Абсолютные энкодеры | ATM60 | SICK
Абсолютные энкодеры | ATM60 | SICK- Главная
- Портфолио продуктов
- Энкодеры
- Абсолютные энкодеры
- ATM60
- Главная
- Портфолио продуктов
- Энкодеры
- Абсолютные энкодеры
- ATM60
обзор семейств продукции Русский Cesky Dansk Deutsch English Español Suomi Français Italiano 日本語 – Японский 한국어 – Корейский Nederlands Polski Portugues Svenska Türkçe Traditional Chinese Китайский
Надёжный, проверенный временем и модульный
Преимущества
- Уменьшение количества вариантов благодаря одному энкодеру для всех значений разрешения; одно- и многооборотный режимы программируются произвольно
- Адаптация к разным условиям благодаря различным вариантам подключения к сети
- Энкодер, не требующий технического обслуживания, долгий срок службы
- Базовое исполнение с гибкими возможностями применения благодаря сменным зажимным цангам для моделей со слепым полым валом
- Быстрый ввод в эксплуатацию благодаря функции установки нулевой точки / предварительной настройки нажатием кнопки на устройстве или через программное обеспечение
- Безопасность работы благодаря высоким допустимым значениям по ударопрочности и виброустойчивости
- Доступность и сервис по всему миру
Обзор
Надёжный, проверенный временем и модульный
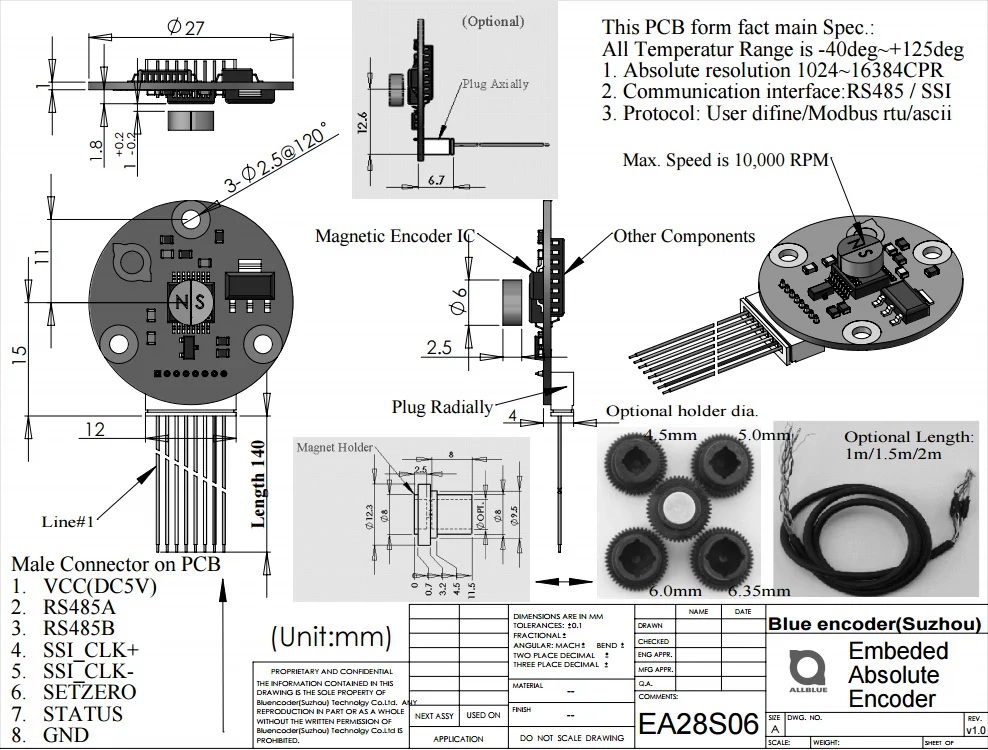
Абсолютный многооборотный энкодер ATM60 от SICK надёжно передаёт информацию о положении с разрешением до 26 бит даже в суровых условиях окружающей среды. Эта испытанная в практических условиях серия работает по магнитной технологии измерений. Позиция в пределах одного оборота определяется с разрешением 13 бит системой, сканирующей положение набора элементов- постоянных магнитов. Число оборотов подсчитывается с разрешением 13 бит благодаря системе понижающего редуктора. Энкодер оснащён кнопкой установки нулевой точки, которая позволяет установить устройство на нуль или на другое запрограммированное заказчиком значение прямо на месте. Благодаря магнитной технологии измерения, прочному корпусу со степенью защиты IP67, высокой ударопрочности и виброустойчивости ATM60 чрезвычайно прекрасно подходит для применения в самых неблагоприятных условиях.
Эта испытанная в практических условиях серия работает по магнитной технологии измерений. Позиция в пределах одного оборота определяется с разрешением 13 бит системой, сканирующей положение набора элементов- постоянных магнитов. Число оборотов подсчитывается с разрешением 13 бит благодаря системе понижающего редуктора. Энкодер оснащён кнопкой установки нулевой точки, которая позволяет установить устройство на нуль или на другое запрограммированное заказчиком значение прямо на месте. Благодаря магнитной технологии измерения, прочному корпусу со степенью защиты IP67, высокой ударопрочности и виброустойчивости ATM60 чрезвычайно прекрасно подходит для применения в самых неблагоприятных условиях.
Краткий обзор
- Исключительно надёжный абсолютный многооборотный энкодер с разрешением до 26 бит
- Сплошной вал с зажимным или сервофланцем, слепой полый вал, принадлежности для адаптации под конкретное применение
- Функция установки нулевой точки и предварительной настройки через аппаратное/программное обеспечение
- Коммуникационный интерфейс: SSI, DeviceNet, PROFIBUS DP или CANopen
- С возможностью электронной юстировки, разрешение параметрируется
- Магнитная технология измерения
Применение
Технические данные
Обзор технических данных
Обзор технических данных
Исполнение энкодера Многооборотный Тип вала Сплошной вал, Сервофланец
Сплошной вал, Торцевой фланец
Глухой полый вал
Диаметр вала Сплошной вал, Сервофланец 6 mm Сплошной вал, Торцевой фланец 10 mm Глухой полый вал 15 mm 1) Вид подключения Разъем, M23, 12-контактный, радиальная
Кабель, 12 жил, радиальная
Адаптер шины для CANopen
Адаптер шины для PROFIBUS
Адаптер шины для DeviceNet
Интерфейс связи SSI
CANopen
PROFIBUS DP
DeviceNet™
Количество шагов на один оборот (макс.  разрешение)
разрешение)SSI, программируемый 8.192 (13 bit) 4.096 (12 bit) 2.048 (11 bit) Разрешение макс. (имальное количество шагов на один оборот x имальное количество оборотов) CANopen, программируемый 13 bit x 13 bit (8.192 x 8.192) PROFIBUS DP, DPV0, программируемый 13 bit x 13 bit (8.192 x 8.192) DeviceNet™, программируемый 13 bit x 13 bit (8.192 x 8.192) Программируемый/параметрируемый С помощью портативного устройства программирования
С помощью инструментальных средств ПЛК
- 1) Втулки-вкладыши на 6, 8, 10, 12 и 14 мм, а также 1/4″, 3/8″ и 1/2″ заказываются отдельно как аксессуар. Для диаметра вала 15 мм втулка-вкладыш не требуется.
Подробные технические характеристики вы можете найти на странице соответствующего устройства
Загрузки
Пожалуйста, подождите. ..
..
Ваш запрос обрабатывается, это может занять несколько секунд.
Загрузка …
Энкодеры. Виды и работа. Особенности и применение
Коротко энкодеры можно назвать преобразователями угловых перемещений. Они служат для модификации угла поворота объекта вращения, например, вала какого-либо механизма, в сигнал электрического тока. При этом определяется не только угол поворота вала, но и его направление вращения, а также скорость вращения и текущая позиция относительно первоначального положения.
Наиболее популярными энкодеры стали при их использовании в системах точного перемещения, на станкостроительных заводах, в производственных комплексах с применением робототехники, в измерительных устройствах, в которых необходима регистрация точных измерений наклонов, поворотов, вращений и углов.
Энкодеры – это датчики поворота. Простейший датчик имеет ручку, которая может поворачиваться по часовой стрелке или против нее. В зависимости от угла поворота и направления выдается цифровой сигнал, информирующий о том, в каком положении находится ручка, либо в какую сторону она была повернута.
У такого энкодера, показанного на рисунке, ручка также может применяться в качестве кнопки. Это является вспомогательной функцией конкретного вида энкодера.
По типу выдаваемых данных энкодеры делятся на две большие группы:
- Абсолютные.
- Инкрементальные.
У абсолютного энкодера весь круг поворота разделен на определенное количество секторов, чаще всего одинакового размера. Эти сектора пронумерованы. Энкодер при работе выдает номер сектора, в котором на данный момент он находится. Поэтому он и называется абсолютным. У этого типа энкодера всегда можно определить, на какой угол относительно нулевого сектора повернут энкодер в конкретный момент, то есть, при повороте он выдает значения номеров секторов, до максимального значения. Далее он переходит снова на ноль.
Если вал энкодера поворачивать в другую сторону, то он начнет выдавать противоположные значения. В нашем случае у него используется пять выводов для выдачи значений поворота.
У данного алгоритма имеются свои недостатки. Из таблицы 1 виден порядок выдаваемых значений n-го энкодера. Стоит обратить внимание на две последние строчки, переход от 127 на 128.
Таблица 1
Здесь меняются абсолютно все биты. В идеальном энкодере они все меняются одновременно и нет никаких проблем. Практически в реальном энкодере биты меняются быстро, однако не одновременно. И в какой-то момент на выходе энкодера оказывается совершенно произвольное значение. Так как меняются все биты, следовательно, у энкодера будет произвольное значение от нуля до всех единиц.
Справа изображен пример такого переключения. Чем это может грозить? Разберем пример. Микроконтроллер с помощью двигателя управляет валом и поворачивает его на определенный угол. В определенный момент при переключении со 127 на 128 ячейку он получает определенное случайное значение. Контроллер делает вывод, что вал находится совершенно в другом месте, в отличие от фактического места, и начинает его вращать в другую сторону, с другой скоростью и т. д.
д.
Через определенное время микроконтроллер получает правильное значение, начинает пытаться остановить вал и вращать его в правильную сторону. Такой процесс может продолжаться долго, при условии, что такая ошибка будет встречаться часто. Такие ошибки являются нерегулярными, и вычислить их достаточно сложно.
Код ГреяВыше описанная проблема решается с помощью введения кода Грея. Особенностью кода Грея является то, что при переключении энкодера на единицу, значение кода Грея меняется также на единицу. Меняется только один вид. Это видно в таблице 2 в сравнении двоичного кода и кода Грея.
Таблица 2
Первые две строчки совпадают, но уже во второй строчке поменялся средний бит. Далее также меняется один бит. Также стоит отметить, что последний и первый код Грея отличается на один бит, то есть код Грея может зациклиться.
Преимуществом данного кода является то, что ошибка, которая рассмотрена выше, невозможна. Из недостатков можно отметить, что микроконтроллеру необходимо переводить код Грея в двоичный код для того, чтобы понять, в каком положении находится абсолютный энкодер.
Следующим типом является инкрементальный энкодер, который имеет более простую структуру. Но при этом он не показывает конкретное место положения своей ручки. Он показывает только направление поворота, а число делений поворота должен считать микроконтроллер.
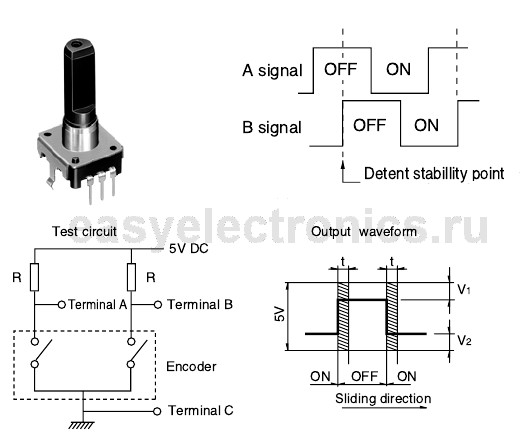
У инкрементального энкодера есть набор полосок, которые по умолчанию подключены к земле, и при повороте они замыкаются и размыкаются. Получается сигнал, изображенный на рисунке (похож на меандр). Таких круговых полосок у энкодера две. Полоски смещены на одну четверть, и сигналы также смещены между собой на четверть. Это важно, так как позволяет определить направление вращения.
Схему инкрементального энкодера можно представить по правому рисунку. Кнопки обозначают периодические подключения энкодера к земле. Так как внутри энкодер не подключается к логической единице, то необходимо снаружи самостоятельно подтянуть логические единицы через резисторы к выводу энкодера. В этом случае, когда ни одна из ножек у энкодера не подключена к земле, на ножках будет логическая единица.
В этом случае, когда ни одна из ножек у энкодера не подключена к земле, на ножках будет логическая единица.
Если энкодер подключил к земле какую-то ножку, то на этой ножке будет логический ноль. В спокойном состоянии у энкодера на выходе логическая единица. При начале вращения энкодера в любую сторону, то сначала один вывод подключается к земле, затем другой. Далее эти выводы по очереди отключаются от земли, и на них опять образуется логическая единица.
Определить направление поворота можно по тому, какой из выводов раньше подключился к земле. При подсчете полных циклов можно посчитать количество щелчков поворота энкодера.
Фактически у энкодера имеется четыре состояния:
- Две единицы.
- Ноль и единица.
- Ноль и ноль.
- Единица и ноль.
Три состояния, которые не равны единицам, являются неустойчивыми, и в них энкодер не может находиться. Во многих микроконтроллерах реализована функция подсчета поворотов с помощью таймеров, у которых есть определенные входы. Таймер считает на аппаратном уровне, на сколько щелчков и в какую сторону был повернут энкодер, и выдает значение. То есть, счетчик инкрементирует какое-либо число.
Таймер считает на аппаратном уровне, на сколько щелчков и в какую сторону был повернут энкодер, и выдает значение. То есть, счетчик инкрементирует какое-либо число.
По изменению этого числа можно определить, на сколько щелчков был повернут энкодер. По количеству щелчков можно определить и угол поворота. Энкодер также имеет дребезг контактов, который усложняет анализ сигналов.
Оптические энкодерыПодобный преобразователь выполнен в виде диска, зафиксированного на валу, и изготовленного из стекла. Оптический датчик поворота отличается от других видов дополнительным оптическим растором, перемещаемым при повороте вала. При этом он превращает момент вращения в световой поток, который далее принимается фотодатчиком.
Оптический преобразователь запоминает углы вращения. При этом каждому отдельному положению соответствует особый цифровой код, который вместе с числом оборотов образует единицу измерения датчика. Энкодер подключается и работает по аналогии с инкрементальным датчиком.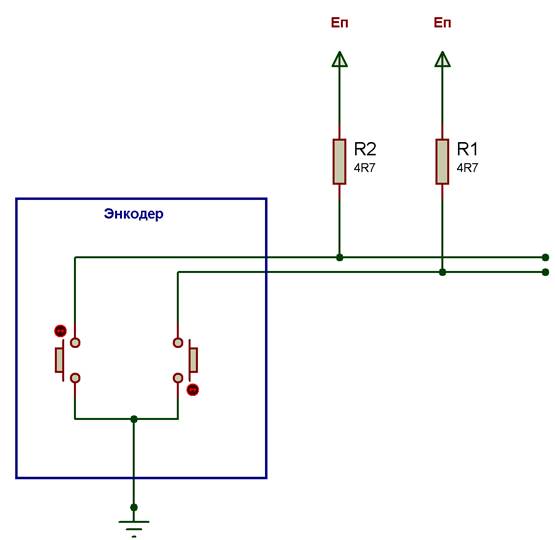
По характеру функционирования они разделяются на фотоэлектрические и магнитные. Принцип работы магнитных основан на использовании эффекта Холла, который был впервые открыт в 1879 году. При этом разность потенциалов появляется только при расположении провода постоянного тока в магнитное поле.
По точности и свойствам разрешения магнитный вид датчика уступает фотоэлектрическому, однако по конструкции он проще, менее требователен к условиям работы и пространству. Магнитный энкодер является прибором, который фиксирует прохождение магнитного полюса магнита при вращении, находящегося рядом с чувствительным элементом. Информация передатчика выражается в цифровом коде.
Фотоэлектрический энкодер является датчиком, работающим на основе фотоэлектрического принципа. Этот эффект наблюдается при воздействии светового потока на вещество. Этот принцип был открыт в 1887 году. При эксплуатации такого датчика происходит постоянное преобразование луча света в сигнал электрического тока.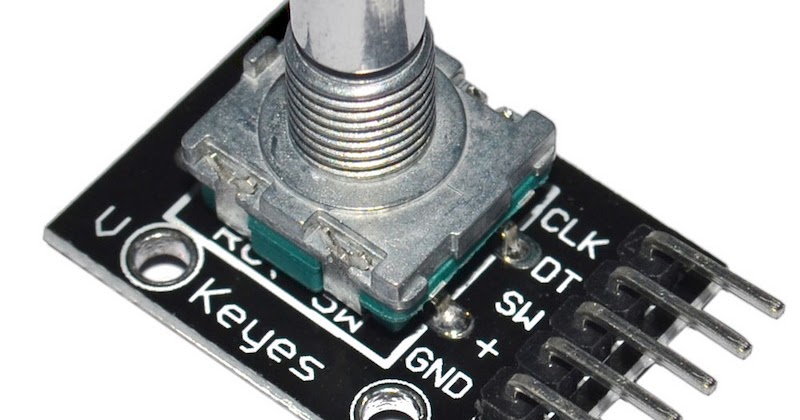
Аналогами фотоэлектрического энкодера являются оптоэлектронный, оптический и оптронный. Эти датчики наиболее чувствительны к характеристикам изготовления, эксплуатации и другим факторам, по сравнению с другими моделями. Однако это оправдывается их повышенной точностью, в отличие от конкурентов.
Похожие темы:
- Потенциометры. Виды и устройство. Работа и особенности
- Реостаты. Виды и устройство. Работа и особенности
- Автотрансформаторы (ЛАТР). Типы и работа. Применение
- Сервоприводы. Виды и устройство. Характеристики и применение
Как использовать кнопочный поворотный энкодер
» Перейти к дополнительным материалам
Несколько лет назад я увлекся микроконтроллерной ошибкой, и мне нравилось создавать различные гаджеты, которые их используют. Одним из утомительных аспектов создания гаджетов являются кнопки и переключатели, составляющие элементы управления вводом. Когда я открыл для себя кнопочный поворотный энкодер, я понял, что один элемент управления может заменить многие, упростив дизайн, конструкцию и программирование.
Эта статья познакомит вас с поворотными энкодерами через Greyhill 62P22-L4 1 . Я опишу, что это такое, как это работает и как интегрировать его в свой проект. Демонстрация будет представлена с использованием PIC16F84A 2 вместе с кодом проекта, написанным на C. (Хотя 62P22 в настоящее время снят с производства, аналогичные заменители можно найти, включая панельную версию 62AG22-L5-P).
The Greyhill 62P22-L4
Я выбрал это устройство более или менее случайно, потому что оно было в наличии у моего любимого поставщика.
РИСУНОК 1. Энкодер.
Вал вращается с мягкими фиксаторами и может быть нажат как кнопка. Каждый фиксатор находится под углом 22º вращения. Нет упоров и нет причин, по которым его нельзя бесконечно вращать ни по часовой, ни против часовой стрелки. Эта модель поставляется с двумя разными крутящими моментами и двумя разными усилиями нажатия кнопки; модель L4 представляет собой модель с меньшим крутящим моментом и меньшим усилием.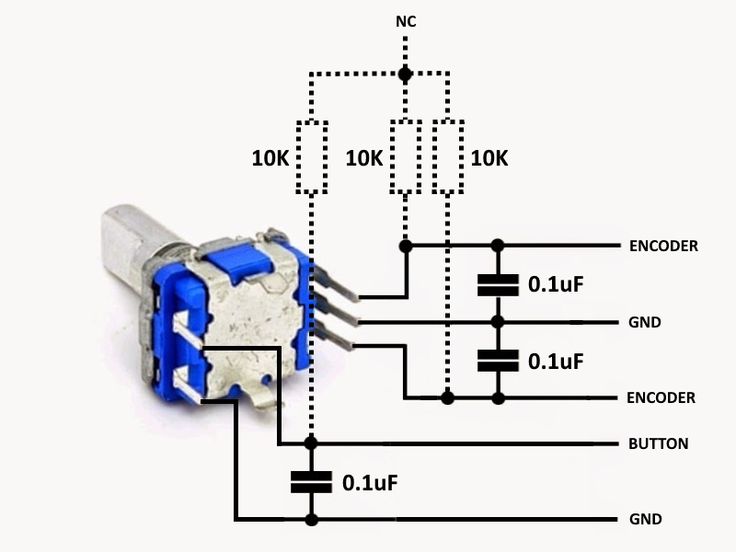
Для этого энкодера требуется питание +5 В постоянного тока при 30 мА. Он использует внутренний светодиод и оптический детектор для получения выходного сигнала. Кнопка представляет собой механический контакт, и для устранения дребезга требуется несколько миллисекунд (четыре при замыкании и 10 при размыкании 3 ).
Энкодер выводит двухбитный двоичный код на свои контакты Output A и Output B. Это дает четыре уникальных значения, после которых код повторяется. Зная предыдущее и текущее выходные значения и кодовую последовательность, вы можете определить, в какую сторону вращался вал.
Если предположить, что выход A является младшим битом, а выход B — старшим битом, при вращении по часовой стрелке энкодер выводит 0, 1, 3, 2. При вращении против часовой стрелки выводятся 0, 2, 3 , 1. (Конечно, нет никаких причин, по которым порядок битов нельзя было бы изменить на противоположный и выходная последовательность соответственно изменилась.
РИСУНОК 2. Логические состояния кодера.
Чтобы получить число в показанной последовательности, поместите Выходы A и B в байт в рабочей памяти следующим образом:
| бит 7 | бит 0 | ||||||
| 0 | 0 | 0 | 0 | 0 | 0 | Б | А |
При запуске программа должна прочитать значение энкодера, так как она может вывести любое из его четырех значений. Значение сохраняется в памяти как предыдущее значение. Затем энкодер опрашивается до тех пор, пока значение не изменится. Сравнивая предыдущее значение и текущее значение с последовательностью 0, 1, 3, 2, вы можете сказать, в какую сторону вращался вал, и действовать соответственно. Затем текущее значение сохраняется как предыдущее, и опрос продолжается.
Обратите внимание, что для выходов энкодера требуются подтягивающие резисторы. В моем демонстрационном примере я использую внутренние подтяжки, доступные на порте B PIC16F84A для энкодера и кнопки. В противном случае рекомендуется использовать резисторы номиналом 10 кОм для питания +5 В.
Кнопка устраняется дребезгом и читается как любая кнопка. Согласно спецификациям, максимальное время установления составляет 10 миллисекунд, что довольно быстро, поэтому ваш код может реагировать на нажатия кнопок.
Наконец, для контакта питания энкодера требуется резистор 150 Ом между ним и источником питания +5 В. Распиновка энкодера показана на Таблица 1 .
| Штифт | Описание |
| 1 | Питание (+5 В постоянного тока через резистор 150 Ом) |
| 2 | Земля |
| 3 | Выход Б |
| 4 | Выход А |
| 5 | Кнопка |
| 6 | Кнопка |
ТАБЛИЦА 1.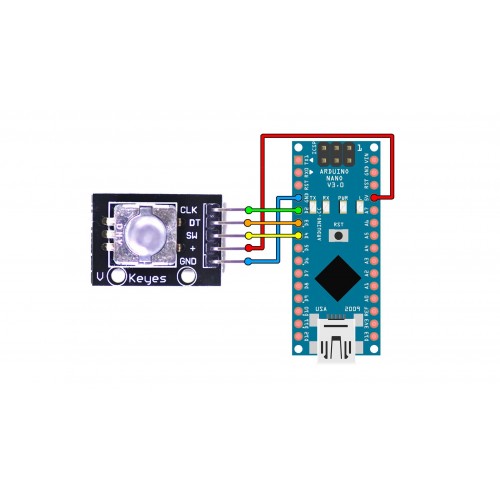
РИСУНОК 3. Номера контактов, вид сверху.
Что с ним делать?
Очевидное использование энкодера состоит в том, что вращение по часовой стрелке сигнализирует о событии типа «вверх», вращение против часовой стрелки — «вниз», а кнопка — о каком-либо запросе или выборе режима. Например, допустим, вы разрабатываете программируемый термостат с ЖК-дисплеем. Вы хотите, чтобы он управлял либо печью, либо кондиционером, поэтому он имеет три состояния: прохладно, тепло и выключено. Вы можете использовать кнопки вверх и вниз для температуры и трехпозиционный переключатель для состояния. Или вы можете использовать энкодер. Вращение вала повышает или понижает заданную температуру. Нажатие кнопки меняет режим, активируя меню, которое позволяет выбрать нагрев, охлаждение или выключение (поворотом вала). Повторное нажатие кнопки возвращает устройство в рабочий режим.
Это очень простой термостат, но теперь его конструкцию легко расширить, добавив дополнительные функции, используя гибкость энкодера и ЖК-дисплея. Вы можете добавить часы и программы времени суток; можно настроить часы; можно добавить функцию включения/выключения вентилятора; и так далее, без необходимости добавлять дополнительное оборудование к вашему проекту.
Вы можете добавить часы и программы времени суток; можно настроить часы; можно добавить функцию включения/выключения вентилятора; и так далее, без необходимости добавлять дополнительное оборудование к вашему проекту.
Другим приложением является контроллер мощности, возможно, для управления температурой паяльника. Функция широтно-импульсной модуляции многих микроконтроллеров идеально подходит для управления мощностью резистивной нагрузки с помощью мощного полевого МОП-транзистора. Устройство может иметь одно- или двухразрядный светодиодный дисплей, показывающий уровень мощности, и поворотный энкодер для увеличения или уменьшения нагрева. Кнопку энкодера можно использовать в качестве выключателя. (На самом деле питание микроконтроллера всегда будет подаваться, но при выключении устройства процессор будет устанавливать нулевой уровень выходной мощности и отключать светодиодный дисплей.)
Если вы добавите аппаратное устранение дребезга к кнопке и подключите ее к выводу внешнего прерывания, нажатие кнопки может использоваться для перевода микроконтроллера в спящий режим, а прерывание, вызванное другим нажатием, используется для его пробуждения. Приложения, работающие от батареи, выиграют от снижения энергопотребления, когда устройство выключено.
Приложения, работающие от батареи, выиграют от снижения энергопотребления, когда устройство выключено.
Демонстрационный проект
В этом простом проекте используется PIC16F84A для управления поворотным энкодером в качестве входа и одноразрядным светодиодным дисплеем и зуммером в качестве выхода. При включении отображается «0». Поверните энкодер по часовой стрелке, и число увеличится до 9., а затем снова вернуться к нулю. Поверните против часовой стрелки, и на дисплее появится цифра «9», а затем уменьшится до 0. При нажатии кнопки энкодера звучит зуммер.
Энкодер S1 соединен с U1 тремя контактами ввода-вывода, сконфигурированными как входы. Внутренние подтягивающие резисторы порта B используются для каждого входного порта PORTB, поэтому внешние подтягивающие резисторы не нужны. PIC использует кварцевый генератор с частотой 3,58 МГц, но подойдет любой кварцевый генератор до максимальной частоты, поддерживаемой PIC, если параметры интервала timer0 настроены соответствующим образом.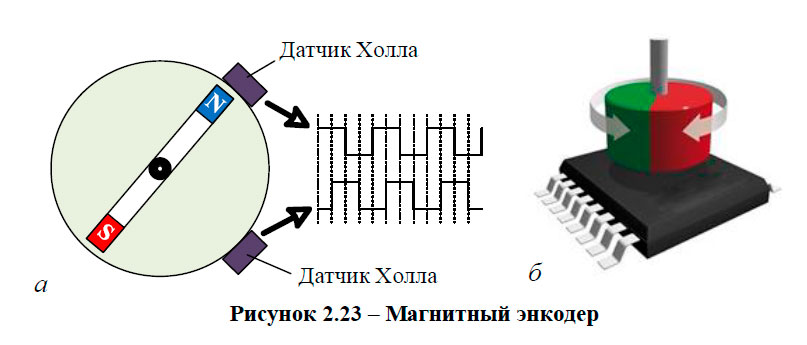 J1 используется для внутрисхемного программирования Flash (я использую Pickit2 9).0010 4 ) и не требуется для работы. Зуммер и светодиодный дисплей подключены к остальным контактам ввода-вывода, сконфигурированным как выходы. (Если вы не хотите заморачиваться с зуммером, просто замените его светодиодом и ограничительным резистором на 470 Ом.) U2 обеспечивает регулируемое напряжение в пять вольт, так что для питания проекта можно использовать батарею или настенную розетку.
J1 используется для внутрисхемного программирования Flash (я использую Pickit2 9).0010 4 ) и не требуется для работы. Зуммер и светодиодный дисплей подключены к остальным контактам ввода-вывода, сконфигурированным как выходы. (Если вы не хотите заморачиваться с зуммером, просто замените его светодиодом и ограничительным резистором на 470 Ом.) U2 обеспечивает регулируемое напряжение в пять вольт, так что для питания проекта можно использовать батарею или настенную розетку.
РИСУНОК 4. Схема демонстрационного проекта .
ПРОЕКТ ТОП.
ПРОЕКТ ДНО.
Программное обеспечение
Аппаратная часть проектов микроконтроллеров обманчиво проста, потому что большая часть работы выполняется в программном обеспечении. Опрос входных событий является важной задачей, которую необходимо тщательно координировать с другой работой, выполняемой процессором. Неправильный или плохой дизайн может привести к тому, что входные события будут пропущены или ответ на них будет вялым. Способ, которым я решаю эту проблему, заключается в использовании таймера PIC для выполнения всех входных опросов и устранения дребезга переключателей. Затем он отправляет флаги событий в код переднего плана, который может свободно реагировать на события по мере их возникновения.
Способ, которым я решаю эту проблему, заключается в использовании таймера PIC для выполнения всех входных опросов и устранения дребезга переключателей. Затем он отправляет флаги событий в код переднего плана, который может свободно реагировать на события по мере их возникновения.
Эта архитектура хорошо работает, когда событие сигнализирует о действии, которое можно быстро обработать. Я делаю это для своих входов энкодера, где я увеличиваю или уменьшаю отображение. С другими типами событий, для выполнения которых требуется время, может быть сложнее справиться. Для моего нажатия кнопки я хочу, чтобы зуммер звучал в течение определенного периода времени, но я не хочу завязывать основной код с большой задержкой. В этом случае решение состоит в том, чтобы включить зуммер в ответ на нажатие кнопки, а затем запланировать событие, чтобы выключить зуммер позже (удобно сделать в нашей процедуре прерывания таймера). Преимущество заключается в том, что в программе вообще нет ненужных циклов задержки.
Чтобы увидеть, как поворотный энкодер управляется в программном обеспечении, просмотрите encoder_demo.c и encoder_demo.h в загружаемых файлах, доступных в конце этой статьи.
1) В функции InitCPU регистр опций загружается для назначения предварительного делителя на timer0 и установки предварительного делителя на 16:1. Счетчик timer0 TMR0 инициализируется значением в определении TIMER0_INIT. Также обратите внимание, что подтяжки PORTB включены. Затем включаются timer0 и глобальные прерывания.
2) Функция обработки прерываний isr (PICC) или прерывание (BoostC) предназначено для обработки прерываний timer0. Выбор значения инициализации предварительного делителя и счетчика timer0, наряду с частотой кристалла, определяет интервал прерывания, выбранный равным четырем миллисекундам (но не особенно критично для данного приложения). Комментарии в коде дополнительно поясняют, как были получены эти значения.
Основное действие заключается в вызове debounce_switch функции, которая опрашивает каждый входной контакт и выполняет устранение дребезга на входе.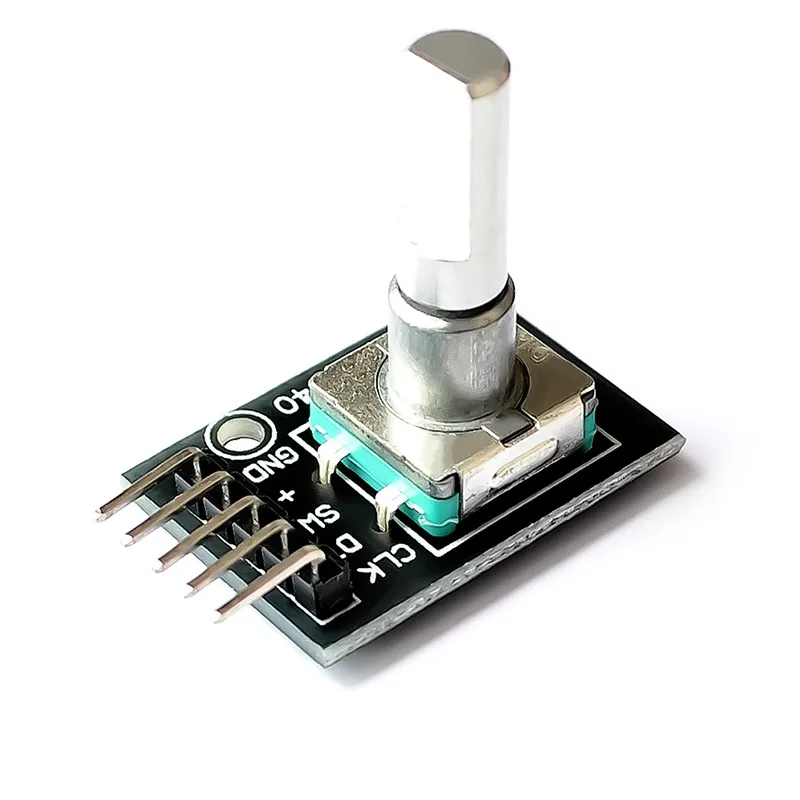 Параметры отсутствуют, так как глобальные переменные в памяти используются для управления состояниями устранения дребезга. Если какой-либо входной уровень изменяется, для основного кода устанавливается флаг события.
Параметры отсутствуют, так как глобальные переменные в памяти используются для управления состояниями устранения дребезга. Если какой-либо входной уровень изменяется, для основного кода устанавливается флаг события.
Второстепенным действием является поиск включенного звукового сигнала, обратный отсчет до нуля и выключение звукового сигнала.
3) Функция debounce_switch опрашивает каждый вход (два энкодера и одна кнопка) и отслеживает состояние, возвращая текущее состояние в глобальную переменную ucDebouncedState .
4) Функция analysis_switch вызывается основным кодом в ответ на событие изменения ввода. Эта функция определяет, была ли нажата кнопка или повернут ли вал энкодера по часовой или против часовой стрелки. Соответствующий бит события включается для обработки основной линией.
Для кодировщика используемый метод заключается в том, чтобы изолировать Выход A и Выход B как два младших бита в байте, как описано выше, и посмотреть, как это сравнивается с предыдущим значением.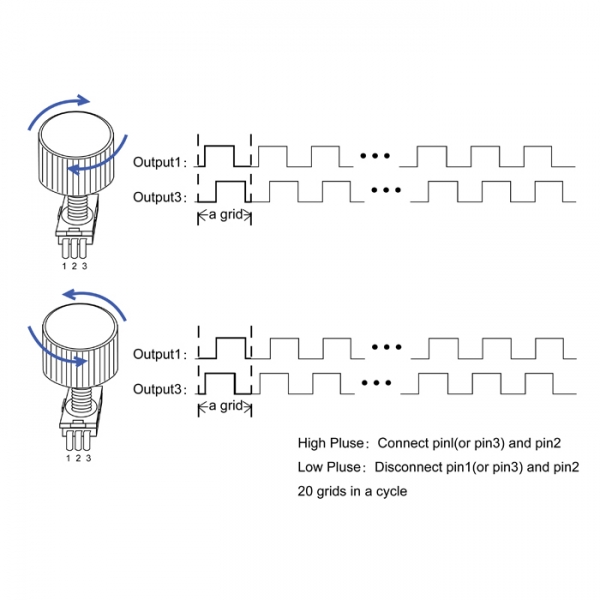
Распознаются нажатия кнопок, но не отпускания кнопок. При необходимости можно было добавить событие для отпускания кнопки или глобальную переменную, установленную в 1, когда кнопка была нажата.
5) Основная функция ищет различные флаги событий и выполняет необходимую обработку.
Вывод
Надеюсь, поворотный энкодер показался вам таким же интересным, как и мне. Легче разработать проект, чтобы использовать одно устройство вместо нескольких других устройств ввода. Кроме того, проще построить проект с одним устройством ввода вместо множества, и пользователю может быть проще работать с проектом. NV
СПИСОК ЛИТЕРАТУРЫ
1 LGRWS01.GRAYHILL.COM/WEB1/images/productimages/opt_encoder_62p.pdf
2 P.PDF./WEPEMPER.SMOCEMPER./WEPEMPER./WEPEMP. /35007b.pdf
3 www.ganssle.com/debouncing.pdf
4 www. microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=1406&dDocName=en023805&redirects=pickit2
microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=1406&dDocName=en023805&redirects=pickit2
Downloads
0808_Botner_encoder -demo-code.zip
Что в почтовом индексе?
Кнопочный поворотный энкодер Демонстрационный код
Поворотный энкодер — COM-09117 — SparkFun Electronics
Этот продукт имеет ограничения на доставку, поэтому варианты доставки могут быть ограничены или не могут быть отправлены в следующие страны:
Избранное Любимый 29
Список желаний
В наличии COM-09117 RoHS
5
В наличии 250+ шт. в наличии.
4,50 4,28 4,05 | 1+ шт. 25+ шт. 100+ шт. |
- Описание
- Документы
Это 12-шаговый поворотный энкодер с приятным ощущением щелчка. Он удобен для макета и имеет довольно удобный переключатель выбора (нажав на ручку). Энкодер отличается от потенциометра тем, что энкодер имеет полный оборот без ограничений. Устройство выводит код Грея, чтобы вы могли определить, насколько и в каком направлении был повернут энкодер.
Этот блок не поставляется с ручкой, но рабочая ручка описана ниже.
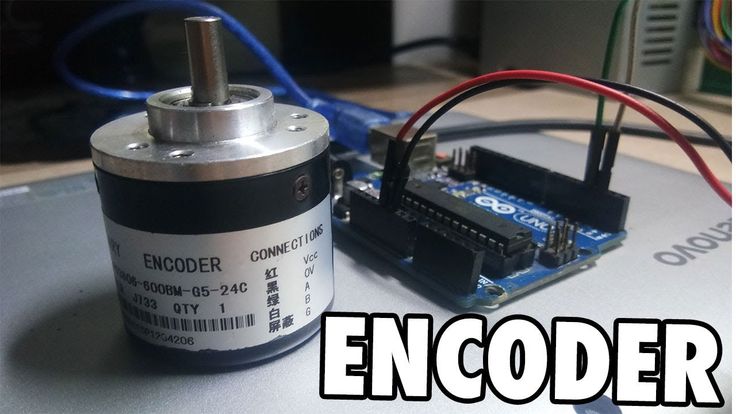
- Пример изображения, показывающий, как использовать энкодер в Arduino Учебное пособие по поворотному энкодеру
- и проект Arduino
- Пример проекта Arduino
- Пример таймера приготовления
- Лист данных
Rotary Encoder Справка и ресурсы по продукту
- Необходимые навыки
Основной навык:
Пайка Этот навык определяет сложность пайки конкретного изделия.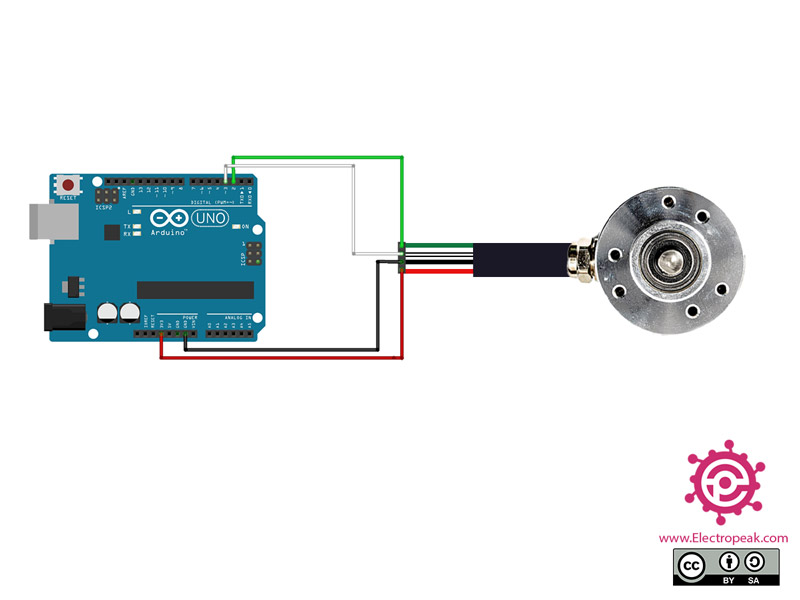 Это может быть пара простых паяных соединений или потребуются специальные инструменты для оплавления.
Это может быть пара простых паяных соединений или потребуются специальные инструменты для оплавления.
1 Пайка
Уровень навыка: Нуб – Требуется некоторая базовая пайка, но она ограничена всего несколькими контактами, базовой пайкой через отверстие и парой (если есть) поляризованных компонентов. Обычный паяльник — это все, что вам нужно.
Просмотреть все уровни навыков
- Комментарии 77
- Отзывы 5 5
4.4 из 5
На основании 5 оценок:
Сейчас просматриваются все отзывы покупателей.
Отображение результатов со звездным рейтингом.
1 из 1 нашел это полезным:
Делает работу
АВНТ БРД проверенный покупатель
Я получил это как поворотный энкодер общего назначения, чтобы положить его в мою коробку для прототипирования. Связанные учебные пособия упрощают быстрое начало работы. Если вы хотите иметь возможность добавлять/удалять это на макетной плате, я бы порекомендовал сделать для нее собственную разделительную доску, так как контакты мягкие и довольно легко ломаются. Если вы собираетесь просто монтировать его на панель, то все должно быть хорошо. Я бы взял / использовал ручку с этим, так как фактический вал довольно маленький, что затрудняет его захват, чем те потенциометры, которые вы получаете для хобби-электроники.
1 из 1 нашел это полезным:
Трудно монтируется на панель
автор: tdeagan проверенный покупатель
Кодер показан, и примеры облегчают работу с ним. Однако будьте внимательны, этот конкретный энкодер не имеет резьбового вала. Он предназначен для монтажа на печатной плате (а затем стойки на печатной плате крепятся к панели). Подобные устройства в других местах имеют резьбовой вал, поэтому обязательно выберите тот, который соответствует вашим потребностям. Версия этого энкодера с подсветкой здесь, в Sparkfun, имеет резьбовой вал.
1 из 1 нашел это полезным:
Отлично работает, но запутанный пример кода
по ротору проверенный покупатель
Дешевая и надежная фурнитура. Но я нашел код примера довольно запутанным. Для более понятного кода я рекомендую посмотреть эту веб-страницу: http://r429724.website.cvfbrtr16.service.one/rotary_encoder
Но я нашел код примера довольно запутанным. Для более понятного кода я рекомендую посмотреть эту веб-страницу: http://r429724.website.cvfbrtr16.service.one/rotary_encoder
1 из 1 нашел это полезным:
Могло быть лучше
от участника № 466963 проверенный покупатель
Определенно не так удобно для макетной платы, как вы думаете. Несмотря на то, что расстояние правильное, контакты намного шире, чем стандартные контакты или провода ИС. Практически невозможно разместить на макетной плате. Я попробовал кучу. В тот, в который я мог вставить штифты, он не будет надежно закреплен, потому что штифты слишком короткие.
Я закончил тем, что припаял деталь к макетной плате с небольшим сквозным отверстием и добавил несколько выводов.