
Магнитометр. Виды и работа. Применение и особенности
Магнитометр – это прибор, который применяется для разведки магнитного поля Земли или поиска скрытых предметов. По принципу действия прибор немного напоминает металлоискатель, который реагирует на металлические поверхности, за тем исключением, что он чувствителен к естественному магнитному полю Земли, а также крупным неметаллическим предметам, имеющим собственное остаточное поле. Устройство нашло свое применение в различных отраслях промышленности и науки, поскольку позволяет фиксировать природные аномалии, а также ускоряет поиски объектов.
Зачем используется магнитометр
Магнитометры реагируют на магнитное поле и выражают показатели его силы в различных физических единицах измерения. В связи с этим существует много типов данных приборов, каждый из которых адаптирован под определенную поисковую цель.
Модификации этих устройств применяются в десятках отраслях науки и промышленности:
- Геология.
- Археология.
- Навигация.
- Сейсмология.
- Военная разведка.
- Геохронология.
В геологии с помощью магнитометра осуществляется поиск полезных ископаемых без необходимости проводить пробное бурение для взятия образцов. Прибор позволяет зафиксировать богатую ископаемыми жилу и принять решение о целесообразности начала добычи в данном районе. Также с помощью данного оборудования можно определить, где находятся подземные источники питьевой воды, как они располагаются и их объем. Благодаря этому можно заблаговременно решить, где осуществить строительство колодца или скважины, чтобы добраться к воде без необходимости максимального углубления.
Магнитометры используются в археологии при раскопках. Они позволяют реагировать на скрытые глубоко под землей фундаменты зданий, статуи и прочие объекты, которые имеют остаточную намагниченность. В первую очередь это обожженный кирпич или камень. Устройство реагирует на скрытые глубоко под землей старинные очаги и печи. С его помощью можно искать объекты во льду или снегу.
Магнитометр также используется в навигации. С его помощью осуществляется определение магнитного поля Земли, в результате чего можно получить данные о направлении движения в случае дезориентации. Такие приборы используют в авиации и морском транспорте. Магнитометры являются обязательным оборудованием на космических станциях и шаттлах.
В сейсмологии магнитометры, которые реагируют на магнитное поле Земли, позволяют предсказывать землетрясение, поскольку при изменении характеристик тектонических плит происходит нарушение привычных показателей поля. Таким способом можно определить свежие подземные трещины, сквозь которые может начаться извержение.
В военной разведке данное оборудование позволяет искать военные объекты, скрытые от обычных радаров. С помощью магнитометра можно выявить лежащую на морском или океанском дне подводную лодку.
В геохронологии по силе остаточной намагниченности можно определить возраст горных пород. Существуют и более точные методы, но с помощью магнитометра это можно сделать за считанные секунды, без необходимости осуществления дорогостоящего анализа.
Разновидности магнитометров по принципу действия
По принципу действия магнитометры разделяют на 3 вида:
- Магнитостатические.
- Индукционные.
- Квантовые.
Каждая разновидность реагирует на стороннее магнитное поле, используя определенный физический принцип. На базе этих трех разновидностей созданы различные узкоспециализированные виды магнитометров, которые являются более точными для измерений в определенных условиях.
Магнитостатические
Несмотря на внешнюю сложность данного прибора, он работает по вполне понятному физическому принципу. Внутри магнитометра находится небольшой постоянный магнит, реагирующий на магнитное поле, с которым контактирует. Магнит находится в подвешенном состоянии на упругой подвеске, позволяющей ему прокручиваться. Она практически не обладает своей жесткостью, поэтому не удерживает его и позволяет прокручиваться без сопротивления. Когда постоянный магнит реагирует с чужеродным полем направление которого или сила не совпадают с его собственным, происходит реакция притяжение или отторжения. В результате подвешенный постоянный магнит начинает проворачиваться, что фиксирует чувствительный датчик. Таким образом осуществляется измерение силы и направления стороннего магнитного поля.
Чувствительность магнитостатического прибора зависит от эталонного магнита, который в него установлен. Также на точность измерения влияет упругость подвески.
Индукционные
Индукционные магнитометры имеют внутри катушку с проволочной обмоткой из токопроводящего материала. Она находится под напряжением от аккумуляторного источника питания. Катушка создает собственное магнитное поле, которое начинает контактировать со сторонними полями, проходящими через ее контур. Чувствительные датчики реагируют на изменения, которые отображаются на катушке в результате такого взаимодействия. Они могут реагировать на вращение или колебания. У более сложных устройств датчики реагируют на изменение магнитной проницаемости сердечника катушки. Независимо от того каким образом фиксируется изменение, прибор отображает показатели внешних магнитных полей и позволяет определять местонахождение объектов, их размер и отдаленность.
Квантовые
Квантовый магнитометр реагирует на магнитный момент электронов, которые двигаются под действием внешних магнитных полей. Это дорогостоящее оборудование, которое применяется для лабораторных исследований, а также сложных поисков. Устройство фиксирует магнитный момент микрочастиц и напряженность измеряемого поля. Данное оборудование позволяет измерить напряженность слабых полей, в том числе тех которые находятся в космическом пространстве. Именно это оборудование применяется в георазведке для поиска глубоких залежей полезных ископаемых.
Отличие между приборами
Магнитометр представляет собой высокотехническое оборудование, которое может отличаться от других подобных приборов не только по физическому принципу реакции на изменение магнитного поля или чувствительности, но и по прочим характеристикам.
Устройства могут отличаться друг от друга по следующим критериям:
- Наличию дисплея.
- Количеству датчиков.
- Наличию звукового индикатора.
- Погрешности измерения.
- Способу индикации.
- Продолжительности непрерывной работы.
- Габаритам и весу.
Что касается количества чувствительных датчиков, то чем их больше, тем более точным будет оборудование. Магнитометр может отображать свои измерения в числовом или графическом выражении. Сказать что лучше сложно, поскольку все зависит от особенностей условий, в которых проводится измерение. В определенных случаях нужно просто получить отображение показателей магнитного поля в цифрах, в то время как иногда больше нужно визуальное определение вектора его завихрений. Оптимальным вариантом являются комбинированные устройства, которые позволяют визуализировать показатели в цифровом и графическом отображении.
Похожие темы:
tehpribory.ru
Принцип работы магнитометра
Магнитометр – измерительный прибор, предназначенный для измерения параметров магнитного поля и магнитных свойств веществ.
Магнитным полем можно назвать проявление электромагнитного поля, обусловленное движущимися заряженными частицами и изменением электрического поля и оказывающего силовое воздействие на движущиеся заряженные частицы или проводники с током.
Основной физической величиной является магнитная индукция В, которая характеризует силовое воздействие магнитного поля в каждой его точке, как по значению, так и по направлению. Магнитная индукция – является величиной векторной, изображается вектором В, имеющим направление, совпадающее с направлением касательной к силовой линии в любой точке поля, так как магнитное поле может быть изображено с помощью линий магнитной индукции, т. е. силовых линий.
Магнитное поле может быть однородным(а, б) и неоднородным (в). В однородном поле векторы магнитной индукции В в любой точке поля одинаковы и направлены в одну сторону. В противном случае поле считается не однородным Магнитометры в зависимости от определяемой величины можно разделить на приборы для измерения конкретного параметра:
- эрстедметры – напряжённости поля;
- инклинаторы и деклинаторы – направления поля;
- градиентометры – градиента поля;
- тесламетры – магнитной индукции;
- веберметры, или флюксметры – магнитного потока;
- коэрцитиметры – коэрцитивной силы;
- мю-метры – магнитной проницаемости;
- каппа-метры – магнитной восприимчивости, магнитного момента.
 Наиболее широко используются приборы для измерения магнитной индукции и напряженности магнитного поля, которые позволяют:
Наиболее широко используются приборы для измерения магнитной индукции и напряженности магнитного поля, которые позволяют:
- Определить соответствия оборудования для проведения магнитопорошкового контроля необходимым техническим характеристикам;
- Контролировать уровня индукционных полей подконтрольных изделий, компонентов, либо устройств при проведении диагностических работ магнитопорошковым методом;
- Контролировать уровня остаточной намагниченности;
- Контролировать уровень индустриальных помех;
- Контролировать уровня магнитных полей.
Измерение магнитной индукции и напряженности магнитного поля в постоянных и переменных полях выполняются с помощью тесламетров с преобразователями Холла. При помещении такого преобразователя в магнитное поле на боковых его гранях генерируется ЭДС.
К достоинствам тесламетров работающих с преобразователем Холла можно отнести простоту конструкции, удобство в эксплуатации, высокие метрологические характеристики. Недостатки: показания прибора зависят от температуры.
Автор: Сергей Погореловnovotest.ua
МАГНИТОМЕТР • Большая российская энциклопедия
МАГНИТО́МЕТР, прибор для измерения характеристик магнитного поля и магнитных свойств объектов и материалов. Некоторые М. имеют спец. названия в зависимости от измеряемой величины: эрстедметры измеряют напряжённость магнитного поля, градиентометры и вариометры – изменения напряжённости в пространстве и времени, инклинаторы и деклинаторы – направление вектора напряжённости, тесламетры – величину магнитной индукции. М. измеряют также следующие характеристики объектов и материалов: магнитную проницаемость и магнитную восприимчивость (мю-метры и каппа-метры), коэрцитивную силу (коэрцитиметры), поток магнитной индукции (веберметры или флюксметры), магнитный момент, кривые намагничивания, потери на гистерезис и др. Часто магнитометрич. датчики используются при косвенных измерениях немагнитных величин.
По принципу действия М. можно разделить на магнитостатические (механические), индукционные, квантовые и др.
Магнитостатические магнитометры
Принцип действия этих М. основан на механич. воздействии магнитного поля на магнит. К таким приборам относятся компас магнитный и буссоль, определяющие направление магнитного поля Земли, кварцевые вариометры, позволяющие регистрировать геомагнитные вариации с точностью 10–3–10–4 А/м и магнитные весы, применяемые в лабораторных условиях для исследования магнитной восприимчивости образцов. В магнитных весах восприимчивость магнитного материала определяется по силе, с которой исследуемый образец, имеющий форму длинного цилиндра, втягивается в поле электромагнита (метод Гуи), или по силе, действующей на образец малого размера, помещённый в неоднородное магнитное поле (метод Фарадея). В методе Гуи требуется бо́льшая масса вещества (1–10 г), а метод Фарадея позволяет работать с миллиграммами вещества и требует более сложного оборудования.
Индукционные магнитометры
Работа этих М. основана на явлении электромагнитной индукции; они регистрируют изменение потока магнитной индукции в измерит. катушке, вызванное разл. причинами. Индукционные М. условно делят на пассивные и активные: в первых эдс в катушке возбуждается изменением во времени внешнего магнитного поля, во вторых – изменениями в самом приборе. Пассивные М. представляют собой длинную цилиндрич. катушку, намотанную на ферромагнитный сердечник и фактически являются антеннами сверхнизкой частоты. Такие М. используются для детектирования ядерных взрывов, связи с подводными лодками, магнитотеллурич. зондирования земной коры, изучения взаимодействия солнечного ветра с магнитосферой Земли и волновых процессов в космич. плазме.
К активным индукционным М. относятся, напр., рок-генератор и феррозондовый М. В рок-генераторе исследуемый образец помещается на спец. площадку, вращающуюся в центре измерит. катушки с частотой 40 Гц. В результате в катушке возникает эдс, величина которой пропорциональна величине намагниченности образца. Для исключения влияния внешнего магнитного поля на результаты измерений катушка (вместе с вращающейся площадкой и образцом) закрыта многослойным пермаллоевым экраном. Рок-генератор применяется при исследованиях магнитных свойств горных пород, напр. при изучении палеомагнетизма.
Феррозондовые М. основаны на периодич. изменении магнитной проницаемости ферромагнетиков при перемагничивании (до насыщения) переменным полем возбуждения. На обмотку возбуждения подаётся переменный ток; при этом в измерит. катушке наводится переменная эдс, чётные гармоники которой пропорциональны продольной компоненте внешнего поля. Простейший феррозондовый датчик состоит из стержневого ферромагнитного сердечника и находящихся на нём обмоток измерения и возбуждения. В наиболее распространённых феррозондовых М. используется тороидальный сердечник с обмоткой возбуждения или два стержневых сердечника с распределёнными по их длине обмотками возбуждения, включёнными последовательно-встречно (т. е. электрически последовательно, но магнитные поля, создаваемые обмотками, имеют противоположное направление). Измерения производятся либо при помощи одной общей сигнальной обмотки, либо с использованием двух обмоток, соединённых так, что нечётные гармонич. составляющие магнитного поля практически компенсируются. Использование тороидального сердечника позволяет одновременно измерять 2–3 взаимно ортогональные компоненты магнитного поля, что уменьшает ошибки в определении направления вектора поля.
Феррозондовые М. применяют для измерения магнитного поля Земли и его вариаций, при аэромагнитных съёмках и разведке полезных ископаемых, в космич. исследованиях, хирургии, в системах контроля качества продукции, в электронных компасах. Чувствительность феррозондового М. достигает 10–4–10–5 А/м.
Квантовые магнитометры
В работе квантовых магнитометров используются квантовые явления: свободная упорядоченная прецессия ядерных (ядерный магнитный резонанс, ЯМР) или электронных (электронный парамагнитный резонанс, ЭПР) магнитных моментов во внешнем магнитном поле, квантовые переходы между магнитными подуровнями атомов, а также квантование магнитного потока в сверхпроводящем контуре. В зависимости от способа создания макроскопич. магнитного момента и метода детектирования сигнала различают: протонные М. (М. свободной прецессии, с динамической и синхронной поляризацией), М. с оптич. накачкой и др.
Датчиком протонного М. служит контейнер с диамагнитной жидкостью, молекулы которой содержат атомы водорода. В качестве такой жидкости могут выступать вода, керосин, бензол, гептан и др. Ампулу с жидкостью помещают в катушку, либо катушку погружают в ёмкость с рабочей жидкостью. Через катушку вначале пропускают ток поляризации, который создаёт магнитное поле, ориентирующее магнитные моменты протонов и намагничивающее жидкость. После отключения тока поляризации магнитные моменты протонов начинают прецессировать вокруг направления измеряемого магнитного поля Низм c частотой ω = γpНизм, где γp – гиромагнитное отношение для протонов. Т. о., измерение частоты прецессии позволяет с высокой точностью определить величину напряжённости магнитного поля.
В работе квантового М. может быть использована также прецессия в магнитном поле магнитных моментов неспаренных электронов парамагнитных атомов. Частота прецессии электронов в сотни раз больше частоты прецессии протонов. Созданы протонные М., в которых ЭПР увеличивает интенсивность ЯМР (эффект Оверхаузера).
Квантовый оптич. М. (М. с оптич. накачкой) часто называют просто квантовым М. Датчиком прибора является стеклянная колба, наполненная парáми щелочного металла (напр., Rb, Cs, K), атомы которого парамагнитны. При пропускании через колбу света с круговой поляризацией и длиной волны, соответствующей переходу атомов металла на один из возбуждённых уровней, атомы заполняют один из магнитных подуровней этого уровня, что приводит к уменьшению резонансного поглощения и рассеяния света. При помещении колбы в переменное магнитное поле с частотой ω = γ
Все описанные квантовые М. применяются для измерения напряжённости слабых магнитных полей, в т. ч. геомагнитного поля в космич. пространстве, а также в геологоразведке.
Принцип действия сверхпроводящих квантовых М. (СКВИД-магнитометров) основан на квантовых эффектах в сверхпроводниках: квантовании магнитного потока в сверхпроводнике и зависимости критич. тока контакта двух сверхпроводников от Низм (см. Джозефсона эффект). Сверхпроводящие М. измеряют сверхслабые магнитные поля и применяются в биофизике, физике твёрдого тела, магнетохимии и др., а также для измерений компонент геомагнитного поля. Чувствительность СКВИД-магнитометров достигает 10–10 A/м.
Другие типы магнитометров
Принцип действия гальваномагнитных М. основан на искривлении траекторий заряженных частиц в магнитном поле. К этой группе М. относятся М., использующие Холла эффект и эффект Гаусса (изменение сопротивления проводника в поперечном магнитном поле). На эффекте Холла основаны также: тесламетры, применяемые для измерения постоянных, переменных и импульсных магнитных полей; флюксметры, используемые для отбраковки постоянных магнитов; коэрцитиметры, применяемые при неразрушающем контроле качества. На основе датчиков Холла создаются градиентометры для исследования магнитных свойств материалов. Чувствительность М. на эффекте Холла обычно находится в диапазоне 10–100 А/м. Эффект Гаусса применяется в магниторезистивных датчиках, используемых в электронных компасах и др. Чувствительность таких тесламетров составляет 0,5–10 А/м.
Существуют также М., принцип действия которых основан на вращении плоскости поляризации света в магнитном поле или поле намагниченного образца, изменении длины намагниченного стержня под действием приложенного поля (магнитострикции) и др. Такие М. применяются в разл. областях техники.
bigenc.ru
Типы магнитометров | Магнитометр
С.Г. Седов, геофизик, канд.геол.-минер. наук
Прежде всего, магнитометры делятся на съёмочные и поисковые. К съёмочным приборам относятся магнитометры, предназначенные для построения геофизических карт магнитного поля, используемых при геологических исследованиях. Поскольку геологические объекты имеют размеры от сотен метров до десятков и сотен километров, то шаг между точками измерения поля меняется от 50 метров до десятков километров. По этой причине дискретное, поточечное измерение магнитного поля при геологических исследованиях не представляет проблемы. Другое дело – археологические и поисковые работы. Здесь поточечное измерение имеет существенные недостатки. Во-первых, теряется вся информация в межточечном пространстве – приходится лишь надеяться, что там ничего не было. Сокращение расстояний между точками измерений, допустим, до 50 см, настолько снижает производительность (темп опоискования площади), что со временем оператор переходит к измерениям через 1-2 метра или к работе в движении. Однако съёмочные пешеходные приборы к работе в движении не приспособлены. Обычно производитель указывает это в Инструкции к прибору. Дело в том, что протонные съёмочные приборы имеют задержку от 2 до 10 сек. от нажатия кнопки “Пуск” до получения на табло цифрового значения поля, вызванную затратами времени на поляризацию жидкости в датчике и на измерение частоты прецессии. Такая инерционность заставляет “проскакивать” аномалию на 2 и более метров, затем возвращаться, и опять же, производя поточечные измерения, отыскивать её центр. Кроме того, работа с протонными магнитометрами в движении резко, в несколько раз, снижает точность измерения поля (также должно быть оговорено Инструкцией) и соответственно снижает достоверность исследований.
Ещё одна особенность съёмочных протонных магнитометров – большой объём датчиков. Следствием этого является неоднородность сильного поля внутри его объёма при приближении к нему железного объекта. В результате магнитометр не может измерить поле – на табло появляются сплошные нули. Это явление всегда наблюдается при выкапывании объекта из земли: невозможно определить, в какую сторону расширять яму и следует ли её углублять, чтобы достичь до этого объекта.
Совершенно очевидно, что поисковые работы требуют оперативного и полного получения информации, и потому поисковый прибор должен обеспечивать непрерывное её поступление оператору. В частности, армейский миноискатель и археологический металлоискатель, которые являются типичным примером поискового прибора, дают именно непрерывную информацию по ходу движения. Аналогичным свойством должен обладать и поисковый магнитометр. К приборам такого типа относится ряд зарубежных магнитометров-градиентометров и магнитометр-градиентометр “Магнум”. Датчики этих поисковых приборов имеют малый объём и не чувствительны к сильным градиентным полям. Поисковые магнитометры также имеют ряд других особенностей, описанных в разделах “Преимущества” и “Магнитометр-градиентометр”.
Магнитометры различаются и по принципу работы – они могут быть протонные, квантовые, феррозондовые, криогенные, индуктивные, на эффекте Холла и др. Однако широко применяются только первые три типа.
Протонные магнитометры
Элементарные частицы материи, в т.ч. атомные ядра, являются носителями магнетизма, т. е. имеют собственные магнитные моменты. Атомное ядро прецессирует (вращается) в магнитном поле вокруг направления поля с частотой. Определяемой соотношением Лармора. Гиромагнитное отношение ядер каждого изотопа (отношение магнитного момента к механическому) является атомной константой, не зависящей от внешних факторов (температура, давление, влажность и т.п.). Поэтому частота прецессии ядра данного изотопа зависит только от напряжённости внешнего магнитного поля. далее >>>
Квантовые магнитометры
Как известно, энергетические уровни атомов паров металлов, находящиеся в магнитном поле, расщепляются на несколько подуровней (эффект Зеемана). Если через сосуд с парами металла (рубидия или цезия) пропускать поляризованный по кругу пучок монохроматического света, произойдёт переход атомов металла с нижнего энергетического уровня на более высокий. далее >>>
Феррозондовые магнитометры
Магниточувствительным элементом феррозондового магнитометра является феррозонд – электрическая катушка с сердечником из магнитомягкого материала, питаемая переменным током. Которая чувствительна к величине и направлению внешнего магнитного поля. Феррозонд имеет другие наименования: датчик магнитного насыщения. Магнитонасыщенный датчик, магнито-модуляционный датчик. В зарубежной литературе феррозонд называется flux-gate – потокопропускающий, потоковоспринимающий. далее >>>
www.magnitometr.com
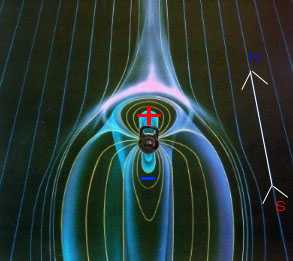
 Физический принцип металлопоиска с помощью магнитометра. Как известно у нашей планеты есть собственное магнитное поле, оно возникает в недрах расплавленного ядра и простирается далеко за пределы атмосферы. То есть магнитное поле есть везде, напряженность его в отдельно взятом локальном месте относительно равномерна и подвержена лишь слабым колебаниям. Если вы сделаете несколько замеров напряженности магнитного поля в одном месте, то значение будет примерно одинаково. Железные предметы вызывают искажение силовых линий магнитного поля земли, и значения его напряженности , сделанные вблизи железных объектов сильно отличаются от естественного фона магнитного поля. Таким образом, принцип металлопоиска с магнитометром состоит в нахождении магнитных аномалий, создаваемых железными предметами. Магнитометр способен обнаружить также неоднородности почвы (ствол колодца, шахта, пещера). Магнитометр не способен обнаружить обьекты из цветного металла, но , если говорить о применении в археологии, то как правило цветной металл всегда соседствует с железом (бочка, кованый сундук, чугунок, железный ящик и тд) либо связан с нарушением структуры почвы (яма, колодец, подвал и тд). В полной мере возможности магнитометра раскрываются при поиске крупных объектов (размером от пистолета до танка), причем чем крупнее объект тем более магнитометр уйдет в отрыв от других металлодетекторов. Значение же мелких предметов (гвозди, шрапнель) нивелируется и они не мешают поиску. Практические глубины – 1.5 -2 метров на пистолет, 15-20 метров на автомобиль. Причем цель захватывается не только непосредственно над датчиком, но и сбоку, что значительно облегчает поиск и снижает вероятность пропуска. В непосредственной близости от предмета показания прибора будут максимальны, либо прибор перегрузится и выдаст соответствующий звуковой сигнал, таким образом вы всегда сможете определить точное местоположение объекта под землей.  Принцип работы основан на ядерной прецессии (изменении ориентации оси вращения) вокруг направления магнитного поля. Ядра водорода (протоны), находящиеся в протоносодержащей жидкости, под влиянием искусственного магнитного поля, созданного соленоидом, ориентированного примерно под прямым углом к земному магнитному полю, поляризуются. Затем поляризующее магнитное поле выключается. Протоны начинают свободно прецессировать вокруг направления земного магнитного поля до тех пор, пока ядерные спины не достигнут нового равновесного состояния. Прецессия протонов индуцирует небольшую ЭДС в приемной катушке. Частота f этого сигнала такая же, как частота прецессии протонов и связана с величиной магнитного поля F соотношением 2pf = gF, где g – гиромагнитное отношение протона, известное с высокой точностью. Измерение частоты сигнала в катушке позволяет определить напряженность магнитного поля. Сигнал с катушки усиливается примерно в 5 миллионов раз, фильтруется от помех , оцифровывается и поступает в микропроцессор для дальнейшей обработки, измерения и визуализации. 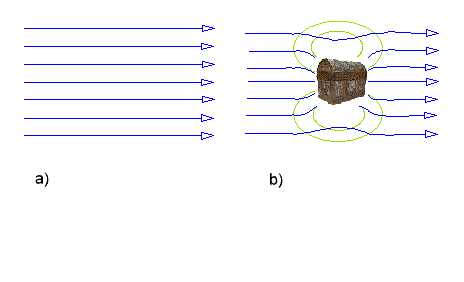 Вы включаете прибор и исследуете участок. На экране отображается значение напряженности магнитного поля. В случае обнаружения магнитной аномалии (например, вызванной скрытым в земле железным предметом) выдается звуковой сигнал. Показания прибора визуализируются на экране в виде графика. Возможна запись данных (напряженность поля, время, GPS координаты места) непрерывно в файл формата EXEL для дальнейшей обработки на персональном компьютере. Мы предлагаем два исполнения приборов: магнитометр и градиентометр. Оба прибора имеют высокие показания чувствительности и разрешающей способности. Градиентометр – более функциональная версия, он имеет все функции магнитометра плюс дополнительные функции. Достоинства магнитометра – меньшая цена, вес, и энергопотребление. Магнитометры по праву считаются дальнобойной артиллерией металлопоиска. Ни один другой физический принцип металлодетекции (VLF, PI и тд) не может сравниться с магнитометрией по глубине обнаружения сокрытых в земле железных объектов, и этому есть несколько объяснений. Все металлодетекторы сначала излучают сигнал, он проникает сквозь толщу земли к обьекту, отражается и путешествует сквозь толщу земли еще раз обратно. Магнитометры же ничего не излучают, а только измеряют уже существующее магнитное поле, так как оно уже есть везде , и под землей тоже. Таким образом с помощью магнитометрии теоретически возможно достижение относительно вдвое больших глубин обнаружения. Но глубина обнаружения зависит также и от параметров магнитометра – его чувствительности и разрешающей способности. Чем меньшее геомагнитное возмущение он сможет зафиксировать, тем дальше он обнаружит предмет. Различные типы магнитометров имеют различные значения разрешающей способности. Протонные магнитометры – неоспоримые лидеры и имеют гораздо большую разрешающую способность чем все другие (феррозондовые, магниторезистивные, холла и тд). Недостаток только один – всилу особенностей метода скорость измерений невелика – примерно одно измерение в секунду. Магнитное поле земли относительно однородно. Ферромагнитные предметы создают возмущение магнитного поля довольно сложной формы.
В общем случае проекция этого возмущения на плоскость земли представляет из себя восьмерку, в центре которой находится ферромагнитный предмет,
на север от предмета напряженность магнитного поля увеличивается а на юг – уменьшается.
Поиск в пешеходном режиме.В пешеходном поисковом режиме целесообразно сканировать местность в направлении север-юг, в этом случае наличие под землей ферромагнитного обьекта можно безошибочно определить по изменению магнитного поля с положительной анамалии на отрицательную. Включите магнитометр, войдите в автоматический режим, на чистом от металла месте нажмите кнопку “баланс”. Двигаясь в направлении север-юг, наблюдайте за показаниями прибора, при приближении к ферромагнитному обьекту показания будут увеличиваться плавно нарастая, как только вы пересекете центр аномалии – показания резко перскочат на отрицательные, и , при дальнейшем удалении от предмета медленно вернутся к естественному магнитному фону. Таким образом центр сокрытого в земле предмета всегда можно определить в направлении восток-запад – по максимальному(или минимальному) значению напряженности магнитного поля,а в направлении север-юг по скачкообразному переключению показаний прибора с плюса на минус (или с минуса на плюс). В цифровом режиме отображения это будет выглядеть примерно так:Составление магнитной карты местности.В случае , если предмет поиска довольно крупный или протяженный, целесообразно составить магнитную карту иссследуемого участка. Размечается участок: Далее на флешкарту записывается серия профилей (M1.CSV, M2.CSV и тд) вдоль каждой из размеченных линий. Шаг сканирования выбирается исходя из размеров искомой аномалии. Записанные таким образом профили обрабатываются программой DEEPGEOTECH Viewer в режиме Matrix. Результат работы программы будет примерно такой: 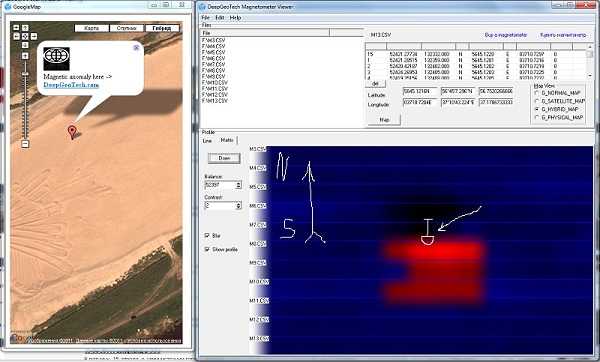 Здесь: черный и красный цвета – магнитная аномалия, голубой – естественный магнитный фон. Ферромагнитный обьект будет расположен примерно в центре магнитной аномалии. Видео по теме:
|
deepgeotech.ru
Протонный магнитометр
Содержание
Введение
Глава 1.
Принцип работы протонного
магнитометра
Глава 2.
Обзор отечественных
магнитометров
Заключение
Используемая
литература
Введение
Ядерно-прецессионный
протонный магнитометр имеет,
на первый взгляд, страшное название.
На самом деле физика
Принцип работы
магнитометра основан на
Частота Лармор прецессии независима
от ориентации протона и зависит только
от величины внешнего поля.
Частота прецессии определяется по формуле:
F = В/23.4875, где F – частота в Гц, В – величина
индукции внешнего магнитного поля в нТл.
Чтобы измерить величину местной магнитной
индукции с точностью до одного нТл, необходимо
измерить частоту с точностью до 0.0426 Гц.
Магнитное поле Земли имеет величину индукции
примерно 50 мкТл. Наименьшее значение
магнитной индукции на экваторе, наибольшее
на полюсах. Кроме этого, величина магнитной
индукции земного поля зависит от солнечной
активности, времени суток, залежей полезных
ископаемых и многих других факторов.
В датчике ядерно-
Вызванное напряжение протонной прецессии
имеет порядок микровольт.
Поскольку прецессия протонов будет впоследствии
рандомизироваться тепловыми столкновениями
протонов, то полезный сигнал уменьшается
по экспоненте со временем. Время зависит
от специфики используемого вещества
и может изменятся от одной до нескольких
секунд.
Для другого измерения процесс необходимо
повторить.
Наиболее простая
конфигурация датчика –
Магнитометристы,
работавшие с протонным
Большинство протонных магнитометров
имеют соленоидальные датчики. Эта конфигурация
имеет одно преимущество и несколько больших
недостатков.
Преимущество – датчик легко изготовить.
Первый недостаток – датчик является чувствительным
к внешним переменным магнитным полям.
Поле промышленной частоты 50 Гц вызовет
напряжение, которое может быть намного
больше, чем полезное напряжение прецессии.
Во-вторых, соленоидальный датчик чувствителен
к ориентации в магнитном поле Земли. Если
поле поляризации (по оси соленоида), сонаправлено
с измеряемым внешним полем, то полезное
напряжение будет равно нулю. Это означает,
что пользователь должен всегда убедиться
в правильной ориентации соленоида для
корректного измерения.
Для устранения этих недостатков применяют
тороидальные датчики.
Первое – тороидальная катушка – не чувствительна
к внешним переменным ‘шумовым’ магнитным
полям.
Во-вторых, тороидальная конфигурация
почти не чувствительна к ориентации.
Если внешнее измеряемое магнитное поле
ориентируется в наименее чувствительном
направлении (в плоскости тороида), вызванное
полезное напряжение только в два раза
меньше, чем полезное напряжение при самой
чувствительной ориентации (внешнее поле
направлено по оси тороида).
Сигнал никогда не уменьшается до нуля.
Единственное неудобство тороида – это
трудоемкая намотка.
Глава1. Принцип работы протонного магнитометра
Протонный магнитометр работает в двух основных режимах:
- первый из них – режим поляризации, при котором рабочее вещество подвергается воздействию сильного магнитного поля, чтобы намагнитить (то есть, выстроить в линию) протоны.
- Второй режим – фактическое измерение частоты прецессии для определения величины магнитного поля.
В обоих режимах
используется та же самая
Основная величина, которая будет измерена
– частота прецессии протонов. Это переменное
напряжение диапазона звуковых частот
на выходе датчика. Это напряжение составляет
от долей до единиц микровольт и должно
быть усилено. Очевидно, что усилитель
должен иметь низко шумовой фактор.
Частота прецессии
должна быть измерена
Чем точнее измерена частота прецессии,
тем точнее будет определена величина
магнитного поля.
Так как сигнал
распадается по экспоненте со
временем – период измерения ограничен.
При уменьшении амплитуды сигнала отношение
сигнал-шум ухудшается.
При постройке магнитометра необходимо
учитывать все эти факторы.
В магнитометре, мы хотим измерить абсолютную
величину магнитного поля.
При использовании современных микроконтроллеров
преобразование частоты прецессии протонов
в величину индукции магнитного поля по
вышеприведенной формуле легко решается.
Блок-схему одного из возможных вариантов реализации квантового протонного магнитометра можно представить следующим образом:
Рассмотрим принцип
работы данного устройства.
Цикл одного измерения магнитного поля
состоит из следующих этапов:
- Поляризация.
С Модуля микроконтроллера формируется Управляющий импульс 1 и приводит к замыканию Коммутатора К1 (далее просто К1), при этом Коммутатор К2 (далее К2) находится в разомкнутом состоянии. Через Датчик начинает протекать постоянный ток поляризации. Величина этого тока зависит от активного сопротивления датчика и составляет обычно от нескольких сот мА до нескольких А. Под воздействием созданного этим током электромагнитного поля в рабочем веществе Датчика (Подробнее строение Датчика рассмотрим позднее, а в общем он представляет собой катушку индуктивности соленоидального, тороидального или смешанного типа, в качестве “сердечника” которой выступает “рабочее вещество” – жидкость или газ, содержащее свободные протоны; часто используют дистиллированную воду, бензин, керосин или, что может быть особенно полезно в полевых условиях, спирт 🙂 свободные протоны “выстраиваются” согласно линиям напряженности поля.
- Подавление
переходного процесса.
К1 размыкается, К2, как и ранее находится в разомкнутом состоянии. Этот этап при ряде условий можно было бы и не выделять отдельно, но индуктивность Датчика может быть достаточно высокой (от нескольких десятков до нескольких сотен мГн) и момент размыкания К1 может представлять опасность для высокочувствительного Малошумящего входного усилителя.
- Усиление сигнала с Датчика, фильтрация, преобразование в “удобочитаемую” для микроконтроллера форму, измерение частоты и перевод в нТл с последующим отображением на дисплее.
- К1 разомкнут, К2 замкнут. При отключении поляризационного тока свободные протоны начинают перестраиваться под воздействием магнитного поля Земли и при этом совершают колебательные движения, вызывая появление на датчике напряжения с частотой, прямо пропорциональной напряженности магнитного поля. Коэффициент пропорциональности равен 23,4872 нТл/Гц, т.е. при возникновении на Датчике напряжения с частотой 2000 Гц напряженность магнитного поля равна 2000*23,4872=46974 нТл.
Сложность заключается
в том, что величина
Для получения приемлемого соотношения
сигнал/шум мы должны за время около 0,3-0,4с,
измерить частоту напряжения (грубо для
наших целей лежащую в диапазоне 1000-3000Гц)
с точностью до сотых долей Гц (разрешение
прибора при этом составит примерно 1 нТл).
Методы расчета и построения датчика,
а также возможный метод измерения частоты
с заданной точностью мы рассмотрим далее.
Фильтр нужен для подавления шумовых составляющих
сигнала, лежащих вне рабочего диапазона,
Компаратор или триггер Шмита – для увеличения
крутизны фронтов сигнала и преобразования
его в “удобочитаемую” для микроконтроллера
форму (можно, конечно, использовать для
этих целей и встроенный компаратор микроконтроллера).
Для
наглядности рассмотрим
графики:
Как видим, цикл одного измерения состоит из двух взаимосвязанных импульсов:
- первого для управления поляризацией, а затем, через интервал времени t задержки , служащий для подавления переходного процесса в Датчике
- второго, подключающего схемы усиления, обработки и измерения входного сигнала. Продолжение следует.
Рассмотрим более
подробно отдельные моменты проектирования
устройства в целом.
Поляризация.
Упрощенный вариант
схемы поляризации может иметь
следующий вид (Рис 1): В данном
варианте подача напряжения
Этих недостатков лишена схема на Рис. 2, где функции реле выполняют транзисторы VT1 и VT2, при помощи VT2 также осуществляется задержка подключения усилителя на время, необходимое для полного подавления переходного процесса в датчике. Но и эта схема неприменима из-за того, что транзисторы являются хоть и достаточно качественными ключами, но не идеальными. В закрытом состоянии через VT1 и датчик протекает ток утечки сток-исток порядка нескольких мкА, что в нашем случае достаточно много (т. к. амплитуда измеряемого нами сигнала с датчика находится в диапазоне от десятых долей мкВ до 1-2 мкВ при нерезонансном подключении датчика).
Схема на Рис. 3 представляет собой “симбиоз” первых двух и лишена присущих им недостатков. Механизм ее работы таков: до начала поляризации транзистор VT1 закрыт, VT2 открыт, контакты реле находятся в показанном на схеме положении; при поляризации VT1 открывается и через датчик протекает ток; по окончании поляризации VT1 закрывается и через несколько мс (время, достаточное для завершения переходного процесса). Реле подключает датчик к усилителю и запирается VT2; после проведения измерения контакты реле возвращаются в исходное положение, и отпирается VT2. Подобная реализация предотвращает протекание тока утечки сток-исток VT1 через датчик в момент измерения, исключает коммутацию больших токов при помощи реле и может быть использована на практике (в качестве реле можно использовать, например, РЭС 55 или аналогичные). Для желающих избавиться в схеме от такого “узкого” места, как реле, можно рекомендовать вариант решения, предложенный J.A. Koehler-ом (именно его работы позволили заняться отработкой принципов построения протонного магнитометра, т. к. содержат большое количество необходимого теоретического материала и доступны в сети.
На Рис. 4 показана схема, не использующая реле в качестве коммутирующего элемента. Этого удалось добиться путем добавления нескольких транзисторов и некоторым усложнением управляющей схемы (при использовании микроконтроллера управление реализуемо программно, если же микроконтроллер не используется, управляющие импульсы удобно формировать при помощи таймеров типа 555). Рассмотрим принцип работы этой схемы при помощи временных диаграмм, приведенных ниже. До начала поляризации все транзисторы, кроме VT7, закрыты. VT7 открыт – вход усилителя подключен к “земле”. Для начала поляризации управляющей схемой формируются Упр. импульс 1 (примерно 0,7 с для керосина) и Вспом. импульс 1, что приводит к отпиранию VT1, VT2, VT3 и VT4, через датчик протекает ток поляризации и подключается схема подавления переходного процесса на VT4 R2. VT7, как и ранее, открыт, остальные закрыты. Как видно из графиков, Упр. импульс 1 и Вспом. импульс 1 начинают формироваться одновременно, но Вспом. импульс 1 имеет большую длительность (как правило, на 10-20 мс, в зависимости от тока поляризации и индуктивности датчика) и за это дополнительное время происходит подавление импульса самоиндукции (на R2 и защитных диодах транзисторов). Сразу же после окончания Вспом. импульс 1 формируется Вспом. импульс 2 (длительность примерно 0,2-0,5 с , к критериям выбора вернемся позднее) и отпирается VT5, VT1-VT4 и VT6 закрыты , VT7, как и ранее, открыт. Собственно, в использовании VT5 и заключается “изюминка” этой схемы. Если при поляризации “корпусным” являлся нижний по схеме вывод датчика, то в процессе измерения частоты прецессии на “корпус” подключается верхний вывод. На снимаемый с датчика сигнал это не влияет, но львиная доля тока утечки СИ VT2 (от которого, собственно, мы и стремимся избавиться) протекает по цепи +U – CИ VT2 – СИ VT5 – “корпус”, минуя датчик. Через 5-10 мс после начала Вспом. импульс 2 формируется Упр. импульс 2, открывается VT6 и запирается VT7. Сигнал с датчика поступает на вход усилителя. По окончании Вспом. импульс 2 оканчивается и Упр. импульс 2 и схема возвращается в исходное состояние.
www.stud24.ru
КВАНТОВЫЙ МАГНИТОМЕТР • Большая российская энциклопедия
В книжной версии
Том 13. Москва, 2009, стр. 474
Скопировать библиографическую ссылку:
Авторы: Е. Б. Александров
КВА́НТОВЫЙ МАГНИТО́МЕТР, прибор для определения магнитной индукции, основанный на измерении энергии (частоты) квантового перехода парамагнитной частицы между двумя состояниями, различающимися квантованными (дискретными) значениями проекции углового момента на вектор магнитной индукции. Энергия связана с магнитной индукцией поля через фундам. константы и константы, характеризующие вещества, поэтому показания К. м. не нуждаются в калибровке и имеют абсолютный характер. Это в корне отличает К. м. от всех др. магнитометров, в т. ч. от магнитометров на основе квантовых сверхпроводящих интерферометров – СКВИД-магнитометров.
Схема протонного магнитометра.
Существует много типов К. м. Наиболее известен протонный магнитометр (рис.), основанный на измерении частоты свободной прецессии ядерных спинов протонов во внешнем магнитном поле. Рабочей средой протонного магнитометра служит жидкость, содержащая протоны, чаще всего вода. При отсутствии магнитного поля магнитные моменты отд. протонов ориентированы хаотично. Перед началом измерения кювету с водой помещают в сильное вспомогательное магнитное поле, создаваемое катушкой с током и направленное перпендикулярно вектору индукции измеряемого магнитного поля $\boldsymbol B$. Под действием вспомогательного магнитного поля, оказывающего ориентирующее (поляризующее) действие на магнитные моменты протонов, в воде возникает макроскопич. магнитный момент. После выключения поляризующего поля этот момент начинает прецессировать вокруг направления измеряемого магнитного поля. Частота прецессии ω пропорциональна величине магнитной индукции B измеряемого поля: ω=γB, где γ – гиромагнитное отношение, равное для протона (в воде) ≈ 42,57602 МГц/Тл. Частота измеряется по сигналу индукции, которую наводит прецессирующая намагниченность в катушках, окружающих кювету с водой. Сигнал представляет собой экспоненциально затухающую синусоиду. Время затухания составляет ок. 1 с, что позволяет насчитать тысячи периодов осцилляций в земном магнитном поле и обеспечить чувствительность измерения вплоть до долей нТл. Протонный прецессионный магнитометр, построенный впервые в сер. 20 в., до сих пор служит эталонным средством измерения магнитной индукции и применяется гл. обр. в геомагнитных обсерваториях.
Существует много модификаций этого прибора, из которых следует отметить К. м., использующий эффект Оверхаузера (см. Ядерный магнитный резонанс) для поляризации ядерных спинов. В этих приборах вместо протонов используются парамагнитные радикалы со сверхтонкой структурой осн. состояния. В условиях электронного парамагнитного резонанса в микроволновой области удаётся достичь высокого уровня ядерной поляризации без применения сильного внешнего поляризующего поля. Это позволяет перейти от импульсного режима измерения индукции к непрерывному и заметно повысить чувствительность.
В 1960-х гг. появились К. м., использующие в качестве рабочей среды электронные парамагнетики, преимуществом которых является много бóльшая (на 2–3 порядка) величина гиромагнитного отношения γ. При прочих равных условиях это приводит к повышению чувствительности магнитометра и увеличению скорости измерения, что важно для ряда приложений. Однако преимущество высокого гиромагнитного отношения у электронных парамагнетиков удаётся реализовать, если только времена релаксации намагниченности электронных и ядерных парамагнетиков сопоставимы. Это возможно для электронных парамагнетиков в виде разреженных атомарных газов. Наилучшие результаты достигнуты для атомов в основном S состоянии, таких как атомы щелочных металлов и атомы гелия в метастабильном 23S1 состоянии (ортогелий). В К. м. с электронными парамагнетиками используется др. принцип поляризации – оптич. накачка. Этот процесс основан на селективном оптич. возбуждении атомов в состояниях с определённым значением углового момента или его проекции. Оптич. накачка позволяет не только достигать предельно высокой поляризации атомов, но и контролировать её по степени поглощения атомами света накачки. Сочетание электронных парамагнетиков с принципом оптич. накачки дало возможность создать К. м., превосходящие протонные магнитометры по всем осн. показателям, таким как точность, разрешающая способность и быстродействие.
К. м. с оптич. накачкой перекрывают широчайший диапазон значений магнитной индукции – от нуля до единиц Тл. Чувствительность таких К. м. не зависит от величины напряжённости измеряемого поля (в отличие от протонных магнитометров, чувствительность которых линейно уменьшается с уменьшением напряжённости поля). Наиболее широко они применяются для измерения геомагнитных полей, т. е. в области магнитной индукции от 20 до 80 мкТл. Популярными рабочими веществами для К. м. с оптич. накачкой являются пары́ щелочных металлов – цезия и калия, а также ортогелий. Наиболее простые и дешёвые цезиевые магнитометры обладают высокой разрешающей способностью (порядка 1 пТл в полосе 1 Гц), высоким быстродействием (до 100 измерений в 1 с), но характеризуются значительными систематич. погрешностями – порядка 1 нТл и более. Калиевые К. м. с оптич. накачкой обладают наиболее высокой точностью порядка 10 пТл при разрешающей способности порядка 0,1 пТл· Гц–1/2. Гелиевые магнитометры имеют близкие характеристики по точности и разрешению, но только в условиях лазерной оптич. накачки (К. м. на парáх щелочных металлов хорошо работают при накачке от простых газоразрядных ламп). При этом гелиевые К. м. имеют большую скорость реакции и не нуждаются в термостабилизации рабочего объёма прибора.
bigenc.ru
