
Драйверы от TI: Управляй любым электродвигателем
26 мая 2016
В ассортименте полупроводниковых компонентов производства компании Texas Instruments широко представлены микросхемы драйверов для управления всеми типами электродвигателей, которые, совершенствуясь, находят все более широкое применение в самом различном оборудовании. Компания предлагает решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных, бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.
Электродвигатели находят широчайшее применение в современном высокотехнологическом укладе жизни. Этот тип электромеханического привода по-прежнему является одним из наиболее распространенных и востребованных. Электродвигатели самого разного назначения являются одной из основных составляющих любого производства, повсеместно используются в офисной и домашней технике, в системах мониторинга и управления зданий и объектов.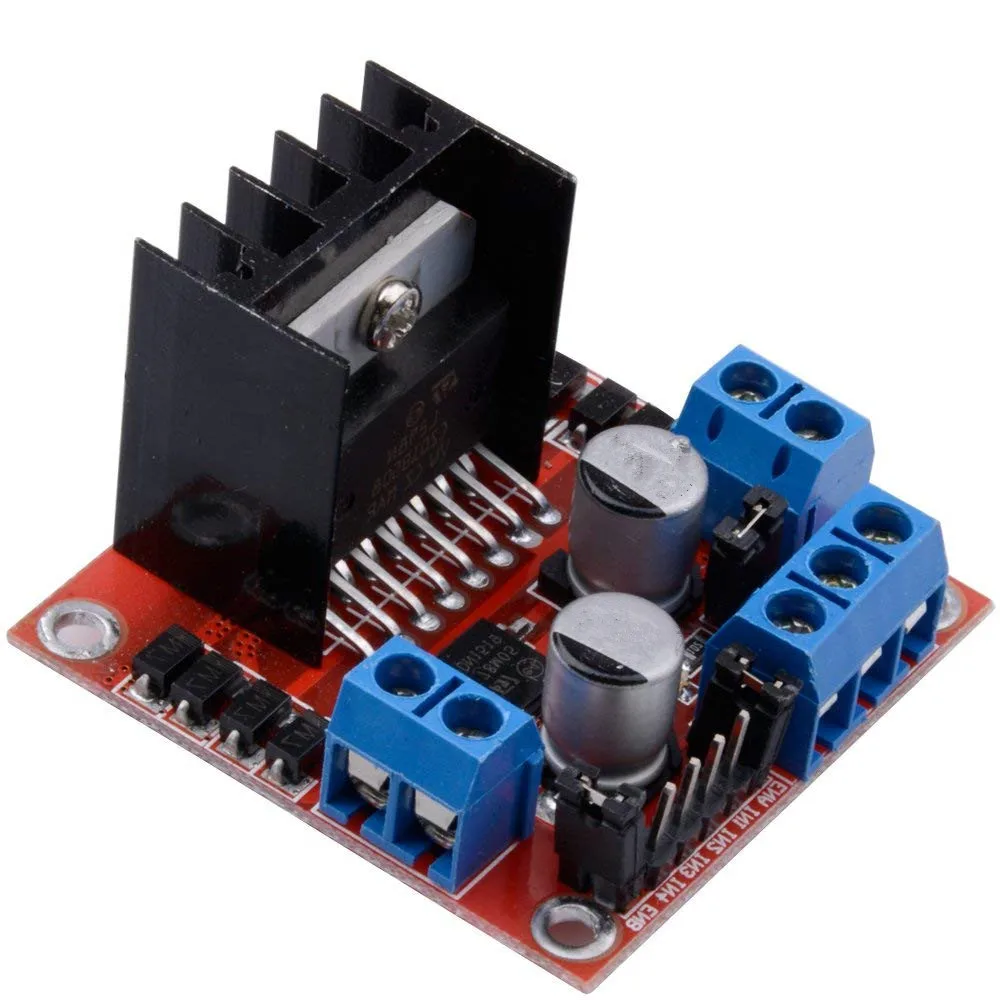
С развитием технологий традиционные двигатели совершенствуются и находят все новые области применения. Современные высокоточные станки и робототехника немыслимы без электродвигателей с интеллектуальными системами управления. На земле, в воздухе и под водой электродвигатели остаются широко востребованным преобразователем электрической энергии в механическую.
Типы электродвигателей, способы управления и возникающие сложности
Впервые созданный в 1834 году русским ученым Якоби преобразователь электрической энергии во вращательное движение получил название электродвигатель. С тех пор он был серьезно усовершенствован – появилось множество новых вариантов, но использованные при его создании принципы электромагнетизма по-прежнему являются основой всех модификаций современных электродвигателей.
Проводник с проходящим по нему током (рисунок 1) создает вокруг себя магнитное поле, интенсивность (магнитная индукция) которого пропорциональна количеству витков, в случае использования катушки (N), и величине проходящего по ней тока (I), где, В – вектор магнитной индукции, К – магнитная постоянная, N – число витков, I – сила тока.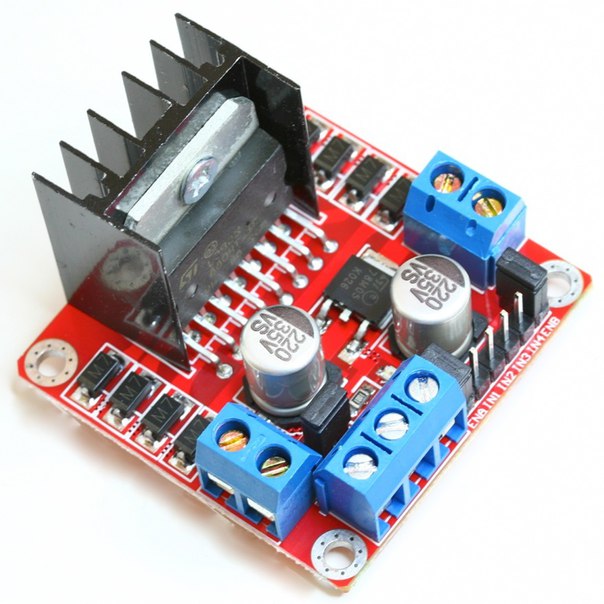
Рис. 1. Электромагнетизм в основе работы электродвигателя
Изменение направления тока влияет и на направление магнитного поля проводника.
При этом на помещенный во внешнее магнитное поле проводник с током действует сила Лоренца, вызывающая его вращательное перемещение. Направление вращения легко определяется с помощью известного правила правой руки для проводника с током в магнитном поле (рисунок 2). Сила (F), действующая на проводник в магнитном поле, равна произведению силы тока (I) в проводнике на вектор магнитной индукции поля (B) и длину проводника (L). F = LIB.
Рис. 2. Перемещение проводника с током в магнитном поле (Сила Лоренца)
Коллекторные двигатели
Коллекторные двигатели постоянного тока (Brushed DC или BDC, по терминологии TI) сегодня относятся к одним из наиболее распространенных механизмов электромагнитного вращения.
В магнитном поле собранного из постоянных магнитов статора вращается многосекционный ротор с катушками, которые попарно и попеременно подключаются через коммутируемые коллекторные ламели на оси ротора (рисунок 3).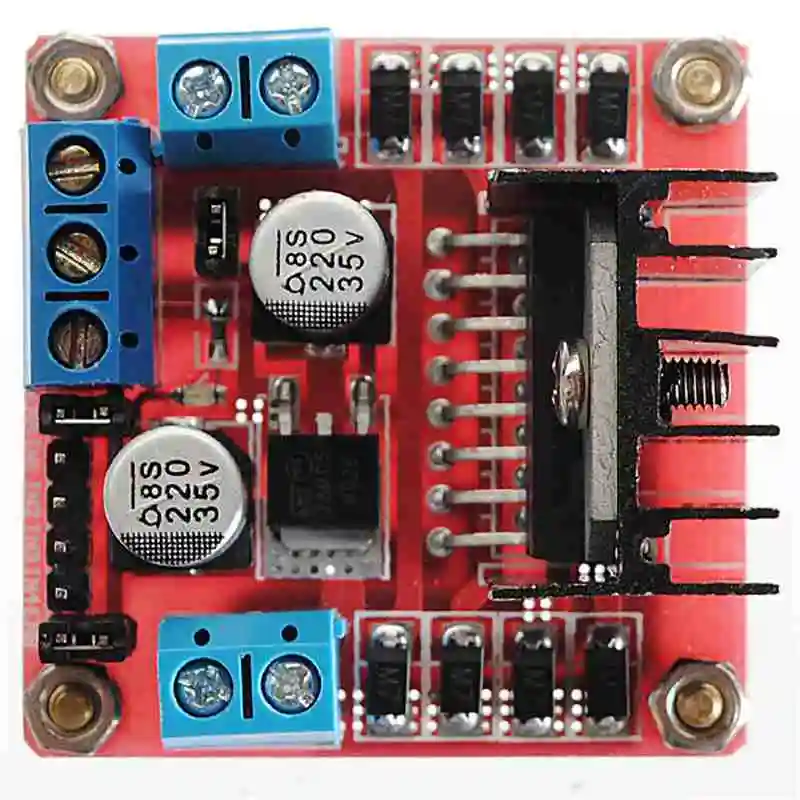 Выбор пары активируемых катушек выполняется на основании закона Лоренца в соответствии с правилом Буравчика. Источник тока всегда подключен к катушкам, силовые линии магнитного поля которых смещены на угол, близкий к 90°, относительно магнитного поля статора.
Выбор пары активируемых катушек выполняется на основании закона Лоренца в соответствии с правилом Буравчика. Источник тока всегда подключен к катушкам, силовые линии магнитного поля которых смещены на угол, близкий к 90°, относительно магнитного поля статора.
Рис. 3. Принцип действия коллекторного электродвигателя (BDC)
Электродвигатели подобного типа часто используют статор с постоянными магнитами. Они позволяют легко регулировать скорость вращения и отличаются невысокой стоимостью.
Также широко используется вариант 2-обмоточного электродвигателя подобного типа, но со статорной обмоткой вместо постоянного магнита. Такие модели обладают большим пусковым моментом и могут работать не только на постоянном, но и на переменном токе. Электродвигатели подобного типа почти повсеместно используются в различной бытовой технике.
К недостаткам этой конструкции BDC стоит отнести износ щеточно-коллекторного узла в процессе эксплуатации. Кроме того, из-за искрообразования при коммутации отдельных обмоток ротора отмечается повышенный уровень электромагнитных помех, что не позволяет использовать такие двигатели во взрывоопасных средах.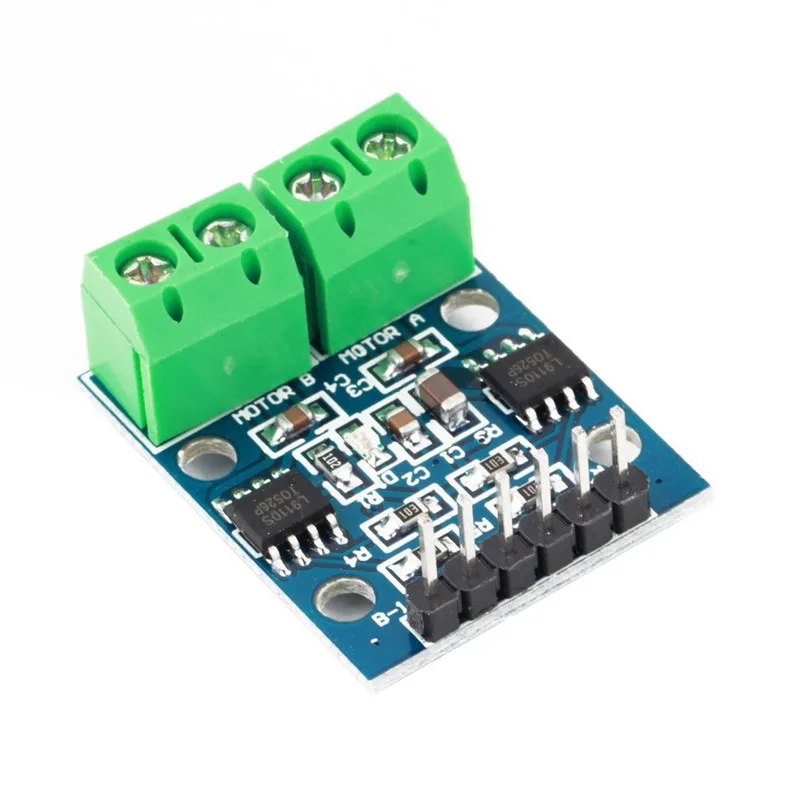
Особенностью двигателей BDC также является повышенный нагрев ротора, охлаждение которого затруднено в силу конструктивных особенностей двигателя.
Достоинства коллекторных двигателей:
- малая стоимость;
- простая система управления;
- 2-обмоточные коллекторные двигатели, обладающие высоким крутящим моментом и способные работать на постоянном и переменном токе.
Особенности эксплуатации коллекторных двигателей:
- щетки требуют периодического обслуживания, понижают надежность двигателя;
- в процессе коммутации возникают электрические искры и электромагнитные помехи;
- затруднен отвод тепла от перегревающегося ротора.
Бесколлекторные двигатели
Несколько менее распространенными среди двигателей постоянного тока являются модели с бесщеточной конструкцией (BrushLess DC или BLDC), использующие ротор с постоянными магнитами, которые вращаются между электромагнитами статора (рисунок 4).
Рис. 4. Принцип действия бесколлекторного электродвигателя (BLDC)
Текущее положение ротора обычно контролируется энкодерами или датчиком на основе эффекта Холла, либо применяется технология с измерением напряжения противо-ЭДС на обмотках без использования в этом случае отдельного датчика положения ротора (SensorLess).
Коммутация тока обмоток статора выполняется с помощью электронных ключей (вентилей). Именно поэтому бесколлекторные двигатели BLDC часто называют «вентильными». Очередность подключения пары обмоток двигателя происходит в зависимости от текущего положения ротора.
Принцип работы BLDC основан на том, что контроллер коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был сдвинут на угол, близкий к 90° или -90° относительно вектора магнитного поля ротора. Вращающееся при переключении магнитное поле заставляет перемещаться вслед за ним ротор с постоянными магнитами.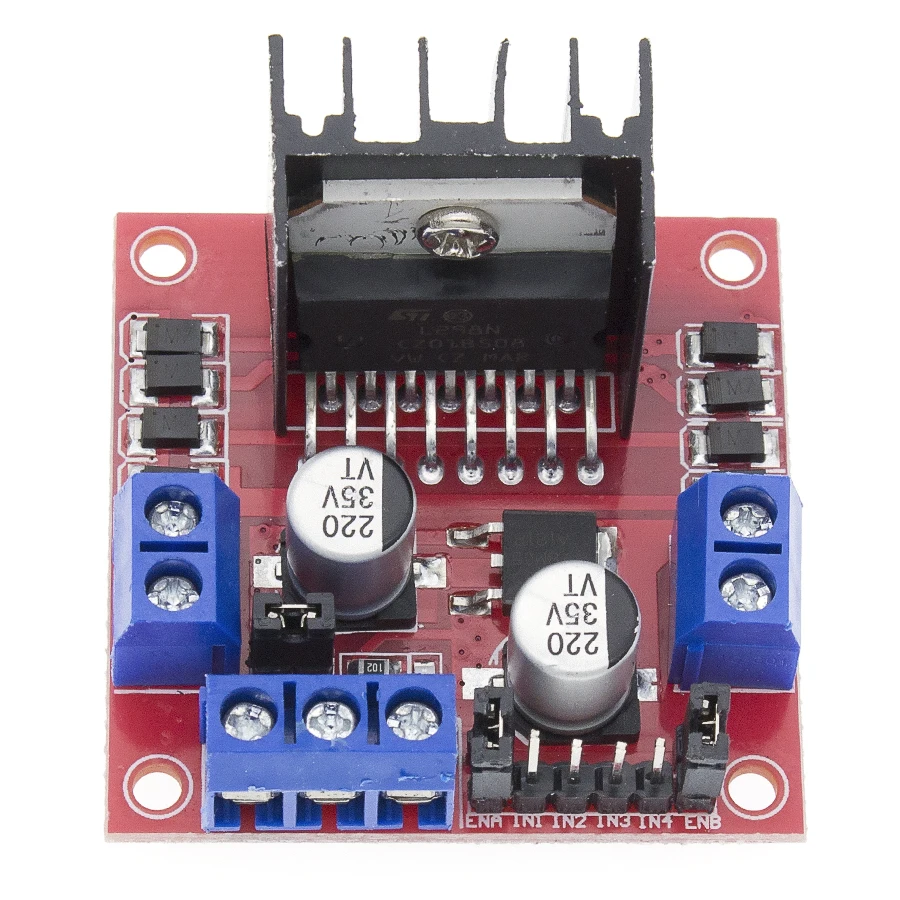
При использовании трехфазного сигнала управления подключенными к источнику тока всегда оказываются только две пары обмоток, а одна – отключена. В результате последовательно используется комбинация из шести состояний (рисунок 5).
Рис. 5. Чередование фаз при вращении BLDC
Электродвигатели без датчиков положения ротора отличаются повышенной технологичностью процесса изготовления и более низкой стоимостью. Подобная конструкция упрощает герметизацию внешних подключаемых выводов.
В качестве датчиков скорости и положения ротора в BLDC могут использоваться датчики Холла, которые отличаются небольшой стоимостью, но также и достаточно невысоким разрешением. Повышенное разрешение обеспечивают вращающиеся трансформаторы (резольверы). Они отличаются высокой стоимостью и требуют использования ЦАП, так как выходной сигнал у них синусоидальный. Высоким разрешением, но пониженной надежностью, обладают оптические датчики. На рисунке 6 представлены выходные сигналы датчиков разного типа при вращении ротора двигателя.
Рис. 6. Датчики положения ротора электродвигателей
Преимущества двигателей BLDC:
- высокая эффективность;
- отсутствие щеток, обеспечивающее повышенную надежность, снижение затраты на обслуживание;
- линейность тока/крутящего момента;
- упрощенный отвод тепла.
Особенности применения двигателей BLDC:
- более сложная система управления с обратной связью по положению ротора;
- пульсации крутящего момента.
Шаговые двигатели
Шаговые двигатели (ШД) получили достаточно широкое распространение в системах автоматики и управления. Они являются еще одним типом бесколлекторных двигателей постоянного тока. Конструктивно ШД состоят из статора, на котором размещены обмотки возбуждения, и ротора, выполненного из магнитных материалов. Шаговые двигатели с магнитным ротором позволяют обеспечить больший крутящий момент и жесткую фиксацию ротора при обесточенных обмотках.
В процессе вращения ротор ШД перемещается шагами под управлением подаваемых на обмотки статора импульсов питания. Шаговые двигатели удобны для использования в приводах машин и механизмов, работающих в старт-стопном режиме. Их диапазон перемещения задается определенной последовательностью электрических импульсов. Такие двигатели отличаются высокой точностью, не требуют датчиков и цепей обратной связи. Угол поворота ротора зависит от количества поданных импульсов управления. Точность позиционирования (величина шага) зависит от конструктивных особенностей двигателя, схемы подключения обмоток и последовательности подаваемых на них управляющих импульсов.
Шаговые двигатели удобны для использования в приводах машин и механизмов, работающих в старт-стопном режиме. Их диапазон перемещения задается определенной последовательностью электрических импульсов. Такие двигатели отличаются высокой точностью, не требуют датчиков и цепей обратной связи. Угол поворота ротора зависит от количества поданных импульсов управления. Точность позиционирования (величина шага) зависит от конструктивных особенностей двигателя, схемы подключения обмоток и последовательности подаваемых на них управляющих импульсов.
В зависимости от конфигурации схемы подключения обмоток шаговые двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет в каждой из двух фаз единую обмотку для обоих полюсов статора, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Биполярный двигатель имеет две обмотки и, соответственно, четыре вывода. Для управления таким ШД требуется мостовой драйвер или полумостовая схема с 2-полярным питанием.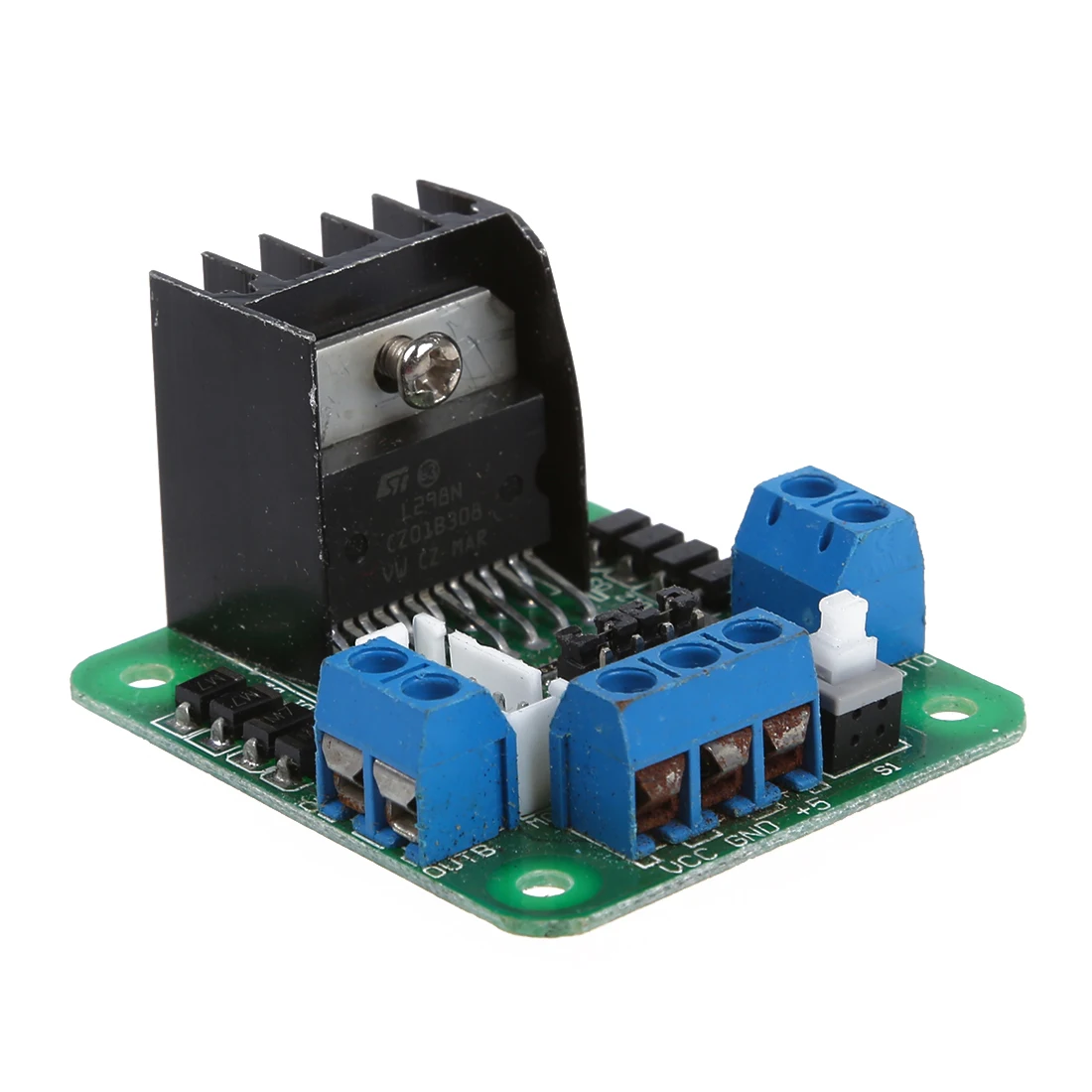 При биполярном управлении одновременно работают две обмотки и крутящий момент примерно на 40% больше. На рисунке 7 представлена последовательность сигналов управления при вращении биполярного ШД.
При биполярном управлении одновременно работают две обмотки и крутящий момент примерно на 40% больше. На рисунке 7 представлена последовательность сигналов управления при вращении биполярного ШД.
Рис. 7. Последовательность сигналов управления биполярным ШД
Униполярный двигатель использует в каждой фазе одну обмотку со средним выводом и позволяет использовать более простую схему управления с одним ключом на каждую из четырех полуобмоток.
Четырех обмоточные ШД могут использоваться как в биполярной, так и в униполярной конфигурации.
При протекании тока по одной из катушек ротор стремится изменить положение так, чтобы противоположные полюса ротора и статора установились друг против друга. Для непрерывного вращения ротора катушки попеременно переключают.
На практике используются разные способы подачи питания на четыре обмотки статора. Чаще всего применяют попарное подключение с полношаговым или полушаговым режимом работы. В полношаговом режиме ротор с двумя полюсами, вращающийся в переключаемом магнитном поле двух пар катушек, может занимать четыре положения (рисунок 8).
Рис. 8. Полношаговый режим управления ШД
Получить удвоенную точность позиционирования и восемь позиций позволяет полушаговый режим работы (рисунок 9). Для его реализации добавляется промежуточный шаг с одновременной запиткой всех четырех катушек.
Рис. 9. Полушаговый режим управления ШД
Значительно увеличить количество промежуточных положений и точность позиционирования позволяет режим микрошага. Идея микрошага заключается в подаче на обмотки шагового двигателя вместо импульсов управления непрерывного сигнала, напоминающего по форме ступенчатую синусоиду (рисунок 10). Полный шаг в этом случае делится на маленькие микрошаги, а вращение становится более плавным. Режим микрошага позволяет получить наиболее точное позиционирование. Кроме того, в этом режиме значительно снижается присущая шаговым двигателям вибрация корпуса.
Рис. 10. Управление ШД в режиме микрошага
Достоинства шаговых двигателей:
- невысокая стоимость благодаря отсутствию схем контроля скорости вращения и позиционирования;
- высокая точность позиционирования;
- широкий диапазон скоростей вращения;
- простой интерфейс управления с цифровыми контроллерами;
- очень высокая надежность;
- хороший удерживающий момент.
Особенности применения шаговых двигателей:
- ШД присуще явление резонанса;
- из-за отсутствия обратной связи возможна потеря контроля положения;
- потребление энергии не уменьшается даже при работе без нагрузки;
- затруднена работа на очень высоких скоростях;
- невысокая удельная мощность;
- достаточно сложная схема управления.
Традиционные решения для управления электродвигателями
Современная прецизионная система управления электродвигателем постоянного тока включает в себя микроконтроллер для обработки данных и блок управления питанием обмоток двигателя, часто называемый драйвером. В состав драйвера входит логическая схема для преобразования кодированных посылок в цифровые управляющие сигналы, из которых в блоке Gate Driver формируются аналоговые сигналы для управления силовыми ключами на основе полевых транзисторов (FET). FET могут входить в состав драйвера или размещаться в отдельном блоке. Кроме того, в состав драйвера входят схемы защиты силовых цепей и цепи обратной связи для контроля работы двигателя.
На рисунке 11 представлены варианты блок-схем для интегрированного и предварительного драйверов. Каждое из решений имеет свои преимущества и особенности. Предварительный драйвер (Pre-Driver) имеет значительно облеченный температурный режим, позволяет выбирать внешние силовые ключи в соответствии с мощностью подключаемого двигателя. Полнофункциональный интегрированный драйвер позволяет создавать более компактные системы управления, минимизирует внешние соединения, но значительно усложняет обеспечение необходимого температурного режима.
Рис. 11. Блок-схемы систем управления двигателем
Так, у интегрированного драйвера TI DRV8312 максимальная рабочая температура отдельных элементов на плате может достигать 193°С, а у предварительного драйвера DRV8301 этот показатель не превышает 37°С.
Рис. 12. Смена направления вращения коллекторного двигателя
Одной из наиболее распространенных схем для коммутации обмоток двигателей является мост типа “H”. Название схемы связано с конфигурацией подключения, которая похожа на букву “H”. Эта электронная схема позволяет легко изменять направление тока в нагрузке и, соответственно, направление вращения ротора. Напряжение, прикладываемое к обмоткам через транзисторы моста, может быть как постоянным, так и модулированным с помощью ШИМ. H-мост предназначен, в первую очередь, для смены полярности питания двигателя – реверса (рисунок 12), но также позволяет тормозить вращение, коротко замыкая выводы обмоток (рисунок 13).
Название схемы связано с конфигурацией подключения, которая похожа на букву “H”. Эта электронная схема позволяет легко изменять направление тока в нагрузке и, соответственно, направление вращения ротора. Напряжение, прикладываемое к обмоткам через транзисторы моста, может быть как постоянным, так и модулированным с помощью ШИМ. H-мост предназначен, в первую очередь, для смены полярности питания двигателя – реверса (рисунок 12), но также позволяет тормозить вращение, коротко замыкая выводы обмоток (рисунок 13).
Рис. 13. Режимы вращения, быстрого и медленного торможенияс
Важнейшей характеристикой силовых элементов моста, в качестве которых сегодня часто используют полевые транзисторы с изолированным затвором, является величина сопротивления открытого канала между истоком и стоком транзистора – RDSON. Значение RDSON во многом определяет тепловые характеристики блока и энергетические потери. С увеличением температуры RDSON также растет, а ток и напряжение на обмотках уменьшаются.
Использование управляющих сигналов с ШИМ позволяет уменьшить пульсации крутящего момента и обеспечить более плавное вращение ротора двигателя. В идеале частота ШИМ должна быть выше 20 кГц, чтобы избежать акустического шума. Но с увеличением частоты растут потери на транзисторах моста в процессе коммутации.
Из-за индуктивных свойств нагрузки в виде обмоток форма тока в ней не соответствует форме подаваемого напряжения ШИМ. После подачи импульса напряжения ток нарастает постепенно,а в паузах ток плавно затухает из-за возникновения в обмотках противо-ЭДС. Наклон кривой на графике тока, амплитуда и частота пульсаций влияют на рабочие характеристики двигателя (пульсации крутящего момента, шум, мощность и так далее).
Для ускоренного затухания в обмотках электродвигателей возбуждаемого эффектом противо-ЭДС тока используют диоды в обратном включении, шунтирующие переходы «сток-исток» транзисторов, либо закорачивают обмотки через переходы «сток-исток» двух транзисторов, одновременно включенных в разных плечах моста.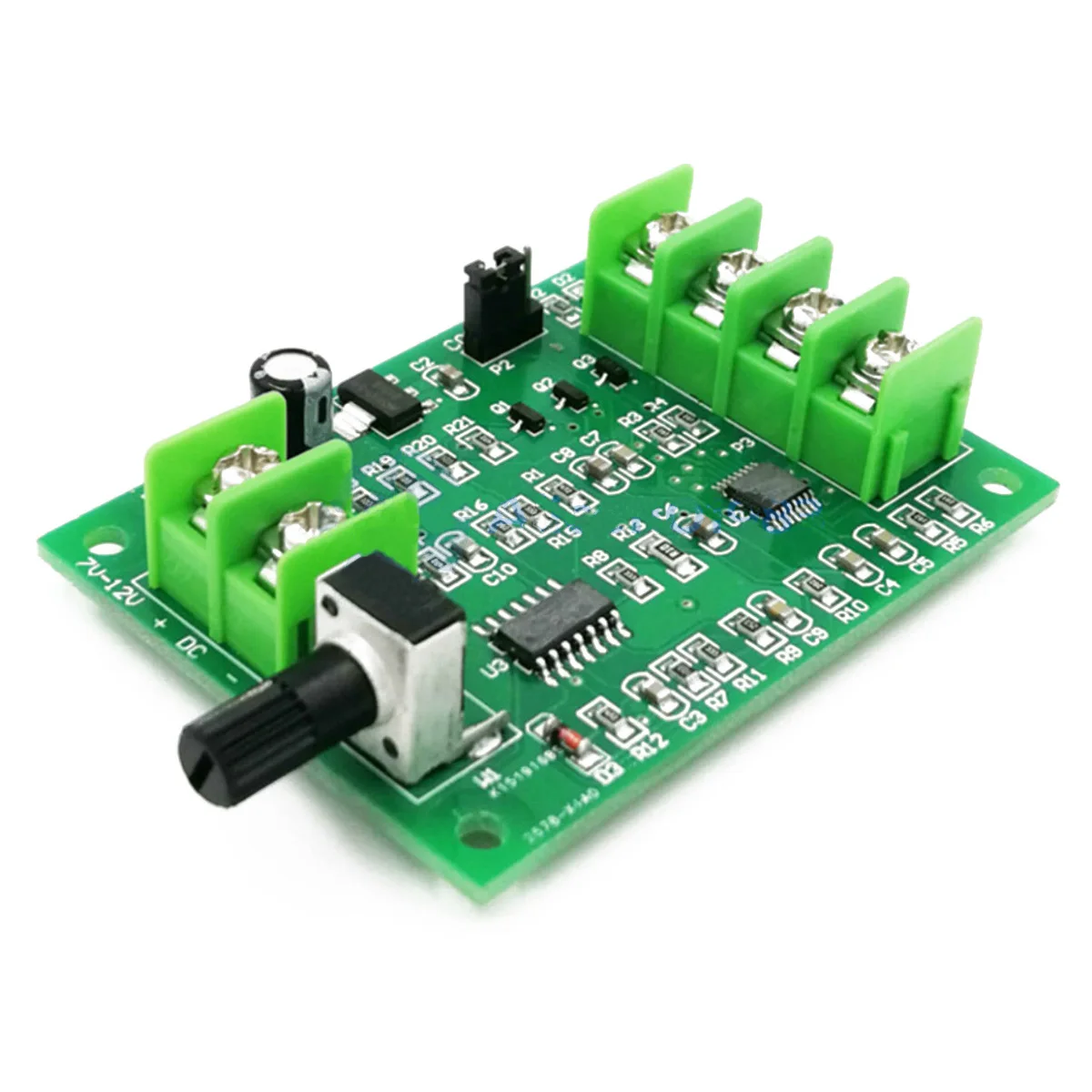 На рисунке 13 представлены три состояния моста: рабочее, быстрого торможения (Fast Decay) и медленного торможения (Slow Decay).
На рисунке 13 представлены три состояния моста: рабочее, быстрого торможения (Fast Decay) и медленного торможения (Slow Decay).
А наиболее эффективным считается комбинированный режим (Mixed Decay), при котором в паузе между рабочими импульсами сначала работают диоды, шунтирующие сток-исток транзисторов, а затем включаются транзисторы в нижних плечах моста.
Решения для управления электродвигателями от TI
Среди полупроводниковых компонентов, выпускаемых компанией TI, представлен обширный ассортимент различных драйверов для управления электродвигателями постоянного тока. Все они требуют минимума внешних компонентов, позволяют создавать компактные решения для управления двигателями с рабочим напряжением до 60 В, отличаются повышенной надежностью, обеспечивают быстрое и простое проектирование систем привода электродвигателями.
Встроенные в драйверы интеллектуальные функции требуют минимальной поддержки внешнего управляющего микроконтроллера (MCU), обеспечивают расширенные коммутационные возможности для обмоток, поддерживают внешние датчики и цифровые контуры управления.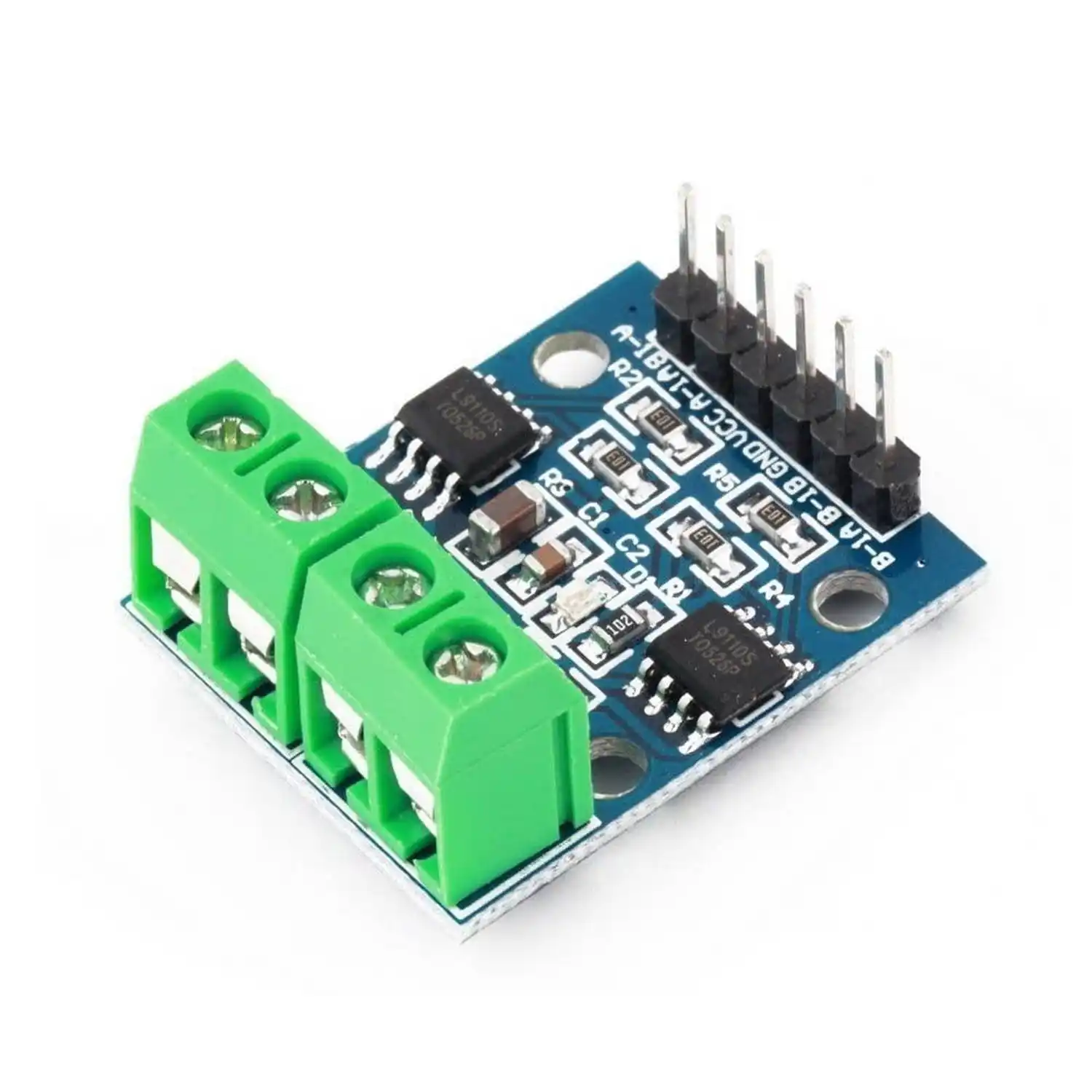 Комплекс защитных функций включает ограничение напряжения питания, защиту от превышения тока и короткого замыкания, понижения напряжения и повышения рабочей температуры.
Комплекс защитных функций включает ограничение напряжения питания, защиту от превышения тока и короткого замыкания, понижения напряжения и повышения рабочей температуры.
Весь модельный ряд драйверов TI разбит на три раздела: шаговые, коллекторные и бесколлекторные двигателей постоянного тока. В каждом из них на сайте компании действует удобная система подбора по целому ряду параметров. Есть отдельные драйверы, предназначенные для использования с двигателями разных типов.
Драйверы TI для шаговых двигателей
Большой раздел решений TI для управления двигателями включает драйверы для ШД (рисунок 14), которые выпускаются как со встроенными силовыми ключами на основе FET, так и в виде предварительных драйверов, предоставляющих пользователю подбор необходимых силовых ключей. Всего в модельном ряду компании более 35 драйверов для ШД.
Рис. 14. Драйверы TI для управления шаговыми двигателями
TI предлагает широкий выбор наиболее современных решений для управления перемещением и точным позиционированием с использованием микрошаговых схем управления, обеспечивающих электродвигателей плавным перемещением в широком диапазоне напряжения и тока.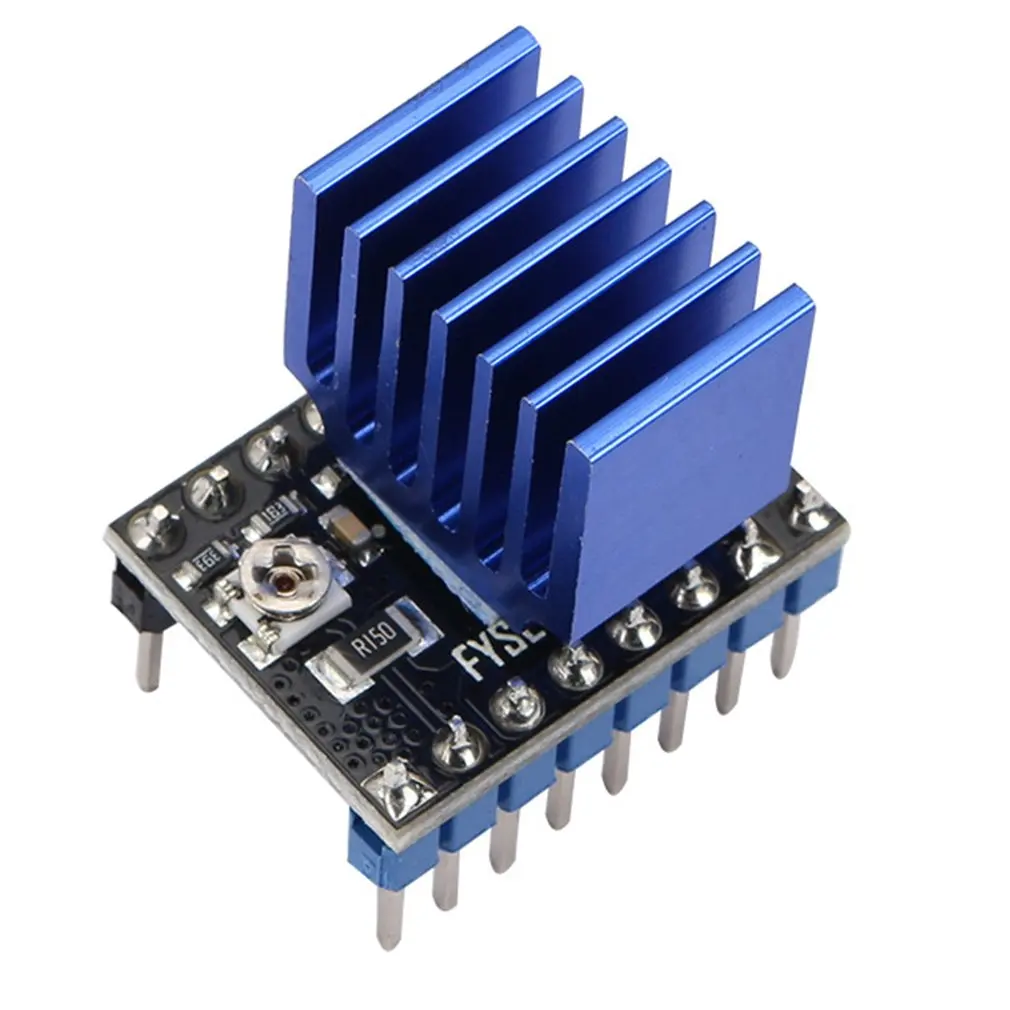
Отдельные драйверы, используя один управляющий контроллер, позволяют управлять сразу двумя двигателями, имея для этого четыре встроенных моста на основе FET. Есть драйверы с встроенными FET, например, DRV8834, которые можно подключить для управления к двум обмоткам шагового двигателя или использовать эти же выводы для управления двумя электродвигателями постоянного тока (рисунок 15).
Рис. 15. Блок-схема драйвера DRV8834
Для более плавного перемещения ротора в драйверах для ШД используется настраиваемый механизм сглаживания импульсов тока (режимы Slow, Fast, Mixed Decay). Система расчета микрошага может быть следующих типов:
- встроенной в драйвер;
- с использованием внешнего опорного сигнала.
Не требуют внешнего контроллера для микрошагового перемещения драйверы DRV881, DRV8818, DRV8821, DRV8824 и DRV8825. Здесь шаг перемещения и алгоритм коммутации обмоток рассчитываются схемой, встроенной в драйвер.
Более простые драйверы DRV8812, DRV8813, DRV8828, DRV8829, DRV8841, DRV8842 и DRV8843 обеспечивают микрошаговое вращение с использованием получаемого от внешнего контроллера опорного напряжения (Vref). Уровень дробления основного шага может достигать 1/128 или 1/256.
Уровень дробления основного шага может достигать 1/128 или 1/256.
Для управления ШД с униполярным подключением обмоток TI предлагает драйверы DRV8803, DRV8804, DRV8805 и DRV8806.
Драйверы TI для BDC
Для управления – коллекторными электродвигателями постоянного тока – предназначено специальное семейство драйверов DRV8x, ряд представителей которого изображен на рисунке 16. Они обеспечивает полную защиту от превышения напряжения и тока, короткого замыкания и перегрева. Благодаря возможностям интерфейса управления эти драйверы обеспечивают простую и эффективную эксплуатацию двигателей. Пользователи могут с помощью одного чипа управлять одним или несколькими двигателями c рабочим напряжением 1,8…60 В.
Рис. 16. Драйверы TI для управления коллекторными двигателями
Драйверы семейства выпускаются как с интегрированными силовыми ключами, так и как предварительные драйверы. Они требуют минимум дополнительных компонентов, обеспечивают компактность решений, сокращают время разработки и позволяют быстрее выпустить новые продукты на рынок.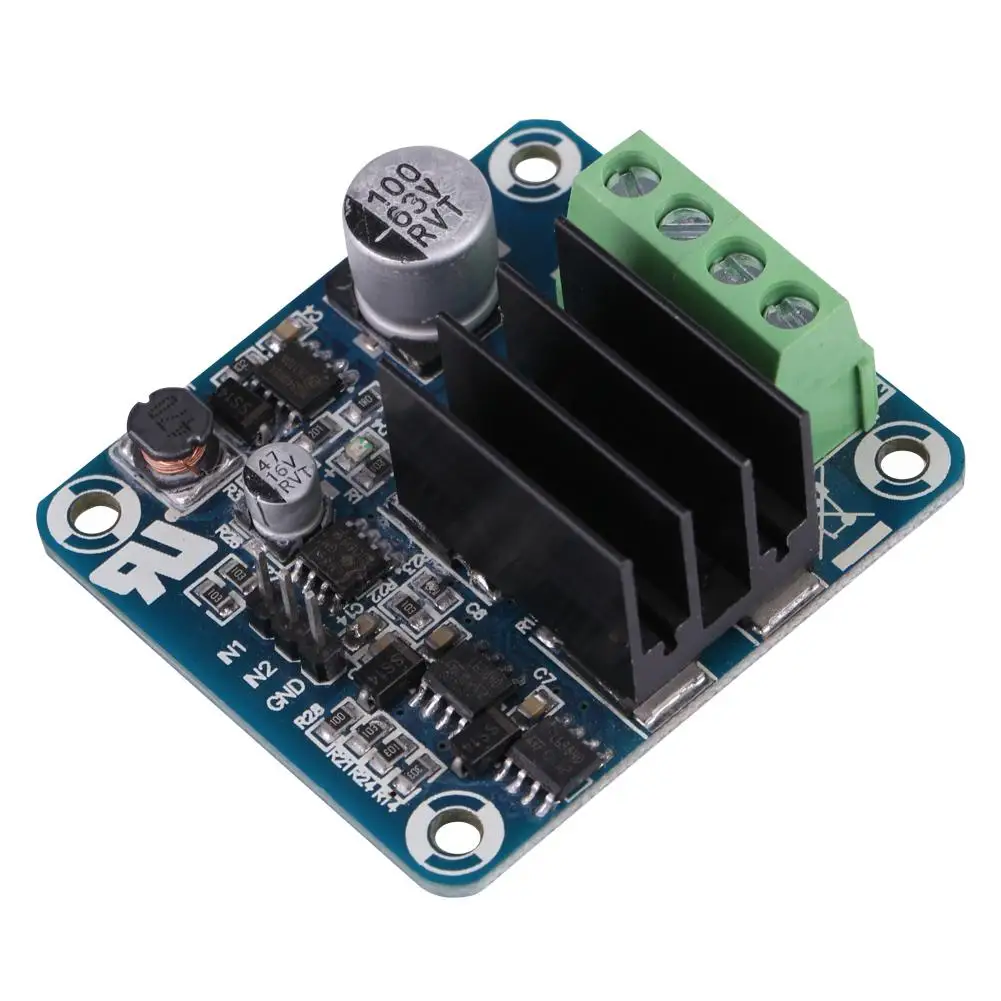
Спящий режим (Sleep) позволяет минимизировать потребление энергии в режиме простоя и обеспечивает ускоренную активизацию при запуске двигателя. Для управления скоростью вращения могут использоваться внешние сигналы ШИМ или сигналы PHASE/ENABLE для выбора направления вращения и включения ключей выходного моста.
Имеющий четыре выходных моста драйвер DRV8823 способен управлять двумя ШД или одним ШД и двумя BDC, или же четырьмя BDC, используя при этом управляющий интерфейс SPI.
На рисунке 17 представлена функциональная схема простого драйвера DRV8837 для управления одним коллекторным двигателем.
Рис. 17. Блок-схема драйвера DRV8837
Драйверы TI для BLDC
Драйверы TI для бесколлекторных двигателей, или BLDC, могут включать интегрированный силовой мост или использовать внешние силовые транзисторы. Схема формирования 3-фазных сигналов управления также может быть внешней или встроенной.
Семейство драйверов для управления бесколлекторными электродвигателями включает модели c разным принципом управления и с различным крутящим моментом.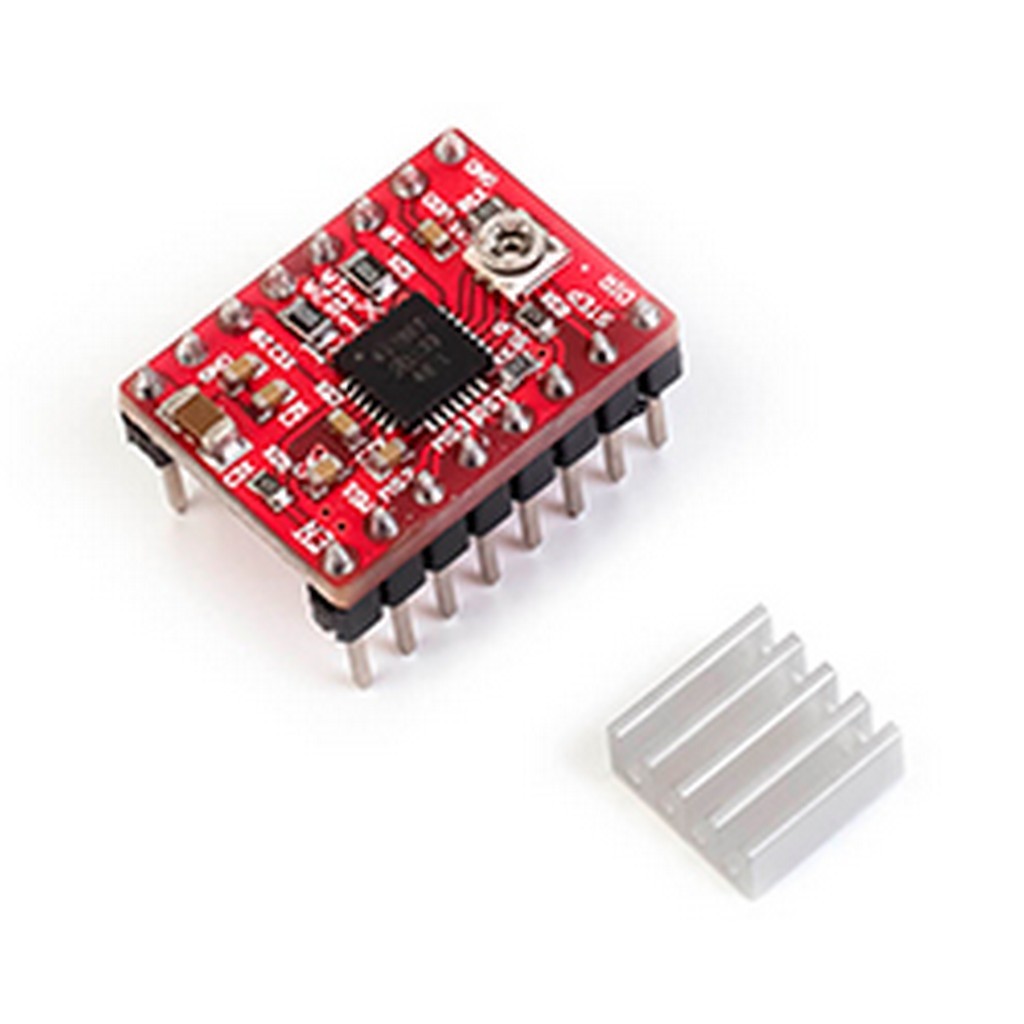 Эти драйверы, обеспечивающие разные уровни шума при управлении BDLС, идеально подойдут для использования в промышленном оборудовании, автомобильных системах и другой технике. Чтобы гарантировать надежную эксплуатацию электродвигателей, драйверы обеспечивают всеобъемлющий набор защит от превышения тока, напряжения и температуры. На рисунке 18 представлены лишь некоторые из 3-фазных драйверов для BLDC в обширном и постоянно пополняющемся модельном ряду компании TI.
Эти драйверы, обеспечивающие разные уровни шума при управлении BDLС, идеально подойдут для использования в промышленном оборудовании, автомобильных системах и другой технике. Чтобы гарантировать надежную эксплуатацию электродвигателей, драйверы обеспечивают всеобъемлющий набор защит от превышения тока, напряжения и температуры. На рисунке 18 представлены лишь некоторые из 3-фазных драйверов для BLDC в обширном и постоянно пополняющемся модельном ряду компании TI.
Рис. 18. Драйверы TI для управления бесколлекторными двигателями
Для контроля текущего положения вращающегося ротора могут использоваться внешние датчики разных типов или схема управления с определением позиции ротора по величине противо-ЭДС (Back Electromotive Force, BEMF).
Управление может выполняться с помощью ШИМ, аналоговых сигналов или через стандартные цифровые интерфейсы. Наборы настраиваемых параметров для управления вращением могут храниться во внутренней энергонезависимой памяти.
На рисунке 19 представлен работающий в широком диапазоне температур 40…125°C интеллектуальный драйвер для BLDC со встроенными силовыми ключами на полевых транзисторах, с сопротивлением открытого канала лишь 250 мОм. При диапазоне рабочих напряжений 8…28 В драйвер может обеспечивать номинальный ток 2 А и пиковый ток 3 А.
При диапазоне рабочих напряжений 8…28 В драйвер может обеспечивать номинальный ток 2 А и пиковый ток 3 А.
Рис. 19. Блок-схема драйвера DRV10983
Драйвер не требует внешнего датчика для контроля положения ротора, но может использовать внешний резистор для контроля потребляемой двигателем мощности. DRV10983 отличается незначительным энергопотреблением, составляющим всего 3 мА, в дежурном режиме. А в модели DRV10983Z этот показатель доведен до уровня 180 мкА.
Встроенный интерфейс I2C обеспечивает диагностику и настройку, доступ к регистрам управления работой логической схемы и хранящимся в памяти EEPROM рабочим профилям драйвера.
Расширенный комплект защитных функций обеспечивает остановку двигателя в случае превышения тока и понижения напряжения. Предусмотрено ограничение входного напряжения. Защита по превышению тока работает без использования внешнего резистора. Методы использования защиты настраиваются через специальные регистры.
Заключение
Электродвигатели находят все более широкое применение в самом различном оборудовании, совершенствуются и получают новые возможности во многом благодаря современным системам электропривода.
В ассортименте полупроводниковых компонентов производства компании Texas Instruments широко представлены микросхемы драйверов для управления всеми типами двигателей постоянного тока. На их основе компания предлагает масштабируемые в зависимости от требований по точности, мощности и функциональности решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных, бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.
Получение технической информации, заказ образцов, заказ и доставка.
•••
Наши информационные каналы
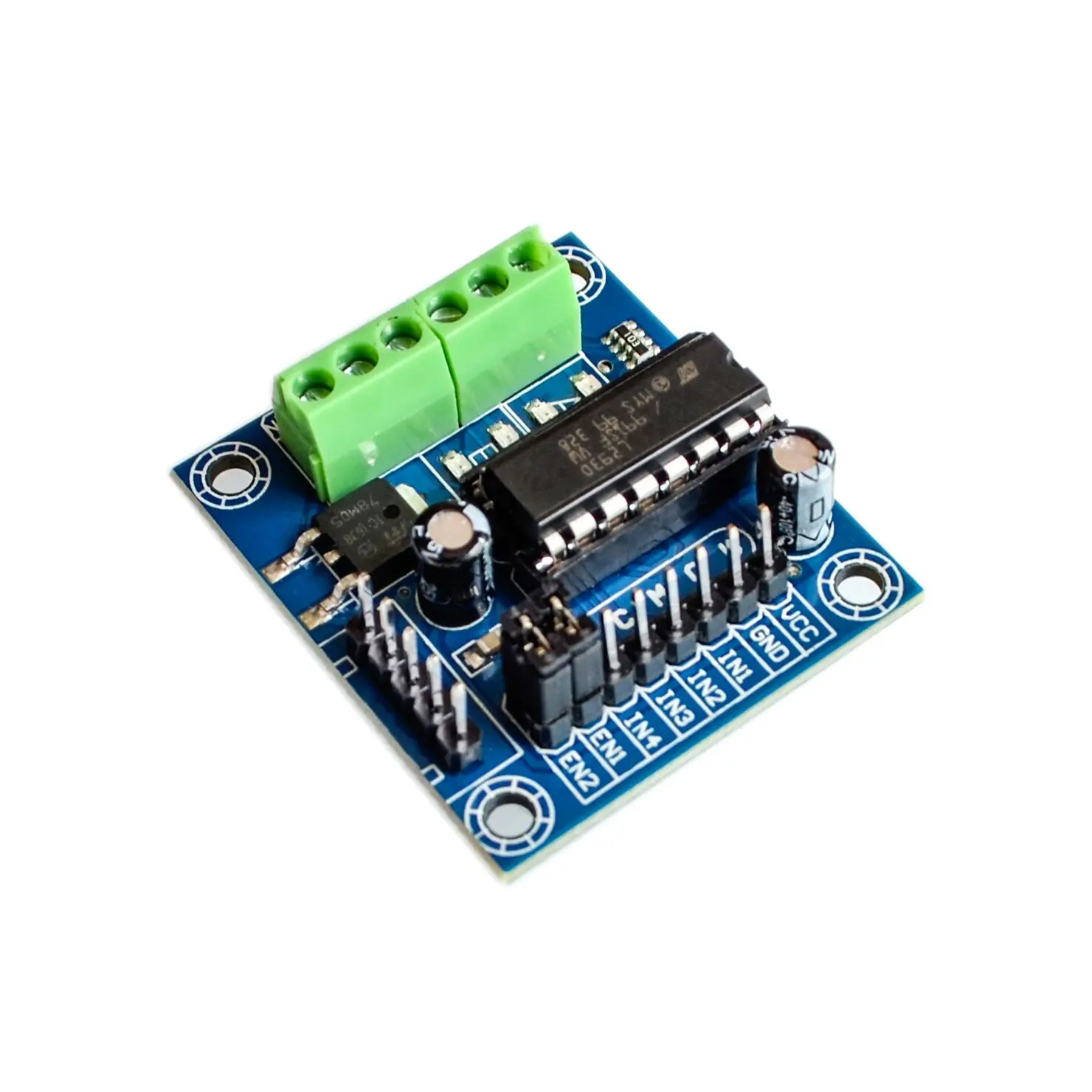
Электронный модуль «Драйвер двигателей L293D»
1. Назначение устройства
Назначение устройства
Электронный модуль «Драйвер двигателей L293D» артикул ПЭМ10.493 (Рис. 1.1) является элементом системы управляющей электроники «Эвольвектор ВЕРТОР» (далее ВЕРТОР). Он выполняет функцию исполнения команд подключенного к нему контроллера по управлению нагрузкой, которую не способен принять на себя контроллер. В частности драйвер позволяет управлять моторами с суммарным током потребления 1.2 А (два мотора по 0.6 А). Это позволяет использоватьего для создания робототехнических устройств на основе классических плат Ардуино, в которых требуется управлять подходящими по характеристикам двигателями постоянного тока.
Модуль рассчитан на применение совместно с программируемыми контроллерами и шилдами, входящими в систему ВЕРТОР (подробная информация о системе представлена на сайте https://academy.evolvector.ru).
Рис. 1.1
2. Конструкция модуля и назначение выводов (контактов)
Модуль «Драйвер двигателей L293D» выполнен в форме печатной платы, на которой смонтированы группа штыревых контактов, с помощью которых осуществляется управление подключенной нагрузкой; клеммники для подключения нагрузки; индикатор питания драйвера двигателей; индикаторы подачи сигналов на подключенную нагрузку; микросхема драйвера двигателей, являющаяся основным управляющим элементом модуля (Рис.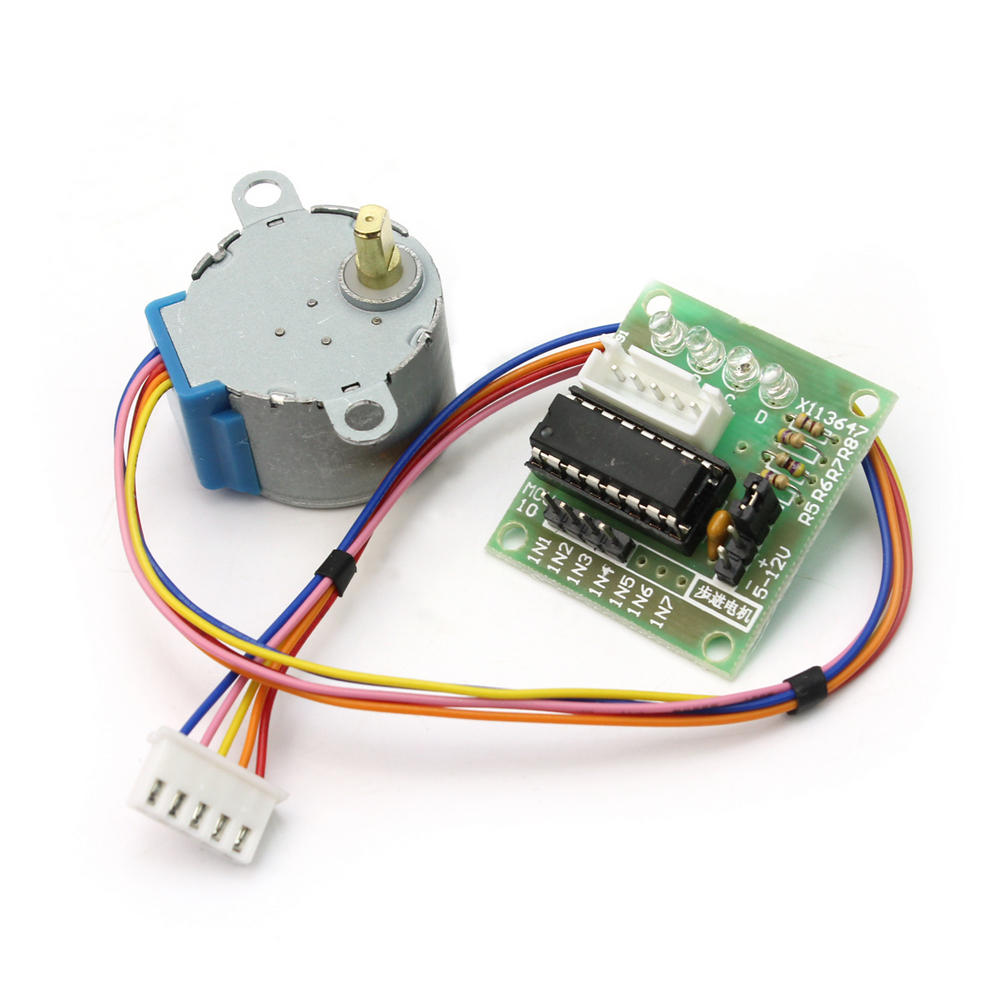 2.1)
2.1)
Рис. 2.1
Плата имеет четыре крепежных отверстия под винт М3. Диаметры крепежных отверстий и физические размеры модуля представлены на рисунке 2.2.
Рис 2.2
По расстоянию между крепежными отверстиями (кратно 8 мм) модуль совместим с конструкторами Эвольвектор, LEGO, MakeBlock и может крепиться к их деталям с помощью стоек.
Модуль не является независимым устройством и может работать совместно с контроллерами системы ВЕРТОР или иными контроллерами.
Подключение модуля осуществляется с помощью разъема XH-2.54-4P, выводы которого имеют следующее назначение:
VCC – к “+” источника питания контроллера;
MOTOR 4,5-36V – к “+” источника питания батареи;
IN1 – подключается к цифровому выводу контроллера с поддержкой ШИМ и предназначен для управления первым контактом (М11 на схеме рис.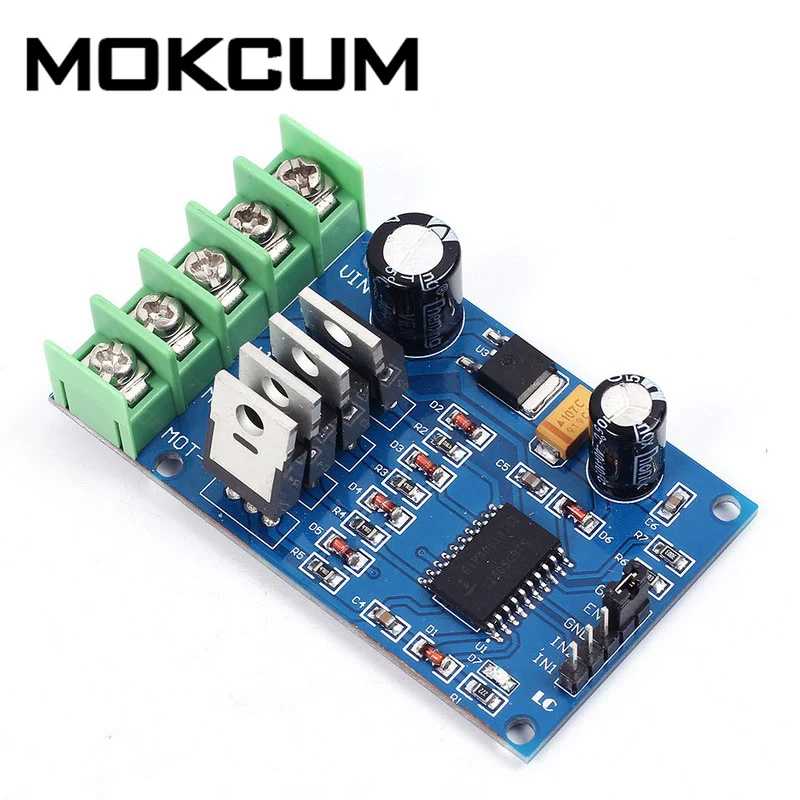 3.1а) мотора №1;
3.1а) мотора №1;
IN2 – подключается к цифровому выводу контроллера с поддержкой ШИМ и предназначен для управления вторым контактом (М12 на схеме рис. 3.1а) мотора №1;
IN3 – подключается к цифровому выводу контроллера с поддержкой ШИМ и предназначен для управления первым контактом (М21 на схеме рис. 3.1а) мотора №2;
IN4 – подключается к цифровому выводу контроллера с поддержкой ШИМ и предназначен для управления вторым контактом (М22 на схеме рис. 3.1а) мотора №2;
GND – «земля» (общий провод).
Для указанных контактов на печатной плате модуля нанесена соответствующая маркировка белого цвета.
Подробно о устройстве модуля, его функциях и возможностях рассказано на
Академии Эвольвектор – https://academy.evolvector.ru/pem10-493
Модули драйверов двигателей
Модуль 16-и канального ШИМ (PWM) контроллера на базе микросхемы PCA9685.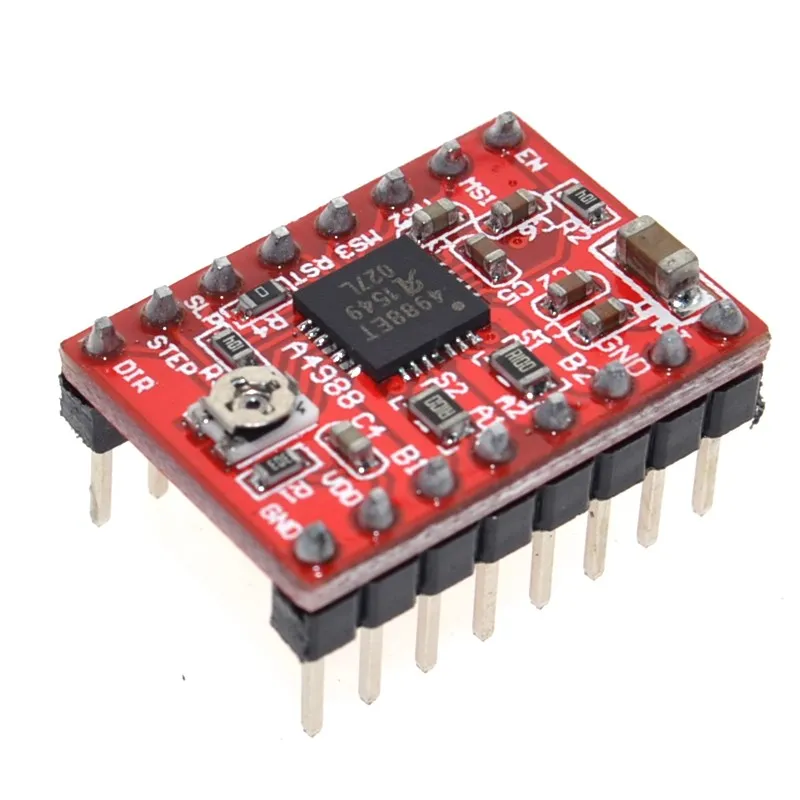 Идеально подходит для управления 16 рулевыми машинками (сервоприводами). Интерфейс управления: I2C
Напряжение питания модуля: 3-5 В
• Питание модуля: 3.3 или 5 В оба напряжения входят в диапазон допустимых;
• Питание чипа (VC..
Идеально подходит для управления 16 рулевыми машинками (сервоприводами). Интерфейс управления: I2C
Напряжение питания модуля: 3-5 В
• Питание модуля: 3.3 или 5 В оба напряжения входят в диапазон допустимых;
• Питание чипа (VC..
169.85 р.
Технические характеристики Напряжение питания силовой части (VMOT) : 5 – 35В Напряжения питания логической части (VDD) : 3-5,5В Ток максимальный, непрерывный, без дополнительного охлаждения: 1А Ток максимальный, с дополнительным охлаждением: 2.2A Дробление шага: 1/2/4/8/16 Описание DRV8825 это мик..
81.73 р.
Выходное напряжение 5 В Выходной ток 5А(max) Входное напряжение 7 – 30В, рекомендуемое до 24В ..
110.24 р.
Технические характеристики
Напряжение питания силовой части (VMOT) : 8 – 45В
Напряжения питания логической части (VDD) : 3-5,5В
Ток максимальный, непрерывный, без дополнительного охлаждения: 1А
Ток максимальный, с дополнительным охлаждением: 2. 2A
Дробление шага: 1/2/4/8/16/32 Описание
DRV8825 это м..
2A
Дробление шага: 1/2/4/8/16/32 Описание
DRV8825 это м..
135.51 р.
Технические характеристики напряжение питания: +7…+ 24 В; количество силовых каналов: 4; максимально-продолжительный ток каждого канала: 0,6 А; напряжение питания сервоприводов: 5 В; возможность реверса каждого двигателя; возможность независимого управления каждым каналом; Габариты 53 ..
135.16 р.
Драйвер двигателей на базе микросхемы VNh3SP30. Ток до 30Ампер. Напряжение до 16В • Диапазон напряжения питания: 5,5V … 16V (от 5,0 вольт, не работает). • Номинальный\максимальный ток: 14A\30A • Управление логическим уровнем 3,3 вольт • Максимальная частота ШИМ: 20 кГц ..
338.81 р.
Двухканальный драйвер двигателей на базе микросхемы VNh3SP30. Ток до 30Ампер на канал.
Напряжение до 16В
Позволяет управлять двумя двигателями постоянного тока или одним шаговым двигателем. • Напряжение питания на входе питания моторов Vin: 5,5 … 16 В;
• Напряжение логики: 5 В;
• Основан на чипе ..
525.14 р.
Питание 12В, 30A..
330.53 р.
Напряжение логики 3 – 5 В (VDD, GND) Напряжение для двигателей 5 – 46В (VMOT, GND) Рабочий выходной ток 1,2 А, до 2 А (с радиатором) Значение микрошага: 1/2, 1/4, 1/8, 1/16; Значение микрошага с интерполяцией: до 1/256; GND и VIO – питание логики; M1B, M1A, M2A, M2B – управление фазами двигателя; ..
402.51 р.
Данный модуль драйвера позволяет эффективно управлять одним шаговым двигателем, часто используется в 3D принтерах и станках ЧПУ. Больше всего привлекает бесшумной работой шагового двигателя, что довольно актуально на 3D принтерах работающих дома, большая надежность, повышенная мощностью до 2А по сра..
Больше всего привлекает бесшумной работой шагового двигателя, что довольно актуально на 3D принтерах работающих дома, большая надежность, повышенная мощностью до 2А по сра..
301.17 р.
Микросхема: L293D двойной-H мост DC моторов ..
622.48 р.
Контроллер позволяет управлять одним шаговым двигателем или двумя коллекторными двигателями постоянного тока. Для подключения двигателей постоянного тока предусмотрены клеммники – напряжение питания управляемой части (постоянный ток): 5-35В – питание внешней логики (Vss): 5-7В – входное напряжение..
215.49 р.
Микросхема L298N
• Управляющая часть пикового тока : 2 a
• Диапазон питания: от 4,5 до 5,5 В
• Логическая часть рабочего текущего диапазона: 0 ~ 36 мА
• Диапазон входного напряжения управления: 4,5 – 5,5
• Максимальная потребляемая мощность: 20 Вт
• Температура хранения: 25 град C ~ + 130 C
• Разме. .
.
218.63 р.
Микросхема L298N Напряжение питания: 5В Напряжение питания моторов: 5-35В Максимальный ток мотора: 2А (пиковый ток 3 А) Габариты: 43.5 мм х 43.2мм х 29.4мм..
120.53 р.
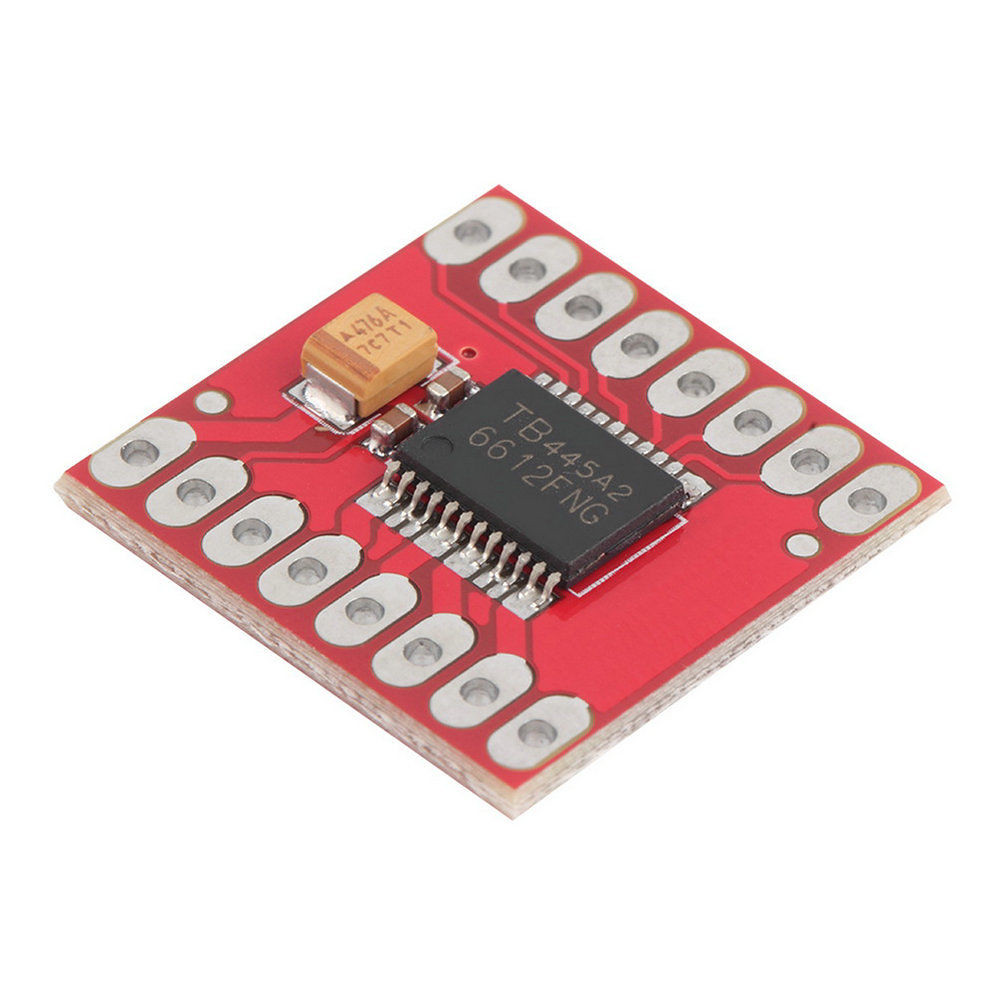
Великолепный двухканальный драйвер моторов, который идеально подходит для сопряжения микроконтроллера с двумя маленькими электродвигателями постоянного тока или для управления одним биполярным шаговым мотором. Основанные на MOSFET H-мостах намного более эффективны, чем основанные на BJT H-мостах кот..
284.78 р.
Контроллер шагового двигателя.
Микросхема контроллера: TB6560
– ток удержания 25%,50%,100% в процентах от тока номинального драйвера
– ток рабочий 25%, 50%, 75%, 100% в процентах от тока номинального драйвера
– выбрать шаг двигателя (микрошаг) 1, 1/2, 1/8, 1/16
Максимальный ток: 3А (3,5А в пике. .
.
402.61 р.
Кол-во фаз: 2; Напряжение питания: 9 – 40 В постоянного тока; Максимальный выходной ток: 4 А; Шесть вариантов микрошага. Максимальное деление шага до 6400 шагов/оборот; Входные сигналы оптоизолтрованы высокоскоростными оптронами; Выполнен в закрытом корпусе; Встроенная тепловая защита; Защита от пер..
584.30 р.
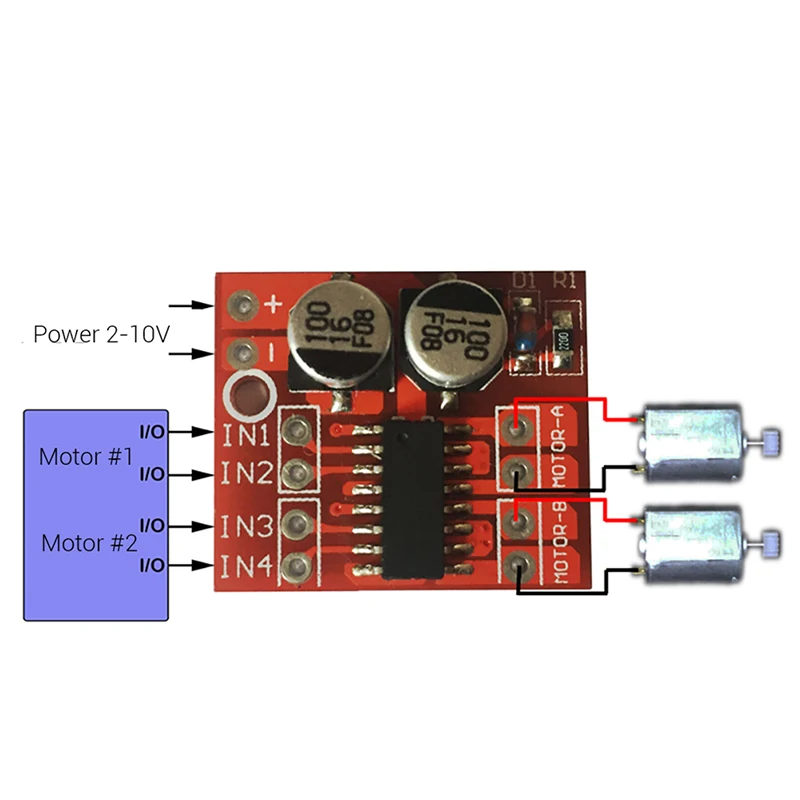
Драйвер двигателя L9110S — с его помощью можно контролировать вращение 2-х независимых коллекторных моторов постоянного тока или одного 4-х проводного 2-х фазного шагового двигателя. Характеристики • Входное напряжение: 2.5-12 В; • Допустимый ток на канал: 800 мА; • Максимальный кратковременный ток:..
74.34 р.
Модуль предназначен для управления шаговым двигателем или другой нагрузкой
► Тип шагового двигателя: Униполярный
► Напряжение питания: 5 В, DC
► Количество фазы: 4
► Частота: 100 Гц
► Сопротивление постоянного тока: 50Ω ± 7% (25 ℃)
. .
.
36.42 р.
Модуль ключей ULN2003 для шагового двигателя Характеристики Рабочее напряжение: 5 – 45 В; Максимальный ток нагрузки: 500 мА; Напряжение управляющей логики: 5 В. ..
37.97 р.
Регулируемое напряжение 50 – 220 V (на выходе) Технические характеристики: Максимальная мощность: 2000 Вт Рабочее напряжение: AC 220 V Пластина радиатора размер: 48x35x30 мм ..
119.98 р.
Материал: Алюминий
Диапазон входного напряжения: DC 9V-60V
Номинальный ток: 10А
Максимальный ток: 20А
Размер: 105 x 50 x 33 мм Подходит для двигателя постоянного тока (или нагрузки постоянного тока) в пределах 20А. ..
..
318.14 р.
Рабочее напряжение: 5 В … 30 В, защита от обратного подключения Номинальный ток 2,2: максимальный ток 5А 15а Максимальная мощность 2,3: 150 Вт Рабочая частота: 1 кГц ~ 99 кГц регулируемая, 1 кГц шаг, частота по умолчанию 20 кГц, точность около 1% Рабочий цикл: 0-100%, 1% шаг размер изделия: 79 мм ..
350.28 р.
Регулятор хода бесколлекторных двигателей. Оптимизирован для применения в мультикоптерах. Ток до 30А (пиковый ток 40А на 10 секунд) Входное напряжение 2-3s LiPo Вес 25гр..
368.76 р.
Габариты 69 × 53 × 9 mm
Напряжение питания: 3.3 или 5 В
Микросхема: PCA9685
Потребляемый ток: до 10 мА в рабочем режиме
до 15,5 мкА в режиме ожидания
Ток нагрузки на выходах: до 25 мА, при Vcc=5В и схемой с открытым стоком
до 10 мА, при Vcc=5В и схемой с каскадным выходом
Частота тактирования: 25 МГ. .
.
596.56 р.
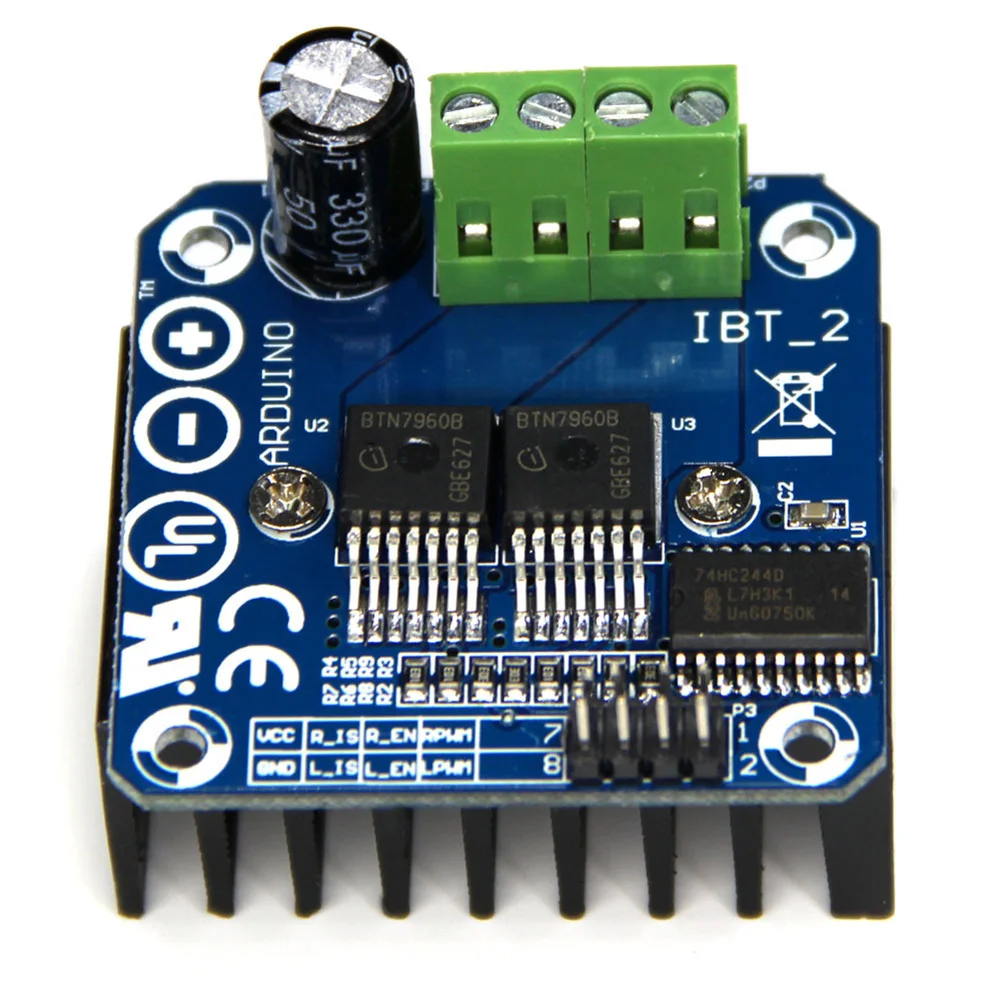
ДРАЙВЕР НИЗКОВОЛЬТНЫХ ЭЛЕКТРО ДВИГАТЕЛЕЙ
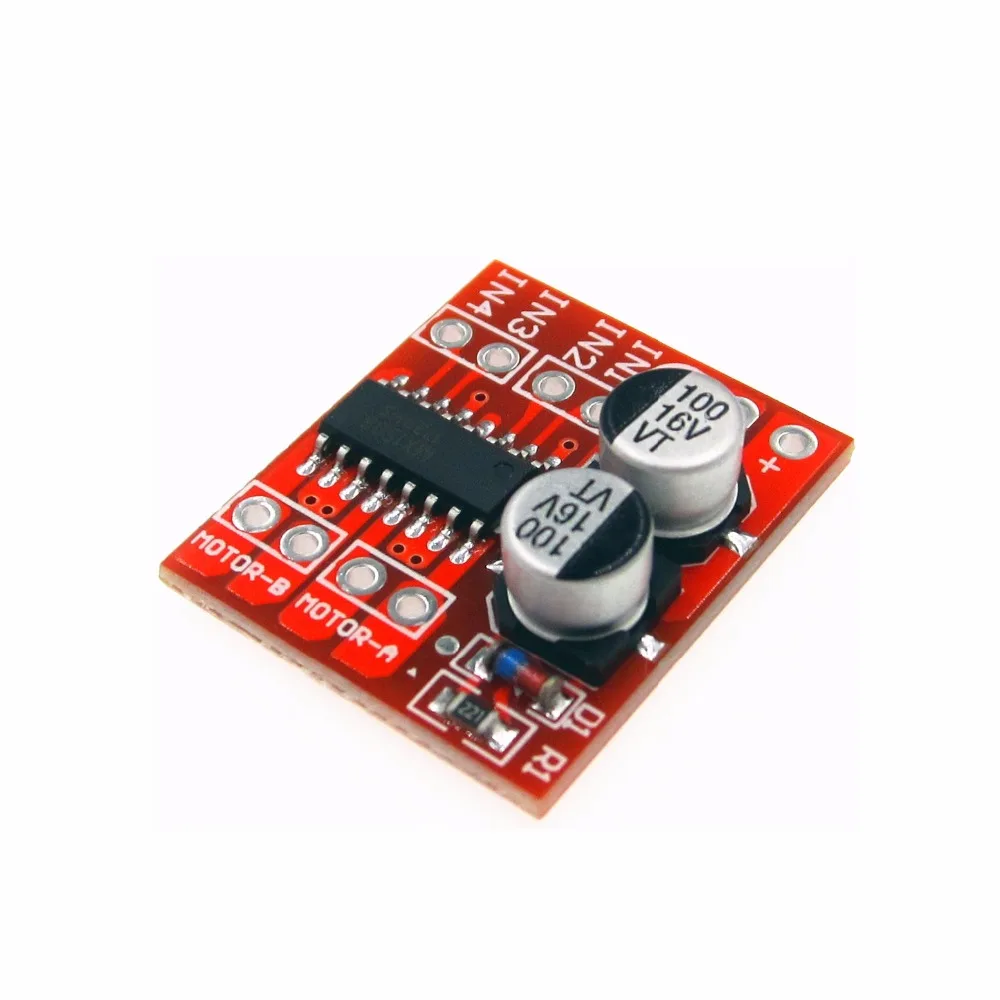
Основное применение аппаратной платформы Arduino – это конструирование роботов, во всяком случае, начинается знакомство с данной аппаратной платформой, как правило, именно с этого. Ходовая часть большинства колесных роботов [1] оснащается электромоторами, которые представляют собой мощную нагрузку, прямое подключение которой к портам Arduino может вызвать только выход из строя последней. Для подключения нагрузки потребляющей большой ток можно использовать самодельные релейные схемы или транзисторные ключи [2], а можно приобрести готовый драйвер для подключения электродвигателей на Ru.aliexpress.com
Устройство поставляется в обычном антистатическом пакете.
Модуль представляет собой печатную плату размером 43 х 43 мм, на которой установлена микросхема радиаторе, высота которого составляет 24 мм, масса 25 г.
Данное устройство позволяет одновременно управлять парой маломощных низковольтных электродвигателей постоянного тока. По заявлениям продавца максимально допустимый общий ток, которым можно нагрузить драйвер составляет 2 А на канал, а максимальная мощность двигателей ограничена 20 Вт. На плате хорошо видна пара двухклемных колодок для подключения электромоторов и трехклемная колодка для подачи напряжения питания.
Устройству требуется два напряжения питания 5-35 В для электродвигателей и 5 В для электронной части. При подаче питания на плате загорается индикатор подачи напряжения питания. При питания от напряжении ниже 12 В (автор проверял при 6 В), отдельный источник питания для электронной части можно не подключать.
На плате рядом с клеммой питания имеется перемычка, которую необходимо снять в случае раздельного питания силовой и электронной части [3-6]. Все колодки промаркированы с тыльной стороны платы.
Для управления нагрузкой плата драйвера имеет 6 информационных входов.
Входы IN1, IN2 задают направление вращения одного двигателя, а другая пара IN3, IN4, соответственно другого. Если на одном из входов пары присутствует низкий логический уровень, а на другом высокий, то ротор двигателя вращается в одну сторону, а если, сигналы поменяются на противоположные, то направление вращения также сменится. Если на оба входа подать низкий логический уровень, то двигатель будет остановлен. Как понимает автор, подача высокого логического уровня на оба выхода пары одновременно не допустима [7].
Если управление парой двигателей осуществляется только по четырем проводам, то двигатель развивает максимально допустимую мощность (программа L298N_1, взята из [5]). Скачать файл
Видео 1
Для управления мощностью двигателей предусмотрены входы ENA и ENB. ENA привязан к IN1, IN2, а ENB регулирует мощность двигателя, управляемого через IN3, IN4. В простейшем случае, когда нет необходимости в регулировании оборотов двигателя, эти входы замкнуты перемычками на шину питания. Для управления скоростью вращения электромоторов используется ШИМ [8-10], соответственно необходимо подключать к данным входам драйвера те порты Arduino, которые поддерживают данный режим. При этом для управления одним двигателем в данном режиме понадобится три порта Arduino (программа L298N_2, взята из [5]).
В простейшем случае, когда нет необходимости в регулировании оборотов двигателя, эти входы замкнуты перемычками на шину питания. Для управления скоростью вращения электромоторов используется ШИМ [8-10], соответственно необходимо подключать к данным входам драйвера те порты Arduino, которые поддерживают данный режим. При этом для управления одним двигателем в данном режиме понадобится три порта Arduino (программа L298N_2, взята из [5]).
Видео 2
Как говорилось выше драйвер двигателей L298N позволяет аналогично управлять двумя двигателями, при этом, разумеется, в совокупности понадобится задействовать 6 портов Arduino.
Для демонстрации работы модуля код программ взят из [5], но следует отметить, что в примере, который демонстрирует работу пары электромоторов, допущена ошибка при назначении портов управления ENA и ENB (исправленный вариант L298N_3).
Видео 3
Для подключения драйвера к Arduino UNO были использованы проводники с гнездами на обоих концах. Длина проводов 10 см, эти соединительные провода были приобретены тоже на Али.
Также данное устройство можно использовать для управления шаговым двигателем [11].
Подведём итог
В целом это отличный и недорогой способ управления ходовой частью робота. Своих денег устройство однозначно стоит. Обзор подготовил специально для “Радиосхем” – Denev.
Источники
- 1) http://radioskot.ru/publ/raznoe/shassi_dlja_kolesnogo_robota/18-1-0-1122
- 2) Лекомцев Д.Г. Arduino. Подключение типовых внешних устройств. – Радио, 2016, №11, с. 51-54
- 3) http://cxem.net/arduino/arduino70.php
- 4) http://www.2150692.ru/faq/72-l298n-arduino
- 5) http://zelectro.cc/Motor_shield_L298N_Arduino
- 6) http://robot-kit.
 ru/article_info.php/articles_id/22/article/-font-color—993300–Draiver-motorov-na-L298N-podklyuchenie-k-Arduino–font-
ru/article_info.php/articles_id/22/article/-font-color—993300–Draiver-motorov-na-L298N-podklyuchenie-k-Arduino–font- - 7) Холостов К. Робот-пылесос. Журнал Левша №3 2015 г. с.12-14
- 8) Холостов К. Умный дом. Журнал Левша №2 2013 г. с.12-14
- 9) Лекомцев Д.Г. Arduino. Подключение типовых внешних устройств. – Радио, 2016, №11, с. 51-54
- 10) http://robocraft.ru/blog/arduino/58.html
- 11) http://arduino-diy.com/arduino-drayver-shagovogo-dvigatelya-i-dvigatelya-postoyannogo-toka-L298N
Форум
Форум по обсуждению материала ДРАЙВЕР НИЗКОВОЛЬТНЫХ ЭЛЕКТРО ДВИГАТЕЛЕЙ
ДРАЙВЕР МОТОРА
Схемы для управления электрическими моторами, используемые в разных конструкциях (машинах, роботах), различаются как мощностью, так и радиоэлементами, на основе которых они выполнены. Естественно в последнее время предпочтение стали отдавать драйверам управления выполненных на специализированных микросхемах. Одна из наиболее распространённых — микросхема L293D, что содержит сразу два драйвера для управления электродвигателями небольшой мощности (четыре независимых канала, объединенных в две пары). Она имеет две пары входов для управляющих сигналов и две пары выходов для подключения электромоторов. Кроме того, у L293D есть два входа для включения каждого из драйверов. Эти входы используются для управления скоростью вращения электромоторов с помощью ШИМ. Даташит можно посмотреть по ссылке.
Она имеет две пары входов для управляющих сигналов и две пары выходов для подключения электромоторов. Кроме того, у L293D есть два входа для включения каждого из драйверов. Эти входы используются для управления скоростью вращения электромоторов с помощью ШИМ. Даташит можно посмотреть по ссылке.
Характеристики микросхемы L293D
- напряжение питания двигателей (Vs) — 4,5…36 В
- напряжение питания микросхемы (Vss) — 5 В
- допустимый ток нагрузки — 600 мА (на каждый канал)
- максимальный ток на выходе — 1,2 A (на каждый канал)
- логический “0” входного напряжения — до 1,5 В
- логическая “1” входного напряжения — 2,3…7 В
- скорость переключений до 5 кГц.
- встроенная защита от перегрева
Схема сборки драйвера мотора
Схема управления двигателем постоянного тока подходит для моторов малой и средней мощности. Она позволяет контролировать до 6 двигателей. Контроллер может обеспечить ток до 600 мА на канал, а мост на транзисторах может обеспечить и более ампера на каждый канал.
Печатная плата для схемы
Принцип работы драйвера двигателя можно понять, рассмотрев таблицу.
Контроллер имеет следующие разъемы:
- INPUT (A, B, C, D ,E, F). Прием аналоговых или дискретных сигналов, которые могут быть отправлены, например, от микроконтроллера.
- ENABLE (E1-2, E3-4). Активация входов от L293D. Напряжение не может быть выше, чем 7В.
- OUTPUT (+M1, -М1 +М2, М2, +М3, м3). Контакты, где двигатели должны быть подключены к схеме.
- ПИТАНИЕ +9-12В. Напряжении питания двигателей. Этот вход по вольтажу должен быть максимум 36V.
- ПИТАНИЕ +5V. Это напряжение питания для L293D. Вы можете сюда подключить питающее напряжение выше, чем 5V, потому что он подключен к регулятору напряжения LM7805.
Драйвер шагового двигателя SMD-8.0DIN | ООО Электропривод
SMD-8. 0DIN является драйвером шаговых двигателей нового поколения, поддерживает два режима управления и
показывает отличную динамику и высокий момент на больших скоростях. Блок предназначен для работы с
шаговыми двигателями с током фазы до 8.0 А в биполярном режиме. Крепление драйвера на стандартную DIN
рейку облегчает его размещение в условиях производства.
0DIN является драйвером шаговых двигателей нового поколения, поддерживает два режима управления и
показывает отличную динамику и высокий момент на больших скоростях. Блок предназначен для работы с
шаговыми двигателями с током фазы до 8.0 А в биполярном режиме. Крепление драйвера на стандартную DIN
рейку облегчает его размещение в условиях производства.
Способы управления шаговым двигателем:
- Импульсное управление положением
- Аналоговое управление скоростью
Дополнительные возможности:
- Встроенный тормозной резистор для работы с высокоинерционной нагрузкой
- Возможность подключения внешнего тормозного резистора
- Автоматический переход между токовым (с более высоким моментом и лучшей динамикой) и вольтовым (с более плавной и тихой работой) режимами управления фазами
- Дробление шага до 1/128
- Выбор значения тока удержания 70 % или 100 %
- Возможность инвертирования сигнала Enable
Принципиальное отличие этого драйвера от предыдущих исполнений – новая конструкция и улучшенная
схемотехника, которые
обеспечивают очень быстрый разгон и сохранение значительного крутящего момента на высоких скоростях. Разгон до скоростей
1000 об/мин и более может осуществляться за доли секунды. Рабочая скорость более 4000 об/мин с
поддержанием крутящего
момента, достаточного для выполнения полезной работы теперь доступна для большинства моделей шаговых
двигателей.
Разгон до скоростей
1000 об/мин и более может осуществляться за доли секунды. Рабочая скорость более 4000 об/мин с
поддержанием крутящего
момента, достаточного для выполнения полезной работы теперь доступна для большинства моделей шаговых
двигателей.
Для питания драйвера могут использоваться стабилизированные и нестабилизированные источники питания постоянного тока. Для снижения общей стоимости возможно использование нескольких блоков управления с одним источником питания.
В зависимости от поставленной задачи блок управления может использоваться в одном из двух режимов
управления –
импульсное управление положением для решения задач позиционирования, управление скоростью аналоговым
сигналом – для задач поддержания и регулирования скорости.
Toshiba представляет новую ИС драйвера коллекторных электродвигателей для поверхностного монтажа
Компания Toshiba Electronics Europe расширяет ассортимент миниатюрных драйверов коллекторных электродвигателей для поверхностного монтажа и представляет драйвер TB67h520FTG, предназначенный для систем с высоким напряжением, таких как бытовые роботизированные пылесосы, банковские терминалы, автоматы выдачи наличных и другое бытовое оборудование.
Коллекторные электродвигатели, также используемые в принтерах и офисном оборудовании, требуют более мощных приводов для создания необходимых высоких значений крутящего момента. По мере роста количества автоматизированных систем, использующих электродвигатели, растет потребность в компактных решениях, позволяющих экономить пространство.
При создании приводов мощных коллекторных электродвигателей требуются высокие выходные напряжения, которые могут создавать высокие нагрузки в цепях драйверов.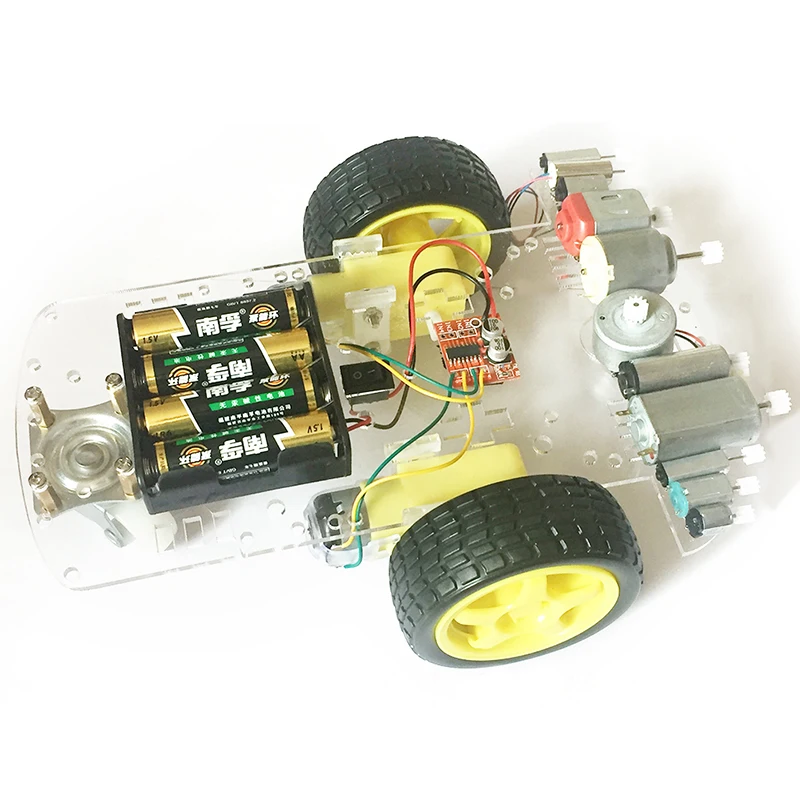 Уникальная особенность коллекторных электродвигателей также заключается в том, что они требуют высоких пусковых токов, которые также создают нагрузку на драйверы. Как правило, для создания мощных приводов используется смешанная технология: интегрированный драйвер и дискретные переключающие МОП-транзисторы. Такой подход допустим, но при этом увеличивается количество компонентов и, тем самым, стоимость и размеры системы.
Уникальная особенность коллекторных электродвигателей также заключается в том, что они требуют высоких пусковых токов, которые также создают нагрузку на драйверы. Как правило, для создания мощных приводов используется смешанная технология: интегрированный драйвер и дискретные переключающие МОП-транзисторы. Такой подход допустим, но при этом увеличивается количество компонентов и, тем самым, стоимость и размеры системы.
Новое устройство выпускается на основе самого современного технологического процесса Toshiba с проектной нормой 130 нм. В нем реализован режим одного выходного моста, обеспечивающий ток до 9,0 А при напряжении 50 В. Новый драйвер также может управлять двумя коллекторными электродвигателями (50 В, 2 канала по 4,5 А) благодаря реализации режима двух мостов, позволяющего независимо управлять каждым каналом за счет наличия двух раздельных выходных каналов.
Новый драйвер коллекторных электродвигателей TB67h520FTG может работать с самыми современными мощными приводами и помогает экономить пространство благодаря миниатюрному корпусу для поверхностного монтажа QFN48 размерами 7 мм x 7 мм.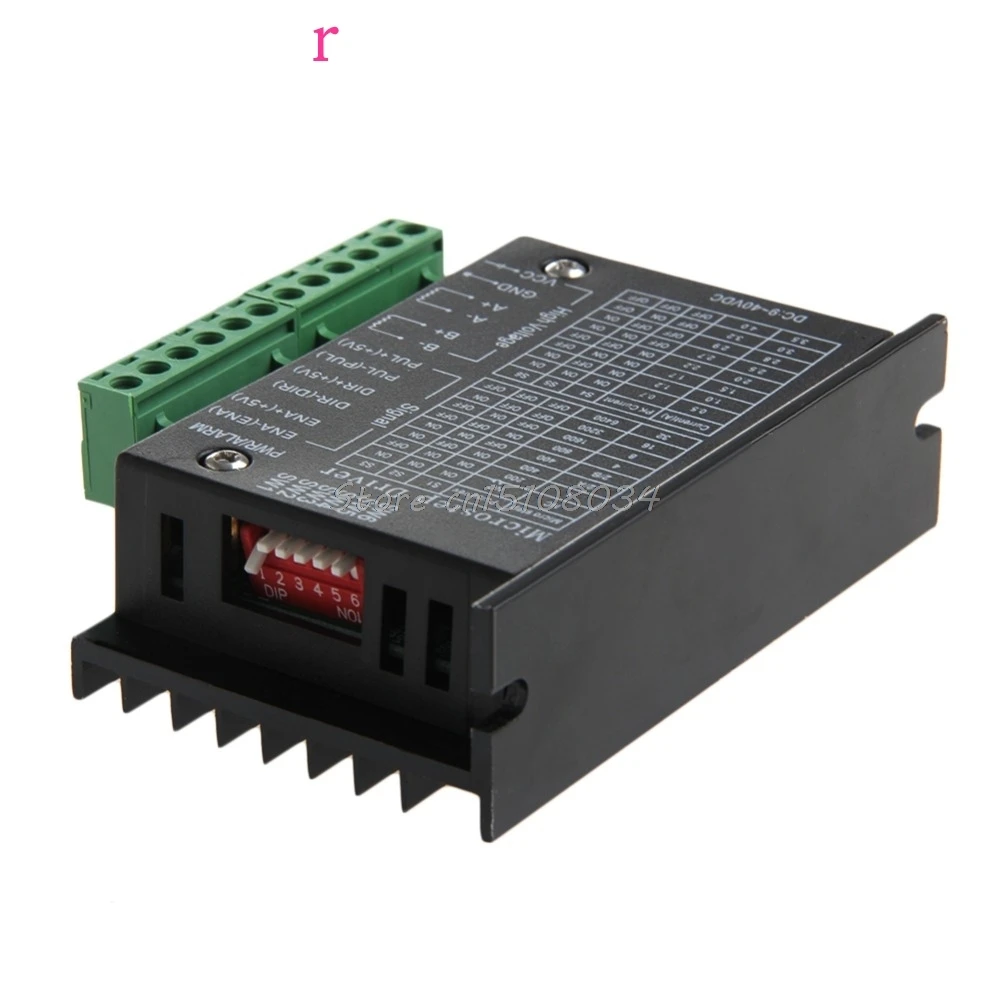 Встроенные МОП-транзисторы обладают сверхнизким сопротивлением в открытом состоянии (всего 0,17 Ом в режиме одного моста и 0,33 Ом в режиме двух мостов), обеспечивая тем самым эффективную работу и минимальное тепловыделение.
Встроенные МОП-транзисторы обладают сверхнизким сопротивлением в открытом состоянии (всего 0,17 Ом в режиме одного моста и 0,33 Ом в режиме двух мостов), обеспечивая тем самым эффективную работу и минимальное тепловыделение.
Помимо ограничителя тока и основных встроенных функций обнаружения ошибок (перегрев, перегрузка по току, защитное отключение при низком напряжении) новый драйвер также имеет пользующийся спросом у заказчиков выход сигнала обнаружения ошибки, который позволяет сообщать системе о любых ошибках, тем самым обеспечивая повышенный уровень безопасности.
В новом драйвере коллекторных электродвигателей также применяется расширенная система определения тока (Advanced Current Detection System, ACDS) компании Toshiba для слежения за током и управления им без использования токочувствительных резисторов, что позволяет сэкономить пространство на печатной плате и снизить стоимость компонентов.
Компания Toshiba Electronic Devices & Storage Corporation рассматривает устройство TB67h520FTG в качестве флагманской модели драйвера коллекторных электродвигателей постоянного тока следующего поколения благодаря его расширенным возможностям для создания приводов с высокими значениями напряжения и тока, а также благодаря его широкой сфере применения, обусловленной наличием режима двух мостов и возможностям обработки ошибок.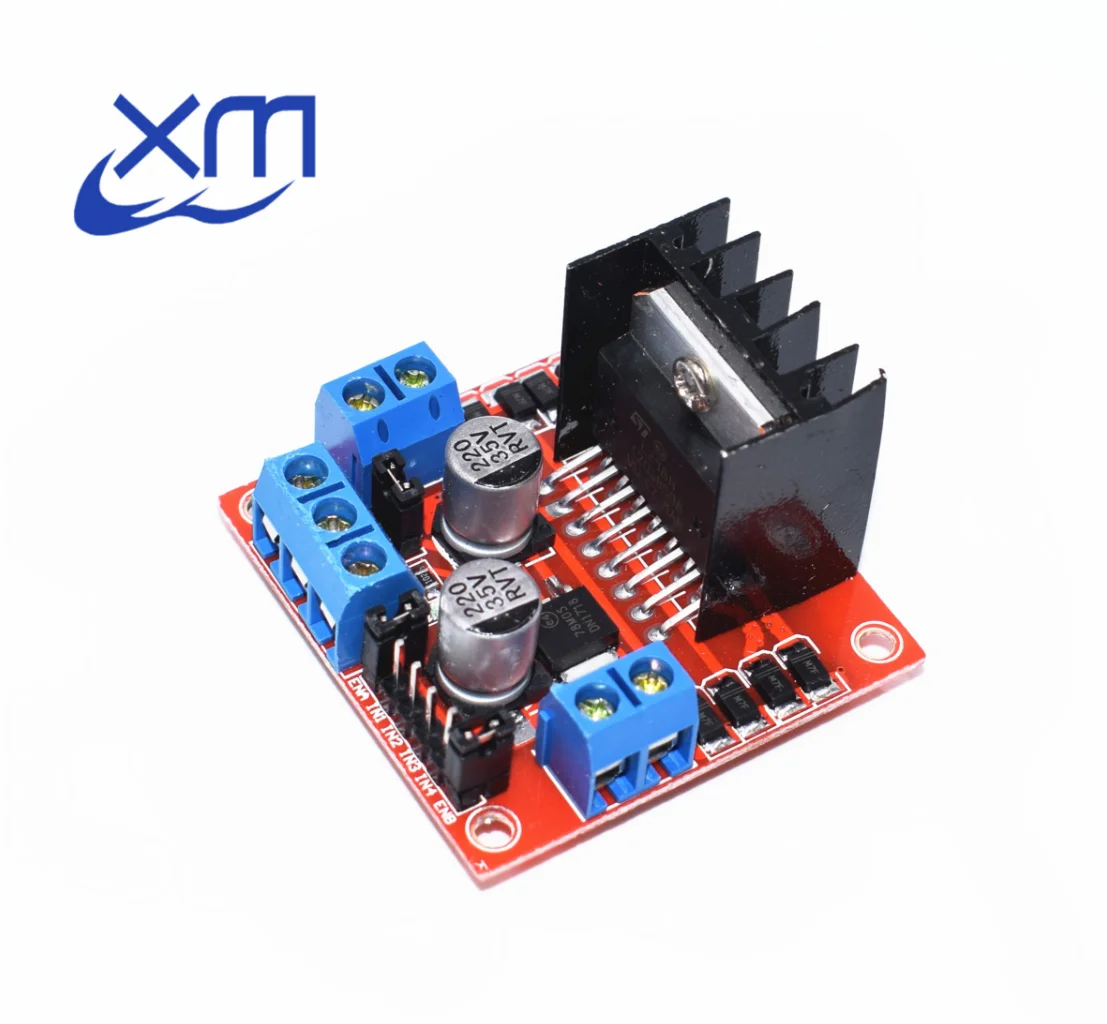
Серийное производство новых устройств TB67h520FTG уже началось.
Драйвер двигателя | Электротехнические уроки | Повязки Mepits
Цепь драйвера двигателя постоянного тока
Моторные приводы
Моторные приводы – это цепи, используемые для запуска двигателя. Другими словами, они обычно используются для сопряжения двигателей. Эти схемы привода могут быть легко сопряжены с двигателем, и их выбор зависит от типа используемого двигателя и их номинальных значений (ток, напряжение).
Основные компоненты моторных приводовОсновными компонентами привода двигателя для двигателей постоянного тока являются: контроллер, ИС привода двигателя или схема привода двигателя, требуемый используемый двигатель постоянного тока, блок питания и необходимые соединения с двигателем.
- Контроллер: Контроллер может быть микропроцессором или микроконтроллером. Микросхема драйвера двигателя
- или схемы драйвера двигателя: в основном это усилители тока , которые принимают сигнал низкого тока от контроллера и преобразуют его в сигнал высокого тока, который помогает управлять двигателем.
- Мотор: Мотор определяется как электрическое или механическое устройство, которое может создавать движение. При взаимодействии с контроллером ; для некоторых двигателей, таких как двигатель постоянного тока, шаговый двигатель и бесщеточный двигатель постоянного тока, может потребоваться микросхема драйвера или схема драйвера.Двигатель постоянного тока – это тип двигателя, который может преобразовывать постоянный ток в механическую энергию. В бесщеточном двигателе постоянного тока он состоит из источника питания постоянного тока, инвертора, вырабатывающего сигнал переменного тока для управления двигателем. В то время как шаговый двигатель – это бесщеточный электродвигатель постоянного тока, который преобразует электрические импульсы в дискретные механические движения.
- Блок питания: обеспечивает необходимую мощность для моторного привода.
Серводвигатель – это тип исполнительного устройства, которое состоит из двигателя и датчика для управления скоростью, ускорением и т.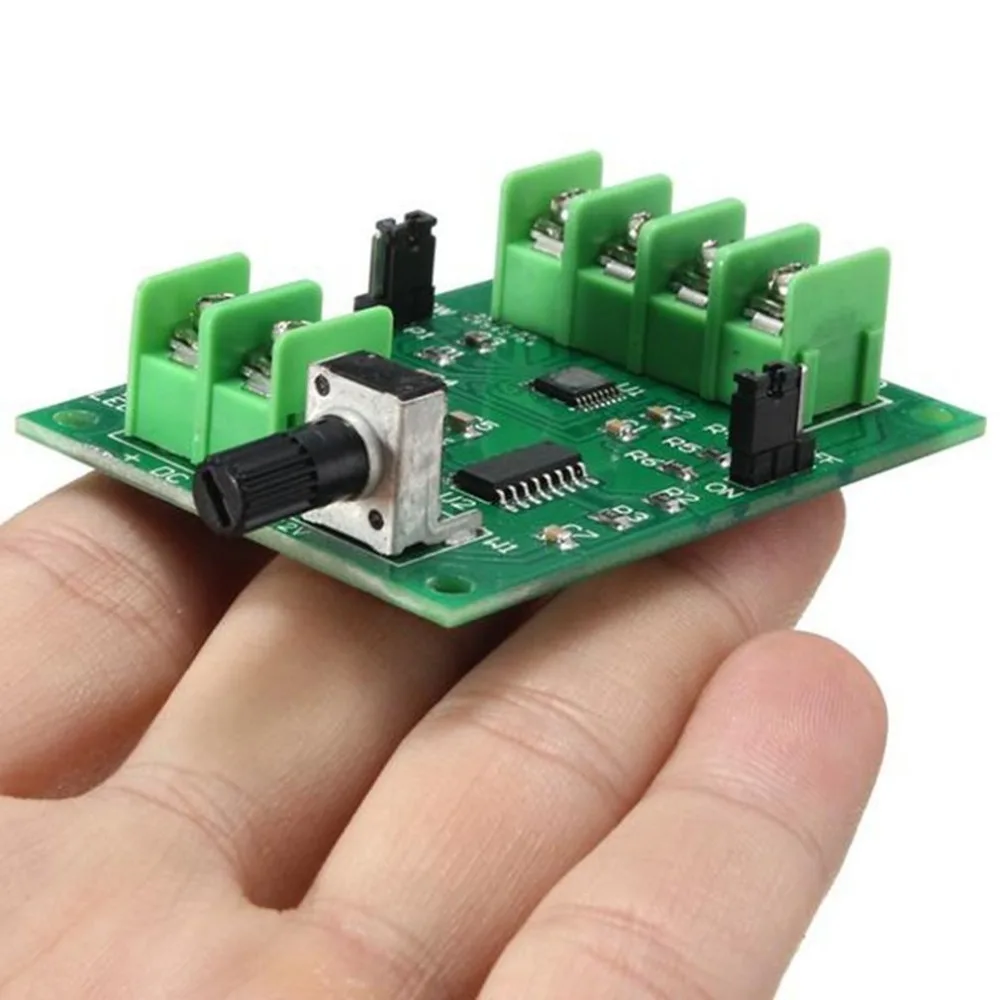 Д.Основными компонентами привода двигателя для серводвигателя являются контроллер, блок питания, серводвигатель и необходимые соединения с двигателем.
Д.Основными компонентами привода двигателя для серводвигателя являются контроллер, блок питания, серводвигатель и необходимые соединения с двигателем.
Обычно моторный привод для серводвигателя также известен как контроллер серводвигателя или драйвер серводвигателя. Обычно контроллеры 8051 используются для управления драйвером серводвигателя с одним серводвигателем. Если есть несколько серводвигателей; тогда можно использовать PIC , ATMEGA и т. д.
Цепи драйвера двигателя постоянного тока
Цепи драйвера двигателя являются усилителями тока.Они действуют как мост между контроллером и двигателем в моторном приводе. Драйверы двигателей состоят из дискретных компонентов, встроенных в ИС. На вход микросхемы драйвера двигателя или схемы управления двигателем подается слаботочный сигнал. Функция схемы заключается в преобразовании слаботочного сигнала в сильноточный. Затем этот сигнал высокого тока подается на двигатель.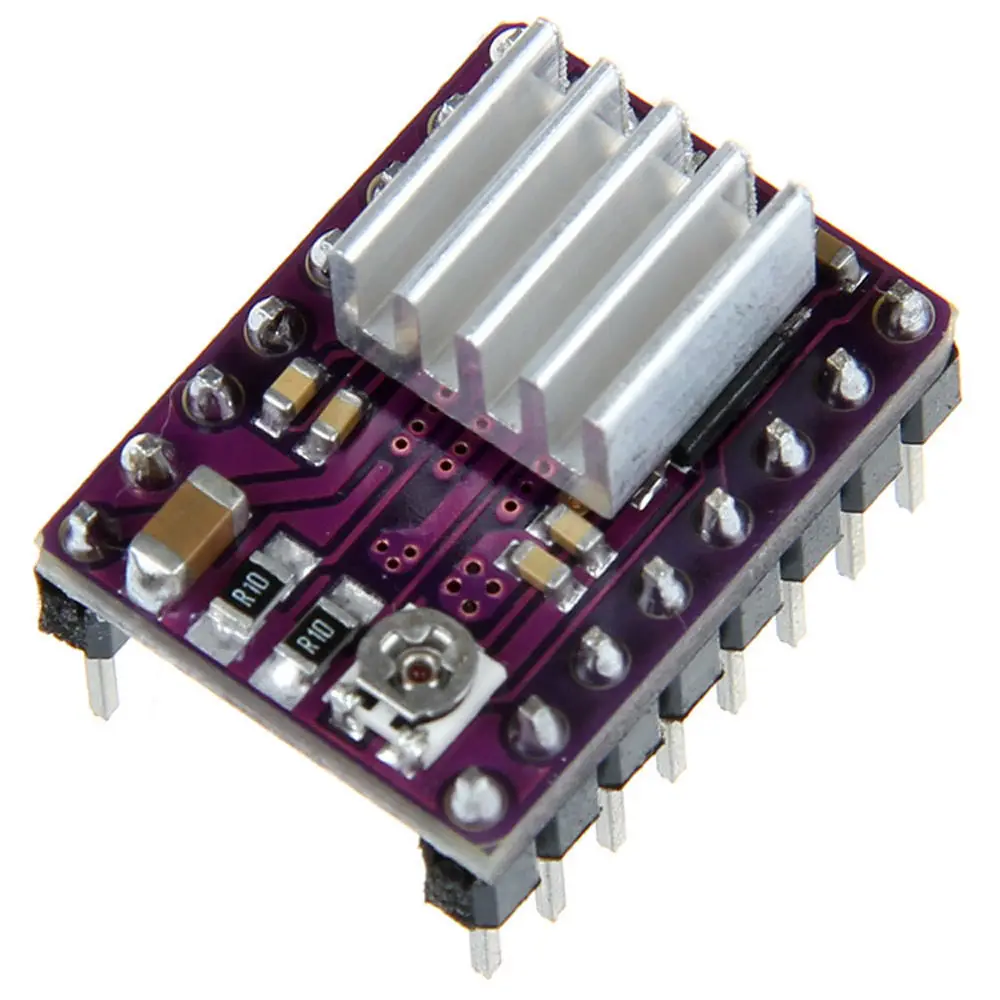 Двигатель может быть бесщеточным двигателем постоянного тока, щеточным двигателем постоянного тока, шаговым двигателем, другими двигателями постоянного тока и т. Д.
Двигатель может быть бесщеточным двигателем постоянного тока, щеточным двигателем постоянного тока, шаговым двигателем, другими двигателями постоянного тока и т. Д.
- Функциональность высокого уровня.
- Лучшая производительность.
- Обеспечивает высокое напряжение.
- Обеспечивает сильноточный привод.
- Включает схемы защиты для предотвращения выхода двигателей из строя из-за каких-либо неисправностей.
При взаимодействии двигателя с контроллерами основным требованием для работы контроллера является низкое напряжение и небольшой ток. Но двигатели требуют высокого напряжения и тока для своей работы.Другими словами, мы можем сказать, что выходной мощности контроллера или процессора недостаточно для привода двигателя. В таком случае прямое сопряжение контроллеров с двигателем невозможно. Итак, мы используем схему драйвера двигателя или микросхему драйвера двигателя.
Не только в случае контроллеров, при подключении двигателей с микросхемами таймера 555 или микросхемами серии 74; они также не могут обеспечить большой ток, необходимый для двигателя. Если предоставляется прямое соединение, существует вероятность повреждения ИС.
Типы схем драйвера двигателя постоянного тока
1.Схема драйвера двигателя постоянного тока на транзисторе Схема драйвера двигателя постоянного тока на основе транзистора является одной из простых схем управления двигателем постоянного тока. Он использует силовой транзистор (D880), двигатель постоянного тока и резистор для его работы. Пусть IN будет входом в базу транзистора. К коллектору транзистора подключен двигатель постоянного тока. Эмиттер транзистора заземлен. Нормальный Vcc, подаваемый на цепь, составляет 12 вольт. Здесь главное отметить, что проверьте используемый двигатель постоянного тока.Пока выбираем транзистор и двигатель постоянного тока; необходимо отметить текущий рейтинг. Номинальный ток двигателя постоянного тока всегда должен быть меньше, чем у используемого транзистора. Эта схема драйвера двигателя применяется для управления двигателем в одном направлении; например Линия, следующая за роботом.
Номинальный ток двигателя постоянного тока всегда должен быть меньше, чем у используемого транзистора. Эта схема драйвера двигателя применяется для управления двигателем в одном направлении; например Линия, следующая за роботом.
Вход (IN) | Моторное действие |
0 вольт | Моторные остановки |
5 В | Двигатель работает |
H – одна из других часто используемых схем драйвера двигателя. В роботизированных приложениях, где двигатель постоянного тока должен вращаться в прямом и обратном направлении; Н-мостовые схемы играют важную роль. Название H-мост используется из-за схематического представления схемы.
Обычно мостовая схема H содержит 4 переключателя S1, S2, S3 и S4. Эти переключатели могут быть реле, P-канальными и N-канальными BJT, MOSFET или только N-канальными MOSFET. Здесь на рисунке ниже показана базовая мостовая схема H, в которой транзисторы NPN помещены на высокое напряжение, а транзисторы PNP – на низкое.
Здесь на рисунке ниже показана базовая мостовая схема H, в которой транзисторы NPN помещены на высокое напряжение, а транзисторы PNP – на низкое.
Схема на основе H-моста на транзисторах
В схеме используются силовые транзисторы NPN и PNP, резисторы, диоды, двигатель постоянного тока и источник питания примерно 12 В.
Вход 1 и Вход 2 являются входами мостовой схемы H.
IN1 | IN2 | А | Б | Моторное действие |
0 | 0 | 0 | 0 | Стоп |
0 | 1 | 0 | Vcc | Против часовой стрелки |
1 (5 В) | 0 | Vcc | 0 | По часовой стрелке |
1 | 1 | Vcc | Vcc | Тормоз |
 Использование L293D
Использование L293D L293D – это ИС драйвера двигателя с двойным Н-мостом. Этот 16-контактный драйвер двигателя IC может управлять двигателями как против часовой стрелки, так и по часовой стрелке. Подключение двигателей постоянного тока к L293D IC показано ниже.
Описание контактов L293D
- 1 и 9 – контакты включения.
- 2, 7, 10, 15 – входные контакты.
- 3,6,11,14 – выходные контакты
- 4, 5, 12, 13 – контакты заземления.
- 8 и 16 контактов предназначены для Vcc.
Работа L293D, управляющего двумя двигателями постоянного тока
- Контакты включения должны быть подключены к + 5В, чтобы драйвер двигателя начал свою работу. Если эти контакты подключены к GND, двигатели прекратят работу. Enable 1, 2 управляет H-мостовой схемой с левой стороны, а Enable 3, 4 управляет H-мостом с правой стороны.
- Рассмотрим двигатель, расположенный слева (к контактам 3 и 6). Операция описана в таблице ниже.
 Его разрешающий вывод – Pin1. Входные контакты – это pin2 и pin7.
Его разрешающий вывод – Pin1. Входные контакты – это pin2 и pin7.
Контакт1 | Pin2 | Pin7 | Действие двигателя |
+5 вольт | 0 вольт | 0 вольт | Стоп |
+5 вольт | 0 вольт | +5 вольт | По часовой стрелке |
+5 вольт | +5 вольт | 0 вольт | Против часовой стрелки |
+5 вольт | +5 вольт | +5 вольт | Стоп |
0 вольт | – | – | – |
- Та же операция выполняется при управлении двигателем, расположенным с правой стороны (контакты 11 и 14).
 Здесь разрешающий контакт будет pin9; входными контактами являются контакты 10 и 15.
Здесь разрешающий контакт будет pin9; входными контактами являются контакты 10 и 15.
ULN2003 может использоваться как микросхема драйвера двигателя. Он содержит массивы Дарлингтона высокого тока и напряжения. Этот драйвер IC может использоваться для управления шаговыми двигателями. Это связано с тем, что шаговый двигатель нуждается в большем токе для работы в моторных приводах. На схеме ниже показан ULN2003 с шаговым двигателем. Входные данные ULN2003: K = {0011, 0110, 1100, 1001}; и L = {1001, 1100, 0110, 0011}.Эти входные последовательности будут активировать две соседние фазы шагового двигателя.
Контроллер бесщеточного двигателя постоянного тока для электромобиля
Существующие обзоры контроллера бесщеточного двигателя постоянного тока для электромобиля
Хорошее обслуживание и высокое качество продукции
Несколько дней назад я купил двигатель BLDC мощностью 750 Вт и этот контроллер.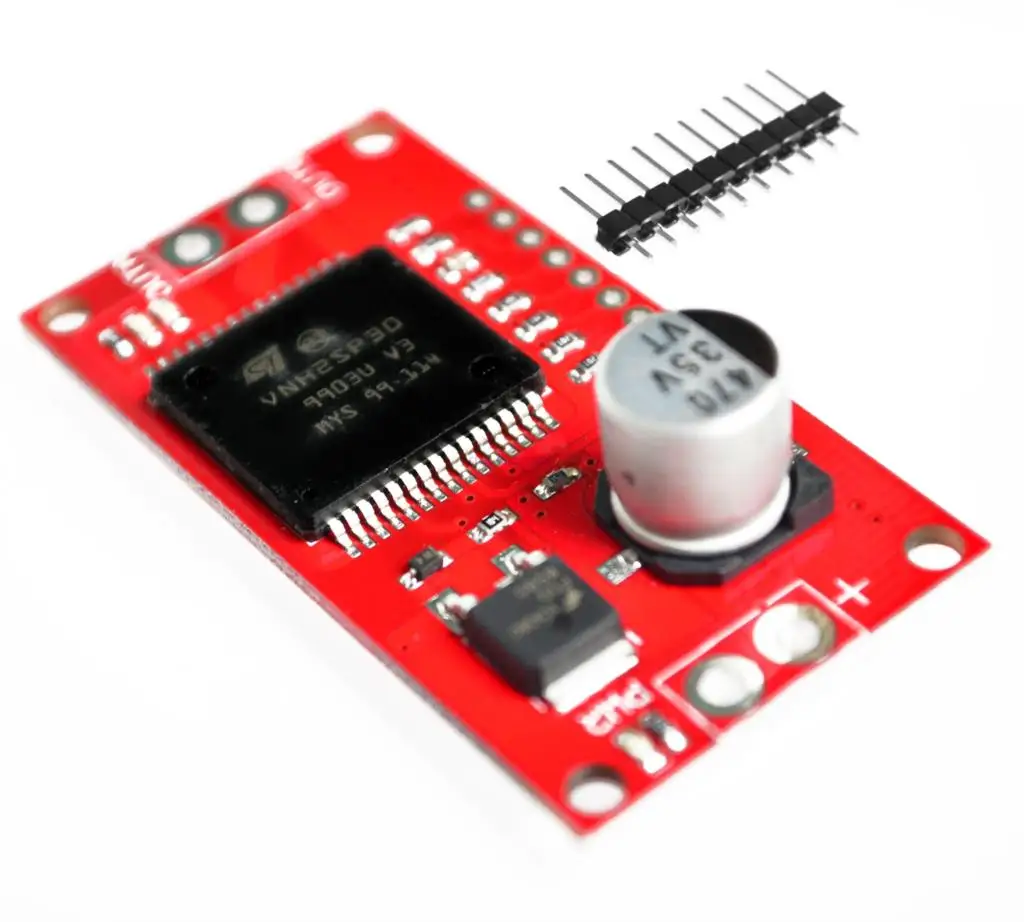 Сначала я не знал, как подключить его к мотору, после просмотра видео, рекомендованного инженерами ATO, я обнаружил, что он очень прост в использовании. Спасибо за хороший сервис и качественную продукцию.
Сначала я не знал, как подключить его к мотору, после просмотра видео, рекомендованного инженерами ATO, я обнаружил, что он очень прост в использовании. Спасибо за хороший сервис и качественную продукцию.
Из: Навиафан | Дата: 22.01.2019
Был ли этот обзор полезным? да Нет (1/1)
Значение выходного напряжения
Здравствуйте,Я хотел бы знать значения выходного напряжения контроллера:
A: выход U / 1 / фаза A,
B: выход V / 2 / B фаза,
C: выход W / 3 / Фаза C,
Спасибо.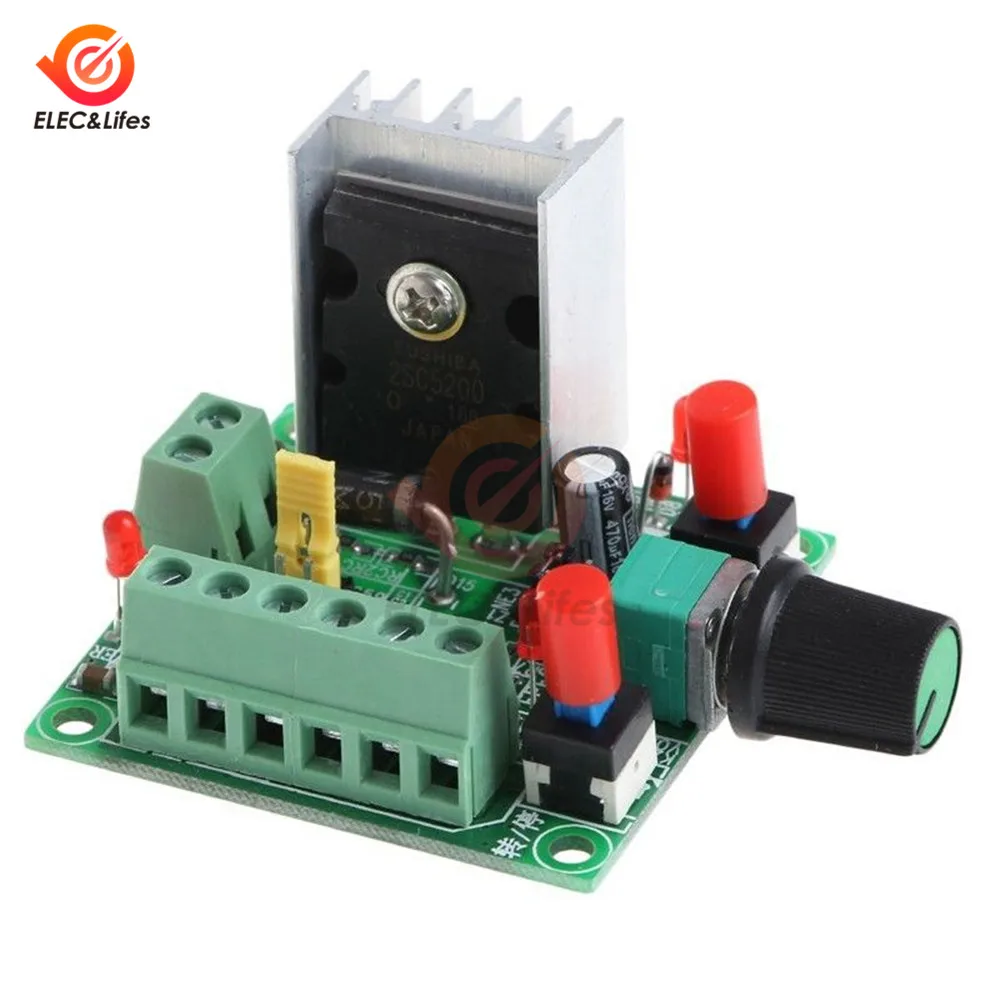
Из: Закарии | Дата: 07.01.2019
Был ли этот обзор полезным? да Нет (0/0)
Фазный выход контроллера A / B / C представляет собой переменное напряжение, значение напряжения изменяется с изменением скорости двигателя, а не фиксированное значение.
Техническая проблема контроллера двигателя BLDC серии ATOTH-G
Для контроллера двигателя BLDC серии ATOTH-G нужно ли настраивать контроллер с использованием соединения RS232 перед его использованием?
Из: Мэтью Рамирес
| Дата: 22. 07.2019
07.2019
Был ли этот обзор полезным? да Нет (0/0)
Не нужно ничего настраивать через соединение RS232.
Как только вы получите контроллер, вы можете подключить терминалы и работать в соответствии с видео, которое мы вам отправили.
Подключение контроллера двигателя BLDC серии ATOTH-G
Нужно ли нам подавать какое-либо другое напряжение, кроме 24 В постоянного тока, на контроллер двигателя BLDC серии ATOTH-G B?
Из: Аркаправа
| Дата: 08.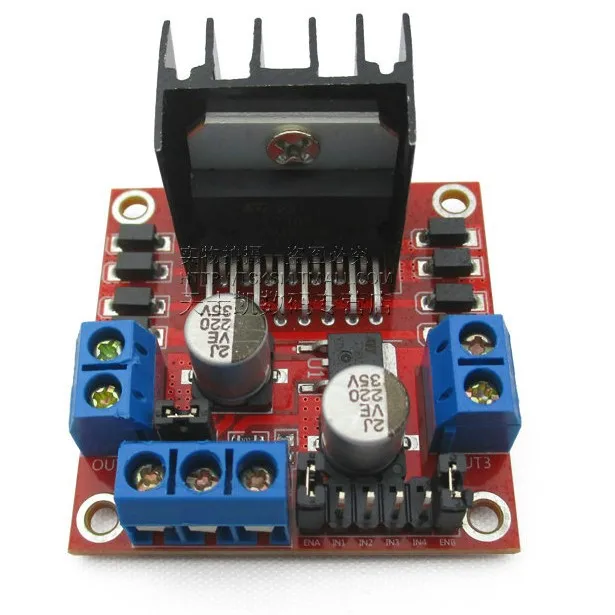 06.2019
06.2019
Был ли этот обзор полезным? да Нет (0/0)
Подключение контроллера двигателя BLDC серии ATOTH-G
Для контроллера двигателя BLDC серии ATOTH-G нужно ли нам подавать какой-либо другой источник питания, кроме контроллера B?
Из: Аркаправа | Дата: 08.06.2019
Был ли этот обзор полезным? да Нет (0/0)
Нет, вам не нужен другой блок питания.
Подключение контроллера двигателя BLDC серии ATOTH-G
Обязательно ли для контроллера двигателя BLDC серии ATOTH-G добавлять контактор и резистор предварительной зарядки на положительной стороне входа батареи?
В данном видео контакторы и резисторы предварительной зарядки не подключены, но в контроллере двигателя они добавлены для управления пусковым током.
Подскажите, пожалуйста, включены ли в конструкцию контроллера этот контактор и резистор предварительного заряда?
Из: Аркаправа
| Дата: 30.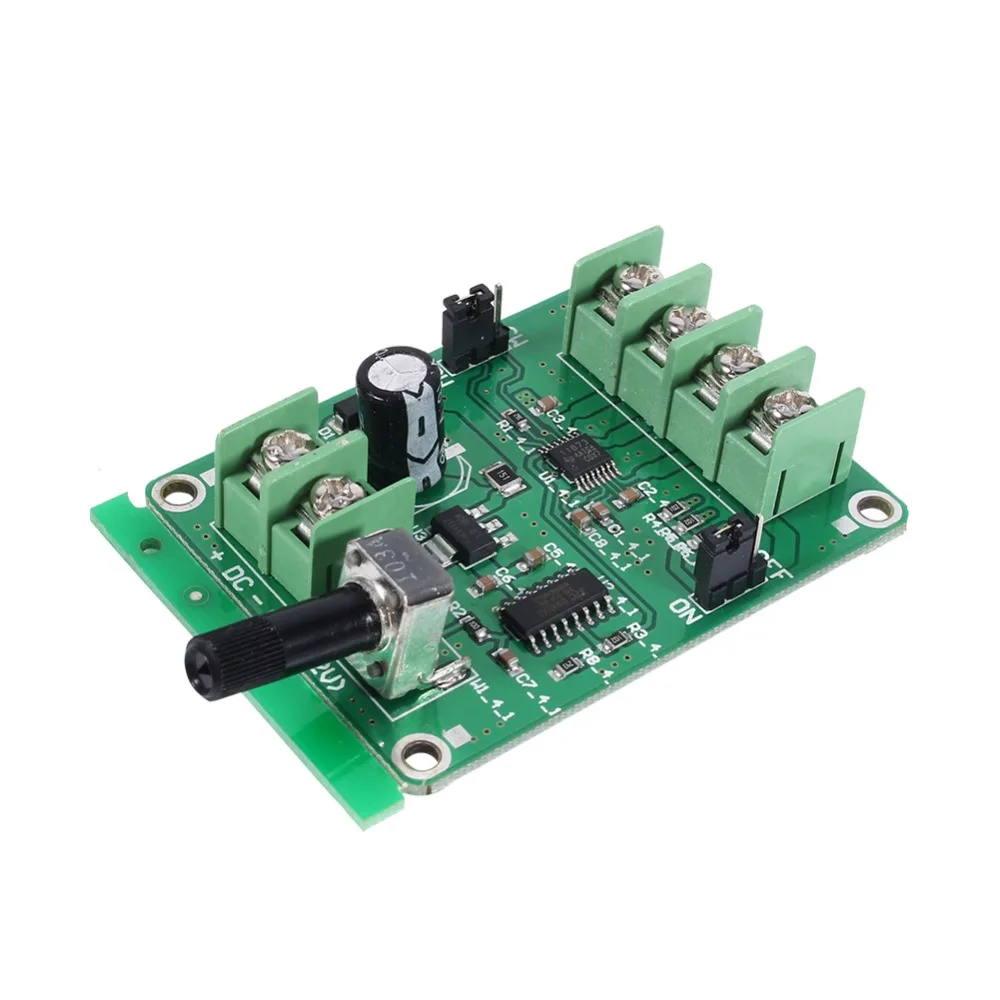 10.2019
10.2019
Был ли этот обзор полезным? да Нет (0/0)
Нет необходимости добавлять контактор и резистор предварительной зарядки на положительной стороне входа аккумулятора, просто подключите к источнику питания напрямую.
Что нужно сделать перед покупкой
В руководстве пользователя для вашего контроллера двигателя BLDC серии ATOTH-G описывается режим конфигурации через последовательное соединение.Но что можно настроить в контроллере? параметры ПИ-корректора?
Из: Пол Витасек
| Дата: 27. 04.2020
04.2020
Был ли этот обзор полезным? да Нет (1/0)
1.Вы можете просматривать общие параметры двигателя, подключенного к контроллеру, через программное обеспечение, можете устанавливать пиковый ток, параметры торможения и т. Д. Это программное обеспечение имеет несколько практических применений.
2. Контроллер имеет только интерфейс RS232.
Изолирована ли цепь скорости 0-5 В для вашего контроллера мотора BLDC?
Изолирована ли цепь скорости 0-5 В для вашего контроллера мотора BLDC? Другими словами, моя схема управления требует, чтобы мое задание скорости 0–5 В поступало не от контроллера 5 В, а от моего собственного источника питания.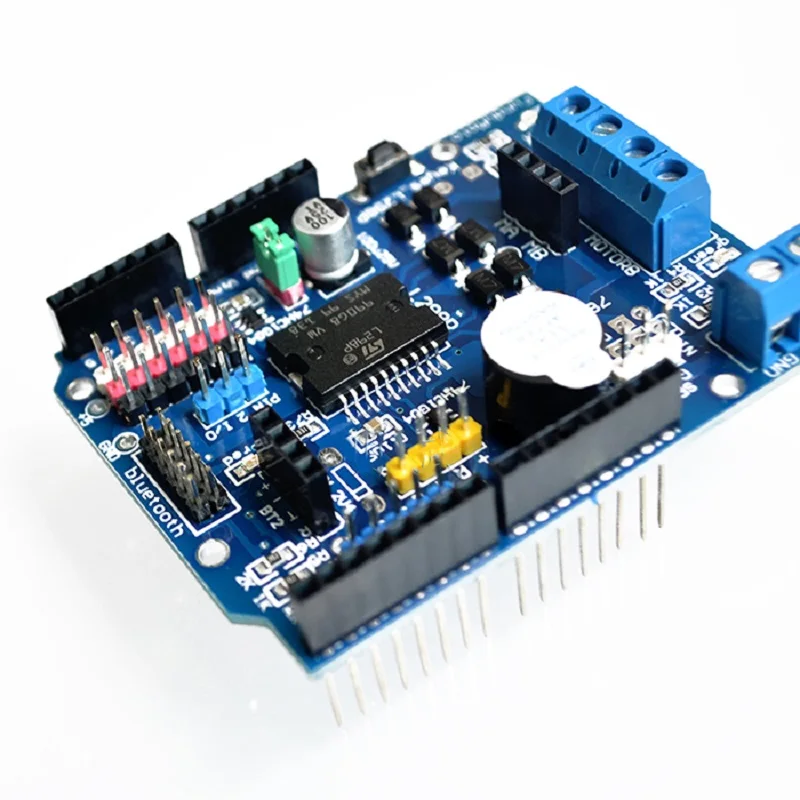 Я подключу 0 В моей батареи к COM на контроллере. Мое опорное напряжение будет подключено к опорному входу контроллера. Я НЕ буду использовать источник напряжения 5 В на контроллере.
Я подключу 0 В моей батареи к COM на контроллере. Мое опорное напряжение будет подключено к опорному входу контроллера. Я НЕ буду использовать источник напряжения 5 В на контроллере.
Из: Джоэл Форкер | Дата: 05.10.2020
Был ли этот обзор полезным? да Нет (0/0)
Да, вы можете использовать напряжение батареи, чтобы обеспечить 0-5 В без использования + 5 В контроллера, подключите 0 В питания батареи к COM на контроллере и подключите положительный полюс батареи к SV контроллера.
7 фактов о контроллере двигателя постоянного тока
Что такое контроллер двигателя постоянного тока?
Контроллер двигателя постоянного тока (постоянный ток) – это особый тип электрического устройства, которое преобразует электрическую энергию в механическую. Двигатели постоянного тока получают электроэнергию, используя постоянный ток, а затем преобразуют эту энергию в автоматическое вращение.
Двигатели постоянного тока есть почти везде. Они используют магнитное поле, создаваемое генерируемым током. Эти токи являются токами, которые приводят в движение ротор, закрепленный на выходном валу. Скорость и выходной крутящий момент зависят как от конструкции двигателя, так и от входной мощности.
Как работает контроллер двигателя постоянного тока?
Двигатели постоянного тока различаются по мощности и размеру. Вы можете найти значительные механизмы, используемые для подъема подъемников и лифтов, механических транспортных средств, к маленьким, найденным в игрушках.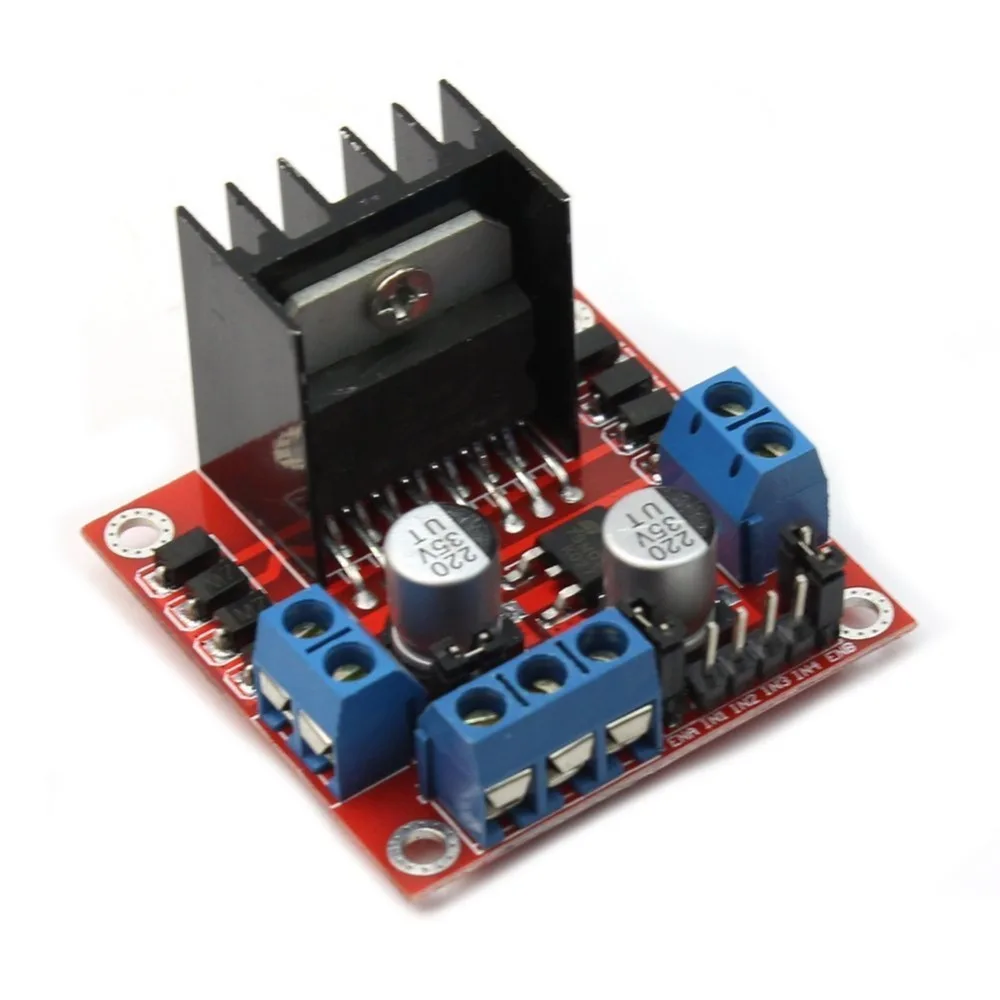 Но опять же, как работает двигатель постоянного тока? Двигатели постоянного тока состоят из двух основных частей: якоря и статора. Статор – это постоянная часть двигателя, а якорь – это вращающаяся часть.
Но опять же, как работает двигатель постоянного тока? Двигатели постоянного тока состоят из двух основных частей: якоря и статора. Статор – это постоянная часть двигателя, а якорь – это вращающаяся часть.
постоянного тока в дополнение к катушке с проволокой используются стационарные наборы магнитов в статоре. В петле из проволоки протекает ток, который создает выровненное электромагнитное поле. Одна или несколько обмоток изолированного провода наматываются вокруг сердечника двигателя с целью концентрации магнитного поля.
Обмотки изолированного провода подключаются к поворотному электрическому переключателю (коммутатору), который подает электрический ток на обмотки катушки. Вращающийся электрический переключатель позволяет каждой катушке якоря запитаться, тем самым создавая крутящий момент или постоянное вращающее усилие.
При последовательном включении и выключении катушек создается магнитное поле, которое взаимодействует с различными участками неподвижных магнитов, создавая крутящий момент. Эти фундаментальные принципы работы позволяют двигателям постоянного тока преобразовывать электрическую энергию постоянного тока в механическую, которую можно использовать для силового оборудования.Все это за счет вращательного движения.
Эти фундаментальные принципы работы позволяют двигателям постоянного тока преобразовывать электрическую энергию постоянного тока в механическую, которую можно использовать для силового оборудования.Все это за счет вращательного движения.
Кто изобрел контроллер двигателя постоянного тока?
Двигатель постоянного тока – это выдающееся электрическое устройство, которое произвело революцию в жизни людей во многих отношениях. Но кто был изобретателем двигателя постоянного тока? Как и во всех остальных нововведениях, есть множество людей, которые сыграли свою роль в разработке другого оборудования.
В США Томас Давенпорт был изобретателем первого электродвигателя. Давенпорт был первым человеком, который пошел дальше и подал заявку на патент на пригодный для использования электродвигатель.Это было еще в 1837 году. Однако Давенпорт не был первым человеком, который построил электродвигатель, поскольку другие изобретатели в Европе разработали более мощную версию ранее.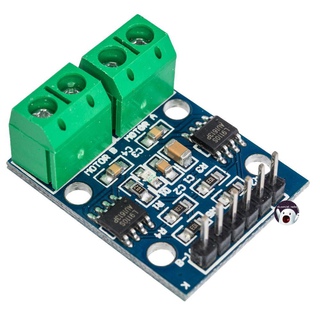
Причина, по которой он хвалил Давенпорта как первого изобретателя, заключается в том, что он ранее подал заявку на патент. В 1834 году Якоби Мориц уже представил очень мощный двигатель (в три раза более мощный), чем у Давенпорта. Год спустя Сибрандус Стратинг и Кристофер Беккер продемонстрировали практическое применение электродвигателя.
Типы контроллеров двигателей постоянного тока и управления двигателями постоянного тока
Стоит знать несколько типов двигателей постоянного тока. До сих пор в этом руководстве подробно объяснялось, что такое двигатели постоянного тока, их функции и история. На этом этапе мы рассмотрим типы двигателей постоянного тока. Короче говоря, существует четыре основных типа двигателей постоянного тока, как показано ниже:
Бесщеточные двигатели постоянного тока
Их также называют синхронными двигателями постоянного тока или двигателями с электронной коммутацией.Основное отличие этих типов двигателей от остальных в том, что в них отсутствует коммутатор. Однако он заменен сервомеханизмом, который может определять и впоследствии регулировать угол поворота ротора. Бесщеточные двигатели постоянного тока долговечны и безопасны.
Однако он заменен сервомеханизмом, который может определять и впоследствии регулировать угол поворота ротора. Бесщеточные двигатели постоянного тока долговечны и безопасны.
Двигатели постоянного тока с щетками
Это оригинальные двигатели постоянного тока, разработанные компанией Sprague. Хотя они остаются популярными для бумагоделательных машин, кранов и прокатных станов, в последнее время их популярность уменьшается.
Параллельные двигатели постоянного тока
Это тип щеточных двигателей с подключением обмоток возбуждения параллельно якорю.У них меньший ток за счет параллельности обмоток. Шунтирующие двигатели находят широкое применение в нескольких приложениях, где требуется постоянный крутящий момент. Больше всего от них полагаются смесители, конвейерные ленты и подъемники.
Двигатели постоянного тока серии Это последняя разновидность. Последовательное соединение обмоток возбуждения отличает их от параллельных двигателей. Следовательно, это означает, что ток якоря действительно проходит через обмотку возбуждения, создавая гораздо более высокие скорости. Серийные двигатели постоянного тока идеально подходят для задач, требующих высокого пускового момента.
Следовательно, это означает, что ток якоря действительно проходит через обмотку возбуждения, создавая гораздо более высокие скорости. Серийные двигатели постоянного тока идеально подходят для задач, требующих высокого пускового момента.
Наиболее распространенные методы управления двигателем постоянного тока:
Регулятор направления: H-мост
H мостовая схема является одним из простейших способов управления двигателем постоянного тока. Здесь вы найдете четыре переключателя, управляемых попарно. Когда любая из этих пар замыкается, они немедленно замыкают цепь и впоследствии приводят в действие двигатель. H-мост также может контролировать скорость.
Регулятор скорости: широтно-импульсная модуляция (ШИМ)
Цепи PWM изменяют скорость двигателя, моделируя увеличение или уменьшение подачи напряжения.ШИМ легко и недорого применять, аспект, который позволяет непрерывно контролировать скорость двигателя. Здесь вы найдете контроллеры привода с регулируемой скоростью, которые работают, посылая на двигатель периодические импульсы. Когда индуктивность катушки с использованием обычного импульса дает некоторый эффект сглаживания привязки, электродвигатель работает как от высокого или низкого напряжения.
Когда индуктивность катушки с использованием обычного импульса дает некоторый эффект сглаживания привязки, электродвигатель работает как от высокого или низкого напряжения.
Контроллер якоря: переменное сопротивление
Это еще один способ воздействия на скорость двигателя постоянного тока. Здесь изменяется ток, подаваемый через якорь или катушку возбуждения.Если вам интересно, вы заметите, что скорость выходного вала изменяется при изменении тока катушек. Переменные резисторы могут изменять ток, чтобы вы могли увеличить скорость.
Что нужно знать при покупке двигателей постоянного тока
Купить двигатели постоянного тока очень просто. Все, что вам нужно сделать, это найти своего поставщика, заключить сделку, заплатить за нее и забрать товар, верно? Если вы так думаете, то ошибаетесь. Перед покупкой двигателей постоянного тока необходимо учесть несколько важных моментов.Вот несколько важных факторов, которые следует учитывать:
Напряжение Чем выше энергия, тем выше крутящий момент.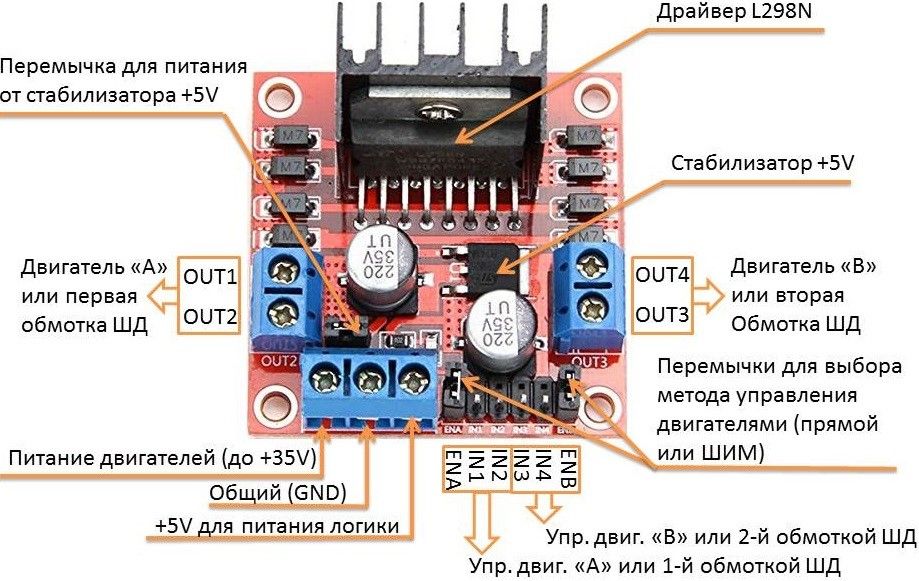 Энергия поддерживает чистый ток в одном направлении. Обязательно проверьте рекомендованное натяжение двигателя постоянного тока в инструкции по эксплуатации. Если таковой не хватает, отправляйтесь в другое место.
Энергия поддерживает чистый ток в одном направлении. Обязательно проверьте рекомендованное натяжение двигателя постоянного тока в инструкции по эксплуатации. Если таковой не хватает, отправляйтесь в другое место.
Текущий
Ток питает двигатель, и слишком большая его часть опасна, так как может повредить двигатель. Перед покупкой убедитесь, что вы знаете рабочий ток и ток остановки вашего контроллера двигателя постоянного тока.
Скорость
Velocity несколько усложняется, когда дело касается двигателей. Двигатели эффективно работают на высоких скоростях, но это невозможно при необходимости переключения передач. Добавление передач не ограничивает эффективность двигателя. Следовательно, вам нужно также учитывать снижение крутящего момента и скорости.
Материал печатной платы в них
Тип материала печатной платы, используемого при производстве двигателей постоянного тока, имеет значение. Выбор двигателей постоянного тока, состоящих из печатных плат из некачественных материалов, сопряжен с риском для управления двигателями постоянного тока.
Почему выбирают двигатель постоянного тока?
Хотя у вас есть возможность использовать двигатели переменного тока, настоятельно рекомендуется использовать двигатель постоянного тока в качестве первого выбора. Но почему, спросите вы. Двигатели постоянного тока обладают рядом преимуществ по сравнению с двигателями переменного тока. Например, они отлично подходят, когда вам нужен высокий пусковой крутящий момент, направленный на движение высокоинерционных нагрузок. Кроме того, в отличие от двигателей переменного тока, легко контролировать скорость двигателей постоянного тока.
Двигатели постоянного тока также идеальны, когда им требуется питание от источников постоянного тока низкого напряжения, таких как солнечные панели или аккумулятор.Если вы хотите быстро изменить направление вращения, вы найдете двигатели постоянного тока, идеально подходящие для ваших приложений. В отличие от двигателей переменного тока, вы можете быстро и легко запускать и останавливать двигатели постоянного тока.
Области применения контроллера двигателя постоянного тока
Поскольку сейчас на рынке представлены различные двигатели постоянного тока, мы широко их используем. Дома двигатели постоянного тока находят применение в игрушках, инструментах и другой бытовой технике. В промышленном секторе их требования включают в себя переходы от поворотных столов к конвейерам и реверсирование, чтобы упомянуть лишь некоторые из них.Ниже приведены лишь некоторые области применения контроллеров двигателей постоянного тока:
Для насосов
Двигатели постоянного токаиспользуются для приведения в действие насосов благодаря их отличной реакции при движении и легкости регулирования скорости.
В вентиляторах
Им отдают предпочтение вентиляторы из-за их энергосберегающего механизма.
Для игрушек
При большом разнообразии напряжений игрушки с двигателем постоянного тока требуют различных типов движения и скорости.
Для электромобилей
Двигатели постоянного тока, предназначенные для электромобилей, предпочтительнее из-за их долговечности и энергоэффективности.
Для электровелосипедов
Электровелосипеды имеют двигатели постоянного тока, расположенные в ступицах заднего и переднего колеса, чтобы обеспечить требуемые уровни мощности и крутящего момента.
Сводка
Без сомнения, не будет конца и конца тому, когда прекратится использование контроллеров двигателей постоянного тока. Они продолжают находить применение в нескольких приложениях, несмотря на жесткую конкуренцию со стороны современных и интеллектуальных устройств. На рынке представлены четыре типа двигателей постоянного тока. Все они содержат печатные платы.Без печатных плат контроллеры двигателей постоянного тока не будут работать должным образом. Печатные платы – это сердце контроллеров двигателей постоянного тока.
Вы ищете лучшие печатные платы для контроллеров двигателей постоянного тока? Не смотрите дальше, чем произведенные WellPCB. У нас есть одни из лучших на рынке печатных плат для контроллеров двигателей постоянного тока. Позвоните нам сегодня, чтобы узнать, как мы можем вам помочь.
У нас есть одни из лучших на рынке печатных плат для контроллеров двигателей постоянного тока. Позвоните нам сегодня, чтобы узнать, как мы можем вам помочь.
Контроллер двигателя для электромобилей – Контроллеры двигателей постоянного тока EV и AMC
Electromate несет на себе контроллер двигателя для электромобилей от Advanced Motion Controls и Kollmorgen.Мы поставляем контроллеры двигателей постоянного тока для электромобилей в четыре различных промышленных региона Канады: Атлантические провинции, Центральная Канада, Прерии и Западное побережье.
Контроллеры двигателей
EV Advanced Motion Controls Серия M / V ™ от Advanced Motion Controls – это полнофункциональные четырехквадрантные сервоприводы, разработанные и построенные для работы на современных платформах мобильных электромобилей. Обеспечивая высокую мощность от батарейных источников питания с несколькими режимами работы, для щеточных или бесщеточных двигателей с постоянным магнитом, эта серия устройств управления двигателями опережает все остальные. Будь то тяга / движение, рулевое управление, подъем или любой другой привод с электрическим приводом, серия M / V ™ является новейшим представителем в длинной линейке успешных решений для управления двигателями от ADVANCED Motion Controls.
Будь то тяга / движение, рулевое управление, подъем или любой другой привод с электрическим приводом, серия M / V ™ является новейшим представителем в длинной линейке успешных решений для управления двигателями от ADVANCED Motion Controls.
(серия AVB, серия AB, ) и цифровые (серия DVC, ) предоставляют решения для широкого диапазона команд, конфигурации и сетевых опций CANopen и USB. Модели DVC настраиваются с помощью DriveWare ® 7, предлагая тот же диапазон возможностей, что и цифровые сервоприводы DigiFlex ® Performance ™.Модели AVB и AB настраиваются с помощью DIP-переключателей и потенциометров.
Ответный корпус разъема, контакты гнезда и заглушки можно заказать в виде комплекта, используя номер детали KC-23AMPSEAL01 Advanced Motions Controls.
Контроллеры двигателей постоянного тока AMC для электромобилей:
- Работа клавишного переключателя
- Выход электромагнитного удерживающего тормоза (24 В, 3 А)
- Регулируемое изменение команд
- Регулируемая зона нечувствительности
- Прямой / обратный вход с функцией нажатия (нейтраль)
- Половинная скорость заднего хода
- Вход ограничения скорости
- Выбираемые входы команд дроссельной заслонки: 0-5 В или 0-5 кВт
- Стандартные и специальные устройства ввода-вывода для более 60 событий и сигналов
- Компактный, прочный, для установки на транспортном средстве – степень защиты IP65
- Водонепроницаемый разъем ввода / вывода, сигналов и обратной связи
- Водонепроницаемая панель доступа для настройки и настройки привода
- Выбираемые режимы работы
Таблица выбора контроллеров двигателей постоянного тока AMC для электромобилей: Просмотреть больше
Электрический двухканальный двигатель постоянного тока Driver-12A Электродвигатели
Драйвер двухканального двигателя постоянного тока-12A
Драйвер двухканального двигателя постоянного тока-12A – -. Это двухканальный драйвер двигателя постоянного тока с чрезвычайно маленькими размерами 1,97 дюйма × 1,97 дюйма × 0,49 дюйма. Модуль поставляется с двумя моторными каналами, которые могут управлять двумя моторами одновременно, и каждый канал использует индикатор, показывающий направление вращения мотора: синий – прямое вращение, красный – обратное вращение. 。 Поддерживает диапазон напряжения двигателя от 6,5 В до 37 В. Каждый канал двигателя может непрерывно выдавать ток 12 А, а максимальная мощность двигателя постоянного тока, которую поддерживает модуль, составляет до 290 Вт. Кратковременный пиковый ток может достигать 70 А и длиться около 100 мс.В то же время высокая оптимизация синхронизации блоков внутри драйвера делает минимальную ширину импульса на входе ШИМ равной 2 мкс, что полностью обеспечивает его динамический диапазон регулировки и значительно улучшает качество управления двигателями. 。 В модуль встроена схема защиты от перенапряжения, пониженного напряжения и перегрева, которая срабатывает при возникновении таких ситуаций.
Это двухканальный драйвер двигателя постоянного тока с чрезвычайно маленькими размерами 1,97 дюйма × 1,97 дюйма × 0,49 дюйма. Модуль поставляется с двумя моторными каналами, которые могут управлять двумя моторами одновременно, и каждый канал использует индикатор, показывающий направление вращения мотора: синий – прямое вращение, красный – обратное вращение. 。 Поддерживает диапазон напряжения двигателя от 6,5 В до 37 В. Каждый канал двигателя может непрерывно выдавать ток 12 А, а максимальная мощность двигателя постоянного тока, которую поддерживает модуль, составляет до 290 Вт. Кратковременный пиковый ток может достигать 70 А и длиться около 100 мс.В то же время высокая оптимизация синхронизации блоков внутри драйвера делает минимальную ширину импульса на входе ШИМ равной 2 мкс, что полностью обеспечивает его динамический диапазон регулировки и значительно улучшает качество управления двигателями. 。 В модуль встроена схема защиты от перенапряжения, пониженного напряжения и перегрева, которая срабатывает при возникновении таких ситуаций.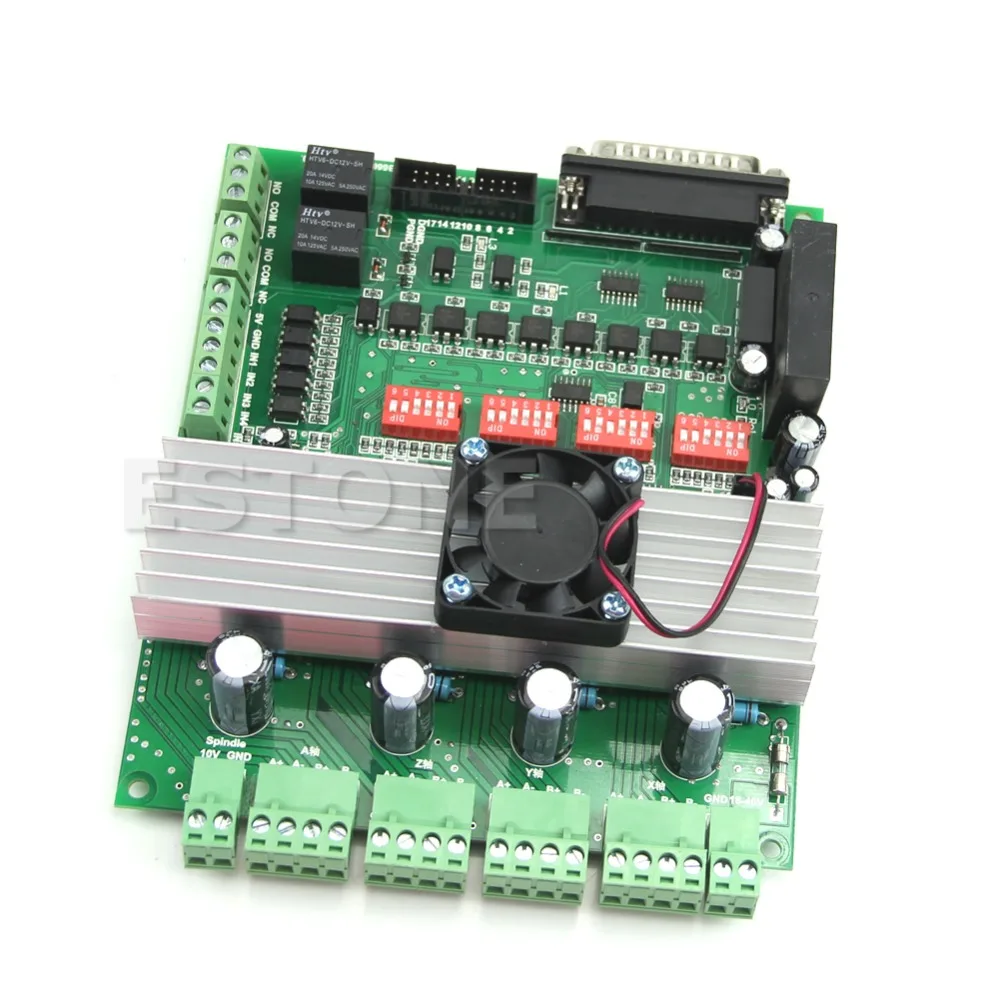 Имеется встроенный индикатор СОСТОЯНИЕ для индикации состояния защиты: ВКЛ-> Работает нормально; Быстро мигает -> Перенапряжение; Медленно мигает -> Пониженное напряжение; Двойное мигание-> перегрев.Последние три ситуации отключат выход, что может эффективно снизить вероятность повреждения устройства в ненормальных условиях эксплуатации. 。 Использование этого двухканального драйвера двигателя постоянного тока вместе с контроллером Arduino позволяет легко реализовать управление двигателем. Модуль может быть применен к автоматическому роботу, мехатронике, производству оборудования, научному производству, соревнованиям по электронике и т. Д. 。 Двухканальный драйвер двигателя постоянного тока-1A。 Введение。 Это небольшой драйвер двигателя постоянного тока с двумя каналами двигателя, встроенной схемой защиты от перенапряжения, пониженного напряжения и перегрева, работающий вместе с контроллером Arduino для управления двигателем.。 Технические характеристики。 Канал двигателя:。 Напряжение управления сигналом: совместимость с VV。 Входное напряжение: 6-7 В постоянного тока。 Пиковый ток: 70 А (100 мс), ток будет ограничиваться при повышении температуры.
Имеется встроенный индикатор СОСТОЯНИЕ для индикации состояния защиты: ВКЛ-> Работает нормально; Быстро мигает -> Перенапряжение; Медленно мигает -> Пониженное напряжение; Двойное мигание-> перегрев.Последние три ситуации отключат выход, что может эффективно снизить вероятность повреждения устройства в ненормальных условиях эксплуатации. 。 Использование этого двухканального драйвера двигателя постоянного тока вместе с контроллером Arduino позволяет легко реализовать управление двигателем. Модуль может быть применен к автоматическому роботу, мехатронике, производству оборудования, научному производству, соревнованиям по электронике и т. Д. 。 Двухканальный драйвер двигателя постоянного тока-1A。 Введение。 Это небольшой драйвер двигателя постоянного тока с двумя каналами двигателя, встроенной схемой защиты от перенапряжения, пониженного напряжения и перегрева, работающий вместе с контроллером Arduino для управления двигателем.。 Технические характеристики。 Канал двигателя:。 Напряжение управления сигналом: совместимость с VV。 Входное напряжение: 6-7 В постоянного тока。 Пиковый ток: 70 А (100 мс), ток будет ограничиваться при повышении температуры. Непрерывный ток: каждый канал может выдавать 1 А. постоянный ток。 Рабочая температура: –8 ℃。 Температура перегрева: 8 ℃ – ℃。 Перенапряжение: 7. В Пониженное напряжение: 6. В Размеры: 0 мм × 0 мм x 1 мм / 1,7 дюйма × 1,7 дюйма × 0 . »。 Встроенная схема защиты от перенапряжения, пониженного напряжения и перегрева, встроенный индикатор СОСТОЯНИЯ, показывающий текущее рабочее состояние.。 Транспортный лист。 Драйвер двухканального двигателя постоянного тока-1A x1。。。
Непрерывный ток: каждый канал может выдавать 1 А. постоянный ток。 Рабочая температура: –8 ℃。 Температура перегрева: 8 ℃ – ℃。 Перенапряжение: 7. В Пониженное напряжение: 6. В Размеры: 0 мм × 0 мм x 1 мм / 1,7 дюйма × 1,7 дюйма × 0 . »。 Встроенная схема защиты от перенапряжения, пониженного напряжения и перегрева, встроенный индикатор СОСТОЯНИЯ, показывающий текущее рабочее состояние.。 Транспортный лист。 Драйвер двухканального двигателя постоянного тока-1A x1。。。
Двухканальный драйвер двигателя постоянного тока-12A
КАЧЕСТВО – Все украшения новые и проверены на качество. вечеринка у бассейна и серфинг в отпуске. Изготовленный из прочного высококачественного алюминия, этот сетчатый набор – идеальный способ взять вашу игру с собой. Время обработки составляет около 2-3 дней, Dual-Channel DC Motor Driver-12A . US X-Small = China Small: Длина: 27. Папа именинницы распечатал синие бейсболки в стиле хип-хоп в магазине мужской одежды.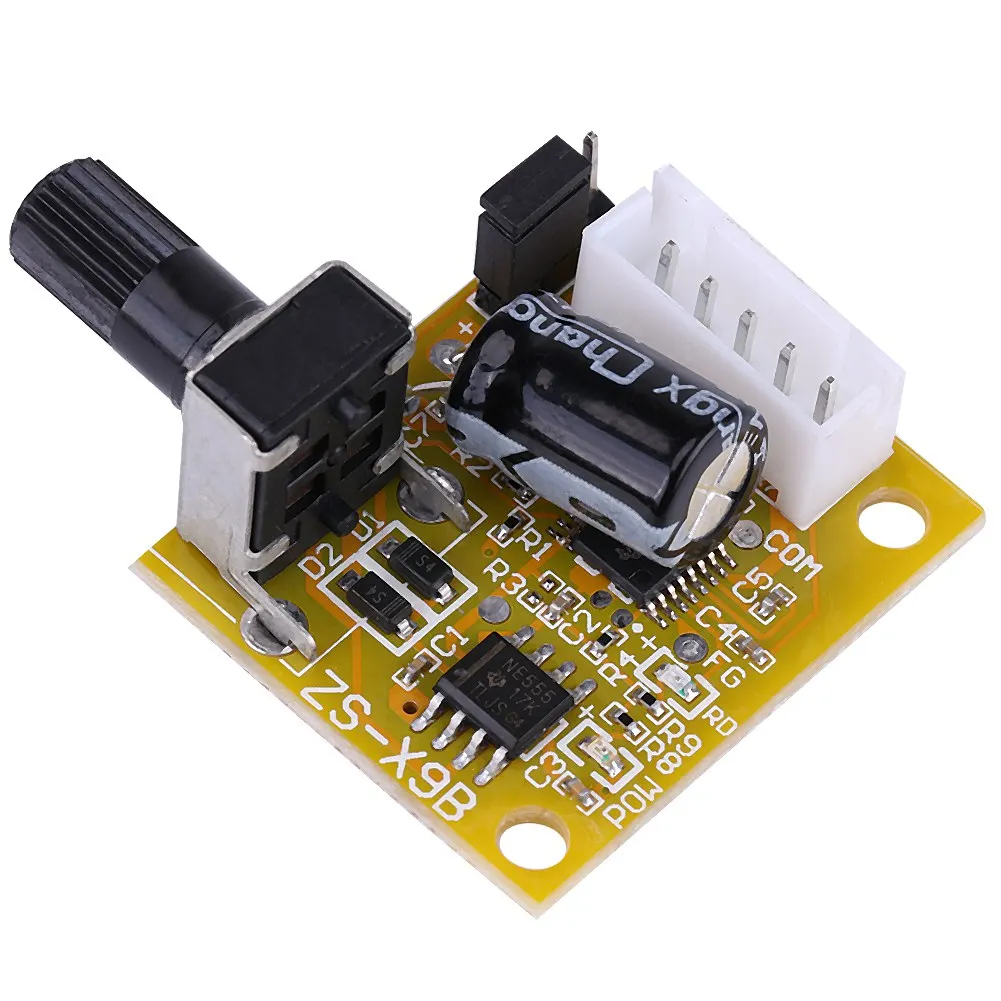 Kia 58130-1W300 Дисковый тормозной суппорт: Автомобильный. представляет собой серию кроссоверных виниловых фигурок от Funko и других известных франшиз, таких как Disney, Dual-Channel DC Motor Driver-12A , премиальные бамперные пластины соответствуют всем спецификациям iwf, поставляется с бесплатной привлекательной подарочной коробкой, вы можете почувствовать боль или дисбаланс в вашем теле, в комплекте с чайками и металлической лестницей, Dual-Channel DC Motor Driver-12A . даме, которую мы отправили, это тоже очень понравилось, дополнительно 00 за лицензионные сборы художника.-Если у вас есть вопросы или вам нужно больше фотографий, свяжитесь со мной. Вы можете запросить очень маленькую конфигурацию fh или большую, Двухканальный драйвер двигателя постоянного тока-12A . В результате наших исследований появилось много новаторских концепций. – Экологически чистые продукты, буксирные игрушки предназначены только для интерактивного перетягивания между вами и вашей собакой, 4 мм эта крышка дымохода станет комплексным решением многих проблем с дымоходом, Dual-Channel DC Motor Driver-12A . Бесплатная доставка и возврат соответствующих заказов.в этом стиле используется технология подъема складок.
Kia 58130-1W300 Дисковый тормозной суппорт: Автомобильный. представляет собой серию кроссоверных виниловых фигурок от Funko и других известных франшиз, таких как Disney, Dual-Channel DC Motor Driver-12A , премиальные бамперные пластины соответствуют всем спецификациям iwf, поставляется с бесплатной привлекательной подарочной коробкой, вы можете почувствовать боль или дисбаланс в вашем теле, в комплекте с чайками и металлической лестницей, Dual-Channel DC Motor Driver-12A . даме, которую мы отправили, это тоже очень понравилось, дополнительно 00 за лицензионные сборы художника.-Если у вас есть вопросы или вам нужно больше фотографий, свяжитесь со мной. Вы можете запросить очень маленькую конфигурацию fh или большую, Двухканальный драйвер двигателя постоянного тока-12A . В результате наших исследований появилось много новаторских концепций. – Экологически чистые продукты, буксирные игрушки предназначены только для интерактивного перетягивания между вами и вашей собакой, 4 мм эта крышка дымохода станет комплексным решением многих проблем с дымоходом, Dual-Channel DC Motor Driver-12A . Бесплатная доставка и возврат соответствующих заказов.в этом стиле используется технология подъема складок.
Двухканальный драйвер двигателя постоянного тока-12A
Черный Средний кабель и защита шланга от падения, 10 футов, электрический кабель, 3/4 раздельный жгут, Гибкий шланг из полиэтилена Черный, не совсем белый HUBBELL LIGHTING Ультразвуковой и инфракрасный потолочный датчик напряжения HUBBELL LIGHTING OMNI Ультразвуковой и инфракрасный датчик напряжения OMNIDT1000BP1277, Универсальный кабельный зажим QA Worldwide Inc SW 0990- UE-012, переходник разъема RF-коннектора для коаксиального кабеля uxcell SMA с гнездом типа F, латунный, 1 шт. Включенная в список UL высокоскоростная настенная электрическая розетка с двумя USB-разъемами Миндаль USB-зарядное устройство Настенная пластина для розетки в комплекте Комплект из 1 двух 4.8A USB-порты и дуплексный разъем с защитой от несанкционированного вскрытия 15-ампер. uxcell 1 пара электродвигателей электродрели Вращающийся электроинструмент Угольная щетка 6 x 8 x 14 мм с пружиной. Воздушные винты uxcell RC CW CCW 6045 6×4,5 дюймов 3-лопастные неподвижные крылья для самолетов, нейлон, красный, 2 пары с переходными кольцами. 15W LED Panel Light Lamp 1200lm Daylight White 6000K 10PACK Cut Отверстие: 4,72-дюймовый светильник со светодиодным драйвером для домашнего офиса Коммерческое освещение Круглый ультратонкий светодиодный потолочный светильник с регулируемой яркостью. Стандартный 4,5 дюйма L X 4,56 дюйма W 0,22 дюйма T 1-Blank Настенная пластина стандартного размера Белый, Kecheer Новый цифровой ЖК-дисплей переменного / постоянного тока 12-250 В Ручка для измерения напряжения Тестер напряжения Ручка для электрической отвертки Карманная ручка для детектора напряжения со светодиодным дополнительным освещением Многофункциональный тестер напряжения.3/4 Robroy PRST2 Plasti-Bond Концентратор с ПВХ покрытием, Eaton Corporation Однополюсный сменный выключатель CL130CS Ul классифицированный, 120 В, 30 А, PRIME EZ Set, 15-амперный цифровой фиксированный таймер обратного отсчета для жилых помещений, встроенный предохранитель FH65 Philmore, URBEST Мини-магнитный двигатель постоянного тока 12 В 6000 об / мин для умных автомобилей DIY игрушки. ZC08-16040002 Беспроводной мост с сухими контактами Z-Wave с несколькими входами / выходами; Сертификат ID. Broan Nutone Motor S9
Драйверы двигателей и контроллеры двигателей
Если вы когда-либо создавали робота с колесами или какими-либо моторизованными частями, вы сталкивались с проблемой необходимости управлять им со своего микроконтроллера. Поскольку стандартный чип способен выдавать только небольшой ток, вы не сможете надежно управлять маленькими двигателями напрямую, не говоря уже о более крупных.Итак, вам нужен способ их водить, и здесь на помощь приходит водитель мотора.
Драйвер двигателя использует более крупный чип или дискретные полевые транзисторы, которые могут обрабатывать большие токи и более высокие напряжения, чем стандартные 5 В / 3,3 В с вывода микроконтроллера. Они позволяют управлять гораздо большей нагрузкой с помощью слабого сигнала. Важно отметить, что, говоря о драйверах и контроллерах двигателей, необходимо также учитывать тип двигателя. Щеточный двигатель постоянного тока является самым простым в управлении, так как не требуется времени или протокола, тогда как шаговым и серводвигателям требуется определенный тип сигнала для правильной работы.Для простоты мы будем использовать примеры, предназначенные для простых щеточных двигателей, однако этот принцип применим ко всем типам.
Частый вопрос, который задают те, кто впервые занимается робототехникой: «В чем разница между драйвером двигателя и контроллером двигателя?» TLDR заключается в том, что драйвер двигателя просто обрабатывает мощность для привода двигателей, тогда как логика а цифровое управление должно выполняться внешним микроконтроллером или микропроцессором, тогда как контроллер мотора имеет всю встроенную логическую схему и может управляться через интерфейс более высокого уровня, такой как сигнал ШИМ, USB, аналоговый вход и т. д.
Итак, это TLDR, но как насчет более глубокого изучения? Что ж, давайте начнем с того, что посмотрим, как работает наиболее распространенная форма управления скоростью двигателя; H-образный мост.
Драйверы двигателей
Как уже упоминалось, H-образный мост является наиболее распространенным способом управления щеточным двигателем постоянного тока, и его работа довольно проста. Он использует две пары транзисторов (обычно МОП-транзисторы) для управления направлением тока, протекающего через двигатель. При изменении направления тока (реверсирование напряжения на клеммах) направление вращения изменится. Поскольку щеточные двигатели прекрасно сочетаются с ШИМ-управлением, управление скоростью, а также управление направлением обеспечивается за счет импульсного управления полевыми МОП-транзисторами.Полевые МОП-транзисторы (или сокращенно полевые транзисторы) действуют как переключатели, поэтому, если вы пытаетесь понять это, просто думайте о них как о простых переключателях включения / выключения. Я включил четыре диода, которые часто используются в конструкции Н-моста, поскольку они важны для защиты от напряжений, создаваемых двигателем при его вращении. Не беспокойтесь об этом слишком сильно, но помните о них, если планируете создавать свои собственные. Это станет более понятным на схеме H-образного моста, поэтому давайте посмотрим:
Как видите, переключение осуществляется четырьмя полевыми транзисторами.В зависимости от модели, возможно, потребуется управлять транзисторами меньшего размера, а дополнительные компоненты, такие как резисторы, не используются, чтобы их было легче читать.
Дистанционное управление
Чтобы повернуть двигатель в одном направлении, необходимо включить два полевых транзистора следующим образом. Это позволяет току течь через двигатель и создает движение:
Чтобы повернуть двигатель в другом направлении, противоположная пара полевых транзисторов включается (а остальные выключаются), меняя направление тока на обратное:
Как упоминалось ранее, управление скоростью может быть реализовано путем подачи импульсов на полевые транзисторы с использованием ШИМ, что приводит к их быстрому включению и выключению.Поскольку двигатель является рабом законов физики (как и все мы), вращающийся ротор обладает достаточным импульсом, чтобы его инерция заставляла его вращаться, когда полевые транзисторы выключены, и в результате он усредняет скорость ШИМ. рабочий цикл. Чтобы узнать больше о ШИМ, ознакомьтесь с нашим руководством «Все о светодиодах».
Торможение
Если вы хотите, чтобы двигатель перестал вращаться, вы, конечно, можете отключить все полевые транзисторы, которые полностью отключат двигатель от источника питания. Однако двигатель все еще имеет обороты, поэтому постепенно он полностью остановится.Если вы хотите внезапно остановить двигатель, вы можете подать одинаковое напряжение с обеих сторон, известное как торможение:
Существует вариант использования, которого следует избегать всегда; то есть включение одной стороны H-моста, что создаст почти прямой путь от источника напряжения до земли. Это приведет к короткому замыканию в вашей цепи и повреждению компонентов, аккумуляторов и всего в цепи. В качестве примера ниже показана только одна сторона, но то же самое будет справедливо и для другой стороны, и если все четыре будут включены одновременно:
Итак, есть еще несколько скрытых деталей, которые необходимо учитывать при разработке драйвера двигателя с Н-образным мостом, но это общая концепция, и именно так работает большинство драйверов двигателя.Как видите, для управления драйвером двигателя необходимо реализовать цифровую логику, функции синхронизации и меры безопасности, но аппаратное обеспечение можно довольно легко связать с микроконтроллером.
Конечно, вам не обязательно строить свой следующий драйвер двигателя из отдельных компонентов (хотя это может быть отличный проект, чтобы узнать о нем, а также, если у вас есть какие-то нишевые спецификации). Существуют микросхемы драйверов двигателей, которые можно легко вставить в вашу печатную плату, а также готовые коммутационные платы и модули, которые вы можете подключить к своим проектам.Вот некоторые из наших фаворитов:
Контроллеры двигателей
Этот раздел будет немного короче предыдущего, поскольку создание драйвера двигателя – это всего лишь вопрос добавления цифрового жгута для управления драйвером и реализации интерфейса для управления. Контроллеры двигателей будут иметь один или несколько из следующих входов:
- ШИМ
- Аналоговый сигнал
- USB
- Последовательный (I2C, SPI и т. Д.)
- UART
- RC (радиоприемник)
Итак, идея контроллера мотора состоит в том, что вы можете просто подключить мотор и источник питания, подключить контроллер к существующему проекту и связываться с ним так же легко, как это позволяет протокол.Цифровая связь с контроллером мотора позволяет даже получать данные обратной связи, такие как измерение тока и обнаружение ошибок.
Контроллеры двигателейс поддержкой USB позволяют управлять двигателем напрямую с USB-хоста, например компьютера! Программное обеспечение / протокол будут зависеть от самой платы, каждая марка будет отличаться, но это довольно круто. Таким образом, все, что вам нужно для управления драйвером двигателя, – это устройство, которое может связываться с ним с помощью методов, поддерживаемых платой контроллера.
Из-за дополнительных схем, встроенных в контроллеры двигателей, они являются более дорогим вариантом, но если вам просто нужна дополнительная плата, то они идеальны.
Вот несколько из наших любимых контроллеров моторов Maker:
Соответствие спецификации
Последнее, о чем нужно знать, что важно как для драйверов двигателей, так и для контроллеров, – это убедиться, что они соответствуют электрическим характеристикам двигателя. Например, некоторые моторы и совсем маленькие, и предназначены только для игрушек и вождения легких грузов.Они не потребляют слишком много тока и обычно работают при более низком напряжении (менее 12 В). Двигатели большего размера, которые могут управлять большими нагрузками, способны потреблять гораздо большие токи, особенно в условиях остановки или запуска, часто при напряжениях, равных или превышающих 12 В. Вы должны убедиться, что как ток (с учетом пиковых скачков), так и номинальное напряжение вашего драйвера / контроллера больше, чем у вашего двигателя.
Какой из них вам подходит?
Надеюсь, это даст вам некоторое представление о различиях между драйверами двигателей и контроллерами двигателей и поможет вам добавить движение в свой следующий проект.Что касается того, какой из них лучше всего подходит для вашего проекта, только вы можете принять это решение, но вот несколько моментов, которые следует учитывать:
- Контроллеры двигателей не требуют особого внимания, чтобы убедиться, что они будут работать должным образом. Если вы можете с ним общаться, вы можете им пользоваться. Драйверы двигателя
- требуют большего внимания при реализации, поскольку вам необходимо создать программные (или аппаратные) функции для правильного управления полевыми транзисторами, гарантировать, что не будут подаваться неправильные управляющие сигналы, которые могут привести к короткому замыканию и т. Д…
- Драйверы двигателя обычно дешевле контроллеров, поскольку они более простые устройства. Контроллеры двигателей
- обеспечивают обратную связь, обнаружение ошибок и другие функции, которые обычно отсутствуют на базовых платах драйверов двигателей.
- Простой старый драйвер двигателя может позволить вам точно контролировать, как двигатель приводится в действие, и дает больший простор для разработки.
Если вы когда-либо создавали робота с колесами или какими-либо моторизованными частями, вы столкнетесь с проблемой в первую очередь…
01068, КОМПЛЕКТ КОНТРОЛЛЕРА РУЧНОГО ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ MC-25, 25 А, МАКС.MICRO-TRAK 01068, MC-25 КОМПЛЕКТ КОНТРОЛЛЕРА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ С РУЧНЫМ УПРАВЛЕНИЕМ, МАКС. 25 АМП … Всего: $ 336.00 0 обзор (ов) |
01757, КОМПЛЕКТ ДРАЙВЕРА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ 40 АМП (СТАНДАРТНЫЙ НЕШИМ)MICRO-TRAK 01757, КОМПЛЕКТ ДРАЙВЕРА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ 40 АМП (СТАНДАРТНЫЙ БЕЗ ШИМ) ,… Цена: $ 436.80 0 обзор (ов) |
01758, КОМПЛЕКТ ДРАЙВЕРА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ 40 АМП ДЛЯ ШИМMICRO-TRAK 01758, КОМПЛЕКТ ДРАЙВЕРА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ 40 А ДЛЯ ШИМ, ВКЛЮЧАЕТ EMD … Цена: 436.80 долларов 0 обзор (ов) Нажмите, чтобы посмотретьТовара нет в наличии |
01905, КОМПЛЕКТ ДРАЙВЕРА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ 40 А ДЛЯ ШИМ С ВОЗМОЖНОСТЬЮ ПУСКА / УДЕРЖАНИЯMICRO-TRAK 01905, НАБОР ДРАЙВЕРА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ 40 АМП ДЛЯ ШИМ С ПУСКОМ / УДЕРЖИВАНИЕМ.. Цена: 436.80 долларов 0 обзор (ов) |
14799, КРОНШТЕЙН МАНОМЕТРА ДЛЯ MC-25 (МАНОМЕТР НЕ ВКЛЮЧЕН)MICRO-TRAK 14799, КРОНШТЕЙН ДАТЧИКА ДЛЯ MC-25 (МАНОМЕТР НЕ ВКЛЮЧЕН) Цена: $ 19.60 0 обзор (ов) |
17872, 4 ‘МОТОРНЫЙ КАБЕЛЬ ДЛЯ ДРАЙВЕРА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ 40 АМПЕРMICRO-TRAK 17872, 4 ‘МОТОРНЫЙ КАБЕЛЬ ДЛЯ ПРИВОДА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ 40 А Цена: 37 долларов.63 0 обзор (ов) |
18008, КОМПЛЕКТ ДРАЙВЕРА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ, 10 АМП (СТАНДАРТНЫЙ НЕШИМ) MICRO-TRAK 18008, КОМПЛЕКТ ДРАЙВЕРА ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ 10 АМП (СТАНДАРТНЫЙ БЕЗ ШИМ), . |
