
маленький контроллер для «умного дома» / Habr
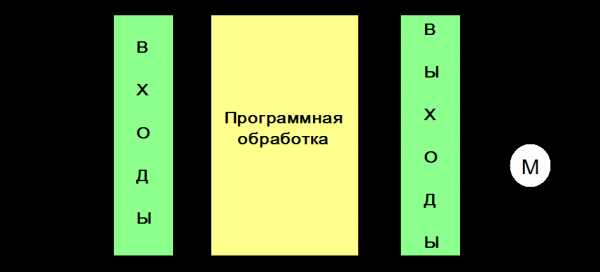
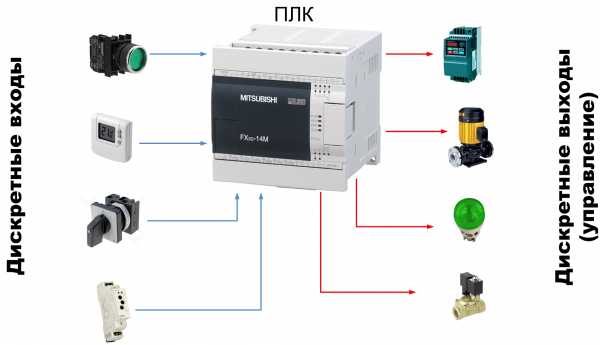
Я занимаюсь разработкой программ для программируемых логических контроллеров(ПЛК) в промышленных автоматизированных системах управления технологическими процессами(АСУ ТП).Для тех, кто сталкивается с этим словом впервые, поясню. ПЛК это специальный мини-компьютер, который работает так:
1. Принимает входные дискретные (Di) или аналоговые (Ai) сигналы;
2. Обрабатывает эти сигналы по заданной программистом программе;
3. Выдает управляющий сигнал через дискретные (DO) или аналоговые (AO) выхода.
Дискретный — когда у сигнала может быть только 2 состояния: 0 или 1, «да» или «нет». Например, кнопка нажата или отжата, лампочка включена или выключена.
Аналоговый — когда значение параметра зависит от уровня электрического сигнала. Например, чем выше уровень сигнала (вольт или миллиампер) от датчика температуры, тем больше измеряемая температура.
Применяются ПЛК в основном в промышленности, станках, системах домашней автоматизации «умный дом» и т.д.
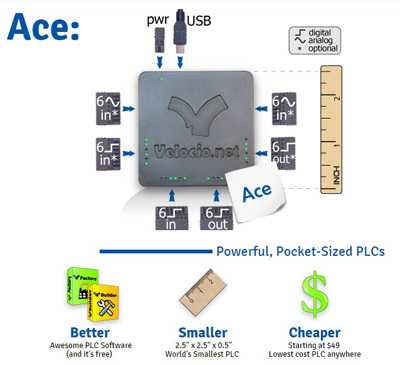
Естественно, в силу профессии меня интересует все, что касается ПЛК и другого оборудования, применяемого в АСУ ТП. Как-то, бродя по сети, я зашел на сайт американской компании Velocio, которая производит ПЛК серий Ace, Branch, Embeded.
Главные фишки этих контроллеров — маленький размер, всего 2.5” x 2.5”, питание 5 вольт и цена от 49$ за модель с 6 дискретными входами и 6 дискретными выходами. Особенно впечатлил размер, такого маленького ПЛК я еще не встречал:
ПЛК меня заинтересовал, я связался с компанией Velocio и мне прислали контроллер модели Ace 3090v5. Хотелось бы вкратце рассказать об этом ПЛК и более широкой аудитории Хабра. Забегая вперед скажу, что ПЛК компании Velocio лучше всего подходят для «умных домов» и прочих систем домашней автоматизации.
Вот ко мне пришла посылочка с контроллером прям из города Хантсвилл, штат Алабама:

Состав посылки:
1. ПЛК Velocio Ace 3090v5, $179
2. Крепление на DIN-рейку, $5
3. Коннекторы сигнальных линий (3,4,8 pin, шаг 2.5 мм), 6 шт., $6*3
4. Отвертка плоская, жало 1.5 мм, бесплатно
5. Коннектор питания (2 pin, шаг 2.5 мм), $2
6. Кабель USB Am-miniB, $5
Кабель USB для программирования Ace не обязательно покупать в Velocio, это обычный кабель USB Am-miniB, который продается в любом компьютерном магазине. Коннекторы тоже можно поискать в другом месте, но крепление на DIN-рейку уникально и его нужно покупать вместе с контроллером.
Ожидания Ace 3090v5 оправдал, он действительно очень маленький:

Характеристики:
| Название | Velocio Ace 3090v5 | |
| Назначение | ПЛК для домашней и промышленной автоматизации | |
| Кол-во DI | 6 | |
| Кол-во DO | 18, транзисторные | |
| AI | Кол-во, всего | 7 |
| Кол-во AI 16 бит/ тип | 4/ Термопары J, K, T, N; ±0.256 V, ±0.512 V, ±1.024 V, ±2.048 V |
|
| Кол-во AI 12 бит/ тип | 3/ 0…+5 V | |
| Порты связи | Mini USB(может работать по Modbus), RS-232 | |
| Протоколы передачи данных | Modbus RTU slave | |
| Скорость передачи данных, bps | 9600, 19200, 38400, 57600 | |
| Крепление | DIN-рейка | |
| Питание | 5 V DC | |
| Габариты | 63.5х63.5х12.7 мм | |
| Температура эксплуатации | -40… 85°С | |
| Степень защиты IP | IP65 | |
| Среда программирования | Velocio vBuilder, бесплатная | |
| Цена | 179 $ | |
Конструкция
При своих размерах, контроллер в общей сумме имеет 31 вход и выход, порт последовательной связи RS-232 и порт Mini USB для загрузки программ и связи с внешними устройствами.
Спереди на корпусе видны светодиоды индикации питания и состояния дискретных входов и выходов:
Сзади на корпусе имеются выемки для монтажа крепления на DIN-рейку:

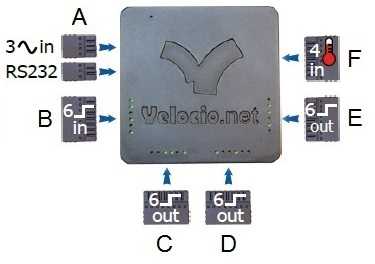
На боковых стенках корпуса находятся порты для подключения всех сигналов через разъемы. Порты маркируются литерами A, B, C, D, E, F:
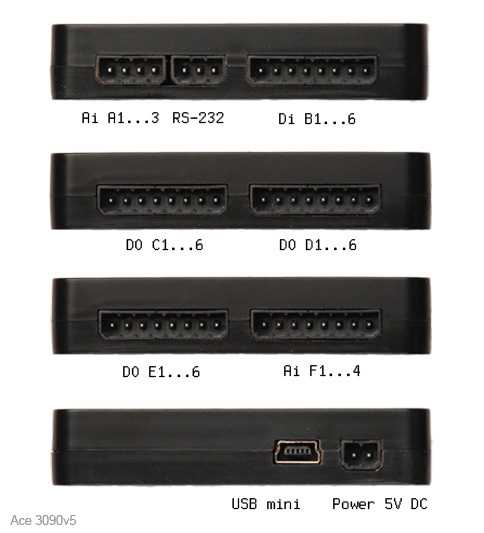
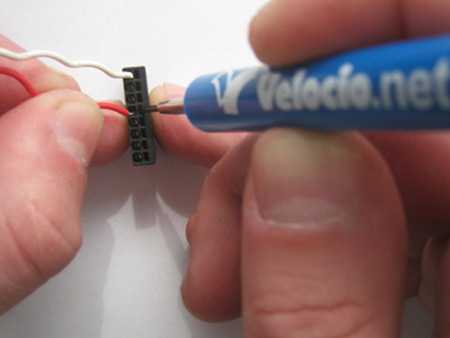
Подключение проводов происходит через коннекторы COMBICON PTSM Series фирмы Phoenix Contact с шагом ножек 2.5 мм (0.098”):

Вставляются провода в коннектор с помощью идущей в комплекте с ПЛК отверткой так:
Дискретные выхода- транзисторные, на то есть такие причины:
- реле в корпус контроллера все равно не поместится
- для обеспечения большого быстродействия, например при управлении шаговыми двигателями
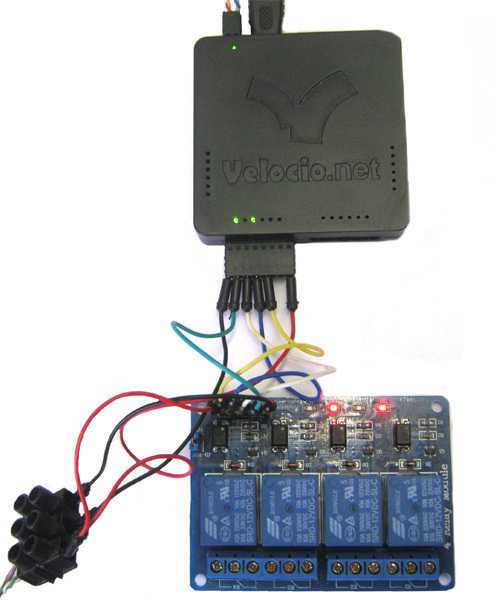
Естественно, для коммутации электрической сети 220 В транзисторные выхода не подходят и нужно после них ставить промежуточные реле. Можно купить модули с промежуточными реле там же у Velocio, при покупке ПЛК. А можно сэкономить и купить на ебее аналогичные китайские платы, как сделал я:
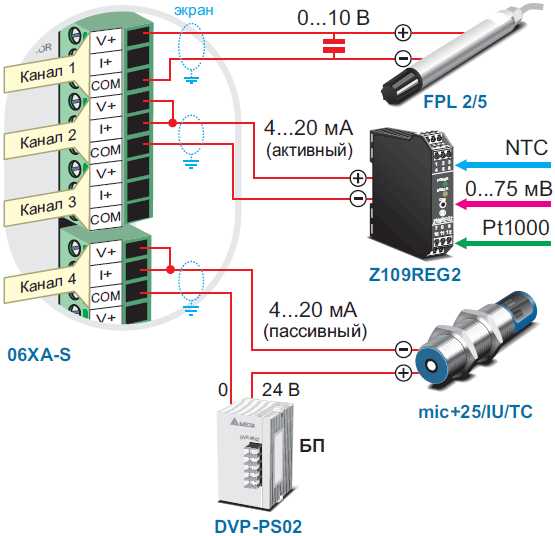
Аналоговые входа (Ai) в Ace 3090v5 разделены на 2 группы:
- 3 Ai с общей землей в порту A, диапазон входных сигналов 0… 5 V
- 4 Ai дифференциальных в порту F, подключение датчиков температуры(термопар) типа J, K, T, N, а так же милливольтных сигналов
Вот я подключил на вход Ai F1 термопару типа «К» от китайского тестера и вывел значение температуры на ноутбук:
Кстати, в этом примере я термопару в контроллере не калибровал. Тем не менее, показания температуры соответствовали значениям спиртового градусника, который выступал у меня в роли контрольного прибора.
Программирование
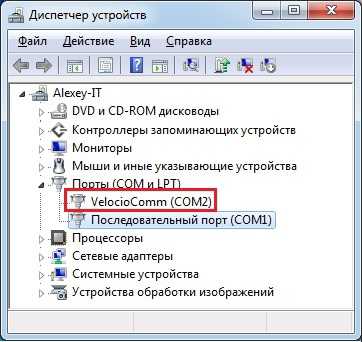
Разработка программ осуществляется через бесплатную среду программирования vBuilder. В пакете установки находится так же драйвер виртуального COM-порта, необходимый для подключения контроллера к компьютеру:
Изучение vBuilder лучше начать с просмотра видеоуроков. Есть так же полная документация на английском языке под названием «vBuilder Manual» в несколько сотен страниц.
Разработка программ возможна на двух графических языках: языке релейной логики(Ladder Logic) и языке блок-схем(Flow Chart).
Язык релейной логики (Ladder Logic) это хорошо известный всем программистам ПЛК язык LD, который является одним из стандартизированных по стандарту IEC 61131-3 промышленным языком.
LD придумали специально для того, что бы на нем писали программы не только программисты, но и обычные электрики. Программа на LD и выглядит, как электрическая схема:
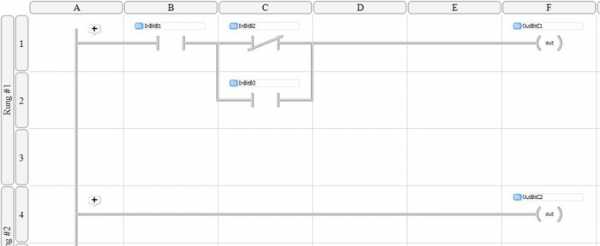
Это легкий для изучения и работы язык.
Язык блок-схем (Flow Chart) это графический язык, на котором программа создается в виде блок-схем:
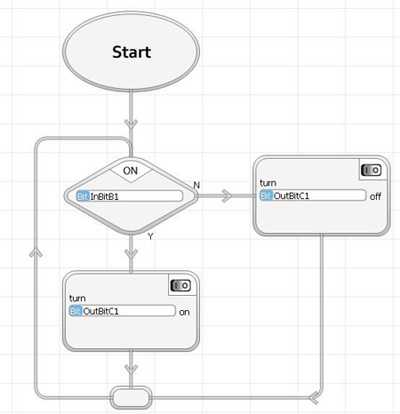
Блок-схемы и принципы их построения многие помнят еще со времен информатики в школе. Например, я закончил 11 класс в 1999 году, в мрачные времена постсоветского компьютерного средневековья. Тогда фирма «Интел» уже торговала процессорами Pentium-II, Билл Гейтс продавал Windows 98, а в нашей школе стояли советские компы «Электроника» с черно-белыми экранами. Большую часть урока мы сидели за партой и рисовали программы в тетрадях именно блок-схемами. Потом переводили их на бейсик, садились за «Электронику» (по 4 человека на машину) и уже после вводили в компьютер. А в других школах вообще компьютеров не было.
Так что для начинающих язык Flow Chart даже легче, чем LD. При этом, по моему мнению, он нагляднее и позволяет создавать более сложные программы. Кстати, блок-схемы я часто использую и сейчас, работая с различными ПЛК. Когда мне нужно продумать какой-нибудь сложный алгоритм, я сначала рисую блок-схемы на листике, а потом уже перевожу их в программу на конкретном языке.
В обоих языках программирования доступны одни и те же программные блоки:
- сравнение(<, >,= и др.)
- присваивание с возможностью ввода формул
- копирование
- счетчик
- таймер
- часы реального времени
- цифровой фильтр
- чтение энкодеров
- управление шаговым двигателем
- ПИД-регулятор
- ШИМ
- плавный пуск/останов
- масштабирование
- побитовый сдвиг и «переворот» числа
- статистика
- управление com-портом для реализации собственных протоколов передачи данных
- вызов подпрограмм
В качестве «быстрого хэлпа» по программным блокам используется та же страница загрузки vBulder. Просто жмешь по пиктограммам соответствующих блоков vBuilder справа на странице и читаешь, как они работают:
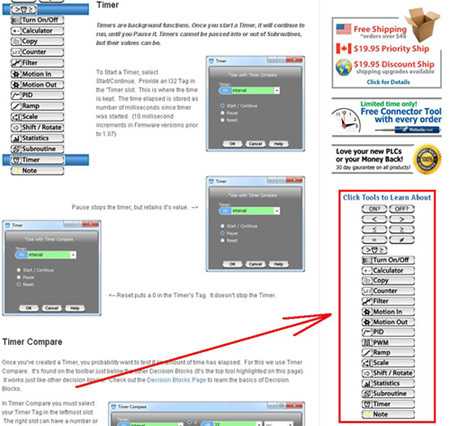
Если с английским совсем туго, на помощь придет переводчик браузера Ghrome: правая кнопка мыши-> перевести на русский. Перевод технический, но смысл будет понятен.
Доступные возможности при программировании:
- создание собственных переменных (тэгов) типа bit, unsigned int 8/16 bit, signed int 16/32 bit, float;
- создание массивов;
- создание подпрограмм;
- причем, подпрограммы здесь это объекты по типу FB как в Step-7 и Codesys;
- cвязь по Modbus с ПК, сенсорными панелями и др. по Modbus в режиме slave; возможно подключение по Modbus к 2-м мастер-устройствам одновременно;
- возможность реализовывать собственные протоколы передачи данных по RS-232;
- отладка программы по шагам.
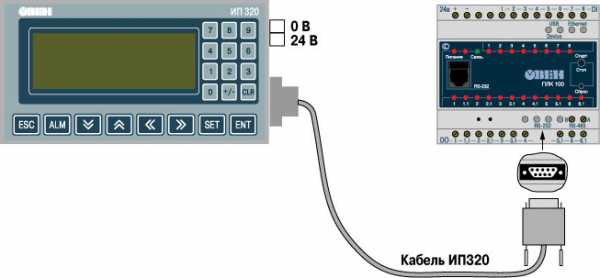
Подключение Ace к компьютеру и сенсорным панелям
Для связи с внешними устройствами по сети в Ace 3090v5 имеется 2 порта: RS-232 и USB. Оба этих порта могут передавать данные по протоколу Modbus RTU slave. Одновременно к Ace могут быть подключены 2 мастер устройства. Например, компьютер по USB, а сенсорная панель по RS-232. Для управления с компьютера применяются специальные программы типа SCADA, но можно и на каком-нибудь визуал бейсике программу написать.
RS-232 это старый добрый COM-порт компьютера. Раньше в него мыши подключались. Для подключения компьютера к Ace я и нашел старую комовскую мышь с шариком, отрезал от нее хвост и подключил его к 3-пиновому разъему RS-232 Aсe вот по такой схеме:
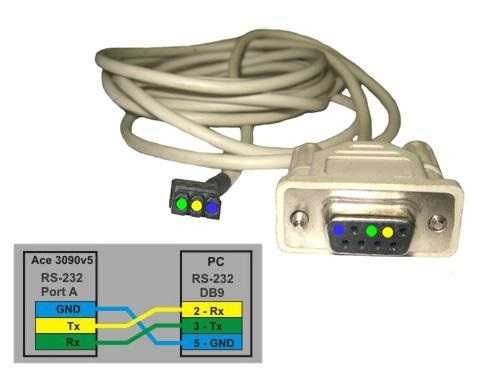
Если в компьютере нет COM-порта, нужно купить любой преобразователь USB/RS-232 по цене около $8.
Варианты реализации обмена данными Ace с внешними устройствами:
- по внутреннему протоколу Ace для связи с компьютером, на котором установлена бесплатная SCADA vFactory;
- по универсальному протоколу передачи данных Modbus RTU для связи с компьютерами, сенсорными панелями и другими ПЛК;
- по собственному протоколу, реализованному программным путем в контроллере.
Бесплатная СКАДА vFactory работает только с ПЛК компании Velocio, потому что использует не Modbus, а внутренний закрытый протокол контроллеров. Документации на vFactory нет, чтобы ей овладеть, достаточно одного видеоурока. Очень простая СКАДА без скриптового языка и возможности ведения архивов. Панель инструментов невелика:
Зато, можно быстро сделать работающую программу без особых навыков программирования: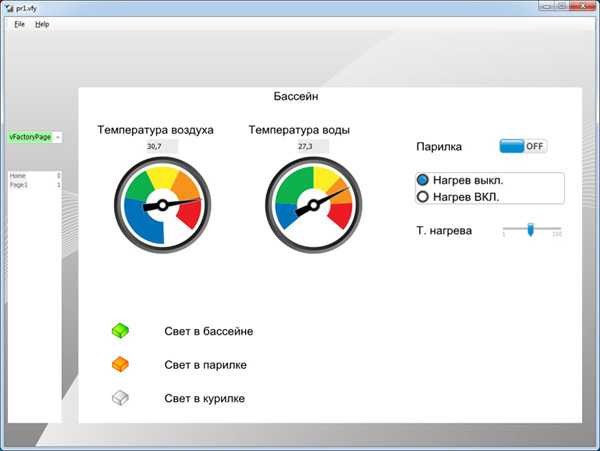
Если возможностей vFactory маловато, можно подключить по протоколу Modbus RTU любую другую SCADA. Например, в ролике с термопарой, я применил SCADA Trace Mode 6 Base.
Можно в Ace запрограммировать и собственный протокол передачи данных, этому посвящен отдельный видоурок.
ПЛК Ace в домашней автоматизации
Думаю, этот контроллер хорошо себя покажет в системе «умный дом». Плюсы контроллера: маленький размер, малое энергопотребление, питание всего от 5 В, множество дискретных выходов, возможность подключения термопар, 2 порта связи с внешними устройствами, легкость программирования, большое количество разных программных блоков.
Если контроллер Ace понравился, но 6 дискретных входов маловато, можно присмотреться к серии Branch — тот же Ace, только с возможностью подключения модулей расширения (до 450 входов/выходов). Впрочем, это уже без меня — мне пока хватит поиграться Ace.
habr.com
12.Понятие программируемого логического контроллера (плк).
Любая машина, способная автоматически выполнять некоторые операции, имеет в своем составе контроллер (англ.управляющий) —модуль, обеспечивающий логику работы устройства. Контроллер — это мозг машины. Естественно, чем сложнее логика работы машины, тем «умнее» должен быть контроллер.
Технически контроллеры реализуются по-разному. Это может быть механическое устройство, пневматический или гидравлический автомат, релейная или электронная схема или даже компьютерная программа. Контроллеры, выполненные на основе реле или микросхем с «жесткой» логикой, невозможно научить делать другую работу без существенной переделки. Очевидно, что такой возможностью обладают только программируемые логические контроллеры (ПЛК).Идея создания ПЛК родилась практически сразу с появлением микропроцессора, т. е. более 30 лет назад.
П рограммируемый
логический контроллер, ПЛК —микропроцессорное устройство,
предназначенное для управления
технологическими процессами в
промышленности и другими сложными
технологическими объектами. Принцип
работы ПЛК заключается в сборе сигналов
от датчиков и их обработке по прикладной
программе пользователя с выдачей
управляющих сигналов на исполнительные
устройства.
рограммируемый
логический контроллер, ПЛК —микропроцессорное устройство,
предназначенное для управления
технологическими процессами в
промышленности и другими сложными
технологическими объектами. Принцип
работы ПЛК заключается в сборе сигналов
от датчиков и их обработке по прикладной
программе пользователя с выдачей
управляющих сигналов на исполнительные
устройства.
Физически, типичный ПЛК представляет собой блок, имеющий определенный набор выходов и входов, для подключения датчиков и исполнительных механизмов.
Программируемый контроллер — это программно управляемый дискретный автомат, имеющий некоторое множество входов, подключенных посредством датчиков к объекту управления, и множество выходов, подключенных к исполнительным устройствам. ПЛК контролирует состояния входов и вырабатывает определенные последовательности программно заданных действий, отражающихся в изменении выходов. ПЛК предназначен для работы в режиме реального времени в условиях промышленной среды и должен быть доступен для программирования неспециалистом в области информатики.
Изначально ПЛК предназначались для управления последовательными логическими процессами, что и обусловило слово «логический» в названии ПЛК. Современные ПЛК помимо простых логических операций способны выполнять цифровую обработку сигналов, управление приводами, регулирование, функции операторского управления и т. д.
13.Место плк в системе управления.
Основные функции, выполняемые ПЛК в системах управления это управление, защита, измерение физических сигналов, отображение и регистрация технологических процессов. ПЛК является основным функциональным элементом современных АСУ ТП.
На заре своего появления ПЛК имели только бинарные входы, т. е. входы, значения сигналов на которых способны принимать только два состояния — логического нуля и логической единицы. Так, наличие тока (или напряжения) в цепи входа считается обычно логической единицей. Отсутствие тока (напряжения) означает логический ноль. Датчиками, формирующими такой сигнал, являются кнопки ручного управления, концевые датчики, датчики движения, контактные термометры и многие другие.
Бинарный выход также имеет два состояния — включен и выключен. Сфера применения бинарных выходов очевидна: электромагнитные реле, силовые пускатели, электромагнитные клапаны, световые сигнализаторы и т.д.
В современных ПЛК широко используются аналоговые входы и выходы. Аналоговый илинепрерывный сигнал отражает уровень напряжения или тока, соответствующий некоторой физической величине в каждый момент времени. Этот уровень может относиться к температуре, давлению, весу, положению, скорости, частоте и т.д., словом, к любой физической величине.
Аналоговые входы контроллеров могут иметь различные параметры и возможности. Так, к их параметрам относятся: разрядность АЦП, диапазон входного сигнала, время и метод преобразования, несимметричный или дифференциальный вход, уровень шума и нелинейность, возможность автоматической калибровки, программная или аппаратная регулировка коэффициента усиления, фильтрация.
Особые классы аналоговых входов представляют входы, предназначенные для подключения термометров сопротивления и термопар. Здесь требуется применение специальной аппаратной поддержки (трехточечное включение, источники образцового тока, схемы компенсации холодного спая, и т. д.).
В сфере применения ПЛК бинарные входы и выходы называют обычно дискретными. Хотя, конечно, это не точно. Аналоговые сигналы в ПЛК обязательно преобразуются в цифровую, т. е. заведомо дискретную форму представления. Но в технических документах ПЛК любой фирмы вы встретите именно указание количества дискретных и аналоговых входов. Поэтому и далее мы сохраним устоявшуюся здесь терминологию.
Помимо «классических» дискретных и аналоговых входов-выходов многие ПЛК имеют специализированные входы-выходы. Они ориентированы на работу с конкретными специфическими датчиками, требующими определенных уровней сигналов, питания и специальной обработки. Например, блоки управления шаговыми двигателями, интерфейсы дисплейных модулей и т. д.
Входы-выходы ПЛК не обязательно должны быть физически сосредоточены в общем корпусе с процессорным ядром. В последние годы все большую популярность приобретают технические решения, позволяющие полностью отказаться от прокладки кабелей для аналоговых цепей. Входы-выходы выполняются в виде миниатюрных модулей, расположенных в непосредственной близости от датчиков и исполнительных механизмов. Соединение подсистемы ввода-вывода с ПЛК выполняется посредством одного общего цифрового кабеля (промышленной сети).
studfile.net
Программируемый логический контроллер — Википедия
Модульный программируемый логический контроллерПрограмми́руемый логи́ческий контро́ллер (сокр. ПЛК; англ. programmable logic controller, сокр. PLC; более точный перевод на русский — контроллер с программируемой логикой), программируемый контроллер — специальная разновидность электронной вычислительной машины. Чаще всего ПЛК используют для автоматизации технологических процессов. В качестве основного режима работы ПЛК выступает его длительное автономное использование, зачастую в неблагоприятных условиях окружающей среды, без серьёзного обслуживания и практически без вмешательства человека.
Иногда на ПЛК строятся системы числового программного управления станков.
ПЛК — устройства, предназначенные для работы в системах реального времени.
ПЛК имеют ряд особенностей, отличающих их от прочих электронных приборов, применяемых в промышленности:
- в отличие от микроконтроллера (однокристального компьютера) — микросхемы, предназначенной для управления электронными устройствами — ПЛК являются самостоятельным устройством, а не отдельной микросхемой.
- в отличие от компьютеров, ориентированных на принятие решений и управление оператором, ПЛК ориентированы на работу с машинами через развитый ввод сигналов датчиков и вывод сигналов на исполнительные механизмы;
- в отличие от встраиваемых систем ПЛК изготавливаются как самостоятельные изделия, отдельные от управляемого при его помощи оборудования.
В системах управления технологическими объектами логические команды, как правило, преобладают над арифметическими операциями над числами с плавающей точкой, что позволяет при сравнительной простоте микроконтроллера (шины шириной 8 или 16 разрядов), получить мощные системы, действующие в режиме реального времени. В современных ПЛК числовые операции в языках их программирования реализуются наравне с логическими. Все языки программирования ПЛК имеют лёгкий доступ к манипулированию битами в машинных словах, в отличие от большинства высокоуровневых языков программирования современных компьютеров.
История
Первые логические контроллеры появились в виде шкафов с набором соединённых между собой реле и контактов. Эта схема не могла быть изменена после этапа проектирования и поэтому получила название — жёсткая логика. Первым в мире, программируемым логическим контроллером, в 1968 году стал Modicon 084 (1968) (от англ. modular digital controller), имевший 4 кБ памяти.
Термин PLC ввел Odo Josef Struger (Allen-Bradley) в 1971 году. Он также сыграл ключевую роль в унификации языков программирования ПЛК и принятии стандарта IEC61131-3. Вместе с Richard Morley (Modicon) их называют ‘отцами ПЛК’. Параллельно с термином ПЛК в 1970-е годы широко использовался термин микропроцессорный командоаппарат.
В первых ПЛК, пришедших на замену релейным логическим контроллерам, логика работы программировалась схемой соединений LD. Устройство имело тот же принцип работы, но реле и контакты (кроме входных и выходных) были виртуальными, то есть существовали в виде программы, выполняемой микроконтроллером ПЛК. Современные ПЛК являются свободно программируемыми.
Виды ПЛК
Устройство ПЛК
Часто ПЛК состоит из следующих частей:
- центральная микросхема (микроконтроллер, или микросхема FPGA), с необходимой обвязкой;
- подсистема часов реального времени;
- энергонезависимую память;
- интерфейсы последовательного ввода-вывода (RS-485, RS-232, Ethernet)
- схемы защиты и преобразования напряжений на входах и выходах ПЛК.
Обычно вход или выход ПЛК нельзя сразу же подключить к соответствующему выходу центральной микросхемы. Эти выходы характеризуются низкими уровнями напряжений, обычно от 3,3 до 5 вольт. Входы и выходы ПЛК обычно должны работать с напряжениями 24 В постоянного либо 220 В переменного тока. Поэтому между выходом ПЛК и выходом микросхемы необходимо предусматривать усилительные и защитные элементы.
Структуры систем управления
- Централизованная: в корзину ПЛК устанавливаются модули ввода-вывода. Датчики и исполнительные устройства подключаются отдельными проводами непосредственно, либо при помощи модулей согласования к входам/выходам сигнальных модулей;
- Распределенная: удалённые от ПЛК датчики и исполнительные устройства связаны с ПЛК посредством каналов связи и, возможно, корзин-расширителей с использованием связей типа «ведущий-ведомый» (англ. Master-Slave).
Интерфейсы ПЛК
Удаленное управление и мониторинг
Языки программирования ПЛК
Для программирования ПЛК используются стандартизированные языки МЭК (IEC) стандарта IEC61131-3
Языки программирования (графические)
- LD (Ladder Diagram) — Язык релейных схем — самый распространённый язык для PLC
- FBD (Function Block Diagram) — Язык функциональных блоков — 2-й по распространённости язык для PLC
- SFC (Sequential Function Chart) — Язык диаграмм состояний — используется для программирования автоматов
- CFC (Continuous Function Chart) — Не сертифицирован IEC61131-3, дальнейшее развитие FBD
Языки программирования (текстовые)
- IL (Instruction List) — Ассемблеро-подобный язык
- ST (Structured Text) — Паскале-подобный язык
- C-YART — Си-подобный язык (YART Studio)
Структурно в IEC61131-3 среда исполнения представляет собой набор ресурсов (в большинстве случаев это и есть ПЛК, хотя некоторые мощные компьютеры под управлением многозадачных ОС представляют возможность запустить несколько программ типа softPLC и имитировать на одном ЦП несколько ресурсов). Ресурс предоставляет возможность исполнять задачи. Задачи представляют собой набор программ. Задачи могут вызываться циклически, по событию, с максимальной частотой.
Программа — это один из типов программных модулей POU. Модули (POU) могут быть типа программа, функциональный блок и функция. В некоторых случаях для программирования ПЛК используются нестандартные языки, например: Блок-схемы алгоритмов С-ориентированная среда разработки программ для ПЛК. HiGraph 7 — язык управления на основе графа состояний системы.
Инструменты программирования ПЛК на языках МЭК 61131-3 могут быть специализированными для отдельного семейства ПЛК или универсальными, работающими с несколькими (но далеко не всеми) типами контроллеров:
Программирование ПЛК
- Конфигурируемые: В ПЛК хранится несколько программ, а через клавиатуру ПЛК выбирается нужная версия программы;
- Свободно программируемые: программа загружается в ПЛК через его специальный интерфейс с Персонального компьютера используя специальное ПО производителя, иногда с помощью программатора.
Программирование ПЛК имеет отличие от традиционного программирования. Это связано с тем, что ПЛК исполняют бесконечную последовательность программных циклов, в каждом из которых:
- считывание входных сигналов, в том числе манипуляций, например, на клавиатуре оператором;
- вычисления выходных сигналов и проверка логических условий;
- выдача управляющих сигналов и при необходимости управление индикаторами интерфейса оператора.
Поэтому при программировании ПЛК используются флаги – булевые переменные признаков прохождения алгоритмом программы тех или иных ветвей условных переходов. Отсюда, при программировании ПЛК от программиста требуется определённый навык.
Например, процедуры начальной инициализации системы после сброса или включения питания. Эти процедуры нужно исполнять только однократно. Поэтому вводят булевую переменную (флаг) завершения инициализации, устанавливаемую при завершении инициализации. Программа анализирует этот флаг, и если он установлен, то обходит исполнение кода процедур инициализации.
См. также
Литература
- Мишель Ж. Программируемые контроллеры: архитектура и применение. — М.: Машиностроение, 1986
- Э. Парр. Программируемые контроллеры: руководство для инженера. — М.: БИНОМ. Лаборатория знаний, 2007. — 516 с. ISBN 978-5-94774-340-1
- Петров И. В. Программируемые контроллеры. Стандартные языки и приемы прикладного проектирования / Под ред. проф. В. П. Дьяконова. — М.: СОЛОН-Пресс, 2004. — 256 c. ISBN 5-98003-079-4
- Денисенко В. В. Компьютерное управление технологическим процессом, экспериментом, оборудованием. — М: Горячая Линия-Телеком, 2009. — 608 с. ISBN 978-5-9912-0060-8
- Минаев И. Г. Программируемые логические контроллеры. Практическое руководство для начинающего инженера. /И. Г. Минаев, В. В. Самойленко — Ставрополь: АГРУС, 2009. — 100 с. ISBN 978-5-9596-0609-1
- Минаев И. Г. Программируемые логические контроллеры в автоматизированных системах управления / И. Г. Минаев, В. М. Шарапов, В. В. Самойленко, Д. Г. Ушкур. 2-е изд., перераб. и доп. — Ставрополь: АГРУС, 2010. — 128 с. ISBN 978-5-9596-0670-1
- О. А. Андрюшенко, В. А. Водичев. Электронные программируемые реле серий EASY и MFD-Titan. — 2-е изд., испр. — Одесса: Одесский национальный политехнический университет, 2006. — С. 223.
- Минаев И.Г. Свободно программируемые устройства в автоматизированных системах управления / И.Г. Минаев, В.В. Самойленко, Д.Г. Ушкур, И.В. Федоренко – Ставрополь: АГРУС. 2016. – 168 с. ISBN 978-5-9596-1222-1
Примечания
Ссылки
wikipedia.green
Промышленные контроллеры (ПЛК) | LAZY SMART

Современную промышленность невозможно представить без систем автоматизации. Сложность производственных процессов делает невозможным управление ими вручную, к тому же системы автоматики обходятся гораздо дешевле, чем обслуживающий персонал, да и работают они быстрее и надёжнее. Да что говорить о промышленности – в настоящее время практически ни одно здание не обходится без автоматики. Школы, больницы, детские сады, офисные и складские помещения, загородные дома и коттеджи – все эти объекты оснащены инженерными системами с автоматическим управлением. Несмотря на многообразие применений и сфер использования все системы автоматики работают по одному принципу и обладают схожей структурой, в центре которой находится «мозг» системы – программируемый логический контроллер (ПЛК).
С чего всё начиналось?
 Все начиналось с построения релейно-контактных систем управления, представляющих из себя огромные шкафы, набитые проводами и релейными модулями. В эти шкафы приходили сигналы от датчиков, а на выходе формировались команды исполнительным устройствам. Кроме того, что они были больших размеров, такие системы управления неудобны тем, что они совершенно не гибкие: для того, изменить логику управления, необходимо вручную перебирать всю электрическую схему. С развитием микропроцессорной техники на смену релейным шкафам пришли ПЛК – устройства, выполняющие те же функции, но имеющие принципиально другой механизм преобразования входных сигналов в выходные. Такое преобразование в ПЛК выполняется в соответствии с записанной программой. С появлением контроллеров размеры систем управления уменьшились в десятки раз, значительно упростился процесс их разработки и последующих изменений.
Все начиналось с построения релейно-контактных систем управления, представляющих из себя огромные шкафы, набитые проводами и релейными модулями. В эти шкафы приходили сигналы от датчиков, а на выходе формировались команды исполнительным устройствам. Кроме того, что они были больших размеров, такие системы управления неудобны тем, что они совершенно не гибкие: для того, изменить логику управления, необходимо вручную перебирать всю электрическую схему. С развитием микропроцессорной техники на смену релейным шкафам пришли ПЛК – устройства, выполняющие те же функции, но имеющие принципиально другой механизм преобразования входных сигналов в выходные. Такое преобразование в ПЛК выполняется в соответствии с записанной программой. С появлением контроллеров размеры систем управления уменьшились в десятки раз, значительно упростился процесс их разработки и последующих изменений.
Принцип работы ПЛК
ПЛК работает по циклическому принципу. В самом начале цикла ПЛК сканирует состояния входов, на которые поступают сигналы от датчиков и устройств. Затем в соответствии с алгоритмом программы происходит вычисление состояния выходов. В конце рабочего цикла контроллер устанавливает каждый выход в состояние, которое было определено.
1. Чтение состояний входов
2. Выполнение программы пользователя
3. Запись состояний выходов
Указанные этапы цикла выполняются последовательно – это означает, что изменения состояний входов не будут «замечены» контроллером во время выполнения программы. По этой причине одним из важнейших параметров ПЛК является время реакции. Если оно окажется больше, чем минимальный период изменения состояний входов, некоторые события, происходящие в системе, будут «пропущены» контроллером.
Также стоит учесть, что и датчики реагируют на изменения в системе не мгновенно. Поэтому полное время реакции системы управления складывается из времени реакции ПЛК и времени реакции датчиков.

Время реакции системы — время с момента изменения состояния системы до момента выработки соответствующей реакции (принятия решения).
Системы реального времени
Все системы можно условно разделить на системы жёсткого и мягкого реального времени.
В системах жёсткого реального времени реакция ПЛК не должна превышать определённый временной порог. При увеличении времени реакции система теряет свою работоспособность.
В системах мягкого реального времени при увеличении времени реакции может происходить сильное ухудшение качества управления, но работоспособность при этом не теряется.
Входы и выходы ПЛК
Дискретные входы – предназначены для ввода сигналов от дискретных датчиков (кнопки, тумблеры, концевые выключатели, термостаты и др.). Напряжение сигнала унифицировано для всех ПЛК и составляет 24 В. Проще говоря, при «появлении» на входе контроллера напряжение 24 В – ПЛК будет считать этот вход «включенным», то есть он примет значение логической «1» в восприятии контроллера.
Дискретные выходы – предназначены для управления устройствами по принципу «включить/выключить» (магнитные пускатели, лампочки, клапаны и др.). Дискретный выход – это обычный контакт, который может замкнуть или разомкнуть управляющую или питающую цепь устройства.
Аналоговые входы – предназначены для ввода непрерывного сигнала с датчиков и других устройств. Существует два основных вида унифицированных аналоговых сигналов: по току – 4..20 мА, по напряжению 0..10 В. Например, датчик температуры имеет диапазон -10 — +70 °С, тогда 4мА на выходе соответствует -10 °С, а 20мА – это +70 °С. С аналоговыми сигналом по напряжению всё аналогично.
Аналоговые выходы – предназначены для плавного управления устройствами. Унифицированные значения аналогового сигнала на выходах такое же, как и на входах – 4..20мА (0..10В). Например, вентиль может поворачиваться в пределах от 0° до 90°. Ток 4мА повернёт его в положение 0°, а 20мА – в положение 90°. Для того, чтобы повернуть его на 45°, нужно подать на него управляющий сигнал 8мА. Таким образом, меняя значение силы тока на выходе, контроллер может поворачивать вентиль на заданный угол.
Специализированные входы/выходы – не унифицированы, применяются для подключения нестандартных датчиков и исполнительных устройств со специфическим уровнем сигнала, питанием и программной обработкой.
Цифровые интерфейсы ПЛК
Изначально ПЛК предназначались для управления последовательными логическими процессами. Современные контроллеры помимо логических операций способны выполнять цифровую обработку сигналов. Они могут обмениваться информацией с другими устройствами, такими как панели оператора, GSM-модули, частотные преобразователи, серверы сбора данных и др.
ПЛК могут иметь распределённую структуру, когда модули входов и выходов находятся на значительном удалении от самого контроллера, вблизи объекта управления. Несколько ПЛК, управляющие разными частями одной системы, могут объединяться в сеть для обмена информаций и согласования управляющих действий, а так же передачи всей информации о системе в центральный диспетчерский пункт.
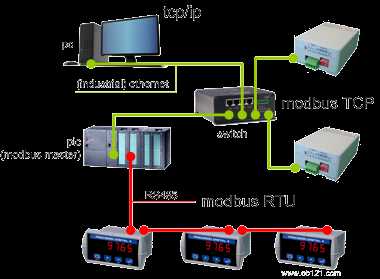
В этих случаях обмен удалённых модулей и устройствами с ПЛК осуществляется по цифровым интерфейсам с использованием специализированных протоколов, таких как Modbus RTU, ModBus TCP, CANopen, Profibus, EtherNet IP и других.
lazysmart.ru
Что такое программируемый логический контроллер и принцип его работы
Программируемый логический контроллер, по сути, является электронной составляющей частью промышленного контроллера и используется в системе автоматизации производства.
Задачей такого логического контроллера является сбор данных, их обработка и преобразование, сохранение в памяти необходимой информации, создание команд управления, которые поступают посредством входов и передаются посредством выходов. Входы и выходы подключаются к датчикам и ключам, к механизмам устройства управления.
Логические контроллеры осуществляют свою работу практически без участия оператора, что позволяет работать в режиме реального времени в жестких условиях эксплуатации, даже при наличии неблагоприятных условий окружающей среды.
На заре развития промышленной автоматики логические контроллеры были созданы по типу релейных схем с фиксированной логикой работы. При нарушении алгоритма приходилось основательно изменять действующую схему.
С внедрением и быстрым распространением микропроцессоров автоматика производственного процесса стала строиться на основе микропроцессоров. Однако роль логических контроллеров не перестала оставаться актуальной, они просто заняли свою отдельную нишу применения.
Сегодня релейные схемы оснащаются программным обеспечением, что превращает программируемые логические контроллеры в микропроцессорное устройство, обеспечивающее сбор информации, ее переработку, сохранение и передачу команд к узлам выполняющего устройства.
При этом ЛПК контроллер по принципу своей работы существенно отличается от микропроцессорных устройств, поскольку программное обеспечение ЛПК контроллера имеет две части, первой из которых является системное программное обеспечение. Оно функционирует по аналогии с компьютерной операционной системой и обеспечивает:
- управление внутренними узлами контроллера;
- взаимодействие составляющих компонентов;
- осуществление внутренней диагностики.
Системное обеспечение заключено в постоянную память процессора и вступает в работу через несколько миллисекунд после подключения ПЛК к сети.
ПЛК контроллер работает циклично, при этом каждый цикл сопровождается чтением данных и имеет 4 фазы:
- первая представляет собой опрос входов;
- на второй фазе осуществляется выполнение действий, установленных пользовательской программой;
- третья фаза устанавливает значения входов;
- на четвертой фазе производятся дополнительные операции, например, производится диагностика, подготавливаются данные для отладчика, визуализация.
Системное ПО осуществляет работу первой фазы. После опроса входов управление передается программе, находящейся в памяти. Это программа, созданная пользователем для решения определенных задач, содержит те действия, которые должны совершаться, после их выполнения управление передается на системный уровень. Простота схемы действий освобождает создателя программы от необходимости изучения системы аппаратного управления. Для создания программы инженеру достаточно владеть информацией о том, с какого входа поступает сигнал и как он должен откликаться на выход.
Время отклика на сигнал зависит от длительности одного цикла действующей программы.
Отличием ПЛК контроллеров от комбинационных аппаратов заключается в том, что они обладают памятью, что позволяет им реагировать на текущие события. Память также позволяет перепрограммировать, осуществлять управление во времени, производить цифровую обработку сигналов, что поднимает ЛПК контроллер на более совершенный уровень.
Входы и выходы
Программируемый логический контроллер может иметь входы трех типов. Это:
- аналоговый;
- дискретный;
- специальный.
Один дискретный вход принимает один бинарный электронный сигнал. При этом практически все стандартные входы принимают электрический сигнал мощностью 24 Вт, при типовом значении тока 10 мА.
Аналоговый вход обеспечивает прием аналогового сигнала, отражающего уровень напряжения или тока. При этом в каждый временной момент напряжение и ток соответствуют определенной физической величине: температуре, весу, давлению, положению, скорости, частоте и т.д.
Поскольку программируемые логические контроллеры представляют собой цифровую вычислительную технику, то аналоговые сигналы подвергаются преобразованию. Для осуществления преобразования аналогового сигнала в цифровой в программируемых логических контроллерах применяются 10-12-ти разрядные преобразователи. В условиях современного автоматизированного производства этого показателя достаточно для обеспечения точности управления техническим процессом. Применение преобразователей этого класса на производстве оправдано и тем, что преобразователи более высокой разрядности реагируют на индустриальные помехи, которые неизбежны в условиях, где работает контроллер.
Поскольку все аналоговые входы многоканальные, то приходится использовать коммутатор, посредством которого осуществляется подключение входа АЦП к требуемому модулю.
Таким образом, все аналоговые и дискретные входы обеспечивают потребности промышленной автоматики, поэтому необходимость в использовании специальных входов возникает крайне редко, и требуется при необходимости обработки отдельных сигналов с большими временными затратами, что обусловлено программным затруднением.
В основном, ПЛК со специализированными входами применяются там, где необходим подсчет импульсов, измерение длительности и фиксация фронтов.
Такой вход может быть использован там, где необходимо измерить скорость и положение вращения вала, поскольку такое устройство оснащено поворотными шифраторами, формирующими определенное количество импульсов, рассчитанных на каждый оборот вала. При этом частота импульсов очень высокая и равна нескольким мегагерцам. Даже если ПЛК оснащен быстродействующим процессором, подсчет импульсов будет занимать большое количество времени. В этом случае, использование специального входа будет оправдано, поскольку обеспечит обработку входных импульсов и формирование сигналов необходимой величины для реализации программы.
Другой тип специализированных входов — входы прерывания, они обеспечивают быстрый запуск пользовательских задач, которые необходимо выполнять при прерывании работы основной программы. Этот тип специализированных входов широко используется и является достаточно востребованным.
Классификация ПЛК по типу конструкции
По своей конструкции ПЛК могут быть:
- модульными, оснащающимися различным набором модулей входов и выходов, предусмотренных реализации конкретной задачи;
- моноблочными, оснащенными определенным количеством входов и выходов;
- распределительными, оснащенными модулями, отдельными входами и выходами, установка которых возможна на существенном расстоянии.
Языки программирования
Технологический язык дает возможность всем участникам процесса — инженерам, технологам и программистам, понимать суть задачи и находить ее решение. Так, если технолог дает установку на необходимые процессы, он не использует формализованный алгоритм процесса, вследствии чего программист, при создании программы, вынужден вникать в суть технологического процесса. В то же время, создавая программу, программист остается единственным участником процесса, понимающим язык программ.
В связи с этим, возникают сложности, для преодоления которых и был придуман технологический язык, одинаково понятный всем участникам процесса. Именно технологический язык позволил упростить процесс программирования.
Сегодня разработаны технологические языки, а также установлен стандарт МЭК-61131-3, который был разработан Международной Электротехнической Комиссией.
Все производители должны придерживаться установленного стандарта и предлагать устройства, оснащенные одинаковыми по интерфейсу и принципу действия командами.
Этот стандарт включает в себя 5 языков:
- языком функциональных релейных блоков является Sequential Function Chart;
- для функциональных блоковых диаграмм, предусмотрен язык Function Block Diagram;
- для релейных диаграмм, принят язык Ladder Diagrams;
- язык структурированного текста Statement List напоминает Паскаль;
- языком инструкций является Instruction List , он представляет собой ассемблер, оснащенный аккумулятором и переходом по метке.
LAD — это простой язык, напоминающий логическую схему реле, что позволяет любому инженеру составить программу. FBM похож на схему логических элементов, что также упрощает создание программ для инженеров.
Выбор языка, в основном, базируется на личном опыте программирующего инженера. При этом некоторые действия легко откликаются на один язык, создавая определенные трудности в другой области. Для решения таких задач создана возможность переконвертирования готовой программы с одного языка на другой.
Самыми распространенными сегодня языками программирования являются LAD, STL, FBD, которые наиболее часто предусмотрены производителями ЛПК самых известных компаний.
CoDeSys — программный комплекс
Введенный МЭК стандарт привел к необходимости создания инструментов программирования. Решение этой задачи взяли на себя некоторые компании, которые стали заниматься исключительно инструментами программирования.
Так, фирма 3S, разработала комплекс CoDeSys, который стал одним из самых популярных в мире. Он отвечает всем требованиям стандарта МЭК и обладает рядом преимуществ, среди них — встроенный эмулятор и встроенные элементы визуализации, наличие инструкции и документации на русском языке, а также возможность использования русскоязычной версии.
www.techtrends.ru
Программируемые логические контроллеры (ПЛК) – Control Engineering Russia
Различий в программном обеспечении гораздо больше, чем в аппаратных средствах, говорят респонденты. Участников проведенного опроса также интересуют сетевые возможности контроллеров
Мало приятного в том, что при разработке системы управления, в поиске необходимых компонентов приходится проводить много времени в кипе каталогов производителей или поставщиков. Даже сравнительно небольшая система управления требует большого количества выбранных, рекомендованных и заказанных элементов простейшей системы управления, особенно использующей стандартную релейную логику. Реле, базы реле, таймеры, конечные выключатели, провода, кабельные каналы, сигнальные лампы, кнопки и прочее. Последнее, но не менее важное – шкаф для установки оборудования. Это только часть того, что необходимо для начала проекта.
Используйте программируемый логический контроллер (ПЛК) или его преемника – программируемый контроллер автоматизации (PAC). Эти устройства совмещают функции множества других изделий и могут использоваться в большинстве разрабатываемых систем управления. Согласно опросу, проведенному Control Engineering в этом году, производители контроллеров предлагают инженерам автоматизации продукты, позволяющие работать проще и эффективнее при меньшей стоимости.
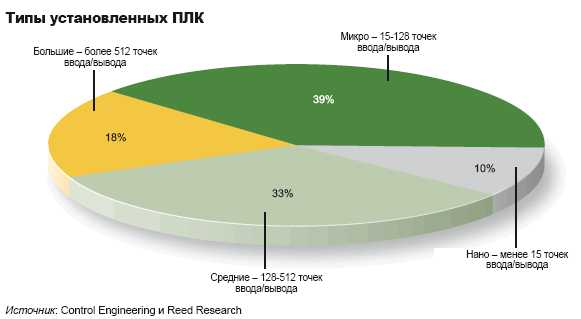
В последнем анкетировании, организованном совместно с Reed Research, 548 ответчиков заявили, что современный ПЛК вполне оправдывает их надежды. Из них 57 % используют ПЛК для собственного производства, и 22 % для OEM приложений. Оставшиеся 21 % приобретают и используют контроллеры для обоих приложений. Используемые ПЛК значительно различаются по количеству точек ввода/вывода. Классификация по типу контроллера, показывает, что инженеры управления используют главным образом микроПЛК – от 15 до 128 точек ввода/вывода, 38.7 % используемых контроллеров. PLC среднего размера, 128 – 512 точек ввода/вывода, применяется в 32.7 % случаев, большие ПЛК, более 512 точек ввода/ вывода – 18.4 %. Реже используются наноПЛК, менее 15 точек ввода/вывода, около 10.4 %. В целом, в диапазон от 15 до 512 точек попадают почти три четверти проданных приборов.
Как обстоят дела у возможного приемника ПЛК, программируемого контроллера автоматизации (PAC)? Согласно прошлогоднему обзору, 44 % пользователей рассматривали возможность использования этих высокозащищенных PC в форм-факторе ПЛК. Даже, несмотря на растущие возможности PAC, число инженеров, планирующих использовать эти устройства, снизилось до 31 %. По всей вероятности, инженеры управления хотели бы установить PAC на новых или модернизируемых установках. Из тех участников, которые планируют использовать это оборудование в будущем, большинство (75 %) будут применять их как дополнение к ПЛК. Остальные заменят ПЛК на PAC.
Сетевые опции
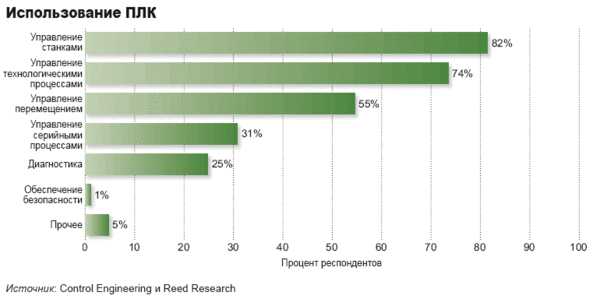
Сферы использования ПЛК в полной мере отражают отрасли применения систем автоматизации. Как и ожидалось, управление станками (82 %) все еще самая распространенная сфера применения. Управление процессом (74 %), управление движением (55 %), управление периодическими процессами (31 %), диагностические приложения (25 %). Реже всего PLC используются для обеспечения безопасности производства (1 %).
Методы коммуникации с другими системами управления являются главным показателем гибкости современного ПЛК. Как говорят участники, сетевые протоколы используются в 69 % установленных ПЛК, оставшиеся 31 % используются как автономные приборы. Большинство подключенных к сети контроллеров обменивается информацией с персональными компьютерами и PAC-контроллерами и столько же связано с другими ПЛК. Чуть больше 5 % устройств используется в распределенных системах управления.
Сетевые протоколы ПЛК обеспечивают очень большую гибкость системы управления. Несмотря на то, что существуют очевидные фавориты, такие как Ethernet, последовательный RS232/RS-485 и 4-20 мА, список доступных протоколов гораздо шире и разнообразнее. После трех вышеуказанных лидеров, в порядке популярности:
DeviceNet
Allen-Bradley Remote I/O
Modbus
ControlNet
Wireless protocol
Profibus
HART.
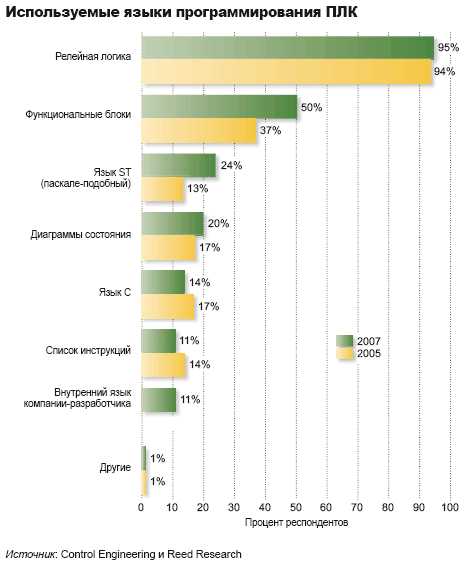
В ПЛК используются различные языки программирования, но обзор выявил явные предпочтения. Релейная схема (96 %) и функциональные блоки (50 %) возглавляют список. Этот порядок не изменился с 2005 (см. сопроводительную диаграмму). Ясно, что сместить релейную схему с вершины будет очень трудно, но программирование с использованием функциональных блоков достигло большого прогресса за последние два года. Структурный текст поднялся с шестого места в 2005 году с 13 % на третье в 2007 с 24 %. Худший результат у языка программирования C, который опустился с четвертого места в 2005 на шестое. Программирование списком инструкций за это же время переместилось с пятого на шестое место.
Процесс выбора ПЛК не так прост. Тем не менее, некоторые свойства и функции были названы очень важными при определении, рекомендации и/или покупке ПЛК. На первое место в своем хит-параде участники опроса поставили встроенные коммуникационные возможности. Другими характеристиками, выстроенными в порядке убывания значимости, являются: возможности ПИД-регулирования, малое время цикла, объем доступной памяти, поддержка функций управления перемещением, съемные картриджи памяти и беспроводные технологии.
Считают ли инженеры, что поставщики ПЛК выполняют все требования? Вполне довольны 95 % респондентов, оставшиеся 5 %, столкнулись с проблемами, которые повлияют на дальнейшие решения при покупке оборудования. Два самых часто встречающихся комментария к процессу выбора ПЛК участников опроса отражают отношение специалистов. Для этих инженеров, «стандартизация» и «отказ от закупки более сложного ПЛК, чем это необходимо» являются ключевыми критериями при выборе.
На что обращать внимание при покупке
Несмотря на то, что лишь 53 % опрошенных полагают, что объем приобретаемых ПЛК в следующем году будет тем же, рынок остается достаточно здоровым. ПЛК для производств будут приобретаться в таком же объеме и 38 % полагают, что объем закупок в ближайшее время вырастет. Какие же функции должно реализовывать приобретаемое оборудование? Важнейшие указаны ниже (в порядке убывания значимости):
Универсальная среда программирования для различных аппаратных платформ
ПЛК с системами распределенного ввода/вывода
ПЛК со встроенными модулями ввода /вывода
Связь ПЛК с ПК
Дублирование процессора и модулей ввода/вывода
Микро ПЛК
ПЛК с поддержкой web-технологий, включая оповещение по телефону/электронной почте
ПЛК со встроенными микропроцессорами PC
нано ПЛК
высоконадежные PC-контроллеры с открытой архитектурой
Переносные устройства программирования
Доступность и важность самой главной характеристики в этом списке неоднократно проявлялась в ответе на вопрос, как выбрать ПЛК: «Не пытайтесь найти самое дешевое оборудование; переподготовка специалистов для работы с новым программным обеспечением сведет всю экономию к нулю. Выберите одного-двух производителей и работайте только с ними», + вот типичный ответ.
Другой инженер управления утверждает: «Самое главное – программное обеспечение для программирования контроллеров. Различий в удобстве использования программного обеспечения гораздо больше, чем в железе». Наконец, некоторые респонденты резюмируют: «стандартизированный язык программирования крайне необходим». В любом случае, такой список пожеланий позволяет производителям ПЛК/PAC сконцентрироваться на действительно необходимых функциях.
Продукты
Используя предоставленный список, участники проведенного Control Engineering опроса, назвали следующих производителей ведущими поставщиками ПЛК. Продукция этих компаний представлена ниже. Дополнительные данные обзора, включающие вопросы пользователей, стенограмму комментариев и информацию еще о 25 компаниях-производителях ПЛК представлены в отчете, доступном на Control Engineering Resource Center. Найдите «PLCs» на сайте www.controleng.com, с последними новостями и продуктами.
Больше продуктов и производителей
Следующие поставщики также представлены в исследовании рынка продукции. Найдите «PLC» на сайте www.controleng.com, с отчетом об исследовании в Resource Center, и дополнительные описаниях продуктов в разделах Archive и New Products.
ABB (Bristol Babcock)
Advanced Micro Controls
B&R Industrial Automation
Baldor Electric
Beckhoff Automation
BoschRexroth
Control Technology Corp.
Eaton (Cutler-Hammer)
Emerson Process Management
Fuji Electric
Hitachi
IDEC
Keyence
Mitsubishi Electronics
Moeller Electric
National Instruments
Omega Engineering
Omron Electronics
Opto 22
Panasonic Electric Works
Phoenix Contact (Entivity)
Toshiba
Wago
Yaskawa Electric
Yokogawa
Гибкость, стандартизация
Для разработчиков оборудования, пытающихся стандартизировать используемые платформы управления, контроллер Allen-Bradley CompactLogix L45 является решением с гибкой масштабируемостью и встроенными функциями управления перемещением. Контролируя до восьми осей перемещения, контроллер L45 является расширением платформы Logix Control, обеспечивающей интегрированное управление движением и возможность организации распределенного управления для небольших приложений. Платформа расширила возможности процессора, среды разработки, сетевые и операторские технологии, обеспечивая полноценную интеграцию и расширяемость для использования в дискретных и серийных производствах, приложениях безопасности и перемещения.
www.rockwellautomation.com.
Rockwell Automation
Модули с высоким разрешением
AutomationDirect расширил линейку модулей DirectLogic, добавив 16-разрядные аналоговые платы, разработанные для контроллеров DL05 и DL06. Восьмиканальный модуль токовых входов F0-08ADH-1 работает с диапазоном 0-20 мА. F0-08ADH-2 имеет перемычку для выбора типа входного сигнала 0-5 В или 0-10 В. Четырехканальный F0-04DAH-1 и восьмиканальный F0-08DAH-1 модули вывода работают с диапазоном 4-20 мА, а четырехканальный F0-04DAH-2 и восьми канальный F0-08DAH-2 с диапазоном 0-10 В. Начальная цена – 129 $ (модуль F0-08ADH-1).
www.automationdirect.com
Automation Direct
Распределенный монтаж в поле
 По заявлению компании Siemens Energy & Automation, впервые появилась возможность организовать распределенную сеть Ethernet, использующую периферию бесшкафного монтажа Simatic ET200pro CPU. Степень защиты IP-65/67 позволяет устанавливать контроллер непосредственно на управляемый агрегат. Монтаж дополнительного процессора на полевом уровне уменьшает нагрузку на центральный CPU и допускает использование процессора в тяжелых эксплуатационных условиях с широким температурным диапазоном. Контроллер имеет обширные коммуникационные возможности, включая совмещенный MPI/Profibus-DP порт и три встроенных порта Ethernet. Помимо возможности работать в режиме Profibus master/slave, CPU поддерживает протокол Profinet через встроенный Ethernet порт, реализующий дополнительные возможности сети, такие как работа в детерминированном реальном времени.
По заявлению компании Siemens Energy & Automation, впервые появилась возможность организовать распределенную сеть Ethernet, использующую периферию бесшкафного монтажа Simatic ET200pro CPU. Степень защиты IP-65/67 позволяет устанавливать контроллер непосредственно на управляемый агрегат. Монтаж дополнительного процессора на полевом уровне уменьшает нагрузку на центральный CPU и допускает использование процессора в тяжелых эксплуатационных условиях с широким температурным диапазоном. Контроллер имеет обширные коммуникационные возможности, включая совмещенный MPI/Profibus-DP порт и три встроенных порта Ethernet. Помимо возможности работать в режиме Profibus master/slave, CPU поддерживает протокол Profinet через встроенный Ethernet порт, реализующий дополнительные возможности сети, такие как работа в детерминированном реальном времени.
www.usa.siemens.com.
Siemens Energy & Automation
PAC добавлены к линейке PLC
В линейке PLC Modicon, представленной в 1968 году, появился контроллер Modicon M340 PAC, платформа, реализующая функции коммуникаций, управления перемещением и сбора данных в различных средах программирования. Семейство M340 упрощает установку и эксплуатацию, используя один программный продукт: Unity Pro, полностью соответствующий стандарту IEC 61131-3. Предлагая на выбор любой из 5 языков IEC, графическое программирование, и расширенную online-поддержку, M340 обеспечивает быстрое выполнение, как логических, так и математических операций. Контроллер имеет 4 Мбайт внутренней памяти (расширяемой до 16 Мбайт), 256 Кбайт данных, и способен выполнять до 70 Кбайт программного кода.
www.us.telemecanique.com
Schneider Electric
Микроконтроллер с низкими эксплуатационными расходами
Новая система VersaMax Micro 64 от GE Fanuc Automation является частью линейки контроллеров VersaMax Micro и спроектирована с учетом необходимости уменьшения стоимость обслуживания. Удобный модуль памяти подключается к контроллеру для загрузки программы без персонального компьютера. Программа Proficy Machine Edition Logic Developer PDA позволяют использовать карманный компьютер для просмотра/изменения данных, диагностики, установки значений, и конфигурирования. Micro 64 соответствует международным стандартам, поддержка осуществляется офисами продаж и распространения GE Fanuc Automation.
www.gefanuc.com
GE Fanuc Automation
Вконтакте
Google+
controlengrussia.com
Программируемый логический контроллер Википедия
Модульный программируемый логический контроллерПрограмми́руемый логи́ческий контро́ллер (сокр. ПЛК; англ. programmable logic controller, сокр. PLC; более точный перевод на русский — контроллер с программируемой логикой), программируемый контроллер — специальная разновидность электронной вычислительной машины. Чаще всего ПЛК используют для автоматизации технологических процессов. В качестве основного режима работы ПЛК выступает его длительное автономное использование, зачастую в неблагоприятных условиях окружающей среды, без серьёзного обслуживания и практически без вмешательства человека.
Иногда на ПЛК строятся системы числового программного управления станков.
ПЛК — устройства, предназначенные для работы в системах реального времени.
ПЛК имеют ряд особенностей, отличающих их от прочих электронных приборов, применяемых в промышленности:
- в отличие от микроконтроллера (однокристального компьютера) — микросхемы, предназначенной для управления электронными устройствами — ПЛК являются самостоятельным устройством, а не отдельной микросхемой.
- в отличие от компьютеров, ориентированных на принятие решений и управление оператором, ПЛК ориентированы на работу с машинами через развитый ввод сигналов датчиков и вывод сигналов на исполнительные механизмы;
- в отличие от встраиваемых систем ПЛК изготавливаются как самостоятельные изделия, отдельные от управляемого при его помощи оборудования.
В системах управления технологическими объектами логические команды, как правило, преобладают над арифметическими операциями над числами с плавающей точкой, что позволяет при сравнительной простоте микроконтроллера (шины шириной 8 или 16 разрядов), получить мощные системы, действующие в режиме реального времени. В современных ПЛК числовые операции в языках их программирования реализуются наравне с логическими. Все языки программирования ПЛК имеют лёгкий доступ к манипулированию битами в машинных словах, в отличие от большинства высокоуровневых языков программирования современных компьютеров.
История
Первые логические контроллеры появились в виде шкафов с набором соединённых между собой реле и контактов. Эта схема не могла быть изменена после этапа проектирования и поэтому получила название — жёсткая логика. Первым в мире, программируемым логическим контроллером, в 1968 году стал Modicon 084 (1968) (от англ. modular digital controller), имевший 4 кБ памяти.
Термин PLC ввел Одо Жозеф Стругер (англ.)русск. (Allen-Bradley) в 1971 году. Он также сыграл ключевую роль в унификации языков программирования ПЛК и принятии стандарта IEC61131-3. Вместе с Ричардом Морли (англ.)русск. (Modicon) их называют ‘отцами ПЛК’. Параллельно с термином ПЛК в 1970-е годы широко использовался термин микропроцессорный командоаппарат.
В первых ПЛК, пришедших на замену релейным логическим контроллерам, логика работы программировалась схемой соединений LD. Устройство имело тот же принцип работы, но реле и контакты (кроме входных и выходных) были виртуальными, то есть существовали в виде программы, выполняемой микроконтроллером ПЛК. Современные ПЛК являются свободно программируемыми.
Виды ПЛК
Контроллер на базе персонального компьютера
Именно это направление существенно развивается в последнее время, и это обусловлено определенными причинами. Таковыми причинами являются:
- Повышение надежности ПК.
- Наличие разных модификаций ПК в обычном и промышленном исполнении.
- Использование открытой архитектуры.
- Возможность подключения любых модулей УСО, которые выпускаются другими компаниями.
- Возможность использования широкой номенклатуры наработанного программного обеспечения.
Эти контроллеры используются для управления небольшими замкнутыми объектами в промышленности, в специализированных системах автоматизации в медицине и др. направлениях. Контроллер выполняет функции, которые предусматривают сложную обработку измерительной информации с расчетом нескольких управляющих воздействий, при этом общее число входов/выходов не превышает нескольких десятков. Основными достоинствами этих контроллеров является большой объем вычислений за достаточно малый отрезок времени. Схожесть с условиями работы офисных ПК, возможность программирования на языке высокого уровня. Аппаратная поддержка обеспечивается обычными контроллерами, обладающего функциями глубокой диагностикой и устранением неисправностей без остановки работы контроллера.[1]
Локальный программируемый контроллер
ЛПК подлежит следующей классификации:
- Встраиваемый в оборудование и являющийся его неотъемлемой частью
- Автономный реализующий функции контроля и управления
Эти контроллеры имеют среднюю вычислительную способность, т.е. мощность. Она представляет собой комплексную характеристику, зависит от частоты и разрядности компьютера и объема оперативной памяти. Для реализации передачи информации с другими системами автоматизации локальные контроллеры имеют несколько физических портов. В этих контроллерах реализуются типовые функции обработки измерительной информации, блокировок, регулирования и программно-логического управления. В системах противоаварийной защиты используется специальный тип локальных контроллеров, так как они отличаются высокой надежностью, живучестью и быстродействием. Также предусматривают полную диагностику неисправностей с локализацией их и резервирования компонентов и устройства в целом.
Устройство ПЛК
Часто ПЛК состоит из следующих частей:
- центральная микросхема (микроконтроллер, или микросхема FPGA), с необходимой обвязкой;
- подсистема часов реального времени;
- энергонезависимая память;
- интерфейсы последовательного ввода-вывода (RS-485, RS-232, Ethernet)
- схемы защиты и преобразования напряжений на входах и выходах ПЛК.
Обычно вход или выход ПЛК нельзя сразу же подключить к соответствующему выходу центральной микросхемы. Эти выходы характеризуются низкими уровнями напряжений, обычно от 3,3 до 5 вольт. Входы и выходы ПЛК обычно должны работать с напряжениями 24 В постоянного либо 220 В переменного тока. Поэтому между выходом ПЛК и выходом микросхемы необходимо предусматривать усилительные и защитные элементы.
Структуры систем управления
- Централизованная: в корзину ПЛК устанавливаются модули ввода-вывода. Датчики и исполнительные устройства подключаются отдельными проводами непосредственно, либо при помощи модулей согласования к входам/выходам сигнальных модулей;
- Распределенная: удалённые от ПЛК датчики и исполнительные устройства связаны с ПЛК посредством каналов связи и, возможно, корзин-расширителей с использованием связей типа «ведущий-ведомый» (англ. Master-Slave).
Интерфейсы ПЛК
Удаленное управление и мониторинг
Языки программирования ПЛК
Для программирования ПЛК используются стандартизированные языки МЭК (IEC) стандарта IEC61131-3
Языки программирования (графические)
- LD (Ladder Diagram) — Язык релейных схем — самый распространённый язык для PLC
- FBD (Function Block Diagram) — Язык функциональных блоков — 2-й по распространённости язык для PLC
- SFC (Sequential Function Chart) — Язык диаграмм состояний — используется для программирования автоматов
- CFC (Continuous Function Chart) — Не сертифицирован IEC61131-3, дальнейшее развитие FBD
Языки программирования (текстовые)
- IL (Instruction List) — Ассемблеро-подобный язык
- ST (Structured Text) — Паскале-подобный язык
- C-YART — Си-подобный язык (YART Studio)
Структурно в IEC61131-3 среда исполнения представляет собой набор ресурсов (в большинстве случаев это и есть ПЛК, хотя некоторые мощные компьютеры под управлением многозадачных ОС предоставляют возможность запустить несколько программ типа softPLC и имитировать на одном ЦП несколько ресурсов). Ресурс предоставляет возможность исполнять задачи. Задачи представляют собой набор программ. Задачи могут вызываться циклически, по событию, с максимальной частотой.
Программа — это один из типов программных модулей POU. Модули (POU) могут быть типа программа, функциональный блок и функция. В некоторых случаях для программирования ПЛК используются нестандартные языки, например: Блок-схемы алгоритмов С-ориентированная среда разработки программ для ПЛК. HiGraph 7 — язык управления на основе графа состояний системы.
Инструменты программирования ПЛК на языках МЭК 61131-3 могут быть специализированными для отдельного семейства ПЛК или универсальными, работающими с несколькими (но далеко не всеми) типами контроллеров:
Программирование ПЛК
- Конфигурируемые: В ПЛК хранится несколько программ, а через клавиатуру ПЛК выбирается нужная версия программы;
- Свободно программируемые: программа загружается в ПЛК через его специальный интерфейс с Персонального компьютера используя специальное ПО производителя, иногда с помощью программатора.
Программирование ПЛК имеет отличие от традиционного программирования. Это связано с тем, что ПЛК исполняют бесконечную последовательность программных циклов, в каждом из которых:
- считывание входных сигналов, в том числе манипуляций, например, на клавиатуре оператором;
- вычисления выходных сигналов и проверка логических условий;
- выдача управляющих сигналов и при необходимости управление индикаторами интерфейса оператора.
Поэтому при программировании ПЛК используются флаги – булевые переменные признаков прохождения алгоритмом программы тех или иных ветвей условных переходов. Отсюда, при программировании ПЛК от программиста требуется определённый навык.
Например, процедуры начальной инициализации системы после сброса или включения питания. Эти процедуры нужно исполнять только однократно. Поэтому вводят булевую переменную (флаг) завершения инициализации, устанавливаемую при завершении инициализации. Программа анализирует этот флаг, и если он установлен, то обходит исполнение кода процедур инициализации.
См. также
Литература
- Мишель Ж. Программируемые контроллеры: архитектура и применение. — М.: Машиностроение, 1986
- Э. Парр. Программируемые контроллеры: руководство для инженера. — М.: БИНОМ. Лаборатория знаний, 2007. — 516 с. ISBN 978-5-94774-340-1
- Петров И. В. Программируемые контроллеры. Стандартные языки и приемы прикладного проектирования / Под ред. проф. В. П. Дьяконова. — М.: СОЛОН-Пресс, 2004. — 256 c. ISBN 5-98003-079-4
- Денисенко В. В. Компьютерное управление технологическим процессом, экспериментом, оборудованием. — М: Горячая Линия-Телеком, 2009. — 608 с. ISBN 978-5-9912-0060-8
- Минаев И. Г. Программируемые логические контроллеры. Практическое руководство для начинающего инженера. /И. Г. Минаев, В. В. Самойленко — Ставрополь: АГРУС, 2009. — 100 с. ISBN 978-5-9596-0609-1
- Минаев И. Г. Программируемые логические контроллеры в автоматизированных системах управления / И. Г. Минаев, В. М. Шарапов, В. В. Самойленко, Д. Г. Ушкур. 2-е изд., перераб. и доп. — Ставрополь: АГРУС, 2010. — 128 с. ISBN 978-5-9596-0670-1
- О. А. Андрюшенко, В. А. Водичев. Электронные программируемые реле серий EASY и MFD-Titan. — 2-е изд., испр. — Одесса: Одесский национальный политехнический университет, 2006. — С. 223.
- Минаев И.Г. Свободно программируемые устройства в автоматизированных системах управления / И.Г. Минаев, В.В. Самойленко, Д.Г. Ушкур, И.В. Федоренко – Ставрополь: АГРУС. 2016. – 168 с. ISBN 978-5-9596-1222-1
Примечания
- ↑ Елизаров И.А., Мартемьянов Ю.Ф., Схиртладзе А.Г., Фролов С.В. Технические средства автоматизации. Программно-технические комплексы и контроллеры: Учебное пособие. М.: «Издательство Машиностроение-1», 2004, – с.7-8 – 180 с.
Ссылки
wikiredia.ru
