более высокого напряжения. Например, если на двигатель 12 В подается сигнал ШИМ, высокий (12 В) в течение двух третей каждого периода и низкий (0 В) в остальное время, двигатель будет эффективно работать при двух третях полного напряжения, или 8 В.Следовательно, процент снижения напряжения или «рабочий цикл» ШИМ изменяет скорость двигателя. ШИМ легко и недорого реализовать, и можно выбрать практически любой рабочий цикл, что позволяет практически непрерывно контролировать скорость двигателя. ШИМ часто сочетается с Н-мостами, чтобы обеспечить управление скоростью, направлением и торможением.
Контроллер якоря: переменное сопротивление
Другой способ повлиять на скорость двигателя постоянного тока – это изменить ток, протекающий через катушку возбуждения или через якорь.Скорость выходного вала изменится при изменении тока через эти катушки, так как его скорость пропорциональна силе магнитного поля якоря (продиктованного током). Переменные резисторы или реостаты, включенные последовательно с этими катушками, могут использоваться для изменения тока и, следовательно, скорости. Пользователи могут увеличивать сопротивление катушки якоря, чтобы уменьшить скорость, или увеличивать сопротивление статора, чтобы увеличить его, и все это путем регулирования сопротивления. Обратите внимание, что этот метод приводит к неэффективности двигателя, поскольку увеличение сопротивления означает потерю большего количества энергии на тепло, и именно поэтому ШИМ является предпочтительным типом контроллера двигателя постоянного тока.
Заявки и критерии отбора
При рассмотрении вопроса о покупке контроллера двигателя постоянного тока есть несколько ключевых вопросов, на которые следует ответить либо вашему исследованию, либо поставщику. Контроллеры двигателей постоянного тока сложно указать из-за их разнообразия, поэтому приведенный ниже список вопросов станет надежным инструментом при выборе контроллера для вашего проекта. Обязательно найдите самую последнюю информацию о новейших доступных технологиях, связавшись с вашим поставщиком, и используйте эти вопросы, чтобы сделать осознанный выбор:
- Каков номинальный диапазон напряжения используемого двигателя и какие части этого диапазона он будет использовать?
- Какой тип управления желателен (скорость, крутящий момент, направление или все три)?
- Какой тип двигателя контролируется?
- Какой длительный ток может подавать контроллер и соответствует ли он длительному потреблению тока двигателем под нагрузкой?
- Есть ли в системе встроенная максимальная токовая / тепловая защита?
- Какой будет метод управления при использовании микропроцессорных приводов (ШИМ, ПДУ, аналоговое напряжение и т. Д.))? Программное обеспечение необходимо?
- Вам нужен контроллер с двумя двигателями (один контроллер для двух независимых двигателей)?
Контроллеров двигателей постоянного тока доступно столько же, сколько самих двигателей постоянного тока; их изменчивость – одно из их самых сильных преимуществ. Их приложения также многочисленны, поскольку большинство разработчиков извлекают выгоду из какого-либо пользовательского ввода в их двигатель постоянного тока. В сферах робототехники, производства, военных приложений, автомобилей и многих других используются контроллеры двигателей постоянного тока с отличными результатами.В зависимости от того, как они используются, контроллеры двигателей постоянного тока могут предоставить простые средства управления с хорошей точностью по приемлемой цене.
Сводка
В этой статье представлено понимание того, что такое контроллеры двигателей постоянного тока и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- http: // srjcstaff.santarosa.edu/~lwillia2/2B/2Bch30.pdf
- https://itp.nyu.edu/physcomp/lessons/dc-motors/dc-motors-the-basics/
- https://www.ece.uvic.ca
- https://www.tigoe.com/pcomp/code/circuits/motors/controlling-dc-motors/
- https://www.elprocus.com/what-are-the-best-ways-to-control-the-speed-of-dc-motor/
- https://www.robotshop.com/community/tutorials/show/how-to-make-a-robot-lesson-5-choosing-a-motor-controller
Прочие изделия для двигателей
Больше от Instruments & Controls
Pololu – Матовые контроллеры двигателей постоянного тока
В таблице ниже показаны основные характеристики и технические характеристики наших контроллеров двигателей.Вы можете выбрать семейство продуктов из таблицы или прокрутить вниз для получения дополнительной информации.
1 Контроллеры двигателей TReX имеют два двунаправленных канала и один вспомогательный однонаправленный канал.
2 Конкретные диапазоны напряжения и тока см. На страницах отдельных продуктов.
3 Просмотрите страницы отдельных продуктов, чтобы узнать, какие именно контроллеры имеют корпуса.
Сравнить все товары в этой категории
Подкатегории
Простые контроллеры двигателей (SMC) Pololu упрощают базовое управление щеточными двигателями постоянного тока.Наши самые универсальные и настраиваемые контроллеры двигателей, охватывающие широкий диапазон уровней мощности и предлагающие четыре режима интерфейса: USB, последовательный TTL, аналоговое напряжение и радиоуправление (RC).
Контроллеры электродвигателей Jrk – это контроллеры электродвигателей постоянного тока с широкими возможностями настройки, которые можно использовать для управления скоростью без обратной связи или для управления скоростью или положением с обратной связью. Они поддерживают различные режимы интерфейса, включая USB, последовательный TTL, аналоговое напряжение и радиоуправление (RC).
Контроллеры двигателей RoboClaw от Basicmicro (ранее называвшиеся Ion Motion Control) могут управлять одним или двумя щеточными двигателями постоянного тока, используя последовательный порт USB, последовательный TTL, RC или аналоговые входы. Интегрированные двойные квадратурные декодеры упрощают создание замкнутой системы управления скоростью, или аналоговая обратная связь может использоваться для управления положением.
Мощные контроллеры двигателей MCP от Basicmicro (ранее Ion Motion Control) могут управлять парой щеточных двигателей постоянного тока с помощью последовательного порта USB, последовательного порта TTL, последовательного порта RS-232, шины CAN, RC или аналоговых входов.Они включают в себя интегрированные двойные квадратурные декодеры и расширенные функции, включая поддержку внутренних сценариев и настраиваемый пользователем ввод / вывод.
Эти контроллеры двигателей позволяют регулировать скорость и направление двух щеточных двигателей постоянного тока с помощью простого последовательного интерфейса, что упрощает добавление двигателей в ваш микроконтроллерный или компьютерный проект.
TReX сочетает в себе RC, аналоговые и последовательные входы для создания мощного решения для управления двигателем. TReX будет работать прямо из коробки в качестве электронного регулятора скорости (ESC), но его способность плавно переключаться между RC / аналоговым и последовательным управлением делает его способным на гораздо большее!
7 фактов о контроллере двигателя постоянного тока
Что такое контроллер двигателя постоянного тока?
Контроллер двигателя постоянного тока (постоянный ток) – это особый тип электрического устройства, которое преобразует электрическую энергию в механическую.Двигатели постоянного тока получают электроэнергию, используя постоянный ток, а затем преобразуют эту энергию в автоматическое вращение.
Двигатели постоянного тока есть почти везде. Они используют магнитное поле, создаваемое генерируемым током. Эти токи являются токами, которые приводят в движение ротор, закрепленный на выходном валу. Скорость и выходной крутящий момент зависят как от конструкции двигателя, так и от входной мощности.
Как работает контроллер двигателя постоянного тока?
Двигатели постоянного токаразличаются по мощности и размеру.Вы можете найти значительные механизмы, используемые для подъема подъемников и лифтов, механических транспортных средств, к маленьким, найденным в игрушках. Но опять же, как работает двигатель постоянного тока? Двигатели постоянного тока состоят из двух основных частей: якоря и статора. Статор – это постоянная часть двигателя, а якорь – это вращающаяся часть.
В двигателе постоянного тока используются стационарные наборы магнитов, установленных в статоре, в дополнение к катушке с проводом. В петле из проволоки протекает ток, который создает выровненное электромагнитное поле.Одна или несколько обмоток изолированного провода наматываются вокруг сердечника двигателя с целью концентрации магнитного поля.
Обмотки изолированного провода подключаются к поворотному электрическому переключателю (коммутатору), который подает электрический ток на обмотки катушки. Вращающийся электрический переключатель позволяет каждой катушке якоря запитаться, создавая крутящий момент или постоянную вращающую силу.
При последовательном включении и выключении катушек создается магнитное поле, которое взаимодействует с различными участками неподвижных магнитов, создавая крутящий момент.Эти фундаментальные принципы работы позволяют двигателям постоянного тока преобразовывать электрическую энергию постоянного тока в механическую, которую можно использовать для силового оборудования. Все это за счет вращательного движения.
Кто изобрел контроллер двигателя постоянного тока?
Двигатель постоянного тока – это выдающееся электрическое устройство, которое произвело революцию в жизни людей во многих отношениях. Но кто был изобретателем двигателя постоянного тока? Как и во всех остальных нововведениях, есть множество людей, которые сыграли свою роль в разработке другого оборудования.
В США Томас Давенпорт был изобретателем первого электродвигателя. Давенпорт был первым человеком, который пошел дальше и подал заявку на патент на пригодный для использования электродвигатель. Это было еще в 1837 году. Однако Давенпорт не был первым человеком, который построил электродвигатель, поскольку другие изобретатели в Европе разработали более мощную версию ранее.
Причина, по которой он хвалил Давенпорта как первого изобретателя, заключается в том, что он ранее подал заявку на патент. В 1834 году Якоби Мориц уже представил очень мощный двигатель (в три раза более мощный), чем у Давенпорта.Год спустя Сибрандус Стратинг и Кристофер Беккер продемонстрировали практическое применение электродвигателя.
Типы контроллеров двигателей постоянного тока и управления двигателями постоянного тока
Стоит знать несколько типов двигателей постоянного тока. До сих пор в этом руководстве подробно объяснялось, что такое двигатели постоянного тока, их функции и история. На этом этапе мы рассмотрим типы двигателей постоянного тока. Короче говоря, существует четыре основных типа двигателей постоянного тока, как показано ниже:
Бесщеточные двигатели постоянного тока
Они также называются синхронными двигателями постоянного тока или двигателями с электронной коммутацией.Основное отличие этих типов двигателей от остальных в том, что в них отсутствует коммутатор. Однако его заменяет сервомеханизм, который может определять и впоследствии регулировать угол поворота ротора. Бесщеточные двигатели постоянного тока долговечны и безопасны.
Щеточные двигатели постоянного тока
Это оригинальные двигатели постоянного тока, разработанные компанией Sprague. Хотя они остаются популярными для бумагоделательных машин, кранов и прокатных станов, в последнее время их популярность уменьшается.
Параллельные двигатели постоянного тока
Это тип щеточных двигателей с подключением обмоток возбуждения параллельно якорю.У них меньший ток за счет параллельности обмоток. Шунтовые двигатели находят широкое применение в нескольких приложениях, где требуется постоянный крутящий момент. Больше всего от них полагаются смесители, конвейерные ленты и подъемники.
Двигатели постоянного тока серииЭто последняя разновидность. Последовательное соединение обмоток возбуждения отличает их от параллельных двигателей. Следовательно, это означает, что ток якоря действительно проходит через обмотку возбуждения, создавая гораздо более высокие скорости. Серийные двигатели постоянного тока идеально подходят для задач, требующих высокого пускового момента.
Наиболее распространенные методы управления двигателем постоянного тока:
Регулятор направления: H-мост
H мостовая схема является одним из простейших способов управления двигателем постоянного тока. Здесь вы найдете четыре переключателя, управляемых попарно. Когда любая из этих пар замыкается, они немедленно замыкают цепь и впоследствии приводят в действие двигатель. H-мост также может контролировать скорость.
Регулятор скорости: широтно-импульсная модуляция (ШИМ)
ЦепиШИМ изменяют скорость двигателя, моделируя увеличение или уменьшение напряжения питания.ШИМ легко и недорого применять, аспект, который позволяет непрерывно контролировать скорость двигателя. Здесь вы найдете контроллеры привода с регулируемой скоростью, которые работают, отправляя на двигатель периодические импульсы. Когда индуктивность катушки с использованием обычного импульса дает некоторый эффект сглаживания привязки, электродвигатель работает как от высокого или низкого напряжения.
Контроллер якоря: переменное сопротивление
Это еще один способ воздействия на скорость двигателя постоянного тока. Здесь изменяется ток, протекающий через якорь или катушку возбуждения.Если вам интересно, вы заметите, что скорость выходного вала изменяется при изменении тока катушек. Переменные резисторы могут изменять ток, чтобы вы могли увеличить скорость.
Что нужно знать при покупке двигателей постоянного тока
Купить двигатели постоянного тока очень просто. Все, что вам нужно сделать, это найти своего поставщика, заключить сделку, заплатить за нее и забрать товар, верно? Если вы так думаете, то ошибаетесь. Перед покупкой двигателей постоянного тока необходимо учесть несколько важных моментов.Вот несколько важных факторов, которые следует учитывать:
НапряжениеЧем выше энергия, тем выше крутящий момент. Энергия поддерживает чистый ток в одном направлении. Обязательно проверьте рекомендованное натяжение двигателя постоянного тока в инструкции по эксплуатации. Если таковой не хватает, отправляйтесь в другое место.
Текущий
Ток питает двигатель, и слишком большая его часть опасна, так как может повредить двигатель. Перед покупкой убедитесь, что вы знаете рабочий ток и ток остановки вашего контроллера двигателя постоянного тока.
Скорость
Скорость несколько сложна, когда дело касается двигателей. Двигатели эффективно работают на высоких скоростях, но это невозможно при необходимости переключения передач. Добавление передач не ограничивает эффективность двигателя. Следовательно, вам нужно также учитывать снижение крутящего момента и скорости.
Материал печатной платы в них
Тип материала печатной платы, используемого при производстве двигателей постоянного тока, имеет значение. Выбор двигателей постоянного тока, состоящих из печатных плат из некачественных материалов, сопряжен с риском для управления двигателями постоянного тока.
Почему выбирают двигатель постоянного тока?
Хотя у вас есть возможность использовать двигатели переменного тока, настоятельно рекомендуется использовать двигатель постоянного тока в качестве первого выбора. Но почему, спросите вы. Двигатели постоянного тока обладают рядом преимуществ по сравнению с двигателями переменного тока. Например, они отлично подходят, когда вам нужен высокий пусковой крутящий момент, направленный на движение высокоинерционных нагрузок. Кроме того, в отличие от двигателей переменного тока, легко контролировать скорость двигателей постоянного тока.
Двигатели постоянного токатакже идеальны, когда им требуется питание от источников постоянного тока низкого напряжения, таких как солнечные панели или аккумулятор.Если вы хотите быстро изменить направление вращения, вы найдете двигатели постоянного тока, идеально подходящие для ваших приложений. В отличие от двигателей переменного тока, вы можете быстро и легко запускать и останавливать двигатели постоянного тока.
Области применения контроллера двигателя постоянного тока
Поскольку сейчас на рынке представлены различные двигатели постоянного тока, мы широко их используем. Дома двигатели постоянного тока находят применение в игрушках, инструментах и другой бытовой технике. В промышленном секторе их требования включают в себя переходы от поворотных столов к конвейерам и реверсирование, чтобы упомянуть лишь некоторые из них.Ниже приведены лишь некоторые области применения контроллеров двигателей постоянного тока:
Для насосов
Двигатели постоянного токаиспользуются для приведения в действие насосов благодаря их отличной реакции при движении и легкости регулирования скорости.
В вентиляторах
Им отдают предпочтение вентиляторы из-за их энергосберегающего механизма.
Для игрушек
При большом разнообразии напряжений игрушки с двигателем постоянного тока требуют различных типов движения и скорости.
Для электромобилей
Двигатели постоянного тока, предназначенные для электромобилей, предпочтительнее из-за их долговечности и энергоэффективности.
Для электровелосипедов
Электровелосипеды имеют двигатели постоянного тока, расположенные в ступицах заднего и переднего колеса, чтобы обеспечить требуемые уровни мощности и крутящего момента.
Сводка
Без сомнения, не будет конца и конца тому, когда прекратится использование контроллеров двигателей постоянного тока. Они продолжают находить применение в нескольких приложениях, несмотря на жесткую конкуренцию со стороны современных и интеллектуальных устройств. На рынке представлены четыре типа двигателей постоянного тока. Все они содержат печатные платы.Без печатных плат контроллеры двигателей постоянного тока не будут работать должным образом. Печатные платы являются сердцем контроллеров двигателей постоянного тока.
Вы ищете лучшие печатные платы для контроллеров двигателей постоянного тока? Не смотрите дальше, чем произведенные WellPCB. У нас есть одни из лучших на рынке печатных плат для контроллеров двигателей постоянного тока. Позвоните нам сегодня, чтобы узнать, как мы можем вам помочь.
Одноканальные контроллеры двигателей постоянного токаОдноканальные контроллеры двигателей постоянного тока
– Robot Gear Australia– Веб-сайт Robot Gear лучше всего работает с включенными Javascript и файлами cookie –
- Дом
- Контроллеры двигателей
- Один канал
Управляйте одним щеточным двигателем постоянного тока с помощью этих контроллеров двигателей.Доступны различные размеры для питания щеточных двигателей постоянного тока малого и среднего размера. Возможности могут включать управление полной скоростью и направлением с поддержкой обратной связи и встроенным ПИД-регулированием.
Взаимодействие с контроллерами может быть выполнено с помощью таких методов, как USB, последовательный TTL, аналоговый сигнал или сигналы радиоуправления.
Контроллер скорости двигателя постоянного тока / ШИМ-контроллер 150 Вт, 6-30 В
Артикул: MCU-060249.
Это устройство идеально подходит для управления скоростью одного щеточного двигателя постоянного тока, освещения, вентиляторов, нагревателей и других низковольтных устройств постоянного тока.Используя широтно-импульсную модуляцию, контроллер обеспечивает эффективное питание устройств с небольшими тепловыми потерями. Только в одном направлении, программирование или пайка не требуется. Полностью собран. Подробнее …
Контроллер скорости двигателя постоянного тока / ШИМ-контроллер 720 Вт, 6-90 В, 8 А
Артикул: MCU-060250.
Этот блок идеально подходит для управления скоростью одного большого щеточного двигателя постоянного тока, освещения, вентиляторов, нагревателей и других низковольтных устройств постоянного тока.Используя широтно-импульсную модуляцию, контроллер обеспечивает эффективное питание устройств с небольшими тепловыми потерями. Только в одном направлении, программирование или пайка не требуется. Полностью как … Подробнее …
Мощный простой контроллер двигателя G2 18v15
Артикул: SKU-005127.
Этот мощный контроллер двигателя упрощает базовое управление щеточным двигателем постоянного тока с быстрой настройкой через USB с помощью нашего бесплатного программного обеспечения.Он поддерживает пять интерфейсов управления: USB, последовательный TTL, I²C, аналоговое напряжение (потенциометр) и радиоуправление (RC). Подробнее …
Мощный простой контроллер двигателя G2 18v25
Артикул: SKU-005130.
Этот мощный контроллер двигателя упрощает базовое управление щеточным двигателем постоянного тока с быстрой настройкой через USB с помощью нашего бесплатного программного обеспечения.Он поддерживает пять интерфейсов управления: USB, последовательный TTL, I²C, аналоговое напряжение (потенциометр) и радиоуправление (RC). Подробнее …
Мощный простой контроллер двигателя G2 24v12
Артикул: SKU-005129.
Этот мощный контроллер двигателя упрощает базовое управление щеточным двигателем постоянного тока с быстрой настройкой через USB с помощью нашего бесплатного программного обеспечения.Он поддерживает пять интерфейсов управления: USB, последовательный TTL, I²C, аналоговое напряжение (потенциометр) и радиоуправление (RC). Подробнее …
Мощный простой контроллер двигателя G2 24v19
Артикул: SKU-005131.
Этот мощный контроллер двигателя упрощает базовое управление щеточным двигателем постоянного тока с быстрой настройкой через USB с помощью нашего бесплатного программного обеспечения.Он поддерживает пять интерфейсов управления: USB, последовательный TTL, I²C, аналоговое напряжение (потенциометр) и радиоуправление (RC). Подробнее …
Авторские права © 2009 Robot Gear. Веб-сайт от PCSПроизошла ошибка
Повторите попытку позже или попробуйте нашу домашнюю страницу еще раз.
Bitte versuchen Sie es später oder schauen Sie ob die Homepage funktioniert.
Ошибка: E1020
Австралия Электронная почта
Максон Мотор Австралия Пти Лтд
Unit 1, 12-14 Beaumont Road
Гора Куринг-Гай Новый Южный Уэльс 2080
Австралия
Benelux Электронная почта
maxon motor benelux B.V.
Йосинк Колквег 38
7545 PR Enschede
Нидерланды
Китай Электронная почта
Максон Мотор (Сучжоу) Ко., Лтд
江兴东 路 1128 号 1 号楼 5 楼
215200 江苏 吴江
中
Германия Электронная почта
Максон Мотор ГмбХ
Truderinger Str. 210
81825 München
Deutschland
Индия Электронная почта
maxon precision motor India Pvt.ООО
Niran Arcade, № 563/564
Новая Бел Роад,
RMV 2-я ступень
Бангалор – 560 094
Индия
Италия Электронная почта
maxon motor italia S.r.l.
Società Unipersonale
Via Sirtori 35
20017 Rho MI
Италия
Япония Электронная почта
マ ク ソ ン ジ ャ パ ン 株式会社
東京 都 新宿 区 新宿 5-1-15
〒 160-0022
日本
Корея Электронная почта
㈜ 맥슨 모터 코리아
서울시 서초구
반포 대로 14 길 27, 한국 137-876
Португалия Электронная почта
maxon motor ibérica s.
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Швейцария Электронная почта
максон мотор аг
Брюнигштрассе 220
Постфах 263
6072 Sachseln
Schweiz
Испания Электронная почта
maxon motor ibérica s.a. Испания (Барселона)
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Тайвань Электронная почта
maxon motor Тайвань
8F.-8 №16, переулок 609 сек. 5
П. 5, Chongxin Rd.
Sanchong Dist.
Нью-Тайбэй 241
臺灣
Великобритания, Ирландия Эл. Почта
максон мотор великобритания, лтд
Maxon House, Хогвуд-лейн,
Finchampstead
Беркшир, RG40 4QW
Соединенное Королевство
США (Восточное побережье) Электронная почта
прецизионные двигатели maxon, inc.
125 Девер Драйв
Тонтон, Массачусетс 02780
США
США (Западное побережье) Электронная почта
прецизионные двигатели maxon, inc.
1065 East Hillsdale Blvd,
Люкс 210
Фостер-Сити, Калифорния 94404
США
(PDF) Проектирование и разработка универсального блока управления двигателем с использованием MATLAB и Arduino
Проектирование и разработка универсального блока управления двигателем с использованием MATLAB и Arduino
(IJSRD / Conf / ETCO2017 / 2017/019)
7) Он запитан с помощью электроэнергии, которая является экологически чистым и дешевым источником энергии.
VII. ПРИМЕНЕНИЕ
Системы моторных приводов могут широко использоваться в большом количестве промышленных и бытовых приложений, таких как фабрики, транспорт
Системы, текстильные фабрики, вентиляторы, насосы, двигатели, роботы, светодиодные и лампы накаливания, автомобильные приложения, аудиовизуальное оборудование
, Периферийные устройства для ПК, Автомобильные аудиосистемы, Автомобильные навигационные системы и т. Д.
Приводы также используются в качестве первичных двигателей для дизельных или бензиновых двигателей, газовых или паровых турбин, гидравлических двигателей и электродвигателей
.
Этот привод служит для различных приводов двигателей и, таким образом, может использоваться для множества приложений, включая
в образовательных и лабораторных испытаниях.
VIII. ЗАКЛЮЧЕНИЕ
Из исследования можно сделать вывод, что этот привод может управлять разными двигателями, то есть двумя двигателями постоянного тока и одним двигателем переменного тока, используя один аппаратный привод
. Этот привод на самом деле прост в эксплуатации и имеет разные режимы работы. Он управляет двигателями, и
можно управлять вручную с помощью графического интерфейса MATLAB и по беспроводной связи с помощью Bluetooth на платформе Android.Использование Bluetooth для работы с
легко для понимания пользователем и обеспечивает наиболее удобное беспроводное обслуживание привода. Это энергоэффективный
и совместимый. Он может работать в различных атмосферных условиях. Он наиболее полезен для малобюджетных запусков и служит надежным оборудованием
для мгновенного управления различными наборами двигателей, их направлением и скоростью.
СПРАВОЧНЫЕ МАТЕРИАЛЫ
[1] П. Парих, Р. Васани и С. Шет, “Анализ скорости двигателя с щеточным датчиком постоянного тока с использованием алгоритма Циглера-Николса:
Случай автоматизированного управляемого транспортного средства”, Indian Journal of Наука и технологии 9.38 (2016).
[2] П. Парих, С. Шет и Т. Патель, “Позиционный анализ двигателя с щеточным датчиком постоянного тока с использованием алгоритма Циглера-Николса”,
CAD / CAM, Робототехника и заводы будущего. Springer India, 2016. 637-650.
[3] С. Махерия, П.Парих, «Обзор: моделирование щеточного двигателя постоянного тока и различные методы управления», журнал
для исследований | Том 1.12 (2016).
[4] П. Парих, Н. Моди и Р. Праджапати, «Управление промышленными пневматическими и гидравлическими системами с использованием последовательной связи.
Technology & Matlab.”
[5] П. Парих, К. Джоши и С. Шет,” Автомобиль с цветным наведением – интеллектуальная мехатронная система для обработки материалов “,
Труды 1-й Международной и 16-й национальных конференций по машинам и механизмам (iNaCoMM 2013 ), IIT
Roorkee, India. 2013.
[6] Парик П., Шах Х. и Шет С. «Мехатронная конструкция робота-следящего за линией с использованием техники управления Циглера Николса для контроллеров
P, PI и PID , »Международный машиностроительный конгресс (IMEC-2014), 13-15 июня 2014 г.
