
Схемы управления шаговыми двигателями
Современные шаговые двигатели, гибридые либо ШД на постоянных магнитах, как правило, производятся с двумя обмотками (4 вывода), с двумя обмоткми и центральными отводами (6 либо 5 выводов) и с четырьмя обмотками (8-ми выводные ШД). Биполярные двигатели имеют две обмотки и, соответственно, четыре вывода. Униполярные двигатели также имеют две по обмотки, но у каждой из них есть центральный отвод, что позволяет использовать для управления двигателем простой униполярный драйвер (т. е. переключать направление магнитного поля, создаваемого обмотками двигателя переполюсовкой половин обмоток двигателя). Иногда средние отводы могут быть объединены внутри двигателя, такой двигатель может иметь 6 или 5 выводов. В силу простоты униполярной схемы управления эти двигатели находят широкое применение в самых различнх областях промышленности.
Однако большинство драйверов предназначено для управления биполярными двигателями.
Постараемся разабраться, каким образом можно подключить 6-ти или 8-ми выводной мотор к биполярной схеме управления и как при этом изменяются электрические характеристики двигателя?
6-ти выводные шаговые двигатели
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов – униполярное либо биполярное подключение обмоток двигателя.
Униполярное подключение
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения – использовать центральный отвод.
Электрические характеристики двигателя – ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. – в этом случае равны данным, приведенным в каталоге.
– в этом случае равны данным, приведенным в каталоге.
Биполярное подключение
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения – биполярное.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток – 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R – именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении – Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iбиполяр.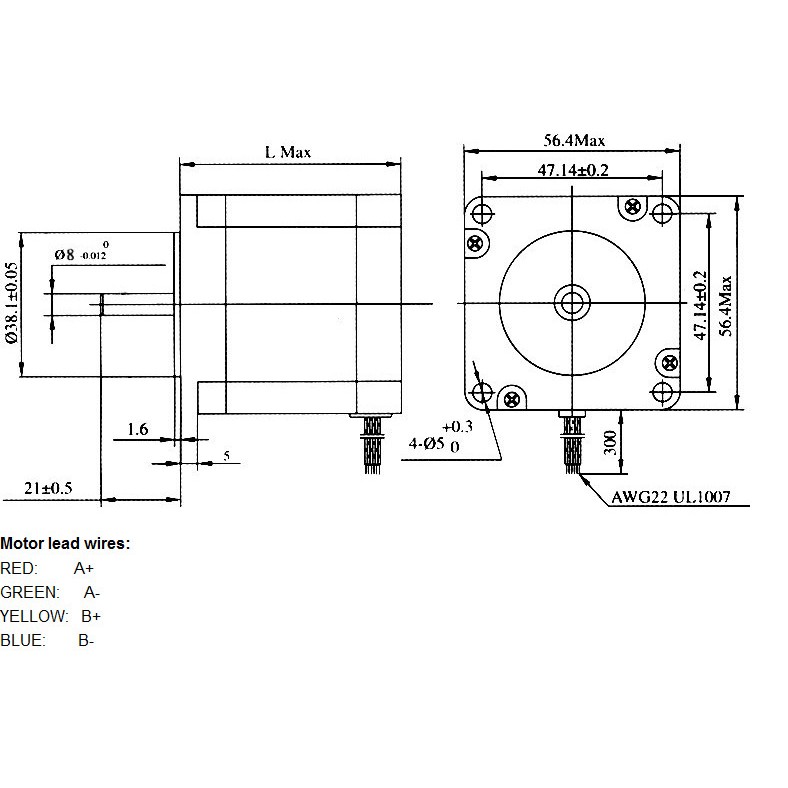 2 * 2 * R
2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iбиполяр.2 * 2* R, откуда
Iбиполяр.= Iуниполяр. / √2, т.е.
Iбиполяр.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Параметр | Значение |
|---|---|
| Ток обмотки, А |
Iбиполяр.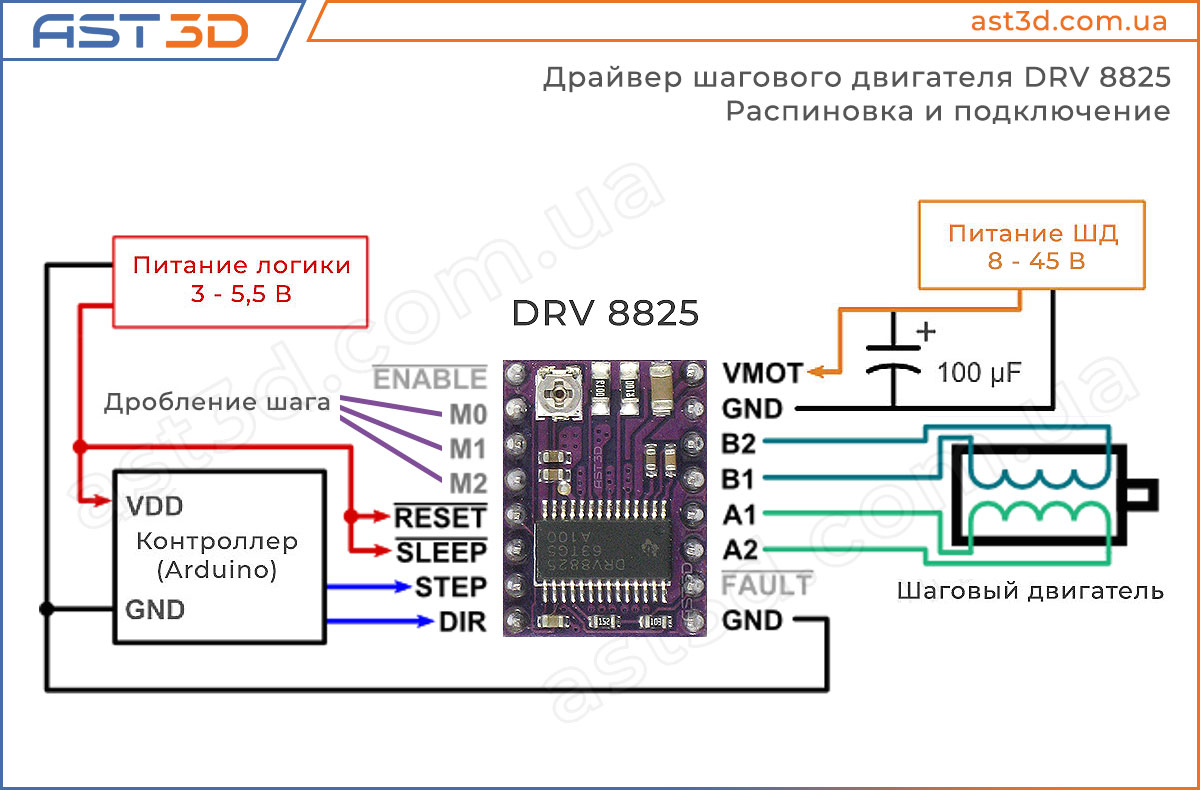 = 0.707 * Iуниполяр. = 0.707 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр. = 2 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр. = Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов – униполярное, последовательное либо параллельное подключение обмоток двигателя.
Униполярное подключение шагового двигателя (схема электрическая)
Если требуется вращать двигатель на средних скоростях (из диапазона рабочих скоростей), лучший тип подключения – использовать лишь две из четырех обмоток.
Электрические характеристики двигателя – ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. – в этом случае равны данным, приведенным в каталоге.
Биполярное последовательное подключение шагового двигателя (схема электрическая)
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток – 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R – именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении – Iуниполяр. 2 * R
2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому I
Iпослед.= Iуниполяр. / √2, т.е.
Iпослед.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпослед. = 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Параметр | Значение |
|---|---|
| Ток обмотки, А |
Iбиполяр. = 0.707 * Iуниполяр. = 0.707 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр. = 2 * Rуниполяр. |
| Индуктивность обмотки, мГн | Lбиполяр. = Lуниполяр. |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
Биполярное параллельное подключение шагового двигателя (схема электрическая)
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток – 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R – именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
Потребляемая мощность при униполярном включении – Iуниполяр.2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр.2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = 0.5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
Iбиполяр.= 1.4 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
= 1.4 * Tуниполяр.
Итак, характеристики ШД будут такими:
| Параметр | Значение |
|---|---|
| Ток обмотки, А | Iбиполяр.= 1.4 * Iуниполяр. |
| Сопротивление обмотки, Ом | Rбиполяр.. = 0.5 * Rуниполяр. |
| Индуктивность обмотки, мГн |
Lбиполяр.. = 4 * L |
| Крутящий момент, кг×см | Tбиполяр. = 1.4 * Tуниполяр. |
Пример: параметры ШД FL60STH86-2008AF для различных подключений
| Параметр | униполярное | параллельное | последовательное |
|---|---|---|---|
| Ток/ фаза, А | 2 |
2. 8 8 |
1.4 |
| Сопротивление обмотки, Ом | 1.5 | 0.75 | 3 |
| Индуктивность обмотки, мГн | 3 | 1.5 | 6 |
| Крутящий момент, кг×см | 22 кг х см | 31 кг х см | 31 кг х см |
| Преимущества / недостатки | Средний момент при среднем энергопотреблении | Высокий момент при высоком потреблении тока | Высокий момент на низких скоростях при низком энергопотреблении |
| Максимальная эффективность | средний скоростной диапазон | высокоскоростной диапазон | низкоскоростной диапазон |
Общий характер изменения динамических характеристик ШД в зависимости от типа подклюяения
Подключение шагового двигателя: схема подключения
Шаговый двигатель, биполярный или униполярный, представляет собой электрическое устройство постоянного тока, разделяющее оборот на определённое количество шагов. Количество и величина шагов задаётся специальным устройством, именуемым контроллер шагового двигателя. Схема шаговый двигатель + контроллер шагового двигателя широко применяется в самых различных механизмах, от бытовой техники до ЧПУ. ШД обеспечивает стабильную и бесперебойную работу оборудования, частью которого он является, однако прежде чем начать работу, его необходимо правильно подключить.
Количество и величина шагов задаётся специальным устройством, именуемым контроллер шагового двигателя. Схема шаговый двигатель + контроллер шагового двигателя широко применяется в самых различных механизмах, от бытовой техники до ЧПУ. ШД обеспечивает стабильную и бесперебойную работу оборудования, частью которого он является, однако прежде чем начать работу, его необходимо правильно подключить.
Подключение шагового двигателя
В общем и целом процесс подключения шагового двигателя не является затруднительным. В первую очередь нужно определить, какой тип ШД используется. Для этого следует обратить внимание на то, сколькими проводами снабжён электропривод. В зависимости от типа, шаговый двигатель может иметь 4, 5, 6 или 8 проводов.
Шаговый двигатель с 4 проводами может использоваться совместно только с биполярными устройствами. Каждая из двух фазных обмоток такого электродвигателя имеет пару проводов с непрерывной связью. Драйвер ШД в данном случае подключается пошагово.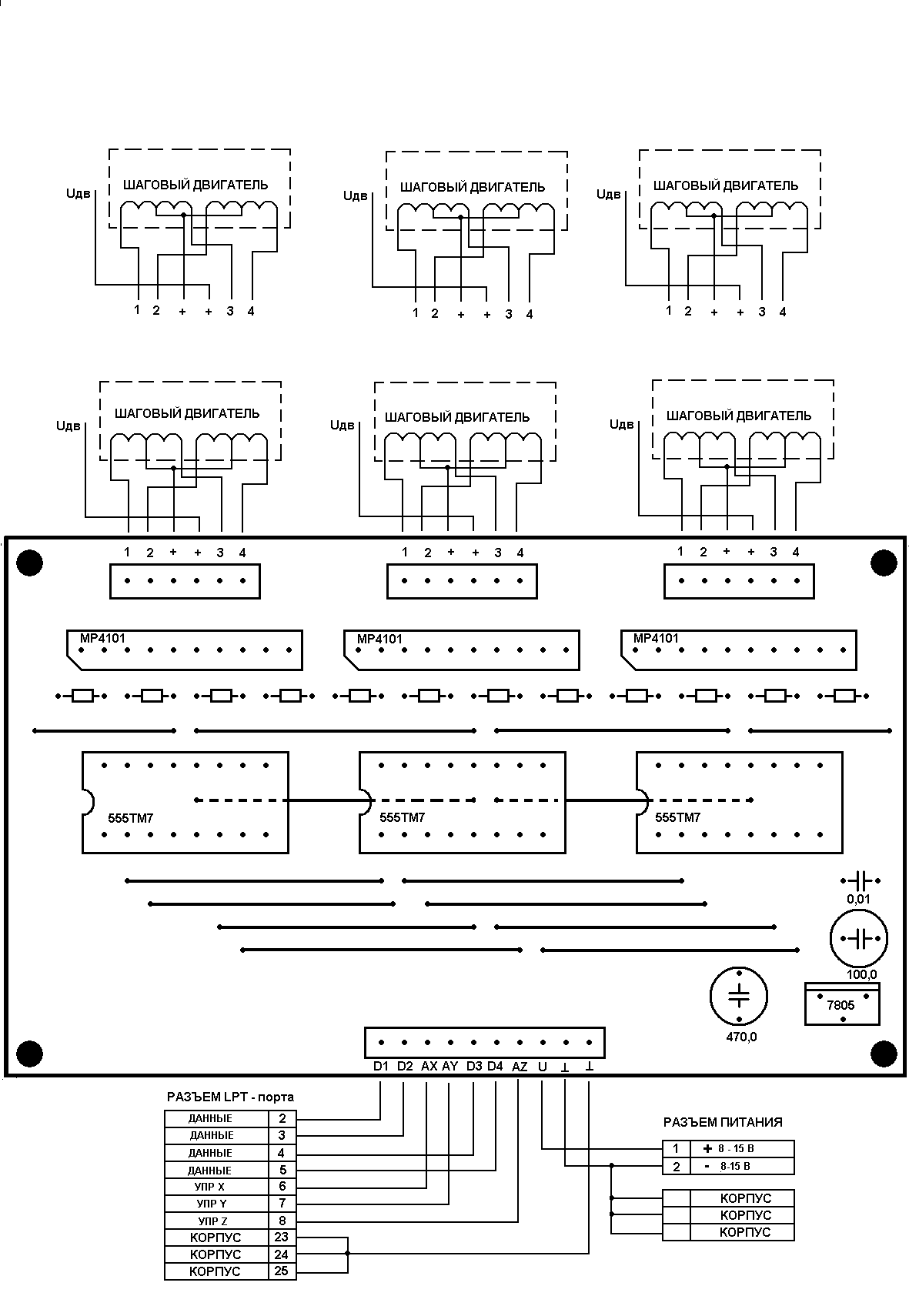
Шаговый двигатель, оснащённый 6-ю или 8-ю проводами, помимо пары проводов для каждой из обмоток имеет также центр-кран для каждой из них. Такой электродвигатель считается униполярным и может быть подключён как к биполярным, так и к униполярным устройствам. Для разделения провода при подключении униполярного ШД рекомендуется использовать измерительный прибор. Если униполярный шаговый двигатель подключается к однополярному элементу, допускается использование всех проводов. Если же подключение необходимо произвести к биполярному оборудованию, используются один конец провода и один центральный кран для каждой из обмоток.
Шаговый двигатель с 5-ю проводами схож с шестипроводным, однако центральные клеммы такого электродвигателя соединяются внутри сплошным кабелем, после чего выводятся к одному проводу. Разделение проводов в таком механизме – довольно трудоёмкий процесс, который очень сложно произвести без разрывов. Наиболее безопасным и эффективным выходом из ситуации при подключении такого прибора является определение центра провода с последующим соединением его с другими проводниками.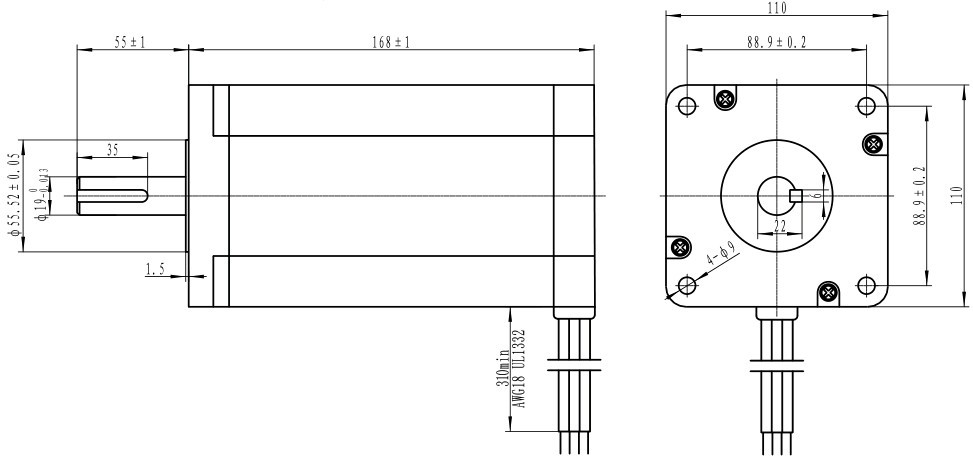
Стандартной схемой, использующейся для подключения 4-выводного биполярного ШД к драйверу или контроллеру является подключение первой обмотки к разъёмам А и А*, а второй – непосредственно к контроллеру через разъёмы B и B*. Разъёмы контроллера Dir и Step при таком методе подключения не используются; программное управление осуществляется при помощи генератора импульсов.
ВНИМАНИЕ – всегда проверяйте цветовую схему выводов, шаговый двигатель от конкретного производителя отличается от абсолютно аналогичного ШД другого производителя, а значит, может иметь другую цветовую схему выводов!
По вопросу подключения шагового двигателя, вы всегда можете обратиться к нашим специалистам по телефону по России (звонок бесплатный) 8 800 5555 068 либо по электронной почте.
Как работают шаговые двигатели | РОБОТОША
Использование шаговых двигателей является одним из самых простых, дешевых и легких решений для реализации систем точного позиционирования. Эти двигатели очень часто используются в различных станках ЧПУ и роботах. Сегодня я расскажу о том, как устроены шаговые двигатели и как они работают.
Эти двигатели очень часто используются в различных станках ЧПУ и роботах. Сегодня я расскажу о том, как устроены шаговые двигатели и как они работают.
Что такое шаговый двигатель?
Прежде всего, шаговый двигатель — это двигатель. Это означает, что он преобразует электрическую энергию в механическую. Основное отличие между ним и всеми остальными типами двигателей состоит в способе, благодаря которому происходит вращение. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами (отсюда и их название). Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1. 8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Основы работы шагового двигателя
Как и все моторы, шаговые двигатели состоят из статора и ротора. На роторе установлены постоянные магниты, а в состав статора входят катушки (обмотки). Шаговый двигатель, в общем случае, выглядит следующим образом:
Здесь мы видим 4 обмотки, расположенные под углом 90° по-отношению друг к другу, размещенные на статоре. Различия в способах подключения обмоток в конечном счете определяют тип подключения шагового двигателя. На рисунке выше, обмотки не соединяются вместе. Мотор по такой схеме имеет шаг поворота равный 90°. Обмотки задействуются по кругу — одна за другой. Направление вращения вала определяется порядком, в котором задействуются обмотки. Ниже показана работа такого мотора. Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.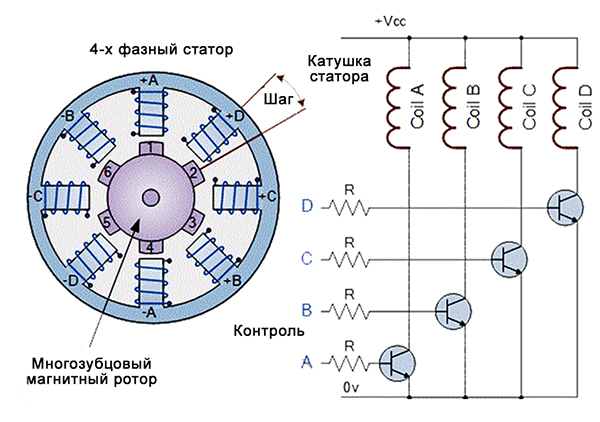
Режимы управления
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Волновое управление или полношаговое управление одной обмоткой
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Полношаговый режим управления
Вторым, и наиболее часто используемым методом, является полношаговый метод. Для реализации этого способа, напряжение на обмотки подается попарно. В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
В этом случае мотор будет выдавать 100% номинального вращающего момента.
Такой мотор имеет 4 шага на полный оборот, что и является номинальным числом шагов для него.
Полушаговый режим
Это очень интересный способ получить удвоенную точность системы позиционирования, не меняя при этом ничего в «железе»! Для реализации этого метода, все пары обмоток могут запитываться одновременно, в результате чего, ротор повернется на половину своего нормального шага. Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Однообмоточный режим
Двухобмоточный режим
Используя этот метод, тот же самый мотор сможет дать удвоенное число шагов на оборот, что означает двойную точность для системы позиционирования. Например, этот мотор даст 8 шагов на оборот!
Режим микрошага
Микрошаговый режим наиболее часто применяемый способ управления шаговыми двигателями на сегодняшний день. Идея микрошага состоит в подаче на обмотки мотора питания не импульсами, а сигнала, по своей форме, напоминающего синусоиду. Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Форма тока, протекающего через обмотку похожа на синусоиду. Также могут использоваться формы цифровых сигналов. Вот некоторые примеры:
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Хотя кажется, что в режиме микрошага шаги становятся больше, но, на самом деле, этого не происходит. Для повышения точности часто используются трапецевидные шестерни. Этот метод используется для обеспечения плавного движения.
Этот метод используется для обеспечения плавного движения.
Типы шаговых двигателей
Шаговый двигатель с постоянным магнитом
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.
Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
Шаговый двигатель с переменным магнитным сопротивлением
У двигателей этого типа на роторе нет постоянного магнита. Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.
Гибридный шаговый двигатель
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0. 9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение. Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.
Два 50-зубых диска помещены сверху и снизу постоянного магнита
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.
Впадины на одном диске выровнены с возвышениями на другом
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй. Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения.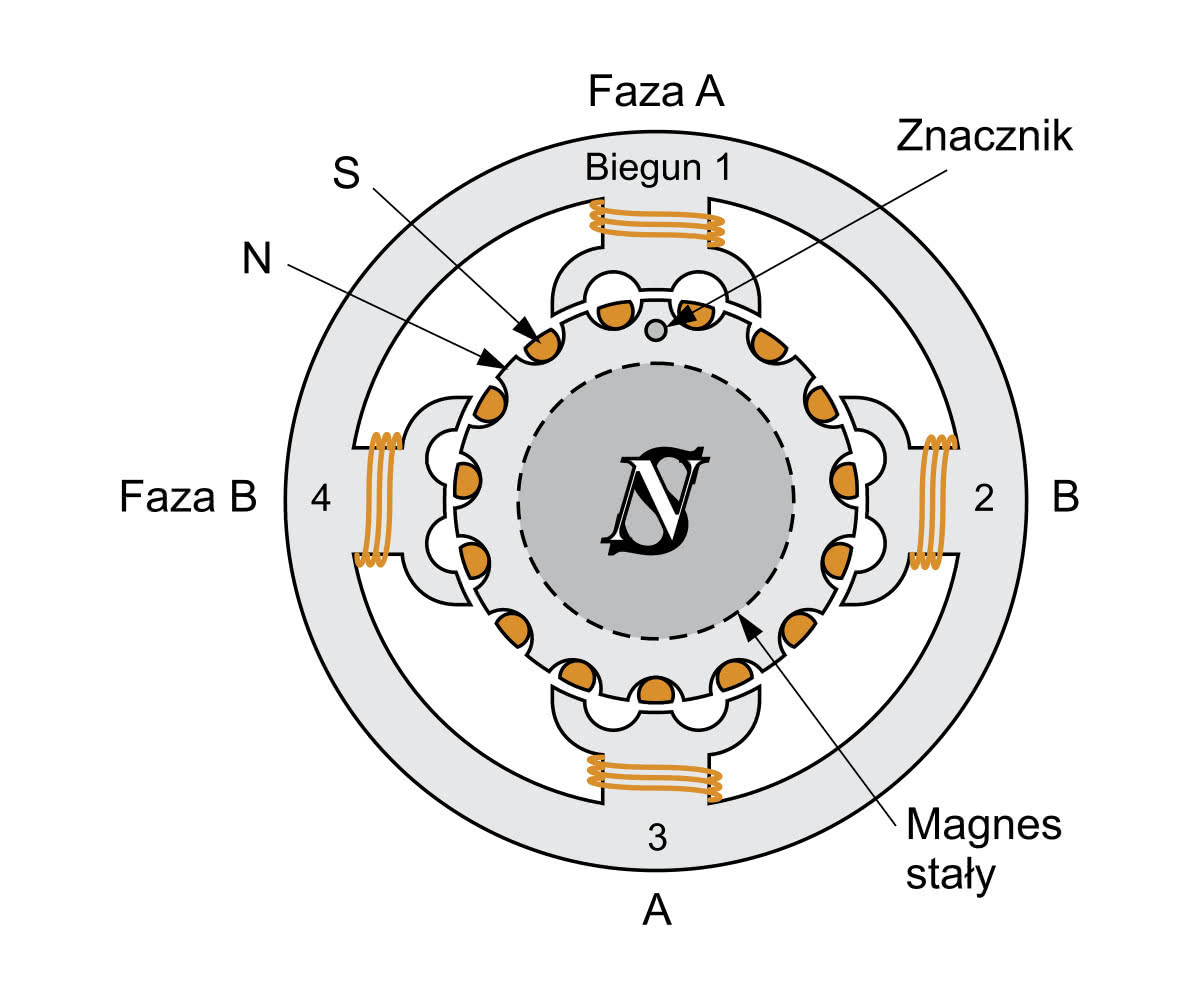 Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Подключение обмоток
Шаговые двигатели относятся к многофазным моторам. Больше обмоток, значит, больше фаз. Больше фаз, более гладкая работа мотора и более выокая стоимость. Крутящий момент не связан с числом фаз. Наибольшее распространение получили двухфазные двигатели. Это минимальное количество необходимых для того, чтобы шаговый мотор функционировал. Здесь необходимо понять, что число фаз не обязательно определяет число обмоток. Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Существует три различных типа подключения для двухфазных шаговых двигателей. Обмотки соединяются между собой, и, в зависимости от подключения, используется различное число проводов для подключения мотора к контроллеру.
Биполярный двигатель
Это наиболее простая конфигурация. Используются 4 провода для подключения мотора к контроллеру. Обмотки соединяются внутри последовательно или параллельно. Пример биполярного двигателя:
Мотор имеет 4 клеммы. Два желтых терминала (цвета не соответствуют стандартным!) питают вертикальную обмотку, два розовых — горизонтальную обмотку. Проблема такой конфигурации состоит в том, что если кто-то захочет изменить магнитную полярность, то единственным способом будет изменение направления электрического тока. Это означает, что схема драйвера усложнится, например это будет H-мост.
Униполярный двигатель
В униполярном двигателе общий провод подключен к точке, где две обмотки соединены вместе:
Используя этот общий провод, можно легко изменить магнитные полюса. Предположим, например, что мы подключили общий провод к земле. Запитав сначала один вывод обмотки, а затем другой — мы изменяем магнитные полюса. Это означает, что схема для использования биполярного двигателя очень простая, как правило, состоит только из двух транзисторов на фазу. Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Униполярные двигатели могут иметь 5 или 6 выводов для подключения. На рисунке выше продемонстрирован униполярный мотор с 6 выводами. Существуют двигатели, в которых два общих провода соединены внутри. В этом случае, мотор имеет 5 клемм для подключения.
8-выводной шаговый двигатель
Это наиболее гибкий шаговый мотор в плане подключения. Все обмотки имеют выводы с двух сторон:
Этот двигатель может быть подключен любым из возможных способов. Он может быть подключен как:
Он может быть подключен как:
- 5 или 6-выводной униполярный,
- биполярный с последовательно соединенными обмотками,
- биполярный с параллельно соединенными обмотками,
- биполярный с одним подключением на фазу для приложений с малым потреблением тока
Еще по этой теме
Вы можете пропустить чтение записи и оставить комментарий. Размещение ссылок запрещено.
Шаговые двигатели
Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. Как и любые бесколлекторные двигатели, они имеют высокую надежность и большой срок службы, что позволяет использовать их в критичных, например, индустриальных применениях.
По сравнению с обычными двигателями постоянного тока, шаговые двигатели требуют значительно более сложных схем управления, которые должны выполнять все коммутации обмоток при работе двигателя. Выбор контроллера для управления шаговым двигателем описан в статье Контроллеры ШД. Кроме того, сам шаговый двигатель – дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество. Справедливости ради следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей.
Кроме того, сам шаговый двигатель – дорогостоящее устройство, поэтому там, где точное позиционирование не требуется, обычные коллекторные двигатели имеют заметное преимущество. Справедливости ради следует отметить, что в последнее время для управления коллекторными двигателями все чаще применяют контроллеры, которые по сложности практически не уступают контроллерам шаговых двигателей.
Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи. Это очень важно, так как такие датчики могут стоить намного больше самого двигателя. Однако это подходит только для систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. В то же время системы с обратной связью способны работать с большими ускорениями и даже при переменном характере нагрузки. Если нагрузка шагового двигателя превысит его момент, то информация о положении ротора теряется и система требует базирования с помощью, например, концевого выключателя или другого датчика. Системы с обратной связью не имеют подобного недостатка.
Системы с обратной связью не имеют подобного недостатка.
При проектировании конкретных систем приходится делать выбор между сервомотором и шаговым двигателем. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый двигатель является наиболее экономичным решением. Как и для обычных двигателей, для повышения момента может быть использован понижающий редуктор. Однако для шаговых двигателей редуктор не всегда подходит.
В отличие от коллекторных двигателей, у которых момент растет с увеличением скорости, шаговый двигатель имеет больший момент на низких скоростях. К тому же, шаговые двигатели имеют гораздо меньшую максимальную скорость по сравнению с коллекторными двигателями, что ограничивает максимальное передаточное число и, соответственно, увеличение момента с помощью редуктора. Готовые шаговые двигатели с редукторами хотя и существуют, однако являются экзотикой. Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт. Возможность получения низкой частоты вращения часто является причиной того, что разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В то же время коллекторный двигатель имеет более высокую удельную мощность, низкую стоимость, простую схему управления, и вместе с одноступенчатым червячным редуктором он способен обеспечить тот же диапазон скоростей, что и шаговый двигатель. К тому же, при этом обеспечивается значительно больший момент. Приводы на основе коллекторных двигателей очень часто применяются в технике военного назначения, а это косвенно говорит о хороших параметрах и высокой надежности таких приводов. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно. Тем не менее, для шаговых двигателей имеется своя, хотя и довольно узкая, сфера применения, где они незаменимы.
Еще одним фактом, ограничивающим применение редуктора, является присущий ему люфт. Возможность получения низкой частоты вращения часто является причиной того, что разработчики, будучи не в состоянии спроектировать редуктор, применяют шаговые двигатели неоправданно часто. В то же время коллекторный двигатель имеет более высокую удельную мощность, низкую стоимость, простую схему управления, и вместе с одноступенчатым червячным редуктором он способен обеспечить тот же диапазон скоростей, что и шаговый двигатель. К тому же, при этом обеспечивается значительно больший момент. Приводы на основе коллекторных двигателей очень часто применяются в технике военного назначения, а это косвенно говорит о хороших параметрах и высокой надежности таких приводов. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно. Тем не менее, для шаговых двигателей имеется своя, хотя и довольно узкая, сфера применения, где они незаменимы.
Виды шаговых двигателей:
· двигатели с переменным магнитным сопротивлением
· двигатели с постоянными магнитами
· гибридные двигатели
Определить тип двигателя можно даже на ощупь: при вращении вала обесточенного двигателя с постоянными магнитами (или гибридного) чувствуется переменное сопротивление вращению, двигатель вращается как бы щелчками. В то же время вал обесточенного двигателя с переменным магнитным сопротивлением вращается свободно. Гибридные двигатели являются дальнейшим усовершенствованием двигателей с постоянными магнитами и по способу управления ничем от них не отличаются.
Определить тип двигателя можно также по конфигурации обмоток. Двигатели с переменным магнитным сопротивлением обычно имеют три (реже четыре) обмотки с одним общим выводом. Двигатели с постоянными магнитами чаще всего имеют две независимые обмотки. Эти обмотки могут иметь отводы от середины. Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки. В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга.
Иногда двигатели с постоянными магнитами имеют 4 раздельных обмотки. В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга.
Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Биполярные и униполярные шаговые двигатели
В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода.Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля.
Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8. При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмоткими и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности. Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
6-ти выводные шаговые двигатели
Для подключения 6-ти выводного шагового двигателя к классическому биполярному драйверу может быть выбран один из двух способов – униполярное либо биполярное подключение обмоток двигателя.
Униполярное подключение
Если требуется вращать двигатель на средних и высоких скоростях (из диапазона рабочих скоростей), лучший тип подключения – использовать центральный отвод. Электрические характеристики двигателя – ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. – в этом случае равны данным, приведенным в каталоге.
Биполярное подключение
Если требуется вращать двигатель на низких скоростях (из диапазона рабочих скоростей), лучший тип подключения – биполярное. Электрические характеристики двигателя – ток обмотки, сопротивление обмотки, статический крутящий момент, индуктивность обмоток и др. – в этом случае равны данным, приведенным в каталоге. При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток – 1.4 А, то есть в 1. 4 раза меньше. Это можно легко понять из следующих рассуждений. Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R – именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
4 раза меньше. Это можно легко понять из следующих рассуждений. Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R – именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении – Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iбиполяр.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iбиполяр.2 * 2* R, откуда
Iбиполяр.= Iуниполяр. / √2, т.е.
Iбиполяр.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
8-ми выводные шаговые двигатели
Для подключения 8-ми выводного шагового двигателя (то есть двигателя с четырьмя обмотками) к классическому биполярному драйверу может быть выбран один из трех способов – униполярное, последовательное либо параллельное подключение обмоток двигателя.
Если требуется вращать двигатель на средних скоростях (из диапазона рабочих скоростей), лучший тип подключения – использовать лишь две из четырех обмоток.
Наиболее эффективно для низкоскоростного диапазона рабочих скоростей двигателя.
При таком типе подключения нужно уменьшить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при последовательном включении обмоток требуемый ток – 1.4 А, то есть в 1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R – именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность при униполярном включении – Iуниполяр.2 * R
При последовательном включении обмоток потребляемая мощность становится Iпослед.2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = Iпослед.2 * 2* R, откуда
Iпослед.= Iуниполяр. / √2, т.е.
Iпослед.= 0.707 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпослед. = 1.4 * Tуниполяр.
Наиболее эффективно использование параллельного включения обмоток для высоких скоростей.
При таком типе подключения нужно увеличить ток, подаваемый на обмотки двигателя в √2 раз. Например, если номинальный рабочий ток двигателя составляет 2 А, то при параллельном включении обмоток требуемый ток – 2.8 А, то есть в 1.4 раза больше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R – именно оно приведено в каталоге). При параллельном включении обмоток сопротивление объединенной обмотки уменьшаетсяв два раза (0.5 R).
Потребляемая мощность при униполярном включении – Iуниполяр.2 * R
При параллельнном включении обмоток потребляемая мощность становится 0.5 * Iбиполяр.2 * R
Потребляемая мощность не зависит от типа подключения, поэтому Iуниполяр.2 * R = 0.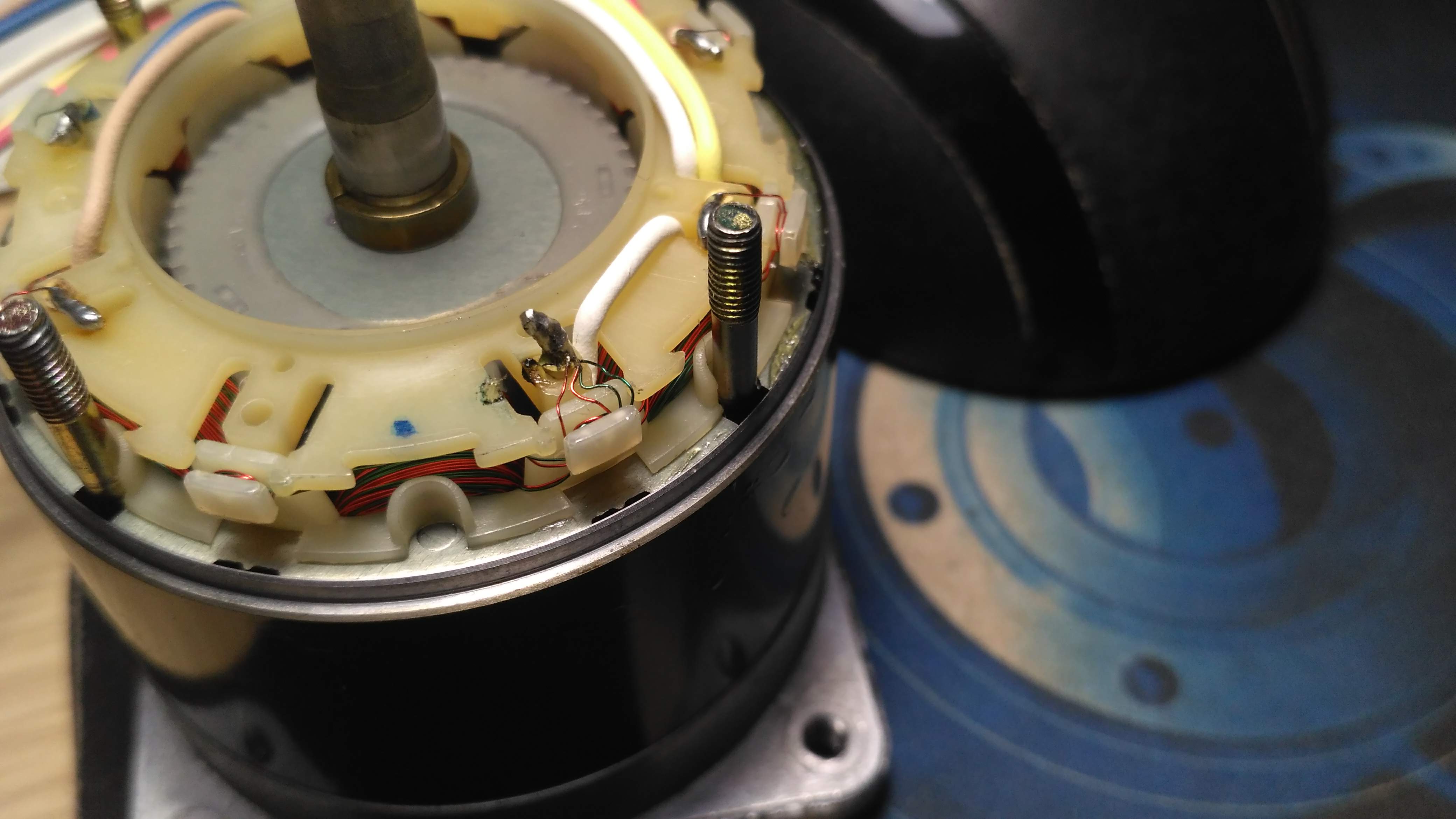 5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
5 * Iбиполяр. 2 * R, откуда Iбиполяр..= Iуниполяр. /√2, т.е.
Iбиполяр.= 1.4 * Iуниполяр.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением величины тока, пропускаемого через обмотки. Но так как ток увеличился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tбиполяр. = 1.4 * Tуниполяр.
При выборе шагового двигателя одной из важнейших характеристик является его скоростные качества, то есть зависимость момента на валу от скорости вращения. Сравнить и оценить эту характеристику можно зная значения сопротивления и индуктивности обмоток выбираемого двигателя. Чем больше соотношение R/L тем быстрее нарастает ток в обмотках и тем большую скорость вращения можно достичь без существенного падения момента. Объясняется это тем, что эквивалентная схема представляет собой последовательно соединенные индуктивность и омическое сопротивление, возникающая в цепи ЭДС самоиндукции препятствует изменению тока в цепи, замедляя его возрастание, а также спад тока при размыкании цепи. Ток не может вырасти мгновенно до номинального значения, а следовательно, крутящий момент двигателя тоже нарастает не мгновенно, а по экспоненте. При увеличении скорости вращения не только увеличивается скорость коммутации обмоток, но также уменьшается время, на которое подается напряжение на обмотку. При критической скорости ток в обмотке двигателя еще не успевает вырасти до номинального значения, а напряжение с обмотки уже снимается. Происходит снижение крутящего момента, двигатель начинает пропускать шаги.
Интернет магазин чпу станков хобби класса и комплектации
Какой выбрать шаговый двигатель для ЧПУ? Как подобрать шаговый двигатель для станка ЧПУ. ШД из принтера
Шаговые электродвигатели можно встретить в устройстве автомобильных приборных панелей, принтеров, приводов CD-дисков, электрических инструментов, в общем – везде, где необходима повышенная точность позиционирования. Но наибольшую известность ШД получил в станках с ЧПУ.
Но наибольшую известность ШД получил в станках с ЧПУ.
Но почему этот механизм именуется именно так – «шаговый двигатель»? Если описывать его в двух словах, то он представляет собой бесщеточный синхронный мотор с несколькими проволочными обмотками. Электрический ток подается в одну из обмоток статора (неподвижного элемента) и таким образом фиксирует ротор (подвижную часть) в определенной позиции. Затем ток поступает в другую обмотку и ротор совершает новое движение. Такая последовательная смена позиции именуется «шаг». И именно благодаря этому принципу работы Шаговый Электродвигатель получил свое название.
Устройство и виды ШД
На сегодняшний день различают три основных типа шаговых двигателей:
Следует отметить, что микрошаг возможен только в гибридных ШД. Каждый микрошаг осуществляется посредством независимого управления обмотками. При помощи управления соотношением токов ротор может фиксироваться даже на промежуточном участке между двумя соседствующими шагами.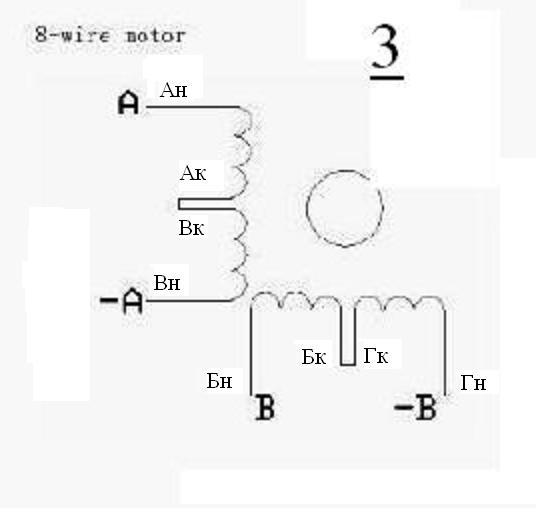 Это повышает плавность вращения подвижного элемента и позволяет добиться оптимальной точности позиционирования. Количество шагов в этом режиме может достигать даже 51 200 за один оборот.
Это повышает плавность вращения подвижного элемента и позволяет добиться оптимальной точности позиционирования. Количество шагов в этом режиме может достигать даже 51 200 за один оборот.
Многие любители задаются вопросом: почему выбрана именно зубчатая форма ротора? Ответ прост: в целях получения периодической зависимости обмотки статора от углового положения ротора. Зазор между пазами делается намного большим, чем между зубцами. Это позволяет обеспечить более низкую магнитную проводимость зазоров относительно удельной проводимости зубцов. В противном случае, шаговый двигатель просто не смог бы функционировать. Очевидно, что именно совокупность всех его конструктивных особенностей, а также форм и состава элементов позволяют ШД быть полноценным механизмом, а не просто куском металла.
Кроме того, в зависимости от типа обмоток, ШД подразделяют на:
- биполярные . Они обладают по одной обмотке для каждой фазы. Изменение направления магнитного поля в них обеспечивается посредством переплюсовки драйвером – двухполярным полумостовым или мостовым;
- униполярные .
Такой шаговый двигатель также обладает по одной обмотке в каждой из фаз, но при этом от середины любой отдельной обмотки делается отвод. Таким образом направление поля можно менять посредством переключения используемой половинки обмотки. Драйвер должен содержать лишь четыре ключа, так что он проще, чем в биполярном моторе.
Характеристики ШД
В технической документации к шаговым двигателям вы можете встретить такой перечень характеристик:
- Крутящий момент или момент вращения . Измеряется в килограмм-сила-сантиметрах. Часто к этому пункту прилагается график, в котором выражается зависимость вращательного момента от частоты вращения. Чем выше этот показатель, тем быстрее мотор набирает обороты при включении.
- Удерживающий момент . Он показывает, с какой силой статор может блокировать ротор, когда двигатель включен, но не запущен. То есть это параметр крутящего момента при нулевой скорости. По графику он снижается прямо пропорционально повышению скорости вращения. Измеряется данный показатель в унциях-на-дюйм. Удерживающий момент в мере, указанной производителем, мотор может продемонстрировать лишь в статическом режиме, при условии, что полный ток подается сразу в две фазы.
- Тормозящий момент . Это величина силы, удерживающей ротор от вращения в условиях отсутствия подачи тока. То есть, сила фиксации ротора при выключении. Также его именуют стопорный момент. В гибридных ШД он составляет не более десятой части от величины силы, удерживающей ротор от проворачивания при полной подаче тока. Данная характеристика измеряется в тех же единицах, что и удерживающий момент.
- Номинальное напряжение . Этот показатель напрямую зависит от индуктивности обмоток и позволяет определить оптимальное напряжение, которое следует подавать в двигатель. Лучшее напряжение, подходящее для вашего ШД находится в диапазоне от 4 до 25 значений от номинального. Если вы превысите силу подаваемого тока, то мотор будет перегреваться, что приведет к его поломке. А если напряжения будет недостаточно, то он просто не запустится. Эта характеристика указывается в Вольтах. Для вычисления оптимальной силы тока используется специальная формула U = 32 x√ L, где L– это индуктивность обмотки, а U – искомое значение.
- Отдельно указывается результат проведения диэлектрических испытаний, в ходе которых было определено максимальное напряжение, которое способна выдержать обмотка в течение определенного отрезка времени. Этим показателем определяется прочность двигателя, то, насколько успешно он может сопротивляться перегрузкам.
- Момент инерции подвижной части мотора . Определяет скорость разгона ШД. Данная величина измеряется в грамм-квадратных сантиметрах.
- Количество шагов за один оборот (учитываются только полные шаги, половинчатые значения не берутся во внимание). Чем больше шагов, тем мощнее и быстрее двигатель.
- Длина и масса . Имеется в виду именно длина корпуса, без учета вала. А вот в параметре «вес» указывается общая масса изделия. От габаритов и массы зависит, в каких условиях может использоваться двигатель. В одних случаях нужен компактный мотор, а в других подойдет только более крупный и мощный.
Рассмотрим на примере шаговый двигатель nema. Двигатель PL57h51, что обозначает ширину-высоту (диаметр) по квадратному фланцу 57мм — PL57. Длина двигателя, без вала 41мм — h51. Крутящий, удерживающий и другие моменты двигателя больше зависят от диаметра, чем от длины двигателя.
Характеристики PL57h210
| PL57h210 | L, мм | 131 | Индуктивность фазы, мГн | 6.0±20% |
| Угловой шаг, ° | 1.8±5% | Сопротивление фазы, Ом | 1.0±10% | |
| Число фаз | 2 | Момент удержания,кгхсм | 28 | |
| Сопротивление изоляции, МОм | 100 | Момент инерции,г х см 2 | 405 | |
| Температура окруж. среды, °С | -20~40 | Масса, кг | 1.7 | |
| Рабочая температура, °С | 110 max | Количество валов | 1 | |
| Ток фазы,А | 4 | Тип | ||
| Размер шпоночного паза, мм |
Характеристики PL86h213
| PL86h213 | L1 ±1, мм | 113 | Сопротивление фазы, Ом | 1.0±10% |
| L2±1, мм | 35 | Момент удержания, кг х см | 1″ | |
| L3 , мм | 148 | 2 | 2700 | |
| Угловой шаг, ° | 1.8±5% | Количество валов | 1 | |
| Число фаз | 2 | Масса, кг | 3.5 | |
| Сопротивление изоляции, МОм | 100 | Радиальное биение вала двигателя (нагрузка 450г.) | ||
| Температура окруж. среды, °С | -20-40 | |||
| Рабочая температура, °С | 110 max | Индуктивность фазы, мГн | 6.3±20% | |
| Ток фазы, А | 4.2 |
Подключение, драйверы и инкодеры
Как правило, управление шаговыми моторами осуществляется посредством специальных драйверов, подключаемых к LTP-порту компьютера. Драйвер принимает генерируемые программой сигналы и трансформируют их в команды двигателю, передаваемые посредством подачи тока на обмотки. Программное обеспечение может регулировать траекторию, величину, скорость и величину движения.
Драйвер является блоком управления шаговым двигателем. В станках ЧПУ управляющие сигналы формируются на ЧПУ контроллерах, поэтому к драйверу подключают 4 вывода шагового двигателя, управляющие провода с контроллера ЧПУ (обычно 4 провода) и питание + и — с блока питания. Сигналы с контроллера поступают в драйвер, где уже они управляют переключением ключей силовой схемы питающего напряжения, идущего с блока питания, через эти ключи на двигатель.
Подбирать драйвер следует по максимальному выдаваемому току нужного напряжения на выводы, для обмоток двигателя. Ток выдаваемый драйвером должен быть, либо таким же, какой будет потреблять двигатель, либо выше. На драйвере есть переключатели, с помощью которых можно выставить желаемые параметры выходного напряжения и не сжечь двигатель.
Порядок подключения шагового двигателя к общей цепи зависит от того, сколько проводов в вашем приводе и как именно вы хотите использовать ШД. Моделей существует очень много и ля каждой из них существует своя схема подключения. Количество проводов в двигателе может варьироваться в диапазоне от четырех до шести. Четырехпроводные моторы используются исключительно с биполярными механизмами.
Каждым двум обмоткам соответствует два провода. Чтобы определить необходимые пары и связь между ними, вам пригодится метр. Самыми мощными считаются шести-проводные двигатели. В них для каждой отдельной обмотки предусмотрен центр-кран и два провода. Такой ШД можно подключать и к биполярным, и к униполярным аппаратам. Вам понадобится специальный измерительный прибор, чтобы разделить провода. Для однополярных устройств используйте все шесть проводов. Для биполярных достаточно одного центрального крана и провода для одной обмотки.
Центр-кран это обыкновенный провод, который еще называют «средним» или «центральным». Он есть в некоторых видах шаговых двигателей. В униполярных двигателях для каждой обмотки предусмотрено три провода. Два из них предназначены для подключения к транзисторам. А средний, то есть центр-кран, необходимо подключать к источнику напряжения. То есть, если вам не нужно подключать транзисторы, вы можете просто проигнорировать два боковых провода.
Пяти-проводные ШД схожи с шести-проводными, однако в них центральные провода выведены в один общий кабель, вместе с остальными. Без разрывов вам не удастся разделить между собой обмотки. Лучше всего обнаружить средний провод и соединить его с другими проводниками – это будет эффективным и самым не опасным вариантом.
Часто с ШД используются и энкодеры. Они являются просто датчиками, задача которых заключается в подаче сигналов программному обеспечению. Многие специалисты считают, что в большинстве случаев сочетать шаговый двигатель с энкодерами не имеет смысла и является неэффективной тратой денег. Но если имеет место быть нелинейная зависимость движения от количества шагов, когда необходимо построить пятую координату, энкодер будет незаменим. Он поможет с большей легкостью отслеживать углы поворота стола, что сэкономит время, избавив от необходимости применять более сложные методы.
Сферы применения, плюсы и минусы
Особое распространение ШД получили в высокотехнологической и тяжелой промышленности. Благодаря тому, что они являются весьма недорогостоящими, а устроены они довольно просто, спрос на них не угасает даже в 21-м веке. Часто вы можете обнаружить их в станках ЧПУ, роботизированной технике, на устройствах автоматизации (подача, дозировка, механизмы автоматической сварки и сборки и так далее).
Особо популярны шаговые двигатели в конструкциях координаторных столов и станков ЧПУ. Благодаря низкой стоимости программного обеспечения, необходимого для их функционирования, ШД являются незаменимыми в производственном секторе, в панелях управления, программирования и постановки задач и в других элементах механизмов.
Шаговые двигатели часто используются периферийных элементах ЭВМ, печатных станках и приборах, фрезерных станках и чертежных автоматах, системах контроля и управления, перфораторах, считывателях лент.
С ШД по популярности конкурируют серводвигатели, которые могут выполнять аналогичные функции в тех же условиях, что и шаговые моторы.
Достоинства шаговых двигателей в сравнении с серводвигателями:
- Исправно функционируют при большом диапазоне нагрузок.
- Фиксированный угол поворота, стандартизированные размеры мотора.
- Невысокая стоимость.
- Простота установки и применения, надежность, долговечность.
- При слишком высоких оборотах двигатель не сгорает, а пропускает шаги.
Основные недостатки ШД по сравнению с серводвигателями:
- Низкий КПД. Высокое потребление энергии вне зависимости от нагрузки.
- Резкое снижение крутящего момента при увеличении частоты оборотов.
- При таких размерах и массе мощность ниже ожидаемой.
- В процессе работы мотор сильно нагревается.
- Высокий уровень шума на высокой и средней частотах.
12
При конструировании очередного станка с ЧПУ, а попросту 3-х осевого фрезерного-сверлильного станочка для печатных плат и мелких фрезерных работ, у меня появилось неугомонное желание разложить всё «по полочкам».
Многие скажут, что тема не нова, существует множество проектов, множество технических и программных решений. Но, плавая в этом море информации, я постарался убрать всю «воду» и получить «сухой остаток».
Вот что из этого получилось…
Задача построения станка обычно сводится к трем подзадачам – механика, электроника, программное обеспечение. Видимо и статьи придется писать тоже три.
Поскольку у нас журнал всё-таки практической электроники, начну с электроники и чуть-чуть с механики!
Привод
Нужно двигать собственно фрезер в 3-х направлениях – XYZ, значит нужно 3 привода – 3 мотора с передачей вращения вала двигателя в линейное перемещение.О передаче…
Для фрезерного станка, где есть боковые усилия резания материала, желательно не применять ременные передачи, очень популярные в 3D принтерах. Буду применять передачу «винт-гайка». Самая бюджетная передача – обычный стальной винт и безлюфтовая, желательно бронзовая, гайка. Более правильная – винт с трапециевидной резьбой и гайка из капролона. Самая хорошая (и, увы, самая дорогая) шарико-винтовая пара, или ШВП. Об этом подробнее я еще расскажу далее…
У каждой передачи есть свой коэффициент, свой шаг – то есть насколько линейно по оси переместится фрезер за один оборот двигателя, например, на 4 мм.
Двигатель (мотор)
В качестве двигателя для привода определил шаговый двигатель (ШД)Почему шаговый? Что это вообще такое?
Двигатели есть переменного и постоянного тока, коллекторные и бесколлекторные, и так называемые «шаговые». В любом случае нам надо обеспечить какую-то точность позиционирования, например 0,01 мм. Как это сделать? Если двигатель имеет прямой привод – вал двигателя соединяют напрямую с винтом, то для обеспечения такой точности нужно повернуть его на некоторый угол. В данном случае, при шаге передачи 4 мм и желаемой точности перемещения 0,01 мм это… всего 1/400 оборота, или 360/400=0,9 градуса! Ерунда, возьмем обычный моторчик…
С «обычным» моторчиком без обратной связи никак не получится. Не вдаваясь в подробности, схема управления двигателем должна «знать», на какой угол повернулась ось. Можно конечно поставить редуктор – потеряем в скорости, и все равно без гарантии, без обратной связи вообще никак! На ось ставится датчик угла поворота. Такое решение надежное, но дорогое.
Альтернатива – шаговый двигатель (как он работает, почитайте сами). Можно считать, что за одну «команду» он повернет свою ось на определенный градус, обычно это 1,8 или 0,9 градуса (точность обычно не хуже 5%) – как раз то, что нужно. Недостаток такого решения – при большой нагрузке двигатель будет пропускать команды – «шаги» и может вообще остановиться. Вопрос решается установкой заведомо мощного двигателя. На шаговых двигателях и делается большинство любительских станочков.
Выбираем шаговый двигатель
2 обмотки, с минимальным током, минимальной индуктивностью и максимальным моментом – то есть максимально мощный и экономичный двигатель.Противоречивые требования. Малый ток – значит большое сопротивление, значит много витков провода обмотки двигателя, значит большая индуктивность. А большой момент – это большой ток и много витков. Выбираем в пользу большего тока и меньшей индуктивности. А момент надо выбирать исходя из нагрузки, но об этом потом.
Характеристики некоторых двигателей приведены в таблице:
Для небольшого станка с рабочим пространством размером 300×300х100 мм и легким фрезером вполне сгодятся двигатели с крутящим моментом 0,3Нм и выше. Оптимальным является ток от 1,5 до 2,5 Ампер, вполне подойдет FL42STh48-1684
Драйвер шагового двигателя
Двигатель есть. Теперь нужен драйвер – переключать напряжение на обмотках двигателя определенным образом, при этом не превышая установленный ток.Самое простое решение – источник заданного тока и две пары транзисторных ключей на каждую обмотку. И четыре защитных диода. И логическая схема чтобы менять направление. И… Такое решение обычно делают на микросхеме ULN2003A для двигателей с малым током, имеет много недостатков, не буду на них останавливаться.
Альтернатива – специализированные микросхемы «всё в одном» – с логикой, транзисторами и диодами защиты внутри (или снаружи). А еще такие микросхемы контролируют ток обмоток и регулируют его с помощью ШИМ-а, а так же могут реализовывать режим «полушаг», а некоторые режимы 1/4 шага, и 1/8 шага и т. д. Эти режимы позволяют повысить точность позиционирования, повысить плавность движения и снизить резонанс. Обычно достаточно режима «полушаг», что позволит повысить теоретическую точность линейного позиционирования (в моем примере до 0,005 мм).
Что внутри микросхемы драйвера шагового двигателя? Блок логики и управления, источники питания, ШИМ со схемами формирования момента и времени коммутации обмоток, выходные ключи на полевых транзисторах, компараторы обратной связи – ток контролируется по падению напряжения на резисторах (Rs) в цепи питания обмоток. Ток двигателя задается опорным напряжением.
Для реализации этих функций существуют и другие схемные решения, например, с использованием микроконтроллеров PIC или ATMEGA (опять же с внешними транзисторами и защитными диодами). На мой взгляд, они не обладают значительным преимуществом перед «готовыми» микросхемами и я их в данном проекте использовать не буду.
Богатство выбора
На сегодняшний день есть достаточно много различных микросхем и достаточно много уже готовых плат и модулей драйверов ШД. Можно купить готовый, а можно «изобретать велосипед», тут каждый решает по-своему.Из готовых – наиболее распространённые и недорогие драйверы на микросхемах Allegro A4988 (до 2А), Texas Instruments DRV8825 (до 2,5А).
Поскольку модули изначально разрабатывались для использования в 3D принтерах типа Rep-rap проекта Arduino, они не являются законченными модулями (например, им нужно еще питание логики (+5V), которое подается с так называемой рампы (Ramp).
Еще есть решения на DRV8811 (до 1,9 А), A3982 (до 2 А), A3977 (до 2,5 А), DRV8818 (до 2,5 А) DRV8825 (до 2,5 А), Toshiba TB6560 (до 3 А) и другие.
Поскольку мне интересно что-то сделать самому, плюс появилась возможность «попробовать на вкус» микросхемы Allegro A3982 и A3977, решил сделать пару драйверов самостоятельно.
Готовые решения на A4988 не понравились, прежде всего, из-за миниатюризации размеров печатной платы в ущерб хорошему охлаждению. Типовое сопротивление открытых транзисторов у A4388 при токе 1,5А 0,32+0,43 Ом, плюс 0,1-0,22 Ома «измерительный» резистор – получается около 0,85 Ом. А таких каналов два, и хотя и работают они импульсно, но 2-3 Ватта тепла надо рассеивать. Ну не верю я в многослойную плату и малюсенький радиатор охлаждения – в даташите нарисована плата гораздо больших размеров.
Провода мотора нужно сделать короткими, драйвер устанавливать рядом с двигателем. Существует 2 технических решения в звукотехнике: длинный сигнальный кабель к усилителю + короткие провода к акустической системе, или короткий сигнальный кабель к усилителю + длинные провода, а акустической системе. Оба решения имеют свои плюсы и минусы. С моторами – так же. Я выбрал длинные провода управления и короткие провода к мотору.
Управляющие сигналы – «шаг» (step), «направление» (dir), «включение» (enable), индикация состояния сигналов управления. Некоторые схемы не используют сигнал «Enable», но это приводит в режиме простоя к ненужному нагреву и микросхемы и двигателя.
Одно питание 12-24 вольта, источник питания логики (+5B) – на плате. Размеры платы – достаточные для хорошего охлаждения, двухсторонняя печать с большой областью «меди», возможность приклеить на микросхему радиатор (применяемой для охлаждения памяти видеокарт).
Драйвер ШД на микросхеме Allegro A3982
Напряжение питание силовое: 8…35 В Напряжение питание логики: 3,3…5 В Выходной ток (максимальный, зависит от режима и охлаждения): ±2 А Типовое сопротивление открытых транзисторов (при токе 1,5А): 0,33+0,37 Ом
Драйвер ШД на микросхеме Allegro A3977
Основные характеристики и блок-схема:Напряжение питание силовое: 8…35 В Напряжение питание логики: 3,3…5 В Выходной ток (максимальный, зависит от режима и охлаждения): ±2,5 А Типовое сопротивление открытых транзисторов (при токе 2,5А): 0,33+0,45 Ом
Схема и прототип
Проектировал в среде DipTrace. Драйвер A3982 включен по схеме из документации производителя. Включен режим «полушаг». Дополнительно для надежной работы сигналов управления и индикации применил микросхему логики 74НС14 (с триггерами Шмитта). Можно было сделать гальвано-развязку на оптронах, но для маленького станка я решил ее не делать. Схема на A3977 отличается только дополнительными джамперами режима шага и более мощным разъемом питания, пока в «железе» не реализована.
Печатная плата
Процесс изготовления – ЛУТ, двухсторонняя. Габариты 37×37 мм, крепеж – как у двигателей, 31×31 мм.Для сравнения – слева мое творчество, справа драйвер на A4988.
Приведеные примеры расчета применимы не только к шаговым, но и к другим типам двигателей. При учете скорости нужно учитывать, что для шаговых двигателей указывается частота – шаги/сек.
| Выбор шагового двигателя для грузоподъемной установки | |
| Выбор шагового двигателя для транспортной тележки | |
| Определение крутящего момента шагового двигателя в устройстве с использованием винтовых передач | |
| Момент, требуемый от шагового привода в системе с вращающимися цилиндрами | |
| Определение момента в механизмах с реечной передачей | |
Особенности работы ШД предъявляют весьма жесткие требования к согласованию параметров выбираемого двигателя с заданной нагрузкой. Это особенно актуально в разомкнутых системах дискретного привода, когда пропуск двигателем хотя бы одного управляющего импульса приводит к ошибке преобразования электрического сигнала управления в угол, который система исправить не в состоянии. Проверку на нагрев шаговых двигателей обычно не производят, так как они рассчитаны на длительный режим прохождения импульсов тока по обмоткам управления.
При выборе шагового двигателя, прежде всего, следует ориентироваться на потребляемую приводом (двигатель + блок управления) из сети мощность, величину напряжения питания, требуемый крутящий момент на выходном валу, скорость вращения вала и момент инерции нагрузки. Для одного и того же привода, при разных величинах напряжения питания, потребляемая мощность привода P=U*I (напряжение*ток) различается. Например, привод D5779 при напряжении питания 50В потребляет из сети 150Вт, при напряжении питания 30В – 90Вт. КПД шаговых приводов в диапазоне частот 1 – 5КГц, как и КПД синхронных двигателей с постоянными магнитами составляет 80-90%.
Мощность на выходном валу привода P=M*ω (крутящий момент*угловая скорость). Очевидно, что мощность на выходном валу не может превышать потребляемую из сети мощность.
Закон сохранения энергии для системы, состоящей из двигателя и нагрузки на валу, повернувшейся на один полушаг, выглядит следующим образом:
M двигателя *φ=0,5*J*ω 2 + M нагрузки *φ + М магн *φ +М трения *φ
где φ – угол поворота
J – приведенный к валу момент инерции системы
ω – угловая скорость
M нагрузки – момент нагрузки
М магн – момент сопротивления, создаваемый постоянными магнитами двигателя, примерно 5% от величины M двигателя
М трения – момент трения в системе
Отсюда максимальная скорость, с которой может сделать первый шаг шаговый двигатель в системе с приведенным к валу моментом инерции J и нагруженный моментом M нагрузки:
ω =(2*φ*(M двигателя – M нагрузки – М магн – М трения)/J) 1/2
На практике необходимо также учитывать электрические переходные процессы в фазах двигателей, которые зависят как от напряжения питания и индуктивности фаз двигателей, так и от способа управления двигателем. Самыми динамичными являются двигатели с минимальной индуктивностью. Обычно стартовые частоты лежат в диапазоне 800-1000Гц (2-2,5 об/сек в полушаговом режиме). Исходя из этого для шагового двигателя, работающего в полушаговом режиме, величина ускорения не должна превышать 4рад/сек 2 .
Когда требуемый момент, определен, выбор шагового двигателя зависит от предпочтительных габаритов, присоединительных размеров, цены двигателя и блока управления для него.
Если блок управления уже есть (или выбран), необходимо, чтобы ток фазы шагового двигателя не превышал возможности блока управления. Также нужно иметь ввиду число выводов, которые можно подключить к имеющемуся блоку управления.
Любая разработка начинается с выбора компонентов. При разработке ЧПУ станка очень важно правильно подобрать шаговые двигателя . Если у вас есть деньги на покупку новых двигателей, в таком случае нужно определить рабочее напряжения и мощность двигателя. Я купил себе для второго ЧПУ станка шаговые двигателя вот такие: Nema17 1.7 А .
Если у вас нет достаточно денег или вы просто пробуете свои силы в данной сфере. То вы скорее всего будите использовать двигателя из принтеров . Это самый недорогой вариант. Но тут Вы столкнетесь с рядом проблем. У двигателя может быть 4, 5, 6, 8 – проводов для подключения. Как их подключить к драйверам L298n и .
Давайте разберемся по порядку. Какие шаговые двигателя бывают. Если вы видите четное количество выводов это биполярный шаговый двигатель . Расположение обмотки для данного двигателя вот такое.
Если
у двигателя
5 выводов, это униполярный шаговый
двигатель . Вот так выгладит
его схема.
Наши драйвера рассчитаны на двигателя с 4 выводами . Как быть? Как их подключить?
Биполярные ШД с 6-ю выводами подключаются к драйверу двумя способами:
В
данном случае ШД имеет момент в 1.4 раза
больше. Момент более стабилен на низких
частотах.
При
таком типе подключения нужно уменьшить
ток, подаваемый на обмотки двигателя
в √2 раз. Например, если номинальный
рабочий ток двигателя составляет 2 А,
то при последовательном включении
обмоток требуемый ток – 1.4 А, то есть в
1.4 раза меньше.
Это можно легко понять из следующих рассуждений.
Номинальный рабочий ток, указанный в каталоге, рассчитан на сопротивление одной обмотки (R – именно оно приведено в каталоге). При последовательном включении обмоток сопротивление объединенной обмотки возрастает в два раза (2R).
Потребляемая мощность ШД – I*2 * R
При последовательном включении обмоток потребляемая мощность становится Iпосл.*2 * 2 * R
Потребляемая мощность не зависит от типа подключения, поэтому I*2 * R = Iпосл.*2 * 2* R, откуда
Iпосл.= I/ √2, т.е.
Iпосл.= 0.707 *I.
Так как крутящий момент двигателя прямо пропорционален величине магнитного поля, создаваемого обмотками статора, то он возрастает с увеличением числа витков обмотки и убывает с уменьшением ток, пропускаемого через обмотки. Но так как ток уменьшился в √2 раз, а число витков обмотки увеличилось в 2 раза, то крутящий момент возрастет в √2 раз.
Tпосл. = 1.4 * T.
Во втором случае момент более стабилен на высоких частотах. Параметры ШД при таком подключении соответствуют заявленным в datasheet, (момент, ток), момент более стабилен на высоких частотах .
Униполярный шаговый двигатель можно переделать.
Для этого нужно разобрать шаговый
двигатель и перерезать провод соединяющий
центр обмоток. И при подключении общий
провод подключать ни куда не нужно.
В итоге у нас получается биполярный двигатель с 4 выводами.
Шаговые двигателя с 8-ю выводами можно подключить тремя способами.
Подключение А – шаговик работает с характеристиками, заявленными в описании (момент, ток), момент более стабилен на высоких частотах.
Подключение B – момент 1.4 раза, момент более стабилен на низких частотах (относительно А).
Подключение C – момент 1.96 раза, момент более стабилен на высоких частотах (относительно А).
Вот мы и решили проблему подключения шаговых двигателей. Но не все двигателя у нас заработают. Нужно еще определить рабочее напряжение двигателей. Самый правильный способ это найти datasheet. Так все параметры есть. Но не ко все двигателя из принтера можно найти datasheet. В таких случаях я пользуюсь вот такой таблицой.
Не знаю на сколько данная таблица верная но у меня все сходиться и работает как надо.
Двигателя я выбираю чтобы рабочее напряжение было меньше или равно напряжению источника питания. Для двигателей рассчитанных на меньшее напряжения необходимо настроить ток ниже.
Настраивать будем в следующей статье. Не пропустите !
Подписывайтесь на мой канал на Youtube и вступайте в группы в
Учебное пособие по подключению шагового двигателя– 42 бота
Иногда вы можете встретить старый шаговый двигатель, спасенный от принтера, или старый дисковод для гибких дисков. Если вам повезет, на двигателе будет номер детали, и, покопавшись, вы получите техническое описание. Однако часто у вас будет мотор без какой-либо маркировки, а из него торчат четыре или шесть разноцветных проводов. Во-первых, вам нужно выяснить, как провода соединены в пары для образования катушек внутри двигателя. Метод проб и ошибок может работать, но есть способ лучше! Все, что вам нужно, – это мультиметр.
Как определить пары катушек четырехпроводного шагового двигателя с помощью мультиметра
Если ваш шаговый двигатель имеет 4 провода, это биполярный шаговый двигатель. Биполярные шаговые двигатели имеют две обмотки, которые не связаны друг с другом и имеют внутреннюю разводку следующим образом:
Поскольку катушки A и B на схеме выше не подключены, сопротивление между выводами A1 и B1 или между A1 и B2 будет бесконечным. Сопротивление между A1 и A2 или между B1 и B2 будет определенно меньше бесконечного (хотя и больше нуля), поскольку они являются частью одной обмотки.Физическое расположение проводов или цвета могут иногда указывать на соединение, как на фотографиях ниже. Тем не менее, простая проверка с помощью мультиметра, настроенного на опцию измерения сопротивления, может сэкономить вам много времени на поиск и устранение неисправностей в коде и проводке.
Изображение 1: Черный и желтый провод не являются частью одной катушки, так как мультиметр показывает высокое (бесконечное) сопротивление
Изображение 2: Оранжевый и желтый провод являются частью одной катушки, так как мультиметр показывает сопротивление примерно 18 Ом.
Теперь, когда мы определили, какие провода принадлежат каждой катушке, как определить правильную полярность шагового двигателя? К сожалению, это невозможно сделать с помощью мультиметра… Подключите двигатель к выбранному приводу. Подключите питание и запустите код, чтобы вращать двигатель по часовой стрелке. Если двигатель вращается в ожидаемом направлении, у вас правильная полярность. Если он вращается в обратном направлении, вам нужно поменять полярность одной из двух пар (неважно какой).
Как определить пары катушек шестипроводного шагового двигателя с помощью мультиметра
Шаговые двигателис шестью проводами являются униполярными и имеют по одной обмотке на фазу (как биполярные шаговые двигатели), но с центральным отводом. Внутренняя проводка этих моторов выглядит так:
Глядя на диаграмму выше, мы можем предположить, что сопротивление между A1 и AC будет вдвое меньше, чем между A1 и A2. Это потому, что между AC и A1 меньше провода, чем между двумя концами катушки A, A1 и A2.То же самое относится к сопротивлению между BC и B1 или B2. Как и в случае с двухполюсным 4-проводным шаговым двигателем, нет соединения (бесконечного сопротивления) между любыми проводами от катушки B и катушки A. Пришло время проверить теорию!
Изображение 3: Черный и Коричневый провода, очевидно, являются частью одной катушки (сопротивление приблизительно 194 Ом)
Изображение 4: Черный и верхний красный провод (на этом шаговом двигателе два красных провода) также являются частью одной катушки (сопротивление приблизительно 97 Ом).
Верхний красный должен быть центральным отводом катушки с черным и коричневым проводами, так как сопротивление между красным и черным проводами вдвое меньше сопротивления между черным и коричневым проводами. Для правильного измерения вы также должны измерить сопротивление между верхним красным и коричневым проводом, чтобы убедиться, что оно также составляет около 97 Ом.
Изображение 5: Желтый провод не должен быть частью той же катушки, что и черный, коричневый и верхний красный провод.Мультиметр показывает отсутствие электрического соединения между желтым и черным проводами.
Чтобы убедиться в этом, я также дважды проверил сопротивление между нижним красным проводом и желтым проводом, а также сопротивление между желтым и оранжевым проводами. Другое измерение подтвердило, что два красных провода также не подключены.
Окончательный приговор:
Одна катушка – это черный и коричневый провода, с верхним красным проводом в качестве центрального отвода.
Другая катушка – это желтый и оранжевый провода, с нижним красным проводом в качестве центрального отвода.
Если у вашего двигателя 5 проводов. проверьте, не подключен ли один из проводов к корпусу двигателя. Если это так, отметьте его и затем выполните те же испытания, что и для четырехпроводного шагового двигателя. Если нет, то вы смотрите на униполярный двигатель, в котором соединены два центральных выступа. Дешевый шаговый двигатель 28byj-48 (см. Руководство) является примером этого.
Вы все еще можете использовать тест сопротивления для определения центрального отвода, но сопротивление между другими 4 проводами будет таким же из-за общего центрального отвода.Здесь пригодятся метод проб и ошибок или хорошая документация.
Если у вашего двигателя 8 проводов, внутренняя проводка должна выглядеть следующим образом.
У меня еще никогда не было такого типа шаговых двигателей, поэтому не могу говорить об этом по своему опыту, но использование мультиметра и проверка проводов в паре должны дать вам пары (в конечном итоге). Вам нужно будет проделать дополнительную работу, чтобы определить, какие пары находятся на одной катушке. Скорее всего, это потребует некоторых проб и ошибок, используя драйвер шагового двигателя.
Униполярный шаговый двигатель против биполярного шагового двигателя | OSM-Optimal Step Motor …
В двухфазном шаговом двигателе существует два основных устройства намотки электромагнитных катушек: биполярный и униполярный. В этой статье обсуждается униполярный и биполярный шаговый двигатель.
Униполярные и биполярные соединения (2-фазные двигатели)
Униполярные и биполярные полукатушки, поскольку мы используем меньше оборотов, не дает нам большого крутящего момента на низкой скорости, но из-за низкой индуктивности удерживает крутящий момент до высоких скоростей.
Биполярная серияиспользует полную катушку, что обеспечивает очень хороший крутящий момент на низкой скорости. Но из-за высокой индуктивности крутящий момент быстро падает.
Униполярные шаговые двигателиУниполярные шаговые двигатели имеют две обмотки на фазу, по одной для каждого направления магнитного поля. Поскольку в этом устройстве магнитный полюс можно перевернуть без переключения направления тока, схему коммутации можно сделать очень простой (например, с одним транзистором) для каждой обмотки.Обычно для данной фазы один конец каждой обмотки делается общим: это дает три вывода на фазу и шесть выводов для типичного двухфазного двигателя. Часто эти две общие фазы соединены внутри, поэтому у двигателя всего пять выводов.
Микроконтроллер или контроллер шагового двигателя можно использовать для активации управляющих транзисторов в правильном порядке, и эта простота эксплуатации делает униполярные двигатели популярными среди любителей; они, вероятно, являются самым дешевым способом получения точных угловых перемещений.
(Для экспериментатора один из способов отличить общий провод от провода на конце катушки – это измерить сопротивление.Сопротивление между общим проводом и проводом на конце катушки всегда вдвое меньше, чем между проводом на конце и на конце катушки. Это связано с тем, что на самом деле длина катушки в два раза больше между концами и только половина от центра (общего провода) до конца.) Быстрый способ определить, работает ли шаговый двигатель, – это короткое замыкание каждые две пары и попробуйте повернуть вал, всякий раз, когда чувствуется сопротивление выше нормального, это означает, что цепь конкретной обмотки замкнута и фаза исправна.
Биполярные шаговые двигатели
Биполярные двигатели имеют одну обмотку на фазу. Ток в обмотке необходимо реверсировать, чтобы перевернуть магнитный полюс, поэтому схема управления должна быть более сложной, обычно с Н-мостовой схемой (однако есть несколько готовых микросхем драйверов, чтобы сделать это несложным делом. ). На каждую фазу приходится два вывода, ни одного общего.
Поскольку обмотки используются лучше, они более мощные, чем униполярный двигатель того же веса.Это связано с физическим пространством, занимаемым обмотками. У униполярного двигателя вдвое больше проводов в том же пространстве, но в любой момент времени используется только половина, следовательно, его КПД составляет 50% (или примерно 70% доступного крутящего момента). Хотя биполярный привод сложнее управлять, обилие микросхемы драйвера означает, что этого добиться гораздо проще. 8-выводный шаговый двигатель намотан как униполярный шаговый двигатель, но выводы не имеют общего внутреннего соединения с двигателем. Такой двигатель можно подключить в нескольких конфигурациях.
Джейсон Бабкок + униполярный шаговый двигатель
Привод униполярного шагового двигателя:
В этой записи показана конфигурация, которую я использовал для работы униполярного шагового двигателя AstroSync 12 В постоянного тока, 130 Ом. Я купил два таких мотора где-то на Канал-стрит и понятия не имел об их характеристиках и даже о том, работают ли они. Я знал кое-что, основываясь на более ранних чтениях. Во-первых, большинство шаговых двигателей с более чем 5 проводами обычно можно определить как униполярные шаговые двигатели.Униполярные двигатели могут управляться микрочипом ULN2004A. Эта ИС представляет собой массив транзисторов Дарлингтона, которые могут принимать небольшой входной ток от микроконтроллера (в нашем случае BX-24) и использовать его для включения двигателя в определенной последовательности.
Первое, что я сделал, – это попытался выяснить, как были сконфигурированы провода шагового двигателя, измерив сопротивление каждого провода (по сравнению со всеми другими проводами) с помощью мультиметра. Я составил таблицу истинности, как показано ниже (обратите внимание, что все значения указаны в Ом, а inf означает бесконечное сопротивление):
| оранжевый | желтый | красный1 | красный2 | желто-коричневый | черный | |
| оранжевый | – | 259 | 130 | инф | инф | инф |
| желтый | 259 | – | 130 | инф | инф | инф |
| красный1 | 130 | 130 | – | инф | инф | инф |
| красный2 | инф | инф | инф | – | 133 | 130 |
| желто-коричневый | инф | инф | инф | 130 | – | 260 |
| черный | инф | инф | инф | 130 | 260 | – |
Подключение шагового двигателя:
Основываясь на таблице истинности, я обнаружил, что рисунок катушки составляет 130 Ом между оранжевым и красным1, желтым и красным1, желтовато-коричневым и красным2 и черным и красным2.Всего 260 Ом получается между оранжевым и желтым, и желто-коричневым с черным. Это показано на рисунке ниже.
ULN2004A:
Следующим шагом было подключение соответствующих проводов от шагового двигателя к транзистору Дарлингтона ULN2004A. На следующем рисунке показано, как это было сделано. Внешние катушки, оранжевая, желтая, желто-коричневая и черная, подключены к выходным контактам (16-13) ULN2004A. Контакт 9 ULN2004A подключен к источнику питания +12 В постоянного тока.Обратите внимание, что провода красный1 и красный2 также подключены к +12 В постоянного тока.
BX-24 Микроконтроллер:
Обратите внимание, что для шагового двигателя требуется 12 вольт, поэтому я решил разместить схему шагового двигателя на отдельной макетной плате (обратите внимание, что регулятор напряжения используется только для подачи 5 вольт на светодиод, поэтому я знаю, что питание идет на ULN2004A и шаговый двигатель. ). Контакты ввода / вывода от BX-24 подключены к ULN2004A, как показано на последнем рисунке.Я использовал приведенный ниже код BX-24, чтобы включить двигатель в правильной последовательности:
dim motorStep (от 1 до 4) как байт
затемнить thisStep как целое число
sub main ()
задержка вызова (0,5) 'запуск программы с задержкой в полсекунды
dim i как целое число
'сохранить значения для 4 возможных состояний выводов шагового двигателя
'в 4-байтовом массиве. программа stepMotor будет проходить через
'эти четыре состояния для перемещения двигателя. Это способ установить
'значение сразу на четырех выводах.Восемь контактов с 5 по 12
'представлен в памяти в виде байта с именем register.portc. Мы установим
'register.portc для каждого значения массива, чтобы установить
'пины 9,10,11 и 12 одновременно с каждым шагом.
motorStep (0) = bx0000_1010
motorStep (1) = bx0000_0110
motorStep (2) = bx0000_0101
motorStep (3) = bx0000_1001
'установите последние 4 контакта порта C на вывод:
register.ddrc = bx0000_1111
'установите все контакты порта C в низкий уровень:
register.portc = bx0000_0000
делать
'переместите двигатель вперед на 100 шагов.'примечание: выполняя операцию по модулю над i (i mod 4),
'мы можем позволить мне подняться так высоко, как мы хотим, и этот шаг
'будет равно 0,1,2,3,0,1,2,3 и т. д. до конца
'цикла for-next.
для i = от 1 до 100
thisStep = я мод 4
вызов stepMotor (thisStep)
следующий
'переместить мотор назад
для i = 100 к 1 шагу -1
thisStep = я мод 4
вызов stepMotor (thisStep)
следующий
петля
конец субмарины
sub stepMotor (byref whatStep как целое число)
'устанавливает значение восьми контактов порта c равным whatStep
регистр.portc = motorStep (whatStep)
call delay (0.1) 'изменяйте эту задержку, чтобы сделать шаговый шаг.
конец субмарины
Разница между биполярными приводами и униполярными приводами для шаговых двигателей
Работа над моторизованной конструкцией требует определенных знаний о двигателях и контроллерах. эта статья Основное внимание уделяется шаговым двигателям, которые представляют собой бесщеточные двигатели постоянного тока с большим количеством полюсов. Этот технология, как правило, работает в разомкнутом контуре без какого-либо датчика обратной связи, что означает, что ток обычно подается на фазы, не зная положения ротора.Ротор перемещается для совмещения с магнитным потоком статора, затем ток может подаваться на следующую фазу.
Мы рассмотрим два способа подачи тока в катушку: биполярный и униполярный. В этой статье мы объясним различия биполярных и униполярных двигателей и способов управления ими. Мы покажем преимущества и ограничения обеих технологий.
Рассмотрим пример четырехступенчатого шагового двигателя с постоянными магнитами. (см. рисунок 1). Ротор выполнен с однополюсным магнитом, а статор состоит из двух фаз: фазы A и фазы B.
- В униполярном режиме: ток всегда течет в одном направлении. Каждый катушка предназначена для одного направления тока, что означает, что катушка A + или катушка A- запитана. Катушки A + и A- никогда не питаются вместе.
- В биполярном режиме: ток может течь в обоих направлениях во всех катушках. В фазы A + и A- запитываются вместе.
Для биполярного двигателя требуется минимум одна катушка на фазу, а для униполярного двигателя требуется минимум две катушки на фазу.Давайте рассмотрим оба варианта более подробно.
МОТОСТРОЕНИЕ
УНИПОЛЯРНЫЙ
В униполярной конфигурации каждая фаза двигателя состоит из двух обмоток катушки. С двухфазным двигатель состоит из фаз A и B, двигатель имеет четыре обмотки катушки (см. рисунок 2).
- Фаза A состоит из A +, A-
- Фаза B состоит из B +, B-
Для каждой катушки ток может течь только в одной одиночной направление. Вот почему мы называем это однополярным.
В случае привода напряжения система управления очень легко, потому что на катушку приходится один транзистор (переключатель). Когда транзистор закрыт, катушка запитана. Смягчить, транзисторы поочередно закрываются и открываются.
Транзисторы Q1 и Q2 не могут быть закрыты одновременно. время. Для питания фазы A замыкаем либо транзистор Q1, либо Q2, в зависимости от текущего направления, в котором мы хотим работать (см. рисунок 3).
При униполярном управлении только половина фазы питание за один раз, что означает, что ток использует только половину объема котла.Обычно с последовательным приводом напряжения применяются сопротивления для уменьшения электрического времени постоянная (подробнее см. ниже).
БИПОЛЯРНЫЙ
Для биполярных двигателей требуется только одна обмотка катушки на фазу. Мы назовите это биполярным, потому что ток может идти в обоих направлениях на катушку. Для управления используются восемь транзисторов с двумя Н-мостами. требуется (см. рисунок 4).
Для коммутации транзисторы альтернативно закрывается и открывается, как показано ниже (см. рисунок 5).
Преимущество биполярного привода в том, что вся медь на фаза используется.
Такие биполярные приводы используются либо в приводах напряжения, либо в Источник тока. В случае источника тока, обычно ток в каждая фаза управляется с помощью широтно-импульсной модуляции (ШИМ) .
ПРЕИМУЩЕСТВА И ОГРАНИЧЕНИЯ
ПРИВОД НАПРЯЖЕНИЯ
В случае привода напряжения управлять униполярными двигателями очень просто, поскольку для этого требуется простая электроника с четырьмя транзисторами.Это очень экономичное решение. Инженеры интересовались этим типом решений много лет назад, когда электронные компоненты были дороже, чем сегодня.
Биполярные двигатели могут приводиться в движение от источника напряжения; для этого требуются мосты 2H.
ПРИВОД ТОКА
Для текущего привода мы рекомендуем выбрать биполярный режим. Для работы в текущем приводе с униполярной технологией требуется более сложное электронное решение для более низких характеристик двигателя, чем с биполярным драйвером.
МЕРЫ ПРЕДОСТОРОЖНОСТИ ПРИ ПРИВОДЕ НАПРЯЖЕНИЯ
Из-за эффекта индуктивности току в катушке требуется некоторое время, чтобы подняться. Либо с униполярным, либо с биполярным, вы можете добавьте последовательное сопротивление, чтобы уменьшить электрическую постоянную времени (L / R).
При добавлении внешнего сопротивления ток уменьшается (i = U / (R + r)). Таким образом, с дополнительным сопротивлением для такую же поставленную мощность, у нас будет:
- На низкой скорости меньший крутящий момент. Ток ниже из-за рассеиваемой во внешнем сопротивлении джоулевой мощности, так как крутящий момент пропорционален току, двигатель будет обеспечивать меньший крутящий момент.
- На высокой скорости больше крутящий момент. Даже если некоторая мощность в джоулях будет рассеиваться на внешнем сопротивлении, двигатель сможет для обеспечения большего крутящего момента благодаря более низкой электрической постоянной времени, позволяющей быстрее нарастать току в катушке.
Примечание: если мы увеличим напряжение питания, мы сможем компенсировать более низкий ток, но общая энергоэффективность будет быть уменьшенным. Крутящий момент увеличивается на высокой скорости и сохраняется таким же на низкой.
УДЕРЖИВАЮЩИЙ МОМЕНТ
Удерживающий момент – это максимальный крутящий момент, который двигатель может удерживать при остановке.Удерживающий момент пропорционален постоянному крутящему моменту. и ток в фазе.
Создание более высокого крутящего момента может быть достигнуто за счет увеличения количество витков катушки или увеличивая текущий поток.
Увеличение тока, выделяемого лишним теплом из-за диссипация джоулевых потерь (P джоуль = R × i 2 ). В подача тока ограничена тепловыми характеристиками катушка. Температура змеевика обычно может достигать максимальная, допустимая температура змеевика, обычно 100 ° C или 130 ° C, в зависимости от типа двигателя.
Теперь давайте посмотрим на потери в джоулях в обеих комбинациях (см. Рисунок 6), учитывая 1 фазу ВКЛ:
Учитывая, что каждая отдельная катушка имеет собственное сопротивление, индуктивность и постоянную крутящего момента, и если потери в джоулях одинаковы
для обоих случаев P джоуль uni = P джоуль uni = P 0
… тогда мы будем иметь:
При тех же рассеиваемых потерях джоулей биполярный двигатель может производить на √2 (≈40%) больше крутящего момента, чем униполярный привод.
При той же электрической мощности биполярный привод дает лучшие результаты, чем однополярный.
ДИНАМИЧЕСКИЙ РЕЖИМ
Как показано выше, при той же рассеиваемой мощности биполярный режим может обеспечить на 40% больше крутящего момента. Однако при высоком скорость в приводе напряжения униполярный двигатель может обеспечить более высокий крутящий момент, чем биполярный двигатель, поскольку ток может идти быстрее в катушка. Вы можете увидеть пример ниже (см. Рисунок 7).
ПРОВОДА / ПОДКЛЮЧЕНИЕ ДВИГАТЕЛЯ
Биполярный двигатель обычно имеет четыре провода. тогда как униполярный двигатель имеет шесть или восемь провода, если средняя точка не подключена (см. рисунок 8).2) и такой же крутящий момент характеристики при той же электрической мощности (см. рисунок 9).
Сопротивление серийной сборки в четыре раза выше, чем у параллельная сборка.
Для последовательного подключения требуется вдвое больший ток и половина напряжение параллельного подключения.
Последовательное или параллельное соединение соответствует источнику питания.
ЗАКЛЮЧЕНИЕ
Как униполярные, так и биполярные сборки имеют преимущества (см. Рисунок 10).
В прошлом широко использовалось униполярное управление.В связи с повышением стоимости электроники, сейчас тенденция состоит в том, чтобы работать с биполярный в текущем приводе. Для привода напряжения однополярный по-прежнему остается экономически эффективным вариантом.
СВЯЗАТЬСЯ С ИНЖЕНЕРОМ
Униполярные шаговые двигатели и биполярные шаговые двигатели
Почему HobbyCNC использует униполярные шаговые двигатели?
А чем отличаются биполярные шаговые двигатели от униполярных? Один лучше другого? Начнем с различий между двумя типами двигателей *.
Шаговый двигатель в разобранном виде
(Источник: http://jssmotor.en.made-in-china.com/product/rvkmWoRMZIcB/China-2-Phase-1-8-Degree-NEMA-34-Stepper-Motor -86HS118-6004A-.html)
Полярный двигатель uni работает с одной полярностью на каждой катушке. Для управления ими требуется более простая электроника. Однако они требуют двух пар обмоток, соединенных в обратном порядке. Чтобы упростить, включите одну катушку, и магнит будет север-юг. Включите другую катушку, и магнит теперь юг-север.(или «сосать» и «дуть», как говорил один из моих преподавателей в колледже). Униполярные двигатели имеют 5, 6 или 8 проводов. Больше проводов = больше сложности для подключения. Несущественно, но более сложно по сравнению с 4-мя проводами.
Полярный двигатель bi имеет только одну пару обмоток, и электроника для их управления должна иметь возможность переключать полярность, как правило, с помощью схемы драйвера «Н-мост». Поскольку двигатель имеет только одну пару (две) обмотки, а не две пары (4 обмотки), биполярный двигатель того же веса теоретически может иметь большую мощность.Биполярные двигатели обычно имеют 4 провода, поэтому их проще подключать.
По стоимости оба мотора одинаковы. Основная масса двигателя приходится на корпус (статор в сборе) и ротор, а не на проводку.
Итак, почему HobbyCNC использует униполярные шаговые двигатели?
Ну, дело даже не в моторах. Речь идет о микросхеме драйвера (Allegro Microsystems SLA7078MPR). Это зрелый, прочный, легко «отводимый» и прочный чип драйвера. Имеет встроенную защиту от короткого замыкания.Это очень надежный чип. Цена на него очень хорошая для рынка ЧПУ для хобби, и это помогает нам снизить стоимость. Кроме того, он легко паяется, что немаловажно, поскольку мы продаем только комплекты. Мы с огромным успехом использовали этот чип уже много-много лет в тысячах плат.
И с практической точки зрения, с 8 проводами не так уж и сложно работать. Действительно.
Чтобы узнать немного больше, на Adafruit.com есть отличная статья с рисунками и отличными изображениями.
* Это не полное руководство по шаговым двигателям.Есть много типов и конструкций двигателей, много размеров и много ценовых диапазонов. Это описание является основным для обычных простых шаговых двигателей, используемых в машинах любительского уровня.
Шаговый двигатель с центральными отводами на двухфазных обмотках
Описание
Блок Unipolar Stepper Motor представляет собой шаговый двигатель. двигатель с центральными отводами на двух фазных обмотках. Обмоточные токи и механическая мощность определяется следующими уравнениями:
diA + dt = (vA + −RiA + −eA +) / L
diA − dt = (vA −− RiA −− eA -) / L
diB + dt = (vB + −RiB + −eB +) / L
diB − dt = (vB −− RiB −− eB -) / L
Te = −Km (iA + −iA −− eA + −eA − Rm) sin (Nrθ) + Km ( iB + −iB −− eB + −eB − Rm) cos (Nrθ) −Tdsin (4Nrθ)
где:
e A + – индуцированная обратная ЭДС через A + до A0 полуобмотка.
e A- – индуцированная обратная ЭДС через A- до A0 полуобмотка.
e B + – индуцированная обратная ЭДС через B + до B0 полуобмотка.
e B- – индуцированная обратная ЭДС через B- до B0 полуобмотка.
i A + – ток, идущий от порт A + к центральному ответвителю A0 порт.
i A- – ток, идущий от порт A- к центральному крану A0 порт.
i B + – это ток, идущий от порт B + к центральному ответвителю B0 порт.
i B- – это ток, идущий от порт B- к центральному крану B0 порт.
v A + – напряжение на A + порт относительно A0 центральный кран.
v A- – напряжение на A- порт относительно A0 центральный кран.
v B + – напряжение на B + порт относительно B0 центральный кран.
v B- – напряжение на B- порт относительно B0 центральный кран.
K м – крутящий момент двигателя постоянный.
N r – количество зубьев на каждый из двух полюсов ротора. Полный размер шага параметр равен (π / 2) / N r .
R – сопротивление полуобмотки. Например, это сопротивление между A + и A0 порты.
L – индуктивность полуобмотки.Например, это индуктивность между A + и A0 порты.
R м – намагничивающий сопротивление.
B – демпфирование вращения.
J – инерция.
ω – частота вращения ротора.
Θ – угол ротора.
T d – момент фиксации амплитуда.
T e – электрический крутящий момент.
Если начальный ротор равен нулю или кратен (π / 2) / N r , ротор совмещен с Обмотка фазы А. Если положительный ток течет от порта A + к порт центрального ответвителя A0 , тогда шаговый двигатель будет оставаться на одном уровне с фаза А.Эквивалентно положительный ток, идущий от A0 центральный порт отвода к порту A- также воздействует на ротор, чтобы оставаться совмещен с фазой А.
Блок униполярного шагового двигателя создает положительный крутящий момент, действующий от механические порты C – R для любой из следующих последовательностей. Обе последовательности предполагают начальный угол ротора равен нулю или кратен (π / 2) / N r .
| Последовательность | Центральные отводы подключены к земле | Центральные отводы подключены к положительному источнику питания |
|---|---|---|
| 1 | Положительный ток от A + до A0 | Положительный ток от A0 до А- |
| 2 | Положительный ток от B + до B0 | Положительный ток от B0 до Б- |
| 3 | Положительный ток от A- до A0 | Положительный ток от A0 до А- |
| 4 | Положительный ток от B- до B0 | Положительный ток от B0 до Б- |
Режим усреднения
Если вы установите для параметра Simulation mode значение Среднее значение , как для униполярного шагового двигателя
Блок двигателя и для униполярного шагового двигателя
Блок драйвера, который им управляет, то отдельные шаги не
смоделировано.Это может быть хорошим способом ускорить моделирование. В режиме усреднения под
в условиях отсутствия проскальзывания двигатель и привод представлены вторым порядком
линейная система, которая отслеживает заданную частоту шагов. Требуемая частота шагов составляет
определяется непосредственно по напряжению на A + и А- . Так, например, напряжение + 10В на
Клеммы A + и A- интерпретируются как
скорость шага составляет десять шагов в секунду.См. Справочную страницу драйвера униполярного шагового двигателя для получения дополнительной информации.
информация о том, как подключить униполярный шаговый двигатель
Водитель к контроллеру угла шага.
Усредненный режим включает в себя устройство оценки скольжения, чтобы предсказать, будет ли шаговый двигатель проскальзывали при работе в пошаговом режиме симуляции. Скольжение прогнозируется, если двигатель крутящий момент превышает Вектор максимальных значений крутящего момента Параметр значение для более чем одного периода шага, период шага определяется из текущая потребность в скорости шага.При обнаружении проскальзывания симуляция продолжится или остановится. с ошибкой, по параметру Действие при скольжении ценить. Если вы выберете действие, позволяющее продолжить симуляцию, обратите внимание, что результаты моделирования могут быть неверными: при проскальзывании крутящий момент, создаваемый двигатель обычно не будет максимально доступным крутящим моментом; максимальный крутящий момент достигается только в том случае, если шаговый контроллер обнаруживает скольжение и регулирует скорость шага команда соответственно.
Динамика эквивалентной системы второго порядка определяется из значений которое вы указываете для Приблизительная общая инерция нагрузки и Команда максимальной скорости шага параметров. Это важно что вы устанавливаете для этих параметров как можно более точные значения, чтобы частота шагов команда отслеживается, и блок не генерирует ложных предупреждений о проскальзывании или ошибки.
Если вы запускаете двигатель в режиме усреднения с открытыми дополнительными тепловыми портами (см. Thermal Ports), затем тепло добавляется к тепловым портам, предполагая, что на обмотки всегда подается питание, даже если команда скорости шага равна нулю.Блок регулирует полушаг и пониженный крутящий момент (и токи обмотки) при более высокие скорости. Чтобы эти настройки были правильными, вектор максимального значения Значения параметра крутящего момента должны быть правильными. Для полушага, на нуле скорость тепло, выделяемое блоком, является средним по сравнению с теплом, выделяемым при остановке на полушаге и на полном шаге.
Если вы моделируете или прогнозируете скольжение, MathWorks рекомендует выполнить некоторую проверку запускает сравнение пошагового и усредненного режимов перед использованием усредненной модели Представление для симуляционных исследований.
Тепловые порты
Блок имеет пять дополнительных тепловых портов, по одному для каждой из четырех полуобмоток и одному для ротор. По умолчанию эти порты скрыты. Чтобы открыть термопорты, щелкните правой кнопкой мыши блок в вашей модели, а затем в контекстном меню выберите Simscape > Выбор блоков > Показать термопорт . Это действие отображает тепловые порты на значок блока, и выставляет температурную зависимость и Тепловой порт параметров.Эти параметры описаны ниже. эту справочную страницу.
Используйте тепловые порты для моделирования эффектов сопротивления меди и потери в железе, которые преобразуют электрическую энергию в тепло. Для дополнительной информации об использовании тепловых портов в блоках привода см. «Моделирование тепловых эффектов в поворотных и поступательных приводах».
Ссылки
[1] М. Бодсон, Дж. Н. Чиассон, Р. Т. Новотнак и Р. Б. Рековски. «Высокоэффективное управление нелинейной обратной связью Шаговый двигатель с постоянным магнитом.”IEEE Transactions по технологии систем управления, Vol. 1, No. 1, March 1993.
[2] П. П. Акарнли. Шаговые двигатели: Руководство по современной теории и практике . Новый Йорк: Peregrinus, 1982.
[3] S.E. Лышевский. Электромеханические системы, электрические машины и прикладные Мехатроника . CRC, 1999.
Подключение шагового двигателя– RepRap
Все шаговые драйверы RepRap являются биполярными (в отличие от униполярных ), поэтому, если вы используете стандартные драйверы, вам понадобится шаговый двигатель, который можно подключить как биполярный.
Для правильного подключения любого шагового двигателя нам необходимо определить, какие провода являются «парами» или подключены к концам каждой катушки. Обычно их называют катушкой «А» и катушкой «В», но это не так важно, как вы думаете.
На этом рисунке показано подключение 6-проводных шаговых двигателей:
Четырехпроводные двигатели не имеют общего провода. Мы будем использовать все четыре провода, и нам нужно только определить, какие провода составляют две пары.
Пятипроводные двигатели имеют эти два общих провода на каждой катушке, подключенные внутри и открытые как только один провод. Эта конфигурация не будет работать со стандартной электроникой RepRap. Если вы не откроете шаговый двигатель и не переприсваете его изнутри, вам понадобится другой двигатель. BrickRap использует пятипроводные двигатели 28BJY-48 с приводом от двигателя Pololu. У мотора 28BJY-48 один из проводов удален / отрезан, поищите «биполярный мотор » в Google, инструкциях, hackaday и т. Д.
Шестипроводные двигатели подключены, как показано. Мы не будем использовать два общих провода, но в остальном они идентичны четырехпроводной версии.
Восьмипроводные двигатели имеют независимый провод на каждом конце этих четырех катушек. Вы соединяете внутренние концы катушек друг с другом, чтобы получился шестипроводный двигатель, а затем игнорируете их и смотрите на четырехпроводной двигатель. Подключение сложно, см. Ниже.
Разъемы, обжим и повторная установка контактов
Обычным разъемом, используемым в шаговых двигателях, является серия JST-PH, в частности JST-PH6 (стиль JST, серия PH, 6 позиций), деталь Digikey № 455-1162-ND.Контакты для этих разъемов доступны у таких поставщиков, как DigiKey, и правильный номер детали для обычного провода 24AWG – 455-2148-1-ND, другие размеры см. В соответствующих продуктах. Для тех, у кого нет обжимного инструмента или кто не хочет хлопот, JST теперь имеет разъем IDC (Insulation Displacing Connector), который не требует использования каких-либо специализированных инструментов. Номер детали DigiKey для 6-контактного разъема, совместимого с JST-PH (номер человека 06KR-6H-P): 455-2687-ND.
Для обжима не рекомендуется делать это вручную с помощью плоскогубцев или покупать инструмент производителя за 1500 долларов, вместо этого вы можете легко использовать инструмент без храпового механизма, такой как Sargent Tools 1026CT, который стоит 30 долларов, или Waldom / GC. Электроника W-HT-1921 стоит 20 долларов от DigiKey.
Повторное закрепление штыря разъема возможно и довольно легко выполняется осторожно, согнув пластмассовый фиксатор для отдельного штифта на разъеме, при этом осторожно оттягивая провод от корпуса разъема. Не тяните за трос, пока не поднимете фиксирующий язычок, так как фиксирующая шпилька на самом штифте может зацепиться за язычок жатки, что затруднит весь процесс. Чтобы снова вставить штифт, требуется только сила, достаточная для того, чтобы стопорная шпилька прошла за язычок фиксатора и защелкнулась.
Провода
Может иметь размер 26AWG, описанный как используемый в различных двигателях Wantai, или 24AWG, упомянутый ниже и в [[1]]. Кабель Ethernet и провод 28AWG, скорее всего, не подходят для двигателей большой мощности. Вам нужен многожильный провод, а не одинарный, чтобы нити могли слегка растягиваться, чтобы избежать внезапного натяжения.
Методы и процедуры
Так как же определить, какой провод какой? Вот вам процесс.
Примечание по концевым упорам : некоторые прошивки RepRap (например, Marlin) будут искать концевые упоры для подключения во время тестирования проводки двигателя, как указано выше.В этом случае вы можете увидеть, как ваш двигатель плавно движется в одном направлении, но не в другом (поскольку он думает, что сработал конечный останов). Если ваша прошивка позволяет отключать концевые ограничители, вам следует сделать это для проверки проводки двигателя или, в качестве альтернативы, вы можете подключить двигатель к разъему шагового двигателя экструдера, чтобы убедиться, что он плавно перемещается в каждом направлении.
“пара” проводов на 4-проводных двигателях
Речь идет о поиске двух пар проводов, которые подключены к каждой из двух катушек.
- Метод с омметром
- Просто измерьте сопротивление пары проводов. Если сопротивление составляет всего несколько Ом (<100 Ом), вы нашли пару. Два других провода должны составлять вторую пару.
- Методы без омметра
- Сначала попробуйте повернуть мотор пальцами и обратите внимание, насколько это сложно. Затем склейте провода попарно. Если мотор начинает работать заметно сильнее, значит, вы нашли пару.
- Другой метод – использовать светодиод, поднести любые два провода к концам светодиода и повернуть двигатель (вращать в обоих направлениях), светодиод загорится, если провода парные, меняйте местами провода, пока не зажжете ВЕЛ.
- Метод проб и ошибок
- (Воспроизведено из этого руководства с любезного разрешения Rustle Laidman на StepperWorld.com.)
- Подключите 4 провода катушки к контроллеру любым способом. Если сначала это не сработает, вам нужно всего лишь попробовать эти 2 обмена:
| Имя | А | B | С | D |
|---|---|---|---|---|
| Произвольный первый порядок подключения | 1 | 2 | 4 | 8 |
| Концевая пара переключателя | 1 | 2 | 8 | 4 |
| Средняя пара переключателя | 1 | 8 | 2 | 4 |
- Все готово, когда двигатель плавно вращается в любом направлении.Если двигатель вращается в направлении, противоположном желаемому, поменяйте местами провода так, чтобы ABCD превратился в ABDC (поменять местами одну катушку) или DCBA (повернуть всю вилку).
- Эта процедура не всегда работает в два этапа (например, если в вашей настройке требуется, чтобы «1» совпало с «4»). Поменять местами 2-й на 4-й, затем 2-й на 3-й будет более надежным.
“пара” проводов на 6-проводных двигателях
На шестипроводных двигателях вы найдете две группы по три провода, в которых все три провода электрически соединены друг с другом.Эти провода подключены к одной катушке: один в центре катушки, два на концах. Соответственно, две из возможных пар имеют меньшее сопротивление, одна пара – большее. Возьмите пару с более высоким сопротивлением и проигнорируйте третий провод.
Здесь также может работать метод без омметра. Ожидайте не две, а три стадии разворачивающего сопротивления. Вам нужны две пары, которые дают наибольшее сопротивление повороту.
После того, как вы выяснили, какие два из шести проводов игнорировать (по одному в каждой группе), вы можете действовать, как если бы у вас были четырехпроводные двигатели.
спичечные катушки для 8-проводных шаговых двигателей
Если у вас 8-проводный шаговый двигатель, у вас будет 4 катушки. Вам необходимо определить, какие пары катушек «одинаковые». Есть две «пары», которые по сути одинаковы. Вы хотите соединить эти две пары последовательно, чтобы у вас было только две катушки, каждая в два раза длиннее. Их также необходимо соединить так, чтобы две катушки «складывались» друг с другом – полярность имеет значение.
Самый простой способ – найти техническое описание. В то время как другие типы шаговых двигателей упрощают определение правильных катушек, вероятно, будет проще и быстрее прочитать техническое описание 8-проводных двигателей.
Если вы не можете найти таблицу, еще не все потеряно. Выберите наугад две катушки, подключите их и посмотрите, работает ли. Если он поворачивается, у вас есть две катушки, которые не являются половинами одной катушки. Затем вы можете «добавлять» другие катушки по одной, пробуя разные конфигурации и полярности, пока вы не определите не только, какие две катушки какие, но и каким образом они должны быть подключены. Подумайте об этом, это просто, но несколько запутанно. Поскольку нас не волнует, в каком направлении поворачивается шаговый двигатель, мы можем исключить множество возможностей и просто задать себе простой вопрос «он поворачивается?».
Вставьте его в драйвер шагового двигателя
Чтобы шаговый двигатель просто двигался, полярность каждой катушки не имеет значения, равно как и не имеет значения, какая катушка какая. Поэтому убедитесь, что каждая пара проводов для катушки находится вместе на одной стороне вилки (или другой стороне для другой катушки), и подключите ее.
Двигатель движется в неправильном направлении
Чтобы двигатель двигался в правильном направлении, действительно имеет значение, какая катушка какая и какова полярность катушек.Однако, если они ошибаются, двигатель просто вращается не в ту сторону, это легко исправить, поменяв местами провода. Выберите один из следующего, чтобы изменить направление шагового двигателя:
- Переключение полярности любой (одной) катушки, например изменение ABCD на BACD или ABCD на ABDC.
- Замена катушек, как замена ABCD на CDAB.
- Направление шага также можно изменить в прошивке.
- Вставить вилку обратно (если вилки вашей электроники это позволяют).Это меняет местами катушки и меняет местами как катушку A, так и катушку B. Таким образом, эффект состоит в изменении направления 3 раза, что дает общий эффект, такой же, как изменение направления один раз. Лишь немногие электронные устройства позволяют это, потому что вы должны рассчитывать правильный путь не один раз, а каждый раз, когда подключаете шаговый двигатель.
Дополнительная литература
- Шаговый двигатель
- содержит список заведомо работающих шаговых двигателей, список заведомо работающих драйверов шаговых двигателей и еще несколько советов.
