Как подключить шаговый двигатель с 4, 6, 8 выводами
Новости
График работы 8 марта 2023 года Уважаемые покупательницы и покупатели! Поздравляем с наступающим праздником – Международным женским днем 8 Марта! 7 марта – рабочий день с 8.00 до 15.30. 8 марта – выходной день. График работы 23 и 24 февраля 2023 года Уважаемые покупатели! Обращаем ваше внимание, что 22 февраля рабочий день с 8.00 до 15.30, 23, 24, 25, 26 февраля – выходные дни. График работы 30 января 2023 г. Уважаемые покупатели! В связи с профилактическими работами в понедельник 30 января мы работаем с 12.00. Благодарим за понимание. Читать все новости
Как подключить шаговый двигатель с 4, 5, 6 и 8 выводами к драйверу.
В предыдущих статьях мы рассматривали процесс выбора шагового электродвигателя (см. статью«Как выбрать шаговый двигатель») в зависимости от способа его применения. В данной статье мы подробно рассмотрим как подключить шаговый двигатель.
Шаговые электродвигатели могут поставляться с несколькими вариантами схем подключения. Выбор схемы будет определяться типом двигателя. Большинство наиболее распространенных шаговых двигателей имеют схемы, предполагающие использование 4-х, 5-ти, 6-ти или 8-ми проводов.
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 4 ВЫВОДАМИ
Если в вашем распоряжении имеется шаговый двигатель, подключаемый при помощи только четырех проводов, это означает, что в нем две обмотки, это биполярный мотор и вы сможете использовать его только с биполярным драйвером. Обратите внимание на то, что каждая из фазных обмоток содержит пару проводов — для идентификации каждого провода используйте тестер (мультиметр).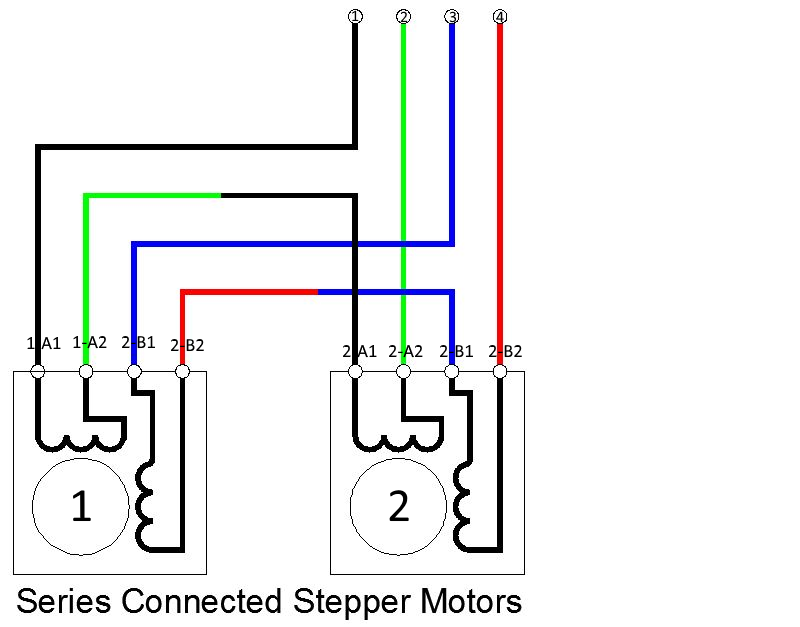
Найдите замкнутые между собой провода(которые прозваниваются) и подключите их к шаговому двигателю. Лучше сразу свяжите их вместе, чтобы не повторять операцию постоянно
КАК ПОДКЛЮЧИТЬ УНИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ С 6 ВЫВОДАМИ
Также, как и шаговый двигатель с четырехконтактным соединением, униполярный двигатель с 6 проводами имеет пару проводов для каждой обмотки. Однако, он также имеет центральный вывод для каждой обмотки, что дает возможность подключать его как в качестве биполярного шагового двигателя, так и в качестве однополярного.
Для того, чтобы подключить шаговый двигатель с 6 выводами, с помощью тестера разделите все провода на три группы, замкнутые между собой, а затем найдите центральные выводы, измеряя сопротивление между проводами. Если вы хотите подключить ваш электродвигатель к униполярному драйверу, используйте все шесть проводов.
Подключение к биполярному драйверу(коих подавляющее большинство) потребует от вас использования только одного конца провода с одним выводом и одного центрального вывода для подключения к каждой обмотке.
Схема подключения шагового электродвигателя с 5-ю выводами очень похожа на схему подключения с 6-ю контактами. Главное ее отличие состоит в том, что центральные выводы замкнуты между собой внутри, соединяясь в один провод. Это обеспечивает работу электродвигателя только по однополярной схеме.
Кроме того, определить обмотки можно только методом проб и ошибок; лучше всего попытаться найти центральный вывод, так как его сопротивление составляет половину от сопротивления других проводов.
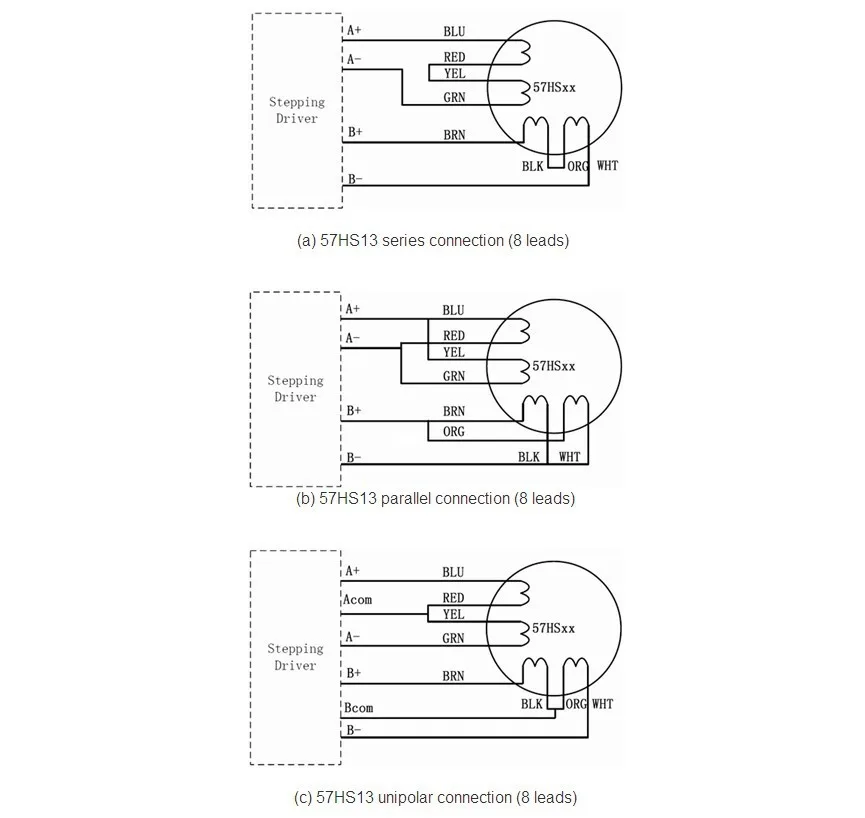
КАК ПОДКЛЮЧИТЬ ШАГОВЫЙ ДВИГАТЕЛЬ С 8 ВЫВОДАМИ
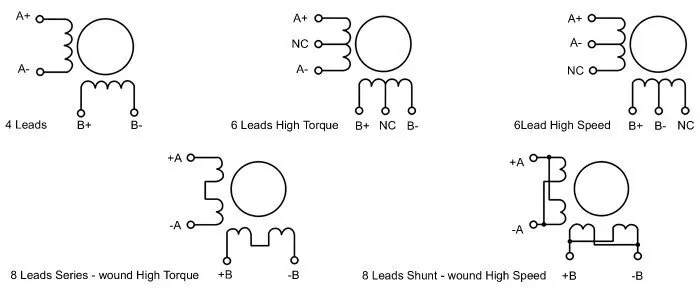
Наконец, существуют шаговые электродвигатели, подключаемые при помощи 8-ми проводов. Для того, чтобы понять, как подключить шаговый двигатель с 8 выводами, мы должны вернуться к инструкциям выше.Их схема подключения во многом схожа со схемой, предполагающей использование 6-ти проводов. Разница между ними состоит в том, что две фазы разделены на две отдельных обмотки. Имея указанную схему, вы сможете подключить шаговый двигатель по однополярной схеме, а также иметь три различные комбинации для биполярного подключения.
Имея указанную схему, вы сможете подключить шаговый двигатель по однополярной схеме, а также иметь три различные комбинации для биполярного подключения.
- Последовательно соединив обмотки(увеличится индуктивное и активное сопротивление, а также момент, упадет максимальная скорость)
- Параллельно (из-за меньшей индуктивности будет меньше момент и выше скорость)
- Соединив обмотки параллельно, можно использовать униполярное подключение, как для 6-выводного шагового мотора
Ссылки:
Как настроить ЧПУ станок
Униполярный и биполярный шаговый двигатель
DARXTON
Новости
График работы 8 марта 2023 года
Уважаемые покупательницы и покупатели! Поздравляем с наступающим праздником – Международным женским днем 8 Марта! 7 марта – рабочий день с 8.
Контроллер шагового двигателя SMSD-822 ver.2 с напряжением питания 220В
Заказать
Описание в PDF
| Напряжение питания переменного тока, В | 110 – 220 |
| Напряжение питания постоянного тока, В | 70 – 200 |
| Максимальный выходной ток, А | 8,0 |
| Коэффициент дробления полного шага | 1/2…1/256 |
| Количество каналов управления шаговыми двигателями | 1 |
| Точность установки частоты, % | не хуже 0,2 |
Скачать паспорт .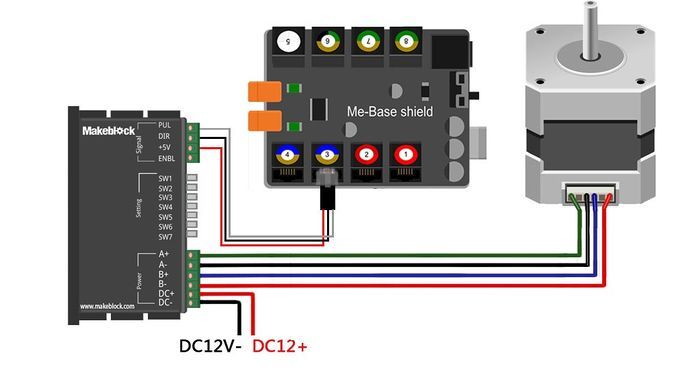 pdfОписание .pdf Программа .zip
pdfОписание .pdf Программа .zip
Программируемый контроллер SMSD‑822 ver.2 предназначен для управления работой гибридного двух- или четырехфазного шагового двигателя с током фазы от 5.5А до 8.0А. Контроллер имеет пять режимов работы, а также позволяет настраивать смещение тока подключенного двигателя для обеспечения равномерности движения и уменьшения шумов во время работы. Контроллер имеет возможность осуществлять дробление шага до 1/256.
Режимы управления
- Аналоговое управление скоростью встроенным потенциометром, внешним потенциометром или аналоговым сигналом 0…5В;
- Импульсное управление положением внешними сигналами «ШАГ», «НАПРАВЛЕНИЕ», «РАЗРЕШЕНИЕ» или двухфазным квадратурным сигналом, со смещением фаз 90°;
- Следящий режим – аналоговое управление положением – управление внешним сигналом 0-5В или потенциометром;
- Автономная работа по заданной программе – запись программы в энергонезависимую память блока с ПК и дальнейшая автономная отработка сохраненной последовательности команд.
 Внешний контроллер или компьютер в этом режиме не требуются;
Внешний контроллер или компьютер в этом режиме не требуются; - Программное управление в режиме реального времени (directcontrol) – непосредственное управление командами с ПК или ПЛК в режиме реального времени.
Описание функций
- В режиме контроллера для синхронизации работы блока с другим оборудованием предусмотрено 4 программируемых входа/выхода, также доступна функция «поиска нулевого положения»;
- Для управления блоком в режиме контроллера предназначена программа SMC-Program, или иная программа, обеспечивающая передачу данных по последовательному интерфейсу;
- Для управления скоростью в режиме аналогового управления предусмотрен вход для подачи сигнала 0–5В, направление вращения изменяется по датчику «Реверс», предусмотрен вход для подключения аварийного датчика.
Конструкция контроллера шагового двигателя SMSD‑822 ver.
 2.
2.Контроллер SMSD‑822 ver.2 выполнен в виде печатной платы с расположенными на ней электронными компонентами, элементами индикации, органами управления, клеммами и разъемами. Печатная плата установлена на теплоотводящий радиатор и защищена металлической крышкой с нанесенными на нее условными графическими изображениями органов управления и пояснительными надписями.
- винтовые клеммы для подключения источника питания;
- шаговый двигатель;
- разъем на 25 контактов для подключения входных/выходных сигналов;
- кнопки пуска «START», сброса «RESET», функции поиска нуля «HOME»;
- потенциометр регулировки скорости и настройки работы шагового двигателя, а также для управления положением в следящем режиме: «SPEED/TUNING»;
- микропереключатели SW1 – SW8;
- два светодиодных индикатора;
- разъем USB для связи с компьютером;
- винт для подключения клеммы защитного заземления «PE».
Описание контроллера SMSD‑822 ver.2
Настройка контроллера для плавной и тихой работы шагового двигателя
Контроллер SMSD‑822 ver.2 имеет режим “Tuning” используется при первоначальном подключении или замене шагового двигателя. Он обеспечивает настройку смещения токов в фазах ШД и позволяет добиться равномерности вращения и уменьшения акустических шумов. Режим настройки простой и может использоваться неподготовленными пользователями. После подачи питания и начала работы двигателя в режиме “Tuning” потенциометром SPEED/TUNINGпроизводится регулировка для наиболее плавного вращения вала двигателя с минимальной вибрацией и шумом.
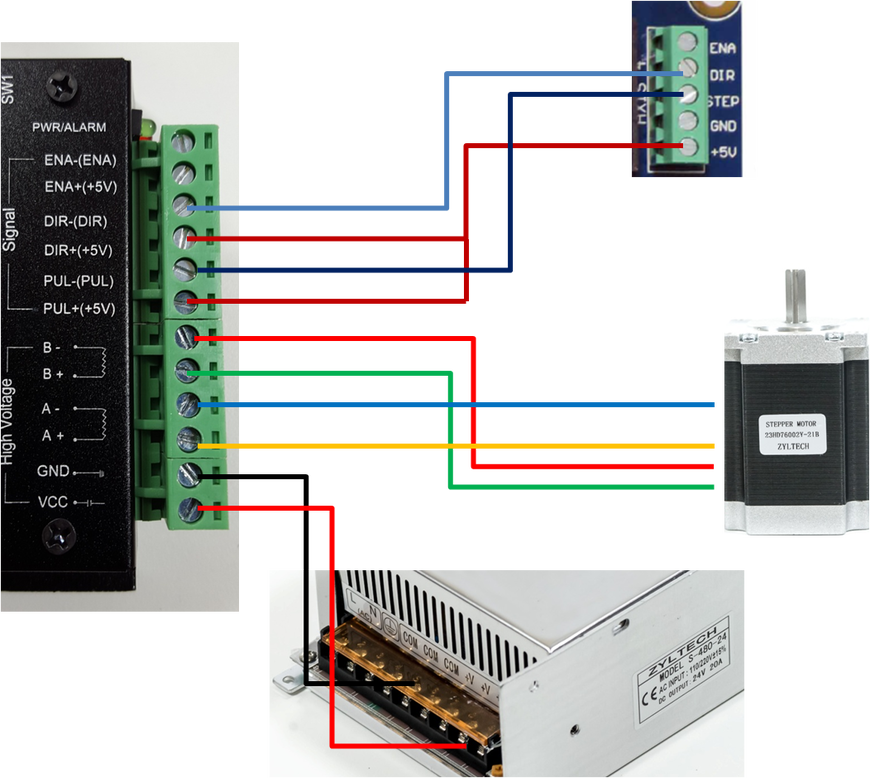
Подключение шагового двигателя к контроллеру SMSD‑822 ver.2
Подключение шагового двигателя к контроллеру SMSD‑822 ver.2.
Заземление блока. Подача питания. Режим настройки блока.
Управление шаговым приводомв режиме аналогового регулирования скорости
В следящем режиме контроллер позволяет управлять положением вала двигателя потенциометром или аналоговым сигналом 0…5В.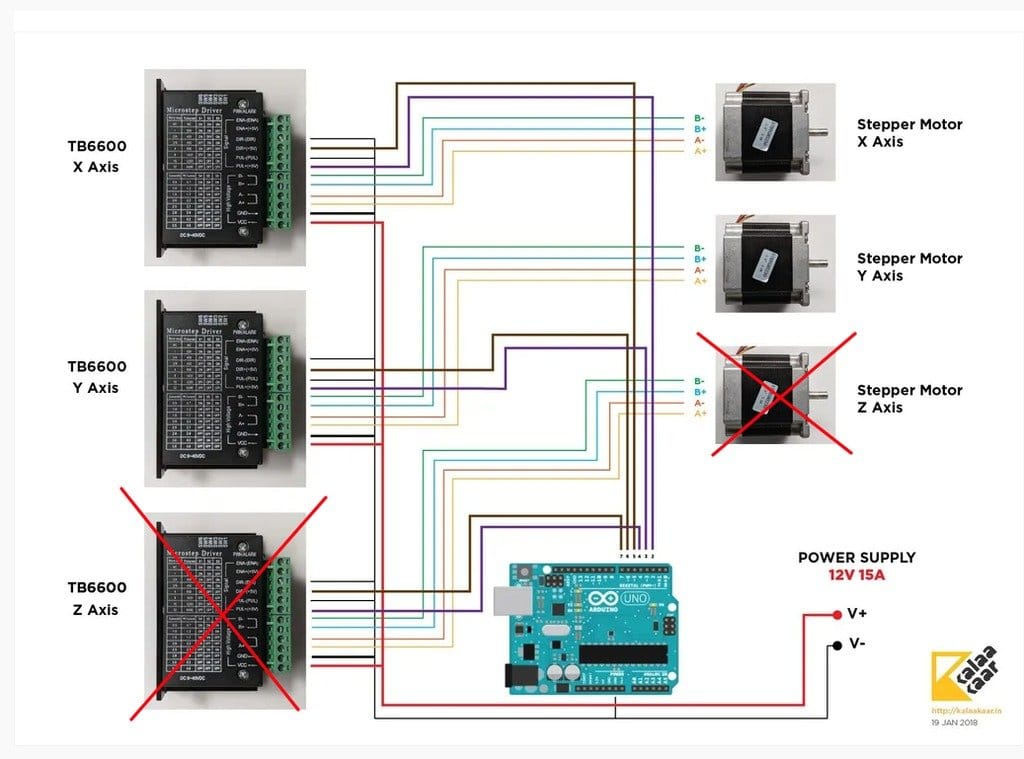 Режим широко используется в системах видеонаблюдения, в оборудованиипозиционирования антенни других подобных устройствах.
При входе контроллера в следящий режим нулевая координата определяется положением встроенного (или внешнего) потенциометра или напряжением, поданным на входы контроллера. При использовании потенциометра(встроенного или внешнего) для регулирования угла поворотавала двигателя удобно установить его в среднее положение, а при использовании внешнего напряжения подать на управляющий вход 2.5В. Это позволит задавать перемещение вала двигателя в обе стороны. Положительное приращение напряжения будет соответствовать вращению в одну сторону, отрицательное — вращению в другую сторону.
Режим широко используется в системах видеонаблюдения, в оборудованиипозиционирования антенни других подобных устройствах.
При входе контроллера в следящий режим нулевая координата определяется положением встроенного (или внешнего) потенциометра или напряжением, поданным на входы контроллера. При использовании потенциометра(встроенного или внешнего) для регулирования угла поворотавала двигателя удобно установить его в среднее положение, а при использовании внешнего напряжения подать на управляющий вход 2.5В. Это позволит задавать перемещение вала двигателя в обе стороны. Положительное приращение напряжения будет соответствовать вращению в одну сторону, отрицательное — вращению в другую сторону.
Переключение направления вращения двигателя осуществляется изменением уровня сигнала на входе DIR. Передвижение на один шаг осуществляется по фронту импульса на входе PUL. Аварийная остановка двигателя (снятие питания с фаз двигателя) осуществляется высоким уровнем сигнала на входе EN (EN и COM замкнуты), снятие сигнала приводит к возобновлению работы. При нажатии на кнопку RESET или замыкании дублирующих входов (RESET и COM) также происходит остановка двигателя и снятие питания с фаз — сигнал работает по уровню.
При нажатии на кнопку RESET или замыкании дублирующих входов (RESET и COM) также происходит остановка двигателя и снятие питания с фаз — сигнал работает по уровню.
Управление блоком в ручном режиме
Импульсное управления шаговым приводом
В режиме импульсного управления на входы контроллераподается последовательность сигналов ШАГ (входы PUL), НАПРАВЛЕНИЕ (входы DIR), РАЗРЕШЕНИЕ (вход EN). Входы PUL и DIR двунаправленные, полярность подключения сигналов не важна. Пример схемы подключения приведен на рисунках далее.
Переключение направления вращения двигателя осуществляется изменением уровня сигнала на входе DIR. Передвижение на один шаг осуществляется по фронту импульса на входе PUL. Аварийная остановка двигателя (снятие питания с фаз двигателя) осуществляется высоким уровнем сигнала на входе EN (EN и COM замкнуты), снятие сигнала приводит к возобновлению работы. При нажатии на кнопку RESET или замыкании дублирующих входов (RESET и COM) также происходит остановка двигателя и снятие питания с фаз — сигнал работает по уровню.
Передвижение на один шаг осуществляется по фронту импульса на входе PUL. Аварийная остановка двигателя (снятие питания с фаз двигателя) осуществляется высоким уровнем сигнала на входе EN (EN и COM замкнуты), снятие сигнала приводит к возобновлению работы. При нажатии на кнопку RESET или замыкании дублирующих входов (RESET и COM) также происходит остановка двигателя и снятие питания с фаз — сигнал работает по уровню.
Использование шагового привода в режиме слежения
В следящем режиме контроллер позволяет управлять положением вала двигателя потенциометром или аналоговым сигналом 0…5В. Режим широко используется в системах видеонаблюдения, в оборудованиипозиционирования антенни других подобных устройствах.
При входе контроллера в следящий режим нулевая координата определяется положением встроенного (или внешнего) потенциометра или напряжением, поданным на входы контроллера.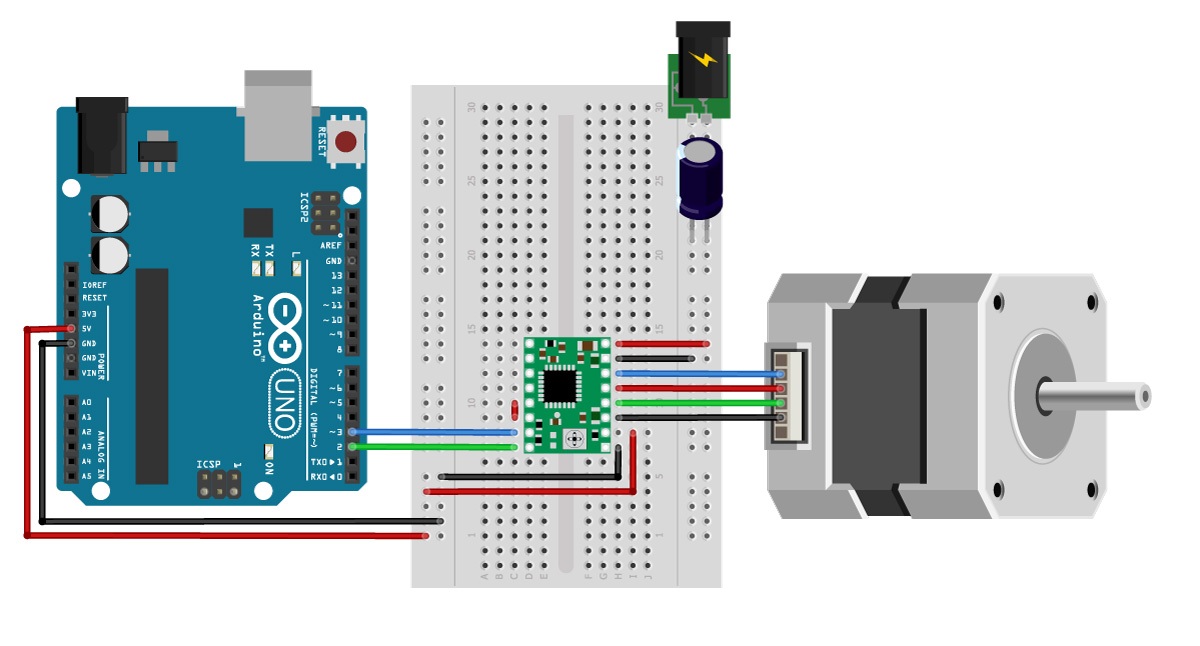 При использовании потенциометра(встроенного или внешнего) для регулирования угла поворотавала двигателя удобно установить его в среднее положение, а при использовании внешнего напряжения подать на управляющий вход 2.5В. Это позволит задавать перемещение вала двигателя в обе стороны. Положительное приращение напряжения будет соответствовать вращению в одну сторону, отрицательное — вращению в другую сторону.
При использовании потенциометра(встроенного или внешнего) для регулирования угла поворотавала двигателя удобно установить его в среднее положение, а при использовании внешнего напряжения подать на управляющий вход 2.5В. Это позволит задавать перемещение вала двигателя в обе стороны. Положительное приращение напряжения будет соответствовать вращению в одну сторону, отрицательное — вращению в другую сторону.
Переключение направления вращения двигателя осуществляется изменением уровня сигнала на входе DIR. Передвижение на один шаг осуществляется по фронту импульса на входе PUL. Аварийная остановка двигателя (снятие питания с фаз двигателя) осуществляется высоким уровнем сигнала на входе EN (EN и COM замкнуты), снятие сигнала приводит к возобновлению работы. При нажатии на кнопку RESET или замыкании дублирующих входов (RESET и COM) также происходит остановка двигателя и снятие питания с фаз — сигнал работает по уровню.
Подключение управляющих сигналов в следящем режимеВеличину ускорения, начальную и конечную скоростиперемещения для следящего режима можно задаватькомандойс компьютера по коммуникационному интерфейсу. Также можно указывать масштаб сигнала, который определяет полный диапазон перемещения. Все эти команды сохраняются в памяти блока и дальнейшего подключения к компьютеру в данном режиме не требуется.
Также можно указывать масштаб сигнала, который определяет полный диапазон перемещения. Все эти команды сохраняются в памяти блока и дальнейшего подключения к компьютеру в данном режиме не требуется.
Пример задания масштаба: Задаётся команда масштабирования SC1000*. Поданное управляющее аналоговое напряжение 2.5В считается за нулевую координату. Изменяя напряжение от 2.5В до 5В, можно повернуть вал двигателя в одну сторону на 500 шагов; изменяя напряжение от 2.5В до 0В, можно повернуть вал двигателя на 500 шагов в другую сторону.Шаги в данном случае — это шаги с учётом выставленного дробления. Описание всех команд приведено в технической документации блока.
Использование режимов драйвера и слежения на блоке управления шаговым двигателем SMSD‑822 ver.2
Использование шагового привода в режиме слежения
Существует два возможных способа работы в режиме контроллера: управление в режиме реального времени (directcontrol) и автономная работапо программе.
Для работы в режиме реального времени необходимо постоянное соединение блока управления SMSD—822 ver.2 с компьютером. При этом каждую полученную от компьютера команду контроллер отрабатывает немедленно. При автономной работе необходима предварительная запись исполнительной программы в память блока, после чего возможна работа без подключения к компьютеру. Для составления и записи программы в контроллер, а также для передачи команд в режиме реального времени можно использовать программу SMC-Program (предоставляется при покупке контроллера, а также доступна для скачивания с нашего сайта), либо другое ПО, предоставляющее возможность передачи данных по последовательному интерфейсу.
Функция поиска начального положения: в режиме контроллера предусмотрена функция поиска начального положения. Для запуска поиска начального положения можно воспользоваться кнопкой HOME или замыкать контакты, подключенные к дублирующим входам HOME/COM. Также поиск начального положения можно инициировать командой от компьютера. Сигнал HOME работает по фронту. Остановка осуществляется поступлением сигнала на вход “0”/COM, к которому подключается концевой выключатель.Остановка также осуществляется при нажатии кнопки RESETили замыкании дублирующих входов RESET/COM. Если функция поиска начального положения была запущена кнопкой HOME или замыканием дублирующих клемм, скорость перемещения регулируется потенциометром SPEED во время движения; если функция была запущена командой, скорость можно задавать командой. Изменение направления вращения осуществляется подачей сигнала на вход DIR — сигнал работает по фронту.
Подключение входных управляющих сигналов при использовании блока в режиме контроллера Подключение сигналов IO1, IO2, IO3, IO4 в качестве входов при использовании блока в режиме контроллера Подключение сигналов IO1, IO2, IO3, IO4 в качестве выходов при использовании блока в режиме контроллераГабаритные размеры драйвера шаговых двигателей SMSD‑822 ver.
 2
2Связаться с нами
Хотите узнать дополнительную информацию о продукции — задайте вопрос. Наш специалист свяжется с вами в ближайшее время.
Подключение шагового двигателя. Как определить пары проводки катушки двигателя
Подключение шагового двигателя. Как определить пары проводки катушки двигателя
Мы заметили, что на многих форумах, в группах facebook и других, где собирается большое количество начинающих любителей DIY, очень часто обсуждается тема шаговых двигателей, использования и настройки.
На нашем YouTube-канале было много вопросов о проблемах с шаговым двигателем. Самая распространенная проблема — как подключить шаговый двигатель. Эта веха для многих людей мешает им продолжать работу над проектом.
При неправильном подключении проводов обычно наблюдается один или несколько из следующих симптомов:
- Шаговый двигатель работает случайным образом в неправильном направлении (туда-сюда).

- Иногда он идет в определенном направлении, а иногда нет.
- Двигатель вибрирует в одном месте.
- Двигатель трясется и дергается.
- Нет крутящего момента.
- Двигатель гудит громко и определенно не так, как мы ожидаем – он мягко гудит.
В этом случае у вас есть несколько вариантов:
- Проверьте, правильно ли вы определили пары катушек.
- Проверьте, все ли кабели в рабочем состоянии (они не оборваны и правильно подключены к винтовым клеммам).
- Проверить работу контроллера.
Посмотрите наш специальный видеоурок
Пошаговое подключение шагового двигателя.
ИДЕНТИФИКАЦИЯ КАБЕЛЯ КАБЕЛЯ КАТУШКИ ШАГОВОГО ДВИГАТЕЛЯ
Шаговый двигатель представляет собой разновидность бесщеточного двигателя.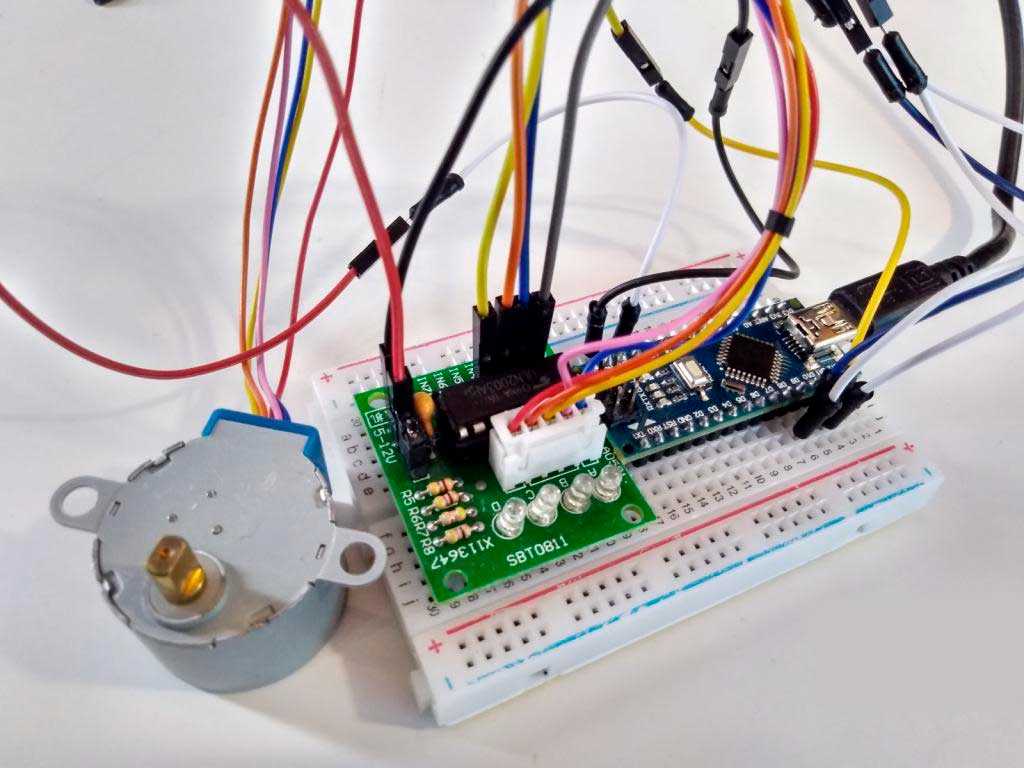
Этот двигатель состоит из ротора с магнитом и двух стабильных катушек внутри корпуса (в этой статье мы используем биполярный двигатель – 4 провода).
Представьте катушки внутри двигателя.
Это выглядит примерно так, как показано на упрощенном рисунке ниже.
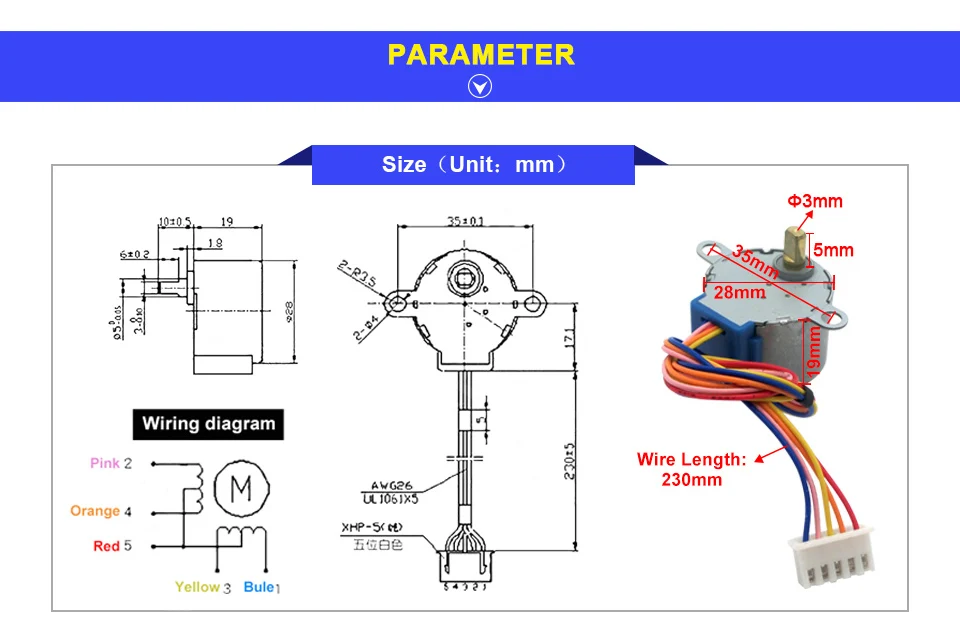
Провода, выходящие из двигателя, помечены желтым, зеленым, красным и синим цветом (и это чаще всего тот цвет, с которым мы имеем дело). Катушки – это те провода, которые скручены (коричневые).
Драйверы шаговых двигателей управляют двигателем, переключая питание на эти две катушки.
Для правильной работы двигателя провода двигателя должны быть подключены к соответствующим выходам контроллера. Бывает, что производитель двигателя меняет цвета кабелей или подключает их иначе, как на схеме, которую можно найти на сайте производителя. В такой ситуации мы должны сами определить пары подходящих проводов. Существует несколько методик определения проводов, но проще всего использовать мультиметр.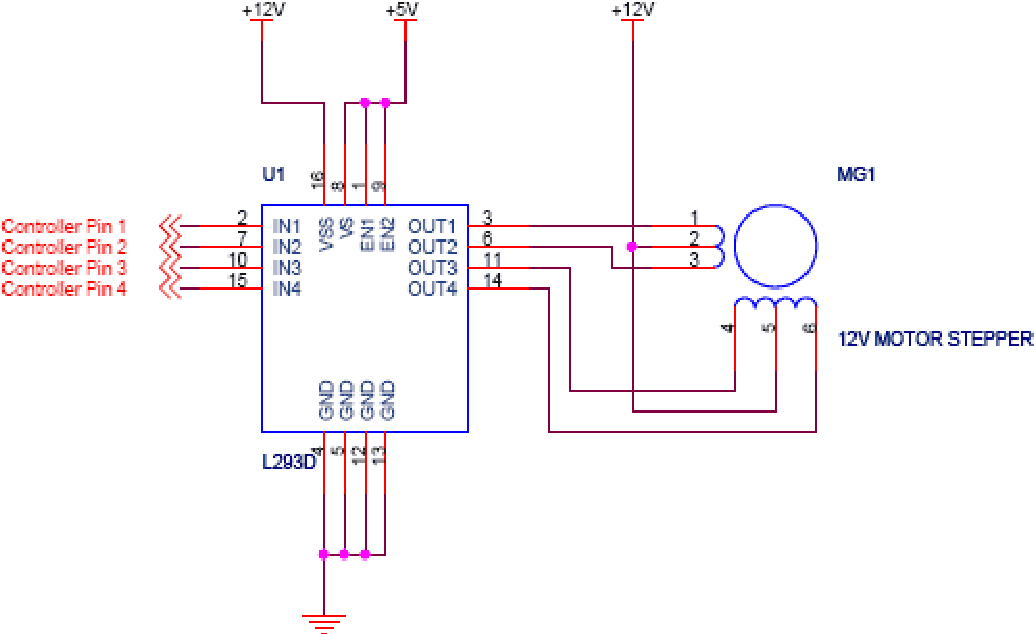
ИДЕНТИФИКАЦИЯ ШАГОВОГО ДВИГАТЕЛЯ С ПОМОЩЬЮ МУЛЬТИМЕТРА
Сначала установите мультиметр в положение проверки диодов (как показано на рисунке ниже). Чтобы проверить, правильно ли работает ваш мультиметр, соедините щупы мультиметра вместе. Если все работает правильно, мультиметр должен издать звуковой сигнал. Когда щупы отсоединены, мультиметр должен показывать на дисплее «1».
Итак, приступим к процедуре тестирования нашего шагового двигателя.
- Выберите случайный провод шагового двигателя и коснитесь его черным/отрицательным щупом на мультиметре.
- Выберите один из трех других проводов и коснитесь его красным/плюсовым щупом мультиметра. У вас есть 33% шанс найти пару данной катушки с первой попытки :). Однако давайте предположим, что вы это пропустили — см. рисунок ниже, на котором мы представили нашу первую неудачную попытку.
- Проверьте другой провод.
Держите черный щуп с первым выбранным кабелем с самого начала и используйте красный щуп, чтобы коснуться другого провода.
Как видно на графике ниже, если мы снова пропустили нужный провод с красным щупом, мультиметр не издаст ни звука, а на дисплее все равно будет отображаться цифра «1».
- Если снова не получилось, подключаем красный щуп к последнему проводу, который мы еще не выбрали, и здесь статус мультиметра должен измениться. Мультиметр может издать негромкий писк, а на дисплее вместо цифровой единицы появится другая цифра.
Этот номер не имеет большого значения, важно то, что он считывает небольшое значение.
Значит именно эти два провода составляют пару катушек.
Отделите их от остальных и подключите к разъемам драйвера шагового двигателя A+/A-
- Теперь проверьте, образуют ли пару другие два провода – прикоснитесь к одному из них черным щупом, а к другому один с красным щупом.
Если провода образуют пару, мультиметр снова изменит цифру 1 на дисплее на другую цифру/цифру и дополнительно может издать негромкий писк.
Предполагая, что все в порядке, вы можете подключить эту пару проводов к клеммам B + и B- контроллера.
Однако, если мультиметр не меняет своего состояния, это может означать, что у вас поврежден мультиметр или поврежден двигатель (например, оборваны провода от катушки катушки).
В этом случае, чтобы быть абсолютно уверенным, что что-то сломалось и вы все сделали правильно, повторите процедуру.
КАК ПРОВЕРИТЬ КАБЕЛИ ШАГОВОГО ДВИГАТЕЛЯ БЕЗ ИНСТРУМЕНТОВ?Метод с мультиметром самый лучший, но мы понимаем, что не у всех есть мультиметр. Что делать, если у нас дома нет мультиметра?
Как проверить пары проводов без дополнительных инструментов?
Здесь мы представим вам еще один «ручной» метод, но мы должны отметить, что он не всегда должен работать.
Скрутите два случайных провода.
Начните с соединения двух случайных проводов двигателя вместе — вы можете просто коснуться их вместе или скрутить.
 (см. рисунок ниже).
(см. рисунок ниже).Если соединенные между собой провода относятся к одной катушке, они будут “создавать” магнитное поле в двигателе при попытке вручную провернуть вал.
Это будет ощущаться по повышенному сопротивлению вращению вала, или вы можете ощущать легкое подпрыгивание. Однако, если вал слегка проворачивается и вы не чувствуете разницы между соединенными и разомкнутыми проводами, то выбранная пара проводов не принадлежит одной катушке.
Проверьте другую комбинацию проводов.
Отсоедините ранее выбранные кабели и подключите их к другой паре.
На рисунке ниже снова показаны неправильно выбранные провода, поэтому мы не чувствуем никакого сопротивления при вращении вала.
Найдите правильную пару проводов шагового двигателя
Если вы не нашли пару в предыдущих попытках, снова отсоедините провода и соедините их в другой комбинации.
 Если вы не меняли один провод все время (как видно на графике, желтый провод ранее тестировался с красным и синим проводом), то последняя попытка с зеленым проводом, например, должна быть успешной. (Если не сломан ни один кабель или сам двигатель)
Если вы не меняли один провод все время (как видно на графике, желтый провод ранее тестировался с красным и синим проводом), то последняя попытка с зеленым проводом, например, должна быть успешной. (Если не сломан ни один кабель или сам двигатель)Если вы чувствуете сопротивление при вращении вала, вы нашли пару проводов на одну катушку!
Отложите их в сторону, отсоедините и соедините вместе два других провода. – поведение двигателя должно быть идентично поведению ранее правильно выбранной пары проводов.
Теперь можно подключить их первую пару с выходами A+/A- драйвера и вторую пару с выходами B+/B-
шаговые двигатели [smoothieware.org]
Немного теории:
«Шаговый двигатель (или шаговый двигатель) представляет собой бесщеточный электродвигатель постоянного тока, который делит полный оборот двигателя на несколько равных шагов.
Затем можно дать команду двигателю перемещаться и удерживаться на одном из этих шагов без какого-либо датчика обратной связи (контроллер с разомкнутым контуром). » (Википедия)
Поскольку они работают пошагово, и вы можете точно контролировать, сколько шагов вы двигаете в каждом направлении, шаговые двигатели — это очень практичный способ перемещения вещей в желаемое положение. Это делает их идеальными для большинства приложений с ЧПУ.
Smoothie поставляется с драйверами шаговых двигателей, предназначенными для биполярных шаговых двигателей, с максимальным номинальным током 2 ампера.
Выбор шаговых двигателей
Существует очень большое разнообразие шаговых двигателей. Моторы большего размера, как правило, более мощные. Для данного размера двигатели будут иметь разные крутящие моменты, максимальные скорости и разные возможности для поддержания крутящего момента при увеличении скорости.
Важно правильно выбрать двигатель для своего применения. Наиболее распространенной ошибкой является выбор двигателя с высокой индуктивностью. Существует два основных «семейства» двигателей: двигатели с высокой индуктивностью в основном предназначены для поддержания положения и редкого перемещения (например, на монтировке телескопа), а двигатели с низкой индуктивностью предназначены для частого перемещения на высоких скоростях (например, на монтировке телескопа). фрезерный станок с ЧПУ или 3D-принтер).
Наиболее распространенной ошибкой является выбор двигателя с высокой индуктивностью. Существует два основных «семейства» двигателей: двигатели с высокой индуктивностью в основном предназначены для поддержания положения и редкого перемещения (например, на монтировке телескопа), а двигатели с низкой индуктивностью предназначены для частого перемещения на высоких скоростях (например, на монтировке телескопа). фрезерный станок с ЧПУ или 3D-принтер).
Если вы используете шаговый двигатель с высокой индуктивностью со Smoothieboard (или любым драйвером шагового двигателя с ЧПУ), вы не только получите плохие характеристики скорости/крутящего момента, но и при перемещении шагового двигателя (или оси) вручную будет очень высокое напряжение. быть сгенерированы, что может разрушить ваш драйвер шагового двигателя.
Вы можете распознать шаговый двигатель с «высокой индуктивностью» по тому факту, что его номинальная индуктивность высока, обычно выше, чем 10 мГн. — это плохо. Если ваш двигатель не сообщает вам свою индуктивность, номинальное напряжение также является признаком: шаговые двигатели с высокой индуктивностью обычно имеют высокое номинальное напряжение, типичное значение равно 12В , где шаговые двигатели с ЧПУ имеют напряжение ниже 5В. Это не то, что вам нужно, вам нужен шаговый двигатель с низкой индуктивностью, с индуктивностью в идеале ниже 10 мГн и номинальным напряжением в идеале ниже 5 В.
Если ваш двигатель не сообщает вам свою индуктивность, номинальное напряжение также является признаком: шаговые двигатели с высокой индуктивностью обычно имеют высокое номинальное напряжение, типичное значение равно 12В , где шаговые двигатели с ЧПУ имеют напряжение ниже 5В. Это не то, что вам нужно, вам нужен шаговый двигатель с низкой индуктивностью, с индуктивностью в идеале ниже 10 мГн и номинальным напряжением в идеале ниже 5 В.
Сообщество reprap определяет хороший шаговый двигатель следующим образом:
Идеальный шаговый двигатель (для принтеров для повторной наплавки и подобных небольших ЧПУ с микрошаговыми драйверами при питании 12–24 В) размера NEMA17, номинальный ток от 1,5 до 1,8 А или меньше, сопротивление обмотки 1–4 Ом, от 3 до 8 мГн, 62 унции дюйма (0,44). Нм, 4,5кг.см) или более крутящего момента, 1,8 или 0,9градусов на шаг (200/400 шагов/об соответственно), например, kysan 1124090/42BYGh5803 или rattm 17HS8401 или Wantai
Проводка шагового двигателя
Будьте осторожны, правильно подсоедините катушки.

Проводка
Прямая проводка
Биполярные шаговые двигатели имеют два полюса (биполярные). Каждый полюс соединен с двумя проводами. Это 4 провода, выходящие из вашего шагового двигателя. Они должны быть подключены к вашему Smoothieboard.
Для этого каждый драйвер шагового двигателя на Smoothieboard имеет 4 соединения. (Драйверы шаговых двигателей имеют маркировку M1, M2 и т. д.)
Сложность часто заключается в том, чтобы выяснить, какие провода подключаются к каким полюсам. Если вы просто подключите что-то наугад, у вас есть шанс, что это сработает, но давайте подойдем к этому с научной точки зрения. Несколько методов:
Документация: Посмотрите на свой мотор, найдите его артикул. Тогда погуглите. Если вам повезет, вы найдете схему или техпаспорт, в котором будет указано, какой провод идет к какому полюсу. Обратите внимание на цвета, соответствующие каждой катушке.
Пальцы: Когда два провода для данного полюса соприкасаются друг с другом, создается замкнутая цепь для этого полюса.
 Это затрудняет вращение шагового двигателя. Вы можете использовать этот эффект для обнаружения полюсов. Поверните вал шагового двигателя, он должен вращаться свободно. Теперь возьмите два провода и соедините их. Снова поверните вал. Если он сопротивляется, поворачивается тяжелее, значит, вы нашли столб. Если это не так, оставьте один провод и попробуйте другой для второго. Делайте это, пока не найдете комбинацию, которая показывает сопротивление. Как только вы найдете два провода для данной катушки, два других провода будут просто другой катушкой. Обратите внимание на цвета, соответствующие каждой катушке.
Это затрудняет вращение шагового двигателя. Вы можете использовать этот эффект для обнаружения полюсов. Поверните вал шагового двигателя, он должен вращаться свободно. Теперь возьмите два провода и соедините их. Снова поверните вал. Если он сопротивляется, поворачивается тяжелее, значит, вы нашли столб. Если это не так, оставьте один провод и попробуйте другой для второго. Делайте это, пока не найдете комбинацию, которая показывает сопротивление. Как только вы найдете два провода для данной катушки, два других провода будут просто другой катушкой. Обратите внимание на цвета, соответствующие каждой катушке.Мультиметр: Настройте мультиметр на считывание сопротивления. Затем метод такой же, как и предыдущий, возьмите два провода наугад, проверьте их, за исключением того, что вы знаете, что найдете катушку, когда будете измерять электрическое сопротивление между двумя проводами. Если вы измеряете отсутствие контакта, попробуйте другую комбинацию проводов. Обратите внимание на цвета, соответствующие каждой катушке.
Теперь подключим провода к Smoothieboard. Назовем одну катушку А, а другую катушку В. Неважно, какая есть какая. Полярность также не имеет значения, меняется только направление вращения двигателя, и вы можете изменить это в файле конфигурации. Теперь просто подключите два провода к 4 контактам Smoothieboard для драйвера шагового двигателя как такового: AABB или BBAA. Другие комбинации, такие как ABBA или ABAB, не будут работать.
Как правильно подключить шаговые двигатели
Если вы не сделаете это правильно, он не будет работать должным образом
Как только ваш шаговый двигатель правильно подключен к Smoothieboard, он готов к управлению.
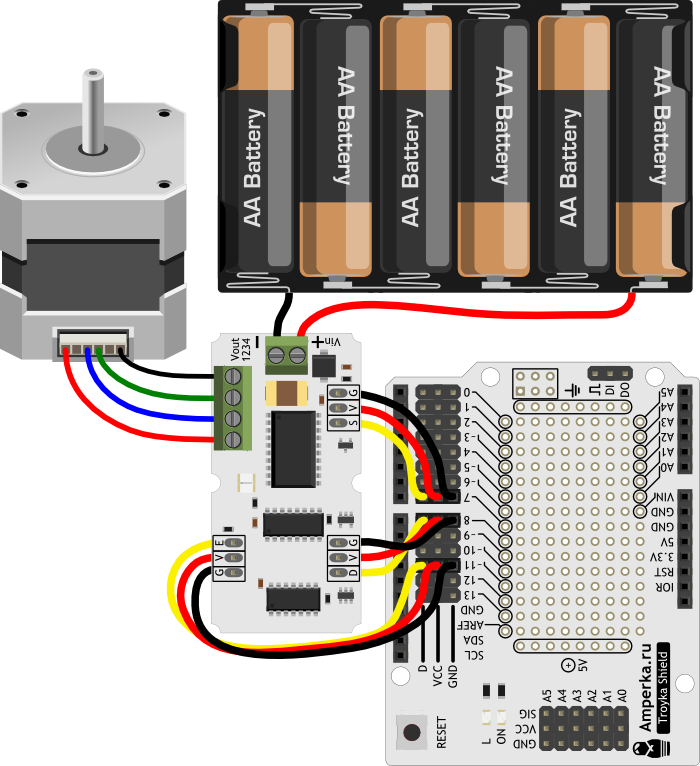
Подключение шагового двигателя к драйверу шагового двигателя.
В этом примере шаговый двигатель подключен к драйверу M1, а питание подается на VBB (основной вход питания).
Внешний драйвер шагового двигателя
Если вы хотите использовать более мощные шаговые двигатели, чем могут выдержать драйверы Smoothieboard (максимум 2 А), вам необходимо использовать внешние драйверы шаговых двигателей.
Подробную информацию о том, как подключить внешний драйвер шагового двигателя к Smoothieboard, можно найти в приложении к внешнему драйверу .
Шаговый двигатель
На них часто есть полезная информация
Настройка
Примеры конфигураций доступны на github https://github.com/Smoothieware/Smoothieware/tree/edge/ConfigSamples.
Вы также можете обратиться к документации по конфигурации.
Текущий
Первое, что вам нужно сделать, это сообщить драйверам шаговых двигателей, каков номинальный ток для ваших шаговых двигателей. Чтобы правильно управлять шаговым двигателем, драйвер должен знать номинальный ток двигателя.
Каждая модель шагового двигателя имеет точный номинальный ток. Вы можете управлять шаговым двигателем при более низком токе, что сделает его более тихим, но и менее мощным. Но нельзя гонять двигатель на большем токе, чем он рассчитан. Это может привести к перегреву и, возможно, к пропуску шагов.
Рейтинг часто указывается на этикетке вашего шагового двигателя (см. рисунок справа). Если это не так, вы можете получить его, набрав в Google номер модели шагового двигателя или связавшись с продавцом или производителем.
Получив правильный рейтинг, вы можете установить соответствующий параметр в файле конфигурации.
У Smoothie есть забавный способ называть драйверы шаговых двигателей. Вместо того, чтобы называть их X, Y или Z, поскольку это не имеет смысла для недекартовых роботов, таких как дельта-роботы, мы называем драйверы греческими буквами, чтобы они не зависели от приложения руки:
| Этикетка на доске Smoothieboard | M1 | M2 | M3 | M4 | M5 |
|---|---|---|---|---|---|
| Axis in a Cartesian machine | X (left-right) | Y (front-back) | Z (up-down) | E0 : First extruder | E1 : Второй экструдер |
| Греческая буква | α (альфа) | β (бета) | γ (гамма) | δ (дельта) | ε (эпсилон) |
| Вариант конфигурации настройки тока | alpha_current | beta_current | gamma_current | delta_current | epsilon_current |
Теперь, как описано в параграфе «Распаковка», подключите плату к компьютеру, откройте файл «config» в текстовом редакторе и измените значение конфигурации для каждого драйвера шагового двигателя на правильное значение.
Например, если ваш шаговый двигатель alpha имеет номинальный ток 1,68 А, отредактируйте соответствующую строку следующим образом:
alpha_current 1.68 # X ток шагового двигателя
Сделайте это для каждого шагового двигателя, который вы должны подключить к плате. (Если у вас декартовый робот, посмотрите, какой двигатель к какому шаговому приводу подключается в таблице выше. Если вы используете другой тип манипулятора, см. конкретную документацию.)
Шаговый двигатель
Шагов на миллиметр
Драйвер шагового двигателя работает ступенчато. Он перемещается на определенное количество шагов в одном направлении, затем на определенное количество шагов в другом. Вы думаете в миллиметрах. Вы хотите, чтобы ваша машина переместилась в определенное положение в миллиметрах, а затем в другое положение в миллиметрах.
Вам нужен Smoothieboard, чтобы преобразовать миллиметры, которые вы от него просите, в шаги, понятные драйверу шагового двигателя.
Это преобразование зависит от вашего точного решения руки. Наиболее распространенным и самым простым является решение с декартовым плечом, и именно на нем мы сосредоточимся здесь. Документацию по другим решениям для рук можно найти отдельно.
В случае решения с декартовым плечом вы просто конвертируете определенное количество миллиметров в определенное количество шагов. Это опция конфигурации steps_per_millimeter, которую вы должны установить для каждого шагового двигателя.
Чтобы его вычислить, необходимо умножить определенное количество коэффициентов.
Объект, который вы перемещаете, перемещается на определенное количество миллиметров за каждый оборот шагового двигателя. (Это зависит от характеристик ремня/шкива или системы ходового винта, которую вы используете.)
Шаговый двигатель совершает определенное количество полных шагов за один оборот. Обычно это 200. (Но может быть и 400.)
Каждый шаг делится драйвером шагового двигателя на определенное количество микрошагов.
 Нам нужно именно это число, а не количество полных шагов. Smoothieboard V1.1 всегда делит шаги на 32 микрошага. (16 для более старых смузибордов).
Нам нужно именно это число, а не количество полных шагов. Smoothieboard V1.1 всегда делит шаги на 32 микрошага. (16 для более старых смузибордов).
Формула выглядит следующим образом:
шагов на миллиметр = ((полных шагов на оборот) x (микрошагов на шаг)) / (миллиметров на оборот)
Чтобы помочь вам, есть удивительный калькулятор замечательного Йозефа Прусы: http://calculator.josefprusa.cz/
Как только вы узнаете правильное значение для данного драйвера шагового двигателя, установите его в файле конфигурации:
alpha_steps_per_mm 80 # Шагов на мм для альфа-степпера
Сделайте это для каждого драйвера шагового двигателя.
В случае вашего шагового двигателя экструдера принцип тот же, но значение равно 9.0416 экструдер_шагов_на_мм .
Вот два хороших видео о шагах на миллиметры:
Pronterface
Направление
Пришло время проверить ваши шаговые двигатели. Для этого вам нужно будет использовать программное обеспечение хоста, такое как Pronterface или веб-интерфейс.
Для этого вам нужно будет использовать программное обеспечение хоста, такое как Pronterface или веб-интерфейс.
Теперь подключитесь к Smoothieboard через последовательный интерфейс. Включите машину, вставив блок питания в розетку.
Теперь вам нужно переместить ось, чтобы убедиться, что шаговый двигатель вращается в правильном направлении. В Pronterface щелкните рядом с желтой стрелкой, отмеченной цифрой 9.0030 «+Х» .
Ваша ось X будет двигаться. Если он сдвинулся вправо, отлично! Все в порядке, и вам нечего менять. Если он сместился влево, вам нужно инвертировать направление этой оси.
Вы делаете это, редактируя файл конфигурации и инвертируя вывод направления для этого драйвера шагового двигателя:
alpha_dir_pin 0.5 # Пин для направления шагового альфа-канала
Становится:
alpha_dir_pin 0,5! # Пин для направления альфа шагового двигателя
Это для ваших осей. В случае вашего экструдера значение конфигурации равно extruder_dir_pin .