
Статья 2. Расчет импульсного источника питания на UC3842.
Статья 2. Расчет импульсного источника питания на UC3842.
Продолжаем тему Статья 1. Импульсный источник питания на UC3842.
В этой статье попытаемся рассчитать элементы импульсного источника питания на UC3842 под необходимые параметры. Для начала определимся зачем он нам нужен.
А нужен мне импульсный источник питания в лабораторно – испытательных целях. В будущем, этот ИИП будет немного видоизменен и дополнен возможностью регулировки выходного напряжения и силы тока, а пока рассчитаем ИИП на UC3842 под максимально возможные необходимые параметры.
Первое условие – нужное напряжение – 32 В (больше использовать не приходилось, так, что буду наедятся, что этого хватит). Второе условие – сила тока – естественно, чем больше, тем лучше. Однако будем исходить из реалий: сварочный аппарат мне не нужен, а значит посмотрим, что имеется у меня из деталей.
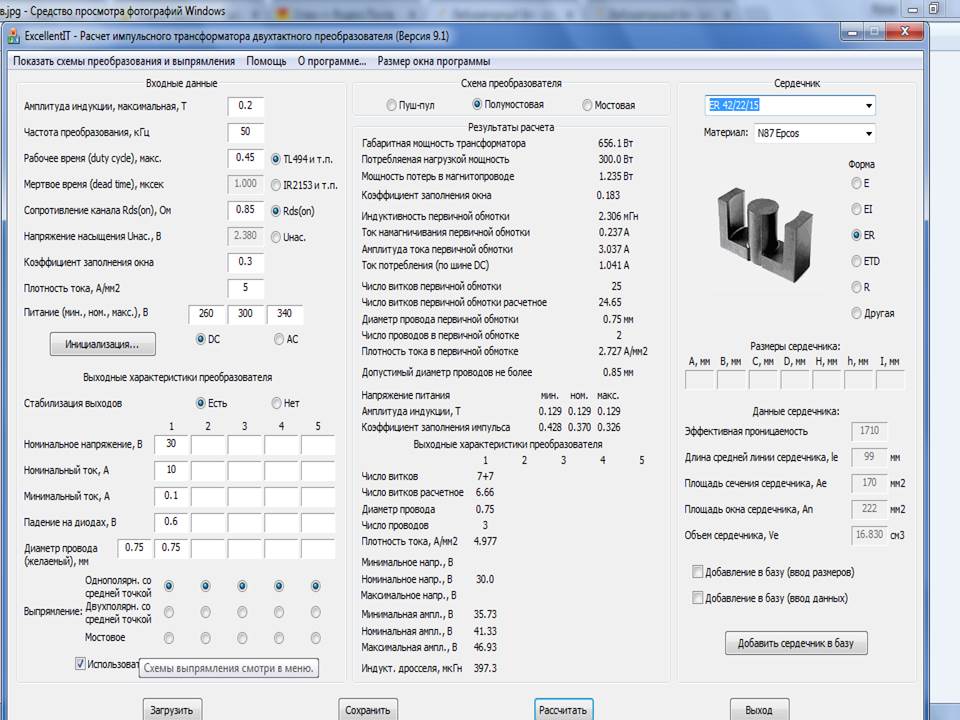
Самым важным элементом во всей схеме ИИП на UC3842 является трансформатор. Для его расчета воспользуемся программой Flyback. Сразу приведу скрин программы с уже заполненными параметрами, а после разъясню, что откуда брать.
Основные параметры, которые необходимо ввести:
Питание. Устанавливаем точку напротив AC, и вводим значения переменного тока сети. Если установить точку напротив DС, необходимо будет ввести параметры уже выпрямленного тока после диодного моста.
Частота преобразования. Выбрана 60 кГц. Чем больше частота преобразования, тем больше энергии можно передать через один и тот же трансформатор, но нужно помнить, что и ключ устанавливать нужно мощнее.
Максимально допустимое напряжение на ключе – 500 В, cопротивление канала Rds – 0,85 Ом. Эти значения берем из датасшита на имеющийся у вас полевой транзистор. Вот пример для транзистора IRF840:
Не забываем, что в датасшите напряжение и сила тока указаны максимальные, к которым лучше не приближаться!
Идем дальше. Пороговое напряжение датчика тока – установлено 1 В. Это такое напряжение, формируемое на 3 выводе драйвера UC3842, при превышении которого он закрывает транзистор. Поступает оно с датчика тока R13.
Теперь задаем выходные параметры. Напряжение мне нужно 32 В, однако, я указал две обмотки по 16 В, чтобы после сформировать на выходе двух полярное питание со средней точкой (может когда сгодится). Там же указываем нужный ток Iном. У меня Iном = 5 А, чуть позже объясню почему именно такое значение выбрал.
Там же указываем нужный ток Iном. У меня Iном = 5 А, чуть позже объясню почему именно такое значение выбрал.
Так же здесь указываем напряжение обмотки питания драйвера как на скриншоте в начале.
Справа, в программе, задаем параметры сердечника, на котором будем мотать трансформатор. В базе программы уже есть параметры наиболее распространённых сердечников. Я использовать буду сердечник от трансформатора с компьютерного ИИП, собственно его размеры и выбрал.
После ввода всех данных жмем кнопку «Рассчитать». И смотрим, получилось.
Параметры, которые нужны для изготовления ИИП на UC3842.
Величина немагнитного зазора – зазор между частями магнитопровода трансформатора. Программа рассчитывает полный минимальный зазор. Получился 2,071 мм. Берем чуть больше. Делим его пополам, получаем прокладки толoиной чуть более 1 мм. При сборке трансформатора устанавливаем их так как показано на картинке.
Теперь смотрим параметры обмоток.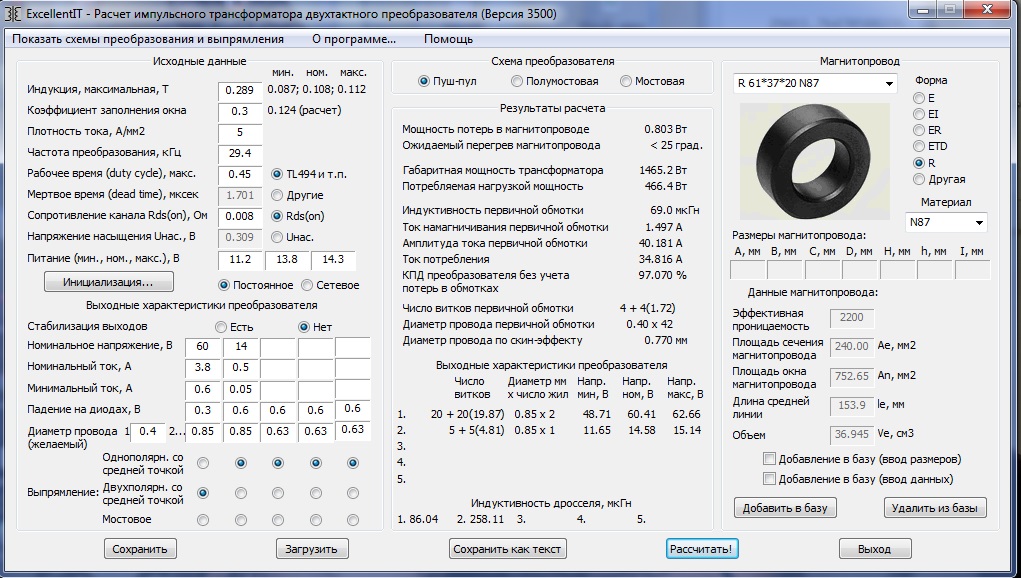
Первичная обмотка. Необходимо мотать 42 витка в два провода диаметром 0,335 мм. Здесь так же видим амплитуду тока транзистора 4,488 А – это ток который должен «держать» транзистор. Именно из этого параметра выбран ток вторичных обмоток 5 А. Напомню, используемый ключ IRF840 китайского производства. Максимальный ток по датасшиту 8 А. В программе, в графе «вторичные обмотки, Iном» я проставлял различную силу тока, жал кнопку рассчитать и смотрел, что получится в графе амплитуда тока транзистора. Смотрел, чтоб он был ниже максимального тока по датасшину, на процентов 25-30. Так, методом научного тыка, и был получен ток вторичных обмоток 5 А.
Из расчетов берем значение сопротивления датчика тока 0,201 Ом – это сопротивление R13 и минимальную емкость буферной емкости 201 мкФ С3 и С4, вместо которых буду ставить один конденсатор на 220 мкФ.
Вторичные обмотки получились по 6 витков косичкой по 9 проводов диаметром 0,335 мм в каждой.
Обмотка питания драйвера 7 витков одним проводом диаметром 0,335 мм.
В расчетах вторичных обмотках обращаем внимание на параметр Ud – минимальное обратное напряжение выпрямительных диодов.
C трансформатором разобрались. Рассчитаем RCD клампер, цепочку С6 – R6 – VD4 – служит для сглаживания «выбросов» с трансформатора.
Ставим точу напротив имеющегося конденсатора (в моем случае 10 нФ) и жмем рассчитать. Получаем резистор сопротивлением 10,3 кОм мощностью не менее 2,259 Вт и диод FR307.
Рассчитаем частоту задающие элементы R9 и С10.
Выбираем «Обратный расчет. Заданы F и С». Указываем частоту работы 60 кГц и имеющийся конденсатор. Жмем рассчитать. Меняем емкость конденсатора до тех пор, пока сопротивление резистора не окажется наиболее подходящим. У меня получилось С10 = 15 нФ и R9 = 1,5 кОм.
Вроде бы все. Если что-то забыл спрашиваем в комментариях/на форуме.
В следующей статье опишу намотку трансформатора.
П.С. Отдельное спасибо автору программ некому “Старичку”. Не знаю кто ты, но проделанная работа действительно заслуживает уважения!
Не знаю кто ты, но проделанная работа действительно заслуживает уважения!
Расчет импульсного блока питания курсовая по радиоэлектронике
СОДЕРЖАНИЕ 1 Введение………………………………………………………………………………………………………………………………. 4 Введение Инвертором называется прибор, схема, или система, которое создаёт переменное напряжение при подключении источника постоянного напряжения. Существует другой способ определения: инверсия – функция обратная выпрямлению. Выпрямители преобразуют переменное напряжения в постоянное, а инверторы наоборот, превращают постоянное напряжение в переменное. Инверторы совсем не редкие устройства. Под другими названиями они появляются в многочисленных приложениях. Инверторами, конечно, можно назвать и вибропреобразователи, и генераторы с обратной связью, и релаксационные генераторы. Фактически, использование названий “инвертор” и “генератор” несколько произвольно. Инвертор может быть генератором, а генератор можно использовать как инвертор. Обычно предпочитали использовать термин “инвертор” когда рабочая частота была меньше чем 100 кГц, и выполняемая им операция обеспечивала переменным напряжением некоторую другую схему или оборудование. Современные инверторы не имеют ограничений по частоте. Поскольку нет чётко установленной границы между инверторами и генераторами, можно сказать, что многие инверторы являются генераторами специального типа. Другие инверторы могут по существу быть усилителями или управляемыми переключателями. Выбор термина фактически определяется тем, как расставлены акценты. Схема создающая радиочастотные колебания с относительно высокой стабильностью частоты традиционно называлась генератором. Схему генератора, в которой основное внимание обращается на такие параметры как к.п. д., возможность регулирования и способность выдерживать перегрузки, и которая работает в диапазоне звуковых или инфразвуковых частот, можно назвать инвертором. На практике, когда мы рассматриваем конечное назначение схемы, различие между инверторами и генераторами, становятся достаточными очевидными.
 Назначение схемы тут же подскажет, как более правильно её называть: генератором или инвертором. Обычно инвертор применяется в качестве источника питания. 3. Схема управления инвертором 3.1 Управление инвертором с помощью специализированной СУ Инверторы и преобразователи нередко являются частью больших систем, типа источников питания, стабилизаторов, устройств для управления электродвигателями и т.д. В таких случаях их выходные напряжения являются объектом управления. Управление может быть ручным или автоматическим. Одной из наиболее трудных задач при разработке этих систем была реализация маломощных и логических схем, осуществляющих это управление. Возникает множество проблем, если такая схема управления использует дискретные компоненты. Кроме того, сложность и стойкость такой схемы управления обычно достаточно высоки. Это часто вызывает удивление, поскольку считается, что большая часть усилий при разработки по праву приходится на силовые цепи. Чтобы получить надежность, воспроизводимость, приемлемый объем, и операционную гибкость, часто приходится мириться с худшими, чем хотелось бы параметрами.
Назначение схемы тут же подскажет, как более правильно её называть: генератором или инвертором. Обычно инвертор применяется в качестве источника питания. 3. Схема управления инвертором 3.1 Управление инвертором с помощью специализированной СУ Инверторы и преобразователи нередко являются частью больших систем, типа источников питания, стабилизаторов, устройств для управления электродвигателями и т.д. В таких случаях их выходные напряжения являются объектом управления. Управление может быть ручным или автоматическим. Одной из наиболее трудных задач при разработке этих систем была реализация маломощных и логических схем, осуществляющих это управление. Возникает множество проблем, если такая схема управления использует дискретные компоненты. Кроме того, сложность и стойкость такой схемы управления обычно достаточно высоки. Это часто вызывает удивление, поскольку считается, что большая часть усилий при разработки по праву приходится на силовые цепи. Чтобы получить надежность, воспроизводимость, приемлемый объем, и операционную гибкость, часто приходится мириться с худшими, чем хотелось бы параметрами. Например, схема управления должна обеспечить такие возможности, как мягкий запуск, защиту от перегрузок, широтно- импульсную модуляцию и регулируемое время паузы. Здесь мы имеем в виду не автоколебательные инверторы, а инверторы с внешним возбуждением. Весь потенциал современных транзисторов, диодов, трансформаторов и конденсаторов не может помочь перед лицом таких общих проблем управления, как флуктуации, недостаточное время паузы, несимметричный рабочий цикл, а также ограниченная или отсутствующая возможность широтно-импульсной модуляции. Эти проблемы можно преодолеть с помощью специальных интегральных схем, разработанных для управления инверторами и преобразователями. Две из них представлены ниже. Единственный параметр – время паузы уже делает эти микросхемы ценными. Это вызвано тем, что одной из трудностей, с которой сталкиваются при желании иначе управлять инвертором с внешним возбуждением, является возможность появления синфазной проводимости (одновременно проводят оба транзистора).
Например, схема управления должна обеспечить такие возможности, как мягкий запуск, защиту от перегрузок, широтно- импульсную модуляцию и регулируемое время паузы. Здесь мы имеем в виду не автоколебательные инверторы, а инверторы с внешним возбуждением. Весь потенциал современных транзисторов, диодов, трансформаторов и конденсаторов не может помочь перед лицом таких общих проблем управления, как флуктуации, недостаточное время паузы, несимметричный рабочий цикл, а также ограниченная или отсутствующая возможность широтно-импульсной модуляции. Эти проблемы можно преодолеть с помощью специальных интегральных схем, разработанных для управления инверторами и преобразователями. Две из них представлены ниже. Единственный параметр – время паузы уже делает эти микросхемы ценными. Это вызвано тем, что одной из трудностей, с которой сталкиваются при желании иначе управлять инвертором с внешним возбуждением, является возможность появления синфазной проводимости (одновременно проводят оба транзистора).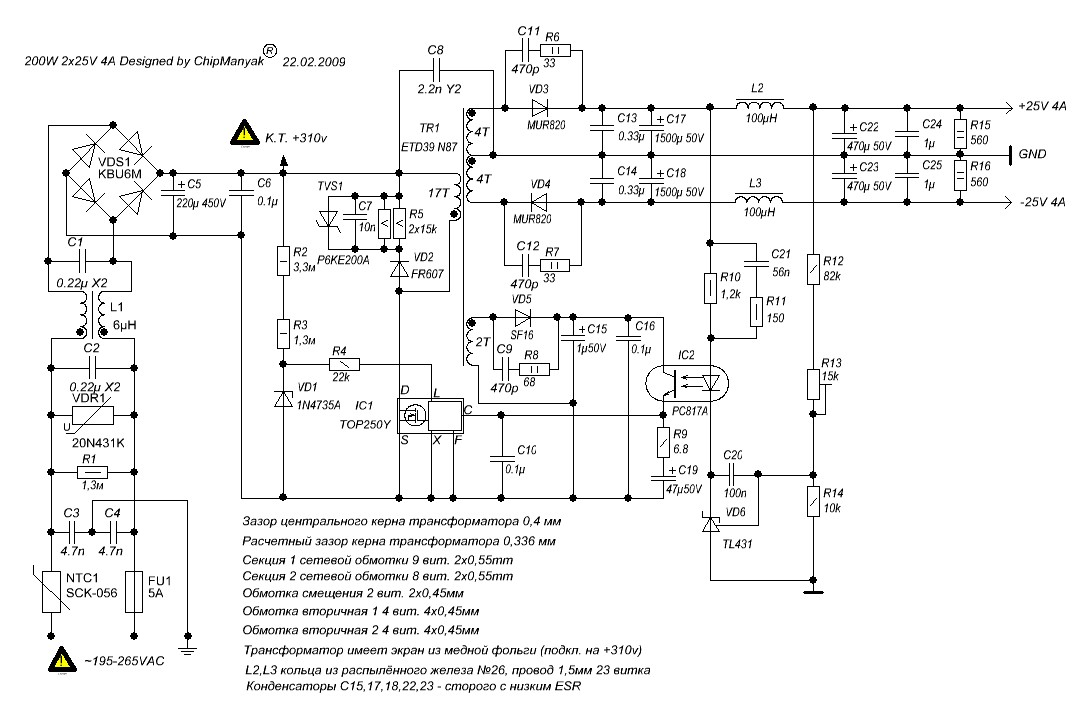 Наличие этого недостатка связано с большим временем выключения транзисторов, с флуктуациями в возбуждающем генераторе и с наличием реактивных нагрузок. Хорошим решением этой проблемы является использование колебаний ступенчатой формы, типа тех, что показаны на рис 3. Такие колебания формируется рассматриваемой ниже микросхемы широтно- импульсного модулятора. Интервалы необходимы для избегания сквозных токов Входной импульс Импульсы, подаваемые на базу 1го и 2-го транзистора соответственно 3.2 Управляемый широтно-импульсный модулятор IR2153 (Самотактируемый полумостовой драйвер). Отличительные особенности: • Управляющие каналы разработаны для нагруженного функционирования полностью работоспособны до +600В • Нечувствителен к отрицательным напряжениям при переходных процессах • Стойкость к скорости нарастания напряжения (dV/dt) • Блокировка при снижении напряжения • Программируемая частота генератора • Согласованная задержка распространения для обоих каналов • Микро мощность при старте (ток до 125 мкА) • Выход драйвера нижнего уровня в фазе с RT • Напряжение смещения VOFFSET не более 600В • Скважность 2 (меандр) • Имп.
Наличие этого недостатка связано с большим временем выключения транзисторов, с флуктуациями в возбуждающем генераторе и с наличием реактивных нагрузок. Хорошим решением этой проблемы является использование колебаний ступенчатой формы, типа тех, что показаны на рис 3. Такие колебания формируется рассматриваемой ниже микросхемы широтно- импульсного модулятора. Интервалы необходимы для избегания сквозных токов Входной импульс Импульсы, подаваемые на базу 1го и 2-го транзистора соответственно 3.2 Управляемый широтно-импульсный модулятор IR2153 (Самотактируемый полумостовой драйвер). Отличительные особенности: • Управляющие каналы разработаны для нагруженного функционирования полностью работоспособны до +600В • Нечувствителен к отрицательным напряжениям при переходных процессах • Стойкость к скорости нарастания напряжения (dV/dt) • Блокировка при снижении напряжения • Программируемая частота генератора • Согласованная задержка распространения для обоих каналов • Микро мощность при старте (ток до 125 мкА) • Выход драйвера нижнего уровня в фазе с RT • Напряжение смещения VOFFSET не более 600В • Скважность 2 (меандр) • Имп. вых. ток к. з Iо± 210 мА/ 420 мА • Выходное напряжение драйверов VOUT 10 – 20В • Пауза 1.2 мкс Типовая схема включения: Блок-схема: Расположение выводов: Описание выводов: Rt Резистор задающего генератора, для нормального функционирования в фазе с LO Ct Конденсатор задающего генератора VB Напряжение питания ключей верхнего уровня HO Выход драйвера верхнего уровня VS Возврат питания верхнего уровня VCC Питание драйверов нижнего уровня и логики LO Выход драйвера нижнего уровня COM Возврат питания нижнего уровня Описание: IR2155 – драйвер с самотактированием высоковольтных, высокоскоростных МОП-транзисторов или IGBT-транзисторов с выходными каналами нижнего и верхнего уровней. Собственная HVIC-технология и стойкая к защелкиванию КМОП-технология позволили создать монолитную конструкцию. Внешние параметры генератора определяются эквивалентно таймеру 555 (К1006ВИ1). Выходы драйверов отличаются высоким импульсным током буферного каскада и паузой при переключении каналов, что выполнено для минимизации встречной проводимости драйвера.
вых. ток к. з Iо± 210 мА/ 420 мА • Выходное напряжение драйверов VOUT 10 – 20В • Пауза 1.2 мкс Типовая схема включения: Блок-схема: Расположение выводов: Описание выводов: Rt Резистор задающего генератора, для нормального функционирования в фазе с LO Ct Конденсатор задающего генератора VB Напряжение питания ключей верхнего уровня HO Выход драйвера верхнего уровня VS Возврат питания верхнего уровня VCC Питание драйверов нижнего уровня и логики LO Выход драйвера нижнего уровня COM Возврат питания нижнего уровня Описание: IR2155 – драйвер с самотактированием высоковольтных, высокоскоростных МОП-транзисторов или IGBT-транзисторов с выходными каналами нижнего и верхнего уровней. Собственная HVIC-технология и стойкая к защелкиванию КМОП-технология позволили создать монолитную конструкцию. Внешние параметры генератора определяются эквивалентно таймеру 555 (К1006ВИ1). Выходы драйверов отличаются высоким импульсным током буферного каскада и паузой при переключении каналов, что выполнено для минимизации встречной проводимости драйвера.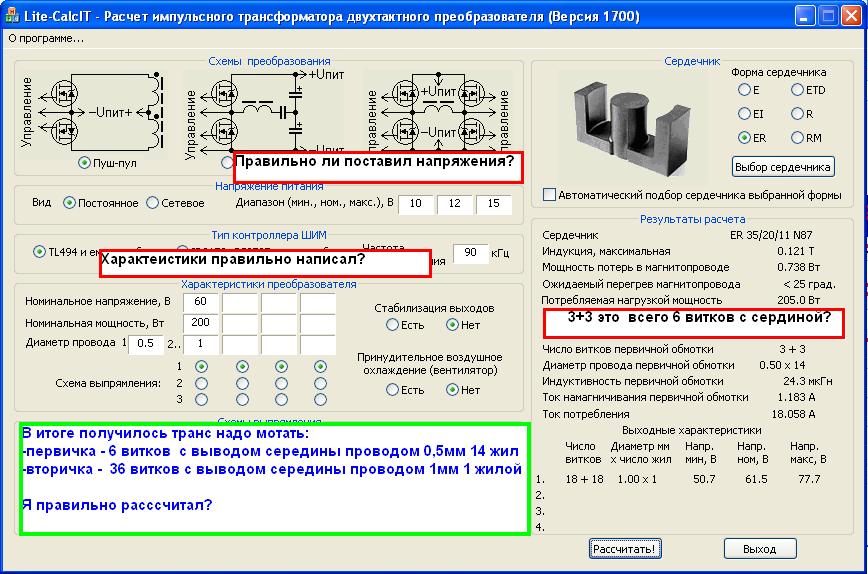 Задержки распространения сигналов для обеих каналов согласованы для упрощения использования в приложениях со скважностью. 2. Выходной канал может быть использован для управления N- канальным силовым МОП-транзистором или IGBT-транзистором с напряжением питания верхнего уровня до 600В. 5. Принципиальная схема дифференциального инвертора Составим принципиальную схему дифференциального инвертора. В качестве управления дифференциальным инвертором будем использовать микросхему широтно-импульсного модулятора. Смотреть приложение. 5.1. Описание работы схемы. Предлагаемый полумостовой преобразователь напряжения отличается простотой конструкции и не требует налаживания. Основой преобразователя является микросхема IR2153 Представляющая собой драйвер двух ключей (IGBT или MOSFET) имеющий один выход для управления нижним ключом полумоста (LO) и один выход для верхнего ключа (HO)с плавающим потенциалом управления. Допустимое напряжение на инверторе, с которым работает микросхема, составляет 600 В. Переменное напряжение 220вольт поступающее через разъем Х1 проходит через заграждающий фильтр С1,С2,L1 выпрямляется диодным мостом VD1-VD4 и сглаживается последовательно соединенными конденсаторами С6,С7.
Задержки распространения сигналов для обеих каналов согласованы для упрощения использования в приложениях со скважностью. 2. Выходной канал может быть использован для управления N- канальным силовым МОП-транзистором или IGBT-транзистором с напряжением питания верхнего уровня до 600В. 5. Принципиальная схема дифференциального инвертора Составим принципиальную схему дифференциального инвертора. В качестве управления дифференциальным инвертором будем использовать микросхему широтно-импульсного модулятора. Смотреть приложение. 5.1. Описание работы схемы. Предлагаемый полумостовой преобразователь напряжения отличается простотой конструкции и не требует налаживания. Основой преобразователя является микросхема IR2153 Представляющая собой драйвер двух ключей (IGBT или MOSFET) имеющий один выход для управления нижним ключом полумоста (LO) и один выход для верхнего ключа (HO)с плавающим потенциалом управления. Допустимое напряжение на инверторе, с которым работает микросхема, составляет 600 В. Переменное напряжение 220вольт поступающее через разъем Х1 проходит через заграждающий фильтр С1,С2,L1 выпрямляется диодным мостом VD1-VD4 и сглаживается последовательно соединенными конденсаторами С6,С7.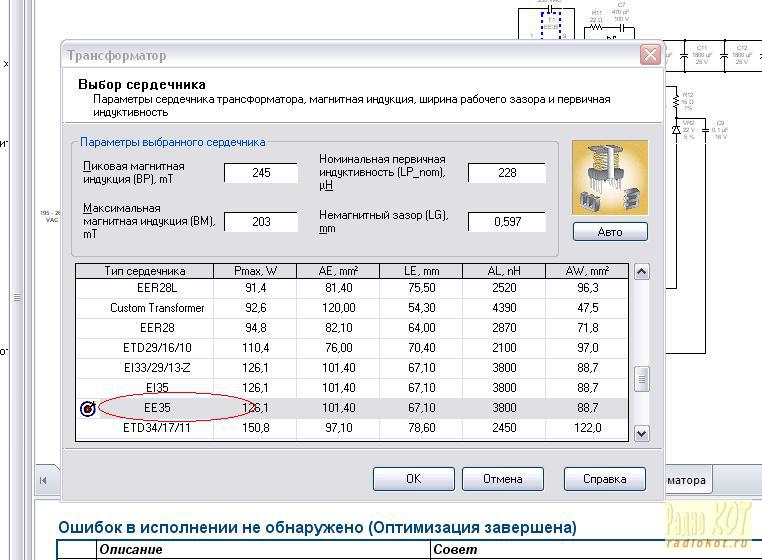 Рис1. Фильтр необходим для предотвращения проникновения помех от преобразователя в сеть. Напряжение питания на микросхему D1 поступает через резистор R1 и сглаживается конденсатором С3. Напряжение на выводе VCC микросхемы D1 не может быть выше 15,6 вольт так как внутри микросхемы между выводами 1и 4 установлен стабилитрон. Цепочка R2, C4 задает частоту работы задающего генератора и равна 40кГц, при необходимости может изменяться от 80 Гц до 1 МГц при условии что минимальные значения R2 и C4 должны находиться в пределах 10кОм и 330пФ соответственно. Для подбора данных деталей можно воспользоваться номограммой Верхний ключ открывается с выхода HO, нижний с выхода LO между включениями одного и другого ключа выдерживается пауза 1,2 мкс благодаря чему предотвращается протекание сквозных токов через транзисторы. Бутстреповая ёмкость С5 заряжается через диод VD5 при включении нижнего ключа VT2. Первичная обмотка трансформатора Т1 подключена к делителю напряжения образованному конденсаторами С6,С7 и силовыми ключами VT1,VT2.
Рис1. Фильтр необходим для предотвращения проникновения помех от преобразователя в сеть. Напряжение питания на микросхему D1 поступает через резистор R1 и сглаживается конденсатором С3. Напряжение на выводе VCC микросхемы D1 не может быть выше 15,6 вольт так как внутри микросхемы между выводами 1и 4 установлен стабилитрон. Цепочка R2, C4 задает частоту работы задающего генератора и равна 40кГц, при необходимости может изменяться от 80 Гц до 1 МГц при условии что минимальные значения R2 и C4 должны находиться в пределах 10кОм и 330пФ соответственно. Для подбора данных деталей можно воспользоваться номограммой Верхний ключ открывается с выхода HO, нижний с выхода LO между включениями одного и другого ключа выдерживается пауза 1,2 мкс благодаря чему предотвращается протекание сквозных токов через транзисторы. Бутстреповая ёмкость С5 заряжается через диод VD5 при включении нижнего ключа VT2. Первичная обмотка трансформатора Т1 подключена к делителю напряжения образованному конденсаторами С6,С7 и силовыми ключами VT1,VT2. Конденсаторы С8,С9 подключенные параллельно выпрямительным диодам VD6,VD7 значительно снижают амплитуду выбросов в моменты переключения диодов. Сетевой фильтр намотан на ферритовом кольце К20х12х6 марки М2000HM сложенным вдвое проводом МГТФ 0,12 и содержит 25-30 витков. Трансформатор Т1 намотан на Ш – образном магнитопроводе типоразмера М2000НМ Ш7х7. Первичная обмотка содержит 260 витков провода ПЭВ-2 диаметром 0,3мм. Вторичные обмотки обеспечивают выходное напряжение 27 вольт при токе 3,5 ампера и содержат по 15 витков сложенным в двое проводом ПЭВ-2 диаметром 0,5. Конденсаторы С1,C2 типа К73-17, С4,C8,C9 керамические, электролитические C3,C5,C6,C7,C10 типа К50-35. Вместо VD1- VD5 подойдут любые другие на ток 0,7А и напряжение 400вольт, вместо VD6,VD7 желательно применить диоды шотки типа КД2997 установленные на игольчатый радиатор размером 25х40мм. Заключение В данной курсовой работе был рассмотрен дифференциальный инвертор со средней точкой. На первом этапе работы была составлена структурная схема импульсного источника питания.
Конденсаторы С8,С9 подключенные параллельно выпрямительным диодам VD6,VD7 значительно снижают амплитуду выбросов в моменты переключения диодов. Сетевой фильтр намотан на ферритовом кольце К20х12х6 марки М2000HM сложенным вдвое проводом МГТФ 0,12 и содержит 25-30 витков. Трансформатор Т1 намотан на Ш – образном магнитопроводе типоразмера М2000НМ Ш7х7. Первичная обмотка содержит 260 витков провода ПЭВ-2 диаметром 0,3мм. Вторичные обмотки обеспечивают выходное напряжение 27 вольт при токе 3,5 ампера и содержат по 15 витков сложенным в двое проводом ПЭВ-2 диаметром 0,5. Конденсаторы С1,C2 типа К73-17, С4,C8,C9 керамические, электролитические C3,C5,C6,C7,C10 типа К50-35. Вместо VD1- VD5 подойдут любые другие на ток 0,7А и напряжение 400вольт, вместо VD6,VD7 желательно применить диоды шотки типа КД2997 установленные на игольчатый радиатор размером 25х40мм. Заключение В данной курсовой работе был рассмотрен дифференциальный инвертор со средней точкой. На первом этапе работы была составлена структурная схема импульсного источника питания. Блоками представлены выпрямители, фильтры, дифференциальный инвертор, система управления. На втором этапе была рассмотрена система управления дифференциального инвертора. Система управления представлена широтно-импульсным модулятором SG 2524. На третьем этапе была составлена принципиальная схема импульсного источника питания. На принципиальной схеме обозначены номиналы и обозначения радиоэлементов. Представлено описание принципиальной схемы. На последнем этапе расписывается методика выбора транзисторов и диодов дифференциального инвертора, а также выпрямителя импульсного источника питания. Список литературы 1. Малогабаритная радио аппаратура “Справочник” Издан второе Киев 1972г 2. Справочник по полупроводниковым диодам и транзисторам. Издание четвёртое под редакцией Н.Н. Горюнова. 3. Колганов А. Импульсный блок питания мощного УМЗЧ. — Радио, 2000, № 2, с. 36—38. 4. Бирюков С. А. Применение цифровых микросхем серий ТТЛ и КМОП. — ДМК, 1999. 5. Козельский В. Задающие генераторы импульсных блоков питания.
Блоками представлены выпрямители, фильтры, дифференциальный инвертор, система управления. На втором этапе была рассмотрена система управления дифференциального инвертора. Система управления представлена широтно-импульсным модулятором SG 2524. На третьем этапе была составлена принципиальная схема импульсного источника питания. На принципиальной схеме обозначены номиналы и обозначения радиоэлементов. Представлено описание принципиальной схемы. На последнем этапе расписывается методика выбора транзисторов и диодов дифференциального инвертора, а также выпрямителя импульсного источника питания. Список литературы 1. Малогабаритная радио аппаратура “Справочник” Издан второе Киев 1972г 2. Справочник по полупроводниковым диодам и транзисторам. Издание четвёртое под редакцией Н.Н. Горюнова. 3. Колганов А. Импульсный блок питания мощного УМЗЧ. — Радио, 2000, № 2, с. 36—38. 4. Бирюков С. А. Применение цифровых микросхем серий ТТЛ и КМОП. — ДМК, 1999. 5. Козельский В. Задающие генераторы импульсных блоков питания.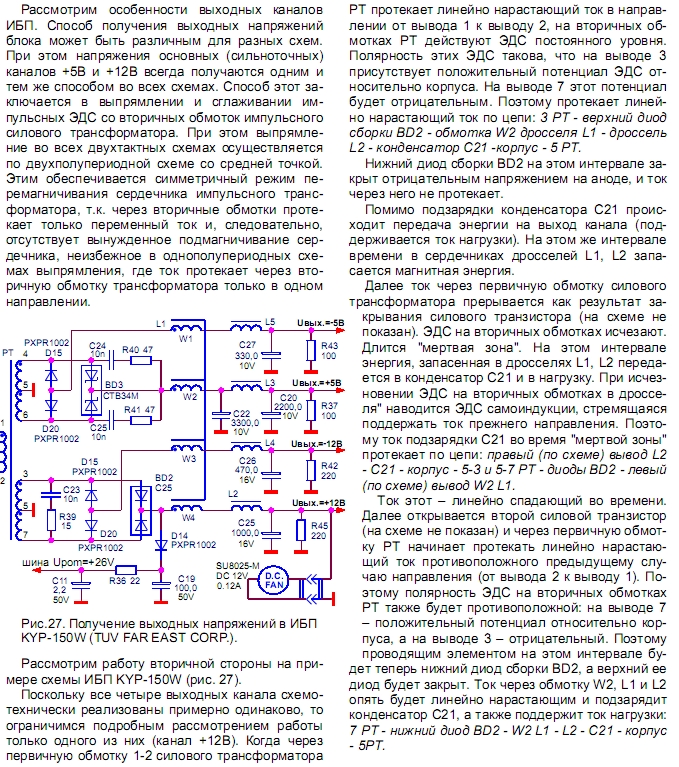 — Радио, 2001, № 3,с. 36, 37. 6. Трифонов А. Выбор балластного конденсатора. — Радио,1999,№ 4,с. 44.
— Радио, 2001, № 3,с. 36, 37. 6. Трифонов А. Выбор балластного конденсатора. — Радио,1999,№ 4,с. 44.
Намотка и расчет трансформатора. Подробно
Приветствую, Самоделкины!Расчеты и намотка импульсного трансформатора относительно сложный процесс, с которым многие предпочитают не связываться. Однако, многие самоделки нуждаются в источнике питания, но из-за сложности схем источников питания, радиолюбители часто используют железные трансформаторы.
Они надежны, но, когда речь идет о размерах и весе, уступают импульсным источникам питания. Перед вами сейчас 2 трансформатора.
Оба они где-то на 300 ватт. В чем их отличие, достоинства и недостатки, думаю и так понятно. Сегодня мы поговорим о намотке импульсного трансформатора для сетевого импульсного источника питания. Из этой статьи вы сможете ознакомиться непосредственно с самим процессом подготовки трансформатора, расчета и намотки.
Для начала нужно определиться с трансформатором.

Нужный сердечник естественно можно купить в магазине, но думаю каждый найдет у себя нерабочий компьютерный блок питания.
Ведь в любом блоке питания есть трансформатор, точнее целых три: трансформатор дежурки, управления и основной силовой.
Силовой трансформатор ни с чем не спутаешь, он самый большой.
Аккуратно выпаиваем его, а плату обратно отправляем на чердак.
Далее из трансформатора убирается фиксирующий скотч, сам сердечник нужно нагреть, например, паяльником или паяльный феном, а можно также сварить в кипятке.
Способы разборки импульсных трансформаторов уже не раз показывались в видеороликах автора (кому интересно, ссылка будет в описании под видеороликом).
Нагревается трансформатор для ослабления клея, которым приклеены половинки сердечника. Далее аккуратно снимаем половинки сердечника, после начинаем демонтаж старых обмоток. Тут любые способы хороши, так как провод от старых обмоток нам больше не пригодится.
После аккуратной разборки трансформатора нужно и каркас, и половинки сердечника очистить от старого клея.
Все вроде бы готово, теперь начинается самое интересное – расчет трансформатора. Вы, наверное, подумали, что будут формулы и тому подобное, но нет, на самом деле у меня для вас отличная новость. В настоящее время существует множество приложений как для смартфона, так и для компьютерных операционных систем. Автор решил разобрать процесс расчета на примере такого приложения:
Оно все сделает за вас. Открываем приложение и выбираем топологию преобразователя, в данном случае это полумост.
После этого указываем желаемой диаметр провода первичной обмотки.
Далее выбираем тип силовых транзисторов, у нас это полевики, поэтому выбираем MOSFET.
Для наиболее точного расчета советую в даташите выбранного транзистора посмотреть выделенный красным на рисунке ниже пункт или сопротивление открытого канала, и вбить этот параметр в программу.

Далее нужно указать напряжение питания. Выбирая один из двух пунктов (сетевое или постоянное), программа автоматически подбирает минимальное номинальное и максимальное напряжение, но эти данные можно менять вручную. Кстати, программа может делать расчет трансформатора как для понижающего, так и для повышающего преобразователя.
Далее выбираем сердечник.
Тут все просто, штангенциркуль в руки и в добрый путь.
Приложение содержит огромную базу данных с характеристиками популярных сердечников: кольцевой, Ш-образный и даже броневые.
Вы обязательно найдете нужный вам сердечник, ну или максимально похожий по параметрам, главное искать внимательно. Основные параметры сердечника дополнительно не выводятся, это скрыто от глаз пользователя для того, чтобы упростить программу. После выбираем частоту преобразователя в Герцах, в нашем случае это 50 кГц или 50 000 Гц.
Далее нужно указать требуемое выходное напряжение, ток и желаемый диаметр провода вторичной обмотки.
Ну и в самом конце, выбираем тип выпрямителя.
В нашем случае он однополярный со средней точкой и падением напряжения на диодах. В случае обычных диодов, это как правило 0,5-0,7 В. А в случае диодов Шоттки – 0,15 – 0,3 В. Эти параметры легко проверить с помощью мультиметра.
Осталось только нажать на кнопку «Показать результат» и все готово. Если что-то не так, то программа выведет ошибку, и скажет, что нужно менять.
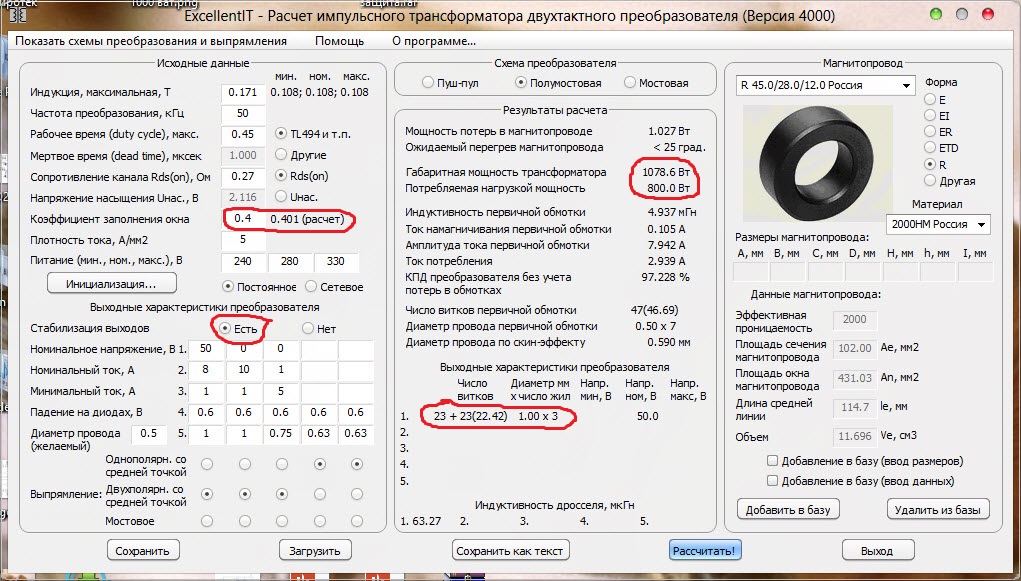
В самом низу отображаются основные параметры, которые требовалось узнать: число витков и диаметр провода первичной и вторичной обмотки, минимальное номинальное и максимальное напряжение на вторичной обмотке, но это не все. Так же программа посчитает и выведет на экран габаритную мощность сердечника, мощность, потребляемую нагрузкой, КПД инвертора и многое другое.
При расчете важно указать наличие активного охлаждения или вентилятора. Если он имеется, то с трансформатора можно снять больше мощности. Программа выдает оптимальные данные для намотки, которые естественно зависят от самого сердечника, рабочей частоты генератора и наличия активного охлаждения.
 В нашем случае габаритная мощность сердечника около 60Вт, несмотря на то, что он из компьютерного блока питания. Конечно можно снять и больше мощности, но это уже будет не штатный режим для такого сердечника. На данный момент, это приложение доступно на двух языках: русский и английский и только для пользователей операционной системы android, но очень скоро выйдет и версия для ценителей яблочной продукции. Приложение платное, но можете воспользоваться аналогами. Ссылку на данное приложение автор оставил в описании под видео.
В нашем случае габаритная мощность сердечника около 60Вт, несмотря на то, что он из компьютерного блока питания. Конечно можно снять и больше мощности, но это уже будет не штатный режим для такого сердечника. На данный момент, это приложение доступно на двух языках: русский и английский и только для пользователей операционной системы android, но очень скоро выйдет и версия для ценителей яблочной продукции. Приложение платное, но можете воспользоваться аналогами. Ссылку на данное приложение автор оставил в описании под видео.После расчета, зная все необходимые параметры, начинаем намотку. Очень желательно намотку делать так: сначала на голый каркас мотаем половину первичной обмотки, затем вторичную обмотку целиком, а поверх вторую половину первички (как это сделано в трансформаторе компьютерных блоков питания).
Но можно не заморачиваться, так что мотаем первичку целиком, а поверх вторичную обмотку. Не забываем изолировать каждый слой намотки.
Мотаем максимально аккуратно – виток к витку.
В конце мотаем вторичную обмотку. Для удобства обе плечи мотаем сразу сдвоенным проводом.
Эту обмотку тоже мотают послойно, желательно каждый слой изолировать. Но если обмотка низковольтная этого можно не делать, но желательно.
Готовый трансформатор собираем обратно. Сердечник можно приклеить, а можно просто стянуть скотчем, или и то, и другое.
Благодарю за внимание. До новых встреч!
Видеоролик:
Источник (Source) Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.
SPbPU EL – Разработка импульсного блока питания на базе ШИМ-контроллера UC3842: выпускная квалификационная рабо.
 ..
..
Данная работа посвящена вопросу модификации существующих схемотехнических решений импульсных блоков питания под управлением ШИМ-контроллеров распространённой серии UC384x. Цель работы – разработка универсального источника вторичного питания с широким диапазоном регулировки выходного напряжения и размещение его компонентов на печатной плате, имеющей размеры 9х12 см.
Задачи, которые решались в ходе выполнения работы:
1. Выбор топологии схемы разрабатываемого блока питания;
2. Расчёт элементов принципиальной схемы устройства и выбор компонентов в рамках её разработки;
3. Проверка работоспособности схемы с помощью схемотехнического моделирования в системе автоматического проектирования;
4. Трассировка печатной платы устройства.
В результате работы был разработан обратноходовой импульсный блок питания, работающий от сети переменного тока 220 В ± 20%, с диапазоном регулировки выходного напряжения 14 ÷ 28 В, максимальной выходной мощностью 180 Вт и расчётным КПД ≈ 85,4%. Область применения: Питание широкого спектра электронных устройств.
Вывод: Задание на выпускную квалификационную работу выполнено в полном объёме.
Область применения: Питание широкого спектра электронных устройств.
Вывод: Задание на выпускную квалификационную работу выполнено в полном объёме.
This work is dedicated to the modification of existing circuit designs of switch-mode power supplies based on a widespread UC384x series of PWM controllers. The purpose of this work is to develop an universal secondary power supply with a wide range of output voltage adjustment and to place its components on a printed circuit board with dimensions 9×12 cm.
Tasks that were solved in this work:
1. Selection of circuit topology for the power supply;
2. Calculation of circuit elements and selection of components;
3. Working capacity test of the circuit by its simulation in Micro-Cap;
4. PCB trace of the device.
As a result of this work a flyback switch-mode power supply using AC power 220 V ± 20% as a source, with output voltage adjustment ranged 14 ÷ 28 V, maximum output power 180 W and estimated efficiency ≈ 85,4% was developed.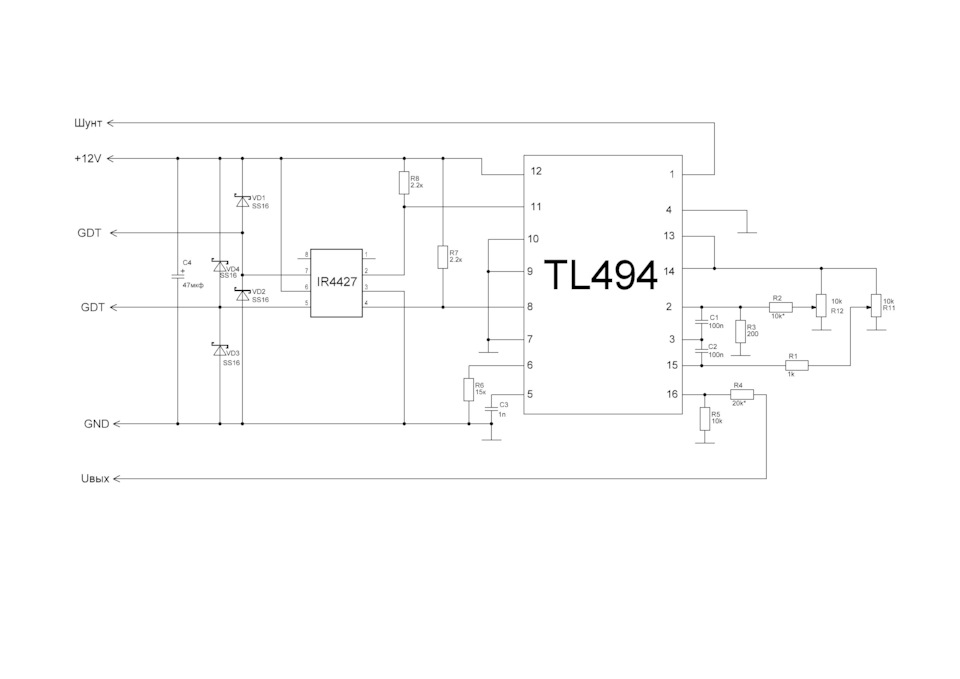 Scope: Supplying power to a wide range of electronic devices.
Conclusion: The task for the final qualification work is fully completed.
Scope: Supplying power to a wide range of electronic devices.
Conclusion: The task for the final qualification work is fully completed.
Двухтактные преобразователи (упрощенный расчет) /index php?name=ezcms&page_id=1594 – Документ
Как видно из схем они отличаются лишь емкостями фильтров первичного питания и используемыми силовыми транзисторами. Емкость фильтров первичного питания расчитывается из отношения 1 мкФ на 1 Вт выходной мощности, а силовые транзисторя олжны иметь максимальный ток минимум на 30% больше чем ток протекающий через первичную обмотку силового трансформатора при максимальной мощности. Для большей наглядности емкости фильтров первичного питания и рекомендуемые силовые транзисторы сведены в таблицу.
Суммарная мощность блока питания | Суммарная емкость конденсаторов первичного питания | Рекомендуемые силовые транзисторы |
400 Вт | 400 мкФ (2 шт по 220 мкФ) | IRF840, IRF740, STP8NK80Z, STP10NK60Z |
600 Вт | 600 мкФ (2 шт по 330 мкФ) | IRF740, STP14NK60Z, STP10NK60Z, IRFB18N50K |
1000 Вт | 1000 мкФ (2 шт по 470 мкФ) | IRF740, STP14NK60Z, STP10NK60Z, IRFB18N50K |
1500 Вт | 1300 мкФ (2 шт по 680 мкФ) | STP14NK60Z, STP25NM50N, SPA20N60C3, STP17NK40ZPFP, IRFP450, IRFP460 |
2000 Вт | 2000 мкФ (2 шт по 1000 мкФ) | STP25NM50N, SPA20N60C3, IRFP360, IRFP460, IRFP22N60K, SPW20N60C3 |
КРАСНЫЕ – корпус ТО-220, СИНИЕ – корпус ТО-247 | ||
Несколько слов об алгоритме работы данного блока питания:
В момент подачи сетевого напряжения 220 В емкости фильтров первичного питания С15 и С16 заражаются через резисторы R8 и R11, что не позволяет перегрузиться лиолному мосту VD током короткого замыканияполностью разряженных С15 и С16.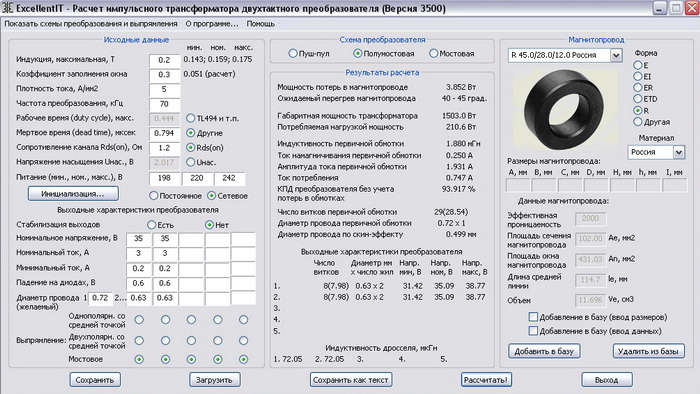 Одновременно происходит зарядка конденсаторов С1, С3, С6, С19 через линейку резисторов R16, R18, R20 и R22, стабилизатор 7815 и резистор R21.
Одновременно происходит зарядка конденсаторов С1, С3, С6, С19 через линейку резисторов R16, R18, R20 и R22, стабилизатор 7815 и резистор R21.
Как только величена напряжения на конденсаторе С6 достигнет 12 В стабилитрон VD1 “;пробивается”; и через него начинает течть ток заряжая конденсатор C18 и как только на плюсовом выводе этого конденсатора будет достигнута величина достаточная для открытия тиристора VS2 он откроется. Это повлечет включение реле К1, которое своими кнтактами зашунтирует токоограничивающие резисторы R8 и R11.Кроме этого открывшийся тиристор VS2 откроет транзистор VT1 и на контроллер TL494 и полумостовой драйвер IR2110. Контроллер начнет режим мягкого старта, длительность которого зависит от номиналов R7 и C13.
Во время мягкого старта длительность импульсов, открывающих силовые транзисторы увеличиваются постепенно, тем самым постепенно заряжая конденсаторы вторичного питания и ограничивая ток через выпрямительные диоды. Длительность увеличивается до тех пор, пока величина вторичного питания не станет достаточной для открытия светодиода оптрона IC1.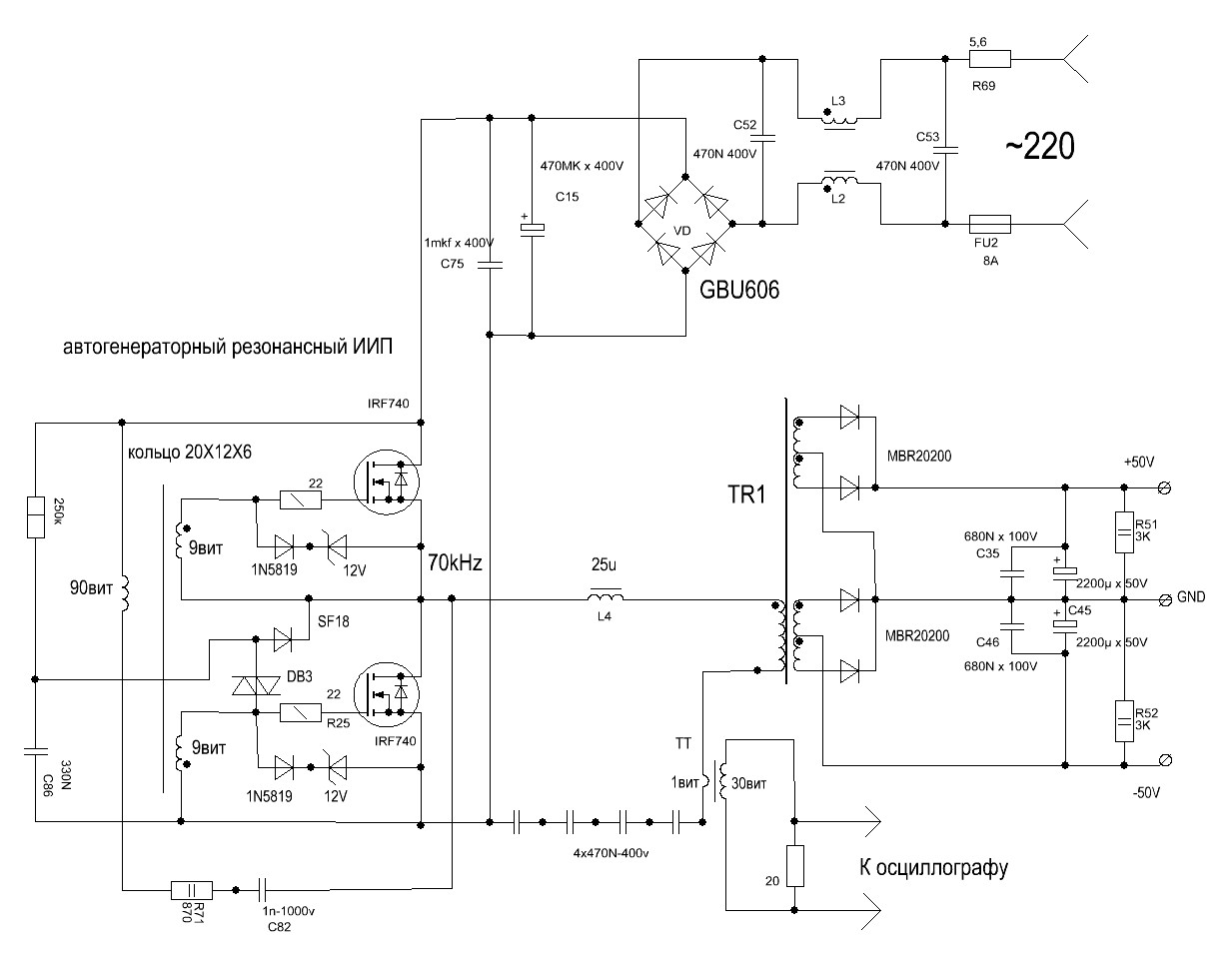 Как только яркость светодиода оптрона станет достаточной для открытия транзистора длительность импульсов перестанет увеличиваться (рисунок4).
Как только яркость светодиода оптрона станет достаточной для открытия транзистора длительность импульсов перестанет увеличиваться (рисунок4).
Рисунок 4. Режим мягкого старта.
Тут следует отметить, что длительность мягкого старта ограничена, поскольку проходящего через резисторы R16, R18, R20, R22 тока не достаточно для питания контроллера TL494 и драйвера IR2110 напряжение питания этих микросхем начнет уменьшаться и вскоре уменьшиться до величины, при которой TL494 перестанет вырабатывать импульсы управления. И именно до этого момента режим мягкого старта должен быть окончен и преобразователь должен выйти на нормальный режим работы, поскольку основное питание контроллер TL494 и дрейвер IR2110 получают от силового трансформатора (VD9, VD10 – выпрямитель со средней точкой, R23-C1-C3 – RC фильтр, IC3 – стабилизатор на 15 В) и именно поэтому конденсаторы C1, C3, C6, C19 имеют такие большие номиналы – они должны удерживать величнину питания контроллера до выхода его на обычный режим работы.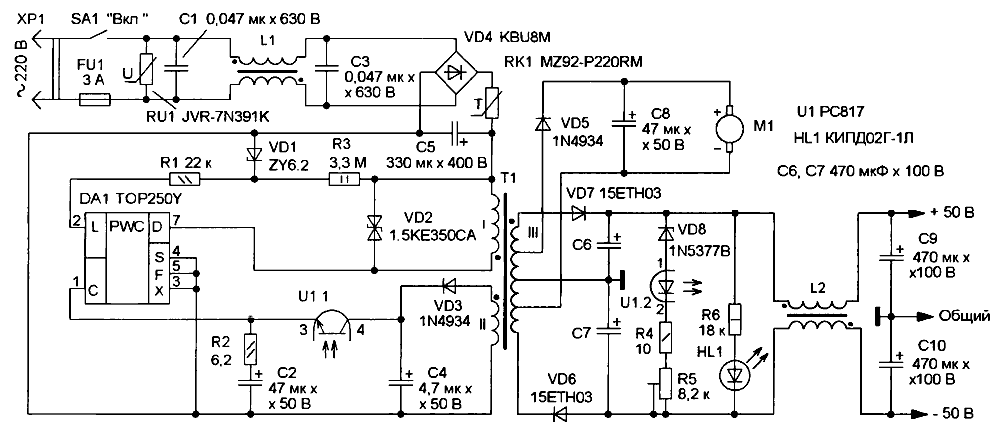
Стабилизация выходного напряжения происходит путем изменения длительности импульсов управления силовыми транзисторами при неизменной частоте – Широтно Импульсная Модуляция – ШИМ. Это возможно лишь при условии, когда величина вторичного напряжения силового трансформатора выше требуемой на выходе стабилизатора минимум на 30%, но не более 60%.
Рисунок 5. Принцип работы ШИМ стабилизатора.
При увеличении нагрузки выходное напряжение начинает уменьшаться, светодиод оптрона ШС1 начинает светиться меньше, транзисторы оптрона закрывается, тем самым увеличивая длительность импульсов управления до тех пор, пока действующее напряжение не достигнет величины стабилизации (рисунок 5). При уменьшении нагрузки напряжение начнет увеличиваться, светодиод оптрона IC1 начнет светиться ярче, тем самым открывая транзистор и уменьшая длительность управляющих импульсов дотех пор, пока величина действующего значения выходного напряжения не уменьшиться до стабилизируемой величины. Величину стабилизируемого напряжения регулируют подстроечным резистором R26.
Величину стабилизируемого напряжения регулируют подстроечным резистором R26.
Следует отметить, что контроллером TL494 регулируется не длительность каждого импулься в зависимости от выходного напряжения, а лишь среднее значение, т.е. измерительная часть имеет некотрую инерционость. Однако даже при установленных конденсаторах во вторичном питании емкостью 2200 мкФ провалы питания при пиковых кратковременных нагрузках не превышают 5 %, что вполне приемлемо для аппаратуры HI-FI класса. Мы же обычно ставим конденсаторы во вторичном питании 4700 мкФ, что дает уверенный запас на пиковые значения, а использование дросселя групповой стабилизации позволяет контролировать все 4 выходных силовых напряжения.
Данный импульсный блок питания оснащен защитой от перегрузки, измерительным элементом которой служит трансформатор тока TV1. Как только ток достигнет критической величины открывается тиристор VS1 и зашунитрует питание оконечного каскада контроллера. Импульсы управления исчезают и блок питания переходит в дежурный режим, в котором может находиться довольно долго, поскольку тиристор VS2 продолжает оставаться открытым – тока протекающего через резисторы R16, R18, R20 и R22 хватает для удержание его в открытом состоянии.![]()
Для вывода блока питания из дежурного режима необходимо нажать кнопку SA3, которая своим контактами зашунтирует тиристор VS2, ток через него перестанет течь и он закроется. Как только контакты SA3 разомкнуться транзистор VT1 закроется тме самы снимая питания с контроллера и драйвера. Таким образом схема управления перейдет в режим минимального потребления – тиристор VS2 закрыт, следовательно реле К1 выключено, транзистор VT1 закрыт, следовательно контроллер и драйвер обесточены. Конденсаторы С1, С3, С6 и С19 начинают заряжаться и как только напряжение достигнет 12 В откроется тиристор VS2 и произойдет запуск импульсного блока питания.
При необходимости перевести блок питания в дежурный режим можно воспользоваться кнопкой SA2, при нажатии на которую будут соеденены база и эмиттер транзистора VT1. Транзистор закроется и обесточит контроллер и драйвер. Импульсы управления исчезнут, исчезнут и вторичные напряжения. Однако питание не будет снято с реле К1 и повторного запука преобразователя не произойдет.
Расположение деталей на печатной плате показано на рисунке 6. Сразу следует оговориться – этот импульсный блок питания не для начинающих, поэтому некоторые номиналы на чертеже не проставлены, чтобы более опытные смогли разобраться, а начинающих это должно остановить.
Рисунок 6. Расположение деталей на плате сетевого импульсного блока питания для усилителей мощности до 1000 Вт.
УВЕЛИЧИТЬ СКАЧАТЬ В ФОРМАТЕ LAY
Немного крупнее и мощнее печатная плата показанная на рисунке 7. На ней установлены диоды вторичного питания в корпусе ТО-247, а в этом корпусе есть диоды с током до 80 А и 1200 В, а так же более крупный силовой трансформатор.
Рисунок 7. Расположение деталей на плате сетевого импульсного блока питания для усилителей мощности до 1000 Вт.
УВЕЛИЧИТЬ СКАЧАТЬ В ФОРМАТЕ LAY
Немного о деталях:
Силовой трансформатор мы изготавливаем на сердечниках от строчных трансформаторов телевизоров. Однако схожие параметры можно получить и на феритовых кольцах, правда частоту преобразования не стоит поднимать выше 70 кГц, поскольку даже уже на этой частоте феррит 2000 начинает греться из за внутренних потерь. В качестве дросселя групповой стабилизации мы используем сердечник от ТПИ. Обмотки распологаются встречно, как показанно на принципиальной схеме. Сечение проводников расчитывается из отношения 3-4 А на мм кв. Обмотки наматываются до заполнения окна. В случае использвания в качестве сердечника для дросселя групповой стабилизации ферритового кольца лучше использовать кольцо К40х25х11. Обмотки мотаются до уменьшения отверстия внутри до 14…16 мм. В качестве дополнительных фильтрующих индуктивностей мы используем сердечники от фильтров сетевого питания телевизоров, но эти фильтры можно намотать и на кольцах диаметром 20…25 мм. Обмотка мотается до заполнения, тем же проводом, что и дроссель групповой стабилизации.
При необходимости получить блок питания для усилителя с двухуровневым питанием выходные напряжения блока питания следует соеденить по схеме рисунка 8.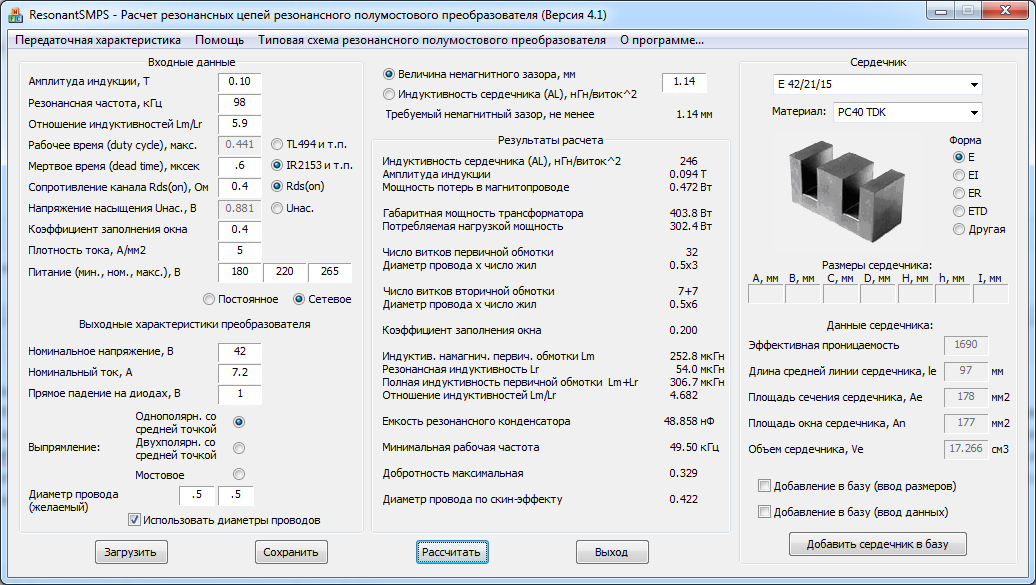
Рисунок 8. Схема соединений выходных напряжений для усилителя с двухуровневым питанием.
НЕКОТОРЫЕ ОСОБЕНОСТИ ДАННЫХ БЛОКОВ ПИТАНИЯ
Если повнимательней расмотреть принципиальную схему, то станет ясно, что контролируется лишь напряжение силовой части. Однако с этого же силового трансформатора производится и питание самой управляющей части блока. Поэтому без нагрузки в силовой части контролируеммое напряжение достигнув своей величины сократит длительность управляющих импульсов вплоть до их полного исчезновения. Это повлечет обесточивание контроллера TL4949 и драйвера IR2110 и блок питания просто отключится.
Поэтому данный блок питания без нагрузки отрегулировать нельзя. Для регулировки в качестве нагрузки следует все силоывые напряжения нагрузить резисторами мощностью 2 Вт и сопротивлением 4,7к…6,8к. При выходном напряжении 60…90 В это будет имитировать ток покоя усилителй мощности. При более низком выходном напряжении сопротивление следует немного уменьшить.
Почему мощность ограничена 2000 Вт и что можно сделать для увеличения мощности можно почитать тут.
Как за час сделать импульсный блок питания из сгоревшей лампочки?
/ru/smps/
Очень похоже на квазирезонансный полумост из второго файла по теме.
Близкие темы.
Как намотать импульсный трансформатор для сетевого блока питания?
Как разобрать энергосберегающую лампу (КЛЛ)?
Энергосберегающие лампы “Vitoone” – технические данные и схема.
Схема и техническая информация по энергосберегающим лампам Osram.
Оглавление статьи.
Вступление.
Отличие схемы КЛЛ от импульсного БП.
Какой мощности блок питания можно изготовить из КЛЛ?
Импульсный трансформатор для блока питания.
Ёмкость входного фильтра и пульсации напряжения.
Блок питания мощностю 20 Ватт.

Блок питания мощностью 100 ватт
Выпрямитель.
Как правильно подключить импульсный блок питания к сети?
Как наладить импульсный блок питания?
Каково назначение элементов схемы импульсного блока питания?
Вступление.
В настоящее время получили широкое распространение Компактные Люминесцентные Лампы (КЛЛ). Для уменьшения размеров балластного дросселя в них используется схема высокочастотного преобразователя напряжения, которая позволяет значительно снизить размер дросселя.
В случае выхода из строя электронного балласта, его можно легко отремонтировать. Но, когда выходит из строя сама колба, то лампочку обычно выбрасывают.
Однако электронный балласт такой лампочки, это почти готовый импульсный Блок Питания (БП). Единственное, чем схема электронного балласта отличается от настоящего импульсного БП, это отсутствием разделительного трансформатора и выпрямителя, если он необходим. /
/
В то же время, современные радиолюбители испытывают большие трудности при поиске силовых трансформаторов для питания своих самоделок. Если даже трансформатор найден, то его перемотка требует использования большого количества медного провода, да и массо-габаритные параметры изделий, собранных на основе силовых трансформаторов не радуют. А ведь в подавляющем большинстве случаев силовой трансформатор можно заменить импульсным блоком питания. Если же для этих целей использовать балласт от неисправных КЛЛ, то экономия составит значительную сумму, особенно, если речь идёт о трансформаторах на 100 Ватт и больше.
Вернуться наверх к меню
Отличие схемы КЛЛ от импульсного БП.
Это одна из самых распространённых электрических схем энергосберегающих ламп. Для предобразования схемы КЛЛ в импульсный блок питания достаточно установить всего одну перемычку между точками А – А’ и добавить импульсный трансформатор с выпрямителем. Красным цветом отмечены элементы, которые можно удалить.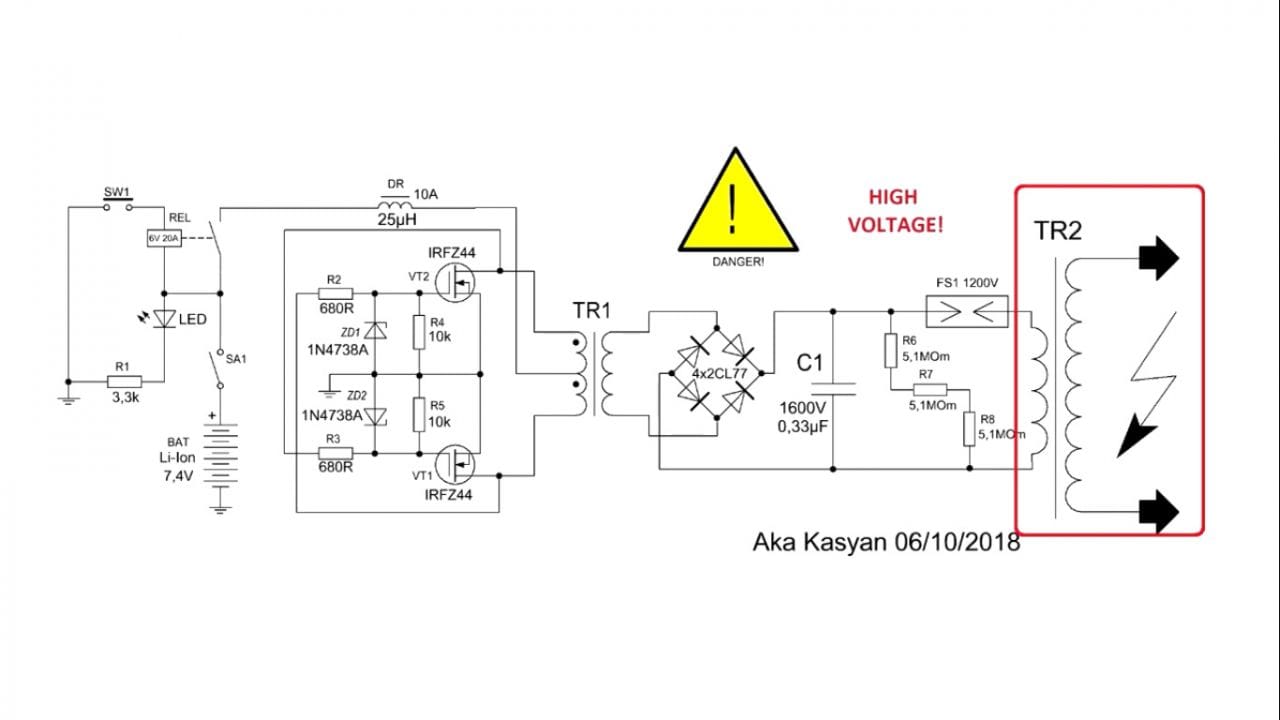
А это уже законченная схема импульсного блока питания, собранная на основе КЛЛ с использованием дополнительного импульсного трансформатора.
Для упрощения, удалена люминесцентная лампа и несколько деталей, которые были заменены перемычкой.
Как видите, схема КЛЛ не требует больших изменений. Красным цветом отмечены дополнительные элементы, привнесённые в схему.
Вернуться наверх к меню
Какой мощности блок питания можно изготовить из КЛЛ?
Мощность блока питания ограничивается габаритной мощностью импульсного трансформатора, максимально допустимым током ключевых транзисторов и величиной радиатора охлаждения, если он используется.
Блок питания небольшой мощности можно построить, намотав вторичную обмотку прямо на каркас уже имеющегося дросселя.
В случае если окно дросселя не позволяет намотать вторичную обмотку или если требуется построить блок питания мощностью, значительно превышающей мощность КЛЛ, то понадобится дополнительный импульсный трансформатор.
Если требуется получить блок питания мощностью свыше 100 Ватт, а используется балласт от лампы на 20-30 Ватт, то, скорее всего, придётся внести небольшие изменения и в схему электронного балласта.
В частности, может понадобиться установить более мощные диоды VD1-VD4 во входной мостовой выпрямитель и перемотать входной дроссель L0 более толстым проводом. Если коэффициент усиления транзисторов по току окажется недостаточным, то придётся увеличить базовый ток транзисторов, уменьшив номиналы резисторов R5, R6. Кроме этого придётся увеличить мощность резисторов в базовых и эмиттерных цепях.
Если частота генерации окажется не очень высокой, то возможно придётся увеличить емкость разделительных конденсаторов C4, C6.
Вернуться наверх к меню
Импульсный трансформатор для блока питания.
Особенностью полумостовых импульсных блоков питания с самовозбуждением является способность адаптироваться к параметрам используемого трансформатора.![]() А тот факт, что цепь обратной связи не будет проходить через наш самодельный трансформатор и вовсе упрощает задачу расчёта трансформатора и наладки блока. Блоки питания, собранные по этим схемам прощают ошибки в расчётах до 150% и выше. Проверено на практике.
А тот факт, что цепь обратной связи не будет проходить через наш самодельный трансформатор и вовсе упрощает задачу расчёта трансформатора и наладки блока. Блоки питания, собранные по этим схемам прощают ошибки в расчётах до 150% и выше. Проверено на практике.
Здесь подробно рассказано, как произвести самые простые расчёты импульсного трансформатора, а так же, как его правильно намотать… чтобы не пришлось подсчитывать витки.
Не пугайтесь! Намотать импульсный трансформатор можно в течение просмотра одного фильма или даже быстрее, если Вы собираетесь выполнять эту монотонную работу сосредоточенно.
Вернуться наверх к меню
Ёмкость входного фильтра и пульсации напряжения.
Во входных фильтрах электронных балластов, из-за экономии места, используются конденсаторы небольшой ёмкости, от которых зависит величина пульсаций напряжения с частотой 100 Hz.
Чтобы снизить уровень пульсаций напряжения на выходе БП, нужно увеличить ёмкость конденсатора входного фильтра. Желательно, чтобы на каждый Ватт мощности БП приходилось по одной микрофараде или около того. Увеличение ёмкости С0 повлечёт за собой рост пикового тока, протекающего через диоды выпрямителя в момент включения БП. Чтобы ограничить этот ток, необходим резистор R0. Но, мощность исходного резистора КЛЛ мала для таких токов и его следует заменить на более мощный.
Желательно, чтобы на каждый Ватт мощности БП приходилось по одной микрофараде или около того. Увеличение ёмкости С0 повлечёт за собой рост пикового тока, протекающего через диоды выпрямителя в момент включения БП. Чтобы ограничить этот ток, необходим резистор R0. Но, мощность исходного резистора КЛЛ мала для таких токов и его следует заменить на более мощный.
Если требуется построить компактный блок питания, то можно использовать электролитические конденсаторы, применяющиеся в лампах вспышках плёночных «мальниц». Например, в одноразовых фотоаппаратах Kodak установлены миниатюрные конденсаторы без опознавательных знаков, но их ёмкость аж целых 100µF при напряжении 350 Вольт.
Вернуться наверх к меню
Блок питания мощностью 20 Ватт.
Блок питания мощностью, близкой к мощности исходной КЛЛ, можно собрать, даже не мотая отдельный трансформатор. Если у оригинального дросселя есть достаточно свободного места в окне магнитопровода, то можно намотать пару десятков витков провода и получить, например, блок питания для зарядного устройства или небольшого усилителя мощности.
На картинке видно, что поверх имеющейся обмотки был намотан один слой изолированного провода. Я использовал провод МГТФ (многожильный провод во фторопластовой изоляции). Однако таким способом можно получить мощность всего в несколько Ватт, так как большую часть окна будет занимать изоляция провода, а сечение самой меди будет невелико.
Если требуется бо’льшая мощность, то можно использовать обыкновенный медный лакированный обмоточный провод.
Внимание! Оригинальная обмотка дросселя находится под напряжением сети! При описанной выше доработке, обязательно побеспокойтесь о надёжной межобмоточной изоляции, особенно, если вторичная обмотка мотается обычным лакированным обмоточным проводом. Даже если первичная обмотка покрыта синтетической защитной плёнкой, дополнительная бумажная прокладка необходима!
Как видите, обмотка дросселя покрыта синтетической плёнкой, хотя часто обмотка этих дросселей вообще ничем не защищена.
Наматываем поверх плёнки два слоя электрокартона толщиной 0,05мм или один слой толщиной 0,1мм. Если нет электрокартона, используем любую подходящую по толщине бумагу.
Поверх изолирующей прокладки мотаем вторичную обмотку будущего трансформатора. Сечение провода следует выбирать максимально возможное. Количество витков подбирается экспериментальным путём, благо их будет немного.
Мне, таким образом, удалось получить мощность на нагрузке 20 Ватт при температуре трансформатора 60ºC, а транзисторов – 42ºC. Получить ещё большую мощность, при разумной температуре трансформатора, не позволила слишком малая площадь окна магнитопровода и обусловленное этим сечение провода.
На картинке действующая модель БП.
Мощность, подводимая к нагрузке – 20 Ватт. Частота автоколебаний без нагрузки – 26 кГц. Частота автоколебаний при максимальной нагрузке – 32 кГц Температура трансформатора – 60ºС Температура транзисторов – 42ºС
Вернуться наверх к меню
Блок питания мощностью 100 Ватт.
Для увеличения мощности блока питания пришлось намотать импульсный трансформатор TV2. Кроме этого, я увеличил ёмкость конденсатора фильтра сетевого напряжения C0 до 100µF.
Так как КПД блока питания вовсе не равен 100%, пришлось прикрутить к транзисторам какие-то радиаторы.
Ведь если КПД блока будет даже 90%, рассеять 10 Ватт мощности всё равно придётся.
Мне не повезло, в моём электроном балласте были установлены транзисторы 13003 поз.1 такой конструкции, которая, видимо, рассчитана на крепление к радиатору при помощи фасонных пружин. Эти транзисторы не нуждаются в прокладках, так как не снабжены металлической площадкой, но и тепло отдают намного хуже. Я их заменил транзисторами 13007 поз.2 с отверстиями, чтобы их можно было прикрутить к радиаторам обычными винтами. Кроме того, 13007 имеют в несколько раз бо’льшие предельно-допустимые токи.
Если пожелаете, можете смело прикручивать оба транзистора на один радиатор. Я проверил, это работает.
Только, корпуса обоих транзисторов должны быть изолированы от корпуса радиатора, даже если радиатор находится внутри корпуса электронного устройства.
Крепление удобно осуществлять винтами М2,5, на которые нужно предварительно надеть изоляционные шайбы и отрезки изоляционной трубки (кембрика). Допускается использование теплопроводной пасты КПТ-8, так как она не проводит ток.
Внимание! Транзисторы находятся под напряжением сети, поэтому изоляционные прокладки должны обеспечивать условия электробезопасности!
На чертеже изображено соединение транзистора с радиатором охлаждения в разрезе.
Винт М2,5.
Шайба М2,5.
Шайба изоляционная М2,5 – стеклотекстолит, текстолит, гетинакс.
Корпус транзистора.
Прокладка – отрезок трубки (кембрика).
Прокладка – слюда, керамика, фторопласт и т.д.
Радиатор охлаждения.
А это действующий стоваттный импульсный блок питания.
Резисторы эквивалента нагрузки помещены в воду, так как их мощность недостаточна.
Мощность, выделяемая на нагрузке – 100 Ватт.
Частота автоколебаний при максимальной нагрузке – 90 кГц.
Частота автоколебаний без нагрузки – 28,5 кГц.
Температура транзисторов – 75ºC.
Площадь радиаторов каждого транзистора – 27см².
Температура дросселя TV1 – 45ºC.
TV2 – 2000НМ (Ø28 х Ø16 х 9мм)
Вернуться наверх к меню
Выпрямитель.
Все вторичные выпрямители полумостового импульсного блока питания должны быть обязательно двухполупериодным. Если не соблюсти это условие, то магинтопровод может войти в насыщение.
Существуют две широко распространённые схемы двухполупериодных выпрямителей.
1. Мостовая схема.
2. Схема с нулевой точкой.
Мостовая схема позволяет сэкономить метр провода, но рассеивает в два раза больше энергии на диодах.
Схема с нулевой точкой более экономична, но требует наличия двух совершенно симметричных вторичных обмоток. Асимметрия по количеству витков или расположению может привести к насыщению магнитопровода.
Однако именно схемы с нулевой точкой используются, когда требуется получить большие токи при малом выходном напряжении. Тогда, для дополнительной минимизации потерь, вместо обычных кремниевых диодов, используют диоды Шоттки, на которых падение напряжения в два-три раза меньше.
Пример.
Выпрямители компьютерных блоков питания выполнены по схеме с нулевой точкой. При отдаваемой в нагрузку мощности 100 Ватт и напряжении 5 Вольт даже на диодах Шоттки может рассеяться 8 Ват.
100 / 5 * 0,4 = 8(Ватт)
Если же применить мостовой выпрямитель, да ещё и обычные диоды, то рассеиваемая на диодах мощность может достигнуть 32 Ватт или даже больше.
100 / 5 * 0,8 * 2 = 32(Ватт).
Обратите внимание на это, когда будете проектировать блок питания, чтобы потом не искать, куда исчезла половина мощности.
В низковольтных выпрямителях лучше использовать именно схему с нулевой точкой. Тем более что при ручной намотке можно просто намотать обмотку в два провода. Кроме этого, мощные импульсные диоды недёшевы.
Вернуться наверх к меню
Расчет дросселя для импульсного блока питания
При повторении импульсных вторичных источников питания и стабилизаторов напряжения или самостоятельной их разработке радиолюбители испытывают трудности при подборе магнито-проводов и расчете индуктивных элементов устройств. Публикуемая статья может помочь в решении таких задач.
В однотактных импульсных источниках питания и стабилизаторах напряжения важнейшим элементом является дроссель или импульсный трансформатор, в котором происходит накопление энергии. Обычно их наматывают на броневых или Ш-образных феррито-вых магнитопроводах с зазором или кольцах из Мо-пермаллоя МП140 или МП160 [1 — 4]. Магнитопрово-ды из прессованного пермаллоя (Mo-пермаллоя) достаточно дороги и дефицитны. В то же время в большинстве случаев индуктивные элементы таких устройств можно выполнить на широко распространенных кольцах из феррита с проницаемостью 600. . .6000. если в них ввести зазор.
Индуктивность L катушки, намотанной на кольцевом магнитопроводе, как известно, можно найти по формуле [1]
где AL — так называемый коэффициент индуктивности, N — число витков катушки. Коэффициент AL соответствует индуктивности катушки в один виток и обычно приводится в справочных данных конкретных магнитопроводов [1 — 4], а для кольцевых магнитопроводов может быть легко рассчитан;
где μo = 1,257-10 -3 мкГн/мм — абсолютная магнитная проницаемость вакуума, μэфф — эффективная начальная магнитная проницаемость материала магнитопровода. Sэфф — эффективная площадь сечения магнитопровода в мм 2 , l эфф — эффективная длина магнито-провода в мм.
Зная величину AL, нетрудно определить число витков катушки для получения необходимой индуктивности:
Эффективное сечение и длина магнитопровода несколько меньше определяемых по его геометрическим параметрам и обычно приводятся в справочной литературе. В табл. 1 в первых пяти столбцах приведены геометрические размеры, эффективные сечение и длина l эфф Для ферритовых колец стандартного ряда с внешним диаметром D от 6 до 50 мм, внутренним d и высотой h [1].
В этой же таблице приведены расчетные значения площади окна магнитопроводов SОKH, периметра сечения р и коэффициента индуктивности AL для μэфф = 50. Данные позволяют рассчитать индуктивность любой катушки, намотанной на кольцевом магнитопроводе с табличными геометрическими размерами. Если μэфф используемого кольца отличается от 50, значение AL необходимо пропорционально изменить, например, для μэфф = 2000 коэффициент AL следует увеличить в 40 раз. Следует иметь ввиду, что значения μэфф , Sэфф и l эфф определяются с большой погрешностью, и в справочниках для кольцевых магнитопроводов указан обычно двукратный разброс значений АL[1]. Поэтому величины AL, взятые из Таблицы 1, следует принимать как ориентировочные и уточнять их при необходимости более точного расчета по результатам эксперимента.
Для этого следует намотать на магнитопроводе пробную катушку, например, из десяти витков и измерить ее индуктивность LПР. Здесь себя хорошо зарекомендовал прибор, описанный в [5]. Разделив LПР на 100 = 10 2 , определим значение AL. Расчетное значение N следует увеличить на несколько витков (до N1), по результату измерения L1 уточнить необходимое число витков , и отмотать лишние витки.
Описанным выше образом можно рассчитать индуктивность катушки или необходимое число витков. Однако, как только речь заходит о дросселях для импульсных источников питания, сразу возникает вопрос, какой ток может выдержать дроссель без насыщения магнитопровода?
Магнитная индукция В в магнитопроводе при токе I может быть рассчитана по формуле
Максимально допустимая индукция Втах для материалов магнитопроводов приводится в справочных данных и лежит в пределах 0, 25. ..0,5 Тл. Из этой формулы несложно получить выражение для максимального тока дросселя:
Если в нее подставить формулу для определения числа витков по заданной индуктивности, получим
где /эфф = Sэфф lэфф— эффективный объем магнитопровода. Нетрудно видеть, что чем выше μэфф, тем меньший ток может пропустить дроссель при тех же геометрических размерах магнитопровода и заданной индуктивности. Более или менее приемлемые результаты при изготовлении дросселей для ИВЭП получаются при μэфф = 30. 50. Именно поэтому в Таблице 1 значение коэффициента AL приведено для μэфф = 50. В той же таблице приведено максимальное значение тока lmax через дроссель с одним витком при Вmax = 0,3 Тл. Для определения допустимого тока реального дросселя достаточно табличное значение lmax разделить на число витков N.
Однако в радиолюбительской практике более доступны кольцевые магнитопроводы с большими значениями эффективной магнитной проницаемости μэфф = 600. 6000. Понизить эффективную магнитную проницаемость таких магнитопроводов можно введением зазора, при этом
где μнач — начальная магнитная проницаемость материала магнитопровода, Δэфф — эффективная ширина зазора. При реальной ширине зазора μэфф = lэфф/Δэфф. Для того, чтобы снизить μэфф примерно до 50. . . 100 (это значение исходя из опыта расчета и изготовления дросселей близко к оптимальному), эффективная ширина зазора должна составлять Δэфф = lэфф/(50. 100) независимо от начальной магнитной проницаемости магнитопровода.
Если в вышеприведенную формулу для расчета AL подставить значение μэфф для магнитопровода с зазором,получим
Еще более простой получается формула для максимального тока через дроссель
т. е. допустимый ток определяется только эффективным зазором и числом витков.
Почти все приведенные выше формулы уже были опубликованы в журнале «Схемотехника» [4], однако ни в одной из известных автору статьи публикаций не отмечено, что эффективная ширина зазора, которую надо применять в расчетах, меньше геометрической. Это различие возникает из-за того, что магнитное поле, существующее рядом с зазором (Рис. 1), шунтирует зазор и уменьшает его эффективную ширину. Для того, чтобы рассчитать влияние этого поля, можно обратиться к аналогии между магнитным и электрическим полями. Воспользуемся формулой для емкости конденсатора из двух цилиндров с близко расположенными торцами [6]:
где С — емкость конденсатора в сантиметрах, D— диаметр цилиндров, b — их высота, d — зазор между их торцами.
Нетрудно заметить, что первое слагаемое соответствует емкости зазора между цилиндрами, а второе— емкости, вносимой боковыми поверхностями цилиндров. Будем считать, что высота цилиндров равна их удвоенному диаметру b = 2D. Это означает, что мы учтем только емкость ближайшей к зазору части боковой поверхности цилиндров, пренебрегая дальней. Расчеты при длине цилиндров в 3 или 4 диаметра дают практически тот же результат.
Для того, чтобы в дальнейшем перейти от емкости между цилиндрами к емкости между прямоугольными брусками (а это по форме ближе к сечению ферритового кольца), будем считать, что емкость, вносимая боковыми поверхностями, пропорциональна периметру зазора, и выразим в этой формуле диаметр цилиндров через периметр р их кругового сечения:
высота цилиндров b = 2D = 2р/тг.
Если в формулу для емкости подставить эти выражения, можно определить из нее отношение полной емкости к емкости между торцами в функции от отношения зазора к периметру цилиндров β = d/b. Формула эта, однако, получается довольно громоздкой и неудобной для применения.
Обозначим буквой а отношение эффективного зазора, обеспечивающего без емкости боковых поверхностей ту же емкость, что и емкость между торцами с учетом емкости боковых поверхностей, к геометрическому. На Рис. 2 приведена расчетная зависимость а от β. Из подобия уравнений, описывающих электрическое и магнитное поле, следует, что аналогично выглядит и зависимость отношения эффективного магнитного зазора к геометрическому от отношения геометрического магнитного зазора к периметру.
Из графика на Рис. 2 следует, что эффективная ширина зазора может существенно отличаться от геометрической. В реальном диапазоне β составляет от 0,01 до 0,1 эффективная ширина зазора меньше геометрической в 1,26. 2,66 раза.
В Таблице 1 приведены значения AL для кольцевых магнитопроводов с четырьмя различными зазорами, рассчитанные с учетом отличия эффективного зазора от геометрического.
Вышесказанное позволяет сделать вывод, что необходимые число витков и зазор практически не зависят от начальной магнитной проницаемости материала магнитопровода, и поэтому можно применить ферриты с любой проницаемостью, большей 600. Для любого имеющегося кольца с табличным зазором по значению AL нетрудно вычислить индуктивность или необходимое число витков и рассчитав β = Δ/р, по графику (рис. 2) определить значение а = Δэфф /р и Δэфф = ap. По найденному значению Δэфф и приведенной ранее формуле можно найти максимальный ток, не вызывающий насыщения сердечника.
Однако существует еще одно обстоятельство, влияющее на выбор магнитопровода — возможность намотки на него требуемого числа витков проводом соответствующего сечения. Необходимая площадь окна кольца составляет
Sокн = NSпров/Кзап
где Sпров — сечение провода, а kзап — коэффициент заполнения окна. Расчет Sпров производят по формуле Sпров = l/j . где j — допустимая плотность тока. Типовое значение kзап по меди составляет 0,3, а для j при начальном расчете принимают значение 2,5 А/мм2.
Подставив в формулу для расчета площади окна выражения для N и АL, получим следующую формулу:
I 2 L = (Sокнjkзап) 2 μSэфф/Δэфф
Подобное выражение можно получить и из формулы для максимального тока, который можно пропустить через дроссель без насыщения сердечника:
I 2 L = Bmax 2 Sэфф lэфф ( μ μэфф )
Однозначного расчета конструктивных параметров дросселя по заданной индуктивности и току не существует. Однако при подборе кольца и определении данных обмотки могут помочь последние восемь колонок табл. 1 . В них приведены максимальные значения произведения l 2 L по насыщению и по заполнению, рассчитанные по приведенным выше формулам для Вmах = 0,3 Тл, kзan = 0,3, j = 2,5 А/мм 2 и четырех значений зазора.
Подбор колец и расчет конструктивных параметров дросселей продемонстрируем на двух примерах.
Пусть необходим дроссель индуктивностью 22 мкГн на рабочий ток 1,2 А. Для него значение l 2 L = 1,22х22 = 31,68. Среди колец минимального диаметра первым почти подходит кольцо К10x6x4,5. При введении в него зазора 0,25 мм имеем возможность намотать дроссель с большим запасом по току (Таблица 1, колонка «нас»), но с некоторым превышением плотности тока относительно 2,5 А/мм 2 (колонка «зап.»).
Определим параметры дросселя при зазоре 0,25 мм. Для него коэффициент индуктивности по Таблице 1 составит AL = 0,064, необходимое число витков
(округляем до 19), допустимый ток Для I = 1,2 А при j = 2,5 А/мм2 необходим провод сечением
Sпров = I/j = 1,2/2,5 = 0,48mm 2
При коэффициенте заполнения kзап = 0,3 необходимая площадь окна составит
Площадь окна по Таблице 1 составляет 28,3 мм 2 , что несколько меньше. Необходимо за счет увеличения плотности тока уменьшить сечение провода до
Sпров = Sокн kзап/N = 28,3×0,3/19 = 0,446 мм 2
Плотность тока составит j = I/Sпров = 1,2/0,446 = =2,68 А/мм 2 , что вполне допустимо. Диаметр провода указанного сечения (по меди) можно рассчитать по формуле:
Пусть необходим дроссель 88 мкГн на ток 1,25 А. Для него l 2 L = 137,5. Дроссель можно намотать на кольце К12x6x4,5 с тем же зазором, при этом насыщения магнитопровода происходить не будет, но плотность тока существенно превысит норму. Поэтому необходимо перейти к кольцу большего размера. В распоряжении автора были кольца К12x8x3 из феррита М4000НМ. На одном кольце невозможно намотать необходимый дроссель, ни по насыщению сердечника, ни по заполнению окна. Можно сложить два кольца вместе. В этом случае эффективное сечение магнитопровода увеличивается в два раза, а допустимые значения l 2 L вырастут по насыщению несколько более, а по заполнению несколько менее, чем в два раза. Поэтому необходимый дроссель при геометрическом зазоре 0,25 мм можно намотать с запасом по току насыщения и с небольшим превышением плотности тока.
Только табличными сведениями теперь не обойтись, необходим полный расчет. Для двух колец периметр сечения (при зазоре 0,25 мм):
р = D-d+4xh = 12-8+4×3 = 16 мм,
β=Δ/р = 0,25/16 = 0,0156.
По графику на Рис. 2 находим а = 0,73, откуда эффективный зазор
Δэфф = Δа = 0,25×0,73 = 0,183 мм.
Найденное значение
AL= μSэфф/Δэфф = 1,257х10 -3 х2х5,92/0,183 = 0,081
Необходимое число витков
округляем в большую сторону до 33 витков. Максимальный ток через дроссель
lmax = 240 Δэфф /N = 240×0,183/33 = 1,33 А.
Максимальное сечение провода
Sпров = Sокн kзап/N = 50,3×0,3/33 = 0,457 мм 2 ,
что соответствует плотности тока 1,25/0,457 = 2,74 А/мм 2 . Сечению Sпров = 0,457 мм 2 соответствует диаметр:
Иногда удобнее ввести два одинаковых зазора. В этом случае табличное значение AL для половинного зазора следует уменьшить в два раза, а табличное значение I 2 L для половинного зазора — удвоить.
Технология введения зазора такова. Небольшое кольцо перед намоткой разломить на две части, надпилив его надфилем, лучше алмазным. Половинки склеивают между собой эпоксидным клеем с наполнителем, в качестве которого удобно использовать тальк. При склеивании в один из зазоров или в оба на часть глубины вводят прокладку из гетинакса, текстолита или нескольких слоев бумаги. Можно считать, что толщина одного листа бумаги для ксероксов и лазерных принтеров составляет 0,1 мм. Для сохранения формы кольца в процессе полимеризации клея оно должно лежать на обрезке органического стекла, от которого затем легко отделяется при изгибе этого обрезка. Перед намоткой острые грани колец следует тщательно скруглить небольшим наждачным камнем.
У большого кольца зазор можно также выполнить ножовкой с алмазным полотном, однако его ширина при этом однозначно определяется толщиной полотна. В такой зазор для сохранения прочности кольца следует вклеить прокладку из жесткого диэлектрика.
Для экспериментальной проверки тока насыщения дросселей автором была изготовлена приставка к осциллографу, схема которой приведена на Рис. 3. Устройство представляет собой упрощенный вариант обратноходового преобразователя.
На микросхеме DD1 собран генератор импульсов положительной полярности длительностью, регулируемой в пределах 10. 300 мкс с периодом повторения около 10 мс. Импульсы с его выхода поданы на затвор мощного, но низковольтного и относительно недорогого полевого транзистора VT2. Транзистор открывается и через проверяемую катушку индуктивности L1 начинает течь линейно нарастающий ток. Когда импульс заканчивается, накопленная энергия передается через диод VD2 в нагрузку, которой служат стабилитроны VD3 и VD4. Напряжение с резистора R7, пропорциональное току через катушку L1, подается на осциллограф. Для синхронизации осциллографа лучше использовать сигнал с выхода DD1.4. Если ток превысит 6А, откроется транзистор VT1 и оборвет формирование импульса. Пока сердечник катушки не входит в насыщение, зависимость тока от времени, как указывалось выше, носит линейный характер. При плавном увеличении длительности импульсов и подходе максимального тока через дроссель к току насыщения на экране осциллографа хорошо видно резкое отклонение зависимости от линейной. Источник напряжением 20 В должен допускать выходной ток не менее 1 А. Для упрощения пользования приставкой можно цепь +6 В питать от цепи +20 В через микросхемный стабилизатор КР145ЕН5Б(Г), либо КР1157ЕН6 с любыми суффиксами (7806 или 78L06). Экспериментальная проверка изготовленных дросселей подтвердила точность расчета необходимого числа витков и тока насыщения порядка ±10 %, что можно считать неплохим результатом, учитывая ошибки установки ширины зазора и множество допущений при выводе формул
Литература:
1. И. Н. Сидоров, А. А. Христинин, С. В. Скорняков. Малогабаритные магнитопроводы и сердечники. Справочник.— М.: Радио и связь, 1989, с. .384,
2. А. Миронов. Магнитные материалы и магнитопроводы для импульсных источников питания.— Радио, 2000, №6, с. 53, 54.
3. Ферритовые магнитопроводы серии RM фирмы EPCOS. — Радио, 2001, №3, с. 49—51, №10, с. 48—50.
4. А. Кузнецов. Трансформаторы и дроссели для импульсных источников питания. — Схемотехника, 2000, №1, с. 30—33, №2, с. 48, 49, 2001, №1, с. 32—34.
5. С. Бирюков. Цифровой измеритель RCL. — Радио, 1996, №3, с. 38—41, №7, с. 62, 1997, №7, с. 32, 1998, №5, с. 63, 2001, №5, с. 44.
6. Г. Г. Гинкин. Справочник по радиотехнике. Изд. 4-е, переработанное. — М.: Госэнергоиздат, 1948, с. 816.
При повторении импульсных вторичных источников питания и стабилизаторов напряжения или самостоятельной их разработке радиолюбители испытывают трудности при подборе магнито-проводов и расчете индуктивных элементов устройств. Публикуемая статья может помочь в решении таких задач.
В однотактных импульсных источниках питания и стабилизаторах напряжения важнейшим элементом является дроссель или импульсный трансформатор, в котором происходит накопление энергии. Обычно их наматывают на броневых или Ш-образных феррито-вых магнитопроводах с зазором или кольцах из Мо-пермаллоя МП140 или МП160 [1 — 4]. Магнитопрово-ды из прессованного пермаллоя (Mo-пермаллоя) достаточно дороги и дефицитны. В то же время в большинстве случаев индуктивные элементы таких устройств можно выполнить на широко распространенных кольцах из феррита с проницаемостью 600. . .6000. если в них ввести зазор.
Индуктивность L катушки, намотанной на кольцевом магнитопроводе, как известно, можно найти по формуле [1]
где AL — так называемый коэффициент индуктивности, N — число витков катушки. Коэффициент AL соответствует индуктивности катушки в один виток и обычно приводится в справочных данных конкретных магнитопроводов [1 — 4], а для кольцевых магнитопроводов может быть легко рассчитан;
где μo = 1,257-10 -3 мкГн/мм — абсолютная магнитная проницаемость вакуума, μэфф — эффективная начальная магнитная проницаемость материала магнитопровода. Sэфф — эффективная площадь сечения магнитопровода в мм 2 , l эфф — эффективная длина магнито-провода в мм.
Зная величину AL, нетрудно определить число витков катушки для получения необходимой индуктивности:
Эффективное сечение и длина магнитопровода несколько меньше определяемых по его геометрическим параметрам и обычно приводятся в справочной литературе. В табл. 1 в первых пяти столбцах приведены геометрические размеры, эффективные сечение и длина l эфф Для ферритовых колец стандартного ряда с внешним диаметром D от 6 до 50 мм, внутренним d и высотой h [1].
В этой же таблице приведены расчетные значения площади окна магнитопроводов SОKH, периметра сечения р и коэффициента индуктивности AL для μэфф = 50. Данные позволяют рассчитать индуктивность любой катушки, намотанной на кольцевом магнитопроводе с табличными геометрическими размерами. Если μэфф используемого кольца отличается от 50, значение AL необходимо пропорционально изменить, например, для μэфф = 2000 коэффициент AL следует увеличить в 40 раз. Следует иметь ввиду, что значения μэфф , Sэфф и l эфф определяются с большой погрешностью, и в справочниках для кольцевых магнитопроводов указан обычно двукратный разброс значений АL[1]. Поэтому величины AL, взятые из Таблицы 1, следует принимать как ориентировочные и уточнять их при необходимости более точного расчета по результатам эксперимента.
Для этого следует намотать на магнитопроводе пробную катушку, например, из десяти витков и измерить ее индуктивность LПР. Здесь себя хорошо зарекомендовал прибор, описанный в [5]. Разделив LПР на 100 = 10 2 , определим значение AL. Расчетное значение N следует увеличить на несколько витков (до N1), по результату измерения L1 уточнить необходимое число витков , и отмотать лишние витки.
Описанным выше образом можно рассчитать индуктивность катушки или необходимое число витков. Однако, как только речь заходит о дросселях для импульсных источников питания, сразу возникает вопрос, какой ток может выдержать дроссель без насыщения магнитопровода?
Магнитная индукция В в магнитопроводе при токе I может быть рассчитана по формуле
Максимально допустимая индукция Втах для материалов магнитопроводов приводится в справочных данных и лежит в пределах 0, 25. ..0,5 Тл. Из этой формулы несложно получить выражение для максимального тока дросселя:
Если в нее подставить формулу для определения числа витков по заданной индуктивности, получим
где /эфф = Sэфф lэфф— эффективный объем магнитопровода. Нетрудно видеть, что чем выше μэфф, тем меньший ток может пропустить дроссель при тех же геометрических размерах магнитопровода и заданной индуктивности. Более или менее приемлемые результаты при изготовлении дросселей для ИВЭП получаются при μэфф = 30. 50. Именно поэтому в Таблице 1 значение коэффициента AL приведено для μэфф = 50. В той же таблице приведено максимальное значение тока lmax через дроссель с одним витком при Вmax = 0,3 Тл. Для определения допустимого тока реального дросселя достаточно табличное значение lmax разделить на число витков N.
Однако в радиолюбительской практике более доступны кольцевые магнитопроводы с большими значениями эффективной магнитной проницаемости μэфф = 600. 6000. Понизить эффективную магнитную проницаемость таких магнитопроводов можно введением зазора, при этом
где μнач — начальная магнитная проницаемость материала магнитопровода, Δэфф — эффективная ширина зазора. При реальной ширине зазора μэфф = lэфф/Δэфф. Для того, чтобы снизить μэфф примерно до 50. . . 100 (это значение исходя из опыта расчета и изготовления дросселей близко к оптимальному), эффективная ширина зазора должна составлять Δэфф = lэфф/(50. 100) независимо от начальной магнитной проницаемости магнитопровода.
Если в вышеприведенную формулу для расчета AL подставить значение μэфф для магнитопровода с зазором,получим
Еще более простой получается формула для максимального тока через дроссель
т. е. допустимый ток определяется только эффективным зазором и числом витков.
Почти все приведенные выше формулы уже были опубликованы в журнале «Схемотехника» [4], однако ни в одной из известных автору статьи публикаций не отмечено, что эффективная ширина зазора, которую надо применять в расчетах, меньше геометрической. Это различие возникает из-за того, что магнитное поле, существующее рядом с зазором (Рис. 1), шунтирует зазор и уменьшает его эффективную ширину. Для того, чтобы рассчитать влияние этого поля, можно обратиться к аналогии между магнитным и электрическим полями. Воспользуемся формулой для емкости конденсатора из двух цилиндров с близко расположенными торцами [6]:
где С — емкость конденсатора в сантиметрах, D— диаметр цилиндров, b — их высота, d — зазор между их торцами.
Нетрудно заметить, что первое слагаемое соответствует емкости зазора между цилиндрами, а второе— емкости, вносимой боковыми поверхностями цилиндров. Будем считать, что высота цилиндров равна их удвоенному диаметру b = 2D. Это означает, что мы учтем только емкость ближайшей к зазору части боковой поверхности цилиндров, пренебрегая дальней. Расчеты при длине цилиндров в 3 или 4 диаметра дают практически тот же результат.
Для того, чтобы в дальнейшем перейти от емкости между цилиндрами к емкости между прямоугольными брусками (а это по форме ближе к сечению ферритового кольца), будем считать, что емкость, вносимая боковыми поверхностями, пропорциональна периметру зазора, и выразим в этой формуле диаметр цилиндров через периметр р их кругового сечения:
высота цилиндров b = 2D = 2р/тг.
Если в формулу для емкости подставить эти выражения, можно определить из нее отношение полной емкости к емкости между торцами в функции от отношения зазора к периметру цилиндров β = d/b. Формула эта, однако, получается довольно громоздкой и неудобной для применения.
Обозначим буквой а отношение эффективного зазора, обеспечивающего без емкости боковых поверхностей ту же емкость, что и емкость между торцами с учетом емкости боковых поверхностей, к геометрическому. На Рис. 2 приведена расчетная зависимость а от β. Из подобия уравнений, описывающих электрическое и магнитное поле, следует, что аналогично выглядит и зависимость отношения эффективного магнитного зазора к геометрическому от отношения геометрического магнитного зазора к периметру.
Из графика на Рис. 2 следует, что эффективная ширина зазора может существенно отличаться от геометрической. В реальном диапазоне β составляет от 0,01 до 0,1 эффективная ширина зазора меньше геометрической в 1,26. 2,66 раза.
В Таблице 1 приведены значения AL для кольцевых магнитопроводов с четырьмя различными зазорами, рассчитанные с учетом отличия эффективного зазора от геометрического.
Вышесказанное позволяет сделать вывод, что необходимые число витков и зазор практически не зависят от начальной магнитной проницаемости материала магнитопровода, и поэтому можно применить ферриты с любой проницаемостью, большей 600. Для любого имеющегося кольца с табличным зазором по значению AL нетрудно вычислить индуктивность или необходимое число витков и рассчитав β = Δ/р, по графику (рис. 2) определить значение а = Δэфф /р и Δэфф = ap. По найденному значению Δэфф и приведенной ранее формуле можно найти максимальный ток, не вызывающий насыщения сердечника.
Однако существует еще одно обстоятельство, влияющее на выбор магнитопровода — возможность намотки на него требуемого числа витков проводом соответствующего сечения. Необходимая площадь окна кольца составляет
Sокн = NSпров/Кзап
где Sпров — сечение провода, а kзап — коэффициент заполнения окна. Расчет Sпров производят по формуле Sпров = l/j . где j — допустимая плотность тока. Типовое значение kзап по меди составляет 0,3, а для j при начальном расчете принимают значение 2,5 А/мм2.
Подставив в формулу для расчета площади окна выражения для N и АL, получим следующую формулу:
I 2 L = (Sокнjkзап) 2 μSэфф/Δэфф
Подобное выражение можно получить и из формулы для максимального тока, который можно пропустить через дроссель без насыщения сердечника:
I 2 L = Bmax 2 Sэфф lэфф ( μ μэфф )
Однозначного расчета конструктивных параметров дросселя по заданной индуктивности и току не существует. Однако при подборе кольца и определении данных обмотки могут помочь последние восемь колонок табл. 1 . В них приведены максимальные значения произведения l 2 L по насыщению и по заполнению, рассчитанные по приведенным выше формулам для Вmах = 0,3 Тл, kзan = 0,3, j = 2,5 А/мм 2 и четырех значений зазора.
Подбор колец и расчет конструктивных параметров дросселей продемонстрируем на двух примерах.
Пусть необходим дроссель индуктивностью 22 мкГн на рабочий ток 1,2 А. Для него значение l 2 L = 1,22х22 = 31,68. Среди колец минимального диаметра первым почти подходит кольцо К10x6x4,5. При введении в него зазора 0,25 мм имеем возможность намотать дроссель с большим запасом по току (Таблица 1, колонка «нас»), но с некоторым превышением плотности тока относительно 2,5 А/мм 2 (колонка «зап.»).
Определим параметры дросселя при зазоре 0,25 мм. Для него коэффициент индуктивности по Таблице 1 составит AL = 0,064, необходимое число витков
(округляем до 19), допустимый ток Для I = 1,2 А при j = 2,5 А/мм2 необходим провод сечением
Sпров = I/j = 1,2/2,5 = 0,48mm 2
При коэффициенте заполнения kзап = 0,3 необходимая площадь окна составит
Площадь окна по Таблице 1 составляет 28,3 мм 2 , что несколько меньше. Необходимо за счет увеличения плотности тока уменьшить сечение провода до
Sпров = Sокн kзап/N = 28,3×0,3/19 = 0,446 мм 2
Плотность тока составит j = I/Sпров = 1,2/0,446 = =2,68 А/мм 2 , что вполне допустимо. Диаметр провода указанного сечения (по меди) можно рассчитать по формуле:
Пусть необходим дроссель 88 мкГн на ток 1,25 А. Для него l 2 L = 137,5. Дроссель можно намотать на кольце К12x6x4,5 с тем же зазором, при этом насыщения магнитопровода происходить не будет, но плотность тока существенно превысит норму. Поэтому необходимо перейти к кольцу большего размера. В распоряжении автора были кольца К12x8x3 из феррита М4000НМ. На одном кольце невозможно намотать необходимый дроссель, ни по насыщению сердечника, ни по заполнению окна. Можно сложить два кольца вместе. В этом случае эффективное сечение магнитопровода увеличивается в два раза, а допустимые значения l 2 L вырастут по насыщению несколько более, а по заполнению несколько менее, чем в два раза. Поэтому необходимый дроссель при геометрическом зазоре 0,25 мм можно намотать с запасом по току насыщения и с небольшим превышением плотности тока.
Только табличными сведениями теперь не обойтись, необходим полный расчет. Для двух колец периметр сечения (при зазоре 0,25 мм):
р = D-d+4xh = 12-8+4×3 = 16 мм,
β=Δ/р = 0,25/16 = 0,0156.
По графику на Рис. 2 находим а = 0,73, откуда эффективный зазор
Δэфф = Δа = 0,25×0,73 = 0,183 мм.
Найденное значение
AL= μSэфф/Δэфф = 1,257х10 -3 х2х5,92/0,183 = 0,081
Необходимое число витков
округляем в большую сторону до 33 витков. Максимальный ток через дроссель
lmax = 240 Δэфф /N = 240×0,183/33 = 1,33 А.
Максимальное сечение провода
Sпров = Sокн kзап/N = 50,3×0,3/33 = 0,457 мм 2 ,
что соответствует плотности тока 1,25/0,457 = 2,74 А/мм 2 . Сечению Sпров = 0,457 мм 2 соответствует диаметр:
Иногда удобнее ввести два одинаковых зазора. В этом случае табличное значение AL для половинного зазора следует уменьшить в два раза, а табличное значение I 2 L для половинного зазора — удвоить.
Технология введения зазора такова. Небольшое кольцо перед намоткой разломить на две части, надпилив его надфилем, лучше алмазным. Половинки склеивают между собой эпоксидным клеем с наполнителем, в качестве которого удобно использовать тальк. При склеивании в один из зазоров или в оба на часть глубины вводят прокладку из гетинакса, текстолита или нескольких слоев бумаги. Можно считать, что толщина одного листа бумаги для ксероксов и лазерных принтеров составляет 0,1 мм. Для сохранения формы кольца в процессе полимеризации клея оно должно лежать на обрезке органического стекла, от которого затем легко отделяется при изгибе этого обрезка. Перед намоткой острые грани колец следует тщательно скруглить небольшим наждачным камнем.
У большого кольца зазор можно также выполнить ножовкой с алмазным полотном, однако его ширина при этом однозначно определяется толщиной полотна. В такой зазор для сохранения прочности кольца следует вклеить прокладку из жесткого диэлектрика.
Для экспериментальной проверки тока насыщения дросселей автором была изготовлена приставка к осциллографу, схема которой приведена на Рис. 3. Устройство представляет собой упрощенный вариант обратноходового преобразователя.
На микросхеме DD1 собран генератор импульсов положительной полярности длительностью, регулируемой в пределах 10. 300 мкс с периодом повторения около 10 мс. Импульсы с его выхода поданы на затвор мощного, но низковольтного и относительно недорогого полевого транзистора VT2. Транзистор открывается и через проверяемую катушку индуктивности L1 начинает течь линейно нарастающий ток. Когда импульс заканчивается, накопленная энергия передается через диод VD2 в нагрузку, которой служат стабилитроны VD3 и VD4. Напряжение с резистора R7, пропорциональное току через катушку L1, подается на осциллограф. Для синхронизации осциллографа лучше использовать сигнал с выхода DD1.4. Если ток превысит 6А, откроется транзистор VT1 и оборвет формирование импульса. Пока сердечник катушки не входит в насыщение, зависимость тока от времени, как указывалось выше, носит линейный характер. При плавном увеличении длительности импульсов и подходе максимального тока через дроссель к току насыщения на экране осциллографа хорошо видно резкое отклонение зависимости от линейной. Источник напряжением 20 В должен допускать выходной ток не менее 1 А. Для упрощения пользования приставкой можно цепь +6 В питать от цепи +20 В через микросхемный стабилизатор КР145ЕН5Б(Г), либо КР1157ЕН6 с любыми суффиксами (7806 или 78L06). Экспериментальная проверка изготовленных дросселей подтвердила точность расчета необходимого числа витков и тока насыщения порядка ±10 %, что можно считать неплохим результатом, учитывая ошибки установки ширины зазора и множество допущений при выводе формул
Литература:
1. И. Н. Сидоров, А. А. Христинин, С. В. Скорняков. Малогабаритные магнитопроводы и сердечники. Справочник.— М.: Радио и связь, 1989, с. .384,
2. А. Миронов. Магнитные материалы и магнитопроводы для импульсных источников питания.— Радио, 2000, №6, с. 53, 54.
3. Ферритовые магнитопроводы серии RM фирмы EPCOS. — Радио, 2001, №3, с. 49—51, №10, с. 48—50.
4. А. Кузнецов. Трансформаторы и дроссели для импульсных источников питания. — Схемотехника, 2000, №1, с. 30—33, №2, с. 48, 49, 2001, №1, с. 32—34.
5. С. Бирюков. Цифровой измеритель RCL. — Радио, 1996, №3, с. 38—41, №7, с. 62, 1997, №7, с. 32, 1998, №5, с. 63, 2001, №5, с. 44.
6. Г. Г. Гинкин. Справочник по радиотехнике. Изд. 4-е, переработанное. — М.: Госэнергоиздат, 1948, с. 816.
Очень часто у начинающих радиолюбителей возникает необходимость рассчитать дроссель на ферритовом сердечнике для импульсного источника питания, либо для другой цепи в которой циркулируют значительные токи. При этом, погуглив по запросу «расчет индуктивности на ферритовом кольце», с большой вероятностью он попадет на наш онлайн-калькулятор. Воспользовавшись этим калькулятором или самой программой Coil32 для расчета индуктивности дросселя, радиолюбитель чаще всего приходит к результатам не совпадающим ни со справочной литературой по расчету импульсных силовых цепей, ни с реальностью ( пример обсуждения подобной ситуации на форуме ). Дело может даже закончиться выгоранием транзисторов и прочих мосфетов и проклятиями в адрес разработчиков Coil32. В чем же дело? Давайте разберемся…
Причина кроется в том, что начинающие радиолюбители часто либо не знают, либо имеют упрощенный взгляд на особенности намагничивания феррита. Вот мы взяли сердечник, засунули его в катушку и ее индуктивность возросла на величину относительной магнитной проницаемости сердечника. Верно? Верно, да не совсем! Один только факт, что для описания свойств феррита существует несколько магнитных проницаемостей, говорит, что не все так однозначно. Магнитные свойства феррита наиболее полно описываются семейством так называемых кривых намагничивания, иначе называемых «петля гистерезиса». Как происходит процесс намагничивания/размагничивания феррита, что такое остаточная индукция Br, коэрцитивная сила Hc, индукция насыщения, предельная петля гистерезиса [1] и т.д. уже достаточно подробно описано и вы можете прочитать об этом по ссылкам в конце статьи. Мы же остановимся здесь на том, как меняется магнитная проницаемость сердечника в процессе его перемагничивания, поскольку этот параметр использует для расчетов Coil32. Вот неполный список понятий магнитной проницаемости в котором начинающему радиолюбителю не грех и запутаться:
- Относительная и абсолютная магнитная проницаемость. По сути различаются только множителем µ = 4π*10 -7 ., который реально согласует в системе СИ единицы измерения в электромагнетизме и единицы длины и условно именуется как магнитная проницаемость вакуума или магнитная постоянная.
- В общем случае величина относительной магнитной проницаемости пропорциональна наклону касательной к кривой намагничивания в данной точке. Эта величина называется дифференциальной магнитной проницаемостью. Она не постоянна и динамически меняется при движении по кривой намагничивания.
- Начальная магнитная проницаемость µi характеризуется наклоном начальной кривой намагничивания [0] в начале координат. Обычно эта величина приводится в справочниках.
- Максимальная магнитная проницаемость µmax. При намагничивании феррита его магнитная проницаемость растет, достигая некоторого максимума, а затем начинает уменьшаться. Величина максимальной магнитной проницаемости обычно в разы больше начальной. Также можно найти в справочниках по ферритам.
- Динамическая магнитная проницаемость. Характеризует насколько возрастет индуктивное сопротивление переменному току у катушки, если воздух вокруг нее заменить на наш феррит. Т.е. как раз то, что нас интересует. Если феррит помещен в относительно слабое переменное магнитное поле, не загоняющее его в предельную петлю гистерезиса, то его петлю перемагничивания (частную петлю гистерезиса) можно приближенно представить как эллипс. Тогда с достаточным приближением можно считать, что динамическая магнитная проницаемость характеризуется наклоном большой оси этого эллипса.
- Эффективная магнитная проницаемость. Это величина относится не к самому ферриту, а к сердечнику из него с разомкнутой магнитной цепью.
При слабых полях, без подмагничивания постоянным током (важно!), феррит перемагничивается условно по кривой [3] и в этом случае величина динамической магнитной проницаемости близка к величине начальной магнитной проницаемости феррита. Поэтому в слаботочных цепях с относительно небольшой погрешностью при расчетах можно использовать величину начальной магнитной проницаемости, что и делает наш онлайн калькулятор и программа Coil32.
Другое дело силовой дроссель в импульсной схеме питания. Ферриты широкого применения имеют относительно низкое значение индукции насыщения (около 0.3Т), поэтому в цепи силового ключа дроссель переключается между максимальным значением поля, когда он почти заходит в режим насыщения и нулевым значением поля, когда он размагничивается до величины остаточной индукции (кривая [4]). Как мы видим наклон большой оси эллипса 4 намного меньше чем у эллипса 3. Другими словами магнитная проницаемость сердечника в таком режиме значительно снижается. Ситуация усугубляется если сердечник дросселя кроме того подмагничивается постоянным током (кривая [5]). Предельная петля гистерезиса реального феррита более прямоугольна, чем на нашем схематическом рисунке и, в итоге, динамическая магнитная проницаемость силового дросселя на ферритовом кольце падает до единиц. Будто бы феррита и нет совсем! В итоге, индуктивное сопротивление дросселя падает, ток резко возрастает (что ведет еще к большему уменьшению µ!), ключевой транзистор греется и выходит из строя. А расчеты из Coil32 для такого дросселя дают абсолютно неверный результат. Ведь мы использовали при расчете начальную магнитную проницаемость, а в реальной схеме она на два-три порядка меньше. В такую же ситуацию вы попадете, если измерите относительную магнитную проницаемость кольца методом пробной намотки, ведь прибор, измеряющий индуктивность, также является слаботочным устройством.
Выходом из ситуации является использование ферритового сердечника с разорванной магнитной цепью. В случае ферритового кольца, его приходится ломать пополам и потом склеивать с зазором. Предельная петля гистерезиса такого сердечника становится более пологой [2], остаточная индукция значительно меньше [B’r], эффективная магнитная проницаемость тоже меньше, чем у сердечника без зазора. Однако при этом, кривая перемагничивания [6] показывает, что динамическая магнитная проницаемость у такого дросселя намного выше, чем у аналогичного, но с сердечником без зазора. Реально она имеет величину порядка 50..100 и слабо зависит от величины начальной магнитной проницаемости феррита. Coil32 такой дроссель также не в состоянии правильно рассчитать, поскольку не учитывает немагнитный зазор. Другим выходом из ситуации является применение специальных колец для силовых дросселей из распыленного железа, Iron Powder (это не феррит). Именно такие кольца можно найти в импульсных блоках питания и на материнских платах компьютеров. «Зазор» в таком кольце как бы размазан по всему его объему.
Вывод. Программа Coil32 рассчитывает только слаботочные катушки на ферритовых кольцах, работающие в слабых полях. Для расчета силовых дросселей необходимо применять совершенно другую методику, в чем вам могут помочь следующие ссылки:
- КАК ЖЕ РАБОТАЮТ ТРАНСФОРМАТОРЫ И ДРОССЕЛИ – физические законы по которым работают трансформаторы и дроссели, петля гистерезиса, основные формулы.
- Трансформаторы и дроссели для ИИП – формулы и таблицы для расчета дросселей и трансформаторов импульсных источников питания.
- Сердечники из распылённого железа (IronPowder) – таблицы параметров сердечников из порошкового железа.
- Дроссели для импульсных источников питания на ферритовых кольцах – таблицы и формулы для расчета дросселя на кольце из феррита широкого применения.
- РАСЧЁТ ДРОССЕЛЯ – В.Я. Володин. Изложена оригинальная методика расчетов силовых дросселей как на стальных, так и на ферритовых сердечниках. Приведены формулы расчетов и примеры.
- Силовая электроника для любителей и профессионалов Б.Ю. Семенов 2001 – Доступным языком рассказывается о проектировании импульсных устройств питания. (Выбор магнитных материалов, расчет дросселей и трансформаторов, “Зачем нужен этот зазор?”, MOSFET, IGBT, чоппер, бустер и т.п.) Практические примеры конструкций и расчетов.
- Параметры ферритов широкого применения – справочная таблица основных характеристик.
Еще 3 года назад считалось, что блока питания мощностью 350W за глаза хватит для питания любого, самого навороченного домашнего компа. Бери БП помощнее от известного производителя, и можешь хоть обвешаться различными девайсами – ничего считать не нужно.Но сумасшедшая гонка за мегагерцамии fps’ами вносит свои коррективы: на рынке появился новый видеоускоритель от nVidia – GeForce GTX 580, ATI готовит ответный удар, и юзеру уже рекомендуют запастись БП мощностью 600W! Закономерно возникает вопрос: «Без замены блока питания апгрейд теперь невозможен?».
Принцип работы блока питания
Почему же горит БП?Есть много причин: остановился вентилятор, упал внутрь винтик, внутренности забились пылью и т. д.Но нас интересует другой момент. Что такое мощность
Стандарты БП
Читаем характеристики блока питания
Процессор
Видеоадаптер
Приводы
USB и IEEE 1394
Другие факторы
На что нужно обратить внимание при покупке БП
Выводы
|
| Описание | Тип блока питания | Помощь | |
|---|---|---|---|
| Входное напряжение преобразуется в более низкое выходное напряжение. | Понижающий преобразователь | Помощь с понижающим / понижающим преобразователем | |
| Входное напряжение преобразуется в более высокое выходное напряжение. | Повышающий преобразователь | Помощь для Повышающий преобразователь | |
| Входное напряжение преобразуется в отрицательное напряжение. | Buck-Boost преобразователь | Помощь для Buck-Boost | |
| Несколько изолированных выходных напряжений, до прибл.Возможно 250. | Обратный преобразователь | Помощь для Обратный преобразователь | |
| Одно электрически изолированное напряжение до прибл. 100 Вт. | одиночный транзистор Прямой преобразователь | Помощь для Одиночный транзистор Прямой преобразователь | |
| Одно электрически изолированное напряжение до прибл.1 кВт. | Двухтранзисторный Прямой преобразователь | Помощь для Двухтранзисторный прямой преобразователь | |
| Одно электрически изолированное напряжение до нескольких кВт. | Полумост Двухтактный преобразователь | Помощь для Полумост Двухтактный преобразователь | |
| Одно электрически изолированное напряжение до нескольких кВт. | Полный мост Двухтактный преобразователь | Помощь для Полный мост Двухтактный преобразователь | |
| Импульсный источник питания для синусоидального сетевого тока. | Предрегулятор коэффициента мощности (PFC) | Помощь для Коэффициент мощности Предварительный регулятор | |
| Расчет индуктора L на макс.ток I. | Индуктор расчет | Помогите с Индуктор расчет |
DC DC Converter – Расчет потерь мощности в импульсном регуляторе мощности?
Вы правы в том, что коммутатор имеет больше смысла для вашего приложения (12 В, 5 В 1.5А), чем линейный регулятор. Линейный кабель будет терять 7 В * 1,5 А = 10,5 Вт на тепло, от чего будет непросто избавиться. Для линейных регуляторов входной ток = выходной ток + рабочий ток. Для переключателей мощность на входе = мощность / КПД.
Я не искал упомянутую вами часть TI (возможно, нашел, если бы вы предоставили ссылку). Существует два широких класса импульсных регуляторов: с внутренними переключателями и с внешними переключателями. Если это регулятор второго типа, то рассеивание в детали не будет проблемой, поскольку он не обрабатывает мощность напрямую.
Если это полностью интегрированное решение, вам нужно учитывать рассеивание. Вы можете вычислить это рассеивание по выходной мощности и эффективности. Выходной сигнал будет 5 В * 1,5 А = 7,5 Вт. Если, например, коммутатор имеет КПД 80%, общая входная мощность будет 7,5 Вт / 0,8 = 9,4 Вт. Разница между выходной мощностью и входной мощностью составляет мощность нагрева, которая в данном случае составляет 1,9 Вт. Это намного лучше, чем то, что сделал бы линейный регулятор, но все же достаточно тепла, чтобы потребовать некоторого размышления и планирования.
80% – это просто число, которое я выбрал в качестве примера. Вам нужно внимательно изучить таблицу и получить хорошее представление о том, какая эффективность может быть в вашей рабочей точке. У хороших микросхем переключателя есть много графиков и другой информации по этому поводу.
Как только вы узнаете, сколько ватт будет нагревать микросхему, вы посмотрите на ее тепловые характеристики, чтобы увидеть, каков перепад температуры от кристалла к корпусу. В таблице должно быть указано значение градуса Цельсия на ватт. Умножьте это на рассеиваемую мощность в Ваттах, и вы увидите, насколько горячее будет кристалл, чем внешняя часть корпуса.Иногда они говорят вам о тепловом сопротивлении кристалла окружающему воздуху. Обычно это происходит, когда деталь не предназначена для использования с радиатором. В любом случае, вы обнаружите, на сколько градусов Цельсия будет горячее, чем все, что вы можете охладить или с чем иметь дело.
Теперь вы посмотрите на максимальную температуру кристалла, а затем вычтите указанное выше значение падения температуры. Если это хотя бы немного выше вашей наихудшей температуры окружающего воздуха, то у вас проблема. Если так, то получится беспорядок. Вам либо нужен радиатор, либо принудительный воздух, либо используйте другую деталь.Переключатели большей мощности обычно разрабатываются для внешних переключающих элементов, потому что силовые транзисторы поставляются в корпусах, предназначенных для нагрева. Чипы коммутатора обычно этого не делают.
Я не хочу продолжать строить догадки, поэтому вернитесь с цифрами о вашей конкретной ситуации, и мы можем продолжить с этого момента.
Импульсные источники питания для начинающих: учебник по эффективности, часть 1
Энергетическая эффективность является фундаментальной характеристикой любого импульсного источника питания (SMPS), и ее мера обычно определяет качество устройства преобразования.Высокие числа дают право хвастаться успешному инженеру, в то время как низкие числа обычно указывают на необходимость модификации или перепроектирования.
Максимальная эффективность является основным критерием для всех SMPS, но тем более для портативных устройств, где необходимо продлить срок службы батареи, чтобы обеспечить потребителям увеличенное время работы при использовании их любимых гаджетов и игрушек. Высокая эффективность также является обязательным условием для тех конструкций, которые требуют улучшенного управления температурным режимом или где затраты на подачу электроэнергии вызывают озабоченность.
Чтобы достичь максимальной эффективности преобразования в конструкции SMPS, инженер должен понимать элементарные механизмы потери мощности, присущие этим преобразователям, и то, что можно сделать, чтобы уменьшить их влияние. Кроме того, знакомство с общими функциями ИС SMPS, которые способствуют повышению эффективности, позволяет инженеру делать лучший выбор, когда сталкивается с конструкцией импульсного преобразователя.
В этом обсуждении, состоящем из двух частей, объясняются основные факторы, влияющие на эффективность SMPS, и дается руководство о том, как начать новую конструкцию.Потери мощности вводных материалов и коммутационных компонентов покрываются в этом первом взносе.
Ожидаемая эффективность
Энергетические потери являются неотъемлемой частью систем преобразования энергии. Неидеальности естественного мира не позволяют нам получить конечную награду в виде 100% эффективности преобразования. Тем не менее, хорошо спроектированные блоки питания могут достигать весьма значительной эффективности, обычно приближающейся к процентным значениям в диапазоне от среднего до высокого уровня 90-х годов.
Для любознательных людей эталонную эффективность можно получить, изучив типичные рабочие характеристики, указанные в таблицах данных, предоставляемых производителями ИС источников питания.Например, схема понижающего преобразователя в (рис. 1 ) обеспечивает КПД до 97% для определенных выходных конфигураций и дает высокий КПД для очень легких нагрузок.
Как достигаются такие высокие показатели эффективности? Уделять особое внимание фундаментальным потерям, общим для всех SMPS, – отличное начало. Эти потери обнаруживаются в основном в переключающих компонентах (полевые МОП-транзисторы и диоды) и, в меньшей степени, в катушках индуктивности и конденсаторах общей схемы SMPS. В зависимости от ИС могут быть выбраны специальные функции, которые будут бороться с потерями в эффективности, например варианты архитектуры управления и интеграция компонентов.Например, схема в (рис. 1 ) использует несколько методов для борьбы с собственными потерями, включая синхронное выпрямление, интегрированные полевые МОП-транзисторы с низким сопротивлением, низкое потребление тока покоя и архитектуру управления с пропуском импульсов, преимущества которой будут обсуждаться ниже. эта статья разворачивается.
Краткий обзор Stepdown SMPS
Хотя потери, которые будут обсуждаться, применимы ко всем базовым топологиям SMPS, следующий текст поясняется со ссылкой на общую схему понижающего преобразователя понижающего преобразователя в рис.2 . На рисунке также показаны некоторые формы сигналов переключения схемы, которые будут использоваться в расчетах, представленных позже.
Понижающий преобразователь снижает более высокое входное постоянное напряжение до более низкого выходного постоянного напряжения. При этом MOSFET включается и выключается с постоянной частотой модуляции (f S ) прямоугольным сигналом с широтно-импульсной модуляцией (PWM). Короче говоря, когда полевой МОП-транзистор включен, входной источник питания заряжает катушку индуктивности и конденсатор и подает мощность на нагрузку.В течение этого времени величина тока катушки индуктивности нарастает по мере его прохождения через контур 1, как показано на рис. 2 .
Когда полевой МОП-транзистор выключается, питание на входе отключается от выхода, а индуктор и выходной конденсатор поддерживают нагрузку. Величина тока катушки индуктивности снижается по мере прохождения через диод в соответствии с направлением, указанным в контуре 2. Доля периода переключения, в которой включен полевой МОП-транзистор, определяется скважностью (D) сигнала ШИМ.D делит каждый период переключения (t S ) на интервалы [D xt S ] и [(1-D) xt S ], которые связаны с проводимостью MOSFET (петля 1) и проводимостью диода (петля 2). , соответственно.
Во всех топологиях SMPS это разделение периода переключения используется для преобразования выходного напряжения. Для понижающего преобразователя, чем больше рабочий цикл, тем больше энергии подается на нагрузку и увеличивается среднее выходное напряжение. И наоборот, когда рабочий цикл уменьшается, среднее выходное напряжение уменьшается.
В связи с этим соотношением коэффициенты преобразования для понижающего ИИП составляют:
V ВЫХ = D x V IN
I ВХОД = D x I ВЫХ .
Важно отметить, что чем дольше любой ИИП остается в определенном интервале, тем больше относительные потери, совпадающие с этим интервалом. Для понижающего преобразователя низкий D означает большие относительные потери в контуре 2, поскольку этот контур доминирует в периоде переключения.
Потери коммутационных компонентов
МОП-транзистор и диод, изображенные на рис. 2 (и в большинстве других базовых топологий преобразователя), имеют тенденцию вызывать наибольшее снижение эффективности из-за природы этих полупроводниковых устройств. Оба являются жертвами двух видов потери мощности: потери проводимости и потери переключения.
Более простой для понимания – это потеря проводимости. Интуитивно понятно, что там, где есть ток, естественно будет противодействие току, и в результате будет тратиться энергия.И полевой МОП-транзистор, и диод действуют как переключатели, которые направляют ток через цепь, когда любое устройство включено в течение каждого интервала переключения. Следовательно, при включении этого конкретного устройства будут возникать потери проводимости из-за сопротивления открытого МОП-транзистора (R DSon ) и прямого напряжения диода.
Поскольку ток MOSFET течет только тогда, когда он включен, потери проводимости MOSFET (P CONDmosfet ) приблизительно равны произведению R DSon , рабочего цикла и квадрата тока в открытом состоянии:
P CONDmosfet = I MOSFETon (средн.) 2 x R DSon x D
, где I MOSFETon (avg) – средний ток MOSFET за интервал включения.Что касается понижающего преобразователя в рис.2 , MOSFET проводит выходной ток (I OUT ), когда он включен, в результате чего предполагаемые потери проводимости MOSFET составляют:
P CONDmosfet = I OUT 2 x R DSon x (V OUT / V IN )
В то время как потери проводимости MOSFET пропорциональны рассеиванию на его низком R DSon , потери проводимости диода зависят от сравнительно большего прямого напряжения (V F ).Таким образом, диоды обычно имеют большие потери проводимости, чем полевые МОП-транзисторы. Потери проводимости диода пропорциональны прямому току, VF и времени проводимости. Поскольку диод будет проводить, когда MOSFET выключен, потери проводимости диода (P CONDdiode ) приблизительно равны:
P CONDдиод = I DIODEon (avg) x V F x (1-D)
, где I DIODEon (avg) – средний ток диода за интервал включения. В рис. 2 средний прямой ток диода равен I OUT во время его интервала проводимости.Следовательно, P CONDдиод для понижающего преобразователя оценивается как:
P CONDдиод = I OUT x V F x (1 – V OUT / V IN )
При наблюдении этих уравнений становится очевидным, что чем дольше какое-либо устройство остается включенным в течение каждого интервала переключения, тем больше относительные потери проводимости этого устройства. Для понижающего преобразователя, чем ниже установлено выходное напряжение (при постоянном входном напряжении), тем больше диод способствует потере мощности, поскольку он проводит большую часть интервала переключения.
Возможно, несколько менее интуитивно понятны потери переключения MOSFET и диодов, которые возникают из-за неидеальности их характеристик переключения. Для перехода устройств из полностью выключенного состояния в полностью включенное и наоборот требуется время, что приводит к потреблению энергии при изменении состояния устройства.
Упрощенный график напряжения сток-исток (V DS ) и тока сток-исток (I DS ) обычно дается для объяснения потерь при переключении, встречающихся в полевых МОП-транзисторах.Верхний график рис. 3 изображает такие формы сигналов, где не мгновенные переходы напряжения и тока происходят во время t SWon и t SWoff из-за зарядки и разрядки емкостей, обнаруженных в MOSFET.
Как показано на графиках, ток полной нагрузки (I D ) должен быть передан на полевой МОП-транзистор до того, как его V DS уменьшится до конечного значения в открытом состоянии (= I D x R DSon ). И наоборот, переход выключения требует, чтобы V DS увеличился до своего конечного значения выключенного состояния до того, как ток будет передан от MOSFET.Эти переходы приводят к перекрытию форм сигналов напряжения и тока и приводят к рассеянию мощности, как показано на нижнем графике рис. 3 .
Времена перехода при переключении более или менее постоянны по частоте, что приводит к увеличению потерь при переключении при повышении частоты SMPS. Это можно понять, отметив, что постоянные периоды перехода потребляют больше доступного периода переключения по мере того, как этот период переключения сокращается.
Переключение переключения, для которого требуется только одна двадцатая рабочего цикла, будет иметь гораздо меньшее влияние на эффективность, чем переход, который потребляет одну десятую рабочего цикла.Из-за своей частотной зависимости коммутационные потери преобладают над потерями проводимости на высоких частотах.
Потери переключения полевого МОП-транзистора(P SWmosfet ) оцениваются путем применения треугольной геометрии к (рис. 3) для получения следующего уравнения:
P SWmosfet 0,5 x V D x I D x (t SWon + t SWoff ) x f s
, где V D – напряжение сток-исток полевого МОП-транзистора во время отключения, I D – ток канала во время работы, а t SWon и t SWoff – включение и выключение. -время перехода соответственно.Для понижающего преобразователя напряжение V IN подается на полевой МОП-транзистор в выключенном состоянии, и он передает I OUT , когда он включен.
Чтобы продемонстрировать вышеупомянутые уравнения проводимости и коммутационных потерь полевого МОП-транзистора, был использован осциллограф для захвата сигналов V DS и I DS типичного интегрированного полевого МОП-транзистора высокого напряжения в понижающем преобразователе. Условия схемы были следующие: V IN = 10 В, V OUT = 3,3 В, I OUT = 500 мА, R DSon = 0.1 Ом, f S = 1 МГц, и переходный процесс переключения (t ON + t OFF ) составляет 38 нс.
Как видно из рис. 4 , переключение не происходит мгновенно, и перекрытие форм сигналов тока и напряжения приводит к потере мощности, обозначенной нижним сигналом. Форма волны тока нарастает, поскольку I DS следует за током катушки индуктивности в течение цикла «включено» ( рис. 2 ), что приводит к большим потерям переключения, возникающим во время переходного процесса «выключено».
Используя ранее упомянутые приближения, вычисляются общие средние потери MOSFET:
P Tmosfet = P CONDmosfet + P SWmosfet
= I OUT 2 x R DSon x (V OUT / V IN ) + 0,5 x V IN x I OUT x (t SWon + t SWoff ) xf с
= 0,5 2 x 0,1 x 0,33 + 0,5 x 10 x 0,5 x (38 x 10 -9 ) x 1 x 10 6
8.3 мВт + 95 мВт
P Tmosfet = 103,3 мВт
Результат соответствует среднему значению 117,4 мВт нижней кривой. Обратите внимание, что в этом случае f S достаточно велико, чтобы P SWmosfet преобладал над потерями проводимости.
Как и полевой МОП-транзистор, диод также демонстрирует потери при переключении. Однако эти потери в значительной степени зависят от времени обратного восстановления (t RR ) используемого диода. Потери при переключении диода возникают во время перехода диода из состояния прямого смещения в обратное.
Заряд, присутствующий в диоде из-за прямого тока, должен быть снят с перехода, поскольку к нему приложено обратное напряжение, что приводит к всплеску тока (I RRpeak ), противоположному прямому току. Это действие приводит к потере мощности V × I, поскольку во время этого события обратного восстановления на диод подается обратное напряжение. На рис. 5 представлен упрощенный график периода обратного восстановления pn-диода.
Если известны характеристики обратного восстановления диода, для оценки потерь мощности переключения (P SW диод ) диода используется следующее уравнение:
P SW диод 0.5 x V REVERSE x I RRpeak x t RR2 x f s
, где V REVERSE – напряжение обратного смещения на полевом МОП-транзисторе, I RRpeak – пиковый ток обратного восстановления, t RR2 – это часть времени обратного восстановления после пикового значения I RR . Для понижающего преобразователя V IN смещает диод в обратном направлении после включения полевого МОП-транзистора.
Чтобы продемонстрировать уравнения диодов, Рис. 6 показывает формы сигналов напряжения и тока, наблюдаемые для pn-переключающего диода в типичном понижающем преобразователе.V IN = 10 В, V OUT = 3,3 В, измеренное I RRpeak = 250 мА, I OUT = 500 мА, f S = 1 МГц, t RR2 = 28 нс и В F = 0,9 В. Используя эти значения:
P ВСЕГО диод = P SW диод + P COND диод
(1 – V OUT / V IN ) x I OUT x V F + 0,5 x V IN x I RRpeak x t RR2 x f S
= (1-0.33) x 0,5 x 0,9 + 0,5 x 10 x 0,25 x 28 x 10 -9 x 1 x 10 6
= 301,5 мВт + 35 мВт
= 336,5 мВт
Этот результат совпадает со средней потерей мощности 358,7 мВт, указанной на нижнем графике в рис. 6 . Из-за большого значения V F и большого интервала проводимости диода, а также поскольку t RR является относительно быстрым, потери проводимости (P SW диод ) преобладают в диоде.
Учитывая предыдущее обсуждение, что можно сделать, чтобы уменьшить потери, вызванные переключающими компонентами источника питания? Простой ответ – выбирайте полевые МОП-транзисторы с низким R DSon и быстрыми переходными процессами, а также диоды с низким V F и быстрым периодом восстановления.
Несколько явлений напрямую влияют на сопротивление полевого МОП-транзистора в открытом состоянии. Естественно, R DSon увеличивается с увеличением размеров кристалла и напряжения пробоя сток-исток (V BRdss ) из-за увеличения количества полупроводникового материала в устройстве. Таким образом, увеличение размера полевого МОП-транзистора может привести к снижению эффективности, которого могло бы не быть у меньшего, правильно выбранного устройства.
Кроме того, из-за положительного температурного коэффициента полевого МОП-транзистора R DSon увеличивается с увеличением температуры кристалла.Таким образом, необходимо соблюдать надлежащие методы управления температурным режимом, чтобы поддерживать низкие температуры перехода и гарантировать, что R DSon не будет чрезмерно расти.
Сопротивление в открытом состоянии также до определенного значения изменяется обратно пропорционально смещению затвор-исток. Поэтому рекомендуется максимальное напряжение управления затвором для достижения самого низкого R DSon , с учетом увеличенных потерь управления затвором, вызванных этим. Однако напряжение управления затвором в ИИП часто не регулируется. То есть, если только опция не позволяет пользователю сделать это, например, самонастройка источника питания IC, или когда внешний драйвер затвора используется для проекта SMPS.
Коммутационные потери полевого МОП-транзисторазависят от емкости устройства. Большие емкости заряжаются медленнее, в результате чего переходы при переключении длятся дольше и рассеивают больше энергии. Емкость Миллера, обычно называемая емкостью обратной передачи (C RSS ) или емкостью затвор-сток (C GD ) в таблицах данных MOSFET, является основным фактором времени перехода во время переключения.
Заряд, необходимый для емкости Миллера, обозначается Q GD и, как и в случае емкости Миллера, должен быть минимальным для более быстрого переключения.Поскольку емкость полевого МОП-транзистора также зависит от размера кристалла, обычно рассматривается компромисс между потерями проводимости и коммутационными потерями, при этом особое внимание уделяется частоте коммутации схемы.
Для диода прямое напряжение должно быть минимизировано, так как потери из-за него могут быть большими. Прямое напряжение обычно находится в диапазоне от 0,7 В до 1,5 В для небольших диодов с более низким номиналом. Опять же, размеры, процесс и номинальное напряжение влияют на прямое напряжение и время обратного восстановления, при этом более высокие характеристики и большие размеры демонстрируют более высокие V F и t RR , что приводит к большим потерям.
Переключающие диоды, предназначенные для высокоскоростных приложений, часто классифицируются по быстродействию, а именно: быстрые, сверхбыстрые и сверхбыстрые восстанавливающиеся диоды, причем время обратного восстановления уменьшается с увеличением скорости. Быстрые диоды имеют тенденцию иметь t RR за сотни наносекунд, в то время как сверхбыстрые диоды имеют тенденцию к нескольким десяткам наносекунд.
Хотя pn-диоды обычно имеют большие падения напряжения в прямом направлении, они также доступны с большими номинальными значениями напряжения и тока, что делает их пригодными для приложений с более высокой мощностью.Но даже с оптимизированными диодами V F и RR , как правило, не встретишь высокоскоростной восстанавливающий диод в маломощных или портативных устройствах, поскольку потери энергии слишком велики.
В качестве возможной альтернативы диодам с быстрым восстановлением в маломощных приложениях диоды Шоттки предлагают практически полное время восстановления и V F , что почти вдвое меньше, чем у диодов с быстрым восстановлением (часто от 0,4 В до 1 В), но недоступно с такими высокими номинальными напряжениями, как у диодов с быстрым восстановлением.Из-за преимуществ диоды Шоттки широко используются в приложениях с низким энергопотреблением, чтобы значительно снизить потери мощности, связанные с переключающим диодом, особенно в приложениях с малым рабочим циклом.
Однако даже при низком падении прямого напряжения диод Шоттки может иметь недопустимые потери проводимости в низковольтных устройствах. Рассмотрим понижающий выход 1,5 В, где используется типичный диод Шоттки 0,5 В. Это 33% выходного напряжения во время диодной проводимости!
Эту ситуацию с высокими потерями можно улучшить, воспользовавшись преимуществом низкого R DSon полевого МОП-транзистора в методе, называемом синхронным выпрямлением.Здесь полевой МОП-транзистор заменяет диод (сравните рис. 1, и рис. 2 ) и синхронизируется с другим полевым МОП-транзистором, так что оба они проводят попеременно во время соответствующих интервалов переключения. Теперь относительно высокое напряжение V F диода заменено гораздо меньшим падением напряжения R DSon (в зависимости от тока) полевого МОП-транзистора, компенсируя потерю эффективности из-за проводимости диода.
Однако у синхронного выпрямления есть свои компромиссы, такие как повышенная сложность и стоимость, и он может не оказаться значительным преимуществом для очень высоких уровней тока, поскольку потери проводимости полевого МОП-транзистора увеличиваются пропорционально квадрату его тока.Кроме того, поскольку мощность расходуется при включении затвора синхронного выпрямителя, инженер должен взвесить эффективный штраф дополнительного привода затвора.
Лист данных
До сих пор обсуждались потери мощности, присущие двум основным компонентам универсального импульсного источника питания, полевому МОП-транзистору и диоду. Вспоминая схему понижения на рис. 1 , несколько важных аспектов ИС контроллера, которые помогают в ее очень эффективной работе, можно связать, обратившись к ее техническому описанию.
Во-первых, коммутационные компоненты интегрированы в корпус ИС, что позволяет сэкономить место и снизить паразитные потери. Во-вторых, используются полевые МОП-транзисторы DSon с низким R . Они указаны на 0,27 Ом (тип.) И 0,19 Ом (тип.) Для NMOS и PMOS, соответственно. В-третьих, используется синхронное выпрямление. Для 50% рабочего цикла и нагрузки 500 мА это снижает более низкие потери проводимости переключателя с 250 мВт при использовании диода 1 В до примерно 34 мВт из-за низкого R DSon синхронного транзистора NMOS.
Хотя коммутационные компоненты сильно влияют на эффективность SMPS, есть больше областей, в которых инженер может бороться с агрессивными эффектами потери мощности. Во второй части этой статьи будут рассмотрены потери в пассивных компонентах и важные особенности повышения эффективности микросхем SMPS.
Список литературы
Mohan, Ned; Undeland, Tore M .; и Роббинс, Уильям П. Силовая электроника: преобразователи, приложения и дизайн , главы 2, 7, 20 и 22, John Wiley & Sons, третье издание, 2003 г.
Как рассчитать максимальный входной переменный ток
Как рассчитать максимальный входной переменный ток.
Ан-21
Знание максимального входного тока источника питания может быть полезно при выборе требований к электроснабжению, выборе автоматического выключателя, выбора входного кабеля переменного тока и разъема и даже при выборе изолирующего трансформатора для плавающих приложений. Вычислить максимальный входной ток довольно просто, зная несколько основных параметров и некоторую простую математику.
Номинальная мощность блока питания высокого напряжения
Все блоки питания Spellman имеют заявленную максимальную номинальную мощность в ваттах. Это первый параметр, который нам понадобится, и его можно найти в паспорте продукта. У большинства блоков питания Spellman максимальная мощность указана прямо в номере модели. Как и в этом примере, SL30P300 / 115 представляет собой блок 30 кВ с положительной полярностью, который может обеспечить максимум 300 Вт; работает от входной линии 115Vac.
КПД источника питания
КПД источника питания – это отношение входной мощности к выходной мощности.Эффективность обычно указывается в процентах или в виде десятичной дроби меньше 1, например, 80% или 0,8. Чтобы вычислить входную мощность, мы берем заявленную максимальную выходную мощность и делим ее на эффективность:
300 Вт / 0,8 = 375 Вт
Коэффициент мощности
Коэффициент мощности – это отношение реальной мощности к полной используемой мощности. Обычно она выражается десятичным числом меньше 1. Реальная мощность выражается в ваттах, а полная мощность выражается в ВА (вольт-амперах). Однофазные импульсные источники питания без коррекции обычно имеют довольно низкий коэффициент мощности, например 0.65. Трехфазные импульсные источники питания без коррекции имеют более высокий коэффициент мощности, например 0,85. Устройства со схемой активной коррекции коэффициента мощности могут иметь очень хороший коэффициент мощности, например 0,98. В нашем примере выше источник питания представляет собой неисправный блок, питаемый от однофазной сети, поэтому:
375 Вт / 0,65 = 577 ВА
Напряжение входной линии
Нам нужно знать входное напряжение переменного тока, от которого устройство предназначено для питания . В приведенном выше примере входное напряжение переменного тока составляет 115 В переменного тока. Это номинальное напряжение, в действительности входное напряжение указано как ± 10%.Нам нужно вычесть 10%, чтобы учесть наихудший случай, состояние низкой линии:
115 В переменного тока – 10% = 103,5 В переменного тока
Максимальный входной ток переменного тока
Если мы возьмем 577 ВА и разделим его на 103,5 В переменного тока, мы получим:
577 ВА / 103,5 В переменного тока = 5,57 ампер
Если наше входное напряжение переменного тока однофазное, то у нас есть ответ – 5,57 ампер.
Трехфазное входное напряжение
Блоки с трехфазным входным напряжением питаются от трех фаз, поэтому они имеют лучший коэффициент мощности, чем однофазные блоки.Также за счет наличия трех фаз, питающих агрегат, фазные токи будут меньше. Чтобы получить входной ток на каждую фазу, мы разделим наш расчет входного тока на √3 (1,73).
Рассчитаем этот пример: STR10N6 / 208. Из таблицы данных STR мы узнаем, что максимальная мощность составляет 6000 Вт, КПД составляет 90%, а коэффициент мощности составляет 0,85. Несмотря на то, что STR по проекту будет работать с напряжением до 180 В переменного тока, в этом примере он будет питаться от трехфазной сети 208 В переменного тока. Мы получаем максимальный входной ток на фазу следующим образом:
КПД источника питания
6000 Вт /.9 = 6666 Вт
Коэффициент мощности
6666 Вт / 0,85 = 7843 ВА
Напряжение входной линии
208 В переменного тока – 10% = 187 В переменного тока
Максимальный входной ток переменного тока
7843 ВА / 187 В переменного тока = 41,94 ампер (если он был однофазным)
Поправка для трехфазного входа
41,94 ампер / √3 (1,73) = 24,21 ампер на фазу
Итак, у нас есть два уравнения, одно для однофазных входов и одно для трехфазных входов:
Однофазное уравнение максимального входного тока
Входной ток = максимальная мощность / (КПД) (коэффициент мощности) (минимальное входное напряжение)
Уравнение трехфазного максимального входного тока
Входной ток = максимальная мощность / (КПД) (коэффициент мощности) (минимальное входное напряжение) ( √3)
Эти расчеты входного тока предназначены для наихудшего случая: предполагается, что блок работает на максимальной мощности, работает при низком уровне напряжения в сети и с учетом КПД и коэффициента мощности.
Щелкните здесь, чтобы загрузить pdf.
Праймер по эффективности для Switch-Mode, DC-
Аннотация: Подробно описаны методы расчета и прогнозирования потерь эффективности в каждом компоненте импульсного источника питания (SMPS). Кроме того, обсуждаются особенности и методы, повышающие эффективность импульсного регулятора.
Введение
Эффективность преобразования является основным критерием для всех импульсных источников питания (SMPS), но еще более критична для тех, которые используются в портативных устройствах, где продление срока службы батареи является ключевой целью.Высокая эффективность также является обязательным условием для компактных конструкций, которые борются с тепловым управлением, или для продуктов, где стоимость обеспечения питания вызывает озабоченность.Для достижения максимальной эффективности преобразования в SMPS это помогает понять элементарные механизмы потери мощности в этих преобразователях и что можно сделать, чтобы уменьшить их влияние. Кроме того, знакомство с функциями ИС SMPS, которые способствуют повышению эффективности, позволяет инженеру делать осознанный выбор. Будут объяснены основные факторы, влияющие на эффективность SMPS, и будут даны рекомендации о том, как начать новую конструкцию.Мы начнем с вводного материала, а затем перейдем к конкретным потерям мощности в коммутирующих компонентах.
Ожидаемая эффективность
Потери энергии – неизбежная часть систем преобразования энергии. Хотя 100% -ная эффективность системы недостижима, хорошо спроектированные блоки питания могут достичь весьма значительной эффективности, приближающейся к процентным значениям в диапазоне от среднего до высокого уровня 90-х годов.Эталонные значения эффективности для большинства ИС источников питания можно получить, изучив типичные рабочие характеристики, указанные в технических паспортах устройств.В технических паспортах Maxim можно полагаться, что эти данные являются фактическими результатами измерений. Это должно относиться к любым данным поставщика микросхем, но мы можем поручиться только за свои собственные. Примером SMPS является схема понижающего преобразователя , показанная на рис. 1 , которая обеспечивает КПД до 97% и поддерживает высокий КПД даже при небольших нагрузках.
Как достигаются такие высокие показатели эффективности? Понимание фундаментальных потерь, общих для всех SMPS, – отличное начало. Эти потери возникают в основном в переключающих компонентах (полевые МОП-транзисторы и диоды) и, как правило, в меньшей степени, в катушках индуктивности и конденсаторах.Однако потери в катушке индуктивности и конденсаторах могут быть более значительными, когда используются особенно недорогие (и высокоомные) компоненты.
Что касается ИС, можно выбрать специальные функции, которые борются с потерей эффективности, такие как варианты архитектуры управления и интеграция компонентов. Например, схема на рисунке 1 использует несколько функций минимизации потерь, включая синхронное выпрямление, интегрированные полевые МОП-транзисторы с низким сопротивлением, низкое потребление тока покоя и архитектуру управления с пропуском импульсов.Их преимущества будут обсуждаться по мере развертывания этой статьи.
Рис. 1. ИС понижающего преобразователя, такие как MAX1556, используют такие функции, как полевые МОП-транзисторы с низким сопротивлением и синхронное выпрямление, для достижения КПД, который постоянно превышает 95%, как показано на прилагаемом графике.
Обзор понижающего ИИП
Хотя потери, которые будут обсуждаться, применимы ко всем топологиям SMPS, следующий текст ссылается на общую схему понижающего преобразователя (или buck ), показанную на рис. 2 .На рисунке также показаны формы сигналов схемы, на которые будут ссылаться в последующих расчетах.
Рис. 2. Общая схема понижающего SMPS и связанные с ней формы сигналов являются хорошим примером для иллюстрации концепций, лежащих в основе всех топологий SMPS.
Основная функция понижающего преобразователя – понижать более высокое входное напряжение постоянного тока до более низкого выходного напряжения постоянного тока. При этом MOSFET включается и выключается с постоянной частотой модуляции (f S ) с помощью сигнала с широтно-импульсной модуляцией (PWM).Когда полевой МОП-транзистор включен, входной источник питания заряжает катушку индуктивности и конденсатор (L и C OUT ) и подает мощность на нагрузку. В течение этого времени величина тока катушки индуктивности нарастает по мере его прохождения через контур 1, показанный на рисунке 2.
Когда полевой МОП-транзистор выключается, входное питание отключается от катушки индуктивности, а катушка индуктивности и выходной конденсатор поддерживают нагрузку. Величина тока катушки индуктивности снижается по мере прохождения через диод по пути, обозначенному контуром 2.Доля периода переключения, в которой полевой МОП-транзистор включен, определяется рабочим циклом (D) сигнала ШИМ. D делит каждый период переключения на интервалы [D × t S ] и [(1 – D) × t S ], которые связаны с проводимостью полевого МОП-транзистора (контур 1) и проводимости диода (контур 2), соответственно. Все топологии SMPS (понижающие, инвертирующие и т. Д.) Используют это разделение периода переключения для достижения преобразования напряжения.
Для понижающего преобразователя больший рабочий цикл передает больше энергии в нагрузку, увеличивая среднее выходное напряжение.И наоборот, среднее выходное напряжение уменьшается с уменьшением рабочего цикла. Благодаря этому соотношению идеализированные (без учета падения напряжения на диодах или полевых МОП-транзисторах) коэффициенты преобразования для понижающего импульсного источника питания составляют:
V ВЫХ = D × V INВажно отметить, что чем дольше любой ИИП остается в определенном интервале, тем больше относительные потери, совпадающие с этим интервалом. Для понижающего преобразователя низкий D (и, следовательно, низкий V OUT ) приводит к большим относительным потерям вокруг контура 2, поскольку этот контур доминирует в периоде переключения.
I IN = D × I OUT
Потери коммутационных компонентов
Потери проводимости полевого МОП-транзистора
МОП-транзистор и диод на рисунке 2 (и в большинстве других топологий преобразователя постоянного тока), как правило, несут ответственность за самые большие потери мощности. Оба страдают от двух видов потерь мощности: потерь на проводимость и переключения.МОП-транзистор и диод действуют как переключатели, которые направляют ток через цепь во время каждого интервала переключения. Потери проводимости возникают в открытом сопротивлении полевого МОП-транзистора (R DS (ON) ) и прямом напряжении диода, когда каждое конкретное устройство включено.Потери проводимости полевого МОП-транзистора
(P COND (MOSFET) ) можно приблизительно приблизительно рассчитать произведением R DS (ON) , рабочего цикла (D) и среднего тока полевого МОП-транзистора (I MOSFET (AVG) ) в течение периода включения.
P COND (MOSFET) (с использованием среднего тока) = I MOSFET (AVG) ² × R DS (ON) × DВышеприведенное уравнение аппроксимирует потери проводимости MOSFET в SMPS, но может недооценивать потери, потому что наклонная часть формы волны тока генерирует больше потерь, чем было бы указано средним током.Для «пиковых» форм тока более точная оценка получается путем интегрирования квадрата линейного изменения тока между его пиковыми и минимальными значениями (I V и I P на , рис. 3, ).
Рис. 3. Деталь типичной формы волны тока понижающего полевого МОП-транзистора с целью точной оценки потерь проводимости полевого МОП-транзистора.
Следующее уравнение более точно предсказывает потери для линейно нарастающей формы волны путем замены простого члена I² интегралом от I² между I P и I V .
Где I P и I V – точки пика и спада на кривой тока, как показано на рисунке 3.Линейное изменение тока полевого МОП-транзистора с I V до I P . Например, если I V равен 0,25 A, I P равен 1,75 A, R DS (ON) равен 0,1 Ом, а V OUT равен V IN /2 (для D = 0,5), расчет, который учитывает только средний ток (1 А), будет:
P КОНД (МОП-транзистор) = [I MOSFET (AVG) ² + (I P – I Y ) ² / 12] × R DS (ON) × D = [I MOSFET (AVG) ² + (I P – I Y ) ² / 12] × R DS (ON) × V OUT / V IN
P COND (MOSFET) (с использованием среднего тока) = 1² × 0,1 × 0,5 = 0,050 ВтПри более точном интегрировании квадрата пандуса получаем:
P COND (MOSFET) (с использованием интеграла квадрата тока) = [1² + (1.75 – 0,25) ² / 12] × 0,1 × 0,5 = 0,059 Втили примерно на 18% выше, чем результат, полученный по уравнению среднего тока. Для сигналов тока с небольшим отношением размаха к пику к среднему разность будет меньше, и может быть достаточно более простого вычисления среднего тока.
Потери диодной проводимости
В то время как потери проводимости MOSFET пропорциональны R DS (ON) , потери проводимости диодов зависят от сравнительно большего прямого напряжения (V F ). Следовательно, диоды обычно имеют большие потери проводимости, чем полевые МОП-транзисторы.Потери на диоде пропорциональны прямому току, V F , и времени проводимости. Поскольку диод проводит, когда MOSFET выключен, потери проводимости диода (P COND (DIODE) ) приблизительно равны:P КОНД (ДИОД) = I ДИОД (ВКЛ) × V F × (1 – D)где I DIODE (ON) – средний ток диода за его интервал включения. На рисунке 2 средний прямой ток диода равен I OUT во время его интервала проводимости. Следовательно, P COND (DIODE) для понижающего преобразователя оценивается как:
P COND (DIODE) = I OUT × V F × (1 – V OUT / V IN )В отличие от расчета мощности полевого МОП-транзистора, средний ток дает достаточно точный результат для потерь в диоде, поскольку потери пропорциональны I, а не I².
Очевидно, что чем дольше полевой МОП-транзистор или диод остается включенным во время каждого интервала переключения, тем больше потери проводимости этого устройства. Для понижающего преобразователя, чем ниже выходное напряжение, тем больше диод способствует потере мощности, поскольку он проводит большую часть интервала переключения.
Динамические потери при переключении
Немного менее интуитивно понятны, чем потери проводимости, потери при переключении MOSFET и диодов. Поскольку для переходов между состояниями включения и выключения полевого МОП-транзистора и диода требуется время, мощность потребляется при изменении состояния этих устройств.Упрощенный график напряжения сток-исток полевого МОП-транзистора (V DS ) и тока сток-исток (I DS ) в верхней части Рисунок 4 показывает коммутационные потери, возникающие во время переходов. Переходы напряжения и тока происходят во время t SW (ON) и t SW (OFF) . Это время является результатом зарядки и разрядки емкостей полевого МОП-транзистора.
Как показано на рисунке 4, ток полной нагрузки (I D ) должен быть передан на полевой МОП-транзистор до того, как его напряжение V DS уменьшится до конечного значения в открытом состоянии (= I D × R DS (ON) ).И наоборот, переход выключения требует, чтобы V DS увеличился до своего конечного значения выключенного состояния до того, как ток будет передан от MOSFET. Эти переходы приводят к перекрытию форм сигналов напряжения и тока и приводят к рассеиванию мощности, изображенному на нижнем графике рис. 4.
Рис. 4. Коммутационные потери возникают при переходах полевого МОП-транзистора между его включенным и выключенным состояниями.
Потери при переключении увеличиваются с увеличением частоты SMPS. Это можно понять, отметив, что переходные периоды занимают фиксированное количество времени и, следовательно, большую долю от общего периода переключения при увеличении частоты и сокращении периода переключения.Переключение переключения, для которого требуется только одна двадцатая рабочего цикла, будет меньше влиять на эффективность, чем переключение, потребляющее одну десятую. Из-за своей частотной зависимости коммутационные потери преобладают над потерями проводимости на высоких частотах. Потери переключения полевого МОП-транзистора
(P SW (MOSFET) ) можно оценить, применив треугольную геометрию к рисунку 3, чтобы получить следующее уравнение:
P SW (MOSFET) = 0,5 × V D × I D × (t SW (ON) + t SW (OFF) ) × f Sгде V D – напряжение сток-исток полевого МОП-транзистора во время отключения, I D – ток канала во время включения, а t SW (ON) и t SW (OFF) – это время включения и выключения соответственно.Для понижающего преобразователя V IN подается на полевой МОП-транзистор в выключенном состоянии, а I OUT проходит через него, когда он включен.
Чтобы продемонстрировать потери проводимости и переключения полевого МОП-транзистора, формы сигналов V DS и I DS типичного интегрированного полевого МОП-транзистора высокого напряжения в понижающем преобразователе показаны на рис. 5 . Условия схемы следующие: V IN = 10 В, V OUT = 3,3 В, I OUT = 500 мА, R DS (ON) = 0,1 Ом, f S = 1 МГц, а переходы переключения ( t ON + t OFF ) итого 38нс.
Как видно на рисунке 5, переключение не является мгновенным, а перекрытие формы сигнала тока и напряжения приводит к потере мощности, указанной на нижнем графике сигнала. Поскольку I DS следует за током катушки индуктивности в течение цикла «включения» (рис. 2), форма волны тока нарастает, что приводит к большим потерям переключения во время фронта выключения по сравнению с фронтом включения.
Используя ранее упомянутые приближения, рассчитываются общие средние потери MOSFET:
Этот результат согласуется со средним значением 117,4 мВт, измеренным по нижнему графику на Рисунке 5. Обратите внимание, что в этом случае f S достаточно высокое, чтобы доминировать P SW (MOSFET) .
P ИТОГО (MOSFET) = P COND (полевой МОП-транзистор) + P SW (полевой МОП-транзистор) = [I MOSFET (AVG) ² + (I P – I Y ) ² / 12] × R DS (ON) × V OUT / V IN + 0.5 × V IN × I OUT × (t SW (ON) + t SW (OFF) ) × f S = [0,5² + (1–0) ² / 12] × 0,1 × 3,3 / 10 + 0,5 × 10 × 0,5 × (38 × 10 -9 ) × 1 × 10 6 = 0,011 + 0,095 = 106 мВт
Рис. 5. Цикл переключения типичного полевого МОП-транзистора верхнего уровня в понижающем преобразователе показан для примера, где вход 10 В преобразуется в 3,3 В при 500 мА. Частота переключения составляет 1 МГц, а переходной процесс переключения составляет 38 нс.
Как и полевые МОП-транзисторы, диоды также демонстрируют потери при переключении. Эти потери в значительной степени зависят от времени обратного восстановления (t RR ) используемого диода. Потери при переключении диодов возникают при переходе от прямого к обратному смещению.
Заряд, присутствующий в диоде из-за прямого тока, должен быть снят с перехода при приложении обратного напряжения, что приводит к всплеску тока (I RR (PEAK) ) противоположной полярности по отношению к прямому току. Это действие приводит к потере мощности V × I, поскольку во время обратного восстановления на диод подается обратное напряжение. На рис. 6 представлен упрощенный график периода обратного восстановления PN диода.
Рис. 6. Заряд, накопленный в диоде при прямом токе, должен выводиться из перехода при приложении обратного напряжения, что приводит к всплеску тока (I RR (PEAK) ).
Когда характеристики обратного восстановления диода известны, следующее уравнение оценивает потери мощности переключения (P SW (DIODE) ) диода:
P SW (DIODE) = 0,5 × V REVERSE × I RR (PEAK) × t RR2 × f Sгде V REVERSE – напряжение обратного смещения на диоде, I RR (PEAK) – пиковый ток обратного восстановления, а t RR2 – это часть времени обратного восстановления после пиков I RR . .Для понижающего преобразователя V IN смещает диод в обратном направлении при включении полевого МОП-транзистора.
Чтобы продемонстрировать уравнение потерь в диоде, на рисунке 7 показаны формы сигналов напряжения и тока, наблюдаемые для переключающего диода PN в типичном понижающем преобразователе. V IN = 10 В, V OUT = 3,3 В, измеренное I RR (PEAK) = 250 мА, I OUT = 500 мА, f S = 1 МГц, t RR2 = 28 нс, и V F = 0,9 В. Используя эти значения:
Этот результат совпадает со средней потерей мощности 358.7 мВт указано на нижнем графике на Рисунке 7. Из-за большого значения V F и большого интервала проводимости диода, а также поскольку t RR является относительно быстрым, потери проводимости (P COND (DIODE) ) преобладают.
Рис. 7. Формы сигналов переключения понижающего переключающего диода PN показаны для случая, когда входное напряжение 10 В понижается до выходного сигнала 3,3 В при токе 500 мА. Другие параметры включают f S на 1 МГц, t RR2 на 28 нс и V F = 0.9В.
Повышение эффективности
Учитывая предыдущее обсуждение, что можно сделать, чтобы уменьшить потери, вызванные переключающими компонентами источника питания? Прямой ответ – выбирайте полевые МОП-транзисторы с низким R DS (ON) и быстрыми переходными процессами, а также диоды с низким V F и быстрым периодом восстановления.Несколько явлений напрямую влияют на сопротивление полевого МОП-транзистора в открытом состоянии. Естественно, R DS (ON) увеличивается с увеличением размеров кристалла и напряжения пробоя сток-исток (V BR (DSS) ) из-за увеличения количества полупроводникового материала в устройстве.Кроме того, полевые МОП-транзисторы большего размера обычно имеют большие переходные потери. Таким образом, несмотря на то, что увеличение размера MOSFET снижает R DS (ON) , это также может привести к снижению эффективности, которой могло бы не быть устройство меньшего размера.
Сопротивление полевого МОП-транзистора увеличивается с увеличением температуры кристалла, поэтому важно поддерживать низкие температуры перехода, чтобы не допустить чрезмерного роста R DS (ON) . R DS (ON) также изменяется обратно пропорционально смещению затвор-исток, вплоть до определенного значения. В общем, максимальное напряжение затвора снижает потери за счет достижения самого низкого R DS (ON) , но на высоких частотах переключения увеличенные потери управления затвором должны быть сбалансированы с преимуществом R DS (ON) .
Коммутационные потери MOSFET зависят от емкости устройства. Большие емкости заряжаются медленнее, в результате чего переходы при переключении длятся дольше и рассеивают больше энергии. Емкость Миллера, обычно называемая емкостью обратной передачи (C RSS ) или емкостью затвор-сток (C GD ) в таблицах данных MOSFET, является основным фактором времени перехода во время переключения.
Заряд, необходимый для емкости Миллера, обозначается Q GD и, как и сама емкость Миллера, должен быть минимальным для более быстрого переключения.Поскольку емкость полевого МОП-транзистора также зависит от размера кристалла, следует рассмотреть компромисс между потерями проводимости и коммутационными потерями, уделяя особое внимание частоте коммутации.
Прямое напряжение на диоде должно быть минимизировано, так как потери из-за него могут быть большими. Прямое напряжение обычно находится в диапазоне от 0,7 В до 1,5 В для небольших кремниевых диодов с более низким номиналом. Диодный процесс и номинальное напряжение влияют на прямое напряжение и время обратного восстановления, при этом более высокие номиналы и большие размеры обычно показывают более высокие V F и t RR .Переключающие диоды часто классифицируются по скорости, а именно «быстрые», «сверхбыстрые» и «сверхбыстрые» восстанавливающие диоды, причем время обратного восстановления уменьшается с увеличением скорости. Быстрые диоды имеют тенденцию иметь t RR за сотни наносекунд, в то время как сверхбыстрые диоды имеют тенденцию к нескольким десяткам наносекунд.
Диоды Шоттки предлагают практически полное время восстановления, а напряжение V F почти вдвое меньше, чем у диодов с быстрым восстановлением (часто от 0,4 В до 1 В), и являются хорошей альтернативой диодам с быстрым восстановлением в большинстве силовых приложений.Но диоды Шоттки не доступны с такими высокими значениями напряжения и тока, как у диодов с быстрым восстановлением, и иногда не могут использоваться в высоковольтных или очень мощных конструкциях. Диоды Шоттки также имеют более высокую обратную утечку, чем кремниевые, но этот недостаток обычно не ограничивает их пригодность для использования в большинстве источников питания.
Однако даже при низком падении прямого напряжения диод Шоттки может иметь недопустимые потери проводимости в низковольтных устройствах. Рассмотрим понижающий выход 1.5 В, где используется типичный диод Шоттки F В 0,5 В. Это все еще 33% от выходного напряжения во время диодной проводимости!
Потери в диодах можно уменьшить, используя преимущества низкого R DS (ON) полевого МОП-транзистора в методе, называемом синхронным выпрямлением. Полевой МОП-транзистор заменяет диод (сравните рис. 1 и рис. 2) и синхронизируется с основным силовым полевым МОП-транзистором, так что каждый переключатель работает поочередно в течение цикла переключения. Синхронный выпрямитель MOSFET проводит больше, чем диод.Теперь диод V F заменен более низким падением напряжения (MOSFET R DS (ON) × I), компенсирующим большую часть мощности, потерянной диодом. Это, конечно, остается верным только до тех пор, пока падение напряжения на MOSFET меньше, чем на диоде. Кроме того, нельзя игнорировать дополнительную мощность для привода затвора MOSFET синхронного выпрямителя.
Спецификация IC
До сих пор обсуждались потери мощности, присущие двум основным компонентам (МОП-транзистор и диод) импульсного источника питания.Вспоминая схему понижения на Рисунке 1, несколько важных аспектов ИС контроллера, которые помогают в эффективной работе, можно определить, обратившись к ее техническому описанию. Во-первых, коммутационные компоненты интегрированы в корпус ИС, что позволяет сэкономить место и снизить паразитные потери. Во-вторых, используются полевые МОП-транзисторы с низким R DS (ON) . В небольшой интегрированной понижающей ИС, такой как MAX1556, они указаны на 0,27 Ом (тип.) И 0,19 Ом (тип.) Для nMOS и pMOS, соответственно. В-третьих, используется синхронное выпрямление.При рабочем цикле 50% и нагрузке 500 мА это снижает потери проводимости переключателя (или диода) нижнего плеча с 250 мВт (при использовании диода 1 В) до примерно 34 мВт.Компромиссы ИС SMPS
Корпус, конструкция или архитектура управления ИС SMPS могут обеспечить различные повышения эффективности.Интегрированные выключатели питания
Интеграция переключающих устройств в ИС не только устраняет время и затраты, необходимые для выбора полевого МОП-транзистора или диода, но также может повысить эффективность за счет уменьшения площади схемы и паразитных потерь.В зависимости от уровня мощности и ограничений по напряжению можно интегрировать полевой МОП-транзистор, диод (или синхронный МОП-транзистор) или и то, и другое. Еще одним преимуществом интегрированных переключателей является то, что схема драйвера затвора имеет оптимальный размер для встроенных в микросхему полевых МОП-транзисторов, поэтому нет лишних затрат на чрезмерную конструкцию в ожидании неизвестных дискретных полевых МОП-транзисторов.Ток покоя
Особо важной спецификацией ИС, которая требует внимания в устройствах с батарейным питанием, является ток покоя (I Q ), который представляет собой ток, необходимый для поддержки самого устройства.Эффекты эффективности I Q относительно незаметны для более тяжелых нагрузок (больше, чем примерно одна или две величины I Q ), поскольку ток нагрузки забирает I Q . Однако по мере уменьшения тока нагрузки КПД имеет тенденцию к снижению, поскольку потери мощности из-за I Q становятся более значительным процентом от общей передачи мощности от источника. Это может быть особенно важно для устройств, которые проводят значительную часть своего срока службы в «спящем» или других состояниях с низким энергопотреблением. Для многих потребительских товаров даже “ВЫКЛ” может потребовать сканирования клавиатуры или других функций, которые требуют, чтобы источник питания оставался включенным.В таких ситуациях жизненно необходим низкий уровень I Q .Архитектуры повышают эффективность
Архитектура управления SMPS оказывает значительное влияние на эффективность SMPS. Это обсуждалось ранее в отношении управления синхронным выпрямлением, когда потери мощности переключающих диодов были уменьшены с помощью MOSFET с меньшими потерями.Другой метод управления, который важен для проектов, работающих с легкими нагрузками или с нагрузками, которые меняются в широком диапазоне, – это пропуск импульсов, также называемый частотно-импульсной модуляцией (ЧИМ).В отличие от чистого ШИМ-переключения, где схема регулирования требует постоянной частоты переключения независимо от тяжелых или легких нагрузок, пропуск импульсов позволяет контроллеру пропускать циклы переключения. Это действие предотвращает ненужные операции переключения, которые в конечном итоге снизили бы эффективность.
Когда импульсы пропускаются, индуктор может разряжаться в течение более длительного периода времени, и больше энергии передается от индуктора к нагрузке для поддержания выходного напряжения. Естественно, выходное напряжение снижается в соответствии с потребляемым током нагрузки.Как только порог регулирования напряжения достигнут, запускается новый цикл переключения, чтобы перезарядить катушку индуктивности и обновить выходное напряжение.
Имейте в виду, что пропуск импульсов создает пульсации на выходе, зависящие от нагрузки. Это затрудняет фильтрацию шума, поскольку шум переключения не возникает с постоянными интервалами, как при ШИМ-регулировании с постоянной частотой.
Усовершенствованные ИС SMPS часто сочетают в себе преимущества ШИМ с постоянной частотой при более высоких нагрузках с повышенной эффективностью пропуска импульсов при малых нагрузках.ИС, изображенная на рисунке 1, является именно таким устройством.
По мере увеличения нагрузки до более высоких активных значений формы сигналов с пропуском импульсов переходят в постоянную ШИМ, при этом шум легко фильтруется при нормальной рабочей нагрузке. Общий эффект – максимальный КПД во всем рабочем диапазоне, что демонстрируется на кривых КПД типичного понижающего преобразователя с выбираемыми режимами пропуска импульсов и ШИМ (, рис. 8, ).
Кривые D, E и F на рисунке 8 показывают, что КПД падает при более легких нагрузках во время постоянной работы ШИМ, но увеличивается (до 98%) при более высоких нагрузках.Если настроен на поддержание работы ШИМ при малых нагрузках, ИС переключается независимо от того, требуется ли это нагрузке. Это поддерживает пульсацию с постоянной частотой, но расходует энергию. При более высоких нагрузках потери энергии при поддержании ШИМ-переключения невелики по сравнению с нагрузкой, поэтому потери мощности перекрываются выходной мощностью. С другой стороны, кривые КПД «холостого хода» с пропуском импульсов (A, B и C на рисунке 8) сохраняют КПД даже при очень легких нагрузках, поскольку переключение происходит только по требованию нагрузки.Для входных кривых 7 В режим холостого хода обеспечивает повышение эффективности более чем на 60% при нагрузке 1 мА.
Рис. 8. Пример кривых КПД в режиме ШИМ и холостого хода (с пропуском импульсов) для понижающего преобразователя. Обратите внимание на повышение эффективности работы при малой нагрузке в режиме ожидания по сравнению с режимом ШИМ.
Максимизация потенциала SMPS
Хотя импульсные источники питания популярны благодаря своей очень высокой эффективности, эффективность в конечном итоге ограничивается собственными потерями, присутствующими во всей цепи SMPS.Но, внимательно изучив фундаментальные потери SMPS, одновременно ознакомившись со спецификациями микросхем SMPS и вспомогательными компонентами, инженер может сделать хорошо информированный выбор, который максимизирует эффективность SMPS с небольшими дополнительными затратами на схему или без них.Потери пассивных компонентов
Были исследованы потери ИИП, возникающие в полевом МОП-транзисторе и диоде в импульсном источнике питания. Мы показали, как качественные коммутационные устройства повышают эффективность, но это не единственные компоненты, которые можно оптимизировать для этого.На рис. 1 показаны основные компоненты типичного понижающего преобразователя на основе ИС. Управляющая ИС объединяет два синхронных полевых МОП-транзистора DS (ON) с низким R и обеспечивает КПД до 97%. Поскольку коммутационные компоненты интегрированы в ИС, они, по сути, предварительно выбраны и оптимизированы для применения. Чтобы оптимизировать общую эффективность, разработчикам следует обратить внимание на пассивные элементы – внешний индуктор и конденсаторы – чтобы понять, как они влияют на потерю мощности.
Потери мощности в индукторе
Резистивные потери
Потери мощности в катушке индуктивности описываются двумя основными явлениями: потерями в обмотке и потерями в сердечнике. Потери в обмотке связаны с сопротивлением постоянному току (DCR) катушки, из которой состоит катушка индуктивности, в то время как потери в сердечнике зависят от магнитных характеристик индуктора.DCR определяется следующим уравнением сопротивления:
где ρ – удельное сопротивление материала проволоки, l – длина проволоки, A – площадь поперечного сечения проволоки.DCR увеличивается с увеличением длины провода и уменьшается с увеличением толщины провода. Этот принцип можно применить к стандартным катушкам индуктивности, чтобы определить, чего ожидать при различных значениях индуктивности и размерах корпуса. При фиксированном значении индуктивности DCR имеет тенденцию к увеличению по мере уменьшения размера корпуса индуктора, поскольку площадь поперечного сечения провода должна уменьшаться, чтобы соответствовать тому же количеству витков. Для данного размера корпуса катушки индуктивности DCR обычно уменьшается для меньшей индуктивности, поскольку меньшее количество витков позволяет использовать более короткие провода большего калибра.
Зная DCR и средний ток индуктивности (в зависимости от топологии SMPS), потери резистивной мощности индуктора (P L (DCR) ) можно приблизительно оценить как:
P L (DCR) = I L (AVG) ² × DCRГде I L (AVG) – средний постоянный ток, протекающий через катушку индуктивности. Для понижающего преобразователя средний ток катушки индуктивности – это постоянный выходной ток. Хотя величина DCR напрямую влияет на потери резистивной мощности индуктора, эта потеря мощности пропорциональна квадрату тока индуктора, поэтому важно минимизировать DCR.
Отметим также, что расчет P L (DCR) с использованием среднего тока катушки индуктивности (как в приведенном выше уравнении) предсказывает несколько меньшие потери, чем на самом деле, из-за типичной треугольной формы тока индуктора. Как и в случае с расчетом потерь проводимости полевого МОП-транзистора ранее в этой статье, интегрирование квадрата формы волны тока катушки индуктивности обеспечивает более точный результат. Более точное, но и более сложное выражение:
P L (DCR) = [I L (AVG) ² + (I P – I Y ) ² / 12] × DCRГде I P и I V – точки пика и спада кривой тока индуктора.
Потери в сердечнике
Потери в сердечнике индуктора менее очевидны, чем потери проводимости, и их труднее измерить. Он состоит из гистерезиса и потерь на вихревые токи, которые являются прямым результатом изменения магнитного потока в сердечнике. В SMPS, хотя в индукторе протекает средний постоянный ток, пульсация тока из-за изменения переменного напряжения переключения на нем вызывает циклическое изменение магнитного потока в сердечнике.Потери на гистерезис возникают из-за мощности, затрачиваемой на перестройку магнитных диполей сердечника в каждом полупериоде переменного тока, и могут рассматриваться как «фрикционные» потери, поскольку диполи трутся друг о друга во время изменения полярности магнитного поля.Он прямо пропорционален частоте и плотности потока.
И наоборот, потери на вихревые токи возникают из-за изменяющегося во времени магнитного потока, присутствующего в области сердечника. Закон Фарадея сообщает нам, что изменяющийся во времени поток в сердечнике создает изменяющееся во времени напряжение. В свою очередь, это изменяющееся напряжение вызывает локальные токи, которые вызывают потери I²R, зависящие от удельного сопротивления сердечника.
Материал сердечника значительно влияет на величину потерь в сердечнике, и доступно несколько типов материалов.Для порошковых сердечников, обычно используемых в индукторах SMPS, сердечники из порошка молипермаллоя (MPP) обычно имеют самые низкие потери в сердечнике, в то время как сердечники из железного порошка, хотя и невысоки, обычно имеют самые высокие потери.
Потери в сердечнике можно оценить, рассчитав пиковое изменение плотности потока (B) в сердечнике, а затем проконсультировавшись с графиками B (поток в сердечнике) и потерями в сердечнике (и частотой), предоставленными производителем индуктора или сердечника, если таковые имеются. Пик B может быть рассчитан несколькими способами, и уравнения иногда встречаются рядом с кривыми потерь в сердечнике в таблицах характеристик индукторов.
В качестве альтернативы, если известны площадь сердечника и количество обмоток, следующее уравнение может оценить пиковый поток сердечника:
где B – пиковый поток сердечника (Гаусс), L – индуктивность катушки (Генри), ΔI – амплитуда пульсаций индуктора (амперы), A – площадь поперечного сечения сердечника (см²), N – количество витков.С увеличением использования Интернета для загрузки технических данных и исследования информации о компонентах, некоторые производители сделали доступным интерактивное программное обеспечение для определения потери мощности катушек индуктивности, чтобы помочь оценить потери мощности.Эти инструменты могут дать быструю оценку потерь в цепи приложения. Например, компания Coilcraft сделала доступным онлайн-калькулятор потерь в сердечнике и обмотке индуктора, который оценивает потери в сердечнике и меди для выбранной серии катушек индуктивности, просто вводя несколько значений.
Потери конденсатора
В отличие от идеальной модели конденсатора, реальные физические характеристики конденсатора создают несколько механизмов потерь. Эти потери снижают эффективность ИИП, поскольку в цепи питания ИИП используются конденсаторы для стабилизации напряжения и фильтрации входного и выходного шума (рис. 1).Эти потери характеризуются тремя диссипативными явлениями: последовательным сопротивлением, утечкой и диэлектрическими потерями.Резистивные потери конденсатора очевидны. Поскольку ток течет в конденсатор и выходит из него во время каждого цикла переключения, собственное сопротивление (R C ) металлических выводов и пластин в конденсаторе будет рассеивать резистивные потери мощности. Утечка описывается как небольшой ток, который течет «через» конденсатор из-за не бесконечного (хотя и очень высокого) сопротивления изоляции конденсатора (R L ).Диэлектрические потери более сложны и включают потерю энергии, поскольку молекулы диэлектрика поляризованы изменяющимся электрическим полем конденсатора при приложении переменного напряжения.
Рис. 9. Модель общих потерь конденсатора упрощена до модели эквивалентного последовательного сопротивления (ESR).
Все три из этих потерь представлены в типичной модели потерь конденсатора (левая часть рисунка 9) с использованием сопротивлений для описания каждого механизма рассеивания.Доля рассеиваемой мощности, представленная каждой потерей, по отношению к запасенной энергии конденсатора, называется коэффициентом рассеяния (DF) или тангенсом угла потерь δ. DF каждого механизма потерь находится путем сравнения реальной части импеданса конденсатора с его мнимой частью, когда каждый механизм потерь индивидуально вставлен в модель.
Для упрощения модели потерь контактное сопротивление, утечка и диэлектрические потери на рисунке 9 собраны вместе в отдельный элемент реальной потери мощности, называемый «эквивалентным последовательным сопротивлением» (ESR).ESR определяется как часть импеданса конденсатора, которая отвечает за общие потери реальной мощности в конденсаторе.
При математическом манипулировании моделью импеданса конденсатора и вычислении ESR (которое является реальной частью результата) видно, что ESR зависит от частоты. Эта зависимость демонстрируется в следующем упрощенном уравнении ESR:
где DF R , DF L и DF D – коэффициенты рассеяния, характерные для контактного сопротивления, утечки и диэлектрических потерь, соответственно.Используя это уравнение, можно заметить, что по мере увеличения частоты подаваемого сигнала потери утечки и диэлектрические потери сокращаются до тех пор, пока контактное сопротивление не станет преобладающим на высоких частотах – вплоть до определенной точки. За пределами этой точки (не указанной в уравнении) ESR имеет тенденцию увеличиваться на очень высоких частотах из-за скин-эффекта переменного тока.
Многие производители конденсаторов предлагают графики, которые характеризуют значения ESR в зависимости от частоты. Например, TDK предлагает кривые ESR для большинства своих конденсаторов, а значения ESR можно получить, обратившись к этим графикам с учетом частоты переключения.
Однако, если графики ESR недоступны, ESR можно приблизительно оценить, используя общие характеристики DF, указанные в технических паспортах конденсаторов. Этот DF является полным DF конденсатора (включая все элементы потерь). Затем СОЭ оценивается следующим образом:
Какой бы метод не использовался для получения значения ESR, очевидно, что высокое ESR снижает эффективность, поскольку входные и выходные конденсаторы заряжают и разряжают переменные токи через ESR во время каждого цикла переключения. Это приводит к потерям мощности I² × R ESR .Эта потеря мощности (P CAP (ESR) ) рассчитывается как:P CAP (ESR) = I CAP (RMS) ² × ESRгде I CAP (RMS) – среднеквадратичное значение переменного тока, протекающего через конденсатор. Для понижающего выходного конденсатора в приведенном выше уравнении используется среднеквадратичное значение пульсационного тока катушки индуктивности. Среднеквадратичное значение тока в конденсаторе входного фильтра более сложное, но разумную оценку можно получить с помощью:
I CIN (RMS) = I OUT / V IN × [V OUT (V IN – V OUT )] 1/2Очевидно, что для минимизации потерь мощности конденсатора лучше всего подходят конденсаторы с низким ESR.ИИП с большими токами пульсаций особенно выигрывают от конденсаторов с низким ESR. Кроме того, поскольку ESR вносит вклад в пульсации выходного напряжения, выбор конденсатора с низким ESR дает гораздо больше преимуществ, чем просто повышение эффективности.
Как правило, различные диэлектрические материалы конденсаторов характеризуются определенным уровнем ESR. Как показывает практика, для данной емкости и номинального напряжения алюминиевые электролитические и танталовые конденсаторы показывают более высокие значения ESR, чем их керамические аналоги.ESR конденсаторов из полиэфира и полипропилена обычно находится посередине, но эти типы обычно не используются в импульсных источниках питания, поскольку для адекватных значений емкости требуется слишком большой размер корпуса.
Для данного типа конденсатора большая емкость и более низкий DF обеспечивают более низкое ESR. Корпуса большего размера также часто снижают ESR, но с электролитическими типами это иногда происходит за счет увеличения последовательной индуктивности. Керамические конденсаторы менее подвержены этому компромиссу. Кроме того, более низкое номинальное напряжение конденсатора имеет тенденцию к снижению ESR при заданном размере корпуса конденсатора.
Версия этой заметки по применению была первоначально опубликована в двух частях на веб-сайте Power Electronics Technology 13 мая 2007 г. и 29 мая 2007 г., соответственно.
Дополнительная литература
Примечание по применению, «Эквивалентное последовательное сопротивление (ESR) конденсаторов», Quadtech, Inc., www.quadtech.com.
Эйххорн, Трэвис, «Простая оценка потерь в индукторе в конструкциях источников питания», Power Electronics Technology (апрель 2005 г.).
Mohan, Ned; Унделанд, Торе М.; и Роббинс, Уильям П. Силовая электроника: преобразователи, приложения и конструкция (главы 2, 7, 20 и 22), третье издание (John Wiley & Sons, 2002).
Быстрое измерение КПД импульсных источников питания
Поскольку требования к характеристикам продукции продолжают расти, разработчикам, создающим прототипы источников питания, требуются процедуры испытаний, которые позволяют им быстро оценить эффективность своих разработок. Мы рассмотрим два относительно простых подхода к решению этой задачи – метод, использующий ваттметр для измерения входной мощности, и метод, использующий два мультиметра.Хотя ни один из этих методов не включает все необходимые шаги для проверки соответствия энергетическим стандартам, они оба предлагают эффективные способы проведения быстрой внутренней оценки.
Для выполнения этих тестов вам понадобится программируемый источник переменного тока или вариак, электронная нагрузка и либо ваттметр и два цифровых мультиметра (включая один с четырехзначным разрешением по току), либо четыре цифровых мультиметра, в том числе один с обоими истинными среднеквадратичными значениями. и высокое разрешение для измерения входного тока, а второе – с помощью измерителя высокого разрешения для измерения выходного тока.
Начнем с того, что эффективность источника питания рассчитывается как отношение выходной мощности к входной, или:
КПД источника питания = выходная мощность / входная мощность
Мощность постоянного тока рассчитывается как вольты, умноженные на амперы, и ее можно легко измерить с помощью двух мультиметров. Мультиметр высокого разрешения измеряет ток, подаваемый на нагрузку, а стандартный мультиметр измеряет выходное напряжение источника питания.
Входная мощностьпеременного тока не может быть рассчитана просто как среднеквадратичное значение входного напряжения, умноженное на действующее значение входного тока, из-за разницы фаз между напряжением и током в системе переменного тока, обозначенной как ϕ и показанной на рисунке 1.Если бы мы сделали это, это даст слишком высокий результат, потому что значение будет включать как мощность, преобразованную источником питания (P), так и мощность, возвращаемую источнику переменного тока (Q).
Чтобы рассчитать КПД, мы должны измерить только мощность, которая фактически преобразуется источником питания, как показано на рисунке 2. Для этого нам нужно умножить измеренную полную мощность S на коэффициент мощности: cos (ϕ) .
Поскольку измерить фазовый угол без осциллографа сложно, самым простым и точным способом измерения входной мощности переменного тока является использование ваттметра.Ваттметр внутренне измеряет фазовый угол и применяет его к окончательному измерению. Это наиболее точный способ измерения мощности переменного тока. Если вы планируете проводить много таких измерений, настоятельно рекомендуется использовать ваттметр. Если у вас нет доступа к одному, второй обсуждаемый здесь метод заключается в использовании двух мультиметров для измерения входного постоянного напряжения и тока после мостового выпрямителя. Этот метод менее точен и требует больше времени, поскольку он предполагает физическое размыкание цепи проверяемого источника питания.
Тестируемая система
Следующие примеры выполнены с реальным, работающим источником питания, построенным в соответствии со схемой, показанной на рисунке 3.
Измерение выходной мощности
Обе процедуры тестирования, упомянутые выше, используют один и тот же метод измерения выходной мощности: мультиметр высокого разрешения для измерения тока, подаваемого на нагрузку, и стандартный мультиметр для измерения выходного напряжения источника питания. Мы не хотим измерять падение напряжения в кабелях, соединяющих источник питания с нагрузкой, если это специально не требуется.Во избежание этого подключайте вольтметр непосредственно к выходным клеммам питания, а не к входным клеммам нагрузки. Затем подключите электронную нагрузку и последовательно подключите к ней измеритель тока с высоким разрешением для измерения выходного тока. Обратите внимание, что некоторые приложения, такие как зарядные устройства для мобильных телефонов или адаптеры для ноутбуков, фактически требуют учета потерь в нагрузочных кабелях. В этих случаях измеритель напряжения следует подключать на конце выходных кабелей.
Рекомендации по включению переменного тока
Если вы используете устройство со схемой включения / выключения, такое как LinkSwitch или TinySwitch, вы можете получить измерения эффективности в худшем случае при включении источника питания к испытательному входному напряжению с полной нагрузкой, приложенной к выходу.Однако вы должны знать, что включение источника питания создаст большой пусковой ток при зарядке конденсатора большой емкости. Если вы выполняете этот тест с помощью мультиметров вместо ваттметра, это может привести к перегоранию предохранителя вашего измерителя входного тока при установке на низкий диапазон.
Вы можете минимизировать риск повреждения вашего измерителя, убедившись, что он настроен на самый высокий диапазон тока перед включением вашей системы. Если вы тестируете мощную систему или имеете большую объемную емкость, этого может быть недостаточно для защиты предохранителя мультиметра.Поэтому всегда начинайте метод тестирования мультиметра с измерения пускового постоянного тока источника питания, когда он включается при минимальном заданном входном напряжении с максимальной подключенной нагрузкой. Затем сравните этот измеренный пиковый ток с таблицей данных мультиметра, чтобы убедиться, что он может выдерживать необходимое количество пикового тока во время включения. Обратите внимание: если вы используете ваттметр, вы можете пропустить этот тест.
Для всех других схем управления без включения / выключения, таких как управление ШИМ, метод включения не влияет на измерения эффективности.В этих случаях следует медленно увеличивать напряжение переменного тока при включении, чтобы ограничить пусковой ток. Это позволит вам использовать более точную настройку нижнего диапазона цифрового мультиметра, не перегорая его предохранитель.
(PDF) Расчет выбора трансформатора для проектирования импульсного источника питания с обратным ходом
Содержимое этой работы может использоваться в соответствии с условиями лицензии Creative Commons Attribution 3.0.Любое дальнейшее распространение
этой работы должно содержать указание на автора (авторов) и название работы, цитирование журнала и DOI.
Опубликовано по лицензии IOP Publishing Ltd
MEACM 2018
IOP Conf. Серия: Материаловедение и инженерия 544 (2019) 012054
IOP Publishing
doi: 10.1088 / 1757-899X / 544/1/012054
1
Расчет выбора трансформатора для конструкции Flyback
Импульсный источник питания
Хао Ни1, Айся Ву2 *, Синь Чжан3, Руолин Руань4, Юнхонг Ху5 и Вэй Чжан6
1 Доцент, Хубэйский университет науки и технологий, Сяньнин, КНР
2 * Преподаватель, Хубэйский университет науки и технологий, Сяньнин, КНР
3 Генеральный директор, Hubei Tongda Power Supply Company Limited, Xianning, PRC
4 Профессор, Хубэйский университет науки и технологий, Xianning, PRC
5 Профессор, Hubei University of Science and Technology, Xianning, PRC
6 Старший инженер , Хубэйский университет науки и технологий, Сяньнин, КНР
Эл. Почта: 278928643 @ qq.com
Аннотация. Широтно-импульсная модуляция (ШИМ) – один из самых популярных методов создания импульсных источников питания
. В этой статье описана основа для разработки нового импульсного источника питания обратного хода
,с интегральной схемой ШИМ. Для удовлетворения проектных требований,
,, подробно обсуждается важный этап расчета выбора трансформатора. Метод P
– это
, используемый при расчете трансформатора. Затем пошагово вычисляются некоторые другие параметры трансформатора, такие как коэффициент трансформации
,, первичный ток трансформатора, индуктивность первичной обмотки трансформатора, виток трансформатора
,и воздушный зазор, а также диаметр провода обмотки.
Предлагаемый импульсный источник питания с выбранным трансформатором имеет более простую схему и более высокую точность
. Различные диапазоны входного и выходного напряжения, необходимые для различных электроприборов
, могут быть вполне удовлетворены.
1. Введение
При разработке импульсных источников питания эффективность является одним из наиболее важных показателей.
Пока КПД бытовых импульсных источников питания в основном составляет около 70%. Чтобы ответить на призыв
об экономии энергии и сокращении выбросов в Китае, концепция дизайна будущего импульсного источника питания
должна быть сосредоточена на сокращении потерь и повышении эффективности при проектировании.Потери импульсного источника питания
состоят из потерь входного выпрямителя, потерь переключения, потерь в буферной цепи, потерь проводимости
,, потерь в трансформаторе и индуктивности и т. Д. Помимо потери входного выпрямителя, могут быть все другие потери
. уменьшенный. В эти годы относительно новой технологией является использование переключающего синхронного выпрямителя
при нулевом напряжении / нулевом токе для уменьшения потерь переключения и потерь привода сети синхронного выпрямителя
[1-2]. В будущем можно будет использовать управление скачкообразной перестройкой периода для уменьшения малой нагрузки и потерь в режиме ожидания.
Есть много способов повысить эффективность, например пассивная демпферная схема без потерь, синхронный выпрямитель
, микросхема управления малой мощностью и так далее. Топология Flyback оказалась эффективным решением для импульсного источника питания
,, благодаря его низкой стоимости и высокой эффективности [3]. Например, адаптеры и зарядные устройства для ноутбуков AC-DC
реализованы с помощью преобразования мощности с широтно-импульсной модуляцией (ШИМ).
Следовательно, чтобы повысить эффективность и уменьшить потери, в этой статье предлагается новый источник питания
,обратного переключения для электронных устройств с низким энергопотреблением.
Остальная часть этого документа организована следующим образом. Во-первых, принципы работы будут предложены в Разделе
,2. Во-вторых, индикаторы проектирования и структура системы будут описаны в Разделе 3.
