
Драйверы и контроллеры шаговых двигателей
Драйверы и контроллеры шаговых двигателей- Станки ЧПУ
- Лазерные станки с ЧПУ
- Токарные станки
- Круглофрезерный станок
- Лазерно-гравировальные станки
- Станок плазменной резки
- Многошпиндельные станки
- Станок для обработки пенопласта
- 3D Принтеры
- Покрасочный станок
- Комплектующие к ЧПУ
- Комплектующие для лазерных станков
- Готовые модули
- Режущий инструмент
- Фрезы ARDEN для ручных и ЧПУ фрезеров
- Фрезы пазовые прямые
- Фрезы для выравнивания поверхности
- Фрезы V-образные
- Фрезы кромочные прямые
- Фрезы для врезания петель и замков
- Фрезы пазовые галтельные
- Фрезы радиусные полукруглые
- Фрезы “Ласточкин хвост”
- Фрезы пазовые
- Фрезы четвертные
- Фрезы профильные
- Фреза “Гусёк” (псевдофилёнка), 222 серия
- Фрезы “Гусёк” 210 серия
- Фрезы “Тройной внешний радиус”, 323 серия
- Фрезы “Декоративный гусёк” 212 серия
- Фрезы “Классический узор”, 211 серия
- Фрезы “Тройной внутренний радиус”, 324 серия
- Фрезы “Шар” 208 серия
- Фрезы Бычий нос “Катушка”, 330 серия
- Фрезы внешнее и внутреннее скругление 2 в 1
- Фрезы для скругления удлиненные
- Фрезы мультипрофильные (Карниз), 351 серия
- Фрезы овальное скругление (Жалюзи)
- Фрезы превсофиленка “Волна-1”
- Фрезы профильные “Ручка” 502 серии
- Фрезы профильные “Углубленный шар”, 329 серия
- Фрезы профильные “Французская классика”, 352 серия
- Фрезы профильные для плинтусов, 403 серия
- Фрезы фигурные “Классический гусёк”, 311 серия
- Фрезы филёночные, 416 серия
- Фрезы для сращивания и мебельной обвязки
- Комплектующие к фрезам ARDEN
- Набор радиальных и фасочных фрез
- Комплектующие для плазменной резки
- Пневматическое оборудование
- Дисковые пилы
- Оборудование для покраски
cnc-tehnologi.ru
FAQ • Что такое драйвер шагового двигателя?
Драйвер шагового двигателя – электронное устройство, которое заставляет шаговый двигатель “шагать” по сигналам управления. Стандартом де-факто в области управления ШД являются сигналы STEP/DIR/ENABLE. STEP это сигнал шага, DIR это сигнал направления вращения, ENABLE это сигнал включения драйвера.
Более научное определение – драйвер шагового двигателя это электронное силовое устройство, которое на основании цифровых сигналов управления управляет сильноточными/высоковольтными обмотками шагового двигателя и позволяет шаговому двигателю делать шаги (вращаться).
Управлять ШД намного сложнее чем обычным коллекторным двигателем — нужно в определенной последовательности переключать напряжения в обмотках с одновременным контролем тока. Поэтому для управления ШД разработаны специальные устройства — драйверы ШД. Драйвер ШД позволяет управлять вращением ротора ШД в соответствии с сигналами управления и электронным образом делить физический шаг ШД на более мелкие дискреты.
К драйверу ШД подключается источник питания, сам ШД (его обмотки) и сигналы управления. Стандартом по сигналам управления является управление сигналами STEP/DIR или CW/CCW и сигнал ENABLE.
Протокол STEP/DIR:
Сигнал STEP — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т.д.). Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал DIR — Потенциальный сигнал, сигнал направления. Логическая единица — ШД вращается по часовой стрелке, ноль — ШД вращается против часовой стрелки, или наоборот. Инвертировать сигнал DIR обычно можно либо из программы управления или поменять местами подключение фаз ШД в разъеме подключения в драйвере.
Протокол CW/CCW:
Сигнал CW — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т. д.) по часовой стрелке. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал CW — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т. д.) против часовой стрелки. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал ENABLE — Потенциальный сигнал, сигнал включения/выключения драйвера. Обычно логика работы такая: логическая единица (подано 5В на вход) — драйвер ШД выключен и обмотки ШД обесточены, ноль (ничего не подано или 0В на вход) — драйвер ШД включен и обмотки ШД запитаны.
Драйверы ШД могут иметь дополнительные функции:
• Контроль перегрузок по току.
• Контроль превышения напряжения питания, защита от эффекта обратной ЭДС от ШД. При замедлении вращения, ШД вырабатывает напряжение, которое складывается с напряжением питания и кратковременно увеличивает его. При более быстром замедлении, напряжение обратной ЭДС больше и больше скачок напряжения питания. Этот скачок напряжения питания может привести к выходу из строя драйвера, поэтому драйвер имеет защиту от скачков питающего напряжения. При превышении порогового значения напряжения питания драйвер отключается.
• Контроль переполюсовки при подключении сигналов управления и питающих напряжений.
• Режим автоматического снижения тока обмотки при простое (отсутствии сигнала STEP) для снижения нагрева ШД и потребляемого тока (режим AUTO-SLEEP).
• Автоматический компенсатор среднечастотного резонанса ШД. Резонанс обычно проявляется в диапазоне 6-12 об/сек, ШД начинает гудеть и ротор останавливается. Начало и сила резонанса сильно зависит от параметров ШД и его механической нагрузки. Автоматический компенсатор среднечастотного резонанса позволяет полностью исключить резонирование ШД и сделать его вращение равномерным и устойчивым во всем диапазоне частот.
• Схему изменения формы фазовых токов с увеличением частоты (морфинг, переход из режима микрошага в режим шага при увеличении частоты). ШД способен отдать заявленный в ТХ момент только в режиме полного шага, поэтому в обычном драйвере ШД без морфинга при использовании микрошага ШД работает на 70% от максимальной мощности. Драйвер ШД с морфингом позволяет получить от ШД максимальную отдачу по моменту во всем диапазоне частот.
• Встроенный генератор частоты STEP – удобная функция для пробного запуска драйвера без подключения к ПК или другому внешнему генератору частоты STEP. Также генератор будет полезен для построения простых систем перемещения без применения ПК.
purelogic.ru
Драйверы и контроллеры шагового двигателя
Для управления приводами требуется специальный драйвер шагового двигателя
Драйвер представляет собой силовую часть со встроенным простейшим интерфейсом, основанным на комбинации ШАГ–НАПРАВЛЕНИЕ.
Драйвер шагового двигателя еще и усилитель мощности, который преобразует импульсы, получаемые от источника электрического тока, в перемещение вала. При этом каждый импульс вызывает перемещение вала на 1 шаг (или на 1 микрошаг).
Драйвер шагового двигателя снабжён специальной схемой, которая служит для выполнения трёх основных задач:
- Включать и выключать ток в обмотках, а также менять его направление. При выполнении этой задачи системы управления электроприводом работают без сбоев.
- Поддерживать заданное значение тока.
- Обеспечивать как можно более быстрое нарастание и спад тока для достижения требуемых скоростных характеристик. Скоростные характеристики в свою очередь качественным образом влияют на управление шаговым двигателем.
Драйверы подразделяются на несколько типов, каждый из которых определяет мощность вала двигателя.
Следует отметить, что современные технологии, по которым изготавливается привод шагового двигателя, постоянно совершенствуются. Смысл совершенствования в том, чтобы обеспечить получение наибольшего момента на валу при минимальных габаритах двигателя, широких скоростных возможностях, высокого КПД и улучшенной точности. Важным звеном этой технологии является применение микрошагового режима.
Кроме того, одной из основных деталей является контроллер управления шаговым двигателем. Как правило, контроллеры для шагового двигателя изготавливаются на базе промышленных микроконтроллеров и могут быть как программными, так и аппаратными. Программные контроллеры для шагового двигателя применяются тогда, когда круг решаемых ими задач небольшой. Цена такого программного контроллера намного ниже аппаратного.
Контроллеры для шагового двигателя могут предназначаться как для униполярных двигателей, так и для двигателей других типов. При этом средний ток обмотки может достигать 2,5 А.
Контроллер шагового двигателя представляет собой комплект из силовой части (драйвер) и устройство, расширяющее возможности управления двигателем (интеллектуальная часть).
Данный компонент шагового двигателя обладает рядом достоинств. Прежде всего, контроллер управления шаговым двигателем имеет возможность передавать сигналы ШАГ–НАПРАВЛЕНИЕ.
Преимущества использования контроллеров для шагового двигателя:
- Возможность подключения к компьютеру. В зависимости от модели и конструкции контроллер управления шаговым двигателем подключается к компьютеру и регулируется с его помощью.
- Многократное перепрограммирование. В настоящее время достаточно купить только один контроллер шагового двигателя. При этом при переориентации производства или расширении перечня задач его можно перепрограммировать для выполнения новых функций.
- Широкий модельный ряд контроллеров как отечественных, так и зарубежных производителей позволяет купить контроллер шагового двигателя с расширенными функциями. Контроллеры с расширенными функциями имеют в своем составе программируемый логический контроллер (привод работает в автономном режиме по записанной в него программе, это позволяет получить готовое устройство для выполнения определённого технологического процесса на основе одного только контроллера шагового двигателя).
Устройство управления электроприводом, оснащенное контроллером, решает следующие задачи:
- Достижение высокой точности. Это связано с конструкцией, благодаря которой устройства управления шаговыми двигателями делают до 20000 шагов за оборот за счет микрошага.
- Работа с программным обеспечением. К ним относятся производственные программы типа Kcam и Mach.
- Работа в различных режимах.
Устройства управления шаговыми двигателями могут функционировать как on-line (то есть подчиняясь командам компьютера) так и off-line (при помощи программы с внешнего устройства, например, флеш-накопителя). Применяется также совмещённый режим (он особенно выгоден при управлении одинаковыми процессами с меняющимися параметрами, управлении контрольными процедурами и опросе параметров, осуществляемом с вашего компьютера)
Блок управления шаговым двигателем.
Вместе с шаговым двигателем работает блок управления шаговым двигателем, который является источником тока для двигателя, осуществляет при необходимости дробление основного углового шага и выполняет коммутацию фаз двигателя. Блок управления обычно поддерживает как ручное, так и автоматическое управление электроприводами.
Современный блок управления электроприводом одновременно является и многофункциональным устройством – с возможностью программирования и синхронизации с другими устройствами, а также с возможностью включить автоматическое управление электроприводами. Существуют решения, при которых блок управления электроприводом программируемый.
В частности, блок управления шаговым двигателем может управляться с помощью компьютера. Подключение происходит через LPT-порт (в том числе и с программами для станков с ЧПУ), через COM-порт – получая специальные команды для определения характера (и алгоритма) движения шагового двигателя, в автономном автоматическом режиме без помощи компьютера или внешнего контроллера (если требуется автоматическое управление электроприводами технологических процессов) или в ручном режиме, когда скорость движения регулируется потенциометром, а направление движения – датчиком реверса.
Учитывая разнообразие шаговых двигателей, их управление зависит от типа самого двигателя. И в соответствии с этим и выбирается блок управления электроприводом.
Биполярный привод шагового двигателя и его управление.
Помимо биполярных двигателей существуют так же униполярные двигатели, обмотки которых имеют средние отводы, служащие для подключения к общему проводу – «земле».
Полный оборот выходного вала двигателя состоит из N-ного количества шагов. Большинство двигателей рассчитаны на шаг 1,8 градуса, таким образом, полный оборот выходного вала будет совершён за 360/1,8 = 200 шагов.
Привод шагового двигателя меняет положение выходного вала на один шаг при подаче на одну из обмоток напряжения питания. Направление протекания тока через обмотку при этом указывает на направление вращения. Для совершения следующего шага необходимо выключить первую обмотку и подать питание на вторую, соблюдая направление тока через обмотку. Итого за 100 полных циклов поочерёдной запитки обмоток мотор сделает ровно один оборот выходного вала.
Поэтому для направления токов требуются устройства управления шаговыми двигателями.
Способы управления электроприводом.
Для управления приводами существует ряд способов, применяемых в зависимости от характера решаемых задач и назначения шагового двигателя в разных областях промышленности.
- Одиночные импульсы. Данный способ управления электроприводом считается самым простым. Он основан на одновременном подключении только одной катушки. Для совершения полного оборота ротора требуется 48 импульсов. При этом каждый перемещает ротор на 7,5 градусов.
- Двойной импульс. В этом случае системы управления шаговыми двигателями основаны на одновременном подключении двух соседних катушек. Для полного оборота ротора требуется также 48 импульсов. Каждый импульс перемещает ротор на 7,5 градусов.
- Комбинированные импульсы. Суть в том, что устройство управления электроприводом чередует первый и второй способы. Двигателю требуется 96 импульсов, чтобы совершить один оборот. Каждый импульс перемещает ротор на 3,75 градуса.
Остались вопросы касательно управления электроприводом? Задайте их сотрудникам компании «Степмотор» и примите решение о приобретении системы управления шаговыми двигателями! Ведь купить контроллер шагового двигателя именно у нас – значит, получить качественный промышленный продукт за разумную цену.
stepmotor.ru
3D печать для самых новеньких. От А до Я. Шаговики, драйверы и немного магнитного поля.
В продолжение предыдущего поста для начинающих пользователей 3D принтеров.В этот раз расскажу о платах управления, распространенных драйверах для шаговых двигателей и немного теории об их работе. К сожалению, у поста есть предел – 65535 символов, и я уже в них не укладываюсь, что бы описать более подробно распространенные платы управления, поэтому они будут в следующем посте, ровно как и разбор прошивок,положительных сторон и недостатков.
Существующие 3D принтеры выросли из больших станков, у которых позаимствовали кинематику и способ управления, который заключается в том, что бы последовательно передавать координаты для перемещения хотенда. Такой своеобразный метод является общепринятым стандартом для управления станков с ЧПУ (числовым программным управлением). Этот язык программирования называется G-code. Язык своеобразный, и изучать его нет необходимости, перевод модели из графического вида в машинный код для перемещения хотенда по осям и подачи пластика осуществляется в программах-слайсерах. Их я опишу чуть позже, пока же хочу вернуться к физической части принтеров и рассмотреть с помощью чего же можно правильно крутить шаговыми двигателями и получать готовую модель.
1. Платы управления и как они управляют.
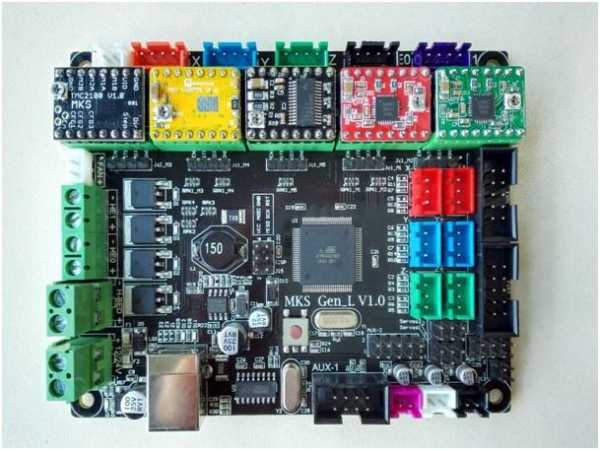
Для упрощенного понимания платы стоит разделить на 2 категории по их разрядности. Бывают 8-битные и 32-битные. Первые 3D принтеры, основанные на REPRAP (Replicating Rapid Prototyper — самовоспроизводящийся механизм для быстрого изготовления прототипов) имели в основе распространенную плату для робототехники, ориентированную на непрофессиональных пользователей – Arduino. Для создания прошивки используется собственная бесплатная среда разработки – Arduino IDE.
 Arduino и Arduino-совместимые платы спроектированы таким образом, чтобы их можно было при необходимости расширять, добавляя в устройство новые компоненты. Как наиболее мощная была взята плата Arduino Mega 2560 с 8-битным процессором.
Arduino и Arduino-совместимые платы спроектированы таким образом, чтобы их можно было при необходимости расширять, добавляя в устройство новые компоненты. Как наиболее мощная была взята плата Arduino Mega 2560 с 8-битным процессором.  Для расширения ее возможностей, то есть управления нагревом горячего стола (Heat bed), хотенда (Hot end), управления вращением шаговых двигателей, учета нулевого положения с помощью концевых выключателей и прочего была разработана плата расширения RAMPS (RepRap Arduino Mega Pololu Shield).
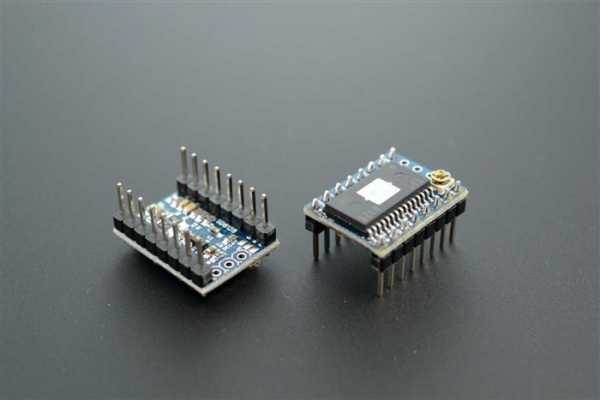
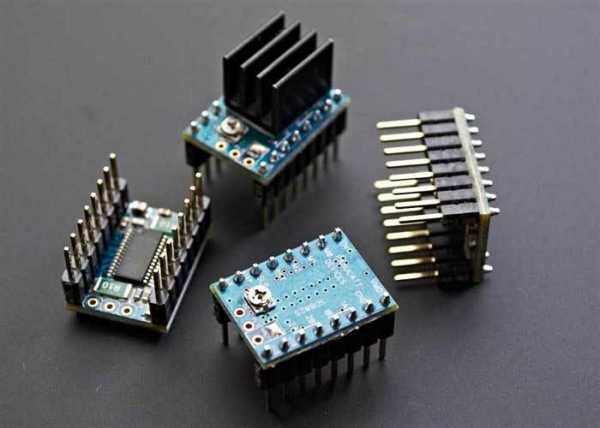
Для расширения ее возможностей, то есть управления нагревом горячего стола (Heat bed), хотенда (Hot end), управления вращением шаговых двигателей, учета нулевого положения с помощью концевых выключателей и прочего была разработана плата расширения RAMPS (RepRap Arduino Mega Pololu Shield). Так же, для управления шаговыми двигателями были разработаны драйвера, совместимые с этой платой (Pololu драйвера).
Так же, для управления шаговыми двигателями были разработаны драйвера, совместимые с этой платой (Pololu драйвера).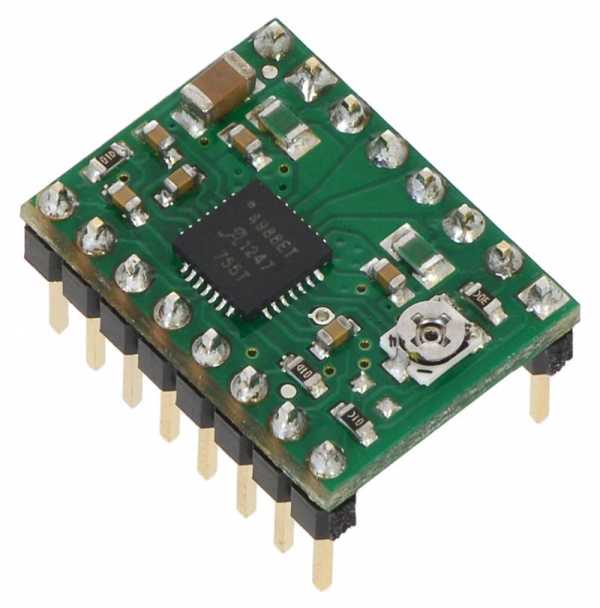 Которые вставляются в гнезда платы. То есть для каждого шагового двигателя, подключаемого к связке Arduino+RAMPS необходим драйвер. RAMPS поддерживает подключение до 5 шаговых двигателей.
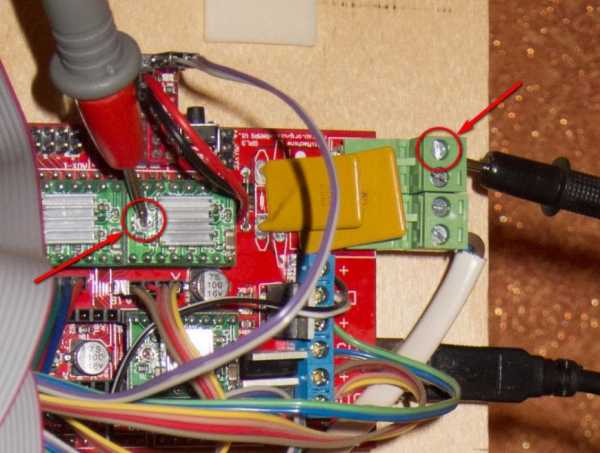
Которые вставляются в гнезда платы. То есть для каждого шагового двигателя, подключаемого к связке Arduino+RAMPS необходим драйвер. RAMPS поддерживает подключение до 5 шаговых двигателей.Для управления шаговым двигателем необходимо настроить напряжение питания двигателя подстроечным резистором. Настройка производится мультиметром в режиме замера постоянного напряжения. Один щуп касается земли ( крайнего контакта на драйвере с надписью GND или же минусового провода от блока питания), другим же коснуться подстроечного резистора.
 Далее нужно посчитать по формуле необходимое напряжение, исходя из тока, на который рассчитан двигатель.
Далее нужно посчитать по формуле необходимое напряжение, исходя из тока, на который рассчитан двигатель.Vref – пин замера напряжения для установки тока по формуле.
Current Limit – ток шагового двигателя.
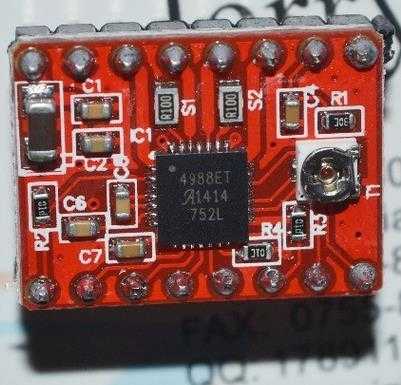
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов. Это два чёрных прямоугольника на плате драйвера. Обычно подписаны R050 или R100.
Vref = Current Limit * 8 * (RS)
RS = 0,100
Vref = Current Limit * 8 * 0,100 = Current Limit / 1,25
RS = 0,050
Vref = Current Limit * 8 * 0,050 = Current Limit / 2,5
Например для 17HS4401: Vref = 1,7 / 2,5 = 0,68В
И вращая резистор добиваемся данной цифры на дисплее мультиметра. Важное дополнение, для того, что бы отрегулировать напряжение необходимо выключить принтер, а для замера – включить.
Формулы для других типов драйверов приведены в этой статье.
Другие платы формата All-in-one (все на одной плате, без таких многослойных конструкций) имеют аналогичные колодки под уже ставшими столь распространенными Pololu-драйвера.

 Так же, для выбора режима работы шагового двигателя между колодками для установки шаговых двигателей сделаны перемычки, замыкая которые мы выбираем тот или иной режим работы.
Так же, для выбора режима работы шагового двигателя между колодками для установки шаговых двигателей сделаны перемычки, замыкая которые мы выбираем тот или иной режим работы.Режимов работы у шагового двигателя с драйверами А4988 всего 5: полный шаг, 1/2 шага, 1/4 шага, 1/8 шага и 1/16.
 Перемычки всего 3: MS0, MS1, MS2. Low – перемычка отсутствует, high – установлена.
Перемычки всего 3: MS0, MS1, MS2. Low – перемычка отсутствует, high – установлена.Получается, что когда нет ни одной перемычки мотор вращается без деления шага на микрошаги, а когда установлены все 3 – на 1/16.
Дробление шага на микрошаги сделано с единственной целью – увеличения точности перемещения. То есть используя дробление 1/4 шага мы не сможем остановиться посередине между 2 и 3 микрошагом. При 1/16 это возможно.
Существует множество драйверов, совместимых с платами, применяемыми в 3D принтерах. Небольшой список:
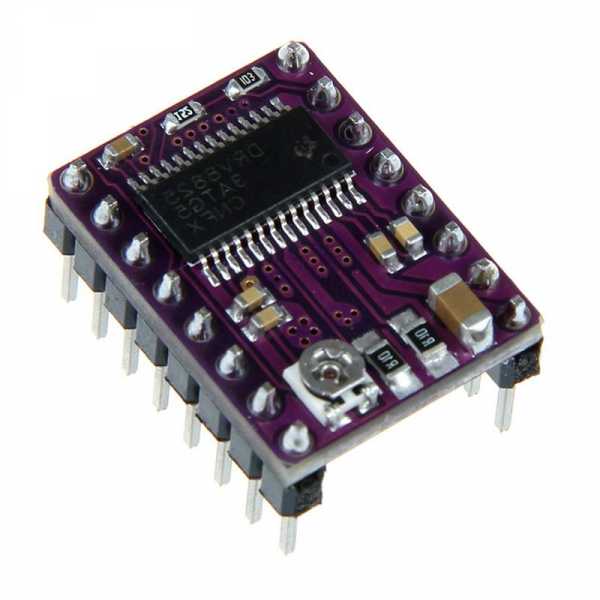
1 ) A4988.
 Могут быть как зеленые, так и красные.
Могут быть как зеленые, так и красные.Максимальный делитель 1/16.
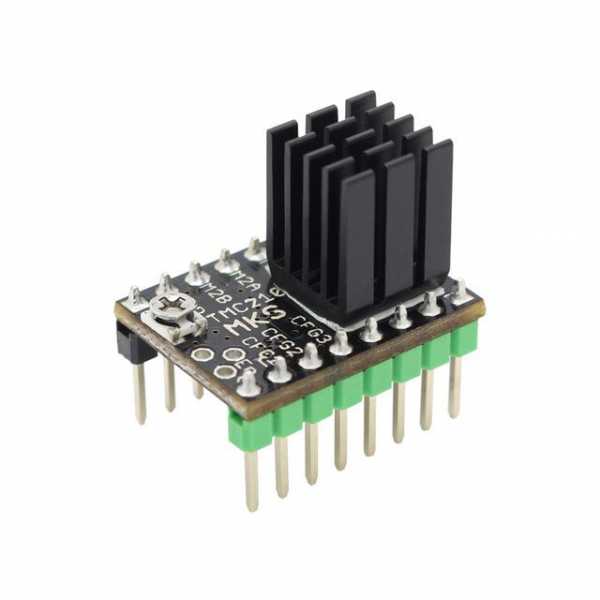
2 ) DRV8825.
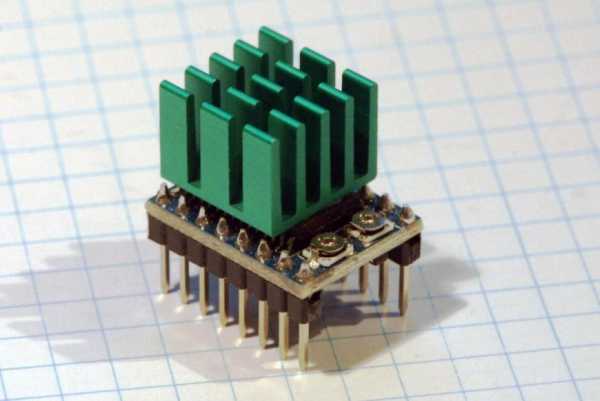
 Могут встречаться как фиолетовые, так и синие. Из-за отсутствия нормального режима удержания (в статичном положении, но с фиксацией ротора, обычно этот режим потребляет меньше энергии, чем вращение) сильно греется. Поэтому рекомендуется устанавливать на чип хороший радиатор.
Могут встречаться как фиолетовые, так и синие. Из-за отсутствия нормального режима удержания (в статичном положении, но с фиксацией ротора, обычно этот режим потребляет меньше энергии, чем вращение) сильно греется. Поэтому рекомендуется устанавливать на чип хороший радиатор.Максимальный делитель 1/32.
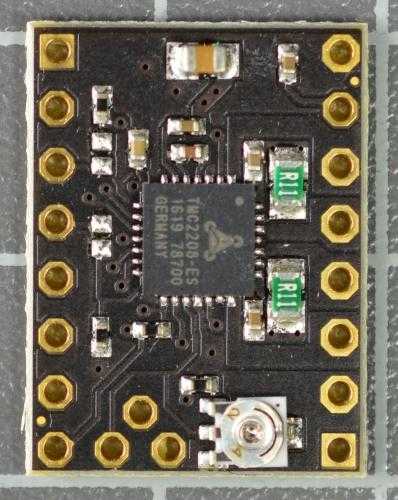
3 ) TMC2100.
 Существует как оригинал, доступный в магазине в Германии и в США, так и множество китайских копий.
Существует как оригинал, доступный в магазине в Германии и в США, так и множество китайских копий.
 Чип тот же, производства Германии, а вот обвязку (резисторы, конденсаторы…) каждый китаец ваяет по-своему, поэтому возникает сложность в подборе напряжения для питания шагового двигателя. Данный драйвер позиционируется как тихий, в котором шум и писк двигателей сведен к минимуму.
Чип тот же, производства Германии, а вот обвязку (резисторы, конденсаторы…) каждый китаец ваяет по-своему, поэтому возникает сложность в подборе напряжения для питания шагового двигателя. Данный драйвер позиционируется как тихий, в котором шум и писк двигателей сведен к минимуму. Сравнение шума от А4988 и TMC2100.
Сравнение шума от А4988 и TMC2100.Но как полагается, чем-то нужно жертвовать взамен. Он очень сильно греется, а при перегреве начинаются пропуски шагов и перемещения по осям могут быть неверными.
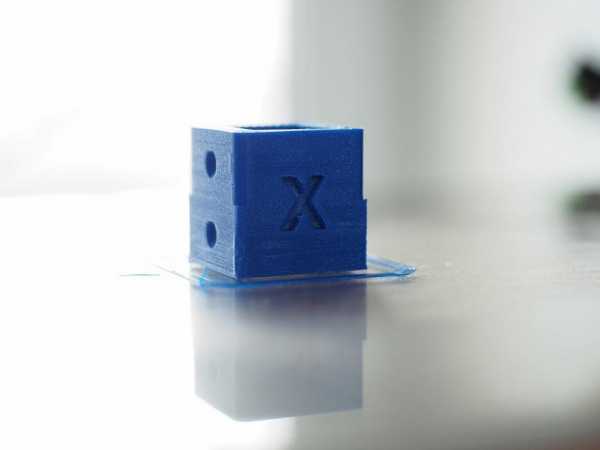 У меня в первый раз кубик стал сопляной гусеницей.
У меня в первый раз кубик стал сопляной гусеницей.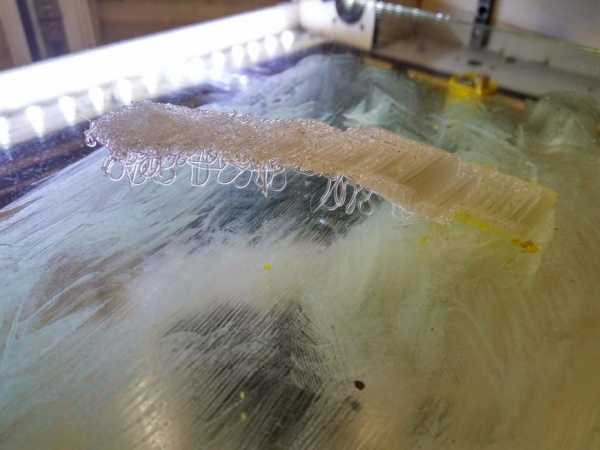 Как следствие – нужно хорошее охлаждение (некоторые китайцы пренебрегают метализацией для отвода тепла, поскольку чип расположен ‘на пузе’ ) и очень точная регулировка напряжения. Есть и небольшие каверзы – вроде бы точно отрегулировал, печатает который месяц мелкие детали без съездов, а ставишь деталь на сутки-двое, и где-то в конце печати получишь микросъезд на 0,5 мм.
Как следствие – нужно хорошее охлаждение (некоторые китайцы пренебрегают метализацией для отвода тепла, поскольку чип расположен ‘на пузе’ ) и очень точная регулировка напряжения. Есть и небольшие каверзы – вроде бы точно отрегулировал, печатает который месяц мелкие детали без съездов, а ставишь деталь на сутки-двое, и где-то в конце печати получишь микросъезд на 0,5 мм.Драйвер имеет собственный чип, который интерполирует делитель 1/16 в 1/256 без нагрузки для процессора, и обеспечивает очень тихую работу.
4 ) LV8729
Чаще всего драйвер исполнения китайской компании Makerbase (MKS).

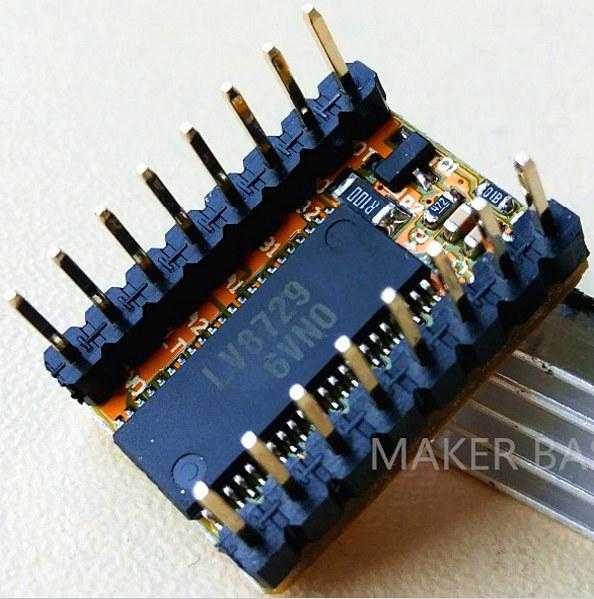 Драйвера характеризуются широкими возможностями регулировки делителя микрошага. От полного до 1/128. Внутреннего делителя, как у ТМС2100 нет.
Драйвера характеризуются широкими возможностями регулировки делителя микрошага. От полного до 1/128. Внутреннего делителя, как у ТМС2100 нет.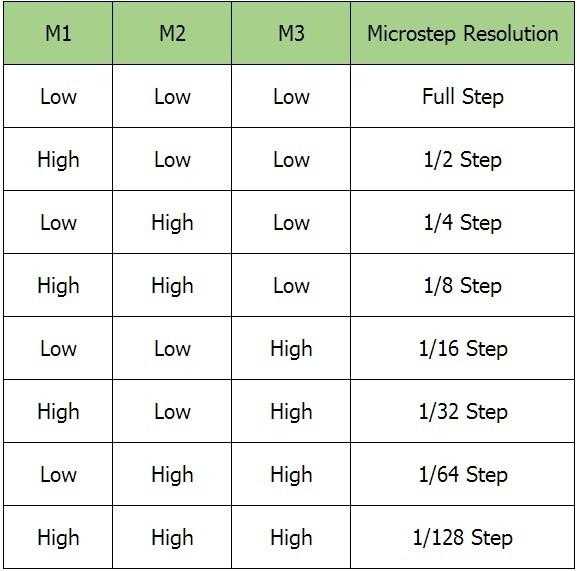 Использовать с 1/64 и 1/128 с 8-битной электроникой (на базе AtMega 2560) не рекомендуется, так как необходимо задействовать очень много ресурсов процессора. Предназначены для установки в 32-разрядные платы.
Использовать с 1/64 и 1/128 с 8-битной электроникой (на базе AtMega 2560) не рекомендуется, так как необходимо задействовать очень много ресурсов процессора. Предназначены для установки в 32-разрядные платы.5 ) SD5984.
 Драйвера производства Panucatt Devices. Продаются только там, китайцы не делают такие. Тоже поддерживают дробление шага от полного до 1/32. Имеется защита от большого тока и перегрева. Как вы заметили на фото, есть 2 ‘лишних’ штырька – драйвера поддерживают регулировку напряжения извне, то есть в прошивке платы. Что очень удобно позволяет контролировать и регулировать напряжение.
Драйвера производства Panucatt Devices. Продаются только там, китайцы не делают такие. Тоже поддерживают дробление шага от полного до 1/32. Имеется защита от большого тока и перегрева. Как вы заметили на фото, есть 2 ‘лишних’ штырька – драйвера поддерживают регулировку напряжения извне, то есть в прошивке платы. Что очень удобно позволяет контролировать и регулировать напряжение.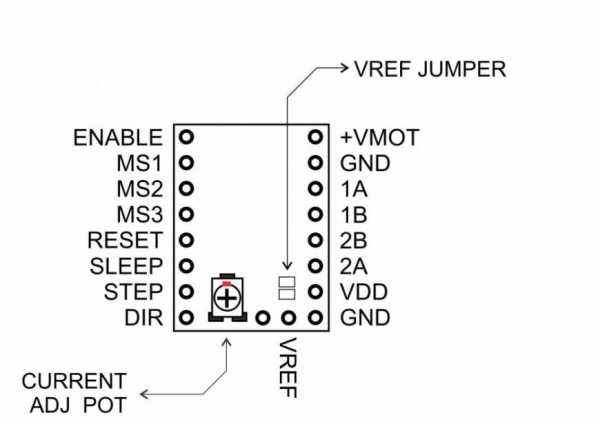 Поставляется в 2 вариантах:
Поставляется в 2 вариантах:1) Стандартная версия. Площадка под пины регулировки напряжения закорочена, и регулировка напряжения возможна как во всех остальных драйверах – руками, в смысле отверткой и мультиметром. Поддерживается всеми платами.
2) Цифровая регулировка. Пины в наличии и регулировка производится программно. Поддерживается только собственными контроллерами: Azteeg X3, X3 PRO и X5 mini V3.
6 ) SD6128Драйвера так же производства Panucatt Devices.
 В отличие от SD6128 имеют дробление шага до 1/256. Так же, имеется защита от перегрева и большого тока. Аналогично, присутствует в 2 версиях: с ручной регулировкой напряжения, и с поддержкой программной регулировки. Программная регулировка доступна только для плат Azteeg X3, X3 PRO и X5 mini V3.
В отличие от SD6128 имеют дробление шага до 1/256. Так же, имеется защита от перегрева и большого тока. Аналогично, присутствует в 2 версиях: с ручной регулировкой напряжения, и с поддержкой программной регулировки. Программная регулировка доступна только для плат Azteeg X3, X3 PRO и X5 mini V3.В основе драйвера лежит чип THB6128. Драйвер работает как в 3,3В (32-разрядные платы), так и 5В (8-разрядные). Установка делителя производится так же, перемычками, в соответствии с таблицей из pdf-описания.
Для установки в 8-битные платы, задействовать делители выше 1/64 не рекомендуется из-за возможной перегрузки процессора.
7 ) SD8825.
 Собственная версия Panucatt Devices, аналогичная привычной DRV8825, с тем лишь отличием, что есть 2 пина для управления напряжением на драйвере. Регулировка доступна лишь на платах собственного производства: Azteeg X3, X3 PRO и X5 mini V3.
Собственная версия Panucatt Devices, аналогичная привычной DRV8825, с тем лишь отличием, что есть 2 пина для управления напряжением на драйвере. Регулировка доступна лишь на платах собственного производства: Azteeg X3, X3 PRO и X5 mini V3.Делитель 1/32.
8 ) TMC2130.
 Свой опыт использования и покупки я уже описывал. Повторюсь, что если есть желание заморочиться с использованием SPI на плате, и попытаться настроить напряжение – пожалуйста. В распространенную прошивку для 8-битных плат Marlin уже добавлена библиотека для данного драйвера и авторегулировки его напряжения (ток прибавляется до тех пор, пока не появится ошибка о перегреве, далее оно снижается пошагово, с шагом в 50мА), но пока толковых упоминаний об установке и настройке Pololu-драйвера не видел. Единственная реализация, заслуживающая внимания – реализация Джозефа Прюши, на новой MK3. В его новой плате EINSY RAMBO данные драйвера уже впаяны в плату, а прошивка поддерживает регулировку напряжения. Одним из преимуществ данного драйвера является контроль момента на роторе двигателя, то есть в момент касания каретки стопора момент на валу ротора резко увеличивается, и плата понимает, что каретка доехала до максимума и дальше пытаться ее двигать нет смысла. Поэтому там отсутствуют концевые выключатели.
Свой опыт использования и покупки я уже описывал. Повторюсь, что если есть желание заморочиться с использованием SPI на плате, и попытаться настроить напряжение – пожалуйста. В распространенную прошивку для 8-битных плат Marlin уже добавлена библиотека для данного драйвера и авторегулировки его напряжения (ток прибавляется до тех пор, пока не появится ошибка о перегреве, далее оно снижается пошагово, с шагом в 50мА), но пока толковых упоминаний об установке и настройке Pololu-драйвера не видел. Единственная реализация, заслуживающая внимания – реализация Джозефа Прюши, на новой MK3. В его новой плате EINSY RAMBO данные драйвера уже впаяны в плату, а прошивка поддерживает регулировку напряжения. Одним из преимуществ данного драйвера является контроль момента на роторе двигателя, то есть в момент касания каретки стопора момент на валу ротора резко увеличивается, и плата понимает, что каретка доехала до максимума и дальше пытаться ее двигать нет смысла. Поэтому там отсутствуют концевые выключатели.Плата, аналогично с TMC2100, имеет внутренний делитель с 1/16 до 1/256. Переключение между делителями производится программно, по SPI-интерфейсу.
 Появилось достаточно много китайских клонов, в которых SPI-интрефейс запаян, и работа полностью аналогична TMC2100. Как утверждает представитель компании Watterott – разницы между TMC2100 и TMC2130 с запаяным SPI никакой.
Появилось достаточно много китайских клонов, в которых SPI-интрефейс запаян, и работа полностью аналогична TMC2100. Как утверждает представитель компании Watterott – разницы между TMC2100 и TMC2130 с запаяным SPI никакой.9 ) TMC2208
 Новая версия драйверов от Trinamic и Watterott. Конфигурация деления микрошага осуществляется через UART-интерфейс, вот такой платой.
Новая версия драйверов от Trinamic и Watterott. Конфигурация деления микрошага осуществляется через UART-интерфейс, вот такой платой.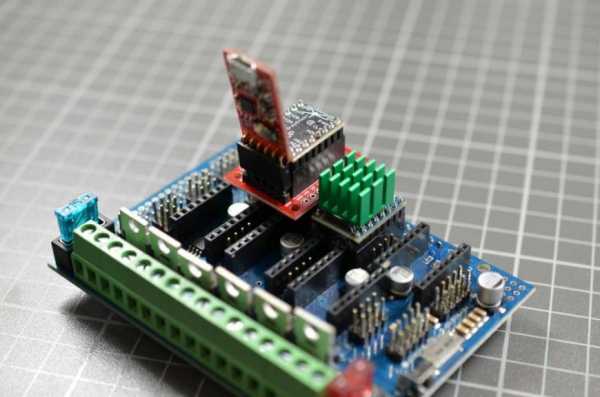 Плата обеспечивает подключение драйвера через данный интерфейс через кабель к USB компьютера. Далее с помощью собственной утилиты производится конфигурация параметров.
Плата обеспечивает подключение драйвера через данный интерфейс через кабель к USB компьютера. Далее с помощью собственной утилиты производится конфигурация параметров.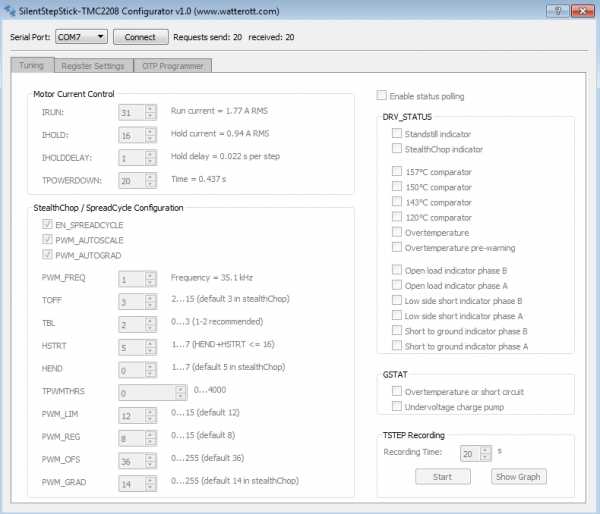 После конфигурирования прошивки плату можно отключить от драйвера.
После конфигурирования прошивки плату можно отключить от драйвера.Уже появились китайские клоны данной платы.
Приобрел себе такой. Могу сделать единственный вывод – китайские клоны намного капризнее и сложнее в настройке напряжения, нежели оригиналы. Были и BigtreeTech TMC2100 и Makerbase TMC2100 и вот эти blkbox TMC2208, и разумеется оригинальные TMC2100. Настроить китайцев, что б вот прямУ чипа такой же делитель с 1/16 до 1/256, как и у всех остальных TMC2100,2130.
10 ) RAPS128
 Сложно сказать, кто кого повторил, если убрать все стереотипы. Немецкие драйвера, на базе THB6128 ( как и у Panucatt Divices SD6128 ,если верить Wiki REPRAP.org и сайту производителя. Судя по описанию на сайте магазина, где они продаются, немцы не гнушаются ставить и LV8729V, как у китайских MKS LV8729.
Сложно сказать, кто кого повторил, если убрать все стереотипы. Немецкие драйвера, на базе THB6128 ( как и у Panucatt Divices SD6128 ,если верить Wiki REPRAP.org и сайту производителя. Судя по описанию на сайте магазина, где они продаются, немцы не гнушаются ставить и LV8729V, как у китайских MKS LV8729.Драйвер имеет делитель от полного шага до 1/128. Для 8-битных плат не рекомендуется ставить делитель выше 1/32.
Как очень заметно, выделяется не 1, а 2 потенциометра. Левый – для настройки напряжения, а правый отвечает за регулировку спада тока. Производитель рекомендует держать положение этого потенциометра где-то посередине, от 1,1 до 3В. В даташите на любые драйвера имеются табличные значения для установки спада тока.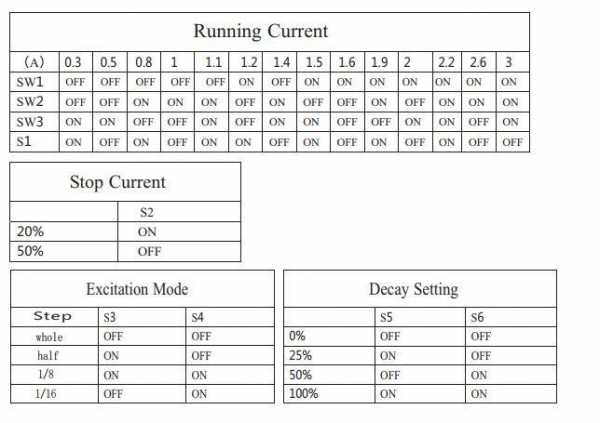 Небольшое лирическое отступление.
Небольшое лирическое отступление.Представлю небольшую выжимку данной статьи, для понимания принципов работы шаговых двигателей и сложностей управления ими.
Шаговый двигатель. Как он работает и зачем ему спад тока?
Шаговый двигатель – это электромеханическое устройство, которое преобразует электрические импульсы в дискретные механические перемещения.
Однако шаговые двигатели обладают множеством полезных свойств, а главное – они дешевы.
Чем же хорош шаговый двигатель?
- угол поворота ротора определяется числом импульсов, которые поданы на двигатель;
- двигатель обеспечивает полный момент в режиме удержания;
- точное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не накапливается от шага к шагу;
- возможность быстрого старта/остановки/реверсирования;
- надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников;
- однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи;
- возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора;
- может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов;
- шаговым двигателям присуще явление резонанса;
- возможна потеря положения из-за отсутствия обратной связи;
- потребление энергии не уменьшается даже без нагрузки;
- затруднена работа на высоких скоростях;
- невысокая удельная мощность;
- относительно сложная схема управления;
Существуют три основных типа шаговых двигателей:
- двигатели с переменным магнитным сопротивлением
- двигатели с постоянными магнитами
- гибридные двигатели
В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга. Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Нас интересуют гибридные двигатели, наиболее часто применяемые в 3D принтерах.
Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении.
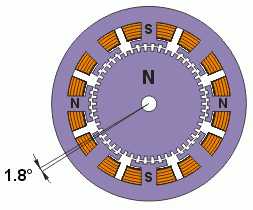 Ротор разделен на две части, между которыми расположен постоянный магнит. Таким образом, зубцы верхней половины ротора являются северными полюсами, а зубцы нижней половины – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3.6 град. двигателей и 8 основных полюсов для 1.8- и 0.9 град. двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.
Ротор разделен на две части, между которыми расположен постоянный магнит. Таким образом, зубцы верхней половины ротора являются северными полюсами, а зубцы нижней половины – южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3.6 град. двигателей и 8 основных полюсов для 1.8- и 0.9 град. двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними.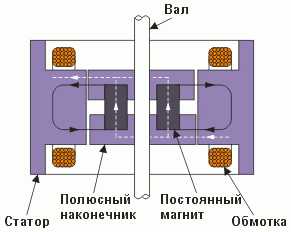 Ротор привычного для 3D принтера двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1.8 град.
Ротор привычного для 3D принтера двигателя имеет 100 полюсов (50 пар), двигатель имеет 2 фазы, поэтому полное количество полюсов – 200, а шаг, соответственно, 1.8 град.Как видно на рисунке, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубъев. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и, как следствие, обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока (на рисунке показана штриховой белой линией), которая и создает момент. Часть цепи лежит в плоскости, перпендикулярной рисунку, поэтому не показана. В этой же плоскости создают магнитный поток катушки статора. В гибридном двигателе этот поток частично замыкается полюсными наконечниками ротора, и постоянный магнит его «видит» слабо. Поэтому в отличие от двигателей постоянного тока, магнит гибридного двигателя невозможно размагнитить ни при какой величине тока обмоток.
Величина зазора между зубцами ротора и статора очень небольшая – типично 0.1 мм. Это требует высокой точности при сборке, поэтому шаговый двигатель не стоит разбирать ради удовлетворения любопытства, иначе на этом его срок службы может закончиться.
Чтобы магнитный поток не замыкался через вал, который проходит внутри магнита, его изготавливают из немагнитных марок стали. Они обычно обладают повышенной хрупкостью, поэтому с валом, особенно малого диаметра, следует обращаться осторожно.
Для получения больших моментов необходимо увеличивать как поле, создаваемое статором, так и поле постоянного магнита. При этом требуется больший диаметр ротора, что ухудшает отношение крутящего момента к моменту инерции. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. Крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.
Гибридные двигатели подразделяются на 2 типа. В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель (на рисунке ниже под буквой а) имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.
Униполярный двигатель (б) также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов. Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности.Так какой лучше?
Если сравнивать между собой биполярный и униполярный двигатели, то первый имеет выше удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Наиболее важным является ограничение по нагреву двигателя вследствие омических потерь в обмотках. Как раз этот факт и демонстрирует одно из преимуществ биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток. Другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра. В то же время в биполярном двигателе всегда работают все обмотки, т.е. их использование оптимально. В таком двигателе сечение отдельных обмоток вдвое больше, а омическое сопротивление – соответственно вдвое меньше. Это позволяет увеличить ток в корень из двух раз при тех же потерях, что дает выигрыш в моменте примерно 40%. Если же повышенного момента не требуется, униполярный двигатель позволяет уменьшить габариты или просто работать с меньшими потерями. На практике все же часто применяют униполярные двигатели, так как они требуют значительно более простых схем управления обмотками.
А как управлять шаговым двигателем?
Существует несколько способов управления шаговым двигателем. Все расписывать не буду, так как они относятся к полношаговым или полушаговым режимам работы. Нас интересует именно микрошаговый режим. При этом способе управления ток в фазах нужно менять небольшими шагами, обеспечивая таким образом дробление половинного шага на еще меньшие микрошаги (Важный ресурс – частота процессора, т.е с какой частотой он может подавать сигнал STEP на перемещение драйверу). Когда одновременно включены две фазы, но их токи не равны, то положение равновесия ротора будет лежать не в середине шага, а в другом месте, определяемом соотношением токов фаз. Меняя соотношение, можно обеспечить некоторое количество микрошагов внутри одного шага. Для реализации микрошагового режима требуются более сложные драйверы, позволяющие задавать ток в обмотках с необходимым соотношением. Полушаговый режим является частным случаем микрошагового режима, но он не требует формирования ступенчатого тока питания катушек, поэтому часто реализуется.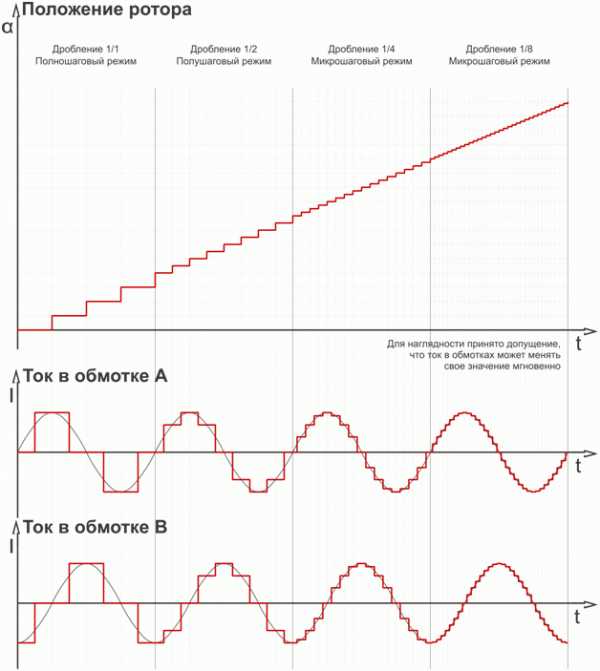 Микрошаговый режим обеспечивается путем получения поля статора, вращающегося более плавно, чем в полно- или полушаговом режимах. В результате обеспечиваются меньшие вибрации и практически бесшумная работа вплоть до нулевой частоты. Меньший угол шага способен обеспечить более точное позиционирование. Существует много различных микрошаговых режимов, с величиной шага от 1/3 полного шага до 1/512. Шаговый двигатель является синхронным электродвигателем. Это значит, что положение равновесия неподвижного ротора совпадает с направлением магнитного поля статора. При повороте поля статора ротор тоже поворачивается, стремясь занять новое положение равновесия.
Чтобы получить нужное направление магнитного поля, необходимо выбрать не только правильное направление токов в катушках, но и правильное соотношение этих токов.
Микрошаговый режим обеспечивается путем получения поля статора, вращающегося более плавно, чем в полно- или полушаговом режимах. В результате обеспечиваются меньшие вибрации и практически бесшумная работа вплоть до нулевой частоты. Меньший угол шага способен обеспечить более точное позиционирование. Существует много различных микрошаговых режимов, с величиной шага от 1/3 полного шага до 1/512. Шаговый двигатель является синхронным электродвигателем. Это значит, что положение равновесия неподвижного ротора совпадает с направлением магнитного поля статора. При повороте поля статора ротор тоже поворачивается, стремясь занять новое положение равновесия.
Чтобы получить нужное направление магнитного поля, необходимо выбрать не только правильное направление токов в катушках, но и правильное соотношение этих токов.Смещение точки равновесия ротора говорит о том, что ротор можно зафиксировать в любой произвольной позиции. Для этого нужно лишь правильно установить отношение токов в фазах. Именно этот факт используется при реализации микрошагового режима.
Результатом использования микрошагового режима является более плавное вращение ротора на низких частотах. Для достижения высоких скоростей в микрошаговом режиме требуется высокая частота повторения микрошагов, которую не всегда может обеспечить управляющий микроконтроллер. Именно из-за этого происходит переход от 8-битной электроники к 32-битной, так как в дельта-принтерах для перемещения вдоль одной оси используется движение сразу 3 двигателей.
При осуществлении каждого шага ротор не сразу останавливается в новом положении равновесия, а осуществляет затухающие колебания вокруг положения равновесия. Время установления зависит от характеристик нагрузки и схемы драйвера. Обычно колебания являются нежелательными. Избавиться от этого явления можно используя микрошаговый режим. Ниже показаны перемещения ротора при работе в полношаговом и микрошаговом режимах.
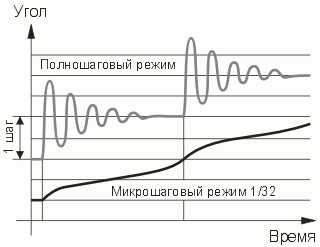 Видно, что в полношаговом режиме наблюдаются выбросы и колебания, в то время как в микрошаговом режиме их нет. Однако и в этом режиме график положения ротора отличается от прямой линии. Эта погрешность объясняется погрешностью геометрии деталей двигателя и может быть уменьшена путем проведения калибровки и последующей компенсации путем корректировки токов фаз.
Видно, что в полношаговом режиме наблюдаются выбросы и колебания, в то время как в микрошаговом режиме их нет. Однако и в этом режиме график положения ротора отличается от прямой линии. Эта погрешность объясняется погрешностью геометрии деталей двигателя и может быть уменьшена путем проведения калибровки и последующей компенсации путем корректировки токов фаз.При вращении ротора у двигателя есть мертвые зоны, которые ограничивают точность позиционирования.
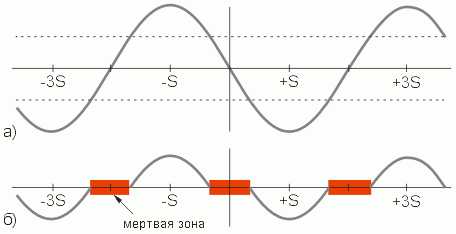 На рисунке показана зависимость зависимость момента от угла поворота ротора.
На рисунке показана зависимость зависимость момента от угла поворота ротора.Наличие мертвых зон является очень важным для микрошагового режима. Если, например, имеются мертвые зоны величиной d, то микрошаг величиной менее d вообще не сдвинет ротор с места.
Когда двигатель работает под нагрузкой, всегда существует некоторый сдвиг между угловым положением ротора и ориентацией магнитного поля статора. Особенно неблагоприятной является ситуация, когда двигатель начинает торможение и момент нагрузки реверсируется. Нужно отметить, что запаздывание или опережение относится только к положению, но не к скорости. В любом случае, если синхронность работы двигателя не потеряна, это запаздывание или опережение не может превышать величины двух полных шагов. Это очень приятный факт.
Каждый раз, когда шаговый двигатель осуществляет шаг, ротор поворачивается на S радиан. При этом минимальный момент имеет в место, когда ротор находится между соседними положениями равновесия.
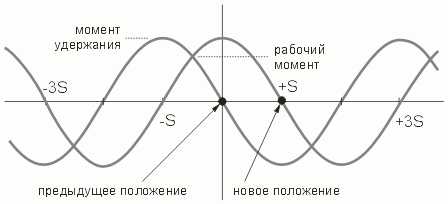 Этот момент называют рабочим моментом, он означает, какой наибольший момент может преодолевать двигатель при вращении с малой скоростью. Если двигатель делает шаг с двумя запитанными обмотками, то рабочий момент равен моменту удержания для одной запитанной обмотки.
Этот момент называют рабочим моментом, он означает, какой наибольший момент может преодолевать двигатель при вращении с малой скоростью. Если двигатель делает шаг с двумя запитанными обмотками, то рабочий момент равен моменту удержания для одной запитанной обмотки.Параметры привода зависят от характеристик нагрузки. Кроме трения, реальная нагрузка обладает инерцией. Инерция препятствует изменению скорости и требует от двигателя больших моментов на разгоне и торможении, ограничивая максимальное ускорение. С другой стороны, увеличение инерционности нагрузки увеличивает стабильность скорости.
При конструировании драйверов шаговых двигателей нужно учитывать, что обмотки двигателя представляют собой индуктивность. Эта индуктивность определяет время нарастания и спада тока. Поэтому если к обмотке приложено напряжение прямоугольной формы, форма тока не будет прямоугольной. При низких скоростях (а) время нарастания и спада тока не способно сильно повлиять на момент, однако на высоких скоростях момент падает. Связано это с тем, что на высоких скоростях ток в обмотках двигателя не успевает достигнуть номинального значения(б).
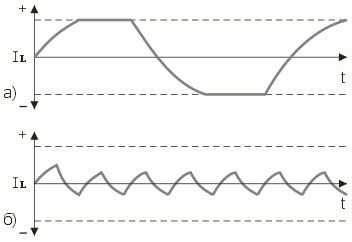 Для того, чтобы момент падал как можно меньше, необходимо обеспечить высокую скорость нарастания тока в обмотках двигателя, что достигается применением специальных схем питания.
Для того, чтобы момент падал как можно меньше, необходимо обеспечить высокую скорость нарастания тока в обмотках двигателя, что достигается применением специальных схем питания.Поведение момента при увеличении частоты коммутации фаз примерно такое: начиная с некоторой частоты среза момент монотонно падает. Обычно для шагового двигателя приводятся две кривые зависимости момента от скорости.
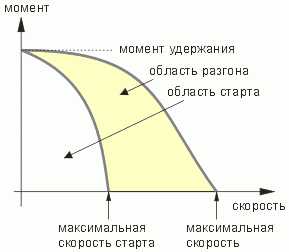 Внутренняя кривая (кривая старта) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен тронуться. Эта кривая пересекает ось скоростей в точке, называемой максимальной частотой старта или частотой приемистости. Она определяет максимальную скорость, на которой ненагруженный двигатель может тронуться.
Внутренняя кривая (кривая старта) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен тронуться. Эта кривая пересекает ось скоростей в точке, называемой максимальной частотой старта или частотой приемистости. Она определяет максимальную скорость, на которой ненагруженный двигатель может тронуться.Внешняя кривая (кривая разгона) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен поддерживать вращение без пропуска шагов. Эта кривая пересекает ось скоростей в точке максимальной частоты разгона. Она показывает максимальную скорость для данного двигателя без нагрузки. Область, которая лежит между кривыми, называется областью разгона.
Для того, чтобы работать на большой скорости из области разгона, необходимо стартовать на низкой скорости из области старта, а затем выполнить разгон. При остановке нужно действовать в обратном порядке: сначала выполнить торможение, и только войдя в область старта можно прекратить подачу управляющих импульсов. В противном случае произойдет потеря синхронности и положение ротора будет утеряно.
Необходимо отметить, что непрерывная работа шагового двигателя на высокой скорости не всегда допустима ввиду нагрева ротора.
При осуществлении разгона или торможения важно правильно выбрать закон изменения скорости и максимальное ускорение. Ускорение должно быть тем меньше, чем выше инерционность нагрузки. Критерий правильного выбора режима разгона – это осуществление разгона до нужной скорости для конкретной нагрузки за минимальное время. Чаще всего применяют разгон и торможение с постоянным ускорением.
Реализация закона, по которому будет производится ускорение или торможение двигателя, обычно производится программно управляющим микроконтроллером, так как именно микроконтроллер обычно является источником тактовой частоты для драйвера шагового двигателя. Для генерации тактовой частоты удобно использовать аппаратный таймер, который имеется в составе того же процессора Arduino – Atmega2560. Когда двигатель вращается с постоянной скоростью, достаточно загрузить в таймер постоянное значение периода повторения шагов (длительность шага). Если же двигатель разгоняется или тормозится, этот период меняется с каждым новым шагом. При разгоне или торможении с постоянным ускорением частота повторения шагов должна изменяться линейно, соответственно значение периода, которое необходимо загружать в таймер, должно меняться по гиперболическому закону.
Резонанс
Шаговым двигателям свойственен нежелательный эффект, называемый резонансом. Эффект проявляется в виде внезапного падения момента на некоторых скоростях. Это может привести к пропуску шагов и потере синхронности. Эффект проявляется в том случае, если частота шагов совпадает с собственной резонансной частотой ротора двигателя.Когда двигатель совершает шаг, ротор не сразу устанавливается в новую позицию, а совершает затухающие колебания. Дело в том, что система ротор – магнитное поле – статор работает как пружинный маятник, частота колебаний которого зависит от момента инерции ротора (плюс нагрузки) и величины магнитного поля.
Резонансную частоту определяет момент инерции собственно ротора двигателя и момент инерции нагрузки на валу двигателя. Поэтому резонансная частота ротора ненагруженного двигателя, которая приводится среди параметров, имеет маленькую практическую ценность, так как любая нагрузка, подсоединенная к двигателю, изменит эту частоту.
Когда используется не микрошаговый режим, основной причиной появления колебаний является прерывистое вращение ротора. При осуществлении шага ротору толчком сообщается некоторая энергия. Этот толчок возбуждает колебания. Энергия, которая сообщается ротору в полушаговом режиме, составляет около 30% от энергии полного шага. Поэтому в полушаговом режиме амплитуда колебаний существенно меньше. В микрошаговом режиме с шагом 1/32 основного при каждом микрошаге сообщается всего около 0.1% от энергии полного шага. Поэтому в микрошаговом режиме явление резонанса практически незаметно.
Способы изменения направления тока
При работе шагового двигателя требуется изменение направления магнитного поля независимо для каждой фазы. Изменение направления магнитного поля может быть выполнено разными способами. В униполярных двигателях обмотки имеют отвод от середины или имеются две отдельные обмотки для каждой фазы. Направление магнитного поля меняется путем перключения половинок обмоток или целых обмоток. В этом случае требуются только два простых ключа A и B для каждой фазы. В биполярных двигателях направление меняется путем переполюсовки выводов обмоток. Для переполюсовки требуется полный H-мост (рисунок ниже). Управление ключами должно осуществляться логической схемой, реализующей нужный алгоритм работы. Предпологается, что источник питания схем имеет номинальное для обмоток двигателя напряжение. После отключения индуктивности от источника питания ток не может мгновено прекратится. Возникает ЭДС (электродвижущая сила) самоиндукции, имеющая противоположное источнику питания направление.Для регулировки момента нужно регулировать силу тока в обмотках. В любом случае, ток должен быть ограничен, чтобы не превысить рассеиваимую мощность на омическом сопротивлении обмоток. Более того, в полушаговом режиме требуется в определенные моменты обеспечивать нулевое значение тока в обмотках, а в микрошаговом режиме вообще требуется задание разных значений тока.
При работе на больших скоростях требуется увеличивать скорость нарастания тока в обмотках, что возможно повышением напряжения источника питания. При этом максимальный ток обмотки должен быть ограничен резистором.
Еще одним методом стабилизации тока в обмотках двигателя является ключевое (ШИМ) регулирование. Это позволяет использовать простые и дешевые нестабилизированные источники питания.
Падение напряжения на этом резисторе зависит от тока в обмотке. Когда ток достигает установленного значения, ключ выключается, что приводит к падению тока. Когда ток спадает до нижнего порога, ключ снова включается. Этот процесс повторяется периодически, поддерживая среднее значение тока постоянным.
Управляя Uref можно регулировать ток фазы, например, увеличивать его при разгоне и торможении и снижать при работе на постоянной скорости. Это напряжение мы и регулируем на драйвере подстроечным резистором.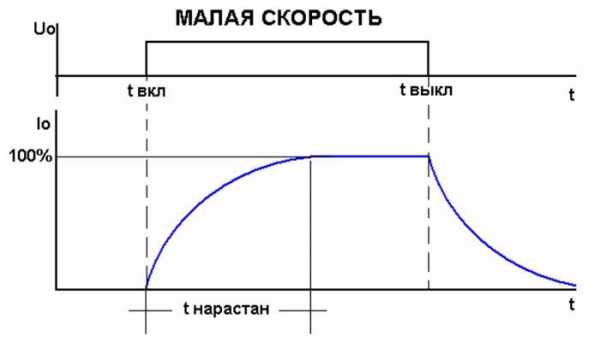
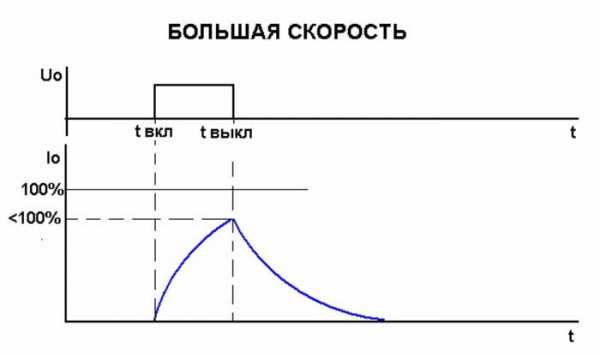 Подстроечным резистором мы регулируем время включения и выключения ключа, т.е. время на отработку микрошага. У того же А4988 имеется автоматическая регулировка спада тока.
Подстроечным резистором мы регулируем время включения и выключения ключа, т.е. время на отработку микрошага. У того же А4988 имеется автоматическая регулировка спада тока.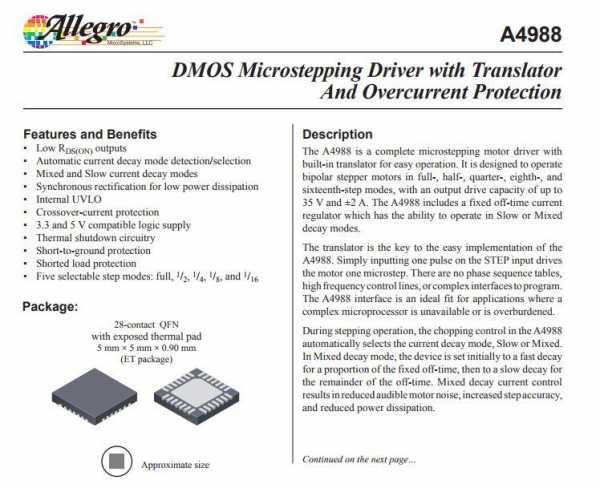
3dtoday.ru
Драйверы от TI: Управляй любым электродвигателем
26 мая 2016
В ассортименте полупроводниковых компонентов производства компании Texas Instruments широко представлены микросхемы драйверов для управления всеми типами электродвигателей, которые, совершенствуясь, находят все более широкое применение в самом различном оборудовании. Компания предлагает решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных, бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.
Электродвигатели находят широчайшее применение в современном высокотехнологическом укладе жизни. Этот тип электромеханического привода по-прежнему является одним из наиболее распространенных и востребованных. Электродвигатели самого разного назначения являются одной из основных составляющих любого производства, повсеместно используются в офисной и домашней технике, в системах мониторинга и управления зданий и объектов. Очень широкое распространение электродвигатели нашли на современном транспорте. Еще более впечатляющее будущее уготовано электродвигателям в электромобилях и роботах.
С развитием технологий традиционные двигатели совершенствуются и находят все новые области применения. Современные высокоточные станки и робототехника немыслимы без электродвигателей с интеллектуальными системами управления. На земле, в воздухе и под водой электродвигатели остаются широко востребованным преобразователем электрической энергии в механическую.
Типы электродвигателей, способы управления и возникающие сложности
Впервые созданный в 1834 году русским ученым Якоби преобразователь электрической энергии во вращательное движение получил название электродвигатель. С тех пор он был серьезно усовершенствован – появилось множество новых вариантов, но использованные при его создании принципы электромагнетизма по-прежнему являются основой всех модификаций современных электродвигателей.
Проводник с проходящим по нему током (рисунок 1) создает вокруг себя магнитное поле, интенсивность (магнитная индукция) которого пропорциональна количеству витков, в случае использования катушки (N), и величине проходящего по ней тока (I), где, В – вектор магнитной индукции, К – магнитная постоянная, N – число витков, I – сила тока.
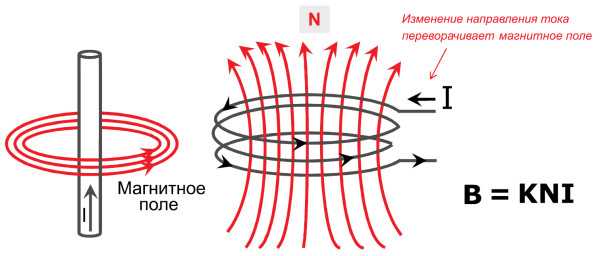
Рис. 1. Электромагнетизм в основе работы электродвигателя
Изменение направления тока влияет и на направление магнитного поля проводника.
При этом на помещенный во внешнее магнитное поле проводник с током действует сила Лоренца, вызывающая его вращательное перемещение. Направление вращения легко определяется с помощью известного правила правой руки для проводника с током в магнитном поле (рисунок 2). Сила (F), действующая на проводник в магнитном поле, равна произведению силы тока (I) в проводнике на вектор магнитной индукции поля (B) и длину проводника (L). F = LIB.
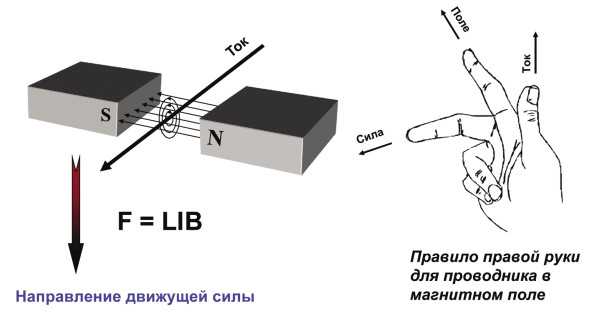
Рис. 2. Перемещение проводника с током в магнитном поле (Сила Лоренца)
Коллекторные двигатели
Коллекторные двигатели постоянного тока (Brushed DC или BDC, по терминологии TI) сегодня относятся к одним из наиболее распространенных механизмов электромагнитного вращения.
В магнитном поле собранного из постоянных магнитов статора вращается многосекционный ротор с катушками, которые попарно и попеременно подключаются через коммутируемые коллекторные ламели на оси ротора (рисунок 3). Выбор пары активируемых катушек выполняется на основании закона Лоренца в соответствии с правилом Буравчика. Источник тока всегда подключен к катушкам, силовые линии магнитного поля которых смещены на угол, близкий к 90°, относительно магнитного поля статора.

Рис. 3. Принцип действия коллекторного электродвигателя (BDC)
Электродвигатели подобного типа часто используют статор с постоянными магнитами. Они позволяют легко регулировать скорость вращения и отличаются невысокой стоимостью.
Также широко используется вариант 2-обмоточного электродвигателя подобного типа, но со статорной обмоткой вместо постоянного магнита. Такие модели обладают большим пусковым моментом и могут работать не только на постоянном, но и на переменном токе. Электродвигатели подобного типа почти повсеместно используются в различной бытовой технике.
К недостаткам этой конструкции BDC стоит отнести износ щеточно-коллекторного узла в процессе эксплуатации. Кроме того, из-за искрообразования при коммутации отдельных обмоток ротора отмечается повышенный уровень электромагнитных помех, что не позволяет использовать такие двигатели во взрывоопасных средах.
Особенностью двигателей BDC также является повышенный нагрев ротора, охлаждение которого затруднено в силу конструктивных особенностей двигателя.
Достоинства коллекторных двигателей:
- малая стоимость;
- простая система управления;
- 2-обмоточные коллекторные двигатели, обладающие высоким крутящим моментом и способные работать на постоянном и переменном токе.
Особенности эксплуатации коллекторных двигателей:
- щетки требуют периодического обслуживания, понижают надежность двигателя;
- в процессе коммутации возникают электрические искры и электромагнитные помехи;
- затруднен отвод тепла от перегревающегося ротора.
Бесколлекторные двигатели
Несколько менее распространенными среди двигателей постоянного тока являются модели с бесщеточной конструкцией (BrushLess DC или BLDC), использующие ротор с постоянными магнитами, которые вращаются между электромагнитами статора (рисунок 4). Коммутация тока здесь выполняется электронным способом. Переключение обмоток электромагнитов статора заставляет магнитное поле ротора следовать за его полем.
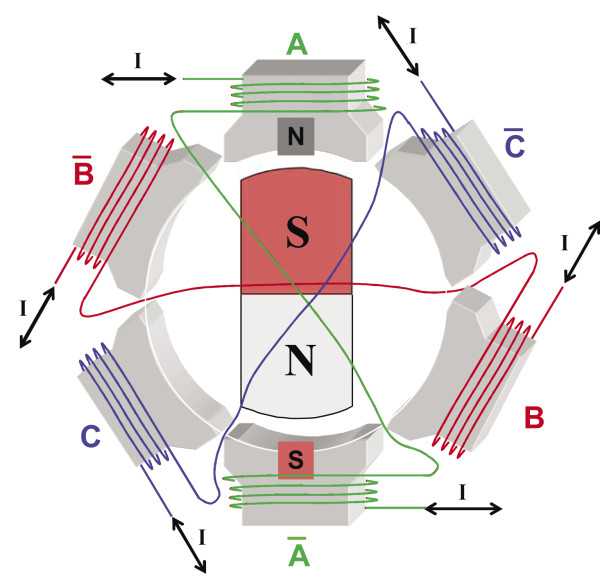
Рис. 4. Принцип действия бесколлекторного электродвигателя (BLDC)
Текущее положение ротора обычно контролируется энкодерами или датчиком на основе эффекта Холла, либо применяется технология с измерением напряжения противо-ЭДС на обмотках без использования в этом случае отдельного датчика положения ротора (SensorLess).
Коммутация тока обмоток статора выполняется с помощью электронных ключей (вентилей). Именно поэтому бесколлекторные двигатели BLDC часто называют «вентильными». Очередность подключения пары обмоток двигателя происходит в зависимости от текущего положения ротора.
Принцип работы BLDC основан на том, что контроллер коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был сдвинут на угол, близкий к 90° или -90° относительно вектора магнитного поля ротора. Вращающееся при переключении магнитное поле заставляет перемещаться вслед за ним ротор с постоянными магнитами.
При использовании трехфазного сигнала управления подключенными к источнику тока всегда оказываются только две пары обмоток, а одна – отключена. В результате последовательно используется комбинация из шести состояний (рисунок 5).
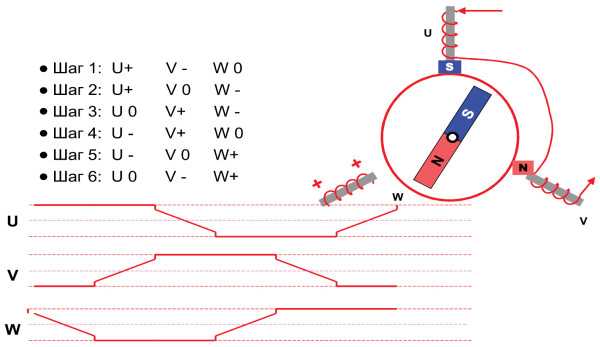
Рис. 5. Чередование фаз при вращении BLDC
Электродвигатели без датчиков положения ротора отличаются повышенной технологичностью процесса изготовления и более низкой стоимостью. Подобная конструкция упрощает герметизацию внешних подключаемых выводов.
В качестве датчиков скорости и положения ротора в BLDC могут использоваться датчики Холла, которые отличаются небольшой стоимостью, но также и достаточно невысоким разрешением. Повышенное разрешение обеспечивают вращающиеся трансформаторы (резольверы). Они отличаются высокой стоимостью и требуют использования ЦАП, так как выходной сигнал у них синусоидальный. Высоким разрешением, но пониженной надежностью, обладают оптические датчики. На рисунке 6 представлены выходные сигналы датчиков разного типа при вращении ротора двигателя.
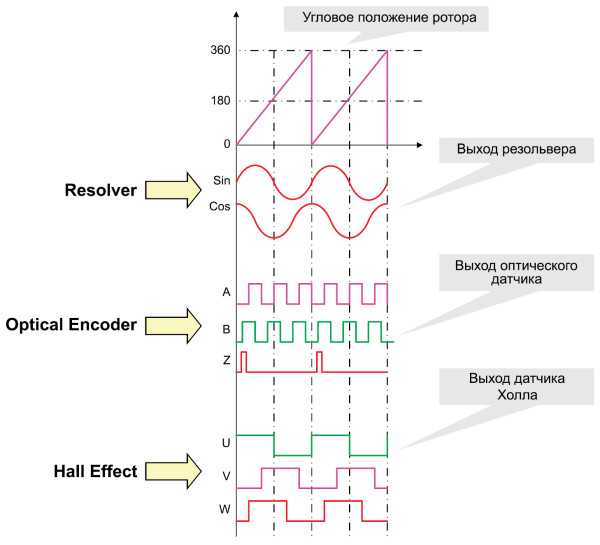
Рис. 6. Датчики положения ротора электродвигателей
Преимущества двигателей BLDC:
- высокая эффективность;
- отсутствие щеток, обеспечивающее повышенную надежность, снижение затраты на обслуживание;
- линейность тока/крутящего момента;
- упрощенный отвод тепла.
Особенности применения двигателей BLDC:
- более сложная система управления с обратной связью по положению ротора;
- пульсации крутящего момента.
Шаговые двигатели
Шаговые двигатели (ШД) получили достаточно широкое распространение в системах автоматики и управления. Они являются еще одним типом бесколлекторных двигателей постоянного тока. Конструктивно ШД состоят из статора, на котором размещены обмотки возбуждения, и ротора, выполненного из магнитных материалов. Шаговые двигатели с магнитным ротором позволяют обеспечить больший крутящий момент и жесткую фиксацию ротора при обесточенных обмотках.
В процессе вращения ротор ШД перемещается шагами под управлением подаваемых на обмотки статора импульсов питания. Шаговые двигатели удобны для использования в приводах машин и механизмов, работающих в старт-стопном режиме. Их диапазон перемещения задается определенной последовательностью электрических импульсов. Такие двигатели отличаются высокой точностью, не требуют датчиков и цепей обратной связи. Угол поворота ротора зависит от количества поданных импульсов управления. Точность позиционирования (величина шага) зависит от конструктивных особенностей двигателя, схемы подключения обмоток и последовательности подаваемых на них управляющих импульсов.
В зависимости от конфигурации схемы подключения обмоток шаговые двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет в каждой из двух фаз единую обмотку для обоих полюсов статора, которая для изменения направления магнитного поля должна переполюсовываться драйвером. Биполярный двигатель имеет две обмотки и, соответственно, четыре вывода. Для управления таким ШД требуется мостовой драйвер или полумостовая схема с 2-полярным питанием. При биполярном управлении одновременно работают две обмотки и крутящий момент примерно на 40% больше. На рисунке 7 представлена последовательность сигналов управления при вращении биполярного ШД.
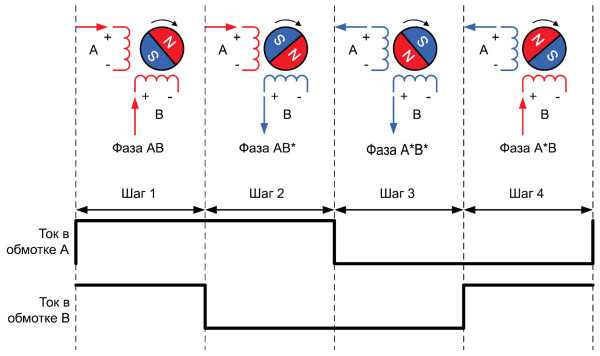
Рис. 7. Последовательность сигналов управления биполярным ШД
Униполярный двигатель использует в каждой фазе одну обмотку со средним выводом и позволяет использовать более простую схему управления с одним ключом на каждую из четырех полуобмоток.
Четырех обмоточные ШД могут использоваться как в биполярной, так и в униполярной конфигурации.
При протекании тока по одной из катушек ротор стремится изменить положение так, чтобы противоположные полюса ротора и статора установились друг против друга. Для непрерывного вращения ротора катушки попеременно переключают.
На практике используются разные способы подачи питания на четыре обмотки статора. Чаще всего применяют попарное подключение с полношаговым или полушаговым режимом работы. В полношаговом режиме ротор с двумя полюсами, вращающийся в переключаемом магнитном поле двух пар катушек, может занимать четыре положения (рисунок 8).
Рис. 8. Полношаговый режим управления ШД
Получить удвоенную точность позиционирования и восемь позиций позволяет полушаговый режим работы (рисунок 9). Для его реализации добавляется промежуточный шаг с одновременной запиткой всех четырех катушек.
Рис. 9. Полушаговый режим управления ШД
Значительно увеличить количество промежуточных положений и точность позиционирования позволяет режим микрошага. Идея микрошага заключается в подаче на обмотки шагового двигателя вместо импульсов управления непрерывного сигнала, напоминающего по форме ступенчатую синусоиду (рисунок 10). Полный шаг в этом случае делится на маленькие микрошаги, а вращение становится более плавным. Режим микрошага позволяет получить наиболее точное позиционирование. Кроме того, в этом режиме значительно снижается присущая шаговым двигателям вибрация корпуса.
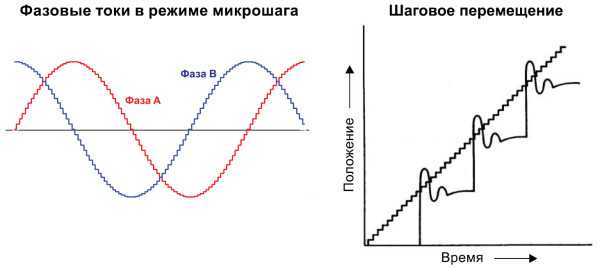
Рис. 10. Управление ШД в режиме микрошага
Достоинства шаговых двигателей:
- невысокая стоимость благодаря отсутствию схем контроля скорости вращения и позиционирования;
- высокая точность позиционирования;
- широкий диапазон скоростей вращения;
- простой интерфейс управления с цифровыми контроллерами;
- очень высокая надежность;
- хороший удерживающий момент.
Особенности применения шаговых двигателей:
- ШД присуще явление резонанса;
- из-за отсутствия обратной связи возможна потеря контроля положения;
- потребление энергии не уменьшается даже при работе без нагрузки;
- затруднена работа на очень высоких скоростях;
- невысокая удельная мощность;
- достаточно сложная схема управления.
Традиционные решения для управления электродвигателями
Современная прецизионная система управления электродвигателем постоянного тока включает в себя микроконтроллер для обработки данных и блок управления питанием обмоток двигателя, часто называемый драйвером. В состав драйвера входит логическая схема для преобразования кодированных посылок в цифровые управляющие сигналы, из которых в блоке Gate Driver формируются аналоговые сигналы для управления силовыми ключами на основе полевых транзисторов (FET). FET могут входить в состав драйвера или размещаться в отдельном блоке. Кроме того, в состав драйвера входят схемы защиты силовых цепей и цепи обратной связи для контроля работы двигателя.
На рисунке 11 представлены варианты блок-схем для интегрированного и предварительного драйверов. Каждое из решений имеет свои преимущества и особенности. Предварительный драйвер (Pre-Driver) имеет значительно облеченный температурный режим, позволяет выбирать внешние силовые ключи в соответствии с мощностью подключаемого двигателя. Полнофункциональный интегрированный драйвер позволяет создавать более компактные системы управления, минимизирует внешние соединения, но значительно усложняет обеспечение необходимого температурного режима.
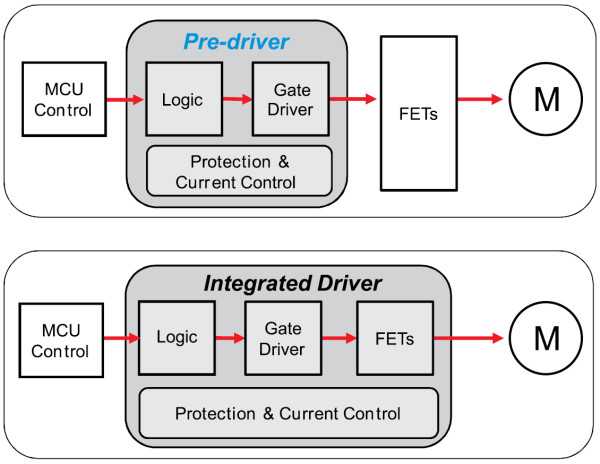
Рис. 11. Блок-схемы систем управления двигателем
Так, у интегрированного драйвера TI DRV8312 максимальная рабочая температура отдельных элементов на плате может достигать 193°С, а у предварительного драйвера DRV8301 этот показатель не превышает 37°С.
Рис. 12. Смена направления вращения коллекторного двигателя
Одной из наиболее распространенных схем для коммутации обмоток двигателей является мост типа “H”. Название схемы связано с конфигурацией подключения, которая похожа на букву “H”. Эта электронная схема позволяет легко изменять направление тока в нагрузке и, соответственно, направление вращения ротора. Напряжение, прикладываемое к обмоткам через транзисторы моста, может быть как постоянным, так и модулированным с помощью ШИМ. H-мост предназначен, в первую очередь, для смены полярности питания двигателя – реверса (рисунок 12), но также позволяет тормозить вращение, коротко замыкая выводы обмоток (рисунок 13).
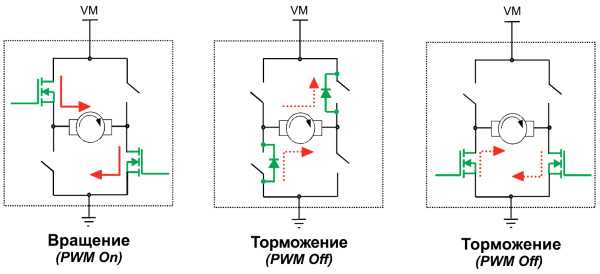
Рис. 13. Режимы вращения, быстрого и медленного торможенияс
Важнейшей характеристикой силовых элементов моста, в качестве которых сегодня часто используют полевые транзисторы с изолированным затвором, является величина сопротивления открытого канала между истоком и стоком транзистора – RDSON. Значение RDSON во многом определяет тепловые характеристики блока и энергетические потери. С увеличением температуры RDSON также растет, а ток и напряжение на обмотках уменьшаются.
Использование управляющих сигналов с ШИМ позволяет уменьшить пульсации крутящего момента и обеспечить более плавное вращение ротора двигателя. В идеале частота ШИМ должна быть выше 20 кГц, чтобы избежать акустического шума. Но с увеличением частоты растут потери на транзисторах моста в процессе коммутации.
Из-за индуктивных свойств нагрузки в виде обмоток форма тока в ней не соответствует форме подаваемого напряжения ШИМ. После подачи импульса напряжения ток нарастает постепенно,а в паузах ток плавно затухает из-за возникновения в обмотках противо-ЭДС. Наклон кривой на графике тока, амплитуда и частота пульсаций влияют на рабочие характеристики двигателя (пульсации крутящего момента, шум, мощность и так далее).
Для ускоренного затухания в обмотках электродвигателей возбуждаемого эффектом противо-ЭДС тока используют диоды в обратном включении, шунтирующие переходы «сток-исток» транзисторов, либо закорачивают обмотки через переходы «сток-исток» двух транзисторов, одновременно включенных в разных плечах моста. На рисунке 13 представлены три состояния моста: рабочее, быстрого торможения (Fast Decay) и медленного торможения (Slow Decay).
А наиболее эффективным считается комбинированный режим (Mixed Decay), при котором в паузе между рабочими импульсами сначала работают диоды, шунтирующие сток-исток транзисторов, а затем включаются транзисторы в нижних плечах моста.
Решения для управления электродвигателями от TI
Среди полупроводниковых компонентов, выпускаемых компанией TI, представлен обширный ассортимент различных драйверов для управления электродвигателями постоянного тока. Все они требуют минимума внешних компонентов, позволяют создавать компактные решения для управления двигателями с рабочим напряжением до 60 В, отличаются повышенной надежностью, обеспечивают быстрое и простое проектирование систем привода электродвигателями.
Встроенные в драйверы интеллектуальные функции требуют минимальной поддержки внешнего управляющего микроконтроллера (MCU), обеспечивают расширенные коммутационные возможности для обмоток, поддерживают внешние датчики и цифровые контуры управления. Комплекс защитных функций включает ограничение напряжения питания, защиту от превышения тока и короткого замыкания, понижения напряжения и повышения рабочей температуры.
Весь модельный ряд драйверов TI разбит на три раздела: шаговые, коллекторные и бесколлекторные двигателей постоянного тока. В каждом из них на сайте компании действует удобная система подбора по целому ряду параметров. Есть отдельные драйверы, предназначенные для использования с двигателями разных типов.
Драйверы TI для шаговых двигателей
Большой раздел решений TI для управления двигателями включает драйверы для ШД (рисунок 14), которые выпускаются как со встроенными силовыми ключами на основе FET, так и в виде предварительных драйверов, предоставляющих пользователю подбор необходимых силовых ключей. Всего в модельном ряду компании более 35 драйверов для ШД.
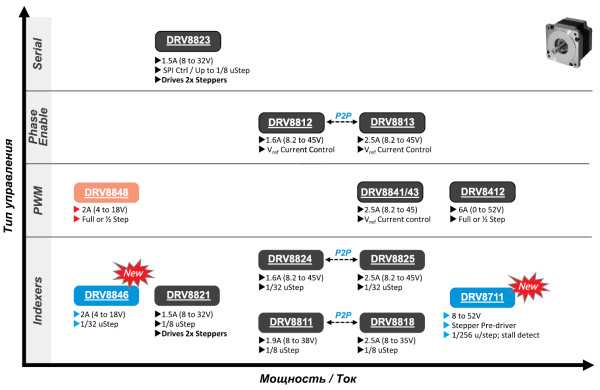
Рис. 14. Драйверы TI для управления шаговыми двигателями
TI предлагает широкий выбор наиболее современных решений для управления перемещением и точным позиционированием с использованием микрошаговых схем управления, обеспечивающих электродвигателей плавным перемещением в широком диапазоне напряжения и тока.
Отдельные драйверы, используя один управляющий контроллер, позволяют управлять сразу двумя двигателями, имея для этого четыре встроенных моста на основе FET. Есть драйверы с встроенными FET, например, DRV8834, которые можно подключить для управления к двум обмоткам шагового двигателя или использовать эти же выводы для управления двумя электродвигателями постоянного тока (рисунок 15).
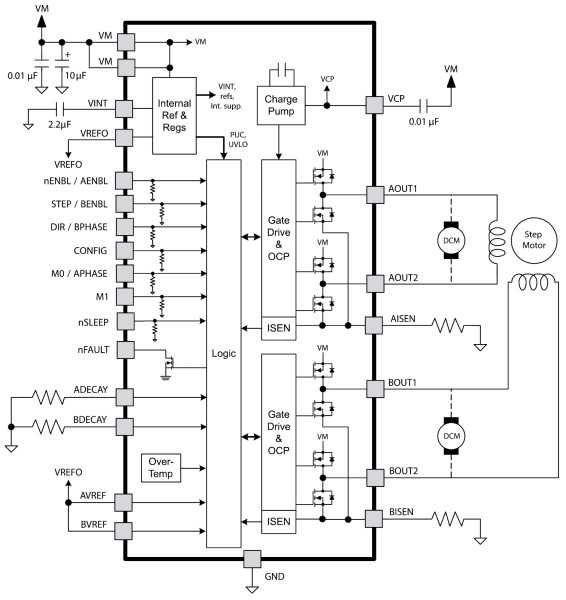
Рис. 15. Блок-схема драйвера DRV8834
Для более плавного перемещения ротора в драйверах для ШД используется настраиваемый механизм сглаживания импульсов тока (режимы Slow, Fast, Mixed Decay). Система расчета микрошага может быть следующих типов:
- встроенной в драйвер;
- с использованием внешнего опорного сигнала.
Не требуют внешнего контроллера для микрошагового перемещения драйверы DRV881, DRV8818, DRV8821, DRV8824 и DRV8825. Здесь шаг перемещения и алгоритм коммутации обмоток рассчитываются схемой, встроенной в драйвер.
Более простые драйверы DRV8812, DRV8813, DRV8828, DRV8829, DRV8841, DRV8842 и DRV8843 обеспечивают микрошаговое вращение с использованием получаемого от внешнего контроллера опорного напряжения (Vref). Уровень дробления основного шага может достигать 1/128 или 1/256.
Для управления ШД с униполярным подключением обмоток TI предлагает драйверы DRV8803, DRV8804, DRV8805 и DRV8806.
Драйверы TI для BDC
Для управления – коллекторными электродвигателями постоянного тока – предназначено специальное семейство драйверов DRV8x, ряд представителей которого изображен на рисунке 16. Они обеспечивает полную защиту от превышения напряжения и тока, короткого замыкания и перегрева. Благодаря возможностям интерфейса управления эти драйверы обеспечивают простую и эффективную эксплуатацию двигателей. Пользователи могут с помощью одного чипа управлять одним или несколькими двигателями c рабочим напряжением 1,8…60 В.
Рис. 16. Драйверы TI для управления коллекторными двигателями
Драйверы семейства выпускаются как с интегрированными силовыми ключами, так и как предварительные драйверы. Они требуют минимум дополнительных компонентов, обеспечивают компактность решений, сокращают время разработки и позволяют быстрее выпустить новые продукты на рынок.
Спящий режим (Sleep) позволяет минимизировать потребление энергии в режиме простоя и обеспечивает ускоренную активизацию при запуске двигателя. Для управления скоростью вращения могут использоваться внешние сигналы ШИМ или сигналы PHASE/ENABLE для выбора направления вращения и включения ключей выходного моста.
Имеющий четыре выходных моста драйвер DRV8823 способен управлять двумя ШД или одним ШД и двумя BDC, или же четырьмя BDC, используя при этом управляющий интерфейс SPI.
На рисунке 17 представлена функциональная схема простого драйвера DRV8837 для управления одним коллекторным двигателем.
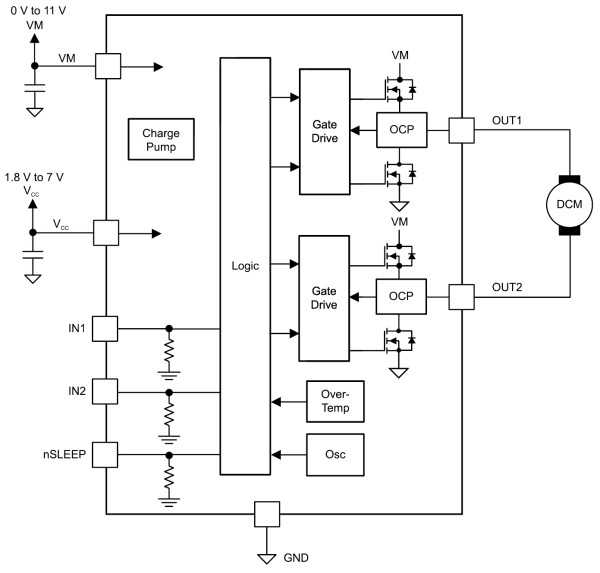
Рис. 17. Блок-схема драйвера DRV8837
Драйверы TI для BLDC
Драйверы TI для бесколлекторных двигателей, или BLDC, могут включать интегрированный силовой мост или использовать внешние силовые транзисторы. Схема формирования 3-фазных сигналов управления также может быть внешней или встроенной.
Семейство драйверов для управления бесколлекторными электродвигателями включает модели c разным принципом управления и с различным крутящим моментом. Эти драйверы, обеспечивающие разные уровни шума при управлении BDLС, идеально подойдут для использования в промышленном оборудовании, автомобильных системах и другой технике. Чтобы гарантировать надежную эксплуатацию электродвигателей, драйверы обеспечивают всеобъемлющий набор защит от превышения тока, напряжения и температуры. На рисунке 18 представлены лишь некоторые из 3-фазных драйверов для BLDC в обширном и постоянно пополняющемся модельном ряду компании TI.
Рис. 18. Драйверы TI для управления бесколлекторными двигателями
Для контроля текущего положения вращающегося ротора могут использоваться внешние датчики разных типов или схема управления с определением позиции ротора по величине противо-ЭДС (Back Electromotive Force, BEMF).
Управление может выполняться с помощью ШИМ, аналоговых сигналов или через стандартные цифровые интерфейсы. Наборы настраиваемых параметров для управления вращением могут храниться во внутренней энергонезависимой памяти.
На рисунке 19 представлен работающий в широком диапазоне температур 40…125°C интеллектуальный драйвер для BLDC со встроенными силовыми ключами на полевых транзисторах, с сопротивлением открытого канала лишь 250 мОм. При диапазоне рабочих напряжений 8…28 В драйвер может обеспечивать номинальный ток 2 А и пиковый ток 3 А.
Рис. 19. Блок-схема драйвера DRV10983
Драйвер не требует внешнего датчика для контроля положения ротора, но может использовать внешний резистор для контроля потребляемой двигателем мощности. DRV10983 отличается незначительным энергопотреблением, составляющим всего 3 мА, в дежурном режиме. А в модели DRV10983Z этот показатель доведен до уровня 180 мкА.
Встроенный интерфейс I2C обеспечивает диагностику и настройку, доступ к регистрам управления работой логической схемы и хранящимся в памяти EEPROM рабочим профилям драйвера.
Расширенный комплект защитных функций обеспечивает остановку двигателя в случае превышения тока и понижения напряжения. Предусмотрено ограничение входного напряжения. Защита по превышению тока работает без использования внешнего резистора. Методы использования защиты настраиваются через специальные регистры.
Заключение
Электродвигатели находят все более широкое применение в самом различном оборудовании, совершенствуются и получают новые возможности во многом благодаря современным системам электропривода.
В ассортименте полупроводниковых компонентов производства компании Texas Instruments широко представлены микросхемы драйверов для управления всеми типами двигателей постоянного тока. На их основе компания предлагает масштабируемые в зависимости от требований по точности, мощности и функциональности решения для создания приводов, работающих в широком диапазоне токов и напряжений, обеспечивающих надежную и удобную эксплуатацию коллекторных, бесколлекторных и шаговых двигателей с полным комплексом защит по току, напряжению и температуре.
Получение технической информации, заказ образцов, заказ и доставка.
•••
Наши информационные каналы
www.compel.ru
Драйвер шагового двигателя (Troyka-модуль) [Амперка / Вики]
Для управления шаговым двигателем при помощи микроконтроллера нужно не только управлять большой нагрузкой, но и обеспечить необходимую последовательность управляющих импульсов. Драйвер шагового двигателя из линейки Troyka-модулей позволяет микроконтроллеру управлять биполярным и униполярным шаговым двигателем.
Элементы платы
Подключение двигателя
На контакты 1, 2 подключается первая обмотка биполярного шагового двигателя. На контакты 3, 4 — вторая обмотка. Униполярный двигатель подключается точно также, просто не используются выводы из середин обмоток.
Питание двигателя
На колодки Vin подаётся напряжение 4,5–25 В постоянного тока. Для питания двигателя рекомендуется использовать отдельный контур питания, не связанный с цепью питания управляющего контроллера.
К примеру, если вы используете Arduino, не рекомендуется использовать питание с пина 5V Arduino. Это может привести к перезагрузке управляющего контроллера, или к перегрузке регулятора напряжения Arduino. В некоторых случаях допускается использовать для питания шагового двигателя пин Vin Arduino. Например, если Arduino запитана от мощного внешнего источника питания 7–12 В, напряжение которого при включении двигателя не падает ниже 7 В.
Контакты подключения 3-проводного шлейфа
Troyka-Stepper подключается к управляющей электронике по трём 3-проводным шлейфам. Назначение контактов 3-проводных шлейфов:
Питание (V) — красный провод. На него должно подаваться напряжение 3,3–5 В, которое используется для питания логической части драйвера шагового двигателя.
Земля (G) — чёрный провод. Должен быть соединён с землёй микроконтроллера.
Сигнальный — жёлтый провод. Через него происходит управление соответствующим пином модуля.
Для управления модулем используется от одного до трёх сигнальных контакта:
Step. Каждый раз, когда напряжение на этом контакте переходит из низкого уровня напряжения в высокий, шаговый двигатель делает следующий шаг.
Direction. Направление вращения шагового двигателя зависит от схемы подключения его обмоток и от напряжения на этом пине. Если на пине direction установлен высокий уровень напряжения, двигатель вращается в одну сторону. Если низкий — в другую. Если изменять направление вращения двигателя не нужно, вы можете не подключать этот контакт к микроконтроллеру.
- Enable. Высокий уровень на этом пине включает подачу напряжения на двигатель. При остановке шагового двигателя в определённом положении, питание продолжает поступать на его управляющую обмотку. Это приводит к нагреву шагового двигателя и излишнему расходу электроэнергии. Чтобы отключить подачу питания на двигатель, достаточно выставить низкий уровень напряжения на этом контакте. При остановке двигателя бывает полезно подать на этот контакт ШИМ-сигнал. Это позволит оставить на двигателе небольшое усилие, необходимое для удержания вала в текущем положении. Электроэнергии в таком случае будет тратится значительно меньше. Если нет необходимости управлять включением двигателя, вы можете не подключать этот контакт к микроконтроллеру. Тогда ток через обмотки двигателя будет течь всегда, если есть напряжение питания.
Индикатор вращения двигателя
Светодиодный индикатор. Горит зелёным при шаге в одну сторону, красным – при шаге в другую сторону.
Пример использования
- troykaStepper.ino
// Troyka-Stepper подключён к следующим пинам: const byte stepPin = 7; const byte directionPin = 8; const byte enablePin = 11; // Выдержка для регулировки скорости вращения int delayTime = 20; void setup() { // Настраиваем нужные контакты на выход pinMode(stepPin, OUTPUT); pinMode(directionPin, OUTPUT); pinMode(enablePin, OUTPUT); } void loop() { // Подаём питание на двигатель digitalWrite(enablePin, HIGH); // Задаём направление вращения по часовой стрелке digitalWrite(directionPin, HIGH); // Делаем 50 шагов for (int i = 0; i < 50; ++i) { // Делаем шаг digitalWrite(stepPin, HIGH); delay(delayTime); digitalWrite(stepPin, LOW); delay(delayTime); } // Переходим в режим экономичного удержания двигателя... analogWrite(enablePin, 100); //... на три секунды delay(3000); // Меняем направление вращения digitalWrite(directionPin, LOW); // Включаем двигатель на полную мощность digitalWrite(enablePin, HIGH); // Делаем 50 шагов for (int i = 0; i < 50; ++i) { digitalWrite(stepPin, HIGH); delay(delayTime); digitalWrite(stepPin, LOW); delay(delayTime); } // Ничего не делаем без отключения двигателя delay(3000); // Отключаем двигатель digitalWrite(enablePin, LOW); // Ничего не делаем до перезагрузки while (true) { ; } }
Характеристики модуля
| Номинальное напряжение питания двигателя | 4,5–25 В |
| Пиковое напряжение на контактах Vin | 35 В |
| Напряжение питания логической части | 3,3–5 В |
| Длительно допустимый ток | до 600 мА |
| Пиковый ток | 1200 мА |
Ресурсы
wiki.amperka.ru
Выбираем драйвер шагового двигателя | PureLogic R&D
Наличие опторазвязанных входов
Третий аспект — наличие опторазвязанных входов. Практически во всех драйверах и контроллерах, выпускаемых на заводах, тем более брендовых, опторазвязка стоит обязательно, ведь драйвер — устройство силовой электроники, и пробой ключа может привести к мощному импульсу на кабелях, по которым подаются управляющие сигналы, и выгоранию дорогостоящего ЧПУ-контроллера. Однако, приобретая незнакомую модель, стоит дополнительно поинтересоваться наличием оптоизоляции входов и выходов.
Наличие механизмов подавления резонанса
Четвертый аспект — наличие механизмов подавления резонанса. Резонанс шагового двигателя — явление, которое проявляется всегда. Разница состоит только в резонансной частоте, которая прежде всего зависит от момента инерции нагрузки, напряжения питания драйвера и установленной силы тока фазы мотора. При возникновении резонанса шаговый двигатель начинает вибрировать и терять крутящий момент, вплоть до полной остановки вала. Для подавления резонанса используется микрошаг и встроенные алгоритмы компенсации резонанса. Колеблющийся в резонансе ротор шагового двигателя порождает микроколебания ЭДС-индукции в обмотках, и по их характеру и амплитуде драйвер определяет, есть ли резонанс и насколько он силен. В зависимости от полученных данных драйвер несколько смещает шаги двигателя во времени относительно друг друга — такая искусственная неравномерность нивелирует резонанс. Механизм подавления резонанса встроен во все драйверы Purelogic R&D. Драйверы с подавлением резонанса — высококачественные устройства, и если бюджет позволяет, лучше брать именно такие. Впрочем, и без этого механизма драйвер остается вполне рабочим: основная масса проданных драйверов не имеют компенсации резонанса. Тем не менее, десятки тысяч станков без проблем работают по всему миру и успешно выполняют свои задачи.
Наличие защитных функций
Шестой аспект — наличие защитных функций. Среди них — защита от превышения питающего напряжения, тока обмоток (в т. ч. от короткого замыкания обмоток), переполюсовки питающего напряжения, неправильного подключения фаз шагового мотора. Чем больше таких функций, тем лучше.
Наличие микрошаговых режимов
Седьмой аспект — наличие микрошаговых режимов. Сейчас практически в каждом драйвере есть множество микрошаговых режимов. Однако из каждого правила есть исключения, и в драйверах Geckodrive режим только один – деления шага 1/10. Мотивируется это тем, что большее деление не приносит большей точности, а значит, в нем нет необходимости. Однако практика показывает, что микрошаг полезен вовсе не повышением дискретности позиционирования или точности, а тем, что чем больше деление шага, тем плавней движение вала мотора и меньше резонанс. Соответственно, чем больше деление при прочих равных условиях, тем лучше. Максимально допустимое деление шага будет определяться не только встроенными в драйвер таблицами Брадиса, но и максимальной частотой входных сигналов. Так, для драйвера с входной частотой 100 кГц нет смысла использовать деление 1/256, так как скорость вращения будет ограничена 100 000 / (200 * 256) * 60 = 117 об/мин, что для шагового двигателя очень мало. Кроме того, персональный компьютер тоже с трудом сможет генерировать сигналы с частотой более 100 кГц. Если вы не планируете использовать аппаратный ЧПУ-контроллер, то 100 кГц, скорее всего, будет Вашим потолком, что соответствует делению 1/32.
Наличие дополнительных функций
Восьмой аспект — наличие дополнительных функций. Их может быть множество, например, функция определения «срыва» — внезапной остановки вала при заклинивании или нехватки крутящего момента у шагового двигателя, выходы для внешней индикации ошибок и т. п. Все они не являются необходимыми, но могут сильно облегчить жизнь при построении станка.
Качество драйвера
Девятый, и самый важный аспект — качество драйвера. Оно практически не связано с характеристиками и т. п. Определить уровень драйвера заранее по каким-то косвенным данным новичку достаточно трудно. Можно попробовать ориентироваться на количество интеллектуальных функций, таких как подавление резонанса, морфинг, а также воспользоваться проверенным способом — ориентироваться на бренды и качество технической поддержки.
purelogic.ru
