
Виды и типы роботов в Мире, обзоры
Основные виды роботов в Мире
Существует множество способов определения различных типов и видов роботов. Как мы видим, возможные разногласия сильно различаются. Основная причина этих различий заключается в том, что разные ученые и преподаватели часто имеют разные взгляды на то, что следует преподавать в рамках «робототехники».
Например, некоторые преподаватели, которые преподают робототехнику, обычно сосредоточены в основном на промышленной робототехнике, полностью игнорируя сервисные роботы. Поэтому, говоря о типах и видах роботов, они обычно говорят о типах промышленных роботов. Для этого есть веская причина: огромное большинство инженеров-роботологов придется заниматься преимущественно промышленными роботами в своей карьере.
Тем не менее, промышленные роботы не единственные. Поэтому, как мы видим, при разделении роботов на типы это разделение должно быть достаточно широким, чтобы включать все, что можно понимать как робот.
Есть два возможных способа, как это можно сделать. Во-первых, вы можете разделить роботов на типы по их приложению, а во-вторых – по пути их перемещения (или нет). Мы признаем, что существуют и другие возможные способы разделения роботов на типы, но, на наш взгляд, эти два являются лучшими. Кроме того, мы предпочитаем использовать обе эти классификации вместе. Таким образом, на два вопроса о роботе уже будет дан ответ: «Что он делает?» и «Как это происходит?»
Типы роботов в Мире
В настоящее время роботы выполняют множество различных задач во многих областях, и количество заданий, возложенных на роботов, неуклонно растет. Вот почему, на наш взгляд, одним из лучших способов разделить роботов на типы является разделение по их приложению.
Какие бывают роботы:
Промышленные роботы.
Промышленные роботы – это роботы, используемые в промышленной производственной среде. Обычно это шарнирные рычаги, специально разработанные для таких применений, как сварка, обработка материалов, окраска и другие. Если мы судим исключительно по спросу, этот тип может также включать некоторые автоматизированные управляемые транспортные средства и другие роботы.
Бытовые роботы.
Бытовые роботы – это роботы, используемые дома. Этот тип роботов включает в себя множество совершенно разных устройств, таких как роботизированные пылесосы, роботизированные очистители для бассейна, подметальные машины, очистители желобов и другие роботы, которые могут выполнять различные обязанности. Кроме того, некоторые роботы наблюдения и телеприсутствия могут рассматриваться как бытовые роботы, если они используются в этой среде.
Медицинские роботы.
Медицинские роботы – это роботы, используемые в медицине и медицинских учреждениях. В первую очередь – хирургические роботы. Кроме того, некоторые автоматизированные управляемые транспортные средства и, возможно, подъем помощников.
Сервисные роботы.
Сервисные роботы – это роботы, которые не попадают в другие типы по использованию. Это могут быть разные роботы сбора данных, роботы, созданные для демонстрации технологий, роботов, используемых для исследований и т.д.
Военные роботы.
Военные роботы – это роботы, используемые в армии. Этот тип роботов включает роботы для уничтожения бомб, различные транспортные роботы, разведывательные беспилотники. Часто роботы, первоначально созданные для военных целей, могут использоваться в правоохранительных органах, поисково-спасательных и других смежных областях.
Развлекательные роботы.
Развлекательные роботы – это роботы, используемые для развлечения. Это очень широкая категория. Он начинается с игрушечных роботов, таких как robosapien или работающего будильника, и заканчивается настоящими тяжеловесами, такими как шарнирные рычаги робота, используемые в качестве симуляторов движения.
Космические роботы.
Мы бы хотели выделить роботов, используемых в космосе, как отдельный тип. Этот тип будет включать в себя роботы, используемые на Международной космической станции, Canadarm, которая использовалась в «Шаттлах», а также марсоходы и другие роботы, используемые в космосе.
Теперь, как вы можете видеть, есть примеры, которые вписываются в более чем один из этих типов. Например, может быть глубоководный исследовательский робот, который может собрать ценную информацию, которая может использоваться в военных целях.
Кинематика роботов и их типы
Как вы понимаете, приложение робота не предоставляет достаточной информации, когда речь идет о конкретном роботе. Например, промышленный робот – обычно, говоря о промышленных роботах, мы думаем о стационарных роботах в рабочей ячейке, которые выполняют определенную задачу. Все в порядке, но если на заводе есть AGV (Automated Guided Vehicle)? Это также роботизированное устройство, работающее в промышленной среде. Поэтому мы предлагаем использовать обе эти классификации вместе.
Итак, есть:
1. Стационарные роботы (в том числе роботизированные рукава с глобальной осью движения)
1.1 Картезианские / козловые роботы
1.3 Сферические роботы
1.4 роботы SCARA
1.5 Сочлененные роботы (роботизированные руки)
1.6 Параллельные роботы
2. Колесные роботы
2.1 Одноколесные (шаровые) роботы
2.2 Двухколесные роботы
2.3 Три и более колесных роботов
3. Легкие роботы
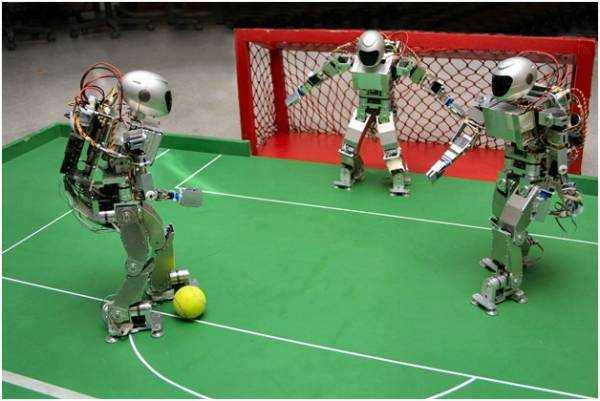
3.1. Двуногие роботы (роботы-гуманоиды)
3.2 Роботы-роботы
3.3 четвероногих роботов
3.4 гексаподобные роботы
3.5 другое количество ножек
4. Плавающие роботы
5. Летающие роботы
6. Мобильные сферические роботы (роботизированные шарики)
7. Рой-роботы
8. Другие..
Хотите узнать о других? Да, есть и другие. Например, змееподобные роботы. Есть много областей исследований, которые занимаются различными инновационными типами роботов. Когда-нибудь они будут очень полезны. Тем не менее, теперь мы будем использовать их под типом «другие».
Конечно, ничего из этого не вырезано в камне, особенно в робототехнике, где все меняется почти ежемесячно в наши дни. Тем не менее, по-нашему, эти типы классификации делают свою работу достаточно хорошо.
robroy.ru
Какие бывают роботы: Классификация роботов
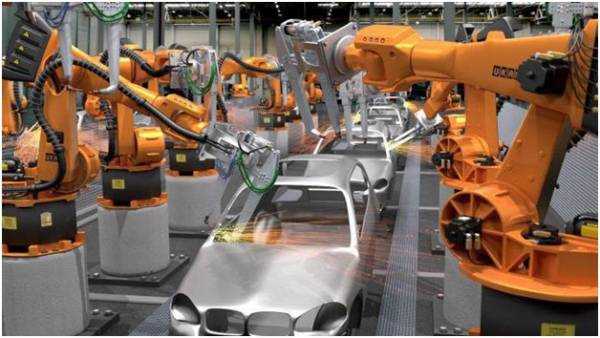
Классификация роботов очень обширна. Чтобы представить какие бывают роботы необходимо структурировать знания. Уже в наше время роботы вошли в производственные и бытовые процессы общества. Не возможно представить производство автомобилей без запрограммированных роботов-сварщиков или обезвреживание минного поля с помощью роботов-сапёров в местах боевых конфликтов.
Дроны и искусственный интеллект эволюционирует, постоянно изобретаются новые типы роботов и спектр их применения расширяется постоянно. Какие же бывают роботы?
Роботы подразделяются
Классификация роботов по типу управления:
- Автономные — совершающие целевую работу или задачу без вмешательства человека. Такие роботы получают и обрабатывают информацию из окружающей среды самостоятельно с помощью технологии искусственного интеллекта. Они более совершенны с технической точки зрения. Самое примечательное что человечество не смогло создать разумного робота, способного к критическому мышлению. Зачастую такие машины ошибаются там, где человек без труда выходит из ситуации. К таким ботам можно отнести комбайны с технологией беспилотной работы, беспилотные автомобили и дроны курьеры.
- Полуавтономные — выполняющие задачу без вмешательства человека, при этом по заранее определённому алгоритму. Эти боты более надёжны, по той причине что работают по определённому набору правил. Они запрограммированы создателем той или иной модели. К таким роботам относятся роботы-сборщики на линиях сборки автомобилей, или станки ЧПУ запрограммированные на какое-либо изделие.
- Управляемые — управляемые человеком непосредственно либо дистанционно. Позволяют решать задачи управляя посредством пульта управления или иных устройств ввода сигнала. К таким роботам можно отнести экзоскелеты или просто детская машинка на дистанционном управлении.
Классификация по типу позиционирования:
- Стационарные — монтированные в фундамент, к несущим стенам или потолку по отношению к обслуживаемому оборудованию. Чаще используются на производстве где рутинная или тяжелая работа позволяет повысить эффективность и скорость производства продукции. Это сварщики, сборщики, упаковщики, подъёмники и др.
- Передвижные — способные перемещаться в пространстве с помощью шасси, либо по ограниченной траектории по рельсам или индуктивным и оптическим трассам. К таким относятся роботы на колёсах, гусеницах, квадрокоптеры и др.
Классификация по типу назначения:
- Промышленные — участвующие в производственном процессе изготовления изделий и деталей.
- Бытовые — предназначенные для облегчения жизнедеятельности человека.
- Медицинские — предназначенные для работы в медицинской отрасли, облегчающие труд врачам и помогающие исключить человеческий фактор.
- Военные — предназначенные для ведения боевых действий и обороны различных стран мира. К ним можно отнести различные противовоздушные системы, сапёры, военные беспилотники.
Классификация по способу передвижения:
- Подземные — соответственно перемещающиеся под землёй. Это могут быть исследовательские дроны.
- Подводные — перемещающиеся под водой. Это могут мыть подводный батискаф или торпеда.
- Надводные — перемещающиеся над водой. Это могут быть лодки или катера.
- Наземные — передвигающиеся по суше. Это самоходные машины на гусеничном или колёсном ходу. Некоторые модели перемещаются при помощи механических ног.
- Летательные — перемещающиеся по воздуху над землёй. Это так называемые беспилотники и квадрокоптеры.
В этой статье мы классифицировали роботов по разным признакам и сформировали понимание какие бывают роботы.
erabot.ru
Роботы в промышленности — их типы и разновидности / Top 3D Shop corporate blog / Habr

Что это?
Это статья об индустриальном применении робототехники. Применение роботов в промышленности началось, по историческим меркам, не так давно — чуть больше, чем полвека назад, но сейчас уже мало какое производство можно представить себе без автоматических линий, без стальных манипуляторов и зорких стеклянных зрачков роботов — эти железные ребята прочно вошли в большинство производственных процессов и уходить не собираются.

Несмотря на такое обширное, почти повсеместное распространение роботов, лишь специалисты в полной мере представляют себе весь спектр их возможностей. В этой статье мы приоткроем дверь в мир промышленной робототехники для широкого круга читателей: опишем некоторые разновидности производственных роботов и сферы их применения. Нельзя объять необъятное в одной статье, но, если читателям будет интересно, мы обязательно продолжим.
Так какие они бывают — роботы?
Есть несколько классификаций промышленных роботов: по типу управления, по степени мобильности, по области применения и специфике совершаемых операций.
По типу управления:
Управляемые роботы: требуют, чтобы каждым их движением управлял оператор. В силу узости областей применения распространены мало. Да и не совсем роботы.
Автоматы и полуавтономные роботы: действуют строго по заданной программе, зачастую не имеют сенсоров и не способны корректировать свои действия, не могут обойтись без участия рабочего.
Автономные: могут совершать запрограммированный цикл действий без участия человека, согласно заданным алгоритмам и корректируя свои действия по мере необходимости. Такие роботы способны полностью перекрыть поле деятельности на своем участке конвейера, без привлечения живой рабсилы.
По функциям и сфере применения:
Роботы разделяются по назначению и исполняемым функциям, вот лишь некоторые из них: промышленные роботы бывают универсальные, сварочные, машиностроительные, режущие, комплектовочные, сборочные, упаковочные, складские, малярные.
Это далеко не полный перечень: количество всевозможных вариантов постоянно растет и все перечислить невозможно в рамках одной статьи. Можно лишь с уверенностью сказать о том, что вряд ли найдется такая область человеческой деятельности, где роботы не смогли бы сделать труд человека более творческим, взяв всю монотонную и опасную часть работы на себя.
Другие методы классификации
У каждой энциклопедии, каждого справочника и каждого производителя своя классификация и типология роботов. Что и не удивительно — зачастую она определяется сугубо специфическими нуждами и частным подходом того, кто её составляет.
Помешает ли это нам рассмотреть некоторые образцы и понять — что же они умеют? Нет конечно. Поехали.
Рассмотрим образцы
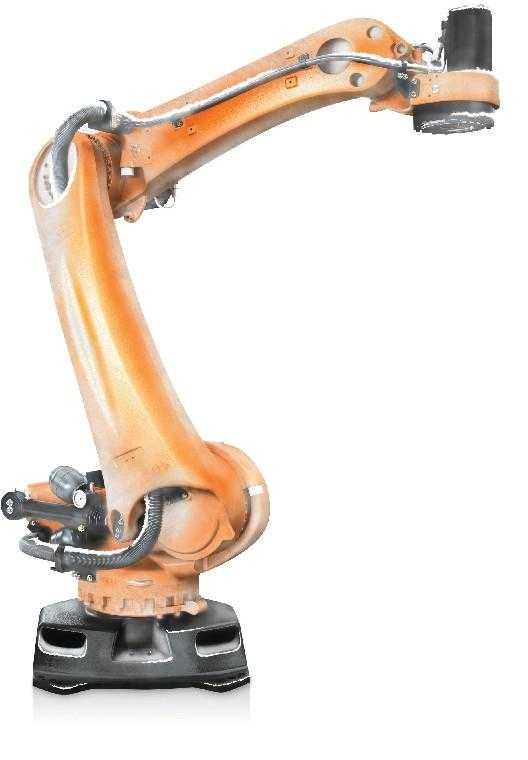
KUKA KR QUANTEC PA Arctic

KUKA KR QUANTEC PA — один из лучших роботов-палетоукладчиков на рынке. KUKA KR QUANTEC PA Arctic — его модификация, робот функционирующий при экстремально низких температурах. Он создан для работы преимущественно в морозильных камерах, при температурах до -30 °C. Электронные и механические части аппарата не нуждаются в защите от мороза, снега, инея, а также не выделяют излишнего тепла. Радиус действия манипулятора модификации Арктик, как и у стандартного KUKA KR QUANTEC PA, составляет 3195 мм, а полезная нагрузка — до 240 кг. Аппарат идеален для применения в пищевой промышленности и в условиях крайнего севера. Кроме составления штабелей из паллетов, робот может выполнять и другие манипуляции, ведь точность его движений, а точнее говоря — стабильность повторяемости позиционирования, составляет 0,06 мм.
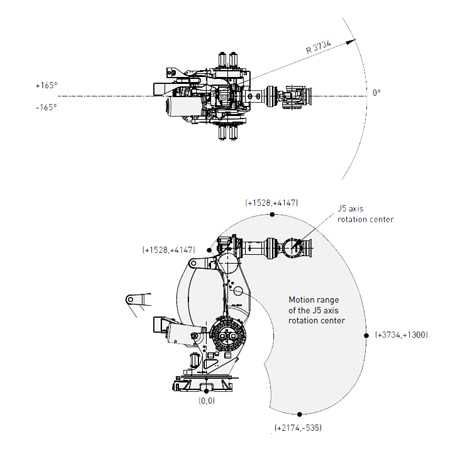
FANUC M-2000iA/1200

FANUC M-2000iA/1200 — пятиосевой грузоподъемный робот поднимающий до 1200 кг и перемещающий этот груз на расстояние до 3,7 м — идеален в качестве погрузчика, так как работает без участия человека, что практически сводит к нулю опасность травматизма. Работает при температурах 0°C — +45 °C. Стабильность повторяемости — 0,03 мм.
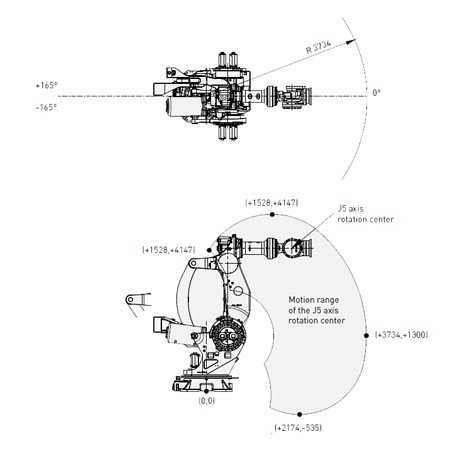
Крайне прочный аппарат.
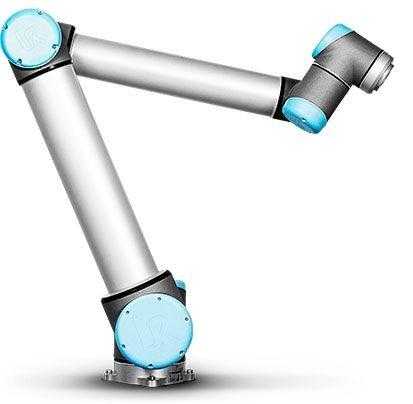
Universal Robots — UR10
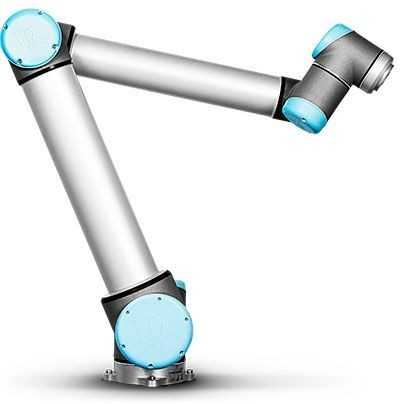
UR10 — самый крупный из манипуляторов Universal Robots и это коллаборативный робот, проще говоря — он создан для работы с другим оборудованием и помощи в работе человеку.
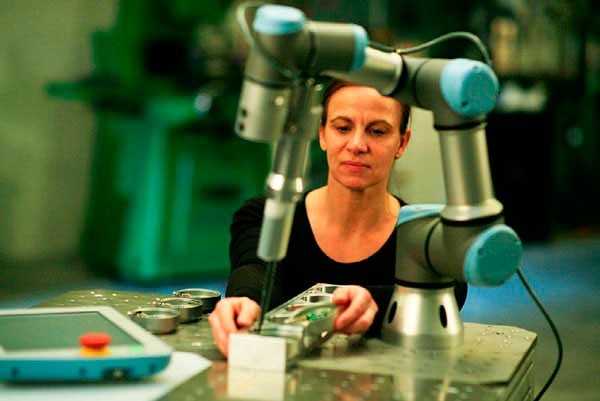
Манипулятор модели UR10 имеет радиус действия 1,3 м и поднимает груз до 10 кг. Его можно использовать с сельскохозяйственным, фармацевтическим, технологическим и многим другим оборудованием. Компактно размещается на рабочем месте человека, чтобы стать ему “третьей рукой”, легко программируется и быстро настраивается.
UR10 умеет завинчивать, клеить, сваривать и паять, производить литьевые и сборочные работы.
Также роботы Universal Robots применены в проекте Voodoo Manufacturing: Project Skywalker компании Medium Corporation — это фабрика 3D-печати, многие операции на которой выполняют именно роботы-манипуляторы. Такие действия, как замена платформ для печати, сбор и складирование готовых изделий больше не требуют неустанного внимания персонала.
Особенно интересны универсальные роботы, так как именно они, в силу своего назначения, снабжены наиболее адаптивными системами управления.
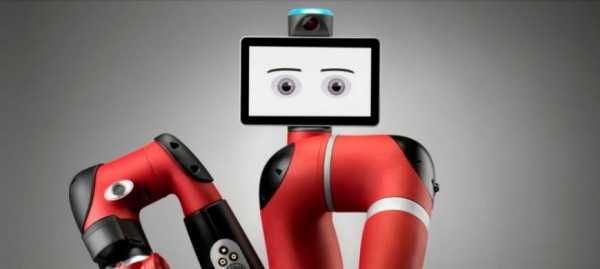
Rethinkrobotics
Это такие роботы, как Baxter и Sawyer производства Rethinkrobotics.
Baxter — многофункциональный робот с двумя манипуляторами и системами обратной связи и самообучения.

Его 7-осевые манипуляторы способны почти на всё, на что способна рука человека, в том числе — имеют обратную связь и могут контролировать прилагаемые усилия. Это, плюс ещё особенности дизайна, делают Бакстера безопасным для живых рабочих — его рабочее место не нуждается в ограждении, да и вообще — места он занимает немного, что здорово экономит пространство в цеху. Пара бакстеров способна успешно работать вместе.

Бакстер интересен еще и тем, что не требует тщательного подробного программирования каждого своего действия — “учить” его можно не только через интуитивно понятное визуальное приложение, но и прямо на рабочем месте — повторяя показанные движения он запоминает их и применяет в дальнейшем.
Sawyer — “младший брат” Бакстера — удивительно компактный и легкий робот-манипулятор, он весит всего 19 килограмм и может быть установлен почти где угодно, не занимая при этом много места.

Точность действий Сойера доходит до 0,1 мм, что позволяет использовать его в сотнях видов комплектовочных, сборочных и других конвейерных работ.
Оба робота легко переобучаются для выполнения новых функций даже без применения традиционного программирования и столь же просто перемещаются с одного рабочего места на другое.
Гибридное производство
Stratasys Infinite-Build 3D Demonstrator
Очень интересным представляется подход компании Stratasys, которая создала промышленный аппарат нового типа — гибрид робота и 3D-принтера.

Конечно, любой 3D-принтер обладает признаками робота, но тут — это совершенно традиционной формы роботизированный манипулятор, имеющий в том числе и функцию FDM-печати. Stratasys Infinite-Build 3D Demonstrator предназначен, прежде всего, для авиационного и космического производства, в котором так важна его способность производить печать на вертикальных поверхностях неограниченной площади, в соответствии с концепцией “infinite-build” — “бесконечное построение”. С работой над проектом связаны такие монстры, как аэрокосмический гигант Boeing и автоконцерн Ford, которые предоставили Stratasys спецификации по необходимым характеристикам получаемых изделий.

Восьмиосевой механизм манипулятора, обилие специально разработанных композитных материалов для печати, традиционно высокое качество изготовления — все говорит нам о том, что у этого аппарата и его потомков большое будущее.
3D Systems — Figure 4
Figure 4 компании 3D Systems — модульная робототехническаяя система для автоматизации стереолитографической 3D-печати, ни больше, ни меньше.

Это целый автоматический комплекс, который способен производить новые изделия каждые несколько минут — в отличие от нескольких часов на обычных SLS-принтерах.

Кроме того, в цикл уже включены и такие этапы, как промывка, отделение поддержек и дозасветка, а не только первичная экспозиция. Все это Figure 4 делает сам, без вмешательства оператора в процесс работы.
Благодаря модульности, на основе Figure 4 можно создать достаточно крупные автоматические линии, используя стандартные компоненты.
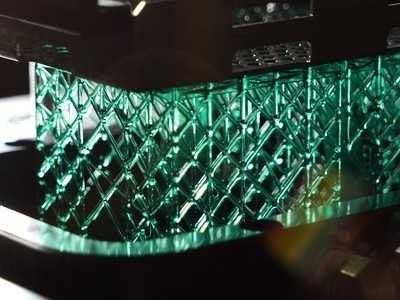
Этот комплекс был представлен общественности в этом году, на выставке The International Dental Show в Кёльне, как и новый 3D-принтер ProJet CJP 260Plus — полноцветный 3D-принтер предназначенный для анатомического моделирования медицинских изделий и быстрого прототипирования любых промышленных образцов.


Принтер также роботизирован — снабжен системой автоматической загрузки, удаления и переработки печатного порошка.
Можно с уверенностью сказать, что комплексный подход к 3D-печати — часть производственной культуры будущего. Он даст радикально новое сочетание скорости, точности, удобства и снижения себестоимости изделий.
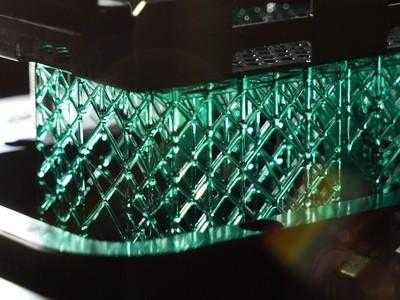
Carbon — Carbon SpeedCell

Carbon SpeedCell — технологическое решение от компании Carbon, которое включает в себя новый 3D-принтер The M2, работающий по технологии CLIP, и финишинговый аппарат для стереолитографических распечаток Smart Part Washer.

CLIP — технология бесслойной стереолитографической печати, обеспечивающая скорость от 25 до 100 раз быстрее обычной SLS и новый уровень качества поверхности.
Система CLIP (Continuous Liquid Interface Production) позволяет получить невозможные ранее формы изделий требующие минимальной постобработки. Точных характеристик аппаратного комплекса производитель пока не предоставил, но сам подход уже радует — это почти готовое решение для любой мастерской, в которой требуется стереолитографическая печать.
DMG MORI — LASERTEC 65 3D

Аппарат сочетающий в себе несколько разных подходов к обработке деталей: это и классический фрезерный станок с программным управлением — пятиосевой и весьма точный, и лазерный режущий инструмент с теми же степенями свободы, и печатающий металлом 3D-принтер с технологией лазерного напыления. Сложно представить себе операцию, которую не смог бы произвести этот станок с металлической деталью. Гибридный подход: фрезеровка заготовки, наплавление недостающих деталей или печать с нуля и чистовая обработка — все операции могут произведены с деталью за один подход, в рамках одной заданной программы, без прерывания технологического цикла. Размер обрабатываемой и/или печатаемой детали составляет до 600 на 400 мм, а вес может быть до 600 кг.
Такое МФУ для работы по металлу уже многое изменило в культуре производства штучных и мелкосерийных изделий, а в ближайшее время подобный подход может распространиться и на серийное производство.
EOS — Additive Manufacturing
Компания EOS создала манипуляторы, которые способны производить различные операции, где требуется захват и перемещение детали. Разработки EOS в этой области основываются на наблюдениях за поведением животных, в частности — этот манипулятор создан по примеру хобота слона.
Такой робот-манипулятор может быть использован во множестве промышленных операций, как то: в транспортировке и упаковке, в перемещении деталей из одной рабочей зоны в другую, например — из 3D-принтера в камеру пост-обработки, чтобы исключить участие человека на этом этапе.
Вот так он устроен:
https://youtu.be/vQ_Zh0bxhs8
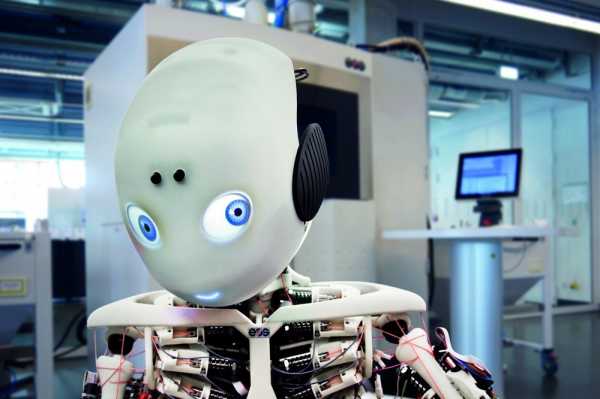
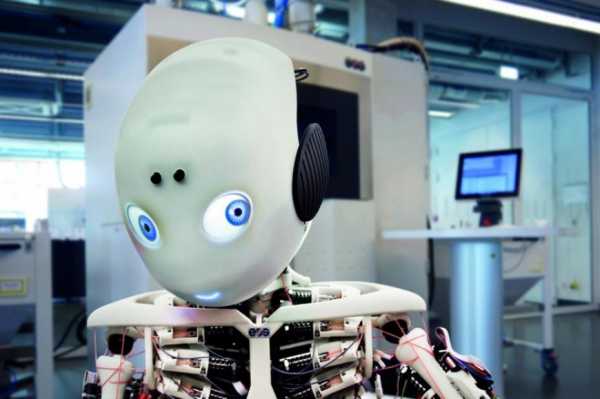
Также компания спонсирует и представляет проект Roboy — это мобильный гуманоидный робот, который способен выполнять любые движения свойственные человеку и служить помощником на производстве.
Concept Laser и Swisslog — M Line Factory

Известный производитель печатающих металлом 3D-принтеров, Concept Laser заключил соглашение с компанией Swisslog, их общий проект — M Line Factory, это система перемещения металлических 3D-печатных деталей между станками Concept Laser с помощью роботов Swisslog.
https://youtu.be/0v4LAbjfJxc
Компании продолжают совершенствование аппаратных комплексов для 3D-печати металлом. Роботизированные составляющие этих машин способны провести деталь через весь цикл — от загрузки проекта в память, до выхода готового изделия на склад, — без необходимости вмешательства оператора.
Additive Industries — The MetalFAB1

Единственная в своем роде установка — единая система для печати, транспортировки из рабочей камеры и хранения готовых деталей. Фактически — готовый цех металлической 3D-печати в одном корпусе.
Существуют роботы, которые способны выполнять функции сварочных и фрезерных станков c программным управлением.
А также такие, которые обслуживают традиционные фрезерные ЧПУ-станки, увеличивая их производительность.
Например, вот так это делает упомянутый выше Sawyer:
https://youtu.be/XU6thj7cQ5c
Выводы
Роботы в современной промышленности везде. Они в любом цеху и в любой области производства. И это нормально: роботы экономят деньги работодателей, а рабочих спасают от вредной и монотонно-отупляющей работы; роботы работают круглосуточно и безостановочно; роботы намного точнее живых рабочих — они не устают, у них не “замыливается глаз”, их сенсоры и системы позиционирования способны сохранять точность до сотых долей миллиметра.
Пока мы видим их еще не везде — многие производственные процессы скрыты от рядового пользователя, да и не особо интересны обычно, — но совсем скоро невозможно будет не замечать того, что подавляющая часть всех материальных благ производится умными машинами.
Хотите больше интересных новостей из мира 3D-технологий?
Подписывайтесь на нас в соц. сетях:
habr.com
Роботы в промышленности – их типы и разновидности

Что это?
Это статья об индустриальном применении робототехники. Применение роботов в промышленности началось, по историческим меркам, не так давно – чуть больше, чем полвека назад, но сейчас уже мало какое производство можно представить себе без автоматических линий, без стальных манипуляторов и зорких стеклянных зрачков роботов – эти железные ребята прочно вошли в большинство производственных процессов и уходить не собираются.

Несмотря на такое обширное, почти повсеместное распространение роботов, лишь специалисты в полной мере представляют себе весь спектр их возможностей. В этой статье мы приоткроем дверь в мир промышленной робототехники для широкого круга читателей: опишем некоторые разновидности производственных роботов и сферы их применения. Нельзя объять необъятное в одной статье, но, если читателям будет интересно, мы обязательно продолжим.
Так какие они бывают – роботы?
Есть несколько классификаций промышленных роботов: по типу управления, по степени мобильности, по области применения и специфике совершаемых операций.
По типу управления:
Управляемые роботы: требуют, чтобы каждым их движением управлял оператор. В силу узости областей применения распространены мало. Да и не совсем роботы.
Автоматы и полуавтономные роботы: действуют строго по заданной программе, зачастую не имеют сенсоров и не способны корректировать свои действия, не могут обойтись без участия рабочего.
Автономные: могут совершать запрограммированный цикл действий без участия человека, согласно заданным алгоритмам и корректируя свои действия по мере необходимости. Такие роботы способны полностью перекрыть поле деятельности на своем участке конвейера, без привлечения живой рабсилы.
По функциям и сфере применения:
Роботы разделяются по назначению и исполняемым функциям, вот лишь некоторые из них: промышленные роботы бывают универсальные, сварочные, машиностроительные, режущие, комплектовочные, сборочные, упаковочные, складские, малярные.
Это далеко не полный перечень: количество всевозможных вариантов постоянно растет и все перечислить невозможно в рамках одной статьи. Можно лишь с уверенностью сказать о том, что вряд ли найдется такая область человеческой деятельности, где роботы не смогли бы сделать труд человека более творческим, взяв всю монотонную и опасную часть работы на себя.
Другие методы классификации
У каждой энциклопедии, каждого справочника и каждого производителя своя классификация и типология роботов. Что и не удивительно – зачастую она определяется сугубо специфическими нуждами и частным подходом того, кто её составляет.
Помешает ли это нам рассмотреть некоторые образцы и понять – что же они умеют? Нет. Начнем.
Рассмотрим образцы
Среди промышленных роботов широко известна продукция таких фирм, как Kuka, Fanuc, Universal Robots, некоторые образцы которых мы рассмотрим чуть ниже.
KUKA KR QUANTEC PA Arctic
KUKA KR QUANTEC PA – один из лучших роботов-палетоукладчиков на рынке. KUKA KR QUANTEC PA Arctic – его модификация, робот функционирующий при экстремально низких температурах. Он создан для работы преимущественно в морозильных камерах, при температурах до -30 °C. Электронные и механические части аппарата не нуждаются в защите от мороза, снега, инея, а также не выделяют излишнего тепла. Радиус действия манипулятора модификации Арктик, как и у стандартного KUKA KR QUANTEC PA, составляет 3195 мм, а полезная нагрузка – до 240 кг. Аппарат идеален для применения в пищевой промышленности и в условиях крайнего севера. Кроме составления штабелей из паллетов, робот может выполнять и другие манипуляции, ведь точность его движений, а точнее говоря – стабильность повторяемости позиционирования, составляет 0,06 мм.
FANUC M-2000iA/1200

FANUC M-2000iA/1200 – пятиосевой грузоподъемный робот поднимающий до 1200 кг и перемещающий этот груз на расстояние до 3,7 м – идеален в качестве погрузчика, так как работает без участия человека, что практически сводит к нулю опасность травматизма. Работает при температурах 0°C – +45 °C. Стабильность повторяемости – 0,03 мм.
Крайне прочный аппарат.
Universal Robots – UR10
UR10 – самый крупный из манипуляторов Universal Robots и это коллаборативный робот, проще говоря – он создан для работы с другим оборудованием и помощи в работе человеку.

Манипулятор модели UR10 имеет радиус действия 1,3 м и поднимает груз до 10 кг. Его можно использовать с сельскохозяйственным, фармацевтическим, технологическим и многим другим оборудованием. Компактно размещается на рабочем месте человека, чтобы стать ему “третьей рукой”, легко программируется и быстро настраивается.
UR10 умеет завинчивать, клеить, сваривать и паять, производить литьевые и сборочные работы.
Также роботы Universal Robots применены в проекте Voodoo Manufacturing: Project Skywalker компании Medium Corporation – это фабрика 3D-печати, многие операции на которой выполняют именно роботы-манипуляторы. Такие действия, как замена платформ для печати, сбор и складирование готовых изделий больше не требуют неустанного внимания персонала.
Особенно интересны универсальные роботы, так как именно они, в силу своего назначения, снабжены наиболее адаптивными системами управления.
Rethinkrobotics
Это такие роботы, как Baxter и Sawyer производства Rethinkrobotics.
Baxter – многофункциональный робот с двумя манипуляторами и системами обратной связи и самообучения.

Его 7-осевые манипуляторы способны почти на всё, на что способна рука человека, в том числе – имеют обратную связь и могут контролировать прилагаемые усилия. Это, плюс ещё особенности дизайна, делают Бакстера безопасным для живых рабочих – его рабочее место не нуждается в ограждении, да и вообще – места он занимает немного, что здорово экономит пространство в цеху. Пара бакстеров способна успешно работать вместе.

Бакстер интересен еще и тем, что не требует тщательного подробного программирования каждого своего действия – “учить” его можно не только через интуитивно понятное визуальное приложение, но и прямо на рабочем месте – повторяя показанные движения он запоминает их и применяет в дальнейшем.
Sawyer – “младший брат” Бакстера – удивительно компактный и легкий робот-манипулятор, Сойер весит всего 19 килограмм и может быть установлен почти где угодно, не занимая при этом много места.
Точность действий Сойера доходит до 0,1 мм, что позволяет использовать его в сотнях видов комплектовочных, сборочных и других конвейерных работ.
Оба робота легко переобучаются для выполнения новых функций даже без применения традиционного программирования и столь же просто перемещаются с одного рабочего места на другое.
Гибридное производство
Stratasys Infinite-Build 3D Demonstrator
Очень интересным представляется подход компании Stratasys, которая создала промышленный аппарат нового типа – гибрид робота и 3D-принтера.

Конечно, любой 3D-принтер обладает признаками робота, но тут – это совершенно традиционной формы роботизированный манипулятор, имеющий в том числе и функцию FDM-печати. Stratasys Infinite-Build 3D Demonstrator предназначен, прежде всего, для авиационного и космического производства, в котором так важна его способность производить печать на вертикальных поверхностях неограниченной площади, в соответствии с концепцией “infinite-build” – “бесконечное построение”. С работой над проектом связаны такие монстры, как аэрокосмический гигант Boeing и автоконцерн Ford, которые предоставили Stratasys спецификации по необходимым характеристикам получаемых изделий.

Восьмиосевой механизм манипулятора, обилие специально разработанных композитных материалов для печати, традиционно высокое качество изготовления – все говорит нам о том, что у этого аппарата и его потомков большое будущее.
3D Systems – Figure 4

Figure 4 компании 3D Systems – модульная робототехническаяя система для автоматизации стереолитографической 3D-печати, ни больше, ни меньше.

Это целый автоматический комплекс, который способен производить новые изделия каждые несколько минут – в отличие от нескольких часов на обычных SLS-принтерах.
Кроме того, в цикл уже включены и такие этапы, как промывка, отделение поддержек и дозасветка, а не только первичная экспозиция. Все это Figure 4 делает сам, без вмешательства оператора в процесс работы.
Благодаря модульности, на основе Figure 4 можно создать достаточно крупные автоматические линии, используя стандартные компоненты.
Этот комплекс был представлен общественности в этом году, на выставке The International Dental Show в Кёльне, как и новый 3D-принтер ProJet CJP 260Plus – полноцветный 3D-принтер предназначенный для анатомического моделирования медицинских изделий и быстрого прототипирования любых промышленных образцов.


Принтер также роботизирован – снабжен системой автоматической загрузки, удаления и переработки печатного порошка.
Можно с уверенностью сказать, что комплексный подход к 3D-печати – часть производственной культуры будущего. Он даст радикально новое сочетание скорости, точности, удобства и снижения себестоимости изделий.
Carbon – Carbon SpeedCell

Carbon SpeedCell – технологическое решение от компании Carbon, которое включает в себя новый 3D-принтер The M2, работающий по технологии CLIP, и финишинговый аппарат для стереолитографических распечаток Smart Part Washer.

CLIP – технология бесслойной стереолитографической печати, обеспечивающая скорость от 25 до 100 раз быстрее обычной SLS и новый уровень качества поверхности.
Система CLIP (Continuous Liquid Interface Production) позволяет получить невозможные ранее формы изделий требующие минимальной постобработки. Точных характеристик аппаратного комплекса производитель пока не предоставил, но сам подход уже радует – это почти готовое решение для любой мастерской, в которой требуется стереолитографическая печать.
DMG MORI – LASERTEC 65 3D

Аппарат сочетающий в себе несколько разных подходов к обработке деталей: это и классический фрезерный станок с программным управлением – пятиосевой и весьма точный, и лазерный режущий инструмент с теми же степенями свободы, и печатающий металлом 3D-принтер с технологией лазерного напыления. Сложно представить себе операцию, которую не смог бы произвести этот станок с металлической деталью. Гибридный подход: фрезеровка заготовки, наплавление недостающих деталей или печать с нуля и чистовая обработка – все операции могут произведены с деталью за один подход, в рамках одной заданной программы, без прерывания технологического цикла. Размер обрабатываемой и/или печатаемой детали составляет до 600 на 400 мм, а вес может быть до 600 кг.
Такое МФУ для работы по металлу уже многое изменило в культуре производства штучных и мелкосерийных изделий, а в ближайшее время подобный подход может распространиться и на серийное производство.
EOS – Additive Manufacturing
Компания EOS создала манипуляторы, которые способны производить различные операции, где требуется захват и перемещение детали. Разработки EOS в этой области основываются на наблюдениях за поведением животных, в частности – этот манипулятор создан по примеру хобота слона.
Такой робот-манипулятор может быть использован во множестве промышленных операций, как то: в транспортировке и упаковке, в перемещении деталей из одной рабочей зоны в другую, например – из 3D-принтера в камеру пост-обработки, чтобы исключить участие человека на этом этапе.
Вот так он устроен:
Также компания спонсирует и представляет проект Roboy – это мобильный гуманоидный робот, который способен выполнять любые движения свойственные человеку и служить помощником на производстве.
Concept Laser и Swisslog – M Line Factory

Известный производитель печатающих металлом 3D-принтеров, Concept Laser заключил соглашение с компанией Swisslog, их общий проект – M Line Factory, это система перемещения металлических 3D-печатных деталей между станками Concept Laser с помощью роботов Swisslog.
Компании продолжают совершенствование аппаратных комплексов для 3D-печати металлом. Роботизированные составляющие этих машин способны провести деталь через весь цикл – от загрузки проекта в память, до выхода готового изделия на склад, – без необходимости вмешательства оператора.
Additive Industries – The MetalFAB1

Единственная в своем роде установка – единая система для печати, транспортировки из рабочей камеры и хранения готовых деталей. Фактически – готовый цех металлической 3D-печати в одном корпусе.
Существуют роботы, которые способны выполнять функции сварочных и фрезерных станков c программным управлением.
А также такие, которые обслуживают традиционные фрезерные ЧПУ-станки, увеличивая их производительность.
Вот так с этим справляется упомянутый выше Sawyer:
Выводы:
Роботы в современной промышленности везде. Они в любом цеху и в любой области производства. И это нормально: роботы экономят деньги работодателей, а рабочих спасают от вредной и монотонно-отупляющей работы; роботы работают круглосуточно и безостановочно; роботы намного точнее живых рабочих – они не устают, у них не “замыливается глаз”, их сенсоры и системы позиционирования способны сохранять точность до сотых долей миллиметра.
Пока мы видим их еще не везде – многие производственные процессы скрыты от рядового пользователя, да и не особо интересны обычно, – но совсем скоро невозможно будет не замечать того, что подавляющая часть всех материальных благ производится умными машинами.
Хотите больше интересных новостей из мира 3D-технологий?
Подписывайтесь на нас в соц. сетях:
Vk
Youtube
Top 3D Shop – Ваш эксперт на рынке 3D-техники
3dtoday.ru
Виды медицинских роботов | Роботы в медицине
Медицинские роботы в России и в Мире

Медицина всегда была сложна, сегодня о ней говорят, как об одной из сложнейших областей, которой овладело человечество. Тем не менее медицинские роботы могут ставить точные диагнозы и проводить лечение, и совсем скоро овладеют они и прочими медицинскими направлениями.
Мы рождены, мы живем, и в конце – мы умираем. Это правда. Однако качество нашей жизни часто коррелирует с нашим здоровьем. Вообще, чем здоровее, тем больше мы можем достичь – таким образом, мы счастливее.
Вот почему здоровье всегда было проблемой. В настоящее время медицина прошла очень долгий путь по сравнению со временем Гиппократа Кос. Теперь люди могут делать очень сложные операции, изобретать лекарства для различных болезней и так далее. Возникает вопрос: может ли медицина идти дальше и каким образом?
Ответ на первую часть вопроса «определенно». Однако ответы на вторую часть могут отличаться. Есть много заметных полей, которые могли бы изменить ход истории болезни, например, стволовые клетки. Тем не менее, я уверен, что поле робототехники и связанных с роботикой областей, таких как медицинская бионика и биомехатроника, будет играть большую роль в медицине в ближайшем будущем.
На самом деле, сейчас в этих областях происходит много интересных вещей. Итак, в этом разделе моего сайта я попытаюсь пролить свет на вопросы о медицинских роботах и областях, связанных с роботикой в медицине, сейчас и в будущем.
Операции с помощью робота
Медицинские роботы, которые могут делать операции, звучат чудесно, не так ли? Все существующие хирургические роботы в этот день на самом деле хитроумно сделаны манипуляторами, контролируемыми компетентными врачами. Есть некоторые проблемы с уровнем искусственного интеллекта, необходимые для самостоятельной работы, но это может быть достигнуто в один прекрасный день.
В настоящее время существует два поля, в которых разрабатываются и тестируются хирургические роботы. Одним из них является телеробота, позволяющая врачу делать операцию на расстоянии. Другое поле – минимально инвазивная хирургия – операция проводится без больших сокращений.
Система хирургии робота da Vinci – один из ярких примеров использования робототехники в хирургических целях. Более тысячи единиц используются во всем мире. Подробнее о роботизированной хирургии в целом.
Роботы новые сотрудники больниц
Больницы – это немного похоже на фабрики. Есть много мирских задач. Например – перенос вещей, перемещение образцов с одного аппарата на другой, очистка. Есть также задачи, требующие некоторой силы. Например, подъем и перемещение пациентов.
Я полагаю, вы поняли, что есть много задач, которые могут выполнять медицинские роботы. В этой области были некоторые разработки – есть роботы, предназначенные для лабораторного использования, есть AGV (Automated Guided Vehicle), предназначенные для использования в больницах.
Насколько я знаю, большинство из них находятся на стадии тестирования. Тем не менее, это, безусловно, выполнимая задача.
Терапевтические роботы
Медицинские роботы, используемые в терапии. Идея этого довольно похожа на терапию с животными, только роботы более предсказуемы. Подробнее о терапевтических роботах.
Биологическое протезирование
Это поле, связанное с роботикой. Результат не может считаться роботом, но включенные в него дисциплины весьма схожи – AI, электроника, механика и многое другое.
Великий сон заключается в том, что в один прекрасный день будут бионные руки и бионные ноги, столь же хорошие и функциональные (или даже лучше), как наши естественные конечности. Недавняя разработка в этой области довольно поразительна. Несколько компаний работают в этой области – Ossur , Otto Bock и Touch Bionics являются одними из тех, кого я знаю.
Применение и использование роботов в медицине в будущем
Возможно, это будет возможно в будущем. Идея состоит в том, чтобы разработать устройства размером до нескольких нанометров, отсюда и название – нано-роботы. Эти маленькие устройства могут затем использоваться разными способами. Например, для исправления сломанной кости или для доставки лекарства в нужное место или для уничтожения раковых клеток.
Возможности ограничены только воображением. К настоящему времени нанороботы находятся в стадии исследований и разработок, поэтому на самом деле это фантазия.
robroy.ru
Бытовые роботы для дома, обзоры, отзывы
Роботы для домашнего хозяйства

Так что же такое домашние бытовые роботы и что они делают? Вы, наверное, слышали что-то о трех D’s – Dull, Dirty и Dangerous. Это обозначение для заданий, которые обычно поручаются роботам. Может быть, хлопоты не очень опасны, но они могут быть довольно грязными и скучными.
Конечно, не все в домашнем хозяйстве может быть сделано роботами, по крайней мере, пока. Тем не менее, есть рабочие места, где приложение робота может быть оправдано на данный момент. Существует два основных критерия, которые должны быть выполнены, когда вы думаете о покупке домашнего робота.
Сначала вы должны выяснить, насколько эффективно робот может выполнять свою работу. Эффективность робота должна быть достаточно высокой для вашего конкретного приложения. Для разных приложений может потребоваться разный уровень эффективности.
Во-вторых, использование робота должно быть экономически оправданным. Может быть, дешевле заплатить кому-то, чтобы делать работу, чем покупать робота. Это больше подходит для коммерческих приложений, таких как чистка магазинов или бассейнов. Конечно, время, которое вы тратите на уборку комнаты, также имеет значение.
Посредством взвешивания по крайней мере этих двух критериев можно найти выгодную цену. Человеческие эмоции также входят в уравнение. Если вы действительно хотите действительно домашнего робота, нет причин, по которым вы должны что-то запрещать себе.
Итак, каковы именно те рабочие места, которые могут выполнять домашние роботы в данный момент? Позвольте рассказать вам.
Роботизированные пылесосы
По моему мнению, роботизированные пылесосы являются наиболее известными бытовыми роботами для широкой публики. Это из-за самых известных из всех пылесосов роботов – iRobot Roomba . Эта компания наверняка знает, как вывести свою продукцию на рынок.
Тем не менее, roomba не единственный. В широком ценовом диапазоне существует множество пылесосов-роботов для различных применений различных компаний. Подробнее о роботизированных вакуумах читайте здесь.
Хотя пылесосом является наиболее известным применением, роботы не ограничены этим. Есть роботы, которые могут подметать полы, такие как iRobot Dirt Dog и роботы, которые могут стирать полы, например, родного соседа roomba – iRobot Scooba.
Мобильные веб-камеры
У кого-то есть что-то, за чем они должны следить. Например, собака – вы уверены, что он не сидит на диване, когда вас нет дома? Ну … Теперь вы можете войти в свой робот наблюдения, используя интернет, и кричать своей собаке, чтобы сойти с кушетки.
У них также может быть больше возможностей – например, играть в mp3 и другие удобные вещи, когда вы дома. Двумя наиболее известными мобильными веб-камерами являются Spykee, созданные Meccano / Erector и Rovio от WowWee.
Очистители щеток
Помните, я говорил о трех D’s? Ну, я думаю, что очистка желоба может поместиться всем трем из них. Вы должны многократно перемещать лестницу, вы можете упасть с них, и работа определенно грязная. Это звучит как идеальная работа для робота для меня.
Хотя обоснование применения робота для этой работы совершенно очевидно, на данный момент я знаю только одно роботизированное решение для очистки водосточных желобов. Это будет робот для чистки водостоков и желобов iRobot Looj 330
Стрижка газона
Эта работа кажется очень похожей на пылесос только на открытом воздухе и в большем масштабе, не так ли? Если есть много пылесосов, то должно быть много роботизированных газонокосилок. Ну, это правильно. Скашивание газонов может быть вторым по величине приложением для роботов в домашнем хозяйстве.
Как я уже сказал, есть много роботов-газонокосилок разных компаний. Для вашего домашнего газона нет столь дорогих решений. И есть также довольно дорогие роботы для более серьезных коммерческих приложений, таких как гольф-клубы и другие спортивные площадки.
Очистка бассейна
Бассейны приятные и предлагают вам много радостных моментов, когда вы можете использовать его для отдыха. Однако очистить их не так приятно. Конечно, вы всегда можете заплатить кому-то, чтобы выполнить эту работу, но роботизированный очиститель бассейна может быть более дешевым решением.
Обычно роботизированные очистители бассейна могут очищать бассейн от пола до ватерлинии, а также фильтровать воду для листьев и других вещей. Таким образом, владелец пула становится почти без проблем.
Персональные роботы
Конечно, вы не можете покупать друзей в магазине. Но есть роботы, которые могут развлекать вас в повседневных обязанностях, которые можно рассматривать как пограничные игрушки.
Возможный диапазон устройств довольно большой. Есть роботы, которые могут следовать за вами и развлекать. Есть роботы, которые могут разбудить вас и убежать и спрятаться от вас – больше похоже на колесные будильники. Существуют также роботы на базе ПК, которые вы можете собирать и программировать по своему усмотрению.
Есть и другие роботы, которые можно рассматривать как бытовые роботы. Многие из них находятся в стадии разработки, и многие из них не могут действительно сделать что-то полезное. Конечно, игрушечные роботы также могут учитываться в этом типе. Однако здесь я сосредотачиваюсь прежде всего на роботах, которые могут заниматься делами и другими полезными вещами для нас.
Теперь у вас должно быть некоторое представление о бытовых роботах. Я продолжу расширять этот раздел, чтобы каждый раздел приводил к статье.
robroy.ru
Роботы. История роботов. Виды роботов. Классификация роботов.
Роботы. История роботов. Виды роботов.
Роботы.
Робот – это автоматическое устройство (машина), предназначенное для выполнения производственных и иных работ, и действий, способное частично или полностью заменить труд человека.
При этом робот может как иметь связь с оператором, получать от него команды (ручное управление), так и действовать автономно, в соответствии с заложенной программой (автоматическое управление).
Внешний вид и конструкция современных роботов могут быть весьма разнообразными, от увеселительных и прикладных и до сугубо производственных. В промышленности широко применяются различные роботы, внешний вид которых (по причинам производственных требований и заложенных характеристик) различается.
В информационных технологиях термин «роботы» используют также применительно к некоторым программам, примерами которых могут служить, например, поисковые роботы.
История роботов.
Идеи создания механических искусственных людей и животных существуют уже в древних мифах. Например, миф о Кадме, который, убив дракона, разбросал его зубы по земле, из зубов дракона выросли солдаты, или другой миф о Пигмалионе, который вдохнул жизнь в созданную им прекрасную статую – Галатею. И таких мифов множество.
Сведения о первых реальных прообразах современных роботов – механических людях с программным автоматическим управлением – относятся к эллинистической эпохе. Тогда на маяке, сооружённом на острове Фарос, установили четыре позолоченные женские фигуры. Днём они ярко светились в лучах солнца, а ночью освещались, так что всегда были хорошо видны издалека. Эти статуи через определённые промежутки времени, поворачивались и отбивали склянки, в ночное же время они издавали трубные звуки, предупреждая мореплавателей о близости берега.
Прообразами роботов были также механические фигуры, созданные арабским учёным и изобретателем Аль-Джазари (1136—1206). Аль-Джазари создал лодку с четырьмя механическими музыкантами, которые играли на бубнах, арфе и флейте.
Чертежи человекоподобного робота создал Леонардо да Винчи примерно в 1495 году. Правда, неизвестно, пробовал ли Леонардо да Винчи построить своего робота.
В XVI-XVIII веках в Западной Европе стало популярным изготовление автоматонов (автоматов) – заводных механизмов, внешне напоминающих человека или животное.
Один из ранних автоматонов находится в коллекции Смитсоновского института – это «испанский монах» (примерно 40 см в высоту), способный передвигаться, ударять себя в грудь правой рукой и кивать головой, периодически он подносит находящийся в его левой руке деревянный крест к губам и целует его. Этот автомат был изготовлен примерно в 1560 году механиком Хуанело Турриано по заказу испанского императора Карла V.
С начала XVIII века в прессе начали появляться сообщения о машинах с «признаками разума», однако в большинстве случаев выяснялось, что это мошенничество. Внутри механизмов прятались живые люди или дрессированные животные.
В 1738 году французский механик и изобретатель Жак де Вокансон создал работающие автоматоны, которые играли на флейте, барабане и других инструметах.. Вокансон также изготовил механических уток, которые умели клевать корм и «испражняться».
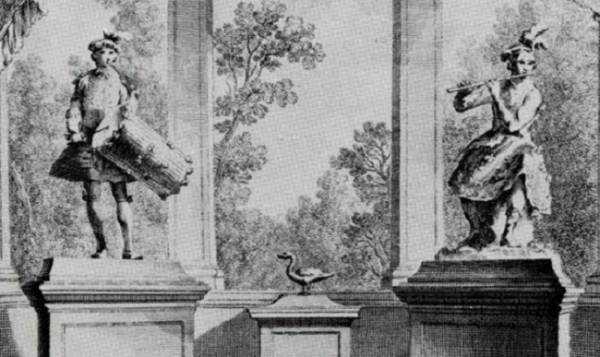
Автоматы Вокансона.
Другим известным мастером по изготовлению автоматонов (механических кукл), жившим в 18-ом веке, был швейцарец Пьер Жаке Дроз.
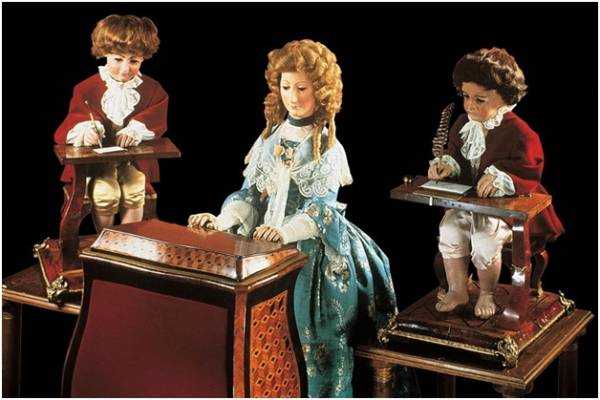
Автоматоны Дроза: Писарь, Девушка музыкант, Художник.
Механические куклы-автоматоны изготавливались часовщиками вплоть до начала 20 столетия, теперь их делают крайне редко. Их главным недостатком является ограниченное время действия и слабость из-за особенностей пружинного заводного механизма. Однако открытие электричества, создание электродвигателей и систем автоматического управления, дало человечеству новые возможности в развитие более совершенных автоматов.
В 1898 году Никола Тесла впервые продемонстрировал самоходную лодку, управляемую дистанционно с помощью радио. Одновременно вместо сложных механических приводов устройства начали обзаводиться более простыми, мощными и миниатюрными электрическими двигателями.
Уже к началу 20 века сформировались все условия, обусловившие создание первых роботов. Электрический ток стал не только источником питания, но и средством получения, передачи и обработки информации. Сложно сказать, когда появился первый робот в современном понимании этого слова. Многие компании и отдельные разработчики тех времен вели работу в области создания подобных машин. В 1920-1930 годы было разработано более 30 механизмов, которые вполне соответствовали требованиям полноценной робототехники.
Слово «робот» появилось в нашем лексиконе благодаря чешскому писателю Карелу Чапеку, оно впервые было использовано в пьесе Чапека «Р. У. Р.» «Россумские универсальные роботы» в 1920 году.
А первым человеком создавшим действующего робота, считают американского инженера Роя Уэнсли, который работал в корпорации Westinghouse Electric Company.
Разработанный Роем Уэнсли в 1928 году механизм под названием «Герберт Телевокс» представлял собой человекоподобную машину, способную открывать двери и окна, отключать духовку, электродвигатели и т. д. Важнейшим отличием этой машины от автоматонов являлось умение отвечать и реагировать на команды, подаваемые ему по телефону. При этом робот был не подключен к линии напрямую – он, подобно человеку, с помощью встроенного микрофона мог слушать команды. Из-за несовершенства технологий того времени эти команды представляли собой не обычную речь, а более простую последовательность гудков, писков, скрежетов и других звуков различной тональности.
Первенство Роя Уэсли оспаривают британец Уильям Ричардс и японец Макото Нисимура.
В 1928 году Уильям Ричардс создал Эрика. Этот механизм мог не только двигать конечностями, но и «осмысленно» отвечать на ряд вопросов, при этом даже умудряясь отпускать шутки.
В 1929 году Макото Нисимура создал свой управляемый по проводам антропоморфный механизм, высотой 3,2 метра, который получил название «Естествоиспытатель». Устройство Нисимура было способно по командам выполнять различные манипуляции руками, в частности писать.
Однако эти и многие другие роботы предназначались в основном для демонстрации научных достижений, а не для практической деятельности. Возникновение полноценной робототехники в производстве или сельском хозяйстве произошло позже, потому что такая автоматика требовала более высокого качественного уровня технологий.
В промышленности первые программируемые механизмы с манипуляторами появились в США в 1930-х годах. Толчком к созданию таких механизмов послужили работы Генри Форда по созданию автоматизированной производственной линии (конвейера) в 1913 году.
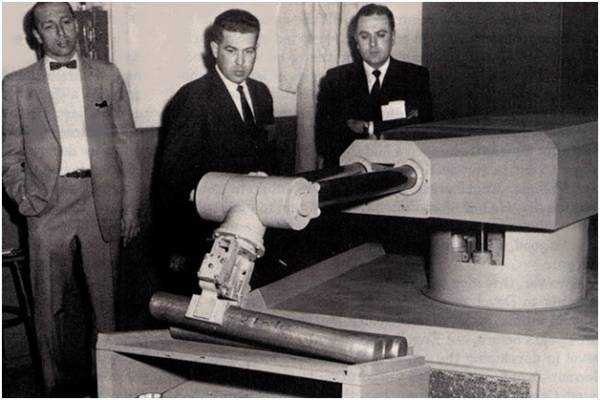
Уже, в 1948 году, в США компанией General Electric был создан первый промышленный робот для работы на атомном реакторе. Его особенностью было наличие обратной связи – оператор мог не только видеть его перемещение в рабочем пространстве, но и чувствовать силу, которую развивал захват манипулятора, что позволяло управлять механизмом более точно.
В середине 1950-х годов американец Джордж Девол основал компанию Unimation («Юнимейшн»), которая занималась выпуском первых серийных промышленных роботов, программируемых с помощью перфокарт.
Уже к середине 1960-х годов в развитых странах насчитывалось несколько десятков компаний, наладивших выпуск подобных машин. Больших успехов в таких разработках достигла Япония – закупив в 1968 году у «Юнимейшн» первые роботы, уже через 10 лет эта страна стала мировым лидером по выпуску собственных аналогов и оснащения ими производств.
Постепенно роботы проникли практически во все сферы деятельности.
Сегодня в промышленности, научных исследованиях, энергетике, медицине, развлечениях, военных действиях, в космосе – современные автоматические или дистанционно контролируемые механизмы используются очень широко.
Развитие роботов идет по нескольким направлениям – улучшение механизмов и приводов, совершенствование алгоритмов, внедрение самообучающихся систем управления (искусственного интеллекта), а также разработка новых интерфейсов «человек-компьютер».
Современная роботизация тесно переплетается с биотехнологиями и кибернетикой, результатом чего является создание кибернетических организмов (киборгов), функциональных бионических протезов, полностью автономных автомобилей, кораблей, космических и летательных аппаратов.
Классификация роботов.
Проводя анализ развития технологий в построении роботов, обычно употребляют термин «поколения» роботов:
– Роботы первого поколения – ранние модели автоматов, которые представляют собой программируемые манипуляторы.
– Роботы второго поколения – это автоматы, которые имеют датчики, собирают и анализируют информацию о среде.
– Роботы третьего поколения – это полностью автономные мобильные устройства, способные принимать решения в условиях значительной неопределённости.
По целевому назначению роботы разделяют на: промышленные, строительные, для сельского хозяйства, для транспортировки, бытовые, военные, охранные, медицинские, исследовательские и т.п.
По типу управления роботы подразделяются на:
– Машины, управляемые с помощью оператора.
Механизмы этого типа являются просто дистанционно управляемыми машинами (простейший пример – детский радиоуправляемый автомобильчик или вертолет).
– Машины полуавтономные.
Полуавтономные роботы могут выполнять самостоятельно часть операций, но в ключевых моментах все же требуется вмешательство человека.
– Машины полностью автономные.
Полностью автономные роботы весь спектр операций выполняют самостоятельно (например, манипуляторы автоматических сборочных линий).
По уровню мобильности роботов разделяют на следующие классы:
– Стационарные роботы.
Стационарные роботы – это те самые манипуляторы, которые все привыкли видеть, например, на автомобильных заводах.
– Мобильные роботы.
Мобильные роботы дополнительно делятся на шагающие, колесные либо на гусеничном ходу.
Преимущества роботов на производстве.
– Роботы могут работать и выполняют сложные производственные операции 24 часа в сутки.
– Роботы не болеют, не нуждаются в обеденном перерыве и отдыхе.
– Роботы не бастуют, не требуют повышения заработной платы и пенсии.
– Роботы менее, чем человек, подвержены вредным воздействиям окружающей среды.
– Роботы производят продукцию в соответствие с заданными параметрами качества.
Современные роботы.
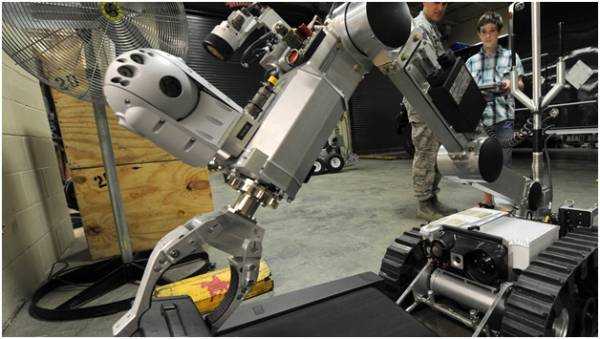
Робот манипулятор на гусеничном ходу.
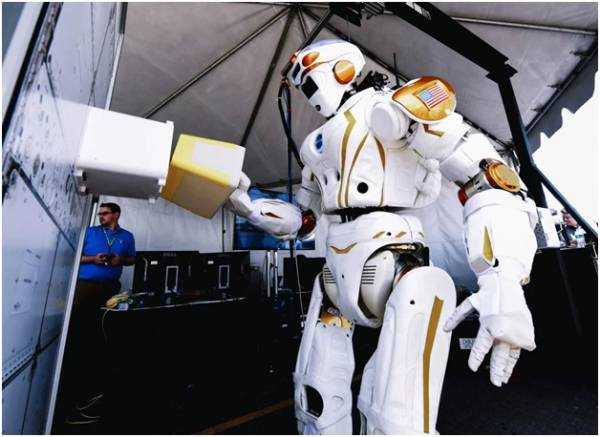
Робот андроид.
Современные боевые роботы.

Американский военный робот.

Российский ударный роботизированный комплекс “Платформа-М”.
Роботы. История роботов. Классификация роботов. Виды роботов.
Женский сайт: Я-самая-красивая.рф (www.i-kiss.ru)
www.i-kiss.ru
