
Схема драйвера униполярного шагового двигателя, описанная в данной статье, реализует следующие задачи:
• управление 4-фазовым униполярным шаговым двигателем.
• обеспечивает плавную регулировку скорости вращения и изменение направления вращения.
• выполняет функцию остановки двигателя.
Ниже представлена принципиальная схема драйвера шагового двигателя. Драйвер построен с использованием трех микросхем 4000 серии и четырех силовых MOSFET транзисторов.
Схема тактируется генератором прямоугольных импульсов, построенного на логических элементах 2И-НЕ с триггером Шмитта на выходе. Рабочая частота генератора определяется общим сопротивлением PR1 + R2 и емкостью конденсатора С1, и может быть изменена в широком диапазоне с помощью потенциометра PR1.
Фрагмент схемы на элементах EXOR и J-K триггере создает счетчик по модулю 4, с тактами высокого уровня. Переключатель SB1 (JP1) предназначен для изменения направления работы счетчика, а, следовательно, для изменения направления вращения шагового двигателя. С помощью переключателя SB2 (JP2) можно запускать и останавливать двигатель.
Управление катушками 4-фазного шагового двигателя осуществляется с помощью четырех MOSFET транзисторов (VT1…VT4). Использование в данной схеме транзисторов высокой мощности типа BUZ11 — это решение, гарантирующее надлежащую работу двигателя высокой мощности.
Ниже показаны формы сигналов на разъеме Х2, к которому подключаются обмотки шагового двигателя.
Драйвер собран на печатной плате, рисунок которой приведен ниже. Монтаж следует начать с установки резисторов, панельки под микросхемы и закончить разъемами и силовыми транзисторами.
Разъемы JP1 и JP2 имеют ту же функцию, что и нажатие кнопки SB1 и SB2, так что вы можете подключить к ним кнопки и вынести их за пределы платы.
Печатная плата разработана таким образом, что вы можете установить транзисторы на общий радиатор, предварительно изолировав их слюдяными или силиконовыми прокладками.
После сборки необходимо тщательно проверить плату на предмет короткого замыкания дорожек. Драйвер, собранный из исправных деталей не требует настройки и начинает работать сразу.
Следует, упомянуть о способе подключения питания и обмоток двигателя к плате драйвера. В случае питания схемы управления и двигателя тем же напряжением, которое находится в диапазоне от 5…15 В, и ток потребления не превышает 1 А, то необходимо установить перемычку JP3 и питание подать к разъему VDD.
Если параметры питания шагового двигателя не находится в пределах напряжения питания схемы драйвера, то необходимо снять перемычку JP3, и к разъему VDD подвести напряжение питания от 5…15 В, а к разъему X2 подать питание в соответствии с параметрами шагового двигателя.
Рисунок печатной платы (8,5 KiB, скачано: 1 715)
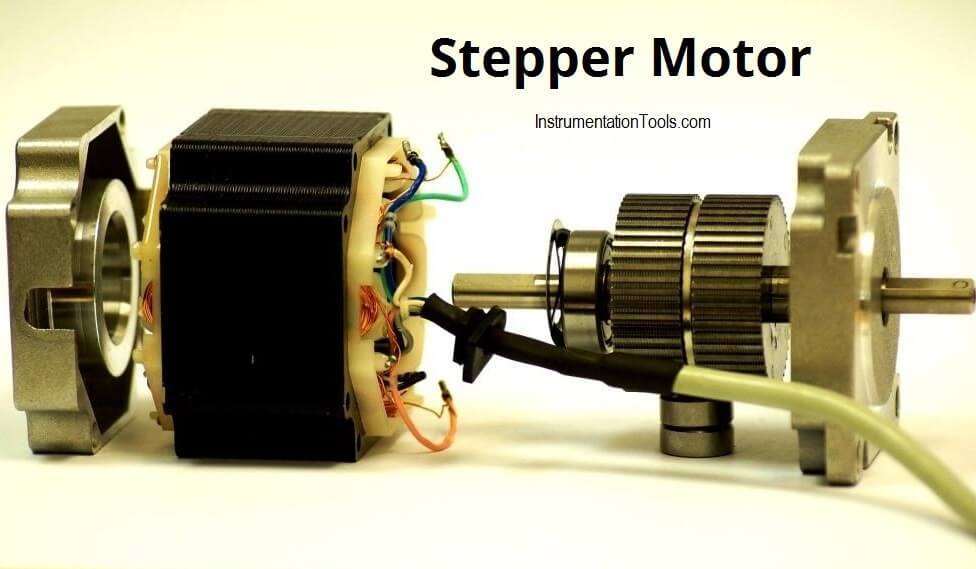
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Что такое шаговый двигатель?
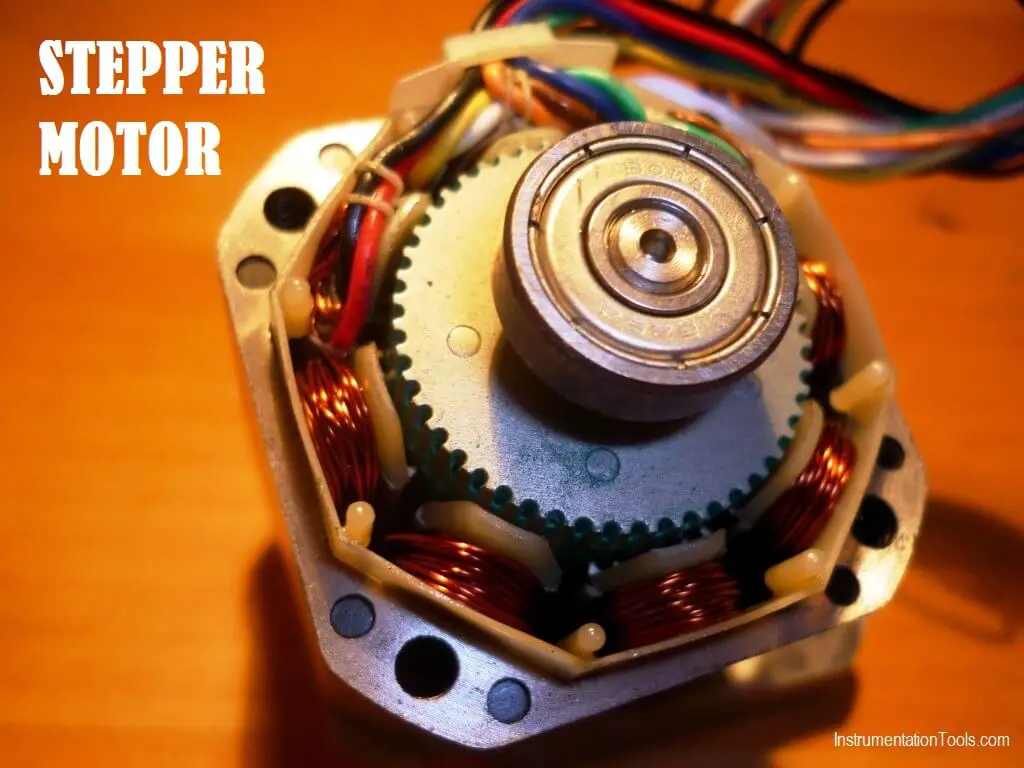
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же ;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.
К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Устройство и принцип работы
Рис. 1. Принцип действия шагового двигателяНа рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельс
Драйверы серии TMC2***
TMC2100


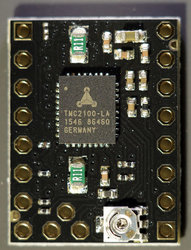
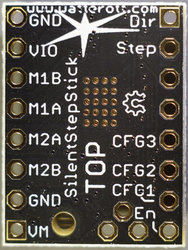
TMC2100 – драйвер шагового двигателя, предназначенный для бесшумной или плавной работы за счет интерполяции микрошагов microPlyer. Это означает, что если процессор просит TMC2100 сделать один микрошаг, он делает 16 интерполированных микрошагов на каждый реальный микрошаг. То есть он может сделать 256 микрошагов (16*16) и нет необходимости процессору для вычисления всех 256 микрошагов, драйвер за него это сделает.
Характеристики
Логика совместима с драйвером A4988. Напряжение от 3В до 5В.
Ток до 1,2А (максимально до 2,5А)
Настройки микрошага 1/16 или 1/256
Напряжение для двигателя от 5 до 45В
stealthChop — для бесшумной работы и плавного движения. Чрезвычайно плавное движение является полезным для многих приложений.
spreadCycle — предлагает плавную работу и большую энергетическую эффективность в широком диапазоне скоростей и нагрузок, то есть очень быстрая реакция на изменение скорости и нагрузки двигателя
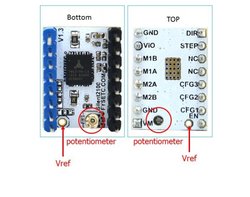
Чип расположен на нижней части драйвера. Это сделано потому что низ чипа лучше рассеивает тепло. Радиатор нужно устанавливать на печатную плату. Vref регулируется через отверстие в печатной плате.
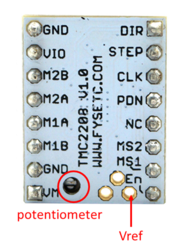
TMC2208
TMC2208 – драйвер шагового двигателя, создан, как более мощная альтернатива TMC2100
Характеристики
Логика совместима с драйвером A4988.
Ток до 2А. Зависит он установленных Rsense
Конфигурации микрошага 1/2, 1/4, 1/8, 1/16. Все они с интерполяцией до 1/256
1/256 без интерполяции только с управлением по UART
Напряжение для двигателя от 4,75 до 36В
Напряжение питания силовой части — 5.5 — 36 В;
Напряжения питания логической части — 3-5 В;
Ток максимальный, с дополнительным охлаждением — 2 A;
TMC2130
ток – 1.2a
Шаг до 256
Напряжение двигателя: 5.5-45 В
Напряжение логики: 3.3-5 В
При использовании в RAMPS1.4 или MKS Gen,снимите третью перемычку
Обратить внимание на положение при установке
Прикрепите теплоотвод, непосредственно к плате
Направление двигателя противоположное к A4988 и drv8825, настройте прошивку или настройте проводку двигателя, если хотите установить вместо A4988.
Настройка тока шаговых двигателей на драйверах TMC2100/TMC2130/TMC2208
термины:
Vref – Напряжение замеряемое вольтметром между пином Vref и GND от 0 до 2,5 вольт.
Irms – Постоянный ток подаваемый на двигатели.
Imax – Пиковый ток подаваемый на двигатели.
Произведем необходимые расчеты:Формула для расчета напряжения Vref из постоянного тока Irms кторый мы хотим задать:
Vref = (Irms * 2.5) / 1.77
Формула для расчета постоянного тока Irms который настроен на драйверах:
Irms = (Vref * 1.77) / 2.5
Зная постоянный ток Irms можно рассчитать пиковый ток Imax:
Imax = Irms * 1.41
А так же можно произвести обратный расчет из пикового тока Imax в номинальный Irms:
Irms = Imax / 1.41
Практические примеры:
Пример 1:
Я хочу подавать постоянный ток 1А, подставим получим формулу:
Vref = (1A * 2.5) / 1.77 = 1.41V
Полученное напряжение необходимо выставить при помощи вольтметра на потенциометре шагового драйвера.
Пример 2:
Мы не знаем какой ток подается на шаговые двигатели и хотим это выяснить.
Нам необходимо замерить Vref на шаговом драйвере, например мы получили 1,1V, подставив полученные данные в формулу получим постоянный ток на котором работают двигатели в данный момент:
Irms = (1.1V * 1.77) / 2.5 = 0.77A
Пример 3:
Шаговые драйверы TMC, в отличии от других, умеют подавать ток в зависимости от текущей нагрузки, так например если нагрузки нет, драйвер будет подавать ток меньше номинального, если нагрузка возрастет он поднимет ток до необходимого уровня для преодоления нагрузки, при этом не превышая значения тока Imax. Допустим у меня есть двигатели с рабочим током 1.5А, я хочу что бы пиковый ток был 1,5А, а постоянный был меньше, что бы двигатели не перегревались.
Пример 4:
Irms = (Vref * 1,77A) / 2,5V
Vref = (Irms * 2,5V) / 1,77A
Current Limit = 1.41 * Irms
Например для 17HS4401: Vref = (Current Limit * 0,707 * 2,5В) / 1,77А = (1,7 * 0,707 * 2,5) / 1,77 = 1,697В
При таком Vref шаговый двигатель возможно будет нагреваться, поэтому Vref придётся подстроить во время работы.
Расчитаем постоянный ток Irms:
Irms = 1.5А / 1.41 = 1.06А
Расчитаем Vref из постоянного тока Irms:
Vref = (1.06А * 2.5) / 1.77 = 1.49v
Важно:
1 – Максимальный постоянный ток для данных драйверов 1.2А.
2 – Измерять Vref можно между либо между потенциометром и GND, либо между пином Vref и GND.
3 – Во время настройки Vref необходимо отключать кабель двигателя во избежании повреждения драйвера.
4 – Для настройки необходимо подавать внешнее питание на шилд, а не на USB ардуины.Настройка Vref на драйверах:Для удобства настройки желательно наличие две пары рук, маленькая плоская отвертка – желательно керамическая, вольтметр.
Вольтметр необходимо установить в измерение постоянного напряжения до 2 вольт.
Первая пара рук настраивает отверткой вольтаж потенциометром постоянно контролируя показания вольтметра.
Вторая пара рук удерживает красный положительный щуп на пин Vref или потенциометр и черный щуп на GND, для удобства GND можно использовать вход на плату с блока питания.
Точки замеров:
TMC2130 TMC2100 TMC2208
Некоторые моменты которые стоит учитывать:
На практике использование дробления шага 1/32 вместо 1/16 не приводит к увеличению разрешения. Но может приводить к увеличению нагрева драйвера и двигателя, снижению момента двигателя. Не всегда использование 1/32 приведёт и к снижению шума, как в режиме удержания, так и режиме хода.
При дроблении шага уменьшается момент вращения шагового двигателя, что черевато пропуском шагов и не очень хорошо для фрезера.
FAQ • Что такое драйвер шагового двигателя?
Драйвер шагового двигателя – электронное устройство, которое заставляет шаговый двигатель “шагать” по сигналам управления. Стандартом де-факто в области управления ШД являются сигналы STEP/DIR/ENABLE. STEP это сигнал шага, DIR это сигнал направления вращения, ENABLE это сигнал включения драйвера.
Более научное определение – драйвер шагового двигателя это электронное силовое устройство, которое на основании цифровых сигналов управления управляет сильноточными/высоковольтными обмотками шагового двигателя и позволяет шаговому двигателю делать шаги (вращаться).
Управлять ШД намного сложнее чем обычным коллекторным двигателем — нужно в определенной последовательности переключать напряжения в обмотках с одновременным контролем тока. Поэтому для управления ШД разработаны специальные устройства — драйверы ШД. Драйвер ШД позволяет управлять вращением ротора ШД в соответствии с сигналами управления и электронным образом делить физический шаг ШД на более мелкие дискреты.
К драйверу ШД подключается источник питания, сам ШД (его обмотки) и сигналы управления. Стандартом по сигналам управления является управление сигналами STEP/DIR или CW/CCW и сигнал ENABLE.
Протокол STEP/DIR:
Сигнал STEP — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т.д.). Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал DIR — Потенциальный сигнал, сигнал направления. Логическая единица — ШД вращается по часовой стрелке, ноль — ШД вращается против часовой стрелки, или наоборот. Инвертировать сигнал DIR обычно можно либо из программы управления или поменять местами подключение фаз ШД в разъеме подключения в драйвере.
Протокол CW/CCW:
Сигнал CW — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т. д.) по часовой стрелке. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал CW — Тактирующий сигнал, сигнал шага. Один импульс приводит к повороту ротора ШД на один шаг (не физический шаг ШД, а шаг выставленный на драйвере — 1:1, 1:8, 1:16 и т. д.) против часовой стрелки. Обычно драйвер отрабатывает шаг по переднему или заднему фронту импульса.
Сигнал ENABLE — Потенциальный сигнал, сигнал включения/выключения драйвера. Обычно логика работы такая: логическая единица (подано 5В на вход) — драйвер ШД выключен и обмотки ШД обесточены, ноль (ничего не подано или 0В на вход) — драйвер ШД включен и обмотки ШД запитаны.
Драйверы ШД могут иметь дополнительные функции:
• Контроль перегрузок по току.
• Контроль превышения напряжения питания, защита от эффекта обратной ЭДС от ШД. При замедлении вращения, ШД вырабатывает напряжение, которое складывается с напряжением питания и кратковременно увеличивает его. При более быстром замедлении, напряжение обратной ЭДС больше и больше скачок напряжения питания. Этот скачок напряжения питания может привести к выходу из строя драйвера, поэтому драйвер имеет защиту от скачков питающего напряжения. При превышении порогового значения напряжения питания драйвер отключается.
• Контроль переполюсовки при подключении сигналов управления и питающих напряжений.
• Режим автоматического снижения тока обмотки при простое (отсутствии сигнала STEP) для снижения нагрева ШД и потребляемого тока (режим AUTO-SLEEP).
• Автоматический компенсатор среднечастотного резонанса ШД. Резонанс обычно проявляется в диапазоне 6-12 об/сек, ШД начинает гудеть и ротор останавливается. Начало и сила резонанса сильно зависит от параметров ШД и его механической нагрузки. Автоматический компенсатор среднечастотного резонанса позволяет полностью исключить резонирование ШД и сделать его вращение равномерным и устойчивым во всем диапазоне частот.
• Схему изменения формы фазовых токов с увеличением частоты (морфинг, переход из режима микрошага в режим шага при увеличении частоты). ШД способен отдать заявленный в ТХ момент только в режиме полного шага, поэтому в обычном драйвере ШД без морфинга при использовании микрошага ШД работает на 70% от максимальной мощности. Драйвер ШД с морфингом позволяет получить от ШД максимальную отдачу по моменту во всем диапазоне частот.
• Встроенный генератор частоты STEP – удобная функция для пробного запуска драйвера без подключения к ПК или другому внешнему генератору частоты STEP. Также генератор будет полезен для построения простых систем перемещения без применения ПК.
Мы предоставляем открытый коммуникационный протокол, а также готовое программное обеспечение под ОС Windows для работы с контроллерами серии SMSD.
Для контроллеров SMSD‑4.2CAN предоставляется программа CANOpen Builder для конфигурирования работы по протоколу CANopen через USB подключение. Программа также позволяет выполнить тестовые запуски шагового привода через SDO запросы, настроить параметры работы в сети CAN, сконфигурировать необходимые TPDO/RPDO, пакетов, выполнить сброс к заводским настройкам. Программа также позволяет получить доступ к объектному словарю блока через USB интерфейс, выполняет расчёты параметров управления шаговым двигателем для режима управления напряжением.
Для контроллеров SMSD‑LAN мы предоставляем программу SMC‑Program‑LAN, с помощью которой можно составлять и записывать пользовательские программы в память блока, считывать программы из памяти блока, осуществлять покомандное управление приводом (режим direct control). Готовые программы управления можно записывать в файл на ПК и считывать их из файла. Программа также позволяет считывать и изменять настройки передачи по сети Ethernet и изменять пароль доступа к контроллеру. Соединение с компьютером в программе SMC‑Program‑LAN доступно как по сети Ethernet, так и через USB.
Для контроллеров SMSD‑Modbus предоставляется две программы – SMSD Controller Demonstrator и SMC‑Program‑Modbus.
SMSD Controller Demonstrator предназначена конфигурирования контроллера, считывания и записи пользовательских программ в память блока, изменения регистров контроллера. Также SMSD Controller Demonstrator содержит утилиту SMSD Updater для поиска обновлений программного обеспечения контроллера и их установки.
SMC‑Program‑Modbus предназначена для управления шаговым приводом в режиме Direct Control, считывания текущих параметров работы привода, изменения основных настроек движения. Программа позволяет редактировать и записывать в память контроллера пользовательские программы. Редактирование программ доступно в виде списка инструкций IL и в виде лестничных диаграмм (начиная с версии ПО V.2.0).
Помимо программ для ПК мы предлагаем HMI панели с готовым программным обеспечением для работы с контроллерами SMSD‑Modbus. HMI панель с готовым ПО позволяет осуществлять контроль за состоянием блока без использования ПК, считывать пользовательские программы из памяти, редактировать и записывать готовые программы в память контроллера. Готовые программы можно переносить с ПК на HMI панель с помощью Flash накопителей (USB).
Для работы с контроллерами SMSD‑1.5 предоставляется программа SMC‑Program ver.4.0.5. Программа предназначена для создания, редактирования пользовательских программ, считывания программ из памяти и записи программ в память контроллеров. Также программа позволяет осуществлять управление шаговым приводом в режиме реального времени direct control.
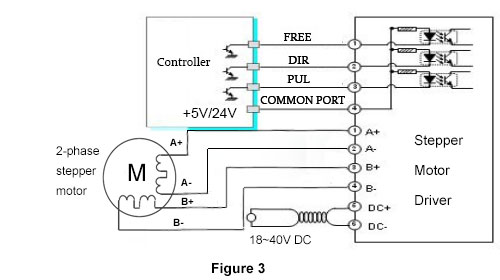
Отличия контроллеров шаговых двигателей нового поколения от контроллеров, разработанных в начале 21 века.
Увеличить картинку “Отличия контроллеров шаговых двигателей нового поколения от контроллеров, разработанных в начале 21 века”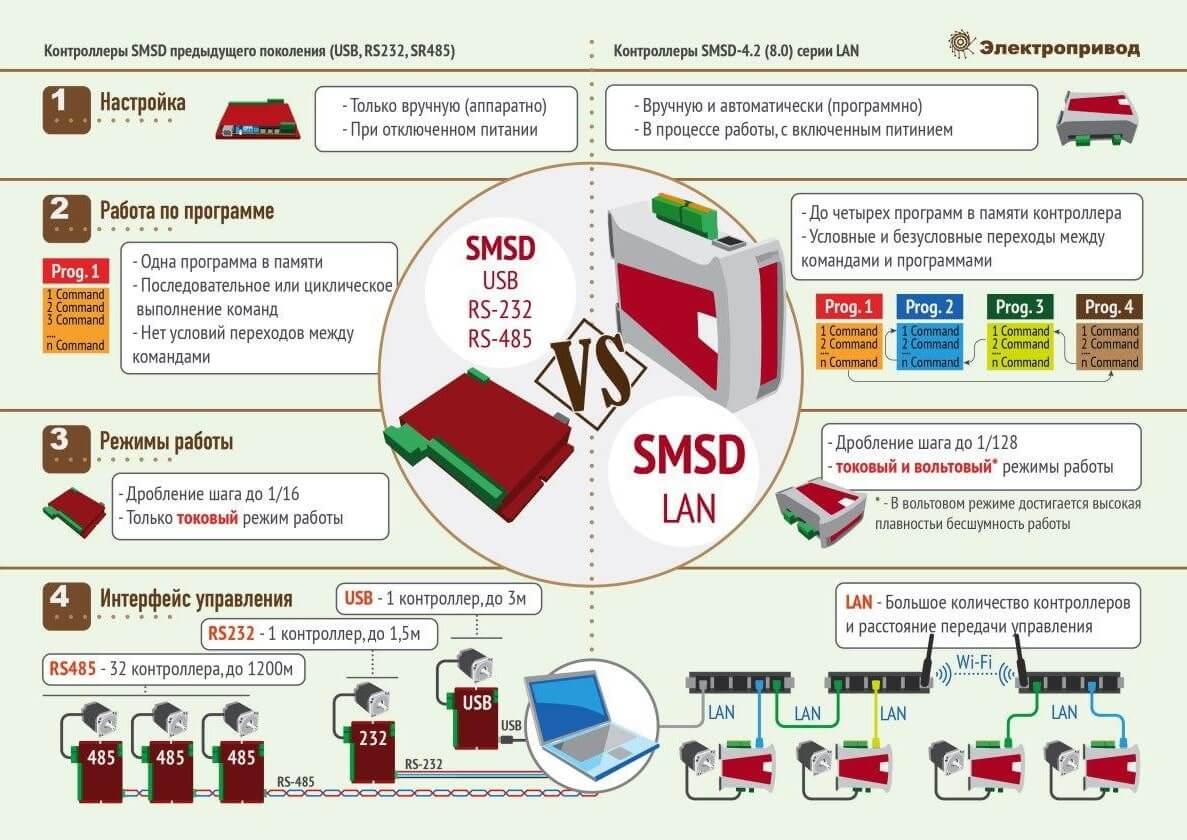
Шаговые двигатели (подробный разбор 4 типов)
Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90°).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.
На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
- Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим – ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим – ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим – ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.
Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.
Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.
Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.
Если подавать уровни не «0» – «½» – «1» (как на картинке), а «0» – «¼» – «½» – «¾» – «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления – доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.
Драйвер шагового двигателя является достаточно важным компонентом любого ЧПУ устройства, управляя движением каждой из осей. Перед использованием необходимо убедиться, что они правильно установлены и настроены, чтобы не допустить перегорание шаговых моторов или платы контроллера Arduino Sheild.
Настройку тока драйвера необходимо сделать для решения нескольких достаточно важных моментов:
— уменьшить вероятность пропуска шагов при низком токе;
— снижение нагрева драйвера и шагового двигателя при высоком напряжении;
— снизить шум при высоких значениях тока;
Для настройки тока нам понадобится:
— контроллеры с установленными драйверами;
— драйвера А4988 или DRV8825;
— мультиметр;
— отвертка.
Для начала необходимо собрать и подключить всю систему в полношаговом режиме. После сборки «бутерброда» из контроллера Ардуино, ЧПУ шилда и драйверов шаговых двигателей необходимо подключить шаговые двигатели. В описании к выбранным моторам надо узнать значение максимального тока Imax (для примера у шагового двигателя 17HS8401 это значение 1,8А)
Затем надо рассчитать значение опорного напряжения Vref на переменном резисторе для каждого типа драйверов, у нас их два: А4988 или DRV8825.
Формула опорного напряжения Vref для драйверов отличается.
Расчет для драйвера типа А4988.
Для A4988 формула расчета зависит от номинала резисторов, которые распаяны на плате драйвера. Если присмотреться, то можно увидеть надписи R050 или R100.
На приведенной фотографии они обведены черными кружками, их значение R100.
В общем виде формула выглядит как:
Vref = Imax * 8 * (RS)
Imax — максимальный ток на обмотках двигателя, из описания;
RS — сопротивление резистора, если резистор подписан R100, то RS=0,100, при R050 значение RS=0,05.
Для двигателя из нашего примера 17HS8401
Vref = 1,8 * 8 * 0,100 = 1,44 В.
Из-за того, что рабочий ток двигателя обычно рекомендуется ограничивать в 70% от максимального тока, для уменьшения перегрева двигателя, полученное значение необходимо умножить на 0,7.
Vref= 1,44*0,7 = 1,01 В.
Расчет для драйвера типа DRV8825.
Формула опорного напряжение для данного типа драйвера:
Vref = Imax/2
При рекомендованной работе на 70% от максимального тока двигателя, подставив значения для нашего примера, получим следующие значения:
Vref = 0.7*1,8 / 2 = 0.63V
Настройка тока драйвера на контроллере.
Для настройки необходимо подключить сборку плат к компьютеру,
Включить на мультиметре измерение постоянного напряжения напротив положения “20”.
Для измерения напряжения необходимо минусовой щуп приложить к минусу на CNC Sheild, а положительный щуп замкнуть с подстроечным резистором, который по совместительству является “+” в данной схеме.
Необходимо вращать подстроечный резитор, пока мультиметр не покажет требуемое значение напряжения, при вращении по часовой стрелке, значения растут, против часовой стрелки – напряжение падает.
Настройку расчетных значений необходимо повторить это для всех активных драйверов в сборке.
Схема драйвера шагового двигателяс использованием микросхемы 555
В этом проекте мы узнаем, как создать простую схему управления однополярным драйвером шагового двигателя с использованием таймера 555 ИС. Помимо таймера 555 нам также понадобится IC CD 4017, который является микросхемой десятилетия.
By Ankit Negi
Любой униполярный двигатель может быть подключен к этой цепи для выполнения конкретной задачи, хотя сначала нужно сделать небольшие изменения.
Скорость шагового двигателя можно контролировать с помощью потенциометра, подключенного между разгрузочным и пороговым контактом таймера 555.
Основы шагового двигателяШаговые двигатели используются в областях, где требуется определенное количество оборотов, что невозможно при использовании обычных двигателей постоянного тока. Типичное применение шагового двигателя в 3D принтере. Вы найдете два типа популярных шаговых двигателей: UNIPOLAR и BIPOLAR.
Как следует из названия, однополярный шаговый двигатель содержит обмотки с общим проводом, которые могут быть легко подключены по одной.
В то время как биполярный шаговый двигатель не имеет общей клеммы между катушками, из-за чего он не может быть приведен в действие просто с помощью предложенной схемы.Для приведения в действие биполярного шагового двигателя нам понадобится цепь с мостовым креплением.
КОМПОНЕНТЫ:
1. 555 ТАЙМЕР IC
2. CD 4017 IC
3. РЕЗИСТОРЫ 4.7K, 1K
4. ПОТЕНЦИОМЕТР 220K
5. 1 мкФ КОНДЕНСАТОР
6. 4 ДИОДА
1N000 4 ТРАНЗИСТОРА 2N2222
8. УНИПОЛЯРНЫЙ СТЕПНЫЙ ДВИГАТЕЛЬ
9. ИСТОЧНИК ПИТАНИЯ ПОСТОЯННОГО ТОКА
ЦЕЛЬ ТАЙМЕРА 555:
Таймер 555 необходим здесь для генерации тактовых импульсов определенной частоты (может быть изменен с использованием 220 КБ), который определяет Скорость шагового двигателя.
IC 555 Распиновка
НАЗНАЧЕНИЕ CD4017:
Как уже упоминалось выше, это счетчик десятилетий, то есть он может считать до 10 тактовых импульсов. Особенностью этой микросхемы является то, что она имеет собственный встроенный декодер. Благодаря этому вам не нужно добавлять дополнительную микросхему для декодирования двоичных чисел.
4017 отсчитывает до 10 тактовых импульсов от таймера 555 и выдает высокий выходной сигнал, соответствующий каждому тактовому импульсу один за другим из своих 10 выходных контактов. В то время только один контакт является высоким.
НАЗНАЧЕНИЕ ТРАНЗИСТОРОВ:
Здесь существует два назначения транзисторов:
1. Здесь транзисторы действуют как переключатели, таким образом, запитывая одну катушку за раз.
2. Транзисторы позволяют проходить через них большому току, а затем двигателю, таким образом полностью исключая таймер 555, поскольку он может подавать очень небольшое количество тока.
ДИАГРАММА ЦЕПИ:
Подключите, как показано на рисунке.
1. Подсоедините контакт 3 или выходной контакт таймера 555 к контакту 14 (тактовый вывод) микросхемы 4017.
2. Подключите разрешающий контакт или 13-й контакт 4017 к земле.
3. Подключите контакты 3,2,4,7 по одному к транзисторам 1,2,3,4 соответственно.
4. Подключите 10-й и 15-й контакты к земле через резистор 1 кОм.
5. Подсоедините общий провод шагового двигателя к положительному полюсу питания.
6. Подсоедините другие провода шагового двигателя таким образом, чтобы катушки были под напряжением один за другим для правильного завершения одного полного оборота (см. Таблицу данных двигателя, предоставленную производителем). 4017 ПОДКЛЮЧЕН К СВОЕМУ ПИН 15 (СБРОС ПИН)?
Как уже упоминалось выше, 4017 подсчитывает тактовые импульсы один за другим до 10-го тактового импульса и дает высокий выходной сигнал на выходных контактах соответственно, каждый выходной контакт становится высоким.
Это вызывает определенную задержку вращения двигателя, которая не нужна. Поскольку нам требуется только первые четыре контакта для одного полного оборота двигателя или первые четыре десятичных числа от o до 3, вывод №. 10 подключен к контакту 15, так что после 4-го счета IC сбрасывается и счет начинается снова с начала. Это гарантирует отсутствие прерывания вращения двигателя.
РАБОТА:
После правильного подключения, если вы включите цепь, двигатель начнет вращаться постепенно. Таймер 555 вырабатывает тактовые импульсы в зависимости от значений резистора, потенциометра и конденсатора.
При изменении значения любого из этих трех составляющих частота тактового импульса изменится.
Эти тактовые импульсы передаются на IC CD 4017, который затем подсчитывает тактовые импульсы один за другим и выдает 1 в качестве выхода на вывод № 3,2,4,7 соответственно и непрерывно повторяет этот процесс.
Поскольку транзистор Q1 подключен к контакту 3, он сначала включается, затем транзистор Q2, а затем Q3 и Q4. Но когда один транзистор включен, все остальные остаются выключенными.
Когда Q1 включен, он действует как замкнутый переключатель, и ток протекает через общий провод к проводу 1, а затем к земле через транзистор Q1.
Это возбуждает катушку 1, и двигатель вращается под некоторым углом, который зависит от тактовой частоты. Затем то же самое происходит с Q2, который возбуждает катушку 2, за которой следуют катушка 3 и катушка 4. Таким образом, получается один полный оборот.
При вращении потенциометра:
Допустим, изначально положение кастрюли таково, что существует максимальное сопротивление (220 кОм) между разрядом и пороговым выводом. Формула для частоты выходного тактового импульса:
F = 1,44 / (R1 + 2R2) C1
Из формулы ясно, что частота тактовых импульсов уменьшается с увеличением значения R2.Таким образом, когда значение R2 или банка является максимальным, частота является минимальной, из-за чего IC 4017 считает медленнее и дает более задержанный выход.
По мере уменьшения значения сопротивления R2 частота увеличивается, что приводит к минимальной задержке между выходами IC 4017. И, следовательно, шаговый двигатель вращается быстрее.
При этом значение потенциометра определяет скорость шагового двигателя.
ВИДЕО МОДЕЛИРОВАНИЯ:
Здесь вы можете ясно увидеть, как скорость двигателя изменяется в зависимости от сопротивления R2. Его значение сначала уменьшается, а затем увеличивается, что, в свою очередь, сначала увеличивает, а затем уменьшает скорость шагового двигателя.
О Swagatam
Я инженер-электронщик (dipIETE), любитель, изобретатель, разработчик схем / печатных плат, производитель. Я также являюсь основателем веб-сайта: https://www.homemade-circuits.com/, где я люблю делиться своими инновационными идеями и учебными пособиями.
Если у вас есть запрос, связанный со схемой, вы можете взаимодействовать через комментарии, я буду очень рад помочь!
Схема привода шагового двигателя | ATO.com
Однополярная и биполярная архитектура драйверов чаще всего используются для шаговых двигателей.
Униполярный шаговый двигатель обозначает шаговый двигатель с 2 катушками и 5 или 6 линиями. То есть один кран увеличивается в середине одной катушки. 5 строк можно увидеть как 6. Две промежуточные линии двух катушек могут быть соединены. Поскольку в середине одной катушки имеется ответвление, ток может течь в разные стороны вдоль половины пути одной катушки, но половина катушки двигателя просто используется.
Цепь однополярного привода использует четыре транзистора для управления двумя фазами шагового двигателя. Конфигурация двигателя, как показано на рисунке 1, состоит из двух комплектов катушек с центральным отводом, и весь двигатель имеет в общей сложности шесть линий, соединенных с внешней стороной. Хотя шестипроводный шаговый двигатель также известен как однополярный шаговый двигатель, он может фактически использовать однополярную или биполярную схему возбуждения одновременно.
 Биполярный шаговый двигатель обозначает шаговый двигатель с 2 катушками и 4 линиями. Ток может течь в прямом и обратном направлении в двух катушках, так называемой биполярности.
Биполярный шаговый двигатель обозначает шаговый двигатель с 2 катушками и 4 линиями. Ток может течь в прямом и обратном направлении в двух катушках, так называемой биполярности.
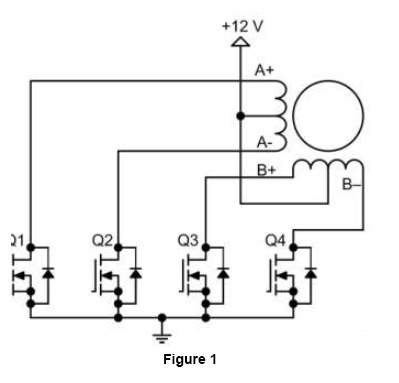
Схема возбуждения биполярного шагового двигателя показана на рисунке 2, в котором используются восемь транзисторов для управления двумя фазами. Схема двухполярного привода также может приводить в действие четырехпроводный или шестипроводный шаговый двигатель. Хотя он может использовать только двухполюсную схему привода, четырехпроводный двигатель может значительно снизить стоимость приложений массового производства. Количество транзисторов, используемых в цепях возбуждения биполярных шаговых двигателей, вдвое больше, чем у транзисторов, используемых в однополярной схеме возбуждения, в которой четыре нижних транзистора обычно приводятся в движение непосредственно микроконтроллером, в то время как верхнему транзистору требуется верхняя схема возбуждения с более высокой стоимостью.Транзисторы, используемые в биполярных цепях возбуждения, должны выдерживать только напряжение двигателя. Следовательно, им не нужно зажимать ту же цепь, что и схемы однополярного привода.
 Биполярный двигатель отличается высокой эффективностью применения для протекания тока в прямом и обратном направлениях одной катушки. Что касается униполярного шагового двигателя, КПД является низким, поскольку половина катушки используется только большую часть времени. Однако, с точки зрения строгих требований к стоимости, униполярный двигатель широко применяется. Но АТО.com предоставляет все виды биполярных шаговых двигателей с низкой стоимостью для вашей справки.
Биполярный двигатель отличается высокой эффективностью применения для протекания тока в прямом и обратном направлениях одной катушки. Что касается униполярного шагового двигателя, КПД является низким, поскольку половина катушки используется только большую часть времени. Однако, с точки зрения строгих требований к стоимости, униполярный двигатель широко применяется. Но АТО.com предоставляет все виды биполярных шаговых двигателей с низкой стоимостью для вашей справки.
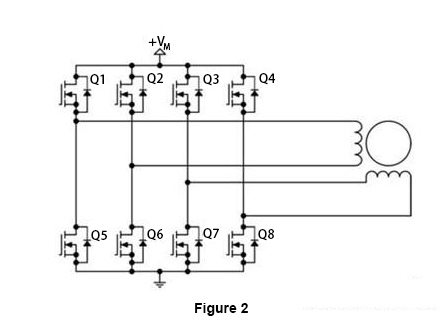
Теперь, чтобы узнать больше о схеме привода шагового двигателя, мы возьмем в качестве примера наш шаговый двигатель ATO47-1684A и шаговый драйвер ATODSP42. ATO47-1684A – 2-фазный 4-х проводный биполярный шаговый двигатель с углом наклона 1,8 градуса. ATODSP42 – это цифровой двухфазный драйвер шагового двигателя с обратной связью, который использует новейшую 32-разрядную технологию управления DSP, подходящую для шаговых двигателей Nema 11, 14, 17. Как показано на рисунке 3, легко найти способ соединения шагового двигателя с драйвером шагового двигателя.
Описание драйвера A4988:
Драйвер шагового двигателя A4988 является полным драйвером для микрошагового двигателя с переводчиком по умолчанию для простоты эксплуатации. Это 16-контактный драйвер. Драйвер A4988 специально разработан для управления биполярными микрошаговыми двигателями в различных режимах, таких как двухступенчатый, полушаговый, четвертьшаговый, восьмой и шестнадцатеричный, и имеют выход прибл. до ± 2А и 35В . Драйвер A4988 также содержит стабильный регулятор тока отключения, который может работать в смешанном режиме или в медленном режиме.
Переводчик облегчает внедрение A4988. Двигатель приводится в действие одним микрошагом с простым одним входным импульсом на STEP. A4988 имеет идеальный интерфейс для приложений, если сложный микропроцессор перегружен или недоступен.

Драйвер A4988 автоматически выбирает текущий режим затухания между смешанным или медленным. В режиме смешанного затухания управление током приводит к меньшему шуму двигателя, большей точности шага и минимальному рассеянию мощности.В режиме смешанного затухания первоначально устройство устанавливается в режим быстрого затухания для пропорции фиксированного времени отключения, а затем в медленный режим для напоминания о времени простоя.
Разделительная плата для биполярного шагового двигателя с драйвером A4988 имеет такие функции, как регулируемая защита от перегрузки по току, ограничения тока и температуры с разрешением до пяти различных микрошагов.
Основные характеристики драйвера A4988:
- Простой интерфейс управления шагом и направлением
- Автоматически обнаруживает или выбирает текущий режим затухания
- Возможность синхронной ратификации с меньшей потерей мощности
- Внутренняя блокировка под напряжением
- Защита от перекидного тока
- Совместим с 3.3 В и 5 В логическое питание
- Система термического отключения
- Защита с заземлением
- Step моды могут быть выбраны среди полных, половинных, 1/4 th , 18 th и 1/16 th
Принципиальная схема драйвера шагового двигателя A4988

Black Edition:
A4988 держатель носителя с шаговым двигателем – на рынке также доступно черное издание, обладающее на 20% большей производительностью, за исключением тепловых характеристик.Это (зеленое) и черное издание взаимозаменяемы.
Встроенное оборудование:
Кронштейн привода шагового двигателя A4988 включает в себя 16-контактный разъединяемый 0,1 ”наружный разъем. Этот заголовок должен быть припаян с женским заголовком 0,1 или макетом. Вы можете подключить провод двигателя непосредственно к макету.
Подключение питания:
Драйверу требуется логическое питание 3 В – 5,5 В на контактах VDD и GND и напряжение питания двигателя 8 В-35 В, которое должно быть подключено к VMOT и GND.Рядом с платой должны быть развязывающие конденсаторы для этих источников питания, и они должны быть способны подавать расчетные (до 4 А) токи для питания двигателя.
Как управлять шаговым двигателем с помощью драйвера A4988
,
Шаговый двигатель – это цифровое устройство. Цифровая информация обрабатывается шаговым двигателем для достижения конечного результата, в данном случае управляемого движения. Можно предположить, что шаговый двигатель будет надежно следовать цифровым инструкциям, как и ожидается компьютеру. Это отличительная особенность шагового двигателя.
Шаговый двигатель – это электрический двигатель, который приводится в действие цифровыми импульсами, а не непрерывно подаваемым напряжением.Этой концепции присуще управление с разомкнутым контуром, при котором последовательность импульсов преобразуется в очень много оборотов вала, причем каждый оборот требует определенного количества импульсов.
Каждый импульс равен одному вращательному приращению или шагу (отсюда и название, шаговый, шаговый или шаговый двигатель), который является только частью одного полного вращения.
Таким образом, в шаговом двигателе могут быть применены счетные импульсы для достижения желаемой величины вращения вала. Счетчик автоматически показывает, сколько движения было достигнуто, без необходимости получения информации обратной связи, как это было бы в случае сервосистем и других технологий.
Хотя это и не требуется, большинство шаговых двигателей могут содержать энкодер при желании.
Примечание: для этого обсуждения, шаговый, шаговый и шаговый мотор (ы) используются взаимозаменяемо.
Применения для шагового двигателя
Хотя в прошлом шаговый двигатель был омрачен сервосистемами для управления движением, он стал предпочтительной технологией во все большем числе областей.
Основным фактором в этой тенденции к шаговым двигателям является преобладание цифрового управления, появление микропроцессора, улучшенного дизайна, т.е.е. модели с высоким крутящим моментом и более низкой стоимостью.
Сегодня нас окружают приложения с шаговыми двигателями: они используются в принтерах (подача бумаги, колесо печати), дисководы, часы и часы, а также в автоматизации производства и машиностроении.
Применение сервомотора включает в себя промышленные компании, эксплуатирующие или разрабатывающие автоматизированное оборудование или процессы, которые включают упаковку для пищевых продуктов, косметики или медицинской продукции, требования к маркировке или вскрытию, применение нарезки по длине, сборку, конвейер, обработку материалов, робототехнику, специальную съемку и проекционные эффекты, медицинская диагностика, камеры слежения, приборы контроля и безопасности, средства управления самолетом, управление потоком насоса, изготовление металла (станки с ЧПУ) и модернизация оборудования.
Шаговый двигатель чаще всего встречается в системах движения, требующих контроля положения.
Также читайте: Шаговые двигатели Объективные вопросы и ответы
Типы шаговых двигателей
Существует три основных типа шаговых двигателей. Эти типы шаговых двигателей различаются в зависимости от конструкции и способа их функционирования. Каждый тип шагового двигателя предлагает решение для применения по-своему. Три основных типа шагового двигателя включают переменное сопротивление, постоянный магнит и гибрид.
1. Шаговый двигатель с переменным сопротивлением (VR)
Шаговый двигатель с переменным сопротивлением известен тем, что имеет ротор из мягкого железа и конструкцию обмоточного статора.
Шаговый двигатель с переменным сопротивлением обычно работает с шагом от 5 до 15 градусов при относительно высоких скоростях шага. Они также не обладают фиксированным моментом.
2. Шаговый двигатель с постоянным магнитом (PM)
Шаговый двигатель с постоянным магнитом отличается от шагового двигателя с переменным сопротивлением наличием роторов с постоянными магнитами без зубьев.Эти роторы намагничены перпендикулярно оси. Когда четыре фазы включены последовательно, ротор вращается, когда он притягивается к магнитным полюсам.
Шаговый двигатель с постоянным магнитом, как правило, имеет угол наклона от 45 до 90 градусов и имеет тенденцию двигаться с относительно низкими скоростями, но обеспечивает высокий крутящий момент и отличные демпфирующие характеристики.
3. Гибридный шаговый двигатель
Гибридный шаговый двигатель сочетает в себе свойства шаговых двигателей с постоянным магнитом и переменным сопротивлением.Гибридный шаговый двигатель имеет некоторые из желательных особенностей каждого. Этот тип шагового двигателя имеет высокий фиксированный крутящий момент, отличное удержание и динамический крутящий момент, и они могут работать на высоких скоростях шага.
В гибридном шаговом двигателе обычно видны углы шага от 0,9 до 5,0 градусов. На этот шаговый двигатель обычно подается бифилярная обмотка, так что для питания шагового двигателя может использоваться один источник питания.
Ротор будет вращаться с шагом 1,8 градуса, если фазы запитаны по одной в том порядке, в котором они указаны a.Этот шаговый двигатель может приводиться в движение одновременно в две фазы, чтобы увеличить крутящий момент. Гибридный шаговый двигатель также может приводиться в действие одной, затем двумя, а затем одной фазой для получения полшага с шагом 0,9 градуса.
Режимы шагового двигателя
Существует три режима возбуждения, которые обычно используются с шаговым двигателем. Этими режимами шагового двигателя являются полноступенчатый, полушаговый и микрошаговый.
1. Шаговый двигатель – полный шаг
В режиме полного шага шаговый двигатель шагает по нормальному углу шага, e.грамм. 200 шаговых / оборотных двигателей занимают 1,8 шага, а в полушаговом режиме – 0,9 шага. Существует два вида полношаговых режимов.
Однофазное двухступенчатое возбуждение – это когда шаговый двигатель работает только с одной фазой, включенной за раз. Этот режим следует использовать только в тех случаях, когда значения крутящего момента и скорости не важны, когда двигатель работает с фиксированной скоростью и условия нагрузки четко определены.
Обычно шаговые двигатели используются в полноступенчатом режиме в качестве замены в существующих системах движения и не используются в новых разработках.Проблемы с резонансом могут помешать работе на некоторых скоростях. Этот тип режима требует наименьшего количества энергии от источника питания привода любого из режимов возбуждения.
Двухфазное двухступенчатое возбуждение – это когда шаговый двигатель работает с двумя фазами под напряжением одновременно. Этот режим обеспечивает хорошие характеристики крутящего момента и скорости с минимумом проблем с резонансом.
Примечание: Двойное возбуждение, обеспечивает примерно на 30-40% больше крутящего момента, чем одиночное возбуждение, но требует в два раза большей мощности от источника питания привода.Многие драйверы микрошагов могут быть при необходимости установлены в полноступенчатый режим.
2. Шаговый двигатель – полушаговый
Полушаговый режим возбуждения шагового двигателя представляет собой чередование однофазной и двухфазной работы, в результате чего шаги равны половине шага нормального размера.
Следовательно, этот режим обеспечивает двойное разрешение. В то время как выходной крутящий момент двигателя изменяется на разных этапах, это более чем компенсируется необходимостью проходить только половину угла. Этот режим предлагает практически полную свободу от проблем с резонансом.
Шаговый двигатель может работать в широком диапазоне скоростей и использоваться для привода практически любой обычно встречающейся нагрузки. Хотя полушаговые драйверы по-прежнему являются популярным и доступным выбором, многие новые драйверы для микрошагов являются экономически эффективной альтернативой.
3. Шаговый двигатель – Microstep
В режиме многоступенчатого шагового двигателя естественный угол шага шагового двигателя можно разделить на гораздо меньшие углы.
Например, стандартный двигатель на 1,8 градуса имеет 200 ступеней / оборот.Если двигатель имеет микрошаг с делением на 10, то каждый микро шаг двигает двигатель на 0,18 градуса, что составляет 2000 шагов / оборот.
Микрошагы создаются путем пропорционального распределения тока в двух обмотках в соответствии с функциями синуса и косинуса. Этот режим используется только там, где требуется более плавное движение или большее разрешение.
Как правило, режимы микрошага варьируются от деления на -10 до деления на-256 (51 200 шагов / об / мин для двигателя 1,8 градуса).
Некоторые драйверы микрошагов имеют фиксированный делитель, в то время как более дорогие драйверы микрошагов предоставляют выбор делителей.
Примечание: В целом, чем больше предусмотрен делитель микрошагов, тем дороже драйвер шагового двигателя.
Обратная связь шагового двигателя
Обычно шаговый двигатель управляется драйвером и индексатором / контроллером. Количество, скорость и направление вращения шагового двигателя определяются конкретной конфигурацией цифровых устройств управления.
Основными типами устройств управления шаговыми двигателями являются: драйверы шаговых двигателей и контроллеры шаговых двигателей, которые включают в себя индексаторы и генераторы импульсов.
Драйвер шагового двигателя принимает тактовые импульсы и сигналы направления и преобразует эти сигналы в соответствующие фазные ток для шагового двигателя.
Индексатор шагового двигателя создает тактовые импульсы и сигналы направления для шагового двигателя. Компьютер или ПЛК (программируемый логический контроллер) отправляет команды на индексатор или контроллер.
Экологические соображения по шаговым двигателям
При эксплуатации, обслуживании и ремонте шагового двигателя необходимо соблюдать следующие экологические соображения и правила техники безопасности.
Несоблюдение этих мер предосторожности нарушает стандарты безопасности при проектировании, изготовлении и предполагаемом использовании шагового двигателя, привода и контроллера. Обратите внимание, что даже хорошо сложенный шаговый двигатель, эксплуатируемый и установленный неправильно, может быть опасным в определенных случаях.
Меры предосторожности должны соблюдаться пользователем в отношении нагрузки и рабочей среды. Конечный пользователь несет полную ответственность за правильный выбор, установку и эксплуатацию системы шагового двигателя.
Атмосфера, в которой используется шаговый двигатель, должна соответствовать общепринятым нормам электрического / электронного оборудования. Не эксплуатируйте шаговый двигатель в присутствии легковоспламеняющихся газов, пыли, масла, паров или влаги.
Для наружного использования шаговый двигатель, привод и контроллер должны быть защищены от элементов соответствующей крышкой, обеспечивая при этом достаточный поток воздуха и охлаждение. Влага может привести к поражению электрическим током и / или вызвать поломку системы.
Должное внимание следует уделять предотвращению любых жидкостей и паров.Обратитесь к производителю, если для вашего приложения требуются специальные IP-оценки Целесообразно устанавливать шаговый двигатель, привод и контроллер в среде, свободной от конденсации, пыли, электрических помех, вибрации и ударов.
Кроме того, предпочтительно работать с системой шагового двигателя / привода / контроллера в нестатической защитной среде. Открытая схема всегда должна быть надлежащим образом защищена и / или закрыта, чтобы предотвратить несанкционированный контакт человека с цепью под напряжением.
Никакие работы не должны выполняться при подаче питания.Не подключайте и не отключайте разъемы при включенном питании. Подождите не менее 5 минут, прежде чем проводить инспекционные работы с системой шагового двигателя после выключения питания, поскольку даже после выключения питания в конденсаторах внутренней цепи привода шагового двигателя все еще остается некоторая электрическая энергия.
Запланируйте установку шагового двигателя, привода и / или контроллера в конструкции системы, в которой нет мусора, такого как металлический мусор, полученный при резке, сверлении, постукивании и сварке, или любой другой посторонний материал, который может соприкасаться с схема.Если не допустить попадания мусора в систему шагового двигателя, это может привести к повреждению и / или удару.
Подключение шагового двигателя
Следующая информация предназначена в качестве общего руководства по подключению шаговых двигателей. . сигналы низкого напряжения.Это может привести к системным сбоям и ошибкам связи.
ПРЕДУПРЕЖДЕНИЕ – В системе шагового двигателя могут присутствовать опасные напряжения, способные привести к травме или смерти. Будьте предельно осторожны при обращении, подключении, тестировании и настройке во время установки, настройки, настройки и эксплуатации.
Не вносите чрезмерных корректировок или изменений в параметры системы шагового двигателя, которые могут вызвать механическую вибрацию и привести к поломке и / или потере. После того, как шаговый двигатель подключен, не запускайте шаговый драйвер путем непосредственного включения / выключения источника питания.
Частое включение / выключение питания приведет к быстрому старению внутренних компонентов, что сократит срок службы системы шагового двигателя.
Строго соблюдайте следующие правила:
- Соблюдайте схему подключения для каждого шагового двигателя
- Прокладывайте высоковольтные кабели питания отдельно от низковольтных силовых кабелей.
- Отделите входную силовую проводку и кабели питания шагового двигателя от проводки управления и кабелей обратной связи двигателя, когда они покидают драйвер шагового двигателя.Сохраняйте это разделение на протяжении всей проводки.
- Используйте экранированный кабель для силовой проводки и обеспечьте заземленную клемму зажима на 360 градусов к стене корпуса. Оставьте место на дополнительной панели для изгибов проводов.
- Сделать все кабельные трассы как можно короче.
ПРИМЕЧАНИЕ: Кабели заводского изготовления рекомендуются для использования в наших системах с шаговым двигателем и приводом. Эти кабели приобретаются отдельно и предназначены для минимизации электромагнитных помех.
Эти кабели рекомендуются поверх кабелей, изготовленных заказчиком, чтобы оптимизировать производительность системы и обеспечить дополнительную безопасность для системы с шаговым двигателем и пользователя.
ПРЕДУПРЕЖДЕНИЕ – Во избежание поражения электрическим током, выполняйте все монтаж и подключение шагового двигателя и системы привода перед подачей питания. После подачи питания на соединительные клеммы может быть подано напряжение.
Рис. Анимация шагового двигателя
Монтаж шагового двигателя
Следующая информация предназначена в качестве общего руководства по установке и монтажу системы шагового двигателя.
ПРЕДУПРЕЖДЕНИЕ – В системе шагового двигателя могут присутствовать опасные напряжения, способные привести к травме или смерти. Будьте предельно осторожны при обращении, тестировании и настройке во время установки, настройки и эксплуатации. Очень важно, чтобы проводка шагового двигателя и привода учитывалась при установке и монтаже.
Подпанели, установленные внутри корпуса для установки компонентов системы шагового двигателя, должны быть плоской, жесткой поверхностью, на которой не будет удара, вибрации, влаги, масла, паров или пыли.
Помните, что шаговый двигатель и привод выделяют тепло во время работы; следовательно, рассеивание тепла следует учитывать при проектировании системы. Размер корпуса не должен превышать максимальную температуру окружающей среды.
Рекомендуется установить привод и контроллер шагового двигателя в положение, обеспечивающее достаточный поток воздуха. Шаговый двигатель должен быть надежно закреплен и надежно закреплен, чтобы минимизировать вибрацию.
ПРИМЕЧАНИЕ: Между драйвером шагового двигателя и любыми другими устройствами, установленными в системе / электрической панели или шкафу, должно быть не менее 3 дюймов.Если вы используете реле в вашей системе управления движением, позаботьтесь о защите реле, шагового привода и контроллера и всегда прокладывайте эти провода отдельно. При использовании реле постоянного тока поместите диод на катушку, а при использовании реле переменного тока обязательно используйте MOV.
ПРИМЕЧАНИЕ: Для того чтобы соответствовать требованиям UL и CE, система шагового двигателя должна быть заземлена в заземленном проводящем корпусе, обеспечивающем защиту, как это определено в стандарте EN 6052 (IEC 529) по IP55, так, чтобы они были недоступны для оператор или неквалифицированный человек.
Как и для любой движущейся части системы, шаговый двигатель должен находиться в недоступном для оператора месте. Корпус NEMA 4X превосходит требования, обеспечивающие степень защиты IP66. Чтобы улучшить связь между шиной питания и подпанелью, изготовьте подпанель из оцинкованной (неокрашенной) стали.
Кроме того, настоятельно рекомендуется, чтобы драйвер шагового двигателя и / или контроллер были защищены от помех, вызванных электрическими помехами. Шум от сигнальных проводов может вызвать механическую вибрацию и неисправности.
Также читайте: Разница между шаговым двигателем и серводвигателем
Распространенные причины отказа шагового двигателя и / или шагового драйвера
Примечание: Всегда читайте спецификацию / руководство пользователя, прилагаемое к каждому устройству.
Проблема: Прерывистый или неустойчивый шаговый двигатель или функция шагового привода.
Решение: Это самая распространенная причина сбоя и одна из самых трудных для обнаружения.Начните с проверки, чтобы убедиться, что все соединения между шаговым двигателем и шаговым приводом и контроллерами надежны.
Свидетельство обесцвечивания на клеммах / соединениях может указывать на слабое соединение. При замене шагового двигателя, шагового драйвера или пакета драйверов или контроллера в системе управления движением обязательно осмотрите все клеммные колодки и разъемы.
Проверить кабели / проводку на точность. Подсоедините проводку и соединения шагового двигателя к худшим условиям и проверьте их с помощью омметра.По возможности используйте экранированные кабели для проводки шагового двигателя.
Проблема: Провода шагового двигателя были отсоединены, когда водитель был включен.
Решение: Старайтесь не обслуживать шаговый двигатель, драйвер или контроллер при включенном питании, особенно в отношении соединений двигателя. Эта мера предосторожности обязательна как для водителя, так и для техника / установщика.
Проблема: Плохая производительность системы.
Решение: Проверьте, не слишком ли длинный провод / кабели.Держите провод / кабель к шаговому двигателю длиной менее 25 футов. В тех случаях, когда проводка от шагового двигателя до шагового привода превышает 25 футов, пожалуйста, обратитесь к производителю за инструкциями, так как, вероятно, потребуются устройства защиты от переходного напряжения.
Другая возможность заключается в том, что подводящие провода шагового двигателя имеют слишком маленький калибр. Не подбирайте проводные кабели в соответствии с калибровочными размерами подводящих проводов шагового двигателя. Это распространенная ошибка, поэтому мы рекомендуем использовать экранированный кабель для такой проводки.
Кроме того, проверьте возраст вашего шагового двигателя, так как со временем и использованием шаговые двигатели теряют часть своего магнетизма, что влияет на производительность.
Обычно можно ожидать 10 000 рабочих часов для шаговых двигателей (примерно 4,8 года при одной восьмичасовой смене в течение рабочего дня).
Также убедитесь, что комбинация вашего шагового двигателя и привода хорошо подходит для вашего применения. Свяжитесь с заводом, если у вас есть какие-либо проблемы.
Проблема: Шаговый двигатель имеет короткую обмотку или короткое замыкание на корпусе двигателя.
Решение: Вероятно, у вас неисправный шаговый двигатель. Не пытайтесь ремонтировать моторы. Открытие корпуса шагового двигателя может привести к размагничиванию двигателя, что приведет к снижению производительности.
Открытие корпуса шагового двигателя также аннулирует вашу гарантию. Обмотки двигателя могут быть проверены с помощью омметра.
Проблема: Драйвер шагового двигателя или пакет драйверов перегрелся.
Решение: Жилые помещения с вентиляцией и охлаждением имеют важное значение – неспособность обеспечить достаточный поток воздуха повлияет на производительность привода шагового двигателя и сократит срок службы водителя. Поддерживайте температуру водителя ниже 60 градусов по Цельсию.
Для поддержания хорошего воздушного потока используйте вентиляторы, теплоотводящие материалы и опорные плиты, чтобы не превышать максимальную температурную характеристику шаговых двигателей, драйверов или контроллеров. Помните о температуре внутри шкафов и шкафов, где могут быть установлены шаговые драйверы.
Примечание: Окрашенные поверхности делают , а не хорошими теплоотводами для драйверов и контроллеров шаговых двигателей. Также убедитесь, что в окружающей среде нет пыли и мусора, которые могут забить систему с вентилятором.
Проблема: Факторы окружающей среды не идеальны.
Решение: Факторы окружающей среды, такие как сварка, пары химических веществ, влажность, влажность, пыль, металлический мусор и т. Д., Могут повредить как электронику, так и шаговый двигатель.
Защитите драйверы, контроллеры и шаговые двигатели от агрессивных сред, содержащих скачки напряжения или препятствующих хорошей вентиляции.
Для двигателей с промывкой или взрывозащищенным контактом обращайтесь непосредственно к производителю.Для линий переменного тока, которые содержат скачки напряжения, скорее всего, потребуется регулятор линии (фильтр).
Примечание: Если ваше применение требует сварки или если сварка выполняется в той же рабочей среде, обратитесь на завод-изготовитель за советом о том, как защитить драйвер и контроллер шагового двигателя.
Проблема: Частота пульса (часы или шаг) для водителя слишком высока.
Решение: Типичный полушаговый привод может управлять шаговым двигателем с максимальной скоростью 20 000 импульсов в секунду.Частота пульса выше 60 000 импульсов в секунду может повредить водитель.
См. Отдельные листы спецификаций для комбинации двигателя и привода для лучшей производительности.
Проблема: Шаговый двигатель глохнет.
Решение: В некоторых случаях остановка шагового двигателя вызывает большой скачок напряжения, который часто повреждает фазовые транзисторы на драйвере.
Некоторые драйверы предназначены для защиты себя от такого происшествия. Если нет, устройства подавления переходных процессов могут быть добавлены извне.Обратитесь к производителю за дополнительной информацией.
Проблема: Шаговый двигатель работает задним ходом.
Решение: Шаговый двигатель, который вращается под нагрузкой, создает напряжение обратной ЭДС на приводе. Чем выше скорость, тем выше уровень напряжения.
Если скорость вращения становится очень высокой, это напряжение может привести к повреждению водителя. Это особенно опасно, когда двигатель работает задним ходом, когда водитель еще включен. Поместите механический упор или тормоз в приложения, которые могут быть подвержены этим явлениям.
Общие соображения безопасности при использовании шаговых двигателей
На всех этапах эксплуатации, обслуживания и ремонта необходимо соблюдать следующие правила техники безопасности. Несоблюдение этих мер предосторожности нарушает стандарты безопасности при проектировании, изготовлении и предполагаемом использовании шагового двигателя, привода и контроллера.
Меры предосторожности должны соблюдаться пользователем в отношении нагрузки и рабочей среды.
Вкратце:
- Соблюдайте осторожность при работе, тестировании и настройке во время установки, наладки и эксплуатации
- Не следует проводить обслуживание при включенном питании. контакт человека с цепями под напряжением
- Все устройства должны быть надежно закреплены и надлежащим образом заземлены.
- Обеспечить достаточный воздушный поток и рассеивание тепла.
- Запрещается эксплуатировать в присутствии легковоспламеняющихся газов, паров, жидкостей или пыли. ,
Больше новостей
